
ナビゲーション装置およびナビゲーション方法
【課題】ナビゲーション装置の利便性を損なうことなく、その消費電力を節減する。
【解決手段】ナビゲーション装置1の表示装置51は、所電力効果の大きい電子ペーパによって構成される。制御ユニット10は、誘導経路生成処理部11の処理として、地図データ記憶部41を参照して、出発地から目的地までの誘導経路から右左折が必要な交差点を誘導個所として抽出する。また、電力制御誘導処理部12として、自車がある誘導個所を通過したとき、その誘導個所から次の誘導個所までの誘導経路の地図を表示装置51に表示するとともに、自車が次の誘導個所に到達するまでの所要時間を算出し、その所要時間から所定の時間を差し引いた時間、位置検出ユニット20への電力供給を遮断する。また、誘導個所案内処理部13の処理として、自車と誘導個所までの距離が所定の距離以下になったとき、その誘導箇所の交差点の拡大地図を表示する。
【解決手段】ナビゲーション装置1の表示装置51は、所電力効果の大きい電子ペーパによって構成される。制御ユニット10は、誘導経路生成処理部11の処理として、地図データ記憶部41を参照して、出発地から目的地までの誘導経路から右左折が必要な交差点を誘導個所として抽出する。また、電力制御誘導処理部12として、自車がある誘導個所を通過したとき、その誘導個所から次の誘導個所までの誘導経路の地図を表示装置51に表示するとともに、自車が次の誘導個所に到達するまでの所要時間を算出し、その所要時間から所定の時間を差し引いた時間、位置検出ユニット20への電力供給を遮断する。また、誘導個所案内処理部13の処理として、自車と誘導個所までの距離が所定の距離以下になったとき、その誘導箇所の交差点の拡大地図を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、省電力を考慮したナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
現在、国内外において、GPS(Global Positioning System)などにより車両や歩行者の現在位置を検出し、その検出した現在位置から目的地までの適切な経路を探索したうえで、その探索した経路を表示装置に表示するとともに、交差点などでは、音声などを用いて進行方向などを誘導案内するナビゲーション装置の普及が進行している。
【0003】
また、近年は、地球温暖化という環境問題への取り組みのために、あらゆる工業製品において省エネルギーを図る努力がなされている。ナビゲーション装置は、車両に搭載されるにせよ、人に携帯されるにせよ、バッテリによって駆動されるものであるため、とくに消費電力を節減するという意味での省エネルギーの必要性が高い。
【0004】
例えば、特許文献1や特許文献2には、消費電力の節減を考慮した車両用のナビゲーション装置の例が開示されている。特許文献1や特許文献2では、車両のドライバが経路の表示や誘導案内を必要としない場合、例えば、しばらくの間は道なりに車両を走行させればいいような場合には、表示装置や音声出力装置への電力供給を遮断することによって、ナビゲーション装置の消費電力の低減を図るとしている。
【特許文献1】特開平9−5102号公報
【特許文献2】特開2002−257555号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に開示されたナビゲーション装置では、ドライバは、一定の間、道なりに運転さえすればよいとはいえ、その間、次の誘導表示が行われるまで、地図や経路が表示された表示画面までもオフされてしまう。つまり、ドライバは、その間、走行中の道路の名称や次の誘導個所の交差点の名称などを確認することができなくなる。これは、ドライバにとっての利便性が損なわれることを意味する。
【0006】
また、これらの従来技術においては、誘導経路からの逸脱を検知するために、GPS電波の受信機をはじめ、位置検出に関連するセンサやその駆動回路は動作するとしている。従って、その受信機、センサ、駆動回路などには、表示画面がオフされたときであっても電力が供給されている。もし、ドライバが道なりに運転さえすればよいのであれば、誘導経路からの逸脱することもないので、位置検出に関連する装置が動作する必要はない。つまり、従来技術では、消費電力の節減が十分に徹底されているとはいい難い。
【0007】
そこで、本発明においては、誘導経路などを表示することの利便性を損なうことなく、消費電力を節減することが可能なナビゲーション装置およびナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するために、本発明のナビゲーション装置では、まず、その表示装置として、電力供給を遮断しても表示内容がそのまま表示され続けるという性質を備えた電子ペーパを用いた。さらに、電子ペーパは、表示内容が静止しているときには、電力が消費されず、表示内容が変更されるときにだけ電力が消費されるという性質を備えている。
【0009】
そこで、本発明のナビゲーション装置では、このような電子ペーパの性質を考慮して、より大きな省電力効果を得るために、まず第1に、道なりにただ直進すればいいような交差点での誘導指示表示は行わず、右左折が必要な交差点(以下、誘導個所交差点という)でのみ右左折の誘導指示表示を行うようにした。このとき、表示装置には、ある誘導個所交差点(出発地を含む)から次の誘導個所交差点(目的地を含む)までの誘導経路を含む地図を表示し、自車位置も表示しないとする。すなわち、表示装置には、自車が複数の直進交差点を通過するときには、その間ずっと同じ地図が表示されることになる。
【0010】
第2に、本発明のナビゲーション装置では、ある誘導個所交差点(出発地を含む)を通過したとき、その誘導個所交差点(出発地を含む)から次の誘導個所交差点(目的地を含む)までの地図を表示装置に表示するとともに、自車が次の誘導個所交差点(目的地を含む)に到達するまでの所要時間を予測し、その所要時間から所定の時間を差し引いた時間を電力供給遮断時間として求め、その電力供給遮断時間の間、自車位置を検出するための位置検出装置などへの電力供給を遮断するようにした。
【0011】
本発明のナビゲーション装置では、表示装置として電子ペーパを用いているので、電力供給が遮断されたとしても、表示装置には次の誘導個所交差点(目的地を含む)までの誘導経路を含む地図が表示されたままの状態となるが、その誘導経路は道なりに単に直進すればよい誘導経路であるので、ドライバにとって大きな不便はない。
【0012】
また、本発明のナビゲーション装置では、直進交差点での誘導指示を省略し、右左折が必要な交差点(誘導個所交差点)でのみ誘導指示を行うので、電子ペーパに表示する表示内容の変更頻度が削減されることになり、その結果、電力消費が低減される。さらに、本発明のナビゲーション装置では、車両が直進交差点の誘導経路を走行中には、位置検出装置などへの電力供給をも遮断するようにしたので、より大きな消費電力の節減を達成することができる。
【発明の効果】
【0013】
本発明によれば、ナビゲーション装置の利便性を損なうことなく、その消費電力を節減することが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して本発明の実施形態について詳しく説明する。
【0015】
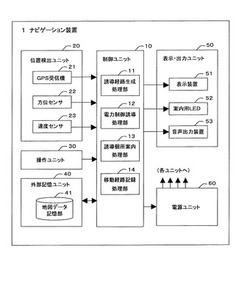
図1は、本発明の実施形態に係るナビゲーション装置のブロック構成の例を示した図である。図1に示すように、ナビゲーション装置1は、通常のコンピュータなどにより構成された制御ユニット10に、位置検出ユニット20、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50などが接続されて構成され、さらに、前記の各ユニット10〜50に電力を供給する電源ユニット60を含んで構成される。
【0016】
ここで、制御ユニット10は、機能的には、誘導経路生成処理部11、電力制御誘導処理部12、誘導個所案内処理部13、移動経路記録処理部14などの処理部を含んで構成される。また、ハードウエアとしての制御ユニット10は、集積回路などで構成された演算処理装置(CPU:Central Processing Unit)と、RAM(Random Access Memory)、ROM(Read Only Memory)などのメモリと、含んで構成される。なお、これらの処理部11〜14の機能については、別途、詳しく説明するが、その機能は、前記CPUが、RAM、ROMなどのメモリに格納された所定のプログラムを実行することによって実現される。
【0017】
位置検出ユニット20は、GPS受信機21、方位センサ22、速度センサ23などを含んで構成される。GPS受信機21は、複数のGPS衛星からの電波を受信し、その受信タイミングの差や、その電波に含まれる時刻情報などに基づき、そのGPS受信機21を搭載した車両の位置情報(緯度、経度のデータ)を取得する。
【0018】
また、方位センサ22は、ジャイロセンサやステアリング角度センサなどによって構成され、また、速度センサ23は、車輪の回転数センサや対地ドップラレーダなどによって構成される。これらのセンサ22,23から時々刻々得られる方位情報や速度情報は、GPS受信機21によって取得される位置情報を補正したり、GPS電波が届かないトンネル内やビルの谷間などで位置を検出したりするのに用いられる。なお、方位センサ22や速度センサ23は、必ずしもナビゲーション装置1の内部に含まれる必要はなく、その外部に設けられていても、方位情報や速度情報を制御ユニット10に入力可能なものであればどのような形態のものであってもよい。
【0019】
操作ユニット30は、表示装置51と一体となったタッチパネルスイッチ、表示装置51の外周部などに設けられたメカ式のボタンスイッチ、赤外線などによるリモコン装置、音声入力用のマイクロフォンなどによって構成され、ドライバが各種情報を制御ユニット10へ入力するのに使用される。
【0020】
外部記憶ユニット40は、フラッシュメモリが搭載されたメモリカード、ハードディスク、DVD(Digital Versatile Disk)などの記憶媒体およびその駆動装置によって構成され、道路ネットワークの地図データなどナビゲーションに必要な情報が記憶される。また、ドライバからの求めに応じて、車両の走行軌跡を表す経路情報などが記録される。本実施形態では、外部記憶ユニット40内に地図データを記憶した地図データ記憶部41が構成されているものとする。
【0021】
なお、外部記憶ユニット40は、ナビゲーション装置1の外にあるとし、例えば、携帯電話などの通信回線などを介して接続された地図情報センタや交通情報センタにあるとしてもよい。その場合には、制御ユニット10は、必要に応じて、地図データを地図情報センタや交通情報センタからダウンロードして用いる。また、制御ユニット10により取得された当該車両の走行軌跡を表した経路情報は、適宜、地図センタや交通情報センタなどにアップロードされる。
【0022】
表示・出力ユニット50は、表示装置51、案内用LED52、音声出力装置53を含んで構成される。
【0023】
表示装置51には、地図や誘導経路などが表示されるが、本実施形態では、その表示装置51としていわゆる電子ペーパを利用する。電子ペーパは、可撓性を有するフィルム上に、例えば、電気泳動方式のマイクロカプセルやコレステリック液晶を形成することによって実現され、電力の供給を遮断しても、それまでの表示が保持され続けるという性質を有する。
【0024】
そのため、電子ペーパには、その表示内容を書き換えるときのみに電力の供給をすればよく、従って、電子ペーパを用いた表示装置51では、その表示内容を頻繁に変えない場合には、大幅な省電力を図ることができる。このような電子ペーパの特性は、ナビゲーション装置1の表示装置51の省電力を図るうえに極めて都合のよい特性である。
【0025】
