
ナビゲーション装置及びナビゲーション方法
【課題】未登録道路を最初に走行する際にもカーマークをスムーズに表示するナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】車両用道路を含む道路地図データを記憶する道路地図データベース8と、車両の現在位置を検出する現在位置計算部1と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に表示する表示部6と、車両の現在位置と車両用道路が一致しない時、カーマークを車両用道路上へ補正する車両位置補正部2と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部4と、未登録道路推測部4が未登録道路への車両の進入を推測した時、カーマークを車両用道路上へ補正しないように車両位置補正部2を制御する制御部5とを有する。
【解決手段】車両用道路を含む道路地図データを記憶する道路地図データベース8と、車両の現在位置を検出する現在位置計算部1と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に表示する表示部6と、車両の現在位置と車両用道路が一致しない時、カーマークを車両用道路上へ補正する車両位置補正部2と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部4と、未登録道路推測部4が未登録道路への車両の進入を推測した時、カーマークを車両用道路上へ補正しないように車両位置補正部2を制御する制御部5とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に、道路地図データベースに登録されている道路上に自車位置を示すカーマークを補正するナビゲーション装置及び方法に関する。
【背景技術】
【0002】
従来より、道路地図データベースに登録されていない未登録道路を車両が走行したときに、自動的にその始点から終点までの走行軌跡を記憶して未登録道路を自動的に登録する車両用ナビゲーション装置が知られている(例えば、特許文献1参照)。特許文献1記載の車両用ナビゲーション装置は、自動的に登録した未登録道路を、再びその地域を走行するときに走行軌跡に基づいて道路地図上に付加表示する。
【特許文献1】特開平06−088732号公報(特に段落[0002]、[0004]参照)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1に開示された技術において、未登録道路を最初に走行する際には、当然、道路地図データベースに登録されていないため、車両用ナビゲーション装置は、表示画面上での車両の現在位置を示すカーマークを最寄の車両用道路上へ補正してしまう。このとき、実際に走行している車両用道路が道路地図データベース上に存在しないため、カーマークが細かくずれてしまうという問題があった。
【課題を解決するための手段】
【0004】
本発明の特徴は、車両用道路を含む道路地図データを記憶する道路地図データベースと、車両の現在位置を検出する現在位置計算部と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に表示する表示部と、車両の現在位置と車両用道路が一致しない時、カーマークを車両用道路上へ補正する車両位置補正部と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部と、未登録道路推測部が未登録道路への車両の進入を推測した時、カーマークを車両用道路上へ補正しないように車両位置補正部を制御する制御部とを有するナビゲーション装置であることを要旨とする。
【発明の効果】
【0005】
本発明によれば、未登録道路を最初に走行する際にもカーマークをスムーズに表示するナビゲーション装置及びナビゲーション方法を提供することが出来る。
【発明を実施するための最良の形態】
【0006】
以下図面を参照して、本発明の実施の形態を説明する。図面の記載において同一あるいは類似の部分には同一あるいは類似な符号を付している。
【0007】
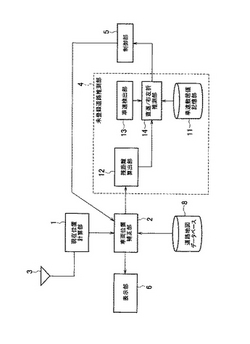
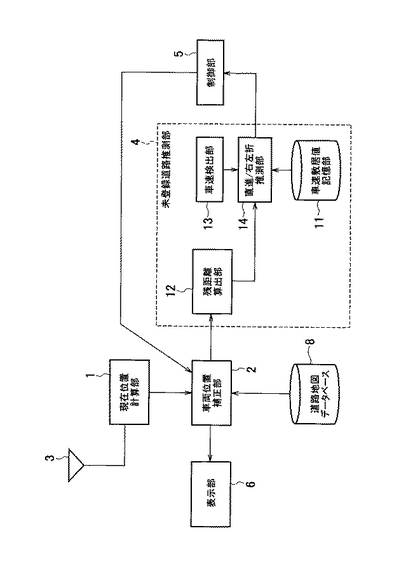
