
ナビゲーション装置及びナビゲーション方法
【課題】1台のFM多重チューナにより受信周波数が異なる場合でもD−GPSとVICSのデータをほぼ同時に受信する。
【解決手段】地図データを記憶したCD−ROMを装着したCDブロック6 と、GPSアンテナ1 を接続して現在位置を測位するGPSブロック2 と、FMアンテナ4 を接続してFM放送電波を受信するFMチューナ14と、FM放送電波に多重化されたデータをデコードするFM多重デコーダ15と、FMチューナ14及びFM多重デコーダ15により交通情報のデータ及び上記複数の衛星から受信される信号の誤差情報のデータの一方を受信させ、同一周波数で他方のデータも受信できない際には周波数を変えて該他方のデータを受信させるCPU13と、得た交通情報及び誤差情報のデータを用いてCDブロック6 からの地図データを加工してモニタブロック7 で表示させるグラフィックコントローラ17とを備える。
【解決手段】地図データを記憶したCD−ROMを装着したCDブロック6 と、GPSアンテナ1 を接続して現在位置を測位するGPSブロック2 と、FMアンテナ4 を接続してFM放送電波を受信するFMチューナ14と、FM放送電波に多重化されたデータをデコードするFM多重デコーダ15と、FMチューナ14及びFM多重デコーダ15により交通情報のデータ及び上記複数の衛星から受信される信号の誤差情報のデータの一方を受信させ、同一周波数で他方のデータも受信できない際には周波数を変えて該他方のデータを受信させるCPU13と、得た交通情報及び誤差情報のデータを用いてCDブロック6 からの地図データを加工してモニタブロック7 で表示させるグラフィックコントローラ17とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車用等のナビゲーション装置及びこのナビゲーション装置に使用されるCD−ROM等の記憶媒体に関する。
【背景技術】
【0002】
従来より、GPS(Global Positioning System)を利用した自動車用のナビゲーション装置が広く普及している。この種のナビゲーション装置では、GPSアンテナで受信した複数の人工衛星からの信号を基に現在位置の緯度情報と経度情報とを計算し、CD−ROM等の記録媒体から読出した現在位置周辺の道路情報及び地名情報等からなる地図データを展開してモニタディスプレイで表示するようにしている。
【0003】
しかしながら、上記GPSにおいて、各衛星から受信される信号には、例えばその信号到達時間を変化させてしまう電離層遅延誤差や対流圏遅延誤差等、様々な誤差要因が含まれるため、これら誤差要因を含む衛星信号に基づき計測される移動位置には、必然的に誤差が生じることになる。
【0004】
そこで、地球上での正確な位置が予め明らかな固定基準局において、上記GPSにより基準局位置を計測し、該計測位置と上記予め明らかな基準局位置との差に応じた補正信号を作成し、例えばFMデータ多重放送として送信することにより、移動体側では、複数の衛星信号を受信してその移動位置を計測すると共に、この計測された移動位置を、上記FM放送として多重化されて受信された補正信号に応じて補正することで、きわめて高精度に移動体の移動位置を得るようにしたディファレンシャル方式のGPS、所謂D−GPSが考えられている。
【0005】
したがって、このD−GPSに対応したナビゲーション装置では、FM多重チューナを外付けあるいは内蔵することにより、移動位置をきわめて高い精度で検出することができる。
【0006】
ところで、近時、渋滞情報等の提供を行なうVICS(Vehicle Information and Communication System)サービスが一部の地域で始動した。このサービスは、渋滞、事故、規制等の交通情報を文字、簡易図形、あるいは地図の形で、FMデータ多重放送、光ビーコンあるいは電波ビーコンにより提供するものである。
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記D−GPS方式に対応したナビゲーション装置で、さらに上記VICSのサービスをFMデータ多重放送により受信するものとすると、1台のFM多重チューナによってD−GPSの補正情報とVICSの交通情報とを受信しなければならない。
【0008】
そのため、上記D−GPSの補正情報とVICSの交通情報が同一の周波数のFM放送電波に多重化されている場合は問題ないが、上記D−GPSの補正情報とVICSの交通情報が異なる周波数のFM放送電波に多重化されている場合には、手動で周波数を切換えてこれら2種類の情報を得るか、あるいは2台のFM多重チューナを備えるようにしなければならない。上記前者の手動で周波数を切換える方法は操作が非常に繁雑で実用的ではなく、また上記後者の2台のFM多重チューナを備えるものは装置の大型化、高コスト化を招くことになる。
【0009】
本発明は上記のような実情に鑑みてなされたもので、その目的とするところは、1台のFM多重チューナにより受信周波数が異なる場合でもD−GPSとVICSのデータをほぼ同時に受信することが可能なナビゲーション装置及びこのナビゲーション装置に使用される記憶媒体を提供することにある。
【課題を解決するための手段】
【0010】
請求項1記載の発明は、道路情報を含む地図データが記憶された地図データ記憶手段と、受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、この測位手段で得た現在位置に基づいて上記地図データ記憶手段から地図データを読出して、表示データとして展開する地図データ展開手段と、放送電波に多重化されて送られてくるデータを受信する受信手段と、この受信手段により交通情報のデータを受信させる第1の受信制御手段と、上記受信手段により上記受信した複数の衛星から送信される信号の誤差情報のデータを受信させる第2の受信制御手段と、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た表示データを加工する加工する加工手段と、この加工手段で得た表示データを表示する表示手段とを具備したことを特徴とする。
【0011】
このような構成とすれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信し、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【0012】
請求項2記載の発明は、上記請求項1記載の発明において、上記第1及び第2の受信制御手段のうち、少なくとも一方は周波数サーチを行なうことによりデータを受信させることを特徴とする。
【0013】
このような構成とすれば、上記請求項1記載の発明の作用に加えて、受信周波数が地域や時間等によってことなり、不明である場合であっても迅速に誤差情報のデータ及び交通情報のデータの少なくとも一方をサーチすることができる。
【0014】
請求項3記載の発明は、上記請求項2記載の発明において、上記第3の受信制御手段は、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、その同一周波数で他方のデータも受信できるか否かを判断し、他方のデータが受信できないと判断した際には上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させることを特徴とする。
【0015】
このような構成とすれば、上記請求項2記載の発明の作用に加えて、必要な場合にのみ周波数サーチを行なうため、処理が簡単となる。
【0016】
請求項4記載の発明は、上記請求項1乃至3いずれかに記載の発明において、上記第3の受信制御手段は上記第1及び第2の受信制御手段により上記交通情報のデータの内容の更新周期に対応してその受信の切換タイミングを設定することを特徴とする。
【0017】
このような構成とすれば、上記請求項1乃至3いずれかに記載の発明の作用に加えて、常に最新の交通情報のデータを継続して確実に受信することができる。
【0018】
請求項5記載の発明は、上記請求項1乃至4いずれかに記載の発明において、上記第3の受信制御手段は、上記第2の受信制御手段により放送電波に多重化されて送られてくる誤差情報のデータを受信させた際、その誤差情報のデータ内容に応じた周期で周波数を変えて上記第1の受信制御手段により交通情報のデータも受信させることを特徴とする。
【0019】
このような構成とすれば、上記請求項1乃至4いずれかに記載の発明の作用に加えて、必要最小限の誤差情報のデータを受信するだけで済み、交通情報のデータの受信に対する悪影響を極力少なくすることができる。
【0020】
請求項6記載の発明は、上記請求項1乃至4いずれかに記載の発明において、上記第3の受信制御手段は、上記第2の受信制御手段による放送電波に多重化されて送られてくる誤差情報のデータの受信タイミングに合わせて当該誤差情報のデータを受信させることを特徴とする。
【0021】
このような構成とすれば、上記請求項1乃至4いずれかに記載の発明の作用に加えて、誤差情報のデータの受信タイミングが周期的で且つデータフレーム中の短い期間である際には、誤差情報のデータの受信に伴って交通情報のデータから欠落した部分をデータフレーム中の他の部分からの訂正により復元することにより、結果として1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとを同時に受信することができる。
【0022】
請求項7記載の発明は、上記請求項6記載の発明において、上記受信手段は、放送電波の選局受信を行なう2つのチューナ部、これら2つのチューナ部のいずれかで受信した放送電波に多重化されて送られてくるデータをデコードするデコーダ部、及び上記2つのチューナ部のいずれかで受信した放送電波とを切換選択して上記デコーダ部に供給するスイッチ部を有し、上記第1の受信制御手段は、上記受信手段の2つのチューナ部の一方により交通情報のデータを受信させ、上記第2の受信制御手段は、上記受信手段の2つのチューナ部の他方により誤差情報のデータを受信させ、上記第3の受信制御手段は、上記受信手段のスイッチ部を切換設定することで誤差情報のデータと交通情報のデータの受信を切換えることを特徴とする。
【0023】
このような構成とすれば、上記請求項6記載の発明の作用に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を短縮し、交通情報のデータの受信で欠落する部分を減少させることができるため、交通情報のデータの復元が容易となり、ほぼ確実に交通情報のデータを得ることができるようになる。
【0024】
請求項8記載の発明は、上記請求項7記載の発明において、上記受信手段のデコーダ部は、上記他方のチューナ部で受信する誤差情報のデータが多重化された放送電波を遅延して入力する遅延回路をさらに有することを特徴とする。
【0025】
このような構成とすれば、上記請求項7記載の発明の作用に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を必要最小限に短縮し、交通情報のデータの受信で欠落する部分を大幅に減少させることができるため、交通情報のデータの復元がきわめて容易となり、確実に交通情報のデータを得ることができるようになる。
【0026】
請求項9記載の発明は、複数の衛星から送信される信号を受信する第1の受信手段と放送電波に多重化されて送られてくる交通情報のデータ及び上記複数の衛星から送信される信号の誤差情報のデータを受信する第2の受信手段とを有するナビゲーション装置のためのプログラムを記憶した記憶媒体であって、上記第2の受信手段により上記交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、第2の受信手段により周波数を変えて該他方のデータを受信させるプログラムを記憶したことを特徴とする。
【0027】
このような記憶内容とすれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信させ、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【発明の効果】
【0028】
請求項1記載の発明によれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信し、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【0029】
請求項2記載の発明によれば、上記請求項1記載の発明の効果に加えて、受信周波数が地域や時間等によってことなり、不明である場合であっても迅速に誤差情報のデータ及び交通情報のデータの少なくとも一方をサーチすることができる。
【0030】
請求項3記載の発明によれば、上記請求項2記載の発明の効果に加えて、必要な場合にのみ周波数サーチを行なうため、処理が簡単となる。
【0031】
請求項4記載の発明によれば、上記請求項1乃至3いずれかに記載の発明の効果に加えて、常に最新の交通情報のデータを継続して確実に受信することができる。
【0032】
請求項5記載の発明によれば、上記請求項1乃至4いずれかに記載の発明の効果に加えて、必要最小限の誤差情報のデータを受信するだけで済み、交通情報のデータの受信に対する悪影響を極力少なくすることができる。
【0033】
請求項6記載の発明によれば、上記請求項1乃至4いずれかに記載の発明の効果に加えて、誤差情報のデータの受信タイミングが周期的で且つデータフレーム中の短い期間である際には、誤差情報のデータの受信に伴って交通情報のデータから欠落した部分をデータフレーム中の他の部分からの訂正により復元することにより、結果として1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとを同時に受信することができる。
【0034】
請求項7記載の発明によれば、上記請求項6記載の発明の効果に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を短縮し、交通情報のデータの受信で欠落する部分を減少させることができるため、交通情報のデータの復元が容易となり、ほぼ確実に交通情報のデータを得ることができるようになる。
【0035】
請求項8記載の発明によれば、上記請求項7記載の発明の効果に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を必要最小限に短縮し、交通情報のデータの受信で欠落する部分を大幅に減少させることができるため、交通情報のデータの復元がきわめて容易となり、確実に交通情報のデータを得ることができるようになる。
【0036】
請求項9記載の発明によれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信させ、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【発明を実施するための最良の形態】
【0037】
(第1の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第1の実施の形態について図面を参照して説明する。
【0038】
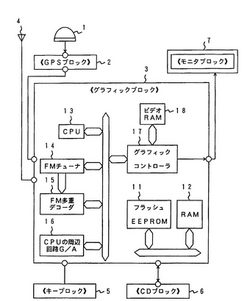
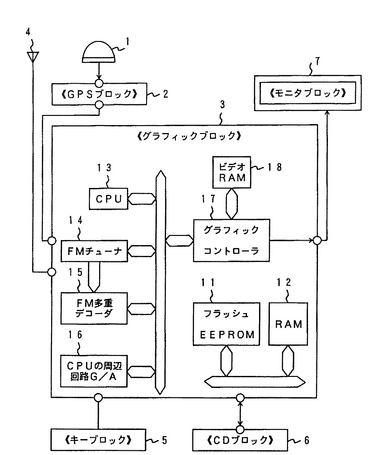
図1は本装置全体の回路構成を示すもので、GPS受信機能として車体のルーフ上に設置されたGPSアンテナ1と、このGPSアンテナ1が受信した複数のGPS衛星からのL1帯(1.57542GHz)のC/Aコードデータを逆拡散LSIにより復調、解読して現在地の緯度、経度、高さ、時刻等を割出すGPSブロック2とを有している。
【0039】
GPSブロック2はグラフィックブロック3に接続されており、このグラフィックブロック3には、他にもFMアンテナ4、後述するモードキーやカーソルキー等各種入力キーを有するキーブロック5、道路情報及び地名情報を含んだ地図データと動作プログラムとを記録した記録媒体であるCD−ROMが装着されたCDブロック6、例えばカラーLCDパネル及びその駆動回路で構成される表示装置を有するモニタブロック7がそれぞれ接続されている。
【0040】
グラフィックブロック3には、上記CDブロック6のCD−ROMから読出されてフラッシュEEPROM11に格納された動作プログラム及びRAM12に記憶された種々データに基づいて装置全体を制御するCPU13が設けられている。
【0041】
また、グラフィックブロック3内では、上記FMアンテナ4で受信したFM電波を復調して所望の放送局のFM復調信号を得るFMチューナ14、このFMチューナ14に接続されて上記FM復調信号に多重されているデータをデコードするFM多重デコーダ15、主として上記GPSブロック2、キーブロック5及びCDブロック6と上記CPU13との間のデータの入出力制御を行なうCPU周辺回路ゲートアレイ(G/A)16、及びグラフィックコントローラ17が上記フラッシュEEPROM11、RAM12及びCPU13と共にバス接続して設けられ、さらにグラフィックコントローラ17にはビデオRAM18が接続される。
【0042】
CPU13は、道路走行時において、上記GPSブロック2から現在地の緯度、経度のデータすなわち位置データが他の高さ、時刻等を表わすデータと共に送られてくると、FM多重デコーダ15でデコードされたFMデータ多重放送のD−GPSに基づく誤差情報のデータによりこれを補正し、補正した位置データによりCPU周辺回路G/A16を介して現在地周辺の地図データをCDブロック6から呼出し、表示データとしてビデオRAM18が接続されたグラフィックコントローラ17に送出する一方、同じくFM多重デコーダ15でデコードされたFMデータ多重放送のVICSに基づく交通情報を必要に応じて読出し、これを展開して上記グラフィックコントローラ17に送出してビデオRAM18の表示データに重畳させる。
【0043】
グラフィックコントローラ17では、CPU13から送られてきた交通情報を重畳した地図データをビデオRAM18上に展開して1画面毎の表示データを作成し、作成した表示データを上記モニタブロック7に送出して交通情報及び地図を表示させる。
【0044】
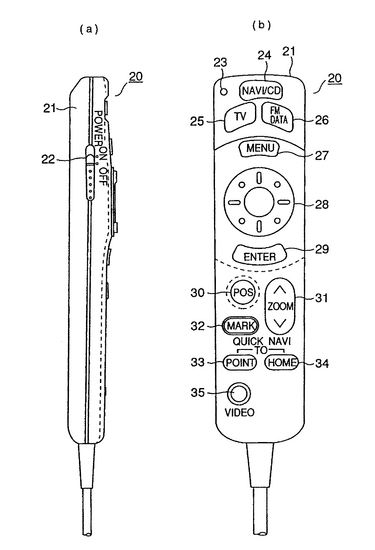
図2は上記キーブロック5を主として構成するリモコンユニット20の外観構成を示すもので、図2(a)が左側面図、図2(b)が上面図である。
【0045】
リモコンユニット20は、リモコン本体ケース21がケーブルにより接続されたワイヤードリモートコントローラであり、図2(a)に示すようにリモコン本体ケース21の左側面にスライドスイッチにより電源のオン/オフを行なう電源スイッチ22が設けられる。
【0046】
また、図2(b)に示すようにリモコン本体ケース21の上面には、電源LED23、NAVI/CDキー24、TVキー25、FM DATAキー26、MENUキー27、カーソルキー28、ENTERキー29、ポジションキー(図では「POS」と示す)30、縮尺変更/チューニングキー31、MARKキー32、POINTキー33、HOMEキー34及びVIDEOキー35を備える。
