
ナビゲーション装置及び制御方法
【課題】ナビゲーション装置が再起動した場合であっても、経路案内を適切に実行することが可能なナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、バッテリ及びエンジンを有する移動体のバッテリを電源とし、判定手段及び案内手段を備える。判定手段は、移動体の走行停止時にエンジンが停止したか否か判定する。案内手段は、移動体の走行停止時にエンジンが停止したと判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する。
【解決手段】ナビゲーション装置は、バッテリ及びエンジンを有する移動体のバッテリを電源とし、判定手段及び案内手段を備える。判定手段は、移動体の走行停止時にエンジンが停止したか否か判定する。案内手段は、移動体の走行停止時にエンジンが停止したと判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の経路案内を行う技術に関する。
【背景技術】
【0002】
従来から、停車を検知してエンジン停止するアイドリングストップ車両において、エンジン停止からエンジンを再起動させる際に、電気負荷に必要な電力を供給するための技術が知られている。例えば、特許文献1には、エンジンの再起動時に、バッテリの電圧を昇圧し、第1の電気負荷へ電力を供給すると共に、突入電流が流れる第2の電気負荷の動作を遅延させる制御を行う車両用電源装置が開示されている。その他、本発明に関連する技術が、特許文献2及び3に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−142089号公報
【特許文献2】特開2010−070070号公報
【特許文献3】特開2008−182259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の各特許文献に記載された技術は、エンジン再始動時におけるバッテリからの供給電力の低下に起因した各種装置の一時停止を予め防止することを目的としたものである。一方、エンジン再始動時におけるバッテリの電圧低下によりナビゲーション装置が再起動した場合であっても、経路案内を適切に行う点については何ら開示されていない。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、ナビゲーション装置が再起動した場合であっても、経路案内を適切に実行することが可能なナビゲーション装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、を備えることを特徴とする。
【0007】
請求項10に記載の発明は、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、を備えることを特徴とする。
【図面の簡単な説明】
【0008】
【図1】第1実施例に係るナビゲーションシステムの概略構成を示す。
【図2】ナビゲーション装置の概略構成を示す。
【図3】バッテリ電圧の時間変化を示すグラフを示す。
【図4】(a)は、所定の走行ルートを走行中に、信号機の表示に従い車両がアイドリングストップした場合の道路の概要図を示し、(b)は、ナビゲーション装置が再起動した直後の道路の概要図を示す。
【図5】第1実施例の処理手順を示すフローチャートの一例である。
【図6】第2実施例に係るナビゲーションシステムの概略構成を示す。
【図7】第2実施例の処理手順を示すフローチャートの一例である。
【発明を実施するための形態】
【0009】
本発明の好適な実施形態によれば、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、を備える。
【0010】
上記のナビゲーション装置は、バッテリ及びエンジンを有する移動体のバッテリを電源とし、判定手段及び案内手段を備える。判定手段は、移動体の走行停止時にエンジンが停止したか否か、即ち移動体のエンジンがアイドリングストップしたか否か判定する。案内手段は、移動体の走行停止時にエンジンが停止したと判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する。このようにすることで、ナビゲーション装置は、エンジン再起動時のバッテリの電圧低下に起因してナビゲーション装置が再起動した場合であっても、必要な経路情報を運転者に通知することができる。
【0011】
上記ナビゲーション装置の一態様では、前記案内手段は、前記エンジンが停止したと前記判定手段が判定した場合において、音声出力すべき経路情報が、既に音声出力された経路情報と同一の情報である場合、当該経路情報の音声出力を行わない。このようにすることで、ナビゲーション装置は、渋滞等において断続的にエンジンがアイドリングストップを行う場合などに、不要に同一内容の経路情報を音声出力するのを抑制することができる。
【0012】
上記ナビゲーション装置の他の一態様では、前記判定手段は、走行停止時の前記バッテリの電圧の変化に基づき、前記エンジンが停止したか否か判定する。一般に、走行時のバッテリの電圧より、アイドリングストップ時のバッテリの電圧は低い。従って、ナビゲーション装置は、この態様により、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0013】
上記ナビゲーション装置の他の一態様では、前記判定手段は、前記移動体の走行停止時に前記バッテリの電圧が、前記移動体の走行中の前記バッテリの電圧に基づき設定された閾値を下回った場合、前記エンジンが停止したと判定する。この態様により、ナビゲーション装置は、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0014】
上記ナビゲーション装置の他の一態様では、前記判定手段は、前記移動体の走行停止時に前記エンジンが停止したか否かの情報を前記移動体から受信する。この態様によっても、ナビゲーション装置は、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0015】
上記ナビゲーション装置の他の一態様では、前記案内手段により前記再起動中に出力すべき経路情報が音声出力された後、前記ナビゲーション装置の再起動がなされるか否か判定する再起動判定手段をさらに備え、前記案内手段は、前記ナビゲーション装置の再起動がなされなかったと前記再起動判定手段が判定した以後では、前記再起動中に出力すべき経路情報の音声出力を行わない。一般に、車種によって、アイドリングストップからのエンジンの再始動時にナビゲーション装置の再始動が生じる車種と、生じない車種とが存在する。従って、ナビゲーション装置は、この態様により、ナビゲーション装置の再始動が生じる移動体に対してのみ、出力すべき経路案内を予め実行して利便性を向上させることができる。
【0016】
上記ナビゲーション装置の他の一態様では、前記案内手段は、前記移動体の走行停止時に前記エンジンが停止した状態が所定時間幅以上継続したと判定した場合に、前記再起動中に出力すべき経路情報を、予め音声出力する。このようにすることで、ナビゲーション装置は、渋滞等において断続的にエンジンがアイドリングストップを行う場合などに、不要に同一内容の経路情報を音声出力するのを抑制することができる。
【0017】
上記ナビゲーション装置の他の一態様では、前記所定の走行時間は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される時間とされる。
【0018】
上記ナビゲーション装置の他の一態様では、前記所定の走行距離は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される走行距離とされる。
【0019】
本発明の好適な他の実施形態によれば、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、を備える。ナビゲーション装置は、この制御方法を実行することで、エンジン再起動時のバッテリの電圧低下に起因してナビゲーション装置が再起動した場合であっても、必要な経路情報を運転者に通知することができる。
【実施例】
【0020】
以下、図面を参照して本発明の好適な第1実施例及び第2実施例について説明する。以後では、目的地及び立寄地を特に区別しない場合、これらを「目的地等」と呼ぶ。なお、「立寄地」とは、使用者が目的地の途中で立ち寄る地点として設定した地点を指す。
【0021】
<第1実施例>
[ナビゲーションシステムの概略構成]
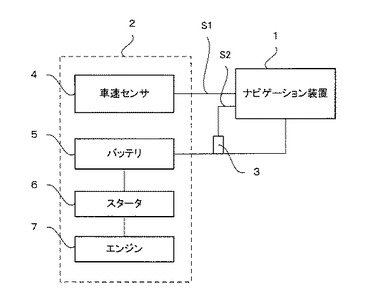