図1に示すように、本発明の実施の形態に係わるナビゲーション装置は、車両用道路を含む道路地図データを記憶する道路地図データベース8と、車両の現在位置を検出する現在位置計算部1と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に車両の乗員に対して表示する表示部6と、車両の現在位置が道路地図データ上の車両用道路の何れにも一致しない時、カーマークを車両用道路上へ補正する車両位置補正部2と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部4と、未登録道路推測部4が未登録道路への車両の進入を推測した時、カーマークを道路地図データに既に登録されている車両用道路(登録済道路)上へ補正しないように車両位置補正部2を制御する制御部5と、現在位置計算部1に接続されたアンテナ3とを有する。ここで「未登録道路」とは、道路地図データベース8上に道路地図データとしての登録されていない道路を示し、「登録済道路」とは、道路地図データベース8上に道路地図データとしての登録されている道路を示す。道路地図データは、道路区間毎の道路情報を含んでいる。
【0008】
現在位置計算部1は、汎地球測位システム(global positioning system:GPS)、車速パルス、ジャイロなどを用いて車両の自車位置を算出する。GPSを用いる場合、GPSの精度限界を補うために車両位置補正部2を用いてマップマッチング処理を行う。「マップマッチング処理」とは、車両の現在位置が道路地図データ上の車両用道路、即ち登録済道路の何れにも一致しない時、表示部6の表示画面上に表示されるカーマークを最寄の登録済道路上へ移動/補正する処理である。マップマッチング処理を行うことにより、車両の乗員は自車が現在走行している道路を容易に特定することができる。
【0009】
前述したように、車両が未登録道路を初めて走行する際、車両位置補正部2がマップマッチング処理を行うことにより、カーマークの位置が大きく補正されてしまい、自車の現在位置を正確に表示することができない。そこで、未登録道路推測部4が、未登録道路へ車両が進入することを車両の走行状態に基づいて予め推測し、制御部5が、カーマークを登録済道路上へ補正しないように車両位置補正部2を制御する。即ち、制御部5は、未登録道路推測部4の推測結果に基づいて、車両位置補正部2のマップマッチング処理を解除するか継続するかを判断する。車両位置補正部2のマップマッチング処理を解除する場合、ナビゲーション装置は、GPS、車速パルス、ジャイロ等からのセンサー情報のみで車両の現在位置を特定する。
【0010】
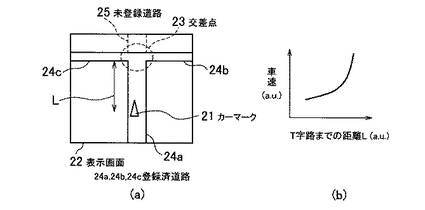
次に、図2(a)に示すように、3方向に伸びる登録済道路24a、24b、24cが1つの交差点23において交わる、いわゆる「T字路」が、道路地図データベース8上に道路地図データとしての登録されている。しかし、実際には交差点23から残りの1方向に伸びる未登録道路25が加わった、いわゆる「十字路」が存在する。この状況における図1のナビゲーション装置の処理構造について説明する。
【0011】
図1の未登録道路推測部4は、図2(a)のT字路(実際には十字路)の交差点23において車両が直進するか右左折するかを推測して、T字路の交差点23において未登録道路25への車両の進入を推測する。
【0012】
未登録道路推測部4は、車両と交差点23間の距離Lごとに定めた車両の走行速度の敷居値を記憶する車速敷居値記憶部11と、車両の現在位置と交差点23の距離Lを算出する残距離算出部12と、車両の走行速度を検出する車速検出部13と、車両の走行速度が敷居値を上回っている時、交差点23において車両は直進すると推測し、車両の走行速度が敷居値以下である時、交差点23において車両は右左折すると推測する直進/右左折推測部14とを備える。
【0013】
図2(b)に示すように、車速敷居値記憶部11に記憶されている車両の走行速度の敷居値は、車両の現在位置と交差点23間の距離Lに依存する。車両の在位置と交差点23間の距離Lが短くなるほど敷居値は小さくなる。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値よりも速い時、直進/右左折推測部14は車両の直進を推測する。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値と同じ或いは遅い時、直進/右左折推測部14は車両の右左折を推測する。このように、未登録道路推測部4は、車両の走行速度の敷居値を基準として、直進するか右左折するかを推測する。
【0014】
例えば、図2(a)に示すように、未登録道路25に対向する登録済道路24aから交差点23に向かって車両が走行している場合、表示部6の表示画面22上には、登録済道路24aから交差点23に向かって走行する車両を示すカーマーク21がT字路と共に表示される。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値よりも速い時、直進/右左折推測部14は車両の直進を推測する。車両が交差点23を直進した後に走行できる道路が道路地図データベース8に登録されていないため、未登録道路推測部4は、T字路の交差点23において未登録道路25への車両の進入を推測することができる。
