
ナビゲーション装置および移動体位置修正方法
【課題】 駐車場内の通路に道路データをあらかじめ登録しておくことなく、駐車場内における移動体の正確な位置を推定することが可能な「ナビゲーション装置および移動体位置修正方法」を提供する。
【解決手段】 駐車場への車両の進入が検出されたときに、地図データメモリ11に格納されている駐車場の描画データに基づいて、駐車場内に仮想的な道路リンクを設定する仮想道路リンク設定部15cと、仮想道路リンクを利用してマップマッチングを行うマップマッチング処理部15dとを備え、車両が駐車場内に進入すると、その時点で駐車場内に仮想道路リンクが設定され、設定された仮想道路リンクに対してマップマッチングが行われるようにして、駐車場内の通路に道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、駐車場内における車両の正確な位置を推定できるようにする。
【解決手段】 駐車場への車両の進入が検出されたときに、地図データメモリ11に格納されている駐車場の描画データに基づいて、駐車場内に仮想的な道路リンクを設定する仮想道路リンク設定部15cと、仮想道路リンクを利用してマップマッチングを行うマップマッチング処理部15dとを備え、車両が駐車場内に進入すると、その時点で駐車場内に仮想道路リンクが設定され、設定された仮想道路リンクに対してマップマッチングが行われるようにして、駐車場内の通路に道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、駐車場内における車両の正確な位置を推定できるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置および移動体位置修正方法に関し、特に、いわゆるマップマッチングを行うことによって自立航法による自車位置の誤差を修正する方法に関するものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自立航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置において、車両の現在位置を測定することは不可欠である。このため、車両に搭載した距離センサおよび角度センサを用いて車両の相対位置を測定する測定法(自立航法)と、複数のGPS衛星から送られてくる電波を受信してn次元測位処理によって車両の絶対位置を測定する測定法(衛星航法)とが実用化されている。
【0004】
自立航法は、比較的低コストで車両位置を測定できるが、高精度に位置測定ができない問題があり、マップマッチング処理等の補正処理が必要になる。すなわち、自立航法では、車両が走行するにつれて誤差が累積し、車両位置が道路から外れてしまう。そこで、マップマッチング処理によって車両位置を道路データと照合し、必要に応じて車両位置を道路上に修正する。道路データは、交差点や分岐など複数の道路が交わる点を表すノードと、隣接するノード間を結ぶベクトルを表す道路リンクとから構成されている。車両位置を道路上に修正するというのは、具体的には車両位置を道路リンク上に引き付ける処理のことを言う。
【0005】
マップマッチングの方法は種々提案されている。例えば、車両の走行軌跡(所定走行距離毎の位置と方位)を保存しておき、地図上でその走行軌跡と同形の道路を求め、当該道路上のポイントに車両位置を修正する方法がある。具体的には、保存した走行軌跡の形状と道路リンクの形状とを比較して、当該道路リンクが走行軌跡と一定以上の類似度を持った形状であった場合に、車両位置をその道路リンクへ引き付ける処理を行う。この他に、投影法によるマップマッチングの方法も存在する。処理の詳細について割愛するが、この投影法も、所定の条件を満たした道路リンクに車両位置を引き付ける処理を行うものである。
【0006】
ところが、地図データベース中に道路リンクが存在しない領域、例えば駐車場や空き地などを走行する場合において、自車位置の近くに自車方位に近い方位を持つ道路リンクが存在すると、道路外の駐車場や空き地を走行中であるにもかかわらず、マップマッチングによって自車位置が道路上に修正されてしまうという問題があった。このような問題を解決するために、自車が駐車場内を走行中か否かを判定し、駐車場内を走行中のときは、自立航法により算出した自車位置をそのまま表示用の位置とすることにより、駐車場内での自車位置を示すことができるようにした技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2000−310542号公報
【0007】
また、高速道路の料金所エリアは通常の道路よりも幅が広く、車両がコースを変えて自由に走行可能であるが、地図データベース上では1本の細い線状の道路リンクしか設定されていない。そのため、車両がコースを大きく変えて走行した場合に、設定されている道路リンクから自車位置が外れてマップマッチング処理が行われ、そのときの自車位置の近くに存在する他の道路上に自車位置が修正されてしまうという問題もあった。このような問題を解決するために、所定以上の幅員または広さを持つエリアをあらかじめ面データ化して面状の道路リンクとすることにより、車両位置が面データ内にあればマッチング外れを起こさないようにした技術が提案されている(例えば、特許文献2参照)。
【特許文献2】特開2002−107163号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1,2に記載された技術では、駐車場や料金所エリア以外の他の道路に対して自車位置が修正されてしまうという不都合は回避できるものの、駐車場や料金所エリアの中の正確な自車位置を測定することはできない。駐車場内の通路や料金所エリア内の各料金所へのコースに関する道路リンクが存在しないので、自立航法によって蓄積された自車位置の誤差を修正することができないからである。特に、駐車場などでは、車両が比較的右折または左折やカーブを繰り返して走行するので、方位変化量が多くなって自車位置の誤差が蓄積され、正確な自車位置を測定することが困難となる。
【0009】
これに対して、屋内駐車場の範囲や、その駐車場内の構内道路(通路)、車両が駐車すべきスペースのデータを含んだ地図データをあらかじめ用意しておき、車両が屋内駐車場内で直線移動している状態であることが検出されたときに、算出した現在の進行方位を地図データの道路方位に応じて補正するようにした技術が提案されている(例えば、特許文献3参照)。
【特許文献2】特開2002−318122号公報
【0010】
しかし、これでは地図データのデータ量が膨大となり、大規模な記憶容量が必要となる。最近では大容量のハードディスクを搭載したナビゲーション装置も提供されているが、地図データの記録媒体としてDVD(Digital Versatile Disk)を用いたものが主流である。全国には非常に多くの駐車場が存在しており、それらの全てについて構内道路に道路データを持たせると、データ量がDVDの記憶容量を越えてしまう。そのため、構内道路に道路データを持たせることができるのは、一部の大規模駐車場や必要性の高い駐車場(アミューズメントパークなど)に限定せざるを得ず、それ以外の駐車場等では正確な自車位置を測定することができないという問題を生じる。
【0011】
また、車両の走行中や誘導経路の探索時などには、ハードディスクやDVDに記録されている全国の地図データの中から、自車位置の周辺の地図データをメモリに読み出して所定の処理が行われる。しかし、駐車場の構内道路や料金所エリアの走行コースに道路データを持たせることによって地図データのデータ量が肥大化していると、その読み出しに時間がかかり、処理に大きな負荷を与えてしまう。車両が通常の道路を走行中で駐車場内の道路データが必要でないときも、これを含んだ大量のデータがメモリに読み出されることになるので、その読み出し処理に余計な負荷がかかってしまうという問題を生じる。また、大容量のメモリが必要になるという問題もあった。
【0012】
さらに、全国には膨大な駐車場が存在し、新しい駐車場も日々作られている。したがって、これらの全てを調査して地図データを作成するには膨大な労力と時間を要し、現実的には極めて困難である。この観点からも、構内道路に道路データを持たせることができるのは、一部の大規模駐車場や必要性の高い駐車場に限定せざるを得ず、それ以外の駐車場等では正確な自車位置を測定することができないという問題を生じる。
【0013】
本発明は、このような問題を解決するために成されたものであり、駐車場内の構内道路や料金所エリアの走行コースなどに道路データをあらかじめ登録しておくことなく、駐車場内や料金所エリア内における移動体の正確な位置を推定することができるようにすることを目的とする。
【課題を解決するための手段】
【0014】
上記した課題を解決するために、本発明では、所定以上の幅員または広さを持つ施設エリアに移動体が進入したことが検出されたときに、施設エリアの内部に仮想的な道路リンクを設定し、当該仮想道路リンクを利用してマップマッチング処理を行うようにしている。
【0015】
本発明の他の態様では、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所において仮想道路リンクから現在位置が外れたとき、または、仮想道路リンクから外れた後の移動体の移動方向が格子の一辺と平行でないときに、仮想道路リンクから外れた後の移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すようにしている。
【発明の効果】
【0016】
上記のように構成した本発明によれば、移動体が駐車場や料金所エリアなどの施設エリア内に進入すると、その時点でリアルタイムに当該施設エリア内に仮想的な道路リンクが設定され、設定された仮想道路リンクに対してマップマッチングによる現在位置の引き付けが必要に応じて行われることとなる。したがって、駐車場内の構内道路や料金所エリアの走行コースなどに道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、施設エリア内における移動体の正確な位置を推定することができるようになる。
【0017】
本発明の他の特徴によれば、移動体の施設エリアへの進入に応じて仮想道路リンクが設定された後、移動体の移動状態に応じて仮想道路リンクが再設定されることとなる。これにより、最初に設定した仮想道路リンクと実際の構内道路や走行コースとの間にずれがあっても、仮想道路リンクを適宜再設定することによって実際の構内道路や走行コースに合わせてずれを無くしていくことができる。したがって、施設エリア内における移動体の位置をより正確に推定することができるようになる。
【発明を実施するための最良の形態】
【0018】
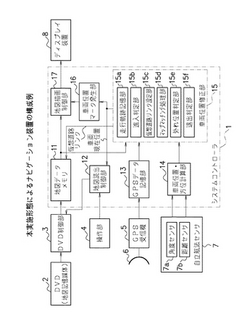
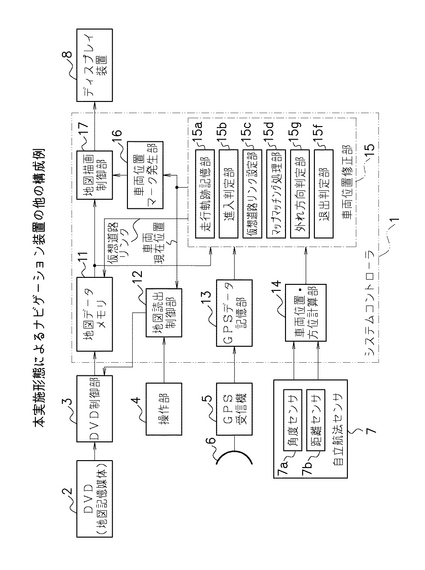
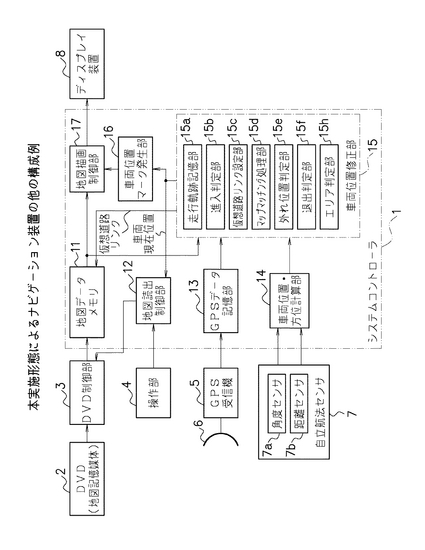
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の構成例を示す図である。図1において、1はシステムコントローラであり、ナビゲーション装置の全体を制御する。このシステムコントローラ1は、マイクロコンピュータ等により構成され、地図や車両位置マークの描画処理、位置修正処理などを行う。
【0019】
2はDVD−ROM(Digital Versatile Disk - Read Only Memory)などの地図記憶媒体であり、地図表示や経路探索などに必要な各種の地図データが記憶されている。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM2を用いているが、CD−ROM、ハードディスクなどの他の記憶媒体を用いても良い。3はDVD制御部であり、DVD−ROM2からの地図データの読み取りを制御する。
【0020】
DVD−ROM2に記憶されている地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路探索等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。描画ユニットには、建物や河川等を表示するために必要な背景レイヤのデータと、市町村名や道路名等を表示するために必要な文字レイヤのデータと、駐車場や有料道路の料金所エリアなどのように所定以上の幅員または広さを持つ施設エリアを表示するために必要な施設レイヤのデータとが含まれている。施設レイヤのデータは、施設エリアの位置データや施設エリアの外形情報を含む描画データ(ポリゴンデータ)を含んでいる。
【0021】
上述の道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含んでいる。すなわち、道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクテーブルとが含まれている。
【0022】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、属性フラグ、交通規制の数、交通規制レコード等の情報が含まれている。正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。属性フラグは、そのノードが交差点ノードであるか否かを示す交差点ノードフラグを含んでいる。交通規制の数は、そのノードに接続されているリンクに右折禁止やUターン禁止等の交通規制が存在する場合に、その交通規制の数を示す。交通規制レコードは、上述した交通規制が存在する場合にはその数に対応した交通規制の具体的な内容を示す。
【0023】
また、リンクテーブルには、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。リンクのコストは、そのリンクを走行する場合の所要時間を道路種別等から計算により求めて、そのリンクの通過に必要な時間を例えば分単位で示したものである。道路属性フラグは、そのリンクに関する各種の属性を示す。道路種別フラグは、そのリンクに対応した実際の道路が高速道路であるか一般道であるかといった種別を示す。このリンクテーブルには、道路に対応したリンクの情報が含まれているが、駐車場内の構内道路(通路)や料金所エリアの走行コースに対応したリンクの情報は含まれていない。
【0024】
