
ナビゲーション装置の経路探索方法、およびナビゲーション装置
【課題】ナビゲーション装置において、目的地が設定されてから推奨経路を提示するまでの時間を短縮させる。
【解決手段】車両に搭載されるナビゲーション装置に、リンク情報を記憶した記憶装置3と、演算処理部1とを設ける。そして、演算処理部1に車両の停止を検知する処理と、車両の停止を検知する処理と、車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出する処理と、検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索する処理と、目的地の設定を受付ける処理と、目的地の設定を受け付けた場合にリンク情報を利用して、交差点から目的地までの経路を探索し、探索した現在位置から交差点までの経路と、探索した交差点から目的地までの経路とからなる経路を推奨経路として特定する処理と、を実行させる。
【解決手段】車両に搭載されるナビゲーション装置に、リンク情報を記憶した記憶装置3と、演算処理部1とを設ける。そして、演算処理部1に車両の停止を検知する処理と、車両の停止を検知する処理と、車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出する処理と、検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索する処理と、目的地の設定を受付ける処理と、目的地の設定を受け付けた場合にリンク情報を利用して、交差点から目的地までの経路を探索し、探索した現在位置から交差点までの経路と、探索した交差点から目的地までの経路とからなる経路を推奨経路として特定する処理と、を実行させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に車載用ナビゲーション装置の経路探索の技術に関する。
【背景技術】
【0002】
ナビゲーション装置には、リンク情報を用いて、現在位置から設定された目的地までの推奨経路を探索するものが知られている(例えば特許文献1)。特許文献1に記載のナビゲーション装置では、利用者からの目的地の設定を受付け、設定された目的地までの推奨経路の探索を開始している。
【0003】
【特許文献1】特開平6−331379号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ナビゲーション装置では、ダイクストラ法等を用いて最適なコストで目的地に到達できる経路を探索する処理が行われている。これらの経路探索処理は、一般的に時間がかかることが多い。また、利用者は、目的地を設定してから短時間で推奨経路が提示されることを望んでいると考えられる。
【0005】
しかしながら、特許文献1では、利用者が行う目的地の設定処理を簡略化することについては考慮されているが、設定された目的地までの経路を利用者に短時間で提供することについて特に考慮されていない。
【0006】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、ナビゲーション装置において、目的地を設定してから推奨経路を提示するまでの時間を短縮することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一態様は、車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置に適用される。そして、前記ナビゲーション装置は、前記車両の停止を検知するステップと、前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出するステップと、前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索するステップと、目的地の設定を受付けるステップと、前記目的地の設定を受け付けた場合に、前記交差点から前記目的地までの経路を前記リンク情報を利用して探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定するステップと、を実行する。
【0008】
また、上記課題を解決するため、本発明の他の態様は、車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置に適用される。ここで、前記ナビゲーション装置には、表示装置が接続されている。
【0009】
そして、前記ナビゲーション装置は、前記車両の現在位置を検出するステップと、利用者からの目的地の入力を受け付けるステップと、前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための画面を前記表示装置に表示するステップと、利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するステップと、前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索するステップと、前記目的地が設定された場合に前記探索された経路を推奨経路として特定するステップと、を実行する。
【発明の効果】
【0010】
このように本発明によれば、ナビゲーション装置が、車両の停止を検知した場合あるいは自身が起動された場合に車両の現在位置を検出し、検出した現在位置から所定距離の範囲内にある交差点を求め、現在位置から求めた交差点までの経路を探索するようにしている。そして、ナビゲーション装置は、目的地の設定を受け付けた場合、既に探索した現在位置から求めた交差点までの経路を利用して目的地までの推奨経路を探索するようにしている。
【0011】
そのため、目的地の設定を受け付けた場合、現在位置から所定範囲の交差点までの経路探索を行う処理を省略でき、結果的に目的地までの推奨経路の探索時間を短縮することができる。
【0012】
また、本発明の他の態様では、利用者からの目的地の入力を受け付けた場合、利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するようにしている。そして、本発明の他の態様によれば、目的地が設定される前の目的地の入力を受け付けた段階で、その目的地までの経路探索を開始するようにしている。
【0013】
そのため、目的地が設定された場合、既に、その目的地までの推奨経路の探索が開始されているため、目的地が最終的に設定されてからの探索時間を短縮することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態について図面を用いて説明する。
【0015】
最初に本実施形態が適用された車載用ナビゲーション装置の概略構成について図1を用いて説明する。
【0016】
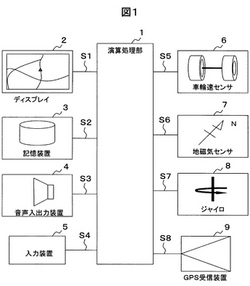
図1は、本発明の実施形態が適用された車載用ナビゲーション装置(以下において単に「ナビゲーション装置」という)の概略構成図である。
【0017】
図示するように、ナビゲーション装置は、演算処理部1と、ディスプレイ2と、地図データ等が記憶された記憶装置3と、音声入出力装置4と、入力装置5と、車輪速センサ6と、地磁気センサ7と、ジャイロ8と、GPS(Global Positioning System)受信装置9とを有する。
【0018】
演算処理部1は、ナビゲーション装置が利用者に提供する各種情報を処理するための中心的ユニットである。例えば、各種センサ6〜8やGPS受信装置9から出力される情報を基にして現在位置を検出する。演算処理部1は、検出した現在位置の周辺の地図データを記憶装置3から読み出して、その読み出した地図データをグラフィックス展開し、そこに現在位置を示すマークを重ねてディスプレイ2に表示する。
【0019】
また、演算処理部1は、目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索する処理を行う。そして、演算処理部1は、目的地が設定された場合に、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの推奨経路の探索を実行する。なお、目的地までの推奨経路の探索処理については後段で詳細に説明する。
【0020】
ディスプレイ2は、演算処理部1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。また、演算処理部1とディスプレイ2との間の信号S1は、RGB信号やNTSC(National TV Standards Committee)信号で接続するのが一般的である。
