
ナビゲーション装置及びナビゲーション方法
【課題】 運転技能に応じた適切な操作案内をドライバに提供できるナビゲーション装置及びナビゲーション方法を提供する。
【解決手段】 車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備えるナビゲーション装置。
【解決手段】 車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備えるナビゲーション装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に運転技能に応じた操作案内をドライバに提供するナビゲーション装置及びナビゲーション方法に関する。
【背景技術】
【0002】
特許文献1には、各道路の走行回数に応じて各道路の音声案内を簡略化するナビゲーション装置が開示されている。ドライバは、走行回数が多い道路については道案内を必要としないため、特許文献1に開示されたナビゲーション装置では、不必要な道案内がナビゲーション装置から出力されることによってドライバが感ずる不快感を軽減することができる。
【0003】
ところで、道路を良く知っていても、円滑にその道路を通行するための運転支援が必要とされる場合がある。例えば、車両が高速道路本線に進入する状況では、運転技能が低いドライバに適切な操作案内が提供されることが望まれる。また例えば、ドライバが車線変更や駐車をする状況では、車線変更技能や駐車技能が低いドライバに適切な操作案内が提供されることが望まれる。
【0004】
【特許文献1】特開2003−57059号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、前述の要請に鑑みて創作されたものであって、運転技能に応じた適切な操作案内をドライバに提供できるナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するためのナビゲーション装置は、車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態判定手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備える。
予め決められた特定状況にはその状況に応じた適正な車両制御状態がある。例えば自車が走行する隣接レーンに併走車両がいる場合に適切なのはレーンを維持する舵角制御である。このため、ナビゲーション装置は、特定の状況における現実の車両制御状態を検出し、その状況における適正な車両制御状態を特定すると、現実の車両制御状態と適正な車両制御状態とに基づいて、その状況におけるドライバの運転技能を学習することができる。ナビゲーション装置は、このようにして学習した特定状況におけるドライバの運転技能に応じた操作案内を、後に発生するその特定状況で出力することにより、運転技能に応じた適切な操作案内をドライバに提供することができる。
【0007】
(2)前記ナビゲーション装置は、前記現実の車両制御状態と前記適正な適正車両制御状態とに基づいて前記特定状況で警告を出力する警告手段をさらに備えてもよい。前記学習手段は、前記警告の出力頻度に基づいて前記運転技能を学習してもよい。
ナビゲーション装置は、特定状況における適正な車両制御状態と現実の車両制御状態とに基づいて警告を出力することにより、危険回避を支援する警告をドライバに提供することができる。特定状況においてそのように出力される警告の頻度とドライバの運転技能とは強く相関するため、ナビゲーション装置は警告の出力頻度に基づいてドライバの運転技能を正しく学習することができる。
【0008】
(3)前記状況判定手段は、前記車両がある状況を検出する状況検出手段によって検出された前記状況に基づいて前記車両が前記特定状況にあると判定してもよい。
ナビゲーション装置は、車両がある状況を検出することにより、車両が予め決められた特定状況にあることを自動判定することができる。
【0009】
(4)前記状況判定手段は、前記状況検出手段によって検出された前記状況に基づいて高速道路本線に進入するという前記特定状況にあると判定してもよい。
高速道路本線に進入しようとする状況ではドライバは恐怖感や緊張感を持ちやすいので、運転技能の低いドライバに対しては適切な操作案内が提供されることが望ましい。このため、ナビゲーション装置は、高速道路本線に進入しようとする状況を判定し、その状況で運転技能に応じた操作案内をすることが望ましい。
【0010】
(5)前記現実状態検出手段は、舵角を含む前記現実の車両制御状態を検出してもよい。
【0011】
(6)前記現実状態検出手段は、車速を含む前記現実の車両制御状態を検出してもよい。
【0012】
(7)前記現実状態検出手段は、近傍車両に対する前記自車の距離を含む前記現実の車両制御状態を検出してもよい。
【0013】
(8)上記目的を達成するためのナビゲーション方法は、車両が予め決められた特定状況にあると判定し、前記特定状況における現実の車両制御状態と適正な車両制御状態とを判定し、前記現実の車両制御状態と前記適正な車両制御状態とを比較した結果に基づいて前記特定状況におけるドライバの運転技能を学習し、学習された前記運転技能に応じた操作案内を前記特定状況で出力する。
特定の状況における現実の車両制御状態を判定し、その状況における適正な車両制御状態を特定すると、現実の車両制御状態と適正な車両制御状態とに基づいて、その状況におけるドライバの運転技能を学習することができる。このようにして学習した特定状況におけるドライバの運転技能に応じた操作案内を、後に発生するその特定状況で出力することにより、運転技能に応じた適切な操作案内をドライバに提供することができる。
【0014】
尚、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順番で実行されてもよく、また同時に実行されてもよい。また、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、又はそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。また、本発明は、プログラムの発明としても、そのプログラムを記録した記録媒体の発明としても特定することができる。
【発明を実施するための最良の形態】
【0015】
以下、高速道路本線への合流支援に本発明を適用した実施例に基づいて本発明の実施の形態を説明する。
(ナビゲーション装置の構成)
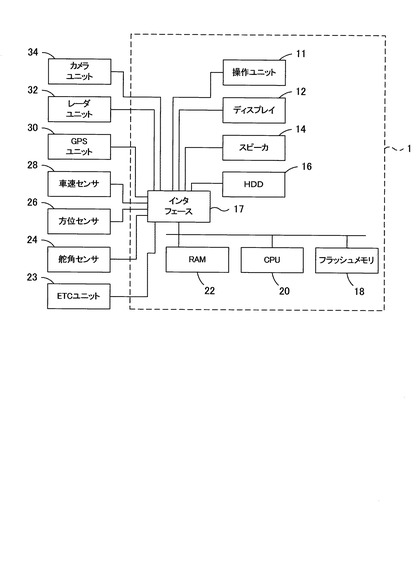
図2は本発明の一実施例によるナビゲーション装置1のハードウェア構成を示すブロック図である。ナビゲーション装置1は自動車、オートバイ等の車両に搭載される。
【0016】
ハードディスク装置(HDD)16には、地図データベース(地図DB)が格納されている。自車周辺の地図情報は、ナビゲーション装置が交通情報センタと通信することにより取得してもよい。
状況状況検出手段としての方位センサ26は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
【0017】
状況検出手段及び現実状態検出手段としての車速センサ28は、自車速度の検出と推測航法に用いられ、スピードメータに使用される車速センサである。車速を時間で積分することにより、走行距離が求まる。車速センサは、車輪回転速度を用いた車速センサの他、電波や超音波を用いたドップラ対地車速センサ、光と空間フィルタを用いた対地車速センサ等で構成することができる。
【0018】
状況検出手段としてのGPSユニット30は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信するアンテナ、自車の現在地の緯度経度データを出力するためのASIC等で構成される。自車の現在地の緯度経度データと地図DBに登録されている高速道路合流点に対応するノードの緯度経度属性とに基づいて、自車が高速道路に間もなく進入する状況にあることを検出することができる。
【0019】
状況検出手段及び現実状態検出手段としてのレーダユニット32は、光レーダ、電波レーダ等で構成され、近傍車両の自車に対する位置を検出する。近傍車両の自車に対する変位を時間で微分することにより、近傍車両の進行方向及び速度を求めることができる。
状況検出手段としてのカメラユニット34は、レーンマーカ認識に用いるCCDカメラ、CMOSカメラ等のディジタルカメラで構成されている。カメラユニット34は、自車の前方又は後方の路面画像を撮像することにより、自車の走行レーンを特定するためのレーンマークを撮像することができ、自車の側方を撮像することにより、高速道路本線への合流禁止区間を示すゼブラゾーンや併走車両を撮像することができる。誘導ケーブル方式、磁気マーカ方式、リフレクタ方式に対応したレーンマーカを認識することにより、自車の走行レーンを検出してもよい。尚、カメラユニット34は現実状態検出手段としても機能しうる。
【0020】
現実状態検出手段としての舵角センサ24は、磁気、光等を用いた非接触方式の回転角センサ等で構成され、ステアリングホイールの絶対舵角を検出する。絶対舵角を追跡することにより、加速レーンから本線に進入するタイミングや、本線への合流が完了するタイミングや、本線に合流しようとした後に加速レーンに戻る衝突回避操作を検出することができる。尚、舵角センサ24は、状況検出手段としても機能しうる。
状況検出手段としてのETCユニット23は、有料道路の出入口料金所に設けられた通信装置と通信するためのアンテナ及びASICを備える。ETCユニット23は、有料道路の走行区間に応じた課金額情報を高速道路の出入り口料金所に設けられた通信装置から取得し、前払い情報から課金額を引き算する。ETCユニット23と高速道路の入口料金所との通信を検出することにより、自車が高速道路本線に間もなく進入する状況にあることを検出することができる。
