
ナビゲーション装置
【課題】狭Y字の分岐点などといった地点でユーザが誤認識や誤走行することを防止できるナビゲーション装置を提供する。
【解決手段】経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段7と、位置方位検出手段によって検出された位置が特徴点から所定距離以内になったときに、勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段5と、経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段6とを備えている。
【解決手段】経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段7と、位置方位検出手段によって検出された位置が特徴点から所定距離以内になったときに、勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段5と、経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段6とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ユーザを目的地に案内するナビゲーション装置に関し、特に道路の勾配に関する案内を行う技術に関する。
【背景技術】
【0002】
従来、道路の勾配に関する案内を行うナビゲーション装置として、特許文献1は、道路の傾斜データや、周辺の建物データ、現地での道路の見え方を考慮して案内内容を決定し、ユーザの感覚に適合する音声案内を行うナビゲーション装置を開示している。このナビゲーション装置は、地図データを取得する地図データ取得手段と、地図データを用いて任意の2地点の走行経路を求める経路探索手段と、地図データを用いて現在位置を検出する現在位置検出手段と、経路探索手段によって求めた現在位置から目的地までの走行経路の交差点において、交差点に進入する道路とほぼ直線に接続される道なり道路を判定する道なり道路判定手段と、道なり道路に基づいて案内内容を決定する案内内容決定手段と、案内内容に基づいて音声案内を行う音声発生手段とを備えている。
【0003】
また、特許文献2は、立体交差点に適した経路案内を行うことができるようにしたナビゲーション装置を開示している。このナビゲーション装置は、次の案内交差点が立体交差点である場合に、その案内交差点において進入する道路と退出する道路とから立体交差点の絵柄パターンのデータと矢印パターンのデータを地図データ記憶媒体から読み出して、表示装置に絵柄パターンと矢印パターンを用いた経路案内図を表示させ、また、その矢印パターンのデータに対応した立体表現情報を地図データ記憶媒体から取得して案内音声用のデータを作成し、立体表現を用いた案内音声を発生させる。例えば、国道23号線の高架道路から降りる場合には、「まもなく国道23号線を降ります」、国道23号線の高架道路に上る場合には、「まもなく国道23号線に乗ります」といった、立体表現の案内音声を発生させる。
【0004】
【特許文献1】特開2002−71371号公報
【特許文献2】特開2002−236026号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した特許文献1に開示されたナビゲーション装置では、右左折と判断しがたい交差点に関して道なりに進むべき旨が案内される。しかしながら、この道なり道路と判断される並走道路、つまり、道なり道路の形状である狭Y字の分岐地点に車両が接近したときに、ユーザは、経路探索により探索された経路がどちらの道路にあり、その道路にどのように進めばよいのかの判断に迷い、誤認識や誤走行することがある。
【0006】
また、特許文献2に開示されたナビゲーション装置では、予め地図データの情報として保持されている立体交差点について案内されるが、地図データに立体交差点の情報が存在しない分岐点や交差点については、ユーザは、経路探索により探索された経路がどちらの道路にあり、その道路にどのように進めばよいのかの判断に迷い、誤認識や誤走行することがある。
【0007】
この発明は、上述した問題を解決するためになされたものであり、狭Y字の分岐点などといった地点でユーザが誤認識や誤走行することを防止できるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るナビゲーション装置は、地図情報を取得する地図情報取得手段と、位置および方位を検出する位置方位検出手段と、目的地を入力する入力手段と、位置方位検出手段で検出された位置から入力手段によって入力された目的地までの最適経路を地図情報取得手段によって取得された地図情報に基づき計算する経路探索手段と、経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段と、位置方位検出手段によって検出された位置が特徴点から所定距離以内になったときに、勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段と、経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段とを備えている。
【発明の効果】
【0009】
この発明によれば、最適経路上において所定の条件を満たす特徴点、例えば狭Y字の分岐点といったユーザが誤認識や誤走行するおそれの地点において道路の勾配に関する勾配案内の要否を判定し、特徴点から所定距離以内になったときに、特徴点における勾配案内が必要であれば案内データを生成し、この案内データに基づき案内メッセージを出力するように構成したので、特徴点におけるユーザの誤認識や誤走行を防止できる。
【発明を実施するための最良の形態】
【0010】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
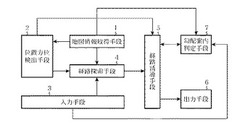
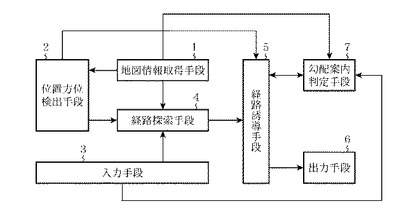
図1は、この発明の実施の形態1に係るナビゲーション装置の機能的な構成を示すブロック図である。このナビゲーション装置は、地図情報取得手段1、位置方位検出手段2、入力手段3、経路探索手段4、経路誘導手段5、出力手段6および勾配案内判定手段7から構成されている。
【0011】
地図情報取得手段1は、地図情報としての地図データを取得する。この地図情報取得手段で取得された地図データは、位置方位検出手段2、経路探索手段4および勾配案内判定手段7に送られる。位置方位検出手段2は、地図情報取得手段1から送られてくる地図データに基づいて、車両の位置および方位を検出する。この位置方位検出手段2で検出された位置および方位を表す位置方位データは、経路探索手段4および経路誘導手段5に送られる。
【0012】
入力手段3は、目的地、勾配角度範囲(詳細は後述する)といった種々の設定情報を入力するために使用される。この入力手段3で入力された情報は、経路探索手段4および勾配案内判定手段7に送られる。経路探索手段4は、位置方位検出手段2で検出された位置から、入力手段3によって入力された目的地までの最適経路を、地図情報取得手段1から送られてくる地図データに基づいて計算する。この経路探索手段4で計算された最適経路を表す経路データは、経路誘導手段5に送られる。
【0013】
経路誘導手段5は、経路探索手段4から送られてくる経路データと、位置方位検出手段2から送られてくる位置方位データにしたがって特徴点を検出し、この検出した特徴点における案内データを、勾配案内判定手段7からの判定結果に応じて作成する。この経路誘導手段5で作成された案内データは、出力手段6に送られる。なお、この明細書では、特徴点とは、ユーザが誤認識や誤走行する可能性が高いと判断される最適経路上の地点をいう。
【0014】
出力手段6は、経路誘導手段5から送られてくる案内データにしたがって、案内メッセージを表示し、または音声として出力する。勾配案内判定手段7は、特徴点に接続される複数の道路の勾配の相関から勾配案内を行うべきか否かを判定する。この勾配案内判定手段7による判定結果は、経路誘導手段5に送られる。
【0015】
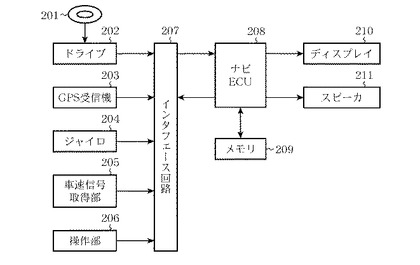
次に、図1に示した各機能を実現するためのナビゲーション装置のハードウェア構成を、図2に示すブロック図を参照しながら説明する。
【0016】