【0021】
記憶装置3は、日本列島の全体図から全国各市町村の詳細図まで多段階の縮尺図に対応した地図データ等のデータを記憶するユニットである。なお、記憶装置3には、例えば、DVD装置やハードディスク装置を用いることができる。
【0022】
ここで地図データの構成を説明する。
【0023】
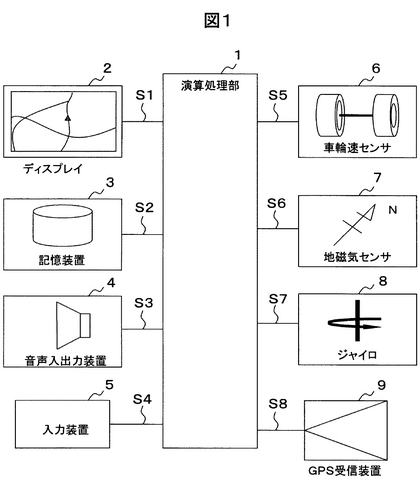
図2は、記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。
【0024】
図示するように、地図データ310は、地図を複数に分割することで得られるメッシュ領域毎に分類されている。地図データ310は、メッシュ領域を識別するためのメッシュID311、および、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ312を有する。また、地図データ310は、メッシュID311毎に、そのメッシュIDにより特定されるメッシュ領域のリンクデータ312のデータサイズ(メッシュサイズ)を対応付けたメッシュサイズリスト330が含まれている。
【0025】
リンクデータ312は、リンクを識別するためのリンクID3121、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報3122、リンクが属する道路が「有料道路」であるか「一般道路」であるかを示す道路種別3123、リンクの長さを示すリンク長情報3124、リンクの旅行時間(或いは移動時間)情報3125、および2つのノード(開始ノード、終了ノード)にそれぞれ接続するリンクのリンクID(接続リンクID)3126などを有する。
【0026】
メッシュサイズリスト330は、演算処理部1が経路探索を行う際、記憶装置3から読み出す地図データのデータサイズを確認するために用いられる。具体的には、演算処理部1は、ナビゲーション装置が起動された際、記憶装置3からメッシュサイズリスト312を読み出して保持しておく。なお、地図データ310には、対応するメッシュ領域に含まれている道路以外の地図構成物の情報(名称、種別、座標情報など)も含まれている。
【0027】
図1に戻り、説明を続ける。音声入出力装置4は、演算処理部1で生成した利用者へのメッセージを音声信号に変換して出力すると共に、利用者が発した声を認識し、認識した内容を演算処理部1に転送する。
【0028】
入力装置5は、ナビゲーション装置の各種機能選択、目的地設定等の利用者からの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ2上に貼られたタッチパネルなどで構成される。
【0029】
センサ6〜8およびGPS受信装置9は、ナビゲーション装置が現在位置を検出するために使用するものである。車輪速センサ6は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。地磁気センサ7は、地球が保持している磁気を検知し、移動体が向かっている方角を検出する。ジャイロ8は、光ファイバジャイロや振動ジャイロで構成され、移動体が回転した角度を検出する。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0030】
続いて、上述したナビゲーション装置の演算処理部1が有する機能について図3を用いて説明する。
【0031】
図3は、本実施形態の演算処理部1の機能構成を説明するための図である。
【0032】
図示するように、演算処理部1は、設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、グラフィックス処理部17、およびメッシュサイズリスト取得部18を有する。
【0033】
設定部10は、入力装置5或いは音声入出力装置4に入力された利用者からの要求を受け付け、その要求された内容に対応する処理が実行されるように演算処理部1を制御する。例えば、利用者が、入力装置5を介して目的地に向うための推奨経路の探索を要求した場合、現在位置から目的地までの推奨経路を探索する処理を経路探索部14に要求する。
【0034】
現在位置検出部11は、車輪速センサ6で計測される距離パルスデータS5およびジャイロセンサ8で計測される角速度データS7を各々積分した結果得られる距離データおよび角度データを用いて、そのデータを時間軸で積分していくことにより、初期値(X,Y)から自車走行後の位置である現在位置(X´,Y´)を定期的に演算する。現在位置検出部11は、上記算出した現在位置を地図表示処理部16に出力すると共に、上記算出した現在位置を所定の算出回数毎にマップマッチ処理部13に出力する。また、現在位置検出部11は、後述するマップマッチ処理部13から現在位置の補正データを取得した場合、その現在位置の補正データを地図表示処理部16に出力する。さらに、現在位置検出部11は、経路誘導部15からの現在位置を要求された場合、経路誘導部15に現在位置(或いは現在位置の補正データ)を出力する。
【0035】
ここで、現在位置検出部11は、自車の回転した角度と進む方向との関係を一致させるため、地磁気センサ7から得られた方位データS6と、ジャイロ8から得られ角速度データS7を積分した角度データを参照して、自車が進行している方向の絶対方位を推定する。現在位置検出部11は、車輪速センサ6のデータS5およびジャイロ8のデータS7を各々積分していくと、誤差が蓄積するため、ある時間でGPS受信装置9から得られた位置データS8をもとに蓄積した誤差をキャンセルする処理を施し、現在位置のデータを求める。
【0036】
データ読出部12は、ディスプレイ2に表示が要求される領域や、経路探索のために要求される領域(現在位置および目的地を含む)にある地図データ31を記憶装置3から読み出す。
【0037】
マップマッチ処理部13は、データ読出部12が読みだした現在位置周辺の地図データと、現在位置検出部11が定期的に検出する現在位置を合わせ込むマップマッチ処理を行う。マップマッチ処理部13は、定期的に現在位置を補正し、補正した現在位置を示すデータを現在位置検出部11に出力する。
【0038】
経路探索部14は、ダイクストラ法等を用いて、2地点(例えば、現在位置および目的地)を結ぶ最適なコストで目的地に到達する経路をリンクデータ312(図2参照)を用いて探索する。経路探索部14は、探索の結果得られた経路を推奨経路として、ディスプレイ2に表示させるために地図表示処理部16に推奨経路を示すデータを出力する。また、経路探索部14は、探索された推奨経路を示すデータを経路誘導部15に出力する。
【0039】
さらに、本実施形態の経路探索部14は、ナビゲーション装置が起動された際に、記憶装置3に記憶されている地図データ310の中のメッシュサイズリスト310を、データ読出部12を介して取得する。そして、経路探索部14は、取得したメッシュサイズリスト310をRAM22(図4参照)の所定領域に格納する。経路探索部14は、経路探索を行う際、RAM22の所定領域に格納されているメッシュサイズリスト330を参照し、経路探索に利用するメッシュのリンクデータ312を、RAM22上に展開できるか否かを確認する。経路探索部14は、経路探索に利用するメッシュのリンクデータ312がRAM22上に展開できると確認されてからそのリンクデータ312を、データ読込部12を介して取得する。
【0040】
このように、本実施形態では、ナビゲーション装置が起動された場合、経路探索部14は、記憶装置3からメッシュサイズリスト330を読み出し、RAM22の所定領域に格納するようにしている。そして、経路探索部14は、リンクデータ312を取得する際、RAM22に格納されているメッシュサイズリスト330を参照することで、リンクデータ312をRAM22上に展開できるか否かを確認するようにしている。すなわち、本実施形態では、リンクデータ312を取得する際、リンクデータ312をRAM22上に展開できるか否かを記憶装置3にアクセスすることなく実現することができる。すなわち、本実施形態では、経路探索処理の際の行われるリンクデータ312の取得処理の時間を短縮することができる。
【0041】
