
ナビゲーション装置および目的地候補情報提示方法
【課題】所望の目的地を過去の設定目的地履歴から選択して設定する場合に、選択対象として提示する目的地候補の数を絞ってユーザの選択を容易にするとともに、その絞った目的地候補の中に、ユーザが目的地として設定する可能性の高い地点をより高い確度で含ませることが可能な「ナビゲーション装置および目的地候補情報提示方法」を提供する。
【解決手段】目的地と、目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報から、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を取得し、当該取得した目的地を目的地候補情報として提示することにより、自車位置から自車進行方向に走行して到達した過去の目的地のみが目的地候補として提示されるようにする。
【解決手段】目的地と、目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報から、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を取得し、当該取得した目的地を目的地候補情報として提示することにより、自車位置から自車進行方向に走行して到達した過去の目的地のみが目的地候補として提示されるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路誘導機能を備えたナビゲーション装置および目的地候補情報提示方法に関する。
【背景技術】
【0002】
一般に、車両の走行案内を行うナビゲーション装置は、単に現在地周辺の地図を表示するのみでなく、目的地を指定することにより、現在地から目的地までの誘導経路を自動設定して案内する機能を備えている。この経路誘導機能では、地図データを用いて現在地から目的地までを結ぶ最もコストが小さな経路を、幅優先探索(BFS)法あるいはダイクストラ法などのシミュレーションを行って自動探索し、その探索した経路を誘導経路として設定する。
【0003】
誘導経路の設定後は、車両の走行中に地図画像上で誘導経路を他の道路と識別可能なように色を変えて太く描画する。また、車両が誘導経路上の案内交差点から所定距離内に近づいたときに、交差点案内図(交差点拡大図とこの交差点での進行方向を示す矢印)を表示したり、進行方向を音声で案内したりするなどの交差点案内を行うことにより、運転者を目的地まで案内するようになっている。
【0004】
この種の車載用ナビゲーション装置では、通常、いくつかの目的地設定方法が用意されている。例えば、住所入力、50音入力、電話番号入力、郵便番号入力などにより、特定の地点を検索するようにしたものが知られている。さらに、過去に目的地として設定した地点で構成される目的地履歴リストから所望の地点を選択することにより、目的地を設定する方法も知られている。
【0005】
ところで、ユーザは、過去に誘導経路を設定して行ったことのある地点に再度行く場合には、過去の記憶を頼りにして(すなわち、経路誘導機能を今回は利用せずに)当該地点に向かって車両を走行させることがある。この場合、目的地まで無事に辿り着ければ良いが、途中で目的地へ行くための経路がわからなくなってしまうことがある。道に迷ったユーザは、その時点で誘導経路を設定しようとする。このときユーザは、住所入力や50音入力、電話番号入力などの方法によって目的地を設定することも可能であるが、目的地履歴リストから選択することも可能である。
【0006】
ところが、目的地履歴リストから所望の地点を選択することによる設定方法では、過去に目的地として設定した全ての地点がリスト表示される。このため、現時点で目的地として設定する可能性のない地点もリスト表示されてしまい、ユーザにとって必要以上の地点を含んだリストが表示される可能性があるという問題があった。
【0007】
この問題に対して、過去に目的地の設定操作を行った操作地点のうち自車両の現在位置から所定の範囲内に存在する地点を抽出し、当該抽出した操作地点において過去に目的地として設定した地点のみを目的地候補として抽出する技術が提案されている(例えば、特許文献1を参照)。この特許文献1に記載の技術によれば、目的地設定履歴に登録されている目的地の中から自車両の現在位置を考慮した地点の抽出が可能となり、ユーザが必要とする可能性の高い地点のみを目的地候補として表示することができる。
【特許文献1】特開2006−23149号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載の技術では、過去に目的地として設定された地点のうち実際にリスト表示される地点は、過去に目的地の設定操作を行ったことのある操作地点のうち、自車両の現在位置から所定の範囲内に存在する地点のみに限られる。ここで目的地候補の抽出キーとして用いている操作地点情報は、単にその操作地点において目的地の設定操作を行ったことがある事実を示すにすぎない情報である。そのため、当該操作地点情報を用いて目的地候補を抽出しても、ユーザが本当に目的地として設定するのに必要な地点が抽出されない可能性があるという問題があった。
【0009】
本発明は、このような問題を解決するために成されたものであり、過去に設定した目的地履歴から所望の目的地を選択して設定する場合に、選択対象として提示する目的地候補の数を絞ってユーザの選択を容易にするとともに、その絞った目的地候補の中に、ユーザが目的地として設定する可能性の高い地点をより高い確度で含ませることができるようにすることを目的とする。
【課題を解決するための手段】
【0010】
上記した課題を解決するために、本発明では、目的地と、目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を走行軌跡情報記憶部に記憶しておく。そして、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部から取得し、当該取得した目的地を目的地候補情報として提示するようにしている。
【発明の効果】
【0011】
上記のように構成した本発明によれば、過去に設定された目的地の履歴の中から、現在の自車位置に対応する道路リンクを現在の自車進行方向に走行して到達した目的地のみが目的地候補として抽出される。このため、過去に設定した目的地履歴から所望の目的地を選択して設定する場合に、選択対象として提示する目的地候補の数を絞ってユーザの選択を容易にすることができる。また、過去の記憶を頼りに目的地に向かって走行している途中でその先の道が分からなくなってしまった場合に、現在走行している道路を走行履歴とする過去の設定目的地が目的地候補として提示されるので、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませることができる。
【発明を実施するための最良の形態】
【0012】
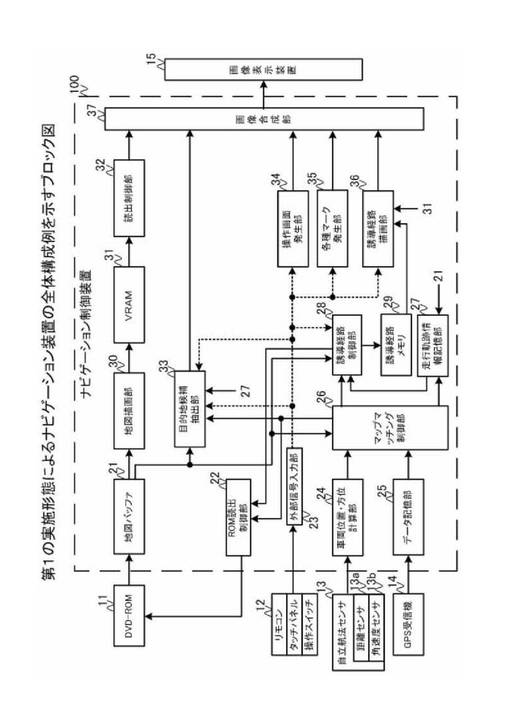
以下、本発明の第1の実施形態を図面に基づいて説明する。図1は、第1の実施形態によるナビゲーション装置の全体構成例を示すブロック図である。図1において、100はナビゲーション制御装置であり、ナビゲーション装置の全体を制御する。11はDVD−ROM等の記録媒体であり、地図表示や経路探索等に必要な各種の地図データを記憶している。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM11を用いているが、CD−ROM、ハードディスク、半導体メモリ等の他の記録媒体を用いても良い。
【0013】
DVD−ROM11に記録された地図データには、地図表示や経路探索、マップマッチング等の各種処理に使用する道路ユニットのデータが含まれている。道路ユニットのデータは、道路や車線等に対応する道路リンクに関する情報と、当該道路リンクの両端に当たるノードに関する情報とを含んでいる。
【0014】
12はリモコン、タッチパネルまたは操作スイッチ等の操作部であり、ユーザがナビゲーション制御装置100に対して各種の情報(例えば、経路誘導の目的地や経由地)を設定したり、各種の操作(例えば、メニュー選択操作、地図の拡大/縮小操作、手動地図スクロール、数値入力など)を行ったりするためのものである。過去に設定した目的地の履歴から所望の目的地を検索する操作(以下、目的地履歴検索操作という)等も、この操作部12により行うことができる。
【0015】
13は車両の現在位置を測定するための自立航法センサであり、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する距離センサ(車速センサ)13aと、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)13bとを含んでいる。自立航法センサ13は、これらの距離センサ13aおよび角速度センサ13bによって車両の相対位置および方位を検出し、その情報をナビゲーション制御装置100に出力する。
【0016】
14は車両の現在位置を測定するためのGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ(図示せず)で受信し、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、GPS受信機14は、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にナビゲーション制御装置100に出力する。
【0017】
15は画像表示装置であり、ナビゲーション制御装置100の制御によって生成された画像を表示する。この画像表示装置15の画面上には、自車位置を含む範囲の地図画像が車両位置マークや各種ランドマーク等と共に表示される。また、この地図画像上には、誘導経路が表示されるとともに、車両の位置が誘導経路上の案内交差点近傍に近づいたときに交差点拡大図が表示される。また、目的地履歴検索操作が操作部12により行われた場合には、後述する目的地候補抽出部33の処理によって抽出された目的地が目的地候補情報として画像表示装置15の画面上に表示される。
【0018】