ナビゲーション装置は、メディア201、ドライブ202、GPS(Global Positioning System)受信機203、ジャイロ204、車速信号取得部205、操作部206、インタフェース回路207、ナビECU(Electronic Control Unit ;電子制御装置)208、メモリ209、ディスプレイ210およびスピーカ211から構成されている。
【0017】
メディア201は、例えばDVD(Digital Versatile Disk)やハードディスク(Hard disk)といった記憶媒体から構成されている。このメディア201に記憶されている地図データは、ドライブ202によって読み出される。ドライブ202は、メディア201に記憶されている地図データを読み出し、インタフェース回路207を介してナビECU208に送る。上述した地図情報取得手段1は、主としてメディア201およびドライブ202から構成されている。
【0018】
GPS受信機203は、自己の絶対位置や絶対方位を検出する。このGPS受信機203で検出された絶対位置および絶対方位は、位置方位データとして、インタフェース回路207を介してナビECU208に送られる。ジャイロ204は、車両の旋回時の角速度を検出する。このジャイロ204で検出された角速度は、角速度データとして、インタフェース回路207を介してナビECU208に送られる。
【0019】
車速信号取得部205は、図示しない車両から所定走行距離毎に送られてくる車速信号(車速パルス)を取得する。この車速信号取得部205で取得された車速信号は、速度データとして、インタフェース回路207を介してナビECU208に送られる。上述した位置方位検出手段2は、主としてGPS受信機203、ジャイロ204および車速信号取得部205から構成されている。
【0020】
操作部206は、ユーザ操作の入力を受付けるためのボタンやタッチパネルなどから構成されている。この操作部206から入力された情報は、操作データとして、インタフェース回路207を介してナビECU208に送られる。上述した入力手段3は、主として操作部206から構成されている。
【0021】
インタフェース回路207は、ナビECU208からの制御信号にしたがって、ドライブ202から読み出した地図データ、GPS受信機203から送られてきた位置方位データ、ジャイロ204から送られてくる角速度データ、車速信号取得部205から送られてくる角速度データおよび操作部206から送られてくる操作データをナビECU208に送るための制御を行う。
【0022】
ナビECU208は、インタフェース回路207から送られてくる地図データ、位置方位データ、角速度データ、車速データおよび操作データをメモリ209に書き込むとともに、これらのデータをメモリ209から読み出し、この読み出したデータを用いて各種処理を実行する。上述した経路探索手段4、経路誘導手段5および勾配案内判定手段7は、主としてナビECU208およびメモリ209から構成されている。
【0023】
ディスプレイ210は、例えば液晶ディスプレイから構成されており、ナビECU208から送られてくるデータにしたがって、地図、最適経路、自車マーク、案内メッセージなどを表示する。スピーカ211は、ナビECU208から送られてくるデータにしたがって、案内メッセージを音声で出力する。上述した出力手段6は、主としてディスプレイ210およびスピーカ211から構成されている。
【0024】
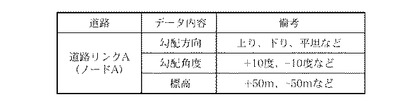
次に、この実施の形態1に係るナビゲーション装置で使用される地図データのうち、この発明に特徴的な部分について説明する。図3は、地図データに含まれる道路リンクまたはノードに対応付けて予め格納される勾配情報のフォーマットを示す。道路を構成する道路リンクA(またはノードA)に対応させて、勾配方向、勾配角度および標高から成る勾配情報が格納されている。勾配方向は、「上り」、「下り」および「平坦」といった勾配の方向を示す。勾配角度は、別途規定されている道路の方向に対して、例えば+10度や−10度といった傾斜があることを示す。標高は、+50mや−50mといった道路の標高値を示す。
【0025】
なお、標高値が地図データに含まれている場合は、接続前道路リンク(またはノード)の標高値と当該道路リンク(またはノード)の標高値との差を、リンク長(またはノード間距離)で除算し、三角関数より+10度や−10度といった勾配角度を求めるように構成できる。また、+5度〜−5度の勾配角度範囲を平坦とみなし、+10度を越える、または−10度を下回る勾配角度範囲を急傾斜とみなす、といった勾配角度範囲が、予め入力手段3を用いて設定されているものとする。
【0026】
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーション装置の動作を説明する。なお、以下では、経路探索手段4において最適経路(以下、単に「経路」という)が計算されて、その計算結果が経路探索手段4の内部に保存されているものとする。
【0027】
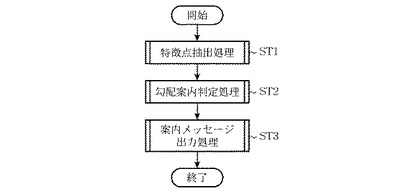
まず、この発明の実施の形態1に係るナビゲーション装置の概略の動作を、図4に示すフローチャートを参照しながら説明する。まず、経路上の特徴点を抽出する特徴点抽出処理が実行される(ステップST1)。すなわち、ユーザが誤認識や誤走行する可能性が高い地点が特徴点として抽出される。この特徴点抽出処理の詳細は後述する。
【0028】
次いで、勾配案内判定処理が実行される(ステップST2)。すなわち、ステップST1において抽出された特徴点に接続される各道路の勾配の相関から、勾配案内を行うべきか否かが判定される。この勾配案内判定処理の詳細は後述する。次いで、案内メッセージ出力処理が行われる(ステップST3)。すなわち、既存の案内メッセージに勾配案内が組み合わせられて出力される。この案内メッセージ出力処理の詳細は後述する。
【0029】
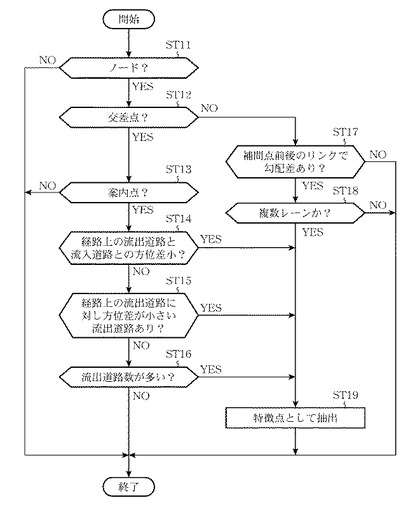
次に、図4のステップST1で実行される特徴点抽出処理の詳細を、図5に示すフローチャートを参照しながら説明する。この特徴点抽出処理は、経路誘導手段5によって行われる。
【0030】
特徴点抽出処理では、まず、現在位置から所定距離以内にノードが存在するかどうかが調べられる(ステップST11)。すなわち、経路誘導手段5は、位置方位検出手段2で検出された位置から所定距離以内に、経路探索手段4から送られてくる経路データによって示される経路上のノードが存在するかどうかを調べる。このステップST11において、ノードが存在しないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0031】
一方、上記ステップST11において、ノードが存在することが判断されると、次いで、そのノードは交差点であるかどうかが調べられる(ステップST12)。これは、そのノードに対応する地図データを調べることにより行われる。このステップST12において交差点であることが判断されると、次いで、その交差点は案内点、つまり案内メッセージを出力すべき地点であるかどうかが調べられる(ステップST13)。交差点が案内点であるかどうかの情報は、予め地図データに格納されている。このステップST13において、その交差点が案内点でないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0032】
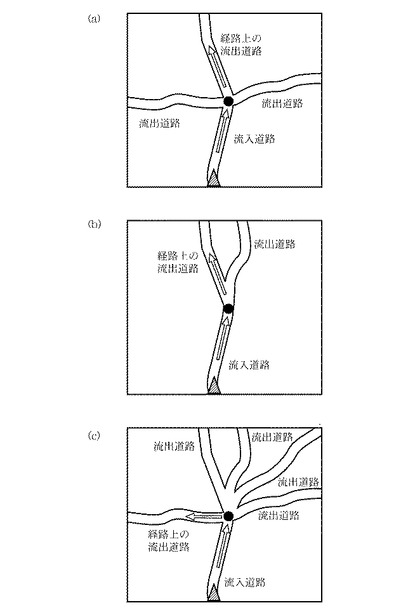
上記ステップST13において、交差点が案内点であることが判断されると、次いで、経路上の流出道路(交差点から出る道路)と流入道路(交差点に入る道路)との方位差が所定値より小さいかどうかが調べられる(ステップST14)。例えば、図6(a)に黒丸印で示すような交差点では、経路上の流出道路と流入道路との方位差が所定値より小さいと判断される。このステップST14において、方位差が所定値より小さいことが判断されると、シーケンスはステップST19に進み、その交差点(案内点)は、ユーザが誤認識や誤走行する可能性が高いと判断され、特徴点として抽出される。
【0033】
