
ナビゲーション装置

【課題】現在位置を基点として進行方向に向かって周辺施設の検索を行うことによって、検索された周辺施設に向う際にはすでに通過した道路を戻ることがないようにする。
【解決手段】施設抽出処理ルーチンS107では、現在位置を基点として進行方向に向かって周辺施設の検索を行う。距離算出ルーチンS109,S114では、現在位置と検索された各周辺施設との間の経路距離を算出する。リスト作成ルーチンS110,S115では、周辺施設リストを作成する。施設位置表示ルーチンS111,S116では、周辺施設リストに含まれる周辺施設の位置を示すマークを、表示装置に表示された道路地図上に重ねて表示する。
【解決手段】施設抽出処理ルーチンS107では、現在位置を基点として進行方向に向かって周辺施設の検索を行う。距離算出ルーチンS109,S114では、現在位置と検索された各周辺施設との間の経路距離を算出する。リスト作成ルーチンS110,S115では、周辺施設リストを作成する。施設位置表示ルーチンS111,S116では、周辺施設リストに含まれる周辺施設の位置を示すマークを、表示装置に表示された道路地図上に重ねて表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置に関し、特に施設検索機能を有するナビゲーション装置に関する。
【背景技術】
【0002】
従来技術として、現在位置から複数の施設までの経路距離あるいは移動所要時間を算出し、これらの順序で施設のリスト表示および道路地図上への表示を行うものが知られている(例えば、特許文献1、特許文献2等参照)。
【0003】
特許文献1に開示された従来のナビゲーション装置は、道路地図上に施設を検索するための検索基点を設け、その基点を中心に、所定の検索施設数になるまで検索範囲を除々に拡大するものである。
【0004】
また、特許文献2に開示された従来のナビゲーション装置は、現在位置から最寄りの施設(以下、周辺施設という)までの経路距離(実移動距離)または現在位置から周辺施設までの移動所要時間を算出するとともに、各施設ジャンルを経路距離(実移動距離)順または移動所要時間順に並び替えた周辺施設リストを作成し、その周辺施設リストおよび周辺施設リスト中の周辺施設の位置を示すアイコンを上位のものから所定の数だけ表示するものである。
【特許文献1】特開平9−292262号公報
【特許文献2】特開2001−174273号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された従来のナビゲーション装置は、道路地図上に施設を検索するための検索基点を設け、その基点を中心に、所定の検索施設数になるまで検索範囲を除々に拡大するようにしていたので、施設の検索範囲を車両の進行方向に限定することができないという課題があった。このため、ユーザが求めていない車両の進行方向に対して戻る方向にある施設までもが検索されてしまい、不要な施設の検索に無駄な検索時間が費やされていたとともに、検索結果の施設からユーザ自身が進行方向に対して戻る方向にある施設を除外して施設を決定しなければならないという不具合があった。
【0006】
また、特許文献2に開示された従来のナビゲーション装置は、現在位置から周辺施設までの経路距離(実移動距離)または現在位置から周辺施設までの移動所要時間を算出するとともに、各周辺施設を経路距離(実移動距離)順または移動所要時間順に並び替えた周辺施設リストを作成し、その周辺施設リストおよび周辺施設リスト中の周辺施設の位置を示すアイコンを上位のものから所定の数だけ表示するようにしていたので、経路案内を行っている場合でも、案内経路とは無関係な検索範囲にある周辺施設が検索され、ユーザが求める案内経路に沿った方向にある周辺施設が検索されないことがあるという課題があった。
【0007】
本発明の課題は、上述のような事情を背景になされたものであって、周辺施設を検索する際に、現在位置を基点として進行方向に向かって周辺施設の検索を行うようにして、検索された周辺施設に向う際にはすでに通過した道路を戻ることがないようにしたナビゲーション装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0008】
請求項1記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を基点として前記進行方向に向かって前記地図データ記憶部から周辺施設の検索を行う施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項1記載のナビゲーション装置によれば、周辺施設の検索を現在位置を基点として進行方向に向かって行うようにしたので、進行方向に対して戻る方向にある周辺施設を検索対象からあらかじめ除外することができるという効果がある。すなわち、従来は、ユーザが求めていない進行方向から戻る方向にある周辺施設までも検索対象としていたので、不要な周辺施設の検索に無駄な検索時間が費やされていたとともに、検索結果の周辺施設からユーザ自身が進行方向に対して戻る方向にある周辺施設を除外して周辺施設を決定しなければならないという不具合があったが、本発明では、進行方向に対して戻る方向にある周辺施設が検索対象からあらかじめ除外されるので、上記不具合が解消される。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0009】
請求項2記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を基点として前記進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項2記載のナビゲーション装置によれば、周辺施設の検索範囲を現在位置を基点として進行方向に対して所定角度の検索範囲に限定したので、進行方向に対して戻る方向にある周辺施設を検索対象から確実に除外することができるという効果がある。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0010】
請求項3記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、経路を探索する経路探索手段と、前記経路探索手段により探索された経路を案内する経路案内手段と、前記経路案内手段により経路案内がされている場合に、前記現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを有することを特徴とする。請求項3記載のナビゲーション装置によれば、周辺施設の検索範囲を現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲に限定したので、道路地図上の案内経路に逆行する方向にある周辺施設を検索対象からあらかじめ除外することができるという効果がある。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0011】
請求項4記載のナビゲーション装置は、請求項2または請求項3記載のナビゲーション装置において、前記所定角度を可変に設定可能とする角度設定手段を備えることを特徴とする。請求項4記載のナビゲーション装置によれば、角度設定手段により所定角度を可変に設定できるので、ユーザの嗜好に合わせて検索範囲を変更することができるという効果がある。
【0012】
請求項5記載のナビゲーション装置は、請求項2ないし請求項4のいずれか1項に記載のナビゲーション装置において、前記所定角度の検索範囲を、前記現在位置を基点とする所定半径でさらに限定した扇形領域とすることを特徴とする。請求項5記載のナビゲーション装置によれば、現在位置を基点として所定角度の検索範囲をさらに所定半径によって限定できるようにしたので、現在位置を支点とした扇形領域を検索範囲とすることができ、周辺施設の検索範囲をユーザの求めに応じてより絞り込むことが可能になる。
【0013】
請求項6記載のナビゲーション装置は、請求項2ないし請求項5のいずれか1項に記載のナビゲーション装置において、前記所定半径を可変に設定可能とする半径設定手段を備える。請求項6記載のナビゲーション装置によれば、所定半径を可変に設定可能としたので、周辺施設の検索範囲をユーザの嗜好に合わせて変更することができる。
【0014】
請求項7記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を一辺の中心とし、かつ前記一辺に直交する他の辺を前記進行方向とした四角形内にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項7記載のナビゲーション装置によれば、現在位置を一辺の中心とし、かつ該一辺に直交する他の辺を進行方向とした四角形内にある周辺施設を検索するようにしたので、升目状に整備された道路網を有する都市部等での周辺施設の検索が容易になる。また、検索結果の周辺施設が周辺施設リストとして表示されるとともに、その位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0015】
請求項8記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、経路を探索する経路探索手段と、前記経路探索手段により探索された経路を案内する経路案内手段と、前記経路案内手段により経路案内がされている場合に、前記現在位置が円周上に位置するとともに前記現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項8記載のナビゲーション装置によれば、現在位置が円周上に位置するとともに現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を検索するようにしたので、道路地図上の案内経路に逆行する方向にある周辺施設を検索対象から除外することができるという効果がある。また、検索結果の周辺施設が周辺施設リストとして表示されるとともに、その位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0016】
請求項9記載のナビゲーション装置は、請求項8記載のナビゲーション装置において、前記施設検出手段は、前記所定直線距離が前記現在位置と前記目的地との間の直線距離より長い場合に、前記円領域の直径を前記直線距離とすることを特徴とする。請求項9記載のナビゲーション装置によれば、所定直線距離が現在位置と目的地との間の直線距離より長い場合に、円領域の直径を直線距離とするようにしたので、目的地が近い場合には検索範囲となる円が小さくなり、周辺施設の検索を確実に行えるという効果がある。
【0017】
請求項10記載のナビゲーション装置は、請求項8または請求項9記載のナビゲーション装置において、前記所定直線距離を可変に設定可能とする直線距離設定手段を備えることを特徴とする。請求項10記載のナビゲーション装置によれば、直線距離設定手段により所定直線距離を可変に設定できるようにしたので、ユーザの嗜好に合わせて検索範囲を変更することができるという効果がある。
【0018】
請求項11記載のナビゲーション装置は、請求項1ないし請求項10のいずれか1項に記載のナビゲーション装置において、前記周辺施設リストを前記道路地図上に重ねて表示する周辺施設リスト表示手段を備えることを特徴とする。請求項11記載のナビゲーション装置によれば、周辺施設リストが道路地図上に重ねて表示されるので、ユーザは周辺施設の施設名称,経路距離等の情報を、道路地図上の周辺施設の位置と同時に知ることができる。
【0019】
請求項12記載のナビゲーション装置は、請求項1ないし請求項11のいずれか1項に記載のナビゲーション装置において、前記検索範囲を道路地図上に重ねて表示する検索範囲表示手段を備えることを特徴とする。請求項12記載のナビゲーション装置によれば、検索範囲が道路地図上に重ねて表示されるので、ユーザから見てどの検索範囲の周辺施設を検索したのかが一目瞭然となるという利点がある。
【0020】
請求項13記載のナビゲーション装置は、請求項1ないし請求項12のいずれか1項に記載のナビゲーション装置において、前記周辺施設の位置を示すマークがアイコンであり、該アイコンを操作すると該当する周辺施設までの経路を表示することを特徴とする。請求項13記載のナビゲーション装置によれば、周辺施設の位置を示すマークがアイコンであるので、ユーザは当該アイコンを操作することにより、該当する周辺施設までの経路を知ることができる。
