
ナビゲーション装置とそのナビゲーション方法
【課題】 従来、ナビゲーション装置では、道路の所定の区間についての渋滞情報を取得して、渋滞の度合いを提示する技術が用いられている。しかし、渋滞の度合いを事前に運転者に示すことはできても、渋滞箇所の渋滞を軽減することはできない。
本発明の目的は、渋滞の発生し易い道路の渋滞度合いを軽減しうる具体的な対策を運転者が簡便に実施することのできる技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、推奨経路に含まれるリンクから、渋滞の原因となる所定の特徴を備えるリンク列を特定し、特定したリンク列の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定し、所定の渋滞の度合いを超える場合に、リンク列の特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、を有する。
本発明の目的は、渋滞の発生し易い道路の渋滞度合いを軽減しうる具体的な対策を運転者が簡便に実施することのできる技術を提供することにある。
【解決手段】
本発明のナビゲーション装置は、推奨経路に含まれるリンクから、渋滞の原因となる所定の特徴を備えるリンク列を特定し、特定したリンク列の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定し、所定の渋滞の度合いを超える場合に、リンク列の特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、道路の所定の区間についての渋滞情報を取得して、渋滞の度合いを提示する技術が用いられている。特許文献1には、このようなナビゲーション装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−64448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、渋滞の度合いを事前に運転者に示すことはできても、渋滞箇所の渋滞を軽減することはできない。
【0005】
本発明の目的は、渋滞の発生し易い道路の渋滞度合いを軽減しうる具体的な対策を運転者が簡便に実施することのできる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係るナビゲーション装置は、車両に搭載されるナビゲーション装置であって、前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段と、前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手段と、前記道路特定手段により特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手段と、前記渋滞原因部分特定手段により特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手段と、前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、を備えることを特徴とする。
【0007】
また、本発明のナビゲーション方法は、車両に搭載されるナビゲーション装置のナビゲーション方法であって、前記ナビゲーション装置は、前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段を備え、前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手順と、前記道路特定手順において特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手順と、前記渋滞原因部分特定手順において特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手順と、前記渋滞判定手順において前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手順と、を備えることを特徴とする。
【図面の簡単な説明】
【0008】
【図1】図1は、ナビゲーション装置の概略構成図である。
【図2】図2は、リンクテーブルの構成を示す図である。
【図3】図3は、サグ部定義テーブルの構成を示す図である。
【図4】図4は、演算処理部の機能構成図である。
【図5】図5は、渋滞軽減案内処理のフロー図である。
【図6】図6は、サグ部定義テーブルの変形例を示す図である。
【図7】図7は、渋滞軽減案内処理の変形例のフロー図である。
【発明を実施するための形態】
【0009】
以下に、本発明の一実施形態を適用した車載装置であるナビゲーション装置100について、図面を参照して説明する。
【0010】
図1に、ナビゲーション装置100の構成図を示す。
【0011】
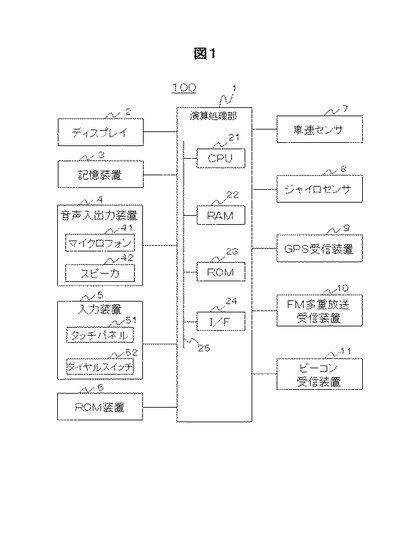
ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、を備えている。
【0012】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0013】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地(現在地)と目的地(あるいは経由地、中継地、立ち寄り地等、ユーザが向かう地点)とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0014】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0015】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0016】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0017】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200と、サグ部定義テーブル300と、が記憶されている。なお、本実施形態においては、渋滞発生の原因となる特徴的な道路形状として、サグ部定義テーブル300を設けているが、これに限られず、渋滞発生の原因となる道路形状であれば、その他の形状、例えば急カーブ等を定義することのできるテーブルを設けることとしてもよい。その例を、第一の実施形態の変形例として、後述する。
【0018】
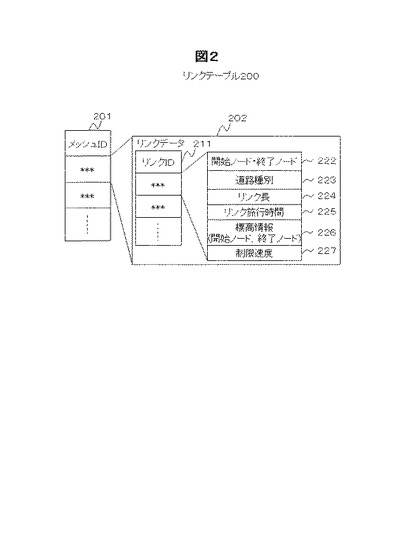
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0019】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの長さを示すリンク長224、予め記憶されたリンク旅行時間225、当該リンクの開始ノードの標高と、終了ノードの標高と、を特定する情報を含む標高情報226、リンクを含む道路の制限速度を示す制限速度227、などを含んでいる。
【0020】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0021】
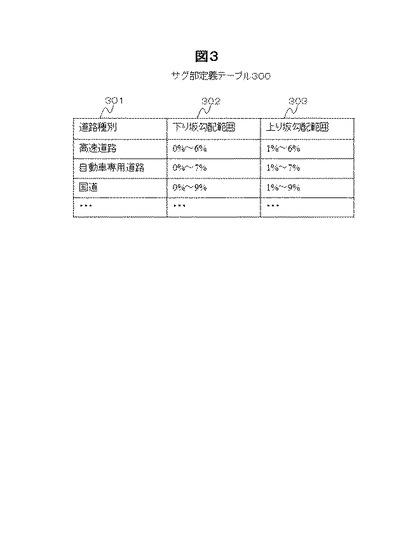
図3は、サグ部定義テーブル300の構成を示す図である。サグ部定義テーブル300は、道路の種別(「高速道路」、「国道」等)を特定する道路種別ごとに、サグ部を構成する下り坂の勾配の範囲と、当該下り坂に接続する上り坂の勾配の範囲と、を定義する情報と、を格納するテーブルである。
【0022】
例えば、サグ部定義テーブル300は、道路の種別を特定する情報である道路種別301と、下り坂の勾配の範囲を特定する下り坂勾配範囲302と、上り坂の勾配の範囲を特定する上り坂勾配範囲303と、を含んでいる。
【0023】
なお、本実施形態においては、リンクの開始ノードの標高よりも、終了ノードの標高の方が高いリンクを上り坂として、開始ノードの標高よりも、終了ノードの標高の方が低いリンクを下り坂とする。例えば、リンクの開始ノードの標高よりもリンクの終了ノードの標高の方が高いリンクの場合、リンクの開始ノードの標高と終了ノードの標高との差がリンクの距離に占める割合を上り勾配とし、当該上り勾配が所定値(例えば1%)以上である場合に、当該リンクを上り坂とする。また、リンクの開始ノードの標高よりもリンクの終了ノードの標高の方が低いリンクの場合、リンクの開始ノードの標高と終了ノードの標高との落差(正の値)がリンクの距離に占める割合を下り勾配とし、当該下り勾配が所定値(例えば1%)以上である場合に、当該リンクを下り坂とする。また、開始ノードの標高と、終了ノードの標高とが同じかまたは所定の範囲内(例えば上り勾配1%未満または下り勾配1%未満)であるリンクを平坦路とする。また、下り坂のリンクが連続する場合、または上り坂のリンクが連続する場合には、連続するリンクをまとめて、まとめたそれぞれのリンク列を一つの下り坂、あるいは一つの上り坂とする。
【0024】
本実施形態においては、下り坂と、当該下り坂に直進方向に接続する上り坂であって当該下り坂の終了ノードを開始ノードとする上り坂と、により構成されるリンク列を、サグ部と定義する。またさらに、平坦路と、当該平坦路に直進方向に接続する上り坂であって当該平坦路の終了ノードを開始ノードとする上り坂と、により構成されるリンク列についても、サグ部とみなす。
【0025】
道路種別301には、道路の種別を特定する情報、すなわち、「高速道路」、「自動車専用道路」、「国道」、「都道府県道」等の管理元の種類に応じて区分された道路の種別等が格納される。なお、道路の種別の情報は、管理元の種類に応じて区分された道路の種別であってもよいし、これに限らず、例えば、道路の法定最高速度に応じた種別であってもよい。
【0026】
下り坂勾配範囲302には、サグ部を構成する下り坂部分の下り勾配の範囲を特定する情報が格納される。なお、本実施形態においては、上記のとおり、サグ部は、下り坂(あるいは平坦路)部分と、上り坂部分とにより構成される。下り坂勾配範囲302に格納される情報は、サグ部の下り坂(あるいは平坦路)部分の下り勾配を特定する情報である。そのため、下り坂勾配の範囲は、平坦路である下り勾配0%を下限とする。
【0027】
上り坂勾配範囲303には、サグ部を構成する上り坂部分の上り勾配の範囲を特定する情報が格納される。なお、本実施形態においては、上記のとおり、サグ部は、下り坂(あるいは平坦路)部分と、上り坂部分とにより構成される。上り坂勾配範囲303に格納される情報は、サグ部の上り坂部分の上り勾配を特定する情報である。そのため、上り坂勾配の範囲は、平坦路を含まない上り勾配、例えば上り勾配1%を下限とする。
