
ナビゲーション装置およびナビゲーション装置用のプログラム
【課題】ナビゲーション装置において、複数のルートについての予想到着時刻の誤差範囲
を、ユーザが直感的に比較することができるような表示を実現する。
【解決手段】ナビゲーション装置が、目的地までの複数のルートについて、当該目的地ま
での予想到着時刻および当該予想到着時刻の誤差範囲23、24を算出し、当該複数のル
ートのそれぞれについて算出された誤差範囲を、共に画像表示装置に表示させる。
を、ユーザが直感的に比較することができるような表示を実現する。
【解決手段】ナビゲーション装置が、目的地までの複数のルートについて、当該目的地ま
での予想到着時刻および当該予想到着時刻の誤差範囲23、24を算出し、当該複数のル
ートのそれぞれについて算出された誤差範囲を、共に画像表示装置に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置およびナビゲーション装置用のプログラムに関するもの
である。
【背景技術】
【0002】
従来、目的地までのルートを案内するナビゲーション装置おいて、目的地までの予想到
着時刻および当該予想到着時刻の誤差範囲を、時計の針の角度範囲で表す技術が知られて
いる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−47126号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の技術は、案内ルートただ1つのみについて、予想到着時刻および誤差範
囲の表示を行うようになっている。すなわち、ただ単に現在走行中のルートに対する予想
到着時刻の信頼度情報を表示しているに過ぎない。したがって、複数のルートについての
予想到着時刻の誤差範囲を、ユーザが直感的に比較することができるように表示すること
はできない。
【0005】
本発明は上記点に鑑み、ナビゲーション装置において、複数のルートについての予想到
着時刻の誤差範囲を、ユーザが直感的に比較することができるような表示を実現すること
を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための請求項1に記載の発明は、ナビゲーション装置が、目的地ま
での複数のルートについて、当該目的地までの予想到着時刻および当該予想到着時刻の誤
差範囲を算出し、当該複数のルートのそれぞれについて算出された誤差範囲を、共に表示
装置(12)に表示させることである。より具体的には、請求項1に記載の発明は、目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、470)と、前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)と、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)と、を備えたナビゲーション装置である。
【0007】
このように、複数のルートの予想到着時刻の誤差範囲が共に表示されるので、ユーザは
、それらを直感的に比較することができる。例えば、どのルートの予想到着時刻の誤差幅
が少ないか(すなわち、予想到着時刻の信頼度が高いか)等の比較を一目で判別すること
ができる。すなわち、従来よりも良好なルート選択性をユーザに提供することができる。
【0008】
また、請求項2に記載の発明は、前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項1に記載のナビゲーション装置である。また、ナビゲーション装置は、ユーザの現在位置が目的地から第1の基準範囲内に入ったことに基づいて、当該複数のルートのうち、ユーザが所在するルートについて算出された誤差範囲のみを表示装置に表示させるようになっていてもよい。
【0009】
ナビゲーション装置のユーザがある程度目的地に近づくと、複数のルートの予想到着時
刻および誤差範囲の差が、ユーザにとって問題とならない程度に小さくなることが多い。
したがって、上記のようにユーザが目的地に近づくことに基づいて、現在通行中のルート
のみを表示することで、ユーザにとって不要となった可能性の高い情報(すなわち、他の
ルートの誤差範囲の情報)を表示しなくなり、ユーザにとって必要でありながらシンプル
な情報を提供する表示が実現する。
【0010】
また、ナビゲーション装置は、表示装置を制御することによって、ユーザの現在位置が目的地から第2の基準範囲外にあることに基づいて、複数のルートのそれぞれについて算出された誤差範囲を、アナログ時計の針の角度範囲で表し、また、ユーザの現在位置が目的地から第2の基準範囲内に入ったことに基づいて、当該複数のルートのそれぞれについて算出された誤差範囲を、表示画像中の誤差範囲画像の長さで表すと共に、単位時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させるようになっていてもよい。
【0011】
アナログ時計の針の角度範囲で各ルートの誤差範囲を表示する方法は、ユーザが誤差範
囲の時間幅を把握し易いという点で有益である。しかし、ユーザがある程度目的地に近づ
くと、誤差範囲が減少し、その結果表示する角度が非常に狭くなるので、逆にユーザにと
って見難くなってしまう可能性がある。このような、表示角度の先鋭化によって見難くな
るという現象は、複数のルートの誤差範囲の表示が重なってしまったときに更に顕著とな
る。
【0012】
そこで、上記のように、ユーザの現在位置が当該目的地から当該第2の基準範囲内に入
ったことに基づいて、各誤差範囲を表示画像中の誤差範囲画像の長さで表すと共に、単位
時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させれば、ユ
ーザが目的地に近づいて誤差範囲が減少しても、誤差範囲の表示が小さくなり過ぎて見難
くなることがない。
【0013】
このように、目的地への近接度合いに応じて誤差範囲の表示形態を切り替えることで、
目的地への近接度合いによって変化するユーザの見易さに対する要求に対応することがで
きる。
【0014】
また、請求項3、4に記載のように、請求項1、2の発明の特徴は、プログラムとしても捉えることができる。
【0015】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載され
た用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すも
のである。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用ナビゲーション装置1の構成を示す図である。
【図2】制御回路17がルート算出処理のために実行するプログラム100のフローチャートである。
【図3】予想到着時刻表示用のアナログ時計画像の一例を示す。
【図4】予想到着時刻表示用のアナログ時計画像に予想到着時刻の誤差範囲23を重畳した図である。
【図5】予想到着時刻表示用のアナログ時計画像に予想到着時刻の誤差範囲24を更に重畳した図である。
【図6】現在位置マーク25から目的地26までの候補ルート27、28を示す図である。
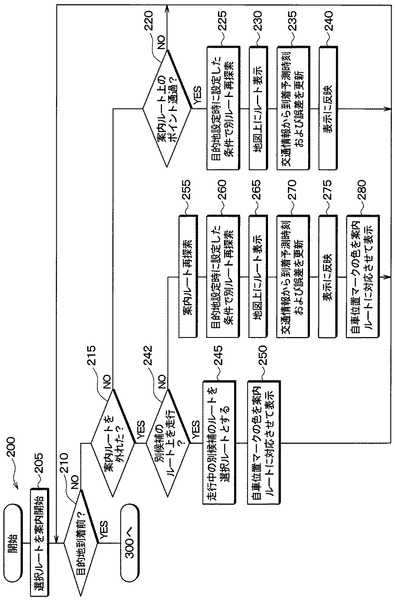
【図7】制御回路17がルート案内処理のために実行するプログラム200のフローチャートである。
【図8】制御回路17が実行するプログラム300のフローチャートである。
【図9】第2実施形態において制御回路17が実行するプログラム400のフローチャートである。
【図10】可変リニアグラフ形態による予想到着時刻および誤差の表示例である。
【発明を実施するための形態】
【0017】
(第1実施形態)
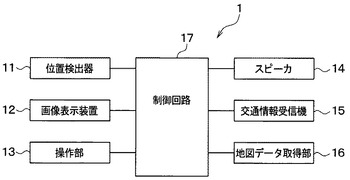
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る車両用ナビ
ゲーション装置1の構成を示す。この車両用ナビゲーション装置1は、位置検出器11、
画像表示装置12、操作部13、スピーカ14、交通情報受信機15、地図データ取得部
16、および制御回路17を有している。
【0018】
位置検出器11は、いずれも周知の図示しない加速度センサ、地磁気センサ、ジャイロ
センサ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々
の性質に基づいた、車両の現在位置、向き、および速度を特定するための情報を制御回路
17に出力する。
【0019】
画像表示装置12は、制御回路17から出力された映像信号に基づいた映像をユーザに
表示する。表示映像としては、例えば現在地を中心とする地図等がある。
【0020】
操作部13は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、
画像表示装置12の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユー
ザによるメカニカルスイッチの押下、タッチパネルのタッチに基づいた信号を制御回路1
7に出力する。
【0021】
交通情報受信機15は、FMラジオ放送局または道路沿いに設置された路上機から繰り
返し(例えば1分毎に)無線送信された交通情報等を繰り返し受信して地図データ取得部
16等の記憶媒体に蓄積する装置である。
【0022】
受信する交通情報は、その交通情報の送信の時点における、リンク毎の走行車両数、走
行速度、当該道路を走行するのに要する時間(以下、走行所要時間という)の情報が含ま
れている。これらの交通情報の発信元は、例えば、交通情報センタである。
【0023】
交通情報センタは、各リンクを走行する複数の車両から無線送信された当該車両の現在
位置情報、走行速度情報等のプローブ情報を受信し、受信したプローブ情報に基づいて上
記の交通情報を作成する。
【0024】
なお交通情報受信機15は、受信した交通情報の記録の際には、記録した当該交通情報
の記録タイミング(年、月、曜日、日、時刻等)の情報も記録する。
【0025】
地図データ取得部16は、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対し
てデータの読み出しおよび書き込みを行う装置から成る。当該記憶媒体は、制御回路17
が実行するプログラム、ルート案内用の地図データ等を記憶している。
【0026】
地図データは、道路データおよび施設データを有している。道路データは、リンクの位
置情報、種別情報、ノードの位置情報、種別情報、および、ノードとリンクとの接続関係
の情報等を含んでいる。施設データは、施設毎のレコードを複数有しており、各レコード
は、対象とする施設の名称情報、所在位置情報、土地地番情報、施設種類情報等を示すデ
ータを有している。
【0027】
制御回路(コンピュータに相当する)17は、CPU、RAM、ROM、I/O等を有
するマイコンである。CPUは、ROMまたは地図データ取得部16から読み出した車両