【0015】
次に、図3を参照して、図1のナビゲーション装置を用いたナビゲーション方法を説明する。ここでは、図2(a)のT字路における処理手順を例にとり説明する。
【0016】
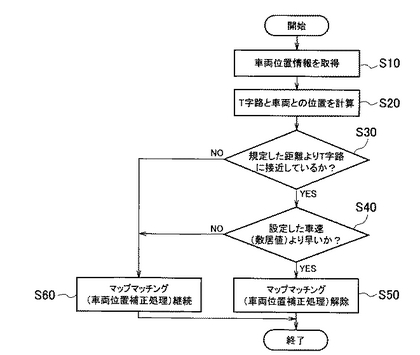
(イ)先ずS10段階において、現在位置計算部1は、車両の現在位置に関する情報を取得する。取得した位置情報は道路地図データと対応させて表示部6に表示される。S20段階において、残距離算出部12は、車両の現在位置と交差点23間の距離Lを算出する。
【0017】
(ロ)S30段階において、未登録道路推測部4は、車両の現在位置と交差点23間の距離Lが予め定めた距離よりも短いか否か、即ち、予め定めた距離よりも車両がT字路と判断できる道路へ接近しているか否かを判断する。予め定めた距離よりも車両がT字路へ接近している場合(S30段階においてYES)S40段階に進み、予め定めた距離よりも車両がT字路へ接近していない場合(S30段階においてNO)S60段階に進む。なお、図2(a)は車両がT字路に差し掛かったときに走行速度を監視し始める状態、つまりS30段階においてYESの状態を示している。
【0018】
(ハ)S40段階において、直進/右左折推測部14は、車速検出部13が検出した車両の走行速度が車速敷居値記憶部11に記憶されている車両の走行速度の敷居値を上回っているか否かを判断する。車両の走行速度が敷居値を上回っている場合(S40段階においてYES)S50段階に進み、車両の走行速度が敷居値を上回っていない場合(S40段階においてNO)S60段階に進む。
【0019】
(ニ)S50段階において、未登録道路推測部4は交差点23において車両は直進すると推測し、制御部5はカーマーク21を車両用道路上へ補正しないように車両位置補正部2を制御する。即ち、制御部5はマップマッチング処理を解除する。一方、S60段階において、未登録道路推測部4は交差点23において車両は右左折すると推測し、制御部5は継続してカーマーク21を車両用道路上へ補正しするように車両位置補正部2を制御する。即ち、制御部5はマップマッチング処理を継続させる。このようにして、未登録道路推測部4は未登録道路へ車両が進入することを車両の走行状態に基づいて推測することができる。
【0020】
以上説明したように、未登録道路推測部4が未登録道路への車両の進入を推測した時、制御部5がカーマーク21を登録済道路上へ補正しないように車両位置補正部2を制御することにより、未登録道路を最初に走行する際にもカーマーク21をスムーズに表示することができる。
【0021】
また、車両が道路地図データ上のT字路に差し掛かったときに車両が直進/右左折して未登録道路に進入することを予測して、マップマッチング処理を事前に解除することができるので、カーマーク21はマップマッチング処理で位置がずれることなくスムーズに道路地図データ上の車両用道路がないエリアに進入することができる。
【0022】
T字路の交差点23において車両が直進するか右左折するかを推測することにより、道路地図データ上ではT字路として登録された交差点における未登録道路を推測することができる。
【0023】
車両と交差点の距離Lごとに定めた車両の走行速度の敷居値を基準として、直進するか右左折するかを推測することにより、推測の精度が向上する。
【0024】
なお、特許請求の範囲に記載した「発明特定事項」と発明の詳細な説明及び図面に記載された事項との対応関係は以下のとおりである。「道路地図データベース」は図1の道路地図データベース8に対応し、「現在位置計算部」は図1の現在位置計算部1に対応し、「表示部」は図1の表示部6に対応し、「車両位置補正部」は図1の車両位置補正部2に対応し、「未登録道路推測部」は図1の未登録道路推測部4に対応し、「制御部」は図1の制御部5に対応する。また、「車速敷居値記憶部」は図1の車速敷居値記憶部11に対応し、「残距離算出部」は図1の残距離算出部12に対応し、「車速検出部」は図1の車速検出部13に対応し、「直進/右左折推測部」は図1の直進/右左折推測部14に対応する。
【0025】
上記のように、本発明は、1つの実施の形態によって記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
【0026】
