
ナビゲーション装置
【課題】 自立航法用センサからの距離情報を利用できない場合であっても、自車位置を精度良く算出することができる「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
【解決手段】 ナビゲーション装置における自車位置の更新方法は、自立航法センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位によるGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図上の道路上にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両等の移動体に搭載されるナビゲーション装置に関し、特に、自立航法用センサの距離情報を利用できないときの自車位置の更新方法に関する。
【背景技術】
【0002】
ナビゲーション装置は、自車位置を検出し、自車位置周辺の地図データをディスプレイに描画するとともに、地図上に車両マークを重ねて表示し、自車位置が変化すると、それに併せて地図をスクロールさせ道路地図を案内する機能を有している。また、目的地までの最適経路を探索し、探索された経路をディスプレイに表示し、同時に、探索経路による目的地までの到着時刻等を併せて表示している。
【0003】
ナビゲーション装置には、車両に搭載された距離センサや方位センサから自車位置を算出する自立航法と、衛星を利用したGPS測位により自車位置を算出する方法が実用化されている。自立航法用の距離センサは、例えば車速パルスを利用したものがあり、車速パルスは、車両が一定の距離を走行するたびにパルス信号を出力する。また、方位センサは、例えばジャイロセンサが利用されている。自立航法による自車位置の算出または更新は、距離センサにより得られた移動距離と方位センサにより得られた移動方向のベクトルを合成することにより計算される。
【0004】
自立航法は、比較的簡単な構成で自車位置を算出することができるが、相対的な位置検出であるため、高精度な位置測位を行うことが難しい。すなわち、自車が走行するにつれ誤差が累積し、自車位置の精度が悪化する。この精度の悪化を補償するために、地図データベースに含まれる道路(リンク)データを利用した、いわゆるマップマッチング処理が行われている。リンクデータは、道路の緯度、経度情報を含むものであり、自立航法により算出された自車位置を、リンクデータに照合させることで、自車位置の校正または修正を行っている。
【0005】
マップマッチング処理は、例えば特許文献1に開示されている。これによれば、第1のマップマッチング方法は、走行軌跡(所定走行距離毎の位置と方位)を保存しておき、該走行軌跡と同形の地図上の道路を求め、該道路上のポイントに車両位置マークをマップマッチングさせる方法(パターンマッチング)である。第2のマップマッチング方法は投影法による方法である。
【0006】
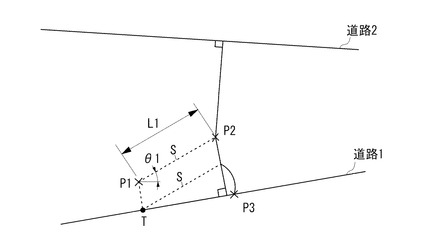
図8は投影法によるマップマッチングの説明図である。自車位置が点P1にあり、そこから距離L1、相対方位θ1だけ走行したときの自立航法による自車位置をP2とする。このとき、自車位置P2から垂線を降ろすことのできる道路(リンク)であって、自車位置P2での車両方位とリンクの成す角度が一定値以内で、かつ、自車位置P2からリンクに降ろした垂線の長さが一定距離以内となっているものを探す。ここでは道路1と道路2が探されたものとする。そして、自車位置P2から道路1、2に降ろした垂線の長さを求め、短い方のリンクをマッチング候補とする。ここでは道路1とする。そして、自車位置P1と自車位置P2を結ぶ走行軌跡Sを垂線の方向に平行移動し、道路1との交点Tを求め、交点Tを中心に道路1に来るまで走行軌跡Sを回転移動し、マップマッチングされた車両位置P3を得る。
【0007】
一方、GPS測位は、地球を周回する複数のGPS衛星の距離を測位し、3角測量の原理で車両位置を計算する。1回の位置測定に4個の衛星を使って3次元位置(経度、緯度、高度)を測定する3次元測位と、3つの衛星を使って2次元位置(経度、緯度)を測定する2次元測位がある。GPS測位は、絶対位置を検出することができるが、その精度は、電波受信状況に影響されやすく、常に精度が良いとは限らない。
【0008】
特許文献2は、電子地図とGPSレシーバを使用するオブジェクトの追跡システムに関し、GPS測位による精度の信頼性が高いときに、自車位置をGPS位置に更新している。すなわち、GPSレシーバは、複数の衛星からデータを受け取り、GPS導出位置と速度を決定する。オブジェクトの前の位置、GPS導出位置、速度、DOP、データが得られた衛星の連続性に基づいてシステムは、GPSデータが信頼できるか否か決定する。GPSデータが信頼できる場合、オブジェクトの前の位置は、GPS導出位置に更新される。更新された位置は、次いで地図の道路に一致される。
【0009】
【特許文献1】特開平6−337217号
【特許文献2】特表2001−509883号
【発明の開示】
【発明が解決しようとする課題】
【0010】
ナビゲーション装置を後から車両に取り付けるような場合、自立航法用の車速パルスを取得することができない場合がある。また、車両のエンジンをかけたままフェリーなどにより河川を移動するとき、車速パルスを利用することができな場合がある。車速パルスを取得できない状況または利用できない状況では、自立航法ができないため、GPS測位による情報をメインにした自車位置更新を行う必要がある。
【0011】
GPS測位のオープンスペースでの位置精度は、約10m(2DRMS)と言われているが、実際に遮蔽物や反射物が周辺に存在する環境では、場合によっては1km以上の測位誤差が発生することがある。このため、道路データベース上の位置を利用したマップマッチングを行うことで位置精度の補償をすることも可能であるが、GPS誤差が大きすぎると、誤ったマップマッチングとなり、間違った自車位置を表示したり、間違った案内をしてしまうという課題がある。
【0012】
本発明は、上記従来の課題を解決し、自立航法用センサからの距離情報を利用できない場合であっても、GPS測位情報に基づき自車位置を精度良く算出することができるナビゲーション装置および自車位置の更新方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明に係るナビゲーション装置では、自立航法用センサから距離情報、例えば、車速パルスレスの時、GPS測位情報による得られたGPS位置の変化量を自車位置に足しこんでいくことで、徐々に大きくなるGPS誤差の影響を抑えた自車位置の更新を行う。