用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM、
ROM、および地図データ取得部16から情報を読み出し、RAMおよび(可能であれば
)地図データ取得部16の記憶媒体に対して情報の書き込みを行い、位置検出器11、画
像表示装置12、操作部13、スピーカ14、および交通情報受信機15と信号の授受を
行う。
【0028】
制御回路17がプログラムを実行することによって行う具体的な処理としては、現在位
置特定処理、地図表示処理、案内ルート算出処理、ルート案内処理等がある。
【0029】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング
等の技術を用いて車両の現在位置や向きを特定する処理である。
【0030】
地図表示処理は、車両の現在位置の周辺等の特定の領域の地図を、画像表示装置12に
表示させる処理である。この際、地図表示のために用いる情報は、地図データから取得す
る。
【0031】
案内ルート算出処理は、操作部13からユーザによる目的地の入力を受け付け、現在位
置から当該目的地までの最適な案内ルートを算出する処理である。
【0032】
ルート案内処理は、案内ルート上の右左折交差点等の案内ポイントの手前に自車両が到
達したときに、右折、左折等を指示する案内音声をスピーカ14に出力させ、当該案内ポ
イントの拡大図を画像表示装置12に表示させることで、案内ルートに沿った車両の運転
を案内する処理である。
【0033】
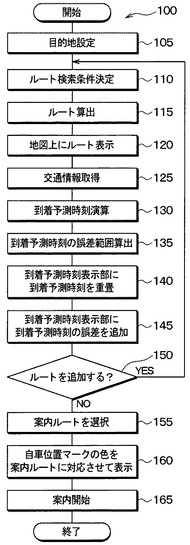
図2に、案内ルート算出処理のために制御回路17が実行するプログラム100のフロ
ーチャートを示す。制御回路17は、案内ルート算出開始のための所定の操作が操作部1
3に対して行われたことに基づいて、このプログラム100の実行を開始し、その実行に
おいて、まずステップ105で、ユーザによる操作部13を用いた目的地の入力を受け付
け、受け付けた入力の内容に従って目的地を設定する。
【0034】
続いてステップ110で、操作部13に対するユーザの選択操作に基づいて、ルート検
索条件を決定する。検索条件の項目としては、例えば、有料道路を優先するか一般道路を
優先するか、距離の短さを優先するか目的地到着時刻を優先するか、受信した交通情報を
ルート算出に反映するか否か、等がある。
【0035】
続いてステップ115では、車両用ナビゲーション装置1の現在位置から目的地までの
最適なルートを算出し、それを候補ルートとする。ここで、最適なルートを特定するため
の条件として、ステップ110で決定した条件を使用する。続いてステップ120では、
画像表示装置12に表示されている地図上に、決定した候補ルートの経路を重畳させる。
【0036】
続いてステップ125では、交通情報受信機15が受信して地図データ取得部16の記
憶媒体に記録された交通情報を読み出す。続いてステップ130では、読み出した交通情
報に基づいて予想到着時刻を算出する。
【0037】
予想到着時刻の算出における交通情報の利用方法は、以下の通りである。すなわち、交
通情報から、算出した候補ルート中の全リンクのそれぞれについて、当該リンクのリアル
タイム交通情報が交通情報中に含まれているかいないかを判定する。
【0038】
リアルタイム交通情報とは、直近の基準時間(例えば30分、1時間等)内における交
通状況を反映した交通情報をいう。ある交通情報がリアルタイム交通情報であるか否かは
、当該交通情報と共に記録された記録タイミングが、現在から基準時間以内の過去である
か否かで判定する。
【0039】
リアルタイム交通情報が存在するリンクについては、当該リンクの交通情報のうち、当
該リアルタイム交通情報のみを用いて、予想到着時刻を決定する。具体的には、当該リン
クについての複数個の(すなわち、複数車両分の)リアルタイム交通情報中から、当該リ
ンクの走行所要時間の情報を抽出する。
【0040】
リアルタイム交通情報がないリンクについては、当該リンクの交通情報(すなわち、リ
アルタイムでない過去の交通情報)の一部または全部を用いて、予想到着時刻を決定する
。一部を用いる方法としては、例えば、現在と同じ曜日の同じ時間帯についての交通情報
のみ用いる方法がある。そして、抽出した当該リンクについての複数個の(すなわち、複
数車両分の)交通情報中から、当該リンクの走行所要時間の情報を抽出する。
【0041】
そして、上記のように抽出された各リンクの走行所要時間を統計処理することで、現時
点で現在位置を出発し、現在位置から目的地まで候補ルートを通行した場合における、目
的地への到着時刻についての確率分布P(T)を作成する。この確率分布P(T)は、時
刻Tを変数とする関数となる。そして制御回路17は、この確率分布P(T)の値がピー
クとなる時刻Tを、予想到着時刻として特定する。
【0042】
続いてステップ135では、算出した確率分布P(T)に基づいて、予想到着時刻の誤
差範囲を決定する。例えば、誤差範囲は、予想到着時刻を中心とし、確率分布P(T)の
標準偏差σの3倍の長さを持つ範囲としてもよい。あるいは、確率分布P(T)がピーク
値の1/2以上となる範囲としてもよい。
【0043】
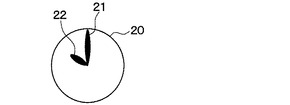
続いてステップ140では、画像表示装置12の地図表示画面の一部(例えば右上隅)
に、予想到着時刻表示用の画像として、アナログ時計画像を表示させる。図3に、予想到
着時刻表示用のアナログ時計画像の一例を示す。
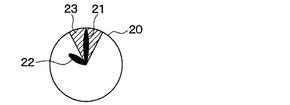
【0044】
アナログ時計画像は、この図3に例示するように、アナログ文字盤20、分針21、時
針22の画像を含んでいる。この分針21、時針22の指し示す時刻は、予想到着時刻に
一致している。
【0045】
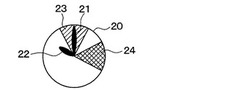
続いてステップ145では、ステップ140で表示させたアナログ時計画像中に、ステ
ップ135で算出した当該予想到着時刻の誤差範囲を表示させる。誤差範囲の表示方法と
しては、図4に例示するように、分針21の周囲に、アナログ文字盤20の他の部分と表
示形態(例えば表示色、模様)を変えた扇形部分23を表示させる方法がある。この扇形
部分23は、当該予想到着時刻の誤差範囲を、分針21の誤差の角度範囲として示してい
る。
【0046】
続いてステップ150では、直前に決定した候補ルートに加え、さらにルートを追加す
るか否かをユーザに問い合わせ、その応答としての入力が操作部13にあった場合、その
入力内容に応じてルートを追加するか否かを判定し、追加する場合ステップ110に処理
を戻し、追加しない場合ステップ155を実行する。
【0047】
ステップ150からステップ110に戻って以降は、ユーザの入力に応じて別のルート
検索条件を設定し(ステップ110)、その条件で別の候補ルートを算出し、この算出し
た候補ルート(以下、対象候補ルートという)について、ステップ120〜145の処理
を実行する。
【0048】
ただし、ステップ140の予想到着時刻の表示処理は実行しない。したがって、ステッ
プ140の予想到着時刻の表示処理は、最初の候補ルートのみについて行い、他の候補ル
ートについては行わないことになる。
【0049】
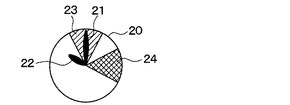
また、ステップ145においては、直前のステップ135で算出した対象候補ルートの
誤差範囲について、図5に示すように、他の候補ルートについての誤差範囲23が表示さ
れているアナログ文字盤20上に、分針21の誤差範囲の角度を示す扇形24の重畳表示
を追加することで、ユーザに提示する。
【0050】
なお、この対象候補ルートの誤差範囲24の配置は、対象候補ルートについて直前のス
テップ130で算出された予想到着時刻に対応する分針の位置を基準としている。例えば
、対象候補ルートの予想到着時刻が10時17分で、誤差範囲が−10分〜+10分の場
合は、誤差範囲24の角度の中心位置は、対象候補ルートの予想到着時刻の分針の位置に
一致する。このようにすることで、誤差範囲を表示するだけで、予想到着時刻がユーザに
とってある程度把握できるようになる。
【0051】
また、対象候補ルートの誤差範囲を示す扇形の色は、それまでに表示されていた誤差範
囲の扇形の色とは異なるようにする。
【0052】
また、ステップ120において今回新たに画像表示装置12に表示された候補ルートは
、それまでに表示されていた候補ルートのいずれとも色を変えることで、ユーザが各ルー
トを容易に識別できるようにしている。
【0053】
また、候補ルートの表示に用いる色と、その候補ルートについての予想到着時刻の誤差
範囲の扇形の表示色とは、同じになるようにする。このようにすることで、候補ルートと
、当該候補ルートについての予想到着時刻の誤差範囲との対応が、視覚的に容易に把握可
能となる。
【0054】
このようなステップ110〜145の処理を、ユーザがルート追加を指定した回数だけ
再実行することで、制御回路17は、異なる条件設定に従って算出された複数の候補ルー
トについての予想到着時刻の誤差範囲のすべてを、同じアナログ文字盤20の当該誤差範
囲に相当する角度を有する扇形として、共に表示させる。さらに、同じ画面上で、複数の
候補ルートが表示される。
【0055】
候補ルートを追加しないと判定した後のステップ155では、表示された候補ルートの
うちから、ユーザに1つだけ選択させるよう促す表示を画像表示装置12またはスピーカ
14に行わせ、それに対応してユーザが操作部13に対して選択操作を行うのを待ち、選
択操作が行われると、その選択操作の内容に従って1つの候補ルートを案内ルートとして
選択する。以下、案内ルートとならなかった候補ルートを別ルートという。
【0056】
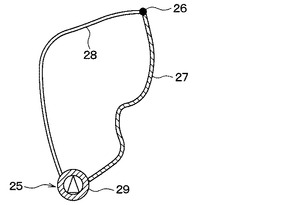
続いてステップ160では、画像表示装置12の表示画面中の候補ルートの表示におい
て、図6に例示するように、目的地26までの候補ルート27、28のうち、ステップ1
55で選択した案内ルート27の色と同じになるよう、現在位置マーク25のリング部2
9の色を変化させる。このようにすることで、表示されている複数のルートのうち案内ル
ートがどれであるかを視覚的に容易に把握できる。
【0057】
続いてステップ165では、ユーザが操作部13に対して案内開始の旨の入力を行うま
で待ち、当該入力があると、上述のルート案内処理を起動し、プログラム100の実行を
終了する。
【0058】
制御回路17は、ルート案内処理においては、図7に示すプログラム200を実行し、
その実行においてまずステップ205で、案内ルートの案内、すなわち、上述したような
、案内ポイントの手前における案内音声出力または交差点拡大図表示を開始する。
【0059】
続いてステップ210で、自車両が目的地に到着する直前であるか否か、すなわち自車
