
ナビゲーション装置及び方法
【課題】 実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることが可能なナビゲーション装置及び方法を提供する。
【解決手段】 ナビゲーション装置1は、目的地までの経路を求め、求めた経路に従って車両を誘導するものである。また、ナビゲーション装置1は算出した経路のうち、分岐路を有するノード地点に自車両が接近したときに、予め記憶した地図情報から、そのノード地点をいずれの方向に進行すべきか判断する。そして、ナビゲーション装置1は、判断した方向を運転者に提示する。ここで、提示した方向と実際に自車両が走行した方向とが異なる場合、ナビゲーション装置1は、自車両が実際に走行した方向をそのノード地点と対応付けて記憶する。そして、ナビゲーション装置1は、自車両が記憶したノード地点を再度走行する場合、予め記憶した地図情報に加えて記憶した方向から、進行すべき方向を判断し、提示する。
【解決手段】 ナビゲーション装置1は、目的地までの経路を求め、求めた経路に従って車両を誘導するものである。また、ナビゲーション装置1は算出した経路のうち、分岐路を有するノード地点に自車両が接近したときに、予め記憶した地図情報から、そのノード地点をいずれの方向に進行すべきか判断する。そして、ナビゲーション装置1は、判断した方向を運転者に提示する。ここで、提示した方向と実際に自車両が走行した方向とが異なる場合、ナビゲーション装置1は、自車両が実際に走行した方向をそのノード地点と対応付けて記憶する。そして、ナビゲーション装置1は、自車両が記憶したノード地点を再度走行する場合、予め記憶した地図情報に加えて記憶した方向から、進行すべき方向を判断し、提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置及び方法に関する。
【背景技術】
【0002】
従来、誘導経路上で誘導対象交差点ノードから進入ノード方向に延長した直線を基準方向とし、この基準方向をもとに交差点回りの角度範囲を、直線方向角度範囲、右折方向角度範囲、及び左折方向角度範囲に分割し、誘導対象交差点ノードと脱出ノードとを結ぶ方向が、いずれの角度範囲に属するかにより、交差点において直進、右折及び左折のいずれの案内を行うかを決定するナビゲーション装置が知られている(例えば特許文献1参照)。
【特許文献1】特許3056816号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来のナビゲーション装置は、予め記憶された地図データベースの内容に基づいて、直進、右折及び左折のいずれの案内を行うかを決定しているため、実際の道路形状と記憶内容とが異なる交差点等においては、正確に案内されない可能性があった。
【0004】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることが可能なナビゲーション装置及び方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明のナビゲーション装置は、目的地までの経路を求め、求めた経路に従って車両を誘導するものであって、第1記憶手段と、経路算出手段と、進行方向判断手段と、提示手段と、第2記憶手段とを備えている。第1記憶手段は地図情報を記憶するものであり、経路算出手段は第1記憶手段により記憶された地図情報から、目的地までの経路を算出するものである。また、進行方向判断手段は、経路算出手段により算出された経路のうち、分岐路を有するノード地点に自車両が接近したときに、第1記憶手段により記憶される地図情報から、そのノード地点をいずれの方向に進行すべきか判断するものである。提示手段は、進行方向判断手段により判断された方向を運転者に提示するものである。第2記憶手段は、提示手段により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて記憶するものである。さらに、上記進行方向判断手段は、自車両がそのノード地点を再度走行する場合、第2記憶手段により記憶された方向から、進行すべき方向を判断するものである。
【発明の効果】
【0006】
本発明によれば、記憶される地図情報が実際の道路情報と一致しない場合であっても、自車両が過去に地図情報に無い方向に走行した場合には、そのときに走行した方向が記憶され、次回以降の処理に用いられることとなる。この結果、実際の道路形状と記憶内容とが異なる交差点等を再度走行する場合に誤った案内が行われる可能性を減じることができる。従って、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0008】
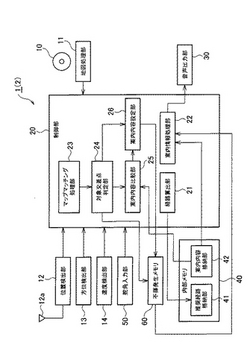
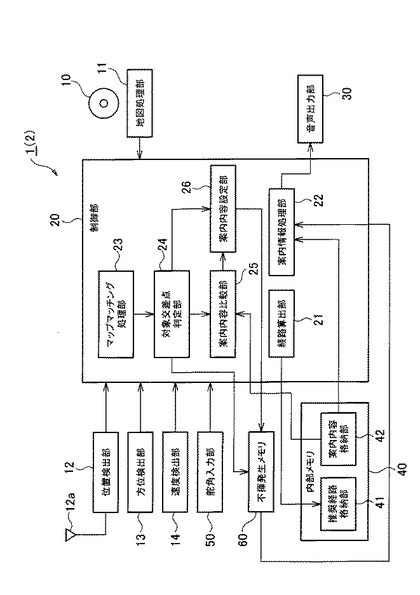
図1は、本発明の第1実施形態に係るナビゲーション装置の構成図である。図1に示すように、第1実施形態に係るナビゲーション装置1は、目的地までの経路を求め、求めた経路に従って車両を誘導するものである。このナビゲーション装置1は、第1記憶部(第1記憶手段)10、地図処理部11、位置検出部12、方位検出部13、速度検出部14、制御部20、音声出力部30、及び内部メモリ40を有している。
【0009】
第1記憶部10は、例えばCD−ROMによって構成され、交差点の位置データ等の各種の道路情報を含む地図情報、及び経路誘導を行う際に必要とされる音声情報などのデータを記憶している。この第1記憶部10は、地図処理部11によってデータが読み取られ、読み取られたデータが制御部20に入力されるようになっている。
【0010】
位置検出部12は、例えばGPS受信機によって構成され、アンテナ12aから受信した信号に基づいて自車の現在地の緯度及び経度、すなわち現在地情報を検出する構成となっている。方位検出部13は、自車の走行に伴う方位の変化を検出するものであって、例えば地磁気センサやジャイロ等によって構成されている。また、速度検出部14は、自車の速度を検出するものであって、例えば車輪近傍に設けられて車輪の回転を検出するセンサなどを含んで構成されている。また、これらの検出部12〜14は制御部20に接続され、検出した情報を制御部20に送信するようになっている。
【0011】
制御部20は、入力した情報に基づいて、目的地までの経路を求めたり、経路誘導の際の音声を出力するように音声出力部30に指示したりするものである。音声出力部30は、音声にて運転者に経路案内するようになっており、例えば交差点に差し掛かったときに左折や右折などの方向を運転者に音声報知する構成となっている。
【0012】
ここで、制御部20及び内部メモリ40の詳細構成を説明する。制御部20は、経路算出部(経路算出手段)21と、案内情報処理部(進行方向判断手段)22、マップマッチング処理部23と、対象交差点判定部24と、案内内容比較部25と、案内内容設定部26とからなっている。また、内部メモリ40は、推奨経路格納部41と、案内内容格納部42とからなっている。
【0013】
経路算出部21は、第1記憶部10により記憶された地図情報から、目的地までの経路を算出するものである。具体的に経路算出部21は、位置検出部12によって検出された現在地を始点ノードとし、目的地を終点ノードとしたうえで、ダイクストラ法等に基づいて始点ノードから終点ノードに至る推奨経路を算出する構成となっている。また、経路算出部21は、内部メモリ40に接続され、算出した経路情報を内部メモリ40に送信する構成となっている。
