
ナビゲーション装置および建築施設進入判定方法
【課題】 加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出することが可能な「ナビゲーション装置および建築施設進入判定方法」を提供する。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置および建築施設進入判定方法に関し、例えば、車両が駐車場に入ったときに駐車場拡大図を表示して案内する機能を備えたナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自立航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置の中には、車両が駐車場内に入ったか否かを判定し、駐車場に入ったことを検知したときには駐車場拡大図を表示して、駐車場内の案内を行うように成されたものも存在する。従来、車両が駐車場に入ったか否かの判定は、加速度センサや傾斜センサからの情報を利用して、車両が傾斜したか否かを基準に行うものや、自車位置と地図データとの照合結果を基準に行うものが一般的であった。
【0004】
ところが、車両の傾斜を基準に駐車場への進入を判定する方法では、車両の現在位置を検出するためのセンサとは別に、加速度センサや傾斜センサを配備しなければならないという問題があった。また、立体駐車場などで入口付近が傾斜している場合には駐車場への進入を検知することができるが、傾斜がない平面駐車場などでは駐車場への進入を全く検知することができないという問題があった。
【0005】
一方、自車位置と地図データとの照合結果を基準に駐車場への進入を判定する方法では、加速度センサや傾斜センサなどの別機器を配備する必要がなく、立体駐車場か平面駐車場かを問わず駐車場への進入を判定することが可能である。しかし、自車位置の検出精度には数メートルから数十メートルの誤差があり、誤差のある自車位置を利用して駐車場への進入判定を行っているため、その判定の精度が悪く、誤判定することがあるという問題があった。
【0006】
さらに、ナビゲーション装置には、マップマッチングと呼ばれる機能が搭載されている。マップマッチングとは、自立航法センサやGPS受信機などを用いて検出した車両の現在位置が、地図データの道路上に正しく乗っていない場合に、投影法等によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に修正する機能を言う。このマップマッチング機能があると、実際には車両が駐車場内に入っているのに、自車位置が道路上に強制的に引き寄せられて、道路上を走っていると誤判定することがあるという問題もあった。
【0007】
このように、駐車場などの道路外を走行しているにもかかわらず、マップマッチングにより自車位置を道路上に算出してしまう不都合に鑑みて、GPS衛星情報の未受信状態が続いているか否かを基準として、車両が駐車場内を走行中か否かを判定するようにした技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2000−310542号公報
【0008】
しかしながら、この特許文献1に記載の技術では、駐車場の内部に入り込んでGPS衛星情報の未受信状態が長く続かないと、車両が駐車場内に入ったことを検知することができない。そのため、駐車場の入口付近で早期に進入を検知することができないという問題があった。また、駐車場によっては、駐車場内の通路に外部に通じる大きな窓や開口部があって、そこからGPS衛星情報を受信できてしまうこともある。その場合には、車両が駐車場内を走行中であることを検知することができないという問題があった。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、このような問題を解決するために成されたものであり、自車位置検出用センサの他に加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
上記した課題を解決するために、本発明では、複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報をGPS受信機から取得し、その衛星配置情報により示される衛星配置パターンに基づいて、車両が建築施設に入ったか否かを判定するようにしている。好ましくは、衛星配置情報により示される衛星配置パターンと、地図データ中に含まれる建築施設の情報から想定される衛星配置パターンとを照合し、両パターンが一致したときに、車両が建築施設に入ったと判断する。
【0011】
衛星配置情報により示される衛星配置パターンの車両の走行に伴う変化を監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断するようにしても良い。また、衛星配置情報により示される複数のGPS衛星の配置パターンに加えて、車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定するようにしても良い。
【発明の効果】
【0012】
上記のように構成した本発明によれば、屋内ではGPS衛星の電波が遮られて受信不可能となる建築施設の入口付近あるいは開口部付近では、電波を受信可能なGPS衛星の位置を表す配置パターンが所定のパターンになることから、衛星配置情報により示される衛星配置パターンがこの所定の配置パターンになったか否かで、車両が建築施設に入ったか否かを判定することができる。
【0013】
これによれば、ナビゲーション装置が車両位置検出用に一般的に備えているGPS受信機があれば建築施設への進入を検出できるので、加速度センサや傾斜センサなどの別機器を配備することは不要であり、傾斜のある立体施設か傾斜のない平面施設かを問わず建築施設への進入を判定することもできる。また、単に自車位置の情報を基準とするのではなく、電波を受信できるGPS衛星の配置パターンを基準として進入の有無を判定するので、マップマッチングの影響を受けることもなく、車両が建築施設に入ったことを精度高く検出することができる。さらに、建築施設の入口付近あるいは開口部付近で受信されるGPS衛星の衛星配置情報を利用するので、車両が建築施設の内部に入り込まなくても進入の有無を判定することができ、建築施設に進入したことを早期に検出することができる。
【0014】
また、地図データ中に含まれる建築施設の情報から想定される衛星配置パターンとの照合をしたり、衛星配置パターンの車両の走行に伴う変化を監視したり、車両の走行履歴を監視したりすることにより、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が建築施設に入ったと誤判定することがなく、判定精度を高めることができる。
【発明を実施するための最良の形態】
【0015】
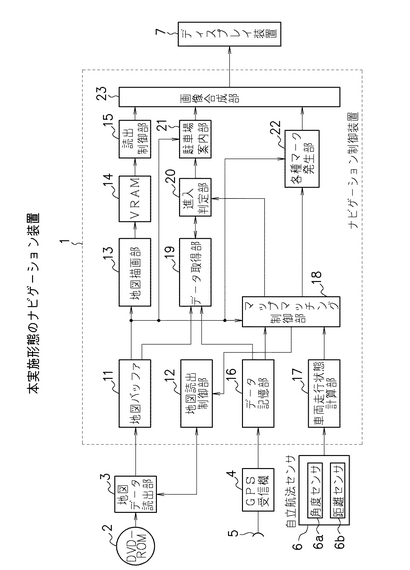
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の構成例を示すブロック図である。図1において、1はナビゲーション制御装置であり、ナビゲーション装置の全体を制御する。2はDVD−ROMであり、地図表示に必要な各種の地図データを記憶している。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM2を用いているが、CD−ROM、ハードディスクなどの他の記録媒体を用いても良い。
【0016】