両が目的地に近づいたか否かを判定する。具体的には、例えば、目的地からの距離が1k
mの圏内(第1の基準範囲内の一例に相当する)に入ったときに、自車両が目的地に近づ
いたと判定してもよいし、目的地への予想到着時刻が現在から10分以内となるような圏
内(第1の基準範囲内の一例に相当する)に入ったときに、自車両が目的地に近づいたと
判定してもよい。自車両が目的地に近づいたと判定すると、続いて図8に示すプログラム
300を実行し、近づいていないと判定すると、続いてステップ215を実行する。
【0060】
ステップ215では、自車両が現在の案内ルートを外れたか否かを判定し、外れた場合
続いてステップ242を実行し、外れていない場合続いてステップ220を実行する。
【0061】
ステップ220では、案内ルート上のあらかじめ定められた再探索ポイントを通過した
か否かを判定する。所定の再探索ポイントは、例えば、案内ルートに沿って基準距離(例
えば1km)毎に設けてもよいし、1つの再探索ポイントから案内ルートに沿って基準距
離(例えば1km)を超えた直後の交差点を次の再探索ポイントにするように設けてもよ
い。あるいは、後述するステップ225の別ルート算出のために必要な処理時間と、その
処理時間の間に車両が走行する距離とをあらかじめ定めておき、案内ルートに沿って当該
走行距離毎に再探索ポイントを設けてもよい。当該再探索ポイントを通過したと判定した
場合は続いてステップ225を実行し、通過しないと判定した場合は再度ステップ210
を実行する。
【0062】
ステップ225では、図2のプログラム100の実行時において目的地以外の候補ルー
トの算出に用いた複数の検索条件(ステップ110参照)を使用して、次の探索ポイント
から目的地までの新たなルートを、検索条件のそれぞれについて算出する。これら算出さ
れたルートを別ルートという。
【0063】
続いてステップ230では、それまでの候補ルートの表示を地図上から消去し、新たに
算出した別ルートを地図に重畳表示させる。なお、これら新たな別ルートの表示色は、案
内ルートとは異なるようにし、かつ、新たな別ルートが複数ある場合は、それらの間でも
互いに異なるようにする。
【0064】
続いてステップ235では、案内ルートおよび新たに算出した別ルートのそれぞれにつ
いて、予想到着時刻および予想到着時刻の誤差範囲を算出する。算出方法は、図2のステ
ップ130、135と同じ方法を用いる。
【0065】
続いてステップ240では、直前のステップ235で算出した誤差範囲を、アナログ時
計の表示に反映させる。
【0066】
具体的には、それまでのアナログ時計の表示に代えて、案内経路について新たに算出し
た予想到着時刻および誤差範囲を、図2のステップ140、145に示したように、それ
ぞれ時計の針(時針、分針)および分針の誤差範囲の角度を有する扇形で、案内ルートお
よび新たに算出した別ルートの表示画面と同じ表示画面に表示させる。さらに、新たな別
ルートについて新たに算出した予想到着時刻および誤差範囲を、図2のステップ140、
145に示したように、それぞれ時計の針(時針、分針)および分針の誤差範囲の角度を
有する扇形で、案内ルートおよび新たに算出した別ルートの表示画面と同じ表示画面に表
示させる。
【0067】
なお、案内ルートの誤差範囲の表示色は、案内ルートの表示色と同じにし、また、別ル
ートの誤差範囲の表示色は、同じ別ルートの表示色と同じにする。ステップ240の後、
再度ステップ210を実行する。
【0068】
また、案内ルートを外れたと判定した後のステップ242では、自車両がその時点にお
ける別ルート上を走行しているか否かを判定し、走行していれば続いてステップ245を
実行し、案内経路でも別ルートでもない道路を走行している場合続いてステップ255を
実行する。
【0069】
ステップ245では、当該走行中の別ルートを、それまでの案内ルートに代わる新たな
案内ルートとする。続いてステップ250では、現在位置マーク25のリング部29の色
を、当該新たな案内ルートの色に変更する。なおステップ250では、アナログ時計の表
示においては、分針および短針の位置を、新たな案内ルートの予想到着時刻に合わせるよ
うになっていてもよい。ステップ250の後、再度ステップ210を実行する。
【0070】
案内経路でも別ルートでもない道路に入った後のステップ255では、図2のプログラ
ム100の実行時において案内ルートの算出に用いた検索条件(ステップ110参照)を
使用して、現在位置から目的地までの新たなルートを算出し、算出したルートを案内ルー
トとする。続いてステップ260では、ステップ225と同じ方法で1つまたは複数の別
ルートを算出する。
【0071】
続いてステップ265では、ステップ255および260で算出した新たな案内ルート
および新たな別ルートを、それまでのルート表示に代えて、地図に重畳表示させる。この
とき、案内ルートおよび新たな別ルートのそれぞれの表示色としては、互いに異なる色を
用いる。
【0072】
続いてステップ270では、ステップ235と同じ方法で、新たな案内ルートおよび新
たに算出した別ルートのそれぞれについて、予想到着時刻および予想到着時刻の誤差範囲
を算出する。続いてステップ275では、ステップ240と同じ方法で、直前のステップ
270で算出した誤差範囲を、アナログ時計の表示に反映させる。
【0073】
続いてステップ280では、現在位置マーク25のリング部29の色を、当該新たな案
内ルートの色に変更する。ステップ280に続いてはステップ210を再度実行する。
【0074】
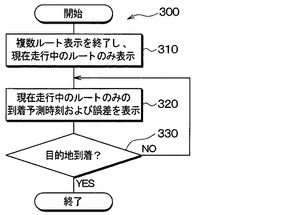
車両が目的地に近接したと判定した場合に実行される図8のプログラム300において
、制御回路17は、まずステップ310で、別ルートの表示を地図中から消去し、現在自
車両が走行中の案内ルートについてのみ、ルートの重畳表示を行う。
【0075】
続いてステップ320では、アナログ時計表示において、現在走行中の案内ルートのみ
について、予想到着時刻および誤差範囲を算出して表示させ、それ以外の別ルートの予想
到着時刻および誤差範囲の表示があれば、それを消去する。
【0076】
そして制御回路17は、続くステップ330で、目的地に自車両が到着したか否かを判
定し、到着したらプログラム300の実行を終了し、到着していない場合は、再度ステッ
プ310を実行する。
【0077】
以上のようなプログラム200およびプログラム300を実行することで、制御回路1
7は、自車両が目的地に近接したと判定する前の段階においては(ステップ210→NO
参照)、案内ルート上を継続して走行している間は(ステップ215→NO参照)、返し
案内経路以外の別ルートを所定の間隔で繰り返し算出し(ステップ225参照)、算出し
た1つまたは複数の別ルートを、案内ルートと共に、画像表示装置12の表示画面中の地
図上に重畳表示させ(ステップ230参照)、更に交通情報に基づいて別ルートおよび案
内ルートのそれぞれについて予想到着時刻および誤差範囲を算出し(ステップ235参照
)、更に、算出した案内ルートおよび別ルートの誤差範囲のそれぞれを、別ルートおよび
案内ルートと同じ画面中に、アナログ時計のアナログ文字盤20中の分針の角度幅を示す
扇形として、表示する(ステップ240参照)。
【0078】
また制御回路17は、自車両が目的地に近接したと判定する前の段階において(ステッ
プ210→NO参照)、自車両が案内経路を外れて(ステップ215→YES参照)表示
中の別ルートに入った場合(ステップ242→YES参照)、その入った別ルートを案内
ルートに設定し(ステップ245参照)、現在位置マーク25のリング部29の表示色を
当該新案内ルートの表示色と同じになるように変更する(ステップ250参照)。
【0079】
また制御回路17は、自車両が目的地に近接したと判定する前の段階において(ステッ
プ210→NO参照)、自車両が案内経路を外れて(ステップ215→YES参照)表示
中の別ルート以外の道路に入った場合(ステップ242→NO参照)、案内ルートの再探
索(ステップ255)および別ルートの再探索(ステップ260参照)を行い、算出され
た案内ルートおよび別ルートを地図上に重畳表示させ(ステップ265参照)、交通情報
に基づいて当該案内ルートおよび別ルートの予想到着時刻および誤差範囲を算出し(ステ
ップ270参照)、更に、算出した案内ルートおよび別ルートの誤差範囲のそれぞれを、
別ルートおよび案内ルートと同じ画面中に、アナログ時計のアナログ文字盤20中の分針
の角度幅を示す扇形として、表示する(ステップ280参照)。
【0080】
また制御回路17は、自車両が目的地に近接したと判定した後は(ステップ210→Y
ES参照)、すべての別ルートの表示、および、すべての別ルートの誤差範囲の表示につ
いて、表示をやめ、ルートとしては案内ルートのみ表示を継続し(ステップ310参照)
、予想到着時刻の誤差範囲としては、案内ルートの誤差範囲についてのみ表示を継続する
(ステップ320参照)。
【0081】
以上説明した通り、車両用ナビゲーション装置1は、目的地までの複数のルートについ
て、当該目的地までの予想到着時刻および当該予想到着時刻の誤差範囲を算出し、当該複
数のルートのそれぞれについて算出された誤差範囲を、共に画像表示装置12に表示させ
る。
【0082】
このように、複数のルートの予想到着時刻の誤差範囲が共に表示されるので、ユーザは
、それらを直感的に比較することができる。例えば、どのルートの予想到着時刻の誤差幅
が少ないか(すなわち、予想到着時刻の信頼度が高いか)等の比較を一目で判別すること
ができる。すなわち、従来よりも良好なルート選択性をユーザに提供することができる。
【0083】
また、車両用ナビゲーション装置1は、ユーザの現在位置が目的地に近接したことに基
づいて、当該複数のルートのうち、ユーザが所在する案内ルートについて算出された誤差
範囲のみを、画像表示装置12に表示させるようになっていてもよい。
【0084】
ナビゲーション装置のユーザがある程度目的地に近づくと、複数のルートの予想到着時
刻および誤差範囲の差が、ユーザにとって問題とならない程度に小さくなることが多い。
したがって、上記のようにユーザが目的地に近づくことに基づいて、現在通行中のルート
のみを表示することで、ユーザにとって不要となった可能性の高い情報(すなわち、他の
ルートの誤差範囲の情報)を表示しなくなり、ユーザにとって必要でありながらシンプル
な情報を提供する表示が実現する。
【0085】
(第2実施形態)
以下、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるの
は、制御回路17が、図7のプログラム200の実行において、ステップ210で目的地
に近づいたと判定した後の処理の内容である。以下、本実施形態が第1実施形態と異なる
部分について説明する。
【0086】
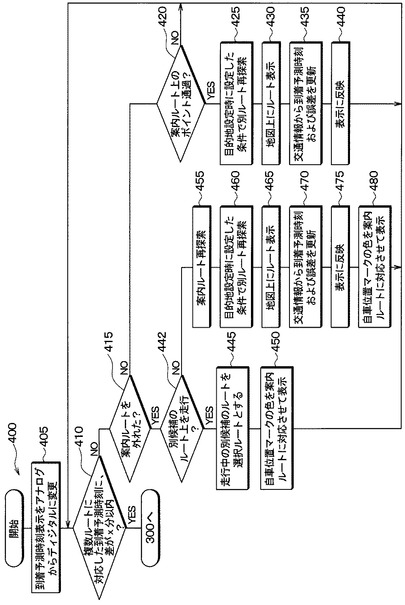