【0014】
本発明に係る、自立航法用センサおよびGPS測位情報に基づき自車位置を算出し、算出された自車位置を道路地図上に表示するナビゲーション装置は、GPS測位情報から自車速度が一定値以上であって、かつ一定時間を継続しているとき、自立航法用センサから距離情報を利用可能であるか否かを判定する判定手段と、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報により得られた前回の経緯度と今回の経緯度との差分を算出し、当該差分により自車位置を更新する第1の更新手段とを有する。
【0015】
好ましくはナビゲーション装置はさらに、第1の更新手段により更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新手段を有する。また、第2の更新手段は、一定の条件を満足する道路候補が見つからないとき、一定の時間内にマップマッチングすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS位置に更新する。
【0016】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法用センサによる方位を自車方位とする方位決定手段と、当該自車方位に応じて自車位置マークをディスプレイに表示する表示手段とを有する。
【0017】
好ましくは、判定手段は、ナビゲーション装置が起動されてから一定時間経過後に車速パルスの有無をチェックし、車速パルスがないとき自立航法用センサの距離情報を利用することができないと判定する。起動直後には、信号にノイズが含まれることがあり、これを誤って検出しないようにするためである。
【0018】
本発明に係るナビゲーション装置における自車位置の更新方法は、自立航法用センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位情報に基づくGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
【発明の効果】
【0019】
本発明によれば、自立航法用センサからの距離情報を利用することができないとき、GPS測位情報による位置情報の差分(変化量)により自車位置を更新するようにしたので、徐々に大きくなるGPS測位による誤差の影響を抑制することができる。また、GPS測位情報による位置精度が悪化しても、GPS測位情報による位置変化量をマップマッチされた自車位置に足しこむことにより、正しい道路付近が新しい自車位置になる。このため、正しい道路にマップマッチングする確率が高くなる。これにより、GPS測位による誤差が大きい状態でも、ミスマッチの発生が抑制され、間違った自車位置表示や間違った案内をすることが少なくなる。
【発明を実施するための最良の形態】
【0020】
本発明の最良の実施の形態について図面を参照して詳細に説明する。
【実施例】
【0021】
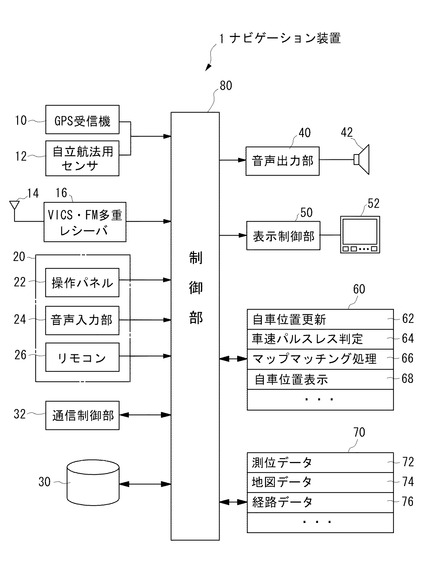
図1は、本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。同図に示すように、ナビゲーション装置1は、GPS衛星からの電波を受信して車両の現在位置と現在方位を測位するGPS受信機10、車速パスルやジャイロセンサを含む自立航法用センサ12、アンテナ14を介して車両外部の現在の道路交通情報を受信するVICS(Vehicle Information and Communication System)・FM多重レシーバ16、操作パネル22、音声入力部24およびリモコン操作部26を含むユーザー入力インターフェース20、大容量のハードディスクを有する記憶装置30、無線または有線によりデータ通信を可能とするデータ通信制御部32、スピーカ42から音声を出力させる音声出力部40、ディスプレイ52に画像を表示させる表示制御部50、プログラムを記憶するプログラムメモリ60、データを一時記憶するデータメモリ70、および制御部80を含んでいる。
【0022】
記憶装置30は、ナビゲーションの各種機能を実行するためのプログラムおよびデータベースを記憶する。プログラムは、目的地までのルート探索、目的地までの到着予定時刻算出、ルート案内などナビゲーションに必要な機能を含んでいる。データベースは、地図データ、施設データ等を含み、地図データは、道路に関するリンク(道路)データおよび交差点データを含む。リンクデータは、交差点と交差点とを連結する道路に関するデータであり、道路の始点と終点の経緯度を示すノードデータ、道路の種別(国道、一般道、県道など)を示すデータ、幅員、規制(例えば、一方通行)、車線数などのデータを含んでいる。
【0023】
データ通信制御部32は、通信機能を内蔵するものでも良いし、携帯通信端末などを接続するものであってもよい。データ通信制御部32は、インターネット等のネットワークに接続し、所望のウエブサイトまたはサーバなどから、道路交通情報などに関する情報を取得することができる。
【0024】
プログラムメモリ60は、記憶装置30に記憶されたプログラムをロードする。例えば、GPS受信機10や自立航法用センサ12の測位結果に基づき自車位置を更新する自車位置更新プログラム62、自立航法用センサの車速パルスを利用することができるか否かを判定する車速パルスレス判定プログラム64、マップマッチング処理を行うプログラム66、自車位置をディスプレイに表示する自車位置表示プログラム68等を格納する。データメモリ70は、GPS受信機10や自立航法用センサ12により測位された距離や方位の測位データ72、記憶装置30から読み出された自車位置に対応する地図データ74、ルート探索された経路データ76等を記憶する。
【0025】
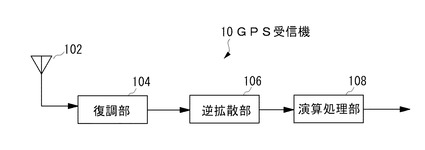
図2は、GPS受信機10の構成を示すブロック図である。GPS受信機10は、GPS衛星からの電波を受信するためのアンテナ102、アンテナ102からの信号を増幅したり、ベースバンド信号に復調などを行う復調部104、復調された信号にGPS衛星に固有のPN符号を乗算して逆拡散し、衛星信号との同期をとる逆拡散部106、逆拡散された衛星信号に基づき自車位置および自車方位を測位する演算処理部108を有している。
