
ナビゲーション装置およびナビゲーション方法
【課題】 自車の寸法データおよび旋回特性を考慮して駐車の容易な駐車場を案内するナビゲーション装置およびナビゲーション方法を提供する。
【解決手段】 自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、前記自車の寸法データを車両情報として取得する車両情報取得手段と、前記自車の旋回特性を取得する旋回特性取得手段と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、前記駐車難易度に基づき駐車の容易な前記駐車場を案内する駐車場案内手段と、を備える。
【解決手段】 自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、前記自車の寸法データを車両情報として取得する車両情報取得手段と、前記自車の旋回特性を取得する旋回特性取得手段と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、前記駐車難易度に基づき駐車の容易な前記駐車場を案内する駐車場案内手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は駐車難易度に基づいて駐車場を案内するナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
従来、自車が駐車を予定している地域の駐車場の中から、駐車場の料金および自車からの距離、ならびに自車の全幅、全高等の寸法データを考慮して駐車場を選択するナビゲーション装置が知られている(例えば、特許文献1参照)。
しかしながら、特許文献1においては、全幅、全高に合致する駐車場内に自車が入ることができても、実際に駐車スペースに自車を駐車するとき、あるいはタワー式の駐車場ではターンテーブルに到達するまでの通路を通るときに何度も自車を切り返さなければならない場合がある。したがって、車両の寸法データによる判定だけでは駐車が困難な駐車場が抽出される恐れがある。
【0003】
【特許文献1】特開2001−349740号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上記問題を解決するためになされたものであり、自車の寸法データおよび旋回特性を考慮して駐車場を案内するナビゲーション装置およびナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記目的を達成するためのナビゲーション装置は、自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、前記自車の寸法データを車両情報として取得する車両情報取得手段と、前記自車の旋回特性を取得する旋回特性取得手段と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、前記駐車難易度に基づき前記駐車場を案内する駐車場案内手段と、を備える。
【0006】
ここで、車両移動可能範囲とは、駐車場の入口から入って駐車し出口から出ていくまでに車両が移動を許されている範囲を表している。また駐車場とは、平地式、立体式、タワー式、またはこれら以外のいずれかの形式の駐車場に限るものではなく、定められた駐車スペースに車両を駐車させる駐車場を表している。
ナビゲーション装置は、自車の寸法データにより決定される静的な駐車難易度に加え、自車を駐車するときに旋回特性に基づいて自車の動きを考慮した動的な駐車難易度により駐車場に対する自車の駐車難易度を判定するので、自車が入出可能な駐車場から、旋回特性に基づく自車の動きを考慮して駐車場を案内できる。
【0007】
(2)前記駐車難易度判定手段は、前記全幅と前記ドア幅と前記駐車幅とに基づいて駐車してからの乗降難易度を判定し、前記駐車難易度に前記乗降難易度を含めてもよい。
駐車幅と自車の全幅との差が同じであっても、ドア幅の大きな車の場合、ドア幅の小さい車よりもドアの開く角度が小さくなる。したがって、ドア幅が大きくなると、車の乗降が困難になる。そこでナビゲーション装置は、駐車するときの自車の駐車動作の難易度に加え、駐車後の乗降難易度も考慮して駐車難易度を判定するので、総合的な駐車難易度に基づいて駐車場を案内できる。
【0008】
(3)前記旋回特性取得手段は、前記自車が旋回するときの内周軌跡および外周軌跡を前記旋回特性として取得してもよい。
車両が旋回するときは、内周軌跡と外周軌跡との範囲内で移動するので、ナビゲーション装置は、内周軌跡および外周軌跡を旋回特性として取得することにより、駐車動作が可能な範囲から自車が外れることを確実に判定できる。
【0009】
(4)前記旋回特性取得手段は、前記車両情報取得手段が取得する最小回転半径および前記寸法データから、前記内周軌跡および前記外周軌跡を規定してもよい。
-28982?両の最小回転半径および寸法データは、例えばユーザがカタログデータ等から容易に入力できる。したがって、ナビゲーション装置は、どのような車種であっても、入力された最小回転半径および寸法データから自車の内周軌跡および外周軌跡を規定できる。これにより、駐車難易度を判定するナビゲーション装置の汎用性が向上する。
【0010】
(5)前記駐車難易度判定手段は、前記駐車場の駐車スペースに前記自車が駐車するまでに必要な切り返し回数を前記旋回特性に基づいて算出し、前記切り返し回数に応じて前記駐車難易度を判定してもよい。
自車が旋回しながら駐車スペースに駐車するときに切り返し回数が多くなるほど、駐車動作が煩雑になるとともに、駐車に要する時間が長くなる。したがって、ナビゲーション装置は、旋回特性に基づいて算出した切り返し回数が多いほど駐車が困難であると判定できる。
【0011】
(6)上記目的を達成するためのナビゲーション方法は、自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得段階と、前記自車の寸法データを車両情報として取得する車両情報取得段階と、前記自車の旋回特性を取得する旋回特性取得段階と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定段階と、前記駐車難易度に基づき前記駐車場を案内する駐車場案内段階と、マッチング手段と信号判定手段が分かれているはなぜ。を含む。
【0012】
ナビゲーション方法は、自車の寸法データにより決定される静的な駐車難易度に加え、自車を駐車するときに旋回特性に基づいて自車の動きを考慮した動的な駐車難易度により駐車場に対する自車の駐車難易度を判定するので、自車が入出可能な駐車場から、旋回特性に基づく自車の動きを考慮して駐車場を案内できる。