図1は、第1実施例に係るナビゲーションシステムの概略構成を示す。図1に示すように、ナビゲーションシステムは、ナビゲーション装置1と、車速センサ4、バッテリ5、スタータ6、及びエンジン7を備える車両2と、電圧センサ3とを備える。ナビゲーション装置1は、車両2に搭載され、ユーザが設定した目的地等へのルート(経路)案内を行う。ナビゲーション装置1は、バッテリ5から電力の供給を受けて動作する。また、ナビゲーション装置1は、車速センサ4から車両2の車速パルスに相当する検出信号「S1」を受信すると共に、バッテリ5の電圧に相当する検出信号「S2」を電圧センサ3から受信する。ナビゲーション装置1の具体的な構成については、図2を用いて後述する。
【0022】
車両2は、停車時にエンジン7を停止させることが可能な車両である。具体的には、車両2では、図示しないECU(Electronic Control Unit)が停車を検知してエンジン7を停止し、発進操作を検知した場合にスタータ6を駆動させてエンジン7を再始動させる。
【0023】
車速センサ4は、車両2の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。車速センサ4は、車両2の車速に相当する検出信号S1をナビゲーション装置1へ送信する。バッテリ5は、スタータ6やエンジン7の補機類等に対して電力を供給するための蓄電池である。スタータ(スタータモータ)6は、停止状態にあるエンジン7を回転させて始動させる電動機である。スタータ6は、バッテリ5に蓄えられた電気を電源として回転する。
【0024】
電圧センサ3は、バッテリ5とナビゲーション装置1との電源ラインの出力電圧(単に「バッテリ電圧Vb」とも呼ぶ。)を検出する。電圧センサ3は、検出したバッテリ電圧Vbに相当する検出信号S2をナビゲーション装置1へ送信する。
【0025】
[ナビゲーション装置の概略構成]
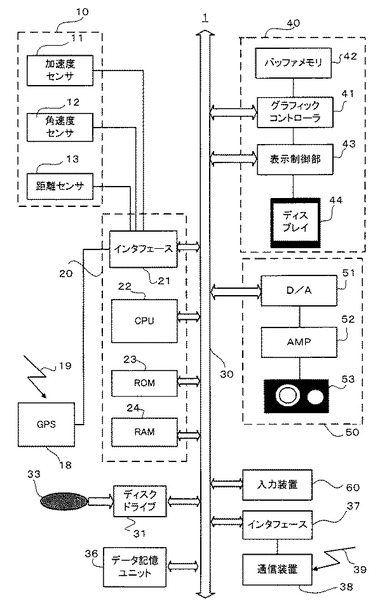
図2は、ナビゲーション装置1の概略構成を示す。図2に示すように、ナビゲーション装置1は、自立測位装置10、GPS受信機18、システムコントローラ20、ディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、通信装置38、表示ユニット40、音声出力ユニット50及び入力装置60を備える。
【0026】
自立測位装置10は、加速度センサ11、角速度センサ12及び距離センサ13を備える。加速度センサ11は、例えば圧電素子からなり、車両2の加速度を検出し、加速度データを出力する。角速度センサ12は、例えば振動ジャイロからなり、車両2の方向変換時における車両2の角速度を検出し、角速度データ及び相対方位データを出力する。距離センサ13は、車両2の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。
【0027】
GPS受信機18は、複数のGPS衛星から、測位用データを含む下り回線データを搬送する電波19を受信する。測位用データは、緯度及び経度情報等から車両2の絶対的な位置(以後、「現在地」とも呼ぶ。)を検出するために用いられる。
【0028】
システムコントローラ20は、インタフェース21、CPU(Central Processing Unit)22、ROM(Read Only Memory)23及びRAM(Random Access Memory)24を含んでおり、ナビゲーション装置1全体の制御を行う。
【0029】
インタフェース21は、加速度センサ11、角速度センサ12及び距離センサ13並びにGPS受信機18とのインタフェース動作を行う。そして、これらから、車速パルス、加速度データ、相対方位データ、角速度データ、GPS測位データ、絶対方位データ等をシステムコントローラ20に入力する。CPU22は、システムコントローラ20全体を制御する。ROM23は、システムコントローラ20を制御する制御プログラム等が格納された図示しない不揮発性メモリ等を有する。RAM24は、入力装置60を介して使用者により予め設定された経路データ等の各種データを読み出し可能に格納したり、CPU22に対してワーキングエリアを提供したりする。
【0030】
システムコントローラ20、CD−ROMドライブ又はDVD−ROMドライブなどのディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、表示ユニット40、音声出力ユニット50及び入力装置60は、バスライン30を介して相互に接続されている。
【0031】
ディスクドライブ31は、システムコントローラ20の制御の下、CD又はDVDといったディスク33から、音楽データ、映像データなどのコンテンツデータを読み出し、出力する。なお、ディスクドライブ31は、CD−ROMドライブ又はDVD−ROMドライブのうち、いずれか一方としてもよいし、CD及びDVDコンパチブルのドライブとしてもよい。データ記憶ユニット36は、例えば、HDDなどにより構成され、地図データなどのナビゲーション処理に用いられる各種データを記憶するユニットである。通信装置38は、例えば、FMチューナやビーコンレシーバ、携帯電話や専用の通信カードなどにより構成され、VICS(Vehicle Information Communication System)センタなどから配信される情報(以下、「VICS情報」と呼ぶ。)を電波39より取得する。そしてインタフェース37は、通信装置38のインタフェース動作を行い、VICS情報をシステムコントローラ20等に入力する。
【0032】
表示ユニット40は、システムコントローラ20の制御の下、各種表示データをディスプレイなどの表示装置に表示する。具体的には、システムコントローラ20は、データ記憶ユニット36から地図データを読み出す。表示ユニット40は、システムコントローラ20によってデータ記憶ユニット36から読み出された地図データなどを表示画面上に表示する。表示ユニット40は、バスライン30を介してCPU22から送られる制御データに基づいて表示ユニット40全体の制御を行うグラフィックコントローラ41と、VRAM(Video RAM)等のメモリからなり即時表示可能な画像情報を一時的に記憶するバッファメモリ42と、グラフィックコントローラ41から出力される画像データに基づいて、液晶、CRT(Cathode Ray Tube)等のディスプレイ44を表示制御する表示制御部43と、ディスプレイ44とを備える。ディスプレイ44は、画像表示部として機能し、例えば対角5〜10インチ程度の液晶表示装置等からなり、車内のフロントパネル付近に装着される。
【0033】
音声出力ユニット50は、システムコントローラ20の制御の下、CD−ROMドライブ31又はDVD−ROM32、若しくはRAM24等からバスライン30を介して送られる音声デジタルデータのD/A(Digital to Analog)変換を行うD/Aコンバータ51と、D/Aコンバータ51から出力される音声アナログ信号を増幅する増幅器(AMP)52と、増幅された音声アナログ信号を音声に変換して車内に出力するスピーカ53とを備えて構成されている。
【0034】
入力装置60は、各種コマンドやデータを入力するための、キー、スイッチ、ボタン、リモコン、音声入力装置等から構成されている。入力装置60は、車内に搭載された当該車載用電子システムの本体のフロントパネルやディスプレイ44の周囲に配置される。また、ディスプレイ44がタッチパネル方式の場合、ディスプレイ44の表示画面上に設けられたタッチパネルも入力装置60として機能する。
【0035】
なお、図2におけるCPU22などは、本発明における判定手段、案内手段、及び再起動判定手段に相当する。
【0036】
[制御方法]
次に、ナビゲーション装置1のシステムコントローラ20が実行する具体的な制御方法について説明する。概略的には、システムコントローラ20は、車両2の停車時のエンジン7の停止(「アイドリングストップ」とも呼ぶ。)を検知した場合に、エンジン7の再始動時にナビゲーション装置1が再起動することを前提として、当該再起動中に出力すべき経路情報の事前の音声案内(「経路情報の事前通知」とも呼ぶ。)を行う。これにより、アイドリングストップに起因してナビゲーション装置1が再起動により一時停止した場合であっても、走行すべき経路情報を運転者に認識させる。
【0037】
まず、アイドリングストップの検出方法について説明する。システムコントローラ20は、バッテリ電圧Vbの変化に基づき、アイドリングストップを検出する。具体的には、システムコントローラ20は、車両2の走行中のバッテリ電圧Vb(「バッテリ電圧Vb1」と呼ぶ。)を検出する。そして、システムコントローラ20は、走行時バッテリ電圧Vb1に基づき、バッテリ電圧Vbがエンジン7の停止時のバッテリ電圧Vb(「エンジン停止時バッテリ電圧Vb2」と呼ぶ。)となったか否かを判断するためのバッテリ電圧Vbの閾値(以後、「閾値Vth」と呼ぶ。)を設定する。例えば、システムコントローラ20は、走行時バッテリ電圧Vb1に所定比率を乗じた値を閾値Vthに設定する。上述の所定比率は、例えば実験等に基づき予め定められる。そして、システムコントローラ20は、車両2の停車時に、バッテリ電圧Vbが閾値Vth以下か否か判定し、バッテリ電圧Vbが閾値Vth以下の場合には、エンジン7が停止されたアイドリングストップ中であると判断する。