【0014】
内部メモリ40の推奨経路格納部41は、経路算出部21からの経路情報を読み込んで、一時的に格納しておくものである。また、推奨経路格納部41は、経路算出部21によって新たに経路が算出されると、新たな経路を格納する構成となっている。
【0015】
案内内容格納部42は、推奨経路格納部41に格納される経路情報から得られる案内内容を格納するものである。ここで、案内内容とは、分岐路を有するノード地点の情報と、そのノード地点において分岐路を有する方向の情報との少なくとも2つをいう。
【0016】
制御部20の案内情報処理部22は、案内内容格納部42に格納される案内内容の基づいて、ノード地点に自車両が接近したときにそのノード地点をいずれの方向に進行すべきか判断するものである。また、案内情報処理部22は、音声出力部30に接続されており、判断した進行方向の情報を音声出力部30に送信するようになっている。これにより、音声出力部30は、案内情報処理部22により判断された進行方向を運転者に提示することとなる。
【0017】
また、制御部20のマップマッチング処理部23は、方位検出部13と速度検出部14とによって検出される方位データ及び速度データから推定される推定位置や、位置検出部12によって検出される測位位置を自車の現在位置とし、この位置を地図情報に重ね合わせるものである。
【0018】
対象交差点判定部24は、マップマッチング処理部23によるマップマッチングの結果に基づき、自車両が交差点などの分岐路を有するノード地点に接近しているか否かを判断するものである。
【0019】
また、上記ナビゲーション装置1は、舵角入力部50及び不揮発性メモリ(第2記憶手段)60を備えている。舵角入力部50は、例えばステアリングの回転角を検出する舵角センサにより構成され、ステアリングに回転トルクが加わるとその回転角に応じて角度の信号を出力する構成となっている。この舵角入力部50は、案内内容比較部25に接続され、回転角の信号を案内内容比較部25に送信する構成となっている。
【0020】
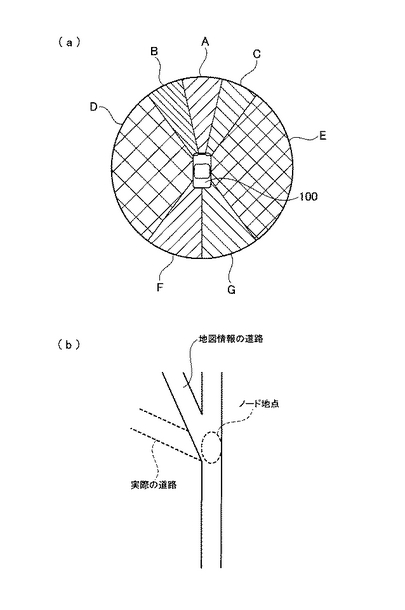
案内内容比較部25は、自車両がノード地点を走行したときに、音声出力部30により出力された誘導方向と実際に自車両が走行した方向とが異なるか否かを比較判断するものである。比較判断の際、案内内容比較部25は図2に示すようなデータを参照する。
【0021】
図2は、案内内容比較部25が参照する方向等の説明図であり、(a)は各方向を示しており、(b)は地図情報に記憶される道路と実際の道路との方向を示している。
【0022】
同図に示すように、本ナビゲーション装置1は、図2(a)に示すように車両100の前方約20°の範囲内(領域A)の方向を直進方向と規定している。また、ナビゲーション装置1は、領域Aの左側約20°の範囲内(領域B)の方向をベアレフト方向と規定し、領域Aの右側約20°の範囲内(領域C)の方向をベアライト方向と規定している。さらに、ナビゲーション装置1は、車両100の左側約110°の範囲内(領域D)の方向を左折方向と規定し、車両100の右側約110°の範囲内(領域E)の方向を右折方向と規定している。また、ナビゲーション装置1は、車両100の左後方約40°の範囲内(領域F)の方向を鋭角左折方向と規定し、車両100の右後方約40°の範囲内(領域G)の方向をUターン方向と規定している。
【0023】
案内内容比較部25は、上記図2(a)を参照して音声出力部30により出力された誘導方向と実際に自車両が走行した方向とが異なるか否かを比較判断する。このため、図2(b)に示すように、ノード地点において音声出力部30によりベアレフト方向が提示されたにもかかわらず、実際には自車両が左折方向に走行した場合、案内内容比較部25は、これらの方向が異なると判断する。
【0024】
再度、図1を参照する。案内内容設定部26は、音声出力部30により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて不揮発性メモリ60に記憶させるものである。このため、不揮発性メモリ60は、両方向が異なる場合、実際に自車両が走行した方向をそのノード地点と対応付けて記憶する記憶部として機能することとなる。
【0025】
また、上記の対象交差点判定部24は、自車両がノード地点に接近していると判断した場合、そのノード地点を過去に走行したことがあるか否かを判断する機能も備えている。さらに、対象交差点判定部24はそのノード地点を過去に走行したことがあると判断した場合、不揮発性メモリ60の記憶内容を案内情報処理部22に送信させるようになっている。ここで、過去において提示された誘導方向と実際に走行した方向とが異なっていた場合、不揮発性メモリ60には実際に走行した方向の情報が記憶されている。このため、案内情報処理部22は、自車両がノード地点を再度走行し、過去において提示された誘導方向と実際に走行した方向とが異なっていた場合、不揮発性メモリ60により記憶された方向とから、進行すべき方向を判断することとなる。他方、案内情報処理部22は、過去において両方向が異なっていなかった場合、そのノード地点について不揮発性メモリ60に方向の情報が記憶されていないため、地図情報から進行すべき方向を判断することとなる。
【0026】
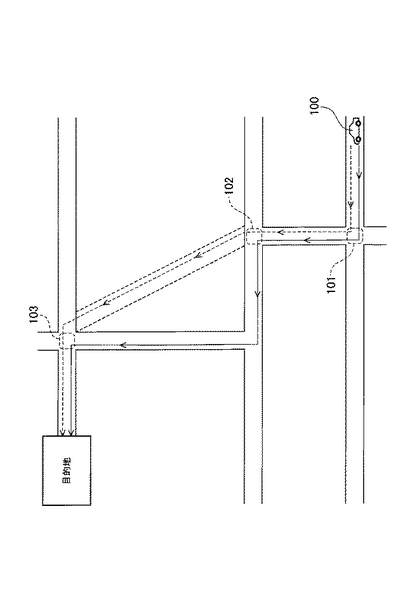
次に、第1実施形態に係るナビゲーション方法を説明する。図3は、第1実施形態に係るナビゲーション方法の説明図である。なお、同図において、実線は経路算出部21により算出された推奨経路を示し、破線は実際に車両100が走行した経路を示している。
【0027】
まず、車両運転者が目的地を設定すると、経路算出部21は、位置検出部12により検出された自車両100の現在地と目的地と第1記憶部10の地図情報とから推奨経路を求める(第1ステップ)。そして、内部メモリ40の推奨経路格納部41は推奨経路の情報を格納する。また、案内内容格納部42は、推奨経路から得られるノード地点101〜103の情報を格納すると共に、地図情報に基づいてそのノード地点101〜103での進行可能な方向の情報を格納する。
【0028】
次いで、自車両100が第1ノード地点101に差し掛かったとすると、案内情報処理部22は右折すべきと判断する。このとき、自車両100は第1ノード地点101を走行したことが無いため、案内情報処理部22は、地図情報から第1ノード地点101における進行方向を判断する(第2ステップ)。そして、案内情報処理部22は、第1ノード地点101を右折すべきと判断して音声出力部30に右折方向の提示を指示する。これにより、音声出力部30は右折する旨の提示を行う(第4ステップ)。
【0029】
そして、運転者は車両を右折させるべくハンドル操作を行う。このとき、舵角入力部50は操舵角を検出して案内内容比較部25に送信する。案内内容比較部25は、舵角入力部50からの信号が示す自車両100の走行方向と、音声出力部30により提示された方向とが一致するか否かを判断する。ここで、両者は一致するため、案内内容設定部26は第1ノード地点101について不揮発性メモリ60に方向の情報を記憶させないこととなる。
【0030】
次いで、自車両100が第2ノード地点102に差し掛かったとすると、案内情報処理部22は左折すべきと判断し(第2ステップ)、音声出力部30に左折方向の提示を指示する。これにより、音声出力部30は左折する旨の提示を行う(第4ステップ)。