【発明を実施するための最良の形態】
【0021】
ナビゲーション装置で周辺施設を検索する際に、現在位置を基点として進行方向に向かって周辺施設の検索を行うようにして、検索された各周辺施設に向う時にすでに通過した道路を戻ることがないようにした。
【0022】
以下、本発明のナビゲーション装置を、車両用ナビゲーション装置に適用した一実施例について説明する。
【実施例1】
【0023】
図1は、本発明の実施例1に係るナビゲーション装置10の構成を示すブロック図である。本実施例1に係るナビゲーション装置10は、車両(図示せず)に搭載されており、経路検索機能や経路案内機能を有するものである。
【0024】
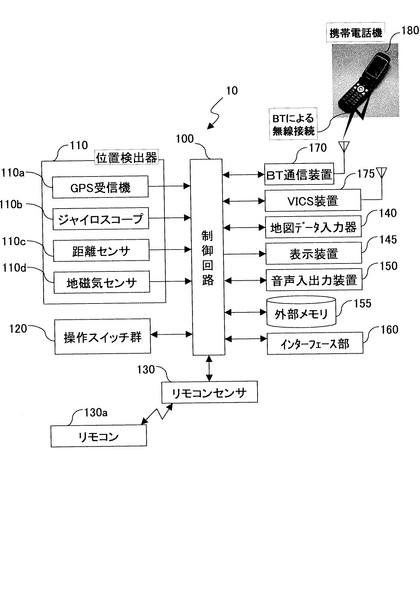
ナビゲーション装置10は、図1に示すように、車両の現在位置を検出する位置検出器110と、ユーザからの各種指示を入力するための操作スイッチ群120と、操作スイッチ群120と同様に各種指示を入力可能なリモートコントロール端末(以下、リモコンと称す。)130aと、リモコン130aからの信号を入力するリモコンセンサ130と、地図データや各種の情報を記録した記録媒体(図示せず)から地図データ等を入力する地図データ入力器140と、道路地図等の各種表示を行うための表示装置145と、各種の音声を入出力するための音声入出力装置150と、車両情報等の各種のデータを記憶するための外部メモリ155と、外部機器との有線接続を行うためのインターフェース部160と、BT(Blue Tooth)通信機能を備える外部機器との無線接続を行うためのBT通信装置170と、VICS(Vehicle Information and Communication System)路側機(図示せず)と通信を行うためのVICS装置175と、これら各種装置に接続され、これら各種装置を制御する制御回路100とを備えている。なお、符号180は、BT通信装置170と通信してハンズフリーシステム等を形成する携帯電話機を示す。
【0025】
位置検出器110は、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機110aと、角速度を検出することに基づいて方向を算出し、その算出した方向を示す方向データを取得するジャイロスコープ110bと、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ110cと、地磁気に基づいて方向を検出し、その検出した方向を表す方向データを取得する地磁気センサ110dとを備えて構成され、各構成要素が取得した各データを相互補完することによって、車両の現在位置の検出(特定)と進行方向の検出(特定)とを行う。具体的には、車両の現在位置は主にGPS受信機110aおよび距離センサ110cによって検出され、車両の進行方向はジャイロスコープ110bおよび地磁気センサ110dによって検出される。位置検出器110は、各構成要素が性質の異なる検出誤差を有するため、互いに検出誤差を補間しながら精度の高い現在位置および進行方向の検出を行うようになっているが、要求される検出精度で現在位置および進行方向を算出可能であれば全ての構成要素を備える必要はない。精度に応じて、上述したうちの一部の構成要素で構成してもよく、またステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。以上の構成によって、位置検出器110は、本発明の位置検出手段および方向検出手段として機能する。
【0026】
操作スイッチ群120は、例えば表示装置145のケースに設けられたメカニカルスイッチ,表示装置145のカラー液晶ディスプレイ上に形成されたタッチスイッチなどからなり、各種のデータや設定事項などの操作入力を制御回路100に与えるために設けられている。また、リモコンセンサ130も入力手段として設けられたもので、リモコン130aからの操作入力を受信して制御回路100に伝えるようになっている。
【0027】
地図データ入力器140は、多種類の地図描画用データ、マップマッチング用データ、ネットワークデータとしての道路データ等の地図データと、施設を示すマークデータと、案内用の画像や音声データと、施設ジャンルを例えば50音順に並べた施設ジャンルデータベースと、施設ジャンルデータベース内の各施設についての具体的情報(業種、職種などの区分を示す施設ジャンル、施設の位置データ(経緯度データ)など)を網羅した施設データベースとを含む各種のデータを入力するための装置である。これらのデータの記録媒体としては、CD−ROM(Compact Disk-Read Only Memory)、DVD−ROM(Digital Versatile Disk-Read Only Memory)、HDD(Hard Disk Drive)、メモリ、メモリカード等を用いることができる。地図データ入力器140は、本発明の地図データ記憶部として機能する。
【0028】
表示装置145は、カラー表示装置であり、液晶ディスプレイ、有機エレクトロルミネッセンスディスプレイ、プラズマディスプレイ、CRT(Cathode Ray Tube)などで構成されるが、それらのいずれを用いてもよい。表示装置145の表示画面には、位置検出器110によって検出された車両の現在位置および進行方向と地図データ入力器140より入力された地図データとから特定した現在位置および進行方向を示すマーク(現在位置・方向マーク)、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド等も表示できる。
【0029】
音声入出力装置150は、マイクロフォン、スピーカ、アンプ等からなり、ユーザの音声による指令を入力したり、地図データ入力器140より入力した施設のガイドや各種案内の音声や、インターフェース部160を介して取得した情報の読み上げ音声を出力したりすることができる。
【0030】
外部メモリ155は、車両情報等の各種データを格納する記憶装置である。
【0031】
インターフェース部160は、携帯電話機等の外部機器と有線接続するためのものである。
【0032】
BT通信装置170は、BT通信機能を有する携帯電話機180等の外部機器と無線接続するための通信装置である。
【0033】
VICS装置175は、VICSセンサやFM(Frequency Modulation)チューナなどを備えたもので、例えばVICSセンサが受信した光/電波ビーコンからの情報信号やFMチューナが受信したFM多重放送からの情報信号を制御回路100に与える構成となっており、ラジオアンテナを介して受信したFM放送信号や、道路近傍に配置されたVICSサービス用の固定局から受信した電波ビーコン信号および光ビーコン信号などを制御回路100に入力する。また、VICS装置175は、車両情報を外部へ送信する機能も備えた構成となっている。
【0034】
制御回路100は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(Input/Output)およびこれらの構成を接続するバスライン(いずれも図示せず)などからなる周知のマイクロコンピュータを中心に構成されており、ROM等に記憶されたナビゲーションプログラムに基づいて、各種制御を実行する。他にも、位置検出器110からの各検出信号に基づき車両の現在位置および進行方向を算出し、地図データ入力器140を介して読み込んだ現在位置付近の道路地図や、操作スイッチ群120やリモコン130a等の操作によって指示された範囲の道路地図等を表示装置145に表示する地図表示処理や、地図データ入力器140に格納された地点データに基づき、操作スイッチ群120やリモコン130a等の操作に従って目的地となる施設を選択し、現在位置から目的地までの最適な経路を自動的に求める経路計算を行って経路案内を行う経路案内処理を行う。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。また、RAMには、プログラム実行時の一時データや地図データ入力器140から取得した地図データなどが一時的に格納される。特に、制御回路100は、ユーザが操作スイッチ群120,リモコン130a等を操作して、図2に示すような周辺施設検索ルーチンS100を実行する機能を備えている。
【0035】
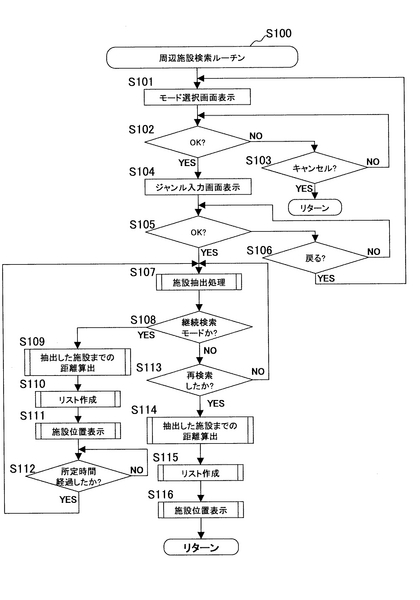
図2は、制御回路100が実行するナビゲーションプログラムにおける周辺施設検索ルーチンS100の処理を示すフローチャートである。すなわち、図2には、制御回路100による制御処理のうち、本発明の要旨に直接関係する周辺施設検索ルーチンS100の処理が示されており、ユーザは、操作スイッチ群120,リモコン130a等の操作によって制御回路100を周辺施設検索モードに切り替えることにより、図2の周辺施設検索ルーチンS100を開始させることができる。
【0036】
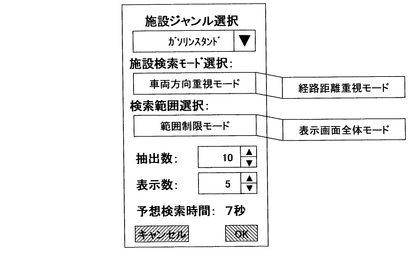
図3は、周辺施設検索時のモード設定画面の一例を示す図である。このモード設定画面は、表示装置145の画面上にウインドウ形式で表示されるものであり、モード設定画面中には、「ガソリンスタンド」等の各種施設ジャンルを選択可能とする施設ジャンル選択アイコンと、「車両方向重視モード」、「経路距離重視モード」、「両方向重視モード」(図11参照)等の各種施設検索モードを選択可能にする施設検索モード選択アイコンと、「表示画面全体モード」、「範囲制限モード」等を選択可能にする検索範囲選択アイコンと、検索により抽出する施設数を入力するための抽出数入力ウインドウと、検索した施設のうち表示装置145に表示された道路地図上に重ねて位置を示すマークを表示する施設の表示数を入力するための表示数入力ウインドウと、選択および数値入力内容を最終的に確定するときに操作される「OK」アイコンと、周辺施設検索ルーチンS100を終了するときに操作される「キャンセル」アイコンとが表示される。「車両方向重視モード」は周辺施設の検索を車両の進行方向に基づいて行うモード、「経路距離重視モード」は周辺施設の検索を現在位置から周辺施設までの経路距離に基づいて行うモード、「両方向重視モード」は「車両方向重視モード」と「経路距離重視モード」とを併せた検索特性で周辺施設の検索を行うモードである。図3では、「車両方向重視モード」が選択されている。「表示画面全体モード」は表示装置145に表示された画面全体を検索範囲として周辺施設を検索するモードであり、「範囲制限モード」は表示装置145に表示された画面の一部の領域を検索範囲として周辺施設を検索するモードである。図3では、「範囲制限モード」が選択されている。抽出数入力ウインドウおよび表示数入力ウインドウは、増減アイコンを備えたテキストボックスとして構成され、図3では、デフォルト値として抽出数「10」および表示数「5」がそれぞれ設定されている。なお、アイコンは、択一的に操作されたものが反転表示状態を呈するようになっている。
【0037】
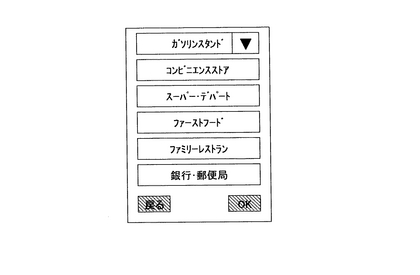
図4は、図3に示したモード設定画面から施設ジャンル選択アイコンを操作したときに遷移して表示されるジャンル入力画面の一例を示す図である。ジャンル入力画面は、例えば表示装置145に表示された画面上にウインドウ形式で表示されるものであり、検索対象の施設ジャンル(種類)を選択するために用意されている。具体的には、ジャンル入力画面中には、検索頻度が高い施設ジャンルを選択するときに選択操作されるリストボックスと、選択内容を最終的に確定するときに操作される「OK」アイコンと、モード設定画面へ戻るときに操作される「戻る」アイコンとが表示される。この場合、リストボックスは、複数の施設ジャンルを例えばポップアップ形式で表示する構成とされている。施設ジャンルとして、「ガソリンスタンド」、「コンビニエンスストア」、「スーパー・デパート」、「ファーストフード」、「ファミリーレンストラン」、および「銀行・郵便局」が選択可能に表示されている。ユーザは、カーソルを所望の施設ジャンルに移動させて、「OK」アイコンを操作することにより、当該施設ジャンルを選択する。図3では、施設ジャンルとして「ガソリンスタンド」が選択されている。なお、アイコンおよびリストボックス内の施設ジャンルは、複数のものを同時に選択可能になっており、選択されたものが反転表示状態を呈する。また、デフォルト状態では無選択状態またはユーザが予め入力した施設ジャンルに設定されている。さらに、設定された施設ジャンル毎に施設検索モードを変更することも可能である。例えば、コンビニエントストアは「車両方向重視モード」で検索する、病院やデパートは「経路距離重視モード」で検索する等の変更が可能である。
