
ナビゲーション装置
【課題】オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能なナビゲーション装置を得るとともに、この種のナビゲーションを実現できるナビゲーション方法を得ることにある。
【解決手段】自車位置を求める自車位置決定手段3cと、目的地までの案内ルートを探索する案内ルート探索手段3iとを備えたナビゲーション装置を構成するに、自車位置より走行前進側にある案内ルートRoに関し、現在の自車状況から見て、当該案内ルートRoに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段3fを備え、障害事情判定手段3fにより障害事情が存在すると判定された場合に、障害事情の存在下で到達すると予想される地点を出発地として、案内ルート探索手段3iを働かせて、出発地から目的地までの新たな案内ルートRnを探索するオフルート予備対策手段3hを備える。
【解決手段】自車位置を求める自車位置決定手段3cと、目的地までの案内ルートを探索する案内ルート探索手段3iとを備えたナビゲーション装置を構成するに、自車位置より走行前進側にある案内ルートRoに関し、現在の自車状況から見て、当該案内ルートRoに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段3fを備え、障害事情判定手段3fにより障害事情が存在すると判定された場合に、障害事情の存在下で到達すると予想される地点を出発地として、案内ルート探索手段3iを働かせて、出発地から目的地までの新たな案内ルートRnを探索するオフルート予備対策手段3hを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置に関する。
【背景技術】
【0002】
この種のナビゲーション装置は運転席の横等に搭載され、出発地から目的地までの案内ルートを例えば液晶ディスプレイ装置に表示して、運転者に目的地までの適切なルート(案内ルート)を提供することで、運転支援を行う。
【0003】
今日、この種の案内ルートの探索は、交通情報センターに集められた渋滞や道路規制、工事、交通事故等の情報と、主要幹線道路上に数百mから数kmの距離で設定された“リンク”を通過するのに必要な時間情報とを組み合わせて行われる。
【0004】
この種の案内ルートが求められたナビゲーション状態において、所謂、オフルート判定を実行するものが提案されている。
この構成のナビゲーション装置には、自車位置が案内ルートから外れているか否かを判定するオフルート判定手段が備えられ、このオフルート判定手段により自車位置が案内ルートから外れていると判定された場合には、その判定時点(その判定時に自車がいる位置)から、案内ルート探索手段を働かせて目的地までの新たな案内ルートを探索する。
従って、使用者は、オフルート状態に陥った状態で、ナビゲーション装置から新たに探索して求められた案内ルートの提供を受け、的確に目的地に到達することができる。
【0005】
この形態のオフルート対策の問題点を図12(イ)(ロ)に基づいて説明する。
図12は、この種のオフルートが発生する状況を示しており、車は一方向について複数レーンがある道路上を走行するものとする。図12において、道路が共に一方通行道路であるとともに、図上左右方向に走る左右走行路が4車線の左右行走行路raを示しており、図上上下方向に走る上下走行路が3車線の上下走行路を示している。さらに、前記上下方向路としては、図上左側にある左上下走行路rblと、右側にある右上下走行路rbrとが存在するものとする。
【0006】
上記構成の道路網に対して、案内ルート探索手段により探索・提案される案内ルートRoは、図上左下の出発地点S側から右上下走行路rbrの先にある目的地D側に設定されるものとする。
このような道路網において、自車は逐次、ナビゲーション装置からナビゲーションを受けることになるのであるが、この構成の道路網において、左上下走行路rblに図上左下地点から進入しようとする場合、左上下走行路rblから右上下走行路rbrとの間にある左右走行路部位(この部位を中間路部位rmと呼ぶ)においては、右上下走行路rbrに進入するために、できるだけ上側にある走行レーンを採る必要がある。
【0007】
しかしながら、図2(ロ)に示すように、この中間路部位において何らかの事情により、最も下側の走行レーンにしか進入できない場合が発生する。この種の問題は、例えば、中間路部位rmが渋滞状態にあり、自車が適切なレーン選択をできない場合、あるいは、使用者がレーン選択を意識せず、単に最も下側のレーンに進入してしまった場合である。
この状況にあっても、ナビゲーション装置にあっては、前記中間路部位rmにおいては、車は一応中間路部位rmに進入しているため、オフルートと判定することはない。
【0008】
さて、中間路部位rmにおいてレーン選択を誤り、車が左右走行路raを直進せざる得ない場合は車は直進し、実際にオフルートしてしまう。
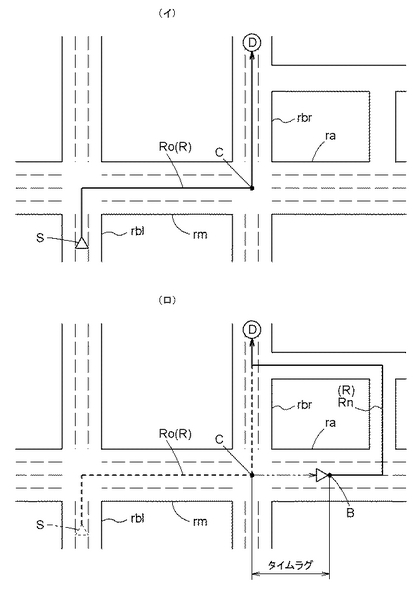
この状況はナビゲーション装置により認識され、この段階で(図12(イ)において地点Cに到達した状態で)、初めてオフルート対策手段が働き、図12(ロ)に示すように現在位置を出発地とし、目的地までのルート探索を行う。結果、新たに求められた案内ルートによるナビゲーションに、地点C−B間のタイムラグで示す空白期間を生じ、好ましくない。
【0009】
このような空白期間の発生を抑制する技術として、案内ルートからの逸脱を想定して、その逸脱後の案内ルートを予め求めておこうとする技術が提示されている(特許文献1)。
さらに、この特許文献1における計算量の低減を目的として、案内交通点に関してのみ予備ルートを求めておこうとする技術がある(特許文献2)。
【特許文献1】特開平8−30193号公報(特許請求の範囲)
【特許文献2】特開2003−344077号公報(特許請求の範囲)
【発明の開示】
【発明が解決しようとする課題】
【0010】
上記のように、案内ルートからの逸脱を予測して、予め予備的なルートを準備しておく技術においては、逸脱の可能性が実効的且つ具体的に判断されないため、比較的多くの予備的な案内ルートを用意しておく必要があり、計算量が多くなるとともに、記憶しておく計算結果のデータ量も多くなるという問題がある。
【0011】
上記のような状態に鑑みて、本発明の目的は、オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能で、且つ、予備的な案内ルートを予め求めておく構成においても、その準備を効率的に行うことが可能なナビゲーション装置を得るとともに、この種のナビゲーションを実現できるナビゲーション方法を得ることにある。
【課題を解決するための手段】
【0012】
上記目的を達成するための、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置の特徴構成は、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段を備え、前記障害事情判定手段により前記障害事情が存在すると判定された場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策手段を備えたことにある。
【0013】
このナビゲーション装置には、障害事情判定手段を備え、この手段により、自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無が判定される。そして、障害事情が存在すると判定された場合は、オフルート予備対策手段が働き、現在の自車状況において案内ルートを外れて到達すると予想される地点を出発地として案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索する。
【0014】
この場合の探索手法は従来型のオフルート対策手段によるものと同様である。但し、その出発地の設定が、現在の自車状況において、案内ルートを外れ、障害事情の下に到達しうる地点となるのみである。
【0015】
そして、この構成にあっては、障害事情判定手段による判定をおこない、その判定結果として、自車が案内ルートを外れる可能性がある場合に、その外れる走行ルートに基づいた新たな案内ルートの探索を、障害事情判定手段による判定が行われる時点で実行する。
【0016】
結果、従来型のオフルートが発生した状態で、新たなルート探索を実行する場合に比較して、自車がオフルートする可能性がある段階で、新たなルート探索を行うこととなり、結果的に先に説明したナビゲーションの空白域を低減することができる。
【0017】
さらに、案内ルートを逸脱した場合に採用すべき予備的な案内ルートを進路変更地点毎に求めるのではなく、現状の走行状態等を考慮して、実際に障害事情が存在すると判定した場合に、新たな案内ルートを探索するため、実効的且つ具体的な状況に対応して、必要最小限の新たな案内ルート探索をおこなうだけの構成とできる。
【0018】
さて、この構成の場合、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置におけるナビゲーション方法は、以下の特徴手段を備えることとなる。
即ち、自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定し、
前記障害事情が存在すると判定した場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策を実行し、
新たに探索された案内ルートに従ってナビゲーションを行うのである。
【0019】
さて、上記構成のナビゲーション装置において、
前記自車位置決定手段が、自車が走行している自車のレーン位置を求める自車レーン位置決定手段を備え、
前記障害事情判定手段が、前記自車レーン位置決定手段により決定される前記自車のレーン位置に基づいて、前記障害事情の存在を判定することが好ましい。
現今のナビゲーション装置にあっては、自車位置を走行路における走行レーン単位で検出することが可能となりつつある。例えば、自車位置の概略をGPS等の装置から決定するとともに、自車に備えられている車載カメラから路上にある白線、路肩位置等を決定し、予め求められている自車位置の地図情報から、その地点におけるレーン数、白線数、路肩の特徴等を割り出し、車載カメラから得られる撮像情報及び地図情報から得られる走行レーン数に関する情報に基づいて、自車が現在走行している走行レーンを決定することができる。
【0020】
一方、先に本願が解決しようとする課題の項で説明したように、自車が現在走行している走行レーンは、走行ルートの選択に関しては重要な要素である。
例えば、案内ルートとしては、走行前進側に右折もしくは左折の必要な地点が存在するにも係らず、左折もしくは右折が可能な走行レーンを自車が走行していない場合等にあっては、将来的に案内レーンに沿った走行が困難であると判断する必要が生じる。
そこで、自車レーン位置決定手段を備えるとともに、その決定結果に基づいて、前記障害事情判定手段が案内ルートに沿った走行の可否を判定することが有効であり、本願に係る、新たな案内ルート探索を有効に予備的且つ実効的に行うことができる。
【0021】
この装置の場合、自車が走行している自車のレーン位置を求め、
前記障害事情判定を行うに、前記自車のレーン位置に基づいて、前記障害事情の存在を判定するナビゲーション装置におけるナビゲーション方法を実行することとなる。
【0022】
さて、前記障害事情判定手段による判定において、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記判定を行うことが好ましい。
【0023】
自車が走行している走行地点にあっては、自車の走行レーンによっては、通行区分、法規制によって、案内ルートに沿った走行である左折、右折が出来なかったりすることがある。さらに、近接しつつある進路案内地点までの距離が短いにも関らず走行レーンを走行していない場合は、同様に案内ルートに沿った走行である左折、右折が出来なかったりすることがある。さらに、自車の周りに多くの車が存在している場合は、レーン変更自体が行い難くなる。また、自車の走行速度が大きい場合は、同様に、進路案内地点である案内ルートに沿った走行である左折、右折が出来なかったりする。
【0024】