【0031】
また、このとき、舵角入力部50は操舵角を検出して案内内容比較部25に送信し、案内内容比較部25は、舵角入力部50からの信号が示す自車両100の走行方向と、音声出力部30により提示された方向とが一致するか否かを判断する。ここで、両者は相違するため、案内内容設定部26は第2ノード地点102について不揮発性メモリ60にベアレフト方向の情報を記憶させる。その後、車両100は第3ノード地点103を経て目的地に到達する。
【0032】
次に、自車両100が再度ノード地点101〜103を経て、目的地まで走行しようとしているとする。そして、自車両100が再度第1ノード地点101に差し掛かったとする。このとき、案内情報処理部22は、第1ノード地点101において過去に提示された方向と実際に自車両が走行した方向とが同じであるため、地図情報から第1ノード地点101を右折すべきと判断する(第2ステップ)。そして、音声出力部30は右折する旨の提示を行う(第4ステップ)。
【0033】
次いで、自車両100が再度第2ノード地点102に差し掛かったとする。このとき、案内情報処理部22は、第2ノード地点102において過去に提示された方向と実際に自車両が走行した方向とが異なるため、地図情報と不揮発性メモリ60の記憶内容とから第2ノード地点102をベアレフト方向に走行すべきと判断する(第3ステップ)。そして、音声出力部30はベアレフト方向に走行する旨の提示を行う(第4ステップ)。
【0034】
このように、本実施形態のナビゲーション方法では、過去の提示方向と実際の走行方向とが異なっていた場合に、実際の走行方向の情報を記憶して、次回以降の走行に利用することとしている。このため、次回以降の走行については、実際の道路形状と記憶内容とが異なる交差点等においても、右左折等の案内の正確性を向上させることができる。
【0035】
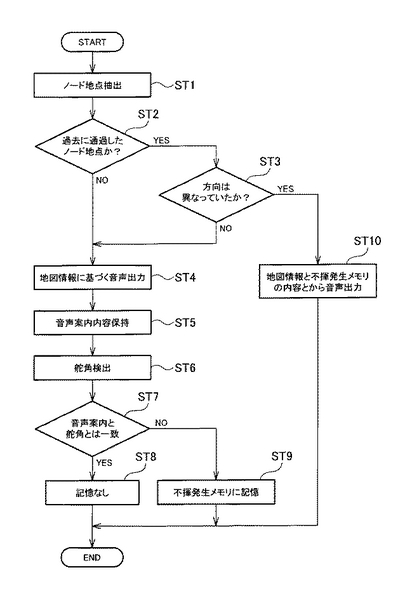
次に、図4を参照して、第1実施形態に係るナビゲーション方法の詳細を説明する。図4は、第1実施形態に係るナビゲーション方法の詳細を示すフローチャートである。同図に示すように、ナビゲーション装置1において、経路算出部21は推奨経路を求め、推奨経路格納部41は推奨経路を格納する。そして、案内内容格納部42は推奨経路からノード地点の情報を抽出する(ST1)。
【0036】
次いで、対象交差点判定部24は接近中のノード地点が過去に走行したものであるか否かを判断する(ST2)。ここで、過去に走行したものでないと判断した場合(ST2:NO)、処理はステップST4に進む。一方、過去に走行したものであると判断した場合(ST2:YES)、案内情報処理部22は、そのノード地点について過去に提示した方向と実際に走行した方向とが異なっているか否かを判断する(ST3)。そして、過去に提示した方向と実際に走行した方向とが異なっていないと判断した場合(ST3:NO)、処理はステップST4に進む。
【0037】
ステップST4において、案内情報処理部22は地図情報に基づいて進行すべき方向を判断し、音声出力部30は案内情報処理部22が判断した方向に進むように音声出力する(ST4)。その後、案内内容比較部25は音声出力した音声案内内容を保持する(ST5)。次に、舵角入力部50は操舵角を検出する(ST6)。
【0038】
そして、案内内容比較部25は、操舵角の情報を入力し、保持した音声案内と舵角とが一致するか否かを判断する(ST7)。ここで、一致すると判断した場合(ST7:YES)、不揮発性メモリ60は実際に走行した方向の情報を記憶せず(ST8)、その後処理は終了する。また、一致しないと判断した場合(ST7:NO)、不揮発性メモリ60は実際に走行した方向の情報を記憶し(ST9)、その後処理は終了する。
【0039】
ところで、過去に提示した方向と実際に走行した方向とが異なっていたと判断した場合(ST3:YES)、ステップST9に示すように不揮発性メモリ60には方向の情報が記憶されている。このため、案内情報処理部22は、地図情報と不揮発性メモリ60の記憶内容とに基づいて進行すべき方向を判断し、音声出力部30は案内情報処理部22が判断した方向に進むように音声出力する(ST10)。その後、処理は終了する。
【0040】
そして、例えば車両電源がオフされるまで上記ステップST1〜ST10の処理が繰り返されることとなる。
【0041】
このようにして、本実施形態に係るナビゲーション装置1及びナビゲーション方法によれば、ノード地点において提示された方向と実際に自車両が走行した方向とが異なる場合、その方向を記憶し、そのノード地点を再度走行する場合、地図情報と実際に自車両が走行した方向とから、進行すべき方向を判断することとしている。このため、記憶される地図情報が実際の道路情報と一致しない場合であっても、自車両が過去に地図情報に存在しない方向に走行した場合には、そのときに走行した方向が記憶され、次回以降の処理に用いられることとなる。この結果、実際の道路形状と記憶内容とが異なる交差点等を再度走行する場合に誤った案内が行われる可能性を減じることができる。従って、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【0042】
次に、本発明の第2実施形態を説明する。第2実施形態に係るナビゲーション装置2は、第1実施形態のものと同様であるが、処理内容の一部が第1実施形態のものと異なっている。以下、第1実施形態との相違点を説明する。
【0043】
第1実施形態において不揮発性メモリ60は、音声出力部30により音声案内された方向と実際に自車両が走行した方向とが異なるノード地点について、ノード地点の情報と実際に走行した方向とを対応付けて記憶することとしていた。これに対し、第2実施形態において不揮発性メモリ60は、音声出力部30により音声案内された方向と、実際に自車両が走行した方向とが異なるというだけでは記憶しないこととしている。すなわち、不揮発性メモリ60は、上記両方向が異なるノード地点が、過去に経路算出部21により算出された経路を自車両が走行しようとしてその経路から外れたことがある地点である場合に、実際に走行した方向とそのノード地点とを対応付けて記憶するようにしている。つまり、不揮発性メモリ60は、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に自車両が走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することとなる。
【0044】
これにより、舵角入力部(検出手段)50の検出誤差を考慮に入れて不揮発性メモリ60に記憶させることができる。例えば、交差点でほぼ直角に左折した場合、舵角入力部50は90度の角度を検出するはずである。ところが、舵角入力部50が検出ミスにより60度などと検出してしまったとする。このとき、第1実施形態の不揮発性メモリ60は、60度の方向を実際に走行した方向として記憶してしまう。故に、第1実施形態に係るナビゲーション装置1は、次にその交差点を走行する場合、検出ミスによって得られた60度の方向を案内してしまう。
【0045】