一方、ステップST14において、方位差が所定値より小さくないことが判断されると、次いで、経路上の流出道路に対して方位差が小さい他の流出道路が存在するかどうかが調べられる(ステップST15)。例えば、図6(b)に黒丸印で示すような交差点では、経路上の流出道路に対して方位差が所定値より小さい他の流出道路があると判断される。このステップST15において、方位差が所定値より小さい他の流出道路があると判断されると、シーケンスはステップST19に進み、その交差点(案内点)が特徴点として抽出される。
【0034】
一方、上記ステップST15において、方位差が所定値より小さい他の流出道路がないことが判断されると、次いで、流出道路の数が所定値より多いかどうかが調べられる(ステップST16)。例えば、図6(c)に黒丸印で示すような交差点では、流出道路の数が所定値より多いと判断される。このステップST16において、流出道路の数が所定値より多いことが判断されると、シーケンスはステップST19に進み、その交差点(案内点)が特徴点として抽出される。一方、ステップST16において、流出道路の数が所定値より多くないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0035】
上記ステップST12において、ノードが交差点でないことが判断されると、補間点である旨が認識され、補間点の前後の道路リンクで勾配差があるかどうかが調べられる(ステップST17)。これは、その補間点(ノード)の勾配情報に含まれる勾配角度の差を調べることにより行われる。このステップST17において、勾配差がないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0036】
一方、ステップST17において、勾配差があることが判断されると、その道路は複数レーンであるかどうかが調べられる(ステップST18)。このステップST18において、複数レーンでないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。一方、ステップST18において、複数レーンであることが判断されると、シーケンスはステップST19に進み、そのノード(補間点)が特徴点であると判断される。すなわち、交差点ではない一本道の道路において勾配の変化がある地点が特徴点として抽出される。その後、特徴点抽出処理は終了する。
【0037】
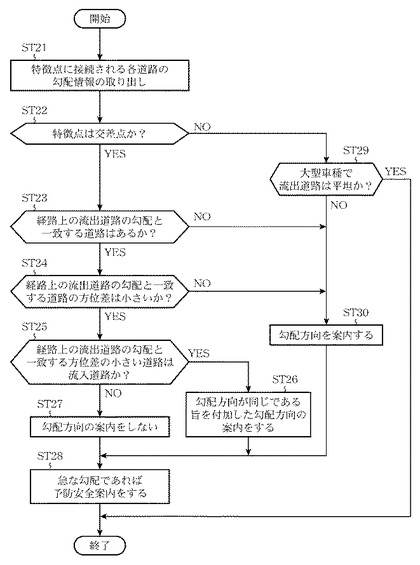
次に、図4のステップST2で実行される勾配案内判定処理の詳細を、図7に示すフローチャートを参照しながら説明する。この勾配案内判定処理は、勾配案内判定手段7によって実行される。なお、この勾配案内判定処理は、上述した特徴点抽出処理において特徴点が抽出された場合にのみ実行される。
【0038】
勾配案内判定処理では、まず、上述した特徴点抽出処理において抽出された特徴点に接続される各道路の勾配情報が取り出され、「上り」、「下り」および「平坦」の3種類に分類される(ステップST21)。次いで、特徴点が交差点であるかどうかが調べられる(ステップST22)。このステップST22において、特徴点が交差点であることが判断されると、次いで、特徴点に接続される複数の道路に対応付けられた勾配情報によって表される勾配の相関が調べられる(ステップST23〜ST25)。具体的には、まず、経路上の流出道路の勾配に一致する勾配を有する道路(流入道路を含む)があるかどうかが調べられる(ステップST23)。
【0039】
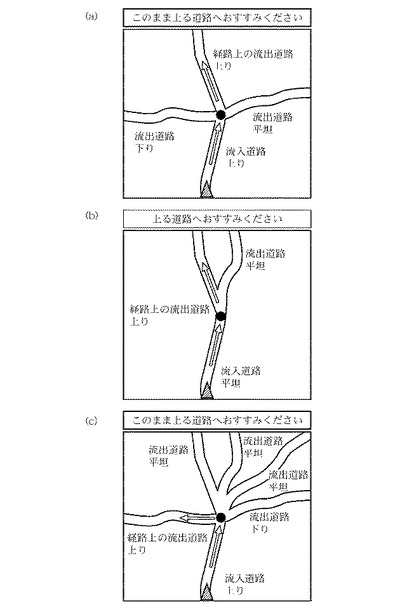
このステップST23において、経路上の流出道路の勾配に一致する勾配を有する道路がないことが判断されると、経路上の流出道路の勾配方向を案内すると判定される(ステップST30)。この場合、後に実行される案内メッセージ出力処理においては、例えば図8(b)に示すような狭Y字分岐の交差点において、経路上の流出道路の勾配方向が「上り」であれば「上る道路へおすすみください」という音声案内がなされ、「下り」であれば「下る道路へおすすみください」、「平坦」であれば「平坦道路へおすすみください」という音声案内がなされる。
【0040】
なお、例えば、経路上の流出道路の勾配方向が「上り」である場合は、経路上の流出道路以外の道路が全て平坦な道路であれば、「上る道路へおすすみください」という音声案内のかわりに「平坦でない道路へおすすみください」と音声案内するように構成することができる。また、経路上の流出道路が平坦で、他の道路が全て平坦ではない道路であれば、「上る道路へおすすみください」という音声案内のかわりに「平坦な道路へおすすみください」と音声案内するように構成することもできる。その後、シーケンスはステップST28に進む。
【0041】
上記のステップST23において、経路上の流出道路の勾配に一致する勾配を有する道路があることが判断されると、その経路上の流出道路の勾配に一致する勾配を有する道路(流入道路を含む)と経路上の流出道路との方位差が所定値より小さいかどうかが調べられる(ステップST24)。このステップST24において、方位差が所定値より小さくないことが判断されると、シーケンスはステップST30へ進み、上述したように、経路上の流出道路の勾配方向を案内すると判定される。
【0042】
一方、ステップST24において、方位差が所定値より小さいことが判断されると、次いで、経路上の流出道路の勾配に一致する勾配を有し、且つ方位差が所定値より小さい道路が流入道路であるかどうかが調べられる(ステップST25)。このステップST25において、流入道路でないことが判断されると、経路上の流出道路の勾配方向を案内しないと判定される(ステップST27)。この場合、後に実行される案内メッセージ出力処理において、音声案内は行われない。その後、シーケンスはステップST28に進む。
【0043】
上記ステップST25において、流入道路であることが判断されると、ユーザが誤認識や誤走行するおそれがある交差点であることが認識され、経路上の流出道路が流入道路と同じ勾配方向である旨を付加した勾配方向を案内すると判定される(ステップST26)。この場合、後に実行される案内メッセージ出力処理において、例えば、図8(a)および図8(c)に示すように、経路上の流出道路の勾配方向が「上り」であれば「このまま上る道路へおすすみください」という音声案内がなされる。ここで言う「流入道路と同じ勾配方向である旨」とは、音声案内の「このまま」に該当する。その後、シーケンスはステップST28に進む。
【0044】
上記ステップST22において、特徴点が交差点でないことが判断されると、当該特徴点は補間点である旨が認識され、次いで、当該ナビゲーション装置を搭載している車両が大型車種であって、且つ、経路上の流出道路の勾配方向は平坦であるかどうかが調べられる(ステップST29)。なお、大型車種であるかどうかを表す車種情報は、予め入力手段3から入力され、勾配案内判定手段7の内部、具体的にはメモリ209に記憶されているものとする。このステップST29において、大型車種であって、且つ、経路上の流出道路の勾配方向は平坦であることが判断されると、勾配案内の判定が行われることなく勾配案内判定処理は終了する。
【0045】
一方、ステップST29において、大型車種であって、且つ、経路上の流出道路の勾配方向は平坦でないことが判断されると、シーケンスはステップST30に進み、経路上の流出道路の勾配方向を案内すると判定される。この場合、特徴点が交差点でないので、後に実行される案内メッセージ出力処理においては、例えば、経路上の流出道路の勾配方向が「上り」であれば「左側車線、登坂車線を走行してください」という音声案内がなされる。その後、シーケンスはステップST28に進む。
【0046】
ステップST28では、特徴点の勾配角度に応じて勾配案内の要否が判定される。具体的には、経路上の流出道路が急な上りまたは下りの勾配であれば、予防安全案内を行うと判定される。この場合、後に実行される案内メッセージ出力処理において、例えば、経路上の流出道路が急な下りの勾配であれば、「急な下り坂です。気をつけてください」という音声案内が出力される。なお、この場合の音声案内は、車両の移動速度を考慮して出力するように構成できる。例えば、勾配案内判定手段7は、車速信号取得部205から速度データを取得し、この速度データが所定の速度以上を示している場合に、上記音声案内を出力するように構成できる。
【0047】
なお、特徴点が交差点でない場合は案内図は表示されないので、例えば、「左側車線、登坂車線を走行してください」および「急な下り坂です。気をつけてください」という音声案内をスピーカ211から出力するとともに、これらの内容を表すテロップをディスプレイ210に表示するように構成することもできる。
