
ナビゲーション装置
【課題】ネットワークを介してダウンロードした地図情報を用いるナビゲーション装置において、地図情報をより効率的に取得することができるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置100において、特定手段(特定プログラム64b等)は走行方向を特定し、地図情報取得手段(地図情報取得プログラム64c等)はネットワークを介して所定のエリア単位に区画された地図情報を取得し、記憶制御手段(記憶制御プログラム64d等)は地図情報取得手段(地図情報取得プログラム64c等)により取得された地図情報を地図情報記憶部632bに記憶する。また、地図情報取得手段(地図情報取得プログラム64c等)は、走行中のエリアに隣接し、且つ特定手段(特定プログラム64b等)により特定された走行方向に存在するエリアである接近エリアの地図情報を取得する。
【解決手段】ナビゲーション装置100において、特定手段(特定プログラム64b等)は走行方向を特定し、地図情報取得手段(地図情報取得プログラム64c等)はネットワークを介して所定のエリア単位に区画された地図情報を取得し、記憶制御手段(記憶制御プログラム64d等)は地図情報取得手段(地図情報取得プログラム64c等)により取得された地図情報を地図情報記憶部632bに記憶する。また、地図情報取得手段(地図情報取得プログラム64c等)は、走行中のエリアに隣接し、且つ特定手段(特定プログラム64b等)により特定された走行方向に存在するエリアである接近エリアの地図情報を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System:全地球測位システム)等を利用して現在
位置を測位し、測位した現在位置を地図情報とともに表示画面上に表示するナビゲーション装置が実用化されている。
【0003】
このようなナビゲーション装置においては、ナビゲーション装置自身が予め保持している地図情報に基づいて地図表示を行う形態の他に、ネットワークを介してダウンロードした地図情報に基づいて地図表示を行う形態が知られている。
例えば、特許文献1には、通信機能を備えるカーナビゲーション装置において、情報提供センタにアクセスして、所望するパーセル(地図情報)をダウンロードする技術が開示されている。また、同様に、特許文献2には、予めダウンロードして記憶部に記憶させた地図データを用いることにより、多量の地図データのための記憶手段を設けることなく、現在位置の地図の表示を直ちに行うことを可能とする地図表示システムが開示されている。
さらに、特許文献3には、自車の走行に伴って異なるスケールを有する複数の地図を順次ダウンロードして表示する地図表示システムにおいて、異なるスケールの地図のダウンロードが可能となった場合これを表示すると共に、ユーザの選択情報に基づいてダウンロードの実行・不実行を決定する地図表示システムが提案されており、これにより、ユーザの希望しない地図をダウンロードすることによる無駄な課金の発生を防止することができる。
【特許文献1】特開2003−247843号公報
【特許文献2】特開2005−98707号公報
【特許文献3】特開2004−354819号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1や特許文献2の技術では、自車位置を含む周辺の地図情報をダウンロードするため、自車の走行方向でない地図情報は使われない可能性が高く、ダウンロードにかかるコストや時間、地図情報を記憶する容量等の面で、無駄が生じてしまうという問題があった。また、特許文献3の地図表示システムにおいては、ダウンロードの実行・不実行を選択しなければならず、そのための操作が煩わしいという問題があった。
【0005】
本発明の課題は、ネットワークを介してダウンロードした地図情報を用いるナビゲーション装置において、地図情報をより効率的に取得することができるナビゲーション装置を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、請求項1に記載の発明は、現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を取得することを特徴とする。
