
ナビゲーション装置
【課題】道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できるようにする。
【解決手段】自車の周辺に関する周辺情報を受信し、自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する。入力された一又は複数の撮影画像を解析することにより、一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する。受信した周辺情報と、一又は複数の撮影画像の解析の結果とに基づいて、判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する。目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、目標オブジェクトを強調表示する。
【解決手段】自車の周辺に関する周辺情報を受信し、自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する。入力された一又は複数の撮影画像を解析することにより、一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する。受信した周辺情報と、一又は複数の撮影画像の解析の結果とに基づいて、判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する。目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、目標オブジェクトを強調表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載することができるナビゲーション装置に関する。
【背景技術】
【0002】
GPS(Global Positioning System)衛星から受信した位置情報を用いて、現在位置や速度を計算できる、車両用のナビゲーション装置が普及してきている。ナビゲーション装置は、一般に、電子化された地図上に、現在の自車位置を表示する機能を持っている。さらに、ナビゲーション装置は、ユーザが入力した目的地までの複数の経路を探索して提示する探索機能や、提示された複数の経路からユーザ所望の経路が選択された場合には、その経路に基づいて進路方向を案内する誘導機能も持っている。
【0003】
特に、最近のナビゲーション装置では、推奨の経路を走行中に、案内を行う地点に接近すると、3次元アニメーションを用いて交差点や高架などの道路構造の拡大図を表示するものや、地図上で周辺に存在する施設を表示し、その施設の場所を目印として誘導するものもある。
【0004】
しかし、上記のような3次元アニメーションは、実際に運転者が見ている風景とは異なることが多く、進行すべき方向を認識しづらいことがある。また、電子地図上のデータが更新されない場合には、実際の周辺施設に関する情報が変化している可能性があり、実際には存在しない施設を目印として案内したりしてしまうこともある。さらに、案内地点の周辺に目印となる建造物が存在しない場合、目印を利用した誘導案内ができないということもある。
【0005】
特許文献1には、撮影された実写画像における道路情報を検知し、案内地点の情報と道路情報が一致する場合に、実写画像と案内画像を重ね合わせて表示する方法が記載されている。
【0006】
特許文献2には、他の車両から車車間通信によって受信した、位置や方向、特徴情報といった他車情報を用いて、自車の進行方向を他車情報に関連付けて案内をすることが記載されている。
【0007】
【特許文献1】特開2005−214857号公報
【特許文献2】特開2005−207999号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1の技術では、自車の周囲に他の車両が走行している場合には、実写画像から常に安定して道路情報を検知することは難しい。
【0009】
また、上記特許文献2では、位置情報と走行方向の情報の他、他車の特徴情報として車種や車両カテゴリ、車色等を受信し、それらの情報に関連付けて目標となる車両を報知するが、類似した車両が周辺に複数存在する場合は、目標とする車両の特定が困難である。
【0010】
本発明は、これらの問題点を解決するために考案されたものであり、道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できるようにすることを目的とする。
【0011】
本発明の他の目的は、後の説明から明らかになるであろう。
【課題を解決するための手段】
【0012】
本発明に従うナビゲーション装置は、自車の周辺に関する周辺情報を受信する通信手段と、自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する撮影画像入力手段と、前記入力された一又は複数の撮影画像を解析することにより、前記一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する画像処理手段と、前記受信した周辺情報と、前記一又は複数の撮影画像の解析の結果とに基づいて、前記判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する目標オブジェクト判断手段と、前記目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、前記目標オブジェクトを強調表示する表示手段とを備える。
【発明の効果】
【0013】
本発明のナビゲーション装置によれば、道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して、本発明の一実施形態について説明する。
【0015】
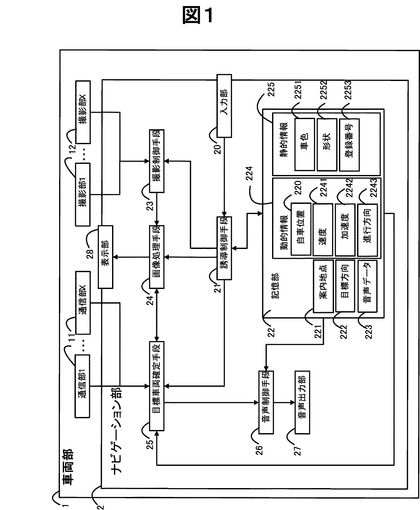
図1は、本発明の一実施形態に係る車両部及びナビゲーション装置の構成例を示す。
【0016】
車両部1は、ナビゲーション部2を設置する車両を指す。通信部11及び撮影部12のうちの少なくとも一つを、車両部1或いはナビゲーション部2に搭載することができる。
【0017】
通信部11は、車両部1と別の物体(例えば車両部或いは建物)に搭載されている別の通信部と通信を行うことができる装置である。通信部11は、一又は複数台搭載することができる。搭載する台数は、例えば、通信相手の数や通信プロトコルに基づいて決めることができる。
【0018】
撮影部12は、車両部1の周辺を撮影する撮影装置(例えばデジタルビデオカメラ)である。撮影部12は、一又は複数台搭載することができる。搭載する台数は、例えば、撮影方向や撮影範囲に基づいて決めることができる。
【0019】
ナビゲーション部2は、入力部20、誘導制御手段21、記憶部22、撮影制御手段23、画像処理手段24、目標車両確定手段25、音声制御手段26、音声出力部27、及び表示部28を備える。これらの構成要素のうち、音声制御手段26及び音声出力部27は無くても良い。各部や各手段は、ハードウェア(例えば回路)、コンピュータプログラム、或いはそれらの組み合わせ(例えば、コンピュータプログラムを読み込んで実行する一又は複数のCPU)によって実現することもできる。各コンピュータプログラムは、コンピュータマシンに備えられる記憶資源(例えばメモリ)から読み込むことができる。その記憶資源には、CD−ROMやDVD(Digital Versatile Disk)等の記録媒体を介してインストールすることもできるし、インターネットやLAN等の通信ネットワークを介してダウンロードすることもできる。
【0020】
入力部20は、ナビゲーション部2のユーザが目的地を設定したり、経路を設定したりするための入力装置である。
【0021】
誘導制御手段21は、誘導の制御に関する処理を実行する。例えば、誘導制御手段21は、ユーザが選択した経路に関して、案内地点221及び目標方向222を算出し、案内情報を作成する。また、例えば、誘導制御手段21は、車両部1の走行中に、記憶部22の自車位置220のデータを読み出し、案内地点221に接近したかどうかを判断する。車両部1が案内地点222に接近したと判断した場合、誘導制御手段1は、撮影制御手段23に対して実写映像を画像処理手段24に転送するよう命令する。また、例えば、誘導制御手段1は、目標方向222を画像処理手段24に渡し、実写画像に合成するよう命令する。さらに、誘導制御手段1は、例えば、目標方向222を目標車両確定手段25に渡し、案内表示時に目印となるかどうか判断を依頼する。
【0022】