【0048】
次に、図4のステップST3で実行される案内メッセージ出力処理の詳細を、図9に示すフローチャートを参照しながら説明する。この案内メッセージ出力処理は、経路誘導手段5によって実行される。
【0049】
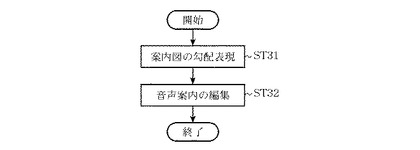
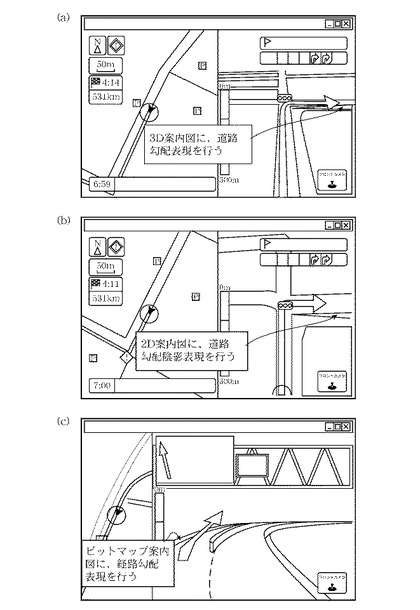
案内メッセージ出力処理では、まず、特徴点が交差点であれば、案内図の勾配表現が行われる(ステップST31)。図10は、道路や経路について勾配差を表す勾配表現を行った案内図の例を示す図である。図10(a)は、3D案内図に陰影または鳥瞰図といった勾配差を表す道路勾配表現を行った例を示している。また、図10(b)は、2D案内図に勾配差を表す道路勾配陰影表現を行った例を示している。さらに、図10(c)は、ビットマップ案内図に経路の陰影または鳥瞰図といった勾配差を表す勾配表現を行った例を示している。このようにして生成された案内情報が出力手段6に送られ、ディスプレイ210に案内メッセージが表示される。
【0050】
道路や経路の勾配表現は、地図データに予め登録されているビットマップ等の画像データを用いて行うことができる。また、道路や経路の勾配表現は、プログラムで演算し、または保持しているポリゴン等の領域を描画することにより行うこともできる。
【0051】
次いで、音声案内の編集が行われる(ステップST32)。すなわち、所定の優先順位に従って、既存の音声案内に、勾配差を表す勾配方向の音声案内を付加する処理が行われる。この処理によって生成された案内情報が出力手段6に送られ、スピーカ211から音声案内のメッセージが出力される。
【0052】
所定の優先順位は、例えば以下のように決定することができる。以下に示す例では、括弧内の数字が小さいものが優先順位が高い案内項目である。なお、各案内項目の右側には、音声案内の例を示している。
(1)右左折の案内:「(まもなく)左方向です」
(2)その先の交差点の案内(連続交差点案内):「(その先)左方向です」
(3)カーブ案内:「(この先)右方向にカーブします」
(4)勾配道路案内:「上る道路へおすすみください」
(5)目印案内:「××ストアが目印です」
(6)交差点名称案内:「三輪交差点を」
(7)地先名称案内:「横浜方面へ」
(8)道なり案内:「(この先)道なりです」
(9)合流案内:「(この先)左からの合流があります」
(10)踏み切り案内:「(この先)踏み切りです」
(11)交通情報案内:「(この先)渋滞があります」
【0053】
上述した優先順位に従って、既存の音声案内に勾配方向の音声案内を付加して編集した音声案内の例を以下に示す。なお、車両が移動中にユーザが認識できる案内の情報は限られるので、別途の設定によりユーザに提供する情報の量が制限されている。
【0054】
例えば、既存の「まもなく、ななめ左方向です。」という音声案内に対し、「このまま上る道路へおすすみください」という勾配方向の音声案内が付加されて、「まもなく、ななめ左方向です。このまま上る道路へおすすみください」といった音声案内が作成される。
【0055】
また、既存の「まもなく、横浜方面へ左方向です。この先、右方向にカーブします。××ストアが目印です。」という音声案内に対し、「上る道路へおすすみください」という勾配方向の音声案内が付加されて、「まもなく、左方向です。この先、右方向にカーブして上る道路へおすすみください。」といった音声案内が作成される。この場合、「横浜方面へ」や「××ストアが目印です」という案内は優先順位が低いので、これらを削除して所定の情報量に納める編集が行われて音声案内が作成される。
【0056】
なお、上述したステップST31における案内図の表示においては、音声案内の案内項目のうち所定の優先順位に該当する案内項目のみ強調して表示するように構成することもできる。
【0057】
以上説明したように、この発明の実施の形態1に係るナビゲーション装置によれば、狭Y字分岐などユーザが誤認識や誤走行をするおそれのある地点に対して、道路および経路の勾配を図示した案内図を表示し、また、既存の音声案内に道路の勾配についての音声案内を組み合わせて所定の優先順位で音声案内するように構成したので、案内地点でユーザが誤認識また誤走行することを防止できる。
【0058】
具体的には、例えば「上る道路へおすすみください」、「平坦な道路へおすすみください」、「平坦ではない道路へおすすみください」といった音声案内と道路勾配を表現した交差点の案内図の表示が行われ、また、トラック等の大型車種では「左側車線、登坂車線を走行してください」とレーン案内が行われるので、ユーザの誤認識または誤走行を防止できる。また、傾斜が急な道路においては「急な下り坂があります」や「急な上り坂があります」といった予防安全案内を行うことができる。
【図面の簡単な説明】
【0059】
【図1】この発明の実施の形態1に係るナビゲーション装置の機能的な構成を示すブロック図である。
【図2】図1に示した各機能を実現するためのナビゲーション装置のハードウェア構成を示すブロック図である。
【図3】この発明の実施の形態1に係るナビゲーション装置で使用される地図データの道路リンクまたはノードに予め格納される勾配情報のフォーマットを示す図である。
【図4】この発明の実施の形態1に係るナビゲーション装置の概略の動作を示すフローチャートである。
【図5】図4に示す特徴点抽出処理の詳細を示すフローチャートである。
【図6】図4に示す特徴点抽出処理を説明するための図である。
【図7】図4に示す勾配案内判定処理の詳細を示すフローチャートである。
【図8】図4に示す勾配案内判定処理を説明するための図である。
【図9】図4に示す案内メッセージ出力処理の詳細を示すフローチャートである。
【図10】図4に示す案内メッセージ出力処理を説明するための図である。
【符号の説明】
【0060】
1 地図情報取得手段、2 位置方位検出手段、3 入力手段、4 経路探索手段、5 経路誘導手段、6 出力手段、7 勾配案内判定手段、201 メディア、202 ドライブ、203 GPS受信機、204 ジャイロ、205 車速信号取得部、206 操作部、207 インタフェース回路、208 ナビECU、209 メモリ、210 ディスプレイ、211 スピーカ。
【技術分野】
【0001】
この発明は、ユーザを目的地に案内するナビゲーション装置に関し、特に道路の勾配に関する案内を行う技術に関する。
【背景技術】
【0002】
従来、道路の勾配に関する案内を行うナビゲーション装置として、特許文献1は、道路の傾斜データや、周辺の建物データ、現地での道路の見え方を考慮して案内内容を決定し、ユーザの感覚に適合する音声案内を行うナビゲーション装置を開示している。このナビゲーション装置は、地図データを取得する地図データ取得手段と、地図データを用いて任意の2地点の走行経路を求める経路探索手段と、地図データを用いて現在位置を検出する現在位置検出手段と、経路探索手段によって求めた現在位置から目的地までの走行経路の交差点において、交差点に進入する道路とほぼ直線に接続される道なり道路を判定する道なり道路判定手段と、道なり道路に基づいて案内内容を決定する案内内容決定手段と、案内内容に基づいて音声案内を行う音声発生手段とを備えている。
【0003】
また、特許文献2は、立体交差点に適した経路案内を行うことができるようにしたナビゲーション装置を開示している。このナビゲーション装置は、次の案内交差点が立体交差点である場合に、その案内交差点において進入する道路と退出する道路とから立体交差点の絵柄パターンのデータと矢印パターンのデータを地図データ記憶媒体から読み出して、表示装置に絵柄パターンと矢印パターンを用いた経路案内図を表示させ、また、その矢印パターンのデータに対応した立体表現情報を地図データ記憶媒体から取得して案内音声用のデータを作成し、立体表現を用いた案内音声を発生させる。例えば、国道23号線の高架道路から降りる場合には、「まもなく国道23号線を降ります」、国道23号線の高架道路に上る場合には、「まもなく国道23号線に乗ります」といった、立体表現の案内音声を発生させる。
【0004】
【特許文献1】特開2002−71371号公報