【0028】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、使用者やその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0029】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声信号として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0030】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0031】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0032】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0033】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0034】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地(自車位置)を検出するために使用されるものである。
【0035】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。
【0036】
ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。
【0037】
GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0038】
FM多重放送受信装置10は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0039】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0040】
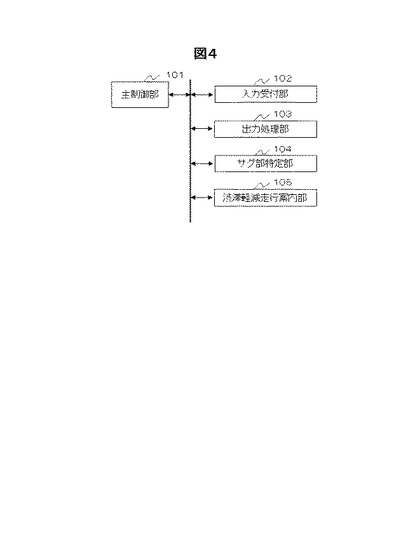
図4は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、出力処理部103と、サグ部特定部104と、渋滞軽減走行案内部105と、を有する。
【0041】
主制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング等を実施して現在地を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を記憶装置3に記憶する。さらに、各処理部からの要求に応じて、現在時刻を出力する。また、ユーザから指示された出発地(現在地)と目的地(あるいは経由地、中継地、立ち寄り地等、ユーザが向かう地点)とを結ぶ最適な経路(推奨経路)を探索し、推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0042】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力された使用者からの指示を受け付け、その要求内容に対応する処理を実行するように演算処理部1の各部を制御する。例えば、使用者が推奨経路の探索を要求したときは、目的地を設定するため、地図をディスプレイ2に表示する処理を出力処理部103に要求する。
【0043】
出力処理部103は、表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0044】
サグ部特定部104は、主制御部101により検出した現在地を示す情報と、リンクテーブル200に格納された地図データ等を用いて、目的地に到るまでの経路上または進行方向にあるサグ部を探索して特定する。具体的には、例えば、サグ部特定部104は、推奨経路を構成するそれぞれのリンクに対して、サグ部定義テーブル300に格納された定義情報に該当するか否かを判定し、該当するリンク列を特定して、当該リンク列をサグ部であると特定する。または、サグ部特定部104は、推奨経路が設定されていない場合には、車両の現在地が属する道路上の、車両の進行が予測される方向(例えば、車両の前方)の所定距離内にあるリンクに対して、サグ部を特定する。
【0045】
渋滞軽減走行案内部105は、サグ部特定部104にて直近のサグ部を特定すると、当該サグ部での渋滞を軽減するための措置を使用者に案内する。車両がACC(Auto Cruise Control)機能等の運転補助機能を備える場合には、当該機能の設定を変更して、渋滞を軽減させるのに効果があると想定される走行を案内する。例えば、ACCの設定における車間距離を長く設定したり、車速の設定を制限速度以下の周囲の車両の平均速度に設定したり、あるいは加減速を緩やかに設定する、等である。なお、図示しないが、案内する内容は、道路状況に応じて必要な措置が予め対応付けられて記憶装置3に格納されている。
【0046】
上記した演算処理部1の各機能部、すなわち主制御部101、入力受付部102、出力処理部103、サグ部特定部104、渋滞軽減走行案内部105は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM21には、各機能部の処理を実現するためのプログラムが記憶されている。
【0047】
なお、上記した各構成要素は、ナビゲーション装置100の構成を理解容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0048】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0049】
[動作の説明]
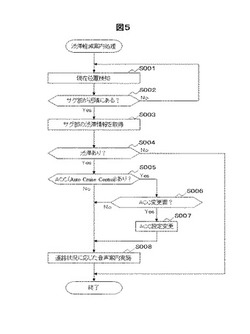
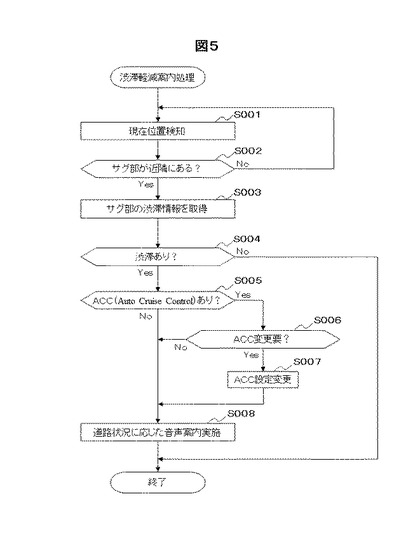
次に、ナビゲーション装置100の動作について説明する。図5は、経路誘導時において、渋滞を軽減させる案内を使用者に対して実施する渋滞軽減案内処理のフロー図である。このフローは、ナビゲーション装置100が探索した経路を走行している間に、所定の間隔(例えば1分間隔)で開始される。
【0050】
まず、サグ部特定部104は、現在地を検知する(ステップS001)。具体的には、サグ部特定部104は、主制御部101に現在地を問い合わせ、主制御部101は、現在地を特定して経路探索部104に受け渡す。
【0051】
次に、サグ部特定部104は、現在地の近隣にサグ部があるか否かを判定する(ステップS002)。具体的には、サグ部特定部104は、まず、設定されている誘導経路に含まれるリンクのうち現在地から所定の距離(例えば、1km)内にあるリンクを、現在地から近い順に対象リンクとして読み出し、あわせて、読み出した対象リンクに続くリンクを後続リンクとして読み出す。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部定義テーブル300に定義されたサグ部としての定義に沿うか否かを判定する。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿う場合には、近隣にサグ部があると判定する。サグ部特定部104は、サグ部としての定義に沿う対象リンクと後続リンクとが存在しない場合には、近隣にサグ部は存在しないと判定する。
【0052】
ここで、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿うか否かを判定する処理を以下に説明する。まず、サグ部特定部104は、対象リンクの道路種別と、開始ノードの標高と、終了ノードの標高と、リンク長とを、リンクテーブル200の道路種別223、標高情報226、リンク長224、を読み出してそれぞれ特定する。次に、サグ部特定部104は、開始ノードの標高から終了ノードの標高を差し引いた値(すなわち、開始ノードよりも終了ノードの方が標高が高い場合には、マイナスの値となる)がリンク長に占める割合を算出して、勾配の度合いを求める。求めた勾配の度合いが−1%以下であれば、サグ部特定部104は、当該対象リンクは上り坂に該当すると判定して、対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。そして、サグ部特定部104は、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとしてサグ部としての定義に沿うか否かを判定する。
【0053】
求めた勾配の度合いが−1%を超える値であれば、サグ部特定部104は、当該対象リンクは平坦路または下り坂であるため、サグ部の定義に沿う可能性があるとみなして、サグ部の定義に沿うか否かをさらに精査する。
【0054】
サグ部の定義に沿うか否かを精査する処理においては、サグ部特定部104が、サグ部定義テーブル300に格納されたサグ部の定義に沿うか否かを判定することにより行う。サグ部特定部104は、サグ部定義テーブル300の道路種別301に格納されたレコードのうち、対象リンクの道路種別に対応するレコードを特定し、下り坂勾配範囲302と上り坂勾配範囲303とに格納された情報を読み出す。
【0055】
サグ部特定部104は、対象リンクの勾配の度合いが下り坂勾配範囲302に格納された値の範囲に含まれるか否かを判定し、範囲に含まれない場合には、対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。その場合、上述したように、サグ部特定部104は、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かの判定をする処理に制御を戻す。
【0056】
対象リンクの勾配の度合いが下り坂勾配範囲302に格納された値の範囲に含まれる場合には、サグ部特定部104は、さらに、後続リンクについての勾配を上述と同様に算出し、後続リンクについての勾配が上り坂勾配範囲303に格納された値の範囲に含まれるか否かを判定する。後続リンクについての勾配の度合いが上り坂勾配範囲303に格納された値の範囲に含まれない場合には、サグ部特定部104は、当該対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定して、上述のように、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かの判定をする処理に制御を戻す。後続リンクについての勾配の度合いが上り坂勾配範囲303に格納された値の範囲に含まれる場合には、サグ部特定部104は、当該対象リンクと後続リンクにより構成されるリンク列がサグ部の定義に沿う、すなわちサグ部であると判定する。以上が、対象リンクと後続リンクとが、サグ部としての定義に沿うか否かを判定する処理の詳細である。
【0057】
サグ部が現在地の近隣にない場合(ステップS002にて「No」)、主制御部101は、処理をステップS001に戻す。
【0058】
サグ部が現在地の近隣にある場合(ステップS002にて「Yes」)、主制御部101は、サグ部の渋滞情報を取得する(ステップS003)。具体的には、主制御部101は、ビーコン受信装置11やFM多重放送受信装置10を介して外部から取得した渋滞情報を読み出し、当該サグ部を構成するリンク列のうち、対象リンク(または後続リンク、あるいは対象リンクと後続リンクの両方)についての渋滞の度合いを取得する。