本発明の実施の形態では、図1の未登録道路推測部4が、図2(b)に示す現在位置から交差点23までの距離Lごとの車両の走行速度の敷居値を基準として、T字路を車両が直進するか右左折するかを推測する例を説明した。しかし、本発明はこれに限定されるものではない。例えば、車両がT字路のノード(交差点23)を通過する時の走行速度を所定の敷居値と比較して、T字路を車両が直進するか右左折するかを推測しても構わない。また、車両が未登録道路25に進入することを推測してマップマッチング処理を解除しても、その後、現在位置計算部1がジャイロ旋回を検出した時は、マップマッチング処理を再開するようにしても構わない。
【0027】
このように、本発明はここでは記載していない様々な実施の形態等を包含するということを理解すべきである。したがって、本発明はこの開示から妥当な特許請求の範囲に係る発明特定事項によってのみ限定されるものである。
【図面の簡単な説明】
【0028】
【図1】本発明の実施の形態に係わるナビゲーション装置を示すブロック図である。
【図2】図2(a)は3つの車両用道路が1つの交差点において交わるT字路を示す地図であり、図2(b)は車両の現在位置から図2(a)の交差点までの距離と車両の走行速度の敷居値との関係を示すグラフである。
【図3】図1のナビゲーション装置を用いたナビゲーション方法を示すフローチャートである。
【符号の説明】
【0029】
1…現在位置計算部
2…車両位置補正部
3…アンテナ
4…未登録道路推測部
5…制御部
6…表示部
8…道路地図データベース
11…車速敷居値記憶部
12…残距離算出部
13…車速検出部
14…直進/右左折推測部
21…カーマーク
22…表示画面
23…交差点
24a〜24c…登録済道路
25…未登録道路
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に、道路地図データベースに登録されている道路上に自車位置を示すカーマークを補正するナビゲーション装置及び方法に関する。
【背景技術】
【0002】
従来より、道路地図データベースに登録されていない未登録道路を車両が走行したときに、自動的にその始点から終点までの走行軌跡を記憶して未登録道路を自動的に登録する車両用ナビゲーション装置が知られている(例えば、特許文献1参照)。特許文献1記載の車両用ナビゲーション装置は、自動的に登録した未登録道路を、再びその地域を走行するときに走行軌跡に基づいて道路地図上に付加表示する。
【特許文献1】特開平06−088732号公報(特に段落[0002]、[0004]参照)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1に開示された技術において、未登録道路を最初に走行する際には、当然、道路地図データベースに登録されていないため、車両用ナビゲーション装置は、表示画面上での車両の現在位置を示すカーマークを最寄の車両用道路上へ補正してしまう。このとき、実際に走行している車両用道路が道路地図データベース上に存在しないため、カーマークが細かくずれてしまうという問題があった。
【課題を解決するための手段】
【0004】
本発明の特徴は、車両用道路を含む道路地図データを記憶する道路地図データベースと、車両の現在位置を検出する現在位置計算部と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に表示する表示部と、車両の現在位置と車両用道路が一致しない時、カーマークを車両用道路上へ補正する車両位置補正部と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部と、未登録道路推測部が未登録道路への車両の進入を推測した時、カーマークを車両用道路上へ補正しないように車両位置補正部を制御する制御部とを有するナビゲーション装置であることを要旨とする。
【発明の効果】
【0005】
本発明によれば、未登録道路を最初に走行する際にもカーマークをスムーズに表示するナビゲーション装置及びナビゲーション方法を提供することが出来る。
【発明を実施するための最良の形態】
【0006】
以下図面を参照して、本発明の実施の形態を説明する。図面の記載において同一あるいは類似の部分には同一あるいは類似な符号を付している。
【0007】