次いで、ナビゲーション制御装置100の内部構成において、21は地図バッファであり、DVD−ROM11から読み出された地図データを一時的に格納する。22はROM読出制御部であり、DVD−ROM11からの地図データの読み出しを制御する。このROM読出制御部22は、後述するマップマッチング制御部26からマップマッチング処理後の車両現在位置情報を入力する。そして、その車両現在位置を含む所定範囲の地図データの読み出し指示を出力する。これによりROM読出制御部22は、地図表示に必要な地図データをDVD−ROM11から読み出して、地図バッファ21に格納する。
【0019】
23は外部信号入力部であり、操作部12からその操作状態に応じた操作信号を入力する。24は車両位置・方位計算部であり、自立航法センサ13から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。25はデータ記憶部であり、GPS受信機14から出力される自車の絶対的な位置および方位のデータを順次格納する。
【0020】
上述のマップマッチング制御部26は、地図バッファ21に読み出されている地図データと、車両位置・方位計算部24により計算された自立航法センサ13に基づく推定車両位置および車両方位のデータと、データ記憶部25に格納されたGPS受信機14による自車位置および車両方位のデータとを用いて、車両走行距離毎に投影法等によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0021】
また、マップマッチング制御部26は、修正後における地図上の自車位置および自車進行方向をそれぞれ示す自車位置情報および自車進行方向情報を所定間隔(一定の時間間隔または距離間隔)で走行軌跡情報記憶部27に出力する。また、マップマッチング制御部26は、目的地履歴検索操作が操作部12により行われたときに、その時点での自車位置情報および自車進行方向情報を目的地候補抽出部33に出力する。
【0022】
走行軌跡情報記憶部27は、誘導経路が設定されている場合において、地図バッファ21に読み出されている地図データと、マップマッチング制御部26より所定間隔で出力される自車位置情報および自車進行方向情報とに基づいて、当該誘導経路の目的地と、自車位置情報により示される自車位置に対応する道路リンクと、自車進行方向情報により示される自車進行方向とを関連付けて走行軌跡情報を生成し、記憶するものである。すなわち、走行軌跡情報は、過去に設定された目的地と、その目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の各道路リンクでの道路進行方向(自車進行方向)とをそれぞれ関連付けた情報である。
【0023】
28は誘導経路制御部であり、地図バッファ21に格納された地図データを用いて、現在地から目的地までを結ぶ最もコストが小さな誘導経路を探索する。29は誘導経路メモリであり、誘導経路制御部28によって探索された誘導経路のデータ(現在地から目的地までのノードの集合)を記憶する。経路探索を行う際に、誘導経路制御部28は、マップマッチング制御部26から出力される現在位置情報を出発地データとして誘導経路メモリ29に設定するとともに、操作部12の操作によって設定された地点を目的地データとして誘導経路メモリ29に設定して、誘導経路の探索を行う。
【0024】
30は地図描画部であり、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する。31はVRAM(ビデオRAM)であり、地図描画部30により生成された地図画像データを一時的に格納する。32は読出制御部であり、VRAM31からの地図画像データの読み出しを制御する。すなわち、地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納され、読出制御部32によって1画面分の地図画像データが読み出される。
【0025】
33は目的地候補抽出部であり、目的地履歴検索操作が操作部12により行われた場合に、自車両の現在位置を含む走行軌跡のうち、当該現在位置に対応する道路リンクの道路進行方向(目的地へ向かった際の進行方向)と自車両の現在進行方向とが一致する走行軌跡の目的地を目的地候補として抽出する。そして、抽出した目的地候補を表す画像データ(目的地候補情報に相当)を生成して画像合成部37に出力する。なお、目的地候補抽出部33が行う処理の詳細については後述する。
【0026】
34は操作画面発生部であり、操作部12を用いて各種の操作を行う際に必要な操作画面を生成して画像合成部37に出力する。35は各種マーク発生部であり、マップマッチング処理された後の自車位置に表示する車両位置マークや、ガソリンスタンドやコンビニエンスストア等を表示する各種ランドマーク等を生成して画像合成部37に出力する。
【0027】
36は誘導経路描画部であり、誘導経路メモリ29に記憶された誘導経路データを使用して、誘導経路の描画データを発生する。すなわち、誘導経路描画部36は、誘導経路メモリ29に記憶された誘導経路データの中から、その時点でVRAM31に描画された地図エリアに含まれるものを選択的に読み出し、地図画像に重ねて他の道路と異なる濃い紫色で太く強調した誘導経路の描画データを生成する。
【0028】
画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補抽出部33、操作画面発生部34、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。これにより、合成された画像が画像表示装置15の画面上に表示される。
【0029】
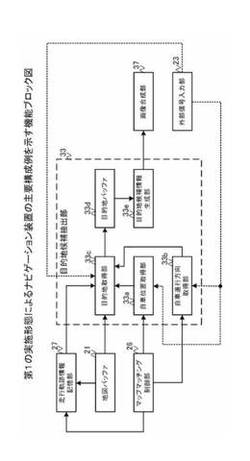
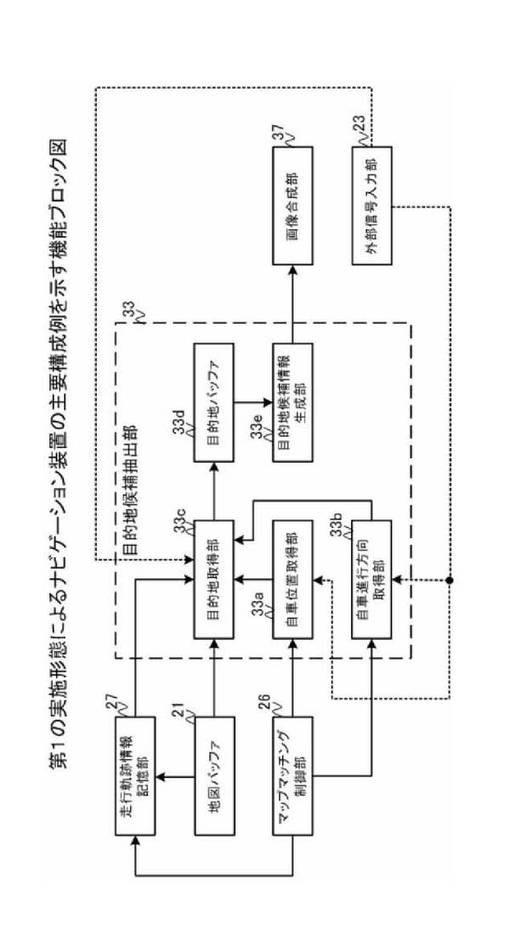
次に、第1の実施形態による目的地候補抽出部33の機能構成について説明する。図2は、第1の実施形態による目的地候補抽出部33の機能構成例を示す機能ブロック図である。図2に示すように、目的地候補抽出部33は、その機能構成として、自車位置取得部33a、自車進行方向取得部33b、目的地取得部33c、目的地バッファ33dおよび目的地候補情報生成部33eを備えている。
【0030】
自車位置取得部33aは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたとき、マップマッチング制御部26から自車位置情報を入力し、目的地取得部33cに出力する。自車進行方向取得部33bは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたとき、マップマッチング制御部26から自車進行方向情報を入力し、目的地取得部33cに出力する。
【0031】
目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けた場合、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0032】
目的地候補情報生成部33eは、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する。そして、目的地候補情報生成部33eは、生成した目的地候補情報を画像合成部37に出力する。なお、目的地候補情報生成部33eおよび画像合成部37は、特許請求の範囲の目的地候補情報提示部に対応する。
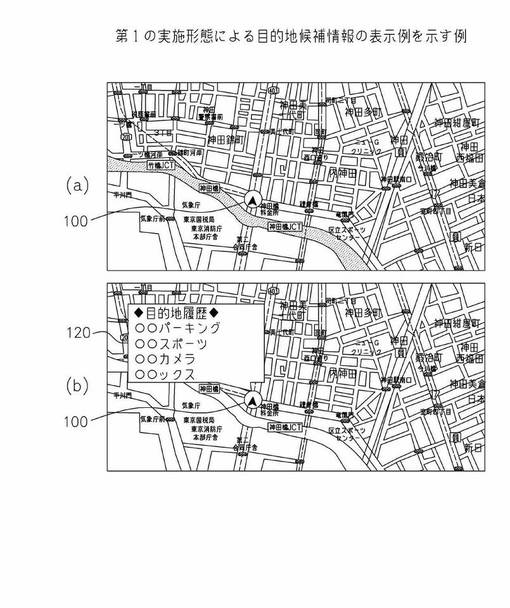
【0033】
ここで、画像表示装置15に表示される目的地候補情報の例を、図3を参照しながら説明する。図3(a)は、車両が例えば神田駅付近を走行しているときの表示例で、現在の自車位置を示す車両位置マーク100が表示されている。図3(b)は、図3(a)の自車位置において目的地履歴検索操作が行われたときの表示例で、現在の自車位置を示す車両位置マーク100の他に、目的地候補情報120が車両位置マーク100の付近に表示されている。目的地候補情報120には、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地があらかじめ定められた順序(例えば、目的地の設定日時順や設定回数順、現在位置からの距離が近い順等)に従って表示されている。
【0034】
誘導経路制御部28は、画像表示装置15に表示されている目的地候補情報により示される目的地の中から何れかの目的地を選択する操作を表す操作信号を外部信号入力部23から受けたとき、当該選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得し、目的地データとして誘導経路メモリ29に格納する。
【0035】
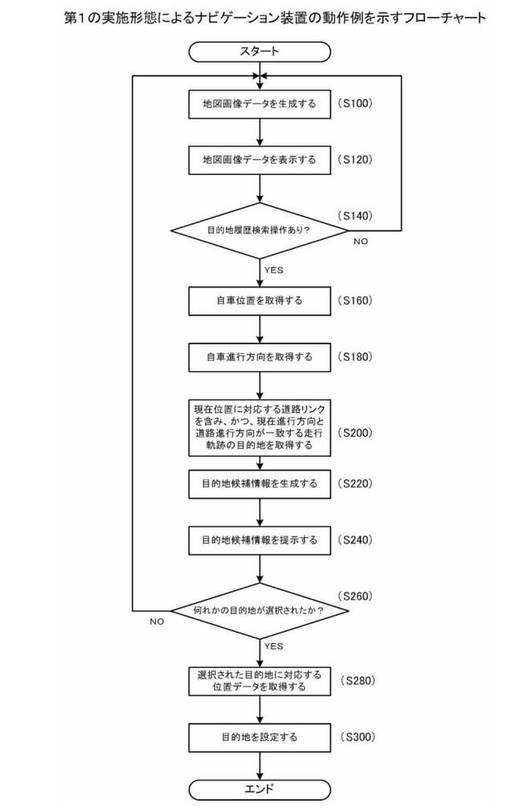
次に、第1の実施形態におけるナビゲーション装置の動作について説明する。図4は、第1の実施形態によるナビゲーション装置の動作例を示すフローチャートである。図4におけるステップS100の処理は、ナビゲーション装置が起動することによって開始する。
【0036】
まず、地図描画部30は、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する(ステップS100)。地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納される。次に、読出制御部32は、VRAM31から1画面分の地図画像データを読み出して画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データを画像表示装置15に出力する(ステップS120)。
【0037】
次に、自車位置取得部33a、自車進行方向取得部33bおよび目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたか否かについて判定する(ステップS140)。もし、目的地履歴検索操作を受けていないと判定した場合(ステップS140にてNO)、処理はステップS100に遷移する。
【0038】
一方、目的地履歴検索操作を受けたと判定した場合(ステップS140にてYES)、自車位置取得部33aは、マップマッチング制御部26から自車位置情報を入力し、目的地取得部33cに出力する(ステップS160)。また、自車進行方向取得部33bは、マップマッチング制御部26から自車進行方向情報を入力し、目的地取得部33cに出力する(ステップS180)。