記憶部22は、ハードディスク或いはDVD(Digital Versatile Disk)などの記憶装置である。記憶部22には、電子的な情報が記憶される。具体的には、記憶部22は、自車位置220、案内地点221及び目標方向222を記憶することができる。また、記憶部22は、音声データ223を案内地点221や目標方向222に関連させて記憶することもできる。自車情報のうち動的に変化する情報(動的情報)224として、記憶部22は、上記の自車位置220の他、現在の自車速度2241、加速度2242、進行方向2243を記憶することもできる。さらに、自車情報のうち静的な情報(静的情報)225として、記憶部22は、自車の色2251、形状2252、自動車登録番号2253を記憶することもできる。
【0023】
自車位置220は、GPS(Global Positioning System)衛星から取得した現在位置の情報や、初期設定に基づいた位置に対して、3次元ジャイロ、車速の情報等で差分を反映させた位置情報を含んだものとすることができる。案内地点221は、入力部20によって目的地と自車位置220とを結ぶ経路において案内が必要な地点の集合とすることができる。目標方向222は、案内地点221と組み合わせて記憶させることができる(例えば、案内地点221が交差点の場合は、交差点に進入する道路に対して、脱出する道路の相対的な角度であるとすることができる)。音声データ223は、案内地点221に固有の地点名や、目標方向222に対応した角度に関する音声データや、案内情報を構成する音声データの部分全般を含めることができる。
【0024】
撮影制御手段23は、誘導制御手段21の要求に基づいて、撮影部12における撮影の開始や終了などの制御を行い、さらに、撮影映像を画像処理手段24に転送することができる。
【0025】
画像処理手段24は、撮影制御手段23から受け取った実写映像に基づいて、種々の処理、例えば、目標車両の抽出及び強調表示処理、案内情報の合成処理、実写案内表示転送処理を実行することができる。目標車両の抽出及び強調表示処理では、目標車両確定手段25から受け取る目標車両に関する情報を用いて、実写映像からその目標車両を特定することが行われる。案内情報の合成処理では、目標方向222に対応する画像を、前記実写映像に重ね合わせることが行われる。実写案内表示転送処理では、強調表示された車両を含む実写画像と、案内表示を重ね合わせた実写案内映像を表示部28に転送し、表示させることが行われる。
【0026】
目標車両確定手段25は、通信部11が受信した他車情報もしくは、画像処理手段24から転送される実写映像の少なくともどちらかと、記憶部22に格納している動的情報224、静的情報225、目標方向222の少なくともいずれかと、を比較し、実写映像から目標車両群を抽出する。ここで、目標車両確定手段25は、通信部11から受信した他車情報が無く、実写映像のみしか利用できない場合は、実写映像から他車情報を抽出し、記憶部22に格納している動的情報224、静的情報225、目標方向222の少なくともいずれかと、を比較し、実写映像から目標車両群を抽出することができる。そして、目標車両確定手段25は、目標車両群を抽出した後は、その中から自車(車両部1)により近い車両を特定し、案内を行う際の目標車両を確定することができる。その後、目標車両確定手段25は、画像処理手段24に対して、目標車両の強調表示、および目標方向222に対応する画像データの合成を依頼することができる。また、目標車両確定手段25は、音声制御手段26に案内音声を出力するよう依頼することができる。
【0027】
音声制御手段26は、目標車両確定手段26から受け取った目標車両の情報、必要ならば音声データ223を合成し、音声出力部27で案内音声を出力する。
【0028】
音声出力部27は、案内音声等を出力するための設置されるスピーカ、もしくはイヤホン等のデバイスである。音声出力部27は、音声制御手段27からの案内音声を出力する。
【0029】
表示部28は、ユーザに対して、目的地の選択、探索経路の表示、実写映像の表示、実写案内の表示を行うための、例えば液晶ディスプレイのようなデバイスである。表示部28は、画像処理手段24から転送されて来た画像を表示することができる。
【0030】
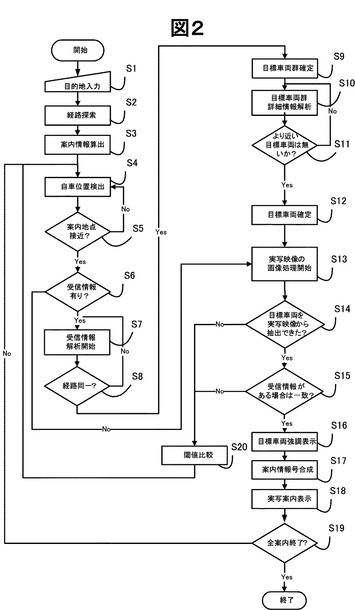
図2は、本実施形態で実写案内表示を行うための処理の流れの一例を示す。
【0031】
ステップS1では、ユーザが、入力部20を用いて、目的地を入力する。
【0032】
S2では、誘導制御手段21が、自車位置220(例えばGPS衛星からの信号を基に把握された現在位置)とユーザから入力された目的地とを結ぶ経路を探索し(例えば図示しない電子的な地図を用いて探索し)、探索された一又は複数の経路を、画像処理手段24に送信し、画像処理手段24により、表示部28に表示させる。
【0033】
S3では、誘導制御手段21が、ユーザから経路の選択を入力部20を介して受けた場合、選択された経路に関して、案内地点221と目標方向222のセットの集合を算出する。S4では、誘導制御手段21は、自車(車両部1)の現在位置をGPS衛星からの信号に基づいて検出する。
【0034】
S5では、誘導制御手段21が、検出された自車位置がS3で算出した案内地点221のどれかに接近したかどうかを判定する。接近していないと判定した場合は、S4に戻り、接近したと判定した場合は、誘導制御手段21は、その旨を目標車両確定手段27に通知する。
【0035】
S6では、目標車両確定手段27が、通信部11が周辺情報を受信しているかどうか検出する。周辺情報を受信している場合は、S7へ進み、受信していない場合は、S13へ進む。なお、周辺情報とは、例えば、自車周辺の他車、周辺道路、周辺施設等の少なくともいずれかに関する情報である。
【0036】
S7では、目標車両確定手段27が、受信した周辺情報の解析を開始する。なお、S5でYesの通信を開始してもよいし、もしくは、常時通信しておいて解析をこの時点で開始してもよい。
【0037】
S8では、目標車両確定手段27が、案内地点221に関して、受信した周辺情報のうち、送信元の他車の経路が自車の経路と同一であるか判定する。同一経路であった場合はS9に進み、同一経路でなかった場合は、他の車両について受信した周辺情報を解析するため、S7へ戻る。ただし、同一経路とは、同一方向に限定されず、目的地方向から自車と反対向きに走行してきた他車も、同一経路を走行していると見なしてもよい。
【0038】
S9では、目標車両確定手段27が、経路が同一である目標車両の集合を確定する。この集合を以降、目標車両群という。
【0039】
S10では、目標車両確定手段27が、目標車両群について、受信した経路以外の他車に関する情報(他車情報)を解析する。ここでいう他車情報とは、目標車両群の各々の位置情報、速度、加速度、進行方向、操舵角の少なくともいずれかであり、目標車両確定手段27が、これらと自車情報とを比較する。
【0040】
具体的には、例えば、目標車両は自車から近い車両が適しているため、目標車両確定手段27は、自車と目標車両群中の各々の位置情報を比較し、自車から所定範囲内に属する車両(つまり近傍の車両)を抽出する。さらに、目標車両確定手段27は、自車の進行方向および操舵角を基に、目標車両群中の各々の車両が自車の経路上にあるかどうかを判定する。この他、速度、加速度の情報を用いて目標車両に適するかどうかを判定することもできる。
【0041】
また、上記の他車情報のみでは目標車両の位置を特定できない場合には、目標車両確定手段27は、目標車両の撮影部が撮影した実写映像を受信し、自車情報を用いて、実写映像から自車を抽出し、自車と目標車両との位置関係を相対的に算出してもよい。この処理は、画像処理手段24と協働して行うことができる。ここでいう自車情報とは、自車に関する色、形状(例えばセダン、ワゴンなど)、自動車登録番号等である。
【0042】
このようにして、目標車両群のうちの一車両が自車と同一の経路上にあるか、もしくは自車の経路上に向かうことが予測できる場合は、目標車両確定手段27が、そのような他車を目標車両の一つの候補とし、S11へ進む。
【0043】
一方、すべての目標車両群の車両がこれらの条件を満たせない場合は、撮影部から取得した実写映像のうち、道路上もしくは道路脇のオブジェクト(例えば、情報、建造物、施設の少なくともいずれか)を用いて、自車周辺における静的な目標物体を決定してもよい。道路上の情報とは、例えば、標識や標示、車線をさす。また、道路上の建造物とは、車線、中央分離帯、横断歩道等を指す。また、道路脇の建造物とは、信号機、高架橋、陸橋、電信柱、ポスト等をさす。これらの静的目標物体を実写映像から抽出した上で、自車と静的目標物体との距離を認識した上で、案内地点の目印とし、これ以降、静的目標物体を目標車両の代替として使用してもよい。