【0013】
尚、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、またはそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。また、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順序で実行されてもよく、また同時に実行されてもよい。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図に基づいて説明する。
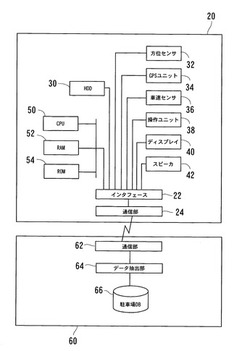
図1は本発明の一実施形態によるナビゲーション装置20のハードウェア構成を示すブロック図である。ナビゲーション装置20は自動車、オートバイ等の車両に搭載される。ナビゲーション装置20は、目的地点までの推奨経路や自車100(図3参照)の走行地点を案内するものである。インタフェース22は、AD変換器、DA変換器等で構成され、ナビゲーション装置20内のCPU50と各ブロックとの信号形態の変換、ならびに通信部24を介して駐車場情報センター60との通信信号形態の変換を行う。
【0015】
ハードディスク装置(HDD)30には、地図データベース(地図DB)、車両情報データベース(車両情報DB)等が格納されている。
方位センサ32は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
【0016】
GPSユニット34は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信し、自車100の現在地の緯度経度データを出力するためのアンテナ、ASIC(Application Specific Integrated Circuit)等で構成される。
自車100の走行速度を検出する車速センサ36は、推測航法による位置検出手段としても用いられる。車速を時間で積分することにより走行距離が求まる。電波や超音波を用いたドップラ対地速度センサ、光と空間フィルタを用いた対地速度センサを用いて走行距離を求めてもよい。
【0017】
操作ユニット38は、目的地の入力等に用いるリモートコントローラ、操作パネル等で構成される。目的地はマイクによって音声入力し、音声入力された目的地を音声認識してもよい。
駐車場案内手段としてのディスプレイ40は、地図や各種の警告表示に用いるLCD(Liquid Crystal Display)、HUD(Head Up Display)等で構成される。駐車場の探索時には、駐車予定地域の駐車場がディスプレイ40に表示される。警告表示は、地図表示に用いるディスプレイとは別のディスプレイ、例えば車速、距離、エンジン回転数等を表示するディスプレイで表示してもよい。
【0018】
スピーカ42は、車両の走行経路、走行状態を案内する音声出力、および各種警告を告知する音声出力に用いられる。スピーカ42はオーディオスピーカと共用してもよいし、ナビゲーション専用のものを設けてもよい。
CPU50は、制御プログラムを実行することにより、ナビゲーション装置20内の各部を制御するとともに、自車100が走行している走行道路を特定する。
【0019】
RAM52は、CPU50で処理されるデータやプログラムを一時的に格納する。ROM54は、CPU50で実行される制御プログラムを格納している書き換え可能な不揮発性のメモリであり、EEPROM等を用いる。制御プログラムはHDD30に格納してもよい。制御プログラム、地図DB、車両情報DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもHDD30またはROM54に格納することができる。
【0020】
駐車場情報センター60は、各地域の駐車場情報を駐車場DB66から通信部62を介して各車両に送信する。本実施形態では、駐車場情報センター60は、各車両から問い合わせがある場合、各車両から指定された地域の駐車場情報をデータ抽出部64により駐車場DB66から抽出し、要求車両に送信する。
本実施形態では、駐車場情報を駐車場情報センター60から取得するが、地図DB70と同様に、ナビゲーション装置自体に駐車場情報DBを備えてもよい。
【0021】
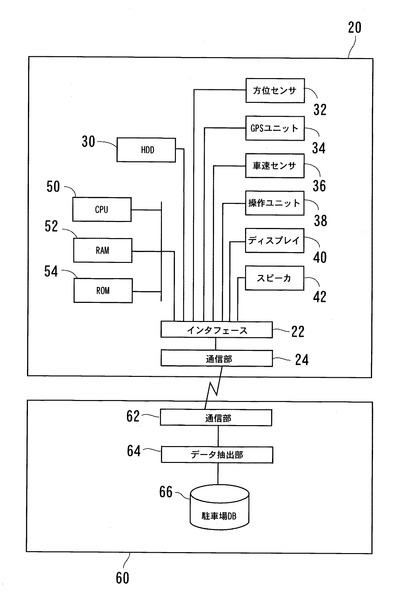
図2はナビゲーション装置20の制御プログラムのソフトウェア構成を示すブロック図である。
地図DB70は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、自車位置の検出、ならびに推奨経路の探索及び表示に用いられる。地図DB70では、交差点、曲がり点、行き止まり点などはノードであり、道路はノードとノードを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、幅員、コーナーの半径等が属性情報として定義されている。
【0022】
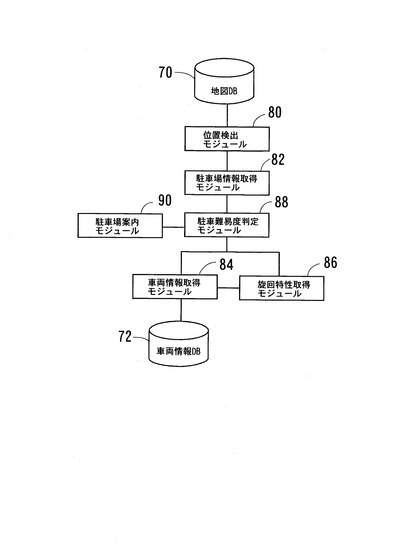
車両情報DB72は、自車100の車両情報、例えば、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3およびドア幅W1等の自車100の寸法データ、ならびに最小回転半径等が記録されたデータベースである。車両情報DB72の内容は、自車100の購入時に自車100の車種に応じて予め記録されていてもよいし、自車100を購入後にユーザが自分で入力してもよい。
【0023】
位置検出モジュール80は、CPU50を位置検出手段として機能させるプログラム部品である。位置検出モジュール80は、地図DB70を用いてマップマッチングによる補正を行いながら、GPSユニット34から入力される自車100の現在地の緯度経度データと、車速センサ36等を用いた距離センサから入力される走行距離と、方位センサ32から入力される進行方位とに基づいて自車位置を検出する。
【0024】
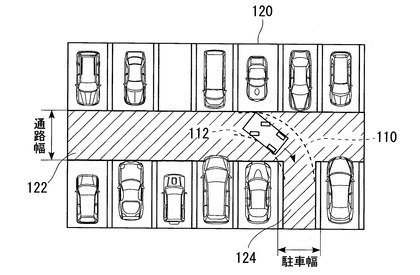