【0047】
電源LED23は、上記電源スイッチ22で電源がオンとされた際に赤色で点灯する。
【0048】
NAVI/CDキー24は、本装置でナビゲーション動作を行なう場合あるいは本実施の形態では説明を省略するがCDブロック6に音楽用のCDを装着して音楽鑑賞を行なう場合に操作するキーである。
【0049】
TVキー25は、本実施の形態では説明を省略するがグラフィックブロック3に図示しないテレビチューナを接続して上記モニタブロック7にてテレビ鑑賞を行なう場合に操作するキーであり、FM DATAキー26は、FM多重デコーダ15から得られるFMデータ多重放送の文字情報を上記モニタブロック7にて表示させる場合に操作するキーである。
【0050】
MENUキー27はメニュー画面の表示を指示するキー、カーソルキー28はメニュー画面等でモニタブロック7の表示画面上に表示されるカーソルの上下左右各方向への移動を指示するリング状のキー、ENTERキー29は上記カーソルキー28の移動により表示画面上のカーソルで指し示されるアイコン等を操作指示するためのキーである。
【0051】
また、ポジションキー30は上記アンテナ1及びGPSブロック2により割出された現在地の緯度、経度等を表示させるためのキー、縮尺変更/チューニングキー31はナビゲーション動作時に表示される地図の縮尺の変更指示を行なう一方、テレビあるいはラジオ受信動作時にアップ/ダウンチューニングを指示するキーである。
【0052】
さらに、MARKキー32は地図データの任意位置に経路誘導機能での通過位置等をマーキングするためのキー、POINTキー33は経路誘導機能の動作時に目的地の設定及び目的地側への画面スクロール等を指示するキー、HOMEキー34は同じく経路誘導機能の動作時に現在地の設定及び現在地側への画面スクロール等を指示するキーである。
【0053】
そして、VIDEOキー35は本実施の形態では説明を省略するがグラフィックブロック3に図示しないビデオカメラ等を接続して上記モニタブロック7にてビデオ鑑賞を行なう場合に操作するキーである。
【0054】
次に上記第1の実施の形態の動作について説明する。
【0055】
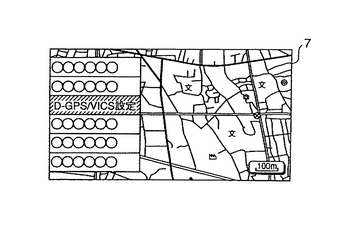
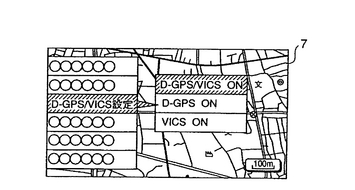
図3乃至図7はD−GPSとVICSそれぞれの設定状態を示すものである。すなわち、現在位置を含む地図を表示するナビゲーション動作の実行時にリモコンユニット20のMENUキー27を押下操作すると、図3に示すようにメニュー画面をモニタブロック7で表示する。ここで、図3に示す如く「D−GPS/VICS設定」の項目をカーソルキー28の操作により指定した状態でENTERキー29を操作すると、図4に示すようにサブメニュー画面を表示する。
【0056】
この図4のサブメニュー画面においては、D−GPSとVICSの双方の機能をオンさせるための「D−GPS/VICS ON」と、D−GPSの機能のみをオンさせるための「D−GPS ON」と、VICSの機能のみをオンさせるための「VICS ON」とが表示されるもので、そのうち先頭の「D−GPS/VICS ON」が反転表示される。
【0057】
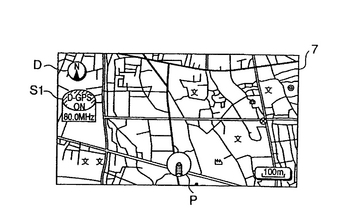
しかして、この図4に示した「D−GPS/VICS ON」が反転表示された状態からENTERキー29を操作すると、図5に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されていることを第1のシンボルS1で、またVICSの機能がオン設定されており、その交通情報のデータが例えば「82.5[MHz]」の周波数の放送電波に多重化されていて最新の情報が時刻「14:25」の時点のものであることを第2のシンボルS2でそれぞれ地図の方位を表わす方位記号Dと共に表示する一方、地図中ではVICS機能により得られた交通情報を基に、混雑している道路区間と比較的空いている道路区間とを例えば図示する如く色の異なる矢印を付加することで表示する。
【0058】
また、上記図4に示したサブメニュー画面の表示状態からカーソルキー28を操作して「D−GPS ON」が反転表示された状態でENTERキー29を操作すると、図6に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されていることを第1のシンボルS1で地図の方位を表わす方位記号Dと共に表示する。
【0059】
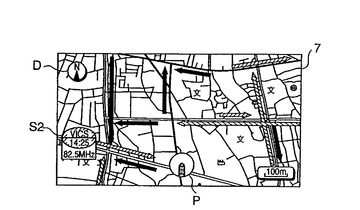
さらに、上記図4に示したサブメニュー画面の表示状態からカーソルキー28を操作して「VICS ON」が反転表示された状態でENTERキー29を操作すると、図7に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、VICSの機能がオン設定されており、その交通情報のデータが例えば「82.5[MHz]」の周波数の放送電波に多重化されていて最新の情報が時刻「14:25」の時点のものであることを第2のシンボルS2で地図の方位を表わす方位記号Dと共に表示する一方、地図中ではVICS機能により得られた交通情報を基に、混雑している道路区間と比較的空いている道路区間とを例えば図示する如く色の異なる矢印を付加することで表示する。
【0060】
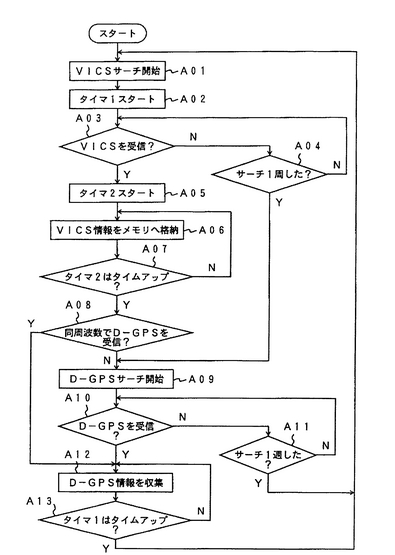
図8は、CPU13がGPSブロック2から位置データを取得すると同時に、上記図5で示したようにD−GPSの機能とVICSの機能を共にオンに設定した場合にFM多重デコーダ15から現在位置に関する誤差情報のデータと交通情報のデータとを取得する際の処理手順を示すもので、その当初にはVICSによる交通情報のデータのサーチを開始し(ステップA01)、併せてRAM12に設定する第1のタイマによる計時をスタートさせる(ステップA02)。
【0061】
ここで、VICSによる交通情報のデータのサーチは、FMチューナ14によるFMラジオ放送の周波数帯域、例えば76.0[MHz]から90.0[MHz]までをオートチューニング機能により0.1[MHz]ステップで順次受信し、放送電波があってサーチがストップした場合にはデータ多重放送がなされているか否かを判断し、且つデータ多重放送がなされている場合にはそれを1フレーム分受信してみてそれらの番組の中にVICSによるものがあるか否かを判断するもので(ステップA03)、上記RAM12の第1のタイマは、VICSサービスにおける交通情報の更新周期、例えば「5分」を計時するためのものである。
【0062】
ここで、VICSサービスにおける交通情報の更新周期は「5分」としたが、これは正確には「2分30秒」を単位とする交通情報を2回繰返して提供されるものとする。
【0063】
しかして、上記ステップA03により当該周波数で放送電波がないか、あるいはあってもデータ多重放送がなされていないか、あるいはデータ多重放送がなされていてもそれらの番組の中にVICSによるものがないと判断した場合には、次いでサーチを1周したか否か、すなわち同周波数帯域の最後の周波数90.0[MHz]にあっても同VICSによるものがなかったか否か判断する(ステップA04)。
【0064】
しかるに、このステップA04でサーチが1周していないと判断した場合には、さらに受信する周波数を0.1[MHz]だけプラスして上記ステップA03からの動作を繰返し実行する。
【0065】
そして、ステップA03で放送電波があって且つデータ多重放送がなされており、なおかつそれらの番組の中にVICSによるものがあると判断した時点で、RAM12に設定する上記交通情報の単位「2分30秒」を計時する第2のタイマの計時をスタートさせた後(ステップA05)、当該周波数で受信したVICSの交通情報を一旦RAM12に格納する(ステップA06)。
【0066】
その後、上記RAM12の第2のタイマの計時値が上述した限度値「2分30秒」となったか否か判断し(ステップA07)、なっていないと判断した場合には再度上記ステップA06に戻って受信したVICSの交通情報のデータをRAM12へ格納する、という処理を繰返し実行する。
【0067】
そして、ステップA07で上記RAM12の第2のタイマの計時値が上述した限度値「2分30秒」となったと判断した時点で、VICSの交通情報のデータを一通り受信し終えたこととなるので、次いでFMチューナ14による受信周波数を変えずに、このVICSの交通情報のデータを受信した同一周波数でD−GPSによる誤差情報のデータを受信することができるか否かを判断する(ステップA08)。
【0068】
このD−GPSによる誤差情報のデータは、データ多重放送のデータ1フレーム中の予め定められたパケット位置、例えば第1及び第2パケットに挿入されているもので、1フレームすべてを受信する必要はなく、上記予め定められたパケット位置にあるか否かにより判断を行なうことができる。
【0069】
しかるに、ステップA08で当該パケット位置にD−GPSによる誤差情報のデータがなく、VICSの交通情報のデータを受信したのと同一の周波数ではD−GPSによる誤差情報のデータを受信することができないと判断すると、次いで今度は同じくD−GPSによる誤差情報のデータのサーチを開始する(ステップA09)。
【0070】
ここで、D−GPSによる誤差情報のデータのサーチは、再びFMチューナ14によるFMラジオ放送の周波数帯域、例えば76.0[MHz]から90.0[MHz]までをオートチューニング機能により0.1[MHz]ステップで順次受信し、放送電波があってサーチがストップした場合にはデータ多重放送がなされているか否かを判断し、且つデータ多重放送がなされている場合にはそのフレーム中の特定パケット位置にD−GPSによるものがあるか否かを判断するもので(ステップA10)、当該周波数で放送電波がないか、あるいはあってもデータ多重放送がなされていないか、あるいはデータ多重放送がなされていてもそれらの番組の中にD−GPSによるものがないと判断した場合には、次いでサーチを1周したか否か、すなわち同周波数帯域の最後の周波数90.0[MHz]にあっても同D−GPSによるものがなかったか否か判断する(ステップA11)。
【0071】
しかるに、このステップA11でサーチが1周していないと判断した場合には、さらに受信する周波数を0.1[MHz]だけプラスして上記ステップA10からの動作を繰返し実行する。
【0072】
そして、ステップA10で放送電波があって且つデータ多重放送がなされており、なおかつそれらの番組の中にD−GPSによるものがあると判断した時点で、当該周波数で受信したD−GPSの誤差情報のデータを一旦RAM12に収集する(ステップA12)。
【0073】
その後、上記RAM12の第1のタイマの計時値が上述した限度値「5分」となったか否か判断し(ステップA13)、なっていないと判断した場合には再度上記ステップA12に戻って受信したD−GPSの誤差情報のデータをRAM12へ収集する、という処理を繰返し実行する。
【0074】
そして、ステップA13で上記RAM12の第1のタイマの計時値が上述した限度値「5分」となったと判断した時点で、更新されたVICSによる交通情報のデータを受信するべく、再び上記ステップA01に戻る。
【0075】
なお、上記ステップA04でVICSによる交通情報のデータが受信されないままにサーチが1周したと判断した場合には、該データを受信することができなかったものとして、そのまま上記ステップA09に進み、今度はD−GPSによる誤差情報のデータの受信のサーチに遷移する。
【0076】
また、上記ステップA08でVICSによる交通情報のデータを受信した周波数と同一周波数でD−GPSによる誤差情報のデータも受信することができると判断した場合には、上記ステップA09〜ステップA11によるサーチ動作を行なう必要がないので、そのままステップA12に遷移してその受信周波数において受信したD−GPSによる誤差信号のデータをRAM12に収集する。
【0077】
さらに、上記ステップA11でD−GPSによる誤差情報のデータが受信されないままにサーチが1周したと判断した場合には、該データを受信することができなかったものとして、そのまま上記ステップA01に戻り、再びVICSによる交通情報のデータの受信のサーチを行なう。
【0078】
上記のようにしてRAM12に格納したD−GPSによる誤差情報のデータに基づいてGPSブロック2から得た現在位置のデータを補正した上でCDブロック6から読出した地図データの展開を行ない、さらに展開した地図データ上にRAM12に格納したVICSによる交通情報のデータを重畳して表示させることで上記図5に示すような画面を得ることができるようになるものである。
【0079】
なお、上記VICSによる交通情報のデータは、実際には「レベル1」〜「レベル3」の3種類があり、上述したように地図データに直接重畳するものとして「レベル3」のものを用いる場合を例にとって示したが、地図データの一部にウィンドウを設けて「レベル1」による文字または「レベル2」による簡易図形のものを重畳表示するようにしてもよいものとする。
【0080】
また、上記図6で示したようにD−GPSの機能のみをオンとするよう設定した場合には、上記ステップA01〜A08の処理は省略してステップA09〜A13の処理(タイマー処理を除く)のみを実行する。
【0081】
反対に、上記図7で示したようにVICSの機能のみをオンとするよう設定した場合には、上記ステップA08〜A13の処理は省略してステップA01〜A07の処理(タイマー処理を除く)のみを実行する。
【0082】
また、上記実施の形態では、D−GPSの機能のオン/オフ時に際してモニタブロック7の表示画面では第2のシンボルS2の有無により判断する他なかったが、図9に示すようにD−GPSの機能のオン/オフ時によって地図データ中に表示する現在位置記号Pの大きさを可変設定するようにしてもよい。
【0083】
図10はD−GPSの機能をオフとして設定した場合、あるいはオンとして設定しながらもサーチの結果D−GPSによる誤差情報が得られなかった場合でのモニタブロック7の表示画面を例示するもので、画面左端に、D−GPSの機能がオフとなっていることを第1のシンボルS1′を表示すると共に、現在位置の誤差が最大100[m]程度であるため、上記図9でも示したように径の大きな現在位置記号Pを地図データ中に表示させている。
【0084】
これに対して、図11はD−GPSの機能をオンに設定し、且つ実際にFM多重デコーダ15よりD−GPSのデータを受信している場合でのモニタブロック7の表示画面を例示するもので、画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されて受信されていることを第1のシンボルS1で表示すると共に、現在位置の誤差がD−GPS機能オフ時の1/10程度に補正されているため、上記図9でも示したように径の小さな現在位置記号Pを地図データ中に表示させている。
【0085】
なお、上記図10におけるD−GPS機能オフ時の第1のシンボルS1′と図11におけるD−GPS機能オン時の第1のシンボルS1では、例えばD−GPS機能オフ時の第1のシンボルS1′をグレー、D−GPS機能オン時の第1のシンボルS1を緑というように色を異ならせて表示することで、より明確に視認可能となるものである。
【0086】
また、図8のフローチャートにおいて、D−GPSのサーチ監視を、VICS受信周波数から始めるようにしてもよい。さらに、VICS及びD−GPSの各受信周波数を一度サーチし、受信した後は、サーチを行なわずにその周波数情報に基づいてチューニングを制御するようにしてもよい。
【0087】
(第2の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第2の実施の形態について図面を参照して説明する。
【0088】
なお、本装置全体の回路構成は上記図1に、リモコンユニットの外観構成は上記図2に示したものとそれぞれ基本的に同様であるものとして、同一部分には同一符号を付してその説明は省略する。
【0089】
図12は上記FMチューナ14を中心とした回路構成を示すもので、図示する如くFMチューナ14はFM受信部14a、復調部14b、選局コントローラ14c、及び時間補正部14dから構成される。
【0090】
FM受信部14aは、FMアンテナ4で受信された電波中から選局コントローラ14cから入力されるチューニング電圧VTに対応した周波数を選局し、中間周波数信号に変換して復調部14bへ出力する。復調部14bでは、この中間周波信号に対してFM復調等の処理を行なうことでFM復調信号を得、得たFM復調信号をFM多重デコーダ15へ送出する。
【0091】
FM多重デコーダ15は、FM音声信号に多重化されているデータをデコードして得たVICSやD−GPSのデータ等を上記CPU13へ出力する一方、D−GPSデータ中の各ブロックの先頭位置にブロック同期及びフレーム同期を確立するために付加されているBIC(Block Identification Code:ブロック識別符号)信号を検出して上記FMチューナ14の時間補正部14dに送出する。
【0092】
時間補正部14dでは、FM多重デコーダ15からのBIC信号を読取り、そのタイミングに応じて選局コントローラ14cによる選局動作の切換えタイミングを補正する。選局コントローラ14cは、CPU13からの指示に基づき、選局動作時に内部のクロックのカウントによってチューニング電圧VTを発生して上記FM受信部14aへ出力するもので、その切換タイミングは上記時間補正部14dからの信号により補正される。
【0093】
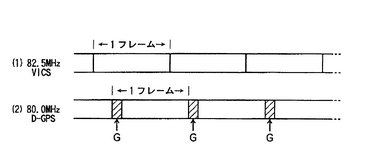
いま図13(1)に示すように周波数82.5[MHz]のFM放送電波にVICSのデータが多重化されて送られてきている一方、図13(2)に示すように周波数80.0[MHz]のFM放送電波にD−GPSのデータが多重化されて送られてきているものとする。
【0094】
80.0[MHz]のD−GPSのデータGは、図示する如く各フレームの先頭2パケット(ブロック)に予め位置が固定されている。また、周波数間でのフレーム同期はとられていないので、周波数80.0[MHz]の多重化データのフレームと82.5[MHz]の多重化データのフレームは受信タイミングにずれを生じている。
【0095】
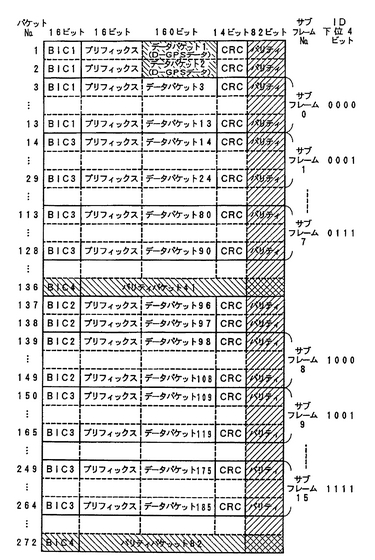
FM放送に多重化されるデータは、1フレーム当たり5(秒)で伝送される272ブロックのパケットを有し、そのうち先頭の2つのデータパケットが上述した如くD−GPSの伝送パケットとして割当てられる。
【0096】
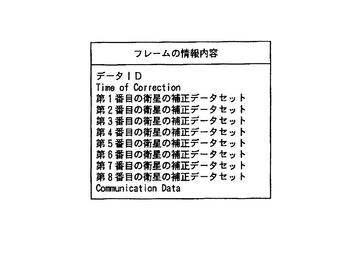
