
ナビゲーション装置

【課題】 有用な案内情報を提示する。
【解決手段】 目的地推定部6は、現在の情報と、履歴データベース4に記憶されている履歴データと、地図データベース5に記憶されている地図データに基づき目的地候補を推定し、行動目的推定部7は、現在の情報と、地図データと、推定された目的地候補と、保持している行動目的推定テーブルに基づき使用者の行動目的を推定し、案内情報決定部8は推定された行動目的に基づき提示する案内情報を決定する。
【解決手段】 目的地推定部6は、現在の情報と、履歴データベース4に記憶されている履歴データと、地図データベース5に記憶されている地図データに基づき目的地候補を推定し、行動目的推定部7は、現在の情報と、地図データと、推定された目的地候補と、保持している行動目的推定テーブルに基づき使用者の行動目的を推定し、案内情報決定部8は推定された行動目的に基づき提示する案内情報を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば音声情報等の案内情報を出力するナビゲーション装置に関し、特に、複数の案内情報が同時に存在する場合において、使用者に真に必要な案内情報を規制的に優先的に出力するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来のナビゲーション装置では、近年、使用者の移動に伴って変化する現在位置をディスプレイ上に地図と共に表示し、現在位置から利用者の設定した目的地までの経路を計算して、経路案内を行うナビゲーション装置が知られており、特に車両においてその利用が増加している。
【0003】
初期のナビゲーション装置は、設定した目的地までの経路案内を行うだけであったが、最近では、使用者の目的に一致した案内情報を提示する技術が開示されている。例えば、特許文献1には、初めに運転者が行動目的を入力すると、この行動目的を満足する目的地の候補が表示され、次に運転者が目的地を選択すると、この選択された目的地の案内情報と目的地までの経路が表示される。例えば、行動目的としてデパートを入力すると、複数のデパートが表示され、デパートの表示がなされると、その売り出し情報が表示され、デパートまでの道順が地図上に表示される。
【0004】
しかしながら、こうしたナビゲーション装置では、使用者が行動目的を入力するためには、所定の行動目的設定手順に従う必要があり使用者にとって煩雑であった。そのため、使用者からの行動目的の入力がない場合でも、目的地を推測して出力する案内情報を変化させる方法が提案されている。例えば、特許文献2では、現在地と進行方向から予測目的エリアを推定し、推定されたエリア内の案内情報を出力する。また、特許文献3では、車両の停止位置と停止回数の履歴を保存しておき、停止したことのある地点の案内情報をより詳細に提示することや、停止回数の多い施設と同種の施設を自動的に検索して案内情報を提示することを提案している。
【0005】
【特許文献1】特公平6−16320号公報(問題点を解決するための手段の欄)
【特許文献2】特願2001−244112号公報(要約の解決手段の欄)
【特許文献3】特許3264206号公報(段落0006)
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来のナビゲーション装置は、以上のように構成されているので、上記特許文献2や上記特許文献3では、単純に目的地や車両の向かっている方向を行動目的と見なして関連する案内情報を出力しているだけで、使用者の行動目的を真に考慮しているとはいえず、例えば、目的地が駅前だとしても、行動目的としては、「駅前で人を送迎する」ことや、「駅前でショッピングする」こと等、多様なパターンが存在するため、このような状況で適切な案内情報を提示できないという課題があった。
【0007】
この発明は上記のような課題を解決するためになされたもので、使用者が行動目的を入力しなくても自動的に使用者の行動目的を推測し、使用者にとって有用な案内情報を提示することができるナビゲーション装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るナビゲーション装置は、過去の使用者の操作情報、過去の車両の位置情報、過去の車両に関する車両情報を履歴データとして記憶している履歴データベースと、地図データを記憶している地図データベースと、現在の使用者の操作情報、現在の車両の位置情報、現在の車両情報の何れかの現在の情報と、上記履歴データベースに記憶されている履歴データと、上記地図データベースに記憶されている地図データに基づき、目的地候補を推定する目的地推定部と、上記現在の情報と、上記地図データベースに記憶されている地図データと、上記目的地推定部により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する行動目的推定部と、該行動目的推定部により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する案内情報決定部とを備えたものである。
【発明の効果】
【0009】
この発明により、使用者の行動目的を入力しなくても、使用者の行動目的を考慮した使用者にとって有用な案内情報を提示することができるという効果が得られる。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
この発明を説明する前に、以下で使用する用語を次のように定義する。
「目的地」とは使用者が車両を使用して到達しようとしている地点を指し、「行動目的」とは使用者が目的地において行おうと予定している行動を指し、「ワンドライブ」とはエンジンを入れてから切るまでの一連の運転を指している。
【0011】
図1はこの発明の実施の形態1によるナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、入力部1、位置情報取得部2、車両情報取得部3、履歴データベース4、地図データベース5、目的地推定部6、行動目的推定部7、案内情報決定部8、ナビゲーション制御部9及び出力部10を備えている。
【0012】
入力部1は、リモートコントローラ、タッチパネル、音声認識装置等から構成されており、ユーザである運転者又は同乗者(以下、使用者と記述)が目的地を入力したり、ナビゲーション装置が提供する情報を選択するために使用される。
【0013】
位置情報取得部2は車両の現在位置を取得する。この位置情報取得部2は、例えばGPS(Global Positioning System)、FM多重放送によって提供される誤差情報を用いてGPSによる測位結果を補正するD−GPS(Differential GPS)、他の人工衛星を用いた測位方式、道路に設置された光ビーコンや電波ビーコンから供給される位置情報を用いる方式、車両の進行方向と走行距離から位置を得る自律航法、車両は道路上を走行するといった制約条件に基づき地図データベース5に登録されている道路の位置へ車両位置を補正するマップマッチング方式等、多様な位置検出方式を1つ又は複数組合せて実現することができる。