4は操作部であり、例えばリモートコントローラ(リモコン)により構成される。この操作部4は、搭乗者がシステムコントローラ1に対して各種の情報(例えば、経路誘導の目的地や経由地)を設定したり、各種の操作(例えば、画面スクロールや地図検索、拡大/縮小、最適経路探索など)を行ったりするための各種操作子(ボタンやジョイスティック等)を備えており、操作子の操作状態に応じた赤外線信号がシステムコントローラ1に向けて送信される。なお、この操作部4は、後述するディスプレイ装置8の画面上に設けたタッチパネル等によって構成しても良い。
【0025】
5はGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ6で受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にシステムコントローラ1に出力する。
【0026】
7は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)7aと、所定走行距離毎に1個のパルスを出力する距離センサ7bとを備えている。自立航法センサ7は、これらの角度センサ7aおよび距離センサ7bによって車両の相対位置および方位を検出し、その情報をシステムコントローラ1に出力する。
【0027】
8はディスプレイ装置であり、システムコントローラ1から出力される画像データに基づいて、自車周辺の地図情報を車両位置マークや各種ランドマークと共に表示したり、この地図上に走行軌跡や誘導経路を表示したり、車両の位置が交差点近傍に近づいたときに交差点拡大図を表示したりする。
【0028】
次に、システムコントローラ1の詳細な構成について説明する。11は地図データメモリであり、DVD−ROM2から読み出された地図データを一時的に格納するためのものである。12は地図読出制御部であり、DVD−ROM2から地図データを読み出す際の制御を行う。地図読出制御部12は、車両位置修正部15から車両現在位置の情報を入力し、その車両現在位置を含む所定範囲の地図データをDVD−ROM2から読み出して地図データメモリ11に格納する。
【0029】
13はGPSデータ記憶部であり、GPS受信機5から出力される自車の絶対的な位置および方位のデータを順次格納する。14は車両位置・方位計算部であり、自立航法センサ7から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。
【0030】
15は車両位置修正部であり、走行軌跡記憶部15a、進入判定部15b、仮想道路リンク設定部15c、マップマッチング処理部15d、外れ位置判定部15eおよび退出判定部15fをその機能構成として備えている。走行軌跡記憶部15aは、GPSデータ記憶部13または車両位置・方位計算部14より出力されるデータに基づいて、所定時間毎あるいは所定走行距離毎の車両位置と車両方位の情報を走行軌跡として記憶する。
【0031】
進入判定部15bは、車両が駐車場等の施設エリアに進入したか否かを判定する。車両が駐車場に進入したか否かの判定は、様々な手法を用いて行うことが可能であり、本発明ではその手法は問わない。例えば、地図データメモリ11に格納されている地図データ(描画レイヤに含まれている施設エリアの位置データとポリゴンデータ)と、GPSデータ記憶部13または車両位置・方位計算部14から出力される自車の位置データとに基づいて、ポリゴンデータで示される区画内に自車位置が入ったか否かを検出することによって駐車場への進入を判定することが可能である。また、車両が路車間通信装置を搭載している場合には、駐車場の入口付近で路車間通信装置が駐車場の設備から信号を受信したか否かによって駐車場への進入を判定することも可能である。また、屋内駐車場の場合には、GPS受信機5にてGPS衛星からの電波を受信できなくなったか否か(GPSデータ記憶部13からのデータが無くなったか否か)によって駐車場への進入を判定することも可能である。
【0032】
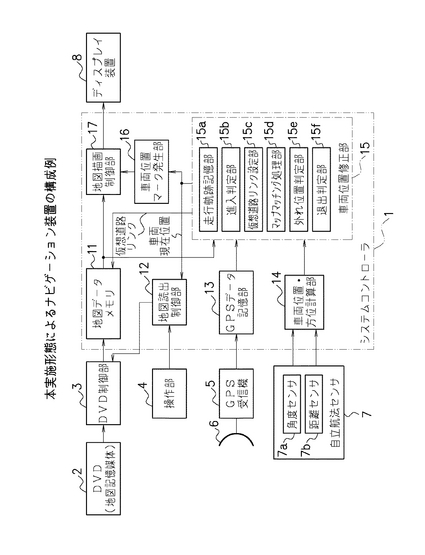
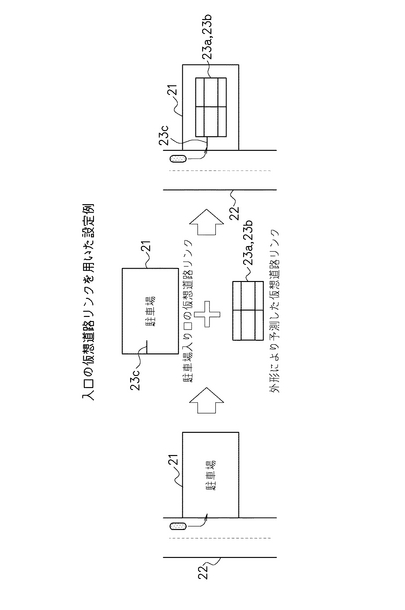
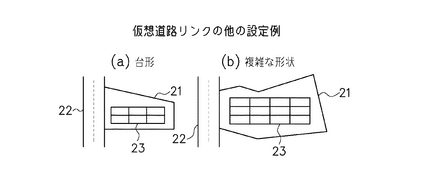
仮想道路リンク設定部15cは、進入判定部15bにより駐車場への進入が検出されたときに、地図データメモリ11に格納されている地図データを用いて、駐車場の内部に仮想的な道路リンクを設定する。このとき仮想道路リンク設定部15cは、例えば図2(a)〜(c)に示すように、駐車場21の外形(ポリゴンデータの形状)に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。格子状の仮想道路リンク23bは、例えば格子の一辺が、駐車場21に面した道路(その道路に対応する道路リンク)22に直交するように設定する。
【0033】
なお、2つ以上の仮想道路リンクが接する点および交わる点は、ノードとして設定する。以下では、このノードも含めて仮想道路リンクと呼ぶ(ノードを含めたものを広義の仮想道路リンク、ノードを含めないものを狭義の仮想道路リンクとし、特に区別しない限り広義の仮想道路リンクを言うものとする)。このようにして設定した仮想道路リンク23(外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23b)の情報は、例えば、地図データ中にあらかじめ含まれている道路のリンク情報やノード情報と同様の構成としても良いし、最低限必要な情報だけから構成しても良い。例えば、各ノードの位置情報、各ノードに接続するリンクの距離の情報から構成することが可能である。設定された仮想道路リンク23は、地図データメモリ11に格納される。
【0034】
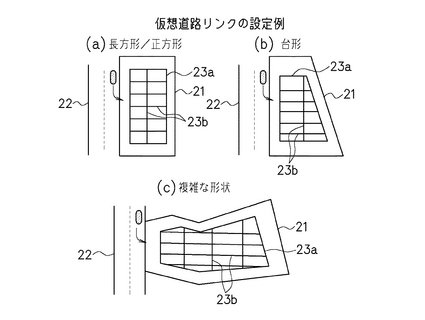
格子状の仮想道路リンク23bが有する格子の幅は、あらかじめ決められた間隔(例えば、駐車場法に従って定める)で割り当てられ、格子の本数は駐車場21の広さによって変化する。駐車場法によれば、車両一台分の駐車スペースは、幅2.3m以上、奥行き5m以上のサイズが基本である。また、駐車場内の通路幅は5.5m以上が基本であり、一方通行の場合は3.5m以上である。このような内容に従って、仮想道路リンク設定部15cが格子状の仮想道路リンク23bを設定するときは、縦横15.5m{=(駐車スペースの奥行き+通路幅の半分)×2=(5+2.75)×2}おきの格子を設定する。また、仮想道路リンク設定部15cが外枠の仮想道路リンク23aを設定するときは、駐車場21の外周部にも駐車スペースがあることを考慮して、外周から7.75m(=15.5÷2)だけ内側の位置に外枠の仮想道路リンク23aを設定する。
【0035】
図3は、駐車場法に従ってあらかじめ定めた間隔毎に長方形の駐車場21に対して仮想道路リンク23(外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23b)を設定する場合の例を示す図である。なお、図3において、24は駐車スペースを示している。
【0036】
図3に示すように、駐車場21の外形が縦50m×横100mの長方形である場合、駐車場21の外周から7.75mだけ内側の位置に外枠の仮想道路リンク23aを設定するとともに、その外枠の仮想道路リンク23aの中に、縦横15.5mおきに格子状の仮想道路リンク23bを設定する。格子状の仮想道路リンク23bを設定する際には、外枠の仮想道路リンク23aが持つ1つの角を基準点として、縦横15.5mの位置を順番に決めていく。このようにすると、図3の例では縦方向に2本、横方向に5本の仮想道路リンク23bが設定される。
【0037】
規準点は任意に決めてよいが、例えば駐車場21の入口に一番近い角とする。入口の位置は、ポリゴンデータの付属情報として入口の位置を示す情報が付いていれば、それを利用して判別することができる。また、進入判定部15bによって駐車場21への進入が検出されたときにGPSデータ記憶部13または車両位置・方位計算部14から出力される自車位置データや、走行軌跡記憶部15aに記憶されている走行履歴データに基づいて入口の位置を判別することも可能である。
【0038】
なお、ここでは仮想道路リンク23を構成する要素として外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bの2つを例に挙げたが、駐車場21の入口に仮想道路リンクを更に設定しても良い。図4は、入口の仮想道路リンク23cを設定する場合の例を示す図である。図4に示すように、進入判定部15bにより駐車場21への進入が検出されたら、仮想道路リンク設定部15cは、まず走行軌跡記憶部15aに格納された走行軌跡データを用いて、駐車場21に進入してから所定距離(例えば、7.75m)の走行軌跡に沿って駐車場21の入口部分に入口の仮想道路リンク23cを設定する。その後、駐車場21の外形を基準にして、図3に示した要領で外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bを設定する。
【0039】
入口の仮想道路リンク23cは必ずしも設定する必要はないが、退出判定部15fによって車両が駐車場21から退出したか否かの判定を行う際に、この入口の仮想道路リンク23cを利用すると判定がしやすくなる点で、入口の仮想道路リンク23cは設定するのが好ましい。
【0040】
マップマッチング処理部15dは、地図データメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置および車両方位のデータと、GPSデータ記憶部13に格納されたGPS受信機5による自車位置および車両方位のデータとを用いて、車両走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0041】
自立航法センサ7に基づく自車位置および車両方位のデータを用いたマップマッチングでは、例えば、走行軌跡記憶部15aに格納されている走行軌跡(所定走行距離毎の位置と方位)と同形の道路リンクを地図データ中から求め、当該道路リンク上のポイントに車両位置マークを引き付ける処理を行う。また、公知の投影法によるマップマッチングの方法を用いても良い。
【0042】
自立航法では、誤差が蓄積されて車両位置が道路リンクから大きく外れると、車両位置を実際の道路リンク上の現在位置にマップマッチングすることができない。すなわち、走行軌跡によるマップマッチング方法では走行軌跡と同形の道路を探すことができなくなり、投影法によるマップマッチング方法ではマッチングさせるための条件を満足する道路を探すことができなくなる。このように自立航法によるマップマッチングが不可能になったときには、GPS受信機5から得られる位置データと方位データとを用いて、自立航法センサ7による車両位置と走行方位とを修正する。
【0043】
進入判定部15bにより駐車場21への進入が検出された後も、基本的には、自立航法センサ7に基づく自車位置および車両方位のデータと、GPS受信機5に基づく自車位置および車両方位のデータとを用いてマップマッチング処理を行う。ただし、駐車場21が屋内駐車場の場合には、GPS受信機5においてGPS衛星からの電波を受信できなくなるので、自立航法センサ7に基づく自車位置および車両方位のデータのみに基づいてマップマッチング処理を行う。
【0044】
駐車場21への進入後にマップマッチング処理を行う際には、仮想道路リンク設定部15cにより設定された仮想道路リンク23を利用して、自立航法の誤差により発生するオフセットを必要に応じて修正する。すなわち、必要に応じて自車位置を仮想道路リンク23上に引き付ける処理を行う。仮想道路リンク23を用いることにより、自立航法の誤差を蓄積させずに済むようになる。
【0045】
外れ位置判定部15eは、仮想道路リンク設定部15cにより設定された仮想道路リンク23から自車位置が外れたときに、その外れた場所が、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であるかどうかを判定する。ここで、仮想道路リンク23から自車位置が外れたか否かは、地図データメモリ11に設定されている仮想道路リンク23の位置と、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置のデータとを比較することによって判定する。また、その外れた場所が、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であるかどうかは、仮想道路リンク23が持っているリンクの距離情報と、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置のデータとに基づいて判定する。
【0046】
仮想道路リンク設定部15cは、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所で自車位置が仮想道路リンク23から外れたことが外れ位置判定部15eによって検出されたときに、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23を設定し直す。
【0047】
図3に示した要領で仮想道路リンク23を設定した場合、その仮想道路リンク23の設定位置は、駐車場21における実際の通路の位置と一致していない可能性がある。その場合、車両が駐車場21の中を走行すると、その走行位置と仮想道路リンク23の位置との間には当然に誤差が生じるので、マップマッチング処理によって自車位置が誤った仮想道路リンク23に引き付けられてしまう。したがって、一度設定した仮想道路リンク23は、車両の実際の走行状態に応じて適宜修正するのが好ましい。
【0048】
ただし、仮想道路リンク23から自車位置が外れたら常に仮想道路リンク23を設定し直すようにすると、マップマッチング処理が全く行われなくなってしまうので、好ましくない。そこで、本実施形態では、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所で自車位置が仮想道路リンク23から外れたときにのみ仮想道路リンク23を設定し直し、そうでない場合には、仮想道路リンク23を再設定することなくそのままマップマッチング処理を行うようにしている。所定の距離は、例えば、リンクの距離(ノード間の距離で、上述の例では15.5m)の1/3あるいは1/4とすることが可能である。
【0049】
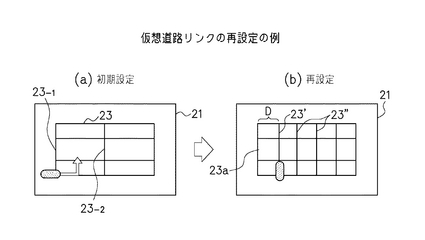
図5は、仮想道路リンク23の再設定の例を示す図である。この図5は、駐車場21が長方形をしている場合の例である。図5(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図5(b)は、その後の車両の走行状態に応じて再設定される仮想道路リンク23’,23”を示している。
【0050】