【0021】
案内手段を構成するディスプレイ12は、操作案内や地図や走行経路案内の表示に用いるFPD(Flat Panel Display)、HUD(Head Up Display)等で構成される。
案内手段を構成するスピーカ14は、操作や走行経路の案内音声の出力に用いられる。スピーカ14はオーディオスピーカと共用してもよいし、ナビゲーション専用でもよい。
インタフェース17は、AD変換器、DA変換器等で構成され、上述した各種の入出力ユニットとCPU20との間で信号形態の変換を行う。
RAM22は、CPU20で処理されるデータやプログラムを一時的に格納する。
【0022】
フラッシュメモリ18は、CPU20で実行される制御プログラムを格納しているEEPROMなどの不揮発性のメモリである。またフラッシュメモリ18にはナビゲーション装置1への電源供給が遮断されている状態に保持しなければならない情報が格納される。このような情報としては、案内モードの設定やドライバの運転技能等がある。制御プログラムやこのような情報はHDD16に格納してもよい。制御プログラム及び地図DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもフラッシュメモリ18又はHDD16に格納することができる。
CPU20は、制御プログラムを実行することによりナビゲーション装置1の各部を制御する。
【0023】
図3はナビゲーション装置1の制御プログラムのソフトウェア構成を示すブロック図である。
地図DB42は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、道路網上の自車の位置の検出、レーン数の検出、高速道路への合流態様の案内などに用いられる。地図DB42では、交差点、合流点、曲がり点、行き止まり点などはノードであり、道路はノードとノードとを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、道路種別(高速道路、一般道など)などが属性情報として定義され、各ノードには信号の有無などが属性情報として定義されている。
【0024】
自車位置検出モジュール44は、CPU20を状況検出手段として機能させるプログラム部品である。自車位置検出モジュール44は、地図DB42を用いてマップマッチングによる補正を行いながら、GPSユニット30から入力される自車の現在地の緯度経度データと、車速センサ28から入力される走行速度と、方位センサ26から入力される進行方位とに基づいて自車の道路網上の位置を算出する。
【0025】
状況判定モジュール48は、CPU20を状況判定手段として機能させるプログラム部品である。状況判定モジュール48は、道路網上の自車の位置、ETCユニット23と高速道路の入口料金所との通信タイミング、カメラユニット34から出力される画像によって認識するゼブラゾーンの位置などに基づいて自車が高速道路本線に進入する状況にあると判定する。尚、車両がおかれている状況を判定する要素としては、これらの他、道路の傾斜角、外気温、道路の明るさ、降雨量、道路幅員、レーン数、カーブの曲率などがある。
【0026】
状態判定モジュール50は、CPU20を現実状態検出手段として機能させるプログラム部品である。状態判定モジュール50は、カメラユニット34から出力される画像とレーダユニット32から出力される障害物(車両、壁など)の位置情報とに基づいて自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置等を認識し、車速センサ28から出力される車速情報と舵角センサ24から出力される舵角情報とに基づいて自車の車速及び舵角を認識する。自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置、自車の車速、自車の舵角等は、自車が置かれている状況に対してどのような車両制御が行われているかを示しており、現実の車両制御状態を表すパラメータである。尚、車両制御状態を表すパラメータとしては、これらの他、アクセルペダル等のペダル類の踏み込み量、シフトレバーやパーキングレバーの位置、方位センサの出力、エンジン回転数、障害物と自車との距離等がある。
【0027】
案内モジュール56は、CPU20を適正状態特定手段及び案内手段として機能させるプログラム部品である。案内モジュール56は、単語、節などの文章要素毎の音声データを組み合わせて案内音声データを生成して案内音声や警告音声をスピーカ14に出力したり、高速道路の合流地点の路面を表す図形画像と合流経路を示す矢印とを合成表示する。案内モジュール56は、自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置、自車の車速、自車の舵角等で構成される現実の車両制御状態と、高速道路本線進入時の車両制御状態について予め決められた適正な車両制御状態とを比較した結果に基づいてドライバの運転技能と案内モードに応じた操作案内データ及び警告データを生成する。尚、操作案内は画像及び音声の他、ハンドル、アクセルペダル、シフトレバー等の振動等によってもドライバに提供することができる。
【0028】
学習モジュール52は、CPU20を学習手段として機能させるプログラム部品である。学習モジュール52は、高速道路本線の進入時に現実に起こった車両制御状態と高速道路本線の進入時の適正な車両制御状態とを比較した結果や、高速道路本線の進入時に出力された警告の出力頻度等に基づいて、高速道路本線に進入時のドライバの運転技能を判定する。ドライバの運転技能は、「高速道路本線に進入する」、「縦列駐車する」、「レーンチェンジする」というような位置と無関係な状況毎に判定しても良いし、「○○インターチェンジで高速道路本線に進入する」、「○○パーキングの○○番の枠に縦列駐車する」というような特定の位置でドライバがおかれる状況毎に判定しても良い。さらに、加速レーンの長さ、加速レーン形状(本線と平行かそうでないか)、合流地点の本線形状(カーブ、車線数)といった詳細な地形的特徴毎に状況を区分してドライバの運転技能を判定しても良い。
設定モジュール54は、ドライバによる案内モードの設定操作を受け付け、設定操作に応じた案内モードを設定する。
【0029】
(ナビゲーション装置の作動)
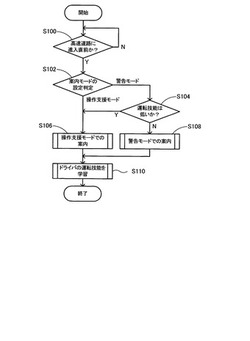
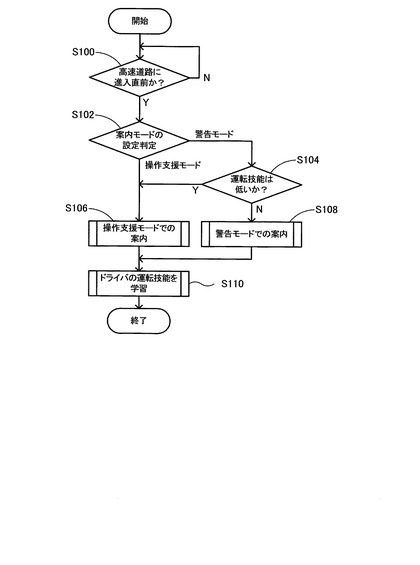
図1はナビゲーション装置1の処理の流れを示すフローチャートである。図1に示す処理は、CPU20が制御プログラムを実行することによって走行中に繰り返し実行される。
ステップS100では、ナビゲーション装置1は自車が高速道路に進入する直前であるか判定する。具体的には、道路網上の自車の位置、高速道路入口料金所の通過、ドライバによる高速道路進入支援指示の入力等によってCPU20は自車が高速道路に進入する直前であると判定する。
【0030】
ステップS102では、ナビゲーション装置1はドライバによって設定された案内モードを判定する。具体的には、CPU20は案内モードの設定を読み込み、衝突回避警告だけが出力される警告モードに設定されているか高速道路本線に進入するために必要な操作案内等が出力される操作支援モードに設定されているかを判定する。
【0031】
警告モードが設定されている場合、ナビゲーション装置1はドライバの運転技能が低いか判定する(ステップS104)。具体的には、ナビゲーション装置1が学習した過去に起こった現在と同じ状況におけるドライバの運転技能の設定をCPU20が読み込み、運転技能が低いかどうかを判定する。ドライバの運転技能が低い場合、警告モードが設定されていても操作支援モードと同一の案内及び警告が出力されるように、CPU20はステップS106の処理に進む。
ステップS106では、ナビゲーション装置1は操作支援モードで作動し、高速道路本線への合流態様を示す画像を表示し、必要に応じて、高速道路本線に進入するために必要な操作案内と警告を出力する。
【0032】
1.操作支援モードでの操作案内
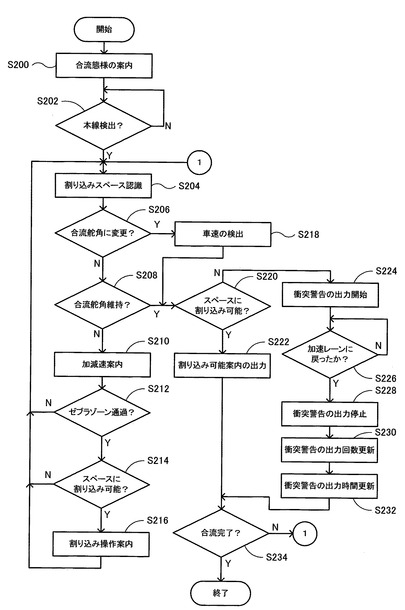
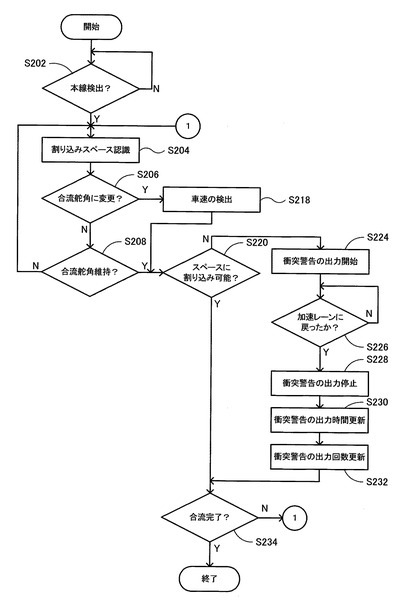
図4は、ステップS106の処理の詳細を示すフローチャートである。
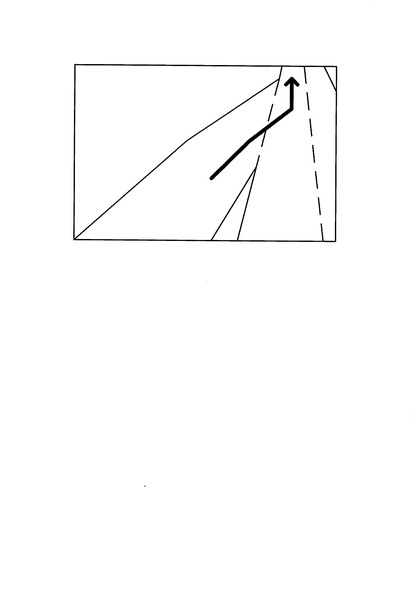
ステップS200では、ナビゲーション装置1は高速道路本線への合流態様をドライバに案内する。具体的には、CPU20は、ディスプレイ12の画面に自車がこれから進入する高速道路本線と加速レーンとの接続形態を示す画像(図5参照)を表示したり、「この先で高速道路の左車線に合流します。加速レーンが短いので加速レーン進入前にランプでの加速が必要になります。」というような案内音声を出力する。
【0033】
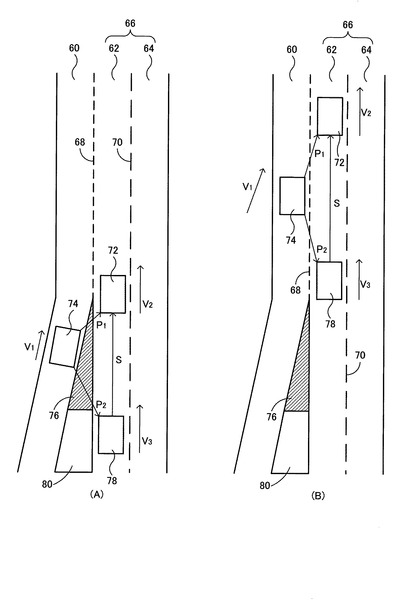
ステップS202では、ナビゲーション装置1は高速道路本線を検出するまで高速道路本線の検出処理を繰り返す。具体的にはCPU20はカメラユニット34から出力される自車の側方又は前方の動画像等に基づいて高速道路本線のレーンマークの検出処理を繰り返す。例えば図6に示す合流形態では、本線66と加速レーン60とを隔てる壁80を通過すると、自車74の斜め前方を撮像しているカメラユニット34によって高速道路本線66の左レーン62と右レーン64とを区切るレーンマーク70が撮像され、その結果、高速道路本線66が検出される。