図14は上記2パケットに割当てられたD−GPS用のデータの内容を示す図である。すなわち、D−GPS用データとしては、そのデータ識別番号(データID),補正値データの作成時刻(Time of Correction)に続いて、例えば第1番目乃至第8番目の8つのGPS衛星からの受信信号に基づき得られた各衛星に対応する補正データセット、及び各衛星それぞれの正常/異常を示すコミュニケーションデータ(Communication Data)が与えられる。
【0097】
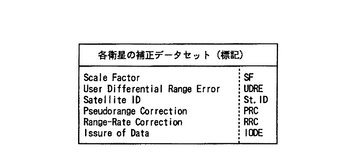
図15は上記D−GPS用データとして与えられた各衛星の補正データセットの内容を示す図である。すなわち、例えば衛星1〜衛星8のそれぞれに対応する補正データセットとしては、疑似距離補正値(PRC)のスケールファクタ(Scale Factor:SF)、ユーザ・ディファレンシャル距離誤差指数(User Differential Range Error:UDER)、衛星識別番号(Satellite ID:St.ID)、疑似距離の補正値(Pseudorange Correction:PRC)、該疑似距離補正値(PRC)の1秒当りの変化率である距離変化率の補正値(Range Rate Correction:RRC)、及び衛星の軌道データを示すデータ発行番号(Issue Of Data:IODE)が与えられる。
【0098】
次いで、動作時の具体的な処理内容について図16により説明する。
【0099】
なお、この処理を開始する前処理として、D−GPSデータが受信記憶されており、D−GPSデータを送っている周波数80.0[MHz]の多重化データに対するフレーム同期及びブロック同期が確立されているものとする。
【0100】
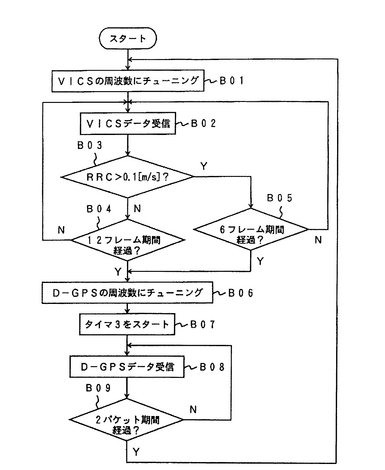
その処理当初には、VICSのデータを受信するべくCPU13がFMチューナ14の選局コントローラ14cにVICSのデータを多重化しているFM放送の周波数の選局を指示する制御信号を送出することにより、選局コントローラ14cが当該周波数、例えば上記図13(1)で示した82.5[MHz]に対応したチューニング電圧VTを発生してFM受信部14aへ送出し、当該周波数の放送を選局させる(ステップB01)。
【0101】
FM受信部14aがこのチューニング電圧VTに従って82.5[MHz]の放送電波を選局、受信し、復調部14bからFM復調信号を出力すると、FM多重デコーダ15はこのFM復調信号に多重化されているデータをデコードし、BICを時間補正部14dへ出力する一方、VICSのデータをCPU13へ出力する(ステップB02)。
【0102】
ここでCPU13は、すでに受信してRAM12に保持していた、D−GPSのデータ中の上記図15で示したRRCを読出し、その値が予め設定されている値、例えば0.1[m/秒]を越えているか否かを判断するもので(ステップB03)、0.1[m/秒]を越えておらず、各GPS衛星からの信号により得た現在位置のデータが比較的正確であると判断した場合には、次いでこのVICSのデータを受信してから12フレーム期間(1分間)だけ経過したか否か判断し(ステップB04)、経過していない場合には再び上記ステップB02に戻ってVICSのデータの受信を続行する。
【0103】
また、上記ステップB03でRAM12に保持していたRRCの値が予め設定されている値、例えば0.1[m/秒]を越えていると判断した場合には、各GPS衛星からの信号により得た現在位置のデータが比較的誤差を多く含んでいるものとして、次いでこのVICSのデータを受信してから6フレーム期間(30秒間)だけ経過したか否か判断し(ステップB05)、経過していない場合には再び上記ステップB02に戻ってVICSのデータの受信を続行する。
【0104】
このようにRRCの値に応じた複数フレーム期間だけVICSのデータを連続して受信し、その期間が終了したと判断した時点(80.0[MHz]の多重化データのフレーム開始タイミング)で(ステップB04,B05)、次いでCPU13はFMチューナ14の選局コントローラ14cに対してD−GPSのデータを多重化しているFM放送の周波数の選局を指示する制御信号を送出することにより、選局コントローラ14cが当該周波数、例えば上記図13(2)で示した80.0[MHz]に対応したチューニング電圧VTを発生してFM受信部14aへ送出し、当該周波数の放送を選局させる(ステップB06)。
【0105】
選局後、フレームの開始タイミングで選局コントローラ14cは、D−GPSのデータの受信時間(2ブロック)を計時するための内部タイマ(図では「タイマ3」と示す)の動作をスタートさせるもので(ステップB07)、その後、FM受信部14aがこのチューニング電圧VTに従って80.0[MHz]の放送電波を受信し、復調部14bからFM復調信号を出力すると、FM多重デコーダ15はこのFM復調信号に多重化されているデータをデコードし、BICを時間補正部14dへ出力する一方、得たD−GPSのデータをCPU13へ出力する(ステップB08)。
【0106】
このとき時間補正部14dでは、FM多重デコーダ15から順次送られてくるBICのビットパターンの変化により80.0[MHz]の多重化データのブロックの先頭位置となったタイミングを検出して上記選局コントローラ14cの内部タイマ(上記タイマ3とフレームタイマ)を補正するもので、その後、この選局コントローラ14cのタイマ3の計時により上記2パケット期間分だけ経過したか否か判断し(ステップB09)、経過していない場合には再び上記ステップB08に戻ってD−GPSのデータの受信を続行する。
【0107】
そして、選局コントローラ14cのタイマ3の計時により2パケット期間分だけ経過したと判断した時点で、受信したD−GPSのデータにより後述するディファレンシャル補正値生成その他の処理を実行すると共に、再び上記ステップB01に戻ってVICSのデータの受信処理に復帰する。
【0108】
しかるに、上記D−GPSのデータを2パケット分受信した毎にCPU13は、同時に以下に示すディファレンシャル補正値生成処理を実行するものである。
【0109】
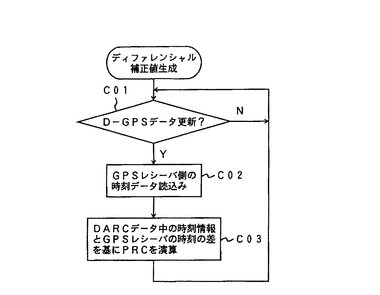
図17はその処理内容を示すもので、CPU13はFM多重デコーダ15に受信されているD−GPSのデータの更新を随時待機し(ステップC01)、更新がなされたと判断した時点でGPSブロック2から現在の衛星受信時刻を読込む(ステップC02)。
【0110】
CPU13は、前記GPSブロック2から読込んだ衛星受信時刻と、FM多重デコーダ15からのD−GPSのデータに含まれる疑似距離補正値PRC、距離変化率補正値RRCの補正値作成時刻との差に基づき、PRC,RRCに対する演算処理を実行し、GPSブロック2における現在の衛星受信時刻に合わせた疑似距離補正値PRCを算出し(ステップC03)、その後に再び上記ステップC01に戻る、という動作を繰返し実行するものである。
【0111】
こうして求めた現在の衛星受信時刻に合わせた疑似距離補正値PRCは、その距離変化率補正値RRCと共にGPSブロック2に送出されるもので、距離変化率補正値RRCはさらに上述した如くその値の内容によってVICSのデータを連続して受信するフレーム期間の基準とするようになる。
【0112】
このように、距離変化率補正値RRCを用いてGPSブロック2より得られる現在位置のデータに補正が必要と思われる度合いに応じた頻度で該補正処理を行ないながら同時にFMチューナ14で受信周波数を切換えてVICSのデータもでき得る限り連続して受信するようにしたので、D−GPSのデータを多重化している放送電波とVICSのデータを多重化している放送電波とで周波数が異なっていたとしても、これを自動的に適切に切換え、現在位置を常に正確に認識した上で必要な交通情報をより多く連続して受信することができる。
【0113】
(第3の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第3の実施の形態について図面を参照して説明する。
【0114】
なお、本装置全体の回路構成は上記図1に、リモコンユニットの外観構成は上記図2に示したものとそれぞれ基本的に同様であるものとして、同一部分には同一符号を付してその説明は省略する。
【0115】
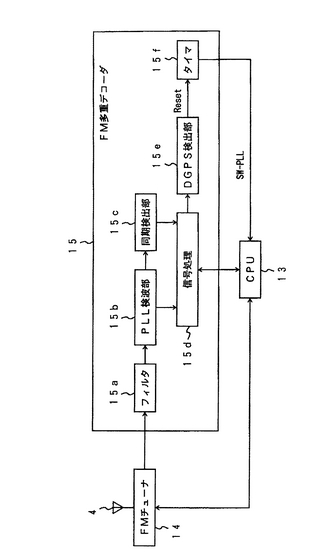
図18は主として上記FM多重デコーダ15の詳細な回路構成を示すもので、図示する如くFM多重デコーダ15はフィルタ15a、PLL検波部15b、同期検出部15c、信号処理部15d、D−GPS検出部15e、及びタイマ15fから構成される。
【0116】
フィルタ15aは、FMアンテナ4で受信され、FMチューナ14で電波中から選局して得たFM復調信号中からデジタルデータが多重されている副搬送波周波数の76KHz帯域のみを抽出するもので、その出力はPLL検波部15bに送られる。
【0117】
PLL検波部15bは、フィルタ15aの出力に対してL−MSK方式に基づいた、ステレオ音声信号の変調度に応じた遅延検波を行なってデジタルデータを復調した後に、そのビット同期をとることでデジタルPLLをかけて該デジタルデータに同期したクロックを再生し、復調したデジタルデータを同期検出部15c及び信号処理部15dへ、再生したクロックを同期検出部15cへそれぞれ送出する。
【0118】
同期検出部15cは、デジタルデータを再生されたクロックでサンプリングしてデータ中の各ブロック(パケット)の先頭に付されているBICを検出することによりデータ中のブロックに同期したブロック同期信号を作成し、またBICの種類の変化点を検出することによりフレーム同期信号を作成するもので、作成したブロック同期信号及びフレーム同期信号を信号処理部15dへ出力する。
【0119】
信号処理部15dは、CPU13の制御の下に、PLL検波部15bから送られてくるデジタルデータに対し、同期検出部15cから送られてくるブロック同期信号及びフレーム同期信号に基づいてスクランブルを解除し、誤り訂正及びデータ中のCRC(Cyclic Redundancy Code:循環冗長符号)のチェックを行なった後に、FM多重デコーダ15外のCPU13へ出力する一方、D−GPS検出部15eへも出力する。
【0120】
D−GPS検出部15eは、データ多重放送のデータ1フレーム中の第1及び第2パケットに挿入されているD−GPSによる誤差情報のデータの有無を検出し、検出した時点でタイマ15fへのリセット信号の送出を開始し、その受信を終えた時点で送出を停止する。
【0121】
タイマ15fは、FM多重デコーダ15からのリセット信号によりリセットされた後に、予め設定された時間を計時するもので、タイムアップした時点、すなわち上記予め設定された時間を計時し終えた時点から次にリセット信号が入力されるまでの時点の間、オンとなるような受信周波数切換信号SW−PLLを上記CPU13へ送出する。
【0122】
CPU13は、タイマ15fからの受信周波数切換信号SW−PLLにも対応してFMチューナ14で選局するFM放送電波の周波数を制御させる一方、信号処理部15dから得られる訂正済みのデジタルデータに基づいた処理を実行する。
【0123】
次いで上記第3の実施の形態の動作について説明する。
【0124】
いま周波数82.5[MHz]のFM放送電波にVICSのデータが多重化されて送られてきている一方、周波数80.0[MHz]のFM放送電波にD−GPSのデータが多重化されて送られてきているものとする。
【0125】
80.0[MHz]のD−GPSの誤差情報のデータは、図19に示す如く272ブロックのパケットからなる各フレームの先頭2パケット(ブロック)に予め位置が固定されている。また、周波数間でのフレーム同期はとられていないので、周波数80.0[MHz]の多重化データのフレームと82.5[MHz]の多重化データのフレームは受信タイミングにずれを生じている。
【0126】
CPU13はまずFMチューナ14により受信周波数をサーチさせ、周波数80.0[MHz]のFM放送電波にD−GPSの誤差情報のデータが多重化されていること、及び周波数82.5[MHz]のFM放送電波にVICSの交通情報のデータが多重化されていることを認識したものとする。
【0127】
その後、CPU13はFMチューナ14によりまず周波数82.5[MHz]のFM放送電波を受信させ、FM放送電波に多重化されているデジタルデータの毎フレームの先頭2パケットで得られるD−GPSの誤差情報のデータの検出をD−GPS検出部15eにより行なわせる。
【0128】
D−GPS検出部15eがD−GPSの誤差情報のデータを検出した時点からその受信を終えるまでタイマ15fにリセット信号を送出すると、タイマ15fはこのリセット信号にリセットされて計時を開始すると共にCPU13への受信周波数切換信号SW−PLLを“L”レベルとする。このとき、CPU13は同時に信号処理部15dから得られるD−GPSの誤差情報のデータをラッチしておく。
【0129】
CPU13では、タイマ15fからの受信周波数切換信号SW−PLLが“L”レベルとなるのに対応してFMチューナ14で周波数82.5[MHz]のFM放送電波を受信するように切換させ、そのFM放送電波に多重化されているVICSの交通情報のデータの受信を開始させるもので、以後、タイマ15fからの受信周波数切換信号SW−PLLが“H”レベルとなるまで、すなわち再び次のD−GPSの誤差情報のデータを受信するべく受信周波数を80.0[MHz]に切換えるまでの間、VICSの交通情報のデータの受信を続行する。
【0130】
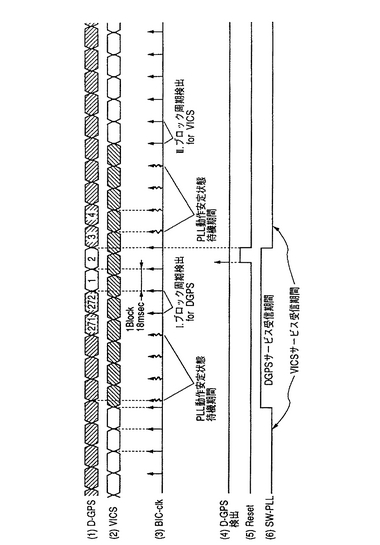
図20はD−GPSの誤差情報のデータを受信している期間を中心とした上記各部での動作を示すもので、図20(1)が受信周波数80.0[MHz]のFM放送電波に多重化されているD−GPSの誤差情報のデータ、図20(2)が周波数82.5[MHz]のFM放送電波に多重化されているVICSの交通情報のデータを示し、図中の数値がデータパケットの番号、ハッチングで示す部分が受信における欠落したデータ部分を表わす。
【0131】
通常、受信周波数の切換えに際して、PLLがロックし、多重化されているデジタルデータをデコードして安定して得ることが可能となるまでの時間は10〜20[msec]であるが、選局する2局の間の周波数の差が大きいほどさらに時間を要し、回路のハードウェア構成によっても左右されるので、ここでは最も余裕を持って充分安定するまでに60[msec]を要するものとしてある。因みに、デジタルデータは1フレームを5秒かけて受信するため、1パケット(ブロック)(=34バイト)当りに要する時間は18[msec]となる。
【0132】
したがって、タイマ15fには、上記D−GPS検出部15eからのリセット信号によりリセットされてから、次にデータパケット1のD−GPSの誤差情報のデータが受信される60[msec]前の時点までの間を計時するように予めその計時値が設定されるものとする。
【0133】
しかして、データパケット1のD−GPSの誤差情報のデータが受信される60[msec]前の時点となり、図20(6)に示すようにタイマ15fがタイムアップしてその出力する受信周波数切換信号SW−PLLが“H”となると、CPU13は上述したようにそれまでのVICSによる交通情報のデータの受信からD−GPSによる誤差情報のデータの受信に切換えるべくFMチューナ14での受信周波数を制御する。
【0134】
図20(3)はこのVICSによる交通情報のデータまたはD−GPSによる誤差情報のデータの受信に伴って得られるデジタルデータのBICクロックの状態を示すもので、直線の矢印が安定して受信できている状態、波線の矢印が不安定な状態を示す。
【0135】
周波数80.0[MHz]のFM放送電波の受信に切換えた後、同図(3)中にIで示すように動作が安定した状態で、実際にデータパケット1及び2のD−GPSの誤差情報のデータを受信する。
【0136】
データパケット1のD−GPSの誤差情報のデータが受信され、信号処理部15dで訂正等の処理が施された後に図20(4)に示すようにD−GPS検出部15eで検出されると、図20(5)に示すようにD−GPS検出部15eからタイマ15fへkリセット信号の送出が開始される。
【0137】
タイマ15fでは、データパケット2のD−GPSによる誤差情報のデータの受信をちょうど終える、このリセット信号の立下がりのタイミングで、計時内容をリセットして再度計時を開始すると共に、CPU13への受信周波数切換信号SW−PLLを再び“L”レベルとし、FMチューナ14での受信周波数を再度82.5[MHz]に切換えさせて、VICSの交通情報のデータを受信させる。
【0138】
この切換えから60[msec]経過し、同図(3)中にIIで示すように動作が安定すると、実際にVICSによる交通情報のデータを受信できるようになる。
【0139】
ここで、VICSによる交通情報のデータについて考えると、D−GPSによる誤差情報のデータ受信のために受信周波数を切換えてから実際に動作が安定して該データを受信し、その後再びVICSによる交通情報のデータ受信のために受信周波数を切換えて動作が安定するまでの間に、図20(2)に示すように12パケット(ブロック)が欠落することになる。
【0140】
上記図19に示した如く、FM放送電波に多重されているデータは、1フレーム中で、パリティにより縦方向と横方向の合わせて2重の訂正が可能となっており、D−GPSによる誤差情報のデータは信号処理部15dによって横方向、ブロック単位での1回の訂正処理の後に即有効であるものとして使用することができる。また、VICSによる交通情報のデータは2回の訂正後に使用することが決められている。
【0141】
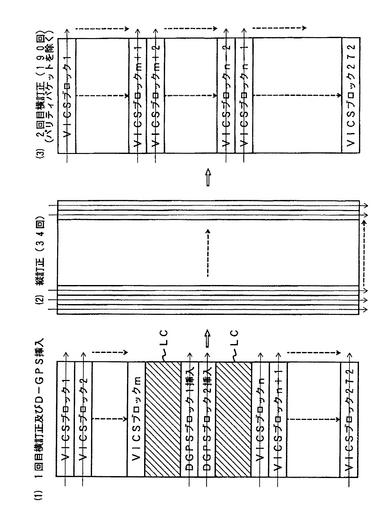
図21は信号処理部15dによって多重データを記憶するフレームメモリを用いて実行される、VICSによる交通情報のデータの訂正の過程を示すもので、まず図21(1)に示すように、1フレーム分、全272パケットから欠落を生じたパケットを除いたものについて、D−GPSによる誤差情報のデータを挿入した上で、1回目の横方向、すなわちパケット単位での訂正を行なう。
【0142】
D−GPSによる誤差情報のデータに関しては、この1回目の横方向の訂正処理により、上述した如く即有効なものであるとして後の処理で使用する。
【0143】
したがって、同図(1)中、ハッチングで示す欠落部分LCは、PLLによる動作が不安定でVICSによる交通情報のデータが受信できなかったパケットとなる。
【0144】
次いで、図21(2)に示すように2回目の訂正としてデータフレームの縦方向の訂正処理を行なう。この訂正処理はフレーム単位で行なうものであるので、異なるフレームであるD−GPSによる誤差情報のデータはキャンセルし、1バイト毎に全34回の訂正処理を実行する。
【0145】
