
ナビゲーション装置および車両位置確定方法
【課題】ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止することが可能な「ナビゲーション装置および車両位置確定方法」を提供する。
【解決手段】車両の回転角度を検出する角度センサ5aの出力信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θと同じ角度をランダバウトの中心角∠A’OB’とするような点B’をマッチングポイントとして求める。このように、距離センサ5bにより検出される距離情報は用いず、回転角度変化量θを利用してマップマッチングを行うことにより、距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようにする。
【解決手段】車両の回転角度を検出する角度センサ5aの出力信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θと同じ角度をランダバウトの中心角∠A’OB’とするような点B’をマッチングポイントとして求める。このように、距離センサ5bにより検出される距離情報は用いず、回転角度変化量θを利用してマップマッチングを行うことにより、距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置および車両位置確定方法に関し、特に、自立航法センサによる測位位置に基づき表示される車両位置マークを道路上に表示されるように適宜修正するマップマッチング機能を備えたナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、ナビゲーション装置では、車両の現在位置に応じた地図データを記録媒体から読み出して画面上に表示する。また、画面上の所定箇所に自車位置を示す車両位置マークを重ね合わせて表示する。そして、車両の移動により現在位置が変化するに従って、画面上で車両位置マークを移動したり、車両位置マークは画面上の所定箇所に固定してその近傍の地図データをスクロールしたりすることにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置において、車両の現在位置を測定することは不可欠である。このため、車両に搭載した距離センサおよび角度センサを用いて車両の相対位置を測定する測定法(自立航法)と、複数のGPS(Global Positioning System)衛星から送られてくる電波を受信してn次元測位処理によって車両の絶対位置を測定する測定法(衛星航法)とが実用化されている。
【0004】
自立航法による車両位置測定は、距離センサにより検出される距離情報と角度センサにより検出される車両の角度情報とを用いて車両位置を測定する方法である。この方法では、比較的低コストで車両位置を測定できるが、高精度に位置測定ができない問題があり、マップマッチング等の補正処理が必要になる。すなわち、自立航法では、車両が走行するにつれて誤差が累積し、車両位置マークが地図の道路上から外れてしまう。そこで、マップマッチング処理によって車両位置を道路データと照合して道路上に修正する。
【0005】
マップマッチングの方法は種々提案されている。例えば、パターンマッチング法と投影法とが存在する。前者のパターンマッチング法は、車両の走行軌跡(所定走行距離毎の位置と方位)を保存しておき、その走行軌跡と同形の地図上の道路を求め、当該道路上のポイントに車両位置マークをマップマッチングさせる方法である。また、後者の投影法は、自立航法センサにより測定された自車位置から所定の条件下で投影し得る道路上のポイントを探し、そのポイントに車両位置マークをマップマッチングさせる方法である。
【0006】
ところで、主に欧米でよく見かけられる道路システムの1つにランダバウト(Roundabout:ロータリーやトラフィックサークル、環状交差点とも呼ばれる)が存在する。このランダバウトは、閉じた環状経路に対して複数の進入路と複数の退出路とが接続されて構成されており、その大きさ(環状経路の最大直径や道幅)はまちまちである。このようなランダバウトでは、道路データの精度が悪く、実際のランダバウト(走行軌跡)と道路リンクとの誤差が大きくなることが多い。そのため、自立航法により測定された車両位置が地図データの道路上から外れてしまうことが多い。
【0007】
このようなランダバウト上でもマップマッチングが行われるが、従来のパターンマッチング法や投影法ではランダバウト上でのマッチング精度が悪く、車両位置マークをランダバウトの道路上にうまく位置修正できないことが多いという問題があった。これは、走行している車両の角度情報に加えて距離情報も用いてマップマッチングを行っているために、道路リンクと実際の道路との間に大きさ(距離)の差があるランダバウト上では位置の合わせ込みがうまくできないからである。
【0008】
なお、ランダバウト内でマップマッチングをしたがために却って自車位置がずれてしまう不都合を抑止するために、ランダバウト内ではマップマッチングを停止するようにした技術が提案されている(例えば、特許文献1参照)。しかしながら、この特許文献1に記載の技術では、ランダバウト走行中の余計な位置修正を防ぐことはできるが、車両位置マークが必ず道路上に存在することを保証できないという問題があった。
【特許文献1】特開2004−132922号公報
【0009】
また、ランダバウトへの進入道路と脱出道路との間の角度を車両回転角度θtとして計算し、ランダバウトにおける車両の残回転角度θを示す角度計を地図に重ねて表示することにより、ランダバウトにおける脱出通路の案内を分かりやすく行えるようにした技術も提案されている(例えば、特許文献2参照)。しかしながら、この特許文献2に記載の技術では、車両の残回転角度θを画面表示するだけで、ランダバウト内でのマップマッチングの精度を上げることはできない。
【特許文献2】特開平11−248479号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、このような問題を解決するために成されたものであり、ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止できるようにすることを目的とする。
【課題を解決するための手段】
【0011】
上記した課題を解決するために、本発明では、車両の回転角度を検出する角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求め、その回転角度変化量と同じ角度を環状交差点の道路リンクで形成される環形の中心角とし、中心角に対する環形上の弧の一端を基準点とした場合に決まる弧の他端を現在の車両位置として求めるようにしている。
【発明の効果】
【0012】
上記のように構成した本発明によれば、従来のパターンマッチング法や投影法と異なり、車両の距離情報は用いず、回転角度変化量を利用してマップマッチングが行われるので、道路データの精度に影響を受けることが少なく、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるマップマッチング方法の概要を説明するための図である。また、図2は、当該マップマッチング方法を適用した本実施形態によるナビゲーション装置の全体構成例を示す図である。まず、図1を用いて本実施形態によるマップマッチング方法(車両位置確定方法)の概要を説明する。
【0014】
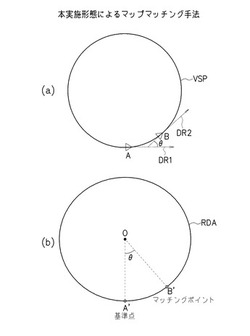
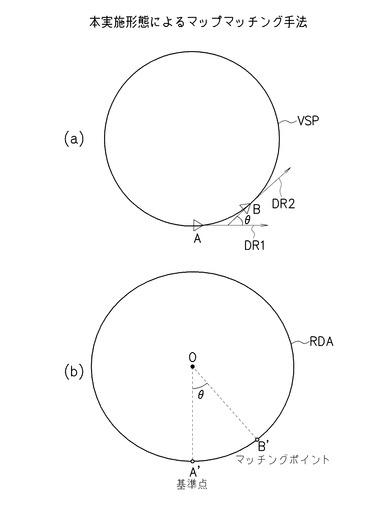
本実施形態のマップマッチングは、例えば所定の時間Δt毎に行う。図1(a)において、VSPはランダバウトにおける車両の走行軌跡(実際の道路形状)である。点Aはあるタイミングtにおける車両位置を示し、点Bはそれから所定時間Δt後のタイミング(t+Δt)における車両位置を示している。点Aおよび点Bは何れも、自立航法センサにより測定された車両位置を示している(マップマッチングにより推定された位置ではない)。
【0015】
DR1は点Aにおける車両方位を示し、DR2は点Bにおける車両方位を示している。θは本発明による「車両の回転角度変化量」に相当するものであり、点Aにおける車両方位DR1と点Bにおける車両方位DR2との差に相当する角度である。後述する本実施形態のマップマッチング処理部15aは、ランダバウト内でマップマッチング処理を行う際に、まず車両の回転角度変化量θを算出する。