【0014】
車両情報取得部3は車両に関する車両情報を取得する。この車両情報としては、例えば、各種ECU(Electronic Control Unit)やETACS(Electronic Timer & Alarm Control System)等の車両コントロールシステム、コラムスイッチ等の各種スイッチ、ハンドル角センサ、車内やトランク内に設置された加圧センサや重量センサといった車両内の状態を取得する装置を1つ又は複数組み合わせて得られる情報や、バッテリ電圧、エンジン水温、油温、エンジン制御、AT制御、ACC(Adaptive Cruise Control)、パワーステアリング等のパワートレイン系の情報や、エアバッグ、ABS等の安全系の情報や、ドアや窓、トランクの開閉状態やロック状態、ミラーの状態、ウィンカの状態、ワイパの状態、ライトの向きや点灯状態等のボディ系の情報や、アクセル開度、ブレーキ開度、ジャイロが指す方角、サスペンション状態、ステアリング状態、燃料残量、排気量、トルク配分、ハンドル角度、ハンドル角速度、シフトレバー位置、現行シフト段、ターンインジケータ状態、シートベルトインジケータ状態等のシャーシ系の情報、走行距離、乗員数、車速、メータ表示車速、加速度、車輪速等の走行情報が含まれる。
【0015】
これ以外にも、車両情報としては、カメラ等の画像取得装置から取得した画像を画像認識する方式や、レーザ等の形状把握装置、重量センサや加圧センサといった圧力センサ、物体がICタグ等の個体識別が可能な装置を搭載し、車両側にICカードリーダといった個体識別装置取り付ける方式といった乗員・物体識別手法を一つ又は複数組み合わせて使用して、座席やトランク内等の車内に存在する人物や物体の数や名前、位置情報といった個体情報も取得しても良い。特に、人物であれば住所や嗜好等の個人情報が取得できても良い。このように、車両情報取得部3が取得する情報を総称して車両情報と呼ぶ。
【0016】
履歴データベース4は、入力部1を通じて入力されたリモコン操作等の使用者の過去の操作情報と、位置情報検出装置2により取得された過去の車両の位置情報と、車両情報取得部3により取得された過去の車両情報とを、履歴データとして記憶し、目的地推定部6に必要とする履歴情報を渡す。
【0017】
地図データベース5は、二次元地図情報の他に、地盤や池、湖、山、谷等の地形、建物、道路や鉄道の高架やトンネルといった構造物等の形状をモデル化した3次元形状情報、さらに、これら三次元形状を構成する面の色やイメージに関するデータを加えた3次元景観情報、これら構造物や施設、観光名所の位置、名称や電話番号、住所等の施設情報を、地図データとして記憶している。
【0018】
目的地推定部6は、入力部1を通じて入力されたリモコン操作等の使用者の現在の操作情報、位置情報検出装置2により取得された現在の車両の位置情報、車両情報取得部3により取得された現在の車両情報の何れかの現在の情報と、履歴データベース4に記憶されている履歴データと、地図データベース5に記憶されている地図データを使用して目的地候補を推定する。目的地候補を推定する方式としては、例えば、利用者が入力した目的地をそのまま使用する方式や、上記特許文献3のように、停止回数から推定した利用者の嗜好に基づき、地図データから近隣の地点を検索する方式や、現在のワンドライブ中の走行経路と、それ以前の走行経路を比較して目的地を選択する方式等を、1つ又は複数組み合わせて使用する。
【0019】
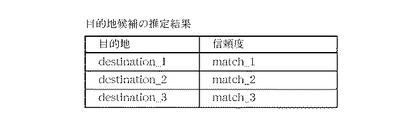
この現在のワンドライブ中の走行経路と、それ以前の走行経路を比較して目的地を選択する方式の場合、現在の走行経路の長さをl_now、現在の走行経路と一致した過去の走行経路nの走行経路の長さをl_nとしたときに、一致度match_nを次の式(1)により計算し、一致度match_nが最も高い過去の走行経路nの目的地destination_nを目的地候補として選択する。
match_n=l_n/l_now (1)
【0020】
図2は目的地推定部6による目的地候補の推定結果を示す図であり、例えば上記の一致度match_nを使用する方式において、match_nが高い走行経路k個の目的地を選択するといった方式で、目的地候補を複数としても良く、図2に示すように、更に一致度等を利用して信頼度を付加しても良い。ここで、目的地候補の信頼度は、上記一致度の他に、単なる順位付けをした数値で示しても良い。
【0021】
行動目的推定部7は、入力部1を通じて入力された使用者の現在の操作情報、位置情報検出装置2により取得された現在の車両の位置情報、車両情報取得部3により取得された現在の車両情報の何れかの現在の情報と、地図データベース5に記憶されている周辺の地図データと、目的地推定部6により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する。この行動目的の推定方法に関しては後述する。
【0022】
案内情報決定部8は、行動目的推定部7により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する。例えば、行動目的がショッピングであった場合には、提示情報決定部7は、新しく開店した店舗の情報や経路情報等を提示したり、行動目的が電車に乗ることであった場合には、電車の時刻表や運行状況を提示する。
【0023】
ナビゲーション制御部9は、位置情報取得部2により取得された現在の車両の位置情報と、車両情報取得部3により取得された車両情報を使用して、使用者が入力部1を介して入力した目的地に応じて誘導経路を計算したり、誘導経路に応じて使用者への案内情報を生成するといったナビゲーション装置が持つ、運転者を目的地に誘導するための基本的な機能を提供するために必要なデータ処理を行う他、車両位置や目的地、目的経路に関連する交通情報や観光地、飲食店や物販店等の情報の検索、使用者が入力した条件にマッチした施設の検索といったデータ処理を行う。また、ナビゲーション制御部9は、案内情報決定部8により決定された案内情報を受け取り、現在の画面状態等に従って案内情報を出力するタイミングや画面上の出力位置等を制御する。
【0024】
出力部10は、ディスプレイによる画面表示やスピーカを使用した音声出力といった出力手段を通じて、ナビゲーション制御部9の制御に基づき案内情報を使用者に提示する。
【0025】
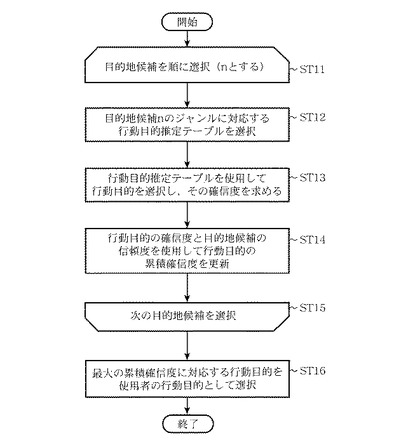
図3は行動目的推定部7の処理手順を示すフローチャートである。ここでは、車両情報取得部3が取得する車両情報として、乗員数と荷物の種類のみを取得した場合について説明する。また、目的地候補としては、図2に示すように、走行経路の一致度match_nを使用する方式で得られた複数の目的地候補を使用する。
【0026】