【0044】
S11では、目標車両確定手段27が、他車の位置情報と自車位置220を比較する。目標車両群のうち、自車により近い目標車両がなくなれば、S12へ進み、現在解析中の目標車両群のうち、自車により近い他車がまだ存在する場合は、S10へ戻る。
【0045】
S12では、目標車両確定手段27が、目標車両群から目標車両を確定する。確定後はS13へ進む。基本的には、この目標車両を目印として案内を行う。確定した目標車両に関する情報が画像処理手段24に通知される。
【0046】
S13では、撮影部12で撮影された実写映像から、S12で確定した目標車両が抽出されたり、車両以外の周辺の情報が抽出されたりする。
【0047】
まず、目標車両の抽出について説明する。S6で受信した周辺情報が無かった場合には、目標車両確定手段27が、撮影された範囲の周辺車両について、車間距離、位置、車速、加速度、方向指示器の点滅状態、形状、自動車登録番号、操舵角、進行方向の少なくともいずれかの情報を実写映像から算出、もしくは抽出し、これらの情報を用いて、目標車両を確定する。例えば、自車と同一経路が案内地点において右折である場合、右側の方向指示器の点滅や操舵角と連動するタイヤの向きを検知し、上記算出、抽出した情報、例えば位置や形状等を用いて目標車両を特定する。
【0048】
一方、S6で受信した周辺情報がある場合には、目標車両確定手段27が、既に受信してある目標車両の位置、速度等の情報を用いて実写映像から目標車両を特定する。特定には、受信した目標車両の絶対速度から自車の速度を引き、実写映像として表示される目標車両の相対的な速度を算出してもよい。
【0049】
S14では、画像処理手段24が、目標車両を実写映像から抽出できたかどうかを判断する。抽出できた場合は、S15に進み、抽出できなかった場合は、S20へ進む。
【0050】
S15では、S6と同様に、受信した周辺情報がある場合は、S14で抽出した目標車両と一致するかどうかを判断する。一致した場合はS16に進む。
【0051】
S16では、画像処理手段24が、実写映像における目標車両を強調表示する。S17では、画像処理手段24が、目標方向222に対応した画像や文字データを、S16で作成した強調表示済み実写映像に合成する。S18では、画像処理手段24が、S17で作成した実写案内を表示部28に表示し、ユーザを案内する。この時点で、目標車両に関する情報を用いて、例えば「右前10m先にいる、右折予定の白いセダンについていってください」というような音声案内を出力してもよい。
【0052】
S19では、誘導制御手段21が、直前の案内地点221が終了した後、これ以後案内地点が存在しない場合には、案内を終了する。案内地点がまだ残っている場合は、S4へ進む。
【0053】
S20では、再度目標車両を設定し直すかどうか閾値の比較を行う。閾値は、最後にS4において自車位置を検出した位置から相対的に離れた距離、時間の少なくともいずれかを用いる。判断の結果、S4、S6、S8、S11及びS13のいずれかに遷移することができるが、どこに遷移するかは任意とすることができる。
【0054】
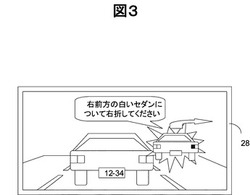
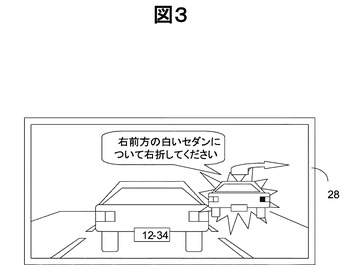
図3は、S18での表示部28の表示例である。このようにして、実写映像中において、自車と同一経路を走行する予定の目標車両を強調表示し、その目標車両に案内表示を合成した案内を行うことによって、実際に見えている風景を基にした経路の誘導を行うことができる。図3のメッセージは、例えば、記憶部22に記憶されているテキストデータを用いて表示することができる。
【0055】
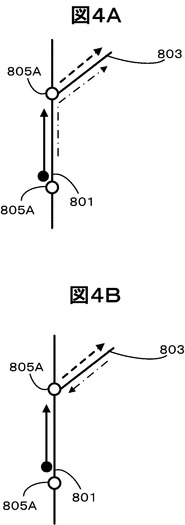
図4Aは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の一例を示す。
【0056】
図示しない電子的な地図に、例えば、交差点をノードとし道路をノード間を結ぶベクトルデータ(リンク)で表現した道路ネットワークデータが含まれているとする。この場合、ナビゲーション部2は、検出した自車の現在位置を道路ネットワークデータにマッチさせて画面に表示することができる。また、ナビゲーション部2は、道路形状や家枠形状等を詳細に表現した市街地図上で自車位置を表示する場合には、上記電子的な地図に含まれている市街地図画像を道路ネットワークデータに重ね合わせて表示することができる。
【0057】
さて、図4Aに例示するように、その道路ネットワークデータに自車の現在位置(●印)が重ねられて表示されているとする。ここでは、ノード805A、805B間を結ぶリンク801に現在位置が重ねられている。
【0058】
この図4Aにおいて、探索されユーザに選択された経路では、自車が、実線矢印で示すように、ノード805Aに対応する交差点から、点線矢印で示すように、斜め右に右折して進行するとする。以下、自車が現在属するリンク(図4Aでは801)を「進入リンク」と呼び、自車が次に入ろうとするリンク(図4Aでは803)を「脱出リンク」と呼ぶ。
【0059】
目標車両確定手段25が、通信部11による車車間通信により、一点鎖線矢印で示すように、自分と同じように進行する他車が自車位置の所定範囲内且つ前方に存在することを特定できたとする。言い換えれば、現在は、自車位置の所定範囲内且つ前方であって、自車と同じ進入リンク801に存在し、やがては自車と同様の脱出リンク803に脱出する他車を特定できたとする。この場合、目標車両確定手段25は、その他車を目標車両として確定することができる。目標車両確定手段25は、その他車の他車情報を画像処理手段25に通知する。画像処理手段25は、撮影画像(実写画像)を解析し、解析結果と通知された他車情報とを基に、撮影画像に写っている複数のオブジェクト(例えば車両や建造物など)のうちのどれが、目標車両として確定された他車であるかを判別し、判別された他車を強調表示することができる。ここで、強調表示とは、例えば、他車の画像の輪郭を太線で表示する、或いは他車の画像の傍に他車を指し示すマーク(例えば矢印)を示すなど、目標車両が他のオブジェクトとは異なるということを分かり易く表示することである。また、撮影画像の解析では、例えば、各画素と隣の画素の属性(例えば輝度)の差を判定し、その差が一定値以上に大きい場合にはそこが、オブジェクト(例えば他車)と他のオブジェクト(例えば、別の他車、道路或いは建造物)との境界であると判定することができる。また、撮影画像の解析では、他車との車車間通信によって通信相手の他車の速度、加速度などから自車との相対速度を求めることもできる。
【0060】
図4Bは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の別の一例を示す。
【0061】
目標車両確定手段25は、例えば、図4Aに示すような他車が存在しない場合、或いは存在しても、別の他車によってその他車が隠れて撮影画像に写っていない場合などの所与の場合に、この図4Bのナビゲーション態様を採用することができる。
【0062】
目標車両確定手段25が、通信部11による車車間通信により、一点鎖線矢印で示すように、自車と同じ進入リンク801には存在せず、且つ、自車とは進行方向が全く逆であるが、現在は、自車の脱出リンク803を進入リンクとして存在し、やがては、自車の進入リンク801を脱出リンクとする他車を特定できたとする。この場合、目標車両確定手段25は、その他車を目標車両として確定することができる。
【0063】
以上、上述した実施形態によれば、車車間通信によって得られた情報と撮影画像の解析結果との両方を用いて目標車両を探し、探し出された目標車両が写っている撮影画像を表示し、且つ、その撮影画像上に目標車両を指し示す。これにより、自車の近傍に目標となりそうな建造物が無く、或いは、自車の近傍に多くの車両があってもどれを目標としたら良いかわかりづらいような場合であっても、運転者に分かり易く目標車両を示すと共に案内することができる。
【0064】
以上、本発明の一実施形態を説明したが、これは本発明の説明のための例示であって、本発明の範囲をこの実施形態にのみ限定する趣旨ではない。本発明は、他の種々の形態でも実施することが可能である。
【0065】
例えば、自車の案内の際に表示される撮影画像は動画像が好ましいが、ナビゲーション部2の能力(例えば画像処理能力)が低い場合には、静止画であっても良い。静止画であっても、運転者に目標車両を分かり易く示すことは可能であると考えられる。この場合、所定タイミング(例えば自車が車線変更したとき)或いは連続的に撮影を行い、その撮影の都度に、その撮影画像上で目標車両を強調表示することができる。