【0059】
そして、渋滞軽減走行案内部105は、当該サグ部に渋滞が発生しているか否かを判定する(ステップS004)。具体的には、渋滞軽減走行案内部105は、ステップS003にて取得した渋滞の度合いを示す情報が、所定の閾値(例えば「渋滞なし」「混雑」「渋滞」等の段階がある場合に「混雑」等)を超えているか否かを判定して、超えている場合には、渋滞があると判定する。なお、対象リンクと後続リンクの両方の渋滞の度合いを用いて、例えば平均して、所定の閾値を超えているか否かを判定することで渋滞の存在を判定するようにしてもよい。
【0060】
サグ部に渋滞がない場合(ステップS004にて「No」)、渋滞軽減走行案内部105は、渋滞軽減案内処理を終了させる。
【0061】
サグ部に渋滞がある場合(ステップS004にて「Yes」)、渋滞軽減走行案内部105は、ナビゲーション装置100が搭載された車両にACC(Auto Cruise Control)機能が備わっているか否かを判定する(ステップS005)。
【0062】
車両にACC機能が備わっている場合(ステップS005にて「Yes」)、渋滞軽減走行案内部105は、ACCの設定の変更が必要か否かを判定する(ステップS006)。具体的には、渋滞軽減走行案内部105は、ACCの設定内容を取得して、ACCの設定内容がサグ部での渋滞軽減のための設定と相違するか否かを判定し、相違する場合には設定が必要であると判定する。例えば、車間距離のACC設定値に「短い(40m)」、「標準(100m)」、「長い(200m)」の複数の段階があり、車速のACC設定値に「制限速度」、「推奨速度(外部の交通情報センター等から取得する周囲の車両の平均走行速度)」の複数の段階があり、加減速のACC設定値に「緩やかに」、「通常」等の複数の段階がある場合を例に挙げて説明する。この場合、車間距離のACC設定値に「長い」という規定値が設定され、車速のACC設定値に「推奨速度」という規定値が設定され、加減速のACC設定値に「緩やかに」という規定値が設定されている状態であれば、渋滞軽減走行案内部105は、サグ部での渋滞軽減のための設定と相違しないと判定する。そうでない場合、渋滞軽減走行案内部105は、サグ部での渋滞軽減のための設定と相違すると判定する。
【0063】
ACCの設定変更が必要である場合(ステップS006にて「Yes」)、渋滞軽減走行案内部105は、ACCの設定を変更する(ステップS007)。渋滞軽減走行案内部105は、設定するACCの設定値を、予め定められた場合分けに基づいて道路の状況に応じて変更する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、車間距離を「長い」に設定する等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が設定変更の対象となるACC設定項目と設定値とを特定して変更する。なお、これに限らず、渋滞軽減走行案内部105は、一律にACCの設定値を予め定められた値に設定するようにしてもよい。
【0064】
ACCの設定変更が不要である場合(ステップS006にて「No」)、または車両にACC機能が備わっていない場合(ステップS005にて「No」)、およびACC設定を変更した後(ステップS007実施後)、渋滞軽減走行案内部105は、道路状況に応じて音声案内を実施する(ステップS008)。
【0065】
具体的には、渋滞軽減走行案内部105は、予め定められた場合分けに基づいて道路の状況に応じて運転者に注意を喚起するよう音声にて案内する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、「車間距離を長く確保する」よう音声案内を行う等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が音声案内の対象となる項目と案内する内容とを特定して音声案内を行う。なお、これに限らず、渋滞軽減走行案内部105は、一律に予め定められた音声案内すべき項目と内容とに従って音声案内を行うようにしてもよい。
【0066】
以上が、渋滞軽減案内処理の処理内容である。上記の渋滞軽減案内処理を行う事によって、ナビゲーション装置100は、経路誘導時に、進行方向の道路が渋滞発生原因となるサグ部等の形状を有する場合に、渋滞が軽減されるように事前に運転者に意識づけることができる。また、渋滞が軽減されるように車両の走行制御を行うことができる。
【0067】
以上、本発明の一実施形態について説明した。
【0068】
本発明の一実施形態によると、ナビゲーション装置100は、道路の形状に応じて、渋滞を軽減するための走行を運転者に伝えることができる。
【0069】
また、車両にACCの機能が搭載されている場合には、ナビゲーション装置100は、渋滞の度合いの緩和に寄与することができる。
【0070】
本発明は、上記実施形態に制限されない。上記実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記実施形態における渋滞軽減走行案内処理について、図7に示す処理内容とすることが可能である。
【0071】
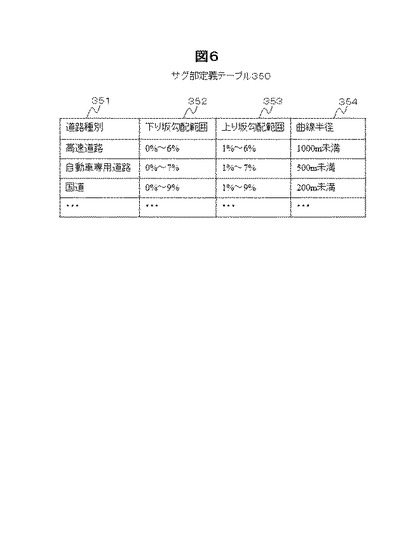
図7の渋滞軽減走行案内処理の処理内容を説明する前に、当該渋滞軽減走行案内処理において用いるサグ部定義テーブル350を、図6を用いて説明する。
【0072】
図6は、第一の実施形態における300について、本実施形態において変形させた例であるサグ部定義テーブル350の構成例を示す図である。本実施形態におけるサグ部定義テーブル350は、道路種別351と、下り坂勾配範囲352と、上り坂勾配範囲353と、曲線半径354と、を含んでいる。なお、サグ部定義テーブル350は、ナビゲーション装置100の記憶装置3に格納される。また、リンクテーブル200に格納されたリンクごとに、当該リンクの形状、とくに水平方向の角度差を特定するための曲線半径に関する情報が格納されているものとする。
【0073】
道路種別351は、第一の実施形態におけるサグ部定義テーブル300の道路種別301と同様であり、下り坂勾配範囲352と上り坂勾配範囲353についても、それぞれサグ部定義テーブル300の下り坂勾配範囲352と上り坂勾配範囲353と同様である。
【0074】
曲線半径354は、垂直方向の高低差によって誘発される制動により生ずる渋滞以外に、水平方向の角度差によって誘発される制動により生ずる渋滞箇所を特定する情報である。すなわち、曲線半径354は、曲がり具合の大きい(つまり水平方向の角度差である曲線半径が所定値以下となる)道路を特定するために用いる曲がりの度合いの所定値を特定する情報である。
【0075】
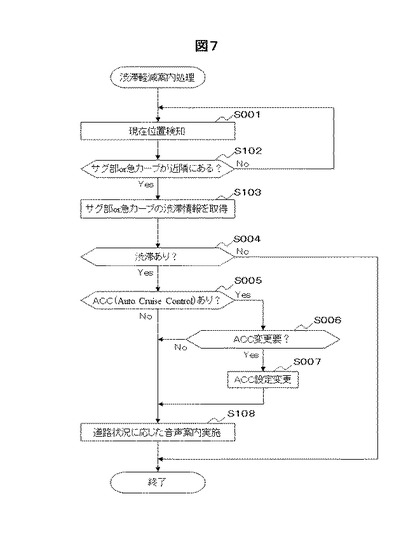
図7は、経路誘導時において、渋滞を軽減させる案内を使用者に対して実施する渋滞軽減案内処理のフロー図である。このフローは、ナビゲーション装置100が探索した経路を走行している間に、所定の間隔(例えば1分間隔)で開始される。なお、図7に示す渋滞軽減案内処理のフローは、基本的には図5に示した渋滞軽減案内処理と同様であるため、相違する部分の処理について以下に説明する。
【0076】
ステップS001にて現在地を検知した後、サグ部特定部104は、サグ部または急カーブが現在地の近隣にあるか否かを判定する(ステップS102)。具体的には、サグ部特定部104は、まず、設定されている誘導経路に含まれるリンクのうち現在地から所定の距離(例えば、1km)内にあるリンクを、現在地から近い順に対象リンクとして読み出し、あわせて、読み出した対象リンクに続くリンクを後続リンクとして読み出す。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部定義テーブル300に定義されたサグ部としての定義に沿うか否か、および曲線半径の範囲に含まれるか否か、を判定する。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿う場合、または曲線半径の範囲に含まれる場合には、近隣にサグ部があると判定する。サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿わず、かつ、曲線半径の範囲に含まれない場合には、近隣にサグ部は存在しないと判定する。
【0077】
ここで、サグ部特定部104は、対象リンクと後続リンクとが、サグ部にあたるか否か、および曲線半径の範囲に含まれるか否か(急カーブであるか否か)、を判定する処理を以下に説明する。まず、サグ部特定部104は、対象リンクの道路種別と、開始ノードの標高と、終了ノードの標高と、リンク長と、曲線半径とを、リンクテーブル200の道路種別223、標高情報226、リンク長224、曲線半径を読み出してそれぞれ特定する。次に、サグ部特定部104は、開始ノードの標高から終了ノードの標高を差し引いた値がリンク長に占める割合を算出して、勾配の度合いを求める。求めた勾配の度合いが−1%以下であれば、当該対象リンクは上り坂であるため、サグ部特定部104は対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。サグ部の定義に沿わない場合、サグ部特定部104は、対象リンクの曲線半径が曲線半径354の値により特定される範囲に含まれるか否かを判定し、曲線半径が当該範囲に含まれる場合には、急カーブであるとして、ステップS102の処理を「Yes」で抜ける。曲線半径354の値により特定される範囲にも含まれない場合には、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かを判定する。
【0078】
求めた勾配の度合いが−1%を超える場合は、サグ部特定部104は、当該対象リンクが下り坂または平坦路であるため、サグ部の定義に沿う可能性があるとみなして、サグ部の定義に沿うか否かを精査する。当該精査の処理は、上述の第一実施形態と同様のため、説明を省略する。
【0079】
サグ部または急カーブが現在地の近隣にない場合(ステップS102にて「No」)、主制御部101は、処理をステップS001に戻す。
【0080】
サグ部または急カーブが現在地の近隣にある場合(ステップS102にて「Yes」)、主制御部101は、サグ部または急カーブの渋滞情報を取得する(ステップS103)。具体的には、主制御部101は、ビーコン受信装置11やFM多重放送受信装置10を介して外部から取得した渋滞情報を読み出し、当該サグ部または急カーブを構成するリンクのうち対象リンクの渋滞の度合いを取得する。
【0081】
ACCの設定変更が不要である場合(ステップS006にて「No」)、または車両にACC機能が備わっていない場合(ステップS005にて「No」)、およびACC設定を変更した後(ステップS007実施後)、渋滞軽減走行案内部105は、道路状況、すなわち道路がサグ部であるか、急カーブであるか、等に応じて音声案内を実施する(ステップS108)。