図1に示すように、本発明の実施の形態に係わるナビゲーション装置は、車両用道路を含む道路地図データを記憶する道路地図データベース8と、車両の現在位置を検出する現在位置計算部1と、車両の現在位置を示すカーマーク及び車両の現在位置の周辺の車両用道路を同時に車両の乗員に対して表示する表示部6と、車両の現在位置が道路地図データ上の車両用道路の何れにも一致しない時、カーマークを車両用道路上へ補正する車両位置補正部2と、道路地図データに含まれていない車両用道路(未登録道路)へ車両が進入することを車両の走行状態に基づいて推測する未登録道路推測部4と、未登録道路推測部4が未登録道路への車両の進入を推測した時、カーマークを道路地図データに既に登録されている車両用道路(登録済道路)上へ補正しないように車両位置補正部2を制御する制御部5と、現在位置計算部1に接続されたアンテナ3とを有する。ここで「未登録道路」とは、道路地図データベース8上に道路地図データとしての登録されていない道路を示し、「登録済道路」とは、道路地図データベース8上に道路地図データとしての登録されている道路を示す。道路地図データは、道路区間毎の道路情報を含んでいる。
【0008】
現在位置計算部1は、汎地球測位システム(global positioning system:GPS)、車速パルス、ジャイロなどを用いて車両の自車位置を算出する。GPSを用いる場合、GPSの精度限界を補うために車両位置補正部2を用いてマップマッチング処理を行う。「マップマッチング処理」とは、車両の現在位置が道路地図データ上の車両用道路、即ち登録済道路の何れにも一致しない時、表示部6の表示画面上に表示されるカーマークを最寄の登録済道路上へ移動/補正する処理である。マップマッチング処理を行うことにより、車両の乗員は自車が現在走行している道路を容易に特定することができる。
【0009】
前述したように、車両が未登録道路を初めて走行する際、車両位置補正部2がマップマッチング処理を行うことにより、カーマークの位置が大きく補正されてしまい、自車の現在位置を正確に表示することができない。そこで、未登録道路推測部4が、未登録道路へ車両が進入することを車両の走行状態に基づいて予め推測し、制御部5が、カーマークを登録済道路上へ補正しないように車両位置補正部2を制御する。即ち、制御部5は、未登録道路推測部4の推測結果に基づいて、車両位置補正部2のマップマッチング処理を解除するか継続するかを判断する。車両位置補正部2のマップマッチング処理を解除する場合、ナビゲーション装置は、GPS、車速パルス、ジャイロ等からのセンサー情報のみで車両の現在位置を特定する。
【0010】
次に、図2(a)に示すように、3方向に伸びる登録済道路24a、24b、24cが1つの交差点23において交わる、いわゆる「T字路」が、道路地図データベース8上に道路地図データとしての登録されている。しかし、実際には交差点23から残りの1方向に伸びる未登録道路25が加わった、いわゆる「十字路」が存在する。この状況における図1のナビゲーション装置の処理構造について説明する。
【0011】
図1の未登録道路推測部4は、図2(a)のT字路(実際には十字路)の交差点23において車両が直進するか右左折するかを推測して、T字路の交差点23において未登録道路25への車両の進入を推測する。
【0012】
未登録道路推測部4は、車両と交差点23間の距離Lごとに定めた車両の走行速度の敷居値を記憶する車速敷居値記憶部11と、車両の現在位置と交差点23の距離Lを算出する残距離算出部12と、車両の走行速度を検出する車速検出部13と、車両の走行速度が敷居値を上回っている時、交差点23において車両は直進すると推測し、車両の走行速度が敷居値以下である時、交差点23において車両は右左折すると推測する直進/右左折推測部14とを備える。
【0013】
図2(b)に示すように、車速敷居値記憶部11に記憶されている車両の走行速度の敷居値は、車両の現在位置と交差点23間の距離Lに依存する。車両の在位置と交差点23間の距離Lが短くなるほど敷居値は小さくなる。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値よりも速い時、直進/右左折推測部14は車両の直進を推測する。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値と同じ或いは遅い時、直進/右左折推測部14は車両の右左折を推測する。このように、未登録道路推測部4は、車両の走行速度の敷居値を基準として、直進するか右左折するかを推測する。
【0014】
例えば、図2(a)に示すように、未登録道路25に対向する登録済道路24aから交差点23に向かって車両が走行している場合、表示部6の表示画面22上には、登録済道路24aから交差点23に向かって走行する車両を示すカーマーク21がT字路と共に表示される。車速検出部13が検出した走行速度が残距離算出部12が算出した距離Lにおける敷居値よりも速い時、直進/右左折推測部14は車両の直進を推測する。車両が交差点23を直進した後に走行できる道路が道路地図データベース8に登録されていないため、未登録道路推測部4は、T字路の交差点23において未登録道路25への車両の進入を推測することができる。
【0015】