図5(a)に示す例は、互いに隣接する仮想道路リンク23-1,23-2の両方(当該仮想道路リンク23-1,23-2の一方端を構成する各ノード)から所定距離以上離れた場所で車両が左折することによって自車位置が仮想道路リンク23から外れた状態を示している。このような状態が外れ位置判定部15eによって検出されると、仮想道路リンク設定部15cは、図5(b)に示すように、左折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。再設定する仮想道路リンク23’,23”の間隔は、駐車場法に従ってあらかじめ定めた間隔でも良いし、外枠の仮想道路リンク23aと最初に追加した仮想道路リンク23’との距離Dでも良い。
【0051】
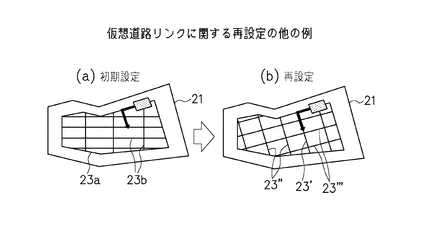
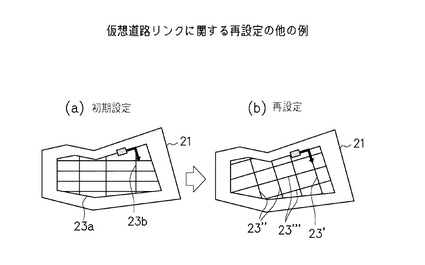
図6は、仮想道路リンク23の再設定に関する他の例を示す図である。この図6は、駐車場21が複雑な形状をしている場合の例である。図6(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図6(b)は、その後の車両の走行状態に応じて再設定される仮想道路リンク23’,23”,23’’’を示している。
【0052】
図6(a)に示す例は、互いに隣接する仮想道路リンクの両方(当該仮想道路リンクの一方端を構成する各ノード)から所定距離以上離れた場所で車両が左折することによって自車位置が仮想道路リンク23から外れた状態を示している。このような状態が外れ位置判定部15eによって検出されると、仮想道路リンク設定部15cは、図6(b)に示すように、左折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。さらに、これらの仮想道路リンク23’,23”に対して垂直な方向に仮想道路リンク23’’’を再設定する。このように、仮想道路リンク23から外れた後の自車の走行方向が元の仮想道路リンク23を構成する格子の一辺と平行でないときは、元の格子状の仮想道路リンク23bを消して、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定する。
【0053】
なお、図5および図6の例では、初期設定された仮想道路リンク23においてノードがない位置で車両が曲がることによって自車位置が仮想道路リンク23から外れる例について説明しているが、これに限定されない。例えば、車両が直進中のときでも、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所を走行していることが外れ位置判定部15eによって検出されたときは、そのときの走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直す。
【0054】
ここまでに示した仮想道路リンク23の初期設定の方法は単なる一例に過ぎず、これに限定されるものではない。例えば、図7に示すように、駐車場21の外形によらず、駐車場21の中に入る大きさで外形が矩形の格子状の仮想道路リンク23を設定するようにしても良い。この場合における矩形の仮想道路リンク23は、例えば、駐車場21に面した道路22を表す道路リンクに直交するように設定する。このように初期設定した場合も同様に、駐車場21内における車両の走行状態に応じて仮想道路リンク23を適宜修正する。
【0055】
退出判定部15fは、車両が駐車場21から退出したか否かを判定する。車両が駐車場21から退出したか否かの判定は、様々な手法を用いて行うことが可能であり、本発明ではその手法は問わない。例えば、地図データメモリ11に格納されている地図データと、GPSデータ記憶部13または車両位置・方位計算部14から出力される自車の位置データとに基づいて、描画レイヤに含まれている施設エリアのポリゴンデータで示される区画内から自車位置が出たか否かを検出することによって駐車場21からの退出を判定することが可能である。
【0056】
また、車両が路車間通信装置を搭載している場合には、駐車場21の出口付近で路車間通信装置が駐車場21の設備から信号を受信したか否かによって駐車場21からの退出を判定することも可能である。また、屋内駐車場の場合には、GPS受信機5にてGPS衛星からの電波を受信できるようになったか否か(GPSデータ記憶部13からのデータが供給されたか否か)によって駐車場21からの退出を判定することも可能である。
【0057】
さらに、図4に示したように入口の仮想道路リンク23cを設定している場合は、その入口の仮想道路リンク23cを進入時とは逆方向に自車位置が移動したか否かを検出することによって、駐車場21からの退出を判定することが可能である。多くの駐車場21は入口と出口とが同じであることが多いため、このような判定方法が可能である。入口の仮想道路リンク23cは実際の走行軌跡に従って設定されているから、実際の通路との誤差はほとんど無い。しかも、駐車場21内では外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bを用いたマップマッチング処理により自立航法の誤差が修正されているので、駐車場21内での自車位置もほぼ正確に捉えられている。したがって、入口の仮想道路リンク23cを駐車場21からの退出判定に用いることにより、駐車場21からの退出をより確実に検出することができる。
【0058】
駐車場21が屋内駐車場でGPS衛星からの電波を受信できず、自立航法センサ7に基づく自車位置および車両方位のデータのみに基づいてマップマッチング処理を行っていた場合、マップマッチング処理部15dは、退出判定部15fにより駐車場21からの退出が検出されたことに応答して、GPS受信機5に基づく自車位置および車両方位のデータと自立航法センサ7に基づく自車位置および車両方位のデータとを用いたマップマッチング処理を行うようにする。
【0059】
16は車両位置マーク発生部であり、車両位置修正部15によってマップマッチング処理された後の車両現在位置を入力して、自車位置を表す車両位置マークを発生する。17は地図描画制御部であり、地図データメモリ11に格納された地図データと、車両位置マーク発生部16により発生された車両位置マークとに基づいて、車両位置周辺の地図を車両位置マークと共にディスプレイ装置8に表示させるのに必要な地図画像データを生成する。
【0060】
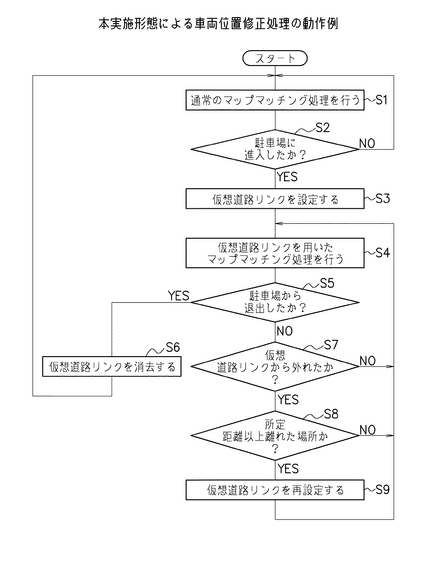
次に、上記のように構成した本実施形態によるナビゲーション装置の動作について説明する。図8は、本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。図8において、マップマッチング処理部15dは、車両の走行中において、地図データメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置および車両方位のデータと、GPSデータ記憶部13に格納されたGPS受信機5による自車位置および車両方位のデータとを用いて、車両走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正している(ステップS1)。
【0061】
このようなマップマッチング処理の実行中に、進入判定部15bは、駐車場21に車両が進入したか否かを判定する(ステップS2)。ここで、駐車場21への進入が検出されなければ、ステップS1のマップマッチング処理をそのまま続行する。一方、駐車場21への車両の進入が検出されると、仮想道路リンク設定部15cは、地図データメモリ11に格納されている道路リンク情報を含む道路データと、駐車場21の外形情報を含むポリゴンデータとを含んだ地図データを用いて、駐車場21の内部に仮想道路リンク23を設定する(ステップS3)。
【0062】
このとき仮想道路リンク設定部15cは、まず、駐車場21に進入してから所定距離の走行軌跡に沿って入口の仮想道路リンク23cを設定する。その後、駐車場21の外形に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。なお、この場合の走行軌跡情報は、走行軌跡記憶部15aが、所定時間毎あるいは所定走行距離毎に、例えば車両位置・方位計算部14によって自立航法センサ7の出力データから演算された車両の現在位置および走行方位のデータを順次記憶したものである。この走行軌跡情報は、駐車場21に入る前の道路の走行中から継続して取得するようにしても良いし、駐車場21への進入を検出してから取得し始めても良い。
【0063】
仮想道路リンク23が設定されると、マップマッチング処理部15dは、その設定された仮想道路リンク23を利用して、必要に応じて自車位置を仮想道路リンク23上に引き付けるマップマッチング処理を行うことによって自車位置を修正する(ステップS4)。このようなマップマッチング処理を行っている際に、退出判定部15fは、車両が駐車場21から退出したか否かを判定する(ステップS5)。退出していれば、ステップS3で設定した仮想道路リンク23を地図データメモリ11から消去して(ステップS6)、ステップS1に戻る。
【0064】
一方、車両が駐車場21から退出していなければ、外れ位置判定部15eは、駐車場21内に設定されている仮想道路リンク23から自車位置が外れたか否かを判定する(ステップS7)。外れていなければ、ステップS4のマップマッチング処理をそのまま続行する。一方、仮想道路リンク23から自車位置が外れたことが検出された場合には、外れ位置判定部15eは更に、その外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する(ステップS8)。
【0065】
ここで、仮想道路リンク23から自車位置が外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所でない場合には、ステップS4のマップマッチング処理をそのまま続行する。また、所定距離以上離れた場所であった場合には、仮想道路リンク設定部15cは、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直して(ステップS9)、ステップS4のマップマッチング処理に戻る。
【0066】
以上詳しく説明したように、本実施形態によれば、車両が駐車場21に進入したことが検出されたときに、駐車場21の内部に仮想道路リンク23を設定し、当該仮想道路リンク23を利用してマップマッチング処理を行うようにしている。これにより、車両が駐車場21に進入すると、その時点でリアルタイムに駐車場21内に仮想道路リンク23が設定され、設定された仮想道路リンク23に対してマップマッチングによる車両位置の引き付けが必要に応じて行われることとなる。したがって、駐車場21内の通路に道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、駐車場21内における車両の正確な位置を推定することができる。
【0067】
また、本実施形態では、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所において仮想道路リンク23から自車位置が外れたときに、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直すようにしている。これにより、最初に設定した仮想道路リンク23と駐車場21内の実際の通路との間にずれがあっても、仮想道路リンク23を適宜再設定することによって実際の通路に合わせてずれを無くしていくことができる。したがって、駐車場21内における車両の位置をより正確に推定することができる。
【0068】
なお、上記実施形態では、外れ位置判定部15eを設け、仮想道路リンク23から自車位置の外れた場所が互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であることを外れ位置判定部15eが検出したときに、仮想道路リンク23を再設定する例について説明したが、本発明はこれに限定されない。例えば、図9に示すように、外れ位置判定部15eの代わりに外れ方向判定部15gを設けても良い。
【0069】
外れ方向判定部15gは、車両の走行方向が、仮想道路リンク設定部15cにより初期設定された元の仮想道路リンク23を構成する格子の一辺の方向から外れたかか否かを判定する。そして、外れ方向判定部15gにより車両の走行方向が元の仮想道路リンク23を構成する格子の一辺の方向から外れたと判定されたときに、仮想道路リンク設定部15cは、元の格子状の仮想道路リンク23bを消して、車両の走行方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す。
【0070】
図10は、外れ方向判定部15gを用いた仮想道路リンク23の再設定に関する例を示す図である。この図10は、駐車場21が複雑な形状をしている場合の例である。図10(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図10(b)は、その後の駐車場21内における車両の走行状態に応じて再設定される仮想道路リンク23’,23”,23’’’を示している。
【0071】
図10(a)に示す例は、任意の場所で車両が右折することによって自車位置が仮想道路リンク23から外れた状態を示している。図10のような複雑な形状の駐車場21では、初期設定された仮想道路リンク23のノードが存在する位置で右折したとしても、図10(a)のように、右折後の車両の進行方向と、格子状の仮想道路リンク23bの方向との間にずれが生じる場合がある。そこで、外れ方向判定部15gでは、自車の走行方向が、元の仮想道路リンク23を構成する格子の一辺と平行でなくなったかどうか、つまり、右折後の車両の進行方向と格子の一辺の方向との間にずれが生じたか否かを判定する。
【0072】
右折後の車両の進行方向と格子の一辺の方向との間のずれが外れ方向判定部15gによって検出されると、仮想道路リンク設定部15cは、図10(b)に示すように、右折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。さらに、これらの仮想道路リンク23’,23”に対して垂直な方向に仮想道路リンク23’’’を再設定する。このとき、元の格子状の仮想道路リンク23bは消去する。
【0073】
なお、外れ方向判定部15gを用いる場合も、車両の進行方向と格子の一辺の方向との間にずれが生じた場合に一律に仮想道路リンク23の再設定を行うのではなく、そのずれ量が所定角度以上の場合にのみ仮想道路リンク23を設定し直すようにすることが好ましい。
