
ナビゲーション装置および車両位置更新方法
【課題】実際の道路と異なる道路上への車両位置の誤補正を極力防止することができる「ナビゲーション装置および車両位置更新方法」を提供する。
【解決手段】既存候補道路に加え新規候補道路が検出された場合に、既存候補道路の今回と前回のGPS距離の差が基準距離以下のとき、GPS距離が短いほど高い評価値を算出する評価式に、各候補道路の今回のGPS距離を代入して各候補道路の評価値を算出し、当該差が基準距離以下のときは、既存候補道路の評価値について、既存候補道路の今回のGPS距離ではなく既存候補道路GPS距離差を評価式に代入して算出する評価値算出部230と、最高の評価値である候補道路上に車両位置を更新する車両位置更新部240とを設け、車両が既存候補道路を新規候補道路に進入せず走行した場合、既存候補道路の評価値を小さくし、既存候補道路上に車両位置が更新され易くなるようにしている。
【解決手段】既存候補道路に加え新規候補道路が検出された場合に、既存候補道路の今回と前回のGPS距離の差が基準距離以下のとき、GPS距離が短いほど高い評価値を算出する評価式に、各候補道路の今回のGPS距離を代入して各候補道路の評価値を算出し、当該差が基準距離以下のときは、既存候補道路の評価値について、既存候補道路の今回のGPS距離ではなく既存候補道路GPS距離差を評価式に代入して算出する評価値算出部230と、最高の評価値である候補道路上に車両位置を更新する車両位置更新部240とを設け、車両が既存候補道路を新規候補道路に進入せず走行した場合、既存候補道路の評価値を小さくし、既存候補道路上に車両位置が更新され易くなるようにしている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置および車両位置更新方法に関し、特に、車両位置を示す車両位置マークを地図上に表示するナビゲーション装置および車両位置更新方法に関するものである。
【背景技術】
【0002】
一般に、カーナビゲーション装置における車両位置は、GPS(Global Positioning System)、自律航法センサを利用する自律航法技術、マップマッチング技術などによって特定される(例えば、特許文献1参照)。マップマッチング技術の一つに投影法がある。投影法は、GPSや自律航法技術により測定された測定位置から所定の条件下で投影し得る道路上のポイントを探し、当該ポイントへの車両位置の補正を試みる方法である。
【0003】
なお、特許文献1に記載の現在位置算出装置は、車両位置の補正候補である候補点を信頼度とともに算出し、信頼度の最も高い候補点に車両位置を更新する。また、信頼度が最も高い候補点以外の候補点のうち信頼度がある程度高い候補点については更に新たな候補点を算出すべく保存する一方、信頼度がある程度低い候補点については保存せずに削除するというものである。
【特許文献1】特開平08−334346号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
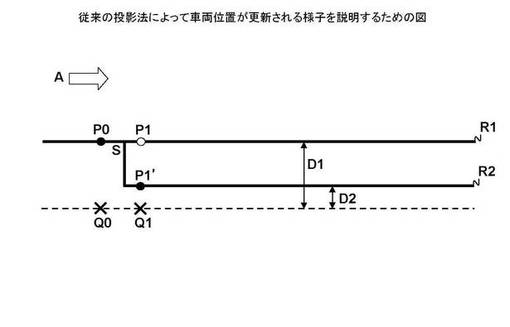
しかしながら、従来の投影法を適用する場合に、実際に車両が存在する道路と異なる道路上に車両位置を補正してしまうという問題が生じ得る。図6は、従来の投影法によって車両位置が更新される様子を説明するための図である。従来の投影法によれば、例えば、図6に示すように、時刻T0に、道路R1上のP0点を矢印A方向に走行している車両の時刻T0におけるGPSによる測定位置が道路外のQ0点であった場合、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正される。しかしながら、時刻T1に、道路R1上のP1点に移動した車両のGPSによる測定位置が道路外のQ1点となった場合、車両位置は、Q1点から道路R1上のP1点へと正しく補正されずに道路R2上のP1’点に補正されてしまう。Q1点から道路R2までの距離D2がQ1点から道路R1までの距離D1よりも短いからである。なお、道路R2は、前回の測定時(時刻T0)において車両が実際に走行していた道路(道路R1)上の車両の実際の位置(P0点)と今回の測定時(時刻T1)において車両が実際に走行している道路(道路R1)上の車両の実際の位置(P1点)との間のある位置(S点)を分岐点として、車両が実際に走行している道路(道路R1)から今回の測定時(時刻T1)における測定位置(Q1点)に近い側に分岐している道路である。
【0005】
本発明は、このような問題を解決するために成されたものである。すなわち、実際に車両が位置する道路と異なる道路上への車両位置の誤補正を極力防止することを目的とする。具体的には、車両が走行している道路上の前回の測定時における車両の実際の位置と今回の測定時における車両の実際の位置との間のある位置を分岐点として車両が走行している道路から今回の測定時の測定位置に近い側に分岐する他の道路上への車両位置の誤補正を極力防止することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決するために、本発明では、GPSを用いて都度測定される車両の測定位置であるGPS位置と車両位置を更新すべき候補である候補道路との距離を候補道路に係るGPS距離として都度算出しておく。そして、前回検出した既存候補道路に加えて前回未検出であった新規候補道路を今回検出した場合であって、かつ、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差が基準距離以下でないと判定した場合には、GPS距離を変数として含む式であってGPS距離が短ければ短いほど高い評価値を算出する評価式に、既存候補道路に係る今回のGPS距離を代入して既存候補道路に係る評価値を算出するとともに、評価式に新規候補道路に係る今回のGPS距離を代入して新規候補道路に係る評価値を算出し、評価値が最も高い候補道路上に車両位置を更新するようにしている。一方、前回検出した既存候補道路に加えて前回未検出であった新規候補道路を今回検出した場合であるが、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差が基準距離以下であると判定した場合には、評価式に既存候補道路に係る今回のGPS距離に代えて既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差を代入して既存候補道路に係る評価値を算出するとともに、評価式に新規候補道路に係る今回のGPS距離を代入して新規候補道路に係る評価値を算出し、評価値が最も高い候補道路上に車両位置を更新するようにしている。
【発明の効果】
【0007】
上記のように構成した本発明によれば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合、前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差であって車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される差よりも大きな値を基準距離としておけば、当該差は基準距離以下となる。従って、評価式に既存候補道路に係る今回のGPS距離に代えて前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差を代入して既存候補道路に係る評価値を算出することになる。また、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合、既存候補道路に係る今回のGPS距離に代えて評価式に代入する前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差は、新規候補道路に係る今回のGPS距離よりも小さくなり易い。車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合の当該差は、通常、極めて小さな値となり易いからである。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る評価値は新規候補道路に係る評価値よりも高くなり易くなるため、新規候補道路ではなく既存候補道路上に車両位置が更新され易くなる。すなわち、実際に車両が位置する既存候補道路と異なる新規候補道路上への車両位置の誤補正を極力防止することができるようになる。
【発明を実施するための最良の形態】
【0008】
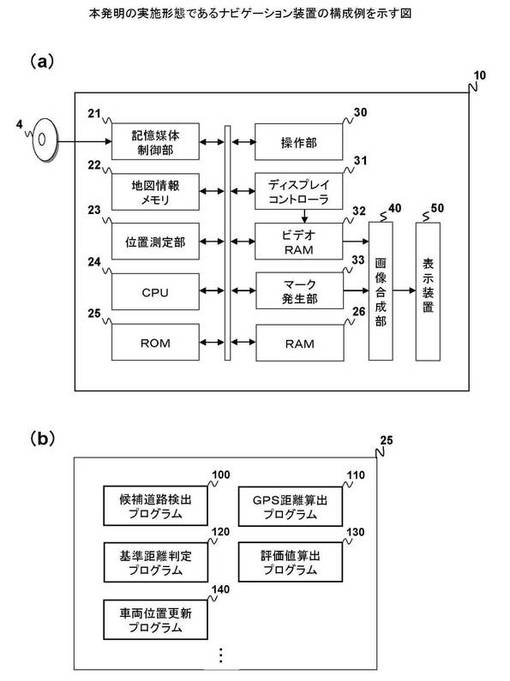
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本発明の実施形態であるナビゲーション装置10の構成例を示す図である。ナビゲーション装置10は、図1(a)に示すように、記憶媒体制御部21、地図情報メモリ22、位置測定部23、CPU24(プロセッサ)、ROM25、RAM26、操作部30、ディスプレイコントローラ31、ビデオRAM32、マーク発生部33、画像合成部40、表示装置50を備えて構成される。
【0009】
記憶媒体制御部21は、DVD−ROM4などの記憶媒体の読み取りを制御する。DVD−ROM4は、地図表示、経路探索等に必要な各種の地図データを記憶している。記憶媒体制御部21は、DVD−ROM4から読み出した地図データを地図情報メモリ22に一時的に記憶する。
【0010】
位置測定部23は、自律航法センサ、GPS受信機、位置計算用CPU等で構成され、車両の現在位置を測定する。自律航法センサは、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する車速センサ(距離センサ)と、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)とを含んでいる。自律航法センサは、これらの車速センサおよび角速度センサによって車両の相対位置および方位を検出する。
【0011】
位置計算用CPUは、自律航法センサから出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車の車両位置(推定車両位置)および車両方位を計算する。また、GPS受信機は、複数のGPS衛星から送られてくる電波をGPSアンテナで受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車の車両位置と1サンプリング時間ΔT前の自車の車両位置とに基づいて計算する)。なお、位置測定部23は、測定した車両の現在位置をCPU24に供給する他、車両の走行軌跡としてRAM26に記憶する。なお、RAM26は、車両の走行軌跡の他、各種処理の過程で得られるデータや各種処理の結果得られるデータも一時的に記憶する。
【0012】
CPU24は、ナビゲーション装置10を制御する。CPU24は、例えば、本発明の候補道路検出部、本発明のGPS距離算出部、本発明の基準距離判定部、本発明の評価値算出部、および、本発明の車両位置更新部として機能する。なお、本発明の候補道路検出部、GPS距離算出部、基準距離判定部、評価値算出部および車両位置更新部の動作の詳細については後述する。
【0013】
ROM25は、各種プログラムを記憶する。例えば、ROM25は、図1(b)に示すように、CPU24を本発明の候補道路検出部として機能させる候補道路検出プログラム100、CPU24を本発明のGPS距離算出部として機能させるGPS距離算出プログラム110、CPU24を本発明の基準距離判定部として機能させる基準距離判定プログラム120、CPU24を本発明の評価値算出部として機能させる評価値算出プログラム130、CPU24を本発明の車両位置更新部として機能させる車両位置更新プログラム140などを記憶する。
【0014】
操作部30は、リモコン、タッチパネル、ジョイステックなどから構成される。利用者は、操作部30を介して、ナビゲーション装置10に対する各種の設定/操作を行う。ディスプレイコントローラ31は、地図情報メモリ22に格納された地図データに基づいて、表示装置50への表示に必要な地図画像データを生成する。ビデオRAM32は、ディスプレイコントローラ31によって生成された地図画像データを一時的に記憶する。すなわち、ディスプレイコントローラ31によって生成された地図画像データはビデオRAM32に一時的に記憶され、1画面分の地図画像データが読み出されて画像合成部40に出力される。
【0015】
マーク発生部33は、自車の車両位置に表示する車両位置マークや、ガソリンスタンドやコンビニエンスストア等を表示する各種ランドマーク等を発生して出力する。画像合成部40は、各種画像を合成して出力する。具体的には、ビデオRAM32から出力された地図画像データに対して、マーク発生部33から出力される各画像データを重ねて画像合成を行い、合成した画像データを表示装置50に出力する。
【0016】
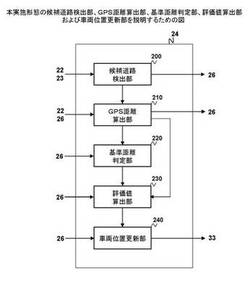
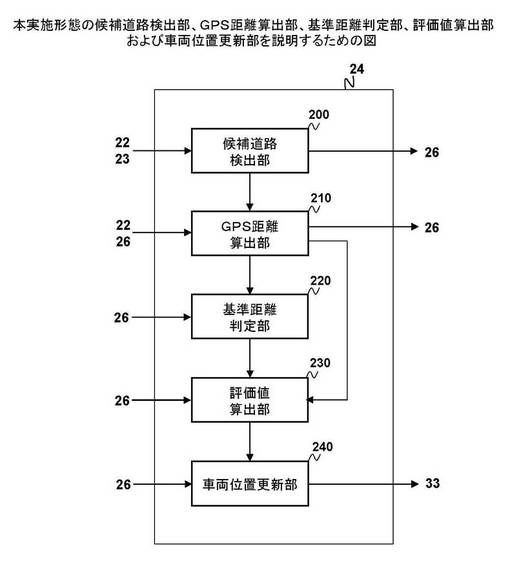
以下、本発明の候補道路検出部として機能として機能するCPU24(以下、単に「候補道路検出部200」という)、本発明のGPS距離算出部として機能するCPU24(以下、単に「GPS距離算出部210」という)、本発明の基準距離判定部として機能するCPU24(以下、単に「基準距離判定部220」という)、本発明の評価値算出部として機能するCPU24(以下、単に「評価値算出部230」という)、および、本発明の車両位置更新部として機能するCPU24(以下、単に「車両位置更新部240」という)の動作の詳細を説明する。図2は、本実施形態の候補道路検出部200、GPS距離算出部210、基準距離判定部220、評価値算出部230および車両位置更新部240を説明するための図である。