そこで、これらの各要件のうちのいずれかを考慮して、障害事情判定手段が判定を行う。このようにすることで、現在の自車状況に的確に対応したナビゲーションを行うことができる。
【0025】
これまで説明してきたナビゲーション装置において、前記障害事情判定手段による障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段を備えることが好ましい。
【0026】
本願にあっては、自車が案内ルートに沿って走行できるか否かを判定するため、その判定を必要とする案内ルート上の地点と、必ずしも必要でない地点も存在する。例えば、判定の進路変更地点である交差点に近づく走行状態において、その交差点において案内ルートが左折又は右折している場合、その交差点から所定の距離にある位置で、障害事情判定は必然的に必要となる。一方、道なりの走行では、必ずしも障害事情判定を必要とするものではない。従って、障害事情判定位置決定手段を設け、例えば、特定の交差点から所定の距離にある区間又は地点を障害事情判定位置とすることにより、的確に案内ルートとの関係で決る障害事情判定位置を設定することができ、不要な判定処理を低減することができる。
【0027】
前記障害事情判定位置決定手段が、前記自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点との関係に基づいて、前記障害事情判定を行う前記障害事情判定位置を決定する構成で、
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離が可変とされていることが好ましい。
このように、前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離を可変とするには、自車が走行している道路地点における車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記距離を可変決定することができる。
【0028】
先に示したように、例えば、近接しつつある進路変更地点である交差点において左折をする必要がある場合に、上記のように、自車が走行している地点における車線情報、通行区分、法規制、自車の周りを走行する走行体に関する情報である周囲走行体、あるいは自車の走行状態によって、案内ルートに沿った走行が可能か否かが判明する。そこで、障害事情判定位置を、この種の状況に従って変えるのである。
例えば、左折レーンまでのレーン数が多い場合、通行区分、法規制によって左折できない場合、渋滞しており左折できない場合、走行速度が高く左折、レーン選択に所定以上の走行距離を要する場合等にあっては、障害事情判定位置から案内ルートに存する進路変更地点までの距離を伸ばしておく。この様にすることで、新たな案内ルートの探索を早期に行い、オフルート状態に陥った場合にも、空白期間を低減した状態で、ナビゲーションを行える。
【0029】
これまで説明してきたナビゲーション装置において、自車位置が案内ルートから外れているか否かを判定するオフルート判定手段を備え、
オフルート判定手段により自車位置が前記案内ルートから外れる可能性が高いと判定された場合に、前記案内ルート探索手段を働かせて前記目的地までの新たな案内ルートを探索するオフルート対策手段を備えることが好ましい。
【0030】
オフルート判定手段及びオフルート対策手段は、自車が実際に案内ルートからオフルートした状態において、新たな案内ルートを現在位置から求める手段であり、これら手段を設けることで、従来型のオフルート対策を講じることができる。
【0031】
さて、案内ルート探索は、前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行するものとできる。即ち、案内ルートの探索は、本願にあっては、どのような形態で行われてもよい。ここで、走行レーン単位で案内ルートを提供できる場合は、従来より確度の高い案内を行うことができる。
【発明を実施するための最良の形態】
【0032】
第一実施の形態
以下に、本発明の第一実施の形態について図面に基づいて説明する。
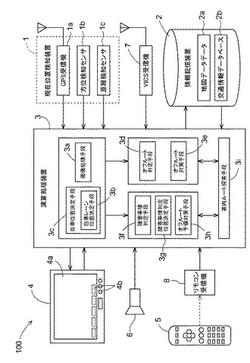
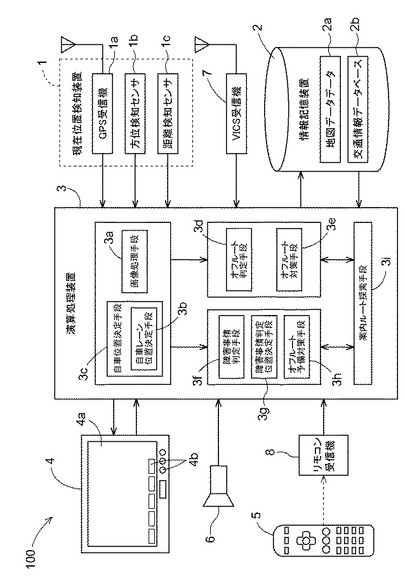
図1は、本実施形態に係るナビゲーション装置100のハードウェア構成の概略を示すブロック図である。
【0033】
図1に示すように、本実施形態に係るナビゲーション装置100は、主たる構成として、現在位置検知装置1、情報記憶装置2、演算処理装置3、表示入力装置4、リモコン入力装置5、車載カメラ6及びVICS受信機7を備えている。
【0034】
現在位置検知装置1は、ここでは、GPS受信機1a、方位検知センサ1b、及び距離検知センサ1cを備えて構成されている。
GPS受信機1aは、人工衛星からの信号を受信する装置であり、信号の発信時刻(現時刻)、GPS受信機1aの位置情報、GPS受信機1aの移動速度、GPS受信機1aの進行方向など様々な情報を得ることができる。
方位検知センサ1bは、地磁気センサやジャイロセンサ、或いは、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り付ける角度センサ等により構成され、車両の進行方向を検知することができる。
距離検知センサ1cは、車輪の回転数を検知するセンサや車両の加速度を検知するセンサと検知された加速度を2回積分する回路との組み合わせ等により構成され、車両の移動距離を検知することができる。
【0035】
VICS(Vehicle Information and Communication System:登録商標)受信機7は、道路上の所定の地点に設置された信号発信機から発信された信号を受信する装置であり、VICSの光ビーコン及び電波ビーコンや、FM放送に多重されたVICS信号を受信することができる装置としている。演算処理装置3は、このVICS受信機7が受信した信号から、渋滞情報、現在位置情報、駐車場情報等の各種交通情報を取得することができる。
【0036】
情報記憶装置2は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有して構成される。そして、ここでは、情報記憶装置2には、地図データベース2aと、交通情報データベース2b等が格納されている。
【0037】
地図データベース2aは、表示入力装置4の後述する表示部4aに表示するための地図情報を記憶しているデータベースであるとともに、自車レーン位置を決定するための情報を記憶したデータベースである。
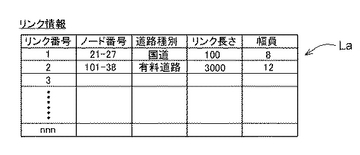
地図情報は、道路レイヤ、施設等の背景情報を有する背景レイヤ、市町村名など文字を表示するための文字レイヤ等を有して構成されている。このうち、道路レイヤは、緯度及び経度で表現された地図上の位置情報を有する多数のノードNと、2つのノードNを連結して道路を構成する多数のリンクLとを有して構成されている。各リンクLは、そのリンク情報Laとして、図4に示すように、リンク番号、両端のノードNのノード番号、道路の種別(高速道路、有料道路、国道、県道等の種別)、リンク長さ及び幅員等の道路属性情報を備えている。
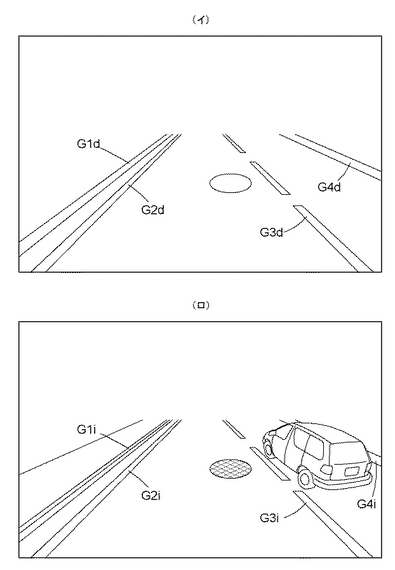
さらに、この地図データベース2aには、演算処理装置3に備えられる自車レーン位置決定手段3bにおいて使用するための、各道路における道路中心線G4dから道路幅方向における白線G2d、破線G3d、路端G1dの位置等が記憶されている(図3(イ)参照)。これらの情報は、車載カメラ6から取り込まれる画像と比較対照され、自車のレーン位置の決定に供される。
【0038】
また、この地図データベース2aには、演算処理装置3に備えられる障害事情判定手段3fにおいて使用するために、各道路に関して各地点の車線情報、通行区分情報、法規制情報が記憶されている。これらの情報は、自車の現在位置、案内ルートにおける最初の進路変更地点との関係で呼び出されて障害事情判定の用に供される。
【0039】
交通情報データベース2bは、本実施形態においては、図5に示すように、日付(ここでは月日、1月1日〜12月31日)及び時刻毎(ここでは15分単位、00:00〜23:45)に、地図データベース2aに含まれる全リンクL(リンク番号1〜nnn)のそれぞれに対応する渋滞度及び旅行時間の情報を記憶しているデータベースである。ここで、渋滞度は、「1」〜「5」の5段階で表されており、「1」は渋滞なし、「2」はやや混雑、「3」は混雑、「4」はやや渋滞、「5」は渋滞というように、数が増えるほど渋滞度も高くなるように表現される。なお、渋滞度を「1」〜「5」の5段階に分類したのは単に一例であり、更に細分化し又は簡略化することも当然に可能である。
旅行時間は、各リンクLの一方のノードNから他方のノードNまでの距離を通過するのに要する時間であり、図5中では秒単位の数値で表されている。なお、この交通情報データベース2bに記憶される情報は、過去のVICS情報や道路交通センサスの情報、或いは自車又は他車の走行履歴情報等から得られる情報に基づいて、日付及び時刻を同じくする過去の各リンクLにおける旅行時間や混雑の程度等を統計的に処理することで得ることができる。
【0040】
図1に戻り、表示入力装置4は、地図や案内ルートR等のルート案内のための各種情報、さらには、現時点あるいは案内ルートRの近くで行われる工事に関する情報、車載カメラ6により撮像される撮像情報を表示するための表示部4aと、被案内者である車両の運転者からの入力を受け付ける入力部4bとを有して構成されている。表示部4aには、例えば、液晶表示装置、プラズマ表示装置、CRT(cathode-ray tube)表示装置等を用いることができる。また、入力部4bとしては、ここでは、表示部4aの表示画面上に設けたタッチパネルと、表示画面の周囲に配置した各種スイッチとを備えている。
【0041】
また、リモコン入力装置5は、車両の運転者からの入力を受け付けてリモートコントロールにより演算処理装置3側に送信する装置であり、送信された入力情報はリモコン受信機8を介して演算処理装置3に入力される。
【0042】
車載カメラ6は、自車の前方の情景を撮像できるように構成されており、この車載カメラ6からの撮像画像が後述する画像処理手段3aに送られて画像処理の対象となる。本願にあっては、後述するように自車レーン位置決定手段3bによる自車レーン位置の決定を行うため、この画像処理により得られた情報が利用される。
【0043】
演算処理装置3は、例えば、各種の演算処理及びナビゲーション装置の各部の動作制御を行うCPUと、このCPUが演算処理を行う際のワーキングメモリとして使用されるRAMと、CPUを動作させるための各種の動作プログラムや制御プログラム等のソフトウェアが格納されたROM等を備える構成とすることができる。そして、この演算処理装置3に、現在位置検知装置1、情報記憶装置2、表示入力装置4、リモコン入力装置5、車載カメラ6及びリモコン受信器8が接続されている。
【0044】
演算処理装置3は所定の目的を達成するためのソフトウェアが格納されており、ハードウェアとともに働いて一定の目的を達成するように構成されている。即ち、ソフトウェアとハードウェアとは、共働することで所定の目的を実現する処理手段を構成する。ここでは、図1に示すように、演算処理装置3は、画像処理手段3a、自車レーン位置決定手段3bを含む自車位置決定手段3c、オフルート判定手段3d、オフルート対策手段3e、障害事情判定手段3f、障害事情判定位置決定手段3g、オフルート予備対策手段3h、案内ルート探索手段3iを備えている。
【0045】
演算処理装置3は、所定の動作プログラム、データ、入力情報等に基づいて、主に3種の目的を達成するように構築されている。
その一は、自車位置の決定にあり、上記した現在位置検知装置1からの情報及び車載カメラ6からの情報に従って、自車レーン位置まで自車位置を決定する構成が採用されている。この目的から、図1に示す画像処理手段3a、自車レーン位置決定手段3bを備えた自車位置決定手段3cが備えられている。
その二は、オフルート時の新たな案内ルートの探索にあり、この目的からオフルート判定手段3d、オフルート対策手段3eが備えられている。
その三は、オフルートとなる前に新たな案内ルートを探索しておくことにあり、この目的から、障害事情判定手段3f、障害事情判定位置決定手段3g及びオフルート予備対策手段3hが備えられている。