【0066】
また、図4A及び図4Bでは、道路ネットワークデータに自車の現在位置を重ねて表示する場合を例に採ったが、電子的な地図の形態はそれに限らない。例えば、ポリゴンで描画される地図であっても同様の案内をすることができる。
【0067】
また、例えば、夜間の場合には、目標車両を特定する際には、車両から発する光を目標車両として運転者に案内することもできる。これは、例えば、目標車両に相応しい他車の色が黒であって、夜間では解析しづらいような場合に有効である。
【0068】
また、例えば、複数の探索条件と各探索条件に優先順位が割り付けられている場合には、目標車両の探す際には、優先順位に従って、探索条件と周辺情報(例えば他車情報)とがマッチするか否かを判断し、マッチした場合には、以下、他の探索条件との比較を行うことなく、マッチした周辺情報に従うオブジェクト(例えば他車)を目標とすることができる。ここで、探索条件とは、目標とするオブジェクトを探索するための条件であって、具体的には、例えば、オブジェクト種類及びオブジェクト条件で構成することができる。オブジェクト種類とは、例えば、車或いは建造物などである。オブジェクト条件とは、例えば、オブジェクト種類が車であれば、自車の前方に位置する、自車と進行方向が同じである、自車と同じ脱出リンクに脱出する予定である、及び、相対速度が所定値以下である等のうちの少なくとも一つを採用することができる。また、オブジェクト種類が建造物であれば、例えば、所定秒以内に自車の近傍を通る、或いは自車の前方に位置する等を採用することができる。
【0069】
また、例えば、通信部11からは、他車から受ける他車情報と同様の情報要素を含んだ自車情報が送信されても良い。自車情報の送信経路としては、例えば、記憶部11、誘導制御手段21、目標車両確定手段25及び通信部11から他車とすることができる。
【0070】
また、例えば、目標車両確定手段25は、目標車両として相応しい他車が無い場合に、他種のオブジェクト(例えば自車の近傍の建造物)を目標オブジェクトとすることができる。
【0071】
また、例えば、通信部11は、他車が設置しているナビゲーション装置が保持している経路(他車においてユーザに選択された経路)を表す情報を含んだ他車情報を受信してもよい。その場合、目標車両確定手段25は、その経路を表す情報と自車の経路とに基づいて、目標車両とする他車を判断することができる。
【0072】
また、例えば、通信部11は、車車間通信に代えて又は加えて、建造物の近傍に設置された所定の通信機との通信、或いは所定の情報収集センタとの通信も行っても良い。
【0073】
また、例えば、通信部11は、入力された一又は複数の撮影画像を他車との間で送受信することができる。画像処理手段24は、他車から受信した撮影画像と、自車に関する情報である自車情報とを用いて、自車を他車からの撮影画像から抽出することにより、該他車から見た自車の相対的な位置関係を算出することができる。目標車両確定手段25は、自車の撮影画像上において、相対的な位置関係から該他車を抽出することによって、自車が抽出された撮影画像の送信元車両を特定し、特定された送信元車両を目標オブジェクトとすることができる。
【図面の簡単な説明】
【0074】
【図1】図1は、本発明の一実施形態に係る車両部及びナビゲーション装置の構成例を示す。
【図2】図2は、本実施形態で実写案内表示を行うための処理の流れの一例を示す。
【図3】図3は、S18での表示部28の表示例である。
【図4】図4Aは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の一例を示す。図4Bは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の別の一例を示す。
【符号の説明】
【0075】
1…車両部 2…ナビゲーション装置 11…通信部 12…撮影部 20…入力部 21…誘導制御手段 22…記憶部 23…撮影制御手段 24…画像処理手段 25…目標車両確定手段 27…音声出力部 28…表示部
【技術分野】
【0001】
本発明は、車両に搭載することができるナビゲーション装置に関する。
【背景技術】
【0002】
GPS(Global Positioning System)衛星から受信した位置情報を用いて、現在位置や速度を計算できる、車両用のナビゲーション装置が普及してきている。ナビゲーション装置は、一般に、電子化された地図上に、現在の自車位置を表示する機能を持っている。さらに、ナビゲーション装置は、ユーザが入力した目的地までの複数の経路を探索して提示する探索機能や、提示された複数の経路からユーザ所望の経路が選択された場合には、その経路に基づいて進路方向を案内する誘導機能も持っている。
【0003】
特に、最近のナビゲーション装置では、推奨の経路を走行中に、案内を行う地点に接近すると、3次元アニメーションを用いて交差点や高架などの道路構造の拡大図を表示するものや、地図上で周辺に存在する施設を表示し、その施設の場所を目印として誘導するものもある。
【0004】
しかし、上記のような3次元アニメーションは、実際に運転者が見ている風景とは異なることが多く、進行すべき方向を認識しづらいことがある。また、電子地図上のデータが更新されない場合には、実際の周辺施設に関する情報が変化している可能性があり、実際には存在しない施設を目印として案内したりしてしまうこともある。さらに、案内地点の周辺に目印となる建造物が存在しない場合、目印を利用した誘導案内ができないということもある。
【0005】
特許文献1には、撮影された実写画像における道路情報を検知し、案内地点の情報と道路情報が一致する場合に、実写画像と案内画像を重ね合わせて表示する方法が記載されている。
【0006】
特許文献2には、他の車両から車車間通信によって受信した、位置や方向、特徴情報といった他車情報を用いて、自車の進行方向を他車情報に関連付けて案内をすることが記載されている。
【0007】
【特許文献1】特開2005−214857号公報
【特許文献2】特開2005−207999号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1の技術では、自車の周囲に他の車両が走行している場合には、実写画像から常に安定して道路情報を検知することは難しい。
【0009】
また、上記特許文献2では、位置情報と走行方向の情報の他、他車の特徴情報として車種や車両カテゴリ、車色等を受信し、それらの情報に関連付けて目標となる車両を報知するが、類似した車両が周辺に複数存在する場合は、目標とする車両の特定が困難である。
【0010】
本発明は、これらの問題点を解決するために考案されたものであり、道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できるようにすることを目的とする。
【0011】
本発明の他の目的は、後の説明から明らかになるであろう。
【課題を解決するための手段】
【0012】
本発明に従うナビゲーション装置は、自車の周辺に関する周辺情報を受信する通信手段と、自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する撮影画像入力手段と、前記入力された一又は複数の撮影画像を解析することにより、前記一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する画像処理手段と、前記受信した周辺情報と、前記一又は複数の撮影画像の解析の結果とに基づいて、前記判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する目標オブジェクト判断手段と、前記目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、前記目標オブジェクトを強調表示する表示手段とを備える。
【発明の効果】
【0013】
本発明のナビゲーション装置によれば、道路情報を安定して検知できない場合や、もしくは目標とする車両の特定が困難な場合においても、自車の進むべき方向をわかりやすく案内できる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照して、本発明の一実施形態について説明する。
【0015】
図1は、本発明の一実施形態に係る車両部及びナビゲーション装置の構成例を示す。
【0016】
車両部1は、ナビゲーション部2を設置する車両を指す。通信部11及び撮影部12のうちの少なくとも一つを、車両部1或いはナビゲーション部2に搭載することができる。