【0016】
図1(b)において、RDAはランダバウトを表す環状経路の道路リンクである。なお、後述するように、ランダバウトに関する地図データは、実際には20〜30個程度の道路リンクを環状に接続したものとして構成されており、各々の道路リンクは直線で形成されている。しかし、ここでは説明を分かりやすくするために、ランダバウトの道路リンク全体を曲線で表現している。
【0017】
図1(a)に示す走行軌跡VSPと図1(b)に示すランダバウトリンクRDAとを比較すると分かるように、地図データの精度が良くなく、ランダバウトリンクRDAの形状が走行軌跡VSPの形状と一致していない。そのため、走行軌跡VSPの位置(点Aや点B)にそのまま車両位置マークを表示すると、車両位置マークが地図画面の道路上から外れてしまう。そこで、マップマッチングによって車両位置をランダバウトリンクRDA上に修正する必要がある。
【0018】
本実施形態では、この位置修正を以下のようにして行う。まず、上述のようにして回転角度変化量θを求めた後に、ランダバウトリンクRDAで形成される環形の中心点Oを求める。例えば、地図データ中に含まれる接続ノードテーブル情報(後述する)に基づいて、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度を調べ、経緯度の最高点と最低点との平均値を中心点Oの座標として求める。
【0019】
次に、車両の走行軌跡VSP上の点Aに対応するランダバウトリンクRDA上の点A’を基準点として定める。点Aに対応する基準点A’は、例えばランダバウトへの進入リンク(図示せず)とランダバウトリンクRDAとの接点とする。この場合、点Aにおける車両方位DR1(これを基準方位と呼ぶ)は、角度センサにより測定された方位としても良いし、基準点A’に繋がるランダバウトリンクRDAの1本目の道路リンクの方向としても良い。
【0020】
さらに、図1(a)のようにして求めた回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とするような点B’を求める。すなわち、ランダバウトリンクRDA上の基準点A’を弧の一端、当該弧の他端を点B’とするような中心角∠A’OB’を回転角度変化量θと同じ大きさにとり、その場合の点B’を現在の車両位置(マッチングポイント)として求める。
【0021】
なお、点B’から更に所定時間Δtを経過した後のタイミング(t+2Δt)における車両位置(マッチングポイント)も、以上と同様の演算によって求めることができる。その際に基準点は、点A’(ランダバウトリンクRDAに繋がる進入リンクの端点)に固定しておいても良いし、点B’(前回の車両位置(マッチングポイント))としても良い。点A’を基準点とする場合の基準方位はDR1となり、点B’を基準点とする場合の基準方位はDR2となる。
【0022】
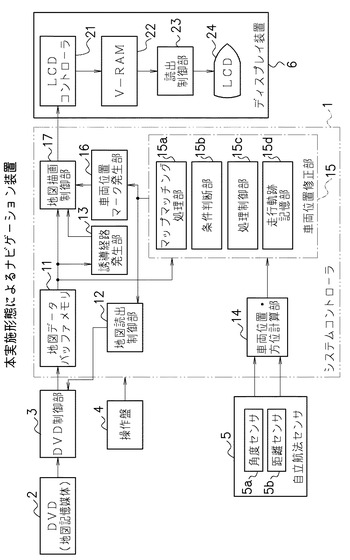
次に、以上のようなマップマッチング手法を実現する本実施形態によるナビゲーション装置の構成について、図2を用いて説明する。図2において、1はシステムコントローラであり、ナビゲーション装置の全体を制御する。このシステムコントローラ1は、CPU、ROM、RAM等を備えたマイクロコンピュータ等により構成され、地図や車両位置マークの描画処理、誘導経路探索処理、マップマッチング処理等を行う。
【0023】
2は地図データを記憶する地図記憶媒体であり、例えばDVD(Digital Versatile Disk)により構成される。DVD2には、地図表示や経路探索などに必要な各種の地図データが記憶されている。なお、ここでは地図データを記憶する記憶媒体としてDVD2を用いているが、CD−ROM、ハードディスク、半導体メモリなどの他の記憶媒体を用いても良い。3はDVD制御部であり、DVD2からの地図情報の読み取りを制御する。
【0024】
ここで、DVD2に記録された地図データの詳細について説明する。DVD2に記録された地図データは、広い地域を一望するための上位レベルの地図から、狭い地域を詳細に記述した下位レベルの地図まで、レベルと呼ばれる単位に階層化して管理されている。各レベルは、所定の経度および緯度で区切られた区画と呼ばれる矩形領域を単位として分割されている。各区画の地図データは、区画番号を指定することにより特定され、読み出すことが可能となる。
【0025】
区画ごとの地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路探索、経路案内等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。
【0026】
上述の道路ユニットは、交差点や分岐など複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する道路や車線等に対応する道路リンクに関する情報とを含んでいる。すなわち、この道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクレコードとが含まれている。
【0027】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、ノードの属性フラグ、接続しているノードの数、接続ノードレコード等の情報が含まれている。ノードの正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。ノードの属性フラグは、そのノードが交差点ノードであるか否かを示す交差点ノードフラグや、他の区画との境界にあるノードであるか否かを示す隣接ノードフラグなどから成る。接続しているノードの数は、そのノードをリンクの一方端とするリンクがある場合に、各リンクの他方端を構成するノードの数を示す。接続ノードレコードは、そのノードが一方端となっている各リンクのリンク番号を、リンク本数分だけ示す。
【0028】
また、リンクレコードには、存在するリンクのそれぞれ毎に、リンクID、ノード番号1,2、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクIDは、道路を特定するために各リンクに付されたコードを示す。ノード番号1,2は、リンクの両端に位置する2つのノードを特定する番号を示し、リンクの方向を表現するときにこれを用いる。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。
【0029】
リンクのコストは、そのリンクの走行のしやすさを数値で表したものであり、誘導経路として適正の程度を数値化したものである。このコストは、例えば道路の長さや道幅、道路種別、法定速度、右折および左折、交通規制、混雑状況等々を考慮に入れて設定されている。道路属性フラグは、そのリンクに関する各種の属性を示す。例えば、そのリンクがランダバウトの一部であるか否かといった属性、そのリンクが一方通行路か双方向通行路かといった属性などを示す。道路種別フラグは、そのリンクに対応した実際の道路が高速道路であるか一般道であるかといった種別を示す。
【0030】
4は操作盤であり、リモートコントローラ(リモコン)やタッチパネル等により構成される。この操作盤4は、搭乗者がシステムコントローラ1に対して各種の情報(例えば、経路誘導の目的地)を設定したり、各種の操作(例えば、画面スクロールや地図検索、拡大/縮小、誘導経路探索など)を行ったりするための各種操作子(ボタンやジョイスティック等)を備えており、操作子の操作状態に応じた信号がシステムコントローラ1に出力される。
【0031】
5は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)5aと、所定走行距離毎に1個のパルスを出力する距離センサ5bとを備えている。自立航法センサ5は、これらの角度センサ5aおよび距離センサ5bによって車両の相対位置および方位を検出し、その情報をシステムコントローラ1に出力する。
【0032】
6はディスプレイ装置であり、システムコントローラ1から出力される画像データに基づいて、自車周辺の地図情報を車両位置マークや各種ランドマーク等と共に表示したり、この地図上に走行軌跡や誘導経路を表示したり、車両の位置が誘導経路の案内交差点近傍に近づいたときに交差点拡大図を表示したりする。このディスプレイ装置6は、LCDコントローラ21、ビデオRAM(V−RAM)22、読出制御部23およびLCD24を備えている。