【0046】
以下、夫々の手段に関して順に説明する。
1.自車位置の決定
この決定には、上述の現在位置検知装置1、情報記憶装置2及び車載カメラ6からの情報が利用される。
上記現在位置検知装置1からの情報は、自車の概略位置を5〜10m程度の範囲内で決定することができる。このようにして求められる自車の概略位置情報は、自車レーン位置決定手段3bにおける自車レーン位置の決定に使用される。
【0047】
即ち、上記地図データベース2aに記憶されている道路関連の情報から、自車の概略位置に存するレーン決定に有用となる情報が導出される。この種の情報としては、自車の概略位置におけるレーン数、白線、破線の数、さらに路肩の状態等である。
この種の情報に基づいて、自車の概略位置における路端G1d、白線G2d、破線G3d、中央白線G4dを撮像される状態で示したのが図3(イ)である。
一方、車載カメラ6からの撮像情報は画像処理手段3aに送られ、その撮像情報から自車の概略位置における道なりの特徴画像(路端G1i,白線G2i、破線G3iさらには中央白線G4i)が抽出される。図3(ロ)にこの種の例を示した。この例は、自車が片側2車線の左側走行レーンを走行している例である。
【0048】
そして、上記自車レーン位置決定手段3bにあっては、地図データベース2aからの情報(図3(イ)に相当する情報)と,画像処理手段3aにより得られた情報(図3(ロ)に相当する情報)とが道路幅方向の位置関係で比較対照され、自車レーンが決定される。この比較対照にあたっては、地図情報データベース2a側から導出される、自車が左側走行レーンにあり、自車に装備された車載カメラ6が撮像すべき画像と、自車が左側走行レーンにあり、自車に装備された車載カメラ6が撮像した実際の撮像画像との対照で、その一致度の高い側を自車の現在走行している走行レーンとする。このようにして、自車レーン位置まで決定することができる。
【0049】
2 案内ルート探索
この案内ルート探索は案内ルート探索手段3iにより実行される。
案内ルート探索手段3iは、基本的には、使用者により目的地Dが指定された際に、出発地Sから目的地Dまでの案内ルートRを探索して決定する処理を行う。ここで、出発地Sは、現在位置検知装置1により検知された自車の現在位置に基づいて定まるが、使用者が表示入力装置4の入力部4b又はリモコン入力装置5により入力して指定することもできる。
【0050】
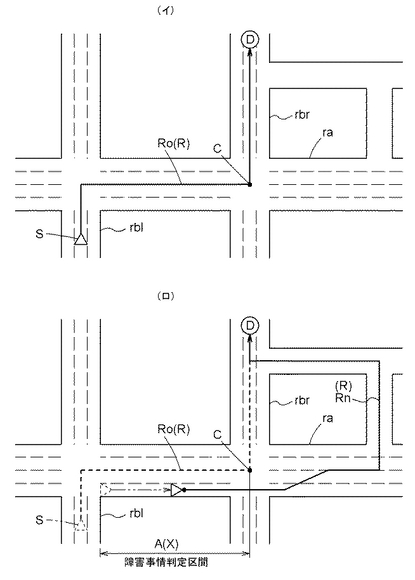
さらに、本願にあっては、案内ルート探索手段3iは、オフルート対策手段3e及びオフルート予備対策手段3hにより新たなルート探索時にも使用される。従って、オフルート対策手段3eによる新たな案内ルートの探索時おいては、その出発地Sはオフルートしていると判定された自車の現在位置となり、オフルート予備対策手段3hによる新たな案内ルートの探索時においては、障害事情判定手段3fにより自車が現在の案内ルートから外れると判定された場合に、これまで採用してきた案内ルートを外れ、この障害事情下で到達すると予想される位置となる。この位置は、図2(ロ)、図11(ロ)で示す例では、進路変更地点である図上Cで示す位置より、僅かに右側(直進側)の位置となる。
【0051】
案内ルート探索手段3iにより案内ルートRを探索して決定する処理は、公知の各種の方法により行うことができ、例えば、以下の方法により行うことができる。
【0052】
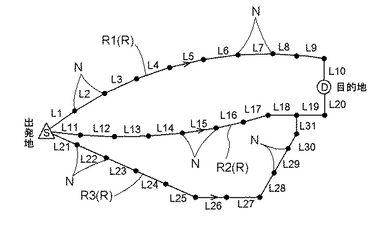
この方法は、案内ルートRを構成する各リンクLにおける旅行時間を基本とするものである。例えば、図6に示すように、出発地Sと目的地Dが決定されると、両地点を結ぶ複数のルート候補R1、R2、R3を挙げることができる。そして、各ルート候補R1、R2、R3は、そのルート候補を構成する連続したリンクL1、L2、・・の集合として認識される。これらの各リンクLについては、日付及び時刻毎に各リンクLを通過するに要する旅行時間の情報が交通情報データベース2bに記憶されている。
【0053】
すなわち、先に説明した図5に示す交通情報データベース2bによれば、いずれかの日付(例えば1月1日)及び時刻(例えば00:00)について、リンク番号で識別される各リンクL1、L2、・・・Lnnn全てに対して、その渋滞度(1〜5)及び旅行時間(例えば20秒、135秒、42秒等)が確定される。従って、全てのルート候補R1、R2、R3に対して、そのルート全体を通過するために必要となる予想所要時間を算定することが可能であり、例えば、この所要時間をルート通過に要するコストと見なして、そのコストが最低となるルート候補を案内ルートRとして決定するのである。
【0054】
なお、以上の説明では、説明を簡単にするために、コストを決定する要素として旅行時間のみに関して説明したが、従来から知られているように、各リンクLのリンク情報Laに含まれる道路の種別(高速道路、有料道路、国道、県道等の種別)や幅員、リンクL間を繋ぐノードNが交差点である場合に交差点を通過するための時間、更には、出発地からのリンクLあるいはノードNまでの距離、右左折、道路の車線数等をコスト計算に含めることも可能である。
【0055】
3 オフルート対策
オフルートに対応するために、オフルート判定手段3dとオフルート対策手段3eとの両者の手段が備えられている。この対策手段3eは、従来からナビゲーション装置100に備えられているものと同様であり、自車が案内ルートを外れて、誤った道に進入した場合に、その位置から新たな案内ルートを探索する。これら手段による処理は、図12における案内ルートRoと新たな案内ルートRnとの関係と同様である。
【0056】
従って、オフルート判定手段3dは、基本的には現在位置検知装置1から検出される自車の概略位置と案内ルートRoを道路単位で比較して、自車が案内ルートRo上にあるか否かを判断する。そして、オフルート判定手段3dにより自車位置が案内ルートRoから外れていると判定された場合に、前記オフルート対策手段3dは、自車の現在位置を出発地Sとして、これまでに設定されている目的地Dを目的地Dとして、案内ルート探索手段3iを働かせてその目的地までの新たな案内ルートRnを探索する。よって、現実にオフルートが発生した場合に、その位置から的確な案内ルートでナビゲーションを行える。
【0057】
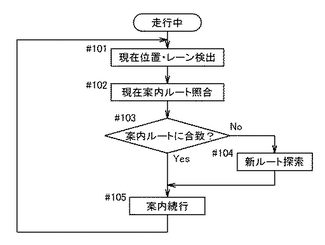
このオフルート対策の処理フローを図10に示した。同図に示すように、現在位置・レーンの検出を実行し(ステップ101)、その結果を現在の案内ルートRoと照合する(ステップ102)。照合の結果合致する場合(ステップ103:yes)はそのまま案内を続行し(ステップ105)、合致しない場合(ステップ103:no)は、新たな案内ルートRnの探索を経て(ステップ104)、その案内ルートRnによる案内を続行する(ステップ105)。
【0058】
4 オフルート予備対策
このオフルート予備対策は、自車がオフルートに陥る可能性が高いか否かに従って、陥る可能性が高い場合は、オフルートに陥った場合の新たな案内ルートRnを予め求めておくものである。従って、この目的から、障害事情判定手段3f、障害事情判定位置決定手段3g及びオフルート予備対策手段3hが備えられている。
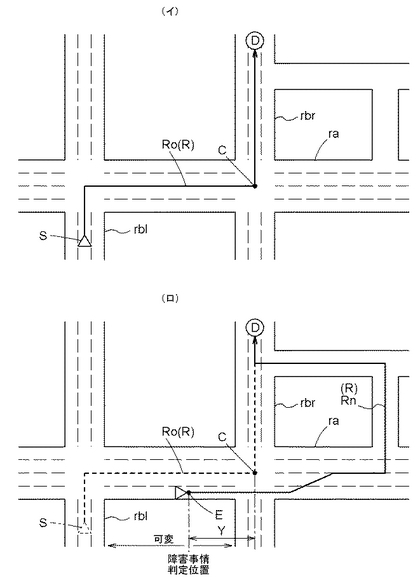
ここで、障害事情判定手段3fは、自車位置より走行前進側にある案内ルートRoに関し、現在の自車状況から見て、当該案内ルートRoに沿った走行を困難とする障害事情の有無を判定するものであり、この障害事情判定手段3fにより障害事情が存在すると判定された場合に、オフルート予備対策手段3hは、これまでの案内ルートRoを外れ、その障害事情下で到達可能な地点(例えば、図2(イ)において進路変更地点Cより僅かに直進した地点)を出発地Sとして、案内ルート探索手段3iを働かせて、その出発地Sから予め設定されている目的地Dまでの新たな案内ルートを探索する。
従って、何らかの事情により障害事情判定手段3fが、現在の案内ルートRoに沿った走行が不可能と判断した場合に、そのルートから外れる地点から目的地Dまでの新たな案内ルートの探索が実行される。
【0059】
さて、障害事情判定手段3fは、少なくとも、先に説明した自車レーン位置決定手段3bにより決定される自車のレーン位置に基づいて、案内ルートに沿った走行が可能か否かの判定を行う。
例えば、案内ルートに沿った走行において、進路変更地点(交差点等)で左折が必要な場合は、左折レーンにいる場合は障害事情無し、さらに直進レーンにいる場合や右折レーンにいる場合は障害事情がある可能性があると判定し、左折レーンから遠い程、障害事情の程度が高いと判定する。
【0060】
さらに、この判断にあっては、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある案内ルートRにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上も、その判定の要件とされる。
【0061】
通行区分、法規制の例としては、その走行地点における走行レーン変更禁止等が参考にされ、現在自車が走行している走行レーンからみて、案内ルートRo上で近づきつつある最近の左折交差点があるにもかかわらず、自車が直進レーンにいる場合に、障害事情がある可能性が高いと判断する。この場合、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0062】
自車位置より走行前進側にある前記案内ルートRoにおける最初の進路変更地点Cまでの距離情報の例としては、現在自車が走行している走行レーンからみて、案内ルートRo上で近づきつつある最近の左折交差点Cがあるにもかかわらず、自車が直進レーンにおり、さらにその交差点Cまでの距離が不足である場合に、障害事情があると判断する。この場合、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0063】
自車の周りを走行する走行体に関する情報である周囲走行体情報の例としては、現在自車の周りに多くの車が存在しさらに自車が中央側のレーンを走行している場合で、案内ルートRo上で近づきつつある最近の左折交差点Cがある場合に、障害事情があると判断する。この場合も、オフルート予備対策手段3hは、自車が接近しつつある交差点Cを直進することを要件として、新たな案内ルートRnを探索することとなる。
【0064】
自車の走行情報の例としては、自車が中央側のレーンを比較的高速で走行している場合で、案内ルートRo上で近づきつつある最近の左折交差点Cがある場合に、障害事情があると判断する。この場合も、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0065】
以上の説明においては、本願にいう障害事情判定の概念に従い任意の走行地点で障害事情判定を行う例に関して説明したが、本実施形態の場合、その判定を行う区間が決定されている。
【0066】
即ち、図1に示すように、前記障害事情判定手段3fによる障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段3gが備えられており、この障害事情判定位置決定手段3gが、自車位置より走行前進側にある前記案内ルートRoにおける最初の進路変更地点Cとの関係に基づいて、この例では前記障害事情判定区間を決定するものとされている。
従って、常時、障害事情判定手段3fによる判定が実行されることはなく、例えば、左折交差点Cから所定の距離Xにある区間内でのみ障害事情判定が実行されるように構成されている。図2(ロ)に、この区間Aを示した。
【0067】
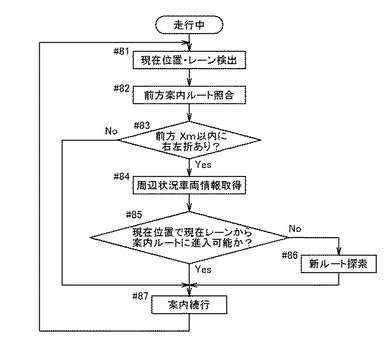
以下に、この例に係るオフルート予備対策の処理フローを図8に示した。
この処理フローは、自車が上記区間A内を走行中に逐次、繰り返し実行され、必要な場合は、新たな案内ルートRnの探索を行うものである。
【0068】
このフローにおいては、先ず、自車が走行している地図上の自車位置及び自車レーンが検出される(ステップ81)。一方、予め探索されている案内ルートRoに関して、自車の前方の進路変更地点Cについて、現状で自車が走行しているべき走行ルートとの照合が成される(ステップ82)。この照合段階で、自車が案内ルートRoに沿って走行しようとすれば、それに適合するルート上を走行しているかどうかの判定がつくこととなる。ここで、図2に示す例の場合、左折可能な最も上側の走行レーンを走行している場合は、案内ルートRoに沿っての走行が可能であり、最も下側の走行レーンを走行している場合は、オフルートの可能性が高いといえる。