また、本実施形態の経路探索部14は、設定部10が利用者からの目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索する処理を行う。そして、経路探索部14は、目的地が設定された場合、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの推奨経路の探索を実行する。このように、本実施形態では、目的地の設定を受け付ける前の段階で、車両の現在位置周辺の経路探索を行うようにしている。そのため、目的地が設定された場合に、目的地までの推奨経路を探索する探索時間を省略することができる。
【0042】
経路誘導部15は、探索された推奨経路を通って目的地に到達するように利用者を誘導する。具体的には、経路誘導部15は、自車位置検出部11から定期的に現在位置を取得する。そして、経路誘導部15は、取得した現在位置と、経路探索部14から取得した推奨経路を示すデータと、データ読出部12を介して記憶装置3から読込んだ地図データとを用いて利用者を目的地まで誘導する。なお、本実施形態では、経路誘導部15が行う目的地まで利用者を誘導する具体的方法について特に限定しない。例えば、経路誘導部15は、経路探索部14が探索した推奨経路を地図上に重ねた画面をディスプレイ2に表示しておいて、車両が推奨経路上を走行するために必要な情報(たとえば、次の交差点を曲がるべきか否かなどの情報)を、音声入出力装置4を介して利用者に知らせるようにする。
【0043】
地図表示処理部16は、ディスプレイ2に表示が要求される領域にある地図データ310を記憶装置3からデータ読出部12を介して受け取る。地図表示処理部16は、経路探索部14から探索した推奨経路を受け取り、現在位置検出部11から現在位置の情報を受け取る。そして、地図表示処理部16は、道路、その他の地図構成物、現在位置、目的地、および経路誘導のための矢印といったマーク等をディスプレイ2の画面に描画させるための地図描画コマンドを生成し、グラフィックス処理部17に出力する。
【0044】
グラフィックス処理部17は、地図表示処理部16で生成された地図描画コマンドを用いてディスプレイ2の画面上に画像データを表示させる。
【0045】
続いて、本実施形態の演算処理部1のハードウェア構成を説明する。
【0046】
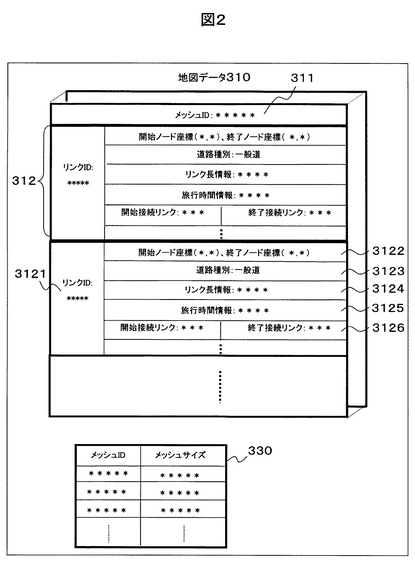
図4は、演算処理部1のハードウェア構成を示す図である。
【0047】
図示するように、演算処理部1は、CPU(中央演算処理装置)21と、CPU21が実行するプログラムやデータを一時的に記憶するRAM(Random Access Memory)22と、上記各部(設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、およびグラフィックス処理部17)が有する機能を実行するためのプログラムが予め記憶されているROM(Read Only Memory)23と、メモリ間およびメモリと各デバイスとの間のデータを転送するDMA(Direct Memory Access)24と、グラフィック描画を実行し且つ表示制御を行う描画コントローラ25と、グラフィックスイメージデータを蓄えるVRAM(Video Random Access Memory)26と、イメージデータをRGB信号に変換するカラーパレット27と、アナログ信号をデジタル信号に変換するA/D変換器28と、シリアル信号をバスに同期したパラレル信号に変換するSCI(Serial Communication Interface)29と、パラレル信号をバスに同期させてバス上に載せるPIO(Parallel Input/Output)30と、パルス信号を積分するカウンタ31と、を有する。そして、上記各部(設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、およびグラフィックス処理部17)の機能は、CPU21が、ROM23に記憶されている上記各部が有する機能を実行するためのプログラを、RAM22にロードし、実行することにより実現される。
【0048】
続いて、本実施形態のナビゲーション装置が行う推奨経路を探索する処理について説明する。最初にナビゲーション装置が起動された際に行う経路探索処理について説明する。
【0049】
図5は、本実施形態のナビゲーション装置が起動された際に行う経路探索処理のフローを説明するための図である。
【0050】
さて、演算処理部1の経路探索部14は、ナビゲーション装置が起動された場合に、以下の処理を開始する(S100)。
【0051】
最初に、経路探索部14は、記憶装置3に記憶されているメッシュサイズリスト330をデータ読出部12を介して取得し、RAM22の所定領域に格納する(S101)。このメッシュサイズリスト330は、経路探索部14が、経路探索に必要なメッシュのリンクデータ312をデータ読出部12を介して取得するたびに利用される。
【0052】
続いて、経路探索部14は、現在位置検出部11から車両の現在位置を取得して、現在位置周辺から所定距離の範囲に存在する交差点を求める。そして、経路探索部14は、現在位置から求めた交差点までの経路を探索する(S102)。
【0053】
具体的には、経路探索部14は、現在位置から所定の距離の範囲に含まれるメッシュを特定する。経路探索部14は、記憶装置3から特定したメッシュのリンクデータ312をデータ読出部12を介して取得する。なお、経路探索部14は、特定したメッシュのリンクデータ312を取得する場合、RAM22の所定領域に格納したメッシュサイズリスト330を参照する。経路探索部14は、メッシュサイズリスト330に対応付けられている特定したメッシュのリンクデータ312のデータサイズおよびRAM22の容量を確認し、RAM22に展開可能なリンクデータ312を順次取得していく。
【0054】
そして、経路探索部14は、取得したリンクデータ312を用いて現在位置から所定の距離範囲に存在する交差点を求める。経路探索部14は、取得したリンクデータ312を用いて、現在位置から上記の求めた交差点までの経路の探索を行う。なお、現在位置から所定の距離範囲に複数の交差点がある場合、経路探索部14は、複数ある交差点の各々について、現在位置から各交差点までの経路を探索する。そして、経路探索部14は、探索した現在位置から交差点までの経路を保持しておく。
【0055】
続いて、経路探索部14は、利用者からの目的地の入力を設定部10か介して受け付けた場合にS104に進む(S103)。
【0056】
S104では、経路探索部14は、入力した目的地に誤りがあるか否かについての確認を利用者から受け付けるための画面(確認画面)をディスプレイ2に表示する。さらに、経路探索部14は、利用者からの目的地に誤りがないことを示すデータ(目的地確定データ)を受け付ける前の段階で、S103で受け付けた目的地までの推奨経路の探索を開始する。
【0057】
具体的には、経路探索部14は、現在位置および受け付けた目的地を用いて経路探索に利用するためのメッシュを特定する。経路探索部14は、RAM22に格納されているメッシュサイズリスト330を参照して、メッシュサイズリスト330に対応付けられている特定したメッシュのリンクデータのデータサイズおよびRAM22に展開可能なデータサイズを確認する。経路探索部14は、確認の結果、RAM22に展開可能なリンクデータ312をデータ読出部12を介して順次取得する。経路探索部14は、取得したリンクデータ312を用いて、S102で求めた交差点から目的地までの経路を探索する。さらに、経路探索部14は、S102で求めた現在位置から交差点までの経路と、上記で求めた交差点から目的地までの経路とからなる経路を求める。
【0058】
続いて、経路探索部14は、利用者からの「目的地確定データ」を受け付けた場合にS106の処理に進む。ここで、経路探索部14は、S104において開始した経路の探索が終了していない場合には、その処理を継続して行うこととする。一方、経路探索部14は、利用者からの「目的地に誤りがある旨を示すデータ」を受け付けた場合、S104において開始した経路の探索処理を中止して、或いは、既に経路の探索処理が終了している場合には探索した経路をクリア(消去)して、S103の処理に戻る。
【0059】
S106では、経路探索部14は、S104において開始した経路の探索処理の結果得られた経路を推奨経路として特定して、特定した推奨経路をディスプレイ2に表示する。また、経路探索部14は、特定した推奨経路を経路誘導部15に出力して処理を終了する。
【0060】