【0038】
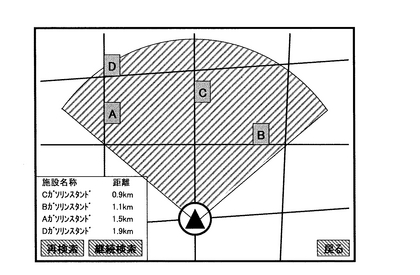
図5は、経路案内がされていない場合の周辺施設の検索例を示す図である。経路案内がされていない場合には、現在位置・方向マーク(現在位置)を基点として、道路地図上の進行方向に対して所定角度の検索範囲にある周辺施設が検索され、検索された各周辺施設までの経路距離が算出され、算出された経路距離に基づいて所定経路距離内にある周辺施設のリスト(周辺施設リスト)が作成され、作成された周辺施設リストに含まれる周辺施設の位置を示すマークが表示装置145に表示された道路地図上に重ねて表示される。なお、周辺施設の位置を示すマークをアイコンとして、このアイコンを操作することにより、該当する周辺施設までの経路を表示できるようにしてもよい。また、周辺施設リストは、各施設名称が経路距離の短い順にリストアップされるものであり、経路距離が最も短いものを第1位とした「検索順位」に対応付けて、「施設ジャンル」および「経路距離」に対応したデータが書き込まれる。図5では、4つのCガソリンスタンド、Bガソリンスタンド、Aガソリンスタンド、およびDガソリンスタンドを含む周辺施設リストが作成され、各ガソリンスタンドの位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されている。なお、現在位置・方向マークを支点とした扇形領域は、車両の進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)以内の検索範囲を示している。この検索範囲は、検索範囲表示手段として機能する制御回路100により、道路地図上に半透過表示されている。また、図5の周辺施設リスト中には、「再検索」アイコンおよび「継続検索」アイコンも表示されている。例えば、「再検索」アイコンが操作された時には、操作された時点での周辺施設の検索を再度行い、周辺施設リスト表示および道路地図上の施設位置表示を変更する。また、「継続検索」アイコンが操作された時には、ある一定時間間隔(例えば、10秒毎)で周辺施設を検索し、周辺施設リスト表示および道路地図上の施設位置表示の変更を行う。
【0039】
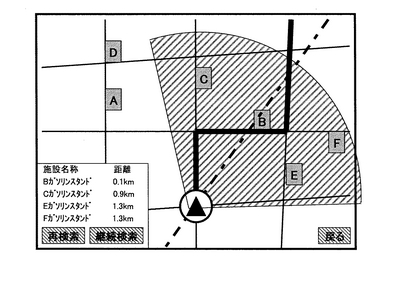
図6は、経路案内がされている場合の周辺施設の検索例を示す図である。経路案内がされている場合には、現在位置・方向マーク(現在位置)を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向(一点鎖線で示す)に対して所定角度の検索範囲にある周辺施設が検索され、検索された各周辺施設までの経路距離が算出され、算出された経路距離の短い順に周辺施設リストが作成され、作成された周辺施設リストに含まれる周辺施設の位置を示すマークが表示装置145に表示された道路地図上に重ねて表示される。図6では、4つのBガソリンスタンド,Cガソリンスタンド,EガソリンスタンドおよびFガソリンスタンドを含む周辺施設リストが作成され、各ガソリンスタンドの位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されている。なお、現在位置・方向マークを支点とした扇形領域は、最小2乗法で直線近似した進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)以内の検索範囲を示している。
【0040】
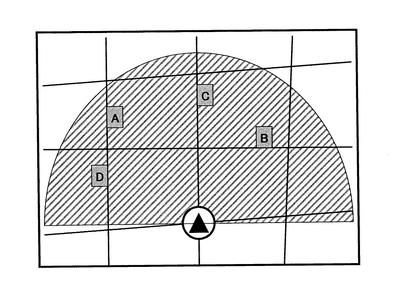
図7は、図5に示した検索範囲の変形例を示す図である。図7での検索範囲は、図5に示した検索範囲の所定角度が進行方向に対して±45度であったのに対して、これを進行方向に対して±90度とした例である。このように、検索範囲の所定角度を変化させることができるようにしてもよい。特に、検索範囲の所定角度をユーザによって可変に設定可能とする角度設定手段を設けることにより、ユーザの嗜好に合わせた周辺施設の検索が可能になる。加えて、検索範囲となる扇形領域の半径についても、ユーザによって可変に設定可能とする半径設定手段を設けることによって、ユーザの嗜好に合わせた周辺施設の検索が可能になる。
【0041】
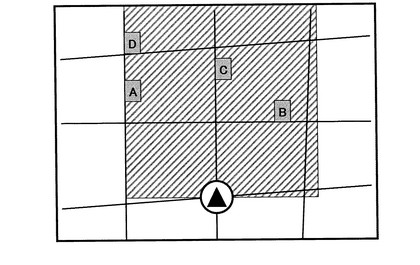
図8は、図5および図7に示した検索範囲のさらに変形例を示す図である。図5および図7での検索範囲が扇形領域(半円領域を含む)であったのに対して、図8では、現在位置を一辺の中心とし、かつ該一辺に直交する他の辺を進行方向とした四角形とするようにしたものである。検索範囲を四角形としたので、升目状に整備された道路網を有する都市部等での周辺施設の検索が容易になるという利点がある。
【0042】
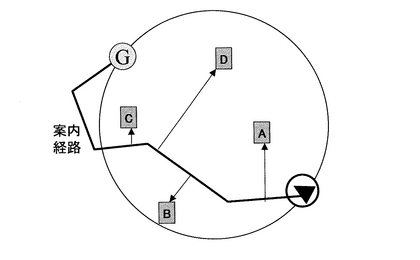
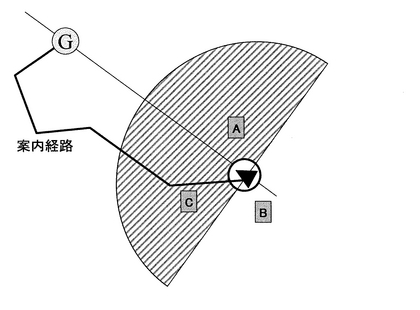
図9は、図3に示したモード設定画面において、施設検索モードとして、「経路距離重視モード」が選択された場合の検索範囲を説明する図である。経路案内がされている状態で、「経路距離重視モード」が選択されている場合には、自車両の現在位置と目的地Gとの間の直線距離が所定直線距離(例えば、10km)以内の場合には、制御回路100は、周辺施設の検索範囲を、自車両の現在位置と目的地Gとを結んだ線分を直径とする円領域とする。また、制御回路100は、案内経路から直線距離の近い順に周辺施設を検索する。このようにすれば、案内経路からできるだけ外れない周辺施設を検索できるという利点がある。つまり、自車両の現在位置から離れていても案内経路から近ければ、周辺施設が検索されて、その位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されることとなる。
【0043】
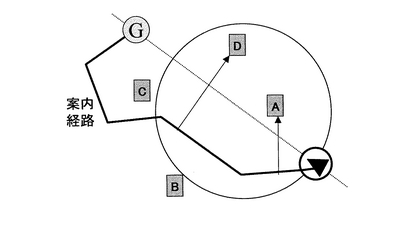
図10は、図9に示した「経路距離重視モード」での検索範囲の変形例を示す図である。この変形例は、自車両の現在位置と目的地Gとの間の直線距離が所定直線距離(例えば、10km)よりも大きい場合に、制御回路100は、検索範囲を、自車両の現在位置が円周上に位置するとともに現在位置と目的地Gとを結んだ直線上に直径を有し、所定直線距離の直径を有する円領域とする。このように検索範囲を変形することにより、現在位置からあまり遠くなく、かつ案内経路からできるだけ外れない周辺施設を検索することができるようになる。
【0044】
図11は、「車両方向重視モード」と「経路距離重視モード」とを併せた検索特性である「両方向重視モード」での周辺施設の検索例を示す図である。この「両方向重視モード」では、経路案内がされている状態で、自車両の現在位置を基点として自車両の現在位置と目的地Gとを直線で結んだ進行方向に対して±90度の角度の扇形領域(半円領域)を検索範囲として周辺施設の検索を行うことができる。この「両方向重視モード」でも、検索範囲の所定角度を±45度〜±180度の範囲でユーザによって可変に設定可能とする角度設定手段を設けることにより、ユーザの嗜好に合わせた周辺施設の検索が可能になる。加えて、検索範囲となる扇形領域の半径についても、ユーザによって可変に設定可能とする半径設定手段を設けることによって、ユーザの嗜好に合わせた周辺施設の検索が可能になる。
【0045】
次に、このように構成された本実施例1に係るナビゲーション装置10の動作について説明する。ここでは、施設ジャンルが「ガソリンスタンド」であり、施設検索モードが「車両方向重視モード」、かつ検索範囲が「範囲制限モード」である場合を例にとって、図2のフローチャートを参照しながら説明する。
【0046】
(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理
【0047】
メインルーチンで経路案内がされていない状態において、ユーザが周辺施設の検索を希望し、その操作を操作スイッチ群120,リモコン130a等によって行うと、制御回路100は、それを検知して、図2に示す周辺施設検索ルーチンS100を開始する。
【0048】
周辺施設検索ルーチンS100が開始されると、制御回路100は、まず、図3に示すモード設定画面を表示装置145に表示する(ステップS101)。
【0049】
このようなモード設定画面を表示した状態では、制御回路100は、「OK」アイコンおよび「キャンセル」アイコンのいずれかが操作されるまで待機する(ステップS102、S103)。
【0050】
いま、モード設定画面において、ユーザが、施設検索モードとして「車両方向重視モード」を選択し、かつ検索範囲として「範囲制限モード」を選択したとする。なお、抽出数および表示数は、デフォルト値「10」および「5」のままであるとする。
【0051】
すると、制御回路100は、「車両方向重視モード」、かつ「範囲制限モード」で、抽出数「10」および表示数「5」の周辺施設を検索した場合の予想検索時間を算出して、モード設定画面に表示する。例えば、図3では、予想検索時間が「7秒」と表示されている。
【0052】
表示された予想検索時間を見て時間がかかりすぎると判断して、周辺施設の検索を取り止める場合には、ユーザは、「キャンセル」アイコンを操作する。
【0053】
すると、制御回路100は、「キャンセル」アイコンが操作されたことを検出し(ステップS103:YES)、周辺施設検索ルーチンS100を終了して、メインルーチンにリターンする。
【0054】
一方、表示された予想検索時間を見た上で、周辺施設の検索を続行する場合には、ユーザは、「OK」アイコンを操作する。
【0055】
すると、制御回路100は、「OK」アイコンが操作されたことを検出し(ステップS102:YES)、図4に示すようなジャンル入力画面を表示装置145に表示する(ステップS104)。
【0056】
ジャンル入力画面を表示した状態では、制御回路100は、「OK」アイコンおよび「戻る」アイコンのいずれかが操作されるまで待機する(ステップS105、S106)。
【0057】
ここで、施設ジャンルの選択を止めてモード設定画面に戻る場合には、ユーザは、「戻る」アイコンを操作する。
【0058】
すると、制御回路100は、「戻る」アイコンが操作されたことを検出し(ステップS106:YES)、モード設定画面を表示装置145に再び表示する(ステップS101)。
【0059】
他方、施設ジャンルの選択を続ける場合には、ユーザは、ジャンル入力画面に表示された各種施設ジャンルの中から所望の施設ジャンルにカーソルを移動し、「OK」アイコンを操作する。いま、所望の施設ジャンルが「ガソリンスタンド」であったとする。
【0060】
すると、制御回路100は、「OK」アイコンが操作されたことを検出し(ステップS105:YES)、施設抽出処理ルーチンS107を実行することにより、「車両方向重視モード」、かつ「範囲制限モード」で、施設ジャンルが「ガソリンスタンド」である周辺施設の検索を開始する。
【0061】
施設抽出処理ルーチンS107では、制御回路100は、図5に示すように、現在位置・方向マーク(現在位置)を基点として、車両の進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)の扇形領域を検索範囲として施設ジャンルが「ガソリンスタンド」である周辺施設を地図データ記憶部である地図データ入力器140から検索する。この結果、進行方向に経路距離で近い順に抽出数(上位10個)までの周辺施設が検索される。
【0062】
施設抽出処理ルーチンS107の実行後、制御回路100は、設定されているモードが「継続検索モード」であるかどうかを判断する(ステップS108)。
【0063】
「継続検索モード」であれば、制御回路100は、距離算出ルーチンS109を実行することにより、現在位置と検索された各周辺施設との間の経路距離を算出する。この際、制御回路100は、経路距離が短い抽出数(上位10個)までの周辺施設については、各周辺施設を通って目的地までの予想到着時間も算出することができる。具体的には、「経路距離重視モード」での、自車両の現在位置から目的地までの経路距離、すなわち検索範囲の半径が5km以上でかなり広い場合も想定して、経路距離に応じた予想到着時間を算出する。
【0064】