【0017】
図2に示すように、候補道路検出部200は、所定のタイミング(以下、「基準タイミング」という)毎に、GPS受信機による車両位置および車両方位のデータ(以下、「GPS位置」という)を車両の測定位置として位置測定部23から取得する。候補道路検出部200は、位置測定部23から車両の測定位置を取得した場合、位置測定部23から取得したGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、車両位置を更新すべき候補である道路(以下、「候補道路」という)を検出する。候補道路検出部200は、候補道路を検出した場合、位置測定部23から取得したGPS位置、および、検出した候補道路(候補道路を特定する情報)をRAM26に記憶するとともに、GPS位置と候補道路との距離(以下、「GPS距離」という)を算出すべき旨の通知(以下、「GPS距離算出通知」という)をGPS距離算出部210に供給する。
【0018】
GPS距離算出部210は、基準タイミング毎に、GPS距離算出通知を候補道路検出部200から取得する。GPS距離算出部210は、GPS距離算出通知を候補道路検出部200から取得した場合、地図情報メモリ22に記憶された地図データ、RAM26に記憶されているGPS位置および候補道路を参照し、GPS距離を算出する。GPS距離算出部210は、GPS距離を算出した場合、算出したGPS距離をGPS位置に対応付けてRAM26に記憶する。
【0019】
また、GPS距離算出部210は、GPS距離算出通知を候補道路検出部200から取得した場合、候補道路検出部200が前回検出(前回の基準タイミングにて検出)した候補道路(以下「既存候補道路」という)に加え前回未検出の候補道路(以下、「新規候補道路」という)を今回検出(今回の基準タイミングにて検出)したか否か、つまり、RAM26に既存候補道路に加え新規候補道路が記憶されているか否かを判断する。GPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を今回検出したと判断した場合、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差(以下、「既存候補道路GPS距離差」という)と、基準距離とを比較すべき旨の通知(以下、「基準距離判定通知」という)を基準距離判定部220に供給する。なお、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値を設定する。
【0020】
一方、GPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を今回検出していないと判断した場合、候補道路の評価値を算出すべき旨の通知(以下、「評価値算出指示通知」という)を評価値算出部230に供給する。
【0021】
基準距離判定部220は、既存候補道路に加え新規候補道路がGPS距離算出部210により検出された場合、基準距離判定通知をGPS距離算出部210から取得する。基準距離判定部220は、基準距離判定通知をGPS距離算出部210から取得した場合、RAM26に記憶されている既存候補道路に係る前回のGPS距離と今回のGPS距離とを参照し、既存候補道路GPS距離差を算出する。基準距離判定部220は、既存候補道路GPS距離差を算出した場合、算出した既存候補道路GPS距離差と基準距離とを比較する。基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下でないと判定した場合、評価値算出指示通知を評価値算出部230に供給する。一方、基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下であると判定した場合、評価値算出指示通知とともに当該既存候補道路GPS距離差を評価値算出部230に供給する。
【0022】
評価値算出部230は、基準タイミング毎に、評価値算出指示通知をGPS距離算出部210または基準距離判定部220から取得する。具体的には、評価値算出部230は、既存候補道路に加え新規候補道路が検出されていない場合、評価値算出指示通知をGPS距離算出部210から取得する。また、基準距離判定部220は、既存候補道路に加え新規候補道路が検出された場合であって、かつ、既存候補道路GPS距離差が基準距離以下でない場合、評価値算出指示通知を基準距離判定部220から取得する。また、基準距離判定部220は、既存候補道路に加え新規候補道路が検出された場合であって、かつ、既存候補道路GPS距離差が基準距離以下である場合、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得する。
【0023】
評価値算出部230は、評価値算出指示通知のみをGPS距離算出部210から取得した場合(既存候補道路に加え新規候補道路が検出されていない場合)、GPS距離を変数として含む式であってGPS距離が短ければ短いほど高い評価値を算出する評価式に、RAM26に記憶されている既存候補道路に係る今回のGPS距離を代入し既存候補道路に係る評価値を算出する。
【0024】
評価値算出部230は、評価値算出指示通知のみを基準距離判定部220から取得した場合(既存候補道路に加え新規候補道路が検出された場合であってかつ既存候補道路GPS距離差が基準距離以下でない場合)、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する。
【0025】
評価値算出部230は、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した場合(既存候補道路に加え新規候補道路が検出された場合であってかつ既存候補道路GPS距離差が基準距離以下である場合)、RAM26に記憶されている既存候補道路に係る今回のGPS距離に代えて、基準距離判定部220から取得した既存候補道路GPS距離差を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する。
【0026】
評価値算出部230は、候補道路(既存候補道路/既存候補道路および新規候補道路)に係る評価値を算出した場合、最も高い評価値である候補道路を特定する。評価値算出部230は、最も高い評価値である候補道路を特定した場合、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0027】
車両位置更新部240は、最も高い評価値である候補道路を評価値算出部230から取得する。車両位置更新部240は、最も高い評価値である候補道路を評価値算出部230から取得した場合、価値算出部230から取得した当該候補道路とRAM26に記憶されているGPS位置とを参照し、当該候補道路上に車両位置を更新する。車両位置更新部240は、車両位置を更新した場合、更新後の車両位置をマーク発生部33に供給する。なお、マーク発生部33は、更新後の車両位置に車両位置マークを発生し画像合成部40に供給し、画像合成部40によって当該車両位置マークが表示装置50に出力される。
【0028】
以下、ナビゲーション装置10の動作について説明する。図3は、図1に示すナビゲーション装置10の動作例を示すフローチャートである。図3に示すフローチャートは、ナビゲーション装置10の起動(例えば電源オン)により開始する。
【0029】
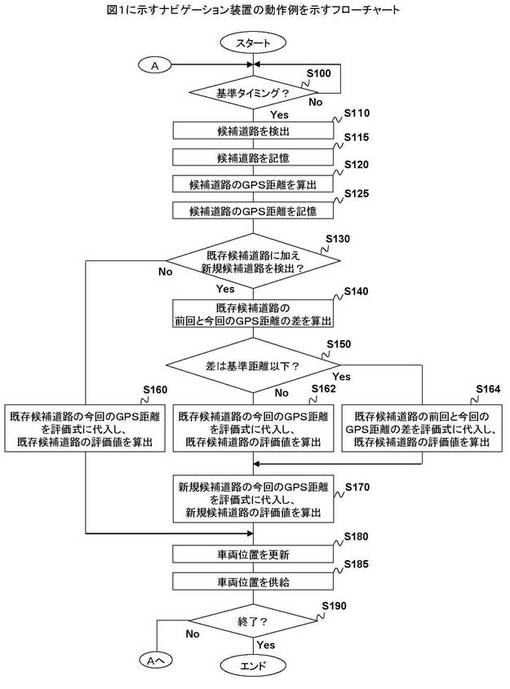
図3において、候補位置特定部210は、基準タイミングになったか否かを判断する(ステップS100)。基準タイミングになっていないと候補位置特定部210にて判断した場合(ステップS100:No)、候補位置特定部210は、基準タイミングになるまで同処理を繰り返す。一方、基準タイミングになったと候補位置特定部210にて判断した場合(ステップS100:Yes)、候補位置特定部210は、GPS位置を車両の測定位置として位置測定部23から取得する。GPS位置を取得した候補道路検出部200は、位置測定部23から取得したGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、候補道路を検出する(ステップS110)。候補道路検出部200は、候補道路を検出した場合、位置測定部23から取得したGPS位置、および、検出した候補道路をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0030】
GPS距離算出通知を候補道路検出部200から取得したGPS距離算出部210は、地図情報メモリ22に記憶された地図データ、RAM26に記憶されているGPS位置および候補道路を参照し、GPS距離を算出する(ステップS120)。GPS距離算出部210は、GPS距離を算出した場合、算出したGPS距離をGPS位置に対応付けてRAM26に記憶する(ステップS125)。GPS距離をGPS位置に対応付けてRAM26に記憶したGPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を検出したか否かを判断する(ステップS130)。候補道路検出部200が既存候補道路に加え新規候補道路を検出したとGPS距離算出部210にて判断した場合(ステップS130:Yes)、GPS距離算出部210は、基準距離判定通知を基準距離判定部220に供給する。一方、候補道路検出部200が既存候補道路に加え新規候補道路を検出していないとGPS距離算出部210にて判断した場合(ステップS130:No)、GPS距離算出部210は、評価値算出指示通知を評価値算出部230に供給する。
【0031】
ステップS130(Yes)に続いて、基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、RAM26に記憶されている既存候補道路に係る前回のGPS距離と今回のGPS距離とを参照し、既存候補道路GPS距離差を算出する(ステップS140)。既存候補道路GPS距離差を算出した基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下であるか否かを判定する(ステップS150)。算出した既存候補道路GPS距離差が基準距離以下でないと基準距離判定部220にて判定した場合(ステップS150:No)、基準距離判定部220は、評価値算出指示通知を評価値算出部230に供給する。一方、算出した既存候補道路GPS距離差が基準距離以下であると基準距離判定部220にて判定した場合(ステップS150:Yes)、基準距離判定部220は、評価値算出指示通知とともに当該既存候補道路GPS距離差を評価値算出部230に供給する。
【0032】
ステップS130(No)に続いて、評価値算出指示通知をGPS距離算出部210から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出する(ステップS160)。候補道路(既存候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路)を特定し、特定した最も高い評価値である候補道路(既存候補道路)を車両位置更新部240に供給する。
【0033】
ステップS150(No)に続いて、評価値算出指示通知のみを基準距離判定部220から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出するとともに(ステップS162)、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する(ステップS170)。候補道路(既存候補道路および新規候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路または新規候補道路)を特定し、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0034】
ステップS150(Yes)に続いて、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離に代えて基準距離判定部220から取得した既存候補道路GPS距離差を評価式に代入し既存候補道路に係る評価値を算出するとともに(ステップS164)、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する(ステップS170)。候補道路(既存候補道路および新規候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路または新規候補道路)を特定し、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0035】
ステップS160またはステップS170に続いて、最も高い評価値である候補道路を評価値算出部230から取得した車両位置更新部240は、価値算出部230から取得した最も高い評価値である候補道路とRAM26に記憶されているGPS位置とを参照し、最も高い評価値である候補道路上に車両位置を更新する(ステップS180)。最も高い評価値である候補道路上に車両位置を更新した車両位置更新部240は、更新後の車両位置をマーク発生部33に供給する(ステップS185)。
【0036】
次に、非図示の終了判断部は、処理を終了するか否かを判断する(ステップS190)。処理を終了すると終了判断部にて判断した場合(ステップS190:Yes)、本フローチャートは終了する。一方、処理を終了しないと終了判断部にて判断した場合(ステップS190:No)、ステップS100に戻る。なお、終了判断部は、例えば、ナビゲーション装置10の電源がオフされた場合などに処理を終了すると判断する。
【0037】
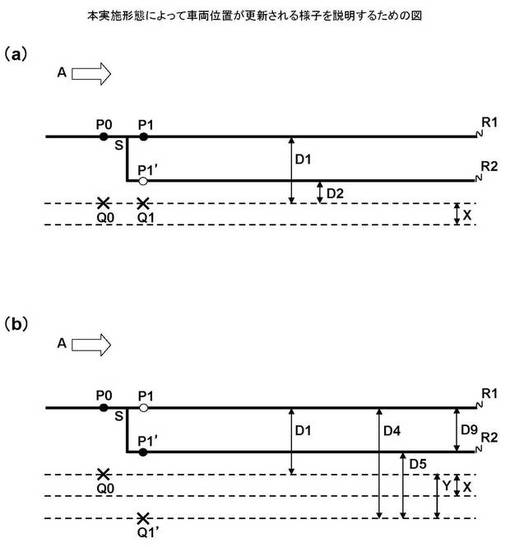