【0082】
具体的には、渋滞軽減走行案内部105は、予め定められた場合分けに基づいて道路の状況に応じて運転者に注意を喚起するよう音声にて案内する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、「車間距離を長く確保する」よう音声案内を行う等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が音声案内の対象となる項目と案内する内容とを特定して音声案内を行う。また、急カーブの場合、「車速を制限速度以下とする」よう音声案内を行う。なお、これに限らず、渋滞軽減走行案内部105は、一律に予め定められた音声案内すべき項目と内容とに従って音声案内を行うようにしてもよい。
【0083】
以上が、渋滞軽減案内処理の変形例である。上記の渋滞軽減案内処理を行う事によって、ナビゲーション装置100は、経路誘導時に、進行方向の道路が渋滞発生原因となるサグ部や急カーブ等の形状を有する場合に、渋滞が軽減されるように事前に運転者に意識づけることができる。また、渋滞が軽減されるように車両の走行制御を行うことができる。
【0084】
また例えば、上記第一の実施形態およびその変形例では、サグ部または急カーブを構成するリンクを特定するために、勾配や曲線半径を用いて定義に沿うか否かを判定して特定するが、これに限られない。
【0085】
例えば、記憶装置3に予めサグ部および急カーブを構成するリンクを特定する情報を記憶しておき、推奨経路を構成するリンク列に当該リンクが含まれるか否かを判定することでサグ部および急カーブを特定するようにしてもよい。
【0086】
このようにすることで、ナビゲーション装置の計算量を減らすことができ、演算処理能力がそれほど高くない演算処理部1を備える軽量・小型のナビゲーション装置等においても応答速度を高くすることが可能となる。
【0087】
また、上記実施形態においては、サグ部を二つのリンクから構成されるリンク列としていたが、これに限らず、二以上のリンクを含んで構成される部分をサグ部としてもよい。具体的には、上記実施形態において特定したサグ部を構成するリンク列と接続されるリンクを、当該リンク列の前後に付加し、サグ部として特定するようにしてもよい。例えば、サグ部として特定されたリンク列を構成するリンクのうち、いずれかのリンク(例えば下り坂のリンク)の勾配と類似する(勾配の差が所定の範囲内である)勾配を有するリンクであって、当該リンク列を構成するリンクの前後の所定距離内に位置するリンクを含めて、サグ部として特定するようにしてもよい。
【0088】
このようにすることで、アップダウンの激しい道路等では、複数のサグ部を至近距離で検出してしまい、渋滞を軽減する走行の案内を短時間のうちに頻繁に行ってしまうことを避けることが可能となる。
【0089】
また、上記実施形態における渋滞軽減案内処理のステップS002において、サグ部を探索する処理において、リンクごとにサグ部であるか否かを判定しているが、これに限られない。すなわち、サグ部特定部104は、所定の区間内の勾配がサグ部定義テーブル300に定められた所定の勾配条件に含まれるか否かによって、サグ部となる区間を特定するようにしてもよい。
【0090】
例えば、サグ部特定部104は、現在地が属する道路に所定の距離(例えば、2km)を有する複数の区間を設定し、当該区間ごとに、最も標高が低い地点を特定して基準点とする。そして、サグ部特定部104は、当該区間の始点(自車から近い方の端)側の所定の地点(例えば、当該道路を構成するリンクのノード)の標高の平均との差である第一の高低差と、当該区間の終点(自車から遠い方の端)側の所定の地点の標高の平均との差である第二の高低差と、をそれぞれ求める。そして、サグ部特定部104は、当該区間の始点から基準点までの距離に対する第一の高低差の割合を算出して第一の勾配とし、基準点から当該区間の終点までの距離に対する第二の高低差の割合を算出して第二の勾配として特定する。そして、サグ部特定部104は、当該道路の道路種別に応じて、第一の勾配がサグ部定義テーブル300に規定する下り坂勾配範囲302に含まれ、かつ、第二の勾配が上り坂勾配範囲303に含まれる場合に、当該区間をサグ部であると特定する。
【0091】
このようにすることで、一つのリンクが細かく(例えばリンクの距離が50mとして)設定されているような複雑な場所においては、所定距離に含まれる膨大な数のリンクに対してサグ部であるか否かを判定する処理の演算量を減らすことが可能となる。
【0092】
また、上記実施形態においては、推奨経路上の所定の区間を対象としてサグ部を探索するが、これに限られない。すなわち、推奨経路が設定されていない状態であっても、サグ部を特定して渋滞軽減案内を行うようにしてもよい。例えば、サグ部特定部104は、ステップS002において、推奨経路が設定されていないことを検知すると、現在地が属する道路上の進行方向の所定距離内(例えば10km内)に含まれる所定の区間を対象としてサグ部を特定するようにしてもよい。もちろん、その他にも、サグ部特定部104は、進行方向を含む所定の方向(進行方向を基準の方向として、左側と右側それぞれ60度までの方向)に含まれる所定距離内の道路を対象としてサグ部を特定するようにしてもよい。
【0093】
このようにすることで、使用者は、特に目的地を決めずにドライブしている場合等においても、渋滞を軽減するための走行の案内を受けることが可能となる。
【0094】
以上、本発明の実施形態の変形例について説明した。
【0095】
本発明の変形例を適用することによって、使用者は、渋滞が発生している箇所に向かって走行する場合に、少しでも渋滞が軽減されるように走行することができる。
【0096】
なお、上記の実施形態では、本発明を車載ナビゲーション装置に適用した例について説明したが、本発明は車載ナビゲーション装置に限らず、ナビゲーション装置全般に適用することができる。
【符号の説明】
【0097】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・出力処理部、104・・・サグ部特定部、105・・・渋滞軽減走行案内部、200・・・リンクテーブル、300、350・・・サグ部定義テーブル
【技術分野】
【0001】
本発明は、ナビゲーション技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、道路の所定の区間についての渋滞情報を取得して、渋滞の度合いを提示する技術が用いられている。特許文献1には、このようなナビゲーション装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−64448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、渋滞の度合いを事前に運転者に示すことはできても、渋滞箇所の渋滞を軽減することはできない。
【0005】
本発明の目的は、渋滞の発生し易い道路の渋滞度合いを軽減しうる具体的な対策を運転者が簡便に実施することのできる技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係るナビゲーション装置は、車両に搭載されるナビゲーション装置であって、前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段と、前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手段と、前記道路特定手段により特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手段と、前記渋滞原因部分特定手段により特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手段と、前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、を備えることを特徴とする。
【0007】
また、本発明のナビゲーション方法は、車両に搭載されるナビゲーション装置のナビゲーション方法であって、前記ナビゲーション装置は、前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段を備え、前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手順と、前記道路特定手順において特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手順と、前記渋滞原因部分特定手順において特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手順と、前記渋滞判定手順において前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手順と、を備えることを特徴とする。
【図面の簡単な説明】
【0008】
【図1】図1は、ナビゲーション装置の概略構成図である。
【図2】図2は、リンクテーブルの構成を示す図である。
【図3】図3は、サグ部定義テーブルの構成を示す図である。
【図4】図4は、演算処理部の機能構成図である。
【図5】図5は、渋滞軽減案内処理のフロー図である。
【図6】図6は、サグ部定義テーブルの変形例を示す図である。
【図7】図7は、渋滞軽減案内処理の変形例のフロー図である。
【発明を実施するための形態】
【0009】
以下に、本発明の一実施形態を適用した車載装置であるナビゲーション装置100について、図面を参照して説明する。
【0010】
図1に、ナビゲーション装置100の構成図を示す。
【0011】
ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、を備えている。
【0012】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0013】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、ユーザから指示された出発地(現在地)と目的地(あるいは経由地、中継地、立ち寄り地等、ユーザが向かう地点)とを結ぶ最適な経路(推奨経路)を探索する。また、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0014】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0015】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0016】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0017】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200と、サグ部定義テーブル300と、が記憶されている。なお、本実施形態においては、渋滞発生の原因となる特徴的な道路形状として、サグ部定義テーブル300を設けているが、これに限られず、渋滞発生の原因となる道路形状であれば、その他の形状、例えば急カーブ等を定義することのできるテーブルを設けることとしてもよい。その例を、第一の実施形態の変形例として、後述する。
