
ナビゲーション装置および現在位置表示方法
【課題】右左折する際に利用者に視覚上の違和感を与えることなく現在位置を表示させるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置に、車両の進行方位を検出する手段と、車両の走行距離を算出する手段と、車両の旋回の開始を検出する検出手段と、前回の車両の現在位置と、検出した進行方位および算出した走行距離とを用いて、車両の現在位置を算出する現在位置算出手段と、算出した現在位置を用いて、現在位置を地図上に表示する表示手段とを有する演算処理部1を設ける。そして、現在位置算出手段は、検出手段が旋回の開始を検出した場合、旋回の開始を検出した後に算出された現在位置に誤差があるか否かを判定し、誤差があると判定した場合、当該算出した現在位置を修正した現在位置を求め、当該修正した現在位置を地図上に表示させる。
【解決手段】ナビゲーション装置に、車両の進行方位を検出する手段と、車両の走行距離を算出する手段と、車両の旋回の開始を検出する検出手段と、前回の車両の現在位置と、検出した進行方位および算出した走行距離とを用いて、車両の現在位置を算出する現在位置算出手段と、算出した現在位置を用いて、現在位置を地図上に表示する表示手段とを有する演算処理部1を設ける。そして、現在位置算出手段は、検出手段が旋回の開始を検出した場合、旋回の開始を検出した後に算出された現在位置に誤差があるか否かを判定し、誤差があると判定した場合、当該算出した現在位置を修正した現在位置を求め、当該修正した現在位置を地図上に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を地図上に表示する技術に関し、特にナビゲーション装置の現在位置表示技術に関する。
【背景技術】
【0002】
ナビゲーション装置には、車両の現在位置を算出し、算出した現在位置周辺の地図上に該現在位置を示すマークを表示するものがある。この現在位置を示すマークは、現在位置の測位誤差や所定距離を走行することにより蓄積される累積誤差等により地図上の道路から外れた位置に表示されることがある。
【0003】
従来のナビゲーション装置には、マップマッチング処理により、測位誤差等により地図上の道路から外れた位置に表示された現在位置を道路上の位置に補正するものがある(例えば特許文献1)。
【0004】
【特許文献1】特開平9−189560号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、マップマッチング処理は、現在位置を算出する度に毎回行われるのではなく、所定の間隔で行われている(例えば、現在位置を10回算出した場合に1回行う)。また、ナビゲーション装置では、車両が交差点等を右左折する場合、実際に車両が走行している道路の幅員により、地図上の位置と算出した現在位置との間に誤差が生じることがある。その結果、ナビゲーション装置では、車両が交差点等を右左折する際、地図上の道路から外れた位置に現在位置に表示されることが多い。
【0006】
上記特許文献1の技術によれば、車両が道路を右左折した際に地図上の道路から外れた位置に現在位置が表示された場合、しばらくの間、現在位置が地図上の道路から外れた位置に表示され続ける。そして、特許文献1では、所定のタイミングでマップマッチング処理が行われ、現在位置を道路上の位置に移すようにしている。そのため、特許文献1では、交差点等を右左折する際、利用者に視覚上の違和感を与えてしまう。
【0007】
本発明は上記事情に鑑みてなされたものであり、ナビゲーション装置において、交差点を右左折する際に、利用者に視覚上の違和感を与えることなく現在位置を地図上に表示させることにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置に適用される。
【0009】
そして、前記ナビゲーション装置は、車両の進行方位を検出する手段と、車両の走行距離を算出する手段と、車両の旋回の開始および旋回方向を検出する検出手段と、前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出する現在位置算出手段と、前記算出した現在位置を用いて、該現在位置を地図上に表示する表示手段とを有し、前記現在位置算出手段は、前記検出手段が検出した旋回の開始および旋回方向を示すデータを受付けた場合、前記地図データを用いて前記算出した現在位置の進行方向にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、前記旋回の開始を検出した後に算出された現在位置および進行方位と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、前記表示手段に当該修正した現在位置を地図上に表示させる。
【発明の効果】
【0010】
このように本発明によれば、車両の旋回の開始を検出した場合に、旋回の開始を検出した後に算出された現在位置に地図上の位置との誤差があるか否かを判定し、誤差がある場合には、車両の旋回後に算出された現在位置を修正するようにしている。
【0011】
そのため、本実施形態によれば、車両が交差点を右左折する場合であっても、視覚上の違和感を与えることなく現在位置を地図上に表示させることをできる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について図面を用いて説明する。
【0013】
最初に本実施形態が適用された車載用ナビゲーション装置の概略構成について図1を用いて説明する。
【0014】
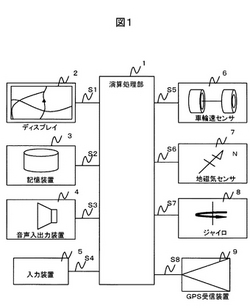
図1は、本発明の実施形態が適用された車載用ナビゲーション装置(以下において単に「ナビゲーション装置」という)の概略構成図である。
【0015】
図示するように、ナビゲーション装置は、演算処理部1と、ディスプレイ2と、地図データ記憶装置3と、音声入出力装置4と、入力装置5と、車輪速センサ6と、地磁気センサ7と、ジャイロ8と、GPS(Global Positioning System)受信装置9と、を有する。
【0016】
演算処理部1は、ナビゲーション装置がユーザに提供する各種情報を処理するための中心的ユニットである。例えば、各種センサ6〜8やGPS受信装置9から出力される情報を基にして現在位置を算出し、算出した現在位置に基づいて、表示に必要な地図データを地図データ記憶装置3から読み出す。その後、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在位置を示すマーク(以下において「現在位置マーク」という)を重ねてディスプレイ2に表示したり、出発地(例えば現在位置)とユーザから指示された目的地とを結ぶ最適な経路を探索し、音声入出力装置4やディスプレイ2を用いてユーザを誘導する。
【0017】
なお、演算処理部1は、後述するように、交差点等で右左折する際に旋回の開始および旋回方向を検出できるように構成されている。そして、演算処理部1は、旋回の開始を検出した場合、検出した現在位置および旋回方向から旋回が終了した際に走行している地図上の道路を推定する。そして、演算処理部1は、推定した道路上に現在位置が徐々に近づいて表示できるように、後述する所定の規則にしたがい、算出した現在位置を修正した上で表示する。
【0018】
ディスプレイ2は、演算処理部1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。また、演算処理部1とディスプレイ2との間の信号S1は、RGB信号やNTSC(National TV Standards Committee)信号で接続するのが一般的である。
【0019】
地図データ記憶装置3は、日本列島の全体図から全国各市町村の詳細図まで多段階の縮尺図に対応した地図データを記憶するユニットであり、例えば、CD−ROMドライブとCD−ROM、DVD−ROMドライブとDVD−ROM、またはHDD等により構成される。
【0020】
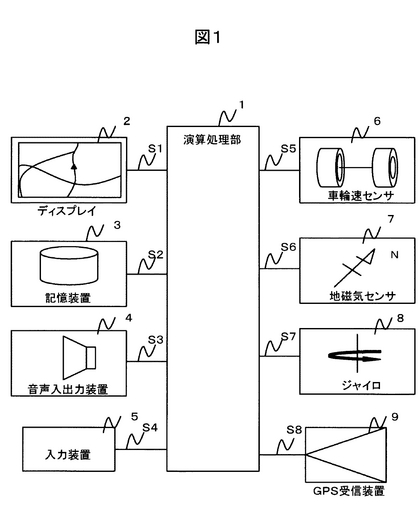
ここで地図データの構成を説明する。図2は、地図データ記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。図示するように、地図データ記憶装置3には、地図を複数に分割することで得られるメッシュ領域毎に地図データ310が記憶されている。地図データ310は、メッシュ領域を識別するためのメッシュID311、および、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ312を有する。
【0021】
リンクデータ312は、リンクを識別するためのリンクID3121、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報3122、リンクを含む道路の種別情報3123、リンクの長さを示すリンク長情報3124、リンクの旅行時間(或いは移動時間)情報3125、2つのノード(開始ノード、終了ノード)にそれぞれ接続するリンクのリンクID(接続リンクID)3126、および道路幅情報(図示せず)、リンクの方位を示す情報(リンク方位)などを有する。また、地図データ310には、対応するメッシュ領域に含まれている道路以外の地図構成物の情報(名称、種別、座標情報など)も含まれている。