その後、この縦方向の訂正を行なったデータフレームに対して図21(3)に示すように2回目の横方向の訂正を行なう。この場合、訂正処理を行なうのは1フレーム全272パケット中、パリティパケットを除いた190パケットのみである。
【0146】
こうして計3回の訂正処理を実行することにより、欠落部分CLを含むVICSによる交通情報のデータを復元することができ、結果としてFMチューナ14及びFM多重デコーダ15が共に1個ずつの構成としながら、受信周波数が異なるD−GPSによる誤差情報のデータとVICSによる交通情報のデータとを同時に受信することができる。
【0147】
なお、上記図21(1)では1回目の横方向の訂正処理に際してD−GPSによる誤差情報のデータを挿入するものとして説明したが、これは一般にFMデータ多重放送で使用している信号処理部15d内に設けられるフレームメモリをそのまま使用して訂正処理を実施することができるためであり、D−GPSによる誤差情報のデータを挿入せずとも実施することは可能であるが、その場合には、D−GPSによる誤差情報のデータを記憶して訂正処理を施すためのメモリが別途必要となる。
【0148】
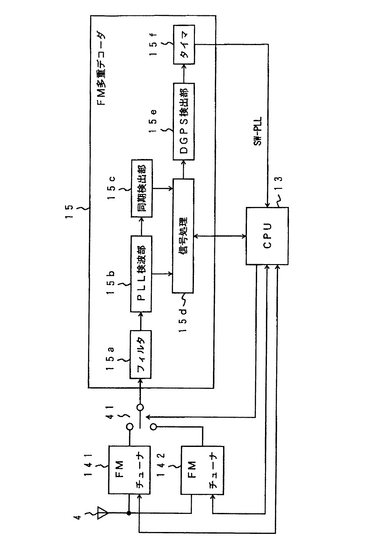
また、上記図18に示した回路構成に代えて、図22に示すようにFMアンテナ4に対してFMチューナ14と同様構成の2台のFMチューナ141,142を並列接続し、各FMチューナ14a,14bの出力をCPU13からの制御により動作するスイッチ41により切換選択してFM多重デコーダ15のフィルタ15aに供するものとすることも考えられる。
【0149】
この場合、例えばFMチューナ141により受信周波数82.5[MHz]のFM放送電波を、FMチューナ142により受信周波数80.0[MHz]のFM放送電波をそれぞれ受信させるものとすれば、各チューナ141,142はそれぞれ安定した状態で受信を続行しながら、FM放送電波に多重化されているデータを切換えて得ることができる。
【0150】
そのため、1台のFMチューナ14で受信周波数を切換えることでPLL動作が安定するまでの間、放送電波に多重化されているデジタルデータの受信が欠落する、などということがなく、FM多重デコーダ15自体は1台のみの構成としながら、データパケットの欠落した部分を大幅に削減することができ、データ訂正の処理における負担を軽減してほぼ確実にVICSによる交通情報のデータを得ることができる。
【0151】
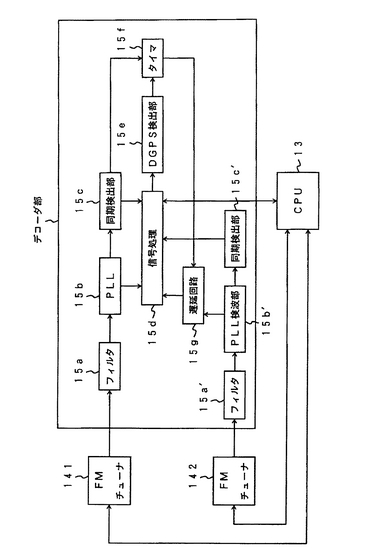
さらに、上記図22の回路構成に代えて、図23に示すようにスイッチ41を廃し、FMチューナ142の出力からデジタルデータを得るための、上記フィルタ15a、PLL検波部15b、及び同期検出部15cと同様構成のフィルタ15a′、PLL検波部15b′、及び同期検出部15c′と遅延回路15gとをFM多重デコーダ15内に加えて設けることも考えられる。
【0152】
この場合、例えばFMチューナ141により受信周波数82.5[MHz]のFM放送電波を、FMチューナ142により受信周波数80.0[MHz]のFM放送電波をそれぞれ受信させるものとし、フィルタ15a、PLL検波部15b、及び同期検出部15cをVICSによる交通情報のデータを得るための回路、フィルタ15a′、PLL検波部15b′、及び同期検出部15c′をD−GPSによる誤差情報のデータを得るための回路として独立して動作させ、且つタイマ15fの動作により得られたD−GPSの誤差情報のデータを遅延回路15gで遅延保持させることで、D−GPSの誤差情報のデータとVICSによる交通情報のデータとの位相差を吸収させるものとする。
【0153】
こうすることで、FMチューナ及びFM多重デコーダにおける回路構成は幾分複雑なものとなってしまうものの、VICSによる交通情報のデータの欠落を必要最小限のD−GPSによる誤差情報のデータに相当する2パケット分のみに抑えることができ、データ訂正の処理における負担を極力軽減して、確実にVICSによる交通情報のデータを得ることができる。
【0154】
なお、上記図23の回路構成において、タイマ15f及び遅延回路15gにより、D−GPSによる誤差情報のデータの処理で欠落する2パケット分のVICSによる交通情報のデータがパリティパケットを回避するようにタイミング制御するものとすれば、訂正処理をより確実に行なって正確なVICSによる交通情報のデータを復元することができるため、大きな効果を奏するものとなる。
【0155】
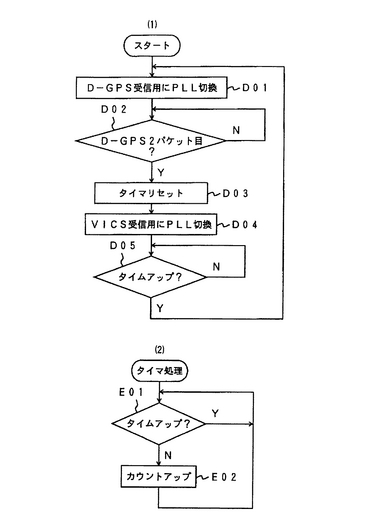
また、上記図18、図22、及び図23はいずれもハードウェアによる回路構成で対処した場合を説明したが、そのような構成の回路を用いずとも、ソフトウェアによる処理のみで対処することも可能である。
【0156】
この場合、図24(1)に示すようにCPU13はD−GPSによる誤差情報のデータを受信すべくFMチューナ14の受信周波数を切換設定し(ステップD01)、実際にデータパケット1及びデータパケット2の2パケット分のD−GPSによる誤差情報のデータを受信するのを待機した後(ステップD02)、内部タイマをリセットして(ステップD03)、今度はVICSによる交通情報のデータを受信すべくFMチューナ14の受信周波数を再度切換設定する(ステップD04)。
【0157】
その後、VICSによる交通情報のデータを受信しながら該タイマがタイムアップするまで待機し(ステップD05)、タイムアップしたと判断した時点で上記ステップD01に戻る、という動作を繰返し実行するものである。
【0158】
このとき、図24(2)に示すようにCPU13の内部タイマは所定クロック毎にタイムアップしているか否かを判断し(ステップE01)、していない場合には計時値をカウントアップするものとなる(ステップE02)。
【0159】
このようにソフトウェアにより上記図18に説明した構成の回路と同等の動作を実現することができ、ナビゲーション装置を買替えずとも、装置の動作プログラムを記憶した記憶媒体を交換するのみで対処することができる。
【0160】
なお、上記第1乃至第3の実施の形態において記載した手法は、ナビゲーション装置に実行させるためのプログラムとしてCDブロック6に装着されたCD−ROMに記憶されているものとして説明したが、記憶媒体としてはこれに限定するものではなく、他の記憶媒体、例えば磁気ディスク(フロッピー(登録商標)ディスク、ハードディスク等)、光ディスク(DVD、データMD等)、半導体メモリなどに書込んで各種装置に適用したり、通信媒体により伝送して各種装置に適用することも可能であり、また自動車搭載用のナビゲーション装置のみならず、これらの各種装置を装着することによりパーソナルコンピュータ等のデータ処理装置に適用することも可能であるものとする。
【0161】
その他、本発明はその要旨を逸脱しない範囲内で種々変形して実施することが可能である。
【図面の簡単な説明】
【0162】
【図1】本発明の第1の実施の形態に係る全体の回路構成を示すブロック図。
【図2】同実施の形態に係るリモコンユニットの外観構成を示す図。
【図3】同実施の形態に係る表示画面を例示する図。
【図4】同実施の形態に係る表示画面を例示する図。
【図5】同実施の形態に係る表示画面を例示する図。
【図6】同実施の形態に係る表示画面を例示する図。
【図7】同実施の形態に係る表示画面を例示する図。
【図8】同実施の形態に係る動作処理の内容を示すフローチャート。
【図9】同実施の形態に係る表示画面中の現在位置記号の表示態様を示す図。
【図10】同実施の形態に係る表示画面を例示する図。
【図11】同実施の形態に係る表示画面を例示する図。
【図12】本発明の第2の実施の形態に係る主としてFMチューナの回路構成を示すブロック図。
【図13】同実施の形態に係る交通情報と誤差情報の受信タイミングの相違を示す図。
【図14】同実施の形態に係るD−GPSのデータの内容を示す図。
【図15】同実施の形態に係る上記D−GPSのデータとして与えられた各衛星の補正データセットの内容を示す図。
【図16】同実施の形態に係る動作処理の内容を示すフローチャート。
【図17】同実施の形態に係る動作処理の内容を示すフローチャート。
【図18】本発明の第3の実施の形態に係る主としてFM多重デコーダの回路構成を示すブロック図。
【図19】同実施の形態の動作を説明する図。
【図20】同実施の形態の動作を説明するタイミングチャート。
【図21】同実施の形態の動作を説明する図。
【図22】同実施の形態に係る主としてFMチューナ及びFM多重デコーダの他の回路構成を示すブロック図。
【図23】同実施の形態に係る主としてFMチューナ及びFM多重デコーダの他の回路構成を示すブロック図。
【図24】同実施の形態に係るソフトウェアで実現した場合の動作処理内容を例示するフローチャート。
【符号の説明】
【0163】
1…GPSアンテナ
2…GPSブロック
3…グラフィックブロック
4…FMアンテナ
5…キーブロック
6…CDブロック
7…モニタブロック
11…フラッシュEEPROM
12…RAM
13…CPU
14…FMチューナ
14a…FM受信部
14b…復調部
14c…選局コントローラ
14d…時間補正部
15…FM多重デコーダ
15a…フィルタ
15b…PLL検波部
15c…同期検出部
15d…信号処理部
15e…D−GPS検出部
15f…タイマ
15g…遅延回路
16…CPU周辺回路ゲートアレイ(G/A)
17…グラフィックコントローラ
18…ビデオRAM
20…リモコンユニット
21…リモコン本体ケース
22…電源スイッチ
23…電源LED
26…FM DATAキー
41…スイッチ
141,142…FMチューナ
【技術分野】
【0001】
本発明は、自動車用等のナビゲーション装置及びこのナビゲーション装置に使用されるCD−ROM等の記憶媒体に関する。
【背景技術】
【0002】
従来より、GPS(Global Positioning System)を利用した自動車用のナビゲーション装置が広く普及している。この種のナビゲーション装置では、GPSアンテナで受信した複数の人工衛星からの信号を基に現在位置の緯度情報と経度情報とを計算し、CD−ROM等の記録媒体から読出した現在位置周辺の道路情報及び地名情報等からなる地図データを展開してモニタディスプレイで表示するようにしている。
【0003】
しかしながら、上記GPSにおいて、各衛星から受信される信号には、例えばその信号到達時間を変化させてしまう電離層遅延誤差や対流圏遅延誤差等、様々な誤差要因が含まれるため、これら誤差要因を含む衛星信号に基づき計測される移動位置には、必然的に誤差が生じることになる。
【0004】
そこで、地球上での正確な位置が予め明らかな固定基準局において、上記GPSにより基準局位置を計測し、該計測位置と上記予め明らかな基準局位置との差に応じた補正信号を作成し、例えばFMデータ多重放送として送信することにより、移動体側では、複数の衛星信号を受信してその移動位置を計測すると共に、この計測された移動位置を、上記FM放送として多重化されて受信された補正信号に応じて補正することで、きわめて高精度に移動体の移動位置を得るようにしたディファレンシャル方式のGPS、所謂D−GPSが考えられている。
【0005】
したがって、このD−GPSに対応したナビゲーション装置では、FM多重チューナを外付けあるいは内蔵することにより、移動位置をきわめて高い精度で検出することができる。
【0006】
ところで、近時、渋滞情報等の提供を行なうVICS(Vehicle Information and Communication System)サービスが一部の地域で始動した。このサービスは、渋滞、事故、規制等の交通情報を文字、簡易図形、あるいは地図の形で、FMデータ多重放送、光ビーコンあるいは電波ビーコンにより提供するものである。
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記D−GPS方式に対応したナビゲーション装置で、さらに上記VICSのサービスをFMデータ多重放送により受信するものとすると、1台のFM多重チューナによってD−GPSの補正情報とVICSの交通情報とを受信しなければならない。
【0008】
そのため、上記D−GPSの補正情報とVICSの交通情報が同一の周波数のFM放送電波に多重化されている場合は問題ないが、上記D−GPSの補正情報とVICSの交通情報が異なる周波数のFM放送電波に多重化されている場合には、手動で周波数を切換えてこれら2種類の情報を得るか、あるいは2台のFM多重チューナを備えるようにしなければならない。上記前者の手動で周波数を切換える方法は操作が非常に繁雑で実用的ではなく、また上記後者の2台のFM多重チューナを備えるものは装置の大型化、高コスト化を招くことになる。
【0009】
本発明は上記のような実情に鑑みてなされたもので、その目的とするところは、1台のFM多重チューナにより受信周波数が異なる場合でもD−GPSとVICSのデータをほぼ同時に受信することが可能なナビゲーション装置及びこのナビゲーション装置に使用される記憶媒体を提供することにある。
【課題を解決するための手段】
【0010】
請求項1記載の発明は、道路情報を含む地図データが記憶された地図データ記憶手段と、受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、この測位手段で得た現在位置に基づいて上記地図データ記憶手段から地図データを読出して、表示データとして展開する地図データ展開手段と、放送電波に多重化されて送られてくるデータを受信する受信手段と、この受信手段により交通情報のデータを受信させる第1の受信制御手段と、上記受信手段により上記受信した複数の衛星から送信される信号の誤差情報のデータを受信させる第2の受信制御手段と、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た表示データを加工する加工する加工手段と、この加工手段で得た表示データを表示する表示手段とを具備したことを特徴とする。
【0011】
このような構成とすれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信し、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【0012】
請求項2記載の発明は、上記請求項1記載の発明において、上記第1及び第2の受信制御手段のうち、少なくとも一方は周波数サーチを行なうことによりデータを受信させることを特徴とする。
【0013】
このような構成とすれば、上記請求項1記載の発明の作用に加えて、受信周波数が地域や時間等によってことなり、不明である場合であっても迅速に誤差情報のデータ及び交通情報のデータの少なくとも一方をサーチすることができる。
【0014】
請求項3記載の発明は、上記請求項2記載の発明において、上記第3の受信制御手段は、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、その同一周波数で他方のデータも受信できるか否かを判断し、他方のデータが受信できないと判断した際には上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させることを特徴とする。
【0015】
このような構成とすれば、上記請求項2記載の発明の作用に加えて、必要な場合にのみ周波数サーチを行なうため、処理が簡単となる。
【0016】
請求項4記載の発明は、上記請求項1乃至3いずれかに記載の発明において、上記第3の受信制御手段は上記第1及び第2の受信制御手段により上記交通情報のデータの内容の更新周期に対応してその受信の切換タイミングを設定することを特徴とする。
【0017】
このような構成とすれば、上記請求項1乃至3いずれかに記載の発明の作用に加えて、常に最新の交通情報のデータを継続して確実に受信することができる。
【0018】
請求項5記載の発明は、上記請求項1乃至4いずれかに記載の発明において、上記第3の受信制御手段は、上記第2の受信制御手段により放送電波に多重化されて送られてくる誤差情報のデータを受信させた際、その誤差情報のデータ内容に応じた周期で周波数を変えて上記第1の受信制御手段により交通情報のデータも受信させることを特徴とする。
【0019】
このような構成とすれば、上記請求項1乃至4いずれかに記載の発明の作用に加えて、必要最小限の誤差情報のデータを受信するだけで済み、交通情報のデータの受信に対する悪影響を極力少なくすることができる。
【0020】
請求項6記載の発明は、上記請求項1乃至4いずれかに記載の発明において、上記第3の受信制御手段は、上記第2の受信制御手段による放送電波に多重化されて送られてくる誤差情報のデータの受信タイミングに合わせて当該誤差情報のデータを受信させることを特徴とする。
【0021】
このような構成とすれば、上記請求項1乃至4いずれかに記載の発明の作用に加えて、誤差情報のデータの受信タイミングが周期的で且つデータフレーム中の短い期間である際には、誤差情報のデータの受信に伴って交通情報のデータから欠落した部分をデータフレーム中の他の部分からの訂正により復元することにより、結果として1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとを同時に受信することができる。
【0022】
請求項7記載の発明は、上記請求項6記載の発明において、上記受信手段は、放送電波の選局受信を行なう2つのチューナ部、これら2つのチューナ部のいずれかで受信した放送電波に多重化されて送られてくるデータをデコードするデコーダ部、及び上記2つのチューナ部のいずれかで受信した放送電波とを切換選択して上記デコーダ部に供給するスイッチ部を有し、上記第1の受信制御手段は、上記受信手段の2つのチューナ部の一方により交通情報のデータを受信させ、上記第2の受信制御手段は、上記受信手段の2つのチューナ部の他方により誤差情報のデータを受信させ、上記第3の受信制御手段は、上記受信手段のスイッチ部を切換設定することで誤差情報のデータと交通情報のデータの受信を切換えることを特徴とする。
【0023】
このような構成とすれば、上記請求項6記載の発明の作用に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を短縮し、交通情報のデータの受信で欠落する部分を減少させることができるため、交通情報のデータの復元が容易となり、ほぼ確実に交通情報のデータを得ることができるようになる。
【0024】
請求項8記載の発明は、上記請求項7記載の発明において、上記受信手段のデコーダ部は、上記他方のチューナ部で受信する誤差情報のデータが多重化された放送電波を遅延して入力する遅延回路をさらに有することを特徴とする。
【0025】
このような構成とすれば、上記請求項7記載の発明の作用に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を必要最小限に短縮し、交通情報のデータの受信で欠落する部分を大幅に減少させることができるため、交通情報のデータの復元がきわめて容易となり、確実に交通情報のデータを得ることができるようになる。