次に、図3を参照して、図1のナビゲーション装置を用いたナビゲーション方法を説明する。ここでは、図2(a)のT字路における処理手順を例にとり説明する。
【0016】
(イ)先ずS10段階において、現在位置計算部1は、車両の現在位置に関する情報を取得する。取得した位置情報は道路地図データと対応させて表示部6に表示される。S20段階において、残距離算出部12は、車両の現在位置と交差点23間の距離Lを算出する。
【0017】
(ロ)S30段階において、未登録道路推測部4は、車両の現在位置と交差点23間の距離Lが予め定めた距離よりも短いか否か、即ち、予め定めた距離よりも車両がT字路と判断できる道路へ接近しているか否かを判断する。予め定めた距離よりも車両がT字路へ接近している場合(S30段階においてYES)S40段階に進み、予め定めた距離よりも車両がT字路へ接近していない場合(S30段階においてNO)S60段階に進む。なお、図2(a)は車両がT字路に差し掛かったときに走行速度を監視し始める状態、つまりS30段階においてYESの状態を示している。
【0018】
(ハ)S40段階において、直進/右左折推測部14は、車速検出部13が検出した車両の走行速度が車速敷居値記憶部11に記憶されている車両の走行速度の敷居値を上回っているか否かを判断する。車両の走行速度が敷居値を上回っている場合(S40段階においてYES)S50段階に進み、車両の走行速度が敷居値を上回っていない場合(S40段階においてNO)S60段階に進む。
【0019】
(ニ)S50段階において、未登録道路推測部4は交差点23において車両は直進すると推測し、制御部5はカーマーク21を車両用道路上へ補正しないように車両位置補正部2を制御する。即ち、制御部5はマップマッチング処理を解除する。一方、S60段階において、未登録道路推測部4は交差点23において車両は右左折すると推測し、制御部5は継続してカーマーク21を車両用道路上へ補正しするように車両位置補正部2を制御する。即ち、制御部5はマップマッチング処理を継続させる。このようにして、未登録道路推測部4は未登録道路へ車両が進入することを車両の走行状態に基づいて推測することができる。
【0020】
以上説明したように、未登録道路推測部4が未登録道路への車両の進入を推測した時、制御部5がカーマーク21を登録済道路上へ補正しないように車両位置補正部2を制御することにより、未登録道路を最初に走行する際にもカーマーク21をスムーズに表示することができる。
【0021】
また、車両が道路地図データ上のT字路に差し掛かったときに車両が直進/右左折して未登録道路に進入することを予測して、マップマッチング処理を事前に解除することができるので、カーマーク21はマップマッチング処理で位置がずれることなくスムーズに道路地図データ上の車両用道路がないエリアに進入することができる。
【0022】
T字路の交差点23において車両が直進するか右左折するかを推測することにより、道路地図データ上ではT字路として登録された交差点における未登録道路を推測することができる。
【0023】
車両と交差点の距離Lごとに定めた車両の走行速度の敷居値を基準として、直進するか右左折するかを推測することにより、推測の精度が向上する。
【0024】
なお、特許請求の範囲に記載した「発明特定事項」と発明の詳細な説明及び図面に記載された事項との対応関係は以下のとおりである。「道路地図データベース」は図1の道路地図データベース8に対応し、「現在位置計算部」は図1の現在位置計算部1に対応し、「表示部」は図1の表示部6に対応し、「車両位置補正部」は図1の車両位置補正部2に対応し、「未登録道路推測部」は図1の未登録道路推測部4に対応し、「制御部」は図1の制御部5に対応する。また、「車速敷居値記憶部」は図1の車速敷居値記憶部11に対応し、「残距離算出部」は図1の残距離算出部12に対応し、「車速検出部」は図1の車速検出部13に対応し、「直進/右左折推測部」は図1の直進/右左折推測部14に対応する。
【0025】
上記のように、本発明は、1つの実施の形態によって記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
【0026】
本発明の実施の形態では、図1の未登録道路推測部4が、図2(b)に示す現在位置から交差点23までの距離Lごとの車両の走行速度の敷居値を基準として、T字路を車両が直進するか右左折するかを推測する例を説明した。しかし、本発明はこれに限定されるものではない。例えば、車両がT字路のノード(交差点23)を通過する時の走行速度を所定の敷居値と比較して、T字路を車両が直進するか右左折するかを推測しても構わない。また、車両が未登録道路25に進入することを推測してマップマッチング処理を解除しても、その後、現在位置計算部1がジャイロ旋回を検出した時は、マップマッチング処理を再開するようにしても構わない。