【0022】
図1に戻り、説明を続ける。音声入出力装置4は、演算処理部1で生成したユーザへのメッセージを音声信号に変換して出力すると共に、ユーザが発した声を認識し、デジタルデータに変換して演算処理部1にその内容を転送する。
【0023】
入力装置5は、ナビゲーション装置の各種機能選択、目的地設定等のユーザからの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ2上に貼られたタッチパネルなどで構成される。
【0024】
センサ6〜8およびGPS受信装置9は、ナビゲーション装置が現在位置および進行方向を算出するために使用するものである。車輪速センサ6は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。地磁気センサ7は、地球が保持している磁気を検知し、移動体が向かっている方角を検出する。ジャイロ8は、光ファイバジャイロや振動ジャイロで構成され、移動体が回転した角度を検出する。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0025】
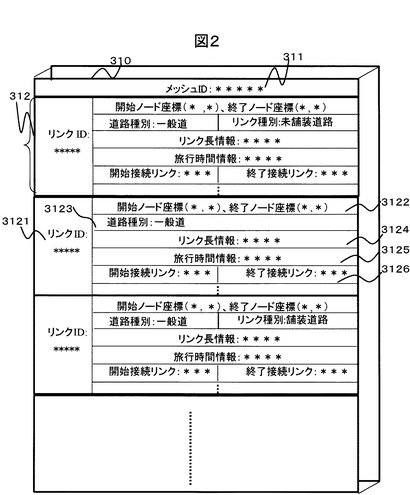
続いて、上述したナビゲーション装置の演算処理部1が有する機能について図3を用いて説明する。図3は、演算処理部1の機能構成を説明するための図である。
【0026】
図示するように、演算処理部1は、設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、およびグラフィックス処理部19を有する。
【0027】
設定部10は、入力装置5および音声入出力装置4に入力されたユーザからの要求を受け付け、その要求された内容に対応する処理が実行されるように演算処理部1を制御する。例えば、ユーザが、入力装置5を介して目的地に向うための推奨経路の探索を要求した場合、出発地(または現在位置)から目的地までの経路を探索する処理を経路探索部15に要求する。
【0028】
現在位置検出部11は、車輪速センサ6で計測される距離パルスデータS5およびジャイロセンサ8で計測される角速度データS7を各々積分した結果得られる距離データおよび角度データを用いて、そのデータを時間軸で積分していくことにより、初期値(X,Y)から自車走行後の位置である現在位置(X´,Y´)および車両の進行方向を定期的に算出する。現在位置を算出する間隔について特に限定しないが、例えば、現在位置検出部11は、距離データを用いて、車両が「20m」走行したと判定する度に現在位置を算出するようにしてもよい。なお、現在位置検出部11は、自車の回転した角度と進む方向との関係を一致させるため、地磁気センサ7から得られた方位データS6と、ジャイロ8から得られ角速度データS7を積分した角度データを参照して、自車が進行している方向(車両方位)の絶対方位を推定する。そして、現在位置検出部11は、初期値(X,Y)と、検出された走行距離(距離データ)および検出された車両方位(角度データ)とを用いて現在位置(X´,Y´)を求める。
【0029】
なお、車輪速センサ6のデータS5およびジャイロ8のデータS7を各々積分していくと、誤差が蓄積するため、ある時間でGPS受信装置9から得られた位置データS8をもとに蓄積した誤差をキャンセルする処理を施す。
【0030】
現在位置検出部11は、上記算出した現在位置を示すデータを地図表示処理部18に出力する。また、現在位置検出部11は、現在位置を算出した場合、所定の割合(例えば10回に1回)で、マップマッチ処理部13にマップマッチング処理を行わせる。現在位置検出部11は、マップマッチ処理部13からマップマッチング処理された現在位置を取得する。そして、現在位置検出部11は、マップマッチングされた現在位置を地図表示処理部18に出力する。
【0031】
なお、現在位置検出部11は、センサ6〜8およびGPS受信装置9からのデータS5〜S8に基づいて、自車が旋回を開始こと、および旋回方向を検出する処理を行う。そして、現在位置検出部11は、旋回を検出した際、所定の要件を満たすことを要件として、算出した現在位置を修正した上で、地図表示処理部18に出力する。
【0032】
データ読込部12は、ディスプレイ2に表示が要求される領域や、経路探索のために要求される領域(出発地および目的地を含む)にある地図データ310を、地図データ記憶装置3から読み込む。
【0033】
経路誘導部16は、後述する経路探索部15が探索した推奨経路と、現在位置検出部11が検出した現在位置とを比較し、交差点を通過する前に直進すべきか、右左折すべきかを音声入出力装置4を用いて音声でユーザに知らせたり、ディスプレイ2に表示された地図上に進行すべき方向を表示してユーザに推奨経路を通知する。
【0034】
マップマッチ処理部13は、現在位置検出部11が定期的に出力する現在位置を取得する。マップマッチ処理部13は、データ読込部12が読込んだ現在位置周辺の地図データ310と、後述する軌跡記憶部14に記憶されている走行軌跡とを互いに照らし合わせ、形状の相関が最も高い道路(リンク)上に、現在位置マークが表示できるように、現在位置検出部11から定期的に出力される現在位置を補正する。マップマッチ処理部13は、補正した現在位置を示すデータを現在位置検出部11に出力する。
【0035】
軌跡記憶部14は、マップマッチ処理部13でマップマッチ処理が施された現在位置の情報を、軌跡データとして自車が所定距離を走行する度に記憶する。この軌跡データは、これまで走行してきた道路について、対応する地図上の道路に軌跡マークを描画するために用いられる。
【0036】
経路探索部15は、ダイクストラ法等を用いて、指定された2地点(現在位置、目的地)を結ぶ最適なコストで目的地に到達する経路を、地図データ310(図2参照)を用いて探索する。経路探索部15は、上記探索の結果得られた経路を推奨経路として、ディスプレイ2に表示させるために地図表示処理部18に出力する。
【0037】
地図表示処理部18は、ディスプレイ2に表示が要求される領域にある地図データ310を地図データ記憶装置3からデータ読込部12を介して受け取る。地図表示処理部18は、経路探索部15から探索した経路を受け取る。また、地図表示処理部18は、現在位置検出部11から検出された現在位置を示すデータを取得する。そして、地図表示処理部18は、道路、その他の地図構成物、現在位置マーク、目的地、および経路誘導のための矢印といったマーク等をディスプレイ2の画面に描画させるための地図描画コマンドを生成し、グラフィックス処理部19に出力する。
【0038】
メニュー表示処理部17は、設定部10から出力される命令を受け、グラフィックス処理部19が、様々な種類のメニューやグラフなどをディスプレイ2の画面に描画するようにメニュー描画コマンドを生成する。
【0039】
グラフィックス処理部19は、地図表示処理部18およびメニュー表示処理部17で生成されたコマンド(地図描画コマンド、メニュー描画コマンド)に基づいて、ディスプレイ2の画面上に画像データを表示させる。
【0040】
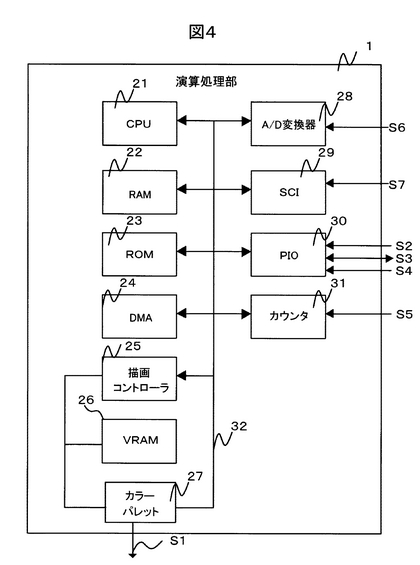
続いて、演算処理部1のハードウェア構成を説明する。図4は、演算処理部1のハードウェア構成を示す図である。
【0041】
図示するように、演算処理部1は、CPU(中央演算処理装置)21と、CPU21が実行するプログラムやデータを一時的に記憶するRAM(Random Access Memory)22と、上記各部(設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、グラフィックス処理部19)が有する機能を実行するためのプログラムが予め記憶されているROM(Read Only Memory)23と、メモリ間およびメモリと各デバイスとの間のデータを転送するDMA(Direct Memory Access)24と、グラフィック描画を実行し且つ表示制御を行う描画コントローラ25と、グラフィックスイメージデータを蓄えるVRAM(Video Random Access Memory)26と、イメージデータをRGB信号に変換するカラーパレット27と、アナログ信号をデジタル信号に変換するA/D変換器28と、シリアル信号をバスに同期したパラレル信号に変換するSCI(Serial Communication Interface)29と、パラレル信号をバスに同期させてバス上に載せるPIO(Parallel Input/Output)30と、パルス信号を積分するカウンタ31と、を有する。
【0042】
上述した各部(設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、グラフィックス処理部19)の機能は、CPU21が、ROM23に記憶されている上記各部が有する機能を実行するためのプログラを、RAM22にロードし、実行することにより実現される。