【0034】
ステップS204では、ナビゲーション装置1は高速道路本線を走行している車列の割り込みスペースを認識する。具体的にはCPU20はレーダユニット32から出力される近傍車両の位置情報に基づいて高速道路本線を走行している車列の割り込みスペースの位置・速度・長さを検出する。図6を参照しながらより詳細に説明すると次のとおりである。レーダユニット32からは高速道路本線66の左レーン62を走行する車両72と車両78の自車74に対する位置P1、P2を示す位置情報が出力される。割り込みスペースの位置は、先行車両72の位置P1又は後続車両78の位置P2として求めることができる。割り込みスペースの速度は、割り込みスペース前方の車両の速度又は割り込みスペース後方の車両の速度として求めることができ、それらの車両の位置を時間で微分することによって求まる。割り込みスペースの長さは、位置P2を始点としP1を終点とするベクトルSの大きさとして求めることができる。
【0035】
ステップS206では、ナビゲーション装置1は加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されたか判定する。具体的には例えばCPU20は、舵角センサ24の出力に基づいて、舵角が所定時間内に直進舵角から予め決められた角度以上変動したとき、加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定する。また例えばCPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいて、本線と加速レーンとを区切るレーンマークを自車が跨ぎはじめたり、自車の進行方向とレーンマークの方向のずれが所定時間内に所定値より大きく変動したとき、加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定する。CPU20が加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定したタイミングは、自車が高速道路の本線車線に進入するタイミングと判定することができる。
【0036】
加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更された場合、ナビゲーション装置1は自車の車速を検出する(ステップS218)。この処理は高速道路の本線車線に進入する状況での適正な車速と、そのときの現実の車速とを比較することによってドライバの運転技能を判定するために実施される。また、このとき、ウィンカーが点滅しているかどうかを判定し、この判定結果を運転技能の判定に用いてもよい。
【0037】
ステップS206で加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されなかったと判定された場合、ナビゲーション装置1は合流舵角が維持されているか判定する(ステップS208)。当然のことながら、加速レーンを維持している場合には、ステップS206で加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されなかったと判定され、ステップS208でも合流舵角が維持されていないと判定される。合流舵角に変更した後にそのまま高速道路本線に合流しようとしている場合にはナビゲーション装置1は合流舵角が維持されていると判定する。具体的には例えば、CPU20は、舵角センサ24の出力に基づいて、高速道路本線に合流するための舵角に変更された後の舵角変動幅が所定範囲内であれば合流舵角が維持されていると判定する。また例えば、CPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいて、自車の進行方向とレーンマークの方向のずれが所定範囲内であれば合流舵角が維持されていると判定する。
【0038】
合流舵角が維持されていない場合、ナビゲーション装置1は加速又は減速を促す案内を出力する(ステップS210)。具体的には例えば、CPU20は、車速センサ28の出力から自車の速度を取得し、現在進入しようとしている高速道路本線の法定速度を地図DB42から取得し、自車速度と、高速道路本線の法定速度と、高速道路本線を走行している車列の割り込みスペースの位置・速度・長さとから、割り込みスペースに安全に進入するための適正な車速を算出し、算出した適正車速と現在の自車速度との差に応じて加速又は減速が必要かどうかを判定する。CPU20は加速又は減速が必要と判定した場合、加速又は減速を促す案内音声をスピーカ14から出力し、加速又は減速を促す案内画面をディスプレイ12に表示する。
【0039】
ステップ212では、ナビゲーション装置1は自車がゼブラゾーンを通過したか判定する。具体的にはCPU20は、カメラユニット34から出力される自車の前方、側方又は後方の路面画像に基づいてゼブラゾーンを検出し追跡することにより、自車がゼブラゾーンを通過したか判定する。ゼブラゾーンを通過するまでは、加速レーンから高速道路本線に安全に進入できる状況にならない。このため、ナビゲーション装置1はゼブラゾーンを通過する前に高速道路本線に進入するための車両制御状態を検出した場合に警告を出力してもよい。
【0040】
ステップS214では、ナビゲーション装置1は高速道路本線を走行する車列間のスペースに割り込み可能か判定する。具体的には例えば、以下の条件がすべて満たされているときCPU20はスペースに割り込み可能と判定する。
・自車速度が法定下限速度以上
・割り込みスペースの長さが十分長い。
・割り込みスペースの前後車両と自車との距離が十分大きい。
・割り込みスペース前方車両の絶対速度が自車速度より速いか、割り込みスペース前方車両の絶対速度と自車速度との差が十分小さい。
・割り込みスペース後方車両の絶対速度が自車速度より遅いか、割り込みスペース前方車両の絶対速度と自車速度との差が十分小さい。
【0041】
条件判定に用いる上記パラメータ(割り込みスペースの長さ等)は、レーダユニット32から出力される位置情報から算出することができる。また上記判定は予め決められた適正値(例えば、割り込みスペースの前後車両と自車との距離=50m)とレーダユニット32から出力される位置情報から算出した上記パラメータの値との差に基づいて行われる。この判定に用いられる適正値は、高速道路本線に進入する状況での適正な車両制御状態を示すパラメータである。適正値は制御プログラムのコードとして記述することも、地図DB42のリンク属性として登録しておくこともできる。
【0042】
高速道路本線を走行する車列間のスペースに割り込み可能である場合、ナビゲーション装置1は、高速道路本線への進入を促す操作案内を出力する(ステップS216)。具体的には例えばCPU20は高速道路本線側に舵を取ることを促す矢印をディスプレイ12に表示したり、「割り込み可能です。本線に進入してください。」などの案内音声をスピーカ14から出力する。尚、操作案内は、適切な操作内容を具体的に案内する内容(例えば「右にハンドルを少し切ってください。」)であってもよいし、適切な操作を促すための状況説明(例えば「割り込み可能です。」)であってもよい。
【0043】
加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更され、合流舵角が維持されている場合(ステップS208で肯定判定された場合)、前述したステップS214と同様にナビゲーション装置1は高速道路本線を走行する車列間のスペースに割り込み可能か判定する(ステップS220)。
【0044】
合流舵角が維持されている状態でスペースに割り込み可能である場合、ナビゲーション装置1は割り込み可能な状況であることを提示する案内(この案内も操作案内である。)を出力する(ステップS222)。具体的には例えば、CPU20は、「このまま割り込めます。」などの案内音声をスピーカ14から出力する。
【0045】
合流舵角が維持されている状態でスペースに割り込み可能でない場合、ナビゲーション装置1は衝突警告の出力を開始する(ステップS224)。具体的にはCPU20はスピーカ14から警報音や警告音声(例えば「危険です。加速レーンに戻ってください。」)を出力し始めたり、ディスプレイ12の画面を点滅させ始めたりする。
【0046】
ナビゲーション装置1は、自車が加速レーンに戻るまで衝突警告の出力を繰り返す(ステップS226、S228)。具体的には例えばCPU20は、カメラユニット30が出力している路面画像や、舵角センサ24が出力している舵角情報を解析することにより、レーンマーカや舵角を追跡し、自車が加速レーンに戻った状態を検出する。
【0047】
自車が加速レーンに戻ると、ナビゲーション装置1は衝突警告の出力回数と出力時間とを更新する(ステップS230)。具体的にはCPU20は、図4に示す処理が起動されてから終了するまで、すなわち1回の高速道路進入について、衝突警告の出力頻度としての出力回数及び出力時間を累積加算する。出力時間は衝突警告の出力開始(ステップS224)から衝突警告の出力停止(ステップS228)までの時間である。衝突警告の出力回数は、出力開始回数である。例えば、ドライバが本線に進入しようとするたびに失敗して加速レーンに戻り、3回目で本線に進入できたとし、1回目と2回目に2秒間づつ衝突警告が出力されたとすると、累積される警告の出力回数は2回で、累積される警告の出力時間は4秒間になる。衝突警告の出力回数及び出力時間は、車両が高速道路本線に進入する状況でのドライバの運転技能を表している。
【0048】