【0069】
この状況で、案内ルートRoにおいて、前方所定距離Xm内に進路変更地点Cがあるか否かが判断される(ステップ83)。即ち、進路変更地点Cとの関係で障害事情判定を行う必要があるかどうかを判定するのである。図2(ロ)に示す例にあっては、区間Aで示した左右方向の距離がXに相当し、図示するような4車線の道路では200〜1000m程度に設定するのが好ましい。この判断は、自車が現状のまま走行しても案内ルートRoに沿った走行が可能かどうかの判定要件となる。従って、この判定において、自車位置が進路変更地点Cに近づき過ぎている場合はyesとなり、障害事情がある可能性が高いとの判断の下、ステップ84〜ステップ86の処理を実行する。
一方、自車と進路変更地点Cとの距離が所定以上ある場合は、現在の案内ルートRoに沿った走行が可能であると判定し、現状の案内状態を維持する(ステップ83:no)。
【0070】
ステップ83でyesと判断した場合は、自車の周辺情報、車両情報を所得する(ステップ84)。ここで、自車の周辺情報とは、先に説明したように、自車の周囲に他車が存在するか否かである。さらに、車両情報とは、自車の走行速度等である。この要件は、渋滞度が高く、走行速度が高い場合に、左折等が困難になるからである。
【0071】
以上の情報を得た上で現在の走行レーンを含む現在位置から案内ルートへの進入が可能な否かの判定を実行する(ステップ85)。例えば、自車の周りが他車で埋められており、比較的高速で走行している状態では、障害事情ありと判定し案内ルートへの進入不可と判定することとなる。一方、自車の周りに車が無く、比較的低速で走行している状態では、障害事情判定で障害事情なしと判定し、案内ルートへの進入可能と判定することとなる。この場合に、さらに現時点あるいは交差点までの通行区分、法規制等を参照して、障害事情の有無を判断してもよい。
【0072】
上記の判定を実行し、障害事情があり現状の案内ルートRoへの進入不可と判断された場合(ステップ85:no)は、新たな案内ルートRnの探索を実行する(ステップ86)。この新たな案内ルート探索は、障害事情がそのまま維持され、その事情に従った走行を行った状況において到達する地点を出発地S(図2においてC点より少し直進した位置)とするものとなる。
上記の判定を実行し、障害事情がなく、現状の案内ルートRoへの進入可と判断された場合(ステップ85:yes)は、現状の案内ルートRoに従ったナビゲーションを実行する(ステップ87)。
以上のようにして、予備的な案内ルートの探索を、実際にオフルートする可能性が高い場合に行い、限られた資源を有効利用できる。
【0073】
第2実施の形態
上記の実施の形態にあっては、障害事情判定を行う範囲を、自車から走行前進側にある案内ルートRoにおける最初の進路変更地点Cとの関係から決定するものとし、その距離Xを一定のものとして、その位置より進路変更地点C側にある所定の区間A内で障害事情判定を逐次行うものとしたが、走行状態に従って、その進路変更地点からの距離を可変として、その位置のみで判定するものとしてもよい。
【0074】
この例では、図11(ロ)に示すように、案内ルートRoにおける最初の進路変更地点Cから障害事情判定位置Eまでの距離Y自体を、自車が走行している道路地点における、車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて決定する。
【0075】
この例を、自車が案内ルートRo上にある左折交差点Cに接近している場合について、説明する(図11(ロ)参照)。これまでにも説明したように、本願にあっては、自車が走行している走行レーンは、左折レーンか直進レーンかの決定は可能とされている。そこで、例えば、左折レーンまでのレーン数が多く、走行速度が速く、さらに渋滞度が高い場合に、上記距離Yを長く取り、その位置で左折レーンに自車がない場合は、障害事情が存在すると判断する。
逆に左折レーンまでのレーン数が少なく、走行速度が遅く、さらに渋滞度が低い場合は、上記距離を短くとり、その位置で左折レーンに自車がない場合は、障害事情が存在すると判断する。
このようにすると、左折交差点Cまでの距離と走行レーンとの関係で、障害事情の存否を判断できる。
【0076】
この場合も、距離Yの設定に、道路地点における通行区分、法規制等を参考にして、前記距離Yを設定してもよい。この場合、例えば、走行レーンの変更が行えない区間の場合は、当然にその分だけ、距離が長くすることとできる。
【0077】
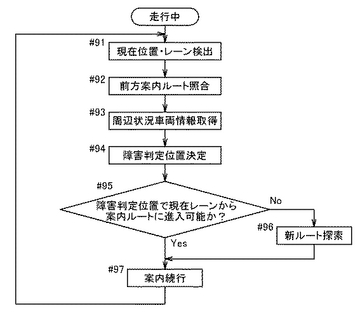
さらに、具体的に図9に示す処理フローに基づいて説明すると、自車の現在位置・レーンの検出(ステップ91)、前方案内ルートとの照合(ステップ92)はこれまでと同じである。この段階で、自車が走行している現在位置・走行レーンは決定され、目標とすべき走行レーンと現在走行している走行レーンの関係が判明する。
【0078】
引き続いて、周囲走行体情報、自車走行情報を取り込む(ステップ93)。このようにして取り込まれた情報を重みづけとして、予め標準的に決定されている距離との関係で、上記交差点からの距離Yである障害判定位置Eを決定する。例えば、周囲走行体が多い場合は、距離Yが長くなるように重み付けを実行し、少ない場合は距離Yが短くなるように重み付けを実行する(ステップ94)。そして、そのようにして決定された障害判定位置Eで現在の走行レーンから案内ルートRoへの侵入が可能か否かを判定する(ステップ95)。実質的には、この位置で左折可能なレーンにいるか否かが判定の基準となる。
【0079】
結果、進入可能な場合(ステップ95:yes)、そのまま案内を続行し(ステップ97)、進入不可な場合(ステップ95:no)、新ルートRnの探索を行った後(ステップ96)、その新ルートで案内を続行する(ステップ97)。
【0080】
以上のようにして、オフルートに陥った場合にも、案内ルートを使用したナビゲーションの空白期間を最小に抑えることができる。
【0081】
〔別実施の形態〕
(1) 上記の実施の形態にあっては、自車位置の決定においては、自車の走行レーンまでを含めて自車位置の決定が可能な例を示してたが、本願は、進路変更地点に近接する状況で、その案内レーンに沿った走行が可能な否かの判断を障害事情判定として行い、その結果に従って、新たな案内ルート探索を行えばよく、自車位置の決定は走行レーン基準で行うのみならず、従来どおり走行レーン探索を含まない道路単位で行ってもよい。
この場合、障害事情判定は、走行速度、自車位置から進路変更地点までの距離に従ってその判定を行える。
(2) 上記の実施の形態にあっては、案内ルートの探索を、道路単位で行う例を示したが、案内ルートの探索を走行レーンを含めた走行レーン単位で行ってもよい。この場合、オフルート判定が有効に働くこととなるが、走行レーンの変更を必要とする地点をこれまで説明してきた進路変更地点として、障害事情判定を行うこととなる。
さらに、案内ルートの道なり走行(所謂、直進走行)を除く走行を行う必要がある走行地点単位(これまで説明してきた進路変更地点単位)で探索を行うものとしてもよい。
【産業上の利用可能性】
【0082】
オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能なナビゲーション装置を得るとともに、この種のナビゲーションを実現できるナビゲーション方法を得ることにある。
【図面の簡単な説明】
【0083】
【図1】本発明の第一の実施形態に係るナビゲーション装置のハードウェア構成の概略を示すブロック図
【図2】第一の実施形態における新たな案内ルートの探索状況を示す図
【図3】地図データから得られる参考データの状態(イ)と走行レーンの決定を実行する場合に得られる撮像画像(ロ)とを示す図
【図4】地図データベースが有する各リンクのリンク情報の内容を示す図
【図5】交通情報データベースの内容を示す図
【図6】案内ルートの探索に使用されるリンク及びノードの関係を示す図
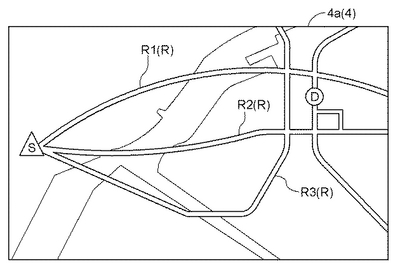
【図7】案内ルートRの表示例を示す図
【図8】第一の実施形態に係る障害事情判定を伴った新たな案内ルート探索のフローを示す図
【図9】第二の実施形態に係る障害事情判定を伴った新たな案内ルート探索のフローを示す図
【図10】オフルート後のリルートを行うフローを示す図
【図11】第二の実施形態における新たな案内ルートの探索状況を示す図
【図12】オフルート対策のみを実行する場合の問題点を示す図
【符号の説明】
【0084】
1 現在位置検知装置
2 情報記憶装置
2a 地図データベース
2b 交通情報データベース
3 演算処理装置
3a 画像処理手段
3b 自車レーン位置決定手段
3c 自車位置決定手段
3d オフルート判定手段
3e オフルート対策手段
3f 障害事情判定手段
3g 障害事情判定位置手段
3h オフルート予備対策手段
3i 案内ルート探索手段
4 表示入力装置
5 リモコン装置
6 車載カメラ
7 VICS受信機
9 工事予告看板
【技術分野】
【0001】
本発明は、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置に関する。
【背景技術】
【0002】
この種のナビゲーション装置は運転席の横等に搭載され、出発地から目的地までの案内ルートを例えば液晶ディスプレイ装置に表示して、運転者に目的地までの適切なルート(案内ルート)を提供することで、運転支援を行う。
【0003】
今日、この種の案内ルートの探索は、交通情報センターに集められた渋滞や道路規制、工事、交通事故等の情報と、主要幹線道路上に数百mから数kmの距離で設定された“リンク”を通過するのに必要な時間情報とを組み合わせて行われる。
【0004】
この種の案内ルートが求められたナビゲーション状態において、所謂、オフルート判定を実行するものが提案されている。
この構成のナビゲーション装置には、自車位置が案内ルートから外れているか否かを判定するオフルート判定手段が備えられ、このオフルート判定手段により自車位置が案内ルートから外れていると判定された場合には、その判定時点(その判定時に自車がいる位置)から、案内ルート探索手段を働かせて目的地までの新たな案内ルートを探索する。
従って、使用者は、オフルート状態に陥った状態で、ナビゲーション装置から新たに探索して求められた案内ルートの提供を受け、的確に目的地に到達することができる。
【0005】
この形態のオフルート対策の問題点を図12(イ)(ロ)に基づいて説明する。
図12は、この種のオフルートが発生する状況を示しており、車は一方向について複数レーンがある道路上を走行するものとする。図12において、道路が共に一方通行道路であるとともに、図上左右方向に走る左右走行路が4車線の左右行走行路raを示しており、図上上下方向に走る上下走行路が3車線の上下走行路を示している。さらに、前記上下方向路としては、図上左側にある左上下走行路rblと、右側にある右上下走行路rbrとが存在するものとする。
【0006】
上記構成の道路網に対して、案内ルート探索手段により探索・提案される案内ルートRoは、図上左下の出発地点S側から右上下走行路rbrの先にある目的地D側に設定されるものとする。
このような道路網において、自車は逐次、ナビゲーション装置からナビゲーションを受けることになるのであるが、この構成の道路網において、左上下走行路rblに図上左下地点から進入しようとする場合、左上下走行路rblから右上下走行路rbrとの間にある左右走行路部位(この部位を中間路部位rmと呼ぶ)においては、右上下走行路rbrに進入するために、できるだけ上側にある走行レーンを採る必要がある。
【0007】
しかしながら、図2(ロ)に示すように、この中間路部位において何らかの事情により、最も下側の走行レーンにしか進入できない場合が発生する。この種の問題は、例えば、中間路部位rmが渋滞状態にあり、自車が適切なレーン選択をできない場合、あるいは、使用者がレーン選択を意識せず、単に最も下側のレーンに進入してしまった場合である。