【0043】
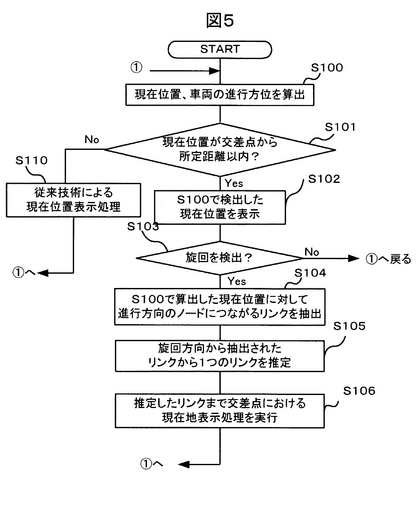
続いて、本実施形態のナビゲーション装置が行う現在位置表示処理について、図5を用いて説明する。図5は、本実施形態のナビゲーション装置の現在位置表示処理のフローを説明するための図である。
【0044】
先ず、現在位置検出部11は、所定の間隔で現在位置および車両の進行方位を算出する(S100)。次に、現在位置検出部11は、算出した現在位置および車両の進行方向を示すデータと、データ読込部12を介して取得した現在位置周辺の地図データ310とから、現在位置が交差点から所定距離の範囲内であるか否かの判定を行う(S101)。そして、現在位置検出部11は、検出した現在位置が交差点から所定距離の範囲内に入っていないと判定した場合、S110の処理に進む。一方、現在位置検出部11は、検出した現在位置が交差点から所定距離の範囲内に在ると判定した場合、S102の処理に進む。
【0045】
なお、本実施形態では、上記交差点からの所定距離の具体的な数字については特に限定しない。例えば、所定距離を「50m」と設定しておくようにしてもよい。この場合、現在位置検出部11は、現在位置が交差点から「50m」以内に入ったと判断した場合、S101に進み、現在位置が交差点から「50m」以内に入っていないと判断した場合、S110に進む。
【0046】
S110では、現在位置検出部11は、従来技術の現在位置表示処理を行い、S100の処理に戻る。具体的には、現在位置検出部11は、S100で検出した現在位置を地図表示処理部18に出力する。また、現在位置検出部11は、所定の割り合(例えば10回に1度)でマップマッチ処理部13にマップマッチグ処理を行なわせ、マップマッチング処理された現在位置を地図表示処理部18に出力する。地図表示処理部18は、取得した現在位置と、データ読込部12が読込んだ地図データ310を用いて、地図上に現在位置を示す画面を生成し、生成した画面をディスプレイ2に表示する。
【0047】
続いて、S101において、現在位置検出部11が、S100で算出した現在位置が交差点から所定距離の範囲内に在ると判定した場合に行う処理について説明する。
【0048】
S102では、現在位置検出部11は、S100で算出した現在位置を地図上に示した画面を、地図表示処理部18を介してディスプレイ2に表示して、S103の処理に進む。
【0049】
S103では、現在位置検出部11は、車両が所定距離(例えば10m)を走行する間に、車両が旋回したか否かの監視を行う。現在位置検出部11は、旋回を検出した場合にS104に進み、旋回を検出しない場合にS100の処理に戻る。なお、車両が所定距離(例えば10m)を走行する間に旋回を検出しない場合、S100の処理に戻るようにしたのは、車両が十字路等を右左折しないで直進する場合があることを考慮したためである。
【0050】
S104では、S100で検出した現在位置および進行方位と、旋回を検出した際に取得した旋回方向と、地図データとを用いて、上記現在位置に対して進行方向にあるノード(現在位置の属するリンクの終了ノード)に繋がるリンク(道路)を全て抽出し、S105の処理に進む。
【0051】
S105では、現在位置検出部11は、上記抽出したリンクの中から、S102で取得した旋回方向を用いて、該旋回方向に位置する一のリンク(道路)を特定する。
【0052】
そして、現在位置検出部11は、交差点における現在位置表示処理(図6の処理フロー)を行う。現在位置検出部11は、交差点における現在位置表示処理(図6の処理フロー)が終了した後、S100の処理に戻る。
【0053】
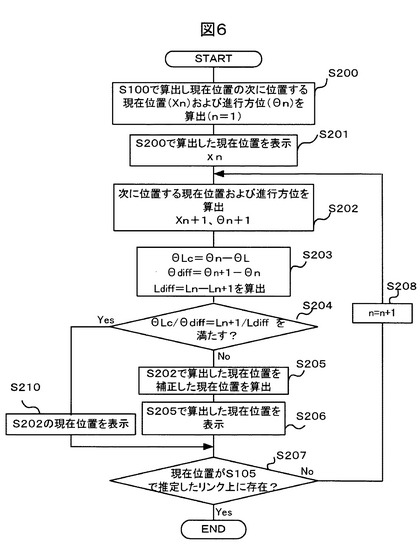
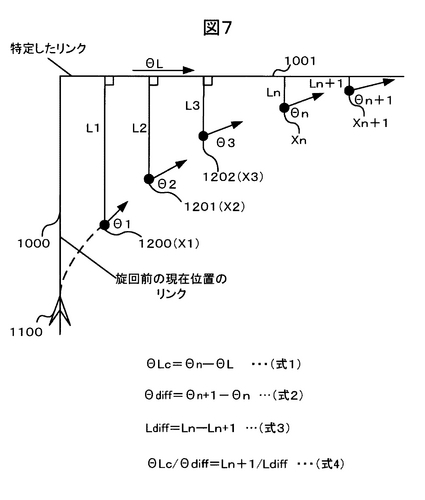
続いて、本実施形態の交差点における現在位置表示処理を図6〜図8を用いて説明する。図6は、本実施形態のナビゲーション装置が行う、車両が交差点を通過する際の現在位置表示処理のフロー図である。図7および図8は、現在位置検出部11が行う現在位置の補正処理を説明するための図である。なお、図7および図8に示す、1100は、図6のS100で算出された現在位置を示し、1201〜1203は、車両の旋回を検出後に現在位置検出部11が算出した現在位置を示すものとする。
【0054】
先ず、現在位置検出部11は、S100で算出された現在位置1100(図7参照)の次に車両が位置すると推定される現在位置1200および車両方位「θ1」を算出する(S200)。次に、現在位置検出部11は、S200で算出した現在位置をディスプレイ2に表示して(S201)、S202の処理に進む。
【0055】
S202では、現在位置検出部11は、上記の表示した現在位置1200の次に車両が位置すると推定される現在位置1201および車両方位「θ2」を算出する。
【0056】
続いて、現在位置検出部11は、S200およびS202で求めた現在位置1200、1201、車両方位「θ1」、「θ2」、上述したS105で推定したリンク1001、および地図データを用いて、以下に示す(式1)〜(式3)により求められる「θLc」、「θdiff」、「Ldiff」を算出する。
θLc=θn−θL…(式1)
θdiff=θn+1−θn…(式2)
Ldiff=Ln−Ln+1…(式3)
具体的には、現在位置検出部11は、地図データを用いてリンク1001のリンク方位(θL)を特定し(図7参照)、算出した車両方位「θ1」および特定したリンク方位(θL)を、上記(式1)に代入して「θLc」を求める。また、現在位置検出部11は、車両方位「θ1」および「θ2」を、上記(式2)に代入して「θdiff」を求める。なお、ここでは、「n=1」であるため、「θLc」は、「θ1−θL」により求められる。また、「θdiff」は、「θ2−θ1」により求められる。
【0057】
また、現在位置検出部11は、現在位置1200、1201、リンク1001、および地図データを用いて、現在位置1200からリンク1001に引いた垂線距離「Ln(ここでは、L1を求める)」を算出する。また、現在位置検出部11は、現在位置1201からリンク1001に引いた垂線距離「Ln+1(ここでは、L2を求める)」を算出する。現在位置検出部11は、算出した「Ln」および「Ln+1」を、上記(式3)に代入して「Ldiff」を求める。なお、ここでは、「n=1」であるため、「Ldiff」は、「L1−L2」により求められる。
【0058】
続いて、現在位置検出部11は、算出した現在位置1200、1201が誤差を含まない正確な位置であるか否かを判定する。具体的には、現在位置検出部11は、S203で求めた「θLc」、「θdiff」、「Ldiff」、および「Ln+1(ここでは、L2)」を以下の(式4)に代入する。現在位置検出部11は、上記の(式4)を満たすか否かの判定を行う。これは、上記(式4)を満たさない場合に、算出した現在位置に地図上の位置との誤差が含まれていると考えられるためである。そして、現在位置検出部11は、(式4)を満たす場合、S210の処理に進み、当該(式4)を満たさない場合、S205〜206の処理に進む(S204)。
θLc/θdiff=Ln+1/Ldiff…(式4)
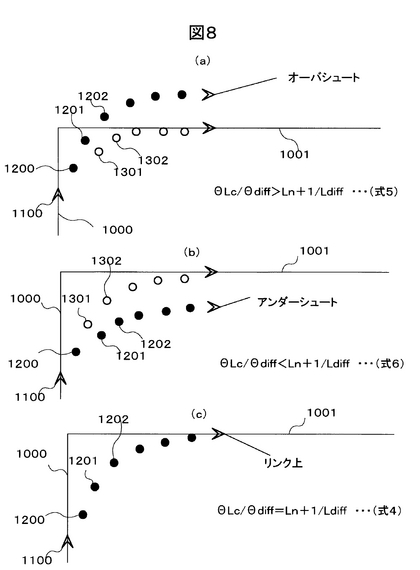
ここで、図8を用いて、現在位置検出部11が上記(式4)を満たすと判定した場合の現在位置表示処理と、満たさないと判定した場合の現在位置表示処理とを説明する。図8では、(a)および(b)図に(式4)を満たさない場合の例を示し、(c)図に(式4)を満たす場合の現在位置を示している。
【0059】
図8(a)図は、上記(式4)を満たさない場合であって、かつ以下の(式)5を満たす場合の現在位置1200〜1202を示している。具体的には、(式4)を満たさない場合であって、かつ以下の(式5)を満たす場合、現在位置算出部11が算出した現在位置をそのまま地図上に表示した場合、車両の現在位置がオーバシュートして表示されてしまう。
【0060】
また、図8(b)図は、上記(式4)を満たさない場合であって、かつ以下の(式)6を満たす場合の現在位置1200〜1202を示している。そして、(式4)を満たさない場合であって、かつ以下の(式)6を満たす場合、現在位置検出部11が算出した現在位置1200〜1202をそのまま地図上に表示した場合、車両の現在位置がアンダーシュートして表示されてしまう。
θLc/θdiff>Ln+1/Ldiff…(式5)
θLc/θdiff<Ln+1/Ldiff…(式6)
そして、オーバシュート或いはアンダーシュートした現在位置を表示した場合、交差点を右左折する際、利用者に視覚上の違和感を与えてしまう。また、オーバシュート或いはアンダーシュートの結果、道路上から外れた位置に表示している現在位置をマップマッチング処理で道路上の位置に戻した場合、現在位置が道路上から外れた位置から道路上に飛び移り表示されることになり、利用者に視覚上の違和感を与えてしまう。