駐車場情報取得モジュール82は、CPU50を駐車場情報取得手段として機能させるプログラム部品である。駐車場情報取得モジュール82は、操作ユニット38から自車100が駐車を予定している地域が入力され駐車場の探索が要求されると、駐車予定地域の駐車場の探索要求を通信部24を介して駐車場情報センター60に送信する。駐車場情報センター60は、データ抽出部64により要求された地域の駐車場を抽出し、通信部62を介して抽出された駐車場の駐車場情報を要求車両に送信する。駐車場情報とは、駐車場120(図5参照)の入出口の幅および高さ、駐車スペース124に到る通路幅、駐車スペース124の1台当たりの駐車幅等である。駐車場情報取得モジュール82は、駐車場120の通路幅および駐車幅から駐車スペース124に自車100を駐車するときの駐車動作可能範囲122を算出する。図5に斜線で示す駐車動作可能範囲122は、駐車場120の通路幅と、一つの駐車スペース124の駐車幅とを含む範囲を表す。駐車場120の通路幅および駐車幅から算出した駐車動作可能範囲122と、駐車場120の入出口の幅および高さとを含めて、駐車場120の入口から進入して駐車し、駐車場120の出口から出て行くまでに自車100が移動可能な車両移動可能範囲として表す。
【0025】
図2に示す車両情報取得モジュール84は、CPU50を車両情報取得手段として機能させるプログラム部品である。車両情報取得モジュール84は、駐車場探索要求が発生すると、駐車場に自車100を駐車するときの難易度を判定するために必要な自車100の車両情報、つまり前述した、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3、ドア幅W1等の寸法データと、最小回転半径とを車両情報DB72から読み出して取得する。
【0026】
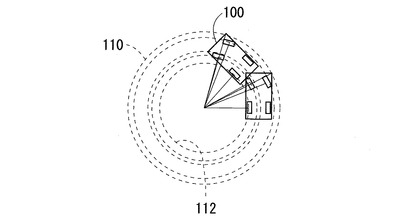
旋回特性取得モジュール86は、CPU50を旋回特性取得手段として機能させるプログラム部品である。具体的には、車両情報取得モジュール84が取得した自車100の最小回転半径と寸法データとから、図4に示すように自車100が旋回するときの外周軌跡110および内周軌跡112を算出する。また、外周軌跡110および内周軌跡112で表される旋回特性は、自車100の車両情報として、予め車両情報DB72に記録されていてもよい。
【0027】
駐車難易度判定モジュールは88は、CPU50を駐車難易度判定手段として機能させるプログラム部品である。まず、駐車難易度判定モジュールは88は、駐車場120の入出口の幅と自車100の全幅W0、ならびに駐車場120の入出口の高さと自車100全高Hとを比較して駐車場120に自車が入出できるかを判定する。
【0028】
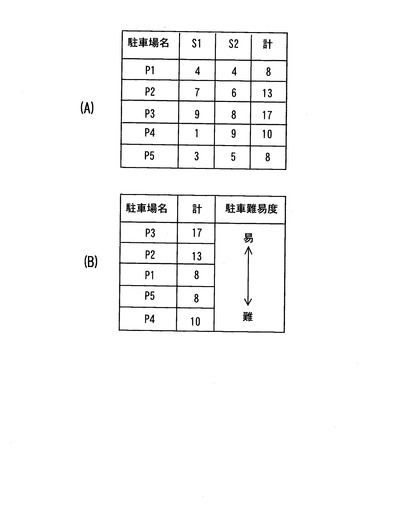
次に、駐車難易度判定モジュールは88は、入出可能な駐車場120において、図5に示すように駐車スペース124に自車100が旋回しながら移動するときに、外周軌跡110または内周軌跡112が駐車場120の駐車動作可能範囲122から外れると、周囲の車、柱または壁等に自車100が衝突するので、自車100の切り返しが必要であると判断する。そして、駐車難易度判定モジュールは88は、駐車スペース124に駐車できるまでの自車100の切り返し回数をカウントする。そして駐車難易度判定モジュール88は、駐車スペース124に駐車するまでの切り返し回数から、駐車難易度を図7の(A)に示す点数S1として設定する。S1は10点満点であり、点数が高いほど駐車スペース124に移動するときの切り返し回数が少なく駐車が容易であることを表している。例えば、切り返しなしで駐車スペース124に自車100を移動できれば10点満点となる。
【0029】
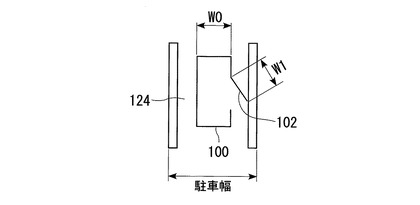
また駐車難易度判定モジュールは88は、図6に示すように、自車100の全幅W0と自車100のドア幅W1と駐車スペース124の駐車幅とからドア102の開く角度を算出する。ドア102の開く角度が大きくなるほど乗降が容易である。駐車難易度判定モジュール88は、このドア102の開く角度に基づいて駐車難易度に含まれる乗降難易度を図7の(A)に示す点数S2として設定する。点数が高いほどドア102の開き角度が大きくなることを表している。例えば、ドア102を最大角度まで開くことができれば10点満点となる。
また駐車難易度判定モジュールは88は、後方視界の悪い車両では後方駐車する場合駐車の難易度が高いため、一般車両、または前方駐車に比べ、点数S1を減算するようにしてもよい。
【0030】
基本的には、駐車難易度判定モジュール88は、(S1+S2)が表す合計点数の高い駐車場ほど駐車が容易であると判定する。尚、合計点数が同じ場合は、切り返し回数が少なく点数S1の高い駐車場ほど駐車が容易であると判定する。図7の(B)は、駐車難易度に基づいて駐車が容易な順に駐車場を並び替えたものである。図7の(B)に示すように、駐車場P1と駐車場P5では(S1+S2)が表す合計点数は8点で同じであるが、駐車場P1の方が駐車場P5よりも点数S1が高いので、駐車が容易であると判定する。
【0031】
ただし、点数S1または点数S2のいずれかが所定点数以下、例えば2点以下であれば、他の駐車場より合計点数が高くても駐車が困難であると判断する。図7の(B)に示すように、駐車場P4の合計点数は駐車場P1、P5よりも高いが、点数S1が1点であるため、駐車が最も困難であると判定される。
駐車場案内モジュールは90は、CPU50を駐車場案内手段として機能させるプログラム部品である。駐車場案内モジュールは90は、駐車難易度判定モジュール88で判定した駐車難易度に基づき、ディスプレイ40に駐車の容易な駐車場を案内する。例えば、ディスプレイ40に表示されている駐車場に難易度に応じて点数を表示する。
【0032】
次に、ナビゲーション装置の作動について説明する。
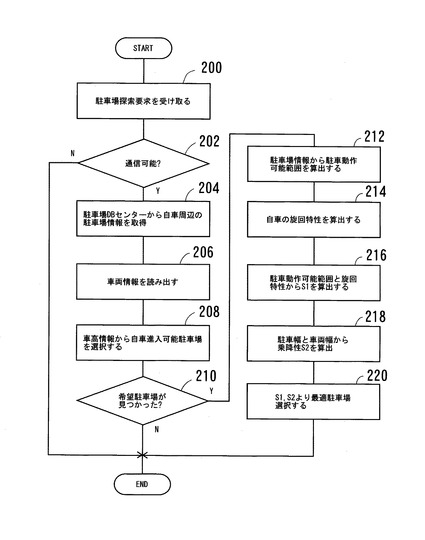
図8はナビゲーション装置20の駐車場案内プログラムの流れを示すフローチャートである。図8に示す処理は、操作ユニット38が駐車予定地域の駐車場探索要求を受け取ると実行される。
ステップ200では、ナビゲーション装置20は、ユーザの操作により操作ユニット38から駐車場探索要求を受け取る。このとき、ナビゲーション装置20は、駐車場を探索する地域を、例えば自車100の現在位置の周辺として受け取る。さらに、ユーザは、自車100の現在位置から駐車場までの希望到達時間を操作ユニット38から入力してもよい。ナビゲーション装置20は、駐車場の探索地域として、目的地点の地名を受け取ってもよい。
【0033】
ステップ202において、ナビゲーション装置20は、駐車場情報センター60との通信が可能かを判定する。例えば、通信可能範囲内に駐車場情報センター60がなく、自車100からの探索要求に対して駐車場情報センター60から応答がない場合、通信不能と判断して本処理を終了する。
【0034】