【0074】
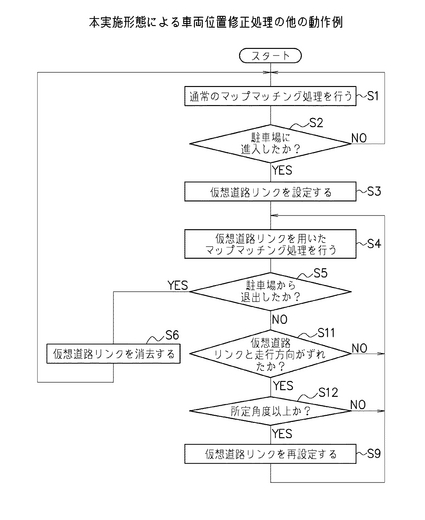
図11は、外れ方向判定部15gを用いたナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。図11に示すように、外れ方向判定部15gを用いた場合の車両位置修正処理は、図8におけるステップS7,S8の処理をステップS11,S12に置き換えることによって実現することが可能である。
【0075】
ステップS11では、外れ方向判定部15gによって、車両の走行方向が、仮想道路リンク設定部15cにより設定された元の仮想道路リンク23を構成する格子の一辺の方向から外れたか否かを判定する。また、ステップS12では、方向がずれた場合のそのずれ量が所定角度以上か否かを判定する。そして、車両の走行方向が元の仮想道路リンク23を構成する格子の一辺の方向に対して所定角度以上外れていることが検出された場合に、仮想道路リンク設定部15cが格子状の仮想道路リンク23’,23”,23’’’を設定し直す(ステップS9)。
【0076】
なお、図1および図9では、外れ位置判定部15eおよび外れ方向判定部15gの何れか一方のみを用いる例について示しているが、その両方を用いて車両位置修正部15を構成するようにしても良い。
【0077】
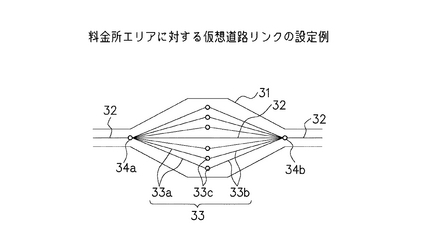
また、上記実施形態では、所定以上の幅員または広さを持つ施設エリアの例として駐車場21を挙げたが、これに限定されない。例えば、有料道路の料金所エリアでも良い。図12は、料金所エリアに対する仮想道路リンクの設定例を示す図である。図12において、32は通常の道路リンク、33は広義の仮想道路リンクであり、狭義の仮想道路リンク33a,33bと仮想的なノード33cとを含む。34a,34bは通常のノードである。
【0078】
図12に示すように、料金所エリア31の場合、仮想道路リンク設定部15cは、料金所エリア31の入口に当たる1つのノード34aから一列に並んだ各料金所に当たる複数のノード33cに至るコースの各々に仮想道路リンク33aを設定するとともに、複数のノード33cから料金所エリア31の出口に当たる1つのノード34bに至るコースの各々に仮想道路リンク33bを設定する。
【0079】
また、駐車場21か料金所エリア31かのどちらか一方に対してのみ仮想道路リンクを設定することのほかに、その両方に対して仮想道路リンクを設定するようにしても良い。ただし、駐車場21に対する仮想道路リンクの設定方法と料金所エリア31に対する仮想道路リンクの設定方法とは異なっているので、ポリゴンデータで表される施設エリアが駐車場21か料金所エリア31かを判別し、その結果に応じて仮想道路リンクを設定する必要がある。
【0080】
図13は、駐車場21にも料金所エリア31にも対応可能に構成したナビゲーション装置の構成例を示す図である。図13に示すナビゲーション装置は、車両位置修正部15がエリア判定部15hを更に備えている。エリア判定部15hは、進入判定部15bによって進入が検出された施設エリアが駐車場21か料金所エリア31かを判定する。この判定は、例えばポリゴンデータの付属情報として施設の種類を示す情報を付けておき、それを利用して行うことができる。
【0081】
仮想道路リンク設定部15cは、エリア判定部15hによる判定の結果に応じて仮想道路リンクの設定内容を変える。すなわち、施設エリアが駐車場21の場合は、例えば駐車場21の外形に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。また、施設エリアが料金所エリア31の場合は、料金所エリア31の入口に当たる1つのノード34aから一列に並んだ各料金所に当たる複数のノード33cに至るコースの各々と、複数のノード33cから料金所エリア31の出口に当たる1つのノード34bに至るコースの各々とに仮想道路リンク33a,33bを設定するようにする。
【0082】
また、上記実施形態では、施設エリアが地図データにおいてポリゴンデータとして記憶されている例について説明したが、これに限定されない。必ずしもポリゴンとして施設エリアの形状が表されている必要はなく、これ以外の形式で形状や大きさが表されたデータであっても良い。
【0083】
また、上記実施形態では、移動体の例として車両を挙げたが、これに限定されない。例えば、移動体が携帯用のナビゲーション装置を持った人間であっても良い。ただし、移動体が人間の場合、有料道路の料金所エリア31に関する実施形態は適用されない。また、移動体が人間の場合、施設エリアは駐車場21に限らず、内部に通路が存在する施設であれば適用することが可能である。
【0084】
また、上記実施形態では、地図データ中の全ての駐車場に仮想道路リンクを設定する例について説明したが、本発明はこれに限定されない。例えば、一部の大規模駐車場や必要性の高い駐車場(アミューズメントパークなど)については、実際の通路に即した道路リンクを地図データ中にあらかじめ用意しておき、それ以外の駐車場に対して仮想道路リンクを設定するようにしても良い。
【0085】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0086】
本発明は、マップマッチング機能を備えたナビゲーション装置に有用である。車両の走行案内をする車載用ナビゲーション装置に限らず、人間の歩行案内をする携帯用ナビゲーション装置にも有用である。
【図面の簡単な説明】
【0087】
【図1】本実施形態によるナビゲーション装置の構成例を示す図である。
【図2】本実施形態による仮想道路リンクの設定例を示す図である。
【図3】駐車場法に従った本実施形態による仮想道路リンクの設定例を示す図である。
【図4】入口の仮想道路リンクを用いた本実施形態による仮想道路リンクの設定例を示す図である。
【図5】本実施形態による仮想道路リンクの再設定例を示す図である。
【図6】本実施形態による仮想道路リンクの他の再設定例を示す図である。
【図7】本実施形態による仮想道路リンクの他の設定例を示す図である。
【図8】本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。
【図9】本実施形態によるナビゲーション装置の他の構成例を示す図である。
【図10】本実施形態による仮想道路リンクの再設定に関する他の例を示す図である。
【図11】本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れに関する他の例を示すフローチャートである。
【図12】本実施形態による仮想道路リンクの他の設定例を示す図である。
【図13】本実施形態によるナビゲーション装置の他の構成例を示す図である。
【符号の説明】
【0088】
11 地図データメモリ
15 車両位置修正部
15a 走行軌跡記憶部
15b 進入判定部
15c 仮想道路リンク設定部
15d マップマッチング処理部
15e 外れ位置判定部
15f 退出判定部
15g 外れ方向判定部
15h エリア判定部
【技術分野】
【0001】
本発明は、ナビゲーション装置および移動体位置修正方法に関し、特に、いわゆるマップマッチングを行うことによって自立航法による自車位置の誤差を修正する方法に関するものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自立航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置において、車両の現在位置を測定することは不可欠である。このため、車両に搭載した距離センサおよび角度センサを用いて車両の相対位置を測定する測定法(自立航法)と、複数のGPS衛星から送られてくる電波を受信してn次元測位処理によって車両の絶対位置を測定する測定法(衛星航法)とが実用化されている。
【0004】
自立航法は、比較的低コストで車両位置を測定できるが、高精度に位置測定ができない問題があり、マップマッチング処理等の補正処理が必要になる。すなわち、自立航法では、車両が走行するにつれて誤差が累積し、車両位置が道路から外れてしまう。そこで、マップマッチング処理によって車両位置を道路データと照合し、必要に応じて車両位置を道路上に修正する。道路データは、交差点や分岐など複数の道路が交わる点を表すノードと、隣接するノード間を結ぶベクトルを表す道路リンクとから構成されている。車両位置を道路上に修正するというのは、具体的には車両位置を道路リンク上に引き付ける処理のことを言う。
【0005】
マップマッチングの方法は種々提案されている。例えば、車両の走行軌跡(所定走行距離毎の位置と方位)を保存しておき、地図上でその走行軌跡と同形の道路を求め、当該道路上のポイントに車両位置を修正する方法がある。具体的には、保存した走行軌跡の形状と道路リンクの形状とを比較して、当該道路リンクが走行軌跡と一定以上の類似度を持った形状であった場合に、車両位置をその道路リンクへ引き付ける処理を行う。この他に、投影法によるマップマッチングの方法も存在する。処理の詳細について割愛するが、この投影法も、所定の条件を満たした道路リンクに車両位置を引き付ける処理を行うものである。
【0006】
ところが、地図データベース中に道路リンクが存在しない領域、例えば駐車場や空き地などを走行する場合において、自車位置の近くに自車方位に近い方位を持つ道路リンクが存在すると、道路外の駐車場や空き地を走行中であるにもかかわらず、マップマッチングによって自車位置が道路上に修正されてしまうという問題があった。このような問題を解決するために、自車が駐車場内を走行中か否かを判定し、駐車場内を走行中のときは、自立航法により算出した自車位置をそのまま表示用の位置とすることにより、駐車場内での自車位置を示すことができるようにした技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2000−310542号公報
【0007】
また、高速道路の料金所エリアは通常の道路よりも幅が広く、車両がコースを変えて自由に走行可能であるが、地図データベース上では1本の細い線状の道路リンクしか設定されていない。そのため、車両がコースを大きく変えて走行した場合に、設定されている道路リンクから自車位置が外れてマップマッチング処理が行われ、そのときの自車位置の近くに存在する他の道路上に自車位置が修正されてしまうという問題もあった。このような問題を解決するために、所定以上の幅員または広さを持つエリアをあらかじめ面データ化して面状の道路リンクとすることにより、車両位置が面データ内にあればマッチング外れを起こさないようにした技術が提案されている(例えば、特許文献2参照)。
【特許文献2】特開2002−107163号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1,2に記載された技術では、駐車場や料金所エリア以外の他の道路に対して自車位置が修正されてしまうという不都合は回避できるものの、駐車場や料金所エリアの中の正確な自車位置を測定することはできない。駐車場内の通路や料金所エリア内の各料金所へのコースに関する道路リンクが存在しないので、自立航法によって蓄積された自車位置の誤差を修正することができないからである。特に、駐車場などでは、車両が比較的右折または左折やカーブを繰り返して走行するので、方位変化量が多くなって自車位置の誤差が蓄積され、正確な自車位置を測定することが困難となる。
【0009】
これに対して、屋内駐車場の範囲や、その駐車場内の構内道路(通路)、車両が駐車すべきスペースのデータを含んだ地図データをあらかじめ用意しておき、車両が屋内駐車場内で直線移動している状態であることが検出されたときに、算出した現在の進行方位を地図データの道路方位に応じて補正するようにした技術が提案されている(例えば、特許文献3参照)。
【特許文献2】特開2002−318122号公報
【0010】
しかし、これでは地図データのデータ量が膨大となり、大規模な記憶容量が必要となる。最近では大容量のハードディスクを搭載したナビゲーション装置も提供されているが、地図データの記録媒体としてDVD(Digital Versatile Disk)を用いたものが主流である。全国には非常に多くの駐車場が存在しており、それらの全てについて構内道路に道路データを持たせると、データ量がDVDの記憶容量を越えてしまう。そのため、構内道路に道路データを持たせることができるのは、一部の大規模駐車場や必要性の高い駐車場(アミューズメントパークなど)に限定せざるを得ず、それ以外の駐車場等では正確な自車位置を測定することができないという問題を生じる。
【0011】
また、車両の走行中や誘導経路の探索時などには、ハードディスクやDVDに記録されている全国の地図データの中から、自車位置の周辺の地図データをメモリに読み出して所定の処理が行われる。しかし、駐車場の構内道路や料金所エリアの走行コースに道路データを持たせることによって地図データのデータ量が肥大化していると、その読み出しに時間がかかり、処理に大きな負荷を与えてしまう。車両が通常の道路を走行中で駐車場内の道路データが必要でないときも、これを含んだ大量のデータがメモリに読み出されることになるので、その読み出し処理に余計な負荷がかかってしまうという問題を生じる。また、大容量のメモリが必要になるという問題もあった。
【0012】
さらに、全国には膨大な駐車場が存在し、新しい駐車場も日々作られている。したがって、これらの全てを調査して地図データを作成するには膨大な労力と時間を要し、現実的には極めて困難である。この観点からも、構内道路に道路データを持たせることができるのは、一部の大規模駐車場や必要性の高い駐車場に限定せざるを得ず、それ以外の駐車場等では正確な自車位置を測定することができないという問題を生じる。
【0013】
本発明は、このような問題を解決するために成されたものであり、駐車場内の構内道路や料金所エリアの走行コースなどに道路データをあらかじめ登録しておくことなく、駐車場内や料金所エリア内における移動体の正確な位置を推定することができるようにすることを目的とする。
【課題を解決するための手段】
【0014】
上記した課題を解決するために、本発明では、所定以上の幅員または広さを持つ施設エリアに移動体が進入したことが検出されたときに、施設エリアの内部に仮想的な道路リンクを設定し、当該仮想道路リンクを利用してマップマッチング処理を行うようにしている。
【0015】