しかし、第2実施形態に係るナビゲーション装置2は、過去に経路を外れたことがあるノード地点について、音声案内された方向と舵角入力部50により検出された方向とが異なる場合に、舵角入力部50により検出された方向とそのノード地点とを対応付けて記憶している。ここで、過去に経路を外れたことがあるノード地点とは、運転者が運転を誤った地点であることから、そのノード地点で音声案内された方向と、舵角入力部50が示す方向とが異なっていれば、舵角入力部50の検出誤差であるとは考えにくい。故に、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することで、精度良く不揮発性メモリ60に記憶を行わせることができる。
【0046】
次に、第2実施形態に係るナビゲーション装置の動作の概略を説明する。まず、自車両の運転者は目的地を設定する。そして、自車両は目的地までの推奨経路に沿って走行する。ところが、運転者が或るノード地点を通過する際に、推奨経路と異なる方向に進んでしまったとする。このとき、ナビゲーション装置1は、推奨経路を外れて走行していることを検出し、推奨経路と異なった方向に進んでしまったノード地点の情報を不揮発性メモリ60に記憶させる。
【0047】
次に、次回以降の走行時にナビゲーション装置2は再度推奨経路を求め、目的地まで音声案内を行っていく。次いで、自車両が、或るノード地点に差し掛かったとする。このとき、制御部20は、不揮発性メモリ60の記憶内容から、過去に経路外れを起こしたノード地点であるか否かを判断する。
【0048】
そして、自車両が差し掛かったノード地点が過去に経路外れを起こしたことがないノード地点である場合、ナビゲーション装置2は通常の通り音声案内を行う。すなわち、第2実施形態に係るナビゲーション装置2では、過去経路外れを起こしたことがないノード地点に差し掛かった場合、地図情報に基づいて音声案内を行うこととなる。
【0049】
一方、自車両が差し掛かったノード地点が過去に経路外れを起こしたノード地点である場合、ナビゲーション装置2は、音声案内された方向と舵角入力部50により検出された方向とが一致するか否かを判断し、これら方向が異なる場合に舵角入力部50により検出された方向を不揮発性メモリ60に記憶させる。
【0050】
このようにして、第2実施形態に係るナビゲーション装置2及びナビゲーション方法によれば、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【0051】
さらに、第2実施形態によれば、過去に経路を外れたことがあるノード地点について、音声案内された方向と舵角入力部50により検出された方向とが異なる場合に、舵角入力部50により検出された方向とそのノード地点とを対応付けて記憶している。ここで、過去に経路を外れたことがあるノード地点とは運転者が運転を誤った地点である。このため、そのノード地点で音声案内された方向と、舵角入力部50が示す方向とが異なっていれば、舵角入力部50の検出誤差であるとは考えにくい。故に、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することで、精度良く不揮発性メモリ60に記憶を行わせることができる。
【0052】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で、変更を加えてもよい。
【0053】
例えば、上記実施形態では、音声出力部30による音声内容と実際に走行した方向とが一度異なれば、不揮発性メモリ60に方向の情報を記憶していたが、同地点において数回に亘り方向が異なると判断された場合に、不揮発性メモリ60に方向の情報を記憶するようにしてもよい。これにより、舵角の検出ミスによる情報記憶を防止することができる。
【0054】
また、自車両が実際に走行した方向は舵角入力部50による情報のみならず、方位検出部13からの情報に基づいて求めるようにしてもよいし、舵角入力部50と方位検出部13との双方の情報に基づいて求めるようにしてもよい。これにより、双方の情報を平均化して実際の道路の形状を性格に求めることができる。
【図面の簡単な説明】
【0055】
【図1】本発明の第1実施形態に係るナビゲーション装置の構成図である。
【図2】案内内容比較部が参照する方向等の説明図であり、(a)は各方向を示しており、(b)は地図情報に記憶される道路と実際の道路との方向を示している。
【図3】第1実施形態に係るナビゲーション方法の説明図である。
【図4】第1実施形態に係るナビゲーション方法の詳細を示すフローチャートである。
【符号の説明】
【0056】
1,2…ナビゲーション装置
10…第1記憶部(第1記憶手段)
11…地図処理部
12…位置検出部
13…方位検出部
14…速度検出部
20…制御部
21…経路算出部(経路算出手段)
22…案内情報処理部(進行方向判断手段)
23…マップマッチング処理部
24…対象交差点判定部
25…案内内容比較部
26…案内内容設定部
30…音声出力部(提示手段)
40…内部メモリ
41…推奨経路格納部
42…案内内容格納部
50…舵角入力部(検出手段)
60…不揮発性メモリ(第2記憶手段)
100…自車両
101〜103…ノード地点
【技術分野】
【0001】
本発明は、ナビゲーション装置及び方法に関する。
【背景技術】
【0002】
従来、誘導経路上で誘導対象交差点ノードから進入ノード方向に延長した直線を基準方向とし、この基準方向をもとに交差点回りの角度範囲を、直線方向角度範囲、右折方向角度範囲、及び左折方向角度範囲に分割し、誘導対象交差点ノードと脱出ノードとを結ぶ方向が、いずれの角度範囲に属するかにより、交差点において直進、右折及び左折のいずれの案内を行うかを決定するナビゲーション装置が知られている(例えば特許文献1参照)。
【特許文献1】特許3056816号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来のナビゲーション装置は、予め記憶された地図データベースの内容に基づいて、直進、右折及び左折のいずれの案内を行うかを決定しているため、実際の道路形状と記憶内容とが異なる交差点等においては、正確に案内されない可能性があった。
【0004】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることが可能なナビゲーション装置及び方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明のナビゲーション装置は、目的地までの経路を求め、求めた経路に従って車両を誘導するものであって、第1記憶手段と、経路算出手段と、進行方向判断手段と、提示手段と、第2記憶手段とを備えている。第1記憶手段は地図情報を記憶するものであり、経路算出手段は第1記憶手段により記憶された地図情報から、目的地までの経路を算出するものである。また、進行方向判断手段は、経路算出手段により算出された経路のうち、分岐路を有するノード地点に自車両が接近したときに、第1記憶手段により記憶される地図情報から、そのノード地点をいずれの方向に進行すべきか判断するものである。提示手段は、進行方向判断手段により判断された方向を運転者に提示するものである。第2記憶手段は、提示手段により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて記憶するものである。さらに、上記進行方向判断手段は、自車両がそのノード地点を再度走行する場合、第2記憶手段により記憶された方向から、進行すべき方向を判断するものである。
【発明の効果】
【0006】