DVD−ROM2に記憶される地図データには、地図上に存在する駐車場に関するデータから成る駐車場データベースが含まれている。駐車場データベースには、地図上に存在する駐車場のそれぞれ毎に、駐車場名、位置データ(経度・緯度)、駐車場形状、高さ制限、入口や出口の位置、窓や開口部の位置、駐車場拡大図などの情報が含まれている。3は地図データ読出部であり、このような駐車場データベースを含む地図データをDVD−ROM2から読み出すものである。
【0017】
4はGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ5で受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にナビゲーション制御装置1に出力する。このGPS受信機4は、複数のGPS衛星に関する衛星配置情報もナビゲーション制御装置1に出力する。衛星配置情報には、GPS衛星の衛星番号、衛星仰角、衛星方位などの情報が含まれている。これらの情報は、数ミリ秒から数秒程度の間隔でナビゲーション制御装置1に逐次出力される。
【0018】
6は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)6aと、所定走行距離毎に1個のパルスを出力する距離センサ6bとを備えている。自立航法センサ6は、これらの角度センサ6aおよび距離センサ6bによって車両の相対位置および方位を検出し、その情報をナビゲーション制御装置1に出力する。これらの情報も、数ミリ秒から数秒程度の間隔でナビゲーション制御装置1に逐次出力される。
【0019】
7はディスプレイ装置であり、ナビゲーション制御装置1から出力される画像データに基づいて、自車位置周辺の地図情報を自車位置マークや各種ランドマーク等と共に表示する。また、車両が駐車場内に入ったときは、駐車場拡大図を表示する。
【0020】
次に、ナビゲーション制御装置1の内部構成について説明する。11は地図バッファであり、地図データ読出部3によってDVD−ROM2から読み出された地図データを一時的に格納するためのものである。この地図バッファ11は、本発明の地図記憶手段に相当する。12は地図読出制御部であり、地図データ読出部3がDVD−ROM2から地図データを読み出す際の制御を行う。地図読出制御部12によって画面中心位置が計算されると、この画面中心位置を含む所定範囲の地図データの読み出し指示が地図読出制御部12から地図データ読出部3に送られ、地図表示に必要な地図データがDVD−ROM2から読み出されて地図バッファ11に格納される。
【0021】
13は地図描画部であり、地図バッファ11に格納された地図データに基づいて、ディスプレイ装置7への表示に必要な地図画像データを生成する。14はVRAM(ビデオRAM)であり、地図描画部13により生成された地図画像データを一時的に格納する。15は読出制御部であり、VRAM14からの地図画像データの読み出しを制御する。地図描画部13によって生成された地図画像データはVRAM14に一時的に格納され、読出制御部15によって1画面分の地図画像データが読み出される。
【0022】
16はデータ記憶部であり、GPS受信機4から出力される自車の絶対的な位置情報と方位情報、GPS衛星の衛星配置情報などを順次格納する。17は車両走行状態計算部であり、自立航法センサ6から出力される自車の相対的な位置情報と方位情報に基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。また、この車両走行状態計算部17は、逐次計算した車両の位置および方位を走行履歴情報として保存する。この車両走行状態計算部17は、本発明の走行履歴取得手段に相当する。
【0023】
18はマップマッチング制御部であり、地図バッファ11に読み出されている地図データと、データ記憶部16に格納されたGPS受信機4による車両位置および車両方位のデータと、車両走行状態計算部17により計算された推定車両位置および車両方位のデータとを用いて、車両走行距離毎に投影法によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に修正する。
【0024】
19はデータ取得部であり、地図バッファ11から地図データを取得するとともに、データ記憶部16から衛星配置情報を取得する。このデータ取得部19は、本発明の衛星配置情報取得手段に相当する。20は進入判定部であり、データ取得部19により取得された地図データおよび衛星配置情報に基づいて、車両が駐車場内に入ったか否かを判定する。この進入判定部20は、本発明の進入判定手段に相当する。
【0025】
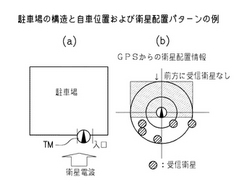
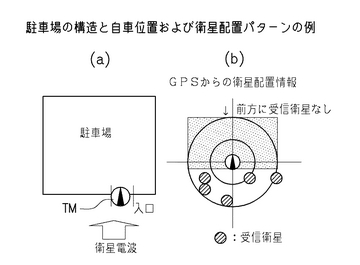
進入判定部20は、具体的には、衛星配置情報により示される複数のGPS衛星の配置パターンと、地図データ中に含まれる駐車場データベースの情報から想定される複数のGPS衛星の配置パターンとを照合することによって、車両が駐車場内に入ったか否かを判定する。この判定内容を、図2および図3の具体例を用いて説明する。図2および図3は、駐車場の構造と自車位置およびGPS衛星の配置パターンを示す図である。
【0026】
図2(a)に示すように、屋内駐車場の入口付近に自車位置TMがあるとき、車両の前方は駐車場の屋内でGPS衛星からの電波が遮断され、車両の後方は屋外でGPS衛星からの電波が届く。これにより、GPS受信機4から取得される衛星配置情報は、図2(b)のように車両の後方にのみ受信衛星が存在し、車両の前方には受信衛星が存在しないという配置パターンになる。
【0027】
一方、進入判定部20は、マップマッチング制御部18から位置修正後の自車位置情報を入力する。そして、データ取得部19により地図バッファ11から読み出されている駐車場データベースの中から、その自車位置に対応する駐車場の情報を取得し、その駐車場情報から受信衛星の配置パターンを想定する。すなわち、駐車場情報の中には駐車場形状、入口や出口の位置、窓や開口部の位置などの情報が含まれているので、電波を受信可能なGPS衛星の配置パターンを想定することができる。
【0028】
進入判定部20は、この想定した受信衛星の配置パターンと、GPS受信機4から取得した衛星配置情報により示される受信衛星の配置パターンとが一致したときに、車両が駐車場内に入ったと判断する。
【0029】
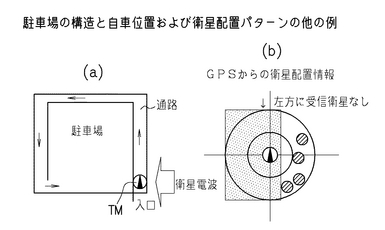
また、図3(a)に示すように、内部に通路があって、その通路に沿って窓や開口部が存在する駐車場内の通路に自車位置TMがあるとき、車両の左側は駐車場の屋内でGPS衛星からの電波が遮断され、車両の右側は屋外で窓や開口部を通してGPS衛星からの電波が届く。これにより、GPS受信機4から取得される衛星配置情報は、図3(b)のように車両の右側にのみ受信衛星が存在し、車両の左側には受信衛星が存在しないという配置パターンになる。
【0030】
一方、進入判定部20は、マップマッチング制御部18から位置修正後の自車位置情報を入力する。そして、データ取得部19により地図バッファ11から読み出されている駐車場データベースの中から、その自車位置に対応する駐車場の情報を取得し、その駐車場情報から受信衛星の配置パターンを想定する。進入判定部20は、この想定した受信衛星の配置パターンと、GPS受信機4から取得した衛星配置情報により示される受信衛星の配置パターンとが一致したときに、車両が駐車場内に入ったと判断する。
【0031】