【0039】
そして、目的地取得部33cは、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する(ステップS200)。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0040】
次に、目的地候補情報生成部33eは、目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する(ステップS220)。そして、目的地候補情報生成部33eは、生成した目的地候補情報を画像合成部37に出力する。次に、画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS240)。
【0041】
次に、誘導経路制御部28は、画像表示装置15に目的地候補情報が表示されてから所定時間の間に、当該目的地候補情報により示される目的地の何れかを選択する操作を外部信号入力部23を介して受けたか否かについて判定する(ステップS260)。もし、何れかの目的地を選択する操作を受けていないと誘導経路制御部28にて判定した場合(ステップS260にてNO)、処理はステップS100に遷移する。
【0042】
一方、何れかの目的地を選択する操作を受けたと誘導経路制御部28にて判定した場合(ステップS260にてYES)、誘導経路制御部28は、選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得する(ステップS280)。最後に、誘導経路制御部28は、走行軌跡情報記憶部27より取得した位置データを目的地データとして誘導経路メモリ29に格納する(ステップS300)。ステップS300の処理が完了することによって、ナビゲーション装置は、図4における処理を終了する。
【0043】
以上詳しく説明したように、第1の実施形態では、目的地履歴検索操作が操作部12により行われた場合に、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を目的地候補として走行軌跡情報記憶部27から取得し、当該取得した目的地に関する目的地候補情報を画像表示装置15に提示するようにしている。
【0044】
このように構成した第1の実施形態によれば、過去の記憶を頼りに目的地に向かっている走行途中でその先の道が分からなくなってしまった場合に、目的地履歴検索を行うと、過去に設定された目的地の履歴の中から、現在位置に対応する道路リンクを現在の自車進行方向に走行して到達した目的地のみが目的地候補として抽出される。このため、目的地候補の数を絞って画像表示装置15に提示することができ、ユーザの選択を容易にすることができる。しかも、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませることができるようになる。
【0045】
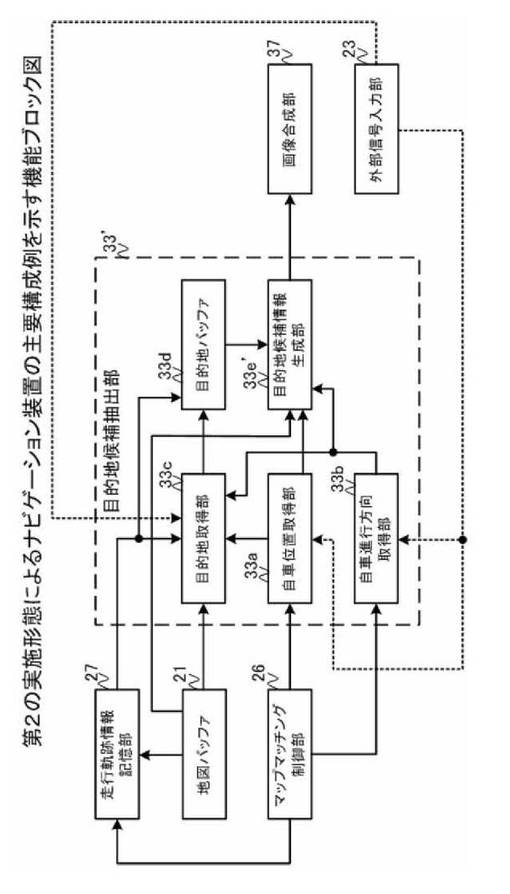
次に、本発明の第2の実施形態を図面に基づいて説明する。第2の実施形態によるナビゲーション装置は、図1の目的地候補抽出部33に代えて目的地候補抽出部33′を備えて構成される。図5は、第2の実施形態による目的地候補抽出部33′の機能構成例を示す機能ブロック図である。なお、この図5において、図2に示した符号と同一の符号を付したものは同一の機能を有するものであるので、ここでは重複する説明を省略する。第2の実施形態において、目的地候補抽出部33′は、図2の目的地候補情報生成部33eに代えて目的地候補情報生成部33e′を備えて構成される。
【0046】
上述した第1の実施形態において、目的地候補情報生成部33eは、図3(b)に示すように、車両位置マーク100の付近に表示させる目的地候補情報120を生成していた。これに対して、第2の実施形態による目的地候補情報生成部33e′は、図6に示すように、現在位置よりも自車進行方向側の先にある交差点や分岐点の付近に表示させる目的地候補情報を生成する。
【0047】
具体的には、目的地候補情報生成部33e′は、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンクに対して複数の道路リンクが接続されているか否か、すなわち、1つ先の道路リンクから複数の道路リンクが分岐しているか否かについて判定する。
【0048】
もし、複数の道路リンクが分岐していると目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、走行履歴情報記憶部27に記憶されている走行軌跡情報に基づいて、分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定する。ここで、異なる走行軌跡が存在すると目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、当該異なる走行軌跡に対応する道路リンクの各々について、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する。
【0049】
そして、目的地候補情報生成部33e′は、異なる走行軌跡に対応する道路リンクの各々について生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、複数の道路リンクの分岐地点付近に、異なる走行軌跡に対応する道路リンクの各々について識別可能に表示する。
【0050】
一方、1つ先の道路リンクから複数の道路リンクが分岐していないと目的地候補情報生成部33e′にて判定した場合、および、複数の道路リンクが分岐している場合でも異なる走行軌跡が存在しないと目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する1つの目的地候補情報を生成する。
【0051】
そして、目的地候補情報生成部33e′は、生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM30から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンク付近に表示する。
【0052】
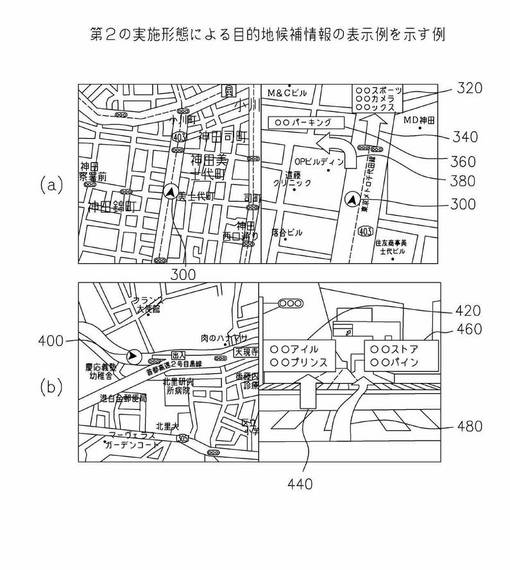
ここで、自車位置に対応する道路リンクよりも1つ先の道路リンクにおいて分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合に画像表示装置15に表示される目的地候補情報の例について図6を参照しながら説明する。図6(a)に示す画面左側には、車両が例えば神田美土代町付近を走行しているときの地図画像が表示されている。この地図画像には、現在の自車位置を示す車両位置マーク300が含まれている。
【0053】
一方、図6(a)に示す画面右側には、目的地履歴検索が行われたときに、現在の自車位置付近の拡大地図画像が表示される。この拡大地図画像には、現在の自車位置を示す車両位置マーク300の他に、自車位置に対応する道路リンクから自車進行方向側に位置する1つ先の道路リンクを含む走行軌跡の目的地に関する目的地候補情報320,360と、目的地候補情報320,360により示される目的地へそれぞれ向かうための進行方向を示す矢印340,380とが含まれている。
【0054】
図6(a)の画面表示を見たユーザは、1つ先の道路リンクの端部に当たる交差点をそのまま直進する方向に、過去に設定したことのある目的地として「○○スポーツ」、「○○カメラ」、「○○ックス」が存在することを把握することができる。また、当該交差点を左折する方向に、過去に設定したことのある目的地として「○○パーキング」が存在することを把握することができる。
【0055】
図6(b)に示す画面左側には、車両が例えば首都高速入口付近を走行しているときの地図画像が表示されている。この地図画像には、現在の自車位置を示す車両位置マーク400が含まれている。一方、図6(b)に示す画面右側には、目的地履歴検索が行われたときに、現在の自車位置付近の拡大地図画像として高速入口案内図画像が表示される。この高速入口案内図画像には、自車位置に対応する道路リンクから自車進行方向側に位置する1つ先の道路リンクを含む走行軌跡の目的地に関する目的地候補情報420,460と、目的地候補情報420,460により示される目的地へそれぞれ向かうための進行方向を示す矢印440,480とが含まれている。
【0056】
図6(b)の画面表示を見たユーザは、1つ先の道路リンクの端部に当たる分岐点をそのまま直進する方向に、過去に設定したことのある目的地として「○○アイル」、「○○プリンス」が存在することを把握することができる。また、当該分岐点を右斜め方向に進路変更する(つまり、高速道路の入口に向かう)方向に、過去に設定したことのある目的地として「○○ストア」、「○○パイン」が存在することを把握することができる。
【0057】
なお、本実施形態において、自車位置に対応する道路リンクではなく、その1つ先の道路リンクから分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定しているのは、現在位置から少し先の交差点や分岐点付近に目的地候補情報を表示するためである。このようにすれば、現在位置からその交差点や分岐点に至るまでの間に、どの方向に所望の目的地が存在するかをユーザが余裕をもって把握することができる。ここでは1つの先の道路リンクを例に挙げたが、2つ以上先の道路リンクとしてもよい。また、車両の停車中に目的地履歴検索を行うことを想定すれば、1つ先の道路リンクの代わりに自車位置に対応する道路リンクとしてもよい。
【0058】
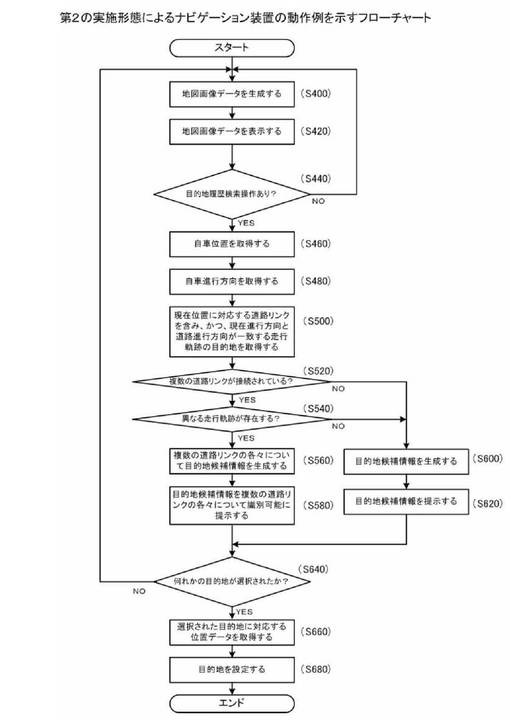
次に、第2の実施形態におけるナビゲーション装置の動作について説明する。図7は、第2の実施形態によるナビゲーション装置の動作例を示すフローチャートである。図7におけるステップS400の処理は、ナビゲーション装置が起動することによって開始する。
【0059】