この状況にあっても、ナビゲーション装置にあっては、前記中間路部位rmにおいては、車は一応中間路部位rmに進入しているため、オフルートと判定することはない。
【0008】
さて、中間路部位rmにおいてレーン選択を誤り、車が左右走行路raを直進せざる得ない場合は車は直進し、実際にオフルートしてしまう。
この状況はナビゲーション装置により認識され、この段階で(図12(イ)において地点Cに到達した状態で)、初めてオフルート対策手段が働き、図12(ロ)に示すように現在位置を出発地とし、目的地までのルート探索を行う。結果、新たに求められた案内ルートによるナビゲーションに、地点C−B間のタイムラグで示す空白期間を生じ、好ましくない。
【0009】
このような空白期間の発生を抑制する技術として、案内ルートからの逸脱を想定して、その逸脱後の案内ルートを予め求めておこうとする技術が提示されている(特許文献1)。
さらに、この特許文献1における計算量の低減を目的として、案内交通点に関してのみ予備ルートを求めておこうとする技術がある(特許文献2)。
【特許文献1】特開平8−30193号公報(特許請求の範囲)
【特許文献2】特開2003−344077号公報(特許請求の範囲)
【発明の開示】
【発明が解決しようとする課題】
【0010】
上記のように、案内ルートからの逸脱を予測して、予め予備的なルートを準備しておく技術においては、逸脱の可能性が実効的且つ具体的に判断されないため、比較的多くの予備的な案内ルートを用意しておく必要があり、計算量が多くなるとともに、記憶しておく計算結果のデータ量も多くなるという問題がある。
【0011】
上記のような状態に鑑みて、本発明の目的は、オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能で、且つ、予備的な案内ルートを予め求めておく構成においても、その準備を効率的に行うことが可能なナビゲーション装置を得るとともに、この種のナビゲーションを実現できるナビゲーション方法を得ることにある。
【課題を解決するための手段】
【0012】
上記目的を達成するための、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置の特徴構成は、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段を備え、前記障害事情判定手段により前記障害事情が存在すると判定された場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策手段を備えたことにある。
【0013】
このナビゲーション装置には、障害事情判定手段を備え、この手段により、自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無が判定される。そして、障害事情が存在すると判定された場合は、オフルート予備対策手段が働き、現在の自車状況において案内ルートを外れて到達すると予想される地点を出発地として案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索する。
【0014】
この場合の探索手法は従来型のオフルート対策手段によるものと同様である。但し、その出発地の設定が、現在の自車状況において、案内ルートを外れ、障害事情の下に到達しうる地点となるのみである。
【0015】
そして、この構成にあっては、障害事情判定手段による判定をおこない、その判定結果として、自車が案内ルートを外れる可能性がある場合に、その外れる走行ルートに基づいた新たな案内ルートの探索を、障害事情判定手段による判定が行われる時点で実行する。
【0016】
結果、従来型のオフルートが発生した状態で、新たなルート探索を実行する場合に比較して、自車がオフルートする可能性がある段階で、新たなルート探索を行うこととなり、結果的に先に説明したナビゲーションの空白域を低減することができる。
【0017】
さらに、案内ルートを逸脱した場合に採用すべき予備的な案内ルートを進路変更地点毎に求めるのではなく、現状の走行状態等を考慮して、実際に障害事情が存在すると判定した場合に、新たな案内ルートを探索するため、実効的且つ具体的な状況に対応して、必要最小限の新たな案内ルート探索をおこなうだけの構成とできる。
【0018】
さて、この構成の場合、自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置におけるナビゲーション方法は、以下の特徴手段を備えることとなる。
即ち、自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定し、
前記障害事情が存在すると判定した場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策を実行し、
新たに探索された案内ルートに従ってナビゲーションを行うのである。
【0019】
さて、上記構成のナビゲーション装置において、
前記自車位置決定手段が、自車が走行している自車のレーン位置を求める自車レーン位置決定手段を備え、
前記障害事情判定手段が、前記自車レーン位置決定手段により決定される前記自車のレーン位置に基づいて、前記障害事情の存在を判定することが好ましい。
現今のナビゲーション装置にあっては、自車位置を走行路における走行レーン単位で検出することが可能となりつつある。例えば、自車位置の概略をGPS等の装置から決定するとともに、自車に備えられている車載カメラから路上にある白線、路肩位置等を決定し、予め求められている自車位置の地図情報から、その地点におけるレーン数、白線数、路肩の特徴等を割り出し、車載カメラから得られる撮像情報及び地図情報から得られる走行レーン数に関する情報に基づいて、自車が現在走行している走行レーンを決定することができる。
【0020】
一方、先に本願が解決しようとする課題の項で説明したように、自車が現在走行している走行レーンは、走行ルートの選択に関しては重要な要素である。
例えば、案内ルートとしては、走行前進側に右折もしくは左折の必要な地点が存在するにも係らず、左折もしくは右折が可能な走行レーンを自車が走行していない場合等にあっては、将来的に案内レーンに沿った走行が困難であると判断する必要が生じる。
そこで、自車レーン位置決定手段を備えるとともに、その決定結果に基づいて、前記障害事情判定手段が案内ルートに沿った走行の可否を判定することが有効であり、本願に係る、新たな案内ルート探索を有効に予備的且つ実効的に行うことができる。
【0021】
この装置の場合、自車が走行している自車のレーン位置を求め、
前記障害事情判定を行うに、前記自車のレーン位置に基づいて、前記障害事情の存在を判定するナビゲーション装置におけるナビゲーション方法を実行することとなる。
【0022】
さて、前記障害事情判定手段による判定において、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記判定を行うことが好ましい。
【0023】
自車が走行している走行地点にあっては、自車の走行レーンによっては、通行区分、法規制によって、案内ルートに沿った走行である左折、右折が出来なかったりすることがある。さらに、近接しつつある進路案内地点までの距離が短いにも関らず走行レーンを走行していない場合は、同様に案内ルートに沿った走行である左折、右折が出来なかったりすることがある。さらに、自車の周りに多くの車が存在している場合は、レーン変更自体が行い難くなる。また、自車の走行速度が大きい場合は、同様に、進路案内地点である案内ルートに沿った走行である左折、右折が出来なかったりする。
【0024】
そこで、これらの各要件のうちのいずれかを考慮して、障害事情判定手段が判定を行う。このようにすることで、現在の自車状況に的確に対応したナビゲーションを行うことができる。
【0025】
これまで説明してきたナビゲーション装置において、前記障害事情判定手段による障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段を備えることが好ましい。
【0026】
本願にあっては、自車が案内ルートに沿って走行できるか否かを判定するため、その判定を必要とする案内ルート上の地点と、必ずしも必要でない地点も存在する。例えば、判定の進路変更地点である交差点に近づく走行状態において、その交差点において案内ルートが左折又は右折している場合、その交差点から所定の距離にある位置で、障害事情判定は必然的に必要となる。一方、道なりの走行では、必ずしも障害事情判定を必要とするものではない。従って、障害事情判定位置決定手段を設け、例えば、特定の交差点から所定の距離にある区間又は地点を障害事情判定位置とすることにより、的確に案内ルートとの関係で決る障害事情判定位置を設定することができ、不要な判定処理を低減することができる。
【0027】
前記障害事情判定位置決定手段が、前記自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点との関係に基づいて、前記障害事情判定を行う前記障害事情判定位置を決定する構成で、
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離が可変とされていることが好ましい。
このように、前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離を可変とするには、自車が走行している道路地点における車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記距離を可変決定することができる。
【0028】
先に示したように、例えば、近接しつつある進路変更地点である交差点において左折をする必要がある場合に、上記のように、自車が走行している地点における車線情報、通行区分、法規制、自車の周りを走行する走行体に関する情報である周囲走行体、あるいは自車の走行状態によって、案内ルートに沿った走行が可能か否かが判明する。そこで、障害事情判定位置を、この種の状況に従って変えるのである。
例えば、左折レーンまでのレーン数が多い場合、通行区分、法規制によって左折できない場合、渋滞しており左折できない場合、走行速度が高く左折、レーン選択に所定以上の走行距離を要する場合等にあっては、障害事情判定位置から案内ルートに存する進路変更地点までの距離を伸ばしておく。この様にすることで、新たな案内ルートの探索を早期に行い、オフルート状態に陥った場合にも、空白期間を低減した状態で、ナビゲーションを行える。
【0029】
これまで説明してきたナビゲーション装置において、自車位置が案内ルートから外れているか否かを判定するオフルート判定手段を備え、
オフルート判定手段により自車位置が前記案内ルートから外れる可能性が高いと判定された場合に、前記案内ルート探索手段を働かせて前記目的地までの新たな案内ルートを探索するオフルート対策手段を備えることが好ましい。
【0030】
オフルート判定手段及びオフルート対策手段は、自車が実際に案内ルートからオフルートした状態において、新たな案内ルートを現在位置から求める手段であり、これら手段を設けることで、従来型のオフルート対策を講じることができる。
【0031】
さて、案内ルート探索は、前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行するものとできる。即ち、案内ルートの探索は、本願にあっては、どのような形態で行われてもよい。ここで、走行レーン単位で案内ルートを提供できる場合は、従来より確度の高い案内を行うことができる。
【発明を実施するための最良の形態】
【0032】
第一実施の形態
以下に、本発明の第一実施の形態について図面に基づいて説明する。
図1は、本実施形態に係るナビゲーション装置100のハードウェア構成の概略を示すブロック図である。
【0033】
図1に示すように、本実施形態に係るナビゲーション装置100は、主たる構成として、現在位置検知装置1、情報記憶装置2、演算処理装置3、表示入力装置4、リモコン入力装置5、車載カメラ6及びVICS受信機7を備えている。
【0034】
現在位置検知装置1は、ここでは、GPS受信機1a、方位検知センサ1b、及び距離検知センサ1cを備えて構成されている。
GPS受信機1aは、人工衛星からの信号を受信する装置であり、信号の発信時刻(現時刻)、GPS受信機1aの位置情報、GPS受信機1aの移動速度、GPS受信機1aの進行方向など様々な情報を得ることができる。