なお、図3(a)に示すような構造の駐車場の場合、駐車場の屋外に道路が通路と並行して走っている場合も考えられる。この場合、その道路上を走行していても、受信衛星の配置パターンは図3(b)と同型の配置パターンとなる。この場合でも、駐車場内の通路を走行した場合の衛星配置情報(特に衛星仰角)と、駐車場外の道路を走行した場合の衛星配置情報(特に衛星仰角)との違いから、電波を受信可能な領域の広さが異なるので、通路を走行中のときの衛星配置パターンと道路を走行中のときの衛星配置パターンとを区別することができる。
【0032】
車両が駐車場に入ったか否かの判定は、図2に示す衛星配置パターンと図3に示す衛星配置パターンのどちらに基づいて行っても良い。ただ、どの駐車場にも入口は必ず存在するが、通路に沿って窓や開口部が必ず存在するとは限らないので、図2に示す衛星配置パターンに基づいて車両の進入判定を行うのが好ましい。また、図2に示す衛星配置パターンに基づく車両の進入判定と図3に示す衛星配置パターンに基づく車両の進入判定との両方を行っても良い。この場合は、判定の精度を高めることができる。
【0033】
次いで、21は駐車場案内部であり、進入判定部20により車両が駐車場内に入ったことが検知されたときに、地図バッファ11に格納された地図データに含まれる駐車場データベースに基づいて、進入した駐車場の拡大図の画像を生成して出力する。
【0034】
22は各種マーク発生部であり、マップマッチング処理された後の自車位置に表示する車両位置マークや、駐車場やガソリンスタンド、コンビニエンスストア等の位置を表示する各種ランドマーク等を生成して出力する。23は画像合成部であり、読出制御部15によって読み出された地図画像データに、駐車場案内部21および各種マーク発生部22のそれぞれから出力される各画像データを重ねて画像合成を行い、ディスプレイ装置7に出力する。これにより、合成された画像がディスプレイ装置7の画面上に表示される。
【0035】
なお、上述したデータ取得部19、進入判定部20、駐車場案内部21などの機能ブロックは、実際にはCPUあるいはMPU、RAM、ROMなどを備えて構成され、RAMやROMに記憶されたプログラムが動作することによって実現できる。
【0036】
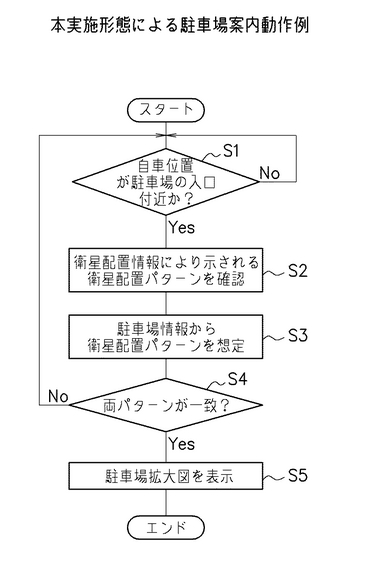
次に、上記のように構成した本実施形態のナビゲーション装置による駐車場案内処理の動作について説明する。図4は、駐車場案内処理の全体の流れを示すフローチャートである。図4において、まず進入判定部20は、マップマッチング制御部18から出力される位置修正後の自車位置情報と、データ取得部19により地図バッファ11から読み出されている地図データとに基づいて、自車位置が駐車場の入口付近か否かを判定する(ステップS1)。
【0037】
自車位置が駐車場の入口付近にない場合は、ステップS1の処理を繰り返す。一方、自車位置が駐車場の入口付近にきた場合、進入判定部20は、データ取得部19を制御してデータ記憶部16から衛星配置情報を読み出し、その衛星配置情報により示される衛星配置パターンを確認する(ステップS2)。また、進入判定部20は、データ取得部19により地図バッファ11から読み出された駐車場データベースに含まれている自車位置付近の駐車場の情報から、その駐車場に関する受信衛星の配置パターンを想定する(ステップS3)。
【0038】
そして、進入判定部20は、ステップS2で確認したGPS受信機4による受信衛星配置パターンと、ステップS3で想定した自車位置付近の駐車場に関する受信衛星配置パターンとが一致したか否かを判定する(ステップS4)。両配置パターンが一致したときは、進入判定部20は車両が駐車場内に入ったと判断して、駐車場案内部21にその旨を通知する。駐車場案内部21は、地図バッファ11に格納された駐車場データベースに基づいて、進入した駐車場の拡大図の画像を生成して画像合成部23に出力することにより、駐車場拡大図をディスプレイ装置7に表示して案内を実行する(ステップS5)。
【0039】
以上詳しく説明したように、本実施形態では、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンに基づいて車両が駐車場内に入ったか否かを判定するようにしたので、ナビゲーション装置が車両位置の検出用に一般的に備えているGPS受信機4があれば駐車場への進入を検出できる。したがって、加速度センサや傾斜センサなどの別機器を配備することを不要とすることができるとともに、傾斜のある立体駐車場か傾斜のない平面駐車場かを問わず駐車場への進入を判定することができる。
【0040】
また、単に自車位置の情報を基準とするのではなく、電波を受信できるGPS衛星の配置パターンを基準として進入の有無を判定するので、マップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出することができる。さらに、駐車場の入口付近あるいは開口部付近で受信されるGPS衛星の衛星配置情報を利用するので、車両が駐車場の内部に入り込まなくても進入の有無を判定することができ、駐車場に進入したことを早期に検出し、すばやく駐車場案内を開始することができる。
【0041】
なお、上記実施形態では、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンと、駐車場データベースの駐車場情報から想定される衛星配置パターンとを照合し、両者が一致したときに車両が駐車場に入ったと判断する例について説明しているが、駐車場情報を用いた照合は本発明にとって必須の構成ではない。例えば、駐車場情報から想定される衛星配置パターンは用いず、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定の配置パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断するようにしても良い。
【0042】
具体的には、車両の前方に受信衛星がなくて後方にのみ受信衛星が存在するような衛星配置パターン、車両の左側に受信衛星がなくて右側にのみ受信衛星が存在するような衛星配置パターン、車両の右側に受信衛星がなくて左側にのみ受信衛星が存在するような衛星配置パターンを始めとして各種の受信衛星配置パターンの情報をナビゲーション制御装置1にあらかじめ記憶しておく。そして、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンがこれらの所定の配置パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断する。
【0043】
ただし、上記実施形態のように駐車場データベースに含まれる駐車場情報から想定される衛星配置パターンとの照合を実行するようにした場合は、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがなく、判定精度を高めることができる。
【0044】
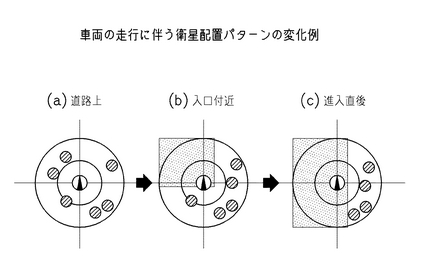
また、衛星配置情報により示される受信衛星配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が駐車場に入ったと判断するようにしても良い。例えば、図3(a)に示すような構造の駐車場に入る場合、図5に示すように、駐車場に入る前に道路上を走行中のときは全方位からGPS衛星の電波を受信可能であり、衛星配置パターンは図5(a)のようになる。しかし、駐車場の入口付近では図5(b)のような衛星配置パターンに変化し、駐車場に入った直後(図3(a)に示す状態)では図5(c)のような衛星配置パターンに変化する。