ステップS234では、ナビゲーション装置1は合流が完了したか判定する。具体的にはCPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいてレーンマークを追跡して自車が本線を走行しているかを判定したり、レーダユニット32から出力される近傍車両の位置情報に基づいて高速道路本線の車列に入っているかを判定する。
合流が完了すると、ナビゲーション装置1は操作支援モードでの操作案内を終了する。
【0049】
2.警告モードでの操作案内
次にナビゲーション装置1が前述したステップS104の処理でドライバの運転技能が低くないと判定した場合に実行される処理(ステップS108)について説明する。
図7はステップS108の処理の流れを示すフローチャートである。図4に示した処理と同一の処理については同一の符号を付している。警告モードでは、ナビゲーション装置1は高速道路本線への進入をドライバに促す操作案内を出力せず、衝突の危険がある場合に警告を出力するだけである。尚、警告モードでも操作支援モードで画面に表示する操作案内を画面に表示してもよい。すなわち、警告モードと操作支援モードでの操作案内の態様をどのように変えるかは任意である。同じ状況下では警告モードの方が操作支援モードよりも操作案内の頻度が低く、操作案内の注意喚起度が低いことが望ましい。
【0050】
3.運転技能の学習
次に車両が高速道路本線への進入を完了したときにナビゲーション装置1が実行する、ドライバの運転技能の学習処理(ステップS110)について説明する。
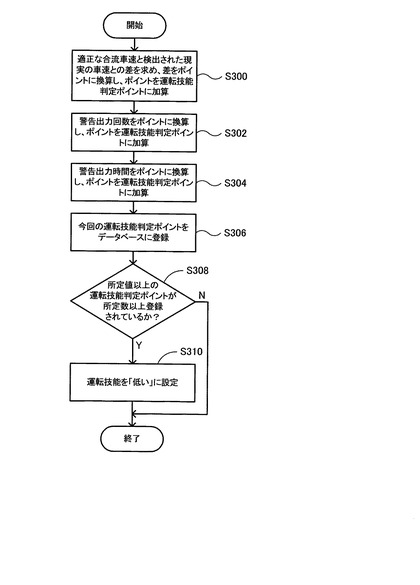
図8はステップS110の処理の流れを示すフローチャートである。
ステップS300では、ナビゲーション装置1は、適正な合流車速と検出された現実の車速との差を求め、差をポイントに変換し、ポイントを運転技能判定ポイントに加算する。具体的にはCPU20は、合流舵角に変更されたときに前述したステップS218で検出された車速と適正な合流車速との差を求める。適正な合流車速は、例えば前述したステップS210の加減速案内で求めた、割り込みスペースに安全に進入するための適正な車速である。適正な合流車速を予め決めた特定値(例えば25m/s)としてもよい。次にCPU20は、適正な合流車速と検出された現実の車速との差を段階的な評価ポイントに換算し、運転技能判定ポイントに加算する。例えば、適正な合流車速よりも現実の合流車速が10m/s以上遅ければ、5m/s遅くなる毎に運転技能判定ポイントに1ポイント加算する。運転技能判定ポイントは高速道路本線への進入毎に0にリセットされ、ポイントが多いほど低い運転技能を表すものである。
【0051】
ステップS302では、ナビゲーション装置1は、警告出力回数をポイントに換算し、ポイントを運転技能判定ポイントに加算する。具体的にはCPU20は、前述したステップS230で累積加算された警告出力回数の1回を1ポイントに換算し、運転技能判定ポイントに加算する。もちろん、警告出力回数を重み付けして評価してもよい。
【0052】
ステップS304では、ナビゲーション装置1は、警告出力時間をポイントに換算し、ポイントを運転技能判定ポイントに換算する。具体的にはCPU20は、前述したステップS232で累積加算された警告出力時間1秒を1ポイントに換算し、運転技能判定ポイントに加算する。もちろん警告出力時間を重み付けして評価しても良い。
【0053】
ステップS306では、ナビゲーション装置1は、今回の運転技能判定ポイントをデータベースに登録する。具体的には例えばCPU20は、高速道路本線に進入した直近の状況について前述のように加算された運転技能判定ポイントを状況(例えば、高速道路合流、位置、地理的形状)、日時等と関連付けてフラッシュメモリ18又はHDD16に保存する。
【0054】
ステップS308では、ナビゲーション装置1は、高速道路本線に進入した状況について所定値以上の運転技能判定ポイントが所定数以上データベースに登録されているか判定する。すなわち、ナビゲーション装置1は、高速道路本線に進入する状況におけるドライバの運転技能を判定する。肯定判定の場合には運転技能を「低い」に設定する(ステップS310)。具体的には、CPU20は状況(例えば高速道路合流)と運転技能判定ポイントを検索キーにしてデータベースを検索し、検索条件に合致するレコードの数を取得し、その数が所定値以上であるか判定する。尚、運転技能をどのような形態で記録するかは任意であり、例えば毎回二値形式でデータベースに登録しても良いし、状況毎に運転技能が二値で更新されるテーブルで運転形態を記録しても良い。また、どのような場合に運転技能が低いと判定するかも任意であり、例えば特定状況についてデータベースに登録されている運転技能判定ポイントの総和が所定値以上で有れば運転技能が低いと判定してよい。また、ナビゲーション装置1はドライバ毎に運転技能を判定することも可能である。この場合、ドライバを特定するための処理(例えば乗車時にドライバにIDを入力させる。)が必要になり、ナビゲーション装置1はドライバと運転技能判定ポイントとを関連付けて記憶する必要がある。また、ナビゲーション装置1は時間帯毎に運転技能を判定することも可能である。また、ナビゲーション装置1は走行経験のない地点で車両が置かれる状況についてその状況におけるドライバの運転技能を予測することもできる。具体的には例えば、位置と無関係に「高速道路合流直前」という状況や「本線と平行でない加速レーンから高速道路に進入する直前」という状況について運転技能を学習していれば、走行経験のない高速道路の加速レーンを走行している状況でもドライバの運転技能に応じた適切な操作案内を出力することができる。
【0055】
以上説明したように、高速道路本線に進入する状況におけるドライバの運転技能を学習し、その後ふたたび高速道路本線に進入する状況では、学習した運転技能に応じて操作案内の態様を変えることにより、運転技能の高いドライバにとって煩わしく感じられる操作案内がナビゲーション装置1から出力されることを防止でき、また運転技能の低いドライバには安全運転を支援するきめ細かな操作案内を提供することができる。
【0056】
以上、本発明を車両が高速道路本線に合流する状況での合流支援に適用した実施例について説明したが、本発明は例えば車両が駐車枠に進入する状況での駐車支援、車両が車線変更する状況での車線変更支援、車両が右折する状況での右折支援、車両が坂道発進する状況での坂道発進支援、車両が交通量の多い道路でUターンする状況でのUターン支援等にも適用することもできる。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施例に係るフローチャート。
【図2】本発明の一実施例に係るブロック図。
【図3】本発明の一実施例に係るブロック図。
【図4】本発明の一実施例に係るフローチャート。
【図5】本発明の一実施例に係る画面を示す模式図。
【図6】本発明の一実施例に係る模式図。
【図7】本発明の一実施例に係るフローチャート。
【図8】本発明の一実施例に係るフローチャート。
【符号の説明】
【0058】
1:ナビゲーション装置、12:ディスプレイ(案内手段)、14:スピーカ(案内手段)、23:ETCユニット(状況検出手段)、24:舵角センサ、26:方位センサ(状況検出手段)、28:車速センサ(状況検出手段)、30:カメラユニット(状況検出手段)、30:GPSユニット(状況検出手段)、32:レーダユニット、34:カメラユニット(状況検出手段)、48:状況判定モジュール(状況判定手段)、50:状態判定モジュール(現実状態検出手段)、52:経路探索モジュール、54:案内モジュール(適正状態特定手段、案内手段)、54:設定モジュール、56:学習モジュール(学習手段)、56:案内モジュール(案内手段)
【技術分野】
【0001】
本発明はナビゲーション装置及びナビゲーション方法に関し、特に運転技能に応じた操作案内をドライバに提供するナビゲーション装置及びナビゲーション方法に関する。
【背景技術】
【0002】
特許文献1には、各道路の走行回数に応じて各道路の音声案内を簡略化するナビゲーション装置が開示されている。ドライバは、走行回数が多い道路については道案内を必要としないため、特許文献1に開示されたナビゲーション装置では、不必要な道案内がナビゲーション装置から出力されることによってドライバが感ずる不快感を軽減することができる。
【0003】
ところで、道路を良く知っていても、円滑にその道路を通行するための運転支援が必要とされる場合がある。例えば、車両が高速道路本線に進入する状況では、運転技能が低いドライバに適切な操作案内が提供されることが望まれる。また例えば、ドライバが車線変更や駐車をする状況では、車線変更技能や駐車技能が低いドライバに適切な操作案内が提供されることが望まれる。
【0004】
【特許文献1】特開2003−57059号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、前述の要請に鑑みて創作されたものであって、運転技能に応じた適切な操作案内をドライバに提供できるナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するためのナビゲーション装置は、車両が予め決められた特定状況にあると判定する状況判定手段と、前記特定状況における現実の車両制御状態を検出する現実状態判定手段と、前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、を備える。