以下、図3に示すフローチャートを補足説明する。図4は、本実施形態によって車両位置が更新される様子を説明するための図である。例えば、図4(a)に示すように、時刻T0に、道路R1上のP0点を矢印A方向に走行している車両のGPSによる測定位置が道路外のQ0点であった場合(候補位置特定部210がGPS位置Q0を位置測定部23から取得した場合)、候補道路検出部200は、候補道路(道路R1)を検出し(ステップS110)、GPS位置、および、候補道路(道路R1)をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0038】
GPS距離算出部210は、候補道路(道路R1)のGPS距離D1を算出し(ステップS120)、RAM26に記憶する(ステップS125)。GPS距離算出部210は、既存候補道路(道路R1)に加え新規候補道路を検出していないと判断し(ステップS130:No)、評価値算出指示通知を評価値算出部230に供給する。評価値算出部230は、既存候補道路(道路R1)のGPS距離を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS160)。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給する。車両位置更新部240は、最も高い評価値である既存候補道路(道路R1)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正される。
【0039】
続いて、時刻T1に、道路R1上のP1点に移動した車両のGPSによる測定位置が道路外のQ1点となった場合(候補位置特定部210がGPS位置Q1を位置測定部23から取得した場合)、候補道路検出部200は、候補道路(道路R1および道路R2)を検出し(ステップS110)、GPS位置、および、候補道路(道路R1および道路R2)をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0040】
GPS距離算出部210は、候補道路(道路R1)のGPS距離D1、および、候補道路(道路R2)のGPS距離D2を算出し(ステップS120)、RAM26に記憶する(ステップS125)。GPS距離算出部210は、既存候補道路(道路R1)に加え新規候補道路(道路R2)を検出したと判断し(ステップS130:Yes)、基準距離判定通知を基準距離判定部220に供給する。基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出する(ステップS140)。基準距離判定部220は、道路R1の既存候補道路GPS距離差「0」が基準距離X以下であると判定し(ステップS150:Yes)、評価値算出指示通知とともに道路R1の既存候補道路GPS距離差「0」を評価値算出部230に供給する。なお、基準距離Xは、車両が既存候補道路(道路R1)上の分岐点Sにて新規候補道路(R2)に進入せず既存候補道路(道路R1)をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値である。
【0041】
評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて道路R1の既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS164)。また、評価値算出部230は、新規候補道路(道路R2)のGPS距離D2を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する(ステップS170)。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給する。車両位置更新部240は、最も高い評価値である既存候補道路(道路R1)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正される(道路R2上のP1’点に補正されない)。
【0042】
以上、本実施形態のナビゲーション装置10によれば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値を基準距離としておけば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路GPS距離差は基準距離以下となる。従って、既存候補道路に係る今回のGPS距離に代えて既存候補道路GPS距離差を評価式に代入して既存候補道路に係る評価値を算出することになる。また、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る今回のGPS距離に代えて評価式に代入する既存候補道路GPS距離差は、新規候補道路に係る今回のGPS距離よりも小さくなり易い。車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合の既存候補道路GPS距離差は、通常、極めて小さな値となり易いからである。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る評価値は新規候補道路に係る評価値よりも高くなり易くなるため、新規候補道路ではなく既存候補道路上に車両位置が更新され易くなる。すなわち、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止することができるようになる。
【0043】
なお、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であると説明したが、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であって、かつ、車両が既存候補道路上の分岐点にて新規候補道路に進入し新規候補道路を走行するような場合に想定される既存候補道路GPS距離差よりも小さな値である方が好ましい。車両位置を新規候補道路上に更新すべきときに、誤って既存候補道路上に更新されてしまうこと極力防止するためである。
【0044】
基準距離を、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であって、かつ、車両が既存候補道路上の分岐点にて新規候補道路に進入し新規候補道路を走行するような場合に想定される既存候補道路GPS距離差よりも小さな値に設定した場合の動作を図4(b)により説明する。図4(b)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R2上のP1’点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1’点となった場合、基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D4と差「Y」)が基準距離X以下でないと判定するようになる(ステップS150:No)。なお、既存候補道路GPS距離差Yは、既存候補道路(道路R1)と新規候補道路(道路R2)との距離D9に概ね等しくなる。
【0045】
この場合、評価値算出部230は、既存候補道路(道路R1)のGPS距離D4を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS162)。また、評価値算出部230は、新規候補道路(道路R2)のGPS距離D5を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する(ステップS170)。これにより、車両位置更新部240は、最も高い評価値である新規候補道路(道路R2)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q1’点から道路R2上の実際のP1’点へと正しく補正されるようになる(道路R1上のP1点に補正されない)。
【0046】
また、基準距離は、一定値でもよいし可変値でもよい。基準距離が一定値である場合には、可変値である場合に比べ処理負荷を軽減することができる。基準距離が可変値である場合には、状況に応じ適切な条件を用いて候補道路を検出することができるようになる。基準距離を可変値とする方法は種々考えられるが、例えば、図4(b)において、基準距離Xを、既存候補道路(道路R1)と新規候補道路(道路R2)との距離D9(つまり、既存候補道路(道路R1)のGPS距離D4と新規候補道路(道路R2)のGPS距離D5との距離差)に応じた可変値とする方法がある。例えば、距離差D9に係数0.5を乗じた値を基準距離Xとしてもよい。距離差D9に係数0.5を乗じて得る基準距離Xは、車両が実際に既存候補道路上を走行しているか、新規候補道路上を走行しているかを判断する際の閾値の値として適当であるからである。なお、係数が大きければ大きいほど既存候補道路GPS距離差は基準距離以下となる確率が高いため、車両位置が既存候補道路上に更新され易くなる。
【0047】
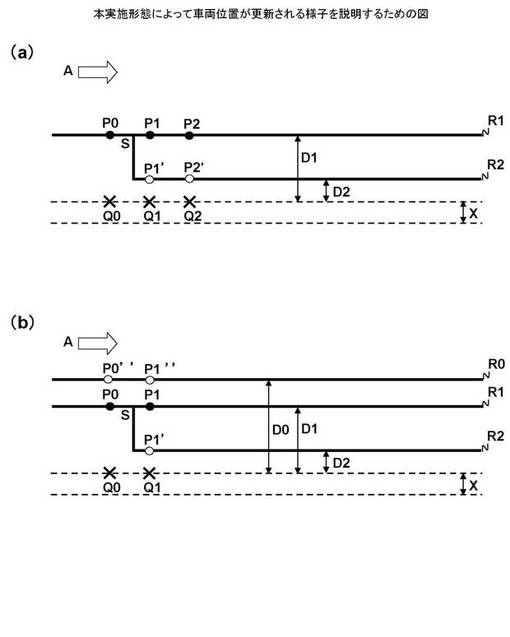
また、上記実施形態では、ある基準タイミングにて既存候補道路に加え新規候補道路を検出したときに、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止する処理(以下、「誤補正防止処理」という)を実行するが、既存候補道路に加え新規候補道路を検出した基準タイミング以降の基準タイミングでも継続して(同様に)、誤補正防止処理を実行してもよい。図5は、本実施形態によって車両位置が更新される様子を説明するための図である。既存候補道路に加え新規候補道路を検出した基準タイミング以降の基準タイミングでも継続して誤補正防止処理を実行する場合の動作を図5(a)により説明する。
【0048】
例えば、図5(a)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R1上のP1点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1点となった場合、GPS距離算出部210は、まず、誤補正防止処理を継続して実行すべき旨を示す情報(以下、「誤補正防止処理継続情報」という)がRAM26に記憶されていないと判断する。誤補正防止処理継続情報がRAM26に記憶されていないと判断したGPS距離算出部210は、候補道路検出部200が既存候補道路(道路R1)に加え新規候補道路(道路R2)を検出したと更に判断し、基準距離判定通知を基準距離判定部220に供給する。
【0049】
基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出し、算出した既存候補道路GPS距離差「0」が基準距離X以下であると判定する。そして、基準距離判定部220は、評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を評価値算出部230に供給する。
【0050】
評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を基準距離判定部220から取得した評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出し、新規候補道路(道路R2)のGPS距離D2を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給するとともに、最も高い評価値である既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報をRAM26に記憶する。なお、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正される(道路R2上のP1’点に補正されない)。
【0051】
更に、時刻T1に道路R1上のP1点を走行していた車両が時刻T2に道路R1上のP2点に移動し、車両の時刻T2におけるGPSによる測定位置が道路外のQ2点となった場合、既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報がRAM26に記憶されていると判断したGPS距離算出部210は、候補道路検出部200が既存候補道路(道路R1および道路R2)に加え新規候補道路を検出したか否かを判断せずに(または判断結果にかかわらず)、基準距離判定通知を基準距離判定部220に供給する。なお、時刻T1においては、道路R2は既存候補道路である。
【0052】
基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、誤補正防止処理継続情報に対応付けてRAM26に記憶されている既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出し、算出した既存候補道路GPS距離差「0」が基準距離X以下であると判定する。そして、基準距離判定部220は、評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を評価値算出部230に供給する。
【0053】
評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を基準距離判定部220から取得した評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出し、既存候補道路(道路R2)のGPS距離D2を評価式に代入し既存候補道路(道路R2)に係る評価値を算出する。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給するとともに、最も高い評価値である既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報をRAM26に記憶する(消去しない)。なお、車両位置は、Q2点から道路R1上の実際のP2点へと正しく補正される(道路R2上のP2’点に補正されない)。