【特許文献2】特開2002−236026号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した特許文献1に開示されたナビゲーション装置では、右左折と判断しがたい交差点に関して道なりに進むべき旨が案内される。しかしながら、この道なり道路と判断される並走道路、つまり、道なり道路の形状である狭Y字の分岐地点に車両が接近したときに、ユーザは、経路探索により探索された経路がどちらの道路にあり、その道路にどのように進めばよいのかの判断に迷い、誤認識や誤走行することがある。
【0006】
また、特許文献2に開示されたナビゲーション装置では、予め地図データの情報として保持されている立体交差点について案内されるが、地図データに立体交差点の情報が存在しない分岐点や交差点については、ユーザは、経路探索により探索された経路がどちらの道路にあり、その道路にどのように進めばよいのかの判断に迷い、誤認識や誤走行することがある。
【0007】
この発明は、上述した問題を解決するためになされたものであり、狭Y字の分岐点などといった地点でユーザが誤認識や誤走行することを防止できるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るナビゲーション装置は、地図情報を取得する地図情報取得手段と、位置および方位を検出する位置方位検出手段と、目的地を入力する入力手段と、位置方位検出手段で検出された位置から入力手段によって入力された目的地までの最適経路を地図情報取得手段によって取得された地図情報に基づき計算する経路探索手段と、経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段と、位置方位検出手段によって検出された位置が特徴点から所定距離以内になったときに、勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段と、経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段とを備えている。
【発明の効果】
【0009】
この発明によれば、最適経路上において所定の条件を満たす特徴点、例えば狭Y字の分岐点といったユーザが誤認識や誤走行するおそれの地点において道路の勾配に関する勾配案内の要否を判定し、特徴点から所定距離以内になったときに、特徴点における勾配案内が必要であれば案内データを生成し、この案内データに基づき案内メッセージを出力するように構成したので、特徴点におけるユーザの誤認識や誤走行を防止できる。
【発明を実施するための最良の形態】
【0010】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
図1は、この発明の実施の形態1に係るナビゲーション装置の機能的な構成を示すブロック図である。このナビゲーション装置は、地図情報取得手段1、位置方位検出手段2、入力手段3、経路探索手段4、経路誘導手段5、出力手段6および勾配案内判定手段7から構成されている。
【0011】
地図情報取得手段1は、地図情報としての地図データを取得する。この地図情報取得手段で取得された地図データは、位置方位検出手段2、経路探索手段4および勾配案内判定手段7に送られる。位置方位検出手段2は、地図情報取得手段1から送られてくる地図データに基づいて、車両の位置および方位を検出する。この位置方位検出手段2で検出された位置および方位を表す位置方位データは、経路探索手段4および経路誘導手段5に送られる。
【0012】
入力手段3は、目的地、勾配角度範囲(詳細は後述する)といった種々の設定情報を入力するために使用される。この入力手段3で入力された情報は、経路探索手段4および勾配案内判定手段7に送られる。経路探索手段4は、位置方位検出手段2で検出された位置から、入力手段3によって入力された目的地までの最適経路を、地図情報取得手段1から送られてくる地図データに基づいて計算する。この経路探索手段4で計算された最適経路を表す経路データは、経路誘導手段5に送られる。
【0013】
経路誘導手段5は、経路探索手段4から送られてくる経路データと、位置方位検出手段2から送られてくる位置方位データにしたがって特徴点を検出し、この検出した特徴点における案内データを、勾配案内判定手段7からの判定結果に応じて作成する。この経路誘導手段5で作成された案内データは、出力手段6に送られる。なお、この明細書では、特徴点とは、ユーザが誤認識や誤走行する可能性が高いと判断される最適経路上の地点をいう。
【0014】
出力手段6は、経路誘導手段5から送られてくる案内データにしたがって、案内メッセージを表示し、または音声として出力する。勾配案内判定手段7は、特徴点に接続される複数の道路の勾配の相関から勾配案内を行うべきか否かを判定する。この勾配案内判定手段7による判定結果は、経路誘導手段5に送られる。
【0015】
次に、図1に示した各機能を実現するためのナビゲーション装置のハードウェア構成を、図2に示すブロック図を参照しながら説明する。
【0016】
ナビゲーション装置は、メディア201、ドライブ202、GPS(Global Positioning System)受信機203、ジャイロ204、車速信号取得部205、操作部206、インタフェース回路207、ナビECU(Electronic Control Unit ;電子制御装置)208、メモリ209、ディスプレイ210およびスピーカ211から構成されている。
【0017】
メディア201は、例えばDVD(Digital Versatile Disk)やハードディスク(Hard disk)といった記憶媒体から構成されている。このメディア201に記憶されている地図データは、ドライブ202によって読み出される。ドライブ202は、メディア201に記憶されている地図データを読み出し、インタフェース回路207を介してナビECU208に送る。上述した地図情報取得手段1は、主としてメディア201およびドライブ202から構成されている。
【0018】
GPS受信機203は、自己の絶対位置や絶対方位を検出する。このGPS受信機203で検出された絶対位置および絶対方位は、位置方位データとして、インタフェース回路207を介してナビECU208に送られる。ジャイロ204は、車両の旋回時の角速度を検出する。このジャイロ204で検出された角速度は、角速度データとして、インタフェース回路207を介してナビECU208に送られる。
【0019】
車速信号取得部205は、図示しない車両から所定走行距離毎に送られてくる車速信号(車速パルス)を取得する。この車速信号取得部205で取得された車速信号は、速度データとして、インタフェース回路207を介してナビECU208に送られる。上述した位置方位検出手段2は、主としてGPS受信機203、ジャイロ204および車速信号取得部205から構成されている。
【0020】
操作部206は、ユーザ操作の入力を受付けるためのボタンやタッチパネルなどから構成されている。この操作部206から入力された情報は、操作データとして、インタフェース回路207を介してナビECU208に送られる。上述した入力手段3は、主として操作部206から構成されている。
【0021】
インタフェース回路207は、ナビECU208からの制御信号にしたがって、ドライブ202から読み出した地図データ、GPS受信機203から送られてきた位置方位データ、ジャイロ204から送られてくる角速度データ、車速信号取得部205から送られてくる角速度データおよび操作部206から送られてくる操作データをナビECU208に送るための制御を行う。
【0022】
ナビECU208は、インタフェース回路207から送られてくる地図データ、位置方位データ、角速度データ、車速データおよび操作データをメモリ209に書き込むとともに、これらのデータをメモリ209から読み出し、この読み出したデータを用いて各種処理を実行する。上述した経路探索手段4、経路誘導手段5および勾配案内判定手段7は、主としてナビECU208およびメモリ209から構成されている。
【0023】
ディスプレイ210は、例えば液晶ディスプレイから構成されており、ナビECU208から送られてくるデータにしたがって、地図、最適経路、自車マーク、案内メッセージなどを表示する。スピーカ211は、ナビECU208から送られてくるデータにしたがって、案内メッセージを音声で出力する。上述した出力手段6は、主としてディスプレイ210およびスピーカ211から構成されている。
【0024】