方位検知センサ1bは、地磁気センサやジャイロセンサ、或いは、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り付ける角度センサ等により構成され、車両の進行方向を検知することができる。
距離検知センサ1cは、車輪の回転数を検知するセンサや車両の加速度を検知するセンサと検知された加速度を2回積分する回路との組み合わせ等により構成され、車両の移動距離を検知することができる。
【0035】
VICS(Vehicle Information and Communication System:登録商標)受信機7は、道路上の所定の地点に設置された信号発信機から発信された信号を受信する装置であり、VICSの光ビーコン及び電波ビーコンや、FM放送に多重されたVICS信号を受信することができる装置としている。演算処理装置3は、このVICS受信機7が受信した信号から、渋滞情報、現在位置情報、駐車場情報等の各種交通情報を取得することができる。
【0036】
情報記憶装置2は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有して構成される。そして、ここでは、情報記憶装置2には、地図データベース2aと、交通情報データベース2b等が格納されている。
【0037】
地図データベース2aは、表示入力装置4の後述する表示部4aに表示するための地図情報を記憶しているデータベースであるとともに、自車レーン位置を決定するための情報を記憶したデータベースである。
地図情報は、道路レイヤ、施設等の背景情報を有する背景レイヤ、市町村名など文字を表示するための文字レイヤ等を有して構成されている。このうち、道路レイヤは、緯度及び経度で表現された地図上の位置情報を有する多数のノードNと、2つのノードNを連結して道路を構成する多数のリンクLとを有して構成されている。各リンクLは、そのリンク情報Laとして、図4に示すように、リンク番号、両端のノードNのノード番号、道路の種別(高速道路、有料道路、国道、県道等の種別)、リンク長さ及び幅員等の道路属性情報を備えている。
さらに、この地図データベース2aには、演算処理装置3に備えられる自車レーン位置決定手段3bにおいて使用するための、各道路における道路中心線G4dから道路幅方向における白線G2d、破線G3d、路端G1dの位置等が記憶されている(図3(イ)参照)。これらの情報は、車載カメラ6から取り込まれる画像と比較対照され、自車のレーン位置の決定に供される。
【0038】
また、この地図データベース2aには、演算処理装置3に備えられる障害事情判定手段3fにおいて使用するために、各道路に関して各地点の車線情報、通行区分情報、法規制情報が記憶されている。これらの情報は、自車の現在位置、案内ルートにおける最初の進路変更地点との関係で呼び出されて障害事情判定の用に供される。
【0039】
交通情報データベース2bは、本実施形態においては、図5に示すように、日付(ここでは月日、1月1日〜12月31日)及び時刻毎(ここでは15分単位、00:00〜23:45)に、地図データベース2aに含まれる全リンクL(リンク番号1〜nnn)のそれぞれに対応する渋滞度及び旅行時間の情報を記憶しているデータベースである。ここで、渋滞度は、「1」〜「5」の5段階で表されており、「1」は渋滞なし、「2」はやや混雑、「3」は混雑、「4」はやや渋滞、「5」は渋滞というように、数が増えるほど渋滞度も高くなるように表現される。なお、渋滞度を「1」〜「5」の5段階に分類したのは単に一例であり、更に細分化し又は簡略化することも当然に可能である。
旅行時間は、各リンクLの一方のノードNから他方のノードNまでの距離を通過するのに要する時間であり、図5中では秒単位の数値で表されている。なお、この交通情報データベース2bに記憶される情報は、過去のVICS情報や道路交通センサスの情報、或いは自車又は他車の走行履歴情報等から得られる情報に基づいて、日付及び時刻を同じくする過去の各リンクLにおける旅行時間や混雑の程度等を統計的に処理することで得ることができる。
【0040】
図1に戻り、表示入力装置4は、地図や案内ルートR等のルート案内のための各種情報、さらには、現時点あるいは案内ルートRの近くで行われる工事に関する情報、車載カメラ6により撮像される撮像情報を表示するための表示部4aと、被案内者である車両の運転者からの入力を受け付ける入力部4bとを有して構成されている。表示部4aには、例えば、液晶表示装置、プラズマ表示装置、CRT(cathode-ray tube)表示装置等を用いることができる。また、入力部4bとしては、ここでは、表示部4aの表示画面上に設けたタッチパネルと、表示画面の周囲に配置した各種スイッチとを備えている。
【0041】
また、リモコン入力装置5は、車両の運転者からの入力を受け付けてリモートコントロールにより演算処理装置3側に送信する装置であり、送信された入力情報はリモコン受信機8を介して演算処理装置3に入力される。
【0042】
車載カメラ6は、自車の前方の情景を撮像できるように構成されており、この車載カメラ6からの撮像画像が後述する画像処理手段3aに送られて画像処理の対象となる。本願にあっては、後述するように自車レーン位置決定手段3bによる自車レーン位置の決定を行うため、この画像処理により得られた情報が利用される。
【0043】
演算処理装置3は、例えば、各種の演算処理及びナビゲーション装置の各部の動作制御を行うCPUと、このCPUが演算処理を行う際のワーキングメモリとして使用されるRAMと、CPUを動作させるための各種の動作プログラムや制御プログラム等のソフトウェアが格納されたROM等を備える構成とすることができる。そして、この演算処理装置3に、現在位置検知装置1、情報記憶装置2、表示入力装置4、リモコン入力装置5、車載カメラ6及びリモコン受信器8が接続されている。
【0044】
演算処理装置3は所定の目的を達成するためのソフトウェアが格納されており、ハードウェアとともに働いて一定の目的を達成するように構成されている。即ち、ソフトウェアとハードウェアとは、共働することで所定の目的を実現する処理手段を構成する。ここでは、図1に示すように、演算処理装置3は、画像処理手段3a、自車レーン位置決定手段3bを含む自車位置決定手段3c、オフルート判定手段3d、オフルート対策手段3e、障害事情判定手段3f、障害事情判定位置決定手段3g、オフルート予備対策手段3h、案内ルート探索手段3iを備えている。
【0045】
演算処理装置3は、所定の動作プログラム、データ、入力情報等に基づいて、主に3種の目的を達成するように構築されている。
その一は、自車位置の決定にあり、上記した現在位置検知装置1からの情報及び車載カメラ6からの情報に従って、自車レーン位置まで自車位置を決定する構成が採用されている。この目的から、図1に示す画像処理手段3a、自車レーン位置決定手段3bを備えた自車位置決定手段3cが備えられている。
その二は、オフルート時の新たな案内ルートの探索にあり、この目的からオフルート判定手段3d、オフルート対策手段3eが備えられている。
その三は、オフルートとなる前に新たな案内ルートを探索しておくことにあり、この目的から、障害事情判定手段3f、障害事情判定位置決定手段3g及びオフルート予備対策手段3hが備えられている。
【0046】
以下、夫々の手段に関して順に説明する。
1.自車位置の決定
この決定には、上述の現在位置検知装置1、情報記憶装置2及び車載カメラ6からの情報が利用される。
上記現在位置検知装置1からの情報は、自車の概略位置を5〜10m程度の範囲内で決定することができる。このようにして求められる自車の概略位置情報は、自車レーン位置決定手段3bにおける自車レーン位置の決定に使用される。
【0047】
即ち、上記地図データベース2aに記憶されている道路関連の情報から、自車の概略位置に存するレーン決定に有用となる情報が導出される。この種の情報としては、自車の概略位置におけるレーン数、白線、破線の数、さらに路肩の状態等である。
この種の情報に基づいて、自車の概略位置における路端G1d、白線G2d、破線G3d、中央白線G4dを撮像される状態で示したのが図3(イ)である。
一方、車載カメラ6からの撮像情報は画像処理手段3aに送られ、その撮像情報から自車の概略位置における道なりの特徴画像(路端G1i,白線G2i、破線G3iさらには中央白線G4i)が抽出される。図3(ロ)にこの種の例を示した。この例は、自車が片側2車線の左側走行レーンを走行している例である。
【0048】
そして、上記自車レーン位置決定手段3bにあっては、地図データベース2aからの情報(図3(イ)に相当する情報)と,画像処理手段3aにより得られた情報(図3(ロ)に相当する情報)とが道路幅方向の位置関係で比較対照され、自車レーンが決定される。この比較対照にあたっては、地図情報データベース2a側から導出される、自車が左側走行レーンにあり、自車に装備された車載カメラ6が撮像すべき画像と、自車が左側走行レーンにあり、自車に装備された車載カメラ6が撮像した実際の撮像画像との対照で、その一致度の高い側を自車の現在走行している走行レーンとする。このようにして、自車レーン位置まで決定することができる。
【0049】
2 案内ルート探索
この案内ルート探索は案内ルート探索手段3iにより実行される。
案内ルート探索手段3iは、基本的には、使用者により目的地Dが指定された際に、出発地Sから目的地Dまでの案内ルートRを探索して決定する処理を行う。ここで、出発地Sは、現在位置検知装置1により検知された自車の現在位置に基づいて定まるが、使用者が表示入力装置4の入力部4b又はリモコン入力装置5により入力して指定することもできる。
【0050】
さらに、本願にあっては、案内ルート探索手段3iは、オフルート対策手段3e及びオフルート予備対策手段3hにより新たなルート探索時にも使用される。従って、オフルート対策手段3eによる新たな案内ルートの探索時おいては、その出発地Sはオフルートしていると判定された自車の現在位置となり、オフルート予備対策手段3hによる新たな案内ルートの探索時においては、障害事情判定手段3fにより自車が現在の案内ルートから外れると判定された場合に、これまで採用してきた案内ルートを外れ、この障害事情下で到達すると予想される位置となる。この位置は、図2(ロ)、図11(ロ)で示す例では、進路変更地点である図上Cで示す位置より、僅かに右側(直進側)の位置となる。
【0051】
案内ルート探索手段3iにより案内ルートRを探索して決定する処理は、公知の各種の方法により行うことができ、例えば、以下の方法により行うことができる。
【0052】
この方法は、案内ルートRを構成する各リンクLにおける旅行時間を基本とするものである。例えば、図6に示すように、出発地Sと目的地Dが決定されると、両地点を結ぶ複数のルート候補R1、R2、R3を挙げることができる。そして、各ルート候補R1、R2、R3は、そのルート候補を構成する連続したリンクL1、L2、・・の集合として認識される。これらの各リンクLについては、日付及び時刻毎に各リンクLを通過するに要する旅行時間の情報が交通情報データベース2bに記憶されている。
【0053】
すなわち、先に説明した図5に示す交通情報データベース2bによれば、いずれかの日付(例えば1月1日)及び時刻(例えば00:00)について、リンク番号で識別される各リンクL1、L2、・・・Lnnn全てに対して、その渋滞度(1〜5)及び旅行時間(例えば20秒、135秒、42秒等)が確定される。従って、全てのルート候補R1、R2、R3に対して、そのルート全体を通過するために必要となる予想所要時間を算定することが可能であり、例えば、この所要時間をルート通過に要するコストと見なして、そのコストが最低となるルート候補を案内ルートRとして決定するのである。
【0054】
なお、以上の説明では、説明を簡単にするために、コストを決定する要素として旅行時間のみに関して説明したが、従来から知られているように、各リンクLのリンク情報Laに含まれる道路の種別(高速道路、有料道路、国道、県道等の種別)や幅員、リンクL間を繋ぐノードNが交差点である場合に交差点を通過するための時間、更には、出発地からのリンクLあるいはノードNまでの距離、右左折、道路の車線数等をコスト計算に含めることも可能である。
【0055】
3 オフルート対策