【0038】
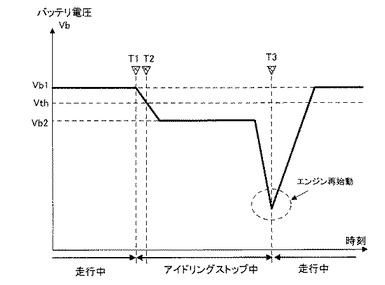
次に、図3を参照し、アイドリングストップの検出方法及び経路情報の事前通知の必要性等について具体的に説明する。図3は、バッテリ電圧Vbの時間変化のグラフを示す。
【0039】
エンジン7がアイドリングストップする時刻「T1」までの車両2の走行時では、システムコントローラ20は、走行時バッテリ電圧Vb1を検出し、当該走行時バッテリ電圧Vb1から閾値Vthを算出する。
【0040】
次に、時刻T1から、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下となるか否か判定する。なお、図3に示すように、時刻T1以後、バッテリ電圧Vbは、走行時バッテリ電圧Vb1からエンジン停車時バッテリ電圧Vb2へ徐々に遷移する。
【0041】
そして、バッテリ電圧Vbが閾値Vth以下となった時刻「T2」において、システムコントローラ20は、車両2がアイドリングストップしたと判断し、後述する経路情報の事前通知を行う。
【0042】
その後、時刻「T3」において、エンジン7が再始動する。このとき、バッテリ5からスタータ6へ電力を供給するために比較的大きな電流が流れ、バッテリ5に大きな負担がかかる。その結果、図3に示すように、バッテリ電圧Vbが一時低下する。そして、ナビゲーション装置1に所定の電力を供給するための電圧値をバッテリ電圧Vbが下回った場合には、ナビゲーション装置1は、一時停止した後に再起動することになる。この場合、ナビゲーション装置1は、再起動に時間を要し、経路案内を再開可能な状態になるまで、適切に経路情報を運転者に通知することができない。
【0043】
以上を勘案し、システムコントローラ20は、エンジン7がアイドリングストップしたと判断した場合には、ナビゲーション装置1の再起動を前提として、当該再起動中に出力すべき経路案内を予め音声出力する。これについて図4を参照してさらに具体的に説明する。
【0044】
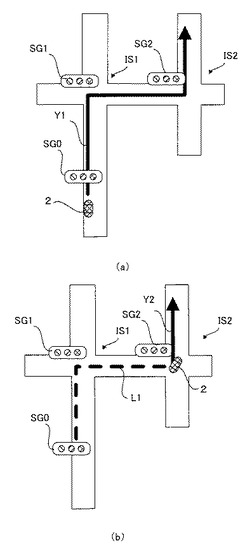
図4(a)は、所定の走行ルートを走行中に、信号機「SG0」の表示に従い車両2が停車している様子を示す道路の概要図を示し、図4(b)は、ナビゲーション装置1の再起動が完了した直後の道路の概要図を示す。図4(a)、(b)において、実線の矢印「Y1」、「Y2」は、車両2の目的地等への走行予定の経路を示し、信号機「SG1」は、交差点「IS1」に対する信号を表示し、信号機「SG2」は、交差点「IS2」に対する信号を表示する。また、破線「L1」は、ナビゲーション装置2の再起動中に車両2が通過した経路を示す。
【0045】
図4(a)では、車両2は、信号機SG0の表示に従い、停車し、かつエンジン7を停止させる。このとき、システムコントローラ20は、ナビゲーション装置1の再起動を前提とした場合に、当該再起動中に出力すべき経路情報を予め音声出力する。具体的には、この場合、システムコントローラ20は、例えば、次の交差点「IS1」を右折し、その先、交差点「IS2」を左折すべき旨を音声出力する。このようにすることで、エンジン7の再始動時にナビゲーション装置1が再起動を開始し、図4(a)から図4(b)に示す位置までナビゲーション装置1が再起動中であっても、システムコントローラ20は、走行に必要な経路情報を運転者に通知することができる。
【0046】
ここで、図4(b)の破線L1に相当する、ナビゲーション装置1の再起動中に走行すると予想される経路(「再起動時通過経路Rt」とも呼ぶ。)の特定方法の具体例を説明する。
【0047】
例えば、システムコントローラ20は、ナビゲーション装置1の再起動に要する時間幅、即ちナビゲーション装置1が一時停止してから経路案内を開始できる状態になるまでの時間幅を、予め実験等に基づき求めておき、データ記憶ユニット36等のメモリに記憶しておく。上述の時間幅は、本発明に係る「所定の走行時間」の一例である。また、システムコントローラ20は、ナビゲーション装置1の再起動時での車速の推定値を算出する。例えば、システムコントローラ20は、例えば停車直前の所定時間幅における車両2の車速の平均値を算出する。
【0048】
そして、システムコントローラ20は、上述の時間幅と、上述の車速の推定値とを乗じることで、ナビゲーション装置1の再起動時の走行距離を推定する。この走行距離は、本発明における「所定の走行距離」の一例である。そして、システムコントローラ20は、現在位置から目的地等までの経路のうち、現在位置から推定した走行距離内の区間を、再起動時通過経路Rtに定める。このようにすることで、システムコントローラ20は、再起動時通過経路Rtを適切に推定し、当該再起動時通過経路Rt内で音声出力すべき経路情報を予め音声出力することができる。
【0049】
[処理フロー]
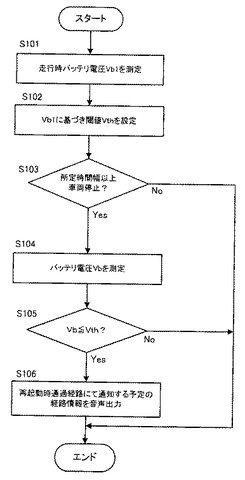
図5は、第1実施例に係るシステムコントローラ20の処理手順を示すフローチャートの一例である。システムコントローラ20は、図5に示すフローチャートの処理を、例えば所定の周期に従い繰り返し実行する。
【0050】
まず、システムコントローラ20は、走行時バッテリ電圧Vb1を測定する(ステップS101)。具体的には、車速センサ4からの検出信号S1に基づき、車両2が走行中であると判定した場合に、電圧センサ3から供給される検出信号S2が示すバッテリ電圧Vbを走行時バッテリ電圧Vb1に定める。
【0051】
次に、システムコントローラ20は、走行時バッテリ電圧Vb1に基づき閾値Vthを設定する(ステップS102)。例えば、システムコントローラ20は、走行時バッテリ電圧Vb1に「1」未満の所定比率を乗じた値を、閾値Vthに定める。
【0052】
次に、システムコントローラ20は、所定時間幅以上車両2が停車しているか否か判定する(ステップS103)。具体的には、システムコントローラ20は、車速センサ4からの検出信号S1に基づき、車両2が停止中の時間幅を計測し、当該時間幅が所定時間幅以上であるか否か判定する。上述の所定時間幅は、例えば、車両2の停止後にエンジン7が停止されるまでの時間幅に設定され、具体的には実験等に基づき予め定められる。そして、システムコントローラ20は、所定時間幅以上車両2が停止しなかった場合(ステップS103;No)、即ち、停止してから所定時間幅経過する前に車両2が走行を開始した場合、フローチャートの処理を終了する。
【0053】
一方、システムコントローラ20は、所定時間幅以上車両2が停車していると判断した場合(ステップS103;Yes)、バッテリ電圧Vbを測定する(ステップS104)。そして、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下であるか否か判定する(ステップS105)。そして、システムコントローラ20は、バッテリ電圧Vbが閾値Vthより大きいと判断した場合(ステップS105;No)、エンジン7は停止していないと判断し、フローチャートの処理を終了する。
【0054】
一方、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下であると判断した場合(ステップS105;Yes)、再起動時通過経路Rtにて通知する予定の経路情報を予め音声出力する(ステップS106)。具体的には、システムコントローラ20は、ナビゲーション装置1の再起動を前提とし、当該再起動に要する時間幅と、当該再起動時での推定される車両2の車速とに基づき、再起動時通過経路Rtを推定し、当該経路内で通知すべき経路情報を音声出力する。このようにすることで、システムコントローラ20は、アイドリングストップ後のエンジン7の再始動に起因してナビゲーション装置1が再起動した場合であっても、必要な経路案内を適切に実行することができる。
【0055】
<第2実施例>
次に、第2実施例に係るナビゲーションシステムについて説明する。図6は、第2実施例に係るナビゲーションシステムの概略構成を示す。第2実施例では、ナビゲーション装置1は、車両2から送信される情報に基づき、車両2のエンジン7がアイドリングストップ中であるか否かを判断する点で、第1実施例と異なる。その他、第1実施例と同様の部分については適宜同一の符号を付し、その説明を省略する。
【0056】
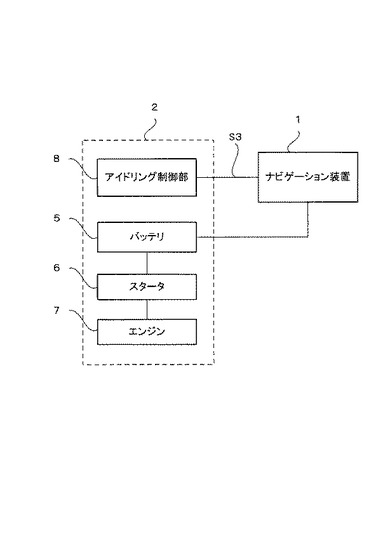
図6は、第2実施例に係るナビゲーションシステムの概略構成を示す。第2実施例では、車両2は、アイドリング制御部8を備える。アイドリング制御部8は、例えばECUであり、車両2の停止時にエンジン7を停止させる制御を行う。そして、アイドリング制御部8は、車両2の停止時にエンジン7を停止させた場合に、アイドリングストップを開始した旨の情報を示す制御信号「S3」をナビゲーション装置1に送信する。そして、ナビゲーション装置1は、制御信号S3を受信した場合、アイドリングストップが行われたと判断し、第1実施例と同様、ナビゲーション装置1の再起動を前提として、再起動時通過経路Rtを算出し、当該経路内で通知すべき経路情報を音声出力する。