ナビゲーション装置20は、駐車場情報センター60から応答があれば、ステップ204において自車位置を駐車場情報センター60に送信する。駐車場情報センター60は、送信された車両位置からその周辺の駐車場を抽出する。ナビゲーション装置20は、駐車場情報センター60から抽出された自車位置周辺の駐車場情報を取得する。
【0035】
ステップ206において、ナビゲーション装置20は、車両情報DB72から、自車100の最小回転半径、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3、ドア幅W1等の車両情報を読み出す。
ステップ208において、ナビゲーション装置20は、駐車場情報センター60から取得した各駐車場の入出口の高さおよび幅と自車100の全高Hおよび全幅W0とを比較し、自車100が進入できる駐車場を選択する。
【0036】
さらに、ステップ210においてナビゲーション装置20は、進入可能な駐車場の中で、自車位置から希望到達時間を満たす駐車場があるかを判定する。希望到達時間を満たす駐車場がない場合は、本処理を終了する。
希望駐車場が見つかった場合、ステップ212においてナビゲーション装置20は、各希望駐車場について、駐車場120の通路幅、駐車スペース124の駐車幅等から、駐車動作可能範囲122を算出する。
【0037】
ステップ214においてナビゲーション装置20は、車両情報DB72から読み出した自車100の車両情報から、自車100が旋回するときの旋回特性である外周軌跡110、内周軌跡112を算出する。
ステップ216においてナビゲーション装置20は、駐車場120の駐車動作可能範囲122と自車100の旋回特性とに基づいて駐車スペース124に自車100を移動するときの切り返し回数を算出し、切り返し回数に応じて前述した点数S1を設定する。
【0038】
ステップ218においてナビゲーション装置20は、駐車場の駐車幅と自車100の全幅W0とドア幅W1とから前述した点数S2を設定する。
ステップ220においてナビゲーション装置20は、S1、S2、(S1+S2)の点数に基づいて各駐車場に駐車難易度を設定し、ディスプレイ40等で駐車の容易な駐車場を案内する。
本実施形態では、このように、自車100の寸法データにより判定される駐車難易度と、自車100を駐車スペース124に移動する旋回特性により判定される駐車難易度とから、駐車難易度を総合的に判定し、駐車の容易な駐車場を案内できる。
【0039】
(他の実施形態)
以上説明した上記実施形態において説明した、自車100の寸法データ、ならびに駐車スペース124に自車100を移動するときの自車100の旋回特性を考慮した駐車難易度の判定は、平地駐車場、立体駐車場に限らずタワー式の駐車場にも適用できる。立体式の駐車場の場合は、通常各階における駐車場の構造は同じであるから、1階分の駐車場情報に基づいて駐車難易度を判定する。階によって駐車場の構造が異なる場合は、各階について駐車難易度を判定すればよい。また、タワー式駐車場においても、ターンテーブルに自車を移動する途中の通路の幅、角度等により自車を旋回させることがある。したがって、自車の旋回特性を考慮してタワー式の駐車場への駐車難易度を判定できる。
上記実施形態では、自車100の全幅W0とドア幅W1と駐車スペース124の駐車幅とから駐車後の乗降の難易度を駐車難易度に含めて駐車難易度を判定したが、乗降難易度を駐車難易度に含めずに駐車難易度を判定してもよい。
【0040】
また上記実施形態では、駐車場探索要求を受け取るステップ200において希望到達時間を入力し、ステップ210において、進入可能な駐車場の中で自車位置から希望到達時間を満たす駐車場があるかを判定し、希望駐車場が見つかった場合にその希望駐車場について駐車難易度を判定するようにした。これに対し、希望到達時間を入力せずに、駐車場の探索地域に存在する駐車場についてそれぞれ到達時間を求め、到達時間から新たに点数S3を設定するようにしてもよい。S3は例えば10点満点であり、点数が高いほど自車100の現在位置、もしくは目的地点から短い時間で到着できる駐車場であることを表している。そして、S3、(S1+S3)、(S2+S3)、(S1+S2+S3)に基づいて駐車難易度を設定するようにしてもよい。
【図面の簡単な説明】
【0041】
【図1】本実施形態によるハードウェアのブロック図。
【図2】本実施形態によるソフトウェアのブロック図。
【図3】(A)は自車の側面図、(B)は(A)のB方向矢視図。
【図4】自車の旋回軌跡を示す説明図。
【図5】駐車動作可能範囲を示す説明図。
【図6】駐車スペースに駐車した自車の状態を示す説明図。
【図7】(A)は、各駐車場の点数S1、S2、(S1+S2)を示す点数図、(B)は点数を総合的に判定した駐車難易度を示す説明図。
【図8】駐車場案内のフローチャート。
【符号の説明】
【0042】
20ナビゲーション装置、32:方位センサ(位置検出手段)、34:GPSユニット(位置検出手段)、36:車速センサ(位置検出手段)、40:ディスプレイ(駐車場案内手段)、42:スピーカ、50:CPU(駐車場情報取得手段、車両情報取得手段、旋回特性取得手段、駐車難易度判定手段、駐車場案内手段)、100:自車、102:ドア、110:外周軌跡(旋回特性)、112:内周軌跡(旋回特性)120:駐車場、124:駐車スペース、124:駐車動作可能範囲
【技術分野】
【0001】
本発明は駐車難易度に基づいて駐車場を案内するナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
従来、自車が駐車を予定している地域の駐車場の中から、駐車場の料金および自車からの距離、ならびに自車の全幅、全高等の寸法データを考慮して駐車場を選択するナビゲーション装置が知られている(例えば、特許文献1参照)。
しかしながら、特許文献1においては、全幅、全高に合致する駐車場内に自車が入ることができても、実際に駐車スペースに自車を駐車するとき、あるいはタワー式の駐車場ではターンテーブルに到達するまでの通路を通るときに何度も自車を切り返さなければならない場合がある。したがって、車両の寸法データによる判定だけでは駐車が困難な駐車場が抽出される恐れがある。
【0003】
【特許文献1】特開2001−349740号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上記問題を解決するためになされたものであり、自車の寸法データおよび旋回特性を考慮して駐車場を案内するナビゲーション装置およびナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記目的を達成するためのナビゲーション装置は、自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、前記自車の寸法データを車両情報として取得する車両情報取得手段と、前記自車の旋回特性を取得する旋回特性取得手段と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、前記駐車難易度に基づき前記駐車場を案内する駐車場案内手段と、を備える。