次に、この実施の形態1に係るナビゲーション装置で使用される地図データのうち、この発明に特徴的な部分について説明する。図3は、地図データに含まれる道路リンクまたはノードに対応付けて予め格納される勾配情報のフォーマットを示す。道路を構成する道路リンクA(またはノードA)に対応させて、勾配方向、勾配角度および標高から成る勾配情報が格納されている。勾配方向は、「上り」、「下り」および「平坦」といった勾配の方向を示す。勾配角度は、別途規定されている道路の方向に対して、例えば+10度や−10度といった傾斜があることを示す。標高は、+50mや−50mといった道路の標高値を示す。
【0025】
なお、標高値が地図データに含まれている場合は、接続前道路リンク(またはノード)の標高値と当該道路リンク(またはノード)の標高値との差を、リンク長(またはノード間距離)で除算し、三角関数より+10度や−10度といった勾配角度を求めるように構成できる。また、+5度〜−5度の勾配角度範囲を平坦とみなし、+10度を越える、または−10度を下回る勾配角度範囲を急傾斜とみなす、といった勾配角度範囲が、予め入力手段3を用いて設定されているものとする。
【0026】
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーション装置の動作を説明する。なお、以下では、経路探索手段4において最適経路(以下、単に「経路」という)が計算されて、その計算結果が経路探索手段4の内部に保存されているものとする。
【0027】
まず、この発明の実施の形態1に係るナビゲーション装置の概略の動作を、図4に示すフローチャートを参照しながら説明する。まず、経路上の特徴点を抽出する特徴点抽出処理が実行される(ステップST1)。すなわち、ユーザが誤認識や誤走行する可能性が高い地点が特徴点として抽出される。この特徴点抽出処理の詳細は後述する。
【0028】
次いで、勾配案内判定処理が実行される(ステップST2)。すなわち、ステップST1において抽出された特徴点に接続される各道路の勾配の相関から、勾配案内を行うべきか否かが判定される。この勾配案内判定処理の詳細は後述する。次いで、案内メッセージ出力処理が行われる(ステップST3)。すなわち、既存の案内メッセージに勾配案内が組み合わせられて出力される。この案内メッセージ出力処理の詳細は後述する。
【0029】
次に、図4のステップST1で実行される特徴点抽出処理の詳細を、図5に示すフローチャートを参照しながら説明する。この特徴点抽出処理は、経路誘導手段5によって行われる。
【0030】
特徴点抽出処理では、まず、現在位置から所定距離以内にノードが存在するかどうかが調べられる(ステップST11)。すなわち、経路誘導手段5は、位置方位検出手段2で検出された位置から所定距離以内に、経路探索手段4から送られてくる経路データによって示される経路上のノードが存在するかどうかを調べる。このステップST11において、ノードが存在しないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0031】
一方、上記ステップST11において、ノードが存在することが判断されると、次いで、そのノードは交差点であるかどうかが調べられる(ステップST12)。これは、そのノードに対応する地図データを調べることにより行われる。このステップST12において交差点であることが判断されると、次いで、その交差点は案内点、つまり案内メッセージを出力すべき地点であるかどうかが調べられる(ステップST13)。交差点が案内点であるかどうかの情報は、予め地図データに格納されている。このステップST13において、その交差点が案内点でないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0032】
上記ステップST13において、交差点が案内点であることが判断されると、次いで、経路上の流出道路(交差点から出る道路)と流入道路(交差点に入る道路)との方位差が所定値より小さいかどうかが調べられる(ステップST14)。例えば、図6(a)に黒丸印で示すような交差点では、経路上の流出道路と流入道路との方位差が所定値より小さいと判断される。このステップST14において、方位差が所定値より小さいことが判断されると、シーケンスはステップST19に進み、その交差点(案内点)は、ユーザが誤認識や誤走行する可能性が高いと判断され、特徴点として抽出される。
【0033】
一方、ステップST14において、方位差が所定値より小さくないことが判断されると、次いで、経路上の流出道路に対して方位差が小さい他の流出道路が存在するかどうかが調べられる(ステップST15)。例えば、図6(b)に黒丸印で示すような交差点では、経路上の流出道路に対して方位差が所定値より小さい他の流出道路があると判断される。このステップST15において、方位差が所定値より小さい他の流出道路があると判断されると、シーケンスはステップST19に進み、その交差点(案内点)が特徴点として抽出される。
【0034】
一方、上記ステップST15において、方位差が所定値より小さい他の流出道路がないことが判断されると、次いで、流出道路の数が所定値より多いかどうかが調べられる(ステップST16)。例えば、図6(c)に黒丸印で示すような交差点では、流出道路の数が所定値より多いと判断される。このステップST16において、流出道路の数が所定値より多いことが判断されると、シーケンスはステップST19に進み、その交差点(案内点)が特徴点として抽出される。一方、ステップST16において、流出道路の数が所定値より多くないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0035】
上記ステップST12において、ノードが交差点でないことが判断されると、補間点である旨が認識され、補間点の前後の道路リンクで勾配差があるかどうかが調べられる(ステップST17)。これは、その補間点(ノード)の勾配情報に含まれる勾配角度の差を調べることにより行われる。このステップST17において、勾配差がないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。
【0036】
一方、ステップST17において、勾配差があることが判断されると、その道路は複数レーンであるかどうかが調べられる(ステップST18)。このステップST18において、複数レーンでないことが判断されると、特徴点が抽出されることなく特徴点抽出処理は終了する。一方、ステップST18において、複数レーンであることが判断されると、シーケンスはステップST19に進み、そのノード(補間点)が特徴点であると判断される。すなわち、交差点ではない一本道の道路において勾配の変化がある地点が特徴点として抽出される。その後、特徴点抽出処理は終了する。
【0037】
次に、図4のステップST2で実行される勾配案内判定処理の詳細を、図7に示すフローチャートを参照しながら説明する。この勾配案内判定処理は、勾配案内判定手段7によって実行される。なお、この勾配案内判定処理は、上述した特徴点抽出処理において特徴点が抽出された場合にのみ実行される。
【0038】
勾配案内判定処理では、まず、上述した特徴点抽出処理において抽出された特徴点に接続される各道路の勾配情報が取り出され、「上り」、「下り」および「平坦」の3種類に分類される(ステップST21)。次いで、特徴点が交差点であるかどうかが調べられる(ステップST22)。このステップST22において、特徴点が交差点であることが判断されると、次いで、特徴点に接続される複数の道路に対応付けられた勾配情報によって表される勾配の相関が調べられる(ステップST23〜ST25)。具体的には、まず、経路上の流出道路の勾配に一致する勾配を有する道路(流入道路を含む)があるかどうかが調べられる(ステップST23)。
【0039】
このステップST23において、経路上の流出道路の勾配に一致する勾配を有する道路がないことが判断されると、経路上の流出道路の勾配方向を案内すると判定される(ステップST30)。この場合、後に実行される案内メッセージ出力処理においては、例えば図8(b)に示すような狭Y字分岐の交差点において、経路上の流出道路の勾配方向が「上り」であれば「上る道路へおすすみください」という音声案内がなされ、「下り」であれば「下る道路へおすすみください」、「平坦」であれば「平坦道路へおすすみください」という音声案内がなされる。
【0040】
なお、例えば、経路上の流出道路の勾配方向が「上り」である場合は、経路上の流出道路以外の道路が全て平坦な道路であれば、「上る道路へおすすみください」という音声案内のかわりに「平坦でない道路へおすすみください」と音声案内するように構成することができる。また、経路上の流出道路が平坦で、他の道路が全て平坦ではない道路であれば、「上る道路へおすすみください」という音声案内のかわりに「平坦な道路へおすすみください」と音声案内するように構成することもできる。その後、シーケンスはステップST28に進む。