表示装置51の案内用LED52は、例えば、緑色と赤色などのように発光色が異なる2つのLED(Light Emitting Diode)によって構成され、後記するように、表示装置51に表示された経路情報などを補助する情報を表示するのに用いられる。また、音声出力装置53は、スピーカなどによって構成され、誘導個所において、制御ユニット10が、適宜、右左折などの誘導情報を音声で出力するのに用いられる。
【0026】
ナビゲーション装置1は、さらに、制御ユニット10、位置検出ユニット20、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50の各ユニットへ電力を供給する電源ユニット60を備えている。電源ユニット60からは各ユニット10〜50に到る電力供給線(図示省略)が設けられ、その電力供給線上には、制御ユニット10からの指示によってオン・オフ制御可能な電力遮断スイッチ(図示省略)が設けられている。なお、電力遮断スイッチを設ける単位は、ユニット10〜50単位ではなく、そのユニット内に含まれる装置やセンサ単位などであってもよい。
【0027】
制御ユニット10は、このような電力遮断スイッチを用いることにより、自身を除く各ユニット20〜50への電力供給を、適宜、オン・オフすることができる。なお、制御ユニット10の場合には、このような電力遮断スイッチは、制御ユニット10の内部に設けられており、制御ユニット10自身の節電動作モードとして、いわゆる、スタンバイモードや休止モードが実現されている。また、他のユニット20〜50についても、電力遮断スイッチがユニット20〜50に設けられているとしてもよい。
【0028】
続いて、図2〜図6を参照して、ナビゲーション装置1によって行われる経路誘導表示の方法およびそのときの節電動作について説明する。
【0029】
一般に、車両のドライバがナビゲーション装置1に求める最小不可欠情報といえば、現在走行中の道路の名称であり、次に右左折するべき交差点の名称である。直進したり、道なりに通過したりすればすむような交差点については、その誘導情報が表示されなかったとしても、ドライバは、とくに不便を感じることはない。ドライバは、走行中の道路の名称が分かっていれば、道路の案内標識などから得られる情報と照らし合わせて、自車が誘導経路に乗っているか否かを確認することができる。
【0030】
そこで、本実施形態では、ナビゲーション装置1は、出発地から目的地までの経路を求めたとき、車両が直進または道なりに走行すればいいような交差点では、誘導指示情報を表示せず、右左折などが必要な交差点でのみ誘導指示情報を表示するようにした。このようにすることによって、誘導指示情報を表示する必要がある交差点(以下、誘導個所交差点、または、単に、誘導個所という)の数は、大幅に削減されるとともに、隣接する誘導個所間の距離を長くすることができる。従って、本実施形態では、ナビゲーション装置1は、誘導指示情報の表示を頻繁に行う必要がなくなる。
【0031】
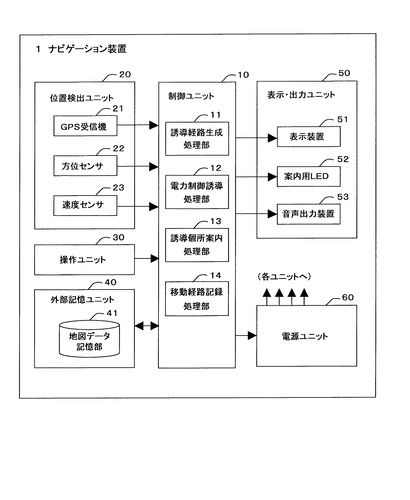
図2は、本実施形態のナビゲーション装置1において行われる経路誘導表示の考え方を説明するための図ある。図2において、2重丸印は出発地、十字星印は目的地を表し、それらをつなぐ折れ線の実線は誘導経路を表している。また、折れ線の折れ点部分の黒丸印は誘導個所、つまり、右左折などが必要な交差点を表している。なお、隣接する誘導個所をつなぐ誘導経路部分は、ここでは直線で表されているが、実際には、直線である必要はない。また、その誘導経路部分には、複数の交差点があってもよい。その場合、自車は、その交差点を直進または道なりに走行する。
【0032】
また、図2において、破線で囲まれた領域は、表示装置に表示される誘導経路および地図の領域を表している。すなわち、ナビゲーション装置1は、自車がある誘導経路を走行中の場合には、その走行中の誘導経路と、その誘導経路を含む地図と、を表示装置51に表示する。このとき、その誘導経路および地図の表示は、自車が次の誘導個所に接近するまでそのまま保持される。なお、その間、自車位置は刻々変わるが、その自車位置は、その表示された地図の中には表示されないものとする。
【0033】
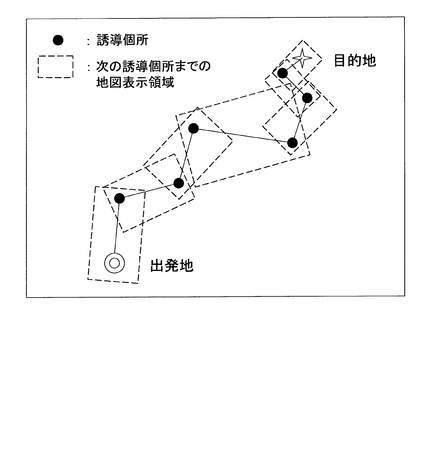
図3は、誘導経路および地図を表示装置51に表示した表示画面の例を示した図である。図3に示された表示画面70において、2重丸印は自車が前回通過した誘導個所、星印は次に通過予定の誘導個所を表し、その間をつなぐ矢印付の太い実線は誘導経路を表している。また、この表示画面70の右下部分には、当該誘導経路の道路名称、次の誘導個所の交差点の名称、その交差点への予想到着時刻などが表示される。さらに、その表示画面の左上部分には、地図の方位、縮尺、そのときの時刻などの情報が表示されるとともに、目的地の地名や目的地への予想到着時刻などが表示される。
【0034】
なお、ここでは、表示画面70に表示される地図の縮尺や方位の傾きは、当該誘導経路が画面いっぱいに表示されるように、制御ユニット10が、適宜、計算して決定するものとするが、ドライバの設定により、縮尺や方位の傾きを固定したり、設定したりできるようにしておいてもよい。
【0035】
ナビゲーション装置1は、表示画面70を、自車が出発点を出発するとき、あるいは、誘導個所の交差点を通過するとすぐに表示する。そして、マップマッチングなどにより、自車が所定の誘導経路に乗ったことを確認すると、表示装置51への電力供給を遮断する。前記したように、表示装置51は、電子ペーパにより構成されているので、そのとき表示装置51に表示されている内容は、その後も表示されたままとなる。
【0036】
すなわち、表示画面70には、自車が次の誘導個所に近付くまで同じ表示がされたままとなり、自車位置は表示されない。従って、ドライバは、その間、表示画面70に表示された誘導経路の地図しか見ることができないが、その表示画面70には、次の誘導個所の交差点の名称(図3では、「原宿」交差点)や走行中の誘導経路の道路名称(図3では、「国道1号(横浜方面)」)などが表示されているので、ドライバにとってとくに不都合となることはない。ドライバは、次の誘導個所までは、ひたすらに、自車を道なりに、また、交差点では直進して走行させればよい。
【0037】
なお、本実施形態では、ナビゲーション装置1は、表示装置51の電力供給を遮断するとき、GPS受信機21を含む位置検出ユニット20への電力供給も併せて遮断する。その場合、ナビゲーション装置1は、自車位置を検出することができなくなり、その結果、表示画面70にも自車位置を表示することができない。しかしながら、前記したように、ドライバにとっては、走行中の道路名称と左右折すべき次の交差点の名称が分かればよいのであって、自車位置が表示されないことによる不便はあまりない。
【0038】
一方、GPS受信機21を含む位置検出ユニット20への電力供給を遮断すれば、その分、ナビゲーション装置1の消費電力が削減されるので、表示装置51への電力供給の遮断と併せて、より大きな節電効果が得られる。
【0039】
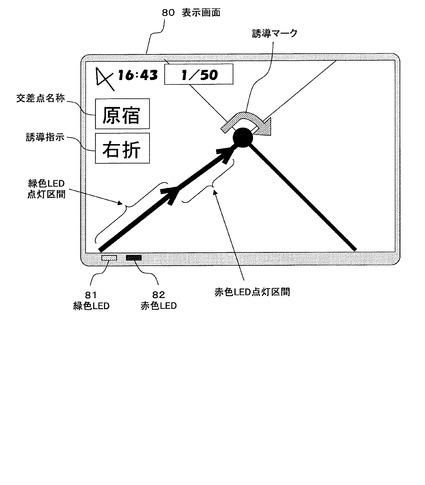
図4は、自車が誘導個所の交差点に接近したときに表示装置51に表示される誘導個所案内の表示画面の例を示した図である。図4に示すように、その表示画面80には、誘導個所の交差点近傍の地図が大きく表示され、その交差点の名称とその交差点での誘導指示情報が表示される。その誘導指示情報は、交差点位置に誘導マークとして右折または左折を示す矢印が表示されるほか、表示画面80の左端部に文字で「右折」、「左折」などと表示される。また、図示していないが、表示画面80には、「右折専用レーンあり」などの当該交差点についての詳細な情報を表示してもよい。
【0040】
ナビゲーション装置1は、このような表示画面80を、自車が次の誘導個所の交差点に所定の距離まで接近したとき、例えば、1km手前に到達したときに表示する。ところが、位置検出ユニット20への電力供給が遮断されている場合には、ナビゲーション装置1は、自車位置の検出、すなわち、表示画面80を表示すべきタイミングの検出を行うことができない。そこで、本実施形態では、ナビゲーション装置1は、次の誘導個所交差点への到達所要時間を予測して、その予測した到達所要時間に基づき、早めに位置検出ユニット20への電力供給を再開する。そして、その位置検出ユニット20によって検出される自車位置に基づき、自車が表示画面80を表示するタイミングを検出する。
【0041】
また、図4に示すように、表示装置51の表示画面80の外の左下部分には、緑色LED81および赤色LED82が設けられている。緑色LED81および赤色LED82は、自車位置が次の誘導個所の交差点へどの程度接近しているかを示すために用いられる。例えば、次の誘導個所交差点までの距離が、1km以内になったときには、緑色LED81が点灯され、また、200m以内になったときには、赤色LED82が点灯される。
【0042】
なお、表示画面80を表示する時点では、位置検出ユニット20への電力供給が再開されているので、自車位置を表示画面80の中に表示することも可能であるが、その場合には、一部であるにせよ表示画面80の表示が頻繁に変更されることになる。そこで、ここでは、その表示変更時の消費電力を節減するために、自車位置を表示画面80の中に表示せず、およその自車位置を緑色LED81および赤色LED82により示すようにしたものである。
【0043】
また、本実施形態では、およその自車位置を表すのに2つのLED用いているが、およその自車位置を表す方法は、これに限定されることはない。例えば、赤色LED82のみを用い、次の誘導個所交差点までの距離が、例えば、1km以内になったときには、赤色LED82が点灯し、また、200m以内になったときには、赤色LED82を点滅させるようにしてもよい。
【0044】
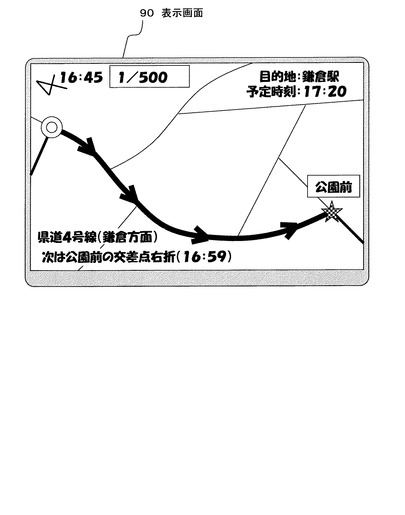
図5は、自車が誘導個所の交差点を通過後に表示装置51に表示される表示画面の例を示した図である。自車が誘導個所の交差点を通過すると、ナビゲーション装置1は、表示画面70(図3参照)と同様の表示画面90を表示する。従って、表示画面90と表示画面70とは、誘導経路およびその誘導経路を含む地図のデータが異なるだけで表示される項目は同じである。
【0045】
なお、図3〜図5に表示されている地名、交差点名称、道路名称などや地図の形状は、一部に現実に存在するものが含まれているが、現実を忠実に表したものではなく、単に、例として示した架空のものである。
【0046】
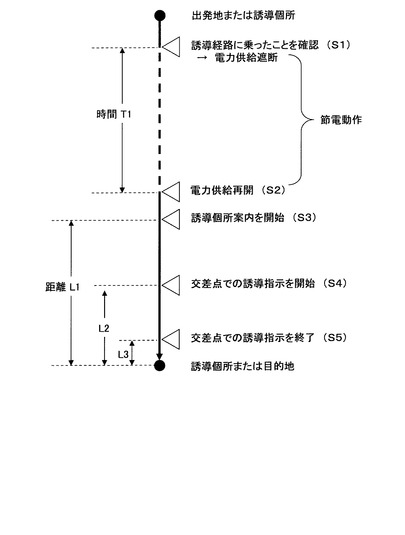
図6は、節電動作の切替えおよび経路誘導表示の切替えのタイミングの例を示した図である。図6に示すように、ナビゲーション装置1は、自車が出発地を出発、または、誘導個所の交差点を通過すると、例えば、表示画面70(図3参照)のような表示画面を表示装置51に表示する。その後、引き続いて、自車が所定の誘導経路に乗ったことを確認すると(ステップS1)、ナビゲーション装置1は、表示装置51および位置検出ユニット20への電力供給を遮断する。
【0047】
このとき、ナビゲーション装置1は、自車が次の誘導個所の交差点に到達するまでの所要時間を予測し、その所要時間から所定の時間、例えば、2分程度を差し引いた時間を時間T1とする。そして、時間T1の間、表示装置51および位置検出ユニット20への電力供給を遮断したままとし、電力供給遮断後、時間T1が経過した後、表示装置51および位置検出ユニット20への電力供給を再開する(ステップS2)。
【0048】
このステップS1〜ステップS2の間は、ナビゲーション装置1の節電動作の期間であり、表示装置51の表示機能および位置検出ユニット20の位置検出機能は停止する。ただし、表示装置51が電子ペーパであるので、先に表示された表示画面70のような表示画面は、表示されたままの状態になるので、前記したようにドライバにとって不都合はない。
【0049】
なお、この間、制御ユニット10がとくに実行すべき処理が他にない場合には、制御ユニット10自身もスタンバイモードまたは休止モードに遷移して、節電に寄与させるようにしてもよい。この場合には、当然ながら、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50の電力供給も遮断することができる。