【0033】
次に、システムコントローラ1の詳細な構成について説明する。11は地図データバッファメモリであり、DVD2から読み出された地図データを一時的に格納するためのものである。12は地図読出制御部であり、DVD2から地図データを読み出す際の制御を行う。この地図読出制御部12は、車両位置修正部15からマップマッチング処理後の車両現在位置の情報を入力し、その車両現在位置を含む所定範囲の地図データをDVD2から読み出して地図データバッファメモリ11に格納する。
【0034】
13は誘導経路発生部であり、地図データバッファメモリ11に格納された地図データを用いて、出発地から目的地までを結ぶ最もコストが小さな誘導経路を探索し、当該探索した誘導経路のデータを記憶する。誘導経路のデータは、出発地から目的地まで至る各ノードに対応させて、各ノードの位置と、各ノードが交差点か否かを表す交差点識別フラグとを記憶したものである。
【0035】
この誘導経路発生部13はさらに、上記記憶した誘導経路のデータを用いて、誘導経路の描画データを発生する。すなわち、上記記憶した誘導経路データの中から、その時点でV−RAM22に描画された地図エリアに含まれるものを選択的に読み出し、地図画像に重ねて他の道路と異なる所定色で太く強調した誘導経路を描画する。また、自車が誘導経路前方にある案内交差点から所定距離以内に接近したときに、所定の交差点拡大図データに基づいて、接近中の案内交差点の案内画像を生成して出力する。
【0036】
14は車両位置・方位計算部であり、自立航法センサ5から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。
【0037】
15は車両位置修正部であり、マップマッチング処理部15a、条件判断部15b、処理制御部15cおよび走行軌跡記憶部15dを備えている。走行軌跡記憶部15dは、車両位置・方位計算部14より出力されるデータに基づいて、所定時間Δt毎の車両位置と車両方位とを走行軌跡として記憶する。
【0038】
マップマッチング処理部15aは、地図データバッファメモリ11に読み出されている地図データと、走行軌跡記憶部15dに記憶された走行軌跡データ(車両位置・方位計算部14により計算された推定車両位置および車両方位のデータ)とを用いて、所定時間毎あるいは所定走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0039】
具体的には、マップマッチング処理部15aは、角度センサ5aの出力に基づき車両位置・方位計算部14により所定時間Δt毎に計算された絶対的な車両方位の信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求める。そして、その回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とし、当該中心角∠A’OB’に対する環形上の弧の一端A’を基準点とした場合に決まる弧の他端B’を、現在の車両位置(マッチングポイント)として求める。このようにマップマッチング処理部15aは、本発明の車両角度変化量演算部および車両位置演算部を機能として備えている。
【0040】
条件判断部15bは、地図データバッファメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された推定車両位置のデータとに基づいて、自車位置がランダバウト内にあるか否かを判定する。具体的には、車両位置・方位計算部14により計算された自車位置が存在する道路リンクの道路属性フラグに対してランダバウト属性情報が格納されているか否かを判定し、格納されている場合に、自車位置がランダバウト内にあると判断する。
【0041】
条件判断部15bは、自車位置がランダバウト内にあると判断した場合には、更に次の(a)〜(d)ような判定も行う。
(a)道路属性フラグに基づいて、ランダバウトが一方通行路か双方向通行路かを判定する。
(b)地図データに基づいてランダバウトの最大半径を求め、その最大半径が第1のしきい値Th1(例えば、30メートル)以上か否かを判定する。ランダバウトの最大半径は、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度から計算することができる。
【0042】
(c)地図データに基づいてランダバウトの最小半径を求め、その最小半径が第2のしきい値Th2(例えば、150メートル)以下か否かを判定する。ランダバウトの最小半径も、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度から計算することができる。
(d)地図データに基づいてランダバウトの最大半径と最小半径を求め、その最大半径が最小半径の所定倍(例えば、1.5倍)以下か否かを判定する。
このように、条件判断部15bは、本発明の双方向通行判定部、最大半径演算部、最小半径演算部、半径演算部を機能として備えている。
【0043】
処理制御部15cは、条件判断部15bにより自車位置がランダバウト内にあると判断された場合にのみ、回転角度変化量θを用いたマップマッチング処理を行うようにマップマッチング処理部15aを制御する。処理制御部15cは、自車位置がランダバウト内にないと判断した場合には、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。
【0044】
また、処理制御部15cは、条件判断部15bにより自車位置がランダバウト内にあると判断された場合でも、次の(A)〜(D)の場合には回転角度変化量θを用いたマップマッチング処理を行わず、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。このように処理制御部15cは、本発明の制御部を構成する。
【0045】
(A)条件判断部15bによりランダバウトが双方向通行路であると判断されたとき。
(B)条件判断部15bによりランダバウトの最大半径が第1のしきい値Th1以下であると判断されたとき(ランダバウトが小さすぎるとき)。
(C)条件判断部15bによりランダバウトの最小半径が第2のしきい値Th2以上であると判断されたとき(ランダバウトが大きすぎるとき)。
(D)条件判断部15bによりランダバウトの最大半径が最小半径の所定倍以上であると判断されたとき(ランダバウトが真円でなくその歪みが大きいとき)。
【0046】
16は車両位置マーク発生部であり、車両位置修正部15により適宜マップマッチング処理された後の車両現在位置を入力して、マップマッチング処理部15aにより求められた自車位置に表示するための車両位置マークを発生する。17は地図描画制御部であり、地図データバッファメモリ11に格納された地図データと、誘導経路発生部13により発生された誘導経路の描画データと、車両位置マーク発生部16により発生された車両位置マーク等とに基づいて、車両位置周辺の地図を車両位置マークや誘導経路等と共にディスプレイ装置6に表示させるのに必要な地図画像データを生成する。これらの車両位置マーク発生部16および地図描画制御部17は、本発明の表示制御部を構成する。
【0047】
地図描画制御部17によって生成された地図画像データは、LCDコントローラ21によってV−RAM22に一時的に格納される。読出制御部23は、V−RAM22からの地図画像データの読み出しを制御する。すなわち、地図描画制御部17によって生成された地図画像データはV−RAM22に一時的に格納され、読出制御部23によって1画面分の地図画像データが読み出されて、LCD24のディスプレイ画面に表示される。
【0048】
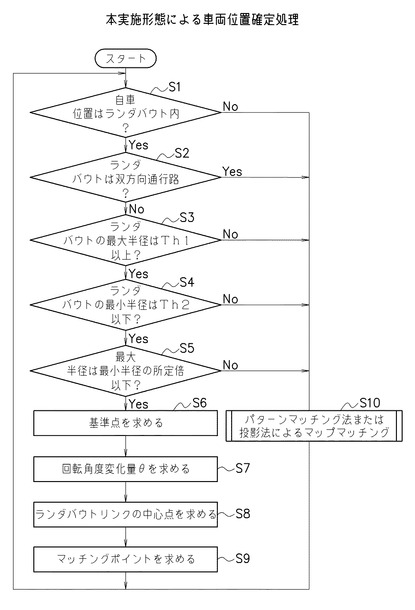
次に、上記のように構成した本実施形態のナビゲーション装置による車両位置確定動作について説明する。図3は、車両位置修正部15によって行われる車両位置確定処理の流れを示すフローチャートである。図3において、条件判断部15bは、車両位置・方位計算部14により演算された車両の現在位置と、地図データバッファメモリ11内に記憶されている地図データとに基づいて、自車位置がランダバウト内にあるか否かを判断する(ステップS1)。