なお、上記説明では、利用者がナビゲーション装置に目的地を示すデータを入力する場合を例にしているが特にこれに限定するものではない。例えば、設定部10に「住所」、「電話番号」等の検索条件を受け付け、受け付けた検索条件にしたがい目的地を検索する検索機能を設けておく。設定部10は、検索機能により目的地が検索された場合、検索された目的地を経路探索部14に出力する。そして、経路探索部14は、設定部10が検索した目的地の確認を利用者から受け付ける前の段階で、設定部10から受け付けた目的地までの経路探索を開始するようにしてもよい。
【0061】
続いて、本実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理について説明する。
【0062】
図6は、本実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理を説明するための図である。
【0063】
さて、ナビゲーション装置の経路探索部14は、車速センサ(図示しない)からの情報を定期的に取得して車両が停止しているか否かの検知を行う(S200)。経路探索部14は、車両が停止していることを検知した場合には、S102の処理に進む。一方、経路探索部14は、車両が停止していることを検知しない場合にはS200の処理を繰り返す。
【0064】
その後、経路探索部14は、図5で説明したS102〜S106と同じ処理を行う。
【0065】
このように、本実施形態では、ナビゲーション装置が起動された場合に、経路探索部14が、記憶装置3からメッシュサイズリスト330を読み出し、RAM22の所定領域に格納するようにしている。そのため、経路探索部14は、経路探索を行う際に、探索に必用なメッシュのリンクデータをRAM22上に展開できるか否を確認する処理を記憶装置3にアクセスすることなく実現することができる。そのため、本実施形態では、結果的に、経路探索処理の時間を短縮することができる。
【0066】
また、本実施形態の経路探索部14は、設定部10が利用者からの目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索しておくようにしている。そして、経路探索部14は、目的地が設定された場合、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの経路探索を実行する。すなわち、本実施形態では、目的地の設定を受け付ける前の段階で、車両の現在位置周辺の経路探索を行うようにしている。そのため、目的地が設定された場合に、現在位置から交差点までの経路探索を省略できるため、結果的に目的地までの推奨経路を探索する探索時間を短縮することができる。
【0067】
さらに、本実施形態では、目的地の設定をナビゲーション装置が受け付ける際、入力した目的地に誤りがないかの確認を利用者から受け付ける前の段階で、目的地までの経路探索を開始するようにしている。そのため、利用者からの目的地の確認を受け付けた場合、既に、その目的地までの推奨経路の探索が開始されていることとなる。そのため、本実施形態によれば、目的地が最終的に設定されてからの探索時間を短縮することができる。
【0068】
このように、本実施形態によれば、ナビゲーション装置において、目的地を設定してから推奨経路を利用者に提示するまでの時間を短縮することたできる。
【0069】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、本実施形態では、目的地が設定された場合に、予め、目的地が設定される前に探索しておいた現在位置から交差点までの経路を利用して経路探索するようにしているが、特にこれの限定されるものではない。例えば、経路探索部14は、目的地までの推奨経路を探索する際に採用されなかった候補経路を、最終的に採用された推奨経路の誘導が開始された後にも保持しておくようにする。そして、経路探索部14は、車両の逸脱が検出した場合に、保持している経路候補を利用して目的地までの経路を再探索する処理を行うようにしてもよい。このように一度探索しておいた経路候補を再利用することにより、オートリルートを行う際の探索時間を短縮させることができる。
【0070】
また、本実施形態では、目的地が設定される前の段階で、現在位置から所定範囲の交差点までの経路を探索するようにしているが特にこれに限定しない。例えば、現在位置から主要道路までの経路を探索するようにしてもよい。
【図面の簡単な説明】
【0071】
【図1】本発明の実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の記憶装置に記憶されている地図データのデータ構造を模擬的に示す図である。
【図3】本発明の実施形態の演算処理部の機能構成を説明するための図である。
【図4】本発明の実施形態の演算処理部のハードウェア構成を示す図である。4
【図5】本発明の実施形態のナビゲーション装置が起動された際に行う経路探索処理のフローを説明するための図である。
【図6】本発明の実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理を説明するための図である。
【符号の説明】
【0072】
1…演算処理部、2…ディスプレイ、3…記憶装置、4…音声入出力装置、5…入力装置、6…車輪速センサ、7…地磁気センサ、8…ジャイロ、9…GPS受信装置、10…設定部、11…現在位置検出部、12…データ読出部、13…マップマッチ処理部、14…経路探索部、15…経路誘導部、16…地図表示処理部、17…グラフィックス処理部、21…CPU、22…RAM、23…ROM、24…DMA、25…描画コントローラ、26…VRAM、27…カラーパレット、28…A/D変換器、29…SCI、30…PIO、31…カウンタ
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に車載用ナビゲーション装置の経路探索の技術に関する。
【背景技術】
【0002】
ナビゲーション装置には、リンク情報を用いて、現在位置から設定された目的地までの推奨経路を探索するものが知られている(例えば特許文献1)。特許文献1に記載のナビゲーション装置では、利用者からの目的地の設定を受付け、設定された目的地までの推奨経路の探索を開始している。
【0003】
【特許文献1】特開平6−331379号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ナビゲーション装置では、ダイクストラ法等を用いて最適なコストで目的地に到達できる経路を探索する処理が行われている。これらの経路探索処理は、一般的に時間がかかることが多い。また、利用者は、目的地を設定してから短時間で推奨経路が提示されることを望んでいると考えられる。
【0005】
しかしながら、特許文献1では、利用者が行う目的地の設定処理を簡略化することについては考慮されているが、設定された目的地までの経路を利用者に短時間で提供することについて特に考慮されていない。
【0006】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、ナビゲーション装置において、目的地を設定してから推奨経路を提示するまでの時間を短縮することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一態様は、車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置に適用される。そして、前記ナビゲーション装置は、前記車両の停止を検知するステップと、前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出するステップと、前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索するステップと、目的地の設定を受付けるステップと、前記目的地の設定を受け付けた場合に、前記交差点から前記目的地までの経路を前記リンク情報を利用して探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定するステップと、を実行する。
【0008】
また、上記課題を解決するため、本発明の他の態様は、車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置に適用される。ここで、前記ナビゲーション装置には、表示装置が接続されている。
【0009】