【0026】
請求項9記載の発明は、複数の衛星から送信される信号を受信する第1の受信手段と放送電波に多重化されて送られてくる交通情報のデータ及び上記複数の衛星から送信される信号の誤差情報のデータを受信する第2の受信手段とを有するナビゲーション装置のためのプログラムを記憶した記憶媒体であって、上記第2の受信手段により上記交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、第2の受信手段により周波数を変えて該他方のデータを受信させるプログラムを記憶したことを特徴とする。
【0027】
このような記憶内容とすれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信させ、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【発明の効果】
【0028】
請求項1記載の発明によれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信し、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【0029】
請求項2記載の発明によれば、上記請求項1記載の発明の効果に加えて、受信周波数が地域や時間等によってことなり、不明である場合であっても迅速に誤差情報のデータ及び交通情報のデータの少なくとも一方をサーチすることができる。
【0030】
請求項3記載の発明によれば、上記請求項2記載の発明の効果に加えて、必要な場合にのみ周波数サーチを行なうため、処理が簡単となる。
【0031】
請求項4記載の発明によれば、上記請求項1乃至3いずれかに記載の発明の効果に加えて、常に最新の交通情報のデータを継続して確実に受信することができる。
【0032】
請求項5記載の発明によれば、上記請求項1乃至4いずれかに記載の発明の効果に加えて、必要最小限の誤差情報のデータを受信するだけで済み、交通情報のデータの受信に対する悪影響を極力少なくすることができる。
【0033】
請求項6記載の発明によれば、上記請求項1乃至4いずれかに記載の発明の効果に加えて、誤差情報のデータの受信タイミングが周期的で且つデータフレーム中の短い期間である際には、誤差情報のデータの受信に伴って交通情報のデータから欠落した部分をデータフレーム中の他の部分からの訂正により復元することにより、結果として1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとを同時に受信することができる。
【0034】
請求項7記載の発明によれば、上記請求項6記載の発明の効果に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を短縮し、交通情報のデータの受信で欠落する部分を減少させることができるため、交通情報のデータの復元が容易となり、ほぼ確実に交通情報のデータを得ることができるようになる。
【0035】
請求項8記載の発明によれば、上記請求項7記載の発明の効果に加えて、誤差情報のデータと交通情報のデータの受信の切換えに要する時間を必要最小限に短縮し、交通情報のデータの受信で欠落する部分を大幅に減少させることができるため、交通情報のデータの復元がきわめて容易となり、確実に交通情報のデータを得ることができるようになる。
【0036】
請求項9記載の発明によれば、1台の多重ラジオチューナにより受信周波数が異なる場合でも誤差情報のデータと交通情報のデータとをほぼ同時に受信させ、正確な現在位置を含む周辺の地図上に交通情報を反映したものとして表示させることができる。
【発明を実施するための最良の形態】
【0037】
(第1の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第1の実施の形態について図面を参照して説明する。
【0038】
図1は本装置全体の回路構成を示すもので、GPS受信機能として車体のルーフ上に設置されたGPSアンテナ1と、このGPSアンテナ1が受信した複数のGPS衛星からのL1帯(1.57542GHz)のC/Aコードデータを逆拡散LSIにより復調、解読して現在地の緯度、経度、高さ、時刻等を割出すGPSブロック2とを有している。
【0039】
GPSブロック2はグラフィックブロック3に接続されており、このグラフィックブロック3には、他にもFMアンテナ4、後述するモードキーやカーソルキー等各種入力キーを有するキーブロック5、道路情報及び地名情報を含んだ地図データと動作プログラムとを記録した記録媒体であるCD−ROMが装着されたCDブロック6、例えばカラーLCDパネル及びその駆動回路で構成される表示装置を有するモニタブロック7がそれぞれ接続されている。
【0040】
グラフィックブロック3には、上記CDブロック6のCD−ROMから読出されてフラッシュEEPROM11に格納された動作プログラム及びRAM12に記憶された種々データに基づいて装置全体を制御するCPU13が設けられている。
【0041】
また、グラフィックブロック3内では、上記FMアンテナ4で受信したFM電波を復調して所望の放送局のFM復調信号を得るFMチューナ14、このFMチューナ14に接続されて上記FM復調信号に多重されているデータをデコードするFM多重デコーダ15、主として上記GPSブロック2、キーブロック5及びCDブロック6と上記CPU13との間のデータの入出力制御を行なうCPU周辺回路ゲートアレイ(G/A)16、及びグラフィックコントローラ17が上記フラッシュEEPROM11、RAM12及びCPU13と共にバス接続して設けられ、さらにグラフィックコントローラ17にはビデオRAM18が接続される。
【0042】
CPU13は、道路走行時において、上記GPSブロック2から現在地の緯度、経度のデータすなわち位置データが他の高さ、時刻等を表わすデータと共に送られてくると、FM多重デコーダ15でデコードされたFMデータ多重放送のD−GPSに基づく誤差情報のデータによりこれを補正し、補正した位置データによりCPU周辺回路G/A16を介して現在地周辺の地図データをCDブロック6から呼出し、表示データとしてビデオRAM18が接続されたグラフィックコントローラ17に送出する一方、同じくFM多重デコーダ15でデコードされたFMデータ多重放送のVICSに基づく交通情報を必要に応じて読出し、これを展開して上記グラフィックコントローラ17に送出してビデオRAM18の表示データに重畳させる。
【0043】
グラフィックコントローラ17では、CPU13から送られてきた交通情報を重畳した地図データをビデオRAM18上に展開して1画面毎の表示データを作成し、作成した表示データを上記モニタブロック7に送出して交通情報及び地図を表示させる。
【0044】
図2は上記キーブロック5を主として構成するリモコンユニット20の外観構成を示すもので、図2(a)が左側面図、図2(b)が上面図である。
【0045】
リモコンユニット20は、リモコン本体ケース21がケーブルにより接続されたワイヤードリモートコントローラであり、図2(a)に示すようにリモコン本体ケース21の左側面にスライドスイッチにより電源のオン/オフを行なう電源スイッチ22が設けられる。
【0046】
また、図2(b)に示すようにリモコン本体ケース21の上面には、電源LED23、NAVI/CDキー24、TVキー25、FM DATAキー26、MENUキー27、カーソルキー28、ENTERキー29、ポジションキー(図では「POS」と示す)30、縮尺変更/チューニングキー31、MARKキー32、POINTキー33、HOMEキー34及びVIDEOキー35を備える。
【0047】
電源LED23は、上記電源スイッチ22で電源がオンとされた際に赤色で点灯する。
【0048】
NAVI/CDキー24は、本装置でナビゲーション動作を行なう場合あるいは本実施の形態では説明を省略するがCDブロック6に音楽用のCDを装着して音楽鑑賞を行なう場合に操作するキーである。
【0049】
TVキー25は、本実施の形態では説明を省略するがグラフィックブロック3に図示しないテレビチューナを接続して上記モニタブロック7にてテレビ鑑賞を行なう場合に操作するキーであり、FM DATAキー26は、FM多重デコーダ15から得られるFMデータ多重放送の文字情報を上記モニタブロック7にて表示させる場合に操作するキーである。
【0050】
MENUキー27はメニュー画面の表示を指示するキー、カーソルキー28はメニュー画面等でモニタブロック7の表示画面上に表示されるカーソルの上下左右各方向への移動を指示するリング状のキー、ENTERキー29は上記カーソルキー28の移動により表示画面上のカーソルで指し示されるアイコン等を操作指示するためのキーである。
【0051】
また、ポジションキー30は上記アンテナ1及びGPSブロック2により割出された現在地の緯度、経度等を表示させるためのキー、縮尺変更/チューニングキー31はナビゲーション動作時に表示される地図の縮尺の変更指示を行なう一方、テレビあるいはラジオ受信動作時にアップ/ダウンチューニングを指示するキーである。
【0052】
さらに、MARKキー32は地図データの任意位置に経路誘導機能での通過位置等をマーキングするためのキー、POINTキー33は経路誘導機能の動作時に目的地の設定及び目的地側への画面スクロール等を指示するキー、HOMEキー34は同じく経路誘導機能の動作時に現在地の設定及び現在地側への画面スクロール等を指示するキーである。
【0053】
そして、VIDEOキー35は本実施の形態では説明を省略するがグラフィックブロック3に図示しないビデオカメラ等を接続して上記モニタブロック7にてビデオ鑑賞を行なう場合に操作するキーである。
【0054】
次に上記第1の実施の形態の動作について説明する。
【0055】
図3乃至図7はD−GPSとVICSそれぞれの設定状態を示すものである。すなわち、現在位置を含む地図を表示するナビゲーション動作の実行時にリモコンユニット20のMENUキー27を押下操作すると、図3に示すようにメニュー画面をモニタブロック7で表示する。ここで、図3に示す如く「D−GPS/VICS設定」の項目をカーソルキー28の操作により指定した状態でENTERキー29を操作すると、図4に示すようにサブメニュー画面を表示する。
【0056】
この図4のサブメニュー画面においては、D−GPSとVICSの双方の機能をオンさせるための「D−GPS/VICS ON」と、D−GPSの機能のみをオンさせるための「D−GPS ON」と、VICSの機能のみをオンさせるための「VICS ON」とが表示されるもので、そのうち先頭の「D−GPS/VICS ON」が反転表示される。
【0057】
しかして、この図4に示した「D−GPS/VICS ON」が反転表示された状態からENTERキー29を操作すると、図5に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されていることを第1のシンボルS1で、またVICSの機能がオン設定されており、その交通情報のデータが例えば「82.5[MHz]」の周波数の放送電波に多重化されていて最新の情報が時刻「14:25」の時点のものであることを第2のシンボルS2でそれぞれ地図の方位を表わす方位記号Dと共に表示する一方、地図中ではVICS機能により得られた交通情報を基に、混雑している道路区間と比較的空いている道路区間とを例えば図示する如く色の異なる矢印を付加することで表示する。
【0058】
また、上記図4に示したサブメニュー画面の表示状態からカーソルキー28を操作して「D−GPS ON」が反転表示された状態でENTERキー29を操作すると、図6に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されていることを第1のシンボルS1で地図の方位を表わす方位記号Dと共に表示する。
【0059】
さらに、上記図4に示したサブメニュー画面の表示状態からカーソルキー28を操作して「VICS ON」が反転表示された状態でENTERキー29を操作すると、図7に示すようにモニタブロック7での現在位置記号Pを含む地図の画面左端に、VICSの機能がオン設定されており、その交通情報のデータが例えば「82.5[MHz]」の周波数の放送電波に多重化されていて最新の情報が時刻「14:25」の時点のものであることを第2のシンボルS2で地図の方位を表わす方位記号Dと共に表示する一方、地図中ではVICS機能により得られた交通情報を基に、混雑している道路区間と比較的空いている道路区間とを例えば図示する如く色の異なる矢印を付加することで表示する。
【0060】
図8は、CPU13がGPSブロック2から位置データを取得すると同時に、上記図5で示したようにD−GPSの機能とVICSの機能を共にオンに設定した場合にFM多重デコーダ15から現在位置に関する誤差情報のデータと交通情報のデータとを取得する際の処理手順を示すもので、その当初にはVICSによる交通情報のデータのサーチを開始し(ステップA01)、併せてRAM12に設定する第1のタイマによる計時をスタートさせる(ステップA02)。
【0061】
ここで、VICSによる交通情報のデータのサーチは、FMチューナ14によるFMラジオ放送の周波数帯域、例えば76.0[MHz]から90.0[MHz]までをオートチューニング機能により0.1[MHz]ステップで順次受信し、放送電波があってサーチがストップした場合にはデータ多重放送がなされているか否かを判断し、且つデータ多重放送がなされている場合にはそれを1フレーム分受信してみてそれらの番組の中にVICSによるものがあるか否かを判断するもので(ステップA03)、上記RAM12の第1のタイマは、VICSサービスにおける交通情報の更新周期、例えば「5分」を計時するためのものである。
【0062】
ここで、VICSサービスにおける交通情報の更新周期は「5分」としたが、これは正確には「2分30秒」を単位とする交通情報を2回繰返して提供されるものとする。
【0063】
しかして、上記ステップA03により当該周波数で放送電波がないか、あるいはあってもデータ多重放送がなされていないか、あるいはデータ多重放送がなされていてもそれらの番組の中にVICSによるものがないと判断した場合には、次いでサーチを1周したか否か、すなわち同周波数帯域の最後の周波数90.0[MHz]にあっても同VICSによるものがなかったか否か判断する(ステップA04)。
【0064】
しかるに、このステップA04でサーチが1周していないと判断した場合には、さらに受信する周波数を0.1[MHz]だけプラスして上記ステップA03からの動作を繰返し実行する。
【0065】
そして、ステップA03で放送電波があって且つデータ多重放送がなされており、なおかつそれらの番組の中にVICSによるものがあると判断した時点で、RAM12に設定する上記交通情報の単位「2分30秒」を計時する第2のタイマの計時をスタートさせた後(ステップA05)、当該周波数で受信したVICSの交通情報を一旦RAM12に格納する(ステップA06)。
【0066】
その後、上記RAM12の第2のタイマの計時値が上述した限度値「2分30秒」となったか否か判断し(ステップA07)、なっていないと判断した場合には再度上記ステップA06に戻って受信したVICSの交通情報のデータをRAM12へ格納する、という処理を繰返し実行する。
【0067】
そして、ステップA07で上記RAM12の第2のタイマの計時値が上述した限度値「2分30秒」となったと判断した時点で、VICSの交通情報のデータを一通り受信し終えたこととなるので、次いでFMチューナ14による受信周波数を変えずに、このVICSの交通情報のデータを受信した同一周波数でD−GPSによる誤差情報のデータを受信することができるか否かを判断する(ステップA08)。
【0068】
このD−GPSによる誤差情報のデータは、データ多重放送のデータ1フレーム中の予め定められたパケット位置、例えば第1及び第2パケットに挿入されているもので、1フレームすべてを受信する必要はなく、上記予め定められたパケット位置にあるか否かにより判断を行なうことができる。
【0069】
しかるに、ステップA08で当該パケット位置にD−GPSによる誤差情報のデータがなく、VICSの交通情報のデータを受信したのと同一の周波数ではD−GPSによる誤差情報のデータを受信することができないと判断すると、次いで今度は同じくD−GPSによる誤差情報のデータのサーチを開始する(ステップA09)。
【0070】
ここで、D−GPSによる誤差情報のデータのサーチは、再びFMチューナ14によるFMラジオ放送の周波数帯域、例えば76.0[MHz]から90.0[MHz]までをオートチューニング機能により0.1[MHz]ステップで順次受信し、放送電波があってサーチがストップした場合にはデータ多重放送がなされているか否かを判断し、且つデータ多重放送がなされている場合にはそのフレーム中の特定パケット位置にD−GPSによるものがあるか否かを判断するもので(ステップA10)、当該周波数で放送電波がないか、あるいはあってもデータ多重放送がなされていないか、あるいはデータ多重放送がなされていてもそれらの番組の中にD−GPSによるものがないと判断した場合には、次いでサーチを1周したか否か、すなわち同周波数帯域の最後の周波数90.0[MHz]にあっても同D−GPSによるものがなかったか否か判断する(ステップA11)。
【0071】
しかるに、このステップA11でサーチが1周していないと判断した場合には、さらに受信する周波数を0.1[MHz]だけプラスして上記ステップA10からの動作を繰返し実行する。
【0072】
そして、ステップA10で放送電波があって且つデータ多重放送がなされており、なおかつそれらの番組の中にD−GPSによるものがあると判断した時点で、当該周波数で受信したD−GPSの誤差情報のデータを一旦RAM12に収集する(ステップA12)。
【0073】
その後、上記RAM12の第1のタイマの計時値が上述した限度値「5分」となったか否か判断し(ステップA13)、なっていないと判断した場合には再度上記ステップA12に戻って受信したD−GPSの誤差情報のデータをRAM12へ収集する、という処理を繰返し実行する。
【0074】
そして、ステップA13で上記RAM12の第1のタイマの計時値が上述した限度値「5分」となったと判断した時点で、更新されたVICSによる交通情報のデータを受信するべく、再び上記ステップA01に戻る。
【0075】
なお、上記ステップA04でVICSによる交通情報のデータが受信されないままにサーチが1周したと判断した場合には、該データを受信することができなかったものとして、そのまま上記ステップA09に進み、今度はD−GPSによる誤差情報のデータの受信のサーチに遷移する。
【0076】