【0026】
演算処理部108は、3機または4機のGPS衛星を利用し、GPS受信機からGPS衛星までの擬似距離を算出し、この擬似距離から二次元的または三次元的な位置を検出する。演算処理部108は、1秒間隔で、自車の絶対位置(緯度、経度)および方位を算出し、これを制御部80へ出力する。
【0027】
次に、本実施例のナビゲーション装置の動作について図3および図4のフローチャートを参照して説明する。ここでは、特に自車位置の更新を中心に説明する。自車位置の更新は、上記したプログラムメモリ60に格納された自車位置更新プログラム62、車速パルスレス判定プログラム64、マップマッチング処理プログラム66等に従い制御部80が実行する。
【0028】
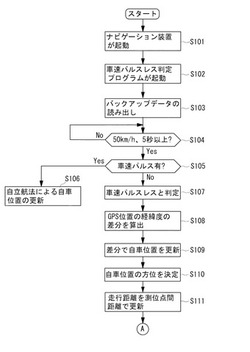
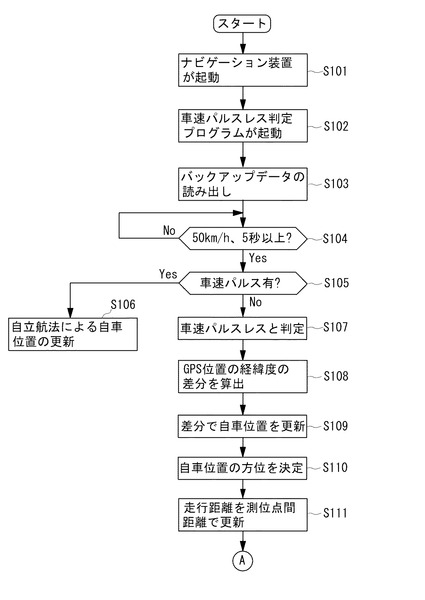
ナビゲーション装置が起動されると(ステップS101)、これに応答して車速パルスレス判定用のプログラム64が起動される(ステップS102)。車速パルスレス判定プログラム64に従い、制御部80は、イグニッションスイッチのオンしたときから、一定時間(例えば、500ms)は、車速パルスレスの判定は行わない。この期間は、イグニッションノイズが含まれることがあるためである。
【0029】
また制御部80は、記憶装置30に記憶されている自車位置のバックアップデータを読み出す(ステップS103)。バックアップデータは、ナビゲーション装置の使用が停止されたとき、または車両のイグニッションスイッチがオフされたときの自車位置および自車方位である。この位置が、最初の自車位置となる。
【0030】
自車の走行が開始されると、制御部80は、GPS受信機10による測位からGPS速度が50km/h以上であり、かつその状態が5秒以上連続しているか否かを判定する(ステップS104)。その状態が連続している場合には、制御部80は、車速パルスレス判定、すなわち、その間に自立航法用センサから車速パルス信号が入力されているか否かを判定する(ステップS105)。車速パルス信号があるときは、制御部80は、自立航法をメインとする自車位置の更新を行う(ステップS06)。自立航法では、車速パルスからの距離情報とジャイロセンサからの方位情報のベクトルを現在の自車位置に合成し、自車位置の更新を行う。
【0031】
一方、車速パルス信号を得ることができないとき、車速パルスレスと判定する(ステップS107)。車速パルスレスの状態は、車速パルスを利用することができないとき、あるいは、車両がフェリー等に搭載され、絶対位置は移動するが相対位置が移動しないような場合である。
【0032】
車速パルスレスの状態は、自立航法による自車位置の更新が事実上不可能となることを意味する。従って、制御部80は、車速パルスレスと判定した場合には、GPS受信機10による測位データを用いて自車位置の更新を行う。
【0033】
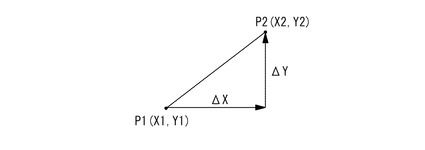
制御部80は、GPS受信機10からのGPS位置に基づき、前回のGPS位置と今回のGPS位置との経緯度の差分を算出する(ステップS108)。算出された差分を自車位置に加算し、自車位置を更新する(ステップS109)。図4は、GPS位置により自車位置が更新される例を説明する。仮に、現在の自車位置がP1(X1、Y1)であるとする。GPS位置による経緯度の変化量をΔX、ΔYとする。更新された自車位置P2(X2、Y2)は、変化量ΔX、ΔYのベクトル合成である。
【0034】
次に、制御部80は、更新された自車位置P2の方位を決定する(ステップS110)。GPS速度が5km/h以上のときは、GPS方位を自車方位とし、GPS速度が5km/h未満のときはジャイロ方位を自車方位とする。もしくは、ジャイロなしのシステムであれば、前回のGPS方位を継続させる。GPSの測位方位は、低速時のときに誤差が大きいため、ジャイロ方位を優先し、一定の速度以上のときにGPSの測位方位を採用する。
【0035】
次に、制御部80は、自車の走行距離をGPS測位による測位点間距離で更新する(ステップS111)。測位点間距離は、GPS測位の経緯度の差分と実質的に等しいが、ナビゲーション装置において距離情報を必要とする場合には、この距離を用いることができる。
【0036】
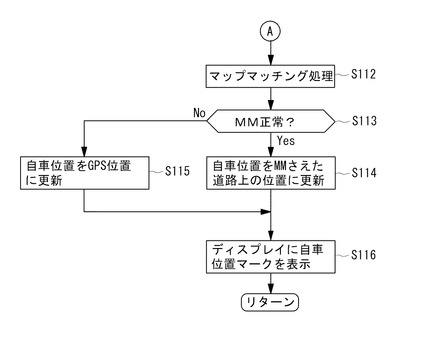
次に、制御部80は、GPS位置の変化量で更新された自車位置について投影法によるマップマッチング処理を行う(ステップS112)。マップマッチング処理は、上記図8で示したように、自車位置から道路(リンク)までの垂線の距離、自車の方位、および当該道路との接続性をパラメータに用い、それらの統合したものが一定の条件を満足している場合に、その道路にマップマッチングされる。
【0037】
マップマッチングが正常に行われた場合には(ステップS113)、自車位置は、マップマッチングされた地図データ上の道路の位置に更新される(ステップS114)。一方、マップマッチングする条件を満足する道路が見つからないとき、一定の時間(例えば5秒間)を経過してもマッチング候補となる道路が見つからないとき、あるいはマップマッチングされた位置がGPS位置の誤差円半径の範囲内に入らないとき、制御部80は、マップマッチングが正常に行うことができないと判定し(ステップS113)、自車位置をGPS位置に更新する(ステップS115)。
【0038】
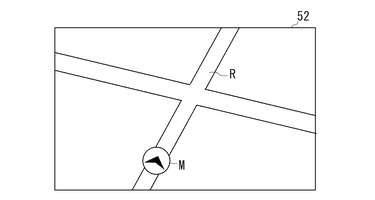
制御部80は、マップマッチングにより更新された自車位置および方位に従い、図6に示すように、ディスプレイ52の道路R上に、自車位置マークMを表示する(ステップS116)。このとき、自車位置マークMは、GPS方位または自立航法センサの方位に従い、道路Rの進行方向と合致する方向に表示される。
【0039】
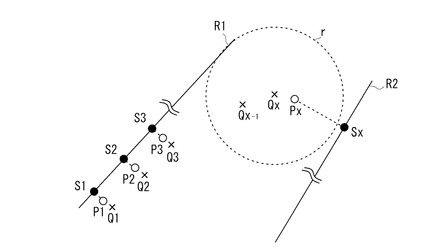
図7は、本実施例による自車位置更新の例を示している。同図において、白丸で示す点P1〜Pnは、GPS位置により更新された自車位置を示し、×で示す点Q1〜Qnは、GPS位置を示し、黒丸で示す点S1〜Snは、マップマッチングされた位置を示している。
【0040】