本実施形態の制御回路17は、図7のプログラム200の実行において、ステップ21
0で目的地に近づいたと判定した後、続いて図9に示すプログラム400を実行し、その
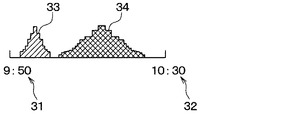
実行においてまずステップ405で、予想到着時刻および誤差の表示の形態を、アナログ
時計の形態から可変リニアグラフ(ディジタル時計)の形態に切り替える。図10に、可
変リニアグラフ形態による予想到着時刻および誤差の表示の一例を示す。
【0087】
この可変リニアグラフ表示においては、画像表示装置12の表示画面中で縦横の長さが
固定された固定範囲に、第1時刻(図10の例では9時50分)から第2時刻(図10の
例では10時30分)までの時間Tを定義域(図10の例では横軸座標)とするグラフ画
像(誤差範囲画像の一例に相当する)を表示する。このグラフの値域(図10の例では縦
軸座標)は、到着時刻の確率分布P(T)である。
【0088】
制御回路17は、この可変リニアグラフ表示において、案内ルートおよび別ルートそれ
ぞれについて算出した到着時刻の確率分布P(T)のグラフを、上述の固定範囲内に表示
させる。なお、各ルートのグラフの表示色は、互いに異なるようにし、かつ、同じルート
の地図上のルート表示の色と同じにする。
【0089】
なお、制御回路17は、可変リニアグラフ表示の両端の時刻である第1時刻と第2時刻
を、案内ルートおよび別ルートの確率分布P(T)に応じて変化させる。具体的には、表
示対象のルートのそれぞれについて、確率分布P(T)が所定値(例えば0.05)以上
となる時刻範囲を特定し、それら複数の時刻範囲のいずれかに属する時刻で最も早い時刻
と最も遅い時刻を含むように、第1時刻と第2時刻を設定する。更に、第1時刻から第2
時刻までの時間間隔に対する、上記最も早い時刻から最も遅い時刻までの時間間隔の比が
、所定比(例えば1:0.9)となるように、第1時刻および第2時刻を決定する。
【0090】
このようにすることで、表示対象の各ルートの誤差範囲が小さくなるほど、可変リニア
グラフ表示の定義域(すなわち、上述の固定範囲内の横軸方向)においては、単位時間当
りに割くグラフ表示画像の長さが減少することになる。
【0091】
アナログ時計の針の角度範囲で各ルートの誤差範囲を表示する方法は、ユーザが誤差範
囲の時間幅を把握し易いという点で有益である。しかし、ユーザがある程度目的地に近づ
くと、誤差範囲が減少し、その結果表示する角度が非常に狭くなるので、逆にユーザにと
って見難くなってしまう可能性がある。このように、表示角度の先鋭化によって見難くな
るという現象は、複数のルートの誤差範囲の表示が重なってしまったときに更に顕著とな
る。
【0092】
そこで、上記のように、ユーザの現在位置が当該目的地から当該第2の基準範囲内に入
ったことに基づいて、各誤差範囲を表示画像中の誤差範囲画像の長さで表すと共に、単位
時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させれば、ユ
ーザが目的地に近づいて誤差範囲が減少しても、誤差範囲の表示が小さくなり過ぎて見難
くなることがない。
【0093】
ステップ405に続くステップ410においては、現在の案内ルートおよび別ルートの
予想到着時刻のうち、最も早いものと最も遅いものとの時間差が所定のX分(Xは、例え
ば5から10までのいずれか)以内であるか否かを判定し、X分以内であれば続いて図8
のプログラム300を実行し、X分より大きければ続いてステップ415を実行する。
【0094】
なお、ステップ415、420、425、430、435、445、450、455、
460、465、470、480の処理内容は、それぞれ図7のプログラム200のステ
ップ215、220、225、230、235、245、250、255、260、26
5、270、280の処理と同じである。
【0095】
また、ステップ440、475の処理内容は、ステップ240、275の処理内容中の
アナログ時計表示を可変リニアグラフ表示に置き換えたものと同じである。また図8のス
テップ320の処理内容は、第1実施形態の処理内容中のアナログ時計表示を可変リニア
グラフ表示に置き換えたものと同じである。
【0096】
以上のようなプログラム300およびプログラム400を実行することで、自車両が目
的地に近接したと判定した後の制御回路17は、表示中の複数ルートの予想到着時刻群が
所定範囲内に近接する前の段階においては(ステップ410→NO参照)、案内ルート上
を継続して走行している間は(ステップ415→NO参照)、返し案内経路以外の別ルー
トを所定の間隔で繰り返し算出し(ステップ425参照)、算出した1つまたは複数の別
ルートを、案内ルートと共に、画像表示装置12の表示画面中の地図上に重畳表示させ(
ステップ430参照)、更に交通情報に基づいて別ルートおよび案内ルートのそれぞれに
ついて到着時刻の確率分布P(T)、予想到着時刻および誤差範囲を算出し(ステップ4
35参照)、更に、算出した案内ルートおよび別ルートの到着時刻の確率分布P(T)の
それぞれを、別ルートおよび案内ルートと同じ画面中に、可変リニアグラフとして、表示
する(ステップ440参照)。
【0097】
また制御回路17は、表示中の複数ルートの予想到着時刻群が所定範囲内に近接する前
の段階においては(ステップ410→NO参照)、自車両が案内経路を外れて(ステップ
415→YES参照)表示中の別ルート以外の道路に入った場合(ステップ440→NO
参照)、案内ルートの再探索(ステップ455)および別ルートの再探索(ステップ46
0参照)を行い、算出された案内ルートおよび別ルートを地図上に重畳表示させ(ステッ
プ465参照)、交通情報に基づいて当該案内ルートおよび別ルートの到着時刻の確率分
布P(T)、予想到着時刻および誤差範囲を算出し(ステップ470参照)、更に、算出
した到着時刻の確率分布P(T)のそれぞれを、可変リニアグラフとして、表示する(ス
テップ480参照)。
【0098】
また制御回路17は、表示中の複数ルートの予想到着時刻群が所定範囲内に近接したと
判定した後は(ステップ410→YES参照)、すべての別ルートの表示、および、すべ
ての別ルートの誤差範囲の表示について、表示をやめ、ルートとしては案内ルートのみ表
示を継続し(ステップ310参照)、予想到着時刻の確立分布P(T)としては、案内ル
ートの誤差範囲についてのみ表示を継続する(ステップ320参照)。
【0099】
このように、目的地への近接度合いに応じて誤差範囲の表示形態を切り替えることで、
目的地への近接度合いによって変化するユーザの見易さに対する要求に対応することがで
きる。
【0100】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限
定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含す
るものである。
【0101】
例えば、第2実施形態においては、現在の案内ルートおよび別ルートの予想到着時刻の
うち、最も早いものと最も遅いものとの時間差がX分以内になったときに、別ルートおよ
び別ルートの誤差範囲の表示を一度にすべて消去するようになっている。
【0102】
しかし、例えば、別ルートの個々について、案内ルートの予想到着時刻と当該別ルート
の予想到着時刻の差が基準時間(例えば5分)未満となった場合に、当該別ルートおよび
当該別ルートの誤差範囲の表示を消去していくようになっていてもよい。
【0103】
また、上記実施形態においては、車両用ナビゲーション装置1は、交通情報として、他
の車両の走行履歴の情報を用いているが、車両用ナビゲーション装置は、自車両の走行履
歴(走行したリンク、走行速度、走行に要した時間等)を交通情報として用いるようにな
っていてもよい。
【0104】
また、上記実施形態において車両用ナビゲーション装置1は、ルートの予想到着時刻お
よび誤差範囲を算出するために、ルート上の各リンクについて、リアルタイム交通情報が
ある場合はリアルタイム交通情報のみを用いて過去の交通情報は用いないようになってい
る。しかし、リアルタイム交通情報がある場合でも、リアルタイム交通情報と過去の交通
情報とを共に用いるようになっていてもよい。
【0105】
また、交通情報等の、更新が必要なデータは、地図データ取得部16の記憶媒体に限ら
ず、他の、車両用ナビゲーション装置1の主電源の供給が停止してもデータを保持し続け
ることができる記憶媒体(例えばフラッシュメモリ、EEPROM、バックアップRAM
)に記憶されるようになっていてもよい。その場合、地図データ取得部16の記憶媒体は
、HDD等の書き込み可能な記憶媒体である必要はなく、DVD、CD−ROM等の書き
込み不可能な記憶媒体であってもよい。
【0106】
また、上記の実施形態において、制御回路17がプログラムを実行することで実現して
いる各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムするこ
とが可能なFPGA)を用いて実現するようになっていてもよい。
【0107】
また、上記実施形態においては、ナビゲーション装置は車載タイプのものであるが、ナ
ビゲーション装置は、人が持ち運びできるタイプのものであってもよい。例えば、ナビゲ
ーション装置の機能を有する携帯電話機やPDAも、本発明のナビゲーション装置に該当
する。
【符号の説明】
【0108】
1 車両用ナビゲーション装置
12 画像表示装置
15 交通情報受信機
20 アナログ文字盤
21 分針
22 時針
23、24 誤差範囲
25 現在位置マーク
26 目的地
27 案内ルート
28 他のルート
29 リング部
31、32 境界時刻
33、34 確率分布グラフ
【技術分野】
【0001】
本発明は、ナビゲーション装置およびナビゲーション装置用のプログラムに関するもの
である。
【背景技術】
【0002】
従来、目的地までのルートを案内するナビゲーション装置おいて、目的地までの予想到
着時刻および当該予想到着時刻の誤差範囲を、時計の針の角度範囲で表す技術が知られて
いる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−47126号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の技術は、案内ルートただ1つのみについて、予想到着時刻および誤差範
囲の表示を行うようになっている。すなわち、ただ単に現在走行中のルートに対する予想
到着時刻の信頼度情報を表示しているに過ぎない。したがって、複数のルートについての
予想到着時刻の誤差範囲を、ユーザが直感的に比較することができるように表示すること
はできない。
【0005】
本発明は上記点に鑑み、ナビゲーション装置において、複数のルートについての予想到
着時刻の誤差範囲を、ユーザが直感的に比較することができるような表示を実現すること