【0007】
請求項2に記載の発明は、請求項1に記載のナビゲーション装置において、前記地図情報取得手段は、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に、当該接近エリアの前記地図情報を取得することを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2に記載のナビゲーション装置において、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段を備え、
前記地図情報取得手段は、前記判断手段により、前記現在位置から所定の第1範囲内に、前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1〜3の何れか一項に記載のナビゲーション装置において、前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段を備えることを特徴とする。
【0010】
請求項5に記載の発明は、現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段と、
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に取得するとともに、前記判断手段により、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする。
【発明の効果】
【0011】
本発明によれば、特定手段により、ナビゲーション装置の走行方向が特定され、地図情報取得手段により、ネットワークを介して所定のエリア単位に区画された地図情報が取得され、記憶制御手段により、地図情報取得手段により取得された地図情報が記憶部に記憶され、地図情報取得手段により、走行中のエリアに隣接し、且つ特定手段により特定された走行方向に存在するエリアである接近エリアの地図情報が取得される。
したがって、ネットワークを介してダウンロードした地図情報を用いるナビゲーション装置において、走行方向に存在する隣接エリアの地図情報のみが取得されることとなるため、地図情報の取得をより効率的に行うことができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図面を参照しながら説明を行う。
【0013】
まず、本実施形態のナビゲーション装置100の全体構成について、図1を参照しながら説明する。
本実施形態のナビゲーション装置100は、例えば、図1に示すように、車両に搭載されるポータブル型のナビゲーション装置であり、ネットワークNを介して情報提供装置200と接続されている。
【0014】
情報提供装置200は、地図情報・経路案内等の各種情報をネットワークNに接続されたナビゲーション装置100等の端末装置に提供する装置であり、通信部200a、地図情報DB200b、ユーザ情報DB200cを備えている。
通信部200aは、ネットワークNで接続されたナビゲーション装置100から、地図情報要求信号等の各種要求を受け付けるとともに、この要求に応じて地図情報等の各種情報をナビゲーション装置100に配信する。
【0015】
地図情報DB200bは、例えば、種類や縮尺の異なる地図情報を階層構造で格納する。例えば、収録される道路種別に応じて階層分けを行う場合、上位階層には、高速自動車国道や一般国道が収録された広域地図を格納し、中位階層には、広域地図で表示される道路に加えて、都道府県道や市町村道が収録された中域地図を格納し、下位階層には、中域地図で表示される道路に加えて、更に、細街路が収録された詳細地図を格納する。
【0016】
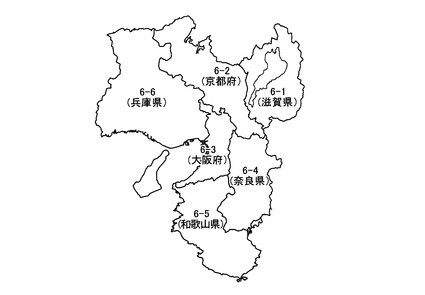
さらに、各階層に格納される地図情報は、所定のエリア単位のデータの集合となっている。ここでは、例えば、エリア分割を都道府県(所定のエリア)単位で行うものとする。