まず、地図描画部30は、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する(ステップS400)。地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納される。次に、読出制御部32は、VRAM31から1画面分の地図画像データを読み出して画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データを画像表示装置15に出力する(ステップS420)。
【0060】
次に、自車位置取得部33a、自車進行方向取得部33bおよび目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたか否かについて判定する(ステップS440)。もし、目的地履歴検索操作を受けていないと判定した場合(ステップS440にてNO)、処理はステップS400に遷移する。
【0061】
一方、目的地履歴検索操作を受けたと判定した場合(ステップS440にてYES)、自車位置取得部33aは、マップマッチング制御部26から出力された自車位置情報を入力し、目的地取得部33cに出力する(ステップS460)。また、自車進行方向取得部33bは、マップマッチング制御部26から出力された自車進行方向情報を入力し、目的地取得部33cに出力する(ステップS480)。
【0062】
そして、目的地取得部33cは、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する(ステップS500)。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0063】
次に、目的地候補情報生成部33e′は、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンクに対して複数の道路リンクが接続されているか否か(すなわち、1つ先の道路リンクから複数の道路リンクが分岐しているか否か)について判定する(ステップS520)。
【0064】
もし、複数の道路リンクが分岐していると目的地候補情報生成部33e′にて判定した場合(ステップS520にてYES)、目的地候補情報生成部33e′は、走行履歴情報記憶部27に記憶されている走行軌跡情報に基づいて、分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定する(ステップS540)。ここで、異なる走行軌跡が存在すると目的地候補情報生成部33e′にて判定した場合(ステップS540にてYES)、目的地候補情報生成部33e′は、当該異なる走行軌跡情報に対応する道路リンクの各々について、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する(ステップS560)。
【0065】
そして、目的地候補情報生成部33e′は、異なる走行軌跡情報に対応する道路リンクの各々について生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS580)。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、複数の道路リンクの分岐地点付近に、異なる走行軌跡情報に対応する道路リンクの各々について識別可能に表示する。
【0066】
一方、1つ先の道路リンクから複数の道路リンクが分岐していないと目的地候補情報生成部33e′にて判定した場合(ステップS520にてNO)、および、複数の道路リンクが分岐している場合でも異なる走行軌跡が存在しないと目的地候補情報生成部33e′にて判定した場合(ステップS540にてNO)、目的地候補情報生成部33e′は、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する1つの目的地候補情報を生成する(ステップS600)。
【0067】
そして、目的地候補情報生成部33e′は、生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM30から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS620)。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンク付近に表示する。
【0068】
次に、誘導経路制御部28は、画像表示装置15に目的地候補情報が表示されてから所定時間の間に、当該目的地候補情報により示される目的地の何れかを選択する操作を外部信号入力部23を介して受けたか否かについて判定する(ステップS640)。もし、何れかの目的地を選択する操作を受けていないと誘導経路制御部28にて判定した場合(ステップS640にてNO)、処理はステップS400に遷移する。
【0069】
一方、何れかの目的地を選択する操作を受けたと誘導経路制御部28にて判定した場合(ステップS640にてYES)、誘導経路制御部28は、選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得する(ステップS660)。最後に、誘導経路制御部28は、走行軌跡情報記憶部27より取得した位置データを目的地データとして誘導経路メモリ29に格納する(ステップS680)。ステップS680の処理が完了することによって、ナビゲーション装置は、図7における処理を終了する。
【0070】
以上詳しく説明したように、第2の実施形態では、自車位置よりも自車進行方向側の位置において分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合、目的地取得部33cにより取得された目的地に関する目的地候補情報を、当該異なる走行軌跡情報に対応する道路リンクの各々について識別可能に提示するようにしている。
【0071】
このように構成した第2の実施形態によれば、走行途中で所望の目的地を過去に設定した目的地履歴から選択して設定する場合に、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませて提示できることに加えて、以下のようなメリットも有する。すなわち、ユーザは、分岐先のそれぞれの方向に存在する走行軌跡の目的地を各々の方向毎に識別して容易に把握することができる。このため、提示された目的地候補の中から所望の目的地を選択する際に、これから進むべき方向を把握した上で選択することができる。
【0072】
なお、上記第1および第2の実施形態では、目的地履歴検索操作が操作部12により行われた場合に目的地候補情報を提示する例について説明したが、本発明はこれに限定されない。例えば、目的地履歴検索操作の有無に関係なく、車両が交差点や分岐点の所定距離以内に近づく毎に、目的地候補を走行軌跡情報記憶部27から取得し、目的地候補情報を提示するようにしても良い。ただし、この場合は目的地候補情報がほとんど常時表示され続ける。そのため、地図画像に重畳して目的地候補情報を表示すると、ユーザが地図画像を見るにあたり、目的地候補情報の表示が邪魔になるかもしれない。
【0073】
このような不都合を解消するために、表示画面を2分割し、一方の画面において地図画像のみを表示し、他方の画面において地図画像に重畳して目的地候補情報を表示するようにしてもよい。または、所定間隔(一定の時間間隔または距離間隔)毎に、あるいは、複数(たとえば5つ)の交差点を通過するタイミング毎に、目的地候補を取得し、目的地候補情報を提示するようにしてもよい。また、交差点や分岐点を車両が通過する毎に走行軌跡情報記憶部27から目的地候補を取得し、今回取得した目的地候補の数が前回取得した目的地候補の数よりも減少したタイミングで、今回取得した目的地に関する目的地候補情報を提示するのも好適である。
【0074】
その他、上記第1および第2の実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0075】
【図1】第1の実施形態によるナビゲーション装置の全体構成例を示すブロック図である。
【図2】第1の実施形態による目的地候補抽出部の機能構成例を示す機能ブロック図である。
【図3】第1の実施形態による目的地候補情報の表示例を示す図である。
【図4】第1の実施形態によるナビゲーション装置の動作例を示すフローチャートである。
【図5】第2の実施形態による目的地候補抽出部の機能構成例を示す機能ブロック図である。
【図6】第2の実施形態による目的地候補情報の表示例を示す図である。
【図7】第2の実施形態によるナビゲーション装置の動作例を示すフローチャートである。
【符号の説明】
【0076】
33 目的地候補抽出部
33a 自車位置取得部
33b 自車進行方向取得部
33c 目的地取得部
33e,33e′ 目的地候補情報生成部
37 画像合成部
【技術分野】
【0001】
本発明は、経路誘導機能を備えたナビゲーション装置および目的地候補情報提示方法に関する。
【背景技術】
【0002】
一般に、車両の走行案内を行うナビゲーション装置は、単に現在地周辺の地図を表示するのみでなく、目的地を指定することにより、現在地から目的地までの誘導経路を自動設定して案内する機能を備えている。この経路誘導機能では、地図データを用いて現在地から目的地までを結ぶ最もコストが小さな経路を、幅優先探索(BFS)法あるいはダイクストラ法などのシミュレーションを行って自動探索し、その探索した経路を誘導経路として設定する。
【0003】
誘導経路の設定後は、車両の走行中に地図画像上で誘導経路を他の道路と識別可能なように色を変えて太く描画する。また、車両が誘導経路上の案内交差点から所定距離内に近づいたときに、交差点案内図(交差点拡大図とこの交差点での進行方向を示す矢印)を表示したり、進行方向を音声で案内したりするなどの交差点案内を行うことにより、運転者を目的地まで案内するようになっている。
【0004】
この種の車載用ナビゲーション装置では、通常、いくつかの目的地設定方法が用意されている。例えば、住所入力、50音入力、電話番号入力、郵便番号入力などにより、特定の地点を検索するようにしたものが知られている。さらに、過去に目的地として設定した地点で構成される目的地履歴リストから所望の地点を選択することにより、目的地を設定する方法も知られている。
【0005】