【0045】
そこで、駐車場の位置や構造に合わせて各種の受信衛星配置変化パターンの情報をナビゲーション制御装置1にあらかじめ記憶しておく。そして、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンの変化がこれらの所定の変化パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断する。
【0046】
このように衛星配置パターンの車両の走行に伴う変化を監視するようにした場合も、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがなく、判定精度を高めることができる。
【0047】
さらに、衛星配置パターンの車両の走行に伴う変化を監視するのではなく、車両の走行履歴そのものを監視し、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンと、車両の走行履歴とに基づいて、車両が駐車場に入ったか否かを判定するようにしても良い。すなわち、車両が駐車場に入る場合、その直前では道路から駐車場に入るために減速が行われ、かつ、旋回が行われることが多い。そこで、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定のパターンと一致するかどうかに加えて、その直前に減速および旋回が行われているか否かを走行履歴情報から判定する。
【0048】
このようにした場合も、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがない。したがって、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定のパターンと一致するかどうかの判定だけを行う場合に比べて、判定の精度を高めることができる。
【0049】
また、上記実施形態では、駐車場データベースの駐車場情報には駐車場形状、入口や出口の位置、窓や開口部の位置などの情報が含まれており、これらの情報から進入判定部20が電波を受信可能なGPS衛星の配置パターンを想定する例について説明したが、これに限定されない。例えば、駐車場情報から想定される受信衛星配置パターンの情報を駐車場データベースの中にあらかじめ格納しておき、進入判定部20は単に衛星配置情報により示される衛星配置パターンと、駐車場データベース中に含まれる衛星配置パターンとを照合することによって、車両が駐車場に入ったか否かを判定するようにしても良い。
【0050】
また、上記実施形態では、車両が駐車場に入ったか否かの判定を行う例について説明したが、駐車場以外の建築施設に入ったか否かの判定にも適用することが可能である。
【0051】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0052】
本発明は、車両が駐車場などの建築施設に入ったときに、その建築施設の内部拡大図を表示して案内する機能を備えたナビゲーション装置に有用である。
【図面の簡単な説明】
【0053】
【図1】本実施形態によるナビゲーション装置の構成例を示すブロック図である。
【図2】駐車場の構造と自車位置およびGPS衛星配置パターンの一例を示す図である。
【図3】駐車場の構造と自車位置およびGPS衛星配置パターンの他の例を示す図である。
【図4】本実施形態による駐車場案内処理の全体の流れを示すフローチャートである。
【図5】衛星配置情報により示される受信衛星配置パターンの車両の走行に伴う変化を示す図である。
【符号の説明】
【0054】
1 ナビゲーション制御装置
4 GPS受信機
5 GPSアンテナ
7 ディスプレイ装置
11 地図バッファ(地図記憶手段)
17 車両走行状態計算部(走行履歴取得手段)
19 データ取得部(衛星配置情報取得手段)
20 進入判定部(進入判定手段)
21 駐車場案内部
【技術分野】
【0001】
本発明は、ナビゲーション装置および建築施設進入判定方法に関し、例えば、車両が駐車場に入ったときに駐車場拡大図を表示して案内する機能を備えたナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自立航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置の中には、車両が駐車場内に入ったか否かを判定し、駐車場に入ったことを検知したときには駐車場拡大図を表示して、駐車場内の案内を行うように成されたものも存在する。従来、車両が駐車場に入ったか否かの判定は、加速度センサや傾斜センサからの情報を利用して、車両が傾斜したか否かを基準に行うものや、自車位置と地図データとの照合結果を基準に行うものが一般的であった。
【0004】
ところが、車両の傾斜を基準に駐車場への進入を判定する方法では、車両の現在位置を検出するためのセンサとは別に、加速度センサや傾斜センサを配備しなければならないという問題があった。また、立体駐車場などで入口付近が傾斜している場合には駐車場への進入を検知することができるが、傾斜がない平面駐車場などでは駐車場への進入を全く検知することができないという問題があった。
【0005】
一方、自車位置と地図データとの照合結果を基準に駐車場への進入を判定する方法では、加速度センサや傾斜センサなどの別機器を配備する必要がなく、立体駐車場か平面駐車場かを問わず駐車場への進入を判定することが可能である。しかし、自車位置の検出精度には数メートルから数十メートルの誤差があり、誤差のある自車位置を利用して駐車場への進入判定を行っているため、その判定の精度が悪く、誤判定することがあるという問題があった。
【0006】
さらに、ナビゲーション装置には、マップマッチングと呼ばれる機能が搭載されている。マップマッチングとは、自立航法センサやGPS受信機などを用いて検出した車両の現在位置が、地図データの道路上に正しく乗っていない場合に、投影法等によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に修正する機能を言う。このマップマッチング機能があると、実際には車両が駐車場内に入っているのに、自車位置が道路上に強制的に引き寄せられて、道路上を走っていると誤判定することがあるという問題もあった。
【0007】
このように、駐車場などの道路外を走行しているにもかかわらず、マップマッチングにより自車位置を道路上に算出してしまう不都合に鑑みて、GPS衛星情報の未受信状態が続いているか否かを基準として、車両が駐車場内を走行中か否かを判定するようにした技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2000−310542号公報
【0008】
しかしながら、この特許文献1に記載の技術では、駐車場の内部に入り込んでGPS衛星情報の未受信状態が長く続かないと、車両が駐車場内に入ったことを検知することができない。そのため、駐車場の入口付近で早期に進入を検知することができないという問題があった。また、駐車場によっては、駐車場内の通路に外部に通じる大きな窓や開口部があって、そこからGPS衛星情報を受信できてしまうこともある。その場合には、車両が駐車場内を走行中であることを検知することができないという問題があった。
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、このような問題を解決するために成されたものであり、自車位置検出用センサの他に加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