そして、前記ナビゲーション装置は、前記車両の現在位置を検出するステップと、利用者からの目的地の入力を受け付けるステップと、前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための画面を前記表示装置に表示するステップと、利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するステップと、前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索するステップと、前記目的地が設定された場合に前記探索された経路を推奨経路として特定するステップと、を実行する。
【発明の効果】
【0010】
このように本発明によれば、ナビゲーション装置が、車両の停止を検知した場合あるいは自身が起動された場合に車両の現在位置を検出し、検出した現在位置から所定距離の範囲内にある交差点を求め、現在位置から求めた交差点までの経路を探索するようにしている。そして、ナビゲーション装置は、目的地の設定を受け付けた場合、既に探索した現在位置から求めた交差点までの経路を利用して目的地までの推奨経路を探索するようにしている。
【0011】
そのため、目的地の設定を受け付けた場合、現在位置から所定範囲の交差点までの経路探索を行う処理を省略でき、結果的に目的地までの推奨経路の探索時間を短縮することができる。
【0012】
また、本発明の他の態様では、利用者からの目的地の入力を受け付けた場合、利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するようにしている。そして、本発明の他の態様によれば、目的地が設定される前の目的地の入力を受け付けた段階で、その目的地までの経路探索を開始するようにしている。
【0013】
そのため、目的地が設定された場合、既に、その目的地までの推奨経路の探索が開始されているため、目的地が最終的に設定されてからの探索時間を短縮することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態について図面を用いて説明する。
【0015】
最初に本実施形態が適用された車載用ナビゲーション装置の概略構成について図1を用いて説明する。
【0016】
図1は、本発明の実施形態が適用された車載用ナビゲーション装置(以下において単に「ナビゲーション装置」という)の概略構成図である。
【0017】
図示するように、ナビゲーション装置は、演算処理部1と、ディスプレイ2と、地図データ等が記憶された記憶装置3と、音声入出力装置4と、入力装置5と、車輪速センサ6と、地磁気センサ7と、ジャイロ8と、GPS(Global Positioning System)受信装置9とを有する。
【0018】
演算処理部1は、ナビゲーション装置が利用者に提供する各種情報を処理するための中心的ユニットである。例えば、各種センサ6〜8やGPS受信装置9から出力される情報を基にして現在位置を検出する。演算処理部1は、検出した現在位置の周辺の地図データを記憶装置3から読み出して、その読み出した地図データをグラフィックス展開し、そこに現在位置を示すマークを重ねてディスプレイ2に表示する。
【0019】
また、演算処理部1は、目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索する処理を行う。そして、演算処理部1は、目的地が設定された場合に、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの推奨経路の探索を実行する。なお、目的地までの推奨経路の探索処理については後段で詳細に説明する。
【0020】
ディスプレイ2は、演算処理部1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。また、演算処理部1とディスプレイ2との間の信号S1は、RGB信号やNTSC(National TV Standards Committee)信号で接続するのが一般的である。
【0021】
記憶装置3は、日本列島の全体図から全国各市町村の詳細図まで多段階の縮尺図に対応した地図データ等のデータを記憶するユニットである。なお、記憶装置3には、例えば、DVD装置やハードディスク装置を用いることができる。
【0022】
ここで地図データの構成を説明する。
【0023】
図2は、記憶装置3に記憶されている地図データのデータ構造を模擬的に示す図である。
【0024】
図示するように、地図データ310は、地図を複数に分割することで得られるメッシュ領域毎に分類されている。地図データ310は、メッシュ領域を識別するためのメッシュID311、および、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ312を有する。また、地図データ310は、メッシュID311毎に、そのメッシュIDにより特定されるメッシュ領域のリンクデータ312のデータサイズ(メッシュサイズ)を対応付けたメッシュサイズリスト330が含まれている。
【0025】
リンクデータ312は、リンクを識別するためのリンクID3121、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報3122、リンクが属する道路が「有料道路」であるか「一般道路」であるかを示す道路種別3123、リンクの長さを示すリンク長情報3124、リンクの旅行時間(或いは移動時間)情報3125、および2つのノード(開始ノード、終了ノード)にそれぞれ接続するリンクのリンクID(接続リンクID)3126などを有する。
【0026】
メッシュサイズリスト330は、演算処理部1が経路探索を行う際、記憶装置3から読み出す地図データのデータサイズを確認するために用いられる。具体的には、演算処理部1は、ナビゲーション装置が起動された際、記憶装置3からメッシュサイズリスト312を読み出して保持しておく。なお、地図データ310には、対応するメッシュ領域に含まれている道路以外の地図構成物の情報(名称、種別、座標情報など)も含まれている。
【0027】
図1に戻り、説明を続ける。音声入出力装置4は、演算処理部1で生成した利用者へのメッセージを音声信号に変換して出力すると共に、利用者が発した声を認識し、認識した内容を演算処理部1に転送する。
【0028】
入力装置5は、ナビゲーション装置の各種機能選択、目的地設定等の利用者からの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ2上に貼られたタッチパネルなどで構成される。
【0029】
センサ6〜8およびGPS受信装置9は、ナビゲーション装置が現在位置を検出するために使用するものである。車輪速センサ6は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。地磁気センサ7は、地球が保持している磁気を検知し、移動体が向かっている方角を検出する。ジャイロ8は、光ファイバジャイロや振動ジャイロで構成され、移動体が回転した角度を検出する。GPS受信装置9は、GPS衛星からの信号を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0030】
続いて、上述したナビゲーション装置の演算処理部1が有する機能について図3を用いて説明する。
【0031】
図3は、本実施形態の演算処理部1の機能構成を説明するための図である。
【0032】
図示するように、演算処理部1は、設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、グラフィックス処理部17、およびメッシュサイズリスト取得部18を有する。
【0033】
設定部10は、入力装置5或いは音声入出力装置4に入力された利用者からの要求を受け付け、その要求された内容に対応する処理が実行されるように演算処理部1を制御する。例えば、利用者が、入力装置5を介して目的地に向うための推奨経路の探索を要求した場合、現在位置から目的地までの推奨経路を探索する処理を経路探索部14に要求する。
【0034】
現在位置検出部11は、車輪速センサ6で計測される距離パルスデータS5およびジャイロセンサ8で計測される角速度データS7を各々積分した結果得られる距離データおよび角度データを用いて、そのデータを時間軸で積分していくことにより、初期値(X,Y)から自車走行後の位置である現在位置(X´,Y´)を定期的に演算する。現在位置検出部11は、上記算出した現在位置を地図表示処理部16に出力すると共に、上記算出した現在位置を所定の算出回数毎にマップマッチ処理部13に出力する。また、現在位置検出部11は、後述するマップマッチ処理部13から現在位置の補正データを取得した場合、その現在位置の補正データを地図表示処理部16に出力する。さらに、現在位置検出部11は、経路誘導部15からの現在位置を要求された場合、経路誘導部15に現在位置(或いは現在位置の補正データ)を出力する。