【0018】
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0019】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222、リンクを含む道路の種別を示す道路種別223、リンクの長さを示すリンク長224、予め記憶されたリンク旅行時間225、当該リンクの開始ノードの標高と、終了ノードの標高と、を特定する情報を含む標高情報226、リンクを含む道路の制限速度を示す制限速度227、などを含んでいる。
【0020】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0021】
図3は、サグ部定義テーブル300の構成を示す図である。サグ部定義テーブル300は、道路の種別(「高速道路」、「国道」等)を特定する道路種別ごとに、サグ部を構成する下り坂の勾配の範囲と、当該下り坂に接続する上り坂の勾配の範囲と、を定義する情報と、を格納するテーブルである。
【0022】
例えば、サグ部定義テーブル300は、道路の種別を特定する情報である道路種別301と、下り坂の勾配の範囲を特定する下り坂勾配範囲302と、上り坂の勾配の範囲を特定する上り坂勾配範囲303と、を含んでいる。
【0023】
なお、本実施形態においては、リンクの開始ノードの標高よりも、終了ノードの標高の方が高いリンクを上り坂として、開始ノードの標高よりも、終了ノードの標高の方が低いリンクを下り坂とする。例えば、リンクの開始ノードの標高よりもリンクの終了ノードの標高の方が高いリンクの場合、リンクの開始ノードの標高と終了ノードの標高との差がリンクの距離に占める割合を上り勾配とし、当該上り勾配が所定値(例えば1%)以上である場合に、当該リンクを上り坂とする。また、リンクの開始ノードの標高よりもリンクの終了ノードの標高の方が低いリンクの場合、リンクの開始ノードの標高と終了ノードの標高との落差(正の値)がリンクの距離に占める割合を下り勾配とし、当該下り勾配が所定値(例えば1%)以上である場合に、当該リンクを下り坂とする。また、開始ノードの標高と、終了ノードの標高とが同じかまたは所定の範囲内(例えば上り勾配1%未満または下り勾配1%未満)であるリンクを平坦路とする。また、下り坂のリンクが連続する場合、または上り坂のリンクが連続する場合には、連続するリンクをまとめて、まとめたそれぞれのリンク列を一つの下り坂、あるいは一つの上り坂とする。
【0024】
本実施形態においては、下り坂と、当該下り坂に直進方向に接続する上り坂であって当該下り坂の終了ノードを開始ノードとする上り坂と、により構成されるリンク列を、サグ部と定義する。またさらに、平坦路と、当該平坦路に直進方向に接続する上り坂であって当該平坦路の終了ノードを開始ノードとする上り坂と、により構成されるリンク列についても、サグ部とみなす。
【0025】
道路種別301には、道路の種別を特定する情報、すなわち、「高速道路」、「自動車専用道路」、「国道」、「都道府県道」等の管理元の種類に応じて区分された道路の種別等が格納される。なお、道路の種別の情報は、管理元の種類に応じて区分された道路の種別であってもよいし、これに限らず、例えば、道路の法定最高速度に応じた種別であってもよい。
【0026】
下り坂勾配範囲302には、サグ部を構成する下り坂部分の下り勾配の範囲を特定する情報が格納される。なお、本実施形態においては、上記のとおり、サグ部は、下り坂(あるいは平坦路)部分と、上り坂部分とにより構成される。下り坂勾配範囲302に格納される情報は、サグ部の下り坂(あるいは平坦路)部分の下り勾配を特定する情報である。そのため、下り坂勾配の範囲は、平坦路である下り勾配0%を下限とする。
【0027】
上り坂勾配範囲303には、サグ部を構成する上り坂部分の上り勾配の範囲を特定する情報が格納される。なお、本実施形態においては、上記のとおり、サグ部は、下り坂(あるいは平坦路)部分と、上り坂部分とにより構成される。上り坂勾配範囲303に格納される情報は、サグ部の上り坂部分の上り勾配を特定する情報である。そのため、上り坂勾配の範囲は、平坦路を含まない上り勾配、例えば上り勾配1%を下限とする。
【0028】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、使用者やその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0029】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声信号として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0030】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0031】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0032】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0033】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0034】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地(自車位置)を検出するために使用されるものである。
【0035】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。
【0036】
ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。
【0037】
GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0038】
FM多重放送受信装置10は、FM多重放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0039】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0040】
図4は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、主制御部101と、入力受付部102と、出力処理部103と、サグ部特定部104と、渋滞軽減走行案内部105と、を有する。
【0041】
主制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング等を実施して現在地を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を記憶装置3に記憶する。さらに、各処理部からの要求に応じて、現在時刻を出力する。また、ユーザから指示された出発地(現在地)と目的地(あるいは経由地、中継地、立ち寄り地等、ユーザが向かう地点)とを結ぶ最適な経路(推奨経路)を探索し、推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0042】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力された使用者からの指示を受け付け、その要求内容に対応する処理を実行するように演算処理部1の各部を制御する。例えば、使用者が推奨経路の探索を要求したときは、目的地を設定するため、地図をディスプレイ2に表示する処理を出力処理部103に要求する。
【0043】
出力処理部103は、表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0044】
サグ部特定部104は、主制御部101により検出した現在地を示す情報と、リンクテーブル200に格納された地図データ等を用いて、目的地に到るまでの経路上または進行方向にあるサグ部を探索して特定する。具体的には、例えば、サグ部特定部104は、推奨経路を構成するそれぞれのリンクに対して、サグ部定義テーブル300に格納された定義情報に該当するか否かを判定し、該当するリンク列を特定して、当該リンク列をサグ部であると特定する。または、サグ部特定部104は、推奨経路が設定されていない場合には、車両の現在地が属する道路上の、車両の進行が予測される方向(例えば、車両の前方)の所定距離内にあるリンクに対して、サグ部を特定する。
【0045】
渋滞軽減走行案内部105は、サグ部特定部104にて直近のサグ部を特定すると、当該サグ部での渋滞を軽減するための措置を使用者に案内する。車両がACC(Auto Cruise Control)機能等の運転補助機能を備える場合には、当該機能の設定を変更して、渋滞を軽減させるのに効果があると想定される走行を案内する。例えば、ACCの設定における車間距離を長く設定したり、車速の設定を制限速度以下の周囲の車両の平均速度に設定したり、あるいは加減速を緩やかに設定する、等である。なお、図示しないが、案内する内容は、道路状況に応じて必要な措置が予め対応付けられて記憶装置3に格納されている。
【0046】
上記した演算処理部1の各機能部、すなわち主制御部101、入力受付部102、出力処理部103、サグ部特定部104、渋滞軽減走行案内部105は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM21には、各機能部の処理を実現するためのプログラムが記憶されている。
【0047】
なお、上記した各構成要素は、ナビゲーション装置100の構成を理解容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0048】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0049】
[動作の説明]
次に、ナビゲーション装置100の動作について説明する。図5は、経路誘導時において、渋滞を軽減させる案内を使用者に対して実施する渋滞軽減案内処理のフロー図である。このフローは、ナビゲーション装置100が探索した経路を走行している間に、所定の間隔(例えば1分間隔)で開始される。
【0050】
まず、サグ部特定部104は、現在地を検知する(ステップS001)。具体的には、サグ部特定部104は、主制御部101に現在地を問い合わせ、主制御部101は、現在地を特定して経路探索部104に受け渡す。
【0051】