【0054】
すなわち、評価値算出部230は、既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1に代えて既存候補道路GPS距離差「0」(既存候補道路に係る前々回(時刻T0)のGPS距離D1と既存候補道路に係る前回(時刻T1)のGPS距離D1との差)を評価式に代入して算出した評価値が最も高かった場合であって、かつ、基準距離判定部220が既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1と既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1との差が基準距離X以下であると判定した場合には、評価値が最も高かった最高評価既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1に代えて最高評価既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1と最高評価既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1との差を評価式に代入して最高評価既存候補道路(道路R1)に係る評価値を算出する。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合した場合に、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止するとともに、車両が更に当該既存候補道路を走行した場合にも、継続して、実際に車両が位置する既存候補道路と異なる道路上への車両位置の誤補正を極力防止することができるようになる。
【0055】
また、上記実施形態においては、既存候補道路が1つの例を説明しているが、既存候補道路は当然に複数であってもよい。また、最も高い評価値である候補道路が複数存在したときは、最も高い評価値である何れかの候補道路上に車両位置を更新する。一例として、GPS距離が最も小さい候補道路上に車両位置を更新する。
【0056】
例えば、図5(b)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R1上のP1点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1点となった場合、既存候補道路(道路R1)に平行な既存候補道路(道路R0)の既存候補道路GPS距離差「0」と既存候補道路(道路R1)の既存候補道路GPS距離差「0」とが一致し、最も高い評価値である候補道路が、既存候補道路(道路R0)および既存候補道路(道路R1)の2つとなるが、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正されるようになる(道路R2上のP1’点および道路R0上のP1’’点に補正されない)。
【0057】
なお、車両の時刻T0におけるGPSによる測定位置が道路外のQ0点にあったときは、既存候補道路(道路R0および道路R1)に加え新規候補道路(道路R2)が検出されていなかったため、既存候補道路(道路R0および道路R1)の既存候補道路GPS距離差を算出しない。この場合、既存候補道路(道路R1)のGPS距離D1が既存候補道路(道路R0)のGPS距離D0よりも小さいので、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正されるようになる(道路R0上のP0’’点に補正されない)。
【0058】
また、上記実施形態においては、GPS距離(GPS距離に代えて既存候補道路GPS距離差を代入する場合も含む)のみを評価式に代入して評価値を算出する例を説明しているが、GPS距離に加えて他の変数を評価式に代入して評価値を算出してもよい。例えば、GPS距離に加えて、位置測定部23によって測定された自律航法センサによる推定車両位置および車両方位のデータ(以下、「自律航法位置」という)と候補道路との距離(以下、「自律航法距離」という)、GPS位置(または自律航法位置)の履歴によって示される直線と候補道路との角度差(以下、「候補道路角度差」という)、車両位置が存在する道路と候補道路との接続性(車両位置が存在する道路と候補道路とが直接的に接続するか否か、または、車両位置が存在する道路と候補道路との間に介在する道路数)、などのうちの1以上を変数として評価式に代入して評価値を算出する。
【0059】
例えば、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合、候補道路検出部200は、基準タイミング毎に、GPS位置に加えて自律航法位置を位置測定部23から取得する。候補道路検出部200は、GPS位置、自律航法位置、および、地図情報メモリ22に記憶された地図データを参照し、候補道路を検出する。候補道路検出部200は、GPS位置、自律航法位置、および、候補道路をRAM26に記憶するとともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0060】
評価値算出部230は、評価値算出指示通知のみをGPS距離算出部210から取得した場合、RAM26に記憶された既存候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し既存候補道路に係る評価値を算出する。評価値算出部230は、評価値算出指示通知のみを基準距離判定部220から取得した場合、RAM26に記憶された既存候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶された新規候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し新規候補道路に係る評価値を算出する。
【0061】
一方、評価値算出部230は、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した場合、基準距離判定部220から取得した既存候補道路GPS距離差、および、RAM26に記憶された自律航法位置を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶された新規候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し新規候補道路に係る評価値を算出する。なお、GPS距離、自律航法距離、候補道路角度差、接続性のうち評価値に最も影響を与える変数は、GPS距離である。従って、GPS距離に代えて既存候補道路GPS距離差を代入すれば、自律航法距離(候補道路角度差、接続性も同様)にそれほど左右されず、評価値が増加する。
【0062】
なお、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合のGPS距離算出部210、基準距離判定部220および車両位置更新部240の動作は、GPS位置のみを評価式に代入して評価値を算出する場合と同様である。
【0063】
また、評価式にGPS位置に加えて候補道路角度差を代入して評価値を算出する場合、候補道路検出部200は、位置測定部23から取得したGPS位置、RAM26に記憶している過去のGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、検出した候補道路の候補道路角度差を算出し、算出した候補道路角度差を候補道路に対応付けてRAM26に記憶する。また、評価式にGPS位置に加えて接続性を代入して評価値を算出する場合、候補道路検出部200は、RAM26に記憶している前回の車両位置、および、地図情報メモリ22に記憶された地図データを参照し、検出した候補道路の接続性を算出し、算出した接続性を候補道路に対応付けてRAM26に記憶する。なお、GPS位置に加えて候補道路角度差または接続性を評価式に代入して評価値を算出する場合のGPS距離算出部210、基準距離判定部220、評価値算出部230および車両位置更新部240の動作は、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合の動作と同様である。
【0064】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0065】
【図1】本発明の実施形態であるナビゲーション装置の構成例を示す図である。
【図2】本実施形態の候補道路検出部、GPS距離算出部、基準距離判定部、評価値算出部および車両位置更新部を説明するための図である。
【図3】図1に示すナビゲーション装置の動作例を示すフローチャートである。
【図4】本実施形態によって車両位置が更新される様子を説明するための図である。
【図5】本実施形態によって車両位置が更新される様子を説明するための図である。
【図6】従来の投影法によって車両位置が更新される様子を説明するための図である。
【符号の説明】
【0066】
4 DVD−ROM
10 ナビゲーション装置
22 地図情報メモリ
23 位置測定部
24 CPU
25 ROM
26 RAM
33 マーク発生部
200 候補道路検出部
210 GPS距離算出部
220 基準距離判定部
230 評価値算出部
230 車両位置更新部
【技術分野】
【0001】
本発明は、ナビゲーション装置および車両位置更新方法に関し、特に、車両位置を示す車両位置マークを地図上に表示するナビゲーション装置および車両位置更新方法に関するものである。
【背景技術】
【0002】
一般に、カーナビゲーション装置における車両位置は、GPS(Global Positioning System)、自律航法センサを利用する自律航法技術、マップマッチング技術などによって特定される(例えば、特許文献1参照)。マップマッチング技術の一つに投影法がある。投影法は、GPSや自律航法技術により測定された測定位置から所定の条件下で投影し得る道路上のポイントを探し、当該ポイントへの車両位置の補正を試みる方法である。
【0003】
なお、特許文献1に記載の現在位置算出装置は、車両位置の補正候補である候補点を信頼度とともに算出し、信頼度の最も高い候補点に車両位置を更新する。また、信頼度が最も高い候補点以外の候補点のうち信頼度がある程度高い候補点については更に新たな候補点を算出すべく保存する一方、信頼度がある程度低い候補点については保存せずに削除するというものである。
【特許文献1】特開平08−334346号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の投影法を適用する場合に、実際に車両が存在する道路と異なる道路上に車両位置を補正してしまうという問題が生じ得る。図6は、従来の投影法によって車両位置が更新される様子を説明するための図である。従来の投影法によれば、例えば、図6に示すように、時刻T0に、道路R1上のP0点を矢印A方向に走行している車両の時刻T0におけるGPSによる測定位置が道路外のQ0点であった場合、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正される。しかしながら、時刻T1に、道路R1上のP1点に移動した車両のGPSによる測定位置が道路外のQ1点となった場合、車両位置は、Q1点から道路R1上のP1点へと正しく補正されずに道路R2上のP1’点に補正されてしまう。Q1点から道路R2までの距離D2がQ1点から道路R1までの距離D1よりも短いからである。なお、道路R2は、前回の測定時(時刻T0)において車両が実際に走行していた道路(道路R1)上の車両の実際の位置(P0点)と今回の測定時(時刻T1)において車両が実際に走行している道路(道路R1)上の車両の実際の位置(P1点)との間のある位置(S点)を分岐点として、車両が実際に走行している道路(道路R1)から今回の測定時(時刻T1)における測定位置(Q1点)に近い側に分岐している道路である。
【0005】
本発明は、このような問題を解決するために成されたものである。すなわち、実際に車両が位置する道路と異なる道路上への車両位置の誤補正を極力防止することを目的とする。具体的には、車両が走行している道路上の前回の測定時における車両の実際の位置と今回の測定時における車両の実際の位置との間のある位置を分岐点として車両が走行している道路から今回の測定時の測定位置に近い側に分岐する他の道路上への車両位置の誤補正を極力防止することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決するために、本発明では、GPSを用いて都度測定される車両の測定位置であるGPS位置と車両位置を更新すべき候補である候補道路との距離を候補道路に係るGPS距離として都度算出しておく。そして、前回検出した既存候補道路に加えて前回未検出であった新規候補道路を今回検出した場合であって、かつ、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差が基準距離以下でないと判定した場合には、GPS距離を変数として含む式であってGPS距離が短ければ短いほど高い評価値を算出する評価式に、既存候補道路に係る今回のGPS距離を代入して既存候補道路に係る評価値を算出するとともに、評価式に新規候補道路に係る今回のGPS距離を代入して新規候補道路に係る評価値を算出し、評価値が最も高い候補道路上に車両位置を更新するようにしている。一方、前回検出した既存候補道路に加えて前回未検出であった新規候補道路を今回検出した場合であるが、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差が基準距離以下であると判定した場合には、評価式に既存候補道路に係る今回のGPS距離に代えて既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差を代入して既存候補道路に係る評価値を算出するとともに、評価式に新規候補道路に係る今回のGPS距離を代入して新規候補道路に係る評価値を算出し、評価値が最も高い候補道路上に車両位置を更新するようにしている。