また、上記ステップA08でVICSによる交通情報のデータを受信した周波数と同一周波数でD−GPSによる誤差情報のデータも受信することができると判断した場合には、上記ステップA09〜ステップA11によるサーチ動作を行なう必要がないので、そのままステップA12に遷移してその受信周波数において受信したD−GPSによる誤差信号のデータをRAM12に収集する。
【0077】
さらに、上記ステップA11でD−GPSによる誤差情報のデータが受信されないままにサーチが1周したと判断した場合には、該データを受信することができなかったものとして、そのまま上記ステップA01に戻り、再びVICSによる交通情報のデータの受信のサーチを行なう。
【0078】
上記のようにしてRAM12に格納したD−GPSによる誤差情報のデータに基づいてGPSブロック2から得た現在位置のデータを補正した上でCDブロック6から読出した地図データの展開を行ない、さらに展開した地図データ上にRAM12に格納したVICSによる交通情報のデータを重畳して表示させることで上記図5に示すような画面を得ることができるようになるものである。
【0079】
なお、上記VICSによる交通情報のデータは、実際には「レベル1」〜「レベル3」の3種類があり、上述したように地図データに直接重畳するものとして「レベル3」のものを用いる場合を例にとって示したが、地図データの一部にウィンドウを設けて「レベル1」による文字または「レベル2」による簡易図形のものを重畳表示するようにしてもよいものとする。
【0080】
また、上記図6で示したようにD−GPSの機能のみをオンとするよう設定した場合には、上記ステップA01〜A08の処理は省略してステップA09〜A13の処理(タイマー処理を除く)のみを実行する。
【0081】
反対に、上記図7で示したようにVICSの機能のみをオンとするよう設定した場合には、上記ステップA08〜A13の処理は省略してステップA01〜A07の処理(タイマー処理を除く)のみを実行する。
【0082】
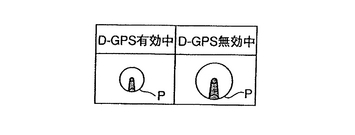
また、上記実施の形態では、D−GPSの機能のオン/オフ時に際してモニタブロック7の表示画面では第2のシンボルS2の有無により判断する他なかったが、図9に示すようにD−GPSの機能のオン/オフ時によって地図データ中に表示する現在位置記号Pの大きさを可変設定するようにしてもよい。
【0083】
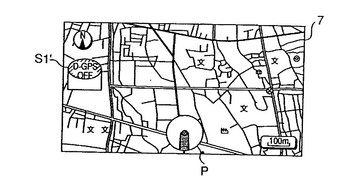
図10はD−GPSの機能をオフとして設定した場合、あるいはオンとして設定しながらもサーチの結果D−GPSによる誤差情報が得られなかった場合でのモニタブロック7の表示画面を例示するもので、画面左端に、D−GPSの機能がオフとなっていることを第1のシンボルS1′を表示すると共に、現在位置の誤差が最大100[m]程度であるため、上記図9でも示したように径の大きな現在位置記号Pを地図データ中に表示させている。
【0084】
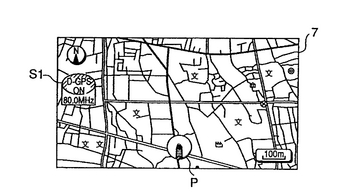
これに対して、図11はD−GPSの機能をオンに設定し、且つ実際にFM多重デコーダ15よりD−GPSのデータを受信している場合でのモニタブロック7の表示画面を例示するもので、画面左端に、D−GPSの機能がオン設定されており、その誤差情報のデータが例えば「80.0[MHz]」の周波数の放送電波に多重化されて受信されていることを第1のシンボルS1で表示すると共に、現在位置の誤差がD−GPS機能オフ時の1/10程度に補正されているため、上記図9でも示したように径の小さな現在位置記号Pを地図データ中に表示させている。
【0085】
なお、上記図10におけるD−GPS機能オフ時の第1のシンボルS1′と図11におけるD−GPS機能オン時の第1のシンボルS1では、例えばD−GPS機能オフ時の第1のシンボルS1′をグレー、D−GPS機能オン時の第1のシンボルS1を緑というように色を異ならせて表示することで、より明確に視認可能となるものである。
【0086】
また、図8のフローチャートにおいて、D−GPSのサーチ監視を、VICS受信周波数から始めるようにしてもよい。さらに、VICS及びD−GPSの各受信周波数を一度サーチし、受信した後は、サーチを行なわずにその周波数情報に基づいてチューニングを制御するようにしてもよい。
【0087】
(第2の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第2の実施の形態について図面を参照して説明する。
【0088】
なお、本装置全体の回路構成は上記図1に、リモコンユニットの外観構成は上記図2に示したものとそれぞれ基本的に同様であるものとして、同一部分には同一符号を付してその説明は省略する。
【0089】
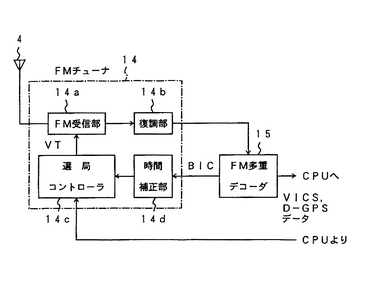
図12は上記FMチューナ14を中心とした回路構成を示すもので、図示する如くFMチューナ14はFM受信部14a、復調部14b、選局コントローラ14c、及び時間補正部14dから構成される。
【0090】
FM受信部14aは、FMアンテナ4で受信された電波中から選局コントローラ14cから入力されるチューニング電圧VTに対応した周波数を選局し、中間周波数信号に変換して復調部14bへ出力する。復調部14bでは、この中間周波信号に対してFM復調等の処理を行なうことでFM復調信号を得、得たFM復調信号をFM多重デコーダ15へ送出する。
【0091】
FM多重デコーダ15は、FM音声信号に多重化されているデータをデコードして得たVICSやD−GPSのデータ等を上記CPU13へ出力する一方、D−GPSデータ中の各ブロックの先頭位置にブロック同期及びフレーム同期を確立するために付加されているBIC(Block Identification Code:ブロック識別符号)信号を検出して上記FMチューナ14の時間補正部14dに送出する。
【0092】
時間補正部14dでは、FM多重デコーダ15からのBIC信号を読取り、そのタイミングに応じて選局コントローラ14cによる選局動作の切換えタイミングを補正する。選局コントローラ14cは、CPU13からの指示に基づき、選局動作時に内部のクロックのカウントによってチューニング電圧VTを発生して上記FM受信部14aへ出力するもので、その切換タイミングは上記時間補正部14dからの信号により補正される。
【0093】
いま図13(1)に示すように周波数82.5[MHz]のFM放送電波にVICSのデータが多重化されて送られてきている一方、図13(2)に示すように周波数80.0[MHz]のFM放送電波にD−GPSのデータが多重化されて送られてきているものとする。
【0094】
80.0[MHz]のD−GPSのデータGは、図示する如く各フレームの先頭2パケット(ブロック)に予め位置が固定されている。また、周波数間でのフレーム同期はとられていないので、周波数80.0[MHz]の多重化データのフレームと82.5[MHz]の多重化データのフレームは受信タイミングにずれを生じている。
【0095】
FM放送に多重化されるデータは、1フレーム当たり5(秒)で伝送される272ブロックのパケットを有し、そのうち先頭の2つのデータパケットが上述した如くD−GPSの伝送パケットとして割当てられる。
【0096】
図14は上記2パケットに割当てられたD−GPS用のデータの内容を示す図である。すなわち、D−GPS用データとしては、そのデータ識別番号(データID),補正値データの作成時刻(Time of Correction)に続いて、例えば第1番目乃至第8番目の8つのGPS衛星からの受信信号に基づき得られた各衛星に対応する補正データセット、及び各衛星それぞれの正常/異常を示すコミュニケーションデータ(Communication Data)が与えられる。
【0097】
図15は上記D−GPS用データとして与えられた各衛星の補正データセットの内容を示す図である。すなわち、例えば衛星1〜衛星8のそれぞれに対応する補正データセットとしては、疑似距離補正値(PRC)のスケールファクタ(Scale Factor:SF)、ユーザ・ディファレンシャル距離誤差指数(User Differential Range Error:UDER)、衛星識別番号(Satellite ID:St.ID)、疑似距離の補正値(Pseudorange Correction:PRC)、該疑似距離補正値(PRC)の1秒当りの変化率である距離変化率の補正値(Range Rate Correction:RRC)、及び衛星の軌道データを示すデータ発行番号(Issue Of Data:IODE)が与えられる。
【0098】
次いで、動作時の具体的な処理内容について図16により説明する。
【0099】
なお、この処理を開始する前処理として、D−GPSデータが受信記憶されており、D−GPSデータを送っている周波数80.0[MHz]の多重化データに対するフレーム同期及びブロック同期が確立されているものとする。
【0100】
その処理当初には、VICSのデータを受信するべくCPU13がFMチューナ14の選局コントローラ14cにVICSのデータを多重化しているFM放送の周波数の選局を指示する制御信号を送出することにより、選局コントローラ14cが当該周波数、例えば上記図13(1)で示した82.5[MHz]に対応したチューニング電圧VTを発生してFM受信部14aへ送出し、当該周波数の放送を選局させる(ステップB01)。
【0101】
FM受信部14aがこのチューニング電圧VTに従って82.5[MHz]の放送電波を選局、受信し、復調部14bからFM復調信号を出力すると、FM多重デコーダ15はこのFM復調信号に多重化されているデータをデコードし、BICを時間補正部14dへ出力する一方、VICSのデータをCPU13へ出力する(ステップB02)。
【0102】
ここでCPU13は、すでに受信してRAM12に保持していた、D−GPSのデータ中の上記図15で示したRRCを読出し、その値が予め設定されている値、例えば0.1[m/秒]を越えているか否かを判断するもので(ステップB03)、0.1[m/秒]を越えておらず、各GPS衛星からの信号により得た現在位置のデータが比較的正確であると判断した場合には、次いでこのVICSのデータを受信してから12フレーム期間(1分間)だけ経過したか否か判断し(ステップB04)、経過していない場合には再び上記ステップB02に戻ってVICSのデータの受信を続行する。
【0103】
また、上記ステップB03でRAM12に保持していたRRCの値が予め設定されている値、例えば0.1[m/秒]を越えていると判断した場合には、各GPS衛星からの信号により得た現在位置のデータが比較的誤差を多く含んでいるものとして、次いでこのVICSのデータを受信してから6フレーム期間(30秒間)だけ経過したか否か判断し(ステップB05)、経過していない場合には再び上記ステップB02に戻ってVICSのデータの受信を続行する。
【0104】
このようにRRCの値に応じた複数フレーム期間だけVICSのデータを連続して受信し、その期間が終了したと判断した時点(80.0[MHz]の多重化データのフレーム開始タイミング)で(ステップB04,B05)、次いでCPU13はFMチューナ14の選局コントローラ14cに対してD−GPSのデータを多重化しているFM放送の周波数の選局を指示する制御信号を送出することにより、選局コントローラ14cが当該周波数、例えば上記図13(2)で示した80.0[MHz]に対応したチューニング電圧VTを発生してFM受信部14aへ送出し、当該周波数の放送を選局させる(ステップB06)。
【0105】
選局後、フレームの開始タイミングで選局コントローラ14cは、D−GPSのデータの受信時間(2ブロック)を計時するための内部タイマ(図では「タイマ3」と示す)の動作をスタートさせるもので(ステップB07)、その後、FM受信部14aがこのチューニング電圧VTに従って80.0[MHz]の放送電波を受信し、復調部14bからFM復調信号を出力すると、FM多重デコーダ15はこのFM復調信号に多重化されているデータをデコードし、BICを時間補正部14dへ出力する一方、得たD−GPSのデータをCPU13へ出力する(ステップB08)。
【0106】
このとき時間補正部14dでは、FM多重デコーダ15から順次送られてくるBICのビットパターンの変化により80.0[MHz]の多重化データのブロックの先頭位置となったタイミングを検出して上記選局コントローラ14cの内部タイマ(上記タイマ3とフレームタイマ)を補正するもので、その後、この選局コントローラ14cのタイマ3の計時により上記2パケット期間分だけ経過したか否か判断し(ステップB09)、経過していない場合には再び上記ステップB08に戻ってD−GPSのデータの受信を続行する。
【0107】
そして、選局コントローラ14cのタイマ3の計時により2パケット期間分だけ経過したと判断した時点で、受信したD−GPSのデータにより後述するディファレンシャル補正値生成その他の処理を実行すると共に、再び上記ステップB01に戻ってVICSのデータの受信処理に復帰する。
【0108】
しかるに、上記D−GPSのデータを2パケット分受信した毎にCPU13は、同時に以下に示すディファレンシャル補正値生成処理を実行するものである。
【0109】
図17はその処理内容を示すもので、CPU13はFM多重デコーダ15に受信されているD−GPSのデータの更新を随時待機し(ステップC01)、更新がなされたと判断した時点でGPSブロック2から現在の衛星受信時刻を読込む(ステップC02)。
【0110】
CPU13は、前記GPSブロック2から読込んだ衛星受信時刻と、FM多重デコーダ15からのD−GPSのデータに含まれる疑似距離補正値PRC、距離変化率補正値RRCの補正値作成時刻との差に基づき、PRC,RRCに対する演算処理を実行し、GPSブロック2における現在の衛星受信時刻に合わせた疑似距離補正値PRCを算出し(ステップC03)、その後に再び上記ステップC01に戻る、という動作を繰返し実行するものである。
【0111】
こうして求めた現在の衛星受信時刻に合わせた疑似距離補正値PRCは、その距離変化率補正値RRCと共にGPSブロック2に送出されるもので、距離変化率補正値RRCはさらに上述した如くその値の内容によってVICSのデータを連続して受信するフレーム期間の基準とするようになる。
【0112】
このように、距離変化率補正値RRCを用いてGPSブロック2より得られる現在位置のデータに補正が必要と思われる度合いに応じた頻度で該補正処理を行ないながら同時にFMチューナ14で受信周波数を切換えてVICSのデータもでき得る限り連続して受信するようにしたので、D−GPSのデータを多重化している放送電波とVICSのデータを多重化している放送電波とで周波数が異なっていたとしても、これを自動的に適切に切換え、現在位置を常に正確に認識した上で必要な交通情報をより多く連続して受信することができる。
【0113】
(第3の実施の形態)
以下本発明をGPS及びFMデータ多重放送を利用した自動車用ナビゲーション装置に適用した場合の第3の実施の形態について図面を参照して説明する。
【0114】
なお、本装置全体の回路構成は上記図1に、リモコンユニットの外観構成は上記図2に示したものとそれぞれ基本的に同様であるものとして、同一部分には同一符号を付してその説明は省略する。
【0115】
図18は主として上記FM多重デコーダ15の詳細な回路構成を示すもので、図示する如くFM多重デコーダ15はフィルタ15a、PLL検波部15b、同期検出部15c、信号処理部15d、D−GPS検出部15e、及びタイマ15fから構成される。
【0116】
フィルタ15aは、FMアンテナ4で受信され、FMチューナ14で電波中から選局して得たFM復調信号中からデジタルデータが多重されている副搬送波周波数の76KHz帯域のみを抽出するもので、その出力はPLL検波部15bに送られる。
【0117】
PLL検波部15bは、フィルタ15aの出力に対してL−MSK方式に基づいた、ステレオ音声信号の変調度に応じた遅延検波を行なってデジタルデータを復調した後に、そのビット同期をとることでデジタルPLLをかけて該デジタルデータに同期したクロックを再生し、復調したデジタルデータを同期検出部15c及び信号処理部15dへ、再生したクロックを同期検出部15cへそれぞれ送出する。
【0118】
同期検出部15cは、デジタルデータを再生されたクロックでサンプリングしてデータ中の各ブロック(パケット)の先頭に付されているBICを検出することによりデータ中のブロックに同期したブロック同期信号を作成し、またBICの種類の変化点を検出することによりフレーム同期信号を作成するもので、作成したブロック同期信号及びフレーム同期信号を信号処理部15dへ出力する。
【0119】
信号処理部15dは、CPU13の制御の下に、PLL検波部15bから送られてくるデジタルデータに対し、同期検出部15cから送られてくるブロック同期信号及びフレーム同期信号に基づいてスクランブルを解除し、誤り訂正及びデータ中のCRC(Cyclic Redundancy Code:循環冗長符号)のチェックを行なった後に、FM多重デコーダ15外のCPU13へ出力する一方、D−GPS検出部15eへも出力する。
【0120】
D−GPS検出部15eは、データ多重放送のデータ1フレーム中の第1及び第2パケットに挿入されているD−GPSによる誤差情報のデータの有無を検出し、検出した時点でタイマ15fへのリセット信号の送出を開始し、その受信を終えた時点で送出を停止する。
【0121】
タイマ15fは、FM多重デコーダ15からのリセット信号によりリセットされた後に、予め設定された時間を計時するもので、タイムアップした時点、すなわち上記予め設定された時間を計時し終えた時点から次にリセット信号が入力されるまでの時点の間、オンとなるような受信周波数切換信号SW−PLLを上記CPU13へ送出する。
【0122】
CPU13は、タイマ15fからの受信周波数切換信号SW−PLLにも対応してFMチューナ14で選局するFM放送電波の周波数を制御させる一方、信号処理部15dから得られる訂正済みのデジタルデータに基づいた処理を実行する。
【0123】
次いで上記第3の実施の形態の動作について説明する。
【0124】
いま周波数82.5[MHz]のFM放送電波にVICSのデータが多重化されて送られてきている一方、周波数80.0[MHz]のFM放送電波にD−GPSのデータが多重化されて送られてきているものとする。
【0125】
80.0[MHz]のD−GPSの誤差情報のデータは、図19に示す如く272ブロックのパケットからなる各フレームの先頭2パケット(ブロック)に予め位置が固定されている。また、周波数間でのフレーム同期はとられていないので、周波数80.0[MHz]の多重化データのフレームと82.5[MHz]の多重化データのフレームは受信タイミングにずれを生じている。
【0126】
CPU13はまずFMチューナ14により受信周波数をサーチさせ、周波数80.0[MHz]のFM放送電波にD−GPSの誤差情報のデータが多重化されていること、及び周波数82.5[MHz]のFM放送電波にVICSの交通情報のデータが多重化されていることを認識したものとする。