を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための請求項1に記載の発明は、ナビゲーション装置が、目的地ま
での複数のルートについて、当該目的地までの予想到着時刻および当該予想到着時刻の誤
差範囲を算出し、当該複数のルートのそれぞれについて算出された誤差範囲を、共に表示
装置(12)に表示させることである。より具体的には、請求項1に記載の発明は、目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、470)と、前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)と、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)と、を備えたナビゲーション装置である。
【0007】
このように、複数のルートの予想到着時刻の誤差範囲が共に表示されるので、ユーザは
、それらを直感的に比較することができる。例えば、どのルートの予想到着時刻の誤差幅
が少ないか(すなわち、予想到着時刻の信頼度が高いか)等の比較を一目で判別すること
ができる。すなわち、従来よりも良好なルート選択性をユーザに提供することができる。
【0008】
また、請求項2に記載の発明は、前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項1に記載のナビゲーション装置である。また、ナビゲーション装置は、ユーザの現在位置が目的地から第1の基準範囲内に入ったことに基づいて、当該複数のルートのうち、ユーザが所在するルートについて算出された誤差範囲のみを表示装置に表示させるようになっていてもよい。
【0009】
ナビゲーション装置のユーザがある程度目的地に近づくと、複数のルートの予想到着時
刻および誤差範囲の差が、ユーザにとって問題とならない程度に小さくなることが多い。
したがって、上記のようにユーザが目的地に近づくことに基づいて、現在通行中のルート
のみを表示することで、ユーザにとって不要となった可能性の高い情報(すなわち、他の
ルートの誤差範囲の情報)を表示しなくなり、ユーザにとって必要でありながらシンプル
な情報を提供する表示が実現する。
【0010】
また、ナビゲーション装置は、表示装置を制御することによって、ユーザの現在位置が目的地から第2の基準範囲外にあることに基づいて、複数のルートのそれぞれについて算出された誤差範囲を、アナログ時計の針の角度範囲で表し、また、ユーザの現在位置が目的地から第2の基準範囲内に入ったことに基づいて、当該複数のルートのそれぞれについて算出された誤差範囲を、表示画像中の誤差範囲画像の長さで表すと共に、単位時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させるようになっていてもよい。
【0011】
アナログ時計の針の角度範囲で各ルートの誤差範囲を表示する方法は、ユーザが誤差範
囲の時間幅を把握し易いという点で有益である。しかし、ユーザがある程度目的地に近づ
くと、誤差範囲が減少し、その結果表示する角度が非常に狭くなるので、逆にユーザにと
って見難くなってしまう可能性がある。このような、表示角度の先鋭化によって見難くな
るという現象は、複数のルートの誤差範囲の表示が重なってしまったときに更に顕著とな
る。
【0012】
そこで、上記のように、ユーザの現在位置が当該目的地から当該第2の基準範囲内に入
ったことに基づいて、各誤差範囲を表示画像中の誤差範囲画像の長さで表すと共に、単位
時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させれば、ユ
ーザが目的地に近づいて誤差範囲が減少しても、誤差範囲の表示が小さくなり過ぎて見難
くなることがない。
【0013】
このように、目的地への近接度合いに応じて誤差範囲の表示形態を切り替えることで、
目的地への近接度合いによって変化するユーザの見易さに対する要求に対応することがで
きる。
【0014】
また、請求項3、4に記載のように、請求項1、2の発明の特徴は、プログラムとしても捉えることができる。
【0015】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載され
た用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すも
のである。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用ナビゲーション装置1の構成を示す図である。
【図2】制御回路17がルート算出処理のために実行するプログラム100のフローチャートである。
【図3】予想到着時刻表示用のアナログ時計画像の一例を示す。
【図4】予想到着時刻表示用のアナログ時計画像に予想到着時刻の誤差範囲23を重畳した図である。
【図5】予想到着時刻表示用のアナログ時計画像に予想到着時刻の誤差範囲24を更に重畳した図である。
【図6】現在位置マーク25から目的地26までの候補ルート27、28を示す図である。
【図7】制御回路17がルート案内処理のために実行するプログラム200のフローチャートである。
【図8】制御回路17が実行するプログラム300のフローチャートである。
【図9】第2実施形態において制御回路17が実行するプログラム400のフローチャートである。
【図10】可変リニアグラフ形態による予想到着時刻および誤差の表示例である。
【発明を実施するための形態】
【0017】
(第1実施形態)
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る車両用ナビ
ゲーション装置1の構成を示す。この車両用ナビゲーション装置1は、位置検出器11、
画像表示装置12、操作部13、スピーカ14、交通情報受信機15、地図データ取得部
16、および制御回路17を有している。
【0018】
位置検出器11は、いずれも周知の図示しない加速度センサ、地磁気センサ、ジャイロ
センサ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々
の性質に基づいた、車両の現在位置、向き、および速度を特定するための情報を制御回路
17に出力する。
【0019】
画像表示装置12は、制御回路17から出力された映像信号に基づいた映像をユーザに
表示する。表示映像としては、例えば現在地を中心とする地図等がある。
【0020】
操作部13は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、
画像表示装置12の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユー
ザによるメカニカルスイッチの押下、タッチパネルのタッチに基づいた信号を制御回路1
7に出力する。
【0021】
交通情報受信機15は、FMラジオ放送局または道路沿いに設置された路上機から繰り
返し(例えば1分毎に)無線送信された交通情報等を繰り返し受信して地図データ取得部
16等の記憶媒体に蓄積する装置である。
【0022】
受信する交通情報は、その交通情報の送信の時点における、リンク毎の走行車両数、走
行速度、当該道路を走行するのに要する時間(以下、走行所要時間という)の情報が含ま
れている。これらの交通情報の発信元は、例えば、交通情報センタである。
【0023】
交通情報センタは、各リンクを走行する複数の車両から無線送信された当該車両の現在
位置情報、走行速度情報等のプローブ情報を受信し、受信したプローブ情報に基づいて上
記の交通情報を作成する。
【0024】
なお交通情報受信機15は、受信した交通情報の記録の際には、記録した当該交通情報
の記録タイミング(年、月、曜日、日、時刻等)の情報も記録する。
【0025】
地図データ取得部16は、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対し
てデータの読み出しおよび書き込みを行う装置から成る。当該記憶媒体は、制御回路17
が実行するプログラム、ルート案内用の地図データ等を記憶している。
【0026】
地図データは、道路データおよび施設データを有している。道路データは、リンクの位
置情報、種別情報、ノードの位置情報、種別情報、および、ノードとリンクとの接続関係
の情報等を含んでいる。施設データは、施設毎のレコードを複数有しており、各レコード
は、対象とする施設の名称情報、所在位置情報、土地地番情報、施設種類情報等を示すデ
ータを有している。
【0027】
制御回路(コンピュータに相当する)17は、CPU、RAM、ROM、I/O等を有
するマイコンである。CPUは、ROMまたは地図データ取得部16から読み出した車両
用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM、
ROM、および地図データ取得部16から情報を読み出し、RAMおよび(可能であれば
)地図データ取得部16の記憶媒体に対して情報の書き込みを行い、位置検出器11、画
像表示装置12、操作部13、スピーカ14、および交通情報受信機15と信号の授受を
行う。
【0028】
制御回路17がプログラムを実行することによって行う具体的な処理としては、現在位
置特定処理、地図表示処理、案内ルート算出処理、ルート案内処理等がある。
【0029】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング
等の技術を用いて車両の現在位置や向きを特定する処理である。
【0030】
地図表示処理は、車両の現在位置の周辺等の特定の領域の地図を、画像表示装置12に
表示させる処理である。この際、地図表示のために用いる情報は、地図データから取得す
る。
【0031】
案内ルート算出処理は、操作部13からユーザによる目的地の入力を受け付け、現在位
置から当該目的地までの最適な案内ルートを算出する処理である。
【0032】
ルート案内処理は、案内ルート上の右左折交差点等の案内ポイントの手前に自車両が到
達したときに、右折、左折等を指示する案内音声をスピーカ14に出力させ、当該案内ポ
イントの拡大図を画像表示装置12に表示させることで、案内ルートに沿った車両の運転
を案内する処理である。
【0033】
図2に、案内ルート算出処理のために制御回路17が実行するプログラム100のフロ
ーチャートを示す。制御回路17は、案内ルート算出開始のための所定の操作が操作部1
3に対して行われたことに基づいて、このプログラム100の実行を開始し、その実行に
おいて、まずステップ105で、ユーザによる操作部13を用いた目的地の入力を受け付
け、受け付けた入力の内容に従って目的地を設定する。
【0034】
続いてステップ110で、操作部13に対するユーザの選択操作に基づいて、ルート検
索条件を決定する。検索条件の項目としては、例えば、有料道路を優先するか一般道路を
優先するか、距離の短さを優先するか目的地到着時刻を優先するか、受信した交通情報を
ルート算出に反映するか否か、等がある。