予め決められた特定状況にはその状況に応じた適正な車両制御状態がある。例えば自車が走行する隣接レーンに併走車両がいる場合に適切なのはレーンを維持する舵角制御である。このため、ナビゲーション装置は、特定の状況における現実の車両制御状態を検出し、その状況における適正な車両制御状態を特定すると、現実の車両制御状態と適正な車両制御状態とに基づいて、その状況におけるドライバの運転技能を学習することができる。ナビゲーション装置は、このようにして学習した特定状況におけるドライバの運転技能に応じた操作案内を、後に発生するその特定状況で出力することにより、運転技能に応じた適切な操作案内をドライバに提供することができる。
【0007】
(2)前記ナビゲーション装置は、前記現実の車両制御状態と前記適正な適正車両制御状態とに基づいて前記特定状況で警告を出力する警告手段をさらに備えてもよい。前記学習手段は、前記警告の出力頻度に基づいて前記運転技能を学習してもよい。
ナビゲーション装置は、特定状況における適正な車両制御状態と現実の車両制御状態とに基づいて警告を出力することにより、危険回避を支援する警告をドライバに提供することができる。特定状況においてそのように出力される警告の頻度とドライバの運転技能とは強く相関するため、ナビゲーション装置は警告の出力頻度に基づいてドライバの運転技能を正しく学習することができる。
【0008】
(3)前記状況判定手段は、前記車両がある状況を検出する状況検出手段によって検出された前記状況に基づいて前記車両が前記特定状況にあると判定してもよい。
ナビゲーション装置は、車両がある状況を検出することにより、車両が予め決められた特定状況にあることを自動判定することができる。
【0009】
(4)前記状況判定手段は、前記状況検出手段によって検出された前記状況に基づいて高速道路本線に進入するという前記特定状況にあると判定してもよい。
高速道路本線に進入しようとする状況ではドライバは恐怖感や緊張感を持ちやすいので、運転技能の低いドライバに対しては適切な操作案内が提供されることが望ましい。このため、ナビゲーション装置は、高速道路本線に進入しようとする状況を判定し、その状況で運転技能に応じた操作案内をすることが望ましい。
【0010】
(5)前記現実状態検出手段は、舵角を含む前記現実の車両制御状態を検出してもよい。
【0011】
(6)前記現実状態検出手段は、車速を含む前記現実の車両制御状態を検出してもよい。
【0012】
(7)前記現実状態検出手段は、近傍車両に対する前記自車の距離を含む前記現実の車両制御状態を検出してもよい。
【0013】
(8)上記目的を達成するためのナビゲーション方法は、車両が予め決められた特定状況にあると判定し、前記特定状況における現実の車両制御状態と適正な車両制御状態とを判定し、前記現実の車両制御状態と前記適正な車両制御状態とを比較した結果に基づいて前記特定状況におけるドライバの運転技能を学習し、学習された前記運転技能に応じた操作案内を前記特定状況で出力する。
特定の状況における現実の車両制御状態を判定し、その状況における適正な車両制御状態を特定すると、現実の車両制御状態と適正な車両制御状態とに基づいて、その状況におけるドライバの運転技能を学習することができる。このようにして学習した特定状況におけるドライバの運転技能に応じた操作案内を、後に発生するその特定状況で出力することにより、運転技能に応じた適切な操作案内をドライバに提供することができる。
【0014】
尚、請求項に記載された方法の各動作の順序は、技術上の阻害要因がない限り、記載順に限定されるものではなく、どのような順番で実行されてもよく、また同時に実行されてもよい。また、本発明に備わる複数の手段の各機能は、構成自体で機能が特定されるハードウェア資源、プログラムにより機能が特定されるハードウェア資源、又はそれらの組み合わせにより実現される。また、これら複数の手段の各機能は、各々が物理的に互いに独立したハードウェア資源で実現されるものに限定されない。また、本発明は、プログラムの発明としても、そのプログラムを記録した記録媒体の発明としても特定することができる。
【発明を実施するための最良の形態】
【0015】
以下、高速道路本線への合流支援に本発明を適用した実施例に基づいて本発明の実施の形態を説明する。
(ナビゲーション装置の構成)
図2は本発明の一実施例によるナビゲーション装置1のハードウェア構成を示すブロック図である。ナビゲーション装置1は自動車、オートバイ等の車両に搭載される。
【0016】
ハードディスク装置(HDD)16には、地図データベース(地図DB)が格納されている。自車周辺の地図情報は、ナビゲーション装置が交通情報センタと通信することにより取得してもよい。
状況状況検出手段としての方位センサ26は、推測航法に用いる地磁気センサ、左右車輪速度差センサ、振動ジャイロ、ガスレートジャイロ、光ファイバジャイロ等で構成されている。
【0017】
状況検出手段及び現実状態検出手段としての車速センサ28は、自車速度の検出と推測航法に用いられ、スピードメータに使用される車速センサである。車速を時間で積分することにより、走行距離が求まる。車速センサは、車輪回転速度を用いた車速センサの他、電波や超音波を用いたドップラ対地車速センサ、光と空間フィルタを用いた対地車速センサ等で構成することができる。
【0018】
状況検出手段としてのGPSユニット30は、衛星航法に用いる3個又は4個の衛星から送られてくる軌道データを受信するアンテナ、自車の現在地の緯度経度データを出力するためのASIC等で構成される。自車の現在地の緯度経度データと地図DBに登録されている高速道路合流点に対応するノードの緯度経度属性とに基づいて、自車が高速道路に間もなく進入する状況にあることを検出することができる。
【0019】
状況検出手段及び現実状態検出手段としてのレーダユニット32は、光レーダ、電波レーダ等で構成され、近傍車両の自車に対する位置を検出する。近傍車両の自車に対する変位を時間で微分することにより、近傍車両の進行方向及び速度を求めることができる。
状況検出手段としてのカメラユニット34は、レーンマーカ認識に用いるCCDカメラ、CMOSカメラ等のディジタルカメラで構成されている。カメラユニット34は、自車の前方又は後方の路面画像を撮像することにより、自車の走行レーンを特定するためのレーンマークを撮像することができ、自車の側方を撮像することにより、高速道路本線への合流禁止区間を示すゼブラゾーンや併走車両を撮像することができる。誘導ケーブル方式、磁気マーカ方式、リフレクタ方式に対応したレーンマーカを認識することにより、自車の走行レーンを検出してもよい。尚、カメラユニット34は現実状態検出手段としても機能しうる。
【0020】
現実状態検出手段としての舵角センサ24は、磁気、光等を用いた非接触方式の回転角センサ等で構成され、ステアリングホイールの絶対舵角を検出する。絶対舵角を追跡することにより、加速レーンから本線に進入するタイミングや、本線への合流が完了するタイミングや、本線に合流しようとした後に加速レーンに戻る衝突回避操作を検出することができる。尚、舵角センサ24は、状況検出手段としても機能しうる。
状況検出手段としてのETCユニット23は、有料道路の出入口料金所に設けられた通信装置と通信するためのアンテナ及びASICを備える。ETCユニット23は、有料道路の走行区間に応じた課金額情報を高速道路の出入り口料金所に設けられた通信装置から取得し、前払い情報から課金額を引き算する。ETCユニット23と高速道路の入口料金所との通信を検出することにより、自車が高速道路本線に間もなく進入する状況にあることを検出することができる。
【0021】
案内手段を構成するディスプレイ12は、操作案内や地図や走行経路案内の表示に用いるFPD(Flat Panel Display)、HUD(Head Up Display)等で構成される。
案内手段を構成するスピーカ14は、操作や走行経路の案内音声の出力に用いられる。スピーカ14はオーディオスピーカと共用してもよいし、ナビゲーション専用でもよい。
インタフェース17は、AD変換器、DA変換器等で構成され、上述した各種の入出力ユニットとCPU20との間で信号形態の変換を行う。
RAM22は、CPU20で処理されるデータやプログラムを一時的に格納する。
【0022】
フラッシュメモリ18は、CPU20で実行される制御プログラムを格納しているEEPROMなどの不揮発性のメモリである。またフラッシュメモリ18にはナビゲーション装置1への電源供給が遮断されている状態に保持しなければならない情報が格納される。このような情報としては、案内モードの設定やドライバの運転技能等がある。制御プログラムやこのような情報はHDD16に格納してもよい。制御プログラム及び地図DBは、所定のサーバからのネットワークを介したダウンロード、図示しないリムーバブルメモリ等のコンピュータ読み取り可能な記憶媒体からの読み出し等によってもフラッシュメモリ18又はHDD16に格納することができる。
CPU20は、制御プログラムを実行することによりナビゲーション装置1の各部を制御する。
【0023】
図3はナビゲーション装置1の制御プログラムのソフトウェア構成を示すブロック図である。
地図DB42は、グラフ形式で地図をデジタル表現した情報で構成されるデータベースであって、道路網上の自車の位置の検出、レーン数の検出、高速道路への合流態様の案内などに用いられる。地図DB42では、交差点、合流点、曲がり点、行き止まり点などはノードであり、道路はノードとノードとを結ぶリンクとして定義されている。また各リンクには距離、制限速度、レーン数、道路種別(高速道路、一般道など)などが属性情報として定義され、各ノードには信号の有無などが属性情報として定義されている。
【0024】