図3のステップST11〜ST15において、行動目的推定部7は目的地候補毎の行動目的を選択し、選択した行動目的の確信度を計算する。ステップST11において、行動目的推定部7は目的地候補nを選択する。ステップST12において、行動目的推定部7は、地図データベース5を検索して目的地推定部6により推定された目的地候補nのジャンルを抽出し、保持している行動目的推定テーブルの中から抽出したジャンルに対応する行動目的推定テーブルを選択する。
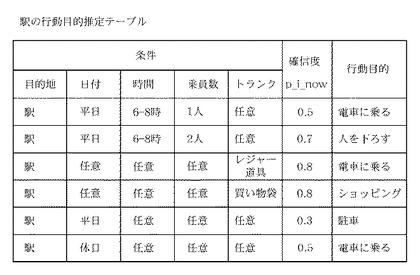
図4は行動目的推定部7が保持する駅の行動目的推定テーブルの例を示す図である。例えば、目的地候補のジャンルが駅であれば、行動目的推定部7は、図4に示すような駅の行動目的推定テーブルを選択する。
【0027】
ステップST13において、行動目的推定部7は、上記ステップST12で選択した駅の行動目的推定テーブルに書かれた目的地や車両情報等の各条件と、車両情報取得部3により取得した現在の乗員数と荷物のデータとが一致するかどうかを調べ、一致する条件があればそれに応じた行動目的を選択し、選択した行動目的の確信度p_i_nowを求める。一致する条件が複数存在する場合には、確信度p_i_nowが高い方を優先する。図4では、行動目的の確信度p_i_nowは予め定められているパラメータであるが、使用者やナビゲーション装置によって任意に変更しても良いし、例えば目的地や車両情報等の各条件jに係数w_jを持たせておき、次の式(2)により行動目的の確信度p_i_nowを算出しても良い。
p_i_now=Σ(w_j×1) 条件jと現在のデータが一致の場合
=Σ(w_j×0) それ以外 (2)
【0028】
ステップST14において、行動目的推定部7は、求めた行動目的の確信度p_i_nowと目的地候補の信頼度(現在の例では走行経路の一致度match_n)を使用して、次の式(3)により行動目的の累積確信度p_iを更新する。
p_i=p_i+p_i_now×match_n (3)
【0029】
ステップST15において、行動目的推定部7は、次の目的地候補を選択し、上記ステップST12〜ST14を繰り返す。ステップST16において、行動目的推定部7は、最終的に最大の累積確信度max(p_i)に対応する行動目的を、使用者の行動目的として選択して提示情報決定部8に出力する。このとき、行動目的推定部7は、選択した行動目的に、累積確信度p_iを付け加えても良い。
【0030】
以上のように、この実施の形態1によれば、目的地推定部6が現在の情報と履歴データと地図データに基づき目的地候補を推定し、行動目的推定部7が現在の情報と地図データと目的地候補と行動目的推定テーブルに基づき使用者の行動目的を推定することにより、使用者の行動目的を入力しなくても、使用者の行動目的を考慮した使用者にとって有用な案内情報を提示することができるという効果が得られる。
【0031】
実施の形態2.
この発明の実施の形態2によるナビゲーション装置の構成を示すブロック図は上記実施の形態1の図1と同じである。この実施の形態2では、使用者への案内情報を提示後に、行動目的推定部7が入力部1や位置情報取得部2や車両情報取得部3から各種情報を受け取り、現在のワンドライブ中で以前に推定した行動目的に対応する使用者への案内情報に対する使用者の反応を考慮して、行動目的の次の推定を行うことが特徴である。
【0032】
図5は行動目的推定部7及び案内情報決定部8の処理手順を示すフローチャートである。ステップST21において、行動目的推定部7は、現在のワンドライブ中に、案内情報決定部8、ナビゲーション制御部9及び出力部10を介して、使用者に対して既に何らかの案内情報を提示したことがあるかどうかを判断する。案内情報の提示を行っていない場合には、ステップST22に移り、上記の実施の形態1で述べた方式にしたがって行動目的を推定する。
【0033】
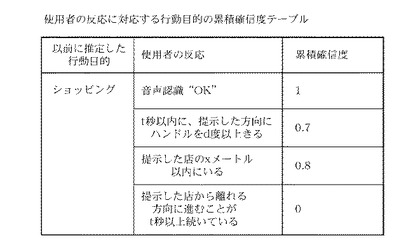
上記ステップST21で、既に何らかの案内情報の提示を行っていた場合は、ステップST23において、行動目的推定部7は、保持している使用者の反応に対応する推定した行動目的の累積確信度テーブルを使用して、以前に提示した案内情報と使用者の反応から、以前に推定した行動目的の累積確信度を求める。
図6は行動目的推定部7が保持する使用者の反応に対応する推定した行動目的の累積確信度テーブルの例を示す図である。この累積確信度テーブルでは、以前に推定した行動目的の累積確信度は予め固定されているが、例えばハンドルの角度から累積確信度を求める場合、案内情報を提示してからt秒経ったときに、ハンドルをd度回転させたとすると、次の式(4)により累積確信度を計算で求めるようにしても良い。
累積確信度=d/360/t (4)
【0034】
ステップST24において、行動目的推定部7は、上記ステップST23で求めた累積確信度と累積確信度のしきい値Xを比較し、以前に推定した行動目的が正しいか間違っているかを判断する。累積確信度のしきい値Xは、システム又は使用者が事前に定めておいても良いし、以前に推定した行動目的の累積確信度を使用するといった、その場で計算されても良い。求めた累積確信度がしきい値Xより大きければ、ステップST25に進み、以前に推定した行動目的を変化させず、そのままとする。
【0035】
求めた累積確信度がしきい値X以下であれば、ステップST26において、行動目的推定部7は、上記実施の形態1で述べた方式等により行動目的を再推定する。ただし、例えば、以前の行動目的がAで、再推定を行った場合もAが選択された場合には、確信度が2番目の行動目的を選択し、以前に選択した行動目的以外の行動目的が選択されるようにする。
【0036】
上記ステップST22,ST25,ST26で選択された行動目的は、次のステップST27に送られるが、このとき、累積確信度の値を付加しておいても良い。
【0037】
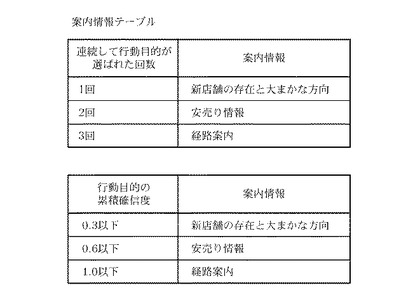
ステップST27において、案内情報決定部8は、上記ステップST22,ST25,ST26の何れかによる選択された行動目的を受け取り案内情報を決定するが、例えば、保持している案内情報テーブルにより、行動目的が選択された回数やその累積確信度に応じて提示する案内情報を決定する。
図7は案内情報決定部8が保持する案内情報テーブルの例を示す図である。案内情報決定部8は図7に示すテーブルを参照して提示する案内情報を決定する。
【0038】
ステップST28において、案内情報決定部8は、上記ステップST27で決定した案内情報を、ナビゲーション制御部9及び出力部10を介して使用者に提示する。ステップST29において、行動目的推定部7はハンドルの回転角といった車両情報や現在の位置情報等の変化により使用者の反応を取得し、ステップST21以降の次回の行動目的の推定と提示する案内情報の決定に使用する。
【0039】
以上のように、この実施の形態2によれば、行動目的推定部7が提示した行動目的に対する使用者の反応を考慮して次回の行動目的を推定し、案内情報決定部8が案内情報を決定することにより、使用者にとってより有用な案内情報を提示することができるという効果が得られる。
【0040】
実施の形態3.