【0061】
なお、上記(式4)を満たす場合、現在位置検出部11が求めた現在位置の測位誤差が少ないと考えられる。そして、現在位置検出部11が算出する現在位置が上記(式4)を満たす場合、その現在位置は、オーバシュート或いはアンダーシュートして表示されることなく、S105で推定したリンク上の位置に至るようになる(図8(c))。
【0062】
このように、上記(式4)を満たすか否かを判定することにより、現在位置がオーバシュート(或いはアンダーシュート)して表示されるか否かを判断することができる。そのため、本実施形態の現在位置検出部11は、上記(式4)を満たさない場合、S202で算出した現在位置を補正して、補正した現在位置を用いて地図上に現在位置を表示するようにしている(S205〜206)。
【0063】
より、具体的には、(式4)を満たさず、かつ(式5)を満たす場合、S205では、現在位置検出部11は、S202で算出した車両の進行方位「θ2」より大きい値の「θ2´」を求める(例えば、S202で算出した車両の進行方位「θ2」に所定の値を加算して「θ2´」を求める)。現在位置検出部11は、S200で求めた現在位置1200と、センサから求めた車両の走行距離と、「θ2´」、および地図データ等を用いて、新たな現在位置1301を算出する(図8(a)図参照)。
【0064】
また、(式4)を満たさず、かつ(式6)を満たす場合、S205では、現在位置検出部11は、S202で算出した車両の進行方位「θ2」より小さい値の「θ2”」を求める(例えば、S202で算出した車両の進行方位「θ2」に所定の値を減算して「θ2”」を求める)。現在位置検出部11は、S200で求めた現在位置1200、センサから求めた車両の走行距離、「θ2”」、および地図データ等を用いて、新たな現在位置1301を算出する(図8(b)図参照)。なお、S205において、上記の「θ2´」および「θ2”」を求めるための具体的な手順については特に限定しない。例えば、現在位置検出部11は、上記(式4)を満たすように「θ2´」および「θ2”」を算出する。
【0065】
また、S204で、上記(式4)を満たすと判定された場合、算出された現在位置は、誤差が小さいと考えられる。そのため、S202で算出された現在位置を用いて、地図上に現在位置を表示する(S210)。
【0066】
S207では、現在位置検出部11は、S206で表示した現在位置(またはS210で表示した現在位置)がS105で推定したリンク上に在るか否かを判定し、当該リンク上に在る場合に処理を終了する。一方、現在位置検出部11は、上記リンク上にない場合、次の位置する現在位置および進行方位を算出する(S208、202)。ここでは、現在位置1201の後の現在位置1202、および「θ3」を求める(図7参照)。そして、上述したS203以降の処理を繰り返す。
【0067】
このように、本実施形態によれば、車両が交差点を右左折する際、測位誤差により、正確な現在位置を算出できなかった場合、現在位置を補正した上で地図上に表示するようにしている。また、本実施形態では、車両が交差点を右左折した場合には、マップマッチング処理を行わない。
【0068】
したがって、本実施形態によれば、交差点を右左折する際に、測位誤差等により、正確な現在位置を算出できない場合でも、現在位置を補正した位置に表示するため、利用者に交差点を走行する際に視覚上の違和感を与えることがない。
【0069】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、上記図5に示すフローでは、S101において、検出した現在位置が交差点から所定距離の範囲内か否かを判断するようにしているが、特にこれに限定するものではない。例えば、旋回を検知するまでは、従来技術の現在位置マーク表示を行い、旋回を検知した際にS104〜106の処理を行うようにしてもよい。
【0070】
また、本実施形態では、自車位置検出部11の旋回開始を検出する手段について、センサ6〜8およびGPS受信装置9からのデータS5〜S8を利用する場合について説明しているが、これは例示に過ぎない。例えば、車両の運転ハンドルにハンドルの回転を検出する回転センサを設けておく。そして、上記回転センサにより旋回開始を検知するようにしてもよい。
【0071】
また、本実施形態では、ディスプレイ2に表示させる地図データ310についてナビゲーション装置が有する地図データ記憶装置3が記憶している場合を例に説明したが、特にこれに限定するものではない。例えば、車載用ナビゲーション装置に、外部とデータ通信を行う通信部を設けておいて、該通信部を用いて、地図データ310を外部から取得するようにしてもよい。
【図面の簡単な説明】
【0072】
【図1】本発明の実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の地図データ記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。
【図3】本発明の実施形態の演算処理部1の機能構成を説明するための図である。
【図4】本発明の実施形態の演算処理部1のハードウェア構成を示す図である。
【図5】本発明の実施形態のナビゲーション装置の現在位置表示処理のフローを説明するための図である。
【図6】本発明の実施形態のナビゲーション装置が行う、交差点を右折する際の現在位置マークの表示を説明するための図である。
【図7】本発明の実施形態のナビゲーション装置が行う、車両が交差点を通過する際の現在位置表示処理のフロー図である。
【図8】本実施形態の現在位置検出部11が行う現在位置の補正処理を説明するための図である。
【符号の説明】
【0073】
1…演算処理部、2…ディスプレイ、3…地図データ記憶装置、4…音声入出力装置、5…入力装置、6…車輪速センサ、7…地磁気センサ、8…ジャイロ、9…GPS受信装置、10…設定部、11…現在位置検出部、12…データ読込部、13…マップマッチ処理部、14…軌跡記憶部、15…経路探索部、16…経路誘導部、17…メニュー表示処理部、18…地図表示処理部、19…グラフィックス処理部、21…CPU、22…RAM、23…ROM、24…DMA、25…描画コントローラ、26…VRAM、27…カラーパレット、28…A/D変換器、29…SCI、30…PIO、31…カウンタ、1100…現在位置マーク
【技術分野】
【0001】
本発明は、現在位置を地図上に表示する技術に関し、特にナビゲーション装置の現在位置表示技術に関する。
【背景技術】
【0002】
ナビゲーション装置には、車両の現在位置を算出し、算出した現在位置周辺の地図上に該現在位置を示すマークを表示するものがある。この現在位置を示すマークは、現在位置の測位誤差や所定距離を走行することにより蓄積される累積誤差等により地図上の道路から外れた位置に表示されることがある。
【0003】
従来のナビゲーション装置には、マップマッチング処理により、測位誤差等により地図上の道路から外れた位置に表示された現在位置を道路上の位置に補正するものがある(例えば特許文献1)。
【0004】
【特許文献1】特開平9−189560号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、マップマッチング処理は、現在位置を算出する度に毎回行われるのではなく、所定の間隔で行われている(例えば、現在位置を10回算出した場合に1回行う)。また、ナビゲーション装置では、車両が交差点等を右左折する場合、実際に車両が走行している道路の幅員により、地図上の位置と算出した現在位置との間に誤差が生じることがある。その結果、ナビゲーション装置では、車両が交差点等を右左折する際、地図上の道路から外れた位置に現在位置に表示されることが多い。
【0006】
上記特許文献1の技術によれば、車両が道路を右左折した際に地図上の道路から外れた位置に現在位置が表示された場合、しばらくの間、現在位置が地図上の道路から外れた位置に表示され続ける。そして、特許文献1では、所定のタイミングでマップマッチング処理が行われ、現在位置を道路上の位置に移すようにしている。そのため、特許文献1では、交差点等を右左折する際、利用者に視覚上の違和感を与えてしまう。
【0007】
本発明は上記事情に鑑みてなされたものであり、ナビゲーション装置において、交差点を右左折する際に、利用者に視覚上の違和感を与えることなく現在位置を地図上に表示させることにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一態様は、2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置に適用される。
【0009】