自車位置検出モジュール44は、CPU20を状況検出手段として機能させるプログラム部品である。自車位置検出モジュール44は、地図DB42を用いてマップマッチングによる補正を行いながら、GPSユニット30から入力される自車の現在地の緯度経度データと、車速センサ28から入力される走行速度と、方位センサ26から入力される進行方位とに基づいて自車の道路網上の位置を算出する。
【0025】
状況判定モジュール48は、CPU20を状況判定手段として機能させるプログラム部品である。状況判定モジュール48は、道路網上の自車の位置、ETCユニット23と高速道路の入口料金所との通信タイミング、カメラユニット34から出力される画像によって認識するゼブラゾーンの位置などに基づいて自車が高速道路本線に進入する状況にあると判定する。尚、車両がおかれている状況を判定する要素としては、これらの他、道路の傾斜角、外気温、道路の明るさ、降雨量、道路幅員、レーン数、カーブの曲率などがある。
【0026】
状態判定モジュール50は、CPU20を現実状態検出手段として機能させるプログラム部品である。状態判定モジュール50は、カメラユニット34から出力される画像とレーダユニット32から出力される障害物(車両、壁など)の位置情報とに基づいて自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置等を認識し、車速センサ28から出力される車速情報と舵角センサ24から出力される舵角情報とに基づいて自車の車速及び舵角を認識する。自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置、自車の車速、自車の舵角等は、自車が置かれている状況に対してどのような車両制御が行われているかを示しており、現実の車両制御状態を表すパラメータである。尚、車両制御状態を表すパラメータとしては、これらの他、アクセルペダル等のペダル類の踏み込み量、シフトレバーやパーキングレバーの位置、方位センサの出力、エンジン回転数、障害物と自車との距離等がある。
【0027】
案内モジュール56は、CPU20を適正状態特定手段及び案内手段として機能させるプログラム部品である。案内モジュール56は、単語、節などの文章要素毎の音声データを組み合わせて案内音声データを生成して案内音声や警告音声をスピーカ14に出力したり、高速道路の合流地点の路面を表す図形画像と合流経路を示す矢印とを合成表示する。案内モジュール56は、自車に対する近傍車両の位置及び速度、自車に対するレーンマークの位置、自車に対するゼブラゾーンの位置、自車の車速、自車の舵角等で構成される現実の車両制御状態と、高速道路本線進入時の車両制御状態について予め決められた適正な車両制御状態とを比較した結果に基づいてドライバの運転技能と案内モードに応じた操作案内データ及び警告データを生成する。尚、操作案内は画像及び音声の他、ハンドル、アクセルペダル、シフトレバー等の振動等によってもドライバに提供することができる。
【0028】
学習モジュール52は、CPU20を学習手段として機能させるプログラム部品である。学習モジュール52は、高速道路本線の進入時に現実に起こった車両制御状態と高速道路本線の進入時の適正な車両制御状態とを比較した結果や、高速道路本線の進入時に出力された警告の出力頻度等に基づいて、高速道路本線に進入時のドライバの運転技能を判定する。ドライバの運転技能は、「高速道路本線に進入する」、「縦列駐車する」、「レーンチェンジする」というような位置と無関係な状況毎に判定しても良いし、「○○インターチェンジで高速道路本線に進入する」、「○○パーキングの○○番の枠に縦列駐車する」というような特定の位置でドライバがおかれる状況毎に判定しても良い。さらに、加速レーンの長さ、加速レーン形状(本線と平行かそうでないか)、合流地点の本線形状(カーブ、車線数)といった詳細な地形的特徴毎に状況を区分してドライバの運転技能を判定しても良い。
設定モジュール54は、ドライバによる案内モードの設定操作を受け付け、設定操作に応じた案内モードを設定する。
【0029】
(ナビゲーション装置の作動)
図1はナビゲーション装置1の処理の流れを示すフローチャートである。図1に示す処理は、CPU20が制御プログラムを実行することによって走行中に繰り返し実行される。
ステップS100では、ナビゲーション装置1は自車が高速道路に進入する直前であるか判定する。具体的には、道路網上の自車の位置、高速道路入口料金所の通過、ドライバによる高速道路進入支援指示の入力等によってCPU20は自車が高速道路に進入する直前であると判定する。
【0030】
ステップS102では、ナビゲーション装置1はドライバによって設定された案内モードを判定する。具体的には、CPU20は案内モードの設定を読み込み、衝突回避警告だけが出力される警告モードに設定されているか高速道路本線に進入するために必要な操作案内等が出力される操作支援モードに設定されているかを判定する。
【0031】
警告モードが設定されている場合、ナビゲーション装置1はドライバの運転技能が低いか判定する(ステップS104)。具体的には、ナビゲーション装置1が学習した過去に起こった現在と同じ状況におけるドライバの運転技能の設定をCPU20が読み込み、運転技能が低いかどうかを判定する。ドライバの運転技能が低い場合、警告モードが設定されていても操作支援モードと同一の案内及び警告が出力されるように、CPU20はステップS106の処理に進む。
ステップS106では、ナビゲーション装置1は操作支援モードで作動し、高速道路本線への合流態様を示す画像を表示し、必要に応じて、高速道路本線に進入するために必要な操作案内と警告を出力する。
【0032】
1.操作支援モードでの操作案内
図4は、ステップS106の処理の詳細を示すフローチャートである。
ステップS200では、ナビゲーション装置1は高速道路本線への合流態様をドライバに案内する。具体的には、CPU20は、ディスプレイ12の画面に自車がこれから進入する高速道路本線と加速レーンとの接続形態を示す画像(図5参照)を表示したり、「この先で高速道路の左車線に合流します。加速レーンが短いので加速レーン進入前にランプでの加速が必要になります。」というような案内音声を出力する。
【0033】
ステップS202では、ナビゲーション装置1は高速道路本線を検出するまで高速道路本線の検出処理を繰り返す。具体的にはCPU20はカメラユニット34から出力される自車の側方又は前方の動画像等に基づいて高速道路本線のレーンマークの検出処理を繰り返す。例えば図6に示す合流形態では、本線66と加速レーン60とを隔てる壁80を通過すると、自車74の斜め前方を撮像しているカメラユニット34によって高速道路本線66の左レーン62と右レーン64とを区切るレーンマーク70が撮像され、その結果、高速道路本線66が検出される。
【0034】
ステップS204では、ナビゲーション装置1は高速道路本線を走行している車列の割り込みスペースを認識する。具体的にはCPU20はレーダユニット32から出力される近傍車両の位置情報に基づいて高速道路本線を走行している車列の割り込みスペースの位置・速度・長さを検出する。図6を参照しながらより詳細に説明すると次のとおりである。レーダユニット32からは高速道路本線66の左レーン62を走行する車両72と車両78の自車74に対する位置P1、P2を示す位置情報が出力される。割り込みスペースの位置は、先行車両72の位置P1又は後続車両78の位置P2として求めることができる。割り込みスペースの速度は、割り込みスペース前方の車両の速度又は割り込みスペース後方の車両の速度として求めることができ、それらの車両の位置を時間で微分することによって求まる。割り込みスペースの長さは、位置P2を始点としP1を終点とするベクトルSの大きさとして求めることができる。
【0035】
ステップS206では、ナビゲーション装置1は加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されたか判定する。具体的には例えばCPU20は、舵角センサ24の出力に基づいて、舵角が所定時間内に直進舵角から予め決められた角度以上変動したとき、加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定する。また例えばCPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいて、本線と加速レーンとを区切るレーンマークを自車が跨ぎはじめたり、自車の進行方向とレーンマークの方向のずれが所定時間内に所定値より大きく変動したとき、加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定する。CPU20が加速レーンを維持する舵角が高速道路本線に合流するための舵角に変更されたと判定したタイミングは、自車が高速道路の本線車線に進入するタイミングと判定することができる。
【0036】
加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更された場合、ナビゲーション装置1は自車の車速を検出する(ステップS218)。この処理は高速道路の本線車線に進入する状況での適正な車速と、そのときの現実の車速とを比較することによってドライバの運転技能を判定するために実施される。また、このとき、ウィンカーが点滅しているかどうかを判定し、この判定結果を運転技能の判定に用いてもよい。
【0037】