自車位置P1が道路R1上にマップマッチングされ、自車位置S1に更新される。そして、GPS位置Q1とQ2の変化量が自車位置S1に加算されて自車位置P2に更新される。次に、自車位置P2は、道路R1にマップマッチングされて自車位置S2に更新される。次に、GPS位置Q2とQ3の経緯度の変化量が自車位置S2に加算されて自車位置P3に更新され、マップマッチングにより自車位置S3に更新される。このように、正しい道路上の自車位置に、GPS位置の差分を足し込むことで、正しい道路付近が新しい自車位置になる。この位置を基準にマップマッチングするため、正しい道路にマップマッチングする確率が高くなる。その結果、GPS誤差が大きい状態でもミスマッチしづらく間違った自車位置表示や間違った案内をすることが少なくなる。
【0041】
また、GPS位置がマルチパスや遮蔽物等の影響により精度が悪化したとき、例えば、GPS位置がQxのように道路R1から離れると、自車位置Pxも道路R1から離れ、マップマッチングのときに道路R2にミスマッチされるおそれがある。道路R2上にマップマッチされた位置Sxが、GPS位置Qxの誤差円半径rの内側になければ、マッチングが正常でないと判定し、自位位置は、GPS位置Qxに修正される。これにより、ミスマッチする頻度を低減することができる。
【0042】
以上、本発明の好ましい実施の形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例では、自車位置更新の動作をプログラムによる制御としたが、必ずしもこれに限らず、ハードウエハ回路によって実行するようにしてもよい。さらに、ナビゲーション装置は、他のオーディオ装置やビデオ装置と複合的なものであっても良い。
【産業上の利用可能性】
【0043】
本発明に係るナビゲーション装置は、車両等に搭載されるナビゲーション装置、ナビゲーションシステム、あるいはナビゲーション機能を包含するコンピュータ等の電子装置において利用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。
【図2】GPS受信機の構成を示すブロック図である。
【図3】本実施例のナビゲーション装置の動作を説明するフローチャートである。
【図4】本実施例のナビゲーション装置の動作を説明するフローチャートである。
【図5】GPS位置による自車位置の更新を説明する図である。
【図6】自車位置マークの表示例を示す図である。
【図7】本実施例における自車位置更新の例を説明する図である。
【図8】従来の投影法によるマップマッチング処理を説明する図である。
【符号の説明】
【0045】
1:ナビゲーション装置 10:GPS受信機
20:ユーザーインターフェース 30:記憶装置
40:音声出力部 50:表示制御部
52:ディスプレイ 60:プログラムメモリ
70:データメモリ 80:制御部
【技術分野】
【0001】
本発明は、車両等の移動体に搭載されるナビゲーション装置に関し、特に、自立航法用センサの距離情報を利用できないときの自車位置の更新方法に関する。
【背景技術】
【0002】
ナビゲーション装置は、自車位置を検出し、自車位置周辺の地図データをディスプレイに描画するとともに、地図上に車両マークを重ねて表示し、自車位置が変化すると、それに併せて地図をスクロールさせ道路地図を案内する機能を有している。また、目的地までの最適経路を探索し、探索された経路をディスプレイに表示し、同時に、探索経路による目的地までの到着時刻等を併せて表示している。
【0003】
ナビゲーション装置には、車両に搭載された距離センサや方位センサから自車位置を算出する自立航法と、衛星を利用したGPS測位により自車位置を算出する方法が実用化されている。自立航法用の距離センサは、例えば車速パルスを利用したものがあり、車速パルスは、車両が一定の距離を走行するたびにパルス信号を出力する。また、方位センサは、例えばジャイロセンサが利用されている。自立航法による自車位置の算出または更新は、距離センサにより得られた移動距離と方位センサにより得られた移動方向のベクトルを合成することにより計算される。
【0004】
自立航法は、比較的簡単な構成で自車位置を算出することができるが、相対的な位置検出であるため、高精度な位置測位を行うことが難しい。すなわち、自車が走行するにつれ誤差が累積し、自車位置の精度が悪化する。この精度の悪化を補償するために、地図データベースに含まれる道路(リンク)データを利用した、いわゆるマップマッチング処理が行われている。リンクデータは、道路の緯度、経度情報を含むものであり、自立航法により算出された自車位置を、リンクデータに照合させることで、自車位置の校正または修正を行っている。
【0005】
マップマッチング処理は、例えば特許文献1に開示されている。これによれば、第1のマップマッチング方法は、走行軌跡(所定走行距離毎の位置と方位)を保存しておき、該走行軌跡と同形の地図上の道路を求め、該道路上のポイントに車両位置マークをマップマッチングさせる方法(パターンマッチング)である。第2のマップマッチング方法は投影法による方法である。
【0006】
図8は投影法によるマップマッチングの説明図である。自車位置が点P1にあり、そこから距離L1、相対方位θ1だけ走行したときの自立航法による自車位置をP2とする。このとき、自車位置P2から垂線を降ろすことのできる道路(リンク)であって、自車位置P2での車両方位とリンクの成す角度が一定値以内で、かつ、自車位置P2からリンクに降ろした垂線の長さが一定距離以内となっているものを探す。ここでは道路1と道路2が探されたものとする。そして、自車位置P2から道路1、2に降ろした垂線の長さを求め、短い方のリンクをマッチング候補とする。ここでは道路1とする。そして、自車位置P1と自車位置P2を結ぶ走行軌跡Sを垂線の方向に平行移動し、道路1との交点Tを求め、交点Tを中心に道路1に来るまで走行軌跡Sを回転移動し、マップマッチングされた車両位置P3を得る。
【0007】
一方、GPS測位は、地球を周回する複数のGPS衛星の距離を測位し、3角測量の原理で車両位置を計算する。1回の位置測定に4個の衛星を使って3次元位置(経度、緯度、高度)を測定する3次元測位と、3つの衛星を使って2次元位置(経度、緯度)を測定する2次元測位がある。GPS測位は、絶対位置を検出することができるが、その精度は、電波受信状況に影響されやすく、常に精度が良いとは限らない。
【0008】