【0017】
通信部11は、車両部1と別の物体(例えば車両部或いは建物)に搭載されている別の通信部と通信を行うことができる装置である。通信部11は、一又は複数台搭載することができる。搭載する台数は、例えば、通信相手の数や通信プロトコルに基づいて決めることができる。
【0018】
撮影部12は、車両部1の周辺を撮影する撮影装置(例えばデジタルビデオカメラ)である。撮影部12は、一又は複数台搭載することができる。搭載する台数は、例えば、撮影方向や撮影範囲に基づいて決めることができる。
【0019】
ナビゲーション部2は、入力部20、誘導制御手段21、記憶部22、撮影制御手段23、画像処理手段24、目標車両確定手段25、音声制御手段26、音声出力部27、及び表示部28を備える。これらの構成要素のうち、音声制御手段26及び音声出力部27は無くても良い。各部や各手段は、ハードウェア(例えば回路)、コンピュータプログラム、或いはそれらの組み合わせ(例えば、コンピュータプログラムを読み込んで実行する一又は複数のCPU)によって実現することもできる。各コンピュータプログラムは、コンピュータマシンに備えられる記憶資源(例えばメモリ)から読み込むことができる。その記憶資源には、CD−ROMやDVD(Digital Versatile Disk)等の記録媒体を介してインストールすることもできるし、インターネットやLAN等の通信ネットワークを介してダウンロードすることもできる。
【0020】
入力部20は、ナビゲーション部2のユーザが目的地を設定したり、経路を設定したりするための入力装置である。
【0021】
誘導制御手段21は、誘導の制御に関する処理を実行する。例えば、誘導制御手段21は、ユーザが選択した経路に関して、案内地点221及び目標方向222を算出し、案内情報を作成する。また、例えば、誘導制御手段21は、車両部1の走行中に、記憶部22の自車位置220のデータを読み出し、案内地点221に接近したかどうかを判断する。車両部1が案内地点222に接近したと判断した場合、誘導制御手段1は、撮影制御手段23に対して実写映像を画像処理手段24に転送するよう命令する。また、例えば、誘導制御手段1は、目標方向222を画像処理手段24に渡し、実写画像に合成するよう命令する。さらに、誘導制御手段1は、例えば、目標方向222を目標車両確定手段25に渡し、案内表示時に目印となるかどうか判断を依頼する。
【0022】
記憶部22は、ハードディスク或いはDVD(Digital Versatile Disk)などの記憶装置である。記憶部22には、電子的な情報が記憶される。具体的には、記憶部22は、自車位置220、案内地点221及び目標方向222を記憶することができる。また、記憶部22は、音声データ223を案内地点221や目標方向222に関連させて記憶することもできる。自車情報のうち動的に変化する情報(動的情報)224として、記憶部22は、上記の自車位置220の他、現在の自車速度2241、加速度2242、進行方向2243を記憶することもできる。さらに、自車情報のうち静的な情報(静的情報)225として、記憶部22は、自車の色2251、形状2252、自動車登録番号2253を記憶することもできる。
【0023】
自車位置220は、GPS(Global Positioning System)衛星から取得した現在位置の情報や、初期設定に基づいた位置に対して、3次元ジャイロ、車速の情報等で差分を反映させた位置情報を含んだものとすることができる。案内地点221は、入力部20によって目的地と自車位置220とを結ぶ経路において案内が必要な地点の集合とすることができる。目標方向222は、案内地点221と組み合わせて記憶させることができる(例えば、案内地点221が交差点の場合は、交差点に進入する道路に対して、脱出する道路の相対的な角度であるとすることができる)。音声データ223は、案内地点221に固有の地点名や、目標方向222に対応した角度に関する音声データや、案内情報を構成する音声データの部分全般を含めることができる。
【0024】
撮影制御手段23は、誘導制御手段21の要求に基づいて、撮影部12における撮影の開始や終了などの制御を行い、さらに、撮影映像を画像処理手段24に転送することができる。
【0025】
画像処理手段24は、撮影制御手段23から受け取った実写映像に基づいて、種々の処理、例えば、目標車両の抽出及び強調表示処理、案内情報の合成処理、実写案内表示転送処理を実行することができる。目標車両の抽出及び強調表示処理では、目標車両確定手段25から受け取る目標車両に関する情報を用いて、実写映像からその目標車両を特定することが行われる。案内情報の合成処理では、目標方向222に対応する画像を、前記実写映像に重ね合わせることが行われる。実写案内表示転送処理では、強調表示された車両を含む実写画像と、案内表示を重ね合わせた実写案内映像を表示部28に転送し、表示させることが行われる。
【0026】
目標車両確定手段25は、通信部11が受信した他車情報もしくは、画像処理手段24から転送される実写映像の少なくともどちらかと、記憶部22に格納している動的情報224、静的情報225、目標方向222の少なくともいずれかと、を比較し、実写映像から目標車両群を抽出する。ここで、目標車両確定手段25は、通信部11から受信した他車情報が無く、実写映像のみしか利用できない場合は、実写映像から他車情報を抽出し、記憶部22に格納している動的情報224、静的情報225、目標方向222の少なくともいずれかと、を比較し、実写映像から目標車両群を抽出することができる。そして、目標車両確定手段25は、目標車両群を抽出した後は、その中から自車(車両部1)により近い車両を特定し、案内を行う際の目標車両を確定することができる。その後、目標車両確定手段25は、画像処理手段24に対して、目標車両の強調表示、および目標方向222に対応する画像データの合成を依頼することができる。また、目標車両確定手段25は、音声制御手段26に案内音声を出力するよう依頼することができる。
【0027】
音声制御手段26は、目標車両確定手段26から受け取った目標車両の情報、必要ならば音声データ223を合成し、音声出力部27で案内音声を出力する。
【0028】
音声出力部27は、案内音声等を出力するための設置されるスピーカ、もしくはイヤホン等のデバイスである。音声出力部27は、音声制御手段27からの案内音声を出力する。
【0029】
表示部28は、ユーザに対して、目的地の選択、探索経路の表示、実写映像の表示、実写案内の表示を行うための、例えば液晶ディスプレイのようなデバイスである。表示部28は、画像処理手段24から転送されて来た画像を表示することができる。
【0030】
図2は、本実施形態で実写案内表示を行うための処理の流れの一例を示す。
【0031】
ステップS1では、ユーザが、入力部20を用いて、目的地を入力する。
【0032】
S2では、誘導制御手段21が、自車位置220(例えばGPS衛星からの信号を基に把握された現在位置)とユーザから入力された目的地とを結ぶ経路を探索し(例えば図示しない電子的な地図を用いて探索し)、探索された一又は複数の経路を、画像処理手段24に送信し、画像処理手段24により、表示部28に表示させる。
【0033】
S3では、誘導制御手段21が、ユーザから経路の選択を入力部20を介して受けた場合、選択された経路に関して、案内地点221と目標方向222のセットの集合を算出する。S4では、誘導制御手段21は、自車(車両部1)の現在位置をGPS衛星からの信号に基づいて検出する。
【0034】
S5では、誘導制御手段21が、検出された自車位置がS3で算出した案内地点221のどれかに接近したかどうかを判定する。接近していないと判定した場合は、S4に戻り、接近したと判定した場合は、誘導制御手段21は、その旨を目標車両確定手段27に通知する。
【0035】
S6では、目標車両確定手段27が、通信部11が周辺情報を受信しているかどうか検出する。周辺情報を受信している場合は、S7へ進み、受信していない場合は、S13へ進む。なお、周辺情報とは、例えば、自車周辺の他車、周辺道路、周辺施設等の少なくともいずれかに関する情報である。
【0036】
S7では、目標車両確定手段27が、受信した周辺情報の解析を開始する。なお、S5でYesの通信を開始してもよいし、もしくは、常時通信しておいて解析をこの時点で開始してもよい。
【0037】
S8では、目標車両確定手段27が、案内地点221に関して、受信した周辺情報のうち、送信元の他車の経路が自車の経路と同一であるか判定する。同一経路であった場合はS9に進み、同一経路でなかった場合は、他の車両について受信した周辺情報を解析するため、S7へ戻る。ただし、同一経路とは、同一方向に限定されず、目的地方向から自車と反対向きに走行してきた他車も、同一経路を走行していると見なしてもよい。