本発明によれば、記憶される地図情報が実際の道路情報と一致しない場合であっても、自車両が過去に地図情報に無い方向に走行した場合には、そのときに走行した方向が記憶され、次回以降の処理に用いられることとなる。この結果、実際の道路形状と記憶内容とが異なる交差点等を再度走行する場合に誤った案内が行われる可能性を減じることができる。従って、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の好適な実施形態を図面に基づいて説明する。
【0008】
図1は、本発明の第1実施形態に係るナビゲーション装置の構成図である。図1に示すように、第1実施形態に係るナビゲーション装置1は、目的地までの経路を求め、求めた経路に従って車両を誘導するものである。このナビゲーション装置1は、第1記憶部(第1記憶手段)10、地図処理部11、位置検出部12、方位検出部13、速度検出部14、制御部20、音声出力部30、及び内部メモリ40を有している。
【0009】
第1記憶部10は、例えばCD−ROMによって構成され、交差点の位置データ等の各種の道路情報を含む地図情報、及び経路誘導を行う際に必要とされる音声情報などのデータを記憶している。この第1記憶部10は、地図処理部11によってデータが読み取られ、読み取られたデータが制御部20に入力されるようになっている。
【0010】
位置検出部12は、例えばGPS受信機によって構成され、アンテナ12aから受信した信号に基づいて自車の現在地の緯度及び経度、すなわち現在地情報を検出する構成となっている。方位検出部13は、自車の走行に伴う方位の変化を検出するものであって、例えば地磁気センサやジャイロ等によって構成されている。また、速度検出部14は、自車の速度を検出するものであって、例えば車輪近傍に設けられて車輪の回転を検出するセンサなどを含んで構成されている。また、これらの検出部12〜14は制御部20に接続され、検出した情報を制御部20に送信するようになっている。
【0011】
制御部20は、入力した情報に基づいて、目的地までの経路を求めたり、経路誘導の際の音声を出力するように音声出力部30に指示したりするものである。音声出力部30は、音声にて運転者に経路案内するようになっており、例えば交差点に差し掛かったときに左折や右折などの方向を運転者に音声報知する構成となっている。
【0012】
ここで、制御部20及び内部メモリ40の詳細構成を説明する。制御部20は、経路算出部(経路算出手段)21と、案内情報処理部(進行方向判断手段)22、マップマッチング処理部23と、対象交差点判定部24と、案内内容比較部25と、案内内容設定部26とからなっている。また、内部メモリ40は、推奨経路格納部41と、案内内容格納部42とからなっている。
【0013】
経路算出部21は、第1記憶部10により記憶された地図情報から、目的地までの経路を算出するものである。具体的に経路算出部21は、位置検出部12によって検出された現在地を始点ノードとし、目的地を終点ノードとしたうえで、ダイクストラ法等に基づいて始点ノードから終点ノードに至る推奨経路を算出する構成となっている。また、経路算出部21は、内部メモリ40に接続され、算出した経路情報を内部メモリ40に送信する構成となっている。
【0014】
内部メモリ40の推奨経路格納部41は、経路算出部21からの経路情報を読み込んで、一時的に格納しておくものである。また、推奨経路格納部41は、経路算出部21によって新たに経路が算出されると、新たな経路を格納する構成となっている。
【0015】
案内内容格納部42は、推奨経路格納部41に格納される経路情報から得られる案内内容を格納するものである。ここで、案内内容とは、分岐路を有するノード地点の情報と、そのノード地点において分岐路を有する方向の情報との少なくとも2つをいう。
【0016】
制御部20の案内情報処理部22は、案内内容格納部42に格納される案内内容の基づいて、ノード地点に自車両が接近したときにそのノード地点をいずれの方向に進行すべきか判断するものである。また、案内情報処理部22は、音声出力部30に接続されており、判断した進行方向の情報を音声出力部30に送信するようになっている。これにより、音声出力部30は、案内情報処理部22により判断された進行方向を運転者に提示することとなる。
【0017】
また、制御部20のマップマッチング処理部23は、方位検出部13と速度検出部14とによって検出される方位データ及び速度データから推定される推定位置や、位置検出部12によって検出される測位位置を自車の現在位置とし、この位置を地図情報に重ね合わせるものである。
【0018】
対象交差点判定部24は、マップマッチング処理部23によるマップマッチングの結果に基づき、自車両が交差点などの分岐路を有するノード地点に接近しているか否かを判断するものである。
【0019】
また、上記ナビゲーション装置1は、舵角入力部50及び不揮発性メモリ(第2記憶手段)60を備えている。舵角入力部50は、例えばステアリングの回転角を検出する舵角センサにより構成され、ステアリングに回転トルクが加わるとその回転角に応じて角度の信号を出力する構成となっている。この舵角入力部50は、案内内容比較部25に接続され、回転角の信号を案内内容比較部25に送信する構成となっている。
【0020】
案内内容比較部25は、自車両がノード地点を走行したときに、音声出力部30により出力された誘導方向と実際に自車両が走行した方向とが異なるか否かを比較判断するものである。比較判断の際、案内内容比較部25は図2に示すようなデータを参照する。
【0021】
図2は、案内内容比較部25が参照する方向等の説明図であり、(a)は各方向を示しており、(b)は地図情報に記憶される道路と実際の道路との方向を示している。
【0022】
同図に示すように、本ナビゲーション装置1は、図2(a)に示すように車両100の前方約20°の範囲内(領域A)の方向を直進方向と規定している。また、ナビゲーション装置1は、領域Aの左側約20°の範囲内(領域B)の方向をベアレフト方向と規定し、領域Aの右側約20°の範囲内(領域C)の方向をベアライト方向と規定している。さらに、ナビゲーション装置1は、車両100の左側約110°の範囲内(領域D)の方向を左折方向と規定し、車両100の右側約110°の範囲内(領域E)の方向を右折方向と規定している。また、ナビゲーション装置1は、車両100の左後方約40°の範囲内(領域F)の方向を鋭角左折方向と規定し、車両100の右後方約40°の範囲内(領域G)の方向をUターン方向と規定している。
【0023】
案内内容比較部25は、上記図2(a)を参照して音声出力部30により出力された誘導方向と実際に自車両が走行した方向とが異なるか否かを比較判断する。このため、図2(b)に示すように、ノード地点において音声出力部30によりベアレフト方向が提示されたにもかかわらず、実際には自車両が左折方向に走行した場合、案内内容比較部25は、これらの方向が異なると判断する。
【0024】
再度、図1を参照する。案内内容設定部26は、音声出力部30により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて不揮発性メモリ60に記憶させるものである。このため、不揮発性メモリ60は、両方向が異なる場合、実際に自車両が走行した方向をそのノード地点と対応付けて記憶する記憶部として機能することとなる。
【0025】