【0057】
図7は、第2実施例においてシステムコントローラ20が実行する処理手順を示すフローチャートの一例である。システムコントローラ20は、図7に示すフローチャートの処理を、例えば所定の周期に従い繰り返し実行する。
【0058】
まず、システムコントローラ20は、アイドリングストップした旨の情報を車両2から受信したか否か判定する(ステップS201)。具体的には、システムコントローラ20は、アイドリングストップした旨の情報を示す制御信号S3を車両2のアイドリング制御部8から受信したか否か判定する。
【0059】
そして、システムコントローラ20は、アイドリングストップした旨の情報を受信したと判断した場合(ステップS201;Yes)、再起動時通過経路Rtにて通知する予定の経路案内情報を音声出力する。具体的には、この場合、第1実施例と同様、システムコントローラ20は、エンジン7の再始動時のナビゲーション装置1の再起動を前提とし、当該再起動に要する時間幅と、当該再起動時での推定される車両2の車速とに基づき、再起動時通過経路Rtを特定し、当該経路内で通知すべき経路情報を音声出力する。
【0060】
<変形例>
以下、第1実施例及び第2実施例の各変形例について説明する。なお、これらの各変形例は、任意に組み合わせて上述の実施例に適用してもよい。
【0061】
[変形例1]
システムコントローラ20は、エンジン7がアイドリングストップ中であると判断した場合であっても、既に同じ内容の音声案内を予め行っていた場合には、再び経路情報の事前通知を行わなくてもよい。
【0062】
具体的には、この場合、システムコントローラ20は、エンジン7がアイドリングストップ中であると判断した後、再起動時通過経路Rtを特定し、特定した再起動時通過経路Rtの走行中に音声案内すべき経路情報を定める。次に、システムコントローラ20は、音声案内すべきと定めた経路情報と同一内容の音声案内を既に行っているか否か判定し、同一内容の音声案内を行っていた場合には、当該経路情報を音声出力しない。これにより、システムコントローラ20は、渋滞等で車両2が断続的に停車を行う場合に、同一内容の経路案内を、車両2が停車するごとに行うのを抑制することができる。
【0063】
また、システムコントローラ20は、音声案内すべき経路情報が既に音声出力されているか否かを直接的に判断する代わりに、経路情報の事前通知後、次に通過すべき交差点、踏み切り、工事現場などの所定の案内地点を1度も通過していないと判断した場合には、再び経路情報の事前通知をしなくてもよい。これによっても、システムコントローラ20は、同一内容の経路案内を、車両2が停車するごとに行うのを抑制することができる。
【0064】
[変形例2]
システムコントローラ20は、エンジン7のアイドリングストップ時に、ナビゲーション装置1が必ず再起動するということを前提にして、経路情報の事前通知を行った。しかし、本発明に適用可能な方法はこれに限定されない。これに代えて、システムコントローラ20は、ナビゲーション装置1が再起動するか否か学習し、エンジン7のアイドリングストップ時にナビゲーション装置1が再起動しないと学習した以後では、経路情報の事前通知を行わなくてもよい。
【0065】
具体的には、まず、システムコントローラ20は、エンジン7のアイドリングストップ時に、ナビゲーション装置1の再起動中に行うべき音声案内を実行した後、エンジン7の再始動時に、バッテリ電圧Vbが所定電圧以下まで低下するか否か判定する。上述の所定電圧は、ナビゲーション装置1が再起動する虞のないバッテリ電圧Vbの下限値等に設定される。そして、システムコントローラ20は、エンジン7の再始動時にバッテリ電圧Vbが所定電圧より大きい場合には、エンジン7の再始動によりナビゲーション装置1が再起動する虞はないと判断し、次回以降のエンジン7のアイドリングストップ時には、経路情報の事前通知を行わない。
【0066】
[変形例3]
システムコントローラ20は、エンジン7がアイドリングストップしたと判断した場合、直ちに経路情報の事前通知を行った。しかし、本発明が適用可能な方法は、これに限定されない。これに代えて、システムコントローラ20は、エンジン7がアイドリングストップの状態が所定時間幅継続したと判断した場合に、経路情報の事前通知を行ってもよい。
【0067】
上述の所定時間幅は、例えば渋滞時における一時的な停止と判断されるアイドリングストップの時間幅等を勘案して定められる。また、上述の所定時間幅は、変動値であってもよい。例えば、システムコントローラ20は、所定のマップ等を参照し、ナビゲーション装置1の再起動中に音声案内に要する時間幅が長いほど、上述の所定時間幅を短くしてもよい。これにより、システムコントローラ20は、再起動時通過経路Rtで出力すべき音声案内を出力中又は出力前にエンジン7の再始動が行われ、ナビゲーション装置1の再起動により経路情報の事前通知ができなくなるのを抑制することができる。
【0068】
[変形例4]
第1実施例では、ナビゲーション装置1は、車両2に備えられた車速センサ4からの検出信号S1に基づき、車両2の走行及び停止等を判断したが、これに代えて、ナビゲーション装置1が備える自立測位装置10(例えば距離センサ13)に基づき、車両2の走行及び停止等を判断してもよい。
【産業上の利用可能性】
【0069】
本発明は、車載用ナビゲーション装置、PND(Personal Navigation Device)、目的地等への経路案内を行う装置に好適に適用することができる。
【符号の説明】
【0070】
1 ナビゲーション装置
2 車両
3 電圧センサ
4 車速センサ
5 バッテリ
6 スタータ
7 エンジン
8 アイドリング制御部
10 自立測位装置
12 GPS受信機
20 システムコントローラ
22 CPU
36 データ記憶ユニット
38 通信装置
40 表示ユニット
44 ディスプレイ
【技術分野】
【0001】
本発明は、移動体の経路案内を行う技術に関する。
【背景技術】
【0002】
従来から、停車を検知してエンジン停止するアイドリングストップ車両において、エンジン停止からエンジンを再起動させる際に、電気負荷に必要な電力を供給するための技術が知られている。例えば、特許文献1には、エンジンの再起動時に、バッテリの電圧を昇圧し、第1の電気負荷へ電力を供給すると共に、突入電流が流れる第2の電気負荷の動作を遅延させる制御を行う車両用電源装置が開示されている。その他、本発明に関連する技術が、特許文献2及び3に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−142089号公報
【特許文献2】特開2010−070070号公報
【特許文献3】特開2008−182259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の各特許文献に記載された技術は、エンジン再始動時におけるバッテリからの供給電力の低下に起因した各種装置の一時停止を予め防止することを目的としたものである。一方、エンジン再始動時におけるバッテリの電圧低下によりナビゲーション装置が再起動した場合であっても、経路案内を適切に行う点については何ら開示されていない。
【0005】
本発明は、上記のような課題を解決するためになされたものであり、ナビゲーション装置が再起動した場合であっても、経路案内を適切に実行することが可能なナビゲーション装置を提供することを主な目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、を備えることを特徴とする。
【0007】
請求項10に記載の発明は、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、を備えることを特徴とする。
【図面の簡単な説明】
【0008】
【図1】第1実施例に係るナビゲーションシステムの概略構成を示す。
【図2】ナビゲーション装置の概略構成を示す。
【図3】バッテリ電圧の時間変化を示すグラフを示す。
【図4】(a)は、所定の走行ルートを走行中に、信号機の表示に従い車両がアイドリングストップした場合の道路の概要図を示し、(b)は、ナビゲーション装置が再起動した直後の道路の概要図を示す。
【図5】第1実施例の処理手順を示すフローチャートの一例である。
【図6】第2実施例に係るナビゲーションシステムの概略構成を示す。
【図7】第2実施例の処理手順を示すフローチャートの一例である。
【発明を実施するための形態】
【0009】
本発明の好適な実施形態によれば、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、を備える。
【0010】