【0038】
S9では、目標車両確定手段27が、経路が同一である目標車両の集合を確定する。この集合を以降、目標車両群という。
【0039】
S10では、目標車両確定手段27が、目標車両群について、受信した経路以外の他車に関する情報(他車情報)を解析する。ここでいう他車情報とは、目標車両群の各々の位置情報、速度、加速度、進行方向、操舵角の少なくともいずれかであり、目標車両確定手段27が、これらと自車情報とを比較する。
【0040】
具体的には、例えば、目標車両は自車から近い車両が適しているため、目標車両確定手段27は、自車と目標車両群中の各々の位置情報を比較し、自車から所定範囲内に属する車両(つまり近傍の車両)を抽出する。さらに、目標車両確定手段27は、自車の進行方向および操舵角を基に、目標車両群中の各々の車両が自車の経路上にあるかどうかを判定する。この他、速度、加速度の情報を用いて目標車両に適するかどうかを判定することもできる。
【0041】
また、上記の他車情報のみでは目標車両の位置を特定できない場合には、目標車両確定手段27は、目標車両の撮影部が撮影した実写映像を受信し、自車情報を用いて、実写映像から自車を抽出し、自車と目標車両との位置関係を相対的に算出してもよい。この処理は、画像処理手段24と協働して行うことができる。ここでいう自車情報とは、自車に関する色、形状(例えばセダン、ワゴンなど)、自動車登録番号等である。
【0042】
このようにして、目標車両群のうちの一車両が自車と同一の経路上にあるか、もしくは自車の経路上に向かうことが予測できる場合は、目標車両確定手段27が、そのような他車を目標車両の一つの候補とし、S11へ進む。
【0043】
一方、すべての目標車両群の車両がこれらの条件を満たせない場合は、撮影部から取得した実写映像のうち、道路上もしくは道路脇のオブジェクト(例えば、情報、建造物、施設の少なくともいずれか)を用いて、自車周辺における静的な目標物体を決定してもよい。道路上の情報とは、例えば、標識や標示、車線をさす。また、道路上の建造物とは、車線、中央分離帯、横断歩道等を指す。また、道路脇の建造物とは、信号機、高架橋、陸橋、電信柱、ポスト等をさす。これらの静的目標物体を実写映像から抽出した上で、自車と静的目標物体との距離を認識した上で、案内地点の目印とし、これ以降、静的目標物体を目標車両の代替として使用してもよい。
【0044】
S11では、目標車両確定手段27が、他車の位置情報と自車位置220を比較する。目標車両群のうち、自車により近い目標車両がなくなれば、S12へ進み、現在解析中の目標車両群のうち、自車により近い他車がまだ存在する場合は、S10へ戻る。
【0045】
S12では、目標車両確定手段27が、目標車両群から目標車両を確定する。確定後はS13へ進む。基本的には、この目標車両を目印として案内を行う。確定した目標車両に関する情報が画像処理手段24に通知される。
【0046】
S13では、撮影部12で撮影された実写映像から、S12で確定した目標車両が抽出されたり、車両以外の周辺の情報が抽出されたりする。
【0047】
まず、目標車両の抽出について説明する。S6で受信した周辺情報が無かった場合には、目標車両確定手段27が、撮影された範囲の周辺車両について、車間距離、位置、車速、加速度、方向指示器の点滅状態、形状、自動車登録番号、操舵角、進行方向の少なくともいずれかの情報を実写映像から算出、もしくは抽出し、これらの情報を用いて、目標車両を確定する。例えば、自車と同一経路が案内地点において右折である場合、右側の方向指示器の点滅や操舵角と連動するタイヤの向きを検知し、上記算出、抽出した情報、例えば位置や形状等を用いて目標車両を特定する。
【0048】
一方、S6で受信した周辺情報がある場合には、目標車両確定手段27が、既に受信してある目標車両の位置、速度等の情報を用いて実写映像から目標車両を特定する。特定には、受信した目標車両の絶対速度から自車の速度を引き、実写映像として表示される目標車両の相対的な速度を算出してもよい。
【0049】
S14では、画像処理手段24が、目標車両を実写映像から抽出できたかどうかを判断する。抽出できた場合は、S15に進み、抽出できなかった場合は、S20へ進む。
【0050】
S15では、S6と同様に、受信した周辺情報がある場合は、S14で抽出した目標車両と一致するかどうかを判断する。一致した場合はS16に進む。
【0051】
S16では、画像処理手段24が、実写映像における目標車両を強調表示する。S17では、画像処理手段24が、目標方向222に対応した画像や文字データを、S16で作成した強調表示済み実写映像に合成する。S18では、画像処理手段24が、S17で作成した実写案内を表示部28に表示し、ユーザを案内する。この時点で、目標車両に関する情報を用いて、例えば「右前10m先にいる、右折予定の白いセダンについていってください」というような音声案内を出力してもよい。
【0052】
S19では、誘導制御手段21が、直前の案内地点221が終了した後、これ以後案内地点が存在しない場合には、案内を終了する。案内地点がまだ残っている場合は、S4へ進む。
【0053】
S20では、再度目標車両を設定し直すかどうか閾値の比較を行う。閾値は、最後にS4において自車位置を検出した位置から相対的に離れた距離、時間の少なくともいずれかを用いる。判断の結果、S4、S6、S8、S11及びS13のいずれかに遷移することができるが、どこに遷移するかは任意とすることができる。
【0054】
図3は、S18での表示部28の表示例である。このようにして、実写映像中において、自車と同一経路を走行する予定の目標車両を強調表示し、その目標車両に案内表示を合成した案内を行うことによって、実際に見えている風景を基にした経路の誘導を行うことができる。図3のメッセージは、例えば、記憶部22に記憶されているテキストデータを用いて表示することができる。
【0055】
図4Aは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の一例を示す。
【0056】
図示しない電子的な地図に、例えば、交差点をノードとし道路をノード間を結ぶベクトルデータ(リンク)で表現した道路ネットワークデータが含まれているとする。この場合、ナビゲーション部2は、検出した自車の現在位置を道路ネットワークデータにマッチさせて画面に表示することができる。また、ナビゲーション部2は、道路形状や家枠形状等を詳細に表現した市街地図上で自車位置を表示する場合には、上記電子的な地図に含まれている市街地図画像を道路ネットワークデータに重ね合わせて表示することができる。
【0057】
さて、図4Aに例示するように、その道路ネットワークデータに自車の現在位置(●印)が重ねられて表示されているとする。ここでは、ノード805A、805B間を結ぶリンク801に現在位置が重ねられている。
【0058】
この図4Aにおいて、探索されユーザに選択された経路では、自車が、実線矢印で示すように、ノード805Aに対応する交差点から、点線矢印で示すように、斜め右に右折して進行するとする。以下、自車が現在属するリンク(図4Aでは801)を「進入リンク」と呼び、自車が次に入ろうとするリンク(図4Aでは803)を「脱出リンク」と呼ぶ。
【0059】
目標車両確定手段25が、通信部11による車車間通信により、一点鎖線矢印で示すように、自分と同じように進行する他車が自車位置の所定範囲内且つ前方に存在することを特定できたとする。言い換えれば、現在は、自車位置の所定範囲内且つ前方であって、自車と同じ進入リンク801に存在し、やがては自車と同様の脱出リンク803に脱出する他車を特定できたとする。この場合、目標車両確定手段25は、その他車を目標車両として確定することができる。目標車両確定手段25は、その他車の他車情報を画像処理手段25に通知する。画像処理手段25は、撮影画像(実写画像)を解析し、解析結果と通知された他車情報とを基に、撮影画像に写っている複数のオブジェクト(例えば車両や建造物など)のうちのどれが、目標車両として確定された他車であるかを判別し、判別された他車を強調表示することができる。ここで、強調表示とは、例えば、他車の画像の輪郭を太線で表示する、或いは他車の画像の傍に他車を指し示すマーク(例えば矢印)を示すなど、目標車両が他のオブジェクトとは異なるということを分かり易く表示することである。また、撮影画像の解析では、例えば、各画素と隣の画素の属性(例えば輝度)の差を判定し、その差が一定値以上に大きい場合にはそこが、オブジェクト(例えば他車)と他のオブジェクト(例えば、別の他車、道路或いは建造物)との境界であると判定することができる。また、撮影画像の解析では、他車との車車間通信によって通信相手の他車の速度、加速度などから自車との相対速度を求めることもできる。