ところで、ユーザは、過去に誘導経路を設定して行ったことのある地点に再度行く場合には、過去の記憶を頼りにして(すなわち、経路誘導機能を今回は利用せずに)当該地点に向かって車両を走行させることがある。この場合、目的地まで無事に辿り着ければ良いが、途中で目的地へ行くための経路がわからなくなってしまうことがある。道に迷ったユーザは、その時点で誘導経路を設定しようとする。このときユーザは、住所入力や50音入力、電話番号入力などの方法によって目的地を設定することも可能であるが、目的地履歴リストから選択することも可能である。
【0006】
ところが、目的地履歴リストから所望の地点を選択することによる設定方法では、過去に目的地として設定した全ての地点がリスト表示される。このため、現時点で目的地として設定する可能性のない地点もリスト表示されてしまい、ユーザにとって必要以上の地点を含んだリストが表示される可能性があるという問題があった。
【0007】
この問題に対して、過去に目的地の設定操作を行った操作地点のうち自車両の現在位置から所定の範囲内に存在する地点を抽出し、当該抽出した操作地点において過去に目的地として設定した地点のみを目的地候補として抽出する技術が提案されている(例えば、特許文献1を参照)。この特許文献1に記載の技術によれば、目的地設定履歴に登録されている目的地の中から自車両の現在位置を考慮した地点の抽出が可能となり、ユーザが必要とする可能性の高い地点のみを目的地候補として表示することができる。
【特許文献1】特開2006−23149号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載の技術では、過去に目的地として設定された地点のうち実際にリスト表示される地点は、過去に目的地の設定操作を行ったことのある操作地点のうち、自車両の現在位置から所定の範囲内に存在する地点のみに限られる。ここで目的地候補の抽出キーとして用いている操作地点情報は、単にその操作地点において目的地の設定操作を行ったことがある事実を示すにすぎない情報である。そのため、当該操作地点情報を用いて目的地候補を抽出しても、ユーザが本当に目的地として設定するのに必要な地点が抽出されない可能性があるという問題があった。
【0009】
本発明は、このような問題を解決するために成されたものであり、過去に設定した目的地履歴から所望の目的地を選択して設定する場合に、選択対象として提示する目的地候補の数を絞ってユーザの選択を容易にするとともに、その絞った目的地候補の中に、ユーザが目的地として設定する可能性の高い地点をより高い確度で含ませることができるようにすることを目的とする。
【課題を解決するための手段】
【0010】
上記した課題を解決するために、本発明では、目的地と、目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を走行軌跡情報記憶部に記憶しておく。そして、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部から取得し、当該取得した目的地を目的地候補情報として提示するようにしている。
【発明の効果】
【0011】
上記のように構成した本発明によれば、過去に設定された目的地の履歴の中から、現在の自車位置に対応する道路リンクを現在の自車進行方向に走行して到達した目的地のみが目的地候補として抽出される。このため、過去に設定した目的地履歴から所望の目的地を選択して設定する場合に、選択対象として提示する目的地候補の数を絞ってユーザの選択を容易にすることができる。また、過去の記憶を頼りに目的地に向かって走行している途中でその先の道が分からなくなってしまった場合に、現在走行している道路を走行履歴とする過去の設定目的地が目的地候補として提示されるので、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませることができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の第1の実施形態を図面に基づいて説明する。図1は、第1の実施形態によるナビゲーション装置の全体構成例を示すブロック図である。図1において、100はナビゲーション制御装置であり、ナビゲーション装置の全体を制御する。11はDVD−ROM等の記録媒体であり、地図表示や経路探索等に必要な各種の地図データを記憶している。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM11を用いているが、CD−ROM、ハードディスク、半導体メモリ等の他の記録媒体を用いても良い。
【0013】
DVD−ROM11に記録された地図データには、地図表示や経路探索、マップマッチング等の各種処理に使用する道路ユニットのデータが含まれている。道路ユニットのデータは、道路や車線等に対応する道路リンクに関する情報と、当該道路リンクの両端に当たるノードに関する情報とを含んでいる。
【0014】
12はリモコン、タッチパネルまたは操作スイッチ等の操作部であり、ユーザがナビゲーション制御装置100に対して各種の情報(例えば、経路誘導の目的地や経由地)を設定したり、各種の操作(例えば、メニュー選択操作、地図の拡大/縮小操作、手動地図スクロール、数値入力など)を行ったりするためのものである。過去に設定した目的地の履歴から所望の目的地を検索する操作(以下、目的地履歴検索操作という)等も、この操作部12により行うことができる。
【0015】
13は車両の現在位置を測定するための自立航法センサであり、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する距離センサ(車速センサ)13aと、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)13bとを含んでいる。自立航法センサ13は、これらの距離センサ13aおよび角速度センサ13bによって車両の相対位置および方位を検出し、その情報をナビゲーション制御装置100に出力する。
【0016】
14は車両の現在位置を測定するためのGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ(図示せず)で受信し、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、GPS受信機14は、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にナビゲーション制御装置100に出力する。
【0017】
15は画像表示装置であり、ナビゲーション制御装置100の制御によって生成された画像を表示する。この画像表示装置15の画面上には、自車位置を含む範囲の地図画像が車両位置マークや各種ランドマーク等と共に表示される。また、この地図画像上には、誘導経路が表示されるとともに、車両の位置が誘導経路上の案内交差点近傍に近づいたときに交差点拡大図が表示される。また、目的地履歴検索操作が操作部12により行われた場合には、後述する目的地候補抽出部33の処理によって抽出された目的地が目的地候補情報として画像表示装置15の画面上に表示される。
【0018】
次いで、ナビゲーション制御装置100の内部構成において、21は地図バッファであり、DVD−ROM11から読み出された地図データを一時的に格納する。22はROM読出制御部であり、DVD−ROM11からの地図データの読み出しを制御する。このROM読出制御部22は、後述するマップマッチング制御部26からマップマッチング処理後の車両現在位置情報を入力する。そして、その車両現在位置を含む所定範囲の地図データの読み出し指示を出力する。これによりROM読出制御部22は、地図表示に必要な地図データをDVD−ROM11から読み出して、地図バッファ21に格納する。
【0019】
23は外部信号入力部であり、操作部12からその操作状態に応じた操作信号を入力する。24は車両位置・方位計算部であり、自立航法センサ13から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。25はデータ記憶部であり、GPS受信機14から出力される自車の絶対的な位置および方位のデータを順次格納する。
【0020】
上述のマップマッチング制御部26は、地図バッファ21に読み出されている地図データと、車両位置・方位計算部24により計算された自立航法センサ13に基づく推定車両位置および車両方位のデータと、データ記憶部25に格納されたGPS受信機14による自車位置および車両方位のデータとを用いて、車両走行距離毎に投影法等によるマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0021】
また、マップマッチング制御部26は、修正後における地図上の自車位置および自車進行方向をそれぞれ示す自車位置情報および自車進行方向情報を所定間隔(一定の時間間隔または距離間隔)で走行軌跡情報記憶部27に出力する。また、マップマッチング制御部26は、目的地履歴検索操作が操作部12により行われたときに、その時点での自車位置情報および自車進行方向情報を目的地候補抽出部33に出力する。
【0022】
走行軌跡情報記憶部27は、誘導経路が設定されている場合において、地図バッファ21に読み出されている地図データと、マップマッチング制御部26より所定間隔で出力される自車位置情報および自車進行方向情報とに基づいて、当該誘導経路の目的地と、自車位置情報により示される自車位置に対応する道路リンクと、自車進行方向情報により示される自車進行方向とを関連付けて走行軌跡情報を生成し、記憶するものである。すなわち、走行軌跡情報は、過去に設定された目的地と、その目的地に至る走行軌跡を構成する複数の道路リンクの各々と、当該目的地へ向かった際の各道路リンクでの道路進行方向(自車進行方向)とをそれぞれ関連付けた情報である。
【0023】
28は誘導経路制御部であり、地図バッファ21に格納された地図データを用いて、現在地から目的地までを結ぶ最もコストが小さな誘導経路を探索する。29は誘導経路メモリであり、誘導経路制御部28によって探索された誘導経路のデータ(現在地から目的地までのノードの集合)を記憶する。経路探索を行う際に、誘導経路制御部28は、マップマッチング制御部26から出力される現在位置情報を出発地データとして誘導経路メモリ29に設定するとともに、操作部12の操作によって設定された地点を目的地データとして誘導経路メモリ29に設定して、誘導経路の探索を行う。