特許文献2は、電子地図とGPSレシーバを使用するオブジェクトの追跡システムに関し、GPS測位による精度の信頼性が高いときに、自車位置をGPS位置に更新している。すなわち、GPSレシーバは、複数の衛星からデータを受け取り、GPS導出位置と速度を決定する。オブジェクトの前の位置、GPS導出位置、速度、DOP、データが得られた衛星の連続性に基づいてシステムは、GPSデータが信頼できるか否か決定する。GPSデータが信頼できる場合、オブジェクトの前の位置は、GPS導出位置に更新される。更新された位置は、次いで地図の道路に一致される。
【0009】
【特許文献1】特開平6−337217号
【特許文献2】特表2001−509883号
【発明の開示】
【発明が解決しようとする課題】
【0010】
ナビゲーション装置を後から車両に取り付けるような場合、自立航法用の車速パルスを取得することができない場合がある。また、車両のエンジンをかけたままフェリーなどにより河川を移動するとき、車速パルスを利用することができな場合がある。車速パルスを取得できない状況または利用できない状況では、自立航法ができないため、GPS測位による情報をメインにした自車位置更新を行う必要がある。
【0011】
GPS測位のオープンスペースでの位置精度は、約10m(2DRMS)と言われているが、実際に遮蔽物や反射物が周辺に存在する環境では、場合によっては1km以上の測位誤差が発生することがある。このため、道路データベース上の位置を利用したマップマッチングを行うことで位置精度の補償をすることも可能であるが、GPS誤差が大きすぎると、誤ったマップマッチングとなり、間違った自車位置を表示したり、間違った案内をしてしまうという課題がある。
【0012】
本発明は、上記従来の課題を解決し、自立航法用センサからの距離情報を利用できない場合であっても、GPS測位情報に基づき自車位置を精度良く算出することができるナビゲーション装置および自車位置の更新方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明に係るナビゲーション装置では、自立航法用センサから距離情報、例えば、車速パルスレスの時、GPS測位情報による得られたGPS位置の変化量を自車位置に足しこんでいくことで、徐々に大きくなるGPS誤差の影響を抑えた自車位置の更新を行う。
【0014】
本発明に係る、自立航法用センサおよびGPS測位情報に基づき自車位置を算出し、算出された自車位置を道路地図上に表示するナビゲーション装置は、GPS測位情報から自車速度が一定値以上であって、かつ一定時間を継続しているとき、自立航法用センサから距離情報を利用可能であるか否かを判定する判定手段と、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報により得られた前回の経緯度と今回の経緯度との差分を算出し、当該差分により自車位置を更新する第1の更新手段とを有する。
【0015】
好ましくはナビゲーション装置はさらに、第1の更新手段により更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新手段を有する。また、第2の更新手段は、一定の条件を満足する道路候補が見つからないとき、一定の時間内にマップマッチングすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS位置に更新する。
【0016】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法用センサによる方位を自車方位とする方位決定手段と、当該自車方位に応じて自車位置マークをディスプレイに表示する表示手段とを有する。
【0017】
好ましくは、判定手段は、ナビゲーション装置が起動されてから一定時間経過後に車速パルスの有無をチェックし、車速パルスがないとき自立航法用センサの距離情報を利用することができないと判定する。起動直後には、信号にノイズが含まれることがあり、これを誤って検出しないようにするためである。
【0018】
本発明に係るナビゲーション装置における自車位置の更新方法は、自立航法用センサによる距離情報を利用可能か否かを判定する判定ステップと、距離情報を利用することができないと判定したとき、GPS測位情報に基づくGPS位置の変化量により自車位置を更新する第1の更新ステップと、更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップとを有する。
【発明の効果】
【0019】
本発明によれば、自立航法用センサからの距離情報を利用することができないとき、GPS測位情報による位置情報の差分(変化量)により自車位置を更新するようにしたので、徐々に大きくなるGPS測位による誤差の影響を抑制することができる。また、GPS測位情報による位置精度が悪化しても、GPS測位情報による位置変化量をマップマッチされた自車位置に足しこむことにより、正しい道路付近が新しい自車位置になる。このため、正しい道路にマップマッチングする確率が高くなる。これにより、GPS測位による誤差が大きい状態でも、ミスマッチの発生が抑制され、間違った自車位置表示や間違った案内をすることが少なくなる。
【発明を実施するための最良の形態】
【0020】
本発明の最良の実施の形態について図面を参照して詳細に説明する。
【実施例】
【0021】
図1は、本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。同図に示すように、ナビゲーション装置1は、GPS衛星からの電波を受信して車両の現在位置と現在方位を測位するGPS受信機10、車速パスルやジャイロセンサを含む自立航法用センサ12、アンテナ14を介して車両外部の現在の道路交通情報を受信するVICS(Vehicle Information and Communication System)・FM多重レシーバ16、操作パネル22、音声入力部24およびリモコン操作部26を含むユーザー入力インターフェース20、大容量のハードディスクを有する記憶装置30、無線または有線によりデータ通信を可能とするデータ通信制御部32、スピーカ42から音声を出力させる音声出力部40、ディスプレイ52に画像を表示させる表示制御部50、プログラムを記憶するプログラムメモリ60、データを一時記憶するデータメモリ70、および制御部80を含んでいる。
【0022】