【0050】
また、表示装置51として電子ペーパを用いた場合には、その大部分の電力は、表示画面の表示内容が書き換えられたときにのみ消費される。このことを考慮すれば、ステップS1〜ステップS2の節電動作の間であっても、表示装置51については電力供給を遮断しないとしてもよい。電子ペーパの場合には、頻繁に表示内容を変更しない限りは、電力供給の遮断制御をとくにしなくても、十分な節電効果を得ることができる。
【0051】
位置検出ユニット20への電力供給が再開されると、位置検出ユニット20により自車位置の検出が可能となるので、ナビゲーション装置1は、自車位置を検知し、その検出した自車位置から次の誘導個所交差点までの距離があらかじめ定められた距離L1(例えば、1km)以下になった場合には、次の誘導個所交差点を拡大して表示した、例えば、表示画面80を表示して、誘導個所案内を開始する(ステップS3)。また、このとき、緑色LED81を点灯するとともに、「あと1000mで○○交差点です。右折する準備を始めて下さい。」といった音声メッセージを出力する。
【0052】
また、自車位置から次の誘導個所交差点までの距離があらかじめ定められた誘導指示開始の距離L2(例えば、200m)以下になった場合には、ナビゲーション装置1は、赤色LED82を点灯し、例えば、「次の交差点を右折して下さい。」といった音声メッセージを出力するなど、交差点での具体的な誘導指示を開始する(ステップS4)。
【0053】
また、自車位置から次の誘導個所交差点までの距離があらかじめ定められた誘導指示終了の距離L3(例えば、10m)以下になった場合には、ナビゲーション装置1は、交差点での誘導指示を終了する(ステップS5)。そして、例えば、方位センサ22などからの出力を得て、自車の右折または左折などを確認すると、さらに、次の誘導交差点までの新たな表示画面90(図5参照)を表示する。
【0054】
続いて、図7〜図9を参照して、以上に説明したナビゲーション装置1における省電力を考慮した経路誘導機能を実現するための処理フローについて説明する。ここで、図7は、誘導経路生成処理の処理フローの例を示した図、図8は、電力制御誘導処理の処理フローの例を示した図、図9は、誘導個所案内処理の処理フローの例を示した図である。
【0055】
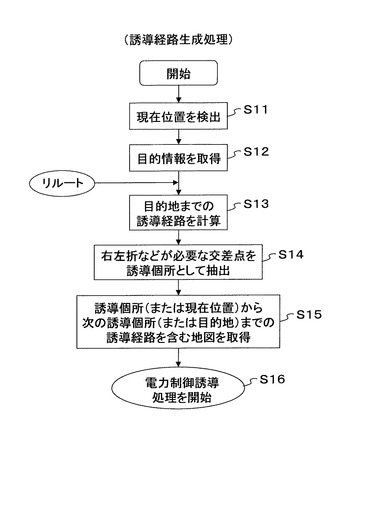
図7に示す誘導経路生成処理は、誘導経路生成処理部11(図1参照)の機能を実現するための処理であり、ナビゲーション装置1に電力が投入され、車両の走行が開始されるとき、あるいは、車両のドライバが目的地を設定し直すとき、制御ユニット10の演算処理装置(以下、CPUという)によって実行される。
【0056】
CPUは、まず、位置検出ユニット20から得られる位置データ(GPS受信機21によって得られる現在位置の緯度・経度のデータやそれを補正するために必要な方位センサ22、速度センサ23などから得られるデータ)に、マップマッチングなどの処理を施すことによって、自車の現在位置を検出する(ステップS11)。次に、CPUは、ドライバが操作ユニット30を介して設定する目的情報を取得する(ステップS12)。
【0057】
次に、CPUは、地図データ記憶部41などを参照して、目的地までの誘導経路を計算する(ステップS13)。このとき、CPUは、最短時間経路や最短距離経路などあらかじめドライバによって指定された誘導経路を計算する。そして、CPUは、その計算により得られた誘導経路に含まれる各交差点の状況を解析して、右左折などが必要な交差点を誘導個所として抽出する(ステップS14)。
【0058】
次に、CPUは、地図データ記憶部41を参照して、ある誘導個所(または現在位置)から次の誘導個所(または目的地)までの誘導経路を含む地図を取得する(ステップS15)。なお、ここでいう誘導経路を含む地図とは、図2において破線で示した各領域の地図をいう。CPUは、以上の処理を終了すると、図8に示す電力制御誘導処理を開始する(ステップS16)。
【0059】
なお、長距離を走行する場合には、誘導個所と誘導個所との間が長くなることがあり得るが、そのときには、直進するだけの交差点であっても、適宜、誘導個所としてもよい。すなわち、CPUは、ステップS14の処理において、隣接する2つの誘導個所間の距離が、例えば、20kmを超えるような場合には、その途中に存在する直進交差点を、適宜、選択して誘導個所とし、誘導個所間の距離が20km以下になるように調整する。
【0060】
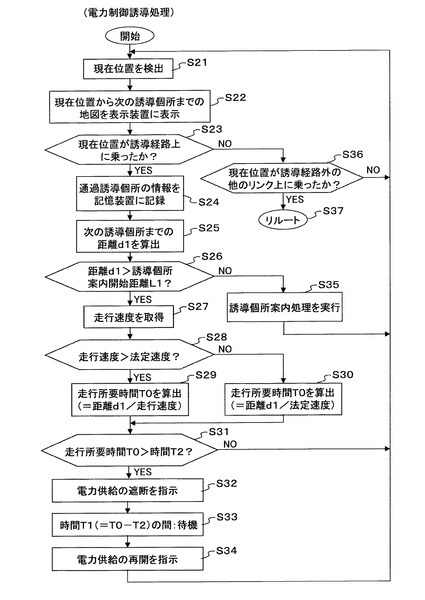
図8に示す電力制御誘導処理は、電力制御誘導処理部12の機能を実現するための処理であり、制御ユニット10のCPUによって実行される。
【0061】
CPUは、まず、位置検出ユニット20から得られる位置データに、マップマッチングなどの処理を施すことによって、自車の現在位置を検出し(ステップS21)、その現在位置から次の誘導個所までの地図を表示装置51に表示する(ステップS22)。なお、この地図は、先に、誘導経路生成処理(図7参照)のステップS15で取得した地図の1つである。
【0062】
次に、CPUは、自車の現在位置が、先に計算して求めた誘導経路上に乗っているか否かを判定する(ステップS23)。その判定の結果、自車の現在位置が誘導経路上に乗っている場合には(ステップS23でYES)、そのとき通過した誘導個所の情報を記憶装置に記録する(ステップS24)。なお、ここでいう通過した誘導個所とは、出発地も含むとする。また、誘導個所の情報とは、その誘導個所交差点の識別番号、交差点名などであってもよく、また、前記検出した現在位置の緯度・経度などであってもよい。なお、このステップS24の処理は、移動経路記録処理部14の処理に対応する。
【0063】
次に、CPUは、地図データ記憶部41を参照して、現在位置から次の誘導個所までの距離d1を算出する(ステップS25)。なお、地図データ記憶部41には、各交差点間をつなぐ道路をリンクとしたき、そのリンク長がリンクの識別番号に対応付けられて記憶されており、また、誘導経路は、複数のリンクの識別番号の列から構成されるので、距離d1を算出するのは容易である。
【0064】
次に、CPUは、距離d1をあらかじめ定められた誘導個所案内開始距離L1と比較し(ステップS26)、距離d1が誘導個所案内開始距離L1より長い場合には(ステップS26でYES)、位置検出ユニット20の速度センサ23から自車の走行速度を取得する(ステップS27)。なお、誘導個所案内開始距離L1は、図6における距離L1と同じものである。
【0065】
次に、CPUは、前記取得した走行速度を走行中リンクの法定速度と比較し(ステップS28)、走行速度が法定速度より大きい場合には(ステップS28でYES)、次の誘導個所に到達するのに必要な走行所要時間T0を、T0=距離d1/走行速度の式により算出し(ステップS29)、また、前記取得した走行速度が法定速度以下である場合には(ステップS28でNO)、走行所要時間T0を、T0=距離d1/法定速度の式により算出する(ステップS30)。
【0066】
なお、ステップS27〜ステップS30の処理は、次の誘導個所に到達するのに必要な走行所要時間T0を予測する処理である。ここでは、その走行所要時間T0を、次の誘導個所までの距離d1と自車の走行速度または法定速度とに基づき算出しているが、その算出方法は、自車が次の誘導個所に到達する最後のリンクまたは最後に近いリンクを走行している場合に適した算出方法である。
【0067】
これに対し、次の誘導個所までに複数の(多数の)リンクからなる誘導経路を走行する必要がある場合には、例えば、地図データ記憶部41に記憶されている各リンクのリンク旅行時間に基づき、次の誘導個所までの走行所要時間T0を求めるほうが合理的である。すなわち、地図データ記憶部41には、各リンクの旅行時間がリンクの識別番号に対応付けられて記憶されているので、CPUは、次の誘導個所までの誘導経路を構成するリンクの識別番号の列に基づき、次の誘導個所までの総旅行時間、つまり、走行所要時間を容易に算出することができる。
【0068】
そこで、走行所要時間T0を予測する処理は、ステップS27〜ステップS30の処理に限定されず、次の誘導個所に到達するまでに走行するリンク数に応じて、その予測の方法を切替えるようにしてもよい。
【0069】
次に、CPUは、前記算出した走行所要時間T0を所定の時間T2と比較し(ステップS31)、走行所要時間T0が所定の時間T2より大きい場合には(ステップS31でYES)、電源ユニット60に対し、位置検出ユニット20や表示・出力ユニット50などへの電力供給の遮断を指示する(ステップS32)。また、CPUは、T1=T0−T2の式によって得られる時間T1の間、待機し(ステップS33)、その時間T1が経過すると、電源ユニット60に対し、位置検出ユニット20や表示・出力ユニット50などへの電力供給の再開を指示し(ステップS34)、再度、ステップS21以下の処理を実行する。
【0070】
なお、ここでいう所定の時間T2は、CPUが、図4に示した表示画面80のような表示を行い、誘導個所交差点での誘導指示を行うのに必要な時間である。図6の説明では、時間T2をあらかじめ定められた値であるとし、その値は、例えば、2分であるとしている。ただし、時間T2は、必ずしも固定値である必要はなく、自車の走行速度や法定速度、あるいは、次に誘導個所までの距離d1などに依存する値であってもよい。
【0071】
また、ステップS33のCPUが待機している間には、CPUは、経路誘導に関係のない他の処理を実行してもよく、また、制御ユニット10に対する電力供給を遮断して、いわゆるスタンバイモードや休止モードに遷移してもよい。なお、よく知られているように、制御ユニット10の一部(ウォッチドッグタイマや一部のメモリ)には、スタンバイモードや休止モードであっても電力が供給される。
【0072】
再び、図8の説明に戻る。ステップS31の比較において、次の誘導個所までの走行所要時間T0が所定の時間T2以下である場合には(ステップS31でNo)、節電動作をする時間的余裕がないことを意味するので、CPUは、電力供給を遮断することなく、再度、ステップS21以下の処理を実行する。
【0073】
また、ステップS26の比較において、次の誘導個所までの距離d1が距離L1以下である場合には(ステップS26でNo)、CPUは、図9に示す誘導個所案内処理を実行し(ステップS35)、その実行を終了すると、再度、ステップS21以下の処理を実行する。
【0074】
また、ステップS23の判定で、自車の現在位置が誘導経路上に乗っていない場合には(ステップS23でNo)、CPUは、その現在位置が誘導経路外の他のリンク上に乗っているか否かを判定する(ステップS36)。その判定の結果、現在位置が誘導経路外の他のリンク上に乗っている場合には(ステップS36でYES)、CPUは、自車が誘導経路から逸脱したと判定し、リルートを行う(ステップS37)。なお、リルートを行うには、図7に示した誘導経路生成処理に戻って、ステップS13からの処理を再度実行すればよい。
【0075】
また、ステップS36の判定で、自車の現在位置が誘導経路外の他のリンク上にも乗っていない場合には(ステップS36でNO)、CPUは、自車が走行中のリンクを判定できないとして、再度ステップS21からの処理を実行する。なお、CPUが自車走行中のリンクを見失うことは、2つのリンクのなす角度が小さい場合、その交差点近傍で、しばしば発生する状況である。
【0076】
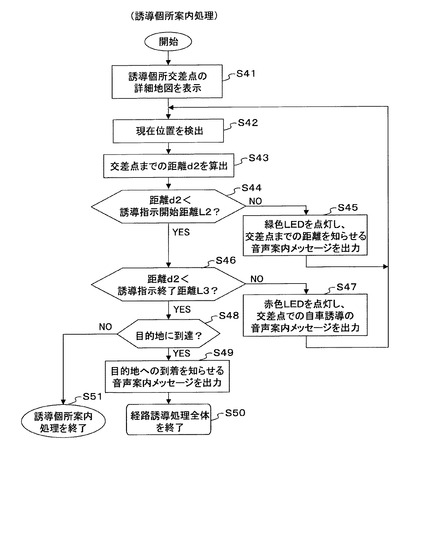
続いて、図9に示す誘導個所案内処理は、誘導個所案内処理部13(図1参照)の機能を実現するための処理であり、制御ユニット10のCPUによって実行され、その処理は、自車位置と次の誘導個所の交差点までの距離d1があらかじめ定められた誘導個所案内開始距離L1(例えば、1km)より小さくなったとき開始される。
【0077】