そして、前記ナビゲーション装置は、車両の進行方位を検出する手段と、車両の走行距離を算出する手段と、車両の旋回の開始および旋回方向を検出する検出手段と、前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出する現在位置算出手段と、前記算出した現在位置を用いて、該現在位置を地図上に表示する表示手段とを有し、前記現在位置算出手段は、前記検出手段が検出した旋回の開始および旋回方向を示すデータを受付けた場合、前記地図データを用いて前記算出した現在位置の進行方向にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、前記旋回の開始を検出した後に算出された現在位置および進行方位と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、前記表示手段に当該修正した現在位置を地図上に表示させる。
【発明の効果】
【0010】
このように本発明によれば、車両の旋回の開始を検出した場合に、旋回の開始を検出した後に算出された現在位置に地図上の位置との誤差があるか否かを判定し、誤差がある場合には、車両の旋回後に算出された現在位置を修正するようにしている。
【0011】
そのため、本実施形態によれば、車両が交差点を右左折する場合であっても、視覚上の違和感を与えることなく現在位置を地図上に表示させることをできる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について図面を用いて説明する。
【0013】
最初に本実施形態が適用された車載用ナビゲーション装置の概略構成について図1を用いて説明する。
【0014】
図1は、本発明の実施形態が適用された車載用ナビゲーション装置(以下において単に「ナビゲーション装置」という)の概略構成図である。
【0015】
図示するように、ナビゲーション装置は、演算処理部1と、ディスプレイ2と、地図データ記憶装置3と、音声入出力装置4と、入力装置5と、車輪速センサ6と、地磁気センサ7と、ジャイロ8と、GPS(Global Positioning System)受信装置9と、を有する。
【0016】
演算処理部1は、ナビゲーション装置がユーザに提供する各種情報を処理するための中心的ユニットである。例えば、各種センサ6〜8やGPS受信装置9から出力される情報を基にして現在位置を算出し、算出した現在位置に基づいて、表示に必要な地図データを地図データ記憶装置3から読み出す。その後、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在位置を示すマーク(以下において「現在位置マーク」という)を重ねてディスプレイ2に表示したり、出発地(例えば現在位置)とユーザから指示された目的地とを結ぶ最適な経路を探索し、音声入出力装置4やディスプレイ2を用いてユーザを誘導する。
【0017】
なお、演算処理部1は、後述するように、交差点等で右左折する際に旋回の開始および旋回方向を検出できるように構成されている。そして、演算処理部1は、旋回の開始を検出した場合、検出した現在位置および旋回方向から旋回が終了した際に走行している地図上の道路を推定する。そして、演算処理部1は、推定した道路上に現在位置が徐々に近づいて表示できるように、後述する所定の規則にしたがい、算出した現在位置を修正した上で表示する。
【0018】
ディスプレイ2は、演算処理部1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。また、演算処理部1とディスプレイ2との間の信号S1は、RGB信号やNTSC(National TV Standards Committee)信号で接続するのが一般的である。
【0019】
地図データ記憶装置3は、日本列島の全体図から全国各市町村の詳細図まで多段階の縮尺図に対応した地図データを記憶するユニットであり、例えば、CD−ROMドライブとCD−ROM、DVD−ROMドライブとDVD−ROM、またはHDD等により構成される。
【0020】
ここで地図データの構成を説明する。図2は、地図データ記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。図示するように、地図データ記憶装置3には、地図を複数に分割することで得られるメッシュ領域毎に地図データ310が記憶されている。地図データ310は、メッシュ領域を識別するためのメッシュID311、および、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ312を有する。
【0021】
リンクデータ312は、リンクを識別するためのリンクID3121、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報3122、リンクを含む道路の種別情報3123、リンクの長さを示すリンク長情報3124、リンクの旅行時間(或いは移動時間)情報3125、2つのノード(開始ノード、終了ノード)にそれぞれ接続するリンクのリンクID(接続リンクID)3126、および道路幅情報(図示せず)、リンクの方位を示す情報(リンク方位)などを有する。また、地図データ310には、対応するメッシュ領域に含まれている道路以外の地図構成物の情報(名称、種別、座標情報など)も含まれている。
【0022】
図1に戻り、説明を続ける。音声入出力装置4は、演算処理部1で生成したユーザへのメッセージを音声信号に変換して出力すると共に、ユーザが発した声を認識し、デジタルデータに変換して演算処理部1にその内容を転送する。
【0023】
入力装置5は、ナビゲーション装置の各種機能選択、目的地設定等のユーザからの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ2上に貼られたタッチパネルなどで構成される。
【0024】
センサ6〜8およびGPS受信装置9は、ナビゲーション装置が現在位置および進行方向を算出するために使用するものである。車輪速センサ6は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。地磁気センサ7は、地球が保持している磁気を検知し、移動体が向かっている方角を検出する。ジャイロ8は、光ファイバジャイロや振動ジャイロで構成され、移動体が回転した角度を検出する。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0025】
続いて、上述したナビゲーション装置の演算処理部1が有する機能について図3を用いて説明する。図3は、演算処理部1の機能構成を説明するための図である。
【0026】
図示するように、演算処理部1は、設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、およびグラフィックス処理部19を有する。
【0027】
設定部10は、入力装置5および音声入出力装置4に入力されたユーザからの要求を受け付け、その要求された内容に対応する処理が実行されるように演算処理部1を制御する。例えば、ユーザが、入力装置5を介して目的地に向うための推奨経路の探索を要求した場合、出発地(または現在位置)から目的地までの経路を探索する処理を経路探索部15に要求する。
【0028】
現在位置検出部11は、車輪速センサ6で計測される距離パルスデータS5およびジャイロセンサ8で計測される角速度データS7を各々積分した結果得られる距離データおよび角度データを用いて、そのデータを時間軸で積分していくことにより、初期値(X,Y)から自車走行後の位置である現在位置(X´,Y´)および車両の進行方向を定期的に算出する。現在位置を算出する間隔について特に限定しないが、例えば、現在位置検出部11は、距離データを用いて、車両が「20m」走行したと判定する度に現在位置を算出するようにしてもよい。なお、現在位置検出部11は、自車の回転した角度と進む方向との関係を一致させるため、地磁気センサ7から得られた方位データS6と、ジャイロ8から得られ角速度データS7を積分した角度データを参照して、自車が進行している方向(車両方位)の絶対方位を推定する。そして、現在位置検出部11は、初期値(X,Y)と、検出された走行距離(距離データ)および検出された車両方位(角度データ)とを用いて現在位置(X´,Y´)を求める。
【0029】
なお、車輪速センサ6のデータS5およびジャイロ8のデータS7を各々積分していくと、誤差が蓄積するため、ある時間でGPS受信装置9から得られた位置データS8をもとに蓄積した誤差をキャンセルする処理を施す。
【0030】
現在位置検出部11は、上記算出した現在位置を示すデータを地図表示処理部18に出力する。また、現在位置検出部11は、現在位置を算出した場合、所定の割合(例えば10回に1回)で、マップマッチ処理部13にマップマッチング処理を行わせる。現在位置検出部11は、マップマッチ処理部13からマップマッチング処理された現在位置を取得する。そして、現在位置検出部11は、マップマッチングされた現在位置を地図表示処理部18に出力する。
【0031】
なお、現在位置検出部11は、センサ6〜8およびGPS受信装置9からのデータS5〜S8に基づいて、自車が旋回を開始こと、および旋回方向を検出する処理を行う。そして、現在位置検出部11は、旋回を検出した際、所定の要件を満たすことを要件として、算出した現在位置を修正した上で、地図表示処理部18に出力する。
【0032】