上記のナビゲーション装置は、バッテリ及びエンジンを有する移動体のバッテリを電源とし、判定手段及び案内手段を備える。判定手段は、移動体の走行停止時にエンジンが停止したか否か、即ち移動体のエンジンがアイドリングストップしたか否か判定する。案内手段は、移動体の走行停止時にエンジンが停止したと判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する。このようにすることで、ナビゲーション装置は、エンジン再起動時のバッテリの電圧低下に起因してナビゲーション装置が再起動した場合であっても、必要な経路情報を運転者に通知することができる。
【0011】
上記ナビゲーション装置の一態様では、前記案内手段は、前記エンジンが停止したと前記判定手段が判定した場合において、音声出力すべき経路情報が、既に音声出力された経路情報と同一の情報である場合、当該経路情報の音声出力を行わない。このようにすることで、ナビゲーション装置は、渋滞等において断続的にエンジンがアイドリングストップを行う場合などに、不要に同一内容の経路情報を音声出力するのを抑制することができる。
【0012】
上記ナビゲーション装置の他の一態様では、前記判定手段は、走行停止時の前記バッテリの電圧の変化に基づき、前記エンジンが停止したか否か判定する。一般に、走行時のバッテリの電圧より、アイドリングストップ時のバッテリの電圧は低い。従って、ナビゲーション装置は、この態様により、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0013】
上記ナビゲーション装置の他の一態様では、前記判定手段は、前記移動体の走行停止時に前記バッテリの電圧が、前記移動体の走行中の前記バッテリの電圧に基づき設定された閾値を下回った場合、前記エンジンが停止したと判定する。この態様により、ナビゲーション装置は、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0014】
上記ナビゲーション装置の他の一態様では、前記判定手段は、前記移動体の走行停止時に前記エンジンが停止したか否かの情報を前記移動体から受信する。この態様によっても、ナビゲーション装置は、好適に、移動体の走行停止時にエンジンが停止したか否か判定することができる。
【0015】
上記ナビゲーション装置の他の一態様では、前記案内手段により前記再起動中に出力すべき経路情報が音声出力された後、前記ナビゲーション装置の再起動がなされるか否か判定する再起動判定手段をさらに備え、前記案内手段は、前記ナビゲーション装置の再起動がなされなかったと前記再起動判定手段が判定した以後では、前記再起動中に出力すべき経路情報の音声出力を行わない。一般に、車種によって、アイドリングストップからのエンジンの再始動時にナビゲーション装置の再始動が生じる車種と、生じない車種とが存在する。従って、ナビゲーション装置は、この態様により、ナビゲーション装置の再始動が生じる移動体に対してのみ、出力すべき経路案内を予め実行して利便性を向上させることができる。
【0016】
上記ナビゲーション装置の他の一態様では、前記案内手段は、前記移動体の走行停止時に前記エンジンが停止した状態が所定時間幅以上継続したと判定した場合に、前記再起動中に出力すべき経路情報を、予め音声出力する。このようにすることで、ナビゲーション装置は、渋滞等において断続的にエンジンがアイドリングストップを行う場合などに、不要に同一内容の経路情報を音声出力するのを抑制することができる。
【0017】
上記ナビゲーション装置の他の一態様では、前記所定の走行時間は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される時間とされる。
【0018】
上記ナビゲーション装置の他の一態様では、前記所定の走行距離は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される走行距離とされる。
【0019】
本発明の好適な他の実施形態によれば、バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、を備える。ナビゲーション装置は、この制御方法を実行することで、エンジン再起動時のバッテリの電圧低下に起因してナビゲーション装置が再起動した場合であっても、必要な経路情報を運転者に通知することができる。
【実施例】
【0020】
以下、図面を参照して本発明の好適な第1実施例及び第2実施例について説明する。以後では、目的地及び立寄地を特に区別しない場合、これらを「目的地等」と呼ぶ。なお、「立寄地」とは、使用者が目的地の途中で立ち寄る地点として設定した地点を指す。
【0021】
<第1実施例>
[ナビゲーションシステムの概略構成]
図1は、第1実施例に係るナビゲーションシステムの概略構成を示す。図1に示すように、ナビゲーションシステムは、ナビゲーション装置1と、車速センサ4、バッテリ5、スタータ6、及びエンジン7を備える車両2と、電圧センサ3とを備える。ナビゲーション装置1は、車両2に搭載され、ユーザが設定した目的地等へのルート(経路)案内を行う。ナビゲーション装置1は、バッテリ5から電力の供給を受けて動作する。また、ナビゲーション装置1は、車速センサ4から車両2の車速パルスに相当する検出信号「S1」を受信すると共に、バッテリ5の電圧に相当する検出信号「S2」を電圧センサ3から受信する。ナビゲーション装置1の具体的な構成については、図2を用いて後述する。
【0022】
車両2は、停車時にエンジン7を停止させることが可能な車両である。具体的には、車両2では、図示しないECU(Electronic Control Unit)が停車を検知してエンジン7を停止し、発進操作を検知した場合にスタータ6を駆動させてエンジン7を再始動させる。
【0023】
車速センサ4は、車両2の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。車速センサ4は、車両2の車速に相当する検出信号S1をナビゲーション装置1へ送信する。バッテリ5は、スタータ6やエンジン7の補機類等に対して電力を供給するための蓄電池である。スタータ(スタータモータ)6は、停止状態にあるエンジン7を回転させて始動させる電動機である。スタータ6は、バッテリ5に蓄えられた電気を電源として回転する。
【0024】
電圧センサ3は、バッテリ5とナビゲーション装置1との電源ラインの出力電圧(単に「バッテリ電圧Vb」とも呼ぶ。)を検出する。電圧センサ3は、検出したバッテリ電圧Vbに相当する検出信号S2をナビゲーション装置1へ送信する。
【0025】
[ナビゲーション装置の概略構成]
図2は、ナビゲーション装置1の概略構成を示す。図2に示すように、ナビゲーション装置1は、自立測位装置10、GPS受信機18、システムコントローラ20、ディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、通信装置38、表示ユニット40、音声出力ユニット50及び入力装置60を備える。
【0026】
自立測位装置10は、加速度センサ11、角速度センサ12及び距離センサ13を備える。加速度センサ11は、例えば圧電素子からなり、車両2の加速度を検出し、加速度データを出力する。角速度センサ12は、例えば振動ジャイロからなり、車両2の方向変換時における車両2の角速度を検出し、角速度データ及び相対方位データを出力する。距離センサ13は、車両2の車輪の回転に伴って発生されているパルス信号からなる車速パルスを計測する。
【0027】
GPS受信機18は、複数のGPS衛星から、測位用データを含む下り回線データを搬送する電波19を受信する。測位用データは、緯度及び経度情報等から車両2の絶対的な位置(以後、「現在地」とも呼ぶ。)を検出するために用いられる。
【0028】
システムコントローラ20は、インタフェース21、CPU(Central Processing Unit)22、ROM(Read Only Memory)23及びRAM(Random Access Memory)24を含んでおり、ナビゲーション装置1全体の制御を行う。
【0029】
インタフェース21は、加速度センサ11、角速度センサ12及び距離センサ13並びにGPS受信機18とのインタフェース動作を行う。そして、これらから、車速パルス、加速度データ、相対方位データ、角速度データ、GPS測位データ、絶対方位データ等をシステムコントローラ20に入力する。CPU22は、システムコントローラ20全体を制御する。ROM23は、システムコントローラ20を制御する制御プログラム等が格納された図示しない不揮発性メモリ等を有する。RAM24は、入力装置60を介して使用者により予め設定された経路データ等の各種データを読み出し可能に格納したり、CPU22に対してワーキングエリアを提供したりする。
【0030】