CPUは、まず、表示画面80(図4参照)のような誘導個所交差点の詳細地図を表示装置51に表示する(ステップS41)。次に、CPUは、位置検出ユニット20から得られる位置データに、マップマッチングなどの処理を施すことによって、自車の現在位置を検出し(ステップS42)、誘導個所となる交差点までの距離d2を算出する(ステップS43)。そして、その距離d2をあらかじめ定められた誘導処理開始距離L2(例えば、200m)と比較する(ステップS44)。
【0078】
その比較の結果、距離d2が誘導処理開始距離L2以上である場合には(ステップS44でNo)、CPUは、緑色LED81(図4参照)を点灯し、音声出力装置53を介して、交差点までの距離を知らせる音声案内メッセージを出力する(ステップS45)。これにより、ドライバは、右左折が必要な誘導個所の交差点に近付いたことを知ることができる。
【0079】
一方、距離d2が誘導処理開始距離L2より小さい場合には(ステップS44でYES)、CPUは、距離d2を、さらに、あらかじめ定められた誘導処理終了距離L3(例えば、10m)と比較する(ステップS46)。その比較の結果、距離d2が誘導処理終了距離L3以上である場合には(ステップS46でNo)、CPUは、赤色LED82(図4参照)を点灯し、音声出力装置53を介して、当該交差点での自車誘導の音声案内メッセージを出力する(ステップS47)。これにより、ドライバは、目前の交差点で右折または左折すべき方向を確認することができる。
【0080】
CPUは、音声メッセージを出力するステップS45またはステップS47の処理を実行したときには、その後、ステップS42へ戻り、ステップS42以下の処理を繰り返して実行する。なお、その繰り返しの処理により、ステップS45またはステップS47の音声メッセージ出力を繰り返し行うことになった場合には、2回目以降の音声出力は省略してもよい。
【0081】
また、ステップS46の比較で、距離d2が誘導処理終了距離L3より小さい場合には(ステップS46でYES)、CPUは、自車が目的地に到着したか否かを判定する(ステップS48)。その判定の結果、自車が目的地に到着していない場合には(ステップS48でNO)、図9の誘導個所案内処理を終了する(ステップS51)。なお、この誘導個所案内処理の終了は、図8のステップS35の誘導個所案内処理の終了に対応する。
【0082】
また、ステップS48の判定で、自車が目的地に到着した場合には(ステップS48でYES)、CPUは、音声出力装置53を介して、目的地への到着を知らせる音声案内メッセージを出力し(ステップS49)、当該目的地までの経路誘導処理全体を終了する(ステップS50)。
【0083】
なお、目的地への到着判定は、次の誘導個所が目的地であるか否かを判定することによって行うことができるので、距離d2が誘導処理終了距離L3より小さくなる前にも行うことができる。例えば、ステップS47を実行する前に目的地への到着を判定し、次の誘導個所が目的地であった場合には、ステップS49で出力する音声案内メッセージを、ステップS47の時点で出力してもよい。
【0084】
以上、本実施形態によれば、制御ユニット10は、出発地から目的地までの誘導経路を求めたとき、その誘導経路に含まれる交差点の中から右左折が必要な交差点を誘導個所として抽出し、自車がある誘導個所(出発点を含む)を通過したときには、その誘導個所から次の誘導個所までの誘導経路を含む地図を表示装置51に表示するとともに、次の誘導個所に到る走行所要時間(T0)を予測し、その後、引き続いて、予測した走行所要時間(T0)から所定の時間(T2)を差し引いた時間(T1=T0−T2)の間、位置検出ユニット20などへの電力供給の遮断を電源ユニット60へ指示する。
【0085】
そして、制御ユニット10は、交差点ごとでの誘導指示表示を省略し、誘導個所交差点でのみ誘導指示表示を行うようにしている。従って、表示装置51に対する表示内容の変更頻度は、大幅に削減される。
【0086】
従って、本実施形態では、表示装置51として電子ペーパを用いたことによる省電力効果のほかにも、電子ペーパに表示する表示頻度が削減された効果による省電力効果を期待することができる。さらには、表示装置51や位置検出ユニット20などへの電力供給を、時間T1の間、遮断することによる消費電力低減効果もあるので、従来技術に比べ、より大きな省電力効果を期待することができる。
【0087】
一方、表示装置51への電力供給が遮断されたとしても、表示装置51には、次の誘導個所までの誘導経路は表示され続けるので、ドライバにとっての利便性はほとんど低下しない。また、直進交差点での誘導指示表示が行われなかったとしても、ドライバにとっての利便性は低下しない。
【図面の簡単な説明】
【0088】
【図1】本発明の実施形態に係るナビゲーション装置のブロック構成の例を示した図。
【図2】本発明の実施形態に係るナビゲーション装置において行われる経路誘導表示の考え方を説明するための図。
【図3】誘導経路および地図を表示装置に表示した表示画面の例を示した図。
【図4】自車が誘導個所の交差点に接近したときに表示装置に表示される誘導個所案内の表示画面の例を示した図。
【図5】自車が誘導個所の交差点を通過後に表示装置に表示される表示画面の例を示した図。
【図6】節電動作の切替えおよび経路誘導表示の切替えのタイミングの例を示した図。
【図7】誘導経路生成処理の処理フローの例を示した図。
【図8】電力制御誘導処理の処理フローの例を示した図。
【図9】誘導個所案内処理の処理フローの例を示した図。
【符号の説明】
【0089】
1 ナビゲーション装置
10 制御ユニット
11 誘導経路生成処理部
12 電力制御誘導処理部
13 誘導個所案内処理部
14 移動経路記録処理部
20 位置検出ユニット
21 GPS受信機
22 方位センサ
23 速度センサ
30 操作ユニット
40 外部記憶ユニット
41 地図データ記憶部
50 表示・出力ユニット
51 表示装置
52 案内用LED
53 音声出力装置
60 電源ユニット
【技術分野】
【0001】
本発明は、省電力を考慮したナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
現在、国内外において、GPS(Global Positioning System)などにより車両や歩行者の現在位置を検出し、その検出した現在位置から目的地までの適切な経路を探索したうえで、その探索した経路を表示装置に表示するとともに、交差点などでは、音声などを用いて進行方向などを誘導案内するナビゲーション装置の普及が進行している。
【0003】
また、近年は、地球温暖化という環境問題への取り組みのために、あらゆる工業製品において省エネルギーを図る努力がなされている。ナビゲーション装置は、車両に搭載されるにせよ、人に携帯されるにせよ、バッテリによって駆動されるものであるため、とくに消費電力を節減するという意味での省エネルギーの必要性が高い。
【0004】
例えば、特許文献1や特許文献2には、消費電力の節減を考慮した車両用のナビゲーション装置の例が開示されている。特許文献1や特許文献2では、車両のドライバが経路の表示や誘導案内を必要としない場合、例えば、しばらくの間は道なりに車両を走行させればいいような場合には、表示装置や音声出力装置への電力供給を遮断することによって、ナビゲーション装置の消費電力の低減を図るとしている。
【特許文献1】特開平9−5102号公報
【特許文献2】特開2002−257555号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に開示されたナビゲーション装置では、ドライバは、一定の間、道なりに運転さえすればよいとはいえ、その間、次の誘導表示が行われるまで、地図や経路が表示された表示画面までもオフされてしまう。つまり、ドライバは、その間、走行中の道路の名称や次の誘導個所の交差点の名称などを確認することができなくなる。これは、ドライバにとっての利便性が損なわれることを意味する。
【0006】
また、これらの従来技術においては、誘導経路からの逸脱を検知するために、GPS電波の受信機をはじめ、位置検出に関連するセンサやその駆動回路は動作するとしている。従って、その受信機、センサ、駆動回路などには、表示画面がオフされたときであっても電力が供給されている。もし、ドライバが道なりに運転さえすればよいのであれば、誘導経路からの逸脱することもないので、位置検出に関連する装置が動作する必要はない。つまり、従来技術では、消費電力の節減が十分に徹底されているとはいい難い。
【0007】
そこで、本発明においては、誘導経路などを表示することの利便性を損なうことなく、消費電力を節減することが可能なナビゲーション装置およびナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するために、本発明のナビゲーション装置では、まず、その表示装置として、電力供給を遮断しても表示内容がそのまま表示され続けるという性質を備えた電子ペーパを用いた。さらに、電子ペーパは、表示内容が静止しているときには、電力が消費されず、表示内容が変更されるときにだけ電力が消費されるという性質を備えている。
【0009】
そこで、本発明のナビゲーション装置では、このような電子ペーパの性質を考慮して、より大きな省電力効果を得るために、まず第1に、道なりにただ直進すればいいような交差点での誘導指示表示は行わず、右左折が必要な交差点(以下、誘導個所交差点という)でのみ右左折の誘導指示表示を行うようにした。このとき、表示装置には、ある誘導個所交差点(出発地を含む)から次の誘導個所交差点(目的地を含む)までの誘導経路を含む地図を表示し、自車位置も表示しないとする。すなわち、表示装置には、自車が複数の直進交差点を通過するときには、その間ずっと同じ地図が表示されることになる。
【0010】
第2に、本発明のナビゲーション装置では、ある誘導個所交差点(出発地を含む)を通過したとき、その誘導個所交差点(出発地を含む)から次の誘導個所交差点(目的地を含む)までの地図を表示装置に表示するとともに、自車が次の誘導個所交差点(目的地を含む)に到達するまでの所要時間を予測し、その所要時間から所定の時間を差し引いた時間を電力供給遮断時間として求め、その電力供給遮断時間の間、自車位置を検出するための位置検出装置などへの電力供給を遮断するようにした。
【0011】
本発明のナビゲーション装置では、表示装置として電子ペーパを用いているので、電力供給が遮断されたとしても、表示装置には次の誘導個所交差点(目的地を含む)までの誘導経路を含む地図が表示されたままの状態となるが、その誘導経路は道なりに単に直進すればよい誘導経路であるので、ドライバにとって大きな不便はない。
【0012】
また、本発明のナビゲーション装置では、直進交差点での誘導指示を省略し、右左折が必要な交差点(誘導個所交差点)でのみ誘導指示を行うので、電子ペーパに表示する表示内容の変更頻度が削減されることになり、その結果、電力消費が低減される。さらに、本発明のナビゲーション装置では、車両が直進交差点の誘導経路を走行中には、位置検出装置などへの電力供給をも遮断するようにしたので、より大きな消費電力の節減を達成することができる。
【発明の効果】
【0013】
本発明によれば、ナビゲーション装置の利便性を損なうことなく、その消費電力を節減することが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して本発明の実施形態について詳しく説明する。
【0015】
図1は、本発明の実施形態に係るナビゲーション装置のブロック構成の例を示した図である。図1に示すように、ナビゲーション装置1は、通常のコンピュータなどにより構成された制御ユニット10に、位置検出ユニット20、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50などが接続されて構成され、さらに、前記の各ユニット10〜50に電力を供給する電源ユニット60を含んで構成される。
【0016】