例えば、図3に例示する地図情報を参照しながら、当該地図情報について説明する。地図情報は、都道府県単位に分割されており、分割された各エリアのそれぞれには、エリアコードが割り当てられている。エリアコードは、例えば、上位階層としての地方別のコード(例えば、近畿地方は「6」)と、下位階層の都道府県別のコードと、から成る階層構造を有するコードが用いられる。例えば、図3の例では、大阪府に「6−3」、奈良県に「6−4」、和歌山県に「6−5」のエリアコードが付されている。
なお、エリア分割は、都道府単位で行うものに限られず、任意の単位で分割することができる。例えば、市町村・行政区画単位等、より細かいエリアに分割しても良い。また、地表面を網目状に分割するメッシュ分割を行っても良い。
【0017】
各エリア単位の地図情報には、そのエリアに含まれるノードのノード情報及びリンクのリンク情報が含まれている。ノード情報は、リンクの交点(交差点)・リンクの端点(行き止まり)・リンクの属性が変わる点を規定するものであり、例えば、ノードID、ノードの座標、ノードの名称、ノードに接続されるリンクのリンクID等である。また、リンク情報は、それぞれのノードとノードを結ぶ線分を規定するものであり、例えば、リンクID、リンクの距離、リンクの始点・終点の座標、道路の名称、道路種別、幅員、車線数、交通規制等である。
また、地図情報には、上述のノード情報・リンク情報の他、施設情報、店舗情報、建物情報、住所情報、公園情報、鉄道情報、地形情報等も含まれ、これらのデータに基づいて、地図情報の表示、経路探索、経路案内情報の提供が行われる。
【0018】
ユーザ情報DB200cは、例えば、情報提供装置200にネットワーク接続されるナビゲーション装置100等の端末の情報を記憶する。具体的には、例えば、各端末の端末ID、表示部4の表示サイズ、解像度等が対応づけられて記憶されている。
【0019】
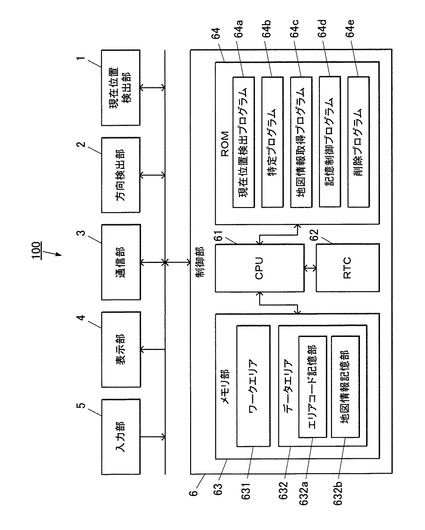
次に、本実施形態のナビゲーション装置100の要部構成について、図2を参照しながら説明する。
ナビゲーション装置100は、例えば、図2に示すように、現在位置検出手段としての現在位置検出部1、特定手段としての方向検出部2、地図情報取得手段としての通信部3、表示部4、入力部5、制御部6等を備えて構成される。
【0020】
現在位置検出部1は、例えば、ナビゲーション装置100の絶対座標を検出するGPS測位部等から構成され、ナビゲーション装置100自身の現在位置情報を検出し、検出した現在位置情報に基づく現在位置検出信号を制御部6に出力する。
具体的には、GPS測位部は、例えば、位置が既知である複数(例えば、少なくとも3つ)の人工衛星からの電波をGPSアンテナ(図示省略)により受信し、各人工衛星から受信した電波の到達時間から、各人工衛星からのナビゲーション装置100までの距離を算出し、各人工衛星からの距離の交点の緯度・経度データを特定する。
【0021】
方向検出部2は、例えば、ナビゲーション装置100の角速度を検出するジャイロセンサ等の方位センサや、磁気を測定することによりナビゲーション装置100の絶対方位を検出する地磁気センサ等から構成され、ナビゲーション装置100の走行方向を検出し、検出した走行方向に基づく走行方向検出信号を制御部6に出力する。
【0022】
また、走行に応じたパルスを計測することにより走行距離を検出する走行距離検出センサを設け、当該走行距離検出センサ及び上述の方向検出部2により、現在位置検出手段を構成しても良い。
【0023】
通信部3は、例えば、情報提供装置200とネットワーク接続されており、情報提供装置200に対して、地図情報要求信号等の各種要求をネットワークNを介して送信するとともに、この要求に応じて、情報提供装置200から送信される地図情報等の各種情報を受信する。
【0024】
表示部4は、例えば、LCD(Liquid Crystal Display)等のディスプレイを備えて構成され、制御部6からの制御に応じて、地図情報その他の各種情報を当該ディスプレイに表示させる。
【0025】