【0041】
上記のステップST23において、経路上の流出道路の勾配に一致する勾配を有する道路があることが判断されると、その経路上の流出道路の勾配に一致する勾配を有する道路(流入道路を含む)と経路上の流出道路との方位差が所定値より小さいかどうかが調べられる(ステップST24)。このステップST24において、方位差が所定値より小さくないことが判断されると、シーケンスはステップST30へ進み、上述したように、経路上の流出道路の勾配方向を案内すると判定される。
【0042】
一方、ステップST24において、方位差が所定値より小さいことが判断されると、次いで、経路上の流出道路の勾配に一致する勾配を有し、且つ方位差が所定値より小さい道路が流入道路であるかどうかが調べられる(ステップST25)。このステップST25において、流入道路でないことが判断されると、経路上の流出道路の勾配方向を案内しないと判定される(ステップST27)。この場合、後に実行される案内メッセージ出力処理において、音声案内は行われない。その後、シーケンスはステップST28に進む。
【0043】
上記ステップST25において、流入道路であることが判断されると、ユーザが誤認識や誤走行するおそれがある交差点であることが認識され、経路上の流出道路が流入道路と同じ勾配方向である旨を付加した勾配方向を案内すると判定される(ステップST26)。この場合、後に実行される案内メッセージ出力処理において、例えば、図8(a)および図8(c)に示すように、経路上の流出道路の勾配方向が「上り」であれば「このまま上る道路へおすすみください」という音声案内がなされる。ここで言う「流入道路と同じ勾配方向である旨」とは、音声案内の「このまま」に該当する。その後、シーケンスはステップST28に進む。
【0044】
上記ステップST22において、特徴点が交差点でないことが判断されると、当該特徴点は補間点である旨が認識され、次いで、当該ナビゲーション装置を搭載している車両が大型車種であって、且つ、経路上の流出道路の勾配方向は平坦であるかどうかが調べられる(ステップST29)。なお、大型車種であるかどうかを表す車種情報は、予め入力手段3から入力され、勾配案内判定手段7の内部、具体的にはメモリ209に記憶されているものとする。このステップST29において、大型車種であって、且つ、経路上の流出道路の勾配方向は平坦であることが判断されると、勾配案内の判定が行われることなく勾配案内判定処理は終了する。
【0045】
一方、ステップST29において、大型車種であって、且つ、経路上の流出道路の勾配方向は平坦でないことが判断されると、シーケンスはステップST30に進み、経路上の流出道路の勾配方向を案内すると判定される。この場合、特徴点が交差点でないので、後に実行される案内メッセージ出力処理においては、例えば、経路上の流出道路の勾配方向が「上り」であれば「左側車線、登坂車線を走行してください」という音声案内がなされる。その後、シーケンスはステップST28に進む。
【0046】
ステップST28では、特徴点の勾配角度に応じて勾配案内の要否が判定される。具体的には、経路上の流出道路が急な上りまたは下りの勾配であれば、予防安全案内を行うと判定される。この場合、後に実行される案内メッセージ出力処理において、例えば、経路上の流出道路が急な下りの勾配であれば、「急な下り坂です。気をつけてください」という音声案内が出力される。なお、この場合の音声案内は、車両の移動速度を考慮して出力するように構成できる。例えば、勾配案内判定手段7は、車速信号取得部205から速度データを取得し、この速度データが所定の速度以上を示している場合に、上記音声案内を出力するように構成できる。
【0047】
なお、特徴点が交差点でない場合は案内図は表示されないので、例えば、「左側車線、登坂車線を走行してください」および「急な下り坂です。気をつけてください」という音声案内をスピーカ211から出力するとともに、これらの内容を表すテロップをディスプレイ210に表示するように構成することもできる。
【0048】
次に、図4のステップST3で実行される案内メッセージ出力処理の詳細を、図9に示すフローチャートを参照しながら説明する。この案内メッセージ出力処理は、経路誘導手段5によって実行される。
【0049】
案内メッセージ出力処理では、まず、特徴点が交差点であれば、案内図の勾配表現が行われる(ステップST31)。図10は、道路や経路について勾配差を表す勾配表現を行った案内図の例を示す図である。図10(a)は、3D案内図に陰影または鳥瞰図といった勾配差を表す道路勾配表現を行った例を示している。また、図10(b)は、2D案内図に勾配差を表す道路勾配陰影表現を行った例を示している。さらに、図10(c)は、ビットマップ案内図に経路の陰影または鳥瞰図といった勾配差を表す勾配表現を行った例を示している。このようにして生成された案内情報が出力手段6に送られ、ディスプレイ210に案内メッセージが表示される。
【0050】
道路や経路の勾配表現は、地図データに予め登録されているビットマップ等の画像データを用いて行うことができる。また、道路や経路の勾配表現は、プログラムで演算し、または保持しているポリゴン等の領域を描画することにより行うこともできる。
【0051】
次いで、音声案内の編集が行われる(ステップST32)。すなわち、所定の優先順位に従って、既存の音声案内に、勾配差を表す勾配方向の音声案内を付加する処理が行われる。この処理によって生成された案内情報が出力手段6に送られ、スピーカ211から音声案内のメッセージが出力される。
【0052】
所定の優先順位は、例えば以下のように決定することができる。以下に示す例では、括弧内の数字が小さいものが優先順位が高い案内項目である。なお、各案内項目の右側には、音声案内の例を示している。
(1)右左折の案内:「(まもなく)左方向です」
(2)その先の交差点の案内(連続交差点案内):「(その先)左方向です」
(3)カーブ案内:「(この先)右方向にカーブします」
(4)勾配道路案内:「上る道路へおすすみください」
(5)目印案内:「××ストアが目印です」
(6)交差点名称案内:「三輪交差点を」
(7)地先名称案内:「横浜方面へ」
(8)道なり案内:「(この先)道なりです」
(9)合流案内:「(この先)左からの合流があります」
(10)踏み切り案内:「(この先)踏み切りです」
(11)交通情報案内:「(この先)渋滞があります」
【0053】
上述した優先順位に従って、既存の音声案内に勾配方向の音声案内を付加して編集した音声案内の例を以下に示す。なお、車両が移動中にユーザが認識できる案内の情報は限られるので、別途の設定によりユーザに提供する情報の量が制限されている。
【0054】
例えば、既存の「まもなく、ななめ左方向です。」という音声案内に対し、「このまま上る道路へおすすみください」という勾配方向の音声案内が付加されて、「まもなく、ななめ左方向です。このまま上る道路へおすすみください」といった音声案内が作成される。
【0055】
また、既存の「まもなく、横浜方面へ左方向です。この先、右方向にカーブします。××ストアが目印です。」という音声案内に対し、「上る道路へおすすみください」という勾配方向の音声案内が付加されて、「まもなく、左方向です。この先、右方向にカーブして上る道路へおすすみください。」といった音声案内が作成される。この場合、「横浜方面へ」や「××ストアが目印です」という案内は優先順位が低いので、これらを削除して所定の情報量に納める編集が行われて音声案内が作成される。
【0056】
なお、上述したステップST31における案内図の表示においては、音声案内の案内項目のうち所定の優先順位に該当する案内項目のみ強調して表示するように構成することもできる。
【0057】
以上説明したように、この発明の実施の形態1に係るナビゲーション装置によれば、狭Y字分岐などユーザが誤認識や誤走行をするおそれのある地点に対して、道路および経路の勾配を図示した案内図を表示し、また、既存の音声案内に道路の勾配についての音声案内を組み合わせて所定の優先順位で音声案内するように構成したので、案内地点でユーザが誤認識また誤走行することを防止できる。
【0058】