記憶装置30は、ナビゲーションの各種機能を実行するためのプログラムおよびデータベースを記憶する。プログラムは、目的地までのルート探索、目的地までの到着予定時刻算出、ルート案内などナビゲーションに必要な機能を含んでいる。データベースは、地図データ、施設データ等を含み、地図データは、道路に関するリンク(道路)データおよび交差点データを含む。リンクデータは、交差点と交差点とを連結する道路に関するデータであり、道路の始点と終点の経緯度を示すノードデータ、道路の種別(国道、一般道、県道など)を示すデータ、幅員、規制(例えば、一方通行)、車線数などのデータを含んでいる。
【0023】
データ通信制御部32は、通信機能を内蔵するものでも良いし、携帯通信端末などを接続するものであってもよい。データ通信制御部32は、インターネット等のネットワークに接続し、所望のウエブサイトまたはサーバなどから、道路交通情報などに関する情報を取得することができる。
【0024】
プログラムメモリ60は、記憶装置30に記憶されたプログラムをロードする。例えば、GPS受信機10や自立航法用センサ12の測位結果に基づき自車位置を更新する自車位置更新プログラム62、自立航法用センサの車速パルスを利用することができるか否かを判定する車速パルスレス判定プログラム64、マップマッチング処理を行うプログラム66、自車位置をディスプレイに表示する自車位置表示プログラム68等を格納する。データメモリ70は、GPS受信機10や自立航法用センサ12により測位された距離や方位の測位データ72、記憶装置30から読み出された自車位置に対応する地図データ74、ルート探索された経路データ76等を記憶する。
【0025】
図2は、GPS受信機10の構成を示すブロック図である。GPS受信機10は、GPS衛星からの電波を受信するためのアンテナ102、アンテナ102からの信号を増幅したり、ベースバンド信号に復調などを行う復調部104、復調された信号にGPS衛星に固有のPN符号を乗算して逆拡散し、衛星信号との同期をとる逆拡散部106、逆拡散された衛星信号に基づき自車位置および自車方位を測位する演算処理部108を有している。
【0026】
演算処理部108は、3機または4機のGPS衛星を利用し、GPS受信機からGPS衛星までの擬似距離を算出し、この擬似距離から二次元的または三次元的な位置を検出する。演算処理部108は、1秒間隔で、自車の絶対位置(緯度、経度)および方位を算出し、これを制御部80へ出力する。
【0027】
次に、本実施例のナビゲーション装置の動作について図3および図4のフローチャートを参照して説明する。ここでは、特に自車位置の更新を中心に説明する。自車位置の更新は、上記したプログラムメモリ60に格納された自車位置更新プログラム62、車速パルスレス判定プログラム64、マップマッチング処理プログラム66等に従い制御部80が実行する。
【0028】
ナビゲーション装置が起動されると(ステップS101)、これに応答して車速パルスレス判定用のプログラム64が起動される(ステップS102)。車速パルスレス判定プログラム64に従い、制御部80は、イグニッションスイッチのオンしたときから、一定時間(例えば、500ms)は、車速パルスレスの判定は行わない。この期間は、イグニッションノイズが含まれることがあるためである。
【0029】
また制御部80は、記憶装置30に記憶されている自車位置のバックアップデータを読み出す(ステップS103)。バックアップデータは、ナビゲーション装置の使用が停止されたとき、または車両のイグニッションスイッチがオフされたときの自車位置および自車方位である。この位置が、最初の自車位置となる。
【0030】
自車の走行が開始されると、制御部80は、GPS受信機10による測位からGPS速度が50km/h以上であり、かつその状態が5秒以上連続しているか否かを判定する(ステップS104)。その状態が連続している場合には、制御部80は、車速パルスレス判定、すなわち、その間に自立航法用センサから車速パルス信号が入力されているか否かを判定する(ステップS105)。車速パルス信号があるときは、制御部80は、自立航法をメインとする自車位置の更新を行う(ステップS06)。自立航法では、車速パルスからの距離情報とジャイロセンサからの方位情報のベクトルを現在の自車位置に合成し、自車位置の更新を行う。
【0031】
一方、車速パルス信号を得ることができないとき、車速パルスレスと判定する(ステップS107)。車速パルスレスの状態は、車速パルスを利用することができないとき、あるいは、車両がフェリー等に搭載され、絶対位置は移動するが相対位置が移動しないような場合である。
【0032】
車速パルスレスの状態は、自立航法による自車位置の更新が事実上不可能となることを意味する。従って、制御部80は、車速パルスレスと判定した場合には、GPS受信機10による測位データを用いて自車位置の更新を行う。
【0033】
制御部80は、GPS受信機10からのGPS位置に基づき、前回のGPS位置と今回のGPS位置との経緯度の差分を算出する(ステップS108)。算出された差分を自車位置に加算し、自車位置を更新する(ステップS109)。図4は、GPS位置により自車位置が更新される例を説明する。仮に、現在の自車位置がP1(X1、Y1)であるとする。GPS位置による経緯度の変化量をΔX、ΔYとする。更新された自車位置P2(X2、Y2)は、変化量ΔX、ΔYのベクトル合成である。
【0034】
次に、制御部80は、更新された自車位置P2の方位を決定する(ステップS110)。GPS速度が5km/h以上のときは、GPS方位を自車方位とし、GPS速度が5km/h未満のときはジャイロ方位を自車方位とする。もしくは、ジャイロなしのシステムであれば、前回のGPS方位を継続させる。GPSの測位方位は、低速時のときに誤差が大きいため、ジャイロ方位を優先し、一定の速度以上のときにGPSの測位方位を採用する。
【0035】
次に、制御部80は、自車の走行距離をGPS測位による測位点間距離で更新する(ステップS111)。測位点間距離は、GPS測位の経緯度の差分と実質的に等しいが、ナビゲーション装置において距離情報を必要とする場合には、この距離を用いることができる。
【0036】
次に、制御部80は、GPS位置の変化量で更新された自車位置について投影法によるマップマッチング処理を行う(ステップS112)。マップマッチング処理は、上記図8で示したように、自車位置から道路(リンク)までの垂線の距離、自車の方位、および当該道路との接続性をパラメータに用い、それらの統合したものが一定の条件を満足している場合に、その道路にマップマッチングされる。