【0024】
30は地図描画部であり、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する。31はVRAM(ビデオRAM)であり、地図描画部30により生成された地図画像データを一時的に格納する。32は読出制御部であり、VRAM31からの地図画像データの読み出しを制御する。すなわち、地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納され、読出制御部32によって1画面分の地図画像データが読み出される。
【0025】
33は目的地候補抽出部であり、目的地履歴検索操作が操作部12により行われた場合に、自車両の現在位置を含む走行軌跡のうち、当該現在位置に対応する道路リンクの道路進行方向(目的地へ向かった際の進行方向)と自車両の現在進行方向とが一致する走行軌跡の目的地を目的地候補として抽出する。そして、抽出した目的地候補を表す画像データ(目的地候補情報に相当)を生成して画像合成部37に出力する。なお、目的地候補抽出部33が行う処理の詳細については後述する。
【0026】
34は操作画面発生部であり、操作部12を用いて各種の操作を行う際に必要な操作画面を生成して画像合成部37に出力する。35は各種マーク発生部であり、マップマッチング処理された後の自車位置に表示する車両位置マークや、ガソリンスタンドやコンビニエンスストア等を表示する各種ランドマーク等を生成して画像合成部37に出力する。
【0027】
36は誘導経路描画部であり、誘導経路メモリ29に記憶された誘導経路データを使用して、誘導経路の描画データを発生する。すなわち、誘導経路描画部36は、誘導経路メモリ29に記憶された誘導経路データの中から、その時点でVRAM31に描画された地図エリアに含まれるものを選択的に読み出し、地図画像に重ねて他の道路と異なる濃い紫色で太く強調した誘導経路の描画データを生成する。
【0028】
画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補抽出部33、操作画面発生部34、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。これにより、合成された画像が画像表示装置15の画面上に表示される。
【0029】
次に、第1の実施形態による目的地候補抽出部33の機能構成について説明する。図2は、第1の実施形態による目的地候補抽出部33の機能構成例を示す機能ブロック図である。図2に示すように、目的地候補抽出部33は、その機能構成として、自車位置取得部33a、自車進行方向取得部33b、目的地取得部33c、目的地バッファ33dおよび目的地候補情報生成部33eを備えている。
【0030】
自車位置取得部33aは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたとき、マップマッチング制御部26から自車位置情報を入力し、目的地取得部33cに出力する。自車進行方向取得部33bは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたとき、マップマッチング制御部26から自車進行方向情報を入力し、目的地取得部33cに出力する。
【0031】
目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けた場合、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0032】
目的地候補情報生成部33eは、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する。そして、目的地候補情報生成部33eは、生成した目的地候補情報を画像合成部37に出力する。なお、目的地候補情報生成部33eおよび画像合成部37は、特許請求の範囲の目的地候補情報提示部に対応する。
【0033】
ここで、画像表示装置15に表示される目的地候補情報の例を、図3を参照しながら説明する。図3(a)は、車両が例えば神田駅付近を走行しているときの表示例で、現在の自車位置を示す車両位置マーク100が表示されている。図3(b)は、図3(a)の自車位置において目的地履歴検索操作が行われたときの表示例で、現在の自車位置を示す車両位置マーク100の他に、目的地候補情報120が車両位置マーク100の付近に表示されている。目的地候補情報120には、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地があらかじめ定められた順序(例えば、目的地の設定日時順や設定回数順、現在位置からの距離が近い順等)に従って表示されている。
【0034】
誘導経路制御部28は、画像表示装置15に表示されている目的地候補情報により示される目的地の中から何れかの目的地を選択する操作を表す操作信号を外部信号入力部23から受けたとき、当該選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得し、目的地データとして誘導経路メモリ29に格納する。
【0035】
次に、第1の実施形態におけるナビゲーション装置の動作について説明する。図4は、第1の実施形態によるナビゲーション装置の動作例を示すフローチャートである。図4におけるステップS100の処理は、ナビゲーション装置が起動することによって開始する。
【0036】
まず、地図描画部30は、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する(ステップS100)。地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納される。次に、読出制御部32は、VRAM31から1画面分の地図画像データを読み出して画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データを画像表示装置15に出力する(ステップS120)。
【0037】
次に、自車位置取得部33a、自車進行方向取得部33bおよび目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたか否かについて判定する(ステップS140)。もし、目的地履歴検索操作を受けていないと判定した場合(ステップS140にてNO)、処理はステップS100に遷移する。
【0038】
一方、目的地履歴検索操作を受けたと判定した場合(ステップS140にてYES)、自車位置取得部33aは、マップマッチング制御部26から自車位置情報を入力し、目的地取得部33cに出力する(ステップS160)。また、自車進行方向取得部33bは、マップマッチング制御部26から自車進行方向情報を入力し、目的地取得部33cに出力する(ステップS180)。
【0039】
そして、目的地取得部33cは、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する(ステップS200)。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0040】
次に、目的地候補情報生成部33eは、目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する(ステップS220)。そして、目的地候補情報生成部33eは、生成した目的地候補情報を画像合成部37に出力する。次に、画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS240)。
【0041】
次に、誘導経路制御部28は、画像表示装置15に目的地候補情報が表示されてから所定時間の間に、当該目的地候補情報により示される目的地の何れかを選択する操作を外部信号入力部23を介して受けたか否かについて判定する(ステップS260)。もし、何れかの目的地を選択する操作を受けていないと誘導経路制御部28にて判定した場合(ステップS260にてNO)、処理はステップS100に遷移する。
【0042】
一方、何れかの目的地を選択する操作を受けたと誘導経路制御部28にて判定した場合(ステップS260にてYES)、誘導経路制御部28は、選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得する(ステップS280)。最後に、誘導経路制御部28は、走行軌跡情報記憶部27より取得した位置データを目的地データとして誘導経路メモリ29に格納する(ステップS300)。ステップS300の処理が完了することによって、ナビゲーション装置は、図4における処理を終了する。
【0043】
以上詳しく説明したように、第1の実施形態では、目的地履歴検索操作が操作部12により行われた場合に、自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向とが一致する走行軌跡の目的地を目的地候補として走行軌跡情報記憶部27から取得し、当該取得した目的地に関する目的地候補情報を画像表示装置15に提示するようにしている。
【0044】
このように構成した第1の実施形態によれば、過去の記憶を頼りに目的地に向かっている走行途中でその先の道が分からなくなってしまった場合に、目的地履歴検索を行うと、過去に設定された目的地の履歴の中から、現在位置に対応する道路リンクを現在の自車進行方向に走行して到達した目的地のみが目的地候補として抽出される。このため、目的地候補の数を絞って画像表示装置15に提示することができ、ユーザの選択を容易にすることができる。しかも、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませることができるようになる。
【0045】
次に、本発明の第2の実施形態を図面に基づいて説明する。第2の実施形態によるナビゲーション装置は、図1の目的地候補抽出部33に代えて目的地候補抽出部33′を備えて構成される。図5は、第2の実施形態による目的地候補抽出部33′の機能構成例を示す機能ブロック図である。なお、この図5において、図2に示した符号と同一の符号を付したものは同一の機能を有するものであるので、ここでは重複する説明を省略する。第2の実施形態において、目的地候補抽出部33′は、図2の目的地候補情報生成部33eに代えて目的地候補情報生成部33e′を備えて構成される。