ここで、制御ユニット10は、機能的には、誘導経路生成処理部11、電力制御誘導処理部12、誘導個所案内処理部13、移動経路記録処理部14などの処理部を含んで構成される。また、ハードウエアとしての制御ユニット10は、集積回路などで構成された演算処理装置(CPU:Central Processing Unit)と、RAM(Random Access Memory)、ROM(Read Only Memory)などのメモリと、含んで構成される。なお、これらの処理部11〜14の機能については、別途、詳しく説明するが、その機能は、前記CPUが、RAM、ROMなどのメモリに格納された所定のプログラムを実行することによって実現される。
【0017】
位置検出ユニット20は、GPS受信機21、方位センサ22、速度センサ23などを含んで構成される。GPS受信機21は、複数のGPS衛星からの電波を受信し、その受信タイミングの差や、その電波に含まれる時刻情報などに基づき、そのGPS受信機21を搭載した車両の位置情報(緯度、経度のデータ)を取得する。
【0018】
また、方位センサ22は、ジャイロセンサやステアリング角度センサなどによって構成され、また、速度センサ23は、車輪の回転数センサや対地ドップラレーダなどによって構成される。これらのセンサ22,23から時々刻々得られる方位情報や速度情報は、GPS受信機21によって取得される位置情報を補正したり、GPS電波が届かないトンネル内やビルの谷間などで位置を検出したりするのに用いられる。なお、方位センサ22や速度センサ23は、必ずしもナビゲーション装置1の内部に含まれる必要はなく、その外部に設けられていても、方位情報や速度情報を制御ユニット10に入力可能なものであればどのような形態のものであってもよい。
【0019】
操作ユニット30は、表示装置51と一体となったタッチパネルスイッチ、表示装置51の外周部などに設けられたメカ式のボタンスイッチ、赤外線などによるリモコン装置、音声入力用のマイクロフォンなどによって構成され、ドライバが各種情報を制御ユニット10へ入力するのに使用される。
【0020】
外部記憶ユニット40は、フラッシュメモリが搭載されたメモリカード、ハードディスク、DVD(Digital Versatile Disk)などの記憶媒体およびその駆動装置によって構成され、道路ネットワークの地図データなどナビゲーションに必要な情報が記憶される。また、ドライバからの求めに応じて、車両の走行軌跡を表す経路情報などが記録される。本実施形態では、外部記憶ユニット40内に地図データを記憶した地図データ記憶部41が構成されているものとする。
【0021】
なお、外部記憶ユニット40は、ナビゲーション装置1の外にあるとし、例えば、携帯電話などの通信回線などを介して接続された地図情報センタや交通情報センタにあるとしてもよい。その場合には、制御ユニット10は、必要に応じて、地図データを地図情報センタや交通情報センタからダウンロードして用いる。また、制御ユニット10により取得された当該車両の走行軌跡を表した経路情報は、適宜、地図センタや交通情報センタなどにアップロードされる。
【0022】
表示・出力ユニット50は、表示装置51、案内用LED52、音声出力装置53を含んで構成される。
【0023】
表示装置51には、地図や誘導経路などが表示されるが、本実施形態では、その表示装置51としていわゆる電子ペーパを利用する。電子ペーパは、可撓性を有するフィルム上に、例えば、電気泳動方式のマイクロカプセルやコレステリック液晶を形成することによって実現され、電力の供給を遮断しても、それまでの表示が保持され続けるという性質を有する。
【0024】
そのため、電子ペーパには、その表示内容を書き換えるときのみに電力の供給をすればよく、従って、電子ペーパを用いた表示装置51では、その表示内容を頻繁に変えない場合には、大幅な省電力を図ることができる。このような電子ペーパの特性は、ナビゲーション装置1の表示装置51の省電力を図るうえに極めて都合のよい特性である。
【0025】
表示装置51の案内用LED52は、例えば、緑色と赤色などのように発光色が異なる2つのLED(Light Emitting Diode)によって構成され、後記するように、表示装置51に表示された経路情報などを補助する情報を表示するのに用いられる。また、音声出力装置53は、スピーカなどによって構成され、誘導個所において、制御ユニット10が、適宜、右左折などの誘導情報を音声で出力するのに用いられる。
【0026】
ナビゲーション装置1は、さらに、制御ユニット10、位置検出ユニット20、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50の各ユニットへ電力を供給する電源ユニット60を備えている。電源ユニット60からは各ユニット10〜50に到る電力供給線(図示省略)が設けられ、その電力供給線上には、制御ユニット10からの指示によってオン・オフ制御可能な電力遮断スイッチ(図示省略)が設けられている。なお、電力遮断スイッチを設ける単位は、ユニット10〜50単位ではなく、そのユニット内に含まれる装置やセンサ単位などであってもよい。
【0027】
制御ユニット10は、このような電力遮断スイッチを用いることにより、自身を除く各ユニット20〜50への電力供給を、適宜、オン・オフすることができる。なお、制御ユニット10の場合には、このような電力遮断スイッチは、制御ユニット10の内部に設けられており、制御ユニット10自身の節電動作モードとして、いわゆる、スタンバイモードや休止モードが実現されている。また、他のユニット20〜50についても、電力遮断スイッチがユニット20〜50に設けられているとしてもよい。
【0028】
続いて、図2〜図6を参照して、ナビゲーション装置1によって行われる経路誘導表示の方法およびそのときの節電動作について説明する。
【0029】
一般に、車両のドライバがナビゲーション装置1に求める最小不可欠情報といえば、現在走行中の道路の名称であり、次に右左折するべき交差点の名称である。直進したり、道なりに通過したりすればすむような交差点については、その誘導情報が表示されなかったとしても、ドライバは、とくに不便を感じることはない。ドライバは、走行中の道路の名称が分かっていれば、道路の案内標識などから得られる情報と照らし合わせて、自車が誘導経路に乗っているか否かを確認することができる。
【0030】
そこで、本実施形態では、ナビゲーション装置1は、出発地から目的地までの経路を求めたとき、車両が直進または道なりに走行すればいいような交差点では、誘導指示情報を表示せず、右左折などが必要な交差点でのみ誘導指示情報を表示するようにした。このようにすることによって、誘導指示情報を表示する必要がある交差点(以下、誘導個所交差点、または、単に、誘導個所という)の数は、大幅に削減されるとともに、隣接する誘導個所間の距離を長くすることができる。従って、本実施形態では、ナビゲーション装置1は、誘導指示情報の表示を頻繁に行う必要がなくなる。
【0031】
図2は、本実施形態のナビゲーション装置1において行われる経路誘導表示の考え方を説明するための図ある。図2において、2重丸印は出発地、十字星印は目的地を表し、それらをつなぐ折れ線の実線は誘導経路を表している。また、折れ線の折れ点部分の黒丸印は誘導個所、つまり、右左折などが必要な交差点を表している。なお、隣接する誘導個所をつなぐ誘導経路部分は、ここでは直線で表されているが、実際には、直線である必要はない。また、その誘導経路部分には、複数の交差点があってもよい。その場合、自車は、その交差点を直進または道なりに走行する。
【0032】
また、図2において、破線で囲まれた領域は、表示装置に表示される誘導経路および地図の領域を表している。すなわち、ナビゲーション装置1は、自車がある誘導経路を走行中の場合には、その走行中の誘導経路と、その誘導経路を含む地図と、を表示装置51に表示する。このとき、その誘導経路および地図の表示は、自車が次の誘導個所に接近するまでそのまま保持される。なお、その間、自車位置は刻々変わるが、その自車位置は、その表示された地図の中には表示されないものとする。
【0033】
図3は、誘導経路および地図を表示装置51に表示した表示画面の例を示した図である。図3に示された表示画面70において、2重丸印は自車が前回通過した誘導個所、星印は次に通過予定の誘導個所を表し、その間をつなぐ矢印付の太い実線は誘導経路を表している。また、この表示画面70の右下部分には、当該誘導経路の道路名称、次の誘導個所の交差点の名称、その交差点への予想到着時刻などが表示される。さらに、その表示画面の左上部分には、地図の方位、縮尺、そのときの時刻などの情報が表示されるとともに、目的地の地名や目的地への予想到着時刻などが表示される。
【0034】
なお、ここでは、表示画面70に表示される地図の縮尺や方位の傾きは、当該誘導経路が画面いっぱいに表示されるように、制御ユニット10が、適宜、計算して決定するものとするが、ドライバの設定により、縮尺や方位の傾きを固定したり、設定したりできるようにしておいてもよい。
【0035】
ナビゲーション装置1は、表示画面70を、自車が出発点を出発するとき、あるいは、誘導個所の交差点を通過するとすぐに表示する。そして、マップマッチングなどにより、自車が所定の誘導経路に乗ったことを確認すると、表示装置51への電力供給を遮断する。前記したように、表示装置51は、電子ペーパにより構成されているので、そのとき表示装置51に表示されている内容は、その後も表示されたままとなる。
【0036】
すなわち、表示画面70には、自車が次の誘導個所に近付くまで同じ表示がされたままとなり、自車位置は表示されない。従って、ドライバは、その間、表示画面70に表示された誘導経路の地図しか見ることができないが、その表示画面70には、次の誘導個所の交差点の名称(図3では、「原宿」交差点)や走行中の誘導経路の道路名称(図3では、「国道1号(横浜方面)」)などが表示されているので、ドライバにとってとくに不都合となることはない。ドライバは、次の誘導個所までは、ひたすらに、自車を道なりに、また、交差点では直進して走行させればよい。
【0037】
なお、本実施形態では、ナビゲーション装置1は、表示装置51の電力供給を遮断するとき、GPS受信機21を含む位置検出ユニット20への電力供給も併せて遮断する。その場合、ナビゲーション装置1は、自車位置を検出することができなくなり、その結果、表示画面70にも自車位置を表示することができない。しかしながら、前記したように、ドライバにとっては、走行中の道路名称と左右折すべき次の交差点の名称が分かればよいのであって、自車位置が表示されないことによる不便はあまりない。
【0038】
一方、GPS受信機21を含む位置検出ユニット20への電力供給を遮断すれば、その分、ナビゲーション装置1の消費電力が削減されるので、表示装置51への電力供給の遮断と併せて、より大きな節電効果が得られる。
【0039】
図4は、自車が誘導個所の交差点に接近したときに表示装置51に表示される誘導個所案内の表示画面の例を示した図である。図4に示すように、その表示画面80には、誘導個所の交差点近傍の地図が大きく表示され、その交差点の名称とその交差点での誘導指示情報が表示される。その誘導指示情報は、交差点位置に誘導マークとして右折または左折を示す矢印が表示されるほか、表示画面80の左端部に文字で「右折」、「左折」などと表示される。また、図示していないが、表示画面80には、「右折専用レーンあり」などの当該交差点についての詳細な情報を表示してもよい。
【0040】
ナビゲーション装置1は、このような表示画面80を、自車が次の誘導個所の交差点に所定の距離まで接近したとき、例えば、1km手前に到達したときに表示する。ところが、位置検出ユニット20への電力供給が遮断されている場合には、ナビゲーション装置1は、自車位置の検出、すなわち、表示画面80を表示すべきタイミングの検出を行うことができない。そこで、本実施形態では、ナビゲーション装置1は、次の誘導個所交差点への到達所要時間を予測して、その予測した到達所要時間に基づき、早めに位置検出ユニット20への電力供給を再開する。そして、その位置検出ユニット20によって検出される自車位置に基づき、自車が表示画面80を表示するタイミングを検出する。