【0035】
続いてステップ115では、車両用ナビゲーション装置1の現在位置から目的地までの
最適なルートを算出し、それを候補ルートとする。ここで、最適なルートを特定するため
の条件として、ステップ110で決定した条件を使用する。続いてステップ120では、
画像表示装置12に表示されている地図上に、決定した候補ルートの経路を重畳させる。
【0036】
続いてステップ125では、交通情報受信機15が受信して地図データ取得部16の記
憶媒体に記録された交通情報を読み出す。続いてステップ130では、読み出した交通情
報に基づいて予想到着時刻を算出する。
【0037】
予想到着時刻の算出における交通情報の利用方法は、以下の通りである。すなわち、交
通情報から、算出した候補ルート中の全リンクのそれぞれについて、当該リンクのリアル
タイム交通情報が交通情報中に含まれているかいないかを判定する。
【0038】
リアルタイム交通情報とは、直近の基準時間(例えば30分、1時間等)内における交
通状況を反映した交通情報をいう。ある交通情報がリアルタイム交通情報であるか否かは
、当該交通情報と共に記録された記録タイミングが、現在から基準時間以内の過去である
か否かで判定する。
【0039】
リアルタイム交通情報が存在するリンクについては、当該リンクの交通情報のうち、当
該リアルタイム交通情報のみを用いて、予想到着時刻を決定する。具体的には、当該リン
クについての複数個の(すなわち、複数車両分の)リアルタイム交通情報中から、当該リ
ンクの走行所要時間の情報を抽出する。
【0040】
リアルタイム交通情報がないリンクについては、当該リンクの交通情報(すなわち、リ
アルタイムでない過去の交通情報)の一部または全部を用いて、予想到着時刻を決定する
。一部を用いる方法としては、例えば、現在と同じ曜日の同じ時間帯についての交通情報
のみ用いる方法がある。そして、抽出した当該リンクについての複数個の(すなわち、複
数車両分の)交通情報中から、当該リンクの走行所要時間の情報を抽出する。
【0041】
そして、上記のように抽出された各リンクの走行所要時間を統計処理することで、現時
点で現在位置を出発し、現在位置から目的地まで候補ルートを通行した場合における、目
的地への到着時刻についての確率分布P(T)を作成する。この確率分布P(T)は、時
刻Tを変数とする関数となる。そして制御回路17は、この確率分布P(T)の値がピー
クとなる時刻Tを、予想到着時刻として特定する。
【0042】
続いてステップ135では、算出した確率分布P(T)に基づいて、予想到着時刻の誤
差範囲を決定する。例えば、誤差範囲は、予想到着時刻を中心とし、確率分布P(T)の
標準偏差σの3倍の長さを持つ範囲としてもよい。あるいは、確率分布P(T)がピーク
値の1/2以上となる範囲としてもよい。
【0043】
続いてステップ140では、画像表示装置12の地図表示画面の一部(例えば右上隅)
に、予想到着時刻表示用の画像として、アナログ時計画像を表示させる。図3に、予想到
着時刻表示用のアナログ時計画像の一例を示す。
【0044】
アナログ時計画像は、この図3に例示するように、アナログ文字盤20、分針21、時
針22の画像を含んでいる。この分針21、時針22の指し示す時刻は、予想到着時刻に
一致している。
【0045】
続いてステップ145では、ステップ140で表示させたアナログ時計画像中に、ステ
ップ135で算出した当該予想到着時刻の誤差範囲を表示させる。誤差範囲の表示方法と
しては、図4に例示するように、分針21の周囲に、アナログ文字盤20の他の部分と表
示形態(例えば表示色、模様)を変えた扇形部分23を表示させる方法がある。この扇形
部分23は、当該予想到着時刻の誤差範囲を、分針21の誤差の角度範囲として示してい
る。
【0046】
続いてステップ150では、直前に決定した候補ルートに加え、さらにルートを追加す
るか否かをユーザに問い合わせ、その応答としての入力が操作部13にあった場合、その
入力内容に応じてルートを追加するか否かを判定し、追加する場合ステップ110に処理
を戻し、追加しない場合ステップ155を実行する。
【0047】
ステップ150からステップ110に戻って以降は、ユーザの入力に応じて別のルート
検索条件を設定し(ステップ110)、その条件で別の候補ルートを算出し、この算出し
た候補ルート(以下、対象候補ルートという)について、ステップ120〜145の処理
を実行する。
【0048】
ただし、ステップ140の予想到着時刻の表示処理は実行しない。したがって、ステッ
プ140の予想到着時刻の表示処理は、最初の候補ルートのみについて行い、他の候補ル
ートについては行わないことになる。
【0049】
また、ステップ145においては、直前のステップ135で算出した対象候補ルートの
誤差範囲について、図5に示すように、他の候補ルートについての誤差範囲23が表示さ
れているアナログ文字盤20上に、分針21の誤差範囲の角度を示す扇形24の重畳表示
を追加することで、ユーザに提示する。
【0050】
なお、この対象候補ルートの誤差範囲24の配置は、対象候補ルートについて直前のス
テップ130で算出された予想到着時刻に対応する分針の位置を基準としている。例えば
、対象候補ルートの予想到着時刻が10時17分で、誤差範囲が−10分〜+10分の場
合は、誤差範囲24の角度の中心位置は、対象候補ルートの予想到着時刻の分針の位置に
一致する。このようにすることで、誤差範囲を表示するだけで、予想到着時刻がユーザに
とってある程度把握できるようになる。
【0051】
また、対象候補ルートの誤差範囲を示す扇形の色は、それまでに表示されていた誤差範
囲の扇形の色とは異なるようにする。
【0052】
また、ステップ120において今回新たに画像表示装置12に表示された候補ルートは
、それまでに表示されていた候補ルートのいずれとも色を変えることで、ユーザが各ルー
トを容易に識別できるようにしている。
【0053】
また、候補ルートの表示に用いる色と、その候補ルートについての予想到着時刻の誤差
範囲の扇形の表示色とは、同じになるようにする。このようにすることで、候補ルートと
、当該候補ルートについての予想到着時刻の誤差範囲との対応が、視覚的に容易に把握可
能となる。
【0054】
このようなステップ110〜145の処理を、ユーザがルート追加を指定した回数だけ
再実行することで、制御回路17は、異なる条件設定に従って算出された複数の候補ルー
トについての予想到着時刻の誤差範囲のすべてを、同じアナログ文字盤20の当該誤差範
囲に相当する角度を有する扇形として、共に表示させる。さらに、同じ画面上で、複数の
候補ルートが表示される。
【0055】
候補ルートを追加しないと判定した後のステップ155では、表示された候補ルートの
うちから、ユーザに1つだけ選択させるよう促す表示を画像表示装置12またはスピーカ
14に行わせ、それに対応してユーザが操作部13に対して選択操作を行うのを待ち、選
択操作が行われると、その選択操作の内容に従って1つの候補ルートを案内ルートとして
選択する。以下、案内ルートとならなかった候補ルートを別ルートという。
【0056】
続いてステップ160では、画像表示装置12の表示画面中の候補ルートの表示におい
て、図6に例示するように、目的地26までの候補ルート27、28のうち、ステップ1
55で選択した案内ルート27の色と同じになるよう、現在位置マーク25のリング部2
9の色を変化させる。このようにすることで、表示されている複数のルートのうち案内ル
ートがどれであるかを視覚的に容易に把握できる。
【0057】
続いてステップ165では、ユーザが操作部13に対して案内開始の旨の入力を行うま
で待ち、当該入力があると、上述のルート案内処理を起動し、プログラム100の実行を
終了する。
【0058】
制御回路17は、ルート案内処理においては、図7に示すプログラム200を実行し、
その実行においてまずステップ205で、案内ルートの案内、すなわち、上述したような
、案内ポイントの手前における案内音声出力または交差点拡大図表示を開始する。
【0059】
続いてステップ210で、自車両が目的地に到着する直前であるか否か、すなわち自車
両が目的地に近づいたか否かを判定する。具体的には、例えば、目的地からの距離が1k
mの圏内(第1の基準範囲内の一例に相当する)に入ったときに、自車両が目的地に近づ
いたと判定してもよいし、目的地への予想到着時刻が現在から10分以内となるような圏
内(第1の基準範囲内の一例に相当する)に入ったときに、自車両が目的地に近づいたと
判定してもよい。自車両が目的地に近づいたと判定すると、続いて図8に示すプログラム
300を実行し、近づいていないと判定すると、続いてステップ215を実行する。
【0060】
ステップ215では、自車両が現在の案内ルートを外れたか否かを判定し、外れた場合
続いてステップ242を実行し、外れていない場合続いてステップ220を実行する。
【0061】
ステップ220では、案内ルート上のあらかじめ定められた再探索ポイントを通過した
か否かを判定する。所定の再探索ポイントは、例えば、案内ルートに沿って基準距離(例
えば1km)毎に設けてもよいし、1つの再探索ポイントから案内ルートに沿って基準距
離(例えば1km)を超えた直後の交差点を次の再探索ポイントにするように設けてもよ
い。あるいは、後述するステップ225の別ルート算出のために必要な処理時間と、その
処理時間の間に車両が走行する距離とをあらかじめ定めておき、案内ルートに沿って当該
走行距離毎に再探索ポイントを設けてもよい。当該再探索ポイントを通過したと判定した
場合は続いてステップ225を実行し、通過しないと判定した場合は再度ステップ210
を実行する。
【0062】
ステップ225では、図2のプログラム100の実行時において目的地以外の候補ルー
トの算出に用いた複数の検索条件(ステップ110参照)を使用して、次の探索ポイント
から目的地までの新たなルートを、検索条件のそれぞれについて算出する。これら算出さ
れたルートを別ルートという。
【0063】
続いてステップ230では、それまでの候補ルートの表示を地図上から消去し、新たに
算出した別ルートを地図に重畳表示させる。なお、これら新たな別ルートの表示色は、案
内ルートとは異なるようにし、かつ、新たな別ルートが複数ある場合は、それらの間でも
互いに異なるようにする。
【0064】
続いてステップ235では、案内ルートおよび新たに算出した別ルートのそれぞれにつ
いて、予想到着時刻および予想到着時刻の誤差範囲を算出する。算出方法は、図2のステ
ップ130、135と同じ方法を用いる。
【0065】
続いてステップ240では、直前のステップ235で算出した誤差範囲を、アナログ時
計の表示に反映させる。
【0066】
具体的には、それまでのアナログ時計の表示に代えて、案内経路について新たに算出し
た予想到着時刻および誤差範囲を、図2のステップ140、145に示したように、それ
ぞれ時計の針(時針、分針)および分針の誤差範囲の角度を有する扇形で、案内ルートお