次に、サグ部特定部104は、現在地の近隣にサグ部があるか否かを判定する(ステップS002)。具体的には、サグ部特定部104は、まず、設定されている誘導経路に含まれるリンクのうち現在地から所定の距離(例えば、1km)内にあるリンクを、現在地から近い順に対象リンクとして読み出し、あわせて、読み出した対象リンクに続くリンクを後続リンクとして読み出す。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部定義テーブル300に定義されたサグ部としての定義に沿うか否かを判定する。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿う場合には、近隣にサグ部があると判定する。サグ部特定部104は、サグ部としての定義に沿う対象リンクと後続リンクとが存在しない場合には、近隣にサグ部は存在しないと判定する。
【0052】
ここで、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿うか否かを判定する処理を以下に説明する。まず、サグ部特定部104は、対象リンクの道路種別と、開始ノードの標高と、終了ノードの標高と、リンク長とを、リンクテーブル200の道路種別223、標高情報226、リンク長224、を読み出してそれぞれ特定する。次に、サグ部特定部104は、開始ノードの標高から終了ノードの標高を差し引いた値(すなわち、開始ノードよりも終了ノードの方が標高が高い場合には、マイナスの値となる)がリンク長に占める割合を算出して、勾配の度合いを求める。求めた勾配の度合いが−1%以下であれば、サグ部特定部104は、当該対象リンクは上り坂に該当すると判定して、対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。そして、サグ部特定部104は、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとしてサグ部としての定義に沿うか否かを判定する。
【0053】
求めた勾配の度合いが−1%を超える値であれば、サグ部特定部104は、当該対象リンクは平坦路または下り坂であるため、サグ部の定義に沿う可能性があるとみなして、サグ部の定義に沿うか否かをさらに精査する。
【0054】
サグ部の定義に沿うか否かを精査する処理においては、サグ部特定部104が、サグ部定義テーブル300に格納されたサグ部の定義に沿うか否かを判定することにより行う。サグ部特定部104は、サグ部定義テーブル300の道路種別301に格納されたレコードのうち、対象リンクの道路種別に対応するレコードを特定し、下り坂勾配範囲302と上り坂勾配範囲303とに格納された情報を読み出す。
【0055】
サグ部特定部104は、対象リンクの勾配の度合いが下り坂勾配範囲302に格納された値の範囲に含まれるか否かを判定し、範囲に含まれない場合には、対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。その場合、上述したように、サグ部特定部104は、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かの判定をする処理に制御を戻す。
【0056】
対象リンクの勾配の度合いが下り坂勾配範囲302に格納された値の範囲に含まれる場合には、サグ部特定部104は、さらに、後続リンクについての勾配を上述と同様に算出し、後続リンクについての勾配が上り坂勾配範囲303に格納された値の範囲に含まれるか否かを判定する。後続リンクについての勾配の度合いが上り坂勾配範囲303に格納された値の範囲に含まれない場合には、サグ部特定部104は、当該対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定して、上述のように、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かの判定をする処理に制御を戻す。後続リンクについての勾配の度合いが上り坂勾配範囲303に格納された値の範囲に含まれる場合には、サグ部特定部104は、当該対象リンクと後続リンクにより構成されるリンク列がサグ部の定義に沿う、すなわちサグ部であると判定する。以上が、対象リンクと後続リンクとが、サグ部としての定義に沿うか否かを判定する処理の詳細である。
【0057】
サグ部が現在地の近隣にない場合(ステップS002にて「No」)、主制御部101は、処理をステップS001に戻す。
【0058】
サグ部が現在地の近隣にある場合(ステップS002にて「Yes」)、主制御部101は、サグ部の渋滞情報を取得する(ステップS003)。具体的には、主制御部101は、ビーコン受信装置11やFM多重放送受信装置10を介して外部から取得した渋滞情報を読み出し、当該サグ部を構成するリンク列のうち、対象リンク(または後続リンク、あるいは対象リンクと後続リンクの両方)についての渋滞の度合いを取得する。
【0059】
そして、渋滞軽減走行案内部105は、当該サグ部に渋滞が発生しているか否かを判定する(ステップS004)。具体的には、渋滞軽減走行案内部105は、ステップS003にて取得した渋滞の度合いを示す情報が、所定の閾値(例えば「渋滞なし」「混雑」「渋滞」等の段階がある場合に「混雑」等)を超えているか否かを判定して、超えている場合には、渋滞があると判定する。なお、対象リンクと後続リンクの両方の渋滞の度合いを用いて、例えば平均して、所定の閾値を超えているか否かを判定することで渋滞の存在を判定するようにしてもよい。
【0060】
サグ部に渋滞がない場合(ステップS004にて「No」)、渋滞軽減走行案内部105は、渋滞軽減案内処理を終了させる。
【0061】
サグ部に渋滞がある場合(ステップS004にて「Yes」)、渋滞軽減走行案内部105は、ナビゲーション装置100が搭載された車両にACC(Auto Cruise Control)機能が備わっているか否かを判定する(ステップS005)。
【0062】
車両にACC機能が備わっている場合(ステップS005にて「Yes」)、渋滞軽減走行案内部105は、ACCの設定の変更が必要か否かを判定する(ステップS006)。具体的には、渋滞軽減走行案内部105は、ACCの設定内容を取得して、ACCの設定内容がサグ部での渋滞軽減のための設定と相違するか否かを判定し、相違する場合には設定が必要であると判定する。例えば、車間距離のACC設定値に「短い(40m)」、「標準(100m)」、「長い(200m)」の複数の段階があり、車速のACC設定値に「制限速度」、「推奨速度(外部の交通情報センター等から取得する周囲の車両の平均走行速度)」の複数の段階があり、加減速のACC設定値に「緩やかに」、「通常」等の複数の段階がある場合を例に挙げて説明する。この場合、車間距離のACC設定値に「長い」という規定値が設定され、車速のACC設定値に「推奨速度」という規定値が設定され、加減速のACC設定値に「緩やかに」という規定値が設定されている状態であれば、渋滞軽減走行案内部105は、サグ部での渋滞軽減のための設定と相違しないと判定する。そうでない場合、渋滞軽減走行案内部105は、サグ部での渋滞軽減のための設定と相違すると判定する。
【0063】
ACCの設定変更が必要である場合(ステップS006にて「Yes」)、渋滞軽減走行案内部105は、ACCの設定を変更する(ステップS007)。渋滞軽減走行案内部105は、設定するACCの設定値を、予め定められた場合分けに基づいて道路の状況に応じて変更する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、車間距離を「長い」に設定する等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が設定変更の対象となるACC設定項目と設定値とを特定して変更する。なお、これに限らず、渋滞軽減走行案内部105は、一律にACCの設定値を予め定められた値に設定するようにしてもよい。
【0064】
ACCの設定変更が不要である場合(ステップS006にて「No」)、または車両にACC機能が備わっていない場合(ステップS005にて「No」)、およびACC設定を変更した後(ステップS007実施後)、渋滞軽減走行案内部105は、道路状況に応じて音声案内を実施する(ステップS008)。
【0065】
具体的には、渋滞軽減走行案内部105は、予め定められた場合分けに基づいて道路の状況に応じて運転者に注意を喚起するよう音声にて案内する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、「車間距離を長く確保する」よう音声案内を行う等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が音声案内の対象となる項目と案内する内容とを特定して音声案内を行う。なお、これに限らず、渋滞軽減走行案内部105は、一律に予め定められた音声案内すべき項目と内容とに従って音声案内を行うようにしてもよい。
【0066】
以上が、渋滞軽減案内処理の処理内容である。上記の渋滞軽減案内処理を行う事によって、ナビゲーション装置100は、経路誘導時に、進行方向の道路が渋滞発生原因となるサグ部等の形状を有する場合に、渋滞が軽減されるように事前に運転者に意識づけることができる。また、渋滞が軽減されるように車両の走行制御を行うことができる。
【0067】
以上、本発明の一実施形態について説明した。
【0068】
本発明の一実施形態によると、ナビゲーション装置100は、道路の形状に応じて、渋滞を軽減するための走行を運転者に伝えることができる。
【0069】
また、車両にACCの機能が搭載されている場合には、ナビゲーション装置100は、渋滞の度合いの緩和に寄与することができる。
【0070】
本発明は、上記実施形態に制限されない。上記実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記実施形態における渋滞軽減走行案内処理について、図7に示す処理内容とすることが可能である。
【0071】
図7の渋滞軽減走行案内処理の処理内容を説明する前に、当該渋滞軽減走行案内処理において用いるサグ部定義テーブル350を、図6を用いて説明する。
【0072】
図6は、第一の実施形態における300について、本実施形態において変形させた例であるサグ部定義テーブル350の構成例を示す図である。本実施形態におけるサグ部定義テーブル350は、道路種別351と、下り坂勾配範囲352と、上り坂勾配範囲353と、曲線半径354と、を含んでいる。なお、サグ部定義テーブル350は、ナビゲーション装置100の記憶装置3に格納される。また、リンクテーブル200に格納されたリンクごとに、当該リンクの形状、とくに水平方向の角度差を特定するための曲線半径に関する情報が格納されているものとする。
【0073】
道路種別351は、第一の実施形態におけるサグ部定義テーブル300の道路種別301と同様であり、下り坂勾配範囲352と上り坂勾配範囲353についても、それぞれサグ部定義テーブル300の下り坂勾配範囲352と上り坂勾配範囲353と同様である。
【0074】
曲線半径354は、垂直方向の高低差によって誘発される制動により生ずる渋滞以外に、水平方向の角度差によって誘発される制動により生ずる渋滞箇所を特定する情報である。すなわち、曲線半径354は、曲がり具合の大きい(つまり水平方向の角度差である曲線半径が所定値以下となる)道路を特定するために用いる曲がりの度合いの所定値を特定する情報である。