また、上記の対象交差点判定部24は、自車両がノード地点に接近していると判断した場合、そのノード地点を過去に走行したことがあるか否かを判断する機能も備えている。さらに、対象交差点判定部24はそのノード地点を過去に走行したことがあると判断した場合、不揮発性メモリ60の記憶内容を案内情報処理部22に送信させるようになっている。ここで、過去において提示された誘導方向と実際に走行した方向とが異なっていた場合、不揮発性メモリ60には実際に走行した方向の情報が記憶されている。このため、案内情報処理部22は、自車両がノード地点を再度走行し、過去において提示された誘導方向と実際に走行した方向とが異なっていた場合、不揮発性メモリ60により記憶された方向とから、進行すべき方向を判断することとなる。他方、案内情報処理部22は、過去において両方向が異なっていなかった場合、そのノード地点について不揮発性メモリ60に方向の情報が記憶されていないため、地図情報から進行すべき方向を判断することとなる。
【0026】
次に、第1実施形態に係るナビゲーション方法を説明する。図3は、第1実施形態に係るナビゲーション方法の説明図である。なお、同図において、実線は経路算出部21により算出された推奨経路を示し、破線は実際に車両100が走行した経路を示している。
【0027】
まず、車両運転者が目的地を設定すると、経路算出部21は、位置検出部12により検出された自車両100の現在地と目的地と第1記憶部10の地図情報とから推奨経路を求める(第1ステップ)。そして、内部メモリ40の推奨経路格納部41は推奨経路の情報を格納する。また、案内内容格納部42は、推奨経路から得られるノード地点101〜103の情報を格納すると共に、地図情報に基づいてそのノード地点101〜103での進行可能な方向の情報を格納する。
【0028】
次いで、自車両100が第1ノード地点101に差し掛かったとすると、案内情報処理部22は右折すべきと判断する。このとき、自車両100は第1ノード地点101を走行したことが無いため、案内情報処理部22は、地図情報から第1ノード地点101における進行方向を判断する(第2ステップ)。そして、案内情報処理部22は、第1ノード地点101を右折すべきと判断して音声出力部30に右折方向の提示を指示する。これにより、音声出力部30は右折する旨の提示を行う(第4ステップ)。
【0029】
そして、運転者は車両を右折させるべくハンドル操作を行う。このとき、舵角入力部50は操舵角を検出して案内内容比較部25に送信する。案内内容比較部25は、舵角入力部50からの信号が示す自車両100の走行方向と、音声出力部30により提示された方向とが一致するか否かを判断する。ここで、両者は一致するため、案内内容設定部26は第1ノード地点101について不揮発性メモリ60に方向の情報を記憶させないこととなる。
【0030】
次いで、自車両100が第2ノード地点102に差し掛かったとすると、案内情報処理部22は左折すべきと判断し(第2ステップ)、音声出力部30に左折方向の提示を指示する。これにより、音声出力部30は左折する旨の提示を行う(第4ステップ)。
【0031】
また、このとき、舵角入力部50は操舵角を検出して案内内容比較部25に送信し、案内内容比較部25は、舵角入力部50からの信号が示す自車両100の走行方向と、音声出力部30により提示された方向とが一致するか否かを判断する。ここで、両者は相違するため、案内内容設定部26は第2ノード地点102について不揮発性メモリ60にベアレフト方向の情報を記憶させる。その後、車両100は第3ノード地点103を経て目的地に到達する。
【0032】
次に、自車両100が再度ノード地点101〜103を経て、目的地まで走行しようとしているとする。そして、自車両100が再度第1ノード地点101に差し掛かったとする。このとき、案内情報処理部22は、第1ノード地点101において過去に提示された方向と実際に自車両が走行した方向とが同じであるため、地図情報から第1ノード地点101を右折すべきと判断する(第2ステップ)。そして、音声出力部30は右折する旨の提示を行う(第4ステップ)。
【0033】
次いで、自車両100が再度第2ノード地点102に差し掛かったとする。このとき、案内情報処理部22は、第2ノード地点102において過去に提示された方向と実際に自車両が走行した方向とが異なるため、地図情報と不揮発性メモリ60の記憶内容とから第2ノード地点102をベアレフト方向に走行すべきと判断する(第3ステップ)。そして、音声出力部30はベアレフト方向に走行する旨の提示を行う(第4ステップ)。
【0034】
このように、本実施形態のナビゲーション方法では、過去の提示方向と実際の走行方向とが異なっていた場合に、実際の走行方向の情報を記憶して、次回以降の走行に利用することとしている。このため、次回以降の走行については、実際の道路形状と記憶内容とが異なる交差点等においても、右左折等の案内の正確性を向上させることができる。
【0035】
次に、図4を参照して、第1実施形態に係るナビゲーション方法の詳細を説明する。図4は、第1実施形態に係るナビゲーション方法の詳細を示すフローチャートである。同図に示すように、ナビゲーション装置1において、経路算出部21は推奨経路を求め、推奨経路格納部41は推奨経路を格納する。そして、案内内容格納部42は推奨経路からノード地点の情報を抽出する(ST1)。
【0036】
次いで、対象交差点判定部24は接近中のノード地点が過去に走行したものであるか否かを判断する(ST2)。ここで、過去に走行したものでないと判断した場合(ST2:NO)、処理はステップST4に進む。一方、過去に走行したものであると判断した場合(ST2:YES)、案内情報処理部22は、そのノード地点について過去に提示した方向と実際に走行した方向とが異なっているか否かを判断する(ST3)。そして、過去に提示した方向と実際に走行した方向とが異なっていないと判断した場合(ST3:NO)、処理はステップST4に進む。
【0037】
ステップST4において、案内情報処理部22は地図情報に基づいて進行すべき方向を判断し、音声出力部30は案内情報処理部22が判断した方向に進むように音声出力する(ST4)。その後、案内内容比較部25は音声出力した音声案内内容を保持する(ST5)。次に、舵角入力部50は操舵角を検出する(ST6)。
【0038】
そして、案内内容比較部25は、操舵角の情報を入力し、保持した音声案内と舵角とが一致するか否かを判断する(ST7)。ここで、一致すると判断した場合(ST7:YES)、不揮発性メモリ60は実際に走行した方向の情報を記憶せず(ST8)、その後処理は終了する。また、一致しないと判断した場合(ST7:NO)、不揮発性メモリ60は実際に走行した方向の情報を記憶し(ST9)、その後処理は終了する。
【0039】
ところで、過去に提示した方向と実際に走行した方向とが異なっていたと判断した場合(ST3:YES)、ステップST9に示すように不揮発性メモリ60には方向の情報が記憶されている。このため、案内情報処理部22は、地図情報と不揮発性メモリ60の記憶内容とに基づいて進行すべき方向を判断し、音声出力部30は案内情報処理部22が判断した方向に進むように音声出力する(ST10)。その後、処理は終了する。
【0040】
そして、例えば車両電源がオフされるまで上記ステップST1〜ST10の処理が繰り返されることとなる。
【0041】