図8はこの発明の実施の形態3によるナビゲーション装置の構成を示すブロック図である。図8に示すナビゲーション装置は、上記実施の形態1の図1に行動目的データベース11を追加し、行動目的推定部7が履歴データベース4からの履歴データを入力するように構成したもので、その他の構成は図1と同じである。図8において、行動目的データベース11は過去に推定された行動目的を記憶し、行動目的推定部7は、現在の情報と、履歴データベース4からの履歴データと、行動目的データベース11に記憶されている過去に推定された行動目的に基づき行動目的を推定し、推定した行動目的を行動目的データベース11に記憶する。
【0041】
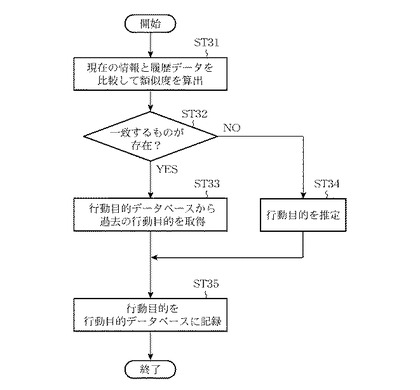
図9は行動目的推定部7の処理手順を示すフローチャートである。ステップST31において、行動目的推定部7は現在の情報と履歴データベース4に記憶されている履歴データを比較して類似度を算出する。例えば、行動目的推定部7は、現在の目的地や走行経路や車両情報と、履歴データベース4に記憶されている過去の目的地や走行経路や車両情報を比較して類似度を算出する。このとき、行動目的推定部7は、目的地のみの類似を検出する方法や,目的地と走行経路の類似を調べる方法や、あるいは、車両情報を検出して一致している項目数により類似度を判定する方法等を、1つ又は複数組み合わせて使用して類似度を算出する。
【0042】
ステップST32において、行動目的推定部7は、上記ステップST31で算出した類似度がしきい値Yを超えているか否かにより、現在と過去の目的地や走行経路や車両情報が一致しているか否かを判断する。
【0043】
一致する目的地や走行経路や車両情報が存在する場合に、ステップST33において、行動目的推定部7は、行動目的データベース11から過去の目的地や走行経路や車両情報に一致した行動目的を取得して、それを現在の行動目的と推定する。上記ステップST32で、一致するものが存在しない場合には、ステップST34において、上記実施の形態1又は上記実施の形態2と同様に行動目的を推定する。
【0044】
ステップST35において、行動目的推定部7は、上記ステップST33又は上記ステップST34で選択された行動目的を行動目的データベース11に記録する。
【0045】
以上のように、この実施の形態3によれば、行動目的推定部7が、現在の情報と、履歴データベース4からの履歴データと、行動目的データベース11に記憶されている過去に推定された行動目的に基づき行動目的を推定することにより、使用者が過去のドライブと似たドライブをしている場合に、行動目的推定の最初の段階から使用者の反応のフィードバックを考慮した行動目的を提示することができ、行動目的の推定の精度を高めることができるという効果が得られる。
【図面の簡単な説明】
【0046】
【図1】この発明の実施の形態1によるナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1によるナビゲーション装置の目的地推定部による目的地候補の推定結果を示す図である。
【図3】この発明の実施の形態1によるナビゲーション装置の行動目的推定部の処理手順を示すフローチャートである。
【図4】この発明の実施の形態1によるナビゲーション装置の行動目的推定部が保持する駅の行動目的推定テーブルの例を示す図である。
【図5】この発明の実施の形態2によるナビゲーション装置の行動目的推定部及び案内情報決定部の処理手順を示すフローチャートである。
【図6】この発明の実施の形態2によるナビゲーション装置の行動目的推定部が保持する使用者の反応に対応する推定した行動目的の累積確信度テーブルの例を示す図である。
【図7】この発明の実施の形態2によるナビゲーション装置の案内情報決定部が保持する案内情報テーブルの例を示す図である。
【図8】この発明の実施の形態3によるナビゲーション装置の構成を示すブロック図である。
【図9】この発明の実施の形態3によるナビゲーション装置の行動目的推定部の処理手順を示すフローチャートである。
【符号の説明】
【0047】
1 入力部、2 位置情報取得部、3 車両情報取得部、4 履歴データベース、5 地図データベース、6 目的地推定部6、7 行動目的推定部、8 案内情報決定部、9 ナビゲーション制御部、10 出力部、11 行動目的データベース。
【技術分野】
【0001】
この発明は、例えば音声情報等の案内情報を出力するナビゲーション装置に関し、特に、複数の案内情報が同時に存在する場合において、使用者に真に必要な案内情報を規制的に優先的に出力するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来のナビゲーション装置では、近年、使用者の移動に伴って変化する現在位置をディスプレイ上に地図と共に表示し、現在位置から利用者の設定した目的地までの経路を計算して、経路案内を行うナビゲーション装置が知られており、特に車両においてその利用が増加している。
【0003】
初期のナビゲーション装置は、設定した目的地までの経路案内を行うだけであったが、最近では、使用者の目的に一致した案内情報を提示する技術が開示されている。例えば、特許文献1には、初めに運転者が行動目的を入力すると、この行動目的を満足する目的地の候補が表示され、次に運転者が目的地を選択すると、この選択された目的地の案内情報と目的地までの経路が表示される。例えば、行動目的としてデパートを入力すると、複数のデパートが表示され、デパートの表示がなされると、その売り出し情報が表示され、デパートまでの道順が地図上に表示される。
【0004】
しかしながら、こうしたナビゲーション装置では、使用者が行動目的を入力するためには、所定の行動目的設定手順に従う必要があり使用者にとって煩雑であった。そのため、使用者からの行動目的の入力がない場合でも、目的地を推測して出力する案内情報を変化させる方法が提案されている。例えば、特許文献2では、現在地と進行方向から予測目的エリアを推定し、推定されたエリア内の案内情報を出力する。また、特許文献3では、車両の停止位置と停止回数の履歴を保存しておき、停止したことのある地点の案内情報をより詳細に提示することや、停止回数の多い施設と同種の施設を自動的に検索して案内情報を提示することを提案している。
【0005】
【特許文献1】特公平6−16320号公報(問題点を解決するための手段の欄)
【特許文献2】特願2001−244112号公報(要約の解決手段の欄)
【特許文献3】特許3264206号公報(段落0006)