【0075】
図7は、経路誘導時において、渋滞を軽減させる案内を使用者に対して実施する渋滞軽減案内処理のフロー図である。このフローは、ナビゲーション装置100が探索した経路を走行している間に、所定の間隔(例えば1分間隔)で開始される。なお、図7に示す渋滞軽減案内処理のフローは、基本的には図5に示した渋滞軽減案内処理と同様であるため、相違する部分の処理について以下に説明する。
【0076】
ステップS001にて現在地を検知した後、サグ部特定部104は、サグ部または急カーブが現在地の近隣にあるか否かを判定する(ステップS102)。具体的には、サグ部特定部104は、まず、設定されている誘導経路に含まれるリンクのうち現在地から所定の距離(例えば、1km)内にあるリンクを、現在地から近い順に対象リンクとして読み出し、あわせて、読み出した対象リンクに続くリンクを後続リンクとして読み出す。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部定義テーブル300に定義されたサグ部としての定義に沿うか否か、および曲線半径の範囲に含まれるか否か、を判定する。そして、サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿う場合、または曲線半径の範囲に含まれる場合には、近隣にサグ部があると判定する。サグ部特定部104は、対象リンクと後続リンクとが、サグ部としての定義に沿わず、かつ、曲線半径の範囲に含まれない場合には、近隣にサグ部は存在しないと判定する。
【0077】
ここで、サグ部特定部104は、対象リンクと後続リンクとが、サグ部にあたるか否か、および曲線半径の範囲に含まれるか否か(急カーブであるか否か)、を判定する処理を以下に説明する。まず、サグ部特定部104は、対象リンクの道路種別と、開始ノードの標高と、終了ノードの標高と、リンク長と、曲線半径とを、リンクテーブル200の道路種別223、標高情報226、リンク長224、曲線半径を読み出してそれぞれ特定する。次に、サグ部特定部104は、開始ノードの標高から終了ノードの標高を差し引いた値がリンク長に占める割合を算出して、勾配の度合いを求める。求めた勾配の度合いが−1%以下であれば、当該対象リンクは上り坂であるため、サグ部特定部104は対象リンクと後続リンクにより構成される当該リンク列がサグ部の定義に沿わないと判定する。サグ部の定義に沿わない場合、サグ部特定部104は、対象リンクの曲線半径が曲線半径354の値により特定される範囲に含まれるか否かを判定し、曲線半径が当該範囲に含まれる場合には、急カーブであるとして、ステップS102の処理を「Yes」で抜ける。曲線半径354の値により特定される範囲にも含まれない場合には、後続リンクを対象リンクとして、また後続リンクに続くリンクを新たに後続リンクとして、サグ部としての定義に沿うか否かを判定する。
【0078】
求めた勾配の度合いが−1%を超える場合は、サグ部特定部104は、当該対象リンクが下り坂または平坦路であるため、サグ部の定義に沿う可能性があるとみなして、サグ部の定義に沿うか否かを精査する。当該精査の処理は、上述の第一実施形態と同様のため、説明を省略する。
【0079】
サグ部または急カーブが現在地の近隣にない場合(ステップS102にて「No」)、主制御部101は、処理をステップS001に戻す。
【0080】
サグ部または急カーブが現在地の近隣にある場合(ステップS102にて「Yes」)、主制御部101は、サグ部または急カーブの渋滞情報を取得する(ステップS103)。具体的には、主制御部101は、ビーコン受信装置11やFM多重放送受信装置10を介して外部から取得した渋滞情報を読み出し、当該サグ部または急カーブを構成するリンクのうち対象リンクの渋滞の度合いを取得する。
【0081】
ACCの設定変更が不要である場合(ステップS006にて「No」)、または車両にACC機能が備わっていない場合(ステップS005にて「No」)、およびACC設定を変更した後(ステップS007実施後)、渋滞軽減走行案内部105は、道路状況、すなわち道路がサグ部であるか、急カーブであるか、等に応じて音声案内を実施する(ステップS108)。
【0082】
具体的には、渋滞軽減走行案内部105は、予め定められた場合分けに基づいて道路の状況に応じて運転者に注意を喚起するよう音声にて案内する。例えば、サグ部の下り坂勾配の度合いが所定の勾配よりも大きい場合、「車間距離を長く確保する」よう音声案内を行う等、予め定められた道路の状況に応じて、渋滞軽減走行案内部105が音声案内の対象となる項目と案内する内容とを特定して音声案内を行う。また、急カーブの場合、「車速を制限速度以下とする」よう音声案内を行う。なお、これに限らず、渋滞軽減走行案内部105は、一律に予め定められた音声案内すべき項目と内容とに従って音声案内を行うようにしてもよい。
【0083】
以上が、渋滞軽減案内処理の変形例である。上記の渋滞軽減案内処理を行う事によって、ナビゲーション装置100は、経路誘導時に、進行方向の道路が渋滞発生原因となるサグ部や急カーブ等の形状を有する場合に、渋滞が軽減されるように事前に運転者に意識づけることができる。また、渋滞が軽減されるように車両の走行制御を行うことができる。
【0084】
また例えば、上記第一の実施形態およびその変形例では、サグ部または急カーブを構成するリンクを特定するために、勾配や曲線半径を用いて定義に沿うか否かを判定して特定するが、これに限られない。
【0085】
例えば、記憶装置3に予めサグ部および急カーブを構成するリンクを特定する情報を記憶しておき、推奨経路を構成するリンク列に当該リンクが含まれるか否かを判定することでサグ部および急カーブを特定するようにしてもよい。
【0086】
このようにすることで、ナビゲーション装置の計算量を減らすことができ、演算処理能力がそれほど高くない演算処理部1を備える軽量・小型のナビゲーション装置等においても応答速度を高くすることが可能となる。
【0087】
また、上記実施形態においては、サグ部を二つのリンクから構成されるリンク列としていたが、これに限らず、二以上のリンクを含んで構成される部分をサグ部としてもよい。具体的には、上記実施形態において特定したサグ部を構成するリンク列と接続されるリンクを、当該リンク列の前後に付加し、サグ部として特定するようにしてもよい。例えば、サグ部として特定されたリンク列を構成するリンクのうち、いずれかのリンク(例えば下り坂のリンク)の勾配と類似する(勾配の差が所定の範囲内である)勾配を有するリンクであって、当該リンク列を構成するリンクの前後の所定距離内に位置するリンクを含めて、サグ部として特定するようにしてもよい。
【0088】
このようにすることで、アップダウンの激しい道路等では、複数のサグ部を至近距離で検出してしまい、渋滞を軽減する走行の案内を短時間のうちに頻繁に行ってしまうことを避けることが可能となる。
【0089】
また、上記実施形態における渋滞軽減案内処理のステップS002において、サグ部を探索する処理において、リンクごとにサグ部であるか否かを判定しているが、これに限られない。すなわち、サグ部特定部104は、所定の区間内の勾配がサグ部定義テーブル300に定められた所定の勾配条件に含まれるか否かによって、サグ部となる区間を特定するようにしてもよい。
【0090】
例えば、サグ部特定部104は、現在地が属する道路に所定の距離(例えば、2km)を有する複数の区間を設定し、当該区間ごとに、最も標高が低い地点を特定して基準点とする。そして、サグ部特定部104は、当該区間の始点(自車から近い方の端)側の所定の地点(例えば、当該道路を構成するリンクのノード)の標高の平均との差である第一の高低差と、当該区間の終点(自車から遠い方の端)側の所定の地点の標高の平均との差である第二の高低差と、をそれぞれ求める。そして、サグ部特定部104は、当該区間の始点から基準点までの距離に対する第一の高低差の割合を算出して第一の勾配とし、基準点から当該区間の終点までの距離に対する第二の高低差の割合を算出して第二の勾配として特定する。そして、サグ部特定部104は、当該道路の道路種別に応じて、第一の勾配がサグ部定義テーブル300に規定する下り坂勾配範囲302に含まれ、かつ、第二の勾配が上り坂勾配範囲303に含まれる場合に、当該区間をサグ部であると特定する。
【0091】
このようにすることで、一つのリンクが細かく(例えばリンクの距離が50mとして)設定されているような複雑な場所においては、所定距離に含まれる膨大な数のリンクに対してサグ部であるか否かを判定する処理の演算量を減らすことが可能となる。
【0092】
また、上記実施形態においては、推奨経路上の所定の区間を対象としてサグ部を探索するが、これに限られない。すなわち、推奨経路が設定されていない状態であっても、サグ部を特定して渋滞軽減案内を行うようにしてもよい。例えば、サグ部特定部104は、ステップS002において、推奨経路が設定されていないことを検知すると、現在地が属する道路上の進行方向の所定距離内(例えば10km内)に含まれる所定の区間を対象としてサグ部を特定するようにしてもよい。もちろん、その他にも、サグ部特定部104は、進行方向を含む所定の方向(進行方向を基準の方向として、左側と右側それぞれ60度までの方向)に含まれる所定距離内の道路を対象としてサグ部を特定するようにしてもよい。
【0093】
このようにすることで、使用者は、特に目的地を決めずにドライブしている場合等においても、渋滞を軽減するための走行の案内を受けることが可能となる。
【0094】
以上、本発明の実施形態の変形例について説明した。
【0095】
本発明の変形例を適用することによって、使用者は、渋滞が発生している箇所に向かって走行する場合に、少しでも渋滞が軽減されるように走行することができる。
【0096】
なお、上記の実施形態では、本発明を車載ナビゲーション装置に適用した例について説明したが、本発明は車載ナビゲーション装置に限らず、ナビゲーション装置全般に適用することができる。
【符号の説明】
【0097】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・主制御部、102・・・入力受付部、103・・・出力処理部、104・・・サグ部特定部、105・・・渋滞軽減走行案内部、200・・・リンクテーブル、300、350・・・サグ部定義テーブル
【特許請求の範囲】
【請求項1】
車両に搭載されるナビゲーション装置であって、
前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段と、
前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手段と、
前記道路特定手段により特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手段と、
前記渋滞原因部分特定手段により特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手段と、