次に、制御回路100は、リスト作成ルーチンS110を実行することにより、距離算出ルーチンS109で算出された経路距離が短い順に周辺施設を抽出数(上位10個)まで並べた周辺施設リストを作成し、表示数(上位5個)までの周辺施設リスト分のウインドウを表示装置145に表示された道路地図上に重ねて表示する。図5中の周辺施設リストでは、経路距離0.9kmのCガソリンスタンド、経路距離1.1kmのBガソリンスタンド、経路距離1.5kmのAガソリンスタンド、経路距離1.9kmのDガソリンスタンドが、この順で表示されている。なお、周辺施設リストを表示する際、制御回路100は、経路距離が短い抽出数(上位10個)までの周辺施設については、当該施設を実際に通って目的地までの予想到着時間も併せて表示することができる。
【0065】
続いて、制御回路100は、施設位置表示ルーチンS111を実行することにより、リスト作成ルーチンS110で表示された表示数(上位5個)までの周辺施設リスト分の周辺施設の位置を示すマークを、表示装置145に表示された道路地図上に重ねて表示する。
【0066】
周辺施設リストおよび施設位置の表示後、制御回路100は、所定時間が経過したかどうかを判断し(ステップS112)、所定時間が経過したならば(ステップS112:YES)、施設抽出処理ルーチンS107に制御を戻す。
【0067】
一方、ステップS108で「継続検索モード」でなければ、制御回路100は、周辺施設を再検索したかどうかを判断し(ステップS113)、周辺施設を再検索しなかった場合には(ステップS113:NO)、施設抽出処理ルーチンS107に制御を戻す。
【0068】
周辺施設を再検索していれば(ステップS113:YES)、制御回路100は、距離算出ルーチンS114を実行することにより、距離算出ルーチンS109の場合と同様に、現在位置から、施設抽出処理ルーチンS107で検索された各周辺施設までの経路距離を算出する。
【0069】
次に、制御回路100は、リスト作成ルーチンS115を実行することにより、リスト作成ルーチンS110の場合と同様に、周辺施設を抽出数(上位10個)まで並べた周辺施設リストを作成し、表示数(上位5個)までの周辺施設リスト分を、表示装置145に表示された道路地図上に重ねて表示する。
【0070】
続いて、制御回路100は、施設位置表示ルーチンS116を実行することにより、施設位置表示ルーチンS111の場合と同様に、リスト作成ルーチンS115で表示された周辺施設リスト分の周辺施設の位置を示すマークを、表示装置145に表示された道路地図上に重ねて表示する。表示後、制御回路100は、周辺施設検索ルーチンS100を終了してメインルーチンへリターンする。
【0071】
(2)経路案内がされている状態での周辺施設検索ルーチンS100の処理
【0072】
ナビゲーションプログラムのメインルーチン(図示せず)では、制御回路100は、目的地設定処理、経路探索処理、経路案内処理を順に実行する。まず、目的地設定処理では、制御回路100は、目的地設定のためのメニューを表示装置145に表示し、ユーザに目的地の入力を促す。次に、経路探索処理では、制御回路100は、ユーザが操作スイッチ群120,リモコン130a等の操作により目的地を入力したことを検知すると、位置検出器110から得られるデータにより自車両の現在位置を求め、該現在位置から目的地までの最適な経路を探索する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。続いて、経路案内処理では、制御回路100は、経路探索処理で求めた経路を表示装置145に表示された道路地図上に重ねて表示し、ユーザに適切な経路を案内する。また、制御回路100は、表示装置145や音声入出力装置150によって操作時のガイダンスや動作状態に応じたメッセージの報知を行う。
【0073】
メインルーチンで経路案内がされている状態において、ユーザが周辺施設の検索を希望し、その操作を操作スイッチ群120,リモコン130a等によって行うと、制御回路100は、それを検知して、図2に示す周辺施設検索ルーチンS100を開始する。
【0074】
周辺施設検索ルーチンS100において、ステップS101〜S106の処理は、既述した(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理の場合と同様であるので、その詳しい説明を省略する。
【0075】
施設抽出処理ルーチンS107では、制御回路100は、図6に示すように、現在位置・方向マーク(現在位置)を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向(一点鎖線で図示)を算出し、算出した進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)である扇形領域を検索範囲として、施設ジャンルに該当する周辺施設を地図データ記憶部である地図データ入力器140から検索する。この結果、進行方向に直線距離で近い順に抽出数(上位10個)までの周辺施設が検索される。
【0076】
以降のステップS108〜S116の処理は、既述した(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理の場合と同様であるので、その詳しい説明を省略する。
【0077】
なお、上記のように道路地図上に表示された周辺施設の位置を示すマークをアイコンとし、アイコンのいずれかを操作スイッチ群120,リモコン130a等を操作して選択できるようにすることにより、このような選択操作が行われた場合に、制御回路100は、そのアイコンに対応した周辺施設までの経路を表示する制御が行われる。
【0078】
本実施例1によれば、ユーザが周辺施設の検索を行った場合には、記録媒体中のデータベース(施設ジャンルデータベースおよび施設データベース)から、現在位置の周辺に位置する所定の抽出数の周辺施設が検索される同時に、検索された各周辺施設までの経路距離(実移動距離)が算出される。さらに、その経路距離順に並べ替えた周辺施設リストが表示装置145に表示された道路地図上に重ねて表示されるとともに、周辺施設リスト中の周辺施設の位置を示すマークが上位のものから所定の表示数だけ表示装置145に表示された道路地図上に重ねて表示されるようになる。
【0079】
また、表示装置145に表示された道路地図上に周辺施設リストが表示されるので、各周辺施設までの経路距離(実移動距離)を一目で把握できるようになり、その有用性が高まるようになる。しかも、周辺施設リストの中から表示装置145に表示された道路地図上に重ねて表示する周辺施設の表示数を、モード設定画面(図3参照)を通じて任意に変更できるから、周辺施設の位置を示すマークが道路地図上に不要に多く表示されてしまって、その表示内容が煩雑になる事態を未然に防止できる。さらに、データベースから抽出する周辺施設の数も、同じくモード設定画面を通じて任意に変更できるから、制御回路100において行われる各周辺施設までの経路演算処理の負担を軽減できるようになり、周辺施設の検索を行うときの処理速度の向上を図ることができる。
【0080】
なお、車両に乗車してエンジン始動したばかりの時に周辺施設を検索する場合には、車両の向きや進行方向がわかならいので、その場合には、表示装置145に表示された道路地図上の全ての周辺施設を検索したり、現在位置から所定半径を有する円領域である検索範囲の周辺施設を検索したりするようにする。車両がエンジン始動してから、走行したかどうかは、車両始動時の位置と現在位置とを比較し、その距離が所定半径(例えば、500m)以上になった時に車両が走行したものと判断する。
【0081】
ところで、上記実施例1では、車両用ナビゲーション装置を例に挙げて説明したが、これに限らず、街歩きまたは登山やハイキングなどに使用できる携帯型ナビゲーション装置に適用することもできる。
【0082】
以上、本発明の実施例を説明したが、これはあくまでも例示にすぎず、本発明はこれに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0083】
【図1】本発明の実施例1に係るナビゲーション装置の構成を示す回路ブロック図。
【図2】図1中の制御回路が実行する周辺施設検索ルーチンを示すフローチャート。
【図3】周辺施設検索時のモード設定画面の一例を示す図。
【図4】図3に示したモード設定画面から遷移して表示されるジャンル入力画面の一例を示す図。
【図5】経路案内がされていない場合の周辺施設の検索例を示す図。
【図6】経路案内がされている場合の周辺施設の検索例を示す図。
【図7】図5に示した検索範囲の変形例を示す図。
【図8】図7に示した検索範囲のさらに変形例を示す図。
【図9】図3に示したモード設定画面において、施設検索モードとして、経路距離重視モードが選択された場合の検索範囲を説明する図。
【図10】図9に示した経路距離重視モードでの検索範囲の変形例を示す図。
【図11】車両方向重視モードと経路距離重視モードとを併せた検索特性である両方向重視モードでの周辺施設の検索例を示す図。
【符号の説明】
【0084】
10 ナビゲーション装置
100 制御回路
110 位置検出器
110a GPS受信機
110b ジャイロスコープ
110c 距離センサ
110d 地磁気センサ
120 操作スイッチ群
130 リモコンセンサ
130a リモートコントロール端末(リモコン)
140 地図データ入力器
145 表示装置
150 音声入出力装置
155 外部メモリ
160 インターフェース部
170 ブルートゥース通信装置
175 VICS装置
180 携帯電話機
S107 施設抽出処理ルーチン(施設検索手段)
S109 距離算出ルーチン(距離算出手段)
S110 リスト作成ルーチン(リスト作成手段)
S111 施設位置表示ルーチン(施設位置表示手段)
【技術分野】
【0001】
本発明はナビゲーション装置に関し、特に施設検索機能を有するナビゲーション装置に関する。
【背景技術】
【0002】
従来技術として、現在位置から複数の施設までの経路距離あるいは移動所要時間を算出し、これらの順序で施設のリスト表示および道路地図上への表示を行うものが知られている(例えば、特許文献1、特許文献2等参照)。
【0003】
特許文献1に開示された従来のナビゲーション装置は、道路地図上に施設を検索するための検索基点を設け、その基点を中心に、所定の検索施設数になるまで検索範囲を除々に拡大するものである。
【0004】
また、特許文献2に開示された従来のナビゲーション装置は、現在位置から最寄りの施設(以下、周辺施設という)までの経路距離(実移動距離)または現在位置から周辺施設までの移動所要時間を算出するとともに、各施設ジャンルを経路距離(実移動距離)順または移動所要時間順に並び替えた周辺施設リストを作成し、その周辺施設リストおよび周辺施設リスト中の周辺施設の位置を示すアイコンを上位のものから所定の数だけ表示するものである。
【特許文献1】特開平9−292262号公報
【特許文献2】特開2001−174273号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された従来のナビゲーション装置は、道路地図上に施設を検索するための検索基点を設け、その基点を中心に、所定の検索施設数になるまで検索範囲を除々に拡大するようにしていたので、施設の検索範囲を車両の進行方向に限定することができないという課題があった。このため、ユーザが求めていない車両の進行方向に対して戻る方向にある施設までもが検索されてしまい、不要な施設の検索に無駄な検索時間が費やされていたとともに、検索結果の施設からユーザ自身が進行方向に対して戻る方向にある施設を除外して施設を決定しなければならないという不具合があった。
【0006】
また、特許文献2に開示された従来のナビゲーション装置は、現在位置から周辺施設までの経路距離(実移動距離)または現在位置から周辺施設までの移動所要時間を算出するとともに、各周辺施設を経路距離(実移動距離)順または移動所要時間順に並び替えた周辺施設リストを作成し、その周辺施設リストおよび周辺施設リスト中の周辺施設の位置を示すアイコンを上位のものから所定の数だけ表示するようにしていたので、経路案内を行っている場合でも、案内経路とは無関係な検索範囲にある周辺施設が検索され、ユーザが求める案内経路に沿った方向にある周辺施設が検索されないことがあるという課題があった。
【0007】
本発明の課題は、上述のような事情を背景になされたものであって、周辺施設を検索する際に、現在位置を基点として進行方向に向かって周辺施設の検索を行うようにして、検索された周辺施設に向う際にはすでに通過した道路を戻ることがないようにしたナビゲーション装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0008】