【発明の効果】
【0007】
上記のように構成した本発明によれば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合、前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差であって車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される差よりも大きな値を基準距離としておけば、当該差は基準距離以下となる。従って、評価式に既存候補道路に係る今回のGPS距離に代えて前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差を代入して既存候補道路に係る評価値を算出することになる。また、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合、既存候補道路に係る今回のGPS距離に代えて評価式に代入する前回算出した既存候補道路に係る前回のGPS距離と今回算出した既存候補道路に係る今回のGPS距離との差は、新規候補道路に係る今回のGPS距離よりも小さくなり易い。車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合の当該差は、通常、極めて小さな値となり易いからである。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る評価値は新規候補道路に係る評価値よりも高くなり易くなるため、新規候補道路ではなく既存候補道路上に車両位置が更新され易くなる。すなわち、実際に車両が位置する既存候補道路と異なる新規候補道路上への車両位置の誤補正を極力防止することができるようになる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本発明の実施形態であるナビゲーション装置10の構成例を示す図である。ナビゲーション装置10は、図1(a)に示すように、記憶媒体制御部21、地図情報メモリ22、位置測定部23、CPU24(プロセッサ)、ROM25、RAM26、操作部30、ディスプレイコントローラ31、ビデオRAM32、マーク発生部33、画像合成部40、表示装置50を備えて構成される。
【0009】
記憶媒体制御部21は、DVD−ROM4などの記憶媒体の読み取りを制御する。DVD−ROM4は、地図表示、経路探索等に必要な各種の地図データを記憶している。記憶媒体制御部21は、DVD−ROM4から読み出した地図データを地図情報メモリ22に一時的に記憶する。
【0010】
位置測定部23は、自律航法センサ、GPS受信機、位置計算用CPU等で構成され、車両の現在位置を測定する。自律航法センサは、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する車速センサ(距離センサ)と、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)とを含んでいる。自律航法センサは、これらの車速センサおよび角速度センサによって車両の相対位置および方位を検出する。
【0011】
位置計算用CPUは、自律航法センサから出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車の車両位置(推定車両位置)および車両方位を計算する。また、GPS受信機は、複数のGPS衛星から送られてくる電波をGPSアンテナで受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車の車両位置と1サンプリング時間ΔT前の自車の車両位置とに基づいて計算する)。なお、位置測定部23は、測定した車両の現在位置をCPU24に供給する他、車両の走行軌跡としてRAM26に記憶する。なお、RAM26は、車両の走行軌跡の他、各種処理の過程で得られるデータや各種処理の結果得られるデータも一時的に記憶する。
【0012】
CPU24は、ナビゲーション装置10を制御する。CPU24は、例えば、本発明の候補道路検出部、本発明のGPS距離算出部、本発明の基準距離判定部、本発明の評価値算出部、および、本発明の車両位置更新部として機能する。なお、本発明の候補道路検出部、GPS距離算出部、基準距離判定部、評価値算出部および車両位置更新部の動作の詳細については後述する。
【0013】
ROM25は、各種プログラムを記憶する。例えば、ROM25は、図1(b)に示すように、CPU24を本発明の候補道路検出部として機能させる候補道路検出プログラム100、CPU24を本発明のGPS距離算出部として機能させるGPS距離算出プログラム110、CPU24を本発明の基準距離判定部として機能させる基準距離判定プログラム120、CPU24を本発明の評価値算出部として機能させる評価値算出プログラム130、CPU24を本発明の車両位置更新部として機能させる車両位置更新プログラム140などを記憶する。
【0014】
操作部30は、リモコン、タッチパネル、ジョイステックなどから構成される。利用者は、操作部30を介して、ナビゲーション装置10に対する各種の設定/操作を行う。ディスプレイコントローラ31は、地図情報メモリ22に格納された地図データに基づいて、表示装置50への表示に必要な地図画像データを生成する。ビデオRAM32は、ディスプレイコントローラ31によって生成された地図画像データを一時的に記憶する。すなわち、ディスプレイコントローラ31によって生成された地図画像データはビデオRAM32に一時的に記憶され、1画面分の地図画像データが読み出されて画像合成部40に出力される。
【0015】
マーク発生部33は、自車の車両位置に表示する車両位置マークや、ガソリンスタンドやコンビニエンスストア等を表示する各種ランドマーク等を発生して出力する。画像合成部40は、各種画像を合成して出力する。具体的には、ビデオRAM32から出力された地図画像データに対して、マーク発生部33から出力される各画像データを重ねて画像合成を行い、合成した画像データを表示装置50に出力する。
【0016】
以下、本発明の候補道路検出部として機能として機能するCPU24(以下、単に「候補道路検出部200」という)、本発明のGPS距離算出部として機能するCPU24(以下、単に「GPS距離算出部210」という)、本発明の基準距離判定部として機能するCPU24(以下、単に「基準距離判定部220」という)、本発明の評価値算出部として機能するCPU24(以下、単に「評価値算出部230」という)、および、本発明の車両位置更新部として機能するCPU24(以下、単に「車両位置更新部240」という)の動作の詳細を説明する。図2は、本実施形態の候補道路検出部200、GPS距離算出部210、基準距離判定部220、評価値算出部230および車両位置更新部240を説明するための図である。
【0017】
図2に示すように、候補道路検出部200は、所定のタイミング(以下、「基準タイミング」という)毎に、GPS受信機による車両位置および車両方位のデータ(以下、「GPS位置」という)を車両の測定位置として位置測定部23から取得する。候補道路検出部200は、位置測定部23から車両の測定位置を取得した場合、位置測定部23から取得したGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、車両位置を更新すべき候補である道路(以下、「候補道路」という)を検出する。候補道路検出部200は、候補道路を検出した場合、位置測定部23から取得したGPS位置、および、検出した候補道路(候補道路を特定する情報)をRAM26に記憶するとともに、GPS位置と候補道路との距離(以下、「GPS距離」という)を算出すべき旨の通知(以下、「GPS距離算出通知」という)をGPS距離算出部210に供給する。
【0018】
GPS距離算出部210は、基準タイミング毎に、GPS距離算出通知を候補道路検出部200から取得する。GPS距離算出部210は、GPS距離算出通知を候補道路検出部200から取得した場合、地図情報メモリ22に記憶された地図データ、RAM26に記憶されているGPS位置および候補道路を参照し、GPS距離を算出する。GPS距離算出部210は、GPS距離を算出した場合、算出したGPS距離をGPS位置に対応付けてRAM26に記憶する。
【0019】
また、GPS距離算出部210は、GPS距離算出通知を候補道路検出部200から取得した場合、候補道路検出部200が前回検出(前回の基準タイミングにて検出)した候補道路(以下「既存候補道路」という)に加え前回未検出の候補道路(以下、「新規候補道路」という)を今回検出(今回の基準タイミングにて検出)したか否か、つまり、RAM26に既存候補道路に加え新規候補道路が記憶されているか否かを判断する。GPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を今回検出したと判断した場合、既存候補道路に係る前回のGPS距離と既存候補道路に係る今回のGPS距離との差(以下、「既存候補道路GPS距離差」という)と、基準距離とを比較すべき旨の通知(以下、「基準距離判定通知」という)を基準距離判定部220に供給する。なお、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値を設定する。
【0020】
一方、GPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を今回検出していないと判断した場合、候補道路の評価値を算出すべき旨の通知(以下、「評価値算出指示通知」という)を評価値算出部230に供給する。
【0021】
基準距離判定部220は、既存候補道路に加え新規候補道路がGPS距離算出部210により検出された場合、基準距離判定通知をGPS距離算出部210から取得する。基準距離判定部220は、基準距離判定通知をGPS距離算出部210から取得した場合、RAM26に記憶されている既存候補道路に係る前回のGPS距離と今回のGPS距離とを参照し、既存候補道路GPS距離差を算出する。基準距離判定部220は、既存候補道路GPS距離差を算出した場合、算出した既存候補道路GPS距離差と基準距離とを比較する。基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下でないと判定した場合、評価値算出指示通知を評価値算出部230に供給する。一方、基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下であると判定した場合、評価値算出指示通知とともに当該既存候補道路GPS距離差を評価値算出部230に供給する。
【0022】
評価値算出部230は、基準タイミング毎に、評価値算出指示通知をGPS距離算出部210または基準距離判定部220から取得する。具体的には、評価値算出部230は、既存候補道路に加え新規候補道路が検出されていない場合、評価値算出指示通知をGPS距離算出部210から取得する。また、基準距離判定部220は、既存候補道路に加え新規候補道路が検出された場合であって、かつ、既存候補道路GPS距離差が基準距離以下でない場合、評価値算出指示通知を基準距離判定部220から取得する。また、基準距離判定部220は、既存候補道路に加え新規候補道路が検出された場合であって、かつ、既存候補道路GPS距離差が基準距離以下である場合、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得する。
【0023】
評価値算出部230は、評価値算出指示通知のみをGPS距離算出部210から取得した場合(既存候補道路に加え新規候補道路が検出されていない場合)、GPS距離を変数として含む式であってGPS距離が短ければ短いほど高い評価値を算出する評価式に、RAM26に記憶されている既存候補道路に係る今回のGPS距離を代入し既存候補道路に係る評価値を算出する。
【0024】
評価値算出部230は、評価値算出指示通知のみを基準距離判定部220から取得した場合(既存候補道路に加え新規候補道路が検出された場合であってかつ既存候補道路GPS距離差が基準距離以下でない場合)、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する。
【0025】
評価値算出部230は、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した場合(既存候補道路に加え新規候補道路が検出された場合であってかつ既存候補道路GPS距離差が基準距離以下である場合)、RAM26に記憶されている既存候補道路に係る今回のGPS距離に代えて、基準距離判定部220から取得した既存候補道路GPS距離差を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する。
【0026】
評価値算出部230は、候補道路(既存候補道路/既存候補道路および新規候補道路)に係る評価値を算出した場合、最も高い評価値である候補道路を特定する。評価値算出部230は、最も高い評価値である候補道路を特定した場合、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0027】