よび新たに算出した別ルートの表示画面と同じ表示画面に表示させる。さらに、新たな別
ルートについて新たに算出した予想到着時刻および誤差範囲を、図2のステップ140、
145に示したように、それぞれ時計の針(時針、分針)および分針の誤差範囲の角度を
有する扇形で、案内ルートおよび新たに算出した別ルートの表示画面と同じ表示画面に表
示させる。
【0067】
なお、案内ルートの誤差範囲の表示色は、案内ルートの表示色と同じにし、また、別ル
ートの誤差範囲の表示色は、同じ別ルートの表示色と同じにする。ステップ240の後、
再度ステップ210を実行する。
【0068】
また、案内ルートを外れたと判定した後のステップ242では、自車両がその時点にお
ける別ルート上を走行しているか否かを判定し、走行していれば続いてステップ245を
実行し、案内経路でも別ルートでもない道路を走行している場合続いてステップ255を
実行する。
【0069】
ステップ245では、当該走行中の別ルートを、それまでの案内ルートに代わる新たな
案内ルートとする。続いてステップ250では、現在位置マーク25のリング部29の色
を、当該新たな案内ルートの色に変更する。なおステップ250では、アナログ時計の表
示においては、分針および短針の位置を、新たな案内ルートの予想到着時刻に合わせるよ
うになっていてもよい。ステップ250の後、再度ステップ210を実行する。
【0070】
案内経路でも別ルートでもない道路に入った後のステップ255では、図2のプログラ
ム100の実行時において案内ルートの算出に用いた検索条件(ステップ110参照)を
使用して、現在位置から目的地までの新たなルートを算出し、算出したルートを案内ルー
トとする。続いてステップ260では、ステップ225と同じ方法で1つまたは複数の別
ルートを算出する。
【0071】
続いてステップ265では、ステップ255および260で算出した新たな案内ルート
および新たな別ルートを、それまでのルート表示に代えて、地図に重畳表示させる。この
とき、案内ルートおよび新たな別ルートのそれぞれの表示色としては、互いに異なる色を
用いる。
【0072】
続いてステップ270では、ステップ235と同じ方法で、新たな案内ルートおよび新
たに算出した別ルートのそれぞれについて、予想到着時刻および予想到着時刻の誤差範囲
を算出する。続いてステップ275では、ステップ240と同じ方法で、直前のステップ
270で算出した誤差範囲を、アナログ時計の表示に反映させる。
【0073】
続いてステップ280では、現在位置マーク25のリング部29の色を、当該新たな案
内ルートの色に変更する。ステップ280に続いてはステップ210を再度実行する。
【0074】
車両が目的地に近接したと判定した場合に実行される図8のプログラム300において
、制御回路17は、まずステップ310で、別ルートの表示を地図中から消去し、現在自
車両が走行中の案内ルートについてのみ、ルートの重畳表示を行う。
【0075】
続いてステップ320では、アナログ時計表示において、現在走行中の案内ルートのみ
について、予想到着時刻および誤差範囲を算出して表示させ、それ以外の別ルートの予想
到着時刻および誤差範囲の表示があれば、それを消去する。
【0076】
そして制御回路17は、続くステップ330で、目的地に自車両が到着したか否かを判
定し、到着したらプログラム300の実行を終了し、到着していない場合は、再度ステッ
プ310を実行する。
【0077】
以上のようなプログラム200およびプログラム300を実行することで、制御回路1
7は、自車両が目的地に近接したと判定する前の段階においては(ステップ210→NO
参照)、案内ルート上を継続して走行している間は(ステップ215→NO参照)、返し
案内経路以外の別ルートを所定の間隔で繰り返し算出し(ステップ225参照)、算出し
た1つまたは複数の別ルートを、案内ルートと共に、画像表示装置12の表示画面中の地
図上に重畳表示させ(ステップ230参照)、更に交通情報に基づいて別ルートおよび案
内ルートのそれぞれについて予想到着時刻および誤差範囲を算出し(ステップ235参照
)、更に、算出した案内ルートおよび別ルートの誤差範囲のそれぞれを、別ルートおよび
案内ルートと同じ画面中に、アナログ時計のアナログ文字盤20中の分針の角度幅を示す
扇形として、表示する(ステップ240参照)。
【0078】
また制御回路17は、自車両が目的地に近接したと判定する前の段階において(ステッ
プ210→NO参照)、自車両が案内経路を外れて(ステップ215→YES参照)表示
中の別ルートに入った場合(ステップ242→YES参照)、その入った別ルートを案内
ルートに設定し(ステップ245参照)、現在位置マーク25のリング部29の表示色を
当該新案内ルートの表示色と同じになるように変更する(ステップ250参照)。
【0079】
また制御回路17は、自車両が目的地に近接したと判定する前の段階において(ステッ
プ210→NO参照)、自車両が案内経路を外れて(ステップ215→YES参照)表示
中の別ルート以外の道路に入った場合(ステップ242→NO参照)、案内ルートの再探
索(ステップ255)および別ルートの再探索(ステップ260参照)を行い、算出され
た案内ルートおよび別ルートを地図上に重畳表示させ(ステップ265参照)、交通情報
に基づいて当該案内ルートおよび別ルートの予想到着時刻および誤差範囲を算出し(ステ
ップ270参照)、更に、算出した案内ルートおよび別ルートの誤差範囲のそれぞれを、
別ルートおよび案内ルートと同じ画面中に、アナログ時計のアナログ文字盤20中の分針
の角度幅を示す扇形として、表示する(ステップ280参照)。
【0080】
また制御回路17は、自車両が目的地に近接したと判定した後は(ステップ210→Y
ES参照)、すべての別ルートの表示、および、すべての別ルートの誤差範囲の表示につ
いて、表示をやめ、ルートとしては案内ルートのみ表示を継続し(ステップ310参照)
、予想到着時刻の誤差範囲としては、案内ルートの誤差範囲についてのみ表示を継続する
(ステップ320参照)。
【0081】
以上説明した通り、車両用ナビゲーション装置1は、目的地までの複数のルートについ
て、当該目的地までの予想到着時刻および当該予想到着時刻の誤差範囲を算出し、当該複
数のルートのそれぞれについて算出された誤差範囲を、共に画像表示装置12に表示させ
る。
【0082】
このように、複数のルートの予想到着時刻の誤差範囲が共に表示されるので、ユーザは
、それらを直感的に比較することができる。例えば、どのルートの予想到着時刻の誤差幅
が少ないか(すなわち、予想到着時刻の信頼度が高いか)等の比較を一目で判別すること
ができる。すなわち、従来よりも良好なルート選択性をユーザに提供することができる。
【0083】
また、車両用ナビゲーション装置1は、ユーザの現在位置が目的地に近接したことに基
づいて、当該複数のルートのうち、ユーザが所在する案内ルートについて算出された誤差
範囲のみを、画像表示装置12に表示させるようになっていてもよい。
【0084】
ナビゲーション装置のユーザがある程度目的地に近づくと、複数のルートの予想到着時
刻および誤差範囲の差が、ユーザにとって問題とならない程度に小さくなることが多い。
したがって、上記のようにユーザが目的地に近づくことに基づいて、現在通行中のルート
のみを表示することで、ユーザにとって不要となった可能性の高い情報(すなわち、他の
ルートの誤差範囲の情報)を表示しなくなり、ユーザにとって必要でありながらシンプル
な情報を提供する表示が実現する。
【0085】
(第2実施形態)
以下、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるの
は、制御回路17が、図7のプログラム200の実行において、ステップ210で目的地
に近づいたと判定した後の処理の内容である。以下、本実施形態が第1実施形態と異なる
部分について説明する。
【0086】
本実施形態の制御回路17は、図7のプログラム200の実行において、ステップ21
0で目的地に近づいたと判定した後、続いて図9に示すプログラム400を実行し、その
実行においてまずステップ405で、予想到着時刻および誤差の表示の形態を、アナログ
時計の形態から可変リニアグラフ(ディジタル時計)の形態に切り替える。図10に、可
変リニアグラフ形態による予想到着時刻および誤差の表示の一例を示す。
【0087】
この可変リニアグラフ表示においては、画像表示装置12の表示画面中で縦横の長さが
固定された固定範囲に、第1時刻(図10の例では9時50分)から第2時刻(図10の
例では10時30分)までの時間Tを定義域(図10の例では横軸座標)とするグラフ画
像(誤差範囲画像の一例に相当する)を表示する。このグラフの値域(図10の例では縦
軸座標)は、到着時刻の確率分布P(T)である。
【0088】
制御回路17は、この可変リニアグラフ表示において、案内ルートおよび別ルートそれ
ぞれについて算出した到着時刻の確率分布P(T)のグラフを、上述の固定範囲内に表示
させる。なお、各ルートのグラフの表示色は、互いに異なるようにし、かつ、同じルート
の地図上のルート表示の色と同じにする。
【0089】
なお、制御回路17は、可変リニアグラフ表示の両端の時刻である第1時刻と第2時刻
を、案内ルートおよび別ルートの確率分布P(T)に応じて変化させる。具体的には、表
示対象のルートのそれぞれについて、確率分布P(T)が所定値(例えば0.05)以上
となる時刻範囲を特定し、それら複数の時刻範囲のいずれかに属する時刻で最も早い時刻
と最も遅い時刻を含むように、第1時刻と第2時刻を設定する。更に、第1時刻から第2
時刻までの時間間隔に対する、上記最も早い時刻から最も遅い時刻までの時間間隔の比が
、所定比(例えば1:0.9)となるように、第1時刻および第2時刻を決定する。
【0090】
このようにすることで、表示対象の各ルートの誤差範囲が小さくなるほど、可変リニア
グラフ表示の定義域(すなわち、上述の固定範囲内の横軸方向)においては、単位時間当
りに割くグラフ表示画像の長さが減少することになる。
【0091】
アナログ時計の針の角度範囲で各ルートの誤差範囲を表示する方法は、ユーザが誤差範
囲の時間幅を把握し易いという点で有益である。しかし、ユーザがある程度目的地に近づ
くと、誤差範囲が減少し、その結果表示する角度が非常に狭くなるので、逆にユーザにと
って見難くなってしまう可能性がある。このように、表示角度の先鋭化によって見難くな
るという現象は、複数のルートの誤差範囲の表示が重なってしまったときに更に顕著とな
る。
【0092】
そこで、上記のように、ユーザの現在位置が当該目的地から当該第2の基準範囲内に入
ったことに基づいて、各誤差範囲を表示画像中の誤差範囲画像の長さで表すと共に、単位
時間当たりの当該誤差範囲画像の長さを、当該誤差範囲が短くなるほど減少させれば、ユ
ーザが目的地に近づいて誤差範囲が減少しても、誤差範囲の表示が小さくなり過ぎて見難
くなることがない。
【0093】