【0049】
ここで、自車位置がランダバウト内にないと判断した場合には、処理制御部15cは、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。これによりマップマッチング処理部15aは、パターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行う(ステップS10)。
【0050】
一方、自車位置がランダバウト内にあると判断した場合、条件判断部15bは更に、地図データバッファメモリ11内に記憶されている地図データ中に含まれる道路属性フラグに基づいて、そのランダバウトが双方向通行路か否かを判定する(ステップS2)。ここで、ランダバウトが双方向通行路であると判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0051】
一方、ランダバウトが双方向通行路でない、つまり一方通行路であると判断された場合には、条件判断部15b更に、地図データの接続ノードレコードに含まれている各ノードの経緯度情報に基づいて、そのランダバウトの最大半径を計算し、ランダバウトの最大半径が第1のしきい値Th1以上か否かを判定する(ステップS3)。ここで、ランダバウトの最大半径が第1のしきい値Th1以上でないと判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0052】
一方、ランダバウトの最大半径が第1のしきい値Th1以上であると判断された場合には、条件判断部15b更に、地図データの接続ノードレコードに含まれている各ノードの経緯度情報に基づいて、そのランダバウトの最小半径を計算し、ランダバウトの最小半径が第2のしきい値Th2以下か否かを判定する(ステップS4)。ここで、ランダバウトの最小半径が第2のしきい値Th2以下でないと判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0053】
一方、ランダバウトの最小半径が第2のしきい値Th2以下であると判断された場合には、条件判断部15b更に、ステップS3で計算したランダバウトの最大半径が、ステップS4で計算した最小半径の所定倍以下であるか否かを判定する(ステップS5)。ここで、ランダバウトの最大半径が最小半径の所定倍以上であると判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0054】
以上のステップS1〜S5の条件を全てクリアした場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づいて、回転角度変化量θを用いたマップマッチング処理を以下のように行う。すなわち、マップマッチング処理部15aは、まず基準点A’を定める(ステップS6)。例えば、車両がランダバウトへ進入したタイミングtで、ランダバウトへの進入リンクとランダバウトリンクRDAとの接点を基準点A’として定める。
【0055】
次に、マップマッチング処理部15aは、走行軌跡記憶部15dに所定時間Δt毎の走行軌跡として記憶されている車両位置および車両方位のデータに基づいて、タイミングtの時点で車両がランダバウトに進入した地点Aにおける車両方位DR1(例えば、基準点A’に繋がるランダバウトの1本目の道路リンクの方向)と、それから所定時間Δt後のタイミング(t+Δt)に車両が存在する地点Bにおける車両方位DR2との差を回転角度変化量θとして求める(ステップS7)。
【0056】
さらに、マップマッチング処理部15aは、ランダバウトリンクRDAで形成される環形の中心点Oを求める(ステップS8)。例えば、地図データ中に含まれる接続ノードテーブル情報に基づいて、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度を調べ、経緯度の最高点と最低点との平均値を中心点Oの座標とする。
【0057】
そして、マップマッチング処理部15aは、ステップS7で求めた回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とするような点B’を求める(ステップS9)。すなわち、ランダバウトリンクRDA上の基準点A’を弧の一端、当該弧の他端を点B’とするような中心角∠A’OB’を回転角度変化量θと同じ大きさにとり、その場合の点B’を現在の車両位置(マッチングポイント)として求める。
【0058】
上記ステップS9またはステップS10の処理の後は、ステップS1に戻る。そして、車両がランダバウト内にいる間はステップS6〜S9の処理によってマップマッチングを行い、ランダバウトから脱出するとステップS10の処理によってマップマッチングを行う。なお、上述したように、点B’から更に所定時間Δtを経過した後のタイミング(t+2Δt)におけるマッチングポイントを求める際に、ステップS6では、基準点を点A’に固定しておいても良いし、点B’としても良い。
【0059】
以上詳しく説明したように、本実施形態によれば、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θから現在の車両位置(マッチングポイント)を求めるようにしたので、距離センサ5bにより検出される距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようになる。
【0060】
なお、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0061】
本発明は、自立航法センサによる測位位置に基づき表示される車両位置マークを道路上に表示されるように適宜修正するマップマッチング機能を備えたナビゲーション装置に有用である。
【図面の簡単な説明】
【0062】
【図1】本実施形態による車両位置確定方法の概要を説明するための図である。
【図2】本実施形態によるナビゲーション装置の構成例を示す図である。
【図3】本実施形態の車両位置修正部によって行われる車両位置確定処理の流れを示すフローチャートである。
【符号の説明】
【0063】
5a 角度センサ
15 車両位置修正部
15a マップマッチング処理部
15b 条件判断部
15c 処理制御部
15d 走行軌跡記憶部
16 車両位置マーク発生部
17 地図描画制御部
【技術分野】
【0001】
本発明は、ナビゲーション装置および車両位置確定方法に関し、特に、自立航法センサによる測位位置に基づき表示される車両位置マークを道路上に表示されるように適宜修正するマップマッチング機能を備えたナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、ナビゲーション装置では、車両の現在位置に応じた地図データを記録媒体から読み出して画面上に表示する。また、画面上の所定箇所に自車位置を示す車両位置マークを重ね合わせて表示する。そして、車両の移動により現在位置が変化するに従って、画面上で車両位置マークを移動したり、車両位置マークは画面上の所定箇所に固定してその近傍の地図データをスクロールしたりすることにより、車両が現在どこを走行しているのかを一目で分かるようにしている。
【0003】
この種のナビゲーション装置において、車両の現在位置を測定することは不可欠である。このため、車両に搭載した距離センサおよび角度センサを用いて車両の相対位置を測定する測定法(自立航法)と、複数のGPS(Global Positioning System)衛星から送られてくる電波を受信してn次元測位処理によって車両の絶対位置を測定する測定法(衛星航法)とが実用化されている。
【0004】
自立航法による車両位置測定は、距離センサにより検出される距離情報と角度センサにより検出される車両の角度情報とを用いて車両位置を測定する方法である。この方法では、比較的低コストで車両位置を測定できるが、高精度に位置測定ができない問題があり、マップマッチング等の補正処理が必要になる。すなわち、自立航法では、車両が走行するにつれて誤差が累積し、車両位置マークが地図の道路上から外れてしまう。そこで、マップマッチング処理によって車両位置を道路データと照合して道路上に修正する。
【0005】