請求項1記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を基点として前記進行方向に向かって前記地図データ記憶部から周辺施設の検索を行う施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項1記載のナビゲーション装置によれば、周辺施設の検索を現在位置を基点として進行方向に向かって行うようにしたので、進行方向に対して戻る方向にある周辺施設を検索対象からあらかじめ除外することができるという効果がある。すなわち、従来は、ユーザが求めていない進行方向から戻る方向にある周辺施設までも検索対象としていたので、不要な周辺施設の検索に無駄な検索時間が費やされていたとともに、検索結果の周辺施設からユーザ自身が進行方向に対して戻る方向にある周辺施設を除外して周辺施設を決定しなければならないという不具合があったが、本発明では、進行方向に対して戻る方向にある周辺施設が検索対象からあらかじめ除外されるので、上記不具合が解消される。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0009】
請求項2記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を基点として前記進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項2記載のナビゲーション装置によれば、周辺施設の検索範囲を現在位置を基点として進行方向に対して所定角度の検索範囲に限定したので、進行方向に対して戻る方向にある周辺施設を検索対象から確実に除外することができるという効果がある。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0010】
請求項3記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、経路を探索する経路探索手段と、前記経路探索手段により探索された経路を案内する経路案内手段と、前記経路案内手段により経路案内がされている場合に、前記現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを有することを特徴とする。請求項3記載のナビゲーション装置によれば、周辺施設の検索範囲を現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲に限定したので、道路地図上の案内経路に逆行する方向にある周辺施設を検索対象からあらかじめ除外することができるという効果がある。また、検索結果の周辺施設の位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0011】
請求項4記載のナビゲーション装置は、請求項2または請求項3記載のナビゲーション装置において、前記所定角度を可変に設定可能とする角度設定手段を備えることを特徴とする。請求項4記載のナビゲーション装置によれば、角度設定手段により所定角度を可変に設定できるので、ユーザの嗜好に合わせて検索範囲を変更することができるという効果がある。
【0012】
請求項5記載のナビゲーション装置は、請求項2ないし請求項4のいずれか1項に記載のナビゲーション装置において、前記所定角度の検索範囲を、前記現在位置を基点とする所定半径でさらに限定した扇形領域とすることを特徴とする。請求項5記載のナビゲーション装置によれば、現在位置を基点として所定角度の検索範囲をさらに所定半径によって限定できるようにしたので、現在位置を支点とした扇形領域を検索範囲とすることができ、周辺施設の検索範囲をユーザの求めに応じてより絞り込むことが可能になる。
【0013】
請求項6記載のナビゲーション装置は、請求項2ないし請求項5のいずれか1項に記載のナビゲーション装置において、前記所定半径を可変に設定可能とする半径設定手段を備える。請求項6記載のナビゲーション装置によれば、所定半径を可変に設定可能としたので、周辺施設の検索範囲をユーザの嗜好に合わせて変更することができる。
【0014】
請求項7記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、前記現在位置を一辺の中心とし、かつ前記一辺に直交する他の辺を前記進行方向とした四角形内にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項7記載のナビゲーション装置によれば、現在位置を一辺の中心とし、かつ該一辺に直交する他の辺を進行方向とした四角形内にある周辺施設を検索するようにしたので、升目状に整備された道路網を有する都市部等での周辺施設の検索が容易になる。また、検索結果の周辺施設が周辺施設リストとして表示されるとともに、その位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0015】
請求項8記載のナビゲーション装置は、地図データを記憶する地図データ記憶部と、現在位置を検出する位置検出手段と、進行方向を検出する方向検出手段と、経路を探索する経路探索手段と、前記経路探索手段により探索された経路を案内する経路案内手段と、前記経路案内手段により経路案内がされている場合に、前記現在位置が円周上に位置するとともに前記現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段とを備えることを特徴とする。請求項8記載のナビゲーション装置によれば、現在位置が円周上に位置するとともに現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を検索するようにしたので、道路地図上の案内経路に逆行する方向にある周辺施設を検索対象から除外することができるという効果がある。また、検索結果の周辺施設が周辺施設リストとして表示されるとともに、その位置を示すマークが道路地図上に表示されるので、ユーザは希望に合致する周辺施設を素早く決定することができる。
【0016】
請求項9記載のナビゲーション装置は、請求項8記載のナビゲーション装置において、前記施設検出手段は、前記所定直線距離が前記現在位置と前記目的地との間の直線距離より長い場合に、前記円領域の直径を前記直線距離とすることを特徴とする。請求項9記載のナビゲーション装置によれば、所定直線距離が現在位置と目的地との間の直線距離より長い場合に、円領域の直径を直線距離とするようにしたので、目的地が近い場合には検索範囲となる円が小さくなり、周辺施設の検索を確実に行えるという効果がある。
【0017】
請求項10記載のナビゲーション装置は、請求項8または請求項9記載のナビゲーション装置において、前記所定直線距離を可変に設定可能とする直線距離設定手段を備えることを特徴とする。請求項10記載のナビゲーション装置によれば、直線距離設定手段により所定直線距離を可変に設定できるようにしたので、ユーザの嗜好に合わせて検索範囲を変更することができるという効果がある。
【0018】
請求項11記載のナビゲーション装置は、請求項1ないし請求項10のいずれか1項に記載のナビゲーション装置において、前記周辺施設リストを前記道路地図上に重ねて表示する周辺施設リスト表示手段を備えることを特徴とする。請求項11記載のナビゲーション装置によれば、周辺施設リストが道路地図上に重ねて表示されるので、ユーザは周辺施設の施設名称,経路距離等の情報を、道路地図上の周辺施設の位置と同時に知ることができる。
【0019】
請求項12記載のナビゲーション装置は、請求項1ないし請求項11のいずれか1項に記載のナビゲーション装置において、前記検索範囲を道路地図上に重ねて表示する検索範囲表示手段を備えることを特徴とする。請求項12記載のナビゲーション装置によれば、検索範囲が道路地図上に重ねて表示されるので、ユーザから見てどの検索範囲の周辺施設を検索したのかが一目瞭然となるという利点がある。
【0020】
請求項13記載のナビゲーション装置は、請求項1ないし請求項12のいずれか1項に記載のナビゲーション装置において、前記周辺施設の位置を示すマークがアイコンであり、該アイコンを操作すると該当する周辺施設までの経路を表示することを特徴とする。請求項13記載のナビゲーション装置によれば、周辺施設の位置を示すマークがアイコンであるので、ユーザは当該アイコンを操作することにより、該当する周辺施設までの経路を知ることができる。
【発明を実施するための最良の形態】
【0021】
ナビゲーション装置で周辺施設を検索する際に、現在位置を基点として進行方向に向かって周辺施設の検索を行うようにして、検索された各周辺施設に向う時にすでに通過した道路を戻ることがないようにした。
【0022】
以下、本発明のナビゲーション装置を、車両用ナビゲーション装置に適用した一実施例について説明する。
【実施例1】
【0023】
図1は、本発明の実施例1に係るナビゲーション装置10の構成を示すブロック図である。本実施例1に係るナビゲーション装置10は、車両(図示せず)に搭載されており、経路検索機能や経路案内機能を有するものである。
【0024】
ナビゲーション装置10は、図1に示すように、車両の現在位置を検出する位置検出器110と、ユーザからの各種指示を入力するための操作スイッチ群120と、操作スイッチ群120と同様に各種指示を入力可能なリモートコントロール端末(以下、リモコンと称す。)130aと、リモコン130aからの信号を入力するリモコンセンサ130と、地図データや各種の情報を記録した記録媒体(図示せず)から地図データ等を入力する地図データ入力器140と、道路地図等の各種表示を行うための表示装置145と、各種の音声を入出力するための音声入出力装置150と、車両情報等の各種のデータを記憶するための外部メモリ155と、外部機器との有線接続を行うためのインターフェース部160と、BT(Blue Tooth)通信機能を備える外部機器との無線接続を行うためのBT通信装置170と、VICS(Vehicle Information and Communication System)路側機(図示せず)と通信を行うためのVICS装置175と、これら各種装置に接続され、これら各種装置を制御する制御回路100とを備えている。なお、符号180は、BT通信装置170と通信してハンズフリーシステム等を形成する携帯電話機を示す。
【0025】
位置検出器110は、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機110aと、角速度を検出することに基づいて方向を算出し、その算出した方向を示す方向データを取得するジャイロスコープ110bと、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ110cと、地磁気に基づいて方向を検出し、その検出した方向を表す方向データを取得する地磁気センサ110dとを備えて構成され、各構成要素が取得した各データを相互補完することによって、車両の現在位置の検出(特定)と進行方向の検出(特定)とを行う。具体的には、車両の現在位置は主にGPS受信機110aおよび距離センサ110cによって検出され、車両の進行方向はジャイロスコープ110bおよび地磁気センサ110dによって検出される。位置検出器110は、各構成要素が性質の異なる検出誤差を有するため、互いに検出誤差を補間しながら精度の高い現在位置および進行方向の検出を行うようになっているが、要求される検出精度で現在位置および進行方向を算出可能であれば全ての構成要素を備える必要はない。精度に応じて、上述したうちの一部の構成要素で構成してもよく、またステアリングの回転センサや各転動輪の車輪センサ等を用いてもよい。以上の構成によって、位置検出器110は、本発明の位置検出手段および方向検出手段として機能する。
【0026】
操作スイッチ群120は、例えば表示装置145のケースに設けられたメカニカルスイッチ,表示装置145のカラー液晶ディスプレイ上に形成されたタッチスイッチなどからなり、各種のデータや設定事項などの操作入力を制御回路100に与えるために設けられている。また、リモコンセンサ130も入力手段として設けられたもので、リモコン130aからの操作入力を受信して制御回路100に伝えるようになっている。
【0027】