入力部5は、例えば、文字/数字キー、各種機能キー、表示部4と一体的に構成されたタッチパネル等から構成され、ユーザによるキーの押下に基づくキー押下信号を制御部6に出力するとともに、タッチパネルにおいてユーザによりタッチ操作が行われると、当該タッチ操作された座標を算出し、算出した座標に基づく押下信号を制御部6に出力する。
【0026】
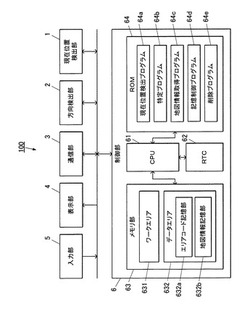
制御部6は、CPU(Central Processing Unit)61、RTC(Real Time Clock)62、メモリ部63、ROM(Read Only Memory)64等を備えて構成されている。
【0027】
CPU61は、ナビゲーション装置100の各部から入力された入力信号等に応じて、ROM64に格納された各種プログラムを実行するとともに、実行にかかるプログラムに基づいて各部に出力信号を出力することにより、ナビゲーション装置100の動作全般を統括制御する。
【0028】
RTC62は、現在時刻等の時間データを計時して、計時した時間データをCPU61に対して出力する。
【0029】
メモリ部63は、例えば、RAM(Random Access Memory)等の揮発性メモリからなるワークエリア631を備えており、CPU61によって各種プログラムが実行される際に生じる処理結果や、入力されたデータ等をこのワークエリア631に記憶させる。
【0030】
また、メモリ部63は、例えば、EPROM(Erasable Programmable ROM)等の不揮発性メモリからなるデータエリア632を備えている。データエリア632には、例えば、エリアコード記憶部632a及び地図情報記憶部(記憶部)632b等が備わる。
【0031】
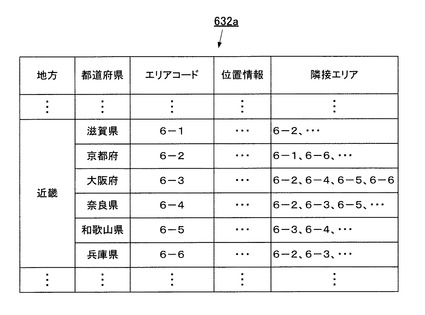
エリアコード記憶部632aは、地図情報を構成するエリア単位の地図情報のそれぞれに付与されているエリアコードを記憶する。
図4は、エリアコード記憶部632aを例示する図である。図4に示すように、エリアコード記憶部632aは、都道府県単位に分割されたエリアのそれぞれに対して、エリアコードを割り当てて記憶するとともに、そのエリアが存する地方名、都道府県名、位置情報(緯度範囲・経度範囲)、隣接エリアのエリアコード等を相互に対応づけて記憶している。
【0032】
地図情報記憶部632bは、後述する地図情報取得プログラム64cの実行により、ネットワークNを介して情報提供装置200から取得された地図情報を記憶する。
【0033】
ROM64は、例えば、不揮発性メモリから成るプログラム格納エリアを有しており、現在位置検出プログラム64a、特定プログラム64b、地図情報取得プログラム64c、記憶制御プログラム64d、削除プログラム64e等を記憶する。
【0034】
現在位置検出プログラム64aは、例えば、CPU61に、現在位置Pを検出する機能を実現させるためのプログラムである。
具体的には、CPU61は、GPS測位部等から構成される現在位置検出部1に、ナビゲーション装置100自身の現在位置情報を取得させ、当該現在位置検出部1から出力される現在位置検出信号に基づいて、ナビゲーション装置100の現在位置Pとしての座標(緯度・経度)を特定する。さらに、特定される現在位置Pに基づいて、マップマッチング処理を行い、ナビゲーション装置100が搭載された車両が位置している道路を、データエリア632等の所定の領域に記憶されているマッチングデータ(図示省略)に基づいて特定する。マップマッチング処理では、例えば、車両の走行軌跡に応じて、マッチング候補となる道路を求め、マッチング候補から最も相関が高い道路を特定して、その道路上に現在位置Pをマッチングさせるパターンマッチング等を用いる。
CPU61は、かかる現在位置検出プログラム64aを実行することにより、現在位置検出部1とともに現在位置検出手段として機能する。
【0035】
特定プログラム64bは、例えば、CPU61に、ナビゲーション装置100の走行方向を特定する機能を実現させるためのプログラムである。