【0041】
また、図4に示すように、表示装置51の表示画面80の外の左下部分には、緑色LED81および赤色LED82が設けられている。緑色LED81および赤色LED82は、自車位置が次の誘導個所の交差点へどの程度接近しているかを示すために用いられる。例えば、次の誘導個所交差点までの距離が、1km以内になったときには、緑色LED81が点灯され、また、200m以内になったときには、赤色LED82が点灯される。
【0042】
なお、表示画面80を表示する時点では、位置検出ユニット20への電力供給が再開されているので、自車位置を表示画面80の中に表示することも可能であるが、その場合には、一部であるにせよ表示画面80の表示が頻繁に変更されることになる。そこで、ここでは、その表示変更時の消費電力を節減するために、自車位置を表示画面80の中に表示せず、およその自車位置を緑色LED81および赤色LED82により示すようにしたものである。
【0043】
また、本実施形態では、およその自車位置を表すのに2つのLED用いているが、およその自車位置を表す方法は、これに限定されることはない。例えば、赤色LED82のみを用い、次の誘導個所交差点までの距離が、例えば、1km以内になったときには、赤色LED82が点灯し、また、200m以内になったときには、赤色LED82を点滅させるようにしてもよい。
【0044】
図5は、自車が誘導個所の交差点を通過後に表示装置51に表示される表示画面の例を示した図である。自車が誘導個所の交差点を通過すると、ナビゲーション装置1は、表示画面70(図3参照)と同様の表示画面90を表示する。従って、表示画面90と表示画面70とは、誘導経路およびその誘導経路を含む地図のデータが異なるだけで表示される項目は同じである。
【0045】
なお、図3〜図5に表示されている地名、交差点名称、道路名称などや地図の形状は、一部に現実に存在するものが含まれているが、現実を忠実に表したものではなく、単に、例として示した架空のものである。
【0046】
図6は、節電動作の切替えおよび経路誘導表示の切替えのタイミングの例を示した図である。図6に示すように、ナビゲーション装置1は、自車が出発地を出発、または、誘導個所の交差点を通過すると、例えば、表示画面70(図3参照)のような表示画面を表示装置51に表示する。その後、引き続いて、自車が所定の誘導経路に乗ったことを確認すると(ステップS1)、ナビゲーション装置1は、表示装置51および位置検出ユニット20への電力供給を遮断する。
【0047】
このとき、ナビゲーション装置1は、自車が次の誘導個所の交差点に到達するまでの所要時間を予測し、その所要時間から所定の時間、例えば、2分程度を差し引いた時間を時間T1とする。そして、時間T1の間、表示装置51および位置検出ユニット20への電力供給を遮断したままとし、電力供給遮断後、時間T1が経過した後、表示装置51および位置検出ユニット20への電力供給を再開する(ステップS2)。
【0048】
このステップS1〜ステップS2の間は、ナビゲーション装置1の節電動作の期間であり、表示装置51の表示機能および位置検出ユニット20の位置検出機能は停止する。ただし、表示装置51が電子ペーパであるので、先に表示された表示画面70のような表示画面は、表示されたままの状態になるので、前記したようにドライバにとって不都合はない。
【0049】
なお、この間、制御ユニット10がとくに実行すべき処理が他にない場合には、制御ユニット10自身もスタンバイモードまたは休止モードに遷移して、節電に寄与させるようにしてもよい。この場合には、当然ながら、操作ユニット30、外部記憶ユニット40、表示・出力ユニット50の電力供給も遮断することができる。
【0050】
また、表示装置51として電子ペーパを用いた場合には、その大部分の電力は、表示画面の表示内容が書き換えられたときにのみ消費される。このことを考慮すれば、ステップS1〜ステップS2の節電動作の間であっても、表示装置51については電力供給を遮断しないとしてもよい。電子ペーパの場合には、頻繁に表示内容を変更しない限りは、電力供給の遮断制御をとくにしなくても、十分な節電効果を得ることができる。
【0051】
位置検出ユニット20への電力供給が再開されると、位置検出ユニット20により自車位置の検出が可能となるので、ナビゲーション装置1は、自車位置を検知し、その検出した自車位置から次の誘導個所交差点までの距離があらかじめ定められた距離L1(例えば、1km)以下になった場合には、次の誘導個所交差点を拡大して表示した、例えば、表示画面80を表示して、誘導個所案内を開始する(ステップS3)。また、このとき、緑色LED81を点灯するとともに、「あと1000mで○○交差点です。右折する準備を始めて下さい。」といった音声メッセージを出力する。
【0052】
また、自車位置から次の誘導個所交差点までの距離があらかじめ定められた誘導指示開始の距離L2(例えば、200m)以下になった場合には、ナビゲーション装置1は、赤色LED82を点灯し、例えば、「次の交差点を右折して下さい。」といった音声メッセージを出力するなど、交差点での具体的な誘導指示を開始する(ステップS4)。
【0053】
また、自車位置から次の誘導個所交差点までの距離があらかじめ定められた誘導指示終了の距離L3(例えば、10m)以下になった場合には、ナビゲーション装置1は、交差点での誘導指示を終了する(ステップS5)。そして、例えば、方位センサ22などからの出力を得て、自車の右折または左折などを確認すると、さらに、次の誘導交差点までの新たな表示画面90(図5参照)を表示する。
【0054】
続いて、図7〜図9を参照して、以上に説明したナビゲーション装置1における省電力を考慮した経路誘導機能を実現するための処理フローについて説明する。ここで、図7は、誘導経路生成処理の処理フローの例を示した図、図8は、電力制御誘導処理の処理フローの例を示した図、図9は、誘導個所案内処理の処理フローの例を示した図である。
【0055】
図7に示す誘導経路生成処理は、誘導経路生成処理部11(図1参照)の機能を実現するための処理であり、ナビゲーション装置1に電力が投入され、車両の走行が開始されるとき、あるいは、車両のドライバが目的地を設定し直すとき、制御ユニット10の演算処理装置(以下、CPUという)によって実行される。
【0056】
CPUは、まず、位置検出ユニット20から得られる位置データ(GPS受信機21によって得られる現在位置の緯度・経度のデータやそれを補正するために必要な方位センサ22、速度センサ23などから得られるデータ)に、マップマッチングなどの処理を施すことによって、自車の現在位置を検出する(ステップS11)。次に、CPUは、ドライバが操作ユニット30を介して設定する目的情報を取得する(ステップS12)。
【0057】
次に、CPUは、地図データ記憶部41などを参照して、目的地までの誘導経路を計算する(ステップS13)。このとき、CPUは、最短時間経路や最短距離経路などあらかじめドライバによって指定された誘導経路を計算する。そして、CPUは、その計算により得られた誘導経路に含まれる各交差点の状況を解析して、右左折などが必要な交差点を誘導個所として抽出する(ステップS14)。
【0058】
次に、CPUは、地図データ記憶部41を参照して、ある誘導個所(または現在位置)から次の誘導個所(または目的地)までの誘導経路を含む地図を取得する(ステップS15)。なお、ここでいう誘導経路を含む地図とは、図2において破線で示した各領域の地図をいう。CPUは、以上の処理を終了すると、図8に示す電力制御誘導処理を開始する(ステップS16)。
【0059】
なお、長距離を走行する場合には、誘導個所と誘導個所との間が長くなることがあり得るが、そのときには、直進するだけの交差点であっても、適宜、誘導個所としてもよい。すなわち、CPUは、ステップS14の処理において、隣接する2つの誘導個所間の距離が、例えば、20kmを超えるような場合には、その途中に存在する直進交差点を、適宜、選択して誘導個所とし、誘導個所間の距離が20km以下になるように調整する。
【0060】
図8に示す電力制御誘導処理は、電力制御誘導処理部12の機能を実現するための処理であり、制御ユニット10のCPUによって実行される。
【0061】
CPUは、まず、位置検出ユニット20から得られる位置データに、マップマッチングなどの処理を施すことによって、自車の現在位置を検出し(ステップS21)、その現在位置から次の誘導個所までの地図を表示装置51に表示する(ステップS22)。なお、この地図は、先に、誘導経路生成処理(図7参照)のステップS15で取得した地図の1つである。
【0062】
次に、CPUは、自車の現在位置が、先に計算して求めた誘導経路上に乗っているか否かを判定する(ステップS23)。その判定の結果、自車の現在位置が誘導経路上に乗っている場合には(ステップS23でYES)、そのとき通過した誘導個所の情報を記憶装置に記録する(ステップS24)。なお、ここでいう通過した誘導個所とは、出発地も含むとする。また、誘導個所の情報とは、その誘導個所交差点の識別番号、交差点名などであってもよく、また、前記検出した現在位置の緯度・経度などであってもよい。なお、このステップS24の処理は、移動経路記録処理部14の処理に対応する。
【0063】
次に、CPUは、地図データ記憶部41を参照して、現在位置から次の誘導個所までの距離d1を算出する(ステップS25)。なお、地図データ記憶部41には、各交差点間をつなぐ道路をリンクとしたき、そのリンク長がリンクの識別番号に対応付けられて記憶されており、また、誘導経路は、複数のリンクの識別番号の列から構成されるので、距離d1を算出するのは容易である。
【0064】
次に、CPUは、距離d1をあらかじめ定められた誘導個所案内開始距離L1と比較し(ステップS26)、距離d1が誘導個所案内開始距離L1より長い場合には(ステップS26でYES)、位置検出ユニット20の速度センサ23から自車の走行速度を取得する(ステップS27)。なお、誘導個所案内開始距離L1は、図6における距離L1と同じものである。
【0065】
次に、CPUは、前記取得した走行速度を走行中リンクの法定速度と比較し(ステップS28)、走行速度が法定速度より大きい場合には(ステップS28でYES)、次の誘導個所に到達するのに必要な走行所要時間T0を、T0=距離d1/走行速度の式により算出し(ステップS29)、また、前記取得した走行速度が法定速度以下である場合には(ステップS28でNO)、走行所要時間T0を、T0=距離d1/法定速度の式により算出する(ステップS30)。
【0066】
なお、ステップS27〜ステップS30の処理は、次の誘導個所に到達するのに必要な走行所要時間T0を予測する処理である。ここでは、その走行所要時間T0を、次の誘導個所までの距離d1と自車の走行速度または法定速度とに基づき算出しているが、その算出方法は、自車が次の誘導個所に到達する最後のリンクまたは最後に近いリンクを走行している場合に適した算出方法である。
【0067】
これに対し、次の誘導個所までに複数の(多数の)リンクからなる誘導経路を走行する必要がある場合には、例えば、地図データ記憶部41に記憶されている各リンクのリンク旅行時間に基づき、次の誘導個所までの走行所要時間T0を求めるほうが合理的である。すなわち、地図データ記憶部41には、各リンクの旅行時間がリンクの識別番号に対応付けられて記憶されているので、CPUは、次の誘導個所までの誘導経路を構成するリンクの識別番号の列に基づき、次の誘導個所までの総旅行時間、つまり、走行所要時間を容易に算出することができる。
【0068】
そこで、走行所要時間T0を予測する処理は、ステップS27〜ステップS30の処理に限定されず、次の誘導個所に到達するまでに走行するリンク数に応じて、その予測の方法を切替えるようにしてもよい。
【0069】