【0046】
上述した第1の実施形態において、目的地候補情報生成部33eは、図3(b)に示すように、車両位置マーク100の付近に表示させる目的地候補情報120を生成していた。これに対して、第2の実施形態による目的地候補情報生成部33e′は、図6に示すように、現在位置よりも自車進行方向側の先にある交差点や分岐点の付近に表示させる目的地候補情報を生成する。
【0047】
具体的には、目的地候補情報生成部33e′は、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンクに対して複数の道路リンクが接続されているか否か、すなわち、1つ先の道路リンクから複数の道路リンクが分岐しているか否かについて判定する。
【0048】
もし、複数の道路リンクが分岐していると目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、走行履歴情報記憶部27に記憶されている走行軌跡情報に基づいて、分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定する。ここで、異なる走行軌跡が存在すると目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、当該異なる走行軌跡に対応する道路リンクの各々について、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する。
【0049】
そして、目的地候補情報生成部33e′は、異なる走行軌跡に対応する道路リンクの各々について生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、複数の道路リンクの分岐地点付近に、異なる走行軌跡に対応する道路リンクの各々について識別可能に表示する。
【0050】
一方、1つ先の道路リンクから複数の道路リンクが分岐していないと目的地候補情報生成部33e′にて判定した場合、および、複数の道路リンクが分岐している場合でも異なる走行軌跡が存在しないと目的地候補情報生成部33e′にて判定した場合、目的地候補情報生成部33e′は、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する1つの目的地候補情報を生成する。
【0051】
そして、目的地候補情報生成部33e′は、生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM30から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンク付近に表示する。
【0052】
ここで、自車位置に対応する道路リンクよりも1つ先の道路リンクにおいて分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合に画像表示装置15に表示される目的地候補情報の例について図6を参照しながら説明する。図6(a)に示す画面左側には、車両が例えば神田美土代町付近を走行しているときの地図画像が表示されている。この地図画像には、現在の自車位置を示す車両位置マーク300が含まれている。
【0053】
一方、図6(a)に示す画面右側には、目的地履歴検索が行われたときに、現在の自車位置付近の拡大地図画像が表示される。この拡大地図画像には、現在の自車位置を示す車両位置マーク300の他に、自車位置に対応する道路リンクから自車進行方向側に位置する1つ先の道路リンクを含む走行軌跡の目的地に関する目的地候補情報320,360と、目的地候補情報320,360により示される目的地へそれぞれ向かうための進行方向を示す矢印340,380とが含まれている。
【0054】
図6(a)の画面表示を見たユーザは、1つ先の道路リンクの端部に当たる交差点をそのまま直進する方向に、過去に設定したことのある目的地として「○○スポーツ」、「○○カメラ」、「○○ックス」が存在することを把握することができる。また、当該交差点を左折する方向に、過去に設定したことのある目的地として「○○パーキング」が存在することを把握することができる。
【0055】
図6(b)に示す画面左側には、車両が例えば首都高速入口付近を走行しているときの地図画像が表示されている。この地図画像には、現在の自車位置を示す車両位置マーク400が含まれている。一方、図6(b)に示す画面右側には、目的地履歴検索が行われたときに、現在の自車位置付近の拡大地図画像として高速入口案内図画像が表示される。この高速入口案内図画像には、自車位置に対応する道路リンクから自車進行方向側に位置する1つ先の道路リンクを含む走行軌跡の目的地に関する目的地候補情報420,460と、目的地候補情報420,460により示される目的地へそれぞれ向かうための進行方向を示す矢印440,480とが含まれている。
【0056】
図6(b)の画面表示を見たユーザは、1つ先の道路リンクの端部に当たる分岐点をそのまま直進する方向に、過去に設定したことのある目的地として「○○アイル」、「○○プリンス」が存在することを把握することができる。また、当該分岐点を右斜め方向に進路変更する(つまり、高速道路の入口に向かう)方向に、過去に設定したことのある目的地として「○○ストア」、「○○パイン」が存在することを把握することができる。
【0057】
なお、本実施形態において、自車位置に対応する道路リンクではなく、その1つ先の道路リンクから分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定しているのは、現在位置から少し先の交差点や分岐点付近に目的地候補情報を表示するためである。このようにすれば、現在位置からその交差点や分岐点に至るまでの間に、どの方向に所望の目的地が存在するかをユーザが余裕をもって把握することができる。ここでは1つの先の道路リンクを例に挙げたが、2つ以上先の道路リンクとしてもよい。また、車両の停車中に目的地履歴検索を行うことを想定すれば、1つ先の道路リンクの代わりに自車位置に対応する道路リンクとしてもよい。
【0058】
次に、第2の実施形態におけるナビゲーション装置の動作について説明する。図7は、第2の実施形態によるナビゲーション装置の動作例を示すフローチャートである。図7におけるステップS400の処理は、ナビゲーション装置が起動することによって開始する。
【0059】
まず、地図描画部30は、地図バッファ21に格納された地図データに基づいて、画像表示装置15への地図表示に必要な地図画像データを生成する(ステップS400)。地図描画部30によって生成された地図画像データは、VRAM31に一時的に格納される。次に、読出制御部32は、VRAM31から1画面分の地図画像データを読み出して画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データを画像表示装置15に出力する(ステップS420)。
【0060】
次に、自車位置取得部33a、自車進行方向取得部33bおよび目的地取得部33cは、目的地履歴検索操作を表す操作信号を外部信号入力部23から受けたか否かについて判定する(ステップS440)。もし、目的地履歴検索操作を受けていないと判定した場合(ステップS440にてNO)、処理はステップS400に遷移する。
【0061】
一方、目的地履歴検索操作を受けたと判定した場合(ステップS440にてYES)、自車位置取得部33aは、マップマッチング制御部26から出力された自車位置情報を入力し、目的地取得部33cに出力する(ステップS460)。また、自車進行方向取得部33bは、マップマッチング制御部26から出力された自車進行方向情報を入力し、目的地取得部33cに出力する(ステップS480)。
【0062】
そして、目的地取得部33cは、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置情報により示される自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と自車進行方向情報により示される自車進行方向とが一致する走行軌跡の目的地を走行軌跡情報記憶部27から取得する(ステップS500)。そして、目的地取得部33cは、走行軌跡情報記憶部27から取得した目的地を目的地候補として目的地バッファ33dに格納する。
【0063】
次に、目的地候補情報生成部33e′は、地図バッファ21からの地図データと、自車位置取得部33aからの自車位置情報と、自車進行方向取得部33bからの自車進行方向情報とに基づいて、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンクに対して複数の道路リンクが接続されているか否か(すなわち、1つ先の道路リンクから複数の道路リンクが分岐しているか否か)について判定する(ステップS520)。
【0064】
もし、複数の道路リンクが分岐していると目的地候補情報生成部33e′にて判定した場合(ステップS520にてYES)、目的地候補情報生成部33e′は、走行履歴情報記憶部27に記憶されている走行軌跡情報に基づいて、分岐している複数の道路リンクに対して異なる走行軌跡が存在するか否かを判定する(ステップS540)。ここで、異なる走行軌跡が存在すると目的地候補情報生成部33e′にて判定した場合(ステップS540にてYES)、目的地候補情報生成部33e′は、当該異なる走行軌跡情報に対応する道路リンクの各々について、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する目的地候補情報を生成する(ステップS560)。
【0065】
そして、目的地候補情報生成部33e′は、異なる走行軌跡情報に対応する道路リンクの各々について生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM31から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS580)。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、複数の道路リンクの分岐地点付近に、異なる走行軌跡情報に対応する道路リンクの各々について識別可能に表示する。
【0066】