本発明の他の態様では、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所において仮想道路リンクから現在位置が外れたとき、または、仮想道路リンクから外れた後の移動体の移動方向が格子の一辺と平行でないときに、仮想道路リンクから外れた後の移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すようにしている。
【発明の効果】
【0016】
上記のように構成した本発明によれば、移動体が駐車場や料金所エリアなどの施設エリア内に進入すると、その時点でリアルタイムに当該施設エリア内に仮想的な道路リンクが設定され、設定された仮想道路リンクに対してマップマッチングによる現在位置の引き付けが必要に応じて行われることとなる。したがって、駐車場内の構内道路や料金所エリアの走行コースなどに道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、施設エリア内における移動体の正確な位置を推定することができるようになる。
【0017】
本発明の他の特徴によれば、移動体の施設エリアへの進入に応じて仮想道路リンクが設定された後、移動体の移動状態に応じて仮想道路リンクが再設定されることとなる。これにより、最初に設定した仮想道路リンクと実際の構内道路や走行コースとの間にずれがあっても、仮想道路リンクを適宜再設定することによって実際の構内道路や走行コースに合わせてずれを無くしていくことができる。したがって、施設エリア内における移動体の位置をより正確に推定することができるようになる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の構成例を示す図である。図1において、1はシステムコントローラであり、ナビゲーション装置の全体を制御する。このシステムコントローラ1は、マイクロコンピュータ等により構成され、地図や車両位置マークの描画処理、位置修正処理などを行う。
【0019】
2はDVD−ROM(Digital Versatile Disk - Read Only Memory)などの地図記憶媒体であり、地図表示や経路探索などに必要な各種の地図データが記憶されている。なお、ここでは地図データを記憶する記録媒体としてDVD−ROM2を用いているが、CD−ROM、ハードディスクなどの他の記憶媒体を用いても良い。3はDVD制御部であり、DVD−ROM2からの地図データの読み取りを制御する。
【0020】
DVD−ROM2に記憶されている地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路探索等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。描画ユニットには、建物や河川等を表示するために必要な背景レイヤのデータと、市町村名や道路名等を表示するために必要な文字レイヤのデータと、駐車場や有料道路の料金所エリアなどのように所定以上の幅員または広さを持つ施設エリアを表示するために必要な施設レイヤのデータとが含まれている。施設レイヤのデータは、施設エリアの位置データや施設エリアの外形情報を含む描画データ(ポリゴンデータ)を含んでいる。
【0021】
上述の道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含んでいる。すなわち、道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクテーブルとが含まれている。
【0022】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、属性フラグ、交通規制の数、交通規制レコード等の情報が含まれている。正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。属性フラグは、そのノードが交差点ノードであるか否かを示す交差点ノードフラグを含んでいる。交通規制の数は、そのノードに接続されているリンクに右折禁止やUターン禁止等の交通規制が存在する場合に、その交通規制の数を示す。交通規制レコードは、上述した交通規制が存在する場合にはその数に対応した交通規制の具体的な内容を示す。
【0023】
また、リンクテーブルには、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。リンクのコストは、そのリンクを走行する場合の所要時間を道路種別等から計算により求めて、そのリンクの通過に必要な時間を例えば分単位で示したものである。道路属性フラグは、そのリンクに関する各種の属性を示す。道路種別フラグは、そのリンクに対応した実際の道路が高速道路であるか一般道であるかといった種別を示す。このリンクテーブルには、道路に対応したリンクの情報が含まれているが、駐車場内の構内道路(通路)や料金所エリアの走行コースに対応したリンクの情報は含まれていない。
【0024】
4は操作部であり、例えばリモートコントローラ(リモコン)により構成される。この操作部4は、搭乗者がシステムコントローラ1に対して各種の情報(例えば、経路誘導の目的地や経由地)を設定したり、各種の操作(例えば、画面スクロールや地図検索、拡大/縮小、最適経路探索など)を行ったりするための各種操作子(ボタンやジョイスティック等)を備えており、操作子の操作状態に応じた赤外線信号がシステムコントローラ1に向けて送信される。なお、この操作部4は、後述するディスプレイ装置8の画面上に設けたタッチパネル等によって構成しても良い。
【0025】
5はGPS受信機であり、複数のGPS衛星から送られてくる電波をGPSアンテナ6で受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。そして、これらの計算した車両の絶対位置および方位の情報を、測位時刻と共にシステムコントローラ1に出力する。
【0026】
7は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)7aと、所定走行距離毎に1個のパルスを出力する距離センサ7bとを備えている。自立航法センサ7は、これらの角度センサ7aおよび距離センサ7bによって車両の相対位置および方位を検出し、その情報をシステムコントローラ1に出力する。
【0027】
8はディスプレイ装置であり、システムコントローラ1から出力される画像データに基づいて、自車周辺の地図情報を車両位置マークや各種ランドマークと共に表示したり、この地図上に走行軌跡や誘導経路を表示したり、車両の位置が交差点近傍に近づいたときに交差点拡大図を表示したりする。
【0028】
次に、システムコントローラ1の詳細な構成について説明する。11は地図データメモリであり、DVD−ROM2から読み出された地図データを一時的に格納するためのものである。12は地図読出制御部であり、DVD−ROM2から地図データを読み出す際の制御を行う。地図読出制御部12は、車両位置修正部15から車両現在位置の情報を入力し、その車両現在位置を含む所定範囲の地図データをDVD−ROM2から読み出して地図データメモリ11に格納する。
【0029】
13はGPSデータ記憶部であり、GPS受信機5から出力される自車の絶対的な位置および方位のデータを順次格納する。14は車両位置・方位計算部であり、自立航法センサ7から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。
【0030】
15は車両位置修正部であり、走行軌跡記憶部15a、進入判定部15b、仮想道路リンク設定部15c、マップマッチング処理部15d、外れ位置判定部15eおよび退出判定部15fをその機能構成として備えている。走行軌跡記憶部15aは、GPSデータ記憶部13または車両位置・方位計算部14より出力されるデータに基づいて、所定時間毎あるいは所定走行距離毎の車両位置と車両方位の情報を走行軌跡として記憶する。
【0031】
進入判定部15bは、車両が駐車場等の施設エリアに進入したか否かを判定する。車両が駐車場に進入したか否かの判定は、様々な手法を用いて行うことが可能であり、本発明ではその手法は問わない。例えば、地図データメモリ11に格納されている地図データ(描画レイヤに含まれている施設エリアの位置データとポリゴンデータ)と、GPSデータ記憶部13または車両位置・方位計算部14から出力される自車の位置データとに基づいて、ポリゴンデータで示される区画内に自車位置が入ったか否かを検出することによって駐車場への進入を判定することが可能である。また、車両が路車間通信装置を搭載している場合には、駐車場の入口付近で路車間通信装置が駐車場の設備から信号を受信したか否かによって駐車場への進入を判定することも可能である。また、屋内駐車場の場合には、GPS受信機5にてGPS衛星からの電波を受信できなくなったか否か(GPSデータ記憶部13からのデータが無くなったか否か)によって駐車場への進入を判定することも可能である。
【0032】
仮想道路リンク設定部15cは、進入判定部15bにより駐車場への進入が検出されたときに、地図データメモリ11に格納されている地図データを用いて、駐車場の内部に仮想的な道路リンクを設定する。このとき仮想道路リンク設定部15cは、例えば図2(a)〜(c)に示すように、駐車場21の外形(ポリゴンデータの形状)に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。格子状の仮想道路リンク23bは、例えば格子の一辺が、駐車場21に面した道路(その道路に対応する道路リンク)22に直交するように設定する。
【0033】
なお、2つ以上の仮想道路リンクが接する点および交わる点は、ノードとして設定する。以下では、このノードも含めて仮想道路リンクと呼ぶ(ノードを含めたものを広義の仮想道路リンク、ノードを含めないものを狭義の仮想道路リンクとし、特に区別しない限り広義の仮想道路リンクを言うものとする)。このようにして設定した仮想道路リンク23(外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23b)の情報は、例えば、地図データ中にあらかじめ含まれている道路のリンク情報やノード情報と同様の構成としても良いし、最低限必要な情報だけから構成しても良い。例えば、各ノードの位置情報、各ノードに接続するリンクの距離の情報から構成することが可能である。設定された仮想道路リンク23は、地図データメモリ11に格納される。
【0034】
格子状の仮想道路リンク23bが有する格子の幅は、あらかじめ決められた間隔(例えば、駐車場法に従って定める)で割り当てられ、格子の本数は駐車場21の広さによって変化する。駐車場法によれば、車両一台分の駐車スペースは、幅2.3m以上、奥行き5m以上のサイズが基本である。また、駐車場内の通路幅は5.5m以上が基本であり、一方通行の場合は3.5m以上である。このような内容に従って、仮想道路リンク設定部15cが格子状の仮想道路リンク23bを設定するときは、縦横15.5m{=(駐車スペースの奥行き+通路幅の半分)×2=(5+2.75)×2}おきの格子を設定する。また、仮想道路リンク設定部15cが外枠の仮想道路リンク23aを設定するときは、駐車場21の外周部にも駐車スペースがあることを考慮して、外周から7.75m(=15.5÷2)だけ内側の位置に外枠の仮想道路リンク23aを設定する。
【0035】
図3は、駐車場法に従ってあらかじめ定めた間隔毎に長方形の駐車場21に対して仮想道路リンク23(外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23b)を設定する場合の例を示す図である。なお、図3において、24は駐車スペースを示している。
【0036】
図3に示すように、駐車場21の外形が縦50m×横100mの長方形である場合、駐車場21の外周から7.75mだけ内側の位置に外枠の仮想道路リンク23aを設定するとともに、その外枠の仮想道路リンク23aの中に、縦横15.5mおきに格子状の仮想道路リンク23bを設定する。格子状の仮想道路リンク23bを設定する際には、外枠の仮想道路リンク23aが持つ1つの角を基準点として、縦横15.5mの位置を順番に決めていく。このようにすると、図3の例では縦方向に2本、横方向に5本の仮想道路リンク23bが設定される。
【0037】
規準点は任意に決めてよいが、例えば駐車場21の入口に一番近い角とする。入口の位置は、ポリゴンデータの付属情報として入口の位置を示す情報が付いていれば、それを利用して判別することができる。また、進入判定部15bによって駐車場21への進入が検出されたときにGPSデータ記憶部13または車両位置・方位計算部14から出力される自車位置データや、走行軌跡記憶部15aに記憶されている走行履歴データに基づいて入口の位置を判別することも可能である。
【0038】
なお、ここでは仮想道路リンク23を構成する要素として外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bの2つを例に挙げたが、駐車場21の入口に仮想道路リンクを更に設定しても良い。図4は、入口の仮想道路リンク23cを設定する場合の例を示す図である。図4に示すように、進入判定部15bにより駐車場21への進入が検出されたら、仮想道路リンク設定部15cは、まず走行軌跡記憶部15aに格納された走行軌跡データを用いて、駐車場21に進入してから所定距離(例えば、7.75m)の走行軌跡に沿って駐車場21の入口部分に入口の仮想道路リンク23cを設定する。その後、駐車場21の外形を基準にして、図3に示した要領で外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bを設定する。
【0039】
入口の仮想道路リンク23cは必ずしも設定する必要はないが、退出判定部15fによって車両が駐車場21から退出したか否かの判定を行う際に、この入口の仮想道路リンク23cを利用すると判定がしやすくなる点で、入口の仮想道路リンク23cは設定するのが好ましい。
【0040】
マップマッチング処理部15dは、地図データメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置および車両方位のデータと、GPSデータ記憶部13に格納されたGPS受信機5による自車位置および車両方位のデータとを用いて、車両走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0041】
自立航法センサ7に基づく自車位置および車両方位のデータを用いたマップマッチングでは、例えば、走行軌跡記憶部15aに格納されている走行軌跡(所定走行距離毎の位置と方位)と同形の道路リンクを地図データ中から求め、当該道路リンク上のポイントに車両位置マークを引き付ける処理を行う。また、公知の投影法によるマップマッチングの方法を用いても良い。