システムコントローラ20、CD−ROMドライブ又はDVD−ROMドライブなどのディスクドライブ31、データ記憶ユニット36、通信用インタフェース37、表示ユニット40、音声出力ユニット50及び入力装置60は、バスライン30を介して相互に接続されている。
【0031】
ディスクドライブ31は、システムコントローラ20の制御の下、CD又はDVDといったディスク33から、音楽データ、映像データなどのコンテンツデータを読み出し、出力する。なお、ディスクドライブ31は、CD−ROMドライブ又はDVD−ROMドライブのうち、いずれか一方としてもよいし、CD及びDVDコンパチブルのドライブとしてもよい。データ記憶ユニット36は、例えば、HDDなどにより構成され、地図データなどのナビゲーション処理に用いられる各種データを記憶するユニットである。通信装置38は、例えば、FMチューナやビーコンレシーバ、携帯電話や専用の通信カードなどにより構成され、VICS(Vehicle Information Communication System)センタなどから配信される情報(以下、「VICS情報」と呼ぶ。)を電波39より取得する。そしてインタフェース37は、通信装置38のインタフェース動作を行い、VICS情報をシステムコントローラ20等に入力する。
【0032】
表示ユニット40は、システムコントローラ20の制御の下、各種表示データをディスプレイなどの表示装置に表示する。具体的には、システムコントローラ20は、データ記憶ユニット36から地図データを読み出す。表示ユニット40は、システムコントローラ20によってデータ記憶ユニット36から読み出された地図データなどを表示画面上に表示する。表示ユニット40は、バスライン30を介してCPU22から送られる制御データに基づいて表示ユニット40全体の制御を行うグラフィックコントローラ41と、VRAM(Video RAM)等のメモリからなり即時表示可能な画像情報を一時的に記憶するバッファメモリ42と、グラフィックコントローラ41から出力される画像データに基づいて、液晶、CRT(Cathode Ray Tube)等のディスプレイ44を表示制御する表示制御部43と、ディスプレイ44とを備える。ディスプレイ44は、画像表示部として機能し、例えば対角5〜10インチ程度の液晶表示装置等からなり、車内のフロントパネル付近に装着される。
【0033】
音声出力ユニット50は、システムコントローラ20の制御の下、CD−ROMドライブ31又はDVD−ROM32、若しくはRAM24等からバスライン30を介して送られる音声デジタルデータのD/A(Digital to Analog)変換を行うD/Aコンバータ51と、D/Aコンバータ51から出力される音声アナログ信号を増幅する増幅器(AMP)52と、増幅された音声アナログ信号を音声に変換して車内に出力するスピーカ53とを備えて構成されている。
【0034】
入力装置60は、各種コマンドやデータを入力するための、キー、スイッチ、ボタン、リモコン、音声入力装置等から構成されている。入力装置60は、車内に搭載された当該車載用電子システムの本体のフロントパネルやディスプレイ44の周囲に配置される。また、ディスプレイ44がタッチパネル方式の場合、ディスプレイ44の表示画面上に設けられたタッチパネルも入力装置60として機能する。
【0035】
なお、図2におけるCPU22などは、本発明における判定手段、案内手段、及び再起動判定手段に相当する。
【0036】
[制御方法]
次に、ナビゲーション装置1のシステムコントローラ20が実行する具体的な制御方法について説明する。概略的には、システムコントローラ20は、車両2の停車時のエンジン7の停止(「アイドリングストップ」とも呼ぶ。)を検知した場合に、エンジン7の再始動時にナビゲーション装置1が再起動することを前提として、当該再起動中に出力すべき経路情報の事前の音声案内(「経路情報の事前通知」とも呼ぶ。)を行う。これにより、アイドリングストップに起因してナビゲーション装置1が再起動により一時停止した場合であっても、走行すべき経路情報を運転者に認識させる。
【0037】
まず、アイドリングストップの検出方法について説明する。システムコントローラ20は、バッテリ電圧Vbの変化に基づき、アイドリングストップを検出する。具体的には、システムコントローラ20は、車両2の走行中のバッテリ電圧Vb(「バッテリ電圧Vb1」と呼ぶ。)を検出する。そして、システムコントローラ20は、走行時バッテリ電圧Vb1に基づき、バッテリ電圧Vbがエンジン7の停止時のバッテリ電圧Vb(「エンジン停止時バッテリ電圧Vb2」と呼ぶ。)となったか否かを判断するためのバッテリ電圧Vbの閾値(以後、「閾値Vth」と呼ぶ。)を設定する。例えば、システムコントローラ20は、走行時バッテリ電圧Vb1に所定比率を乗じた値を閾値Vthに設定する。上述の所定比率は、例えば実験等に基づき予め定められる。そして、システムコントローラ20は、車両2の停車時に、バッテリ電圧Vbが閾値Vth以下か否か判定し、バッテリ電圧Vbが閾値Vth以下の場合には、エンジン7が停止されたアイドリングストップ中であると判断する。
【0038】
次に、図3を参照し、アイドリングストップの検出方法及び経路情報の事前通知の必要性等について具体的に説明する。図3は、バッテリ電圧Vbの時間変化のグラフを示す。
【0039】
エンジン7がアイドリングストップする時刻「T1」までの車両2の走行時では、システムコントローラ20は、走行時バッテリ電圧Vb1を検出し、当該走行時バッテリ電圧Vb1から閾値Vthを算出する。
【0040】
次に、時刻T1から、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下となるか否か判定する。なお、図3に示すように、時刻T1以後、バッテリ電圧Vbは、走行時バッテリ電圧Vb1からエンジン停車時バッテリ電圧Vb2へ徐々に遷移する。
【0041】
そして、バッテリ電圧Vbが閾値Vth以下となった時刻「T2」において、システムコントローラ20は、車両2がアイドリングストップしたと判断し、後述する経路情報の事前通知を行う。
【0042】
その後、時刻「T3」において、エンジン7が再始動する。このとき、バッテリ5からスタータ6へ電力を供給するために比較的大きな電流が流れ、バッテリ5に大きな負担がかかる。その結果、図3に示すように、バッテリ電圧Vbが一時低下する。そして、ナビゲーション装置1に所定の電力を供給するための電圧値をバッテリ電圧Vbが下回った場合には、ナビゲーション装置1は、一時停止した後に再起動することになる。この場合、ナビゲーション装置1は、再起動に時間を要し、経路案内を再開可能な状態になるまで、適切に経路情報を運転者に通知することができない。
【0043】
以上を勘案し、システムコントローラ20は、エンジン7がアイドリングストップしたと判断した場合には、ナビゲーション装置1の再起動を前提として、当該再起動中に出力すべき経路案内を予め音声出力する。これについて図4を参照してさらに具体的に説明する。
【0044】
図4(a)は、所定の走行ルートを走行中に、信号機「SG0」の表示に従い車両2が停車している様子を示す道路の概要図を示し、図4(b)は、ナビゲーション装置1の再起動が完了した直後の道路の概要図を示す。図4(a)、(b)において、実線の矢印「Y1」、「Y2」は、車両2の目的地等への走行予定の経路を示し、信号機「SG1」は、交差点「IS1」に対する信号を表示し、信号機「SG2」は、交差点「IS2」に対する信号を表示する。また、破線「L1」は、ナビゲーション装置2の再起動中に車両2が通過した経路を示す。
【0045】
図4(a)では、車両2は、信号機SG0の表示に従い、停車し、かつエンジン7を停止させる。このとき、システムコントローラ20は、ナビゲーション装置1の再起動を前提とした場合に、当該再起動中に出力すべき経路情報を予め音声出力する。具体的には、この場合、システムコントローラ20は、例えば、次の交差点「IS1」を右折し、その先、交差点「IS2」を左折すべき旨を音声出力する。このようにすることで、エンジン7の再始動時にナビゲーション装置1が再起動を開始し、図4(a)から図4(b)に示す位置までナビゲーション装置1が再起動中であっても、システムコントローラ20は、走行に必要な経路情報を運転者に通知することができる。
【0046】
ここで、図4(b)の破線L1に相当する、ナビゲーション装置1の再起動中に走行すると予想される経路(「再起動時通過経路Rt」とも呼ぶ。)の特定方法の具体例を説明する。
【0047】
例えば、システムコントローラ20は、ナビゲーション装置1の再起動に要する時間幅、即ちナビゲーション装置1が一時停止してから経路案内を開始できる状態になるまでの時間幅を、予め実験等に基づき求めておき、データ記憶ユニット36等のメモリに記憶しておく。上述の時間幅は、本発明に係る「所定の走行時間」の一例である。また、システムコントローラ20は、ナビゲーション装置1の再起動時での車速の推定値を算出する。例えば、システムコントローラ20は、例えば停車直前の所定時間幅における車両2の車速の平均値を算出する。