ステップ405に続くステップ410においては、現在の案内ルートおよび別ルートの
予想到着時刻のうち、最も早いものと最も遅いものとの時間差が所定のX分(Xは、例え
ば5から10までのいずれか)以内であるか否かを判定し、X分以内であれば続いて図8
のプログラム300を実行し、X分より大きければ続いてステップ415を実行する。
【0094】
なお、ステップ415、420、425、430、435、445、450、455、
460、465、470、480の処理内容は、それぞれ図7のプログラム200のステ
ップ215、220、225、230、235、245、250、255、260、26
5、270、280の処理と同じである。
【0095】
また、ステップ440、475の処理内容は、ステップ240、275の処理内容中の
アナログ時計表示を可変リニアグラフ表示に置き換えたものと同じである。また図8のス
テップ320の処理内容は、第1実施形態の処理内容中のアナログ時計表示を可変リニア
グラフ表示に置き換えたものと同じである。
【0096】
以上のようなプログラム300およびプログラム400を実行することで、自車両が目
的地に近接したと判定した後の制御回路17は、表示中の複数ルートの予想到着時刻群が
所定範囲内に近接する前の段階においては(ステップ410→NO参照)、案内ルート上
を継続して走行している間は(ステップ415→NO参照)、返し案内経路以外の別ルー
トを所定の間隔で繰り返し算出し(ステップ425参照)、算出した1つまたは複数の別
ルートを、案内ルートと共に、画像表示装置12の表示画面中の地図上に重畳表示させ(
ステップ430参照)、更に交通情報に基づいて別ルートおよび案内ルートのそれぞれに
ついて到着時刻の確率分布P(T)、予想到着時刻および誤差範囲を算出し(ステップ4
35参照)、更に、算出した案内ルートおよび別ルートの到着時刻の確率分布P(T)の
それぞれを、別ルートおよび案内ルートと同じ画面中に、可変リニアグラフとして、表示
する(ステップ440参照)。
【0097】
また制御回路17は、表示中の複数ルートの予想到着時刻群が所定範囲内に近接する前
の段階においては(ステップ410→NO参照)、自車両が案内経路を外れて(ステップ
415→YES参照)表示中の別ルート以外の道路に入った場合(ステップ440→NO
参照)、案内ルートの再探索(ステップ455)および別ルートの再探索(ステップ46
0参照)を行い、算出された案内ルートおよび別ルートを地図上に重畳表示させ(ステッ
プ465参照)、交通情報に基づいて当該案内ルートおよび別ルートの到着時刻の確率分
布P(T)、予想到着時刻および誤差範囲を算出し(ステップ470参照)、更に、算出
した到着時刻の確率分布P(T)のそれぞれを、可変リニアグラフとして、表示する(ス
テップ480参照)。
【0098】
また制御回路17は、表示中の複数ルートの予想到着時刻群が所定範囲内に近接したと
判定した後は(ステップ410→YES参照)、すべての別ルートの表示、および、すべ
ての別ルートの誤差範囲の表示について、表示をやめ、ルートとしては案内ルートのみ表
示を継続し(ステップ310参照)、予想到着時刻の確立分布P(T)としては、案内ル
ートの誤差範囲についてのみ表示を継続する(ステップ320参照)。
【0099】
このように、目的地への近接度合いに応じて誤差範囲の表示形態を切り替えることで、
目的地への近接度合いによって変化するユーザの見易さに対する要求に対応することがで
きる。
【0100】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限
定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含す
るものである。
【0101】
例えば、第2実施形態においては、現在の案内ルートおよび別ルートの予想到着時刻の
うち、最も早いものと最も遅いものとの時間差がX分以内になったときに、別ルートおよ
び別ルートの誤差範囲の表示を一度にすべて消去するようになっている。
【0102】
しかし、例えば、別ルートの個々について、案内ルートの予想到着時刻と当該別ルート
の予想到着時刻の差が基準時間(例えば5分)未満となった場合に、当該別ルートおよび
当該別ルートの誤差範囲の表示を消去していくようになっていてもよい。
【0103】
また、上記実施形態においては、車両用ナビゲーション装置1は、交通情報として、他
の車両の走行履歴の情報を用いているが、車両用ナビゲーション装置は、自車両の走行履
歴(走行したリンク、走行速度、走行に要した時間等)を交通情報として用いるようにな
っていてもよい。
【0104】
また、上記実施形態において車両用ナビゲーション装置1は、ルートの予想到着時刻お
よび誤差範囲を算出するために、ルート上の各リンクについて、リアルタイム交通情報が
ある場合はリアルタイム交通情報のみを用いて過去の交通情報は用いないようになってい
る。しかし、リアルタイム交通情報がある場合でも、リアルタイム交通情報と過去の交通
情報とを共に用いるようになっていてもよい。
【0105】
また、交通情報等の、更新が必要なデータは、地図データ取得部16の記憶媒体に限ら
ず、他の、車両用ナビゲーション装置1の主電源の供給が停止してもデータを保持し続け
ることができる記憶媒体(例えばフラッシュメモリ、EEPROM、バックアップRAM
)に記憶されるようになっていてもよい。その場合、地図データ取得部16の記憶媒体は
、HDD等の書き込み可能な記憶媒体である必要はなく、DVD、CD−ROM等の書き
込み不可能な記憶媒体であってもよい。
【0106】
また、上記の実施形態において、制御回路17がプログラムを実行することで実現して
いる各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムするこ
とが可能なFPGA)を用いて実現するようになっていてもよい。
【0107】
また、上記実施形態においては、ナビゲーション装置は車載タイプのものであるが、ナ
ビゲーション装置は、人が持ち運びできるタイプのものであってもよい。例えば、ナビゲ
ーション装置の機能を有する携帯電話機やPDAも、本発明のナビゲーション装置に該当
する。
【符号の説明】
【0108】
1 車両用ナビゲーション装置
12 画像表示装置
15 交通情報受信機
20 アナログ文字盤
21 分針
22 時針
23、24 誤差範囲
25 現在位置マーク
26 目的地
27 案内ルート
28 他のルート
29 リング部
31、32 境界時刻
33、34 確率分布グラフ
【特許請求の範囲】
【請求項1】
目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到
着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、47
0)と、
前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に
表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)と、
前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)と、を備えたナビゲーション装置。
【請求項2】
前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到
着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、47
0)、
前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に
表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)、および
前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)として、コンピュータを機能させるプログラム。
【請求項4】
前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項3に記載のプログラム。
【請求項1】
目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到
着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、47
0)と、
前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に
表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)と、
前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)と、を備えたナビゲーション装置。
【請求項2】
前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
目的地までの複数のルートについて、前記目的地までの予想到着時刻および当該予想到
着時刻の誤差範囲を算出する算出手段(130、135、235、270、435、47
0)、
前記複数のルートのそれぞれについて算出された誤差範囲を、共に表示装置(12)に
表示させ、前記複数のルートについて、各ルートの表示に用いる色と、当該ルートについての予想到着時刻の誤差範囲の表示色とを、同じにする表示制御手段(145、240、275、320、405、440、475)、および
前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークの色を変化させる現在位置マーク色変化手段(160)として、コンピュータを機能させるプログラム。
【請求項4】
前記現在位置マーク色変化手段は、前記表示装置の表示画面中の前記複数のルートのうち、選択された案内ルートの色と同じになるよう、現在位置マークのリング部の色を変化させることを特徴とする請求項3に記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−64755(P2013−64755A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−276017(P2012−276017)
【出願日】平成24年12月18日(2012.12.18)
【分割の表示】特願2008−133205(P2008−133205)の分割
【原出願日】平成20年5月21日(2008.5.21)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成24年12月18日(2012.12.18)
【分割の表示】特願2008−133205(P2008−133205)の分割
【原出願日】平成20年5月21日(2008.5.21)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]