【0042】
自立航法では、誤差が蓄積されて車両位置が道路リンクから大きく外れると、車両位置を実際の道路リンク上の現在位置にマップマッチングすることができない。すなわち、走行軌跡によるマップマッチング方法では走行軌跡と同形の道路を探すことができなくなり、投影法によるマップマッチング方法ではマッチングさせるための条件を満足する道路を探すことができなくなる。このように自立航法によるマップマッチングが不可能になったときには、GPS受信機5から得られる位置データと方位データとを用いて、自立航法センサ7による車両位置と走行方位とを修正する。
【0043】
進入判定部15bにより駐車場21への進入が検出された後も、基本的には、自立航法センサ7に基づく自車位置および車両方位のデータと、GPS受信機5に基づく自車位置および車両方位のデータとを用いてマップマッチング処理を行う。ただし、駐車場21が屋内駐車場の場合には、GPS受信機5においてGPS衛星からの電波を受信できなくなるので、自立航法センサ7に基づく自車位置および車両方位のデータのみに基づいてマップマッチング処理を行う。
【0044】
駐車場21への進入後にマップマッチング処理を行う際には、仮想道路リンク設定部15cにより設定された仮想道路リンク23を利用して、自立航法の誤差により発生するオフセットを必要に応じて修正する。すなわち、必要に応じて自車位置を仮想道路リンク23上に引き付ける処理を行う。仮想道路リンク23を用いることにより、自立航法の誤差を蓄積させずに済むようになる。
【0045】
外れ位置判定部15eは、仮想道路リンク設定部15cにより設定された仮想道路リンク23から自車位置が外れたときに、その外れた場所が、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であるかどうかを判定する。ここで、仮想道路リンク23から自車位置が外れたか否かは、地図データメモリ11に設定されている仮想道路リンク23の位置と、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置のデータとを比較することによって判定する。また、その外れた場所が、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であるかどうかは、仮想道路リンク23が持っているリンクの距離情報と、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置のデータとに基づいて判定する。
【0046】
仮想道路リンク設定部15cは、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所で自車位置が仮想道路リンク23から外れたことが外れ位置判定部15eによって検出されたときに、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23を設定し直す。
【0047】
図3に示した要領で仮想道路リンク23を設定した場合、その仮想道路リンク23の設定位置は、駐車場21における実際の通路の位置と一致していない可能性がある。その場合、車両が駐車場21の中を走行すると、その走行位置と仮想道路リンク23の位置との間には当然に誤差が生じるので、マップマッチング処理によって自車位置が誤った仮想道路リンク23に引き付けられてしまう。したがって、一度設定した仮想道路リンク23は、車両の実際の走行状態に応じて適宜修正するのが好ましい。
【0048】
ただし、仮想道路リンク23から自車位置が外れたら常に仮想道路リンク23を設定し直すようにすると、マップマッチング処理が全く行われなくなってしまうので、好ましくない。そこで、本実施形態では、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所で自車位置が仮想道路リンク23から外れたときにのみ仮想道路リンク23を設定し直し、そうでない場合には、仮想道路リンク23を再設定することなくそのままマップマッチング処理を行うようにしている。所定の距離は、例えば、リンクの距離(ノード間の距離で、上述の例では15.5m)の1/3あるいは1/4とすることが可能である。
【0049】
図5は、仮想道路リンク23の再設定の例を示す図である。この図5は、駐車場21が長方形をしている場合の例である。図5(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図5(b)は、その後の車両の走行状態に応じて再設定される仮想道路リンク23’,23”を示している。
【0050】
図5(a)に示す例は、互いに隣接する仮想道路リンク23-1,23-2の両方(当該仮想道路リンク23-1,23-2の一方端を構成する各ノード)から所定距離以上離れた場所で車両が左折することによって自車位置が仮想道路リンク23から外れた状態を示している。このような状態が外れ位置判定部15eによって検出されると、仮想道路リンク設定部15cは、図5(b)に示すように、左折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。再設定する仮想道路リンク23’,23”の間隔は、駐車場法に従ってあらかじめ定めた間隔でも良いし、外枠の仮想道路リンク23aと最初に追加した仮想道路リンク23’との距離Dでも良い。
【0051】
図6は、仮想道路リンク23の再設定に関する他の例を示す図である。この図6は、駐車場21が複雑な形状をしている場合の例である。図6(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図6(b)は、その後の車両の走行状態に応じて再設定される仮想道路リンク23’,23”,23’’’を示している。
【0052】
図6(a)に示す例は、互いに隣接する仮想道路リンクの両方(当該仮想道路リンクの一方端を構成する各ノード)から所定距離以上離れた場所で車両が左折することによって自車位置が仮想道路リンク23から外れた状態を示している。このような状態が外れ位置判定部15eによって検出されると、仮想道路リンク設定部15cは、図6(b)に示すように、左折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。さらに、これらの仮想道路リンク23’,23”に対して垂直な方向に仮想道路リンク23’’’を再設定する。このように、仮想道路リンク23から外れた後の自車の走行方向が元の仮想道路リンク23を構成する格子の一辺と平行でないときは、元の格子状の仮想道路リンク23bを消して、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定する。
【0053】
なお、図5および図6の例では、初期設定された仮想道路リンク23においてノードがない位置で車両が曲がることによって自車位置が仮想道路リンク23から外れる例について説明しているが、これに限定されない。例えば、車両が直進中のときでも、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所を走行していることが外れ位置判定部15eによって検出されたときは、そのときの走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直す。
【0054】
ここまでに示した仮想道路リンク23の初期設定の方法は単なる一例に過ぎず、これに限定されるものではない。例えば、図7に示すように、駐車場21の外形によらず、駐車場21の中に入る大きさで外形が矩形の格子状の仮想道路リンク23を設定するようにしても良い。この場合における矩形の仮想道路リンク23は、例えば、駐車場21に面した道路22を表す道路リンクに直交するように設定する。このように初期設定した場合も同様に、駐車場21内における車両の走行状態に応じて仮想道路リンク23を適宜修正する。
【0055】
退出判定部15fは、車両が駐車場21から退出したか否かを判定する。車両が駐車場21から退出したか否かの判定は、様々な手法を用いて行うことが可能であり、本発明ではその手法は問わない。例えば、地図データメモリ11に格納されている地図データと、GPSデータ記憶部13または車両位置・方位計算部14から出力される自車の位置データとに基づいて、描画レイヤに含まれている施設エリアのポリゴンデータで示される区画内から自車位置が出たか否かを検出することによって駐車場21からの退出を判定することが可能である。
【0056】
また、車両が路車間通信装置を搭載している場合には、駐車場21の出口付近で路車間通信装置が駐車場21の設備から信号を受信したか否かによって駐車場21からの退出を判定することも可能である。また、屋内駐車場の場合には、GPS受信機5にてGPS衛星からの電波を受信できるようになったか否か(GPSデータ記憶部13からのデータが供給されたか否か)によって駐車場21からの退出を判定することも可能である。
【0057】
さらに、図4に示したように入口の仮想道路リンク23cを設定している場合は、その入口の仮想道路リンク23cを進入時とは逆方向に自車位置が移動したか否かを検出することによって、駐車場21からの退出を判定することが可能である。多くの駐車場21は入口と出口とが同じであることが多いため、このような判定方法が可能である。入口の仮想道路リンク23cは実際の走行軌跡に従って設定されているから、実際の通路との誤差はほとんど無い。しかも、駐車場21内では外枠の仮想道路リンク23aおよび格子状の仮想道路リンク23bを用いたマップマッチング処理により自立航法の誤差が修正されているので、駐車場21内での自車位置もほぼ正確に捉えられている。したがって、入口の仮想道路リンク23cを駐車場21からの退出判定に用いることにより、駐車場21からの退出をより確実に検出することができる。
【0058】
駐車場21が屋内駐車場でGPS衛星からの電波を受信できず、自立航法センサ7に基づく自車位置および車両方位のデータのみに基づいてマップマッチング処理を行っていた場合、マップマッチング処理部15dは、退出判定部15fにより駐車場21からの退出が検出されたことに応答して、GPS受信機5に基づく自車位置および車両方位のデータと自立航法センサ7に基づく自車位置および車両方位のデータとを用いたマップマッチング処理を行うようにする。
【0059】
16は車両位置マーク発生部であり、車両位置修正部15によってマップマッチング処理された後の車両現在位置を入力して、自車位置を表す車両位置マークを発生する。17は地図描画制御部であり、地図データメモリ11に格納された地図データと、車両位置マーク発生部16により発生された車両位置マークとに基づいて、車両位置周辺の地図を車両位置マークと共にディスプレイ装置8に表示させるのに必要な地図画像データを生成する。
【0060】
次に、上記のように構成した本実施形態によるナビゲーション装置の動作について説明する。図8は、本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。図8において、マップマッチング処理部15dは、車両の走行中において、地図データメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された自立航法センサ7に基づく自車位置および車両方位のデータと、GPSデータ記憶部13に格納されたGPS受信機5による自車位置および車両方位のデータとを用いて、車両走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正している(ステップS1)。
【0061】
このようなマップマッチング処理の実行中に、進入判定部15bは、駐車場21に車両が進入したか否かを判定する(ステップS2)。ここで、駐車場21への進入が検出されなければ、ステップS1のマップマッチング処理をそのまま続行する。一方、駐車場21への車両の進入が検出されると、仮想道路リンク設定部15cは、地図データメモリ11に格納されている道路リンク情報を含む道路データと、駐車場21の外形情報を含むポリゴンデータとを含んだ地図データを用いて、駐車場21の内部に仮想道路リンク23を設定する(ステップS3)。
【0062】
このとき仮想道路リンク設定部15cは、まず、駐車場21に進入してから所定距離の走行軌跡に沿って入口の仮想道路リンク23cを設定する。その後、駐車場21の外形に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。なお、この場合の走行軌跡情報は、走行軌跡記憶部15aが、所定時間毎あるいは所定走行距離毎に、例えば車両位置・方位計算部14によって自立航法センサ7の出力データから演算された車両の現在位置および走行方位のデータを順次記憶したものである。この走行軌跡情報は、駐車場21に入る前の道路の走行中から継続して取得するようにしても良いし、駐車場21への進入を検出してから取得し始めても良い。
【0063】
仮想道路リンク23が設定されると、マップマッチング処理部15dは、その設定された仮想道路リンク23を利用して、必要に応じて自車位置を仮想道路リンク23上に引き付けるマップマッチング処理を行うことによって自車位置を修正する(ステップS4)。このようなマップマッチング処理を行っている際に、退出判定部15fは、車両が駐車場21から退出したか否かを判定する(ステップS5)。退出していれば、ステップS3で設定した仮想道路リンク23を地図データメモリ11から消去して(ステップS6)、ステップS1に戻る。
【0064】
一方、車両が駐車場21から退出していなければ、外れ位置判定部15eは、駐車場21内に設定されている仮想道路リンク23から自車位置が外れたか否かを判定する(ステップS7)。外れていなければ、ステップS4のマップマッチング処理をそのまま続行する。一方、仮想道路リンク23から自車位置が外れたことが検出された場合には、外れ位置判定部15eは更に、その外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する(ステップS8)。
【0065】
ここで、仮想道路リンク23から自車位置が外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所でない場合には、ステップS4のマップマッチング処理をそのまま続行する。また、所定距離以上離れた場所であった場合には、仮想道路リンク設定部15cは、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直して(ステップS9)、ステップS4のマップマッチング処理に戻る。
【0066】