オフルートに対応するために、オフルート判定手段3dとオフルート対策手段3eとの両者の手段が備えられている。この対策手段3eは、従来からナビゲーション装置100に備えられているものと同様であり、自車が案内ルートを外れて、誤った道に進入した場合に、その位置から新たな案内ルートを探索する。これら手段による処理は、図12における案内ルートRoと新たな案内ルートRnとの関係と同様である。
【0056】
従って、オフルート判定手段3dは、基本的には現在位置検知装置1から検出される自車の概略位置と案内ルートRoを道路単位で比較して、自車が案内ルートRo上にあるか否かを判断する。そして、オフルート判定手段3dにより自車位置が案内ルートRoから外れていると判定された場合に、前記オフルート対策手段3dは、自車の現在位置を出発地Sとして、これまでに設定されている目的地Dを目的地Dとして、案内ルート探索手段3iを働かせてその目的地までの新たな案内ルートRnを探索する。よって、現実にオフルートが発生した場合に、その位置から的確な案内ルートでナビゲーションを行える。
【0057】
このオフルート対策の処理フローを図10に示した。同図に示すように、現在位置・レーンの検出を実行し(ステップ101)、その結果を現在の案内ルートRoと照合する(ステップ102)。照合の結果合致する場合(ステップ103:yes)はそのまま案内を続行し(ステップ105)、合致しない場合(ステップ103:no)は、新たな案内ルートRnの探索を経て(ステップ104)、その案内ルートRnによる案内を続行する(ステップ105)。
【0058】
4 オフルート予備対策
このオフルート予備対策は、自車がオフルートに陥る可能性が高いか否かに従って、陥る可能性が高い場合は、オフルートに陥った場合の新たな案内ルートRnを予め求めておくものである。従って、この目的から、障害事情判定手段3f、障害事情判定位置決定手段3g及びオフルート予備対策手段3hが備えられている。
ここで、障害事情判定手段3fは、自車位置より走行前進側にある案内ルートRoに関し、現在の自車状況から見て、当該案内ルートRoに沿った走行を困難とする障害事情の有無を判定するものであり、この障害事情判定手段3fにより障害事情が存在すると判定された場合に、オフルート予備対策手段3hは、これまでの案内ルートRoを外れ、その障害事情下で到達可能な地点(例えば、図2(イ)において進路変更地点Cより僅かに直進した地点)を出発地Sとして、案内ルート探索手段3iを働かせて、その出発地Sから予め設定されている目的地Dまでの新たな案内ルートを探索する。
従って、何らかの事情により障害事情判定手段3fが、現在の案内ルートRoに沿った走行が不可能と判断した場合に、そのルートから外れる地点から目的地Dまでの新たな案内ルートの探索が実行される。
【0059】
さて、障害事情判定手段3fは、少なくとも、先に説明した自車レーン位置決定手段3bにより決定される自車のレーン位置に基づいて、案内ルートに沿った走行が可能か否かの判定を行う。
例えば、案内ルートに沿った走行において、進路変更地点(交差点等)で左折が必要な場合は、左折レーンにいる場合は障害事情無し、さらに直進レーンにいる場合や右折レーンにいる場合は障害事情がある可能性があると判定し、左折レーンから遠い程、障害事情の程度が高いと判定する。
【0060】
さらに、この判断にあっては、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある案内ルートRにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上も、その判定の要件とされる。
【0061】
通行区分、法規制の例としては、その走行地点における走行レーン変更禁止等が参考にされ、現在自車が走行している走行レーンからみて、案内ルートRo上で近づきつつある最近の左折交差点があるにもかかわらず、自車が直進レーンにいる場合に、障害事情がある可能性が高いと判断する。この場合、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0062】
自車位置より走行前進側にある前記案内ルートRoにおける最初の進路変更地点Cまでの距離情報の例としては、現在自車が走行している走行レーンからみて、案内ルートRo上で近づきつつある最近の左折交差点Cがあるにもかかわらず、自車が直進レーンにおり、さらにその交差点Cまでの距離が不足である場合に、障害事情があると判断する。この場合、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0063】
自車の周りを走行する走行体に関する情報である周囲走行体情報の例としては、現在自車の周りに多くの車が存在しさらに自車が中央側のレーンを走行している場合で、案内ルートRo上で近づきつつある最近の左折交差点Cがある場合に、障害事情があると判断する。この場合も、オフルート予備対策手段3hは、自車が接近しつつある交差点Cを直進することを要件として、新たな案内ルートRnを探索することとなる。
【0064】
自車の走行情報の例としては、自車が中央側のレーンを比較的高速で走行している場合で、案内ルートRo上で近づきつつある最近の左折交差点Cがある場合に、障害事情があると判断する。この場合も、オフルート予備対策手段3hは、自車が接近しつつある交差点を直進することを要件として、新たな案内ルートRnを探索することとなる。
【0065】
以上の説明においては、本願にいう障害事情判定の概念に従い任意の走行地点で障害事情判定を行う例に関して説明したが、本実施形態の場合、その判定を行う区間が決定されている。
【0066】
即ち、図1に示すように、前記障害事情判定手段3fによる障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段3gが備えられており、この障害事情判定位置決定手段3gが、自車位置より走行前進側にある前記案内ルートRoにおける最初の進路変更地点Cとの関係に基づいて、この例では前記障害事情判定区間を決定するものとされている。
従って、常時、障害事情判定手段3fによる判定が実行されることはなく、例えば、左折交差点Cから所定の距離Xにある区間内でのみ障害事情判定が実行されるように構成されている。図2(ロ)に、この区間Aを示した。
【0067】
以下に、この例に係るオフルート予備対策の処理フローを図8に示した。
この処理フローは、自車が上記区間A内を走行中に逐次、繰り返し実行され、必要な場合は、新たな案内ルートRnの探索を行うものである。
【0068】
このフローにおいては、先ず、自車が走行している地図上の自車位置及び自車レーンが検出される(ステップ81)。一方、予め探索されている案内ルートRoに関して、自車の前方の進路変更地点Cについて、現状で自車が走行しているべき走行ルートとの照合が成される(ステップ82)。この照合段階で、自車が案内ルートRoに沿って走行しようとすれば、それに適合するルート上を走行しているかどうかの判定がつくこととなる。ここで、図2に示す例の場合、左折可能な最も上側の走行レーンを走行している場合は、案内ルートRoに沿っての走行が可能であり、最も下側の走行レーンを走行している場合は、オフルートの可能性が高いといえる。
【0069】
この状況で、案内ルートRoにおいて、前方所定距離Xm内に進路変更地点Cがあるか否かが判断される(ステップ83)。即ち、進路変更地点Cとの関係で障害事情判定を行う必要があるかどうかを判定するのである。図2(ロ)に示す例にあっては、区間Aで示した左右方向の距離がXに相当し、図示するような4車線の道路では200〜1000m程度に設定するのが好ましい。この判断は、自車が現状のまま走行しても案内ルートRoに沿った走行が可能かどうかの判定要件となる。従って、この判定において、自車位置が進路変更地点Cに近づき過ぎている場合はyesとなり、障害事情がある可能性が高いとの判断の下、ステップ84〜ステップ86の処理を実行する。
一方、自車と進路変更地点Cとの距離が所定以上ある場合は、現在の案内ルートRoに沿った走行が可能であると判定し、現状の案内状態を維持する(ステップ83:no)。
【0070】
ステップ83でyesと判断した場合は、自車の周辺情報、車両情報を所得する(ステップ84)。ここで、自車の周辺情報とは、先に説明したように、自車の周囲に他車が存在するか否かである。さらに、車両情報とは、自車の走行速度等である。この要件は、渋滞度が高く、走行速度が高い場合に、左折等が困難になるからである。
【0071】
以上の情報を得た上で現在の走行レーンを含む現在位置から案内ルートへの進入が可能な否かの判定を実行する(ステップ85)。例えば、自車の周りが他車で埋められており、比較的高速で走行している状態では、障害事情ありと判定し案内ルートへの進入不可と判定することとなる。一方、自車の周りに車が無く、比較的低速で走行している状態では、障害事情判定で障害事情なしと判定し、案内ルートへの進入可能と判定することとなる。この場合に、さらに現時点あるいは交差点までの通行区分、法規制等を参照して、障害事情の有無を判断してもよい。
【0072】
上記の判定を実行し、障害事情があり現状の案内ルートRoへの進入不可と判断された場合(ステップ85:no)は、新たな案内ルートRnの探索を実行する(ステップ86)。この新たな案内ルート探索は、障害事情がそのまま維持され、その事情に従った走行を行った状況において到達する地点を出発地S(図2においてC点より少し直進した位置)とするものとなる。
上記の判定を実行し、障害事情がなく、現状の案内ルートRoへの進入可と判断された場合(ステップ85:yes)は、現状の案内ルートRoに従ったナビゲーションを実行する(ステップ87)。
以上のようにして、予備的な案内ルートの探索を、実際にオフルートする可能性が高い場合に行い、限られた資源を有効利用できる。
【0073】
第2実施の形態
上記の実施の形態にあっては、障害事情判定を行う範囲を、自車から走行前進側にある案内ルートRoにおける最初の進路変更地点Cとの関係から決定するものとし、その距離Xを一定のものとして、その位置より進路変更地点C側にある所定の区間A内で障害事情判定を逐次行うものとしたが、走行状態に従って、その進路変更地点からの距離を可変として、その位置のみで判定するものとしてもよい。
【0074】
この例では、図11(ロ)に示すように、案内ルートRoにおける最初の進路変更地点Cから障害事情判定位置Eまでの距離Y自体を、自車が走行している道路地点における、車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて決定する。
【0075】
この例を、自車が案内ルートRo上にある左折交差点Cに接近している場合について、説明する(図11(ロ)参照)。これまでにも説明したように、本願にあっては、自車が走行している走行レーンは、左折レーンか直進レーンかの決定は可能とされている。そこで、例えば、左折レーンまでのレーン数が多く、走行速度が速く、さらに渋滞度が高い場合に、上記距離Yを長く取り、その位置で左折レーンに自車がない場合は、障害事情が存在すると判断する。
逆に左折レーンまでのレーン数が少なく、走行速度が遅く、さらに渋滞度が低い場合は、上記距離を短くとり、その位置で左折レーンに自車がない場合は、障害事情が存在すると判断する。
このようにすると、左折交差点Cまでの距離と走行レーンとの関係で、障害事情の存否を判断できる。
【0076】
この場合も、距離Yの設定に、道路地点における通行区分、法規制等を参考にして、前記距離Yを設定してもよい。この場合、例えば、走行レーンの変更が行えない区間の場合は、当然にその分だけ、距離が長くすることとできる。
【0077】
さらに、具体的に図9に示す処理フローに基づいて説明すると、自車の現在位置・レーンの検出(ステップ91)、前方案内ルートとの照合(ステップ92)はこれまでと同じである。この段階で、自車が走行している現在位置・走行レーンは決定され、目標とすべき走行レーンと現在走行している走行レーンの関係が判明する。
【0078】
引き続いて、周囲走行体情報、自車走行情報を取り込む(ステップ93)。このようにして取り込まれた情報を重みづけとして、予め標準的に決定されている距離との関係で、上記交差点からの距離Yである障害判定位置Eを決定する。例えば、周囲走行体が多い場合は、距離Yが長くなるように重み付けを実行し、少ない場合は距離Yが短くなるように重み付けを実行する(ステップ94)。そして、そのようにして決定された障害判定位置Eで現在の走行レーンから案内ルートRoへの侵入が可能か否かを判定する(ステップ95)。実質的には、この位置で左折可能なレーンにいるか否かが判定の基準となる。