ステップS206で加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されなかったと判定された場合、ナビゲーション装置1は合流舵角が維持されているか判定する(ステップS208)。当然のことながら、加速レーンを維持している場合には、ステップS206で加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更されなかったと判定され、ステップS208でも合流舵角が維持されていないと判定される。合流舵角に変更した後にそのまま高速道路本線に合流しようとしている場合にはナビゲーション装置1は合流舵角が維持されていると判定する。具体的には例えば、CPU20は、舵角センサ24の出力に基づいて、高速道路本線に合流するための舵角に変更された後の舵角変動幅が所定範囲内であれば合流舵角が維持されていると判定する。また例えば、CPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいて、自車の進行方向とレーンマークの方向のずれが所定範囲内であれば合流舵角が維持されていると判定する。
【0038】
合流舵角が維持されていない場合、ナビゲーション装置1は加速又は減速を促す案内を出力する(ステップS210)。具体的には例えば、CPU20は、車速センサ28の出力から自車の速度を取得し、現在進入しようとしている高速道路本線の法定速度を地図DB42から取得し、自車速度と、高速道路本線の法定速度と、高速道路本線を走行している車列の割り込みスペースの位置・速度・長さとから、割り込みスペースに安全に進入するための適正な車速を算出し、算出した適正車速と現在の自車速度との差に応じて加速又は減速が必要かどうかを判定する。CPU20は加速又は減速が必要と判定した場合、加速又は減速を促す案内音声をスピーカ14から出力し、加速又は減速を促す案内画面をディスプレイ12に表示する。
【0039】
ステップ212では、ナビゲーション装置1は自車がゼブラゾーンを通過したか判定する。具体的にはCPU20は、カメラユニット34から出力される自車の前方、側方又は後方の路面画像に基づいてゼブラゾーンを検出し追跡することにより、自車がゼブラゾーンを通過したか判定する。ゼブラゾーンを通過するまでは、加速レーンから高速道路本線に安全に進入できる状況にならない。このため、ナビゲーション装置1はゼブラゾーンを通過する前に高速道路本線に進入するための車両制御状態を検出した場合に警告を出力してもよい。
【0040】
ステップS214では、ナビゲーション装置1は高速道路本線を走行する車列間のスペースに割り込み可能か判定する。具体的には例えば、以下の条件がすべて満たされているときCPU20はスペースに割り込み可能と判定する。
・自車速度が法定下限速度以上
・割り込みスペースの長さが十分長い。
・割り込みスペースの前後車両と自車との距離が十分大きい。
・割り込みスペース前方車両の絶対速度が自車速度より速いか、割り込みスペース前方車両の絶対速度と自車速度との差が十分小さい。
・割り込みスペース後方車両の絶対速度が自車速度より遅いか、割り込みスペース前方車両の絶対速度と自車速度との差が十分小さい。
【0041】
条件判定に用いる上記パラメータ(割り込みスペースの長さ等)は、レーダユニット32から出力される位置情報から算出することができる。また上記判定は予め決められた適正値(例えば、割り込みスペースの前後車両と自車との距離=50m)とレーダユニット32から出力される位置情報から算出した上記パラメータの値との差に基づいて行われる。この判定に用いられる適正値は、高速道路本線に進入する状況での適正な車両制御状態を示すパラメータである。適正値は制御プログラムのコードとして記述することも、地図DB42のリンク属性として登録しておくこともできる。
【0042】
高速道路本線を走行する車列間のスペースに割り込み可能である場合、ナビゲーション装置1は、高速道路本線への進入を促す操作案内を出力する(ステップS216)。具体的には例えばCPU20は高速道路本線側に舵を取ることを促す矢印をディスプレイ12に表示したり、「割り込み可能です。本線に進入してください。」などの案内音声をスピーカ14から出力する。尚、操作案内は、適切な操作内容を具体的に案内する内容(例えば「右にハンドルを少し切ってください。」)であってもよいし、適切な操作を促すための状況説明(例えば「割り込み可能です。」)であってもよい。
【0043】
加速レーンを維持する舵角が高速道路本線に合流するための合流舵角に変更され、合流舵角が維持されている場合(ステップS208で肯定判定された場合)、前述したステップS214と同様にナビゲーション装置1は高速道路本線を走行する車列間のスペースに割り込み可能か判定する(ステップS220)。
【0044】
合流舵角が維持されている状態でスペースに割り込み可能である場合、ナビゲーション装置1は割り込み可能な状況であることを提示する案内(この案内も操作案内である。)を出力する(ステップS222)。具体的には例えば、CPU20は、「このまま割り込めます。」などの案内音声をスピーカ14から出力する。
【0045】
合流舵角が維持されている状態でスペースに割り込み可能でない場合、ナビゲーション装置1は衝突警告の出力を開始する(ステップS224)。具体的にはCPU20はスピーカ14から警報音や警告音声(例えば「危険です。加速レーンに戻ってください。」)を出力し始めたり、ディスプレイ12の画面を点滅させ始めたりする。
【0046】
ナビゲーション装置1は、自車が加速レーンに戻るまで衝突警告の出力を繰り返す(ステップS226、S228)。具体的には例えばCPU20は、カメラユニット30が出力している路面画像や、舵角センサ24が出力している舵角情報を解析することにより、レーンマーカや舵角を追跡し、自車が加速レーンに戻った状態を検出する。
【0047】
自車が加速レーンに戻ると、ナビゲーション装置1は衝突警告の出力回数と出力時間とを更新する(ステップS230)。具体的にはCPU20は、図4に示す処理が起動されてから終了するまで、すなわち1回の高速道路進入について、衝突警告の出力頻度としての出力回数及び出力時間を累積加算する。出力時間は衝突警告の出力開始(ステップS224)から衝突警告の出力停止(ステップS228)までの時間である。衝突警告の出力回数は、出力開始回数である。例えば、ドライバが本線に進入しようとするたびに失敗して加速レーンに戻り、3回目で本線に進入できたとし、1回目と2回目に2秒間づつ衝突警告が出力されたとすると、累積される警告の出力回数は2回で、累積される警告の出力時間は4秒間になる。衝突警告の出力回数及び出力時間は、車両が高速道路本線に進入する状況でのドライバの運転技能を表している。
【0048】
ステップS234では、ナビゲーション装置1は合流が完了したか判定する。具体的にはCPU20は、カメラユニット34から出力される前方又は後方の路面画像に基づいてレーンマークを追跡して自車が本線を走行しているかを判定したり、レーダユニット32から出力される近傍車両の位置情報に基づいて高速道路本線の車列に入っているかを判定する。
合流が完了すると、ナビゲーション装置1は操作支援モードでの操作案内を終了する。
【0049】
2.警告モードでの操作案内
次にナビゲーション装置1が前述したステップS104の処理でドライバの運転技能が低くないと判定した場合に実行される処理(ステップS108)について説明する。
図7はステップS108の処理の流れを示すフローチャートである。図4に示した処理と同一の処理については同一の符号を付している。警告モードでは、ナビゲーション装置1は高速道路本線への進入をドライバに促す操作案内を出力せず、衝突の危険がある場合に警告を出力するだけである。尚、警告モードでも操作支援モードで画面に表示する操作案内を画面に表示してもよい。すなわち、警告モードと操作支援モードでの操作案内の態様をどのように変えるかは任意である。同じ状況下では警告モードの方が操作支援モードよりも操作案内の頻度が低く、操作案内の注意喚起度が低いことが望ましい。
【0050】
3.運転技能の学習
次に車両が高速道路本線への進入を完了したときにナビゲーション装置1が実行する、ドライバの運転技能の学習処理(ステップS110)について説明する。
図8はステップS110の処理の流れを示すフローチャートである。
ステップS300では、ナビゲーション装置1は、適正な合流車速と検出された現実の車速との差を求め、差をポイントに変換し、ポイントを運転技能判定ポイントに加算する。具体的にはCPU20は、合流舵角に変更されたときに前述したステップS218で検出された車速と適正な合流車速との差を求める。適正な合流車速は、例えば前述したステップS210の加減速案内で求めた、割り込みスペースに安全に進入するための適正な車速である。適正な合流車速を予め決めた特定値(例えば25m/s)としてもよい。次にCPU20は、適正な合流車速と検出された現実の車速との差を段階的な評価ポイントに換算し、運転技能判定ポイントに加算する。例えば、適正な合流車速よりも現実の合流車速が10m/s以上遅ければ、5m/s遅くなる毎に運転技能判定ポイントに1ポイント加算する。運転技能判定ポイントは高速道路本線への進入毎に0にリセットされ、ポイントが多いほど低い運転技能を表すものである。
【0051】
ステップS302では、ナビゲーション装置1は、警告出力回数をポイントに換算し、ポイントを運転技能判定ポイントに加算する。具体的にはCPU20は、前述したステップS230で累積加算された警告出力回数の1回を1ポイントに換算し、運転技能判定ポイントに加算する。もちろん、警告出力回数を重み付けして評価してもよい。
【0052】
ステップS304では、ナビゲーション装置1は、警告出力時間をポイントに換算し、ポイントを運転技能判定ポイントに換算する。具体的にはCPU20は、前述したステップS232で累積加算された警告出力時間1秒を1ポイントに換算し、運転技能判定ポイントに加算する。もちろん警告出力時間を重み付けして評価しても良い。
【0053】