上記した課題を解決するために、本発明では、複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報をGPS受信機から取得し、その衛星配置情報により示される衛星配置パターンに基づいて、車両が建築施設に入ったか否かを判定するようにしている。好ましくは、衛星配置情報により示される衛星配置パターンと、地図データ中に含まれる建築施設の情報から想定される衛星配置パターンとを照合し、両パターンが一致したときに、車両が建築施設に入ったと判断する。
【0011】
衛星配置情報により示される衛星配置パターンの車両の走行に伴う変化を監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断するようにしても良い。また、衛星配置情報により示される複数のGPS衛星の配置パターンに加えて、車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定するようにしても良い。
【発明の効果】
【0012】
上記のように構成した本発明によれば、屋内ではGPS衛星の電波が遮られて受信不可能となる建築施設の入口付近あるいは開口部付近では、電波を受信可能なGPS衛星の位置を表す配置パターンが所定のパターンになることから、衛星配置情報により示される衛星配置パターンがこの所定の配置パターンになったか否かで、車両が建築施設に入ったか否かを判定することができる。
【0013】
これによれば、ナビゲーション装置が車両位置検出用に一般的に備えているGPS受信機があれば建築施設への進入を検出できるので、加速度センサや傾斜センサなどの別機器を配備することは不要であり、傾斜のある立体施設か傾斜のない平面施設かを問わず建築施設への進入を判定することもできる。また、単に自車位置の情報を基準とするのではなく、電波を受信できるGPS衛星の配置パターンを基準として進入の有無を判定するので、マップマッチングの影響を受けることもなく、車両が建築施設に入ったことを精度高く検出することができる。さらに、建築施設の入口付近あるいは開口部付近で受信されるGPS衛星の衛星配置情報を利用するので、車両が建築施設の内部に入り込まなくても進入の有無を判定することができ、建築施設に進入したことを早期に検出することができる。
【0014】
また、地図データ中に含まれる建築施設の情報から想定される衛星配置パターンとの照合をしたり、衛星配置パターンの車両の走行に伴う変化を監視したり、車両の走行履歴を監視したりすることにより、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が建築施設に入ったと誤判定することがなく、判定精度を高めることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の構成例を示すブロック図である。図1において、1はナビゲーション制御装置であり、ナビゲーション装置の全体を制御する。2はDVD−ROMであり、地図表示に必要な各種の地図データを記憶している。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM2を用いているが、CD−ROM、ハードディスクなどの他の記録媒体を用いても良い。
【0016】
DVD−ROM2に記憶される地図データには、地図上に存在する駐車場に関するデータから成る駐車場データベースが含まれている。駐車場データベースには、地図上に存在する駐車場のそれぞれ毎に、駐車場名、位置データ(経度・緯度)、駐車場形状、高さ制限、入口や出口の位置、窓や開口部の位置、駐車場拡大図などの情報が含まれている。3は地図データ読出部であり、このような駐車場データベースを含む地図データをDVD−ROM2から読み出すものである。
【0017】
4はGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ5で受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にナビゲーション制御装置1に出力する。このGPS受信機4は、複数のGPS衛星に関する衛星配置情報もナビゲーション制御装置1に出力する。衛星配置情報には、GPS衛星の衛星番号、衛星仰角、衛星方位などの情報が含まれている。これらの情報は、数ミリ秒から数秒程度の間隔でナビゲーション制御装置1に逐次出力される。
【0018】
6は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)6aと、所定走行距離毎に1個のパルスを出力する距離センサ6bとを備えている。自立航法センサ6は、これらの角度センサ6aおよび距離センサ6bによって車両の相対位置および方位を検出し、その情報をナビゲーション制御装置1に出力する。これらの情報も、数ミリ秒から数秒程度の間隔でナビゲーション制御装置1に逐次出力される。
【0019】
7はディスプレイ装置であり、ナビゲーション制御装置1から出力される画像データに基づいて、自車位置周辺の地図情報を自車位置マークや各種ランドマーク等と共に表示する。また、車両が駐車場内に入ったときは、駐車場拡大図を表示する。
【0020】
次に、ナビゲーション制御装置1の内部構成について説明する。11は地図バッファであり、地図データ読出部3によってDVD−ROM2から読み出された地図データを一時的に格納するためのものである。この地図バッファ11は、本発明の地図記憶手段に相当する。12は地図読出制御部であり、地図データ読出部3がDVD−ROM2から地図データを読み出す際の制御を行う。地図読出制御部12によって画面中心位置が計算されると、この画面中心位置を含む所定範囲の地図データの読み出し指示が地図読出制御部12から地図データ読出部3に送られ、地図表示に必要な地図データがDVD−ROM2から読み出されて地図バッファ11に格納される。
【0021】
13は地図描画部であり、地図バッファ11に格納された地図データに基づいて、ディスプレイ装置7への表示に必要な地図画像データを生成する。14はVRAM(ビデオRAM)であり、地図描画部13により生成された地図画像データを一時的に格納する。15は読出制御部であり、VRAM14からの地図画像データの読み出しを制御する。地図描画部13によって生成された地図画像データはVRAM14に一時的に格納され、読出制御部15によって1画面分の地図画像データが読み出される。
【0022】
16はデータ記憶部であり、GPS受信機4から出力される自車の絶対的な位置情報と方位情報、GPS衛星の衛星配置情報などを順次格納する。17は車両走行状態計算部であり、自立航法センサ6から出力される自車の相対的な位置情報と方位情報に基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。また、この車両走行状態計算部17は、逐次計算した車両の位置および方位を走行履歴情報として保存する。この車両走行状態計算部17は、本発明の走行履歴取得手段に相当する。
【0023】
18はマップマッチング制御部であり、地図バッファ11に読み出されている地図データと、データ記憶部16に格納されたGPS受信機4による車両位置および車両方位のデータと、車両走行状態計算部17により計算された推定車両位置および車両方位のデータとを用いて、車両走行距離毎に投影法によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に修正する。