データ読込部12は、ディスプレイ2に表示が要求される領域や、経路探索のために要求される領域(出発地および目的地を含む)にある地図データ310を、地図データ記憶装置3から読み込む。
【0033】
経路誘導部16は、後述する経路探索部15が探索した推奨経路と、現在位置検出部11が検出した現在位置とを比較し、交差点を通過する前に直進すべきか、右左折すべきかを音声入出力装置4を用いて音声でユーザに知らせたり、ディスプレイ2に表示された地図上に進行すべき方向を表示してユーザに推奨経路を通知する。
【0034】
マップマッチ処理部13は、現在位置検出部11が定期的に出力する現在位置を取得する。マップマッチ処理部13は、データ読込部12が読込んだ現在位置周辺の地図データ310と、後述する軌跡記憶部14に記憶されている走行軌跡とを互いに照らし合わせ、形状の相関が最も高い道路(リンク)上に、現在位置マークが表示できるように、現在位置検出部11から定期的に出力される現在位置を補正する。マップマッチ処理部13は、補正した現在位置を示すデータを現在位置検出部11に出力する。
【0035】
軌跡記憶部14は、マップマッチ処理部13でマップマッチ処理が施された現在位置の情報を、軌跡データとして自車が所定距離を走行する度に記憶する。この軌跡データは、これまで走行してきた道路について、対応する地図上の道路に軌跡マークを描画するために用いられる。
【0036】
経路探索部15は、ダイクストラ法等を用いて、指定された2地点(現在位置、目的地)を結ぶ最適なコストで目的地に到達する経路を、地図データ310(図2参照)を用いて探索する。経路探索部15は、上記探索の結果得られた経路を推奨経路として、ディスプレイ2に表示させるために地図表示処理部18に出力する。
【0037】
地図表示処理部18は、ディスプレイ2に表示が要求される領域にある地図データ310を地図データ記憶装置3からデータ読込部12を介して受け取る。地図表示処理部18は、経路探索部15から探索した経路を受け取る。また、地図表示処理部18は、現在位置検出部11から検出された現在位置を示すデータを取得する。そして、地図表示処理部18は、道路、その他の地図構成物、現在位置マーク、目的地、および経路誘導のための矢印といったマーク等をディスプレイ2の画面に描画させるための地図描画コマンドを生成し、グラフィックス処理部19に出力する。
【0038】
メニュー表示処理部17は、設定部10から出力される命令を受け、グラフィックス処理部19が、様々な種類のメニューやグラフなどをディスプレイ2の画面に描画するようにメニュー描画コマンドを生成する。
【0039】
グラフィックス処理部19は、地図表示処理部18およびメニュー表示処理部17で生成されたコマンド(地図描画コマンド、メニュー描画コマンド)に基づいて、ディスプレイ2の画面上に画像データを表示させる。
【0040】
続いて、演算処理部1のハードウェア構成を説明する。図4は、演算処理部1のハードウェア構成を示す図である。
【0041】
図示するように、演算処理部1は、CPU(中央演算処理装置)21と、CPU21が実行するプログラムやデータを一時的に記憶するRAM(Random Access Memory)22と、上記各部(設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、グラフィックス処理部19)が有する機能を実行するためのプログラムが予め記憶されているROM(Read Only Memory)23と、メモリ間およびメモリと各デバイスとの間のデータを転送するDMA(Direct Memory Access)24と、グラフィック描画を実行し且つ表示制御を行う描画コントローラ25と、グラフィックスイメージデータを蓄えるVRAM(Video Random Access Memory)26と、イメージデータをRGB信号に変換するカラーパレット27と、アナログ信号をデジタル信号に変換するA/D変換器28と、シリアル信号をバスに同期したパラレル信号に変換するSCI(Serial Communication Interface)29と、パラレル信号をバスに同期させてバス上に載せるPIO(Parallel Input/Output)30と、パルス信号を積分するカウンタ31と、を有する。
【0042】
上述した各部(設定部10、現在位置検出部11、データ読込部12、マップマッチ処理部13、軌跡記憶部14、経路探索部15、経路誘導部16、メニュー表示処理部17、地図表示処理部18、グラフィックス処理部19)の機能は、CPU21が、ROM23に記憶されている上記各部が有する機能を実行するためのプログラを、RAM22にロードし、実行することにより実現される。
【0043】
続いて、本実施形態のナビゲーション装置が行う現在位置表示処理について、図5を用いて説明する。図5は、本実施形態のナビゲーション装置の現在位置表示処理のフローを説明するための図である。
【0044】
先ず、現在位置検出部11は、所定の間隔で現在位置および車両の進行方位を算出する(S100)。次に、現在位置検出部11は、算出した現在位置および車両の進行方向を示すデータと、データ読込部12を介して取得した現在位置周辺の地図データ310とから、現在位置が交差点から所定距離の範囲内であるか否かの判定を行う(S101)。そして、現在位置検出部11は、検出した現在位置が交差点から所定距離の範囲内に入っていないと判定した場合、S110の処理に進む。一方、現在位置検出部11は、検出した現在位置が交差点から所定距離の範囲内に在ると判定した場合、S102の処理に進む。
【0045】
なお、本実施形態では、上記交差点からの所定距離の具体的な数字については特に限定しない。例えば、所定距離を「50m」と設定しておくようにしてもよい。この場合、現在位置検出部11は、現在位置が交差点から「50m」以内に入ったと判断した場合、S101に進み、現在位置が交差点から「50m」以内に入っていないと判断した場合、S110に進む。
【0046】
S110では、現在位置検出部11は、従来技術の現在位置表示処理を行い、S100の処理に戻る。具体的には、現在位置検出部11は、S100で検出した現在位置を地図表示処理部18に出力する。また、現在位置検出部11は、所定の割り合(例えば10回に1度)でマップマッチ処理部13にマップマッチグ処理を行なわせ、マップマッチング処理された現在位置を地図表示処理部18に出力する。地図表示処理部18は、取得した現在位置と、データ読込部12が読込んだ地図データ310を用いて、地図上に現在位置を示す画面を生成し、生成した画面をディスプレイ2に表示する。
【0047】
続いて、S101において、現在位置検出部11が、S100で算出した現在位置が交差点から所定距離の範囲内に在ると判定した場合に行う処理について説明する。
【0048】
S102では、現在位置検出部11は、S100で算出した現在位置を地図上に示した画面を、地図表示処理部18を介してディスプレイ2に表示して、S103の処理に進む。
【0049】
S103では、現在位置検出部11は、車両が所定距離(例えば10m)を走行する間に、車両が旋回したか否かの監視を行う。現在位置検出部11は、旋回を検出した場合にS104に進み、旋回を検出しない場合にS100の処理に戻る。なお、車両が所定距離(例えば10m)を走行する間に旋回を検出しない場合、S100の処理に戻るようにしたのは、車両が十字路等を右左折しないで直進する場合があることを考慮したためである。
【0050】
S104では、S100で検出した現在位置および進行方位と、旋回を検出した際に取得した旋回方向と、地図データとを用いて、上記現在位置に対して進行方向にあるノード(現在位置の属するリンクの終了ノード)に繋がるリンク(道路)を全て抽出し、S105の処理に進む。
【0051】
S105では、現在位置検出部11は、上記抽出したリンクの中から、S102で取得した旋回方向を用いて、該旋回方向に位置する一のリンク(道路)を特定する。
【0052】
そして、現在位置検出部11は、交差点における現在位置表示処理(図6の処理フロー)を行う。現在位置検出部11は、交差点における現在位置表示処理(図6の処理フロー)が終了した後、S100の処理に戻る。
【0053】
続いて、本実施形態の交差点における現在位置表示処理を図6〜図8を用いて説明する。図6は、本実施形態のナビゲーション装置が行う、車両が交差点を通過する際の現在位置表示処理のフロー図である。図7および図8は、現在位置検出部11が行う現在位置の補正処理を説明するための図である。なお、図7および図8に示す、1100は、図6のS100で算出された現在位置を示し、1201〜1203は、車両の旋回を検出後に現在位置検出部11が算出した現在位置を示すものとする。
【0054】
先ず、現在位置検出部11は、S100で算出された現在位置1100(図7参照)の次に車両が位置すると推定される現在位置1200および車両方位「θ1」を算出する(S200)。次に、現在位置検出部11は、S200で算出した現在位置をディスプレイ2に表示して(S201)、S202の処理に進む。
【0055】