【0027】
このように、本発明はここでは記載していない様々な実施の形態等を包含するということを理解すべきである。したがって、本発明はこの開示から妥当な特許請求の範囲に係る発明特定事項によってのみ限定されるものである。
【図面の簡単な説明】
【0028】
【図1】本発明の実施の形態に係わるナビゲーション装置を示すブロック図である。
【図2】図2(a)は3つの車両用道路が1つの交差点において交わるT字路を示す地図であり、図2(b)は車両の現在位置から図2(a)の交差点までの距離と車両の走行速度の敷居値との関係を示すグラフである。
【図3】図1のナビゲーション装置を用いたナビゲーション方法を示すフローチャートである。
【符号の説明】
【0029】
1…現在位置計算部
2…車両位置補正部
3…アンテナ
4…未登録道路推測部
5…制御部
6…表示部
8…道路地図データベース
11…車速敷居値記憶部
12…残距離算出部
13…車速検出部
14…直進/右左折推測部
21…カーマーク
22…表示画面
23…交差点
24a〜24c…登録済道路
25…未登録道路
【特許請求の範囲】
【請求項1】
車両用道路を含む道路地図データを記憶する道路地図データベースと、
前記車両の現在位置を検出する現在位置計算部と、
前記現在位置を示すカーマーク及び前記現在位置の周辺の前記車両用道路を同時に表示する表示部と、
前記現在位置と前記車両用道路が一致しない時、前記カーマークを前記車両用道路上へ補正する車両位置補正部と、
前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測する未登録道路推測部と、
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路への前記車両の進入を推測した時、前記カーマークを前記車両用道路上へ補正しないように前記車両位置補正部を制御する制御部
とを有することを特徴とするナビゲーション装置。
【請求項2】
前記未登録道路推測部は、3つの前記車両用道路が1つの交差点において交わるT字路において、前記道路地図データに含まれていない車両用道路への前記車両の進入を推測することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記未登録道路推測部は、前記T字路の交差点において前記車両が直進するか右左折するかを推測することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記未登録道路推測部は、前記車両と前記交差点の距離ごとに定めた前記車両の走行速度の敷居値を基準として、直進するか右左折するかを推測することを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
前記未登録道路推測部は、
前記敷居値を記憶する車速敷居値記憶部と、
前記現在位置と前記交差点の距離を算出する残距離算出部と、
前記走行速度を検出する車速検出部と、
前記走行速度が前記敷居値を上回っている時、前記交差点において前記車両は直進すると推測し、前記走行速度が前記敷居値以下である時、前記交差点において前記車両は右左折すると推測する直進/右左折推測部
とを備えることを特徴とする請求項4記載のナビゲーション装置。
【請求項6】
直進/右左折推測部が前記車両の直進或いは右左折を推測した結果、前記T字路において前記道路地図データに含まれていない車両用道路への前記車両の進入が推測されることを特徴とする請求項5記載のナビゲーション装置。
【請求項7】
車両用道路を含む道路地図データを記憶する手段と、現在位置計算部と、車両の現在位置を示すカーマーク及び前記現在位置の周辺の前記車両用道路を同時に表示する表示部と、前記現在位置と前記車両用道路が一致しない時、前記カーマークを前記車両用道路上へ補正する車両位置補正部と、未登録道路推測部と、制御部とを有するナビゲーション装置を用いたナビゲーション方法であって、
前記現在位置計算部が前記現在位置を検出し、
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測し、
前記制御部が前記カーマークを前記車両用道路上へ補正しないように前記車両位置補正部を制御する
ことを特徴とするナビゲーション方法。
【請求項8】
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測することは、
3つの前記車両用道路が1つの交差点において交わるT字路の交差点と前記現在位置の距離を算出し、