【0024】
19はデータ取得部であり、地図バッファ11から地図データを取得するとともに、データ記憶部16から衛星配置情報を取得する。このデータ取得部19は、本発明の衛星配置情報取得手段に相当する。20は進入判定部であり、データ取得部19により取得された地図データおよび衛星配置情報に基づいて、車両が駐車場内に入ったか否かを判定する。この進入判定部20は、本発明の進入判定手段に相当する。
【0025】
進入判定部20は、具体的には、衛星配置情報により示される複数のGPS衛星の配置パターンと、地図データ中に含まれる駐車場データベースの情報から想定される複数のGPS衛星の配置パターンとを照合することによって、車両が駐車場内に入ったか否かを判定する。この判定内容を、図2および図3の具体例を用いて説明する。図2および図3は、駐車場の構造と自車位置およびGPS衛星の配置パターンを示す図である。
【0026】
図2(a)に示すように、屋内駐車場の入口付近に自車位置TMがあるとき、車両の前方は駐車場の屋内でGPS衛星からの電波が遮断され、車両の後方は屋外でGPS衛星からの電波が届く。これにより、GPS受信機4から取得される衛星配置情報は、図2(b)のように車両の後方にのみ受信衛星が存在し、車両の前方には受信衛星が存在しないという配置パターンになる。
【0027】
一方、進入判定部20は、マップマッチング制御部18から位置修正後の自車位置情報を入力する。そして、データ取得部19により地図バッファ11から読み出されている駐車場データベースの中から、その自車位置に対応する駐車場の情報を取得し、その駐車場情報から受信衛星の配置パターンを想定する。すなわち、駐車場情報の中には駐車場形状、入口や出口の位置、窓や開口部の位置などの情報が含まれているので、電波を受信可能なGPS衛星の配置パターンを想定することができる。
【0028】
進入判定部20は、この想定した受信衛星の配置パターンと、GPS受信機4から取得した衛星配置情報により示される受信衛星の配置パターンとが一致したときに、車両が駐車場内に入ったと判断する。
【0029】
また、図3(a)に示すように、内部に通路があって、その通路に沿って窓や開口部が存在する駐車場内の通路に自車位置TMがあるとき、車両の左側は駐車場の屋内でGPS衛星からの電波が遮断され、車両の右側は屋外で窓や開口部を通してGPS衛星からの電波が届く。これにより、GPS受信機4から取得される衛星配置情報は、図3(b)のように車両の右側にのみ受信衛星が存在し、車両の左側には受信衛星が存在しないという配置パターンになる。
【0030】
一方、進入判定部20は、マップマッチング制御部18から位置修正後の自車位置情報を入力する。そして、データ取得部19により地図バッファ11から読み出されている駐車場データベースの中から、その自車位置に対応する駐車場の情報を取得し、その駐車場情報から受信衛星の配置パターンを想定する。進入判定部20は、この想定した受信衛星の配置パターンと、GPS受信機4から取得した衛星配置情報により示される受信衛星の配置パターンとが一致したときに、車両が駐車場内に入ったと判断する。
【0031】
なお、図3(a)に示すような構造の駐車場の場合、駐車場の屋外に道路が通路と並行して走っている場合も考えられる。この場合、その道路上を走行していても、受信衛星の配置パターンは図3(b)と同型の配置パターンとなる。この場合でも、駐車場内の通路を走行した場合の衛星配置情報(特に衛星仰角)と、駐車場外の道路を走行した場合の衛星配置情報(特に衛星仰角)との違いから、電波を受信可能な領域の広さが異なるので、通路を走行中のときの衛星配置パターンと道路を走行中のときの衛星配置パターンとを区別することができる。
【0032】
車両が駐車場に入ったか否かの判定は、図2に示す衛星配置パターンと図3に示す衛星配置パターンのどちらに基づいて行っても良い。ただ、どの駐車場にも入口は必ず存在するが、通路に沿って窓や開口部が必ず存在するとは限らないので、図2に示す衛星配置パターンに基づいて車両の進入判定を行うのが好ましい。また、図2に示す衛星配置パターンに基づく車両の進入判定と図3に示す衛星配置パターンに基づく車両の進入判定との両方を行っても良い。この場合は、判定の精度を高めることができる。
【0033】
次いで、21は駐車場案内部であり、進入判定部20により車両が駐車場内に入ったことが検知されたときに、地図バッファ11に格納された地図データに含まれる駐車場データベースに基づいて、進入した駐車場の拡大図の画像を生成して出力する。
【0034】
22は各種マーク発生部であり、マップマッチング処理された後の自車位置に表示する車両位置マークや、駐車場やガソリンスタンド、コンビニエンスストア等の位置を表示する各種ランドマーク等を生成して出力する。23は画像合成部であり、読出制御部15によって読み出された地図画像データに、駐車場案内部21および各種マーク発生部22のそれぞれから出力される各画像データを重ねて画像合成を行い、ディスプレイ装置7に出力する。これにより、合成された画像がディスプレイ装置7の画面上に表示される。
【0035】
なお、上述したデータ取得部19、進入判定部20、駐車場案内部21などの機能ブロックは、実際にはCPUあるいはMPU、RAM、ROMなどを備えて構成され、RAMやROMに記憶されたプログラムが動作することによって実現できる。
【0036】
次に、上記のように構成した本実施形態のナビゲーション装置による駐車場案内処理の動作について説明する。図4は、駐車場案内処理の全体の流れを示すフローチャートである。図4において、まず進入判定部20は、マップマッチング制御部18から出力される位置修正後の自車位置情報と、データ取得部19により地図バッファ11から読み出されている地図データとに基づいて、自車位置が駐車場の入口付近か否かを判定する(ステップS1)。
【0037】
自車位置が駐車場の入口付近にない場合は、ステップS1の処理を繰り返す。一方、自車位置が駐車場の入口付近にきた場合、進入判定部20は、データ取得部19を制御してデータ記憶部16から衛星配置情報を読み出し、その衛星配置情報により示される衛星配置パターンを確認する(ステップS2)。また、進入判定部20は、データ取得部19により地図バッファ11から読み出された駐車場データベースに含まれている自車位置付近の駐車場の情報から、その駐車場に関する受信衛星の配置パターンを想定する(ステップS3)。
【0038】
そして、進入判定部20は、ステップS2で確認したGPS受信機4による受信衛星配置パターンと、ステップS3で想定した自車位置付近の駐車場に関する受信衛星配置パターンとが一致したか否かを判定する(ステップS4)。両配置パターンが一致したときは、進入判定部20は車両が駐車場内に入ったと判断して、駐車場案内部21にその旨を通知する。駐車場案内部21は、地図バッファ11に格納された駐車場データベースに基づいて、進入した駐車場の拡大図の画像を生成して画像合成部23に出力することにより、駐車場拡大図をディスプレイ装置7に表示して案内を実行する(ステップS5)。
【0039】
以上詳しく説明したように、本実施形態では、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンに基づいて車両が駐車場内に入ったか否かを判定するようにしたので、ナビゲーション装置が車両位置の検出用に一般的に備えているGPS受信機4があれば駐車場への進入を検出できる。したがって、加速度センサや傾斜センサなどの別機器を配備することを不要とすることができるとともに、傾斜のある立体駐車場か傾斜のない平面駐車場かを問わず駐車場への進入を判定することができる。