【0037】
マップマッチングが正常に行われた場合には(ステップS113)、自車位置は、マップマッチングされた地図データ上の道路の位置に更新される(ステップS114)。一方、マップマッチングする条件を満足する道路が見つからないとき、一定の時間(例えば5秒間)を経過してもマッチング候補となる道路が見つからないとき、あるいはマップマッチングされた位置がGPS位置の誤差円半径の範囲内に入らないとき、制御部80は、マップマッチングが正常に行うことができないと判定し(ステップS113)、自車位置をGPS位置に更新する(ステップS115)。
【0038】
制御部80は、マップマッチングにより更新された自車位置および方位に従い、図6に示すように、ディスプレイ52の道路R上に、自車位置マークMを表示する(ステップS116)。このとき、自車位置マークMは、GPS方位または自立航法センサの方位に従い、道路Rの進行方向と合致する方向に表示される。
【0039】
図7は、本実施例による自車位置更新の例を示している。同図において、白丸で示す点P1〜Pnは、GPS位置により更新された自車位置を示し、×で示す点Q1〜Qnは、GPS位置を示し、黒丸で示す点S1〜Snは、マップマッチングされた位置を示している。
【0040】
自車位置P1が道路R1上にマップマッチングされ、自車位置S1に更新される。そして、GPS位置Q1とQ2の変化量が自車位置S1に加算されて自車位置P2に更新される。次に、自車位置P2は、道路R1にマップマッチングされて自車位置S2に更新される。次に、GPS位置Q2とQ3の経緯度の変化量が自車位置S2に加算されて自車位置P3に更新され、マップマッチングにより自車位置S3に更新される。このように、正しい道路上の自車位置に、GPS位置の差分を足し込むことで、正しい道路付近が新しい自車位置になる。この位置を基準にマップマッチングするため、正しい道路にマップマッチングする確率が高くなる。その結果、GPS誤差が大きい状態でもミスマッチしづらく間違った自車位置表示や間違った案内をすることが少なくなる。
【0041】
また、GPS位置がマルチパスや遮蔽物等の影響により精度が悪化したとき、例えば、GPS位置がQxのように道路R1から離れると、自車位置Pxも道路R1から離れ、マップマッチングのときに道路R2にミスマッチされるおそれがある。道路R2上にマップマッチされた位置Sxが、GPS位置Qxの誤差円半径rの内側になければ、マッチングが正常でないと判定し、自位位置は、GPS位置Qxに修正される。これにより、ミスマッチする頻度を低減することができる。
【0042】
以上、本発明の好ましい実施の形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例では、自車位置更新の動作をプログラムによる制御としたが、必ずしもこれに限らず、ハードウエハ回路によって実行するようにしてもよい。さらに、ナビゲーション装置は、他のオーディオ装置やビデオ装置と複合的なものであっても良い。
【産業上の利用可能性】
【0043】
本発明に係るナビゲーション装置は、車両等に搭載されるナビゲーション装置、ナビゲーションシステム、あるいはナビゲーション機能を包含するコンピュータ等の電子装置において利用することができる。
【図面の簡単な説明】
【0044】
【図1】本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。
【図2】GPS受信機の構成を示すブロック図である。
【図3】本実施例のナビゲーション装置の動作を説明するフローチャートである。
【図4】本実施例のナビゲーション装置の動作を説明するフローチャートである。
【図5】GPS位置による自車位置の更新を説明する図である。
【図6】自車位置マークの表示例を示す図である。
【図7】本実施例における自車位置更新の例を説明する図である。
【図8】従来の投影法によるマップマッチング処理を説明する図である。
【符号の説明】
【0045】
1:ナビゲーション装置 10:GPS受信機
20:ユーザーインターフェース 30:記憶装置
40:音声出力部 50:表示制御部
52:ディスプレイ 60:プログラムメモリ
70:データメモリ 80:制御部
【特許請求の範囲】
【請求項1】
自立航法用センサおよびGPS測位情報に基づき自車位置を算出し、算出された自車位置を道路地図上に表示するナビゲーション装置であって、
GPS測位情報に基づき自車速度が一定値以上であって、かつ一定時間を継続しているとき、自立航法用センサから距離情報を利用可能であるか否かを判定する判定手段と、
自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報により得られた前回の経緯度と今回の経緯度との差分を算出し、当該差分により自車位置を更新する第1の更新手段と、
を有するナビゲーション装置。
【請求項2】
ナビゲーション装置はさらに、第1の更新手段により更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新手段を有する、請求項1に記載のナビゲーション装置。
【請求項3】
第2の更新手段は、一定条件を満足する道路候補が見つからないとき、一定時間内にマップマッチングすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS測位情報に基づくGPS位置に更新する、請求項1または2に記載のナビゲーション装置。
【請求項4】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法用センサによる方位を自車方位とする方位決定手段と、当該自車方位に応じて自車位置マークをディスプレイに表示する表示手段とを有する、請求項1ないし3いずれか1つに記載のナビゲーション装置。
【請求項5】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、自車の走行距離をGPS測位情報に基づく測位点間距離で更新する距離更新手段を有する、請求項1ないし4いずれか1つに記載のナビゲーション装置。
【請求項6】
判定手段は、ナビゲーション装置が起動されてから一定時間経過後に車速パルス信号の有無をチェックし、車速パルス信号がないとき自立航法用センサによる距離情報を利用することができないと判定する、請請求項1ないし5いずれか1つに記載のナビゲーション装置。