以上詳しく説明したように、本実施形態によれば、車両が駐車場21に進入したことが検出されたときに、駐車場21の内部に仮想道路リンク23を設定し、当該仮想道路リンク23を利用してマップマッチング処理を行うようにしている。これにより、車両が駐車場21に進入すると、その時点でリアルタイムに駐車場21内に仮想道路リンク23が設定され、設定された仮想道路リンク23に対してマップマッチングによる車両位置の引き付けが必要に応じて行われることとなる。したがって、駐車場21内の通路に道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、駐車場21内における車両の正確な位置を推定することができる。
【0067】
また、本実施形態では、互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所において仮想道路リンク23から自車位置が外れたときに、仮想道路リンク23から外れた後の自車の走行方向に平行および直角な方向から成る格子状の仮想道路リンク23’,23”,23’’’を設定し直すようにしている。これにより、最初に設定した仮想道路リンク23と駐車場21内の実際の通路との間にずれがあっても、仮想道路リンク23を適宜再設定することによって実際の通路に合わせてずれを無くしていくことができる。したがって、駐車場21内における車両の位置をより正確に推定することができる。
【0068】
なお、上記実施形態では、外れ位置判定部15eを設け、仮想道路リンク23から自車位置の外れた場所が互いに隣接する仮想道路リンク23の両方から所定距離以上離れた場所であることを外れ位置判定部15eが検出したときに、仮想道路リンク23を再設定する例について説明したが、本発明はこれに限定されない。例えば、図9に示すように、外れ位置判定部15eの代わりに外れ方向判定部15gを設けても良い。
【0069】
外れ方向判定部15gは、車両の走行方向が、仮想道路リンク設定部15cにより初期設定された元の仮想道路リンク23を構成する格子の一辺の方向から外れたかか否かを判定する。そして、外れ方向判定部15gにより車両の走行方向が元の仮想道路リンク23を構成する格子の一辺の方向から外れたと判定されたときに、仮想道路リンク設定部15cは、元の格子状の仮想道路リンク23bを消して、車両の走行方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す。
【0070】
図10は、外れ方向判定部15gを用いた仮想道路リンク23の再設定に関する例を示す図である。この図10は、駐車場21が複雑な形状をしている場合の例である。図10(a)は、進入判定部15bにより駐車場21への進入が検出されたときに初期設定される仮想道路リンク23を示し、図10(b)は、その後の駐車場21内における車両の走行状態に応じて再設定される仮想道路リンク23’,23”,23’’’を示している。
【0071】
図10(a)に示す例は、任意の場所で車両が右折することによって自車位置が仮想道路リンク23から外れた状態を示している。図10のような複雑な形状の駐車場21では、初期設定された仮想道路リンク23のノードが存在する位置で右折したとしても、図10(a)のように、右折後の車両の進行方向と、格子状の仮想道路リンク23bの方向との間にずれが生じる場合がある。そこで、外れ方向判定部15gでは、自車の走行方向が、元の仮想道路リンク23を構成する格子の一辺と平行でなくなったかどうか、つまり、右折後の車両の進行方向と格子の一辺の方向との間にずれが生じたか否かを判定する。
【0072】
右折後の車両の進行方向と格子の一辺の方向との間のずれが外れ方向判定部15gによって検出されると、仮想道路リンク設定部15cは、図10(b)に示すように、右折した後の自車の走行方向に沿って仮想道路リンク23’を追加するとともに、それと平行な方向に他の仮想道路リンク23”も設定し直す。さらに、これらの仮想道路リンク23’,23”に対して垂直な方向に仮想道路リンク23’’’を再設定する。このとき、元の格子状の仮想道路リンク23bは消去する。
【0073】
なお、外れ方向判定部15gを用いる場合も、車両の進行方向と格子の一辺の方向との間にずれが生じた場合に一律に仮想道路リンク23の再設定を行うのではなく、そのずれ量が所定角度以上の場合にのみ仮想道路リンク23を設定し直すようにすることが好ましい。
【0074】
図11は、外れ方向判定部15gを用いたナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。図11に示すように、外れ方向判定部15gを用いた場合の車両位置修正処理は、図8におけるステップS7,S8の処理をステップS11,S12に置き換えることによって実現することが可能である。
【0075】
ステップS11では、外れ方向判定部15gによって、車両の走行方向が、仮想道路リンク設定部15cにより設定された元の仮想道路リンク23を構成する格子の一辺の方向から外れたか否かを判定する。また、ステップS12では、方向がずれた場合のそのずれ量が所定角度以上か否かを判定する。そして、車両の走行方向が元の仮想道路リンク23を構成する格子の一辺の方向に対して所定角度以上外れていることが検出された場合に、仮想道路リンク設定部15cが格子状の仮想道路リンク23’,23”,23’’’を設定し直す(ステップS9)。
【0076】
なお、図1および図9では、外れ位置判定部15eおよび外れ方向判定部15gの何れか一方のみを用いる例について示しているが、その両方を用いて車両位置修正部15を構成するようにしても良い。
【0077】
また、上記実施形態では、所定以上の幅員または広さを持つ施設エリアの例として駐車場21を挙げたが、これに限定されない。例えば、有料道路の料金所エリアでも良い。図12は、料金所エリアに対する仮想道路リンクの設定例を示す図である。図12において、32は通常の道路リンク、33は広義の仮想道路リンクであり、狭義の仮想道路リンク33a,33bと仮想的なノード33cとを含む。34a,34bは通常のノードである。
【0078】
図12に示すように、料金所エリア31の場合、仮想道路リンク設定部15cは、料金所エリア31の入口に当たる1つのノード34aから一列に並んだ各料金所に当たる複数のノード33cに至るコースの各々に仮想道路リンク33aを設定するとともに、複数のノード33cから料金所エリア31の出口に当たる1つのノード34bに至るコースの各々に仮想道路リンク33bを設定する。
【0079】
また、駐車場21か料金所エリア31かのどちらか一方に対してのみ仮想道路リンクを設定することのほかに、その両方に対して仮想道路リンクを設定するようにしても良い。ただし、駐車場21に対する仮想道路リンクの設定方法と料金所エリア31に対する仮想道路リンクの設定方法とは異なっているので、ポリゴンデータで表される施設エリアが駐車場21か料金所エリア31かを判別し、その結果に応じて仮想道路リンクを設定する必要がある。
【0080】
図13は、駐車場21にも料金所エリア31にも対応可能に構成したナビゲーション装置の構成例を示す図である。図13に示すナビゲーション装置は、車両位置修正部15がエリア判定部15hを更に備えている。エリア判定部15hは、進入判定部15bによって進入が検出された施設エリアが駐車場21か料金所エリア31かを判定する。この判定は、例えばポリゴンデータの付属情報として施設の種類を示す情報を付けておき、それを利用して行うことができる。
【0081】
仮想道路リンク設定部15cは、エリア判定部15hによる判定の結果に応じて仮想道路リンクの設定内容を変える。すなわち、施設エリアが駐車場21の場合は、例えば駐車場21の外形に沿って外枠の仮想道路リンク23aを設定するとともに、その外枠の内部に格子状の仮想道路リンク23bを設定する。また、施設エリアが料金所エリア31の場合は、料金所エリア31の入口に当たる1つのノード34aから一列に並んだ各料金所に当たる複数のノード33cに至るコースの各々と、複数のノード33cから料金所エリア31の出口に当たる1つのノード34bに至るコースの各々とに仮想道路リンク33a,33bを設定するようにする。
【0082】
また、上記実施形態では、施設エリアが地図データにおいてポリゴンデータとして記憶されている例について説明したが、これに限定されない。必ずしもポリゴンとして施設エリアの形状が表されている必要はなく、これ以外の形式で形状や大きさが表されたデータであっても良い。
【0083】
また、上記実施形態では、移動体の例として車両を挙げたが、これに限定されない。例えば、移動体が携帯用のナビゲーション装置を持った人間であっても良い。ただし、移動体が人間の場合、有料道路の料金所エリア31に関する実施形態は適用されない。また、移動体が人間の場合、施設エリアは駐車場21に限らず、内部に通路が存在する施設であれば適用することが可能である。
【0084】
また、上記実施形態では、地図データ中の全ての駐車場に仮想道路リンクを設定する例について説明したが、本発明はこれに限定されない。例えば、一部の大規模駐車場や必要性の高い駐車場(アミューズメントパークなど)については、実際の通路に即した道路リンクを地図データ中にあらかじめ用意しておき、それ以外の駐車場に対して仮想道路リンクを設定するようにしても良い。
【0085】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0086】
本発明は、マップマッチング機能を備えたナビゲーション装置に有用である。車両の走行案内をする車載用ナビゲーション装置に限らず、人間の歩行案内をする携帯用ナビゲーション装置にも有用である。
【図面の簡単な説明】
【0087】
【図1】本実施形態によるナビゲーション装置の構成例を示す図である。
【図2】本実施形態による仮想道路リンクの設定例を示す図である。
【図3】駐車場法に従った本実施形態による仮想道路リンクの設定例を示す図である。
【図4】入口の仮想道路リンクを用いた本実施形態による仮想道路リンクの設定例を示す図である。
【図5】本実施形態による仮想道路リンクの再設定例を示す図である。
【図6】本実施形態による仮想道路リンクの他の再設定例を示す図である。
【図7】本実施形態による仮想道路リンクの他の設定例を示す図である。
【図8】本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れを示すフローチャートである。
【図9】本実施形態によるナビゲーション装置の他の構成例を示す図である。
【図10】本実施形態による仮想道路リンクの再設定に関する他の例を示す図である。
【図11】本実施形態のナビゲーション装置によって行われる車両位置修正処理の全体の流れに関する他の例を示すフローチャートである。
【図12】本実施形態による仮想道路リンクの他の設定例を示す図である。
【図13】本実施形態によるナビゲーション装置の他の構成例を示す図である。
【符号の説明】
【0088】
11 地図データメモリ
15 車両位置修正部
15a 走行軌跡記憶部
15b 進入判定部
15c 仮想道路リンク設定部
15d マップマッチング処理部
15e 外れ位置判定部
15f 退出判定部
15g 外れ方向判定部
15h エリア判定部
【特許請求の範囲】
【請求項1】
道路リンク情報を含む道路データと、所定以上の幅員または広さを持つ施設エリアの外形情報を含む描画データとを含んだ地図データを一時的に格納する地図データメモリと、
上記施設エリアに移動体が進入したか否かを判定する進入判定手段と、
上記進入判定手段により上記施設エリアへの進入が検出されたときに、上記地図データメモリに格納されている地図データを用いて、上記施設エリアの内部に仮想的な道路リンクを設定する仮想道路リンク設定手段と、
上記仮想道路リンク設定手段により設定された仮想道路リンクを利用して、必要に応じて上記移動体の現在位置を上記仮想道路リンク上に引き付けるマップマッチング処理を行うマップマッチング手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記仮想道路リンク設定手段は、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記格子状の仮想道路リンクは、格子の一辺が、上記施設エリアに面した道路を表す道路リンクに直交するように設定されることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
上記仮想道路リンク設定手段は、上記施設エリアの外形によらず、上記施設エリアの中に入る大きさで外形が矩形の格子状の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記矩形の格子状の仮想道路リンクは、上記施設エリアに面した道路を表す道路リンクに直交するように設定されることを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
上記仮想道路リンク設定手段は、上記施設エリアの入口に当たる1つのノードから一列に並んだ複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
上記施設エリアが駐車場か料金所エリアかを判定するエリア判定手段を備え、
上記仮想道路リンク設定手段は、上記エリア判定手段による判定の結果に応じて上記仮想道路リンクの設定内容を変えることを特徴とする請求項1に記載のナビゲーション装置。
【請求項8】
上記仮想道路リンク設定手段により設定された仮想道路リンクから上記移動体の現在位置が外れたか否か、外れた場合にはその外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する外れ位置判定手段を備え、
上記外れ位置判定手段により上記互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所で上記移動体の現在位置が上記仮想道路リンクから外れたと判定されたときに、上記仮想道路リンク設定手段は、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すことを特徴とする請求項1に記載のナビゲーション装置。
【請求項9】
上記仮想道路リンクから外れた後の上記移動体の移動方向が元の仮想道路リンクを構成する格子の一辺と平行でないときは、元の格子状の仮想道路リンクを消して、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定することを特徴とする請求項8に記載のナビゲーション装置。
【請求項10】