【0040】
また、単に自車位置の情報を基準とするのではなく、電波を受信できるGPS衛星の配置パターンを基準として進入の有無を判定するので、マップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出することができる。さらに、駐車場の入口付近あるいは開口部付近で受信されるGPS衛星の衛星配置情報を利用するので、車両が駐車場の内部に入り込まなくても進入の有無を判定することができ、駐車場に進入したことを早期に検出し、すばやく駐車場案内を開始することができる。
【0041】
なお、上記実施形態では、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンと、駐車場データベースの駐車場情報から想定される衛星配置パターンとを照合し、両者が一致したときに車両が駐車場に入ったと判断する例について説明しているが、駐車場情報を用いた照合は本発明にとって必須の構成ではない。例えば、駐車場情報から想定される衛星配置パターンは用いず、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定の配置パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断するようにしても良い。
【0042】
具体的には、車両の前方に受信衛星がなくて後方にのみ受信衛星が存在するような衛星配置パターン、車両の左側に受信衛星がなくて右側にのみ受信衛星が存在するような衛星配置パターン、車両の右側に受信衛星がなくて左側にのみ受信衛星が存在するような衛星配置パターンを始めとして各種の受信衛星配置パターンの情報をナビゲーション制御装置1にあらかじめ記憶しておく。そして、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンがこれらの所定の配置パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断する。
【0043】
ただし、上記実施形態のように駐車場データベースに含まれる駐車場情報から想定される衛星配置パターンとの照合を実行するようにした場合は、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがなく、判定精度を高めることができる。
【0044】
また、衛星配置情報により示される受信衛星配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が駐車場に入ったと判断するようにしても良い。例えば、図3(a)に示すような構造の駐車場に入る場合、図5に示すように、駐車場に入る前に道路上を走行中のときは全方位からGPS衛星の電波を受信可能であり、衛星配置パターンは図5(a)のようになる。しかし、駐車場の入口付近では図5(b)のような衛星配置パターンに変化し、駐車場に入った直後(図3(a)に示す状態)では図5(c)のような衛星配置パターンに変化する。
【0045】
そこで、駐車場の位置や構造に合わせて各種の受信衛星配置変化パターンの情報をナビゲーション制御装置1にあらかじめ記憶しておく。そして、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンの変化がこれらの所定の変化パターンと一致するか否かを判定し、一致したときに、車両が駐車場に入ったと判断する。
【0046】
このように衛星配置パターンの車両の走行に伴う変化を監視するようにした場合も、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがなく、判定精度を高めることができる。
【0047】
さらに、衛星配置パターンの車両の走行に伴う変化を監視するのではなく、車両の走行履歴そのものを監視し、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンと、車両の走行履歴とに基づいて、車両が駐車場に入ったか否かを判定するようにしても良い。すなわち、車両が駐車場に入る場合、その直前では道路から駐車場に入るために減速が行われ、かつ、旋回が行われることが多い。そこで、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定のパターンと一致するかどうかに加えて、その直前に減速および旋回が行われているか否かを走行履歴情報から判定する。
【0048】
このようにした場合も、車両が道路上を走行中のときに衛星配置パターンが所定の配置パターンと偶然に一致したときでも、車両が駐車場に入ったと誤判定することがない。したがって、GPS受信機4から取得される衛星配置情報により示される衛星配置パターンが所定のパターンと一致するかどうかの判定だけを行う場合に比べて、判定の精度を高めることができる。
【0049】
また、上記実施形態では、駐車場データベースの駐車場情報には駐車場形状、入口や出口の位置、窓や開口部の位置などの情報が含まれており、これらの情報から進入判定部20が電波を受信可能なGPS衛星の配置パターンを想定する例について説明したが、これに限定されない。例えば、駐車場情報から想定される受信衛星配置パターンの情報を駐車場データベースの中にあらかじめ格納しておき、進入判定部20は単に衛星配置情報により示される衛星配置パターンと、駐車場データベース中に含まれる衛星配置パターンとを照合することによって、車両が駐車場に入ったか否かを判定するようにしても良い。
【0050】
また、上記実施形態では、車両が駐車場に入ったか否かの判定を行う例について説明したが、駐車場以外の建築施設に入ったか否かの判定にも適用することが可能である。
【0051】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0052】
本発明は、車両が駐車場などの建築施設に入ったときに、その建築施設の内部拡大図を表示して案内する機能を備えたナビゲーション装置に有用である。
【図面の簡単な説明】
【0053】
【図1】本実施形態によるナビゲーション装置の構成例を示すブロック図である。
【図2】駐車場の構造と自車位置およびGPS衛星配置パターンの一例を示す図である。
【図3】駐車場の構造と自車位置およびGPS衛星配置パターンの他の例を示す図である。
【図4】本実施形態による駐車場案内処理の全体の流れを示すフローチャートである。
【図5】衛星配置情報により示される受信衛星配置パターンの車両の走行に伴う変化を示す図である。
【符号の説明】
【0054】
1 ナビゲーション制御装置
4 GPS受信機
5 GPSアンテナ
7 ディスプレイ装置
11 地図バッファ(地図記憶手段)
17 車両走行状態計算部(走行履歴取得手段)
19 データ取得部(衛星配置情報取得手段)
20 進入判定部(進入判定手段)
21 駐車場案内部
【特許請求の範囲】
【請求項1】
複数のGPS衛星からの電波を受信するGPS受信機と、
上記複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報を上記GPS受信機から取得する衛星配置情報取得手段と、
上記衛星配置情報取得手段にて取得された上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに基づいて、車両が建築施設に入ったか否かを判定する進入判定手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが所定の配置パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