【0048】
そして、システムコントローラ20は、上述の時間幅と、上述の車速の推定値とを乗じることで、ナビゲーション装置1の再起動時の走行距離を推定する。この走行距離は、本発明における「所定の走行距離」の一例である。そして、システムコントローラ20は、現在位置から目的地等までの経路のうち、現在位置から推定した走行距離内の区間を、再起動時通過経路Rtに定める。このようにすることで、システムコントローラ20は、再起動時通過経路Rtを適切に推定し、当該再起動時通過経路Rt内で音声出力すべき経路情報を予め音声出力することができる。
【0049】
[処理フロー]
図5は、第1実施例に係るシステムコントローラ20の処理手順を示すフローチャートの一例である。システムコントローラ20は、図5に示すフローチャートの処理を、例えば所定の周期に従い繰り返し実行する。
【0050】
まず、システムコントローラ20は、走行時バッテリ電圧Vb1を測定する(ステップS101)。具体的には、車速センサ4からの検出信号S1に基づき、車両2が走行中であると判定した場合に、電圧センサ3から供給される検出信号S2が示すバッテリ電圧Vbを走行時バッテリ電圧Vb1に定める。
【0051】
次に、システムコントローラ20は、走行時バッテリ電圧Vb1に基づき閾値Vthを設定する(ステップS102)。例えば、システムコントローラ20は、走行時バッテリ電圧Vb1に「1」未満の所定比率を乗じた値を、閾値Vthに定める。
【0052】
次に、システムコントローラ20は、所定時間幅以上車両2が停車しているか否か判定する(ステップS103)。具体的には、システムコントローラ20は、車速センサ4からの検出信号S1に基づき、車両2が停止中の時間幅を計測し、当該時間幅が所定時間幅以上であるか否か判定する。上述の所定時間幅は、例えば、車両2の停止後にエンジン7が停止されるまでの時間幅に設定され、具体的には実験等に基づき予め定められる。そして、システムコントローラ20は、所定時間幅以上車両2が停止しなかった場合(ステップS103;No)、即ち、停止してから所定時間幅経過する前に車両2が走行を開始した場合、フローチャートの処理を終了する。
【0053】
一方、システムコントローラ20は、所定時間幅以上車両2が停車していると判断した場合(ステップS103;Yes)、バッテリ電圧Vbを測定する(ステップS104)。そして、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下であるか否か判定する(ステップS105)。そして、システムコントローラ20は、バッテリ電圧Vbが閾値Vthより大きいと判断した場合(ステップS105;No)、エンジン7は停止していないと判断し、フローチャートの処理を終了する。
【0054】
一方、システムコントローラ20は、バッテリ電圧Vbが閾値Vth以下であると判断した場合(ステップS105;Yes)、再起動時通過経路Rtにて通知する予定の経路情報を予め音声出力する(ステップS106)。具体的には、システムコントローラ20は、ナビゲーション装置1の再起動を前提とし、当該再起動に要する時間幅と、当該再起動時での推定される車両2の車速とに基づき、再起動時通過経路Rtを推定し、当該経路内で通知すべき経路情報を音声出力する。このようにすることで、システムコントローラ20は、アイドリングストップ後のエンジン7の再始動に起因してナビゲーション装置1が再起動した場合であっても、必要な経路案内を適切に実行することができる。
【0055】
<第2実施例>
次に、第2実施例に係るナビゲーションシステムについて説明する。図6は、第2実施例に係るナビゲーションシステムの概略構成を示す。第2実施例では、ナビゲーション装置1は、車両2から送信される情報に基づき、車両2のエンジン7がアイドリングストップ中であるか否かを判断する点で、第1実施例と異なる。その他、第1実施例と同様の部分については適宜同一の符号を付し、その説明を省略する。
【0056】
図6は、第2実施例に係るナビゲーションシステムの概略構成を示す。第2実施例では、車両2は、アイドリング制御部8を備える。アイドリング制御部8は、例えばECUであり、車両2の停止時にエンジン7を停止させる制御を行う。そして、アイドリング制御部8は、車両2の停止時にエンジン7を停止させた場合に、アイドリングストップを開始した旨の情報を示す制御信号「S3」をナビゲーション装置1に送信する。そして、ナビゲーション装置1は、制御信号S3を受信した場合、アイドリングストップが行われたと判断し、第1実施例と同様、ナビゲーション装置1の再起動を前提として、再起動時通過経路Rtを算出し、当該経路内で通知すべき経路情報を音声出力する。
【0057】
図7は、第2実施例においてシステムコントローラ20が実行する処理手順を示すフローチャートの一例である。システムコントローラ20は、図7に示すフローチャートの処理を、例えば所定の周期に従い繰り返し実行する。
【0058】
まず、システムコントローラ20は、アイドリングストップした旨の情報を車両2から受信したか否か判定する(ステップS201)。具体的には、システムコントローラ20は、アイドリングストップした旨の情報を示す制御信号S3を車両2のアイドリング制御部8から受信したか否か判定する。
【0059】
そして、システムコントローラ20は、アイドリングストップした旨の情報を受信したと判断した場合(ステップS201;Yes)、再起動時通過経路Rtにて通知する予定の経路案内情報を音声出力する。具体的には、この場合、第1実施例と同様、システムコントローラ20は、エンジン7の再始動時のナビゲーション装置1の再起動を前提とし、当該再起動に要する時間幅と、当該再起動時での推定される車両2の車速とに基づき、再起動時通過経路Rtを特定し、当該経路内で通知すべき経路情報を音声出力する。
【0060】
<変形例>
以下、第1実施例及び第2実施例の各変形例について説明する。なお、これらの各変形例は、任意に組み合わせて上述の実施例に適用してもよい。
【0061】
[変形例1]
システムコントローラ20は、エンジン7がアイドリングストップ中であると判断した場合であっても、既に同じ内容の音声案内を予め行っていた場合には、再び経路情報の事前通知を行わなくてもよい。
【0062】
具体的には、この場合、システムコントローラ20は、エンジン7がアイドリングストップ中であると判断した後、再起動時通過経路Rtを特定し、特定した再起動時通過経路Rtの走行中に音声案内すべき経路情報を定める。次に、システムコントローラ20は、音声案内すべきと定めた経路情報と同一内容の音声案内を既に行っているか否か判定し、同一内容の音声案内を行っていた場合には、当該経路情報を音声出力しない。これにより、システムコントローラ20は、渋滞等で車両2が断続的に停車を行う場合に、同一内容の経路案内を、車両2が停車するごとに行うのを抑制することができる。
【0063】
また、システムコントローラ20は、音声案内すべき経路情報が既に音声出力されているか否かを直接的に判断する代わりに、経路情報の事前通知後、次に通過すべき交差点、踏み切り、工事現場などの所定の案内地点を1度も通過していないと判断した場合には、再び経路情報の事前通知をしなくてもよい。これによっても、システムコントローラ20は、同一内容の経路案内を、車両2が停車するごとに行うのを抑制することができる。
【0064】
[変形例2]
システムコントローラ20は、エンジン7のアイドリングストップ時に、ナビゲーション装置1が必ず再起動するということを前提にして、経路情報の事前通知を行った。しかし、本発明に適用可能な方法はこれに限定されない。これに代えて、システムコントローラ20は、ナビゲーション装置1が再起動するか否か学習し、エンジン7のアイドリングストップ時にナビゲーション装置1が再起動しないと学習した以後では、経路情報の事前通知を行わなくてもよい。
【0065】
具体的には、まず、システムコントローラ20は、エンジン7のアイドリングストップ時に、ナビゲーション装置1の再起動中に行うべき音声案内を実行した後、エンジン7の再始動時に、バッテリ電圧Vbが所定電圧以下まで低下するか否か判定する。上述の所定電圧は、ナビゲーション装置1が再起動する虞のないバッテリ電圧Vbの下限値等に設定される。そして、システムコントローラ20は、エンジン7の再始動時にバッテリ電圧Vbが所定電圧より大きい場合には、エンジン7の再始動によりナビゲーション装置1が再起動する虞はないと判断し、次回以降のエンジン7のアイドリングストップ時には、経路情報の事前通知を行わない。
【0066】
[変形例3]
システムコントローラ20は、エンジン7がアイドリングストップしたと判断した場合、直ちに経路情報の事前通知を行った。しかし、本発明が適用可能な方法は、これに限定されない。これに代えて、システムコントローラ20は、エンジン7がアイドリングストップの状態が所定時間幅継続したと判断した場合に、経路情報の事前通知を行ってもよい。