マップマッチングの方法は種々提案されている。例えば、パターンマッチング法と投影法とが存在する。前者のパターンマッチング法は、車両の走行軌跡(所定走行距離毎の位置と方位)を保存しておき、その走行軌跡と同形の地図上の道路を求め、当該道路上のポイントに車両位置マークをマップマッチングさせる方法である。また、後者の投影法は、自立航法センサにより測定された自車位置から所定の条件下で投影し得る道路上のポイントを探し、そのポイントに車両位置マークをマップマッチングさせる方法である。
【0006】
ところで、主に欧米でよく見かけられる道路システムの1つにランダバウト(Roundabout:ロータリーやトラフィックサークル、環状交差点とも呼ばれる)が存在する。このランダバウトは、閉じた環状経路に対して複数の進入路と複数の退出路とが接続されて構成されており、その大きさ(環状経路の最大直径や道幅)はまちまちである。このようなランダバウトでは、道路データの精度が悪く、実際のランダバウト(走行軌跡)と道路リンクとの誤差が大きくなることが多い。そのため、自立航法により測定された車両位置が地図データの道路上から外れてしまうことが多い。
【0007】
このようなランダバウト上でもマップマッチングが行われるが、従来のパターンマッチング法や投影法ではランダバウト上でのマッチング精度が悪く、車両位置マークをランダバウトの道路上にうまく位置修正できないことが多いという問題があった。これは、走行している車両の角度情報に加えて距離情報も用いてマップマッチングを行っているために、道路リンクと実際の道路との間に大きさ(距離)の差があるランダバウト上では位置の合わせ込みがうまくできないからである。
【0008】
なお、ランダバウト内でマップマッチングをしたがために却って自車位置がずれてしまう不都合を抑止するために、ランダバウト内ではマップマッチングを停止するようにした技術が提案されている(例えば、特許文献1参照)。しかしながら、この特許文献1に記載の技術では、ランダバウト走行中の余計な位置修正を防ぐことはできるが、車両位置マークが必ず道路上に存在することを保証できないという問題があった。
【特許文献1】特開2004−132922号公報
【0009】
また、ランダバウトへの進入道路と脱出道路との間の角度を車両回転角度θtとして計算し、ランダバウトにおける車両の残回転角度θを示す角度計を地図に重ねて表示することにより、ランダバウトにおける脱出通路の案内を分かりやすく行えるようにした技術も提案されている(例えば、特許文献2参照)。しかしながら、この特許文献2に記載の技術では、車両の残回転角度θを画面表示するだけで、ランダバウト内でのマップマッチングの精度を上げることはできない。
【特許文献2】特開平11−248479号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、このような問題を解決するために成されたものであり、ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止できるようにすることを目的とする。
【課題を解決するための手段】
【0011】
上記した課題を解決するために、本発明では、車両の回転角度を検出する角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求め、その回転角度変化量と同じ角度を環状交差点の道路リンクで形成される環形の中心角とし、中心角に対する環形上の弧の一端を基準点とした場合に決まる弧の他端を現在の車両位置として求めるようにしている。
【発明の効果】
【0012】
上記のように構成した本発明によれば、従来のパターンマッチング法や投影法と異なり、車両の距離情報は用いず、回転角度変化量を利用してマップマッチングが行われるので、道路データの精度に影響を受けることが少なく、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるマップマッチング方法の概要を説明するための図である。また、図2は、当該マップマッチング方法を適用した本実施形態によるナビゲーション装置の全体構成例を示す図である。まず、図1を用いて本実施形態によるマップマッチング方法(車両位置確定方法)の概要を説明する。
【0014】
本実施形態のマップマッチングは、例えば所定の時間Δt毎に行う。図1(a)において、VSPはランダバウトにおける車両の走行軌跡(実際の道路形状)である。点Aはあるタイミングtにおける車両位置を示し、点Bはそれから所定時間Δt後のタイミング(t+Δt)における車両位置を示している。点Aおよび点Bは何れも、自立航法センサにより測定された車両位置を示している(マップマッチングにより推定された位置ではない)。
【0015】
DR1は点Aにおける車両方位を示し、DR2は点Bにおける車両方位を示している。θは本発明による「車両の回転角度変化量」に相当するものであり、点Aにおける車両方位DR1と点Bにおける車両方位DR2との差に相当する角度である。後述する本実施形態のマップマッチング処理部15aは、ランダバウト内でマップマッチング処理を行う際に、まず車両の回転角度変化量θを算出する。
【0016】
図1(b)において、RDAはランダバウトを表す環状経路の道路リンクである。なお、後述するように、ランダバウトに関する地図データは、実際には20〜30個程度の道路リンクを環状に接続したものとして構成されており、各々の道路リンクは直線で形成されている。しかし、ここでは説明を分かりやすくするために、ランダバウトの道路リンク全体を曲線で表現している。
【0017】
図1(a)に示す走行軌跡VSPと図1(b)に示すランダバウトリンクRDAとを比較すると分かるように、地図データの精度が良くなく、ランダバウトリンクRDAの形状が走行軌跡VSPの形状と一致していない。そのため、走行軌跡VSPの位置(点Aや点B)にそのまま車両位置マークを表示すると、車両位置マークが地図画面の道路上から外れてしまう。そこで、マップマッチングによって車両位置をランダバウトリンクRDA上に修正する必要がある。
【0018】
本実施形態では、この位置修正を以下のようにして行う。まず、上述のようにして回転角度変化量θを求めた後に、ランダバウトリンクRDAで形成される環形の中心点Oを求める。例えば、地図データ中に含まれる接続ノードテーブル情報(後述する)に基づいて、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度を調べ、経緯度の最高点と最低点との平均値を中心点Oの座標として求める。
【0019】
次に、車両の走行軌跡VSP上の点Aに対応するランダバウトリンクRDA上の点A’を基準点として定める。点Aに対応する基準点A’は、例えばランダバウトへの進入リンク(図示せず)とランダバウトリンクRDAとの接点とする。この場合、点Aにおける車両方位DR1(これを基準方位と呼ぶ)は、角度センサにより測定された方位としても良いし、基準点A’に繋がるランダバウトリンクRDAの1本目の道路リンクの方向としても良い。
【0020】
さらに、図1(a)のようにして求めた回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とするような点B’を求める。すなわち、ランダバウトリンクRDA上の基準点A’を弧の一端、当該弧の他端を点B’とするような中心角∠A’OB’を回転角度変化量θと同じ大きさにとり、その場合の点B’を現在の車両位置(マッチングポイント)として求める。
【0021】
なお、点B’から更に所定時間Δtを経過した後のタイミング(t+2Δt)における車両位置(マッチングポイント)も、以上と同様の演算によって求めることができる。その際に基準点は、点A’(ランダバウトリンクRDAに繋がる進入リンクの端点)に固定しておいても良いし、点B’(前回の車両位置(マッチングポイント))としても良い。点A’を基準点とする場合の基準方位はDR1となり、点B’を基準点とする場合の基準方位はDR2となる。
【0022】
次に、以上のようなマップマッチング手法を実現する本実施形態によるナビゲーション装置の構成について、図2を用いて説明する。図2において、1はシステムコントローラであり、ナビゲーション装置の全体を制御する。このシステムコントローラ1は、CPU、ROM、RAM等を備えたマイクロコンピュータ等により構成され、地図や車両位置マークの描画処理、誘導経路探索処理、マップマッチング処理等を行う。
【0023】