車両位置更新部240は、最も高い評価値である候補道路を評価値算出部230から取得する。車両位置更新部240は、最も高い評価値である候補道路を評価値算出部230から取得した場合、価値算出部230から取得した当該候補道路とRAM26に記憶されているGPS位置とを参照し、当該候補道路上に車両位置を更新する。車両位置更新部240は、車両位置を更新した場合、更新後の車両位置をマーク発生部33に供給する。なお、マーク発生部33は、更新後の車両位置に車両位置マークを発生し画像合成部40に供給し、画像合成部40によって当該車両位置マークが表示装置50に出力される。
【0028】
以下、ナビゲーション装置10の動作について説明する。図3は、図1に示すナビゲーション装置10の動作例を示すフローチャートである。図3に示すフローチャートは、ナビゲーション装置10の起動(例えば電源オン)により開始する。
【0029】
図3において、候補位置特定部210は、基準タイミングになったか否かを判断する(ステップS100)。基準タイミングになっていないと候補位置特定部210にて判断した場合(ステップS100:No)、候補位置特定部210は、基準タイミングになるまで同処理を繰り返す。一方、基準タイミングになったと候補位置特定部210にて判断した場合(ステップS100:Yes)、候補位置特定部210は、GPS位置を車両の測定位置として位置測定部23から取得する。GPS位置を取得した候補道路検出部200は、位置測定部23から取得したGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、候補道路を検出する(ステップS110)。候補道路検出部200は、候補道路を検出した場合、位置測定部23から取得したGPS位置、および、検出した候補道路をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0030】
GPS距離算出通知を候補道路検出部200から取得したGPS距離算出部210は、地図情報メモリ22に記憶された地図データ、RAM26に記憶されているGPS位置および候補道路を参照し、GPS距離を算出する(ステップS120)。GPS距離算出部210は、GPS距離を算出した場合、算出したGPS距離をGPS位置に対応付けてRAM26に記憶する(ステップS125)。GPS距離をGPS位置に対応付けてRAM26に記憶したGPS距離算出部210は、候補道路検出部200が既存候補道路に加え新規候補道路を検出したか否かを判断する(ステップS130)。候補道路検出部200が既存候補道路に加え新規候補道路を検出したとGPS距離算出部210にて判断した場合(ステップS130:Yes)、GPS距離算出部210は、基準距離判定通知を基準距離判定部220に供給する。一方、候補道路検出部200が既存候補道路に加え新規候補道路を検出していないとGPS距離算出部210にて判断した場合(ステップS130:No)、GPS距離算出部210は、評価値算出指示通知を評価値算出部230に供給する。
【0031】
ステップS130(Yes)に続いて、基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、RAM26に記憶されている既存候補道路に係る前回のGPS距離と今回のGPS距離とを参照し、既存候補道路GPS距離差を算出する(ステップS140)。既存候補道路GPS距離差を算出した基準距離判定部220は、算出した既存候補道路GPS距離差が基準距離以下であるか否かを判定する(ステップS150)。算出した既存候補道路GPS距離差が基準距離以下でないと基準距離判定部220にて判定した場合(ステップS150:No)、基準距離判定部220は、評価値算出指示通知を評価値算出部230に供給する。一方、算出した既存候補道路GPS距離差が基準距離以下であると基準距離判定部220にて判定した場合(ステップS150:Yes)、基準距離判定部220は、評価値算出指示通知とともに当該既存候補道路GPS距離差を評価値算出部230に供給する。
【0032】
ステップS130(No)に続いて、評価値算出指示通知をGPS距離算出部210から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出する(ステップS160)。候補道路(既存候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路)を特定し、特定した最も高い評価値である候補道路(既存候補道路)を車両位置更新部240に供給する。
【0033】
ステップS150(No)に続いて、評価値算出指示通知のみを基準距離判定部220から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離を評価式に代入し既存候補道路に係る評価値を算出するとともに(ステップS162)、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する(ステップS170)。候補道路(既存候補道路および新規候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路または新規候補道路)を特定し、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0034】
ステップS150(Yes)に続いて、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した評価値算出部230は、RAM26に記憶されている既存候補道路に係る今回のGPS距離に代えて基準距離判定部220から取得した既存候補道路GPS距離差を評価式に代入し既存候補道路に係る評価値を算出するとともに(ステップS164)、RAM26に記憶されている新規候補道路に係る今回のGPS距離を評価式に代入し新規候補道路に係る評価値を算出する(ステップS170)。候補道路(既存候補道路および新規候補道路)に係る評価値を算出した評価値算出部230は、最も高い評価値である候補道路(既存候補道路または新規候補道路)を特定し、特定した最も高い評価値である候補道路を車両位置更新部240に供給する。
【0035】
ステップS160またはステップS170に続いて、最も高い評価値である候補道路を評価値算出部230から取得した車両位置更新部240は、価値算出部230から取得した最も高い評価値である候補道路とRAM26に記憶されているGPS位置とを参照し、最も高い評価値である候補道路上に車両位置を更新する(ステップS180)。最も高い評価値である候補道路上に車両位置を更新した車両位置更新部240は、更新後の車両位置をマーク発生部33に供給する(ステップS185)。
【0036】
次に、非図示の終了判断部は、処理を終了するか否かを判断する(ステップS190)。処理を終了すると終了判断部にて判断した場合(ステップS190:Yes)、本フローチャートは終了する。一方、処理を終了しないと終了判断部にて判断した場合(ステップS190:No)、ステップS100に戻る。なお、終了判断部は、例えば、ナビゲーション装置10の電源がオフされた場合などに処理を終了すると判断する。
【0037】
以下、図3に示すフローチャートを補足説明する。図4は、本実施形態によって車両位置が更新される様子を説明するための図である。例えば、図4(a)に示すように、時刻T0に、道路R1上のP0点を矢印A方向に走行している車両のGPSによる測定位置が道路外のQ0点であった場合(候補位置特定部210がGPS位置Q0を位置測定部23から取得した場合)、候補道路検出部200は、候補道路(道路R1)を検出し(ステップS110)、GPS位置、および、候補道路(道路R1)をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0038】
GPS距離算出部210は、候補道路(道路R1)のGPS距離D1を算出し(ステップS120)、RAM26に記憶する(ステップS125)。GPS距離算出部210は、既存候補道路(道路R1)に加え新規候補道路を検出していないと判断し(ステップS130:No)、評価値算出指示通知を評価値算出部230に供給する。評価値算出部230は、既存候補道路(道路R1)のGPS距離を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS160)。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給する。車両位置更新部240は、最も高い評価値である既存候補道路(道路R1)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正される。
【0039】
続いて、時刻T1に、道路R1上のP1点に移動した車両のGPSによる測定位置が道路外のQ1点となった場合(候補位置特定部210がGPS位置Q1を位置測定部23から取得した場合)、候補道路検出部200は、候補道路(道路R1および道路R2)を検出し(ステップS110)、GPS位置、および、候補道路(道路R1および道路R2)をRAM26に記憶する(ステップS115)とともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0040】
GPS距離算出部210は、候補道路(道路R1)のGPS距離D1、および、候補道路(道路R2)のGPS距離D2を算出し(ステップS120)、RAM26に記憶する(ステップS125)。GPS距離算出部210は、既存候補道路(道路R1)に加え新規候補道路(道路R2)を検出したと判断し(ステップS130:Yes)、基準距離判定通知を基準距離判定部220に供給する。基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出する(ステップS140)。基準距離判定部220は、道路R1の既存候補道路GPS距離差「0」が基準距離X以下であると判定し(ステップS150:Yes)、評価値算出指示通知とともに道路R1の既存候補道路GPS距離差「0」を評価値算出部230に供給する。なお、基準距離Xは、車両が既存候補道路(道路R1)上の分岐点Sにて新規候補道路(R2)に進入せず既存候補道路(道路R1)をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値である。
【0041】
評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて道路R1の既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS164)。また、評価値算出部230は、新規候補道路(道路R2)のGPS距離D2を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する(ステップS170)。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給する。車両位置更新部240は、最も高い評価値である既存候補道路(道路R1)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正される(道路R2上のP1’点に補正されない)。
【0042】
以上、本実施形態のナビゲーション装置10によれば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値を基準距離としておけば、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路GPS距離差は基準距離以下となる。従って、既存候補道路に係る今回のGPS距離に代えて既存候補道路GPS距離差を評価式に代入して既存候補道路に係る評価値を算出することになる。また、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る今回のGPS距離に代えて評価式に代入する既存候補道路GPS距離差は、新規候補道路に係る今回のGPS距離よりも小さくなり易い。車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合の既存候補道路GPS距離差は、通常、極めて小さな値となり易いからである。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合、既存候補道路に係る評価値は新規候補道路に係る評価値よりも高くなり易くなるため、新規候補道路ではなく既存候補道路上に車両位置が更新され易くなる。すなわち、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止することができるようになる。
【0043】
なお、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であると説明したが、基準距離は、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であって、かつ、車両が既存候補道路上の分岐点にて新規候補道路に進入し新規候補道路を走行するような場合に想定される既存候補道路GPS距離差よりも小さな値である方が好ましい。車両位置を新規候補道路上に更新すべきときに、誤って既存候補道路上に更新されてしまうこと極力防止するためである。
【0044】