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来のナビゲーション装置は、以上のように構成されているので、上記特許文献2や上記特許文献3では、単純に目的地や車両の向かっている方向を行動目的と見なして関連する案内情報を出力しているだけで、使用者の行動目的を真に考慮しているとはいえず、例えば、目的地が駅前だとしても、行動目的としては、「駅前で人を送迎する」ことや、「駅前でショッピングする」こと等、多様なパターンが存在するため、このような状況で適切な案内情報を提示できないという課題があった。
【0007】
この発明は上記のような課題を解決するためになされたもので、使用者が行動目的を入力しなくても自動的に使用者の行動目的を推測し、使用者にとって有用な案内情報を提示することができるナビゲーション装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るナビゲーション装置は、過去の使用者の操作情報、過去の車両の位置情報、過去の車両に関する車両情報を履歴データとして記憶している履歴データベースと、地図データを記憶している地図データベースと、現在の使用者の操作情報、現在の車両の位置情報、現在の車両情報の何れかの現在の情報と、上記履歴データベースに記憶されている履歴データと、上記地図データベースに記憶されている地図データに基づき、目的地候補を推定する目的地推定部と、上記現在の情報と、上記地図データベースに記憶されている地図データと、上記目的地推定部により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する行動目的推定部と、該行動目的推定部により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する案内情報決定部とを備えたものである。
【発明の効果】
【0009】
この発明により、使用者の行動目的を入力しなくても、使用者の行動目的を考慮した使用者にとって有用な案内情報を提示することができるという効果が得られる。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
この発明を説明する前に、以下で使用する用語を次のように定義する。
「目的地」とは使用者が車両を使用して到達しようとしている地点を指し、「行動目的」とは使用者が目的地において行おうと予定している行動を指し、「ワンドライブ」とはエンジンを入れてから切るまでの一連の運転を指している。
【0011】
図1はこの発明の実施の形態1によるナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、入力部1、位置情報取得部2、車両情報取得部3、履歴データベース4、地図データベース5、目的地推定部6、行動目的推定部7、案内情報決定部8、ナビゲーション制御部9及び出力部10を備えている。
【0012】
入力部1は、リモートコントローラ、タッチパネル、音声認識装置等から構成されており、ユーザである運転者又は同乗者(以下、使用者と記述)が目的地を入力したり、ナビゲーション装置が提供する情報を選択するために使用される。
【0013】
位置情報取得部2は車両の現在位置を取得する。この位置情報取得部2は、例えばGPS(Global Positioning System)、FM多重放送によって提供される誤差情報を用いてGPSによる測位結果を補正するD−GPS(Differential GPS)、他の人工衛星を用いた測位方式、道路に設置された光ビーコンや電波ビーコンから供給される位置情報を用いる方式、車両の進行方向と走行距離から位置を得る自律航法、車両は道路上を走行するといった制約条件に基づき地図データベース5に登録されている道路の位置へ車両位置を補正するマップマッチング方式等、多様な位置検出方式を1つ又は複数組合せて実現することができる。
【0014】
車両情報取得部3は車両に関する車両情報を取得する。この車両情報としては、例えば、各種ECU(Electronic Control Unit)やETACS(Electronic Timer & Alarm Control System)等の車両コントロールシステム、コラムスイッチ等の各種スイッチ、ハンドル角センサ、車内やトランク内に設置された加圧センサや重量センサといった車両内の状態を取得する装置を1つ又は複数組み合わせて得られる情報や、バッテリ電圧、エンジン水温、油温、エンジン制御、AT制御、ACC(Adaptive Cruise Control)、パワーステアリング等のパワートレイン系の情報や、エアバッグ、ABS等の安全系の情報や、ドアや窓、トランクの開閉状態やロック状態、ミラーの状態、ウィンカの状態、ワイパの状態、ライトの向きや点灯状態等のボディ系の情報や、アクセル開度、ブレーキ開度、ジャイロが指す方角、サスペンション状態、ステアリング状態、燃料残量、排気量、トルク配分、ハンドル角度、ハンドル角速度、シフトレバー位置、現行シフト段、ターンインジケータ状態、シートベルトインジケータ状態等のシャーシ系の情報、走行距離、乗員数、車速、メータ表示車速、加速度、車輪速等の走行情報が含まれる。
【0015】
これ以外にも、車両情報としては、カメラ等の画像取得装置から取得した画像を画像認識する方式や、レーザ等の形状把握装置、重量センサや加圧センサといった圧力センサ、物体がICタグ等の個体識別が可能な装置を搭載し、車両側にICカードリーダといった個体識別装置取り付ける方式といった乗員・物体識別手法を一つ又は複数組み合わせて使用して、座席やトランク内等の車内に存在する人物や物体の数や名前、位置情報といった個体情報も取得しても良い。特に、人物であれば住所や嗜好等の個人情報が取得できても良い。このように、車両情報取得部3が取得する情報を総称して車両情報と呼ぶ。
【0016】
履歴データベース4は、入力部1を通じて入力されたリモコン操作等の使用者の過去の操作情報と、位置情報検出装置2により取得された過去の車両の位置情報と、車両情報取得部3により取得された過去の車両情報とを、履歴データとして記憶し、目的地推定部6に必要とする履歴情報を渡す。
【0017】
地図データベース5は、二次元地図情報の他に、地盤や池、湖、山、谷等の地形、建物、道路や鉄道の高架やトンネルといった構造物等の形状をモデル化した3次元形状情報、さらに、これら三次元形状を構成する面の色やイメージに関するデータを加えた3次元景観情報、これら構造物や施設、観光名所の位置、名称や電話番号、住所等の施設情報を、地図データとして記憶している。
【0018】