2は地図データを記憶する地図記憶媒体であり、例えばDVD(Digital Versatile Disk)により構成される。DVD2には、地図表示や経路探索などに必要な各種の地図データが記憶されている。なお、ここでは地図データを記憶する記憶媒体としてDVD2を用いているが、CD−ROM、ハードディスク、半導体メモリなどの他の記憶媒体を用いても良い。3はDVD制御部であり、DVD2からの地図情報の読み取りを制御する。
【0024】
ここで、DVD2に記録された地図データの詳細について説明する。DVD2に記録された地図データは、広い地域を一望するための上位レベルの地図から、狭い地域を詳細に記述した下位レベルの地図まで、レベルと呼ばれる単位に階層化して管理されている。各レベルは、所定の経度および緯度で区切られた区画と呼ばれる矩形領域を単位として分割されている。各区画の地図データは、区画番号を指定することにより特定され、読み出すことが可能となる。
【0025】
区画ごとの地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路探索、経路案内等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。
【0026】
上述の道路ユニットは、交差点や分岐など複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する道路や車線等に対応する道路リンクに関する情報とを含んでいる。すなわち、この道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクレコードとが含まれている。
【0027】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、ノードの属性フラグ、接続しているノードの数、接続ノードレコード等の情報が含まれている。ノードの正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。ノードの属性フラグは、そのノードが交差点ノードであるか否かを示す交差点ノードフラグや、他の区画との境界にあるノードであるか否かを示す隣接ノードフラグなどから成る。接続しているノードの数は、そのノードをリンクの一方端とするリンクがある場合に、各リンクの他方端を構成するノードの数を示す。接続ノードレコードは、そのノードが一方端となっている各リンクのリンク番号を、リンク本数分だけ示す。
【0028】
また、リンクレコードには、存在するリンクのそれぞれ毎に、リンクID、ノード番号1,2、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクIDは、道路を特定するために各リンクに付されたコードを示す。ノード番号1,2は、リンクの両端に位置する2つのノードを特定する番号を示し、リンクの方向を表現するときにこれを用いる。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。
【0029】
リンクのコストは、そのリンクの走行のしやすさを数値で表したものであり、誘導経路として適正の程度を数値化したものである。このコストは、例えば道路の長さや道幅、道路種別、法定速度、右折および左折、交通規制、混雑状況等々を考慮に入れて設定されている。道路属性フラグは、そのリンクに関する各種の属性を示す。例えば、そのリンクがランダバウトの一部であるか否かといった属性、そのリンクが一方通行路か双方向通行路かといった属性などを示す。道路種別フラグは、そのリンクに対応した実際の道路が高速道路であるか一般道であるかといった種別を示す。
【0030】
4は操作盤であり、リモートコントローラ(リモコン)やタッチパネル等により構成される。この操作盤4は、搭乗者がシステムコントローラ1に対して各種の情報(例えば、経路誘導の目的地)を設定したり、各種の操作(例えば、画面スクロールや地図検索、拡大/縮小、誘導経路探索など)を行ったりするための各種操作子(ボタンやジョイスティック等)を備えており、操作子の操作状態に応じた信号がシステムコントローラ1に出力される。
【0031】
5は自立航法センサであり、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)5aと、所定走行距離毎に1個のパルスを出力する距離センサ5bとを備えている。自立航法センサ5は、これらの角度センサ5aおよび距離センサ5bによって車両の相対位置および方位を検出し、その情報をシステムコントローラ1に出力する。
【0032】
6はディスプレイ装置であり、システムコントローラ1から出力される画像データに基づいて、自車周辺の地図情報を車両位置マークや各種ランドマーク等と共に表示したり、この地図上に走行軌跡や誘導経路を表示したり、車両の位置が誘導経路の案内交差点近傍に近づいたときに交差点拡大図を表示したりする。このディスプレイ装置6は、LCDコントローラ21、ビデオRAM(V−RAM)22、読出制御部23およびLCD24を備えている。
【0033】
次に、システムコントローラ1の詳細な構成について説明する。11は地図データバッファメモリであり、DVD2から読み出された地図データを一時的に格納するためのものである。12は地図読出制御部であり、DVD2から地図データを読み出す際の制御を行う。この地図読出制御部12は、車両位置修正部15からマップマッチング処理後の車両現在位置の情報を入力し、その車両現在位置を含む所定範囲の地図データをDVD2から読み出して地図データバッファメモリ11に格納する。
【0034】
13は誘導経路発生部であり、地図データバッファメモリ11に格納された地図データを用いて、出発地から目的地までを結ぶ最もコストが小さな誘導経路を探索し、当該探索した誘導経路のデータを記憶する。誘導経路のデータは、出発地から目的地まで至る各ノードに対応させて、各ノードの位置と、各ノードが交差点か否かを表す交差点識別フラグとを記憶したものである。
【0035】
この誘導経路発生部13はさらに、上記記憶した誘導経路のデータを用いて、誘導経路の描画データを発生する。すなわち、上記記憶した誘導経路データの中から、その時点でV−RAM22に描画された地図エリアに含まれるものを選択的に読み出し、地図画像に重ねて他の道路と異なる所定色で太く強調した誘導経路を描画する。また、自車が誘導経路前方にある案内交差点から所定距離以内に接近したときに、所定の交差点拡大図データに基づいて、接近中の案内交差点の案内画像を生成して出力する。
【0036】
14は車両位置・方位計算部であり、自立航法センサ5から出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。
【0037】
15は車両位置修正部であり、マップマッチング処理部15a、条件判断部15b、処理制御部15cおよび走行軌跡記憶部15dを備えている。走行軌跡記憶部15dは、車両位置・方位計算部14より出力されるデータに基づいて、所定時間Δt毎の車両位置と車両方位とを走行軌跡として記憶する。
【0038】
マップマッチング処理部15aは、地図データバッファメモリ11に読み出されている地図データと、走行軌跡記憶部15dに記憶された走行軌跡データ(車両位置・方位計算部14により計算された推定車両位置および車両方位のデータ)とを用いて、所定時間毎あるいは所定走行距離毎にマップマッチング処理を行って、自車の走行位置を地図データの道路上に位置修正する。
【0039】
具体的には、マップマッチング処理部15aは、角度センサ5aの出力に基づき車両位置・方位計算部14により所定時間Δt毎に計算された絶対的な車両方位の信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求める。そして、その回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とし、当該中心角∠A’OB’に対する環形上の弧の一端A’を基準点とした場合に決まる弧の他端B’を、現在の車両位置(マッチングポイント)として求める。このようにマップマッチング処理部15aは、本発明の車両角度変化量演算部および車両位置演算部を機能として備えている。
【0040】
条件判断部15bは、地図データバッファメモリ11に読み出されている地図データと、車両位置・方位計算部14により計算された推定車両位置のデータとに基づいて、自車位置がランダバウト内にあるか否かを判定する。具体的には、車両位置・方位計算部14により計算された自車位置が存在する道路リンクの道路属性フラグに対してランダバウト属性情報が格納されているか否かを判定し、格納されている場合に、自車位置がランダバウト内にあると判断する。