【0127】
その後、CPU13はFMチューナ14によりまず周波数82.5[MHz]のFM放送電波を受信させ、FM放送電波に多重化されているデジタルデータの毎フレームの先頭2パケットで得られるD−GPSの誤差情報のデータの検出をD−GPS検出部15eにより行なわせる。
【0128】
D−GPS検出部15eがD−GPSの誤差情報のデータを検出した時点からその受信を終えるまでタイマ15fにリセット信号を送出すると、タイマ15fはこのリセット信号にリセットされて計時を開始すると共にCPU13への受信周波数切換信号SW−PLLを“L”レベルとする。このとき、CPU13は同時に信号処理部15dから得られるD−GPSの誤差情報のデータをラッチしておく。
【0129】
CPU13では、タイマ15fからの受信周波数切換信号SW−PLLが“L”レベルとなるのに対応してFMチューナ14で周波数82.5[MHz]のFM放送電波を受信するように切換させ、そのFM放送電波に多重化されているVICSの交通情報のデータの受信を開始させるもので、以後、タイマ15fからの受信周波数切換信号SW−PLLが“H”レベルとなるまで、すなわち再び次のD−GPSの誤差情報のデータを受信するべく受信周波数を80.0[MHz]に切換えるまでの間、VICSの交通情報のデータの受信を続行する。
【0130】
図20はD−GPSの誤差情報のデータを受信している期間を中心とした上記各部での動作を示すもので、図20(1)が受信周波数80.0[MHz]のFM放送電波に多重化されているD−GPSの誤差情報のデータ、図20(2)が周波数82.5[MHz]のFM放送電波に多重化されているVICSの交通情報のデータを示し、図中の数値がデータパケットの番号、ハッチングで示す部分が受信における欠落したデータ部分を表わす。
【0131】
通常、受信周波数の切換えに際して、PLLがロックし、多重化されているデジタルデータをデコードして安定して得ることが可能となるまでの時間は10〜20[msec]であるが、選局する2局の間の周波数の差が大きいほどさらに時間を要し、回路のハードウェア構成によっても左右されるので、ここでは最も余裕を持って充分安定するまでに60[msec]を要するものとしてある。因みに、デジタルデータは1フレームを5秒かけて受信するため、1パケット(ブロック)(=34バイト)当りに要する時間は18[msec]となる。
【0132】
したがって、タイマ15fには、上記D−GPS検出部15eからのリセット信号によりリセットされてから、次にデータパケット1のD−GPSの誤差情報のデータが受信される60[msec]前の時点までの間を計時するように予めその計時値が設定されるものとする。
【0133】
しかして、データパケット1のD−GPSの誤差情報のデータが受信される60[msec]前の時点となり、図20(6)に示すようにタイマ15fがタイムアップしてその出力する受信周波数切換信号SW−PLLが“H”となると、CPU13は上述したようにそれまでのVICSによる交通情報のデータの受信からD−GPSによる誤差情報のデータの受信に切換えるべくFMチューナ14での受信周波数を制御する。
【0134】
図20(3)はこのVICSによる交通情報のデータまたはD−GPSによる誤差情報のデータの受信に伴って得られるデジタルデータのBICクロックの状態を示すもので、直線の矢印が安定して受信できている状態、波線の矢印が不安定な状態を示す。
【0135】
周波数80.0[MHz]のFM放送電波の受信に切換えた後、同図(3)中にIで示すように動作が安定した状態で、実際にデータパケット1及び2のD−GPSの誤差情報のデータを受信する。
【0136】
データパケット1のD−GPSの誤差情報のデータが受信され、信号処理部15dで訂正等の処理が施された後に図20(4)に示すようにD−GPS検出部15eで検出されると、図20(5)に示すようにD−GPS検出部15eからタイマ15fへkリセット信号の送出が開始される。
【0137】
タイマ15fでは、データパケット2のD−GPSによる誤差情報のデータの受信をちょうど終える、このリセット信号の立下がりのタイミングで、計時内容をリセットして再度計時を開始すると共に、CPU13への受信周波数切換信号SW−PLLを再び“L”レベルとし、FMチューナ14での受信周波数を再度82.5[MHz]に切換えさせて、VICSの交通情報のデータを受信させる。
【0138】
この切換えから60[msec]経過し、同図(3)中にIIで示すように動作が安定すると、実際にVICSによる交通情報のデータを受信できるようになる。
【0139】
ここで、VICSによる交通情報のデータについて考えると、D−GPSによる誤差情報のデータ受信のために受信周波数を切換えてから実際に動作が安定して該データを受信し、その後再びVICSによる交通情報のデータ受信のために受信周波数を切換えて動作が安定するまでの間に、図20(2)に示すように12パケット(ブロック)が欠落することになる。
【0140】
上記図19に示した如く、FM放送電波に多重されているデータは、1フレーム中で、パリティにより縦方向と横方向の合わせて2重の訂正が可能となっており、D−GPSによる誤差情報のデータは信号処理部15dによって横方向、ブロック単位での1回の訂正処理の後に即有効であるものとして使用することができる。また、VICSによる交通情報のデータは2回の訂正後に使用することが決められている。
【0141】
図21は信号処理部15dによって多重データを記憶するフレームメモリを用いて実行される、VICSによる交通情報のデータの訂正の過程を示すもので、まず図21(1)に示すように、1フレーム分、全272パケットから欠落を生じたパケットを除いたものについて、D−GPSによる誤差情報のデータを挿入した上で、1回目の横方向、すなわちパケット単位での訂正を行なう。
【0142】
D−GPSによる誤差情報のデータに関しては、この1回目の横方向の訂正処理により、上述した如く即有効なものであるとして後の処理で使用する。
【0143】
したがって、同図(1)中、ハッチングで示す欠落部分LCは、PLLによる動作が不安定でVICSによる交通情報のデータが受信できなかったパケットとなる。
【0144】
次いで、図21(2)に示すように2回目の訂正としてデータフレームの縦方向の訂正処理を行なう。この訂正処理はフレーム単位で行なうものであるので、異なるフレームであるD−GPSによる誤差情報のデータはキャンセルし、1バイト毎に全34回の訂正処理を実行する。
【0145】
その後、この縦方向の訂正を行なったデータフレームに対して図21(3)に示すように2回目の横方向の訂正を行なう。この場合、訂正処理を行なうのは1フレーム全272パケット中、パリティパケットを除いた190パケットのみである。
【0146】
こうして計3回の訂正処理を実行することにより、欠落部分CLを含むVICSによる交通情報のデータを復元することができ、結果としてFMチューナ14及びFM多重デコーダ15が共に1個ずつの構成としながら、受信周波数が異なるD−GPSによる誤差情報のデータとVICSによる交通情報のデータとを同時に受信することができる。
【0147】
なお、上記図21(1)では1回目の横方向の訂正処理に際してD−GPSによる誤差情報のデータを挿入するものとして説明したが、これは一般にFMデータ多重放送で使用している信号処理部15d内に設けられるフレームメモリをそのまま使用して訂正処理を実施することができるためであり、D−GPSによる誤差情報のデータを挿入せずとも実施することは可能であるが、その場合には、D−GPSによる誤差情報のデータを記憶して訂正処理を施すためのメモリが別途必要となる。
【0148】
また、上記図18に示した回路構成に代えて、図22に示すようにFMアンテナ4に対してFMチューナ14と同様構成の2台のFMチューナ141,142を並列接続し、各FMチューナ14a,14bの出力をCPU13からの制御により動作するスイッチ41により切換選択してFM多重デコーダ15のフィルタ15aに供するものとすることも考えられる。
【0149】
この場合、例えばFMチューナ141により受信周波数82.5[MHz]のFM放送電波を、FMチューナ142により受信周波数80.0[MHz]のFM放送電波をそれぞれ受信させるものとすれば、各チューナ141,142はそれぞれ安定した状態で受信を続行しながら、FM放送電波に多重化されているデータを切換えて得ることができる。
【0150】
そのため、1台のFMチューナ14で受信周波数を切換えることでPLL動作が安定するまでの間、放送電波に多重化されているデジタルデータの受信が欠落する、などということがなく、FM多重デコーダ15自体は1台のみの構成としながら、データパケットの欠落した部分を大幅に削減することができ、データ訂正の処理における負担を軽減してほぼ確実にVICSによる交通情報のデータを得ることができる。
【0151】
さらに、上記図22の回路構成に代えて、図23に示すようにスイッチ41を廃し、FMチューナ142の出力からデジタルデータを得るための、上記フィルタ15a、PLL検波部15b、及び同期検出部15cと同様構成のフィルタ15a′、PLL検波部15b′、及び同期検出部15c′と遅延回路15gとをFM多重デコーダ15内に加えて設けることも考えられる。
【0152】
この場合、例えばFMチューナ141により受信周波数82.5[MHz]のFM放送電波を、FMチューナ142により受信周波数80.0[MHz]のFM放送電波をそれぞれ受信させるものとし、フィルタ15a、PLL検波部15b、及び同期検出部15cをVICSによる交通情報のデータを得るための回路、フィルタ15a′、PLL検波部15b′、及び同期検出部15c′をD−GPSによる誤差情報のデータを得るための回路として独立して動作させ、且つタイマ15fの動作により得られたD−GPSの誤差情報のデータを遅延回路15gで遅延保持させることで、D−GPSの誤差情報のデータとVICSによる交通情報のデータとの位相差を吸収させるものとする。
【0153】
こうすることで、FMチューナ及びFM多重デコーダにおける回路構成は幾分複雑なものとなってしまうものの、VICSによる交通情報のデータの欠落を必要最小限のD−GPSによる誤差情報のデータに相当する2パケット分のみに抑えることができ、データ訂正の処理における負担を極力軽減して、確実にVICSによる交通情報のデータを得ることができる。
【0154】
なお、上記図23の回路構成において、タイマ15f及び遅延回路15gにより、D−GPSによる誤差情報のデータの処理で欠落する2パケット分のVICSによる交通情報のデータがパリティパケットを回避するようにタイミング制御するものとすれば、訂正処理をより確実に行なって正確なVICSによる交通情報のデータを復元することができるため、大きな効果を奏するものとなる。
【0155】
また、上記図18、図22、及び図23はいずれもハードウェアによる回路構成で対処した場合を説明したが、そのような構成の回路を用いずとも、ソフトウェアによる処理のみで対処することも可能である。
【0156】
この場合、図24(1)に示すようにCPU13はD−GPSによる誤差情報のデータを受信すべくFMチューナ14の受信周波数を切換設定し(ステップD01)、実際にデータパケット1及びデータパケット2の2パケット分のD−GPSによる誤差情報のデータを受信するのを待機した後(ステップD02)、内部タイマをリセットして(ステップD03)、今度はVICSによる交通情報のデータを受信すべくFMチューナ14の受信周波数を再度切換設定する(ステップD04)。
【0157】
その後、VICSによる交通情報のデータを受信しながら該タイマがタイムアップするまで待機し(ステップD05)、タイムアップしたと判断した時点で上記ステップD01に戻る、という動作を繰返し実行するものである。
【0158】
このとき、図24(2)に示すようにCPU13の内部タイマは所定クロック毎にタイムアップしているか否かを判断し(ステップE01)、していない場合には計時値をカウントアップするものとなる(ステップE02)。
【0159】
このようにソフトウェアにより上記図18に説明した構成の回路と同等の動作を実現することができ、ナビゲーション装置を買替えずとも、装置の動作プログラムを記憶した記憶媒体を交換するのみで対処することができる。
【0160】
なお、上記第1乃至第3の実施の形態において記載した手法は、ナビゲーション装置に実行させるためのプログラムとしてCDブロック6に装着されたCD−ROMに記憶されているものとして説明したが、記憶媒体としてはこれに限定するものではなく、他の記憶媒体、例えば磁気ディスク(フロッピー(登録商標)ディスク、ハードディスク等)、光ディスク(DVD、データMD等)、半導体メモリなどに書込んで各種装置に適用したり、通信媒体により伝送して各種装置に適用することも可能であり、また自動車搭載用のナビゲーション装置のみならず、これらの各種装置を装着することによりパーソナルコンピュータ等のデータ処理装置に適用することも可能であるものとする。
【0161】
その他、本発明はその要旨を逸脱しない範囲内で種々変形して実施することが可能である。
【図面の簡単な説明】
【0162】
【図1】本発明の第1の実施の形態に係る全体の回路構成を示すブロック図。
【図2】同実施の形態に係るリモコンユニットの外観構成を示す図。
【図3】同実施の形態に係る表示画面を例示する図。
【図4】同実施の形態に係る表示画面を例示する図。
【図5】同実施の形態に係る表示画面を例示する図。
【図6】同実施の形態に係る表示画面を例示する図。
【図7】同実施の形態に係る表示画面を例示する図。
【図8】同実施の形態に係る動作処理の内容を示すフローチャート。
【図9】同実施の形態に係る表示画面中の現在位置記号の表示態様を示す図。
【図10】同実施の形態に係る表示画面を例示する図。
【図11】同実施の形態に係る表示画面を例示する図。
【図12】本発明の第2の実施の形態に係る主としてFMチューナの回路構成を示すブロック図。
【図13】同実施の形態に係る交通情報と誤差情報の受信タイミングの相違を示す図。
【図14】同実施の形態に係るD−GPSのデータの内容を示す図。
【図15】同実施の形態に係る上記D−GPSのデータとして与えられた各衛星の補正データセットの内容を示す図。
【図16】同実施の形態に係る動作処理の内容を示すフローチャート。
【図17】同実施の形態に係る動作処理の内容を示すフローチャート。
【図18】本発明の第3の実施の形態に係る主としてFM多重デコーダの回路構成を示すブロック図。
【図19】同実施の形態の動作を説明する図。
【図20】同実施の形態の動作を説明するタイミングチャート。
【図21】同実施の形態の動作を説明する図。
【図22】同実施の形態に係る主としてFMチューナ及びFM多重デコーダの他の回路構成を示すブロック図。
【図23】同実施の形態に係る主としてFMチューナ及びFM多重デコーダの他の回路構成を示すブロック図。
【図24】同実施の形態に係るソフトウェアで実現した場合の動作処理内容を例示するフローチャート。
【符号の説明】
【0163】
1…GPSアンテナ
2…GPSブロック
3…グラフィックブロック
4…FMアンテナ
5…キーブロック
6…CDブロック
7…モニタブロック
11…フラッシュEEPROM
12…RAM
13…CPU
14…FMチューナ
14a…FM受信部
14b…復調部
14c…選局コントローラ
14d…時間補正部
15…FM多重デコーダ
15a…フィルタ
15b…PLL検波部
15c…同期検出部
15d…信号処理部
15e…D−GPS検出部
15f…タイマ
15g…遅延回路
16…CPU周辺回路ゲートアレイ(G/A)
17…グラフィックコントローラ
18…ビデオRAM
20…リモコンユニット
21…リモコン本体ケース
22…電源スイッチ
23…電源LED
26…FM DATAキー
41…スイッチ
141,142…FMチューナ
【特許請求の範囲】
【請求項1】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて上記地図データ記憶手段から地図データを読出して、表示データとして展開する地図データ展開手段と、
放送電波に多重化されて送られてくるデータを受信する受信手段と、
この受信手段により交通情報のデータを受信させる第1の受信制御手段と、
上記受信手段により上記受信した複数の衛星から送信される信号の誤差情報のデータを受信させる第2の受信制御手段と、
上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、
上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た表示データを加工する加工する加工手段と、
この加工手段で得た表示データを表示する表示手段と
を具備したことを特徴とするナビゲーション装置。
【請求項2】
上記第1及び第2の受信制御手段のうち、少なくとも一方は周波数サーチを行なうことによりデータを受信させることを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
上記第3の受信制御手段は、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、その同一周波数で他方のデータも受信できるか否かを判断し、他方のデータが受信できないと判断した際には上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させることを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
上記第3の受信制御手段は上記第1及び第2の受信制御手段により上記交通情報のデータの内容の更新周期に対応してその受信の切換タイミングを設定することを特徴とする請求項1乃至3いずれかに記載のナビゲーション装置。
【請求項5】
上記第3の受信制御手段は、上記第2の受信制御手段により放送電波に多重化されて送られてくる誤差情報のデータを受信させた際、その誤差情報のデータ内容に応じた周期で周波数を変えて上記第1の受信制御手段により交通情報のデータも受信させることを特徴とする請求項1乃至4いずれかに記載のナビゲーション装置。
【請求項6】
上記第3の受信制御手段は、上記第2の受信制御手段による放送電波に多重化されて送られてくる誤差情報のデータの受信タイミングに合わせて当該誤差情報のデータを受信させることを特徴とする請求項1乃至4いずれかに記載のナビゲーション装置。
【請求項7】
上記受信手段は、放送電波の選局受信を行なう2つのチューナ部、これら2つのチューナ部のいずれかで受信した放送電波に多重化されて送られてくるデータをデコードするデコーダ部、及び上記2つのチューナ部のいずれかで受信した放送電波とを切換選択して上記デコーダ部に供給するスイッチ部を有し、
上記第1の受信制御手段は、上記受信手段の2つのチューナ部の一方により交通情報のデータを受信させ、