【0035】
ここで、現在位置検出部11は、自車の回転した角度と進む方向との関係を一致させるため、地磁気センサ7から得られた方位データS6と、ジャイロ8から得られ角速度データS7を積分した角度データを参照して、自車が進行している方向の絶対方位を推定する。現在位置検出部11は、車輪速センサ6のデータS5およびジャイロ8のデータS7を各々積分していくと、誤差が蓄積するため、ある時間でGPS受信装置9から得られた位置データS8をもとに蓄積した誤差をキャンセルする処理を施し、現在位置のデータを求める。
【0036】
データ読出部12は、ディスプレイ2に表示が要求される領域や、経路探索のために要求される領域(現在位置および目的地を含む)にある地図データ31を記憶装置3から読み出す。
【0037】
マップマッチ処理部13は、データ読出部12が読みだした現在位置周辺の地図データと、現在位置検出部11が定期的に検出する現在位置を合わせ込むマップマッチ処理を行う。マップマッチ処理部13は、定期的に現在位置を補正し、補正した現在位置を示すデータを現在位置検出部11に出力する。
【0038】
経路探索部14は、ダイクストラ法等を用いて、2地点(例えば、現在位置および目的地)を結ぶ最適なコストで目的地に到達する経路をリンクデータ312(図2参照)を用いて探索する。経路探索部14は、探索の結果得られた経路を推奨経路として、ディスプレイ2に表示させるために地図表示処理部16に推奨経路を示すデータを出力する。また、経路探索部14は、探索された推奨経路を示すデータを経路誘導部15に出力する。
【0039】
さらに、本実施形態の経路探索部14は、ナビゲーション装置が起動された際に、記憶装置3に記憶されている地図データ310の中のメッシュサイズリスト310を、データ読出部12を介して取得する。そして、経路探索部14は、取得したメッシュサイズリスト310をRAM22(図4参照)の所定領域に格納する。経路探索部14は、経路探索を行う際、RAM22の所定領域に格納されているメッシュサイズリスト330を参照し、経路探索に利用するメッシュのリンクデータ312を、RAM22上に展開できるか否かを確認する。経路探索部14は、経路探索に利用するメッシュのリンクデータ312がRAM22上に展開できると確認されてからそのリンクデータ312を、データ読込部12を介して取得する。
【0040】
このように、本実施形態では、ナビゲーション装置が起動された場合、経路探索部14は、記憶装置3からメッシュサイズリスト330を読み出し、RAM22の所定領域に格納するようにしている。そして、経路探索部14は、リンクデータ312を取得する際、RAM22に格納されているメッシュサイズリスト330を参照することで、リンクデータ312をRAM22上に展開できるか否かを確認するようにしている。すなわち、本実施形態では、リンクデータ312を取得する際、リンクデータ312をRAM22上に展開できるか否かを記憶装置3にアクセスすることなく実現することができる。すなわち、本実施形態では、経路探索処理の際の行われるリンクデータ312の取得処理の時間を短縮することができる。
【0041】
また、本実施形態の経路探索部14は、設定部10が利用者からの目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索する処理を行う。そして、経路探索部14は、目的地が設定された場合、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの推奨経路の探索を実行する。このように、本実施形態では、目的地の設定を受け付ける前の段階で、車両の現在位置周辺の経路探索を行うようにしている。そのため、目的地が設定された場合に、目的地までの推奨経路を探索する探索時間を省略することができる。
【0042】
経路誘導部15は、探索された推奨経路を通って目的地に到達するように利用者を誘導する。具体的には、経路誘導部15は、自車位置検出部11から定期的に現在位置を取得する。そして、経路誘導部15は、取得した現在位置と、経路探索部14から取得した推奨経路を示すデータと、データ読出部12を介して記憶装置3から読込んだ地図データとを用いて利用者を目的地まで誘導する。なお、本実施形態では、経路誘導部15が行う目的地まで利用者を誘導する具体的方法について特に限定しない。例えば、経路誘導部15は、経路探索部14が探索した推奨経路を地図上に重ねた画面をディスプレイ2に表示しておいて、車両が推奨経路上を走行するために必要な情報(たとえば、次の交差点を曲がるべきか否かなどの情報)を、音声入出力装置4を介して利用者に知らせるようにする。
【0043】
地図表示処理部16は、ディスプレイ2に表示が要求される領域にある地図データ310を記憶装置3からデータ読出部12を介して受け取る。地図表示処理部16は、経路探索部14から探索した推奨経路を受け取り、現在位置検出部11から現在位置の情報を受け取る。そして、地図表示処理部16は、道路、その他の地図構成物、現在位置、目的地、および経路誘導のための矢印といったマーク等をディスプレイ2の画面に描画させるための地図描画コマンドを生成し、グラフィックス処理部17に出力する。
【0044】
グラフィックス処理部17は、地図表示処理部16で生成された地図描画コマンドを用いてディスプレイ2の画面上に画像データを表示させる。
【0045】
続いて、本実施形態の演算処理部1のハードウェア構成を説明する。
【0046】
図4は、演算処理部1のハードウェア構成を示す図である。
【0047】
図示するように、演算処理部1は、CPU(中央演算処理装置)21と、CPU21が実行するプログラムやデータを一時的に記憶するRAM(Random Access Memory)22と、上記各部(設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、およびグラフィックス処理部17)が有する機能を実行するためのプログラムが予め記憶されているROM(Read Only Memory)23と、メモリ間およびメモリと各デバイスとの間のデータを転送するDMA(Direct Memory Access)24と、グラフィック描画を実行し且つ表示制御を行う描画コントローラ25と、グラフィックスイメージデータを蓄えるVRAM(Video Random Access Memory)26と、イメージデータをRGB信号に変換するカラーパレット27と、アナログ信号をデジタル信号に変換するA/D変換器28と、シリアル信号をバスに同期したパラレル信号に変換するSCI(Serial Communication Interface)29と、パラレル信号をバスに同期させてバス上に載せるPIO(Parallel Input/Output)30と、パルス信号を積分するカウンタ31と、を有する。そして、上記各部(設定部10、現在位置検出部11、データ読出部12、マップマッチ処理部13、経路探索部14、経路誘導部15、地図表示処理部16、およびグラフィックス処理部17)の機能は、CPU21が、ROM23に記憶されている上記各部が有する機能を実行するためのプログラを、RAM22にロードし、実行することにより実現される。
【0048】
続いて、本実施形態のナビゲーション装置が行う推奨経路を探索する処理について説明する。最初にナビゲーション装置が起動された際に行う経路探索処理について説明する。
【0049】
図5は、本実施形態のナビゲーション装置が起動された際に行う経路探索処理のフローを説明するための図である。
【0050】
さて、演算処理部1の経路探索部14は、ナビゲーション装置が起動された場合に、以下の処理を開始する(S100)。
【0051】
最初に、経路探索部14は、記憶装置3に記憶されているメッシュサイズリスト330をデータ読出部12を介して取得し、RAM22の所定領域に格納する(S101)。このメッシュサイズリスト330は、経路探索部14が、経路探索に必要なメッシュのリンクデータ312をデータ読出部12を介して取得するたびに利用される。
【0052】