【0067】
上述の所定時間幅は、例えば渋滞時における一時的な停止と判断されるアイドリングストップの時間幅等を勘案して定められる。また、上述の所定時間幅は、変動値であってもよい。例えば、システムコントローラ20は、所定のマップ等を参照し、ナビゲーション装置1の再起動中に音声案内に要する時間幅が長いほど、上述の所定時間幅を短くしてもよい。これにより、システムコントローラ20は、再起動時通過経路Rtで出力すべき音声案内を出力中又は出力前にエンジン7の再始動が行われ、ナビゲーション装置1の再起動により経路情報の事前通知ができなくなるのを抑制することができる。
【0068】
[変形例4]
第1実施例では、ナビゲーション装置1は、車両2に備えられた車速センサ4からの検出信号S1に基づき、車両2の走行及び停止等を判断したが、これに代えて、ナビゲーション装置1が備える自立測位装置10(例えば距離センサ13)に基づき、車両2の走行及び停止等を判断してもよい。
【産業上の利用可能性】
【0069】
本発明は、車載用ナビゲーション装置、PND(Personal Navigation Device)、目的地等への経路案内を行う装置に好適に適用することができる。
【符号の説明】
【0070】
1 ナビゲーション装置
2 車両
3 電圧センサ
4 車速センサ
5 バッテリ
6 スタータ
7 エンジン
8 アイドリング制御部
10 自立測位装置
12 GPS受信機
20 システムコントローラ
22 CPU
36 データ記憶ユニット
38 通信装置
40 表示ユニット
44 ディスプレイ
【特許請求の範囲】
【請求項1】
バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、
前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、
前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、
を備えることをナビゲーション装置。
【請求項2】
前記案内手段は、前記エンジンが停止したと前記判定手段が判定した場合において、音声出力すべき経路情報が、既に音声出力された経路情報と同一の情報である場合、当該経路情報の音声出力を行わないことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記判定手段は、走行停止時の前記バッテリの電圧の変化に基づき、前記エンジンが停止したか否か判定することを特徴とする請求項1または2に記載のナビゲーション装置。
【請求項4】
前記判定手段は、前記移動体の走行停止時に前記バッテリの電圧が、前記移動体の走行中の前記バッテリの電圧に基づき設定された閾値を下回った場合、前記エンジンが停止したと判定することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記判定手段は、前記移動体の走行停止時に前記エンジンが停止したか否かの情報を前記移動体から受信することを特徴とする請求項1または2に記載のナビゲーション装置。
【請求項6】
前記案内手段により前記再起動中に出力すべき経路情報が音声出力された後、前記ナビゲーション装置の再起動がなされるか否か判定する再起動判定手段をさらに備え、
前記案内手段は、前記ナビゲーション装置の再起動がなされなかったと前記再起動判定手段が判定した以後では、前記再起動中に出力すべき経路情報の音声出力を行わないことを特徴とする請求項1乃至5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記案内手段は、前記移動体の走行停止時に前記エンジンが停止した状態が所定時間幅以上継続したと判定した場合に、前記再起動中に出力すべき経路情報を、予め音声出力することを特徴とする請求項1乃至6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記所定の走行時間は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される時間とされることを特徴とする請求項1乃至7のいずれか一項に記載のナビゲーション装置。
【請求項9】
前記所定の走行距離は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される走行距離とされることを特徴とする請求項1乃至8のいずれか一項に記載のナビゲーション装置。
【請求項10】
バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、
前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、
前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、
を備えることを特徴とする制御方法。
【請求項1】
バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置であって、
前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定手段と、
前記移動体の走行停止時に前記エンジンが停止したと前記判定手段が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内手段と、
を備えることをナビゲーション装置。
【請求項2】
前記案内手段は、前記エンジンが停止したと前記判定手段が判定した場合において、音声出力すべき経路情報が、既に音声出力された経路情報と同一の情報である場合、当該経路情報の音声出力を行わないことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記判定手段は、走行停止時の前記バッテリの電圧の変化に基づき、前記エンジンが停止したか否か判定することを特徴とする請求項1または2に記載のナビゲーション装置。
【請求項4】
前記判定手段は、前記移動体の走行停止時に前記バッテリの電圧が、前記移動体の走行中の前記バッテリの電圧に基づき設定された閾値を下回った場合、前記エンジンが停止したと判定することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
前記判定手段は、前記移動体の走行停止時に前記エンジンが停止したか否かの情報を前記移動体から受信することを特徴とする請求項1または2に記載のナビゲーション装置。
【請求項6】
前記案内手段により前記再起動中に出力すべき経路情報が音声出力された後、前記ナビゲーション装置の再起動がなされるか否か判定する再起動判定手段をさらに備え、
前記案内手段は、前記ナビゲーション装置の再起動がなされなかったと前記再起動判定手段が判定した以後では、前記再起動中に出力すべき経路情報の音声出力を行わないことを特徴とする請求項1乃至5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記案内手段は、前記移動体の走行停止時に前記エンジンが停止した状態が所定時間幅以上継続したと判定した場合に、前記再起動中に出力すべき経路情報を、予め音声出力することを特徴とする請求項1乃至6のいずれか一項に記載のナビゲーション装置。
【請求項8】
前記所定の走行時間は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される時間とされることを特徴とする請求項1乃至7のいずれか一項に記載のナビゲーション装置。
【請求項9】
前記所定の走行距離は、前記移動体が走行を開始した時に開始した前記ナビゲーション装置の再起動の動作が完了するまでに想定される走行距離とされることを特徴とする請求項1乃至8のいずれか一項に記載のナビゲーション装置。
【請求項10】
バッテリ及びエンジンを有する移動体の前記バッテリを電源とするナビゲーション装置により実行される制御方法であって、
前記移動体の走行停止時に前記エンジンが停止したか否か判定する判定工程と、
前記移動体の走行停止時に前記エンジンが停止したと前記判定工程が判定した場合、前記移動体が走行を開始した後、所定の走行時間が経過するか又は所定の走行距離を走行する間に出力すべき経路情報を、予め音声出力する案内工程と、
を備えることを特徴とする制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−2975(P2013−2975A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−134760(P2011−134760)
【出願日】平成23年6月17日(2011.6.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月17日(2011.6.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]