上記第2の受信制御手段は、上記受信手段の2つのチューナ部の他方により誤差情報のデータを受信させ、
上記第3の受信制御手段は、上記受信手段のスイッチ部を切換設定することで誤差情報のデータと交通情報のデータの受信を切換える
ことを特徴とする請求項6記載のナビゲーション装置。
【請求項8】
上記受信手段のデコーダ部は、上記他方のチューナ部で受信する誤差情報のデータが多重化された放送電波を遅延して入力する遅延回路をさらに有する
ことを特徴とする請求項7記載のナビゲーション装置。
【請求項9】
複数の衛星から送信される信号を受信する第1の受信手段と放送電波に多重化されて送られてくる交通情報のデータ及び上記複数の衛星から送信される信号の誤差情報のデータを受信する第2の受信手段とを有するナビゲーション装置のためのプログラムを記憶した記憶媒体であって、
上記第2の受信手段により上記交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、第2の受信手段により周波数を変えて該他方のデータを受信させるプログラムを記憶したことを特徴とする記憶媒体。
【特許請求の範囲】
【請求項1】
現在位置を認識するためのナビゲーション装置において、
現在位置を示す現在位置記号を表示する現在位置表示手段と、
前記現在位置の期待される位置の誤差の程度を判断する誤差程度判断手段と、
前記誤差程度判断手段の判断結果に応じて、前記現在位置記号の表示形態を前記位置の誤差の程度を識別可能な状態に変化させる誤差程度識別表示手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記誤差程度識別手段は、前記現在位置記号の大きさを変化させることにより、前記位置の誤差の程度を識別可能に構成した
ことを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記誤差程度識別手段は、前記位置の誤差が大きくなるにつれて、前記現在位置記号の大きさを拡大するように構成した
ことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項4】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて前記地図データ記憶手段から地図データを読出して、地図展開データとして展開する地図データ展開手段と、
を備え、
前記現在位置表示手段は、前記地図データ展開手段により展開表示された地図上における前記測位手段により測位された現在位置に対応する位置に、前記現在位置記号を表示する
ことを特徴とする、請求項1乃至請求項3に記載のナビゲーション装置。
【請求項5】
前記誤差程度識別手段は、前記地図データ展開手段により展開表示された地図上の現在位置を中心とした誤差の距離を示す円状の現在位置記号を表示することを特徴とする、請求項4に記載のナビゲーション装置。
【請求項6】
複数の衛星から受信される信号の誤差を示し、放送電波に多重化されて送られてくる誤差情報のデータを受信させる第1の受信制御手段と、
前記第1の受信制御手段により前記誤差情報のデータが受信された場合に、この誤差情報のデータに基づいて前記測位手段により測位される前記現在位置を補正する補正手段と、
前記第1の受信制御手段による前記誤差情報のデータの受信を有効とするオン設定と、該受信を無効とするオフ設定とを選択可能にする第1の選択手段と、
を備え、
前記誤差程度判断手段は、前記第1の選択手段がオン設定である場合に前記位置の誤差の程度がより少ないと判断し、オフ設定である場合に前記位置の誤差の程度がより大きいと判断する
ことを特徴とする、請求項4乃至請求項5に記載のナビゲーション装置。
【請求項7】
複数の周波数の中から受信の対象となる受信対象情報が放送されている周波数に同調させて、この受信対象情報を受信する受信手段と、
前記受信手段の周波数を第2の周波数に同調させることにより交通情報のデータを受信させる第2の受信制御手段と、
前記第2の受信制御手段による前記交通情報のデータの受信が有効なオン設定と該受信が無効なオフ設定を選択可能にする第2の選択手段と、
を備え、
前記第1の受信制御手段は、前記受信手段の周波数を第1の周波数に同調させることにより前記誤差情報のデータを受信することを特徴とする、請求項6に記載のナビゲーション装置。
【請求項8】
前記第1の選択手段がオン設定とオフ設定の何れに設定されているかを識別可能にする第1のシンボルを表示する第1のシンボル表示手段と、
前記第1のシンボル表示手段による前記第1のシンボルの表示/非表示を制御するシンボル表示制御手段と、を更に備えたことを特徴とする、請求項7に記載のナビゲーション装置。
【請求項9】
前記第2の選択手段がオン設定とオフ設定の何れに設定されているかを識別可能にする第2のシンボルを表示する第2のシンボル表示手段を更に備え、
前記シンボル表示制御手段は、前記第1のシンボルの表示/非表示と前記第2のシンボルの表示/非表示とを独立して制御することを特徴とする、請求項8に記載のナビゲーション装置。
【請求項10】
前記第1のシンボル表示手段および前記第2のシンボル表示手段は、前記オン設定とオフ設定を識別可能にすると共に、前記受信手段により受信されている放送電波の受信周波数を表示可能な形態で前記第1のシンボルおよび前記第2のシンボルを表示することを特徴とする、請求項9に記載のナビゲーション装置。
【請求項11】
前記第2のシンボル表示手段は、前記第2の受信制御手段により受信される放送電波に多重化された交通情報のデータの最新の情報の取得時刻をも表示可能な形態で前記第2のシンボルを表示することを特徴とする、請求項9乃至請求項10に記載のナビゲーション装置。
【請求項12】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて前記地図データ記憶手段から地図データを読出して、地図展開データとして展開する地図データ展開手段と、
放送電波に多重化されて送られてくるデータを受信させる受信手段と、
上記受信手段及び上記測位手段により、複数の衛星から受信される信号の誤差を示す誤差情報のデータを受信させる第1の受信制御手段と、
前記第1の受信制御手段により前記誤差情報のデータが受信された場合に、この誤差情報のデータに基づいて前記測位手段により測位される前記現在位置を補正する補正手段と、
上記受信手段により、交通情報のデータを受信させる第2の受信制御手段と、
上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、
上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、
上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た地図展開データを変更する変更手段と、
この変更手段で得た表示データを表示する表示手段と、
を備え、
上記表示手段は、前記現在位置表示手段と、前記誤差程度識別表示手段により、前記現在位置記号を表示するように構成した
ことを特徴とする、請求項1に記載のナビゲーション装置。
【請求項13】
現在位置を認識するためのナビゲーション方法において、
現在位置記号を用いて現在位置を示す現在位置表示工程と、
前記現在位置の期待される位置の誤差の程度を判断する誤差程度判断工程と、
前記誤差程度判断工程に応じて、前記現在位置記号を変化させることにより、前記位置の誤差の程度を識別可能する誤差程度識別表示工程と、
を備えたことを特徴とするナビゲーション方法。
【請求項1】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて上記地図データ記憶手段から地図データを読出して、表示データとして展開する地図データ展開手段と、
放送電波に多重化されて送られてくるデータを受信する受信手段と、
この受信手段により交通情報のデータを受信させる第1の受信制御手段と、
上記受信手段により上記受信した複数の衛星から送信される信号の誤差情報のデータを受信させる第2の受信制御手段と、
上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、
上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た表示データを加工する加工する加工手段と、
この加工手段で得た表示データを表示する表示手段と
を具備したことを特徴とするナビゲーション装置。
【請求項2】
上記第1及び第2の受信制御手段のうち、少なくとも一方は周波数サーチを行なうことによりデータを受信させることを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
上記第3の受信制御手段は、上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、その同一周波数で他方のデータも受信できるか否かを判断し、他方のデータが受信できないと判断した際には上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させることを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
上記第3の受信制御手段は上記第1及び第2の受信制御手段により上記交通情報のデータの内容の更新周期に対応してその受信の切換タイミングを設定することを特徴とする請求項1乃至3いずれかに記載のナビゲーション装置。
【請求項5】
上記第3の受信制御手段は、上記第2の受信制御手段により放送電波に多重化されて送られてくる誤差情報のデータを受信させた際、その誤差情報のデータ内容に応じた周期で周波数を変えて上記第1の受信制御手段により交通情報のデータも受信させることを特徴とする請求項1乃至4いずれかに記載のナビゲーション装置。
【請求項6】
上記第3の受信制御手段は、上記第2の受信制御手段による放送電波に多重化されて送られてくる誤差情報のデータの受信タイミングに合わせて当該誤差情報のデータを受信させることを特徴とする請求項1乃至4いずれかに記載のナビゲーション装置。
【請求項7】
上記受信手段は、放送電波の選局受信を行なう2つのチューナ部、これら2つのチューナ部のいずれかで受信した放送電波に多重化されて送られてくるデータをデコードするデコーダ部、及び上記2つのチューナ部のいずれかで受信した放送電波とを切換選択して上記デコーダ部に供給するスイッチ部を有し、
上記第1の受信制御手段は、上記受信手段の2つのチューナ部の一方により交通情報のデータを受信させ、
上記第2の受信制御手段は、上記受信手段の2つのチューナ部の他方により誤差情報のデータを受信させ、
上記第3の受信制御手段は、上記受信手段のスイッチ部を切換設定することで誤差情報のデータと交通情報のデータの受信を切換える
ことを特徴とする請求項6記載のナビゲーション装置。
【請求項8】
上記受信手段のデコーダ部は、上記他方のチューナ部で受信する誤差情報のデータが多重化された放送電波を遅延して入力する遅延回路をさらに有する
ことを特徴とする請求項7記載のナビゲーション装置。
【請求項9】
複数の衛星から送信される信号を受信する第1の受信手段と放送電波に多重化されて送られてくる交通情報のデータ及び上記複数の衛星から送信される信号の誤差情報のデータを受信する第2の受信手段とを有するナビゲーション装置のためのプログラムを記憶した記憶媒体であって、
上記第2の受信手段により上記交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、第2の受信手段により周波数を変えて該他方のデータを受信させるプログラムを記憶したことを特徴とする記憶媒体。
【特許請求の範囲】
【請求項1】
現在位置を認識するためのナビゲーション装置において、
現在位置を示す現在位置記号を表示する現在位置表示手段と、
前記現在位置の期待される位置の誤差の程度を判断する誤差程度判断手段と、
前記誤差程度判断手段の判断結果に応じて、前記現在位置記号の表示形態を前記位置の誤差の程度を識別可能な状態に変化させる誤差程度識別表示手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記誤差程度識別手段は、前記現在位置記号の大きさを変化させることにより、前記位置の誤差の程度を識別可能に構成した
ことを特徴とする、請求項1に記載のナビゲーション装置。
【請求項3】
前記誤差程度識別手段は、前記位置の誤差が大きくなるにつれて、前記現在位置記号の大きさを拡大するように構成した
ことを特徴とする、請求項2に記載のナビゲーション装置。
【請求項4】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて前記地図データ記憶手段から地図データを読出して、地図展開データとして展開する地図データ展開手段と、
を備え、
前記現在位置表示手段は、前記地図データ展開手段により展開表示された地図上における前記測位手段により測位された現在位置に対応する位置に、前記現在位置記号を表示する
ことを特徴とする、請求項1乃至請求項3に記載のナビゲーション装置。
【請求項5】
前記誤差程度識別手段は、前記地図データ展開手段により展開表示された地図上の現在位置を中心とした誤差の距離を示す円状の現在位置記号を表示することを特徴とする、請求項4に記載のナビゲーション装置。
【請求項6】
複数の衛星から受信される信号の誤差を示し、放送電波に多重化されて送られてくる誤差情報のデータを受信させる第1の受信制御手段と、
前記第1の受信制御手段により前記誤差情報のデータが受信された場合に、この誤差情報のデータに基づいて前記測位手段により測位される前記現在位置を補正する補正手段と、
前記第1の受信制御手段による前記誤差情報のデータの受信を有効とするオン設定と、該受信を無効とするオフ設定とを選択可能にする第1の選択手段と、
を備え、
前記誤差程度判断手段は、前記第1の選択手段がオン設定である場合に前記位置の誤差の程度がより少ないと判断し、オフ設定である場合に前記位置の誤差の程度がより大きいと判断する
ことを特徴とする、請求項4乃至請求項5に記載のナビゲーション装置。
【請求項7】
複数の周波数の中から受信の対象となる受信対象情報が放送されている周波数に同調させて、この受信対象情報を受信する受信手段と、
前記受信手段の周波数を第2の周波数に同調させることにより交通情報のデータを受信させる第2の受信制御手段と、
前記第2の受信制御手段による前記交通情報のデータの受信が有効なオン設定と該受信が無効なオフ設定を選択可能にする第2の選択手段と、
を備え、
前記第1の受信制御手段は、前記受信手段の周波数を第1の周波数に同調させることにより前記誤差情報のデータを受信することを特徴とする、請求項6に記載のナビゲーション装置。
【請求項8】
前記第1の選択手段がオン設定とオフ設定の何れに設定されているかを識別可能にする第1のシンボルを表示する第1のシンボル表示手段と、
前記第1のシンボル表示手段による前記第1のシンボルの表示/非表示を制御するシンボル表示制御手段と、を更に備えたことを特徴とする、請求項7に記載のナビゲーション装置。
【請求項9】
前記第2の選択手段がオン設定とオフ設定の何れに設定されているかを識別可能にする第2のシンボルを表示する第2のシンボル表示手段を更に備え、
前記シンボル表示制御手段は、前記第1のシンボルの表示/非表示と前記第2のシンボルの表示/非表示とを独立して制御することを特徴とする、請求項8に記載のナビゲーション装置。
【請求項10】
前記第1のシンボル表示手段および前記第2のシンボル表示手段は、前記オン設定とオフ設定を識別可能にすると共に、前記受信手段により受信されている放送電波の受信周波数を表示可能な形態で前記第1のシンボルおよび前記第2のシンボルを表示することを特徴とする、請求項9に記載のナビゲーション装置。
【請求項11】
前記第2のシンボル表示手段は、前記第2の受信制御手段により受信される放送電波に多重化された交通情報のデータの最新の情報の取得時刻をも表示可能な形態で前記第2のシンボルを表示することを特徴とする、請求項9乃至請求項10に記載のナビゲーション装置。
【請求項12】
道路情報を含む地図データが記憶された地図データ記憶手段と、
受信した複数の衛星から送信される信号に基づいて現在位置を測位する測位手段と、
この測位手段で得た現在位置に基づいて前記地図データ記憶手段から地図データを読出して、地図展開データとして展開する地図データ展開手段と、
放送電波に多重化されて送られてくるデータを受信させる受信手段と、
上記受信手段及び上記測位手段により、複数の衛星から受信される信号の誤差を示す誤差情報のデータを受信させる第1の受信制御手段と、
前記第1の受信制御手段により前記誤差情報のデータが受信された場合に、この誤差情報のデータに基づいて前記測位手段により測位される前記現在位置を補正する補正手段と、
上記受信手段により、交通情報のデータを受信させる第2の受信制御手段と、
上記第1または第2の受信制御手段により放送電波に多重化されて送られてくる交通情報のデータ及び誤差情報のデータのいずれか一方を受信させた後、
上記第1または第2の受信制御手段により周波数を変えて該他方のデータを受信させる第3の受信制御手段と、
上記第1の受信制御手段で得た交通情報のデータ及び上記第2の受信制御手段で得た誤差情報のデータを用いて上記地図データ展開手段で得た地図展開データを変更する変更手段と、
この変更手段で得た表示データを表示する表示手段と、
を備え、
上記表示手段は、前記現在位置表示手段と、前記誤差程度識別表示手段により、前記現在位置記号を表示するように構成した
ことを特徴とする、請求項1に記載のナビゲーション装置。
【請求項13】
現在位置を認識するためのナビゲーション方法において、
現在位置記号を用いて現在位置を示す現在位置表示工程と、
前記現在位置の期待される位置の誤差の程度を判断する誤差程度判断工程と、
前記誤差程度判断工程に応じて、前記現在位置記号を変化させることにより、前記位置の誤差の程度を識別可能する誤差程度識別表示工程と、
を備えたことを特徴とするナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2006−58306(P2006−58306A)
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【出願番号】特願2005−256171(P2005−256171)
【出願日】平成17年9月5日(2005.9.5)
【分割の表示】特願平9−263699の分割
【原出願日】平成9年9月29日(1997.9.29)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【出願日】平成17年9月5日(2005.9.5)
【分割の表示】特願平9−263699の分割
【原出願日】平成9年9月29日(1997.9.29)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]