続いて、経路探索部14は、現在位置検出部11から車両の現在位置を取得して、現在位置周辺から所定距離の範囲に存在する交差点を求める。そして、経路探索部14は、現在位置から求めた交差点までの経路を探索する(S102)。
【0053】
具体的には、経路探索部14は、現在位置から所定の距離の範囲に含まれるメッシュを特定する。経路探索部14は、記憶装置3から特定したメッシュのリンクデータ312をデータ読出部12を介して取得する。なお、経路探索部14は、特定したメッシュのリンクデータ312を取得する場合、RAM22の所定領域に格納したメッシュサイズリスト330を参照する。経路探索部14は、メッシュサイズリスト330に対応付けられている特定したメッシュのリンクデータ312のデータサイズおよびRAM22の容量を確認し、RAM22に展開可能なリンクデータ312を順次取得していく。
【0054】
そして、経路探索部14は、取得したリンクデータ312を用いて現在位置から所定の距離範囲に存在する交差点を求める。経路探索部14は、取得したリンクデータ312を用いて、現在位置から上記の求めた交差点までの経路の探索を行う。なお、現在位置から所定の距離範囲に複数の交差点がある場合、経路探索部14は、複数ある交差点の各々について、現在位置から各交差点までの経路を探索する。そして、経路探索部14は、探索した現在位置から交差点までの経路を保持しておく。
【0055】
続いて、経路探索部14は、利用者からの目的地の入力を設定部10か介して受け付けた場合にS104に進む(S103)。
【0056】
S104では、経路探索部14は、入力した目的地に誤りがあるか否かについての確認を利用者から受け付けるための画面(確認画面)をディスプレイ2に表示する。さらに、経路探索部14は、利用者からの目的地に誤りがないことを示すデータ(目的地確定データ)を受け付ける前の段階で、S103で受け付けた目的地までの推奨経路の探索を開始する。
【0057】
具体的には、経路探索部14は、現在位置および受け付けた目的地を用いて経路探索に利用するためのメッシュを特定する。経路探索部14は、RAM22に格納されているメッシュサイズリスト330を参照して、メッシュサイズリスト330に対応付けられている特定したメッシュのリンクデータのデータサイズおよびRAM22に展開可能なデータサイズを確認する。経路探索部14は、確認の結果、RAM22に展開可能なリンクデータ312をデータ読出部12を介して順次取得する。経路探索部14は、取得したリンクデータ312を用いて、S102で求めた交差点から目的地までの経路を探索する。さらに、経路探索部14は、S102で求めた現在位置から交差点までの経路と、上記で求めた交差点から目的地までの経路とからなる経路を求める。
【0058】
続いて、経路探索部14は、利用者からの「目的地確定データ」を受け付けた場合にS106の処理に進む。ここで、経路探索部14は、S104において開始した経路の探索が終了していない場合には、その処理を継続して行うこととする。一方、経路探索部14は、利用者からの「目的地に誤りがある旨を示すデータ」を受け付けた場合、S104において開始した経路の探索処理を中止して、或いは、既に経路の探索処理が終了している場合には探索した経路をクリア(消去)して、S103の処理に戻る。
【0059】
S106では、経路探索部14は、S104において開始した経路の探索処理の結果得られた経路を推奨経路として特定して、特定した推奨経路をディスプレイ2に表示する。また、経路探索部14は、特定した推奨経路を経路誘導部15に出力して処理を終了する。
【0060】
なお、上記説明では、利用者がナビゲーション装置に目的地を示すデータを入力する場合を例にしているが特にこれに限定するものではない。例えば、設定部10に「住所」、「電話番号」等の検索条件を受け付け、受け付けた検索条件にしたがい目的地を検索する検索機能を設けておく。設定部10は、検索機能により目的地が検索された場合、検索された目的地を経路探索部14に出力する。そして、経路探索部14は、設定部10が検索した目的地の確認を利用者から受け付ける前の段階で、設定部10から受け付けた目的地までの経路探索を開始するようにしてもよい。
【0061】
続いて、本実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理について説明する。
【0062】
図6は、本実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理を説明するための図である。
【0063】
さて、ナビゲーション装置の経路探索部14は、車速センサ(図示しない)からの情報を定期的に取得して車両が停止しているか否かの検知を行う(S200)。経路探索部14は、車両が停止していることを検知した場合には、S102の処理に進む。一方、経路探索部14は、車両が停止していることを検知しない場合にはS200の処理を繰り返す。
【0064】
その後、経路探索部14は、図5で説明したS102〜S106と同じ処理を行う。
【0065】
このように、本実施形態では、ナビゲーション装置が起動された場合に、経路探索部14が、記憶装置3からメッシュサイズリスト330を読み出し、RAM22の所定領域に格納するようにしている。そのため、経路探索部14は、経路探索を行う際に、探索に必用なメッシュのリンクデータをRAM22上に展開できるか否を確認する処理を記憶装置3にアクセスすることなく実現することができる。そのため、本実施形態では、結果的に、経路探索処理の時間を短縮することができる。
【0066】
また、本実施形態の経路探索部14は、設定部10が利用者からの目的地の設定を受け付ける前の段階において、予め、車両の現在位置と、現在位置から所定範囲に含まれる交差点との2点間を結ぶ経路を探索しておくようにしている。そして、経路探索部14は、目的地が設定された場合、予め探索しておいた所定範囲に含まれる交差点までの経路を利用して、目的地までの経路探索を実行する。すなわち、本実施形態では、目的地の設定を受け付ける前の段階で、車両の現在位置周辺の経路探索を行うようにしている。そのため、目的地が設定された場合に、現在位置から交差点までの経路探索を省略できるため、結果的に目的地までの推奨経路を探索する探索時間を短縮することができる。
【0067】
さらに、本実施形態では、目的地の設定をナビゲーション装置が受け付ける際、入力した目的地に誤りがないかの確認を利用者から受け付ける前の段階で、目的地までの経路探索を開始するようにしている。そのため、利用者からの目的地の確認を受け付けた場合、既に、その目的地までの推奨経路の探索が開始されていることとなる。そのため、本実施形態によれば、目的地が最終的に設定されてからの探索時間を短縮することができる。
【0068】
このように、本実施形態によれば、ナビゲーション装置において、目的地を設定してから推奨経路を利用者に提示するまでの時間を短縮することたできる。
【0069】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、本実施形態では、目的地が設定された場合に、予め、目的地が設定される前に探索しておいた現在位置から交差点までの経路を利用して経路探索するようにしているが、特にこれの限定されるものではない。例えば、経路探索部14は、目的地までの推奨経路を探索する際に採用されなかった候補経路を、最終的に採用された推奨経路の誘導が開始された後にも保持しておくようにする。そして、経路探索部14は、車両の逸脱が検出した場合に、保持している経路候補を利用して目的地までの経路を再探索する処理を行うようにしてもよい。このように一度探索しておいた経路候補を再利用することにより、オートリルートを行う際の探索時間を短縮させることができる。
【0070】
また、本実施形態では、目的地が設定される前の段階で、現在位置から所定範囲の交差点までの経路を探索するようにしているが特にこれに限定しない。例えば、現在位置から主要道路までの経路を探索するようにしてもよい。
【図面の簡単な説明】
【0071】
【図1】本発明の実施形態が適用された車載用ナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の記憶装置に記憶されている地図データのデータ構造を模擬的に示す図である。
【図3】本発明の実施形態の演算処理部の機能構成を説明するための図である。
【図4】本発明の実施形態の演算処理部のハードウェア構成を示す図である。4
【図5】本発明の実施形態のナビゲーション装置が起動された際に行う経路探索処理のフローを説明するための図である。