地図データ入力器140は、多種類の地図描画用データ、マップマッチング用データ、ネットワークデータとしての道路データ等の地図データと、施設を示すマークデータと、案内用の画像や音声データと、施設ジャンルを例えば50音順に並べた施設ジャンルデータベースと、施設ジャンルデータベース内の各施設についての具体的情報(業種、職種などの区分を示す施設ジャンル、施設の位置データ(経緯度データ)など)を網羅した施設データベースとを含む各種のデータを入力するための装置である。これらのデータの記録媒体としては、CD−ROM(Compact Disk-Read Only Memory)、DVD−ROM(Digital Versatile Disk-Read Only Memory)、HDD(Hard Disk Drive)、メモリ、メモリカード等を用いることができる。地図データ入力器140は、本発明の地図データ記憶部として機能する。
【0028】
表示装置145は、カラー表示装置であり、液晶ディスプレイ、有機エレクトロルミネッセンスディスプレイ、プラズマディスプレイ、CRT(Cathode Ray Tube)などで構成されるが、それらのいずれを用いてもよい。表示装置145の表示画面には、位置検出器110によって検出された車両の現在位置および進行方向と地図データ入力器140より入力された地図データとから特定した現在位置および進行方向を示すマーク(現在位置・方向マーク)、目的地までの誘導経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイド等も表示できる。
【0029】
音声入出力装置150は、マイクロフォン、スピーカ、アンプ等からなり、ユーザの音声による指令を入力したり、地図データ入力器140より入力した施設のガイドや各種案内の音声や、インターフェース部160を介して取得した情報の読み上げ音声を出力したりすることができる。
【0030】
外部メモリ155は、車両情報等の各種データを格納する記憶装置である。
【0031】
インターフェース部160は、携帯電話機等の外部機器と有線接続するためのものである。
【0032】
BT通信装置170は、BT通信機能を有する携帯電話機180等の外部機器と無線接続するための通信装置である。
【0033】
VICS装置175は、VICSセンサやFM(Frequency Modulation)チューナなどを備えたもので、例えばVICSセンサが受信した光/電波ビーコンからの情報信号やFMチューナが受信したFM多重放送からの情報信号を制御回路100に与える構成となっており、ラジオアンテナを介して受信したFM放送信号や、道路近傍に配置されたVICSサービス用の固定局から受信した電波ビーコン信号および光ビーコン信号などを制御回路100に入力する。また、VICS装置175は、車両情報を外部へ送信する機能も備えた構成となっている。
【0034】
制御回路100は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(Input/Output)およびこれらの構成を接続するバスライン(いずれも図示せず)などからなる周知のマイクロコンピュータを中心に構成されており、ROM等に記憶されたナビゲーションプログラムに基づいて、各種制御を実行する。他にも、位置検出器110からの各検出信号に基づき車両の現在位置および進行方向を算出し、地図データ入力器140を介して読み込んだ現在位置付近の道路地図や、操作スイッチ群120やリモコン130a等の操作によって指示された範囲の道路地図等を表示装置145に表示する地図表示処理や、地図データ入力器140に格納された地点データに基づき、操作スイッチ群120やリモコン130a等の操作に従って目的地となる施設を選択し、現在位置から目的地までの最適な経路を自動的に求める経路計算を行って経路案内を行う経路案内処理を行う。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。また、RAMには、プログラム実行時の一時データや地図データ入力器140から取得した地図データなどが一時的に格納される。特に、制御回路100は、ユーザが操作スイッチ群120,リモコン130a等を操作して、図2に示すような周辺施設検索ルーチンS100を実行する機能を備えている。
【0035】
図2は、制御回路100が実行するナビゲーションプログラムにおける周辺施設検索ルーチンS100の処理を示すフローチャートである。すなわち、図2には、制御回路100による制御処理のうち、本発明の要旨に直接関係する周辺施設検索ルーチンS100の処理が示されており、ユーザは、操作スイッチ群120,リモコン130a等の操作によって制御回路100を周辺施設検索モードに切り替えることにより、図2の周辺施設検索ルーチンS100を開始させることができる。
【0036】
図3は、周辺施設検索時のモード設定画面の一例を示す図である。このモード設定画面は、表示装置145の画面上にウインドウ形式で表示されるものであり、モード設定画面中には、「ガソリンスタンド」等の各種施設ジャンルを選択可能とする施設ジャンル選択アイコンと、「車両方向重視モード」、「経路距離重視モード」、「両方向重視モード」(図11参照)等の各種施設検索モードを選択可能にする施設検索モード選択アイコンと、「表示画面全体モード」、「範囲制限モード」等を選択可能にする検索範囲選択アイコンと、検索により抽出する施設数を入力するための抽出数入力ウインドウと、検索した施設のうち表示装置145に表示された道路地図上に重ねて位置を示すマークを表示する施設の表示数を入力するための表示数入力ウインドウと、選択および数値入力内容を最終的に確定するときに操作される「OK」アイコンと、周辺施設検索ルーチンS100を終了するときに操作される「キャンセル」アイコンとが表示される。「車両方向重視モード」は周辺施設の検索を車両の進行方向に基づいて行うモード、「経路距離重視モード」は周辺施設の検索を現在位置から周辺施設までの経路距離に基づいて行うモード、「両方向重視モード」は「車両方向重視モード」と「経路距離重視モード」とを併せた検索特性で周辺施設の検索を行うモードである。図3では、「車両方向重視モード」が選択されている。「表示画面全体モード」は表示装置145に表示された画面全体を検索範囲として周辺施設を検索するモードであり、「範囲制限モード」は表示装置145に表示された画面の一部の領域を検索範囲として周辺施設を検索するモードである。図3では、「範囲制限モード」が選択されている。抽出数入力ウインドウおよび表示数入力ウインドウは、増減アイコンを備えたテキストボックスとして構成され、図3では、デフォルト値として抽出数「10」および表示数「5」がそれぞれ設定されている。なお、アイコンは、択一的に操作されたものが反転表示状態を呈するようになっている。
【0037】
図4は、図3に示したモード設定画面から施設ジャンル選択アイコンを操作したときに遷移して表示されるジャンル入力画面の一例を示す図である。ジャンル入力画面は、例えば表示装置145に表示された画面上にウインドウ形式で表示されるものであり、検索対象の施設ジャンル(種類)を選択するために用意されている。具体的には、ジャンル入力画面中には、検索頻度が高い施設ジャンルを選択するときに選択操作されるリストボックスと、選択内容を最終的に確定するときに操作される「OK」アイコンと、モード設定画面へ戻るときに操作される「戻る」アイコンとが表示される。この場合、リストボックスは、複数の施設ジャンルを例えばポップアップ形式で表示する構成とされている。施設ジャンルとして、「ガソリンスタンド」、「コンビニエンスストア」、「スーパー・デパート」、「ファーストフード」、「ファミリーレンストラン」、および「銀行・郵便局」が選択可能に表示されている。ユーザは、カーソルを所望の施設ジャンルに移動させて、「OK」アイコンを操作することにより、当該施設ジャンルを選択する。図3では、施設ジャンルとして「ガソリンスタンド」が選択されている。なお、アイコンおよびリストボックス内の施設ジャンルは、複数のものを同時に選択可能になっており、選択されたものが反転表示状態を呈する。また、デフォルト状態では無選択状態またはユーザが予め入力した施設ジャンルに設定されている。さらに、設定された施設ジャンル毎に施設検索モードを変更することも可能である。例えば、コンビニエントストアは「車両方向重視モード」で検索する、病院やデパートは「経路距離重視モード」で検索する等の変更が可能である。
【0038】
図5は、経路案内がされていない場合の周辺施設の検索例を示す図である。経路案内がされていない場合には、現在位置・方向マーク(現在位置)を基点として、道路地図上の進行方向に対して所定角度の検索範囲にある周辺施設が検索され、検索された各周辺施設までの経路距離が算出され、算出された経路距離に基づいて所定経路距離内にある周辺施設のリスト(周辺施設リスト)が作成され、作成された周辺施設リストに含まれる周辺施設の位置を示すマークが表示装置145に表示された道路地図上に重ねて表示される。なお、周辺施設の位置を示すマークをアイコンとして、このアイコンを操作することにより、該当する周辺施設までの経路を表示できるようにしてもよい。また、周辺施設リストは、各施設名称が経路距離の短い順にリストアップされるものであり、経路距離が最も短いものを第1位とした「検索順位」に対応付けて、「施設ジャンル」および「経路距離」に対応したデータが書き込まれる。図5では、4つのCガソリンスタンド、Bガソリンスタンド、Aガソリンスタンド、およびDガソリンスタンドを含む周辺施設リストが作成され、各ガソリンスタンドの位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されている。なお、現在位置・方向マークを支点とした扇形領域は、車両の進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)以内の検索範囲を示している。この検索範囲は、検索範囲表示手段として機能する制御回路100により、道路地図上に半透過表示されている。また、図5の周辺施設リスト中には、「再検索」アイコンおよび「継続検索」アイコンも表示されている。例えば、「再検索」アイコンが操作された時には、操作された時点での周辺施設の検索を再度行い、周辺施設リスト表示および道路地図上の施設位置表示を変更する。また、「継続検索」アイコンが操作された時には、ある一定時間間隔(例えば、10秒毎)で周辺施設を検索し、周辺施設リスト表示および道路地図上の施設位置表示の変更を行う。
【0039】
図6は、経路案内がされている場合の周辺施設の検索例を示す図である。経路案内がされている場合には、現在位置・方向マーク(現在位置)を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向(一点鎖線で示す)に対して所定角度の検索範囲にある周辺施設が検索され、検索された各周辺施設までの経路距離が算出され、算出された経路距離の短い順に周辺施設リストが作成され、作成された周辺施設リストに含まれる周辺施設の位置を示すマークが表示装置145に表示された道路地図上に重ねて表示される。図6では、4つのBガソリンスタンド,Cガソリンスタンド,EガソリンスタンドおよびFガソリンスタンドを含む周辺施設リストが作成され、各ガソリンスタンドの位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されている。なお、現在位置・方向マークを支点とした扇形領域は、最小2乗法で直線近似した進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)以内の検索範囲を示している。
【0040】
図7は、図5に示した検索範囲の変形例を示す図である。図7での検索範囲は、図5に示した検索範囲の所定角度が進行方向に対して±45度であったのに対して、これを進行方向に対して±90度とした例である。このように、検索範囲の所定角度を変化させることができるようにしてもよい。特に、検索範囲の所定角度をユーザによって可変に設定可能とする角度設定手段を設けることにより、ユーザの嗜好に合わせた周辺施設の検索が可能になる。加えて、検索範囲となる扇形領域の半径についても、ユーザによって可変に設定可能とする半径設定手段を設けることによって、ユーザの嗜好に合わせた周辺施設の検索が可能になる。
【0041】