具体的には、例えば「上る道路へおすすみください」、「平坦な道路へおすすみください」、「平坦ではない道路へおすすみください」といった音声案内と道路勾配を表現した交差点の案内図の表示が行われ、また、トラック等の大型車種では「左側車線、登坂車線を走行してください」とレーン案内が行われるので、ユーザの誤認識または誤走行を防止できる。また、傾斜が急な道路においては「急な下り坂があります」や「急な上り坂があります」といった予防安全案内を行うことができる。
【図面の簡単な説明】
【0059】
【図1】この発明の実施の形態1に係るナビゲーション装置の機能的な構成を示すブロック図である。
【図2】図1に示した各機能を実現するためのナビゲーション装置のハードウェア構成を示すブロック図である。
【図3】この発明の実施の形態1に係るナビゲーション装置で使用される地図データの道路リンクまたはノードに予め格納される勾配情報のフォーマットを示す図である。
【図4】この発明の実施の形態1に係るナビゲーション装置の概略の動作を示すフローチャートである。
【図5】図4に示す特徴点抽出処理の詳細を示すフローチャートである。
【図6】図4に示す特徴点抽出処理を説明するための図である。
【図7】図4に示す勾配案内判定処理の詳細を示すフローチャートである。
【図8】図4に示す勾配案内判定処理を説明するための図である。
【図9】図4に示す案内メッセージ出力処理の詳細を示すフローチャートである。
【図10】図4に示す案内メッセージ出力処理を説明するための図である。
【符号の説明】
【0060】
1 地図情報取得手段、2 位置方位検出手段、3 入力手段、4 経路探索手段、5 経路誘導手段、6 出力手段、7 勾配案内判定手段、201 メディア、202 ドライブ、203 GPS受信機、204 ジャイロ、205 車速信号取得部、206 操作部、207 インタフェース回路、208 ナビECU、209 メモリ、210 ディスプレイ、211 スピーカ。
【特許請求の範囲】
【請求項1】
地図情報を取得する地図情報取得手段と、
位置および方位を検出する位置方位検出手段と、
目的地を入力する入力手段と、
前記位置方位検出手段で検出された位置から前記入力手段によって入力された目的地までの最適経路を前記地図情報取得手段によって取得された地図情報に基づき計算する経路探索手段と、
前記経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段と、
前記位置方位検出手段によって検出された位置が前記特徴点から所定距離以内になったときに、前記勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段と、
前記経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段
とを備えたナビゲーション装置。
【請求項2】
地図情報取得手段で取得される地図情報は、道路の勾配を表す勾配情報を含み、
勾配案内判定手段は、特徴点に接続される複数の道路に対応付けられた勾配情報によって表される勾配の相関から勾配案内の要否を判断する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
経路誘導手段は、既存の案内に勾配案内を組み合わせた案内データを生成する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項4】
既存の案内および勾配案内は所定の優先順位を有し、
経路誘導手段は、既存の案内に勾配案内を組み合わせる際に、前記優先順位に従って選択された既存の案内および勾配案内を組み合わせて案内データを生成する
ことを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
勾配案内判定手段は、経路探索手段で計算された最適経路上における特徴点として狭Y字分岐の交差点における道路の勾配に関する勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項6】
経路誘導手段は、案内メッセージとして道路または経路の勾配差を表す情報を出力手段に送って案内図を表示させる
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項7】
経路誘導手段は、案内メッセージとして道路または経路の勾配差を表す情報を出力手段に送って音声で出力させる
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項8】
勾配案内判定手段は、車両の種類を表す車種情報に応じて勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項9】
勾配案内判定手段は、特徴点の勾配角度に応じて勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項1】
地図情報を取得する地図情報取得手段と、
位置および方位を検出する位置方位検出手段と、
目的地を入力する入力手段と、
前記位置方位検出手段で検出された位置から前記入力手段によって入力された目的地までの最適経路を前記地図情報取得手段によって取得された地図情報に基づき計算する経路探索手段と、
前記経路探索手段で計算された最適経路上において所定の条件を満たす特徴点における道路の勾配に関する勾配案内の要否を判定する勾配案内判定手段と、
前記位置方位検出手段によって検出された位置が前記特徴点から所定距離以内になったときに、前記勾配案内判定手段によって勾配案内が必要であることが判定されると案内データを生成する経路誘導手段と、
前記経路誘導手段によって生成された案内データに基づき案内メッセージを出力する出力手段
とを備えたナビゲーション装置。
【請求項2】
地図情報取得手段で取得される地図情報は、道路の勾配を表す勾配情報を含み、
勾配案内判定手段は、特徴点に接続される複数の道路に対応付けられた勾配情報によって表される勾配の相関から勾配案内の要否を判断する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
経路誘導手段は、既存の案内に勾配案内を組み合わせた案内データを生成する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項4】
既存の案内および勾配案内は所定の優先順位を有し、
経路誘導手段は、既存の案内に勾配案内を組み合わせる際に、前記優先順位に従って選択された既存の案内および勾配案内を組み合わせて案内データを生成する
ことを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
勾配案内判定手段は、経路探索手段で計算された最適経路上における特徴点として狭Y字分岐の交差点における道路の勾配に関する勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項6】
経路誘導手段は、案内メッセージとして道路または経路の勾配差を表す情報を出力手段に送って案内図を表示させる
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項7】
経路誘導手段は、案内メッセージとして道路または経路の勾配差を表す情報を出力手段に送って音声で出力させる
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項8】
勾配案内判定手段は、車両の種類を表す車種情報に応じて勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【請求項9】
勾配案内判定手段は、特徴点の勾配角度に応じて勾配案内の要否を判定する
ことを特徴とする請求項1記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−120980(P2007−120980A)
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願番号】特願2005−310133(P2005−310133)
【出願日】平成17年10月25日(2005.10.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年5月17日(2007.5.17)
【国際特許分類】
【出願日】平成17年10月25日(2005.10.25)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]