車両の走行履歴を取得する走行履歴取得手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンおよび上記走行履歴取得により取得される車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記建築施設の情報を含む地図データを記憶する地図記憶手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記建築施設の情報から想定される上記複数のGPS衛星の配置パターンとを照合することによって、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
上記建築施設の情報およびこれから想定される上記複数のGPS衛星の配置パターンの情報を含む地図データを記憶する地図記憶手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記地図データ中に含まれる上記複数のGPS衛星の配置パターンとを照合することによって、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記建築施設の情報から想定される上記複数のGPS衛星の配置パターンとが一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項5または6に記載のナビゲーション装置。
【請求項8】
複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報をGPS受信機から取得する第1のステップと、
上記第1のステップにて取得された上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに基づいて、車両が建築施設に入ったか否かを判定する第2のステップとを有することを特徴とする建築施設進入判定方法。
【請求項9】
上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項8に記載の建築施設進入判定方法。
【請求項10】
上記第2のステップでは、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに加えて、車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定することを特徴とする請求項8に記載の建築施設進入判定方法。
【請求項11】
上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、地図データ中に含まれる建築施設の情報から想定される上記複数のGPS衛星の配置パターンとを照合し、両パターンが一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項8に記載の建築施設進入判定方法。
【請求項1】
複数のGPS衛星からの電波を受信するGPS受信機と、
上記複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報を上記GPS受信機から取得する衛星配置情報取得手段と、
上記衛星配置情報取得手段にて取得された上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに基づいて、車両が建築施設に入ったか否かを判定する進入判定手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが所定の配置パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
車両の走行履歴を取得する走行履歴取得手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンおよび上記走行履歴取得により取得される車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記建築施設の情報を含む地図データを記憶する地図記憶手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記建築施設の情報から想定される上記複数のGPS衛星の配置パターンとを照合することによって、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
上記建築施設の情報およびこれから想定される上記複数のGPS衛星の配置パターンの情報を含む地図データを記憶する地図記憶手段を更に備え、
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記地図データ中に含まれる上記複数のGPS衛星の配置パターンとを照合することによって、車両が建築施設に入ったか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
上記進入判定手段は、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、上記建築施設の情報から想定される上記複数のGPS衛星の配置パターンとが一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項5または6に記載のナビゲーション装置。
【請求項8】
複数のGPS衛星に関する衛星番号、衛星仰角、衛星方位を含む衛星配置情報をGPS受信機から取得する第1のステップと、
上記第1のステップにて取得された上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに基づいて、車両が建築施設に入ったか否かを判定する第2のステップとを有することを特徴とする建築施設進入判定方法。
【請求項9】
上記衛星配置情報により示される上記複数のGPS衛星の配置パターンが車両の走行に伴って変化することを監視し、その変化パターンが所定の変化パターンと一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項8に記載の建築施設進入判定方法。
【請求項10】
上記第2のステップでは、上記衛星配置情報により示される上記複数のGPS衛星の配置パターンに加えて、車両の走行履歴に基づいて、車両が建築施設に入ったか否かを判定することを特徴とする請求項8に記載の建築施設進入判定方法。
【請求項11】
上記衛星配置情報により示される上記複数のGPS衛星の配置パターンと、地図データ中に含まれる建築施設の情報から想定される上記複数のGPS衛星の配置パターンとを照合し、両パターンが一致したときに、車両が建築施設に入ったと判断することを特徴とする請求項8に記載の建築施設進入判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−3298(P2006−3298A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−182367(P2004−182367)
【出願日】平成16年6月21日(2004.6.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月21日(2004.6.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]