次に、CPUは、前記算出した走行所要時間T0を所定の時間T2と比較し(ステップS31)、走行所要時間T0が所定の時間T2より大きい場合には(ステップS31でYES)、電源ユニット60に対し、位置検出ユニット20や表示・出力ユニット50などへの電力供給の遮断を指示する(ステップS32)。また、CPUは、T1=T0−T2の式によって得られる時間T1の間、待機し(ステップS33)、その時間T1が経過すると、電源ユニット60に対し、位置検出ユニット20や表示・出力ユニット50などへの電力供給の再開を指示し(ステップS34)、再度、ステップS21以下の処理を実行する。
【0070】
なお、ここでいう所定の時間T2は、CPUが、図4に示した表示画面80のような表示を行い、誘導個所交差点での誘導指示を行うのに必要な時間である。図6の説明では、時間T2をあらかじめ定められた値であるとし、その値は、例えば、2分であるとしている。ただし、時間T2は、必ずしも固定値である必要はなく、自車の走行速度や法定速度、あるいは、次に誘導個所までの距離d1などに依存する値であってもよい。
【0071】
また、ステップS33のCPUが待機している間には、CPUは、経路誘導に関係のない他の処理を実行してもよく、また、制御ユニット10に対する電力供給を遮断して、いわゆるスタンバイモードや休止モードに遷移してもよい。なお、よく知られているように、制御ユニット10の一部(ウォッチドッグタイマや一部のメモリ)には、スタンバイモードや休止モードであっても電力が供給される。
【0072】
再び、図8の説明に戻る。ステップS31の比較において、次の誘導個所までの走行所要時間T0が所定の時間T2以下である場合には(ステップS31でNo)、節電動作をする時間的余裕がないことを意味するので、CPUは、電力供給を遮断することなく、再度、ステップS21以下の処理を実行する。
【0073】
また、ステップS26の比較において、次の誘導個所までの距離d1が距離L1以下である場合には(ステップS26でNo)、CPUは、図9に示す誘導個所案内処理を実行し(ステップS35)、その実行を終了すると、再度、ステップS21以下の処理を実行する。
【0074】
また、ステップS23の判定で、自車の現在位置が誘導経路上に乗っていない場合には(ステップS23でNo)、CPUは、その現在位置が誘導経路外の他のリンク上に乗っているか否かを判定する(ステップS36)。その判定の結果、現在位置が誘導経路外の他のリンク上に乗っている場合には(ステップS36でYES)、CPUは、自車が誘導経路から逸脱したと判定し、リルートを行う(ステップS37)。なお、リルートを行うには、図7に示した誘導経路生成処理に戻って、ステップS13からの処理を再度実行すればよい。
【0075】
また、ステップS36の判定で、自車の現在位置が誘導経路外の他のリンク上にも乗っていない場合には(ステップS36でNO)、CPUは、自車が走行中のリンクを判定できないとして、再度ステップS21からの処理を実行する。なお、CPUが自車走行中のリンクを見失うことは、2つのリンクのなす角度が小さい場合、その交差点近傍で、しばしば発生する状況である。
【0076】
続いて、図9に示す誘導個所案内処理は、誘導個所案内処理部13(図1参照)の機能を実現するための処理であり、制御ユニット10のCPUによって実行され、その処理は、自車位置と次の誘導個所の交差点までの距離d1があらかじめ定められた誘導個所案内開始距離L1(例えば、1km)より小さくなったとき開始される。
【0077】
CPUは、まず、表示画面80(図4参照)のような誘導個所交差点の詳細地図を表示装置51に表示する(ステップS41)。次に、CPUは、位置検出ユニット20から得られる位置データに、マップマッチングなどの処理を施すことによって、自車の現在位置を検出し(ステップS42)、誘導個所となる交差点までの距離d2を算出する(ステップS43)。そして、その距離d2をあらかじめ定められた誘導処理開始距離L2(例えば、200m)と比較する(ステップS44)。
【0078】
その比較の結果、距離d2が誘導処理開始距離L2以上である場合には(ステップS44でNo)、CPUは、緑色LED81(図4参照)を点灯し、音声出力装置53を介して、交差点までの距離を知らせる音声案内メッセージを出力する(ステップS45)。これにより、ドライバは、右左折が必要な誘導個所の交差点に近付いたことを知ることができる。
【0079】
一方、距離d2が誘導処理開始距離L2より小さい場合には(ステップS44でYES)、CPUは、距離d2を、さらに、あらかじめ定められた誘導処理終了距離L3(例えば、10m)と比較する(ステップS46)。その比較の結果、距離d2が誘導処理終了距離L3以上である場合には(ステップS46でNo)、CPUは、赤色LED82(図4参照)を点灯し、音声出力装置53を介して、当該交差点での自車誘導の音声案内メッセージを出力する(ステップS47)。これにより、ドライバは、目前の交差点で右折または左折すべき方向を確認することができる。
【0080】
CPUは、音声メッセージを出力するステップS45またはステップS47の処理を実行したときには、その後、ステップS42へ戻り、ステップS42以下の処理を繰り返して実行する。なお、その繰り返しの処理により、ステップS45またはステップS47の音声メッセージ出力を繰り返し行うことになった場合には、2回目以降の音声出力は省略してもよい。
【0081】
また、ステップS46の比較で、距離d2が誘導処理終了距離L3より小さい場合には(ステップS46でYES)、CPUは、自車が目的地に到着したか否かを判定する(ステップS48)。その判定の結果、自車が目的地に到着していない場合には(ステップS48でNO)、図9の誘導個所案内処理を終了する(ステップS51)。なお、この誘導個所案内処理の終了は、図8のステップS35の誘導個所案内処理の終了に対応する。
【0082】
また、ステップS48の判定で、自車が目的地に到着した場合には(ステップS48でYES)、CPUは、音声出力装置53を介して、目的地への到着を知らせる音声案内メッセージを出力し(ステップS49)、当該目的地までの経路誘導処理全体を終了する(ステップS50)。
【0083】
なお、目的地への到着判定は、次の誘導個所が目的地であるか否かを判定することによって行うことができるので、距離d2が誘導処理終了距離L3より小さくなる前にも行うことができる。例えば、ステップS47を実行する前に目的地への到着を判定し、次の誘導個所が目的地であった場合には、ステップS49で出力する音声案内メッセージを、ステップS47の時点で出力してもよい。
【0084】
以上、本実施形態によれば、制御ユニット10は、出発地から目的地までの誘導経路を求めたとき、その誘導経路に含まれる交差点の中から右左折が必要な交差点を誘導個所として抽出し、自車がある誘導個所(出発点を含む)を通過したときには、その誘導個所から次の誘導個所までの誘導経路を含む地図を表示装置51に表示するとともに、次の誘導個所に到る走行所要時間(T0)を予測し、その後、引き続いて、予測した走行所要時間(T0)から所定の時間(T2)を差し引いた時間(T1=T0−T2)の間、位置検出ユニット20などへの電力供給の遮断を電源ユニット60へ指示する。
【0085】
そして、制御ユニット10は、交差点ごとでの誘導指示表示を省略し、誘導個所交差点でのみ誘導指示表示を行うようにしている。従って、表示装置51に対する表示内容の変更頻度は、大幅に削減される。
【0086】
従って、本実施形態では、表示装置51として電子ペーパを用いたことによる省電力効果のほかにも、電子ペーパに表示する表示頻度が削減された効果による省電力効果を期待することができる。さらには、表示装置51や位置検出ユニット20などへの電力供給を、時間T1の間、遮断することによる消費電力低減効果もあるので、従来技術に比べ、より大きな省電力効果を期待することができる。
【0087】
一方、表示装置51への電力供給が遮断されたとしても、表示装置51には、次の誘導個所までの誘導経路は表示され続けるので、ドライバにとっての利便性はほとんど低下しない。また、直進交差点での誘導指示表示が行われなかったとしても、ドライバにとっての利便性は低下しない。
【図面の簡単な説明】
【0088】
【図1】本発明の実施形態に係るナビゲーション装置のブロック構成の例を示した図。
【図2】本発明の実施形態に係るナビゲーション装置において行われる経路誘導表示の考え方を説明するための図。
【図3】誘導経路および地図を表示装置に表示した表示画面の例を示した図。
【図4】自車が誘導個所の交差点に接近したときに表示装置に表示される誘導個所案内の表示画面の例を示した図。
【図5】自車が誘導個所の交差点を通過後に表示装置に表示される表示画面の例を示した図。
【図6】節電動作の切替えおよび経路誘導表示の切替えのタイミングの例を示した図。
【図7】誘導経路生成処理の処理フローの例を示した図。
【図8】電力制御誘導処理の処理フローの例を示した図。
【図9】誘導個所案内処理の処理フローの例を示した図。
【符号の説明】
【0089】
1 ナビゲーション装置
10 制御ユニット
11 誘導経路生成処理部
12 電力制御誘導処理部
13 誘導個所案内処理部
14 移動経路記録処理部
20 位置検出ユニット
21 GPS受信機
22 方位センサ
23 速度センサ
30 操作ユニット
40 外部記憶ユニット
41 地図データ記憶部
50 表示・出力ユニット
51 表示装置
52 案内用LED
53 音声出力装置
60 電源ユニット
【特許請求の範囲】
【請求項1】
GPS受信機を含んでなり、車両の現在位置を検出する位置検出装置と、
ドライバが操作する情報を入力する入力装置と、
道路ネットワークの地図データを記憶した記憶装置と、
前記車両が走行開始するとき、前記位置検出装置を介して出発地の位置を検出するとともに、前記入力装置を介して入力される情報に基づき目的地を設定し、前記地図データを参照して、前記出発地から前記目的地までの誘導経路を探索する制御装置と、
電力供給を遮断しても表示内容を継続して表示可能な電子ペーパを含んでなり、前記誘導経路の少なくとも一部を含んだ地図を表示する表示装置と、
を含んで構成され、
前記車両に搭載されたナビゲーション装置であって、
前記制御装置は、
前記地図データを参照して、前記出発地から前記目的地までの前記誘導経路に含まれる交差点のうち、右左折が必要な交差点を誘導個所交差点として抽出し、
前記車両が前記出発地を出発したとき、または、前記位置検出装置から得られる現在位置に基づき前記車両が前記誘導個所交差点のうちの1の誘導個所交差点の通過を確認したときには、前記出発地または前記1の誘導個所交差点である第1の誘導個所交差点から、前記誘導経路に沿って次に位置する誘導個所交差点または前記目的地である第2の誘導個所交差点までの誘導経路を含んだ地図を、前記表示装置に表示し、
前記車両がそのときの現在位置から前記第2の誘導個所交差点に到達するのに必要な移動所要時間を予測し、その予測した移動所要時間からあらかじめ定められた所定の時間を差し引いた時間を電力供給遮断時間として求め、
その後、引き続いて、
少なくとも前記位置検出装置を含む部分への電力供給を、前記電力供給遮断時間の間、遮断し、前記電力供給遮断時間が経過した後、前記電力供給を遮断した部分への電力供給を再開すること
を特徴とするナビゲーション装置。
【請求項2】
前記制御装置は、
前記第1の誘導個所交差点から前記第2の誘導個所交差点までの誘導経路を含む地図を前記表示装置に表示するときには、その表示した部分の誘導経路の道路名称および前記第2の誘導個所交差点の名称を前記地図に重ね合わせて表示すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記制御装置は、
前記電力供給を遮断した部分への電力供給を再開した後には、前記位置検出装置を介して前記車両の現在位置を検出し、その検出した現在位置から前記第2の誘導個所交差点までの距離を算出し、
前記算出した距離が、あらかじめ定められた誘導個所案内開始距離よりも小さい場合には、前記第2の誘導個所交差点を含む部分の拡大した詳細地図を、前記表示装置に表示すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