【0006】
ここで、車両移動可能範囲とは、駐車場の入口から入って駐車し出口から出ていくまでに車両が移動を許されている範囲を表している。また駐車場とは、平地式、立体式、タワー式、またはこれら以外のいずれかの形式の駐車場に限るものではなく、定められた駐車スペースに車両を駐車させる駐車場を表している。
ナビゲーション装置は、自車の寸法データにより決定される静的な駐車難易度に加え、自車を駐車するときに旋回特性に基づいて自車の動きを考慮した動的な駐車難易度により駐車場に対する自車の駐車難易度を判定するので、自車が入出可能な駐車場から、旋回特性に基づく自車の動きを考慮して駐車場を案内できる。
【0007】
(2)前記駐車難易度判定手段は、前記全幅と前記ドア幅と前記駐車幅とに基づいて駐車してからの乗降難易度を判定し、前記駐車難易度に前記乗降難易度を含めてもよい。
駐車幅と自車の全幅との差が同じであっても、ドア幅の大きな車の場合、ドア幅の小さい車よりもドアの開く角度が小さくなる。したがって、ドア幅が大きくなると、車の乗降が困難になる。そこでナビゲーション装置は、駐車するときの自車の駐車動作の難易度に加え、駐車後の乗降難易度も考慮して駐車難易度を判定するので、総合的な駐車難易度に基づいて駐車場を案内できる。
【0008】
(3)前記旋回特性取得手段は、前記自車が旋回するときの内周軌跡および外周軌跡を前記旋回特性として取得してもよい。
車両が旋回するときは、内周軌跡と外周軌跡との範囲内で移動するので、ナビゲーション装置は、内周軌跡および外周軌跡を旋回特性として取得することにより、駐車動作が可能な範囲から自車が外れることを確実に判定できる。
【0009】
(4)前記旋回特性取得手段は、前記車両情報取得手段が取得する最小回転半径および前記寸法データから、前記内周軌跡および前記外周軌跡を規定してもよい。
-28982?両の最小回転半径および寸法データは、例えばユーザがカタログデータ等から容易に入力できる。したがって、ナビゲーション装置は、どのような車種であっても、入力された最小回転半径および寸法データから自車の内周軌跡および外周軌跡を規定できる。これにより、駐車難易度を判定するナビゲーション装置の汎用性が向上する。
【0010】
(5)前記駐車難易度判定手段は、前記駐車場の駐車スペースに前記自車が駐車するまでに必要な切り返し回数を前記旋回特性に基づいて算出し、前記切り返し回数に応じて前記駐車難易度を判定してもよい。
自車が旋回しながら駐車スペースに駐車するときに切り返し回数が多くなるほど、駐車動作が煩雑になるとともに、駐車に要する時間が長くなる。したがって、ナビゲーション装置は、旋回特性に基づいて算出した切り返し回数が多いほど駐車が困難であると判定できる。
【0011】
(6)上記目的を達成するためのナビゲーション方法は、自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得段階と、前記自車の寸法データを車両情報として取得する車両情報取得段階と、前記自車の旋回特性を取得する旋回特性取得段階と、前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定段階と、前記駐車難易度に基づき前記駐車場を案内する駐車場案内段階と、マッチング手段と信号判定手段が分かれているはなぜ。を含む。
【0012】
ナビゲーション方法は、自車の寸法データにより決定される静的な駐車難易度に加え、自車を駐車するときに旋回特性に基づいて自車の動きを考慮した動的な駐車難易度により駐車場に対する自車の駐車難易度を判定するので、自車が入出可能な駐車場から、旋回特性に基づく自車の動きを考慮して駐車場を案内できる。
【0013】
尚、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、またはそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。また、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順序で実行されてもよく、また同時に実行されてもよい。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図に基づいて説明する。
図1は本発明の一実施形態によるナビゲーション装置20のハードウェア構成を示すブロック図である。ナビゲーション装置20は自動車、オートバイ等の車両に搭載される。ナビゲーション装置20は、目的地点までの推奨経路や自車100(図3参照)の走行地点を案内するものである。インタフェース22は、AD変換器、DA変換器等で構成され、ナビゲーション装置20内のCPU50と各ブロックとの信号形態の変換、ならびに通信部24を介して駐車場情報センター60との通信信号形態の変換を行う。
【0015】
ハードディスク装置(HDD)30には、地図データベース(地図DB)、車両情報データベース(車両情報DB)等が格納されている。
方位センサ32は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
【0016】
GPSユニット34は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信し、自車100の現在地の緯度経度データを出力するためのアンテナ、ASIC(Application Specific Integrated Circuit)等で構成される。
自車100の走行速度を検出する車速センサ36は、推測航法による位置検出手段としても用いられる。車速を時間で積分することにより走行距離が求まる。電波や超音波を用いたドップラ対地速度センサ、光と空間フィルタを用いた対地速度センサを用いて走行距離を求めてもよい。
【0017】
操作ユニット38は、目的地の入力等に用いるリモートコントローラ、操作パネル等で構成される。目的地はマイクによって音声入力し、音声入力された目的地を音声認識してもよい。
駐車場案内手段としてのディスプレイ40は、地図や各種の警告表示に用いるLCD(Liquid Crystal Display)、HUD(Head Up Display)等で構成される。駐車場の探索時には、駐車予定地域の駐車場がディスプレイ40に表示される。警告表示は、地図表示に用いるディスプレイとは別のディスプレイ、例えば車速、距離、エンジン回転数等を表示するディスプレイで表示してもよい。