前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、さらに、
推奨経路を誘導する経路誘導手段を備え、
前記渋滞原因部分特定手段は、前記経路誘導手段により誘導する推奨経路に含まれる部分のうち、渋滞の原因となる所定の特徴を備える部分を特定する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置であって、
前記渋滞の原因となる所定の特徴を備える部分は、前記道路を構成する1または複数のリンクにより構成される、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項3に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
サグ部を構成するリンクを、前記渋滞の原因となる所定の特徴を備えるリンクであると特定する、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項3または4に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路を構成するリンク列のうち、第一の所定の勾配の範囲に含まれる下り坂と、当該下り坂に後続する第二の所定の勾配の範囲に含まれる上り坂と、を含む1または複数のリンクを、前記渋滞の原因となる所定の特徴を備えるリンクとして特定する、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路を構成するリンクのうち、第一の所定の勾配の範囲に含まれる下り坂を構成するリンクに、第二の所定の勾配の範囲に含まれる上り坂を構成するリンクが後続して構成される複数のリンク列を、前記渋滞の原因となる所定の特徴を備えるリンクとして検出する、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項5または6に記載のナビゲーション装置であって、
前記第一の所定の勾配の範囲と、前記第二の所定の勾配の範囲と、は、
前記下り坂を構成するリンクの道路の種別を特定する道路種別に応じて予め定められる、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1〜7のいずれか一項に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路の急カーブを構成する部分を、前記渋滞の原因となる所定の特徴を備える部分であると特定し、
予め定められた曲線半径の範囲に属する曲線半径を有する前記道路の部分を、前記急カーブを構成する部分であると特定する、
ことを特徴とするナビゲーション装置。
【請求項9】
請求項8に記載のナビゲーション装置であって、
前記急カーブを構成する部分は、1または連続する複数のリンクにより構成される、
ことを特徴とするナビゲーション装置。
【請求項10】
請求項1〜9のいずれか一項に記載のナビゲーション装置であって、
前記渋滞軽減案内手段は、
前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記渋滞の原因となる所定の特徴を備える前記道路の前記部分の勾配または前記渋滞の原因となる所定の特徴を備える前記道路の前記部分の曲線半径に応じて、予め定められた渋滞を軽減するための走行案内を行う、
ことを特徴とするナビゲーション装置。
【請求項11】
請求項10に記載のナビゲーション装置であって、
前記渋滞を軽減するための走行案内においては、ナビゲーション装置が搭載されている車両の自動走行機能の設定値を変更する、
ことを特徴とするナビゲーション装置。
【請求項12】
請求項11に記載のナビゲーション装置であって、
前記渋滞軽減案内手段は、
前記走行案内において、前記自動走行機能の標準よりも長い車間距離を設定すること、
を特徴とするナビゲーション装置。
【請求項13】
請求項10〜12のいずれか一項に記載のナビゲーション装置であって、
前記渋滞を軽減するための走行案内においては、音声による使用者への運転操作の案内を実施する、
ことを特徴とするナビゲーション装置。
【請求項14】
車両に搭載されるナビゲーション装置のナビゲーション方法であって、
前記ナビゲーション装置は、
前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段を備え、
前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手順と、
前記道路特定手順において特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手順と、
前記渋滞原因部分特定手順において特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手順と、
前記渋滞判定手順において前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手順と、
を備えることを特徴とするナビゲーション方法。
【請求項1】
車両に搭載されるナビゲーション装置であって、
前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段と、
前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手段と、
前記道路特定手段により特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手段と、
前記渋滞原因部分特定手段により特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手段と、
前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、さらに、
推奨経路を誘導する経路誘導手段を備え、
前記渋滞原因部分特定手段は、前記経路誘導手段により誘導する推奨経路に含まれる部分のうち、渋滞の原因となる所定の特徴を備える部分を特定する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置であって、
前記渋滞の原因となる所定の特徴を備える部分は、前記道路を構成する1または複数のリンクにより構成される、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項3に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
サグ部を構成するリンクを、前記渋滞の原因となる所定の特徴を備えるリンクであると特定する、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項3または4に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路を構成するリンク列のうち、第一の所定の勾配の範囲に含まれる下り坂と、当該下り坂に後続する第二の所定の勾配の範囲に含まれる上り坂と、を含む1または複数のリンクを、前記渋滞の原因となる所定の特徴を備えるリンクとして特定する、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路を構成するリンクのうち、第一の所定の勾配の範囲に含まれる下り坂を構成するリンクに、第二の所定の勾配の範囲に含まれる上り坂を構成するリンクが後続して構成される複数のリンク列を、前記渋滞の原因となる所定の特徴を備えるリンクとして検出する、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項5または6に記載のナビゲーション装置であって、
前記第一の所定の勾配の範囲と、前記第二の所定の勾配の範囲と、は、
前記下り坂を構成するリンクの道路の種別を特定する道路種別に応じて予め定められる、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1〜7のいずれか一項に記載のナビゲーション装置であって、
前記渋滞原因部分特定手段は、
前記道路の急カーブを構成する部分を、前記渋滞の原因となる所定の特徴を備える部分であると特定し、
予め定められた曲線半径の範囲に属する曲線半径を有する前記道路の部分を、前記急カーブを構成する部分であると特定する、
ことを特徴とするナビゲーション装置。
【請求項9】
請求項8に記載のナビゲーション装置であって、
前記急カーブを構成する部分は、1または連続する複数のリンクにより構成される、
ことを特徴とするナビゲーション装置。
【請求項10】
請求項1〜9のいずれか一項に記載のナビゲーション装置であって、
前記渋滞軽減案内手段は、
前記渋滞判定手段により前記所定の渋滞の度合いを超えると判定された場合に、前記渋滞の原因となる所定の特徴を備える前記道路の前記部分の勾配または前記渋滞の原因となる所定の特徴を備える前記道路の前記部分の曲線半径に応じて、予め定められた渋滞を軽減するための走行案内を行う、
ことを特徴とするナビゲーション装置。
【請求項11】
請求項10に記載のナビゲーション装置であって、
前記渋滞を軽減するための走行案内においては、ナビゲーション装置が搭載されている車両の自動走行機能の設定値を変更する、
ことを特徴とするナビゲーション装置。
【請求項12】
請求項11に記載のナビゲーション装置であって、
前記渋滞軽減案内手段は、
前記走行案内において、前記自動走行機能の標準よりも長い車間距離を設定すること、
を特徴とするナビゲーション装置。
【請求項13】
請求項10〜12のいずれか一項に記載のナビゲーション装置であって、
前記渋滞を軽減するための走行案内においては、音声による使用者への運転操作の案内を実施する、
ことを特徴とするナビゲーション装置。
【請求項14】
車両に搭載されるナビゲーション装置のナビゲーション方法であって、
前記ナビゲーション装置は、
前記車両の現在地と前記車両の走行方向とを特定する走行状況特定手段を備え、
前記走行状況特定手段により特定した現在地から前記走行方向にある道路を特定する道路特定手順と、
前記道路特定手順において特定した道路のうち、渋滞の原因となる所定の特徴を備える部分を特定する渋滞原因部分特定手順と、
前記渋滞原因部分特定手順において特定した前記道路の前記部分の渋滞度合いを取得して、所定の渋滞の度合いを超えるか否かを判定する渋滞判定手順と、
前記渋滞判定手順において前記所定の渋滞の度合いを超えると判定された場合に、前記道路の前記部分が備える特徴に応じて渋滞を軽減しうる走行案内を行う渋滞軽減案内手順と、
を備えることを特徴とするナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−255758(P2012−255758A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−130353(P2011−130353)
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]