上記移動体の移動方向が、上記仮想道路リンク設定手段により設定された仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたか否かを判定する外れ方向判定手段を備え、
上記外れ方向判定手段により上記移動体の移動方向が上記仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたと判定されたときに、上記仮想道路リンク設定手段は、外れる前の元の格子状の仮想道路リンクを消して、上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すことを特徴とする請求項1に記載のナビゲーション装置。
【請求項11】
上記進入判定手段により上記施設エリアへの進入が検出されたときに、上記仮想道路リンク設定手段は、進入してから所定距離の移動軌跡に沿って進入口の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項12】
上記進入口の仮想道路リンクを進入時とは逆方向に上記移動体の現在位置が移動したか否かを検出して上記施設エリアからの退出を判定する退出判定手段を備え、
上記退出判定手段により上記施設エリアからの退出が検出されたときに、上記マップマッチング手段は、自立航法および衛星航法を用いたマップマッチング処理を行うことを特徴とする請求項11に記載のナビゲーション装置。
【請求項13】
上記施設エリアは、上記地図データにおいてポリゴンデータとして記憶されているものであることを特徴とする請求項1に記載のナビゲーション装置。
【請求項14】
所定以上の幅員または広さを持つ施設エリアに移動体が進入したか否かを判定する第1のステップと、
上記第1のステップで上記施設エリアへの進入が検出されたときに、道路リンク情報を含む道路データと上記施設エリアの外形情報を含む描画データとを含んだ地図データを用いて、上記施設エリアの内部に仮想的な道路リンクを設定する第2のステップと、
上記第2のステップで設定された仮想道路リンクを利用して、必要に応じて上記移動体の現在位置を上記仮想道路リンク上に引き付けるマップマッチング処理を行うことによって上記移動体の現在位置を修正する第3のステップとを有することを特徴とする移動体位置修正方法。
【請求項15】
上記第2のステップでは、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項16】
上記第2のステップでは、上記施設エリアの入口に当たる1つのノードから一列に並んだ複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項17】
上記第2のステップは、上記施設エリアが駐車場か料金所エリアかを判定するステップと、
上記エリア判定手段による判定の結果に応じて上記仮想道路リンクの設定内容を変え、上記施設エリアが上記駐車場の場合は、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定するように成し、上記施設エリアが上記料金所エリアの場合は、上記施設エリアの入口に当たる1つのノードから一列に並んだ各料金所に当たる複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定するように成すことを特徴とする請求項14に記載の移動体位置修正方法。
【請求項18】
上記第2のステップで設定された仮想道路リンクから上記移動体の現在位置が外れたときに、その外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する第4のステップと、
上記互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所で上記移動体の現在位置が上記仮想道路リンクから外れたと判定されたときに、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す第5のステップとを有することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項19】
上記移動体の移動方向が、上記第2のステップで設定された仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたか否かを判定する第4のステップと、
上記移動体の移動方向が上記仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたと判定されたときに、上記仮想道路リンク設定手段は、外れる前の元の格子状の仮想道路リンクを消して、上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す第5のステップとを有することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項20】
上記第1のステップで上記施設エリアへの進入が検出されたときに、上記第2のステップでは、進入してから所定距離の移動軌跡に沿って進入口の仮想道路リンクを設定し、
上記進入口の仮想道路リンクを進入時とは逆方向に上記移動体の現在位置が移動したか否かを検出して上記施設エリアからの退出を判定する第6のステップを更に有することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項1】
道路リンク情報を含む道路データと、所定以上の幅員または広さを持つ施設エリアの外形情報を含む描画データとを含んだ地図データを一時的に格納する地図データメモリと、
上記施設エリアに移動体が進入したか否かを判定する進入判定手段と、
上記進入判定手段により上記施設エリアへの進入が検出されたときに、上記地図データメモリに格納されている地図データを用いて、上記施設エリアの内部に仮想的な道路リンクを設定する仮想道路リンク設定手段と、
上記仮想道路リンク設定手段により設定された仮想道路リンクを利用して、必要に応じて上記移動体の現在位置を上記仮想道路リンク上に引き付けるマップマッチング処理を行うマップマッチング手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記仮想道路リンク設定手段は、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記格子状の仮想道路リンクは、格子の一辺が、上記施設エリアに面した道路を表す道路リンクに直交するように設定されることを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
上記仮想道路リンク設定手段は、上記施設エリアの外形によらず、上記施設エリアの中に入る大きさで外形が矩形の格子状の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記矩形の格子状の仮想道路リンクは、上記施設エリアに面した道路を表す道路リンクに直交するように設定されることを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
上記仮想道路リンク設定手段は、上記施設エリアの入口に当たる1つのノードから一列に並んだ複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
上記施設エリアが駐車場か料金所エリアかを判定するエリア判定手段を備え、
上記仮想道路リンク設定手段は、上記エリア判定手段による判定の結果に応じて上記仮想道路リンクの設定内容を変えることを特徴とする請求項1に記載のナビゲーション装置。
【請求項8】
上記仮想道路リンク設定手段により設定された仮想道路リンクから上記移動体の現在位置が外れたか否か、外れた場合にはその外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する外れ位置判定手段を備え、
上記外れ位置判定手段により上記互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所で上記移動体の現在位置が上記仮想道路リンクから外れたと判定されたときに、上記仮想道路リンク設定手段は、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すことを特徴とする請求項1に記載のナビゲーション装置。
【請求項9】
上記仮想道路リンクから外れた後の上記移動体の移動方向が元の仮想道路リンクを構成する格子の一辺と平行でないときは、元の格子状の仮想道路リンクを消して、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定することを特徴とする請求項8に記載のナビゲーション装置。
【請求項10】
上記移動体の移動方向が、上記仮想道路リンク設定手段により設定された仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたか否かを判定する外れ方向判定手段を備え、
上記外れ方向判定手段により上記移動体の移動方向が上記仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたと判定されたときに、上記仮想道路リンク設定手段は、外れる前の元の格子状の仮想道路リンクを消して、上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直すことを特徴とする請求項1に記載のナビゲーション装置。
【請求項11】
上記進入判定手段により上記施設エリアへの進入が検出されたときに、上記仮想道路リンク設定手段は、進入してから所定距離の移動軌跡に沿って進入口の仮想道路リンクを設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項12】
上記進入口の仮想道路リンクを進入時とは逆方向に上記移動体の現在位置が移動したか否かを検出して上記施設エリアからの退出を判定する退出判定手段を備え、
上記退出判定手段により上記施設エリアからの退出が検出されたときに、上記マップマッチング手段は、自立航法および衛星航法を用いたマップマッチング処理を行うことを特徴とする請求項11に記載のナビゲーション装置。
【請求項13】
上記施設エリアは、上記地図データにおいてポリゴンデータとして記憶されているものであることを特徴とする請求項1に記載のナビゲーション装置。
【請求項14】
所定以上の幅員または広さを持つ施設エリアに移動体が進入したか否かを判定する第1のステップと、
上記第1のステップで上記施設エリアへの進入が検出されたときに、道路リンク情報を含む道路データと上記施設エリアの外形情報を含む描画データとを含んだ地図データを用いて、上記施設エリアの内部に仮想的な道路リンクを設定する第2のステップと、
上記第2のステップで設定された仮想道路リンクを利用して、必要に応じて上記移動体の現在位置を上記仮想道路リンク上に引き付けるマップマッチング処理を行うことによって上記移動体の現在位置を修正する第3のステップとを有することを特徴とする移動体位置修正方法。
【請求項15】
上記第2のステップでは、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項16】
上記第2のステップでは、上記施設エリアの入口に当たる1つのノードから一列に並んだ複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項17】
上記第2のステップは、上記施設エリアが駐車場か料金所エリアかを判定するステップと、
上記エリア判定手段による判定の結果に応じて上記仮想道路リンクの設定内容を変え、上記施設エリアが上記駐車場の場合は、上記施設エリアの外形に沿って外枠の仮想道路リンクを設定するとともに、その外枠の内部に格子状の仮想道路リンクを設定するように成し、上記施設エリアが上記料金所エリアの場合は、上記施設エリアの入口に当たる1つのノードから一列に並んだ各料金所に当たる複数のノードに至るコースの各々と、上記複数のノードから上記施設エリアの出口に当たる1つのノードに至るコースの各々とに仮想道路リンクを設定するように成すことを特徴とする請求項14に記載の移動体位置修正方法。
【請求項18】
上記第2のステップで設定された仮想道路リンクから上記移動体の現在位置が外れたときに、その外れた場所が、互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所であるかどうかを判定する第4のステップと、
上記互いに隣接する仮想道路リンクの両方から所定距離以上離れた場所で上記移動体の現在位置が上記仮想道路リンクから外れたと判定されたときに、上記仮想道路リンクから外れた後の上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す第5のステップとを有することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項19】
上記移動体の移動方向が、上記第2のステップで設定された仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたか否かを判定する第4のステップと、
上記移動体の移動方向が上記仮想道路リンクを構成する格子の一辺の方向に対して所定角度以上外れたと判定されたときに、上記仮想道路リンク設定手段は、外れる前の元の格子状の仮想道路リンクを消して、上記移動体の移動方向に平行および直角な方向から成る格子状の仮想道路リンクを設定し直す第5のステップとを有することを特徴とする請求項14に記載の移動体位置修正方法。
【請求項20】
上記第1のステップで上記施設エリアへの進入が検出されたときに、上記第2のステップでは、進入してから所定距離の移動軌跡に沿って進入口の仮想道路リンクを設定し、
上記進入口の仮想道路リンクを進入時とは逆方向に上記移動体の現在位置が移動したか否かを検出して上記施設エリアからの退出を判定する第6のステップを更に有することを特徴とする請求項14に記載の移動体位置修正方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−250875(P2006−250875A)
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願番号】特願2005−71140(P2005−71140)
【出願日】平成17年3月14日(2005.3.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願日】平成17年3月14日(2005.3.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]