一方、1つ先の道路リンクから複数の道路リンクが分岐していないと目的地候補情報生成部33e′にて判定した場合(ステップS520にてNO)、および、複数の道路リンクが分岐している場合でも異なる走行軌跡が存在しないと目的地候補情報生成部33e′にて判定した場合(ステップS540にてNO)、目的地候補情報生成部33e′は、目的地取得部33cにより目的地バッファ33dに格納された目的地に関する1つの目的地候補情報を生成する(ステップS600)。
【0067】
そして、目的地候補情報生成部33e′は、生成した目的地候補情報を画像合成部37に出力する。画像合成部37は、読出制御部32によってVRAM30から読み出された地図画像データに、目的地候補情報生成部33e′、各種マーク発生部35および誘導経路描画部36のそれぞれから出力される各画像データを重ねて画像合成を行い、画像表示装置15に出力する(ステップS620)。このとき画像合成部37は、目的地候補情報生成部33e′から出力された目的地候補情報を、自車位置に対応する道路リンクの自車進行方向側に接続された1つ先の道路リンク付近に表示する。
【0068】
次に、誘導経路制御部28は、画像表示装置15に目的地候補情報が表示されてから所定時間の間に、当該目的地候補情報により示される目的地の何れかを選択する操作を外部信号入力部23を介して受けたか否かについて判定する(ステップS640)。もし、何れかの目的地を選択する操作を受けていないと誘導経路制御部28にて判定した場合(ステップS640にてNO)、処理はステップS400に遷移する。
【0069】
一方、何れかの目的地を選択する操作を受けたと誘導経路制御部28にて判定した場合(ステップS640にてYES)、誘導経路制御部28は、選択された目的地に対応する位置データを走行軌跡情報記憶部27より取得する(ステップS660)。最後に、誘導経路制御部28は、走行軌跡情報記憶部27より取得した位置データを目的地データとして誘導経路メモリ29に格納する(ステップS680)。ステップS680の処理が完了することによって、ナビゲーション装置は、図7における処理を終了する。
【0070】
以上詳しく説明したように、第2の実施形態では、自車位置よりも自車進行方向側の位置において分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合、目的地取得部33cにより取得された目的地に関する目的地候補情報を、当該異なる走行軌跡情報に対応する道路リンクの各々について識別可能に提示するようにしている。
【0071】
このように構成した第2の実施形態によれば、走行途中で所望の目的地を過去に設定した目的地履歴から選択して設定する場合に、ユーザが目的地として設定する可能性の高い地点をより高い確度で目的地候補に含ませて提示できることに加えて、以下のようなメリットも有する。すなわち、ユーザは、分岐先のそれぞれの方向に存在する走行軌跡の目的地を各々の方向毎に識別して容易に把握することができる。このため、提示された目的地候補の中から所望の目的地を選択する際に、これから進むべき方向を把握した上で選択することができる。
【0072】
なお、上記第1および第2の実施形態では、目的地履歴検索操作が操作部12により行われた場合に目的地候補情報を提示する例について説明したが、本発明はこれに限定されない。例えば、目的地履歴検索操作の有無に関係なく、車両が交差点や分岐点の所定距離以内に近づく毎に、目的地候補を走行軌跡情報記憶部27から取得し、目的地候補情報を提示するようにしても良い。ただし、この場合は目的地候補情報がほとんど常時表示され続ける。そのため、地図画像に重畳して目的地候補情報を表示すると、ユーザが地図画像を見るにあたり、目的地候補情報の表示が邪魔になるかもしれない。
【0073】
このような不都合を解消するために、表示画面を2分割し、一方の画面において地図画像のみを表示し、他方の画面において地図画像に重畳して目的地候補情報を表示するようにしてもよい。または、所定間隔(一定の時間間隔または距離間隔)毎に、あるいは、複数(たとえば5つ)の交差点を通過するタイミング毎に、目的地候補を取得し、目的地候補情報を提示するようにしてもよい。また、交差点や分岐点を車両が通過する毎に走行軌跡情報記憶部27から目的地候補を取得し、今回取得した目的地候補の数が前回取得した目的地候補の数よりも減少したタイミングで、今回取得した目的地に関する目的地候補情報を提示するのも好適である。
【0074】
その他、上記第1および第2の実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0075】
【図1】第1の実施形態によるナビゲーション装置の全体構成例を示すブロック図である。
【図2】第1の実施形態による目的地候補抽出部の機能構成例を示す機能ブロック図である。
【図3】第1の実施形態による目的地候補情報の表示例を示す図である。
【図4】第1の実施形態によるナビゲーション装置の動作例を示すフローチャートである。
【図5】第2の実施形態による目的地候補抽出部の機能構成例を示す機能ブロック図である。
【図6】第2の実施形態による目的地候補情報の表示例を示す図である。
【図7】第2の実施形態によるナビゲーション装置の動作例を示すフローチャートである。
【符号の説明】
【0076】
33 目的地候補抽出部
33a 自車位置取得部
33b 自車進行方向取得部
33c 目的地取得部
33e,33e′ 目的地候補情報生成部
37 画像合成部
【特許請求の範囲】
【請求項1】
現在の自車位置を取得する自車位置取得部と、
現在の自車進行方向を取得する自車進行方向取得部と、
目的地と前記目的地に至る走行軌跡を構成する複数の道路リンクの各々と前記目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を記憶する走行軌跡情報記憶部と、
前記自車位置取得部により取得された前記自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と前記自車進行方向取得部により取得された前記自車進行方向とが一致する走行軌跡の目的地を前記走行軌跡情報記憶部から取得する目的地取得部と、
前記目的地取得部により取得された前記目的地を目的地候補情報として提示する目的地候補情報提示部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記目的地候補情報提示部は、前記自車位置よりも前記自車進行方向側の位置において分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合、当該異なる走行軌跡情報の目的地を前記目的地候補情報として、当該異なる走行軌跡情報に対応する道路リンクの各々について識別可能に提示することを特徴とするナビゲーション装置。
【請求項3】
現在の自車位置を取得する第1のステップと、
現在の自車進行方向を取得する第2のステップと、
目的地と前記目的地に至る走行軌跡を構成する複数の道路リンクの各々と前記目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を記憶する走行軌跡情報記憶部から、前記第1のステップにより取得された前記自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と前記第2のステップにより取得された前記自車進行方向とが一致する走行軌跡の目的地を取得する第3のステップと、
前記第3のステップにより取得された前記目的地を目的地候補情報として提示する第4のステップとを備えたことを特徴とする目的地候補情報提示方法。
【請求項1】
現在の自車位置を取得する自車位置取得部と、
現在の自車進行方向を取得する自車進行方向取得部と、
目的地と前記目的地に至る走行軌跡を構成する複数の道路リンクの各々と前記目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を記憶する走行軌跡情報記憶部と、
前記自車位置取得部により取得された前記自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と前記自車進行方向取得部により取得された前記自車進行方向とが一致する走行軌跡の目的地を前記走行軌跡情報記憶部から取得する目的地取得部と、
前記目的地取得部により取得された前記目的地を目的地候補情報として提示する目的地候補情報提示部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記目的地候補情報提示部は、前記自車位置よりも前記自車進行方向側の位置において分岐する複数の道路リンクに対して異なる走行軌跡情報が存在する場合、当該異なる走行軌跡情報の目的地を前記目的地候補情報として、当該異なる走行軌跡情報に対応する道路リンクの各々について識別可能に提示することを特徴とするナビゲーション装置。
【請求項3】
現在の自車位置を取得する第1のステップと、
現在の自車進行方向を取得する第2のステップと、
目的地と前記目的地に至る走行軌跡を構成する複数の道路リンクの各々と前記目的地へ向かった際の道路進行方向とをそれぞれ関連付けた走行軌跡情報を記憶する走行軌跡情報記憶部から、前記第1のステップにより取得された前記自車位置を含む走行軌跡のうち、当該自車位置に対応する道路リンクの道路進行方向と前記第2のステップにより取得された前記自車進行方向とが一致する走行軌跡の目的地を取得する第3のステップと、
前記第3のステップにより取得された前記目的地を目的地候補情報として提示する第4のステップとを備えたことを特徴とする目的地候補情報提示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−156573(P2010−156573A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2008−333906(P2008−333906)
【出願日】平成20年12月26日(2008.12.26)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成20年12月26日(2008.12.26)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]