前記車両の走行速度を検出し、
前記走行速度が前記敷居値を上回っている時、前記交差点において前記車両は直進すると推測し、前記走行速度が前記敷居値以下である時、前記交差点において前記車両は右左折すると推測する
ことを備えることを特徴とする請求項7記載のナビゲーション方法。
【請求項1】
車両用道路を含む道路地図データを記憶する道路地図データベースと、
前記車両の現在位置を検出する現在位置計算部と、
前記現在位置を示すカーマーク及び前記現在位置の周辺の前記車両用道路を同時に表示する表示部と、
前記現在位置と前記車両用道路が一致しない時、前記カーマークを前記車両用道路上へ補正する車両位置補正部と、
前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測する未登録道路推測部と、
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路への前記車両の進入を推測した時、前記カーマークを前記車両用道路上へ補正しないように前記車両位置補正部を制御する制御部
とを有することを特徴とするナビゲーション装置。
【請求項2】
前記未登録道路推測部は、3つの前記車両用道路が1つの交差点において交わるT字路において、前記道路地図データに含まれていない車両用道路への前記車両の進入を推測することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記未登録道路推測部は、前記T字路の交差点において前記車両が直進するか右左折するかを推測することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記未登録道路推測部は、前記車両と前記交差点の距離ごとに定めた前記車両の走行速度の敷居値を基準として、直進するか右左折するかを推測することを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
前記未登録道路推測部は、
前記敷居値を記憶する車速敷居値記憶部と、
前記現在位置と前記交差点の距離を算出する残距離算出部と、
前記走行速度を検出する車速検出部と、
前記走行速度が前記敷居値を上回っている時、前記交差点において前記車両は直進すると推測し、前記走行速度が前記敷居値以下である時、前記交差点において前記車両は右左折すると推測する直進/右左折推測部
とを備えることを特徴とする請求項4記載のナビゲーション装置。
【請求項6】
直進/右左折推測部が前記車両の直進或いは右左折を推測した結果、前記T字路において前記道路地図データに含まれていない車両用道路への前記車両の進入が推測されることを特徴とする請求項5記載のナビゲーション装置。
【請求項7】
車両用道路を含む道路地図データを記憶する手段と、現在位置計算部と、車両の現在位置を示すカーマーク及び前記現在位置の周辺の前記車両用道路を同時に表示する表示部と、前記現在位置と前記車両用道路が一致しない時、前記カーマークを前記車両用道路上へ補正する車両位置補正部と、未登録道路推測部と、制御部とを有するナビゲーション装置を用いたナビゲーション方法であって、
前記現在位置計算部が前記現在位置を検出し、
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測し、
前記制御部が前記カーマークを前記車両用道路上へ補正しないように前記車両位置補正部を制御する
ことを特徴とするナビゲーション方法。
【請求項8】
前記未登録道路推測部が前記道路地図データに含まれていない車両用道路へ前記車両が進入することを前記車両の走行状態に基づいて推測することは、
3つの前記車両用道路が1つの交差点において交わるT字路の交差点と前記現在位置の距離を算出し、
前記車両の走行速度を検出し、
前記走行速度が前記敷居値を上回っている時、前記交差点において前記車両は直進すると推測し、前記走行速度が前記敷居値以下である時、前記交差点において前記車両は右左折すると推測する
ことを備えることを特徴とする請求項7記載のナビゲーション方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−17670(P2006−17670A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−198219(P2004−198219)
【出願日】平成16年7月5日(2004.7.5)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年7月5日(2004.7.5)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]