【0018】
スピーカ42は、車両の走行経路、走行状態を案内する音声出力、および各種警告を告知する音声出力に用いられる。スピーカ42はオーディオスピーカと共用してもよいし、ナビゲーション専用のものを設けてもよい。
CPU50は、制御プログラムを実行することにより、ナビゲーション装置20内の各部を制御するとともに、自車100が走行している走行道路を特定する。
【0019】
RAM52は、CPU50で処理されるデータやプログラムを一時的に格納する。ROM54は、CPU50で実行される制御プログラムを格納している書き換え可能な不揮発性のメモリであり、EEPROM等を用いる。制御プログラムはHDD30に格納してもよい。制御プログラム、地図DB、車両情報DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもHDD30またはROM54に格納することができる。
【0020】
駐車場情報センター60は、各地域の駐車場情報を駐車場DB66から通信部62を介して各車両に送信する。本実施形態では、駐車場情報センター60は、各車両から問い合わせがある場合、各車両から指定された地域の駐車場情報をデータ抽出部64により駐車場DB66から抽出し、要求車両に送信する。
本実施形態では、駐車場情報を駐車場情報センター60から取得するが、地図DB70と同様に、ナビゲーション装置自体に駐車場情報DBを備えてもよい。
【0021】
図2はナビゲーション装置20の制御プログラムのソフトウェア構成を示すブロック図である。
地図DB70は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、自車位置の検出、ならびに推奨経路の探索及び表示に用いられる。地図DB70では、交差点、曲がり点、行き止まり点などはノードであり、道路はノードとノードを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、幅員、コーナーの半径等が属性情報として定義されている。
【0022】
車両情報DB72は、自車100の車両情報、例えば、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3およびドア幅W1等の自車100の寸法データ、ならびに最小回転半径等が記録されたデータベースである。車両情報DB72の内容は、自車100の購入時に自車100の車種に応じて予め記録されていてもよいし、自車100を購入後にユーザが自分で入力してもよい。
【0023】
位置検出モジュール80は、CPU50を位置検出手段として機能させるプログラム部品である。位置検出モジュール80は、地図DB70を用いてマップマッチングによる補正を行いながら、GPSユニット34から入力される自車100の現在地の緯度経度データと、車速センサ36等を用いた距離センサから入力される走行距離と、方位センサ32から入力される進行方位とに基づいて自車位置を検出する。
【0024】
駐車場情報取得モジュール82は、CPU50を駐車場情報取得手段として機能させるプログラム部品である。駐車場情報取得モジュール82は、操作ユニット38から自車100が駐車を予定している地域が入力され駐車場の探索が要求されると、駐車予定地域の駐車場の探索要求を通信部24を介して駐車場情報センター60に送信する。駐車場情報センター60は、データ抽出部64により要求された地域の駐車場を抽出し、通信部62を介して抽出された駐車場の駐車場情報を要求車両に送信する。駐車場情報とは、駐車場120(図5参照)の入出口の幅および高さ、駐車スペース124に到る通路幅、駐車スペース124の1台当たりの駐車幅等である。駐車場情報取得モジュール82は、駐車場120の通路幅および駐車幅から駐車スペース124に自車100を駐車するときの駐車動作可能範囲122を算出する。図5に斜線で示す駐車動作可能範囲122は、駐車場120の通路幅と、一つの駐車スペース124の駐車幅とを含む範囲を表す。駐車場120の通路幅および駐車幅から算出した駐車動作可能範囲122と、駐車場120の入出口の幅および高さとを含めて、駐車場120の入口から進入して駐車し、駐車場120の出口から出て行くまでに自車100が移動可能な車両移動可能範囲として表す。
【0025】
図2に示す車両情報取得モジュール84は、CPU50を車両情報取得手段として機能させるプログラム部品である。車両情報取得モジュール84は、駐車場探索要求が発生すると、駐車場に自車100を駐車するときの難易度を判定するために必要な自車100の車両情報、つまり前述した、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3、ドア幅W1等の寸法データと、最小回転半径とを車両情報DB72から読み出して取得する。
【0026】
旋回特性取得モジュール86は、CPU50を旋回特性取得手段として機能させるプログラム部品である。具体的には、車両情報取得モジュール84が取得した自車100の最小回転半径と寸法データとから、図4に示すように自車100が旋回するときの外周軌跡110および内周軌跡112を算出する。また、外周軌跡110および内周軌跡112で表される旋回特性は、自車100の車両情報として、予め車両情報DB72に記録されていてもよい。
【0027】
駐車難易度判定モジュールは88は、CPU50を駐車難易度判定手段として機能させるプログラム部品である。まず、駐車難易度判定モジュールは88は、駐車場120の入出口の幅と自車100の全幅W0、ならびに駐車場120の入出口の高さと自車100全高Hとを比較して駐車場120に自車が入出できるかを判定する。
【0028】
次に、駐車難易度判定モジュールは88は、入出可能な駐車場120において、図5に示すように駐車スペース124に自車100が旋回しながら移動するときに、外周軌跡110または内周軌跡112が駐車場120の駐車動作可能範囲122から外れると、周囲の車、柱または壁等に自車100が衝突するので、自車100の切り返しが必要であると判断する。そして、駐車難易度判定モジュールは88は、駐車スペース124に駐車できるまでの自車100の切り返し回数をカウントする。そして駐車難易度判定モジュール88は、駐車スペース124に駐車するまでの切り返し回数から、駐車難易度を図7の(A)に示す点数S1として設定する。S1は10点満点であり、点数が高いほど駐車スペース124に移動するときの切り返し回数が少なく駐車が容易であることを表している。例えば、切り返しなしで駐車スペース124に自車100を移動できれば10点満点となる。