このようにして、本実施形態に係るナビゲーション装置1及びナビゲーション方法によれば、ノード地点において提示された方向と実際に自車両が走行した方向とが異なる場合、その方向を記憶し、そのノード地点を再度走行する場合、地図情報と実際に自車両が走行した方向とから、進行すべき方向を判断することとしている。このため、記憶される地図情報が実際の道路情報と一致しない場合であっても、自車両が過去に地図情報に存在しない方向に走行した場合には、そのときに走行した方向が記憶され、次回以降の処理に用いられることとなる。この結果、実際の道路形状と記憶内容とが異なる交差点等を再度走行する場合に誤った案内が行われる可能性を減じることができる。従って、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【0042】
次に、本発明の第2実施形態を説明する。第2実施形態に係るナビゲーション装置2は、第1実施形態のものと同様であるが、処理内容の一部が第1実施形態のものと異なっている。以下、第1実施形態との相違点を説明する。
【0043】
第1実施形態において不揮発性メモリ60は、音声出力部30により音声案内された方向と実際に自車両が走行した方向とが異なるノード地点について、ノード地点の情報と実際に走行した方向とを対応付けて記憶することとしていた。これに対し、第2実施形態において不揮発性メモリ60は、音声出力部30により音声案内された方向と、実際に自車両が走行した方向とが異なるというだけでは記憶しないこととしている。すなわち、不揮発性メモリ60は、上記両方向が異なるノード地点が、過去に経路算出部21により算出された経路を自車両が走行しようとしてその経路から外れたことがある地点である場合に、実際に走行した方向とそのノード地点とを対応付けて記憶するようにしている。つまり、不揮発性メモリ60は、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に自車両が走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することとなる。
【0044】
これにより、舵角入力部(検出手段)50の検出誤差を考慮に入れて不揮発性メモリ60に記憶させることができる。例えば、交差点でほぼ直角に左折した場合、舵角入力部50は90度の角度を検出するはずである。ところが、舵角入力部50が検出ミスにより60度などと検出してしまったとする。このとき、第1実施形態の不揮発性メモリ60は、60度の方向を実際に走行した方向として記憶してしまう。故に、第1実施形態に係るナビゲーション装置1は、次にその交差点を走行する場合、検出ミスによって得られた60度の方向を案内してしまう。
【0045】
しかし、第2実施形態に係るナビゲーション装置2は、過去に経路を外れたことがあるノード地点について、音声案内された方向と舵角入力部50により検出された方向とが異なる場合に、舵角入力部50により検出された方向とそのノード地点とを対応付けて記憶している。ここで、過去に経路を外れたことがあるノード地点とは、運転者が運転を誤った地点であることから、そのノード地点で音声案内された方向と、舵角入力部50が示す方向とが異なっていれば、舵角入力部50の検出誤差であるとは考えにくい。故に、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することで、精度良く不揮発性メモリ60に記憶を行わせることができる。
【0046】
次に、第2実施形態に係るナビゲーション装置の動作の概略を説明する。まず、自車両の運転者は目的地を設定する。そして、自車両は目的地までの推奨経路に沿って走行する。ところが、運転者が或るノード地点を通過する際に、推奨経路と異なる方向に進んでしまったとする。このとき、ナビゲーション装置1は、推奨経路を外れて走行していることを検出し、推奨経路と異なった方向に進んでしまったノード地点の情報を不揮発性メモリ60に記憶させる。
【0047】
次に、次回以降の走行時にナビゲーション装置2は再度推奨経路を求め、目的地まで音声案内を行っていく。次いで、自車両が、或るノード地点に差し掛かったとする。このとき、制御部20は、不揮発性メモリ60の記憶内容から、過去に経路外れを起こしたノード地点であるか否かを判断する。
【0048】
そして、自車両が差し掛かったノード地点が過去に経路外れを起こしたことがないノード地点である場合、ナビゲーション装置2は通常の通り音声案内を行う。すなわち、第2実施形態に係るナビゲーション装置2では、過去経路外れを起こしたことがないノード地点に差し掛かった場合、地図情報に基づいて音声案内を行うこととなる。
【0049】
一方、自車両が差し掛かったノード地点が過去に経路外れを起こしたノード地点である場合、ナビゲーション装置2は、音声案内された方向と舵角入力部50により検出された方向とが一致するか否かを判断し、これら方向が異なる場合に舵角入力部50により検出された方向を不揮発性メモリ60に記憶させる。
【0050】
このようにして、第2実施形態に係るナビゲーション装置2及びナビゲーション方法によれば、実際の道路形状と記憶内容とが異なる交差点等において右左折等の案内の正確性を向上させることができる。
【0051】
さらに、第2実施形態によれば、過去に経路を外れたことがあるノード地点について、音声案内された方向と舵角入力部50により検出された方向とが異なる場合に、舵角入力部50により検出された方向とそのノード地点とを対応付けて記憶している。ここで、過去に経路を外れたことがあるノード地点とは運転者が運転を誤った地点である。このため、そのノード地点で音声案内された方向と、舵角入力部50が示す方向とが異なっていれば、舵角入力部50の検出誤差であるとは考えにくい。故に、過去に経路を外れたことがあるノード地点について、音声案内された方向と実際に走行した方向とが異なる場合に、実際に走行した方向とそのノード地点とを対応付けて記憶することで、精度良く不揮発性メモリ60に記憶を行わせることができる。
【0052】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で、変更を加えてもよい。
【0053】
例えば、上記実施形態では、音声出力部30による音声内容と実際に走行した方向とが一度異なれば、不揮発性メモリ60に方向の情報を記憶していたが、同地点において数回に亘り方向が異なると判断された場合に、不揮発性メモリ60に方向の情報を記憶するようにしてもよい。これにより、舵角の検出ミスによる情報記憶を防止することができる。
【0054】
また、自車両が実際に走行した方向は舵角入力部50による情報のみならず、方位検出部13からの情報に基づいて求めるようにしてもよいし、舵角入力部50と方位検出部13との双方の情報に基づいて求めるようにしてもよい。これにより、双方の情報を平均化して実際の道路の形状を性格に求めることができる。
【図面の簡単な説明】
【0055】
【図1】本発明の第1実施形態に係るナビゲーション装置の構成図である。
【図2】案内内容比較部が参照する方向等の説明図であり、(a)は各方向を示しており、(b)は地図情報に記憶される道路と実際の道路との方向を示している。
【図3】第1実施形態に係るナビゲーション方法の説明図である。
【図4】第1実施形態に係るナビゲーション方法の詳細を示すフローチャートである。
【符号の説明】
【0056】
1,2…ナビゲーション装置
10…第1記憶部(第1記憶手段)
11…地図処理部
12…位置検出部
13…方位検出部
14…速度検出部