目的地推定部6は、入力部1を通じて入力されたリモコン操作等の使用者の現在の操作情報、位置情報検出装置2により取得された現在の車両の位置情報、車両情報取得部3により取得された現在の車両情報の何れかの現在の情報と、履歴データベース4に記憶されている履歴データと、地図データベース5に記憶されている地図データを使用して目的地候補を推定する。目的地候補を推定する方式としては、例えば、利用者が入力した目的地をそのまま使用する方式や、上記特許文献3のように、停止回数から推定した利用者の嗜好に基づき、地図データから近隣の地点を検索する方式や、現在のワンドライブ中の走行経路と、それ以前の走行経路を比較して目的地を選択する方式等を、1つ又は複数組み合わせて使用する。
【0019】
この現在のワンドライブ中の走行経路と、それ以前の走行経路を比較して目的地を選択する方式の場合、現在の走行経路の長さをl_now、現在の走行経路と一致した過去の走行経路nの走行経路の長さをl_nとしたときに、一致度match_nを次の式(1)により計算し、一致度match_nが最も高い過去の走行経路nの目的地destination_nを目的地候補として選択する。
match_n=l_n/l_now (1)
【0020】
図2は目的地推定部6による目的地候補の推定結果を示す図であり、例えば上記の一致度match_nを使用する方式において、match_nが高い走行経路k個の目的地を選択するといった方式で、目的地候補を複数としても良く、図2に示すように、更に一致度等を利用して信頼度を付加しても良い。ここで、目的地候補の信頼度は、上記一致度の他に、単なる順位付けをした数値で示しても良い。
【0021】
行動目的推定部7は、入力部1を通じて入力された使用者の現在の操作情報、位置情報検出装置2により取得された現在の車両の位置情報、車両情報取得部3により取得された現在の車両情報の何れかの現在の情報と、地図データベース5に記憶されている周辺の地図データと、目的地推定部6により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する。この行動目的の推定方法に関しては後述する。
【0022】
案内情報決定部8は、行動目的推定部7により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する。例えば、行動目的がショッピングであった場合には、提示情報決定部7は、新しく開店した店舗の情報や経路情報等を提示したり、行動目的が電車に乗ることであった場合には、電車の時刻表や運行状況を提示する。
【0023】
ナビゲーション制御部9は、位置情報取得部2により取得された現在の車両の位置情報と、車両情報取得部3により取得された車両情報を使用して、使用者が入力部1を介して入力した目的地に応じて誘導経路を計算したり、誘導経路に応じて使用者への案内情報を生成するといったナビゲーション装置が持つ、運転者を目的地に誘導するための基本的な機能を提供するために必要なデータ処理を行う他、車両位置や目的地、目的経路に関連する交通情報や観光地、飲食店や物販店等の情報の検索、使用者が入力した条件にマッチした施設の検索といったデータ処理を行う。また、ナビゲーション制御部9は、案内情報決定部8により決定された案内情報を受け取り、現在の画面状態等に従って案内情報を出力するタイミングや画面上の出力位置等を制御する。
【0024】
出力部10は、ディスプレイによる画面表示やスピーカを使用した音声出力といった出力手段を通じて、ナビゲーション制御部9の制御に基づき案内情報を使用者に提示する。
【0025】
図3は行動目的推定部7の処理手順を示すフローチャートである。ここでは、車両情報取得部3が取得する車両情報として、乗員数と荷物の種類のみを取得した場合について説明する。また、目的地候補としては、図2に示すように、走行経路の一致度match_nを使用する方式で得られた複数の目的地候補を使用する。
【0026】
図3のステップST11〜ST15において、行動目的推定部7は目的地候補毎の行動目的を選択し、選択した行動目的の確信度を計算する。ステップST11において、行動目的推定部7は目的地候補nを選択する。ステップST12において、行動目的推定部7は、地図データベース5を検索して目的地推定部6により推定された目的地候補nのジャンルを抽出し、保持している行動目的推定テーブルの中から抽出したジャンルに対応する行動目的推定テーブルを選択する。
図4は行動目的推定部7が保持する駅の行動目的推定テーブルの例を示す図である。例えば、目的地候補のジャンルが駅であれば、行動目的推定部7は、図4に示すような駅の行動目的推定テーブルを選択する。
【0027】
ステップST13において、行動目的推定部7は、上記ステップST12で選択した駅の行動目的推定テーブルに書かれた目的地や車両情報等の各条件と、車両情報取得部3により取得した現在の乗員数と荷物のデータとが一致するかどうかを調べ、一致する条件があればそれに応じた行動目的を選択し、選択した行動目的の確信度p_i_nowを求める。一致する条件が複数存在する場合には、確信度p_i_nowが高い方を優先する。図4では、行動目的の確信度p_i_nowは予め定められているパラメータであるが、使用者やナビゲーション装置によって任意に変更しても良いし、例えば目的地や車両情報等の各条件jに係数w_jを持たせておき、次の式(2)により行動目的の確信度p_i_nowを算出しても良い。
p_i_now=Σ(w_j×1) 条件jと現在のデータが一致の場合
=Σ(w_j×0) それ以外 (2)
【0028】
ステップST14において、行動目的推定部7は、求めた行動目的の確信度p_i_nowと目的地候補の信頼度(現在の例では走行経路の一致度match_n)を使用して、次の式(3)により行動目的の累積確信度p_iを更新する。
p_i=p_i+p_i_now×match_n (3)
【0029】
ステップST15において、行動目的推定部7は、次の目的地候補を選択し、上記ステップST12〜ST14を繰り返す。ステップST16において、行動目的推定部7は、最終的に最大の累積確信度max(p_i)に対応する行動目的を、使用者の行動目的として選択して提示情報決定部8に出力する。このとき、行動目的推定部7は、選択した行動目的に、累積確信度p_iを付け加えても良い。
【0030】
以上のように、この実施の形態1によれば、目的地推定部6が現在の情報と履歴データと地図データに基づき目的地候補を推定し、行動目的推定部7が現在の情報と地図データと目的地候補と行動目的推定テーブルに基づき使用者の行動目的を推定することにより、使用者の行動目的を入力しなくても、使用者の行動目的を考慮した使用者にとって有用な案内情報を提示することができるという効果が得られる。
【0031】
実施の形態2.