【0079】
結果、進入可能な場合(ステップ95:yes)、そのまま案内を続行し(ステップ97)、進入不可な場合(ステップ95:no)、新ルートRnの探索を行った後(ステップ96)、その新ルートで案内を続行する(ステップ97)。
【0080】
以上のようにして、オフルートに陥った場合にも、案内ルートを使用したナビゲーションの空白期間を最小に抑えることができる。
【0081】
〔別実施の形態〕
(1) 上記の実施の形態にあっては、自車位置の決定においては、自車の走行レーンまでを含めて自車位置の決定が可能な例を示してたが、本願は、進路変更地点に近接する状況で、その案内レーンに沿った走行が可能な否かの判断を障害事情判定として行い、その結果に従って、新たな案内ルート探索を行えばよく、自車位置の決定は走行レーン基準で行うのみならず、従来どおり走行レーン探索を含まない道路単位で行ってもよい。
この場合、障害事情判定は、走行速度、自車位置から進路変更地点までの距離に従ってその判定を行える。
(2) 上記の実施の形態にあっては、案内ルートの探索を、道路単位で行う例を示したが、案内ルートの探索を走行レーンを含めた走行レーン単位で行ってもよい。この場合、オフルート判定が有効に働くこととなるが、走行レーンの変更を必要とする地点をこれまで説明してきた進路変更地点として、障害事情判定を行うこととなる。
さらに、案内ルートの道なり走行(所謂、直進走行)を除く走行を行う必要がある走行地点単位(これまで説明してきた進路変更地点単位)で探索を行うものとしてもよい。
【産業上の利用可能性】
【0082】
オフルート状態に陥った状況にあっても、ナビゲーションの空白期間をできるだけ少ない時間とすることが可能なナビゲーション装置を得るとともに、この種のナビゲーションを実現できるナビゲーション方法を得ることにある。
【図面の簡単な説明】
【0083】
【図1】本発明の第一の実施形態に係るナビゲーション装置のハードウェア構成の概略を示すブロック図
【図2】第一の実施形態における新たな案内ルートの探索状況を示す図
【図3】地図データから得られる参考データの状態(イ)と走行レーンの決定を実行する場合に得られる撮像画像(ロ)とを示す図
【図4】地図データベースが有する各リンクのリンク情報の内容を示す図
【図5】交通情報データベースの内容を示す図
【図6】案内ルートの探索に使用されるリンク及びノードの関係を示す図
【図7】案内ルートRの表示例を示す図
【図8】第一の実施形態に係る障害事情判定を伴った新たな案内ルート探索のフローを示す図
【図9】第二の実施形態に係る障害事情判定を伴った新たな案内ルート探索のフローを示す図
【図10】オフルート後のリルートを行うフローを示す図
【図11】第二の実施形態における新たな案内ルートの探索状況を示す図
【図12】オフルート対策のみを実行する場合の問題点を示す図
【符号の説明】
【0084】
1 現在位置検知装置
2 情報記憶装置
2a 地図データベース
2b 交通情報データベース
3 演算処理装置
3a 画像処理手段
3b 自車レーン位置決定手段
3c 自車位置決定手段
3d オフルート判定手段
3e オフルート対策手段
3f 障害事情判定手段
3g 障害事情判定位置手段
3h オフルート予備対策手段
3i 案内ルート探索手段
4 表示入力装置
5 リモコン装置
6 車載カメラ
7 VICS受信機
9 工事予告看板
【特許請求の範囲】
【請求項1】
自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置であって、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段を備え、前記障害事情判定手段により前記障害事情が存在すると判定された場合に、前記障害事情の存在下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策手段を備えたナビゲーション装置。
【請求項2】
前記自車位置決定手段が、自車が走行している自車のレーン位置を求める自車レーン位置決定手段を備え、
前記障害事情判定手段が、前記自車レーン位置決定手段により決定される前記自車のレーン位置に基づいて、前記障害事情の存在を判定する請求項1記載のナビゲーション装置。
【請求項3】
前記障害事情判定手段による判定において、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記判定を行う請求項1又は2記載のナビゲーション装置。
【請求項4】
前記障害事情判定手段による障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段を備える請求項1〜3のいずれか1項記載のナビゲーション装置。
【請求項5】
前記障害事情判定位置決定手段が、前記自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点との関係に基づいて、前記障害事情判定を行う前記障害事情判定位置を決定する構成で、
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離が可変とされている請求項4記載のナビゲーション装置。
【請求項6】
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離を可変とするに、
自車が走行している道路地点における車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記距離を可変決定する請求項5記載のナビゲーション装置。
【請求項7】
前記自車位置が前記案内ルートから外れているか否かを判定するオフルート判定手段を備え、
前記オフルート判定手段により自車位置が前記案内ルートから外れていると判定された場合に、前記案内ルート探索手段を働かせて前記目的地までの新たな案内ルートを探索するオフルート対策手段を備えた請求項1〜6のいずれか1項記載のナビゲーション装置。
【請求項8】
前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行する請求項1〜7のいずれか1項記載のナビゲーション装置。
【請求項9】
自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置におけるナビゲーション方法であって、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定し、
前記障害事情が存在すると判定した場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策を実行し、
新たに探索された案内ルートに従ってナビゲーションを行うナビゲーション装置におけるナビゲーション方法。
【請求項10】
自車が走行している自車のレーン位置を求め、
前記障害事情判定を行うに、前記自車のレーン位置に基づいて、前記障害事情の存在を判定する請求項9記載のナビゲーション装置におけるナビゲーション方法。
【請求項11】
前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行する請求項9又は10項記載のナビゲーション装置におけるナビゲーション方法。
【請求項1】
自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置であって、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定する障害事情判定手段を備え、前記障害事情判定手段により前記障害事情が存在すると判定された場合に、前記障害事情の存在下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記案内ルート探索手段を働かせて、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策手段を備えたナビゲーション装置。
【請求項2】
前記自車位置決定手段が、自車が走行している自車のレーン位置を求める自車レーン位置決定手段を備え、
前記障害事情判定手段が、前記自車レーン位置決定手段により決定される前記自車のレーン位置に基づいて、前記障害事情の存在を判定する請求項1記載のナビゲーション装置。
【請求項3】
前記障害事情判定手段による判定において、自車が走行している道路地点における通行区分情報又は法規制情報、自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点までの距離情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記判定を行う請求項1又は2記載のナビゲーション装置。
【請求項4】
前記障害事情判定手段による障害事情判定を行う障害事情判定区間又は位置を決定する障害事情判定位置決定手段を備える請求項1〜3のいずれか1項記載のナビゲーション装置。
【請求項5】
前記障害事情判定位置決定手段が、前記自車位置より走行前進側にある前記案内ルートにおける最初の進路変更地点との関係に基づいて、前記障害事情判定を行う前記障害事情判定位置を決定する構成で、
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離が可変とされている請求項4記載のナビゲーション装置。
【請求項6】
前記案内ルートにおける最初の進路変更地点から前記障害事情判定位置までの距離を可変とするに、
自車が走行している道路地点における車線情報、通行区分情報又は法規制情報、自車の周りを走行する走行体に関する情報である周囲走行体情報あるいは自車の走行状態に関する自車走行情報の何れか一種以上に基づいて前記距離を可変決定する請求項5記載のナビゲーション装置。
【請求項7】
前記自車位置が前記案内ルートから外れているか否かを判定するオフルート判定手段を備え、
前記オフルート判定手段により自車位置が前記案内ルートから外れていると判定された場合に、前記案内ルート探索手段を働かせて前記目的地までの新たな案内ルートを探索するオフルート対策手段を備えた請求項1〜6のいずれか1項記載のナビゲーション装置。
【請求項8】
前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行する請求項1〜7のいずれか1項記載のナビゲーション装置。
【請求項9】
自車位置を求める自車位置決定手段と、目的地までの案内ルートを探索する案内ルート探索手段とを備えたナビゲーション装置におけるナビゲーション方法であって、
自車位置より走行前進側にある前記案内ルートに関し、現在の自車状況から見て、当該案内ルートに沿った走行を困難とする障害事情の有無を判定し、
前記障害事情が存在すると判定した場合に、前記障害事情下で当該案内ルートを外れて到達すると予想される地点を出発地として、前記出発地から前記目的地までの新たな案内ルートを探索するオフルート予備対策を実行し、
新たに探索された案内ルートに従ってナビゲーションを行うナビゲーション装置におけるナビゲーション方法。
【請求項10】
自車が走行している自車のレーン位置を求め、
前記障害事情判定を行うに、前記自車のレーン位置に基づいて、前記障害事情の存在を判定する請求項9記載のナビゲーション装置におけるナビゲーション方法。
【請求項11】
前記案内ルート探索手段が、道路単位、走行レーン単位、若しくは案内ルートに存する道なり走行を除く走行を行う必要がある走行地点単位でルート探索を実行する請求項9又は10項記載のナビゲーション装置におけるナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2006−184105(P2006−184105A)
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願番号】特願2004−377089(P2004−377089)
【出願日】平成16年12月27日(2004.12.27)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願日】平成16年12月27日(2004.12.27)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]