基準距離を、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行するような場合に想定される既存候補道路GPS距離差よりも大きな値であって、かつ、車両が既存候補道路上の分岐点にて新規候補道路に進入し新規候補道路を走行するような場合に想定される既存候補道路GPS距離差よりも小さな値に設定した場合の動作を図4(b)により説明する。図4(b)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R2上のP1’点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1’点となった場合、基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D4と差「Y」)が基準距離X以下でないと判定するようになる(ステップS150:No)。なお、既存候補道路GPS距離差Yは、既存候補道路(道路R1)と新規候補道路(道路R2)との距離D9に概ね等しくなる。
【0045】
この場合、評価値算出部230は、既存候補道路(道路R1)のGPS距離D4を評価式に代入し既存候補道路(道路R1)に係る評価値を算出する(ステップS162)。また、評価値算出部230は、新規候補道路(道路R2)のGPS距離D5を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する(ステップS170)。これにより、車両位置更新部240は、最も高い評価値である新規候補道路(道路R2)上に車両位置を更新する(ステップS180)。つまり、車両位置は、Q1’点から道路R2上の実際のP1’点へと正しく補正されるようになる(道路R1上のP1点に補正されない)。
【0046】
また、基準距離は、一定値でもよいし可変値でもよい。基準距離が一定値である場合には、可変値である場合に比べ処理負荷を軽減することができる。基準距離が可変値である場合には、状況に応じ適切な条件を用いて候補道路を検出することができるようになる。基準距離を可変値とする方法は種々考えられるが、例えば、図4(b)において、基準距離Xを、既存候補道路(道路R1)と新規候補道路(道路R2)との距離D9(つまり、既存候補道路(道路R1)のGPS距離D4と新規候補道路(道路R2)のGPS距離D5との距離差)に応じた可変値とする方法がある。例えば、距離差D9に係数0.5を乗じた値を基準距離Xとしてもよい。距離差D9に係数0.5を乗じて得る基準距離Xは、車両が実際に既存候補道路上を走行しているか、新規候補道路上を走行しているかを判断する際の閾値の値として適当であるからである。なお、係数が大きければ大きいほど既存候補道路GPS距離差は基準距離以下となる確率が高いため、車両位置が既存候補道路上に更新され易くなる。
【0047】
また、上記実施形態では、ある基準タイミングにて既存候補道路に加え新規候補道路を検出したときに、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止する処理(以下、「誤補正防止処理」という)を実行するが、既存候補道路に加え新規候補道路を検出した基準タイミング以降の基準タイミングでも継続して(同様に)、誤補正防止処理を実行してもよい。図5は、本実施形態によって車両位置が更新される様子を説明するための図である。既存候補道路に加え新規候補道路を検出した基準タイミング以降の基準タイミングでも継続して誤補正防止処理を実行する場合の動作を図5(a)により説明する。
【0048】
例えば、図5(a)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R1上のP1点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1点となった場合、GPS距離算出部210は、まず、誤補正防止処理を継続して実行すべき旨を示す情報(以下、「誤補正防止処理継続情報」という)がRAM26に記憶されていないと判断する。誤補正防止処理継続情報がRAM26に記憶されていないと判断したGPS距離算出部210は、候補道路検出部200が既存候補道路(道路R1)に加え新規候補道路(道路R2)を検出したと更に判断し、基準距離判定通知を基準距離判定部220に供給する。
【0049】
基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出し、算出した既存候補道路GPS距離差「0」が基準距離X以下であると判定する。そして、基準距離判定部220は、評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を評価値算出部230に供給する。
【0050】
評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を基準距離判定部220から取得した評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出し、新規候補道路(道路R2)のGPS距離D2を評価式に代入し新規候補道路(道路R2)に係る評価値を算出する。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給するとともに、最も高い評価値である既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報をRAM26に記憶する。なお、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正される(道路R2上のP1’点に補正されない)。
【0051】
更に、時刻T1に道路R1上のP1点を走行していた車両が時刻T2に道路R1上のP2点に移動し、車両の時刻T2におけるGPSによる測定位置が道路外のQ2点となった場合、既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報がRAM26に記憶されていると判断したGPS距離算出部210は、候補道路検出部200が既存候補道路(道路R1および道路R2)に加え新規候補道路を検出したか否かを判断せずに(または判断結果にかかわらず)、基準距離判定通知を基準距離判定部220に供給する。なお、時刻T1においては、道路R2は既存候補道路である。
【0052】
基準距離判定通知をGPS距離算出部210から取得した基準距離判定部220は、誤補正防止処理継続情報に対応付けてRAM26に記憶されている既存候補道路(道路R1)の既存候補道路GPS距離差(前回のGPS距離D1と今回のGPS距離D1と差「0」)を算出し、算出した既存候補道路GPS距離差「0」が基準距離X以下であると判定する。そして、基準距離判定部220は、評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を評価値算出部230に供給する。
【0053】
評価値算出指示通知とともに既存候補道路(道路R1)の既存候補道路GPS距離差「0」を基準距離判定部220から取得した評価値算出部230は、既存候補道路(道路R1)のGPS距離D1に代えて既存候補道路GPS距離差「0」を評価式に代入し既存候補道路(道路R1)に係る評価値を算出し、既存候補道路(道路R2)のGPS距離D2を評価式に代入し既存候補道路(道路R2)に係る評価値を算出する。評価値算出部230は、最も高い評価値である既存候補道路(道路R1)を車両位置更新部240に供給するとともに、最も高い評価値である既存候補道路(道路R1)に対応付けて誤補正防止処理継続情報をRAM26に記憶する(消去しない)。なお、車両位置は、Q2点から道路R1上の実際のP2点へと正しく補正される(道路R2上のP2’点に補正されない)。
【0054】
すなわち、評価値算出部230は、既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1に代えて既存候補道路GPS距離差「0」(既存候補道路に係る前々回(時刻T0)のGPS距離D1と既存候補道路に係る前回(時刻T1)のGPS距離D1との差)を評価式に代入して算出した評価値が最も高かった場合であって、かつ、基準距離判定部220が既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1と既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1との差が基準距離X以下であると判定した場合には、評価値が最も高かった最高評価既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1に代えて最高評価既存候補道路(道路R1)に係る前回(時刻T1)のGPS距離D1と最高評価既存候補道路(道路R1)に係る今回(時刻T2)のGPS距離D1との差を評価式に代入して最高評価既存候補道路(道路R1)に係る評価値を算出する。これにより、車両が既存候補道路上の分岐点にて新規候補道路に進入せず既存候補道路をそのまま走行した場合した場合に、実際に車両が位置する既存候補道路と異なる道路(新規候補道路)上への車両位置の誤補正を極力防止するとともに、車両が更に当該既存候補道路を走行した場合にも、継続して、実際に車両が位置する既存候補道路と異なる道路上への車両位置の誤補正を極力防止することができるようになる。
【0055】
また、上記実施形態においては、既存候補道路が1つの例を説明しているが、既存候補道路は当然に複数であってもよい。また、最も高い評価値である候補道路が複数存在したときは、最も高い評価値である何れかの候補道路上に車両位置を更新する。一例として、GPS距離が最も小さい候補道路上に車両位置を更新する。
【0056】
例えば、図5(b)に示すように、時刻T0に道路R1上のP0点を走行していた車両が時刻T1に道路R1上のP1点に移動し、車両の時刻T1におけるGPSによる測定位置が道路外のQ1点となった場合、既存候補道路(道路R1)に平行な既存候補道路(道路R0)の既存候補道路GPS距離差「0」と既存候補道路(道路R1)の既存候補道路GPS距離差「0」とが一致し、最も高い評価値である候補道路が、既存候補道路(道路R0)および既存候補道路(道路R1)の2つとなるが、車両位置は、Q1点から道路R1上の実際のP1点へと正しく補正されるようになる(道路R2上のP1’点および道路R0上のP1’’点に補正されない)。
【0057】
なお、車両の時刻T0におけるGPSによる測定位置が道路外のQ0点にあったときは、既存候補道路(道路R0および道路R1)に加え新規候補道路(道路R2)が検出されていなかったため、既存候補道路(道路R0および道路R1)の既存候補道路GPS距離差を算出しない。この場合、既存候補道路(道路R1)のGPS距離D1が既存候補道路(道路R0)のGPS距離D0よりも小さいので、車両位置は、Q0点から道路R1上の実際のP0点へと正しく補正されるようになる(道路R0上のP0’’点に補正されない)。
【0058】
また、上記実施形態においては、GPS距離(GPS距離に代えて既存候補道路GPS距離差を代入する場合も含む)のみを評価式に代入して評価値を算出する例を説明しているが、GPS距離に加えて他の変数を評価式に代入して評価値を算出してもよい。例えば、GPS距離に加えて、位置測定部23によって測定された自律航法センサによる推定車両位置および車両方位のデータ(以下、「自律航法位置」という)と候補道路との距離(以下、「自律航法距離」という)、GPS位置(または自律航法位置)の履歴によって示される直線と候補道路との角度差(以下、「候補道路角度差」という)、車両位置が存在する道路と候補道路との接続性(車両位置が存在する道路と候補道路とが直接的に接続するか否か、または、車両位置が存在する道路と候補道路との間に介在する道路数)、などのうちの1以上を変数として評価式に代入して評価値を算出する。
【0059】
例えば、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合、候補道路検出部200は、基準タイミング毎に、GPS位置に加えて自律航法位置を位置測定部23から取得する。候補道路検出部200は、GPS位置、自律航法位置、および、地図情報メモリ22に記憶された地図データを参照し、候補道路を検出する。候補道路検出部200は、GPS位置、自律航法位置、および、候補道路をRAM26に記憶するとともに、GPS距離算出通知をGPS距離算出部210に供給する。
【0060】
評価値算出部230は、評価値算出指示通知のみをGPS距離算出部210から取得した場合、RAM26に記憶された既存候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し既存候補道路に係る評価値を算出する。評価値算出部230は、評価値算出指示通知のみを基準距離判定部220から取得した場合、RAM26に記憶された既存候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶された新規候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し新規候補道路に係る評価値を算出する。
【0061】
一方、評価値算出部230は、評価値算出指示通知とともに既存候補道路GPS距離差を基準距離判定部220から取得した場合、基準距離判定部220から取得した既存候補道路GPS距離差、および、RAM26に記憶された自律航法位置を評価式に代入し既存候補道路に係る評価値を算出するとともに、RAM26に記憶された新規候補道路に係る今回のGPS距離および自律航法位置を評価式に代入し新規候補道路に係る評価値を算出する。なお、GPS距離、自律航法距離、候補道路角度差、接続性のうち評価値に最も影響を与える変数は、GPS距離である。従って、GPS距離に代えて既存候補道路GPS距離差を代入すれば、自律航法距離(候補道路角度差、接続性も同様)にそれほど左右されず、評価値が増加する。
【0062】
なお、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合のGPS距離算出部210、基準距離判定部220および車両位置更新部240の動作は、GPS位置のみを評価式に代入して評価値を算出する場合と同様である。