【0060】
図4Bは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の別の一例を示す。
【0061】
目標車両確定手段25は、例えば、図4Aに示すような他車が存在しない場合、或いは存在しても、別の他車によってその他車が隠れて撮影画像に写っていない場合などの所与の場合に、この図4Bのナビゲーション態様を採用することができる。
【0062】
目標車両確定手段25が、通信部11による車車間通信により、一点鎖線矢印で示すように、自車と同じ進入リンク801には存在せず、且つ、自車とは進行方向が全く逆であるが、現在は、自車の脱出リンク803を進入リンクとして存在し、やがては、自車の進入リンク801を脱出リンクとする他車を特定できたとする。この場合、目標車両確定手段25は、その他車を目標車両として確定することができる。
【0063】
以上、上述した実施形態によれば、車車間通信によって得られた情報と撮影画像の解析結果との両方を用いて目標車両を探し、探し出された目標車両が写っている撮影画像を表示し、且つ、その撮影画像上に目標車両を指し示す。これにより、自車の近傍に目標となりそうな建造物が無く、或いは、自車の近傍に多くの車両があってもどれを目標としたら良いかわかりづらいような場合であっても、運転者に分かり易く目標車両を示すと共に案内することができる。
【0064】
以上、本発明の一実施形態を説明したが、これは本発明の説明のための例示であって、本発明の範囲をこの実施形態にのみ限定する趣旨ではない。本発明は、他の種々の形態でも実施することが可能である。
【0065】
例えば、自車の案内の際に表示される撮影画像は動画像が好ましいが、ナビゲーション部2の能力(例えば画像処理能力)が低い場合には、静止画であっても良い。静止画であっても、運転者に目標車両を分かり易く示すことは可能であると考えられる。この場合、所定タイミング(例えば自車が車線変更したとき)或いは連続的に撮影を行い、その撮影の都度に、その撮影画像上で目標車両を強調表示することができる。
【0066】
また、図4A及び図4Bでは、道路ネットワークデータに自車の現在位置を重ねて表示する場合を例に採ったが、電子的な地図の形態はそれに限らない。例えば、ポリゴンで描画される地図であっても同様の案内をすることができる。
【0067】
また、例えば、夜間の場合には、目標車両を特定する際には、車両から発する光を目標車両として運転者に案内することもできる。これは、例えば、目標車両に相応しい他車の色が黒であって、夜間では解析しづらいような場合に有効である。
【0068】
また、例えば、複数の探索条件と各探索条件に優先順位が割り付けられている場合には、目標車両の探す際には、優先順位に従って、探索条件と周辺情報(例えば他車情報)とがマッチするか否かを判断し、マッチした場合には、以下、他の探索条件との比較を行うことなく、マッチした周辺情報に従うオブジェクト(例えば他車)を目標とすることができる。ここで、探索条件とは、目標とするオブジェクトを探索するための条件であって、具体的には、例えば、オブジェクト種類及びオブジェクト条件で構成することができる。オブジェクト種類とは、例えば、車或いは建造物などである。オブジェクト条件とは、例えば、オブジェクト種類が車であれば、自車の前方に位置する、自車と進行方向が同じである、自車と同じ脱出リンクに脱出する予定である、及び、相対速度が所定値以下である等のうちの少なくとも一つを採用することができる。また、オブジェクト種類が建造物であれば、例えば、所定秒以内に自車の近傍を通る、或いは自車の前方に位置する等を採用することができる。
【0069】
また、例えば、通信部11からは、他車から受ける他車情報と同様の情報要素を含んだ自車情報が送信されても良い。自車情報の送信経路としては、例えば、記憶部11、誘導制御手段21、目標車両確定手段25及び通信部11から他車とすることができる。
【0070】
また、例えば、目標車両確定手段25は、目標車両として相応しい他車が無い場合に、他種のオブジェクト(例えば自車の近傍の建造物)を目標オブジェクトとすることができる。
【0071】
また、例えば、通信部11は、他車が設置しているナビゲーション装置が保持している経路(他車においてユーザに選択された経路)を表す情報を含んだ他車情報を受信してもよい。その場合、目標車両確定手段25は、その経路を表す情報と自車の経路とに基づいて、目標車両とする他車を判断することができる。
【0072】
また、例えば、通信部11は、車車間通信に代えて又は加えて、建造物の近傍に設置された所定の通信機との通信、或いは所定の情報収集センタとの通信も行っても良い。
【0073】
また、例えば、通信部11は、入力された一又は複数の撮影画像を他車との間で送受信することができる。画像処理手段24は、他車から受信した撮影画像と、自車に関する情報である自車情報とを用いて、自車を他車からの撮影画像から抽出することにより、該他車から見た自車の相対的な位置関係を算出することができる。目標車両確定手段25は、自車の撮影画像上において、相対的な位置関係から該他車を抽出することによって、自車が抽出された撮影画像の送信元車両を特定し、特定された送信元車両を目標オブジェクトとすることができる。
【図面の簡単な説明】
【0074】
【図1】図1は、本発明の一実施形態に係る車両部及びナビゲーション装置の構成例を示す。
【図2】図2は、本実施形態で実写案内表示を行うための処理の流れの一例を示す。
【図3】図3は、S18での表示部28の表示例である。
【図4】図4Aは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の一例を示す。図4Bは、本実施形態に係るナビゲーション部2が行うことのできるナビゲーション態様の別の一例を示す。
【符号の説明】
【0075】
1…車両部 2…ナビゲーション装置 11…通信部 12…撮影部 20…入力部 21…誘導制御手段 22…記憶部 23…撮影制御手段 24…画像処理手段 25…目標車両確定手段 27…音声出力部 28…表示部
【特許請求の範囲】
【請求項1】
自車の周辺に関する周辺情報を受信する通信手段と、
自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する撮影画像入力手段と、
前記入力された一又は複数の撮影画像を解析することにより、前記一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する画像処理手段と、
前記受信した周辺情報と、前記一又は複数の撮影画像の解析の結果とに基づいて、前記判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する目標オブジェクト判断手段と、
前記目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、前記目標オブジェクトを強調表示する表示手段と
を備えたナビゲーション装置。
【請求項2】
前記周辺情報は、他車に関する情報である他車情報であって、前記他車から車車間通信によって受信したものであり、
前記画像処理手段は、前記一又は複数の撮影画像から一又は複数の他車を判別し、
前記目標オブジェクトは、前記判別された一又は複数の他車の中から選択された他車である、
請求項1記載のナビゲーション装置。
【請求項3】
前記目標オブジェクト判断手段は、前記目標オブジェクトとして他車を優先的に探し、目標オブジェクトとして適切な他車が判別されない場合に、他種のオブジェクトを目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項4】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車の前方であって自車と進行方向が同じ他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項5】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車とは進行方向が異なるが、自車の前方であって、自車が進行することになる場所に位置する他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項6】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車の前方であって自車と進行方向が同じ他車を判断し、該他車があれば、該他車を目標オブジェクトとし、該他車が無い或いは該他車が写っている撮影画像がない場合には、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車とは進行方向が異なるが、自車の前方であって、自車が進行することになる場所に位置する他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項7】