前記表示装置には、少なくとも1つの発光ダイオードを付属させ、
前記制御装置は、
前記第2の誘導個所交差点を含む部分の拡大した詳細地図を前記表示装置に表示しているとき、前記発光ダイオードの発光のさせ方を変えることにより、前記車両のおよその位置を表すようにしたこと
を特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記制御装置は、
前記位置検出装置を介して前記車両の現在位置を取得し、
前記取得した現在位置に基づき、前記車両が前記誘導個所交差点を通過したことを確認した後、さらに、前記車両が前記誘導経路上にあることを確認したときには、前記取得した現在位置の情報または前記通過した誘導個所交差点の情報を、前記記憶装置に記録すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
GPS受信機を含んでなり、車両の現在位置を検出する位置検出装置と、
ドライバが操作する情報を入力する入力装置と、
道路ネットワークの地図データを記憶した記憶装置と、
前記車両が走行開始するとき、前記位置検出装置を介して出発地の位置を検出するとともに、前記入力装置を介して入力される情報に基づき目的地を設定し、前記地図データを参照して、前記出発地から前記目的地までの誘導経路を探索する制御装置と、
電力供給を遮断しても表示内容を継続して表示可能な電子ペーパを含んでなり、前記誘導経路の少なくとも一部を含んだ地図を表示する表示装置と、
を含んで構成され、
前記車両に搭載されたナビゲーション装置におけるナビゲーション方法であって、
前記制御装置は、
前記地図データを参照して、前記出発地から前記目的地までの前記誘導経路に含まれる交差点のうち、右左折が必要な交差点を誘導個所交差点として抽出し、
前記車両が前記出発地を出発したとき、または、前記位置検出装置から得られる現在位置に基づき前記車両が前記誘導個所交差点のうちの1の誘導個所交差点の通過を確認したときには、前記出発地または前記1の誘導個所交差点である第1の誘導個所交差点から、前記誘導経路に沿って次に位置する誘導個所交差点または前記目的地である第2の誘導個所交差点までの誘導経路を含んだ地図を、前記表示装置に表示し、
前記車両がそのときの現在位置から前記第2の誘導個所交差点に到達するのに必要な移動所要時間を予測し、その予測した移動所要時間からあらかじめ定められた所定の時間を差し引いた時間を電力供給遮断時間として求め、
その後、引き続いて、
少なくとも前記位置検出装置を含む部分への電力供給を、前記電力供給遮断時間の間、遮断し、前記電力供給遮断時間が経過した後、前記電力供給を遮断した部分への電力供給を再開すること
を特徴とするナビゲーション方法。
【請求項7】
前記制御装置は、
前記第1の誘導個所交差点から前記第2の誘導個所交差点までの誘導経路を含む地図を前記表示装置に表示するときには、その表示した部分の誘導経路の道路名称および前記第2の誘導個所交差点の名称を前記地図に重ね合わせて表示すること
を特徴とする請求項6に記載のナビゲーション方法。
【請求項8】
前記制御装置は、
前記電力供給を遮断した部分への電力供給を再開した後には、前記位置検出装置を介して前記車両の現在位置を検出し、その検出した現在位置から前記第2の誘導個所交差点までの距離を算出し、
前記算出した距離が、あらかじめ定められた誘導個所案内開始距離よりも小さい場合には、前記第2の誘導個所交差点を含む部分の拡大した詳細地図を、前記表示装置に表示すること
を特徴とする請求項6に記載のナビゲーション方法。
【請求項9】
前記表示装置には、少なくとも1つの発光ダイオードが付属され、
前記制御装置は、
前記第2の誘導個所交差点を含む部分の拡大した詳細地図を前記表示装置に表示しているとき、前記発光ダイオードの発光のさせ方を変えることにより、前記車両のおよその位置を表すようにしたこと
を特徴とする請求項8に記載のナビゲーション方法。
【請求項10】
前記制御装置は、
前記位置検出装置を介して前記車両の現在位置を取得し、
前記取得した現在位置に基づき、前記車両が前記誘導個所交差点を通過したことを確認した後、さらに、前記車両が前記誘導経路上にあることを確認したときには、前記取得した現在位置の情報または前記通過した誘導個所交差点の情報を、前記記憶装置に時系列に記録すること
を特徴とする請求項6に記載のナビゲーション方法。
【請求項1】
GPS受信機を含んでなり、車両の現在位置を検出する位置検出装置と、
ドライバが操作する情報を入力する入力装置と、
道路ネットワークの地図データを記憶した記憶装置と、
前記車両が走行開始するとき、前記位置検出装置を介して出発地の位置を検出するとともに、前記入力装置を介して入力される情報に基づき目的地を設定し、前記地図データを参照して、前記出発地から前記目的地までの誘導経路を探索する制御装置と、
電力供給を遮断しても表示内容を継続して表示可能な電子ペーパを含んでなり、前記誘導経路の少なくとも一部を含んだ地図を表示する表示装置と、
を含んで構成され、
前記車両に搭載されたナビゲーション装置であって、
前記制御装置は、
前記地図データを参照して、前記出発地から前記目的地までの前記誘導経路に含まれる交差点のうち、右左折が必要な交差点を誘導個所交差点として抽出し、
前記車両が前記出発地を出発したとき、または、前記位置検出装置から得られる現在位置に基づき前記車両が前記誘導個所交差点のうちの1の誘導個所交差点の通過を確認したときには、前記出発地または前記1の誘導個所交差点である第1の誘導個所交差点から、前記誘導経路に沿って次に位置する誘導個所交差点または前記目的地である第2の誘導個所交差点までの誘導経路を含んだ地図を、前記表示装置に表示し、
前記車両がそのときの現在位置から前記第2の誘導個所交差点に到達するのに必要な移動所要時間を予測し、その予測した移動所要時間からあらかじめ定められた所定の時間を差し引いた時間を電力供給遮断時間として求め、
その後、引き続いて、
少なくとも前記位置検出装置を含む部分への電力供給を、前記電力供給遮断時間の間、遮断し、前記電力供給遮断時間が経過した後、前記電力供給を遮断した部分への電力供給を再開すること
を特徴とするナビゲーション装置。
【請求項2】
前記制御装置は、
前記第1の誘導個所交差点から前記第2の誘導個所交差点までの誘導経路を含む地図を前記表示装置に表示するときには、その表示した部分の誘導経路の道路名称および前記第2の誘導個所交差点の名称を前記地図に重ね合わせて表示すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記制御装置は、
前記電力供給を遮断した部分への電力供給を再開した後には、前記位置検出装置を介して前記車両の現在位置を検出し、その検出した現在位置から前記第2の誘導個所交差点までの距離を算出し、
前記算出した距離が、あらかじめ定められた誘導個所案内開始距離よりも小さい場合には、前記第2の誘導個所交差点を含む部分の拡大した詳細地図を、前記表示装置に表示すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
前記表示装置には、少なくとも1つの発光ダイオードを付属させ、
前記制御装置は、
前記第2の誘導個所交差点を含む部分の拡大した詳細地図を前記表示装置に表示しているとき、前記発光ダイオードの発光のさせ方を変えることにより、前記車両のおよその位置を表すようにしたこと
を特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記制御装置は、
前記位置検出装置を介して前記車両の現在位置を取得し、
前記取得した現在位置に基づき、前記車両が前記誘導個所交差点を通過したことを確認した後、さらに、前記車両が前記誘導経路上にあることを確認したときには、前記取得した現在位置の情報または前記通過した誘導個所交差点の情報を、前記記憶装置に記録すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
GPS受信機を含んでなり、車両の現在位置を検出する位置検出装置と、
ドライバが操作する情報を入力する入力装置と、
道路ネットワークの地図データを記憶した記憶装置と、
前記車両が走行開始するとき、前記位置検出装置を介して出発地の位置を検出するとともに、前記入力装置を介して入力される情報に基づき目的地を設定し、前記地図データを参照して、前記出発地から前記目的地までの誘導経路を探索する制御装置と、
電力供給を遮断しても表示内容を継続して表示可能な電子ペーパを含んでなり、前記誘導経路の少なくとも一部を含んだ地図を表示する表示装置と、
を含んで構成され、
前記車両に搭載されたナビゲーション装置におけるナビゲーション方法であって、
前記制御装置は、
前記地図データを参照して、前記出発地から前記目的地までの前記誘導経路に含まれる交差点のうち、右左折が必要な交差点を誘導個所交差点として抽出し、
前記車両が前記出発地を出発したとき、または、前記位置検出装置から得られる現在位置に基づき前記車両が前記誘導個所交差点のうちの1の誘導個所交差点の通過を確認したときには、前記出発地または前記1の誘導個所交差点である第1の誘導個所交差点から、前記誘導経路に沿って次に位置する誘導個所交差点または前記目的地である第2の誘導個所交差点までの誘導経路を含んだ地図を、前記表示装置に表示し、
前記車両がそのときの現在位置から前記第2の誘導個所交差点に到達するのに必要な移動所要時間を予測し、その予測した移動所要時間からあらかじめ定められた所定の時間を差し引いた時間を電力供給遮断時間として求め、
その後、引き続いて、
少なくとも前記位置検出装置を含む部分への電力供給を、前記電力供給遮断時間の間、遮断し、前記電力供給遮断時間が経過した後、前記電力供給を遮断した部分への電力供給を再開すること
を特徴とするナビゲーション方法。
【請求項7】
前記制御装置は、
前記第1の誘導個所交差点から前記第2の誘導個所交差点までの誘導経路を含む地図を前記表示装置に表示するときには、その表示した部分の誘導経路の道路名称および前記第2の誘導個所交差点の名称を前記地図に重ね合わせて表示すること
を特徴とする請求項6に記載のナビゲーション方法。
【請求項8】
前記制御装置は、
前記電力供給を遮断した部分への電力供給を再開した後には、前記位置検出装置を介して前記車両の現在位置を検出し、その検出した現在位置から前記第2の誘導個所交差点までの距離を算出し、
前記算出した距離が、あらかじめ定められた誘導個所案内開始距離よりも小さい場合には、前記第2の誘導個所交差点を含む部分の拡大した詳細地図を、前記表示装置に表示すること
を特徴とする請求項6に記載のナビゲーション方法。
【請求項9】
前記表示装置には、少なくとも1つの発光ダイオードが付属され、
前記制御装置は、
前記第2の誘導個所交差点を含む部分の拡大した詳細地図を前記表示装置に表示しているとき、前記発光ダイオードの発光のさせ方を変えることにより、前記車両のおよその位置を表すようにしたこと
を特徴とする請求項8に記載のナビゲーション方法。
【請求項10】
前記制御装置は、
前記位置検出装置を介して前記車両の現在位置を取得し、
前記取得した現在位置に基づき、前記車両が前記誘導個所交差点を通過したことを確認した後、さらに、前記車両が前記誘導経路上にあることを確認したときには、前記取得した現在位置の情報または前記通過した誘導個所交差点の情報を、前記記憶装置に時系列に記録すること
を特徴とする請求項6に記載のナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−151462(P2010−151462A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−327204(P2008−327204)
【出願日】平成20年12月24日(2008.12.24)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月24日(2008.12.24)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]