【0063】
また、評価式にGPS位置に加えて候補道路角度差を代入して評価値を算出する場合、候補道路検出部200は、位置測定部23から取得したGPS位置、RAM26に記憶している過去のGPS位置、および、地図情報メモリ22に記憶された地図データを参照し、検出した候補道路の候補道路角度差を算出し、算出した候補道路角度差を候補道路に対応付けてRAM26に記憶する。また、評価式にGPS位置に加えて接続性を代入して評価値を算出する場合、候補道路検出部200は、RAM26に記憶している前回の車両位置、および、地図情報メモリ22に記憶された地図データを参照し、検出した候補道路の接続性を算出し、算出した接続性を候補道路に対応付けてRAM26に記憶する。なお、GPS位置に加えて候補道路角度差または接続性を評価式に代入して評価値を算出する場合のGPS距離算出部210、基準距離判定部220、評価値算出部230および車両位置更新部240の動作は、GPS位置に加えて自律航法距離を評価式に代入して評価値を算出する場合の動作と同様である。
【0064】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【図面の簡単な説明】
【0065】
【図1】本発明の実施形態であるナビゲーション装置の構成例を示す図である。
【図2】本実施形態の候補道路検出部、GPS距離算出部、基準距離判定部、評価値算出部および車両位置更新部を説明するための図である。
【図3】図1に示すナビゲーション装置の動作例を示すフローチャートである。
【図4】本実施形態によって車両位置が更新される様子を説明するための図である。
【図5】本実施形態によって車両位置が更新される様子を説明するための図である。
【図6】従来の投影法によって車両位置が更新される様子を説明するための図である。
【符号の説明】
【0066】
4 DVD−ROM
10 ナビゲーション装置
22 地図情報メモリ
23 位置測定部
24 CPU
25 ROM
26 RAM
33 マーク発生部
200 候補道路検出部
210 GPS距離算出部
220 基準距離判定部
230 評価値算出部
230 車両位置更新部
【特許請求の範囲】
【請求項1】
道路情報を含む地図データに基づいてディスプレイ画面に地図を描画するとともに、車両位置を示す車両位置マークを上記地図上に表示するナビゲーション装置であって、
都度測定される車両の測定位置に基づいて、上記車両位置を更新すべき候補である候補道路を都度検出する候補道路検出部と、
GPSを用いて都度測定される車両の測定位置であるGPS位置と上記候補道路検出部によって都度検出される上記候補道路との距離を上記候補道路に係るGPS距離として都度算出するGPS距離算出部と、
上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合に、上記GPS距離算出部が前回算出した上記既存候補道路に係る前回のGPS距離と上記GPS距離算出部が今回算出した上記既存候補道路に係る今回のGPS距離との差が基準距離以下であるか否かを判定する基準距離判定部と、
上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下でないと判定した場合に、上記GPS距離を変数として含む式であって上記GPS距離が短ければ短いほど高い評価値を算出する評価式に上記既存候補道路に係る今回のGPS距離を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記GPS距離算出部が今回算出した上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する一方、上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると判定した場合には、上記評価式に上記既存候補道路に係る今回のGPS距離に代えて上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する評価値算出部と、
上記評価値算出部よって算出される上記評価値が最も高い上記候補道路上に上記車両位置を更新する車両位置更新部とを備えることを特徴とするナビゲーション装置。
【請求項2】
上記評価値算出部は、更に、上記既存候補道路に係る前回のGPS距離に代えて上記既存候補道路に係る前々回のGPS距離と上記既存候補道路に係る前回のGPS距離との差を上記評価式に代入して算出した上記評価値が最も高かった場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると判定した場合には、上記評価値が最も高かった最高評価既存候補道路に係る今回のGPS距離に代えて上記最高評価既存候補道路に係る前回のGPS距離と上記最高評価既存候補道路に係る今回のGPS距離との差を上記評価式に代入して上記最高評価既存候補道路に係る上記評価値を算出することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
車両の位置を都度測定する測定ステップと、
上記測定ステップによって都度測定される車両の測定位置に基づいて、上記車両位置を更新すべき候補である候補道路を都度検出する候補道路検出ステップと、
GPSを用いて都度測定される車両の測定位置であるGPS位置と上記候補道路検出ステップによって都度検出される上記候補道路との距離を上記候補道路に係るGPS距離として都度算出するGPS距離算出ステップと、
上記候補道路検出ステップによって前回検出された既存候補道路が今回も検出された場合に、上記GPS距離算出ステップによって前回算出された上記既存候補道路に係る前回のGPS距離と上記GPS距離算出ステップによって今回算出された上記既存候補道路に係る今回のGPS距離との差が基準距離以下であるか否かを判定する基準距離判定ステップと、
前回検出の既存候補道路に加え前回未検出の新規候補道路が上記候補道路検出ステップによって今回検出された場合であって、かつ、上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下でないと上記基準距離判定ステップによって判定された場合に、上記GPS距離を変数として含む式であって上記GPS距離が短ければ短いほど高い評価値を算出する評価式に上記既存候補道路に係る今回のGPS距離を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記GPS距離算出ステップによって今回算出された上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する第1評価値算出ステップと、
前回検出の既存候補道路に加え前回未検出の新規候補道路が上記候補道路検出ステップによって今回検出された場合であって、かつ、上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると上記基準距離判定ステップによって判定された場合に、上記評価式に上記既存候補道路に係る今回のGPS距離に代えて上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する第2評価値算出ステップと、
上記第1評価値算出ステップまたは上記第2評価値算出ステップよって算出される上記評価値が最も高い上記候補道路上に上記車両位置を更新する車両位置更新ステップとを備える車両位置更新方法。
【請求項1】
道路情報を含む地図データに基づいてディスプレイ画面に地図を描画するとともに、車両位置を示す車両位置マークを上記地図上に表示するナビゲーション装置であって、
都度測定される車両の測定位置に基づいて、上記車両位置を更新すべき候補である候補道路を都度検出する候補道路検出部と、
GPSを用いて都度測定される車両の測定位置であるGPS位置と上記候補道路検出部によって都度検出される上記候補道路との距離を上記候補道路に係るGPS距離として都度算出するGPS距離算出部と、
上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合に、上記GPS距離算出部が前回算出した上記既存候補道路に係る前回のGPS距離と上記GPS距離算出部が今回算出した上記既存候補道路に係る今回のGPS距離との差が基準距離以下であるか否かを判定する基準距離判定部と、
上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下でないと判定した場合に、上記GPS距離を変数として含む式であって上記GPS距離が短ければ短いほど高い評価値を算出する評価式に上記既存候補道路に係る今回のGPS距離を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記GPS距離算出部が今回算出した上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する一方、上記候補道路検出部が前回検出の既存候補道路に加え前回未検出の新規候補道路を今回検出した場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると判定した場合には、上記評価式に上記既存候補道路に係る今回のGPS距離に代えて上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する評価値算出部と、
上記評価値算出部よって算出される上記評価値が最も高い上記候補道路上に上記車両位置を更新する車両位置更新部とを備えることを特徴とするナビゲーション装置。
【請求項2】
上記評価値算出部は、更に、上記既存候補道路に係る前回のGPS距離に代えて上記既存候補道路に係る前々回のGPS距離と上記既存候補道路に係る前回のGPS距離との差を上記評価式に代入して算出した上記評価値が最も高かった場合であって、かつ、上記基準距離判定部が上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると判定した場合には、上記評価値が最も高かった最高評価既存候補道路に係る今回のGPS距離に代えて上記最高評価既存候補道路に係る前回のGPS距離と上記最高評価既存候補道路に係る今回のGPS距離との差を上記評価式に代入して上記最高評価既存候補道路に係る上記評価値を算出することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
車両の位置を都度測定する測定ステップと、
上記測定ステップによって都度測定される車両の測定位置に基づいて、上記車両位置を更新すべき候補である候補道路を都度検出する候補道路検出ステップと、
GPSを用いて都度測定される車両の測定位置であるGPS位置と上記候補道路検出ステップによって都度検出される上記候補道路との距離を上記候補道路に係るGPS距離として都度算出するGPS距離算出ステップと、
上記候補道路検出ステップによって前回検出された既存候補道路が今回も検出された場合に、上記GPS距離算出ステップによって前回算出された上記既存候補道路に係る前回のGPS距離と上記GPS距離算出ステップによって今回算出された上記既存候補道路に係る今回のGPS距離との差が基準距離以下であるか否かを判定する基準距離判定ステップと、
前回検出の既存候補道路に加え前回未検出の新規候補道路が上記候補道路検出ステップによって今回検出された場合であって、かつ、上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下でないと上記基準距離判定ステップによって判定された場合に、上記GPS距離を変数として含む式であって上記GPS距離が短ければ短いほど高い評価値を算出する評価式に上記既存候補道路に係る今回のGPS距離を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記GPS距離算出ステップによって今回算出された上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する第1評価値算出ステップと、
前回検出の既存候補道路に加え前回未検出の新規候補道路が上記候補道路検出ステップによって今回検出された場合であって、かつ、上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差が上記基準距離以下であると上記基準距離判定ステップによって判定された場合に、上記評価式に上記既存候補道路に係る今回のGPS距離に代えて上記既存候補道路に係る前回のGPS距離と上記既存候補道路に係る今回のGPS距離との差を代入して上記既存候補道路に係る上記評価値を算出するとともに、上記評価式に上記新規候補道路に係る今回のGPS距離を代入して上記新規候補道路に係る上記評価値を算出する第2評価値算出ステップと、
上記第1評価値算出ステップまたは上記第2評価値算出ステップよって算出される上記評価値が最も高い上記候補道路上に上記車両位置を更新する車両位置更新ステップとを備える車両位置更新方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−287926(P2009−287926A)
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願番号】特願2008−137518(P2008−137518)
【出願日】平成20年5月27日(2008.5.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願日】平成20年5月27日(2008.5.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]