20…制御部
21…経路算出部(経路算出手段)
22…案内情報処理部(進行方向判断手段)
23…マップマッチング処理部
24…対象交差点判定部
25…案内内容比較部
26…案内内容設定部
30…音声出力部(提示手段)
40…内部メモリ
41…推奨経路格納部
42…案内内容格納部
50…舵角入力部(検出手段)
60…不揮発性メモリ(第2記憶手段)
100…自車両
101〜103…ノード地点
【特許請求の範囲】
【請求項1】
目的地までの経路を求め、求めた経路に従って車両を誘導するナビゲーション装置であって、
地図情報を記憶する第1記憶手段と、
前記第1記憶手段により記憶された地図情報から、目的地までの経路を算出する経路算出手段と、
前記経路算出手段により算出された経路のうち、分岐路を有するノード地点に自車両が接近したときに、前記第1記憶手段により記憶される地図情報に基づいて、そのノード地点をいずれの方向に進行すべきか判断する進行方向判断手段と、
前記進行方向判断手段により判断された方向を運転者に提示する提示手段と、
前記提示手段により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて記憶する第2記憶手段と、を備え、
前記進行方向判断手段は、自車両が第2記憶手段により記憶されたノード地点を走行する場合、前記第2記憶手段により記憶された方向に基づいて、進行すべき方向を判断する
ことを特徴とするナビゲーション装置。
【請求項2】
実際に自車両が走行した方向を検出する検出手段をさらに備え、
前記第2記憶手段は、前記提示手段により提示された方向と、前記検出手段により検出された方向とが異なるノード地点が、過去に前記経路算出手段により算出された経路を走行しようとしてその経路から外れたことがあるノード地点である場合に、前記検出手段により検出された方向をそのノード地点と対応付けて記憶する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
実際に自車両が走行した方向を検出する検出手段をさらに備え、
前記第2記憶手段は、前記提示手段により提示された方向と、前記検出手段により検出された方向とがそのノード地点ついて複数回に亘って異なる場合に、前記検出手段により検出された方向をそのノード地点と対応付けて記憶する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
目的地までの経路を求め、求めた経路に従って車両を誘導するナビゲーション方法であって、
記憶された地図情報から、目的地までの経路を算出する第1ステップと、
前記第1ステップにおいて算出された経路のうち分岐路を有するノード地点に自車両が接近した場合、そのノード地点を自車両が走行したことがないときに、又は、そのノード地点を自車両が走行したことがあり、そのノード地点において過去に誘導された方向と実際に自車両が走行した方向とが同じであったときに、記憶される地図情報に基づいて、そのノード地点をいずれの方向に進行すべきか判断する第2ステップと、
前記第1ステップにおいて算出された経路のうち分岐路を有するノード地点に自車両が接近した場合、そのノード地点を自車両が走行したことがあり、そのノード地点において過去に誘導された方向と実際に自車両が走行した方向とが異なっていたときに、過去に実際に自車両が走行した方向に基づいて、そのノード地点をいずれの方向に進行すべきか判断する第3ステップと、
前記第2ステップ又は前記第3ステップにおいて判断された方向を運転者に提示する第4ステップと、
を有することを特徴とするナビゲーション方法。
【請求項1】
目的地までの経路を求め、求めた経路に従って車両を誘導するナビゲーション装置であって、
地図情報を記憶する第1記憶手段と、
前記第1記憶手段により記憶された地図情報から、目的地までの経路を算出する経路算出手段と、
前記経路算出手段により算出された経路のうち、分岐路を有するノード地点に自車両が接近したときに、前記第1記憶手段により記憶される地図情報に基づいて、そのノード地点をいずれの方向に進行すべきか判断する進行方向判断手段と、
前記進行方向判断手段により判断された方向を運転者に提示する提示手段と、
前記提示手段により提示された方向と実際に自車両が走行した方向とが異なる場合に、実際に自車両が走行した方向をそのノード地点と対応付けて記憶する第2記憶手段と、を備え、
前記進行方向判断手段は、自車両が第2記憶手段により記憶されたノード地点を走行する場合、前記第2記憶手段により記憶された方向に基づいて、進行すべき方向を判断する
ことを特徴とするナビゲーション装置。
【請求項2】
実際に自車両が走行した方向を検出する検出手段をさらに備え、
前記第2記憶手段は、前記提示手段により提示された方向と、前記検出手段により検出された方向とが異なるノード地点が、過去に前記経路算出手段により算出された経路を走行しようとしてその経路から外れたことがあるノード地点である場合に、前記検出手段により検出された方向をそのノード地点と対応付けて記憶する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
実際に自車両が走行した方向を検出する検出手段をさらに備え、
前記第2記憶手段は、前記提示手段により提示された方向と、前記検出手段により検出された方向とがそのノード地点ついて複数回に亘って異なる場合に、前記検出手段により検出された方向をそのノード地点と対応付けて記憶する
ことを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
目的地までの経路を求め、求めた経路に従って車両を誘導するナビゲーション方法であって、
記憶された地図情報から、目的地までの経路を算出する第1ステップと、
前記第1ステップにおいて算出された経路のうち分岐路を有するノード地点に自車両が接近した場合、そのノード地点を自車両が走行したことがないときに、又は、そのノード地点を自車両が走行したことがあり、そのノード地点において過去に誘導された方向と実際に自車両が走行した方向とが同じであったときに、記憶される地図情報に基づいて、そのノード地点をいずれの方向に進行すべきか判断する第2ステップと、
前記第1ステップにおいて算出された経路のうち分岐路を有するノード地点に自車両が接近した場合、そのノード地点を自車両が走行したことがあり、そのノード地点において過去に誘導された方向と実際に自車両が走行した方向とが異なっていたときに、過去に実際に自車両が走行した方向に基づいて、そのノード地点をいずれの方向に進行すべきか判断する第3ステップと、
前記第2ステップ又は前記第3ステップにおいて判断された方向を運転者に提示する第4ステップと、
を有することを特徴とするナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−250565(P2006−250565A)
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願番号】特願2005−63998(P2005−63998)
【出願日】平成17年3月8日(2005.3.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願日】平成17年3月8日(2005.3.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]