この発明の実施の形態2によるナビゲーション装置の構成を示すブロック図は上記実施の形態1の図1と同じである。この実施の形態2では、使用者への案内情報を提示後に、行動目的推定部7が入力部1や位置情報取得部2や車両情報取得部3から各種情報を受け取り、現在のワンドライブ中で以前に推定した行動目的に対応する使用者への案内情報に対する使用者の反応を考慮して、行動目的の次の推定を行うことが特徴である。
【0032】
図5は行動目的推定部7及び案内情報決定部8の処理手順を示すフローチャートである。ステップST21において、行動目的推定部7は、現在のワンドライブ中に、案内情報決定部8、ナビゲーション制御部9及び出力部10を介して、使用者に対して既に何らかの案内情報を提示したことがあるかどうかを判断する。案内情報の提示を行っていない場合には、ステップST22に移り、上記の実施の形態1で述べた方式にしたがって行動目的を推定する。
【0033】
上記ステップST21で、既に何らかの案内情報の提示を行っていた場合は、ステップST23において、行動目的推定部7は、保持している使用者の反応に対応する推定した行動目的の累積確信度テーブルを使用して、以前に提示した案内情報と使用者の反応から、以前に推定した行動目的の累積確信度を求める。
図6は行動目的推定部7が保持する使用者の反応に対応する推定した行動目的の累積確信度テーブルの例を示す図である。この累積確信度テーブルでは、以前に推定した行動目的の累積確信度は予め固定されているが、例えばハンドルの角度から累積確信度を求める場合、案内情報を提示してからt秒経ったときに、ハンドルをd度回転させたとすると、次の式(4)により累積確信度を計算で求めるようにしても良い。
累積確信度=d/360/t (4)
【0034】
ステップST24において、行動目的推定部7は、上記ステップST23で求めた累積確信度と累積確信度のしきい値Xを比較し、以前に推定した行動目的が正しいか間違っているかを判断する。累積確信度のしきい値Xは、システム又は使用者が事前に定めておいても良いし、以前に推定した行動目的の累積確信度を使用するといった、その場で計算されても良い。求めた累積確信度がしきい値Xより大きければ、ステップST25に進み、以前に推定した行動目的を変化させず、そのままとする。
【0035】
求めた累積確信度がしきい値X以下であれば、ステップST26において、行動目的推定部7は、上記実施の形態1で述べた方式等により行動目的を再推定する。ただし、例えば、以前の行動目的がAで、再推定を行った場合もAが選択された場合には、確信度が2番目の行動目的を選択し、以前に選択した行動目的以外の行動目的が選択されるようにする。
【0036】
上記ステップST22,ST25,ST26で選択された行動目的は、次のステップST27に送られるが、このとき、累積確信度の値を付加しておいても良い。
【0037】
ステップST27において、案内情報決定部8は、上記ステップST22,ST25,ST26の何れかによる選択された行動目的を受け取り案内情報を決定するが、例えば、保持している案内情報テーブルにより、行動目的が選択された回数やその累積確信度に応じて提示する案内情報を決定する。
図7は案内情報決定部8が保持する案内情報テーブルの例を示す図である。案内情報決定部8は図7に示すテーブルを参照して提示する案内情報を決定する。
【0038】
ステップST28において、案内情報決定部8は、上記ステップST27で決定した案内情報を、ナビゲーション制御部9及び出力部10を介して使用者に提示する。ステップST29において、行動目的推定部7はハンドルの回転角といった車両情報や現在の位置情報等の変化により使用者の反応を取得し、ステップST21以降の次回の行動目的の推定と提示する案内情報の決定に使用する。
【0039】
以上のように、この実施の形態2によれば、行動目的推定部7が提示した行動目的に対する使用者の反応を考慮して次回の行動目的を推定し、案内情報決定部8が案内情報を決定することにより、使用者にとってより有用な案内情報を提示することができるという効果が得られる。
【0040】
実施の形態3.
図8はこの発明の実施の形態3によるナビゲーション装置の構成を示すブロック図である。図8に示すナビゲーション装置は、上記実施の形態1の図1に行動目的データベース11を追加し、行動目的推定部7が履歴データベース4からの履歴データを入力するように構成したもので、その他の構成は図1と同じである。図8において、行動目的データベース11は過去に推定された行動目的を記憶し、行動目的推定部7は、現在の情報と、履歴データベース4からの履歴データと、行動目的データベース11に記憶されている過去に推定された行動目的に基づき行動目的を推定し、推定した行動目的を行動目的データベース11に記憶する。
【0041】
図9は行動目的推定部7の処理手順を示すフローチャートである。ステップST31において、行動目的推定部7は現在の情報と履歴データベース4に記憶されている履歴データを比較して類似度を算出する。例えば、行動目的推定部7は、現在の目的地や走行経路や車両情報と、履歴データベース4に記憶されている過去の目的地や走行経路や車両情報を比較して類似度を算出する。このとき、行動目的推定部7は、目的地のみの類似を検出する方法や,目的地と走行経路の類似を調べる方法や、あるいは、車両情報を検出して一致している項目数により類似度を判定する方法等を、1つ又は複数組み合わせて使用して類似度を算出する。
【0042】
ステップST32において、行動目的推定部7は、上記ステップST31で算出した類似度がしきい値Yを超えているか否かにより、現在と過去の目的地や走行経路や車両情報が一致しているか否かを判断する。
【0043】
一致する目的地や走行経路や車両情報が存在する場合に、ステップST33において、行動目的推定部7は、行動目的データベース11から過去の目的地や走行経路や車両情報に一致した行動目的を取得して、それを現在の行動目的と推定する。上記ステップST32で、一致するものが存在しない場合には、ステップST34において、上記実施の形態1又は上記実施の形態2と同様に行動目的を推定する。
【0044】
ステップST35において、行動目的推定部7は、上記ステップST33又は上記ステップST34で選択された行動目的を行動目的データベース11に記録する。
【0045】
以上のように、この実施の形態3によれば、行動目的推定部7が、現在の情報と、履歴データベース4からの履歴データと、行動目的データベース11に記憶されている過去に推定された行動目的に基づき行動目的を推定することにより、使用者が過去のドライブと似たドライブをしている場合に、行動目的推定の最初の段階から使用者の反応のフィードバックを考慮した行動目的を提示することができ、行動目的の推定の精度を高めることができるという効果が得られる。
【図面の簡単な説明】
【0046】
【図1】この発明の実施の形態1によるナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1によるナビゲーション装置の目的地推定部による目的地候補の推定結果を示す図である。
【図3】この発明の実施の形態1によるナビゲーション装置の行動目的推定部の処理手順を示すフローチャートである。
【図4】この発明の実施の形態1によるナビゲーション装置の行動目的推定部が保持する駅の行動目的推定テーブルの例を示す図である。
【図5】この発明の実施の形態2によるナビゲーション装置の行動目的推定部及び案内情報決定部の処理手順を示すフローチャートである。
【図6】この発明の実施の形態2によるナビゲーション装置の行動目的推定部が保持する使用者の反応に対応する推定した行動目的の累積確信度テーブルの例を示す図である。