ステップS306では、ナビゲーション装置1は、今回の運転技能判定ポイントをデータベースに登録する。具体的には例えばCPU20は、高速道路本線に進入した直近の状況について前述のように加算された運転技能判定ポイントを状況(例えば、高速道路合流、位置、地理的形状)、日時等と関連付けてフラッシュメモリ18又はHDD16に保存する。
【0054】
ステップS308では、ナビゲーション装置1は、高速道路本線に進入した状況について所定値以上の運転技能判定ポイントが所定数以上データベースに登録されているか判定する。すなわち、ナビゲーション装置1は、高速道路本線に進入する状況におけるドライバの運転技能を判定する。肯定判定の場合には運転技能を「低い」に設定する(ステップS310)。具体的には、CPU20は状況(例えば高速道路合流)と運転技能判定ポイントを検索キーにしてデータベースを検索し、検索条件に合致するレコードの数を取得し、その数が所定値以上であるか判定する。尚、運転技能をどのような形態で記録するかは任意であり、例えば毎回二値形式でデータベースに登録しても良いし、状況毎に運転技能が二値で更新されるテーブルで運転形態を記録しても良い。また、どのような場合に運転技能が低いと判定するかも任意であり、例えば特定状況についてデータベースに登録されている運転技能判定ポイントの総和が所定値以上で有れば運転技能が低いと判定してよい。また、ナビゲーション装置1はドライバ毎に運転技能を判定することも可能である。この場合、ドライバを特定するための処理(例えば乗車時にドライバにIDを入力させる。)が必要になり、ナビゲーション装置1はドライバと運転技能判定ポイントとを関連付けて記憶する必要がある。また、ナビゲーション装置1は時間帯毎に運転技能を判定することも可能である。また、ナビゲーション装置1は走行経験のない地点で車両が置かれる状況についてその状況におけるドライバの運転技能を予測することもできる。具体的には例えば、位置と無関係に「高速道路合流直前」という状況や「本線と平行でない加速レーンから高速道路に進入する直前」という状況について運転技能を学習していれば、走行経験のない高速道路の加速レーンを走行している状況でもドライバの運転技能に応じた適切な操作案内を出力することができる。
【0055】
以上説明したように、高速道路本線に進入する状況におけるドライバの運転技能を学習し、その後ふたたび高速道路本線に進入する状況では、学習した運転技能に応じて操作案内の態様を変えることにより、運転技能の高いドライバにとって煩わしく感じられる操作案内がナビゲーション装置1から出力されることを防止でき、また運転技能の低いドライバには安全運転を支援するきめ細かな操作案内を提供することができる。
【0056】
以上、本発明を車両が高速道路本線に合流する状況での合流支援に適用した実施例について説明したが、本発明は例えば車両が駐車枠に進入する状況での駐車支援、車両が車線変更する状況での車線変更支援、車両が右折する状況での右折支援、車両が坂道発進する状況での坂道発進支援、車両が交通量の多い道路でUターンする状況でのUターン支援等にも適用することもできる。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施例に係るフローチャート。
【図2】本発明の一実施例に係るブロック図。
【図3】本発明の一実施例に係るブロック図。
【図4】本発明の一実施例に係るフローチャート。
【図5】本発明の一実施例に係る画面を示す模式図。
【図6】本発明の一実施例に係る模式図。
【図7】本発明の一実施例に係るフローチャート。
【図8】本発明の一実施例に係るフローチャート。
【符号の説明】
【0058】
1:ナビゲーション装置、12:ディスプレイ(案内手段)、14:スピーカ(案内手段)、23:ETCユニット(状況検出手段)、24:舵角センサ、26:方位センサ(状況検出手段)、28:車速センサ(状況検出手段)、30:カメラユニット(状況検出手段)、30:GPSユニット(状況検出手段)、32:レーダユニット、34:カメラユニット(状況検出手段)、48:状況判定モジュール(状況判定手段)、50:状態判定モジュール(現実状態検出手段)、52:経路探索モジュール、54:案内モジュール(適正状態特定手段、案内手段)、54:設定モジュール、56:学習モジュール(学習手段)、56:案内モジュール(案内手段)
【特許請求の範囲】
【請求項1】
車両が予め決められた特定状況にあると判定する状況判定手段と、
前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、
前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、
前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、
学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、
を備えるナビゲーション装置。
【請求項2】
前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況で警告を出力する警告手段をさらに備え、
前記学習手段は、前記警告の出力頻度に基づいて前記運転技能を学習する、
請求項1に記載のナビゲーション装置。
【請求項3】
前記状況判定手段は、前記車両がある状況を検出する状況検出手段によって検出された前記状況に基づいて前記車両が前記特定状況にあると判定する、
請求項1又は2に記載のナビゲーション装置。
【請求項4】
前記状況判定手段は、前記状況検出手段によって検出された前記状況に基づいて高速道路本線に進入するという前記特定状況にあると判定する、
請求項3に記載のナビゲーション装置。
【請求項5】
前記現実状態検出手段は、舵角を含む前記現実の車両制御状態を検出する、
請求項1〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記現実状態検出手段は、車速を含む前記現実の車両制御状態を検出する、
請求項1〜5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記現実状態判定手段は、近傍車両に対する前記自車の距離を含む前記現実の車両制御状態を検出する、
請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項8】
車両が予め決められた特定状況にあると判定し、
前記特定状況における現実の車両制御状態を検出し、
前記特定状況に応じた適正な車両制御状態を特定し、
前記現実の車両制御状態と適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習し、
学習された前記運転技能に応じた操作案内を前記特定状況で出力する、
ナビゲーション方法。
【請求項1】
車両が予め決められた特定状況にあると判定する状況判定手段と、
前記特定状況における現実の車両制御状態を検出する現実状態検出手段と、
前記特定状況に応じた適正な車両制御状態を特定する適正状態特定手段と、
前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習する学習手段と、
学習された前記運転技能に応じた操作案内を前記特定状況で出力する案内手段と、
を備えるナビゲーション装置。
【請求項2】
前記現実の車両制御状態と前記適正な車両制御状態とに基づいて前記特定状況で警告を出力する警告手段をさらに備え、
前記学習手段は、前記警告の出力頻度に基づいて前記運転技能を学習する、
請求項1に記載のナビゲーション装置。
【請求項3】
前記状況判定手段は、前記車両がある状況を検出する状況検出手段によって検出された前記状況に基づいて前記車両が前記特定状況にあると判定する、
請求項1又は2に記載のナビゲーション装置。
【請求項4】
前記状況判定手段は、前記状況検出手段によって検出された前記状況に基づいて高速道路本線に進入するという前記特定状況にあると判定する、
請求項3に記載のナビゲーション装置。
【請求項5】
前記現実状態検出手段は、舵角を含む前記現実の車両制御状態を検出する、
請求項1〜4のいずれか一項に記載のナビゲーション装置。
【請求項6】
前記現実状態検出手段は、車速を含む前記現実の車両制御状態を検出する、
請求項1〜5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記現実状態判定手段は、近傍車両に対する前記自車の距離を含む前記現実の車両制御状態を検出する、
請求項1〜6のいずれか一項に記載のナビゲーション装置。
【請求項8】
車両が予め決められた特定状況にあると判定し、
前記特定状況における現実の車両制御状態を検出し、
前記特定状況に応じた適正な車両制御状態を特定し、
前記現実の車両制御状態と適正な車両制御状態とに基づいて前記特定状況におけるドライバの運転技能を学習し、
学習された前記運転技能に応じた操作案内を前記特定状況で出力する、
ナビゲーション方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−17340(P2007−17340A)
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願番号】特願2005−200394(P2005−200394)
【出願日】平成17年7月8日(2005.7.8)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願日】平成17年7月8日(2005.7.8)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]