図8は、図5および図7に示した検索範囲のさらに変形例を示す図である。図5および図7での検索範囲が扇形領域(半円領域を含む)であったのに対して、図8では、現在位置を一辺の中心とし、かつ該一辺に直交する他の辺を進行方向とした四角形とするようにしたものである。検索範囲を四角形としたので、升目状に整備された道路網を有する都市部等での周辺施設の検索が容易になるという利点がある。
【0042】
図9は、図3に示したモード設定画面において、施設検索モードとして、「経路距離重視モード」が選択された場合の検索範囲を説明する図である。経路案内がされている状態で、「経路距離重視モード」が選択されている場合には、自車両の現在位置と目的地Gとの間の直線距離が所定直線距離(例えば、10km)以内の場合には、制御回路100は、周辺施設の検索範囲を、自車両の現在位置と目的地Gとを結んだ線分を直径とする円領域とする。また、制御回路100は、案内経路から直線距離の近い順に周辺施設を検索する。このようにすれば、案内経路からできるだけ外れない周辺施設を検索できるという利点がある。つまり、自車両の現在位置から離れていても案内経路から近ければ、周辺施設が検索されて、その位置を示すマークが表示装置145に表示された道路地図上に重ねて表示されることとなる。
【0043】
図10は、図9に示した「経路距離重視モード」での検索範囲の変形例を示す図である。この変形例は、自車両の現在位置と目的地Gとの間の直線距離が所定直線距離(例えば、10km)よりも大きい場合に、制御回路100は、検索範囲を、自車両の現在位置が円周上に位置するとともに現在位置と目的地Gとを結んだ直線上に直径を有し、所定直線距離の直径を有する円領域とする。このように検索範囲を変形することにより、現在位置からあまり遠くなく、かつ案内経路からできるだけ外れない周辺施設を検索することができるようになる。
【0044】
図11は、「車両方向重視モード」と「経路距離重視モード」とを併せた検索特性である「両方向重視モード」での周辺施設の検索例を示す図である。この「両方向重視モード」では、経路案内がされている状態で、自車両の現在位置を基点として自車両の現在位置と目的地Gとを直線で結んだ進行方向に対して±90度の角度の扇形領域(半円領域)を検索範囲として周辺施設の検索を行うことができる。この「両方向重視モード」でも、検索範囲の所定角度を±45度〜±180度の範囲でユーザによって可変に設定可能とする角度設定手段を設けることにより、ユーザの嗜好に合わせた周辺施設の検索が可能になる。加えて、検索範囲となる扇形領域の半径についても、ユーザによって可変に設定可能とする半径設定手段を設けることによって、ユーザの嗜好に合わせた周辺施設の検索が可能になる。
【0045】
次に、このように構成された本実施例1に係るナビゲーション装置10の動作について説明する。ここでは、施設ジャンルが「ガソリンスタンド」であり、施設検索モードが「車両方向重視モード」、かつ検索範囲が「範囲制限モード」である場合を例にとって、図2のフローチャートを参照しながら説明する。
【0046】
(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理
【0047】
メインルーチンで経路案内がされていない状態において、ユーザが周辺施設の検索を希望し、その操作を操作スイッチ群120,リモコン130a等によって行うと、制御回路100は、それを検知して、図2に示す周辺施設検索ルーチンS100を開始する。
【0048】
周辺施設検索ルーチンS100が開始されると、制御回路100は、まず、図3に示すモード設定画面を表示装置145に表示する(ステップS101)。
【0049】
このようなモード設定画面を表示した状態では、制御回路100は、「OK」アイコンおよび「キャンセル」アイコンのいずれかが操作されるまで待機する(ステップS102、S103)。
【0050】
いま、モード設定画面において、ユーザが、施設検索モードとして「車両方向重視モード」を選択し、かつ検索範囲として「範囲制限モード」を選択したとする。なお、抽出数および表示数は、デフォルト値「10」および「5」のままであるとする。
【0051】
すると、制御回路100は、「車両方向重視モード」、かつ「範囲制限モード」で、抽出数「10」および表示数「5」の周辺施設を検索した場合の予想検索時間を算出して、モード設定画面に表示する。例えば、図3では、予想検索時間が「7秒」と表示されている。
【0052】
表示された予想検索時間を見て時間がかかりすぎると判断して、周辺施設の検索を取り止める場合には、ユーザは、「キャンセル」アイコンを操作する。
【0053】
すると、制御回路100は、「キャンセル」アイコンが操作されたことを検出し(ステップS103:YES)、周辺施設検索ルーチンS100を終了して、メインルーチンにリターンする。
【0054】
一方、表示された予想検索時間を見た上で、周辺施設の検索を続行する場合には、ユーザは、「OK」アイコンを操作する。
【0055】
すると、制御回路100は、「OK」アイコンが操作されたことを検出し(ステップS102:YES)、図4に示すようなジャンル入力画面を表示装置145に表示する(ステップS104)。
【0056】
ジャンル入力画面を表示した状態では、制御回路100は、「OK」アイコンおよび「戻る」アイコンのいずれかが操作されるまで待機する(ステップS105、S106)。
【0057】
ここで、施設ジャンルの選択を止めてモード設定画面に戻る場合には、ユーザは、「戻る」アイコンを操作する。
【0058】
すると、制御回路100は、「戻る」アイコンが操作されたことを検出し(ステップS106:YES)、モード設定画面を表示装置145に再び表示する(ステップS101)。
【0059】
他方、施設ジャンルの選択を続ける場合には、ユーザは、ジャンル入力画面に表示された各種施設ジャンルの中から所望の施設ジャンルにカーソルを移動し、「OK」アイコンを操作する。いま、所望の施設ジャンルが「ガソリンスタンド」であったとする。
【0060】
すると、制御回路100は、「OK」アイコンが操作されたことを検出し(ステップS105:YES)、施設抽出処理ルーチンS107を実行することにより、「車両方向重視モード」、かつ「範囲制限モード」で、施設ジャンルが「ガソリンスタンド」である周辺施設の検索を開始する。
【0061】
施設抽出処理ルーチンS107では、制御回路100は、図5に示すように、現在位置・方向マーク(現在位置)を基点として、車両の進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)の扇形領域を検索範囲として施設ジャンルが「ガソリンスタンド」である周辺施設を地図データ記憶部である地図データ入力器140から検索する。この結果、進行方向に経路距離で近い順に抽出数(上位10個)までの周辺施設が検索される。
【0062】
施設抽出処理ルーチンS107の実行後、制御回路100は、設定されているモードが「継続検索モード」であるかどうかを判断する(ステップS108)。
【0063】
「継続検索モード」であれば、制御回路100は、距離算出ルーチンS109を実行することにより、現在位置と検索された各周辺施設との間の経路距離を算出する。この際、制御回路100は、経路距離が短い抽出数(上位10個)までの周辺施設については、各周辺施設を通って目的地までの予想到着時間も算出することができる。具体的には、「経路距離重視モード」での、自車両の現在位置から目的地までの経路距離、すなわち検索範囲の半径が5km以上でかなり広い場合も想定して、経路距離に応じた予想到着時間を算出する。
【0064】
次に、制御回路100は、リスト作成ルーチンS110を実行することにより、距離算出ルーチンS109で算出された経路距離が短い順に周辺施設を抽出数(上位10個)まで並べた周辺施設リストを作成し、表示数(上位5個)までの周辺施設リスト分のウインドウを表示装置145に表示された道路地図上に重ねて表示する。図5中の周辺施設リストでは、経路距離0.9kmのCガソリンスタンド、経路距離1.1kmのBガソリンスタンド、経路距離1.5kmのAガソリンスタンド、経路距離1.9kmのDガソリンスタンドが、この順で表示されている。なお、周辺施設リストを表示する際、制御回路100は、経路距離が短い抽出数(上位10個)までの周辺施設については、当該施設を実際に通って目的地までの予想到着時間も併せて表示することができる。
【0065】
続いて、制御回路100は、施設位置表示ルーチンS111を実行することにより、リスト作成ルーチンS110で表示された表示数(上位5個)までの周辺施設リスト分の周辺施設の位置を示すマークを、表示装置145に表示された道路地図上に重ねて表示する。
【0066】
周辺施設リストおよび施設位置の表示後、制御回路100は、所定時間が経過したかどうかを判断し(ステップS112)、所定時間が経過したならば(ステップS112:YES)、施設抽出処理ルーチンS107に制御を戻す。
【0067】
一方、ステップS108で「継続検索モード」でなければ、制御回路100は、周辺施設を再検索したかどうかを判断し(ステップS113)、周辺施設を再検索しなかった場合には(ステップS113:NO)、施設抽出処理ルーチンS107に制御を戻す。
【0068】
周辺施設を再検索していれば(ステップS113:YES)、制御回路100は、距離算出ルーチンS114を実行することにより、距離算出ルーチンS109の場合と同様に、現在位置から、施設抽出処理ルーチンS107で検索された各周辺施設までの経路距離を算出する。
【0069】
次に、制御回路100は、リスト作成ルーチンS115を実行することにより、リスト作成ルーチンS110の場合と同様に、周辺施設を抽出数(上位10個)まで並べた周辺施設リストを作成し、表示数(上位5個)までの周辺施設リスト分を、表示装置145に表示された道路地図上に重ねて表示する。
【0070】
続いて、制御回路100は、施設位置表示ルーチンS116を実行することにより、施設位置表示ルーチンS111の場合と同様に、リスト作成ルーチンS115で表示された周辺施設リスト分の周辺施設の位置を示すマークを、表示装置145に表示された道路地図上に重ねて表示する。表示後、制御回路100は、周辺施設検索ルーチンS100を終了してメインルーチンへリターンする。
【0071】
(2)経路案内がされている状態での周辺施設検索ルーチンS100の処理
【0072】
ナビゲーションプログラムのメインルーチン(図示せず)では、制御回路100は、目的地設定処理、経路探索処理、経路案内処理を順に実行する。まず、目的地設定処理では、制御回路100は、目的地設定のためのメニューを表示装置145に表示し、ユーザに目的地の入力を促す。次に、経路探索処理では、制御回路100は、ユーザが操作スイッチ群120,リモコン130a等の操作により目的地を入力したことを検知すると、位置検出器110から得られるデータにより自車両の現在位置を求め、該現在位置から目的地までの最適な経路を探索する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。続いて、経路案内処理では、制御回路100は、経路探索処理で求めた経路を表示装置145に表示された道路地図上に重ねて表示し、ユーザに適切な経路を案内する。また、制御回路100は、表示装置145や音声入出力装置150によって操作時のガイダンスや動作状態に応じたメッセージの報知を行う。
【0073】
メインルーチンで経路案内がされている状態において、ユーザが周辺施設の検索を希望し、その操作を操作スイッチ群120,リモコン130a等によって行うと、制御回路100は、それを検知して、図2に示す周辺施設検索ルーチンS100を開始する。
【0074】
周辺施設検索ルーチンS100において、ステップS101〜S106の処理は、既述した(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理の場合と同様であるので、その詳しい説明を省略する。
【0075】
施設抽出処理ルーチンS107では、制御回路100は、図6に示すように、現在位置・方向マーク(現在位置)を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向(一点鎖線で図示)を算出し、算出した進行方向に対して所定角度(例えば±45度)で、かつ所定半径(例えば2km)である扇形領域を検索範囲として、施設ジャンルに該当する周辺施設を地図データ記憶部である地図データ入力器140から検索する。この結果、進行方向に直線距離で近い順に抽出数(上位10個)までの周辺施設が検索される。
【0076】