【図7】この発明の実施の形態2によるナビゲーション装置の案内情報決定部が保持する案内情報テーブルの例を示す図である。
【図8】この発明の実施の形態3によるナビゲーション装置の構成を示すブロック図である。
【図9】この発明の実施の形態3によるナビゲーション装置の行動目的推定部の処理手順を示すフローチャートである。
【符号の説明】
【0047】
1 入力部、2 位置情報取得部、3 車両情報取得部、4 履歴データベース、5 地図データベース、6 目的地推定部6、7 行動目的推定部、8 案内情報決定部、9 ナビゲーション制御部、10 出力部、11 行動目的データベース。
【特許請求の範囲】
【請求項1】
過去の使用者の操作情報、過去の車両の位置情報、過去の車両に関する車両情報を履歴データとして記憶している履歴データベースと、
地図データを記憶している地図データベースと、
現在の使用者の操作情報、現在の車両の位置情報、現在の車両情報の何れかの現在の情報と、上記履歴データベースに記憶されている履歴データと、上記地図データベースに記憶されている地図データに基づき、目的地候補を推定する目的地推定部と、
上記現在の情報と、上記地図データベースに記憶されている地図データと、上記目的地推定部により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する行動目的推定部と、
該行動目的推定部により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する案内情報決定部とを備えたナビゲーション装置。
【請求項2】
目的地推定部は、現在のワンドライブ中の走行経路と、履歴データベースに記憶されている過去の走行経路を比較し、現在の走行経路の長さと過去の走行経路の長さに基づき目的地の信頼度を計算し、信頼度が高い過去の走行経路の目的地を目的地候補として推定することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
行動目的推定部は、行動目的推定テーブルに記載されている目的地や車両情報等の各条件と現在の情報が一致するかを調べ、上記行動目的推定テーブルに記載されている行動目的の中から一致する条件に対応する行動目的を選択することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
行動目的推定部は確信度が高い行動目的を選択することを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
行動目的推定部は、選択した行動目的の確信度と目的地推定部により計算された目的地の信頼度に基づき、行動目的の累積確信度を更新することを特徴とする請求項4記載のナビゲーション装置。
【請求項6】
行動目的推定部は、使用者に提示した案内情報に対する使用者の反応に対応する行動目的の確信度テーブルを保持し、使用者の反応に基づき上記行動目的の確信度テーブルを参照して、使用者の行動目的の次の推定を行うことを特徴とする請求項1記載のナビゲーション装置。
【請求項7】
案内情報決定部は、行動目的推定部により行動目的が連続して選択された回数又は行動目的の確信度に基づき、提示する案内情報を決定することを特徴とする請求項6記載のナビゲーション装置。
【請求項8】
過去に推定された行動目的を記憶している行動目的データベースを備え、
行動目的推定部は、現在の情報と、地図データベースに記憶されている地図データと、上記行動目的データベースに記憶されている過去に推定された行動目的に基づき行動目的を推定し、推定した行動目的を上記行動目的データベースに記憶することを特徴とする請求項6記載のナビゲーション装置。
【請求項1】
過去の使用者の操作情報、過去の車両の位置情報、過去の車両に関する車両情報を履歴データとして記憶している履歴データベースと、
地図データを記憶している地図データベースと、
現在の使用者の操作情報、現在の車両の位置情報、現在の車両情報の何れかの現在の情報と、上記履歴データベースに記憶されている履歴データと、上記地図データベースに記憶されている地図データに基づき、目的地候補を推定する目的地推定部と、
上記現在の情報と、上記地図データベースに記憶されている地図データと、上記目的地推定部により推定された目的地候補と、保持している行動目的推定テーブルに基づき、使用者の行動目的を推定する行動目的推定部と、
該行動目的推定部により推定された使用者の行動目的に基づき、使用者に対して提示する案内情報を決定する案内情報決定部とを備えたナビゲーション装置。
【請求項2】
目的地推定部は、現在のワンドライブ中の走行経路と、履歴データベースに記憶されている過去の走行経路を比較し、現在の走行経路の長さと過去の走行経路の長さに基づき目的地の信頼度を計算し、信頼度が高い過去の走行経路の目的地を目的地候補として推定することを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
行動目的推定部は、行動目的推定テーブルに記載されている目的地や車両情報等の各条件と現在の情報が一致するかを調べ、上記行動目的推定テーブルに記載されている行動目的の中から一致する条件に対応する行動目的を選択することを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
行動目的推定部は確信度が高い行動目的を選択することを特徴とする請求項3記載のナビゲーション装置。
【請求項5】
行動目的推定部は、選択した行動目的の確信度と目的地推定部により計算された目的地の信頼度に基づき、行動目的の累積確信度を更新することを特徴とする請求項4記載のナビゲーション装置。
【請求項6】
行動目的推定部は、使用者に提示した案内情報に対する使用者の反応に対応する行動目的の確信度テーブルを保持し、使用者の反応に基づき上記行動目的の確信度テーブルを参照して、使用者の行動目的の次の推定を行うことを特徴とする請求項1記載のナビゲーション装置。
【請求項7】
案内情報決定部は、行動目的推定部により行動目的が連続して選択された回数又は行動目的の確信度に基づき、提示する案内情報を決定することを特徴とする請求項6記載のナビゲーション装置。
【請求項8】
過去に推定された行動目的を記憶している行動目的データベースを備え、
行動目的推定部は、現在の情報と、地図データベースに記憶されている地図データと、上記行動目的データベースに記憶されている過去に推定された行動目的に基づき行動目的を推定し、推定した行動目的を上記行動目的データベースに記憶することを特徴とする請求項6記載のナビゲーション装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−64821(P2007−64821A)
【公開日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願番号】特願2005−251979(P2005−251979)
【出願日】平成17年8月31日(2005.8.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(504176911)国立大学法人大阪大学 (1,536)
【Fターム(参考)】
【公開日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願日】平成17年8月31日(2005.8.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(504176911)国立大学法人大阪大学 (1,536)
【Fターム(参考)】
[ Back to top ]