S202では、現在位置検出部11は、上記の表示した現在位置1200の次に車両が位置すると推定される現在位置1201および車両方位「θ2」を算出する。
【0056】
続いて、現在位置検出部11は、S200およびS202で求めた現在位置1200、1201、車両方位「θ1」、「θ2」、上述したS105で推定したリンク1001、および地図データを用いて、以下に示す(式1)〜(式3)により求められる「θLc」、「θdiff」、「Ldiff」を算出する。
θLc=θn−θL…(式1)
θdiff=θn+1−θn…(式2)
Ldiff=Ln−Ln+1…(式3)
具体的には、現在位置検出部11は、地図データを用いてリンク1001のリンク方位(θL)を特定し(図7参照)、算出した車両方位「θ1」および特定したリンク方位(θL)を、上記(式1)に代入して「θLc」を求める。また、現在位置検出部11は、車両方位「θ1」および「θ2」を、上記(式2)に代入して「θdiff」を求める。なお、ここでは、「n=1」であるため、「θLc」は、「θ1−θL」により求められる。また、「θdiff」は、「θ2−θ1」により求められる。
【0057】
また、現在位置検出部11は、現在位置1200、1201、リンク1001、および地図データを用いて、現在位置1200からリンク1001に引いた垂線距離「Ln(ここでは、L1を求める)」を算出する。また、現在位置検出部11は、現在位置1201からリンク1001に引いた垂線距離「Ln+1(ここでは、L2を求める)」を算出する。現在位置検出部11は、算出した「Ln」および「Ln+1」を、上記(式3)に代入して「Ldiff」を求める。なお、ここでは、「n=1」であるため、「Ldiff」は、「L1−L2」により求められる。
【0058】
続いて、現在位置検出部11は、算出した現在位置1200、1201が誤差を含まない正確な位置であるか否かを判定する。具体的には、現在位置検出部11は、S203で求めた「θLc」、「θdiff」、「Ldiff」、および「Ln+1(ここでは、L2)」を以下の(式4)に代入する。現在位置検出部11は、上記の(式4)を満たすか否かの判定を行う。これは、上記(式4)を満たさない場合に、算出した現在位置に地図上の位置との誤差が含まれていると考えられるためである。そして、現在位置検出部11は、(式4)を満たす場合、S210の処理に進み、当該(式4)を満たさない場合、S205〜206の処理に進む(S204)。
θLc/θdiff=Ln+1/Ldiff…(式4)
ここで、図8を用いて、現在位置検出部11が上記(式4)を満たすと判定した場合の現在位置表示処理と、満たさないと判定した場合の現在位置表示処理とを説明する。図8では、(a)および(b)図に(式4)を満たさない場合の例を示し、(c)図に(式4)を満たす場合の現在位置を示している。
【0059】
図8(a)図は、上記(式4)を満たさない場合であって、かつ以下の(式)5を満たす場合の現在位置1200〜1202を示している。具体的には、(式4)を満たさない場合であって、かつ以下の(式5)を満たす場合、現在位置算出部11が算出した現在位置をそのまま地図上に表示した場合、車両の現在位置がオーバシュートして表示されてしまう。
【0060】
また、図8(b)図は、上記(式4)を満たさない場合であって、かつ以下の(式)6を満たす場合の現在位置1200〜1202を示している。そして、(式4)を満たさない場合であって、かつ以下の(式)6を満たす場合、現在位置検出部11が算出した現在位置1200〜1202をそのまま地図上に表示した場合、車両の現在位置がアンダーシュートして表示されてしまう。
θLc/θdiff>Ln+1/Ldiff…(式5)
θLc/θdiff<Ln+1/Ldiff…(式6)
そして、オーバシュート或いはアンダーシュートした現在位置を表示した場合、交差点を右左折する際、利用者に視覚上の違和感を与えてしまう。また、オーバシュート或いはアンダーシュートの結果、道路上から外れた位置に表示している現在位置をマップマッチング処理で道路上の位置に戻した場合、現在位置が道路上から外れた位置から道路上に飛び移り表示されることになり、利用者に視覚上の違和感を与えてしまう。
【0061】
なお、上記(式4)を満たす場合、現在位置検出部11が求めた現在位置の測位誤差が少ないと考えられる。そして、現在位置検出部11が算出する現在位置が上記(式4)を満たす場合、その現在位置は、オーバシュート或いはアンダーシュートして表示されることなく、S105で推定したリンク上の位置に至るようになる(図8(c))。
【0062】
このように、上記(式4)を満たすか否かを判定することにより、現在位置がオーバシュート(或いはアンダーシュート)して表示されるか否かを判断することができる。そのため、本実施形態の現在位置検出部11は、上記(式4)を満たさない場合、S202で算出した現在位置を補正して、補正した現在位置を用いて地図上に現在位置を表示するようにしている(S205〜206)。
【0063】
より、具体的には、(式4)を満たさず、かつ(式5)を満たす場合、S205では、現在位置検出部11は、S202で算出した車両の進行方位「θ2」より大きい値の「θ2´」を求める(例えば、S202で算出した車両の進行方位「θ2」に所定の値を加算して「θ2´」を求める)。現在位置検出部11は、S200で求めた現在位置1200と、センサから求めた車両の走行距離と、「θ2´」、および地図データ等を用いて、新たな現在位置1301を算出する(図8(a)図参照)。
【0064】
また、(式4)を満たさず、かつ(式6)を満たす場合、S205では、現在位置検出部11は、S202で算出した車両の進行方位「θ2」より小さい値の「θ2”」を求める(例えば、S202で算出した車両の進行方位「θ2」に所定の値を減算して「θ2”」を求める)。現在位置検出部11は、S200で求めた現在位置1200、センサから求めた車両の走行距離、「θ2”」、および地図データ等を用いて、新たな現在位置1301を算出する(図8(b)図参照)。なお、S205において、上記の「θ2´」および「θ2”」を求めるための具体的な手順については特に限定しない。例えば、現在位置検出部11は、上記(式4)を満たすように「θ2´」および「θ2”」を算出する。
【0065】
また、S204で、上記(式4)を満たすと判定された場合、算出された現在位置は、誤差が小さいと考えられる。そのため、S202で算出された現在位置を用いて、地図上に現在位置を表示する(S210)。
【0066】
S207では、現在位置検出部11は、S206で表示した現在位置(またはS210で表示した現在位置)がS105で推定したリンク上に在るか否かを判定し、当該リンク上に在る場合に処理を終了する。一方、現在位置検出部11は、上記リンク上にない場合、次の位置する現在位置および進行方位を算出する(S208、202)。ここでは、現在位置1201の後の現在位置1202、および「θ3」を求める(図7参照)。そして、上述したS203以降の処理を繰り返す。
【0067】
このように、本実施形態によれば、車両が交差点を右左折する際、測位誤差により、正確な現在位置を算出できなかった場合、現在位置を補正した上で地図上に表示するようにしている。また、本実施形態では、車両が交差点を右左折した場合には、マップマッチング処理を行わない。
【0068】
したがって、本実施形態によれば、交差点を右左折する際に、測位誤差等により、正確な現在位置を算出できない場合でも、現在位置を補正した位置に表示するため、利用者に交差点を走行する際に視覚上の違和感を与えることがない。
【0069】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、上記図5に示すフローでは、S101において、検出した現在位置が交差点から所定距離の範囲内か否かを判断するようにしているが、特にこれに限定するものではない。例えば、旋回を検知するまでは、従来技術の現在位置マーク表示を行い、旋回を検知した際にS104〜106の処理を行うようにしてもよい。
【0070】
また、本実施形態では、自車位置検出部11の旋回開始を検出する手段について、センサ6〜8およびGPS受信装置9からのデータS5〜S8を利用する場合について説明しているが、これは例示に過ぎない。例えば、車両の運転ハンドルにハンドルの回転を検出する回転センサを設けておく。そして、上記回転センサにより旋回開始を検知するようにしてもよい。
【0071】
また、本実施形態では、ディスプレイ2に表示させる地図データ310についてナビゲーション装置が有する地図データ記憶装置3が記憶している場合を例に説明したが、特にこれに限定するものではない。例えば、車載用ナビゲーション装置に、外部とデータ通信を行う通信部を設けておいて、該通信部を用いて、地図データ310を外部から取得するようにしてもよい。
【図面の簡単な説明】
【0072】
【図1】本発明の実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の地図データ記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。