【0041】
条件判断部15bは、自車位置がランダバウト内にあると判断した場合には、更に次の(a)〜(d)ような判定も行う。
(a)道路属性フラグに基づいて、ランダバウトが一方通行路か双方向通行路かを判定する。
(b)地図データに基づいてランダバウトの最大半径を求め、その最大半径が第1のしきい値Th1(例えば、30メートル)以上か否かを判定する。ランダバウトの最大半径は、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度から計算することができる。
【0042】
(c)地図データに基づいてランダバウトの最小半径を求め、その最小半径が第2のしきい値Th2(例えば、150メートル)以下か否かを判定する。ランダバウトの最小半径も、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度から計算することができる。
(d)地図データに基づいてランダバウトの最大半径と最小半径を求め、その最大半径が最小半径の所定倍(例えば、1.5倍)以下か否かを判定する。
このように、条件判断部15bは、本発明の双方向通行判定部、最大半径演算部、最小半径演算部、半径演算部を機能として備えている。
【0043】
処理制御部15cは、条件判断部15bにより自車位置がランダバウト内にあると判断された場合にのみ、回転角度変化量θを用いたマップマッチング処理を行うようにマップマッチング処理部15aを制御する。処理制御部15cは、自車位置がランダバウト内にないと判断した場合には、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。
【0044】
また、処理制御部15cは、条件判断部15bにより自車位置がランダバウト内にあると判断された場合でも、次の(A)〜(D)の場合には回転角度変化量θを用いたマップマッチング処理を行わず、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。このように処理制御部15cは、本発明の制御部を構成する。
【0045】
(A)条件判断部15bによりランダバウトが双方向通行路であると判断されたとき。
(B)条件判断部15bによりランダバウトの最大半径が第1のしきい値Th1以下であると判断されたとき(ランダバウトが小さすぎるとき)。
(C)条件判断部15bによりランダバウトの最小半径が第2のしきい値Th2以上であると判断されたとき(ランダバウトが大きすぎるとき)。
(D)条件判断部15bによりランダバウトの最大半径が最小半径の所定倍以上であると判断されたとき(ランダバウトが真円でなくその歪みが大きいとき)。
【0046】
16は車両位置マーク発生部であり、車両位置修正部15により適宜マップマッチング処理された後の車両現在位置を入力して、マップマッチング処理部15aにより求められた自車位置に表示するための車両位置マークを発生する。17は地図描画制御部であり、地図データバッファメモリ11に格納された地図データと、誘導経路発生部13により発生された誘導経路の描画データと、車両位置マーク発生部16により発生された車両位置マーク等とに基づいて、車両位置周辺の地図を車両位置マークや誘導経路等と共にディスプレイ装置6に表示させるのに必要な地図画像データを生成する。これらの車両位置マーク発生部16および地図描画制御部17は、本発明の表示制御部を構成する。
【0047】
地図描画制御部17によって生成された地図画像データは、LCDコントローラ21によってV−RAM22に一時的に格納される。読出制御部23は、V−RAM22からの地図画像データの読み出しを制御する。すなわち、地図描画制御部17によって生成された地図画像データはV−RAM22に一時的に格納され、読出制御部23によって1画面分の地図画像データが読み出されて、LCD24のディスプレイ画面に表示される。
【0048】
次に、上記のように構成した本実施形態のナビゲーション装置による車両位置確定動作について説明する。図3は、車両位置修正部15によって行われる車両位置確定処理の流れを示すフローチャートである。図3において、条件判断部15bは、車両位置・方位計算部14により演算された車両の現在位置と、地図データバッファメモリ11内に記憶されている地図データとに基づいて、自車位置がランダバウト内にあるか否かを判断する(ステップS1)。
【0049】
ここで、自車位置がランダバウト内にないと判断した場合には、処理制御部15cは、一般的なパターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行うようにマップマッチング処理部15aを制御する。これによりマップマッチング処理部15aは、パターンマッチング法および投影法の何れか一方または両方に基づきマップマッチング処理を行う(ステップS10)。
【0050】
一方、自車位置がランダバウト内にあると判断した場合、条件判断部15bは更に、地図データバッファメモリ11内に記憶されている地図データ中に含まれる道路属性フラグに基づいて、そのランダバウトが双方向通行路か否かを判定する(ステップS2)。ここで、ランダバウトが双方向通行路であると判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0051】
一方、ランダバウトが双方向通行路でない、つまり一方通行路であると判断された場合には、条件判断部15b更に、地図データの接続ノードレコードに含まれている各ノードの経緯度情報に基づいて、そのランダバウトの最大半径を計算し、ランダバウトの最大半径が第1のしきい値Th1以上か否かを判定する(ステップS3)。ここで、ランダバウトの最大半径が第1のしきい値Th1以上でないと判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0052】
一方、ランダバウトの最大半径が第1のしきい値Th1以上であると判断された場合には、条件判断部15b更に、地図データの接続ノードレコードに含まれている各ノードの経緯度情報に基づいて、そのランダバウトの最小半径を計算し、ランダバウトの最小半径が第2のしきい値Th2以下か否かを判定する(ステップS4)。ここで、ランダバウトの最小半径が第2のしきい値Th2以下でないと判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0053】
一方、ランダバウトの最小半径が第2のしきい値Th2以下であると判断された場合には、条件判断部15b更に、ステップS3で計算したランダバウトの最大半径が、ステップS4で計算した最小半径の所定倍以下であるか否かを判定する(ステップS5)。ここで、ランダバウトの最大半径が最小半径の所定倍以上であると判断された場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づきパターンマッチング法および投影法の何れか一方または両方によりマップマッチング処理を行う(ステップS10)。
【0054】
以上のステップS1〜S5の条件を全てクリアした場合には、マップマッチング処理部15aは、処理制御部15cの制御に基づいて、回転角度変化量θを用いたマップマッチング処理を以下のように行う。すなわち、マップマッチング処理部15aは、まず基準点A’を定める(ステップS6)。例えば、車両がランダバウトへ進入したタイミングtで、ランダバウトへの進入リンクとランダバウトリンクRDAとの接点を基準点A’として定める。
【0055】
次に、マップマッチング処理部15aは、走行軌跡記憶部15dに所定時間Δt毎の走行軌跡として記憶されている車両位置および車両方位のデータに基づいて、タイミングtの時点で車両がランダバウトに進入した地点Aにおける車両方位DR1(例えば、基準点A’に繋がるランダバウトの1本目の道路リンクの方向)と、それから所定時間Δt後のタイミング(t+Δt)に車両が存在する地点Bにおける車両方位DR2との差を回転角度変化量θとして求める(ステップS7)。
【0056】