【0029】
また駐車難易度判定モジュールは88は、図6に示すように、自車100の全幅W0と自車100のドア幅W1と駐車スペース124の駐車幅とからドア102の開く角度を算出する。ドア102の開く角度が大きくなるほど乗降が容易である。駐車難易度判定モジュール88は、このドア102の開く角度に基づいて駐車難易度に含まれる乗降難易度を図7の(A)に示す点数S2として設定する。点数が高いほどドア102の開き角度が大きくなることを表している。例えば、ドア102を最大角度まで開くことができれば10点満点となる。
また駐車難易度判定モジュールは88は、後方視界の悪い車両では後方駐車する場合駐車の難易度が高いため、一般車両、または前方駐車に比べ、点数S1を減算するようにしてもよい。
【0030】
基本的には、駐車難易度判定モジュール88は、(S1+S2)が表す合計点数の高い駐車場ほど駐車が容易であると判定する。尚、合計点数が同じ場合は、切り返し回数が少なく点数S1の高い駐車場ほど駐車が容易であると判定する。図7の(B)は、駐車難易度に基づいて駐車が容易な順に駐車場を並び替えたものである。図7の(B)に示すように、駐車場P1と駐車場P5では(S1+S2)が表す合計点数は8点で同じであるが、駐車場P1の方が駐車場P5よりも点数S1が高いので、駐車が容易であると判定する。
【0031】
ただし、点数S1または点数S2のいずれかが所定点数以下、例えば2点以下であれば、他の駐車場より合計点数が高くても駐車が困難であると判断する。図7の(B)に示すように、駐車場P4の合計点数は駐車場P1、P5よりも高いが、点数S1が1点であるため、駐車が最も困難であると判定される。
駐車場案内モジュールは90は、CPU50を駐車場案内手段として機能させるプログラム部品である。駐車場案内モジュールは90は、駐車難易度判定モジュール88で判定した駐車難易度に基づき、ディスプレイ40に駐車の容易な駐車場を案内する。例えば、ディスプレイ40に表示されている駐車場に難易度に応じて点数を表示する。
【0032】
次に、ナビゲーション装置の作動について説明する。
図8はナビゲーション装置20の駐車場案内プログラムの流れを示すフローチャートである。図8に示す処理は、操作ユニット38が駐車予定地域の駐車場探索要求を受け取ると実行される。
ステップ200では、ナビゲーション装置20は、ユーザの操作により操作ユニット38から駐車場探索要求を受け取る。このとき、ナビゲーション装置20は、駐車場を探索する地域を、例えば自車100の現在位置の周辺として受け取る。さらに、ユーザは、自車100の現在位置から駐車場までの希望到達時間を操作ユニット38から入力してもよい。ナビゲーション装置20は、駐車場の探索地域として、目的地点の地名を受け取ってもよい。
【0033】
ステップ202において、ナビゲーション装置20は、駐車場情報センター60との通信が可能かを判定する。例えば、通信可能範囲内に駐車場情報センター60がなく、自車100からの探索要求に対して駐車場情報センター60から応答がない場合、通信不能と判断して本処理を終了する。
【0034】
ナビゲーション装置20は、駐車場情報センター60から応答があれば、ステップ204において自車位置を駐車場情報センター60に送信する。駐車場情報センター60は、送信された車両位置からその周辺の駐車場を抽出する。ナビゲーション装置20は、駐車場情報センター60から抽出された自車位置周辺の駐車場情報を取得する。
【0035】
ステップ206において、ナビゲーション装置20は、車両情報DB72から、自車100の最小回転半径、全長L0、全幅W0、全高H、前方オーバーハング長L1、ホイールベースL2、後方オーバーハング長L3、ドア幅W1等の車両情報を読み出す。
ステップ208において、ナビゲーション装置20は、駐車場情報センター60から取得した各駐車場の入出口の高さおよび幅と自車100の全高Hおよび全幅W0とを比較し、自車100が進入できる駐車場を選択する。
【0036】
さらに、ステップ210においてナビゲーション装置20は、進入可能な駐車場の中で、自車位置から希望到達時間を満たす駐車場があるかを判定する。希望到達時間を満たす駐車場がない場合は、本処理を終了する。
希望駐車場が見つかった場合、ステップ212においてナビゲーション装置20は、各希望駐車場について、駐車場120の通路幅、駐車スペース124の駐車幅等から、駐車動作可能範囲122を算出する。
【0037】
ステップ214においてナビゲーション装置20は、車両情報DB72から読み出した自車100の車両情報から、自車100が旋回するときの旋回特性である外周軌跡110、内周軌跡112を算出する。
ステップ216においてナビゲーション装置20は、駐車場120の駐車動作可能範囲122と自車100の旋回特性とに基づいて駐車スペース124に自車100を移動するときの切り返し回数を算出し、切り返し回数に応じて前述した点数S1を設定する。
【0038】
ステップ218においてナビゲーション装置20は、駐車場の駐車幅と自車100の全幅W0とドア幅W1とから前述した点数S2を設定する。
ステップ220においてナビゲーション装置20は、S1、S2、(S1+S2)の点数に基づいて各駐車場に駐車難易度を設定し、ディスプレイ40等で駐車の容易な駐車場を案内する。
本実施形態では、このように、自車100の寸法データにより判定される駐車難易度と、自車100を駐車スペース124に移動する旋回特性により判定される駐車難易度とから、駐車難易度を総合的に判定し、駐車の容易な駐車場を案内できる。
【0039】
(他の実施形態)
以上説明した上記実施形態において説明した、自車100の寸法データ、ならびに駐車スペース124に自車100を移動するときの自車100の旋回特性を考慮した駐車難易度の判定は、平地駐車場、立体駐車場に限らずタワー式の駐車場にも適用できる。立体式の駐車場の場合は、通常各階における駐車場の構造は同じであるから、1階分の駐車場情報に基づいて駐車難易度を判定する。階によって駐車場の構造が異なる場合は、各階について駐車難易度を判定すればよい。また、タワー式駐車場においても、ターンテーブルに自車を移動する途中の通路の幅、角度等により自車を旋回させることがある。したがって、自車の旋回特性を考慮してタワー式の駐車場への駐車難易度を判定できる。
上記実施形態では、自車100の全幅W0とドア幅W1と駐車スペース124の駐車幅とから駐車後の乗降の難易度を駐車難易度に含めて駐車難易度を判定したが、乗降難易度を駐車難易度に含めずに駐車難易度を判定してもよい。