【図3】本発明の実施形態の演算処理部1の機能構成を説明するための図である。
【図4】本発明の実施形態の演算処理部1のハードウェア構成を示す図である。
【図5】本発明の実施形態のナビゲーション装置の現在位置表示処理のフローを説明するための図である。
【図6】本発明の実施形態のナビゲーション装置が行う、交差点を右折する際の現在位置マークの表示を説明するための図である。
【図7】本発明の実施形態のナビゲーション装置が行う、車両が交差点を通過する際の現在位置表示処理のフロー図である。
【図8】本実施形態の現在位置検出部11が行う現在位置の補正処理を説明するための図である。
【符号の説明】
【0073】
1…演算処理部、2…ディスプレイ、3…地図データ記憶装置、4…音声入出力装置、5…入力装置、6…車輪速センサ、7…地磁気センサ、8…ジャイロ、9…GPS受信装置、10…設定部、11…現在位置検出部、12…データ読込部、13…マップマッチ処理部、14…軌跡記憶部、15…経路探索部、16…経路誘導部、17…メニュー表示処理部、18…地図表示処理部、19…グラフィックス処理部、21…CPU、22…RAM、23…ROM、24…DMA、25…描画コントローラ、26…VRAM、27…カラーパレット、28…A/D変換器、29…SCI、30…PIO、31…カウンタ、1100…現在位置マーク
【特許請求の範囲】
【請求項1】
2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置であって、
車両の進行方位を検出する手段と、
車両の走行距離を算出する手段と、
車両の旋回の開始および旋回方向を検出する検出手段と、
前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出する現在位置算出手段と、
前記算出した現在位置を用いて、該現在位置を地図上に表示する表示手段とを有し、
前記現在位置算出手段は、
前記検出手段が検出した旋回の開始および旋回方向を示すデータを受付けた場合、前記地図データを用いて前記算出した現在位置の進行方位にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、
前記旋回の開始を検出した後に算出された現在位置および進行方向と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、
前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、前記表示手段に当該修正した現在位置を地図上に表示させること
を特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記算出した現在位置を算出する際に利用した進行方位の値を所定の規則にしたがい修正し、当該現在位置の1つ前の現在位置と、前記修正した進行方位および前記走行距離に基づき得られた相対変位とを用いて現在位置を算出し、当該算出した現在位置を前記修正した現在位置とすること
を特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置であって、
前記算出した現在位置および進行方位と、前記地図データとを用いて、当該現在位置が交差点から所定距離の範囲内にあるか否かを判定する手段を有し、
前記現在位置算出手段は、
前記現在位置が交差点から所定距離の範囲内にあると判定された場合に、前記検出手段から前記旋回の開始および旋回方向を示すデータを受付けること
を特徴とするナビゲーション装置。
【請求項4】
2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置が行う現在位置表示方法であって、
前記ナビゲーション装置は、
車両の進行方位を検出するステップと、
車両の走行距離を算出するステップと、
車両の旋回の開始および旋回方向を検出するステップと、
前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出するステップと、
前記算出した現在位置を用いて、該現在位置を地図上に表示するステップとを行い、
前記現在位置を算出するステップは、
前記旋回の開始および旋回方向が検出された場合、前記地図データを用いて前記算出した現在位置の進行方向にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、
前記旋回の開始を検出した後に算出された現在位置および進行方位と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、
前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、当該修正した現在位置を地図上に表示させること
を特徴とする現在位置表示方法。
【請求項1】
2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置であって、
車両の進行方位を検出する手段と、
車両の走行距離を算出する手段と、
車両の旋回の開始および旋回方向を検出する検出手段と、
前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出する現在位置算出手段と、
前記算出した現在位置を用いて、該現在位置を地図上に表示する表示手段とを有し、
前記現在位置算出手段は、
前記検出手段が検出した旋回の開始および旋回方向を示すデータを受付けた場合、前記地図データを用いて前記算出した現在位置の進行方位にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、
前記旋回の開始を検出した後に算出された現在位置および進行方向と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、
前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、前記表示手段に当該修正した現在位置を地図上に表示させること
を特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記算出した現在位置を算出する際に利用した進行方位の値を所定の規則にしたがい修正し、当該現在位置の1つ前の現在位置と、前記修正した進行方位および前記走行距離に基づき得られた相対変位とを用いて現在位置を算出し、当該算出した現在位置を前記修正した現在位置とすること
を特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置であって、
前記算出した現在位置および進行方位と、前記地図データとを用いて、当該現在位置が交差点から所定距離の範囲内にあるか否かを判定する手段を有し、
前記現在位置算出手段は、
前記現在位置が交差点から所定距離の範囲内にあると判定された場合に、前記検出手段から前記旋回の開始および旋回方向を示すデータを受付けること
を特徴とするナビゲーション装置。
【請求項4】
2つのノードで結ばれている、地図上の道路を構成する各リンクのリンクデータを含む地図データを用いて、現在位置を地図上に表示するナビゲーション装置が行う現在位置表示方法であって、
前記ナビゲーション装置は、
車両の進行方位を検出するステップと、
車両の走行距離を算出するステップと、
車両の旋回の開始および旋回方向を検出するステップと、
前回の車両の現在位置と、前記進行方位および前記走行距離に基づき得られた相対変位とを用いて、車両の現在位置を算出するステップと、
前記算出した現在位置を用いて、該現在位置を地図上に表示するステップとを行い、
前記現在位置を算出するステップは、
前記旋回の開始および旋回方向が検出された場合、前記地図データを用いて前記算出した現在位置の進行方向にあるノードに繋がるリンクを少なくとも1つ抽出し、前記検出した旋回方向に基づいて、該抽出したリンクの中から一のリンクを特定し、
前記旋回の開始を検出した後に算出された現在位置および進行方位と、当該現在位置から前記特定したリンクまでの垂線距離とを用いて、当該算出した現在位置に地図上の位置との誤差が含まれているか否かを判定し、
前記誤差が含まれていると判定した場合、前記算出した現在位置を修正した現在位置を求め、当該修正した現在位置を地図上に表示させること
を特徴とする現在位置表示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−208156(P2006−208156A)
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願番号】特願2005−19842(P2005−19842)
【出願日】平成17年1月27日(2005.1.27)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願日】平成17年1月27日(2005.1.27)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]