【図6】本発明の実施形態のナビゲーション装置が車両の停止していることを検知した場合に行う経路探索処理を説明するための図である。
【符号の説明】
【0072】
1…演算処理部、2…ディスプレイ、3…記憶装置、4…音声入出力装置、5…入力装置、6…車輪速センサ、7…地磁気センサ、8…ジャイロ、9…GPS受信装置、10…設定部、11…現在位置検出部、12…データ読出部、13…マップマッチ処理部、14…経路探索部、15…経路誘導部、16…地図表示処理部、17…グラフィックス処理部、21…CPU、22…RAM、23…ROM、24…DMA、25…描画コントローラ、26…VRAM、27…カラーパレット、28…A/D変換器、29…SCI、30…PIO、31…カウンタ
【特許請求の範囲】
【請求項1】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置における経路探索方法であって、
前記ナビゲーション装置は、
前記車両の停止を検知するステップと、
前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出するステップと、
前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索するステップと、
目的地の設定を受付けるステップと、
前記目的地の設定を受け付けた場合に、前記交差点から前記目的地までの経路を前記リンク情報を利用して探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定するステップと、を実行すること
を特徴とするナビゲーション装置における経路探索方法。
【請求項2】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置における経路探索方法であって、
前記ナビゲーション装置には、表示装置が接続されていて、
前記ナビゲーション装置は、
前記車両の現在位置を検出するステップと、
利用者からの目的地の入力を受け付けるステップと
前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための画面を前記表示装置に表示するステップと、
利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するステップと、
前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索するステップと、
前記目的地が設定された場合に、前記探索された経路を推奨経路として特定するステップと、を実行すること
を特徴とするナビゲーション装置における経路探索方法。
【請求項3】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置であって、
前記車両の停止を検知する手段と、
前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出する手段と、
前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索する手段と、
目的地の設定を受付ける手段と、
前記目的地の設定を受け付けた場合に前記リンク情報を利用して、前記交差点から前記目的地までの経路を探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定する手段と、を有すること
を特徴とするナビゲーション装置。
【請求項4】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置であって、
前記車両の現在位置を検出する手段と、
利用者からの目的地の入力を受け付ける手段と
前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための情報を表示する手段と、
利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定する手段と、
前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索する手段と、
前記目的地が設定された場合に、前記探索された経路を推奨経路として特定する手段と、を有すること
を特徴とするナビゲーション装置。
【請求項1】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置における経路探索方法であって、
前記ナビゲーション装置は、
前記車両の停止を検知するステップと、
前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出するステップと、
前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索するステップと、
目的地の設定を受付けるステップと、
前記目的地の設定を受け付けた場合に、前記交差点から前記目的地までの経路を前記リンク情報を利用して探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定するステップと、を実行すること
を特徴とするナビゲーション装置における経路探索方法。
【請求項2】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置における経路探索方法であって、
前記ナビゲーション装置には、表示装置が接続されていて、
前記ナビゲーション装置は、
前記車両の現在位置を検出するステップと、
利用者からの目的地の入力を受け付けるステップと
前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための画面を前記表示装置に表示するステップと、
利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定するステップと、
前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索するステップと、
前記目的地が設定された場合に、前記探索された経路を推奨経路として特定するステップと、を実行すること
を特徴とするナビゲーション装置における経路探索方法。
【請求項3】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置であって、
前記車両の停止を検知する手段と、
前記車両の停止を検知した場合あるいは自身が起動された場合、該車両の現在位置を検出する手段と、
前記検出した現在位置から所定距離の範囲内にある交差点までの経路を前記リンク情報を用いて探索する手段と、
目的地の設定を受付ける手段と、
前記目的地の設定を受け付けた場合に前記リンク情報を利用して、前記交差点から前記目的地までの経路を探索し、前記探索した現在位置から前記交差点までの経路と、前記探索した交差点から前記目的地までの経路とからなる経路を推奨経路として特定する手段と、を有すること
を特徴とするナビゲーション装置。
【請求項4】
車両に搭載され、リンク情報を用いて目的地までの推奨経路を探索するナビゲーション装置であって、
前記車両の現在位置を検出する手段と、
利用者からの目的地の入力を受け付ける手段と
前記受け付けた目的地に誤りがないかの確認を利用者から受け付けるための情報を表示する手段と、
利用者からの目的地に誤りがない旨を示すデータを受け付けた場合に目的地を設定する手段と、
前記目的地の入力を受け付けた場合、前記目的地が設定される前に、前記リンク情報を用いて前記検出した現在地位から前記受け付けた目的地までの経路を探索する手段と、
前記目的地が設定された場合に、前記探索された経路を推奨経路として特定する手段と、を有すること
を特徴とするナビゲーション装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−3215(P2006−3215A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−179852(P2004−179852)
【出願日】平成16年6月17日(2004.6.17)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月17日(2004.6.17)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]