【0040】
また上記実施形態では、駐車場探索要求を受け取るステップ200において希望到達時間を入力し、ステップ210において、進入可能な駐車場の中で自車位置から希望到達時間を満たす駐車場があるかを判定し、希望駐車場が見つかった場合にその希望駐車場について駐車難易度を判定するようにした。これに対し、希望到達時間を入力せずに、駐車場の探索地域に存在する駐車場についてそれぞれ到達時間を求め、到達時間から新たに点数S3を設定するようにしてもよい。S3は例えば10点満点であり、点数が高いほど自車100の現在位置、もしくは目的地点から短い時間で到着できる駐車場であることを表している。そして、S3、(S1+S3)、(S2+S3)、(S1+S2+S3)に基づいて駐車難易度を設定するようにしてもよい。
【図面の簡単な説明】
【0041】
【図1】本実施形態によるハードウェアのブロック図。
【図2】本実施形態によるソフトウェアのブロック図。
【図3】(A)は自車の側面図、(B)は(A)のB方向矢視図。
【図4】自車の旋回軌跡を示す説明図。
【図5】駐車動作可能範囲を示す説明図。
【図6】駐車スペースに駐車した自車の状態を示す説明図。
【図7】(A)は、各駐車場の点数S1、S2、(S1+S2)を示す点数図、(B)は点数を総合的に判定した駐車難易度を示す説明図。
【図8】駐車場案内のフローチャート。
【符号の説明】
【0042】
20ナビゲーション装置、32:方位センサ(位置検出手段)、34:GPSユニット(位置検出手段)、36:車速センサ(位置検出手段)、40:ディスプレイ(駐車場案内手段)、42:スピーカ、50:CPU(駐車場情報取得手段、車両情報取得手段、旋回特性取得手段、駐車難易度判定手段、駐車場案内手段)、100:自車、102:ドア、110:外周軌跡(旋回特性)、112:内周軌跡(旋回特性)120:駐車場、124:駐車スペース、124:駐車動作可能範囲
【特許請求の範囲】
【請求項1】
自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、
前記自車の寸法データを車両情報として取得する車両情報取得手段と、
前記自車の旋回特性を取得する旋回特性取得手段と、
前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、
前記駐車難易度に基づき前記駐車場を案内する駐車場案内手段と、
を備えるナビゲーション装置。
【請求項2】
前記駐車場情報取得手段は前記駐車場の駐車幅を取得し、
前記車両情報取得手段は前記自車の全幅およびドア幅を取得し、
前記駐車難易度判定手段は、前記全幅と前記ドア幅と前記駐車幅とに基づいて駐車してからの乗降難易度を判定し、前記駐車難易度に前記乗降難易度を含める請求項1に記載のナビゲーション装置。
【請求項3】
前記旋回特性取得手段は、前記自車が旋回するときの内周軌跡および外周軌跡を前記旋回特性として取得する請求項1または2に記載のナビゲーション装置。
【請求項4】
前記旋回特性取得手段は、前記車両情報取得手段が取得する最小回転半径および前記寸法データから、前記内周軌跡および前記外周軌跡を規定する請求項3に記載のナビゲーション装置。
【請求項5】
前記駐車難易度判定手段は、前記駐車場の駐車スペースに前記自車が駐車するまでに必要な切り返し回数を前記旋回特性に基づいて算出し、前記切り返し回数に応じて前記駐車難易度を判定する請求項3または4に記載のナビゲーション装置。
【請求項6】
自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得段階と、
前記自車の寸法データを車両情報として取得する車両情報取得段階と、
前記自車の旋回特性を取得する旋回特性取得段階と、
前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定段階と、
前記駐車難易度に基づき前記駐車場を案内する駐車場案内段階と、
を含むナビゲーション方法。
【請求項1】
自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得手段と、
前記自車の寸法データを車両情報として取得する車両情報取得手段と、
前記自車の旋回特性を取得する旋回特性取得手段と、
前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定手段と、
前記駐車難易度に基づき前記駐車場を案内する駐車場案内手段と、
を備えるナビゲーション装置。
【請求項2】
前記駐車場情報取得手段は前記駐車場の駐車幅を取得し、
前記車両情報取得手段は前記自車の全幅およびドア幅を取得し、
前記駐車難易度判定手段は、前記全幅と前記ドア幅と前記駐車幅とに基づいて駐車してからの乗降難易度を判定し、前記駐車難易度に前記乗降難易度を含める請求項1に記載のナビゲーション装置。
【請求項3】
前記旋回特性取得手段は、前記自車が旋回するときの内周軌跡および外周軌跡を前記旋回特性として取得する請求項1または2に記載のナビゲーション装置。
【請求項4】
前記旋回特性取得手段は、前記車両情報取得手段が取得する最小回転半径および前記寸法データから、前記内周軌跡および前記外周軌跡を規定する請求項3に記載のナビゲーション装置。
【請求項5】
前記駐車難易度判定手段は、前記駐車場の駐車スペースに前記自車が駐車するまでに必要な切り返し回数を前記旋回特性に基づいて算出し、前記切り返し回数に応じて前記駐車難易度を判定する請求項3または4に記載のナビゲーション装置。
【請求項6】
自車が駐車を予定している地域の駐車場の車両移動可能範囲を取得する駐車場情報取得段階と、
前記自車の寸法データを車両情報として取得する車両情報取得段階と、
前記自車の旋回特性を取得する旋回特性取得段階と、
前記寸法データと前記旋回特性と前記車両移動可能範囲とに基づき前記駐車場に前記自車を駐車する駐車難易度を判定する駐車難易度判定段階と、
前記駐車難易度に基づき前記駐車場を案内する駐車場案内段階と、
を含むナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−10628(P2007−10628A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−195253(P2005−195253)
【出願日】平成17年7月4日(2005.7.4)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年7月4日(2005.7.4)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]