さらに、マップマッチング処理部15aは、ランダバウトリンクRDAで形成される環形の中心点Oを求める(ステップS8)。例えば、地図データ中に含まれる接続ノードテーブル情報に基づいて、ランダバウトリンクRDAを構成する複数の道路リンクの各端点に位置する全てのノードの経緯度を調べ、経緯度の最高点と最低点との平均値を中心点Oの座標とする。
【0057】
そして、マップマッチング処理部15aは、ステップS7で求めた回転角度変化量θと同じ角度をランダバウトリンクRDAで形成される環形の中心角∠A’OB’とするような点B’を求める(ステップS9)。すなわち、ランダバウトリンクRDA上の基準点A’を弧の一端、当該弧の他端を点B’とするような中心角∠A’OB’を回転角度変化量θと同じ大きさにとり、その場合の点B’を現在の車両位置(マッチングポイント)として求める。
【0058】
上記ステップS9またはステップS10の処理の後は、ステップS1に戻る。そして、車両がランダバウト内にいる間はステップS6〜S9の処理によってマップマッチングを行い、ランダバウトから脱出するとステップS10の処理によってマップマッチングを行う。なお、上述したように、点B’から更に所定時間Δtを経過した後のタイミング(t+2Δt)におけるマッチングポイントを求める際に、ステップS6では、基準点を点A’に固定しておいても良いし、点B’としても良い。
【0059】
以上詳しく説明したように、本実施形態によれば、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θから現在の車両位置(マッチングポイント)を求めるようにしたので、距離センサ5bにより検出される距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようになる。
【0060】
なお、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0061】
本発明は、自立航法センサによる測位位置に基づき表示される車両位置マークを道路上に表示されるように適宜修正するマップマッチング機能を備えたナビゲーション装置に有用である。
【図面の簡単な説明】
【0062】
【図1】本実施形態による車両位置確定方法の概要を説明するための図である。
【図2】本実施形態によるナビゲーション装置の構成例を示す図である。
【図3】本実施形態の車両位置修正部によって行われる車両位置確定処理の流れを示すフローチャートである。
【符号の説明】
【0063】
5a 角度センサ
15 車両位置修正部
15a マップマッチング処理部
15b 条件判断部
15c 処理制御部
15d 走行軌跡記憶部
16 車両位置マーク発生部
17 地図描画制御部
【特許請求の範囲】
【請求項1】
車両の回転角度を検出する角度センサと、
上記角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求める車両角度変化量演算部と、
上記車両角度変化量演算部により求められた回転角度変化量と同じ角度を上記環状交差点の道路リンクで形成される環形の中心角とし、上記中心角に対する上記環形上の弧の一端を基準点とした場合に決まる上記弧の他端を現在の車両位置として求める車両位置演算部と、
地図データに基づいて地図を画面表示するとともに、画面表示された地図上において、上記車両位置演算部により求められた現在の車両位置に車両位置マークを表示するように制御する表示制御部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記地図データに基づいて、上記環状交差点が双方向通行路か否かを判定する双方向通行判定部と、
上記双方向通行判定部により上記環状交差点が双方向通行路でないと判定されたときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記地図データに基づいて、上記環状交差点の最大半径を求める最大半径演算部と、
上記最大半径演算部により求められた最大半径が第1のしきい値以上のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
上記地図データに基づいて、上記環状交差点の最小半径を求める最小半径演算部と、
上記最小半径演算部により求められた最小半径が第2のしきい値以下のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記地図データに基づいて、上記環状交差点の最大半径および最小半径を求める半径演算部と、
上記半径演算部により求められた最大半径が最小半径の所定倍以下のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
車両の回転角度を検出する角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求める第1のステップと、
上記第1のステップで求められた回転角度変化量と同じ角度を上記環状交差点の道路リンクで形成される環形の中心角とし、上記中心角に対する上記環形上の弧の一端を基準点とした場合に決まる上記弧の他端を現在の車両位置として求める第2のステップとを有することを特徴とする車両位置確定方法。
【請求項1】
車両の回転角度を検出する角度センサと、
上記角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求める車両角度変化量演算部と、
上記車両角度変化量演算部により求められた回転角度変化量と同じ角度を上記環状交差点の道路リンクで形成される環形の中心角とし、上記中心角に対する上記環形上の弧の一端を基準点とした場合に決まる上記弧の他端を現在の車両位置として求める車両位置演算部と、
地図データに基づいて地図を画面表示するとともに、画面表示された地図上において、上記車両位置演算部により求められた現在の車両位置に車両位置マークを表示するように制御する表示制御部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記地図データに基づいて、上記環状交差点が双方向通行路か否かを判定する双方向通行判定部と、
上記双方向通行判定部により上記環状交差点が双方向通行路でないと判定されたときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記地図データに基づいて、上記環状交差点の最大半径を求める最大半径演算部と、
上記最大半径演算部により求められた最大半径が第1のしきい値以上のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
上記地図データに基づいて、上記環状交差点の最小半径を求める最小半径演算部と、
上記最小半径演算部により求められた最小半径が第2のしきい値以下のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項5】
上記地図データに基づいて、上記環状交差点の最大半径および最小半径を求める半径演算部と、
上記半径演算部により求められた最大半径が最小半径の所定倍以下のときにのみ、上記車両角度変化量演算部および上記車両位置演算部により上記現在の車両位置を求めるように制御する制御部とを備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
車両の回転角度を検出する角度センサの出力信号に基づいて、環状交差点内を走行中の車両の回転角度変化量を求める第1のステップと、
上記第1のステップで求められた回転角度変化量と同じ角度を上記環状交差点の道路リンクで形成される環形の中心角とし、上記中心角に対する上記環形上の弧の一端を基準点とした場合に決まる上記弧の他端を現在の車両位置として求める第2のステップとを有することを特徴とする車両位置確定方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−139503(P2007−139503A)
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2005−331523(P2005−331523)
【出願日】平成17年11月16日(2005.11.16)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成17年11月16日(2005.11.16)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]