【請求項7】
ナビゲーション装置はさらに、使用が停止されるとき、第1または第2の更新手段により更新された自車位置を記憶する記憶手段を有する、請求項1ないし6いずれか1つに記載のナビゲーション装置。
【請求項8】
ナビゲーション装置における自車位置の更新方法であって、
自立航法用センサによる距離情報を利用可能か否かを判定する判定ステップと、
距離情報を利用することができないと判定したとき、GPS測位情報に基づくGPS位置の変化量により自車位置を更新する第1の更新ステップと、
更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップと、
を有する自車位置の更新方法。
【請求項9】
自車位置の更新方法はさらに、一定条件を満足する道路候補が見つからないとき、一定時間内にマップマッチングをすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS測位情報に基づくGPS位置に更新する、請求項8に記載の自車位置の更新方法。
【請求項10】
自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法センサによる方位を自車方位とする方位決定ステップと、当該自車方位に応じて自車位置マークをディスプレイに表示する表示ステップとを有する、請求項8に記載の自車位置の更新方法。
【請求項11】
自車位置の更新方法はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、自車の走行距離をGPS測位による測位点間距離で更新する距離更新ステップを有する、請求項8に記載の自車位置の更新方法。
【請求項1】
自立航法用センサおよびGPS測位情報に基づき自車位置を算出し、算出された自車位置を道路地図上に表示するナビゲーション装置であって、
GPS測位情報に基づき自車速度が一定値以上であって、かつ一定時間を継続しているとき、自立航法用センサから距離情報を利用可能であるか否かを判定する判定手段と、
自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報により得られた前回の経緯度と今回の経緯度との差分を算出し、当該差分により自車位置を更新する第1の更新手段と、
を有するナビゲーション装置。
【請求項2】
ナビゲーション装置はさらに、第1の更新手段により更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新手段を有する、請求項1に記載のナビゲーション装置。
【請求項3】
第2の更新手段は、一定条件を満足する道路候補が見つからないとき、一定時間内にマップマッチングすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS測位情報に基づくGPS位置に更新する、請求項1または2に記載のナビゲーション装置。
【請求項4】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法用センサによる方位を自車方位とする方位決定手段と、当該自車方位に応じて自車位置マークをディスプレイに表示する表示手段とを有する、請求項1ないし3いずれか1つに記載のナビゲーション装置。
【請求項5】
ナビゲーション装置はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、自車の走行距離をGPS測位情報に基づく測位点間距離で更新する距離更新手段を有する、請求項1ないし4いずれか1つに記載のナビゲーション装置。
【請求項6】
判定手段は、ナビゲーション装置が起動されてから一定時間経過後に車速パルス信号の有無をチェックし、車速パルス信号がないとき自立航法用センサによる距離情報を利用することができないと判定する、請請求項1ないし5いずれか1つに記載のナビゲーション装置。
【請求項7】
ナビゲーション装置はさらに、使用が停止されるとき、第1または第2の更新手段により更新された自車位置を記憶する記憶手段を有する、請求項1ないし6いずれか1つに記載のナビゲーション装置。
【請求項8】
ナビゲーション装置における自車位置の更新方法であって、
自立航法用センサによる距離情報を利用可能か否かを判定する判定ステップと、
距離情報を利用することができないと判定したとき、GPS測位情報に基づくGPS位置の変化量により自車位置を更新する第1の更新ステップと、
更新された自車位置を地図データ上の道路にマップマッチングし、マップマッチングされた道路上の位置を自車位置に更新する第2の更新ステップと、
を有する自車位置の更新方法。
【請求項9】
自車位置の更新方法はさらに、一定条件を満足する道路候補が見つからないとき、一定時間内にマップマッチングをすることができないとき、またはマップマッチングされる位置がGPS測位情報に基づくGPS位置の誤差円の範囲外であるとき、自車位置をGPS測位情報に基づくGPS位置に更新する、請求項8に記載の自車位置の更新方法。
【請求項10】
自立航法用センサの距離情報を利用することができないと判定した場合、GPS測位情報に基づくGPS速度が一定値以上のときGPS方位を自車方位とし、一定値未満のとき自立航法センサによる方位を自車方位とする方位決定ステップと、当該自車方位に応じて自車位置マークをディスプレイに表示する表示ステップとを有する、請求項8に記載の自車位置の更新方法。
【請求項11】
自車位置の更新方法はさらに、自立航法用センサの距離情報を利用することができないと判定した場合、自車の走行距離をGPS測位による測位点間距離で更新する距離更新ステップを有する、請求項8に記載の自車位置の更新方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−24701(P2007−24701A)
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2005−208034(P2005−208034)
【出願日】平成17年7月19日(2005.7.19)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成17年7月19日(2005.7.19)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]