前記他車情報には、他車の速度及び加速度のうちの少なくとも速度が含まれており、
前記目標オブジェクト判断手段は、自車の速度及び加速度のうちの少なくとも速度と、受信した他車情報に含まれている速度及び加速度のうちの少なくとも速度とに基づいて、自車と他車との相対速度を判断し、相対速度が所定値以下の他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項8】
前記他車情報には、他車の色、形状、自動車登録番号、速度、加速度、操舵角、車間距離、方向指示器の点滅、及び、他車が設置しているナビゲーション装置が保持している経路の少なくとも一つが含まれており、
前記前記目標オブジェクト判断手段は、自車に関する情報と前記他車情報とに基づいて、目標オブジェクトとする他車を判断する、
請求項2記載のナビゲーション装置。
【請求項9】
前記通信手段は、入力された一又は複数の撮影画像を送受信し、
前記画像処理手段は、他車から受信した撮影画像と、自車に関する情報である自車情報とを用いて、自車を前記他車からの撮影画像から抽出することにより、該他車から見た自車の相対的な位置関係を算出し、
前記目標オブジェクト判断手段は、自車の撮影画像上において、相対的な位置関係から該他車を抽出することによって、前記自車が抽出された撮影画像の送信元車両を特定し、前記特定された送信元車両を前記目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項10】
自車の外を撮影する撮影手段を更に備え、
前記撮影画像入力手段は、前記撮影手段によって撮影された画像を入力する、
請求項1乃至9のいずれか1項に記載のナビゲーション装置。
【請求項11】
所定のタイミングで前記撮影手段に撮影を実行させる撮影制御手段を更に備えた、
請求項10記載のナビゲーション装置。
【請求項12】
音声制御手段と音声出力部を備え、前記通信部が受信した周辺情報を用いて自車情報と比較した結果、目標オブジェクトとして利用可能であると前記目標オブジェクト判断手段により判断された場合には、前記音声制御手段が、周辺情報に対応する音声データを合成して音声ガイドを生成し、音声出力部が該音声ガイドを出力する、
請求項1乃至11のいずれか1項に記載のナビゲーション装置。
【請求項1】
自車の周辺に関する周辺情報を受信する通信手段と、
自車の外に存在する複数のオブジェクトが写った一又は複数の撮影画像を入力する撮影画像入力手段と、
前記入力された一又は複数の撮影画像を解析することにより、前記一又は複数の撮影画像に写っている各オブジェクトとそのオブジェクトの属性とを判別する画像処理手段と、
前記受信した周辺情報と、前記一又は複数の撮影画像の解析の結果とに基づいて、前記判別された複数のオブジェクトのうちのどのオブジェクトを目標オブジェクトとするかを判断する目標オブジェクト判断手段と、
前記目標オブジェクトとされたオブジェクトが写っている撮影画像を表示し、且つ、該撮影画像上で、前記目標オブジェクトを強調表示する表示手段と
を備えたナビゲーション装置。
【請求項2】
前記周辺情報は、他車に関する情報である他車情報であって、前記他車から車車間通信によって受信したものであり、
前記画像処理手段は、前記一又は複数の撮影画像から一又は複数の他車を判別し、
前記目標オブジェクトは、前記判別された一又は複数の他車の中から選択された他車である、
請求項1記載のナビゲーション装置。
【請求項3】
前記目標オブジェクト判断手段は、前記目標オブジェクトとして他車を優先的に探し、目標オブジェクトとして適切な他車が判別されない場合に、他種のオブジェクトを目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項4】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車の前方であって自車と進行方向が同じ他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項5】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車とは進行方向が異なるが、自車の前方であって、自車が進行することになる場所に位置する他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項6】
前記他車情報には、他車の位置、進行方向、速度、加速度、色及び形状のうちの少なくとも一つの情報要素が含まれており、
前記目標オブジェクト判断手段は、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車の前方であって自車と進行方向が同じ他車を判断し、該他車があれば、該他車を目標オブジェクトとし、該他車が無い或いは該他車が写っている撮影画像がない場合には、探索されユーザから選択された経路と、受信した他車情報に含まれている所定種類の情報要素に基づいて、自車とは進行方向が異なるが、自車の前方であって、自車が進行することになる場所に位置する他車を判断し、該判断された他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項7】
前記他車情報には、他車の速度及び加速度のうちの少なくとも速度が含まれており、
前記目標オブジェクト判断手段は、自車の速度及び加速度のうちの少なくとも速度と、受信した他車情報に含まれている速度及び加速度のうちの少なくとも速度とに基づいて、自車と他車との相対速度を判断し、相対速度が所定値以下の他車を目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項8】
前記他車情報には、他車の色、形状、自動車登録番号、速度、加速度、操舵角、車間距離、方向指示器の点滅、及び、他車が設置しているナビゲーション装置が保持している経路の少なくとも一つが含まれており、
前記前記目標オブジェクト判断手段は、自車に関する情報と前記他車情報とに基づいて、目標オブジェクトとする他車を判断する、
請求項2記載のナビゲーション装置。
【請求項9】
前記通信手段は、入力された一又は複数の撮影画像を送受信し、
前記画像処理手段は、他車から受信した撮影画像と、自車に関する情報である自車情報とを用いて、自車を前記他車からの撮影画像から抽出することにより、該他車から見た自車の相対的な位置関係を算出し、
前記目標オブジェクト判断手段は、自車の撮影画像上において、相対的な位置関係から該他車を抽出することによって、前記自車が抽出された撮影画像の送信元車両を特定し、前記特定された送信元車両を前記目標オブジェクトとする、
請求項2記載のナビゲーション装置。
【請求項10】
自車の外を撮影する撮影手段を更に備え、
前記撮影画像入力手段は、前記撮影手段によって撮影された画像を入力する、
請求項1乃至9のいずれか1項に記載のナビゲーション装置。
【請求項11】
所定のタイミングで前記撮影手段に撮影を実行させる撮影制御手段を更に備えた、
請求項10記載のナビゲーション装置。
【請求項12】
音声制御手段と音声出力部を備え、前記通信部が受信した周辺情報を用いて自車情報と比較した結果、目標オブジェクトとして利用可能であると前記目標オブジェクト判断手段により判断された場合には、前記音声制御手段が、周辺情報に対応する音声データを合成して音声ガイドを生成し、音声出力部が該音声ガイドを出力する、
請求項1乃至11のいずれか1項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−193652(P2007−193652A)
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願番号】特願2006−12360(P2006−12360)
【出願日】平成18年1月20日(2006.1.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願日】平成18年1月20日(2006.1.20)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]