以降のステップS108〜S116の処理は、既述した(1)経路案内がされていない状態での周辺施設検索ルーチンS100の処理の場合と同様であるので、その詳しい説明を省略する。
【0077】
なお、上記のように道路地図上に表示された周辺施設の位置を示すマークをアイコンとし、アイコンのいずれかを操作スイッチ群120,リモコン130a等を操作して選択できるようにすることにより、このような選択操作が行われた場合に、制御回路100は、そのアイコンに対応した周辺施設までの経路を表示する制御が行われる。
【0078】
本実施例1によれば、ユーザが周辺施設の検索を行った場合には、記録媒体中のデータベース(施設ジャンルデータベースおよび施設データベース)から、現在位置の周辺に位置する所定の抽出数の周辺施設が検索される同時に、検索された各周辺施設までの経路距離(実移動距離)が算出される。さらに、その経路距離順に並べ替えた周辺施設リストが表示装置145に表示された道路地図上に重ねて表示されるとともに、周辺施設リスト中の周辺施設の位置を示すマークが上位のものから所定の表示数だけ表示装置145に表示された道路地図上に重ねて表示されるようになる。
【0079】
また、表示装置145に表示された道路地図上に周辺施設リストが表示されるので、各周辺施設までの経路距離(実移動距離)を一目で把握できるようになり、その有用性が高まるようになる。しかも、周辺施設リストの中から表示装置145に表示された道路地図上に重ねて表示する周辺施設の表示数を、モード設定画面(図3参照)を通じて任意に変更できるから、周辺施設の位置を示すマークが道路地図上に不要に多く表示されてしまって、その表示内容が煩雑になる事態を未然に防止できる。さらに、データベースから抽出する周辺施設の数も、同じくモード設定画面を通じて任意に変更できるから、制御回路100において行われる各周辺施設までの経路演算処理の負担を軽減できるようになり、周辺施設の検索を行うときの処理速度の向上を図ることができる。
【0080】
なお、車両に乗車してエンジン始動したばかりの時に周辺施設を検索する場合には、車両の向きや進行方向がわかならいので、その場合には、表示装置145に表示された道路地図上の全ての周辺施設を検索したり、現在位置から所定半径を有する円領域である検索範囲の周辺施設を検索したりするようにする。車両がエンジン始動してから、走行したかどうかは、車両始動時の位置と現在位置とを比較し、その距離が所定半径(例えば、500m)以上になった時に車両が走行したものと判断する。
【0081】
ところで、上記実施例1では、車両用ナビゲーション装置を例に挙げて説明したが、これに限らず、街歩きまたは登山やハイキングなどに使用できる携帯型ナビゲーション装置に適用することもできる。
【0082】
以上、本発明の実施例を説明したが、これはあくまでも例示にすぎず、本発明はこれに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0083】
【図1】本発明の実施例1に係るナビゲーション装置の構成を示す回路ブロック図。
【図2】図1中の制御回路が実行する周辺施設検索ルーチンを示すフローチャート。
【図3】周辺施設検索時のモード設定画面の一例を示す図。
【図4】図3に示したモード設定画面から遷移して表示されるジャンル入力画面の一例を示す図。
【図5】経路案内がされていない場合の周辺施設の検索例を示す図。
【図6】経路案内がされている場合の周辺施設の検索例を示す図。
【図7】図5に示した検索範囲の変形例を示す図。
【図8】図7に示した検索範囲のさらに変形例を示す図。
【図9】図3に示したモード設定画面において、施設検索モードとして、経路距離重視モードが選択された場合の検索範囲を説明する図。
【図10】図9に示した経路距離重視モードでの検索範囲の変形例を示す図。
【図11】車両方向重視モードと経路距離重視モードとを併せた検索特性である両方向重視モードでの周辺施設の検索例を示す図。
【符号の説明】
【0084】
10 ナビゲーション装置
100 制御回路
110 位置検出器
110a GPS受信機
110b ジャイロスコープ
110c 距離センサ
110d 地磁気センサ
120 操作スイッチ群
130 リモコンセンサ
130a リモートコントロール端末(リモコン)
140 地図データ入力器
145 表示装置
150 音声入出力装置
155 外部メモリ
160 インターフェース部
170 ブルートゥース通信装置
175 VICS装置
180 携帯電話機
S107 施設抽出処理ルーチン(施設検索手段)
S109 距離算出ルーチン(距離算出手段)
S110 リスト作成ルーチン(リスト作成手段)
S111 施設位置表示ルーチン(施設位置表示手段)
【特許請求の範囲】
【請求項1】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を基点として前記進行方向に向かって前記地図データ記憶部から周辺施設の検索を行う施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項2】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を基点として前記進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項3】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
経路を探索する経路探索手段と、
前記経路探索手段により探索された経路を案内する経路案内手段と、
前記経路案内手段により経路案内がされている場合に、前記現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を有することを特徴とするナビゲーション装置。
【請求項4】
前記所定角度を可変に設定可能とする角度設定手段を備える請求項2または請求項3記載のナビゲーション装置。
【請求項5】
前記所定角度の検索範囲を、前記現在位置を基点とする所定半径でさらに限定した扇形領域とする請求項2ないし請求項4のいずれか1項に記載のナビゲーション装置。
【請求項6】
前記所定半径を可変に設定可能とする半径設定手段を備える請求項2ないし請求項5のいずれか1項に記載のナビゲーション装置。
【請求項7】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を一辺の中心とし、かつ前記一辺に直交する他の辺を前記進行方向とした四角形内にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項8】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
経路を探索する経路探索手段と、
前記経路探索手段により探索された経路を案内する経路案内手段と、
前記経路案内手段により経路案内がされている場合に、前記現在位置が円周上に位置するとともに前記現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項9】
前記所定直線距離が前記現在位置と前記目的地との間の直線距離より長い場合に、前記円領域の直径を前記直線距離とする請求項8記載のナビゲーション装置。
【請求項10】
前記所定直線距離を可変に設定可能とする直線距離設定手段を備える請求項8または請求項9記載のナビゲーション装置。
【請求項11】
前記周辺施設リストを前記道路地図上に重ねて表示する周辺施設リスト表示手段を備える請求項1ないし請求項10のいずれか1項に記載のナビゲーション装置。
【請求項12】
前記検索範囲を道路地図上に重ねて表示する検索範囲表示手段を備える請求項2ないし請求項11のいずれか1項に記載のナビゲーション装置。
【請求項13】
前記周辺施設の位置を示すマークがアイコンであり、該アイコンを操作すると該当する周辺施設までの経路を表示する請求項1ないし請求項12のいずれか1項に記載のナビゲーション装置。
【請求項1】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を基点として前記進行方向に向かって前記地図データ記憶部から周辺施設の検索を行う施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項2】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を基点として前記進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項3】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
経路を探索する経路探索手段と、
前記経路探索手段により探索された経路を案内する経路案内手段と、
前記経路案内手段により経路案内がされている場合に、前記現在位置を基点として、道路地図上の案内経路を最小2乗法で直線近似した進行方向に対して所定角度の検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を有することを特徴とするナビゲーション装置。
【請求項4】
前記所定角度を可変に設定可能とする角度設定手段を備える請求項2または請求項3記載のナビゲーション装置。
【請求項5】
前記所定角度の検索範囲を、前記現在位置を基点とする所定半径でさらに限定した扇形領域とする請求項2ないし請求項4のいずれか1項に記載のナビゲーション装置。
【請求項6】
前記所定半径を可変に設定可能とする半径設定手段を備える請求項2ないし請求項5のいずれか1項に記載のナビゲーション装置。
【請求項7】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
前記現在位置を一辺の中心とし、かつ前記一辺に直交する他の辺を前記進行方向とした四角形内にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項8】
地図データを記憶する地図データ記憶部と、
現在位置を検出する位置検出手段と、
進行方向を検出する方向検出手段と、
経路を探索する経路探索手段と、
前記経路探索手段により探索された経路を案内する経路案内手段と、
前記経路案内手段により経路案内がされている場合に、前記現在位置が円周上に位置するとともに前記現在位置と目的地とを結んだ直線上にあって所定直線距離以内の直径を有する円領域を検索範囲とし、該検索範囲にある周辺施設を前記地図データ記憶部から検索する施設検索手段と、
前記現在位置から前記施設検索手段により検索された各周辺施設までの経路距離を算出する距離算出手段と、
前記距離算出手段により算出された経路距離の短い順に周辺施設リストを作成するリスト作成手段と、
前記リスト作成手段により作成された周辺施設リストに含まれる周辺施設の位置を示すマークを道路地図上に重ねて表示する施設位置表示手段と
を備えることを特徴とするナビゲーション装置。
【請求項9】
前記所定直線距離が前記現在位置と前記目的地との間の直線距離より長い場合に、前記円領域の直径を前記直線距離とする請求項8記載のナビゲーション装置。
【請求項10】
前記所定直線距離を可変に設定可能とする直線距離設定手段を備える請求項8または請求項9記載のナビゲーション装置。
【請求項11】
前記周辺施設リストを前記道路地図上に重ねて表示する周辺施設リスト表示手段を備える請求項1ないし請求項10のいずれか1項に記載のナビゲーション装置。
【請求項12】
前記検索範囲を道路地図上に重ねて表示する検索範囲表示手段を備える請求項2ないし請求項11のいずれか1項に記載のナビゲーション装置。
【請求項13】
前記周辺施設の位置を示すマークがアイコンであり、該アイコンを操作すると該当する周辺施設までの経路を表示する請求項1ないし請求項12のいずれか1項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−266757(P2006−266757A)
【公開日】平成18年10月5日(2006.10.5)
【国際特許分類】
【出願番号】特願2005−82452(P2005−82452)
【出願日】平成17年3月22日(2005.3.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年10月5日(2006.10.5)
【国際特許分類】
【出願日】平成17年3月22日(2005.3.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]