具体的には、CPU61は、地磁気センサや方位センサ等から構成される方向検出部2に、ナビゲーション装置100の走行方向を検出させ、当該方向検出部2から出力される走行方向検出信号に基づいて、ナビゲーション装置100の走行方向を特定する。
CPU61は、かかる特定プログラム64bを実行することにより、方向検出部2とともに特定手段として機能する。
【0036】
地図情報取得プログラム64cは、例えば、CPU61に、ネットワークNを介して所定のエリア単位に区画された地図情報を取得する機能を実現させるためのプログラムである。
具体的には、当該地図情報取得プログラム64cの実行において、CPU61は、走行中のエリアに隣接し、且つ、特定プログラム64bの実行により特定された走行方向に存在するエリアである接近エリアの地図情報を、現在位置Pと接近エリアまでの距離が所定値D以下になった場合に取得する。また、CPU61は、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在するか否かを判断し、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの地図情報を取得する。
CPU61は、かかる地図情報取得プログラム64cを実行することにより、判断手段、地図情報取得手段として機能する。
【0037】
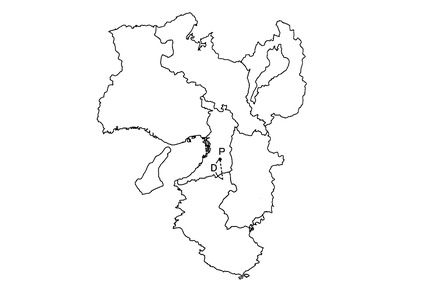
ここで、まず、図5〜図7を参照しながら、当該地図情報取得プログラム64cの実行による、接近エリアの地図情報取得処理について説明する。
CPU61は、ナビゲーション装置100が搭載される車両の走行中、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定する。なお、図5〜図11において、マークPは、ナビゲーション装置100の現在位置Pを示しており、矢印は、ナビゲーション装置100の走行方向を示している。
CPU61は、現在位置Pとしての座標を特定すると、当該座標に基づいて、エリアコード記憶部632aを参照し、現在位置しているエリアを判定するとともに、現在のエリアに隣接する隣接エリアを判定する。図5の例では、エリアコード「6−3」の大阪府が現在のエリアと判定されるとともに、エリアコード「6−2」の京都府・「6−4」の奈良県・「6−5」の和歌山県・「6−6」の兵庫県の4つのエリアが隣接エリアと判定される。
そして、CPU61は、隣接エリアのうち、走行方向と特定された方向に存在する隣接エリアを特定し、これを接近エリアとする。図5の例では、エリアコード「6−6」の和歌山県が接近エリアであると特定される。
【0038】
次に、CPU61は、エリアコード記憶部632aの位置情報に基づいて、現在位置Pから接近エリアまでの距離を判定する。さらに、現在位置Pから接近エリア(例えば、和歌山県)までの距離を判定すると、当該距離が所定値D(例えば、30km)以下となったか否かを判断する。例えば、図6の例では、接近エリアまでの距離は所定値D以下となっていないと判断される。
その後、車両がさらに走行を継続して、例えば、図7のPに位置することとなった場合、接近エリアまでの距離は所定値D以下となったと判断される。すると、CPU61は、地図情報記憶部632bに、接近エリアの地図情報が記憶されているか否かを判断し、接近エリアの地図情報が記憶されていない場合には、当該接近エリアの地図情報を要求する地図情報要求信号を、通信部3により、ネットワークNを介して情報提供装置200に送信する。当該地図情報要求信号には、地図情報を取得したい接近エリアのエリアコードが含まれており、情報提供装置200では、当該地図情報要求信号を受信すると、これに含まれるエリアコードに基づいて、地図情報DB200bから、当該エリアコードが割り当てられたエリアの地図情報を読み出し、読み出した地図情報を、ネットワークNを介してナビゲーション装置100に送信する。このとき、ユーザ情報DB200cが参照されて、ナビゲーション装置100における表示サイズ・解像度の地図情報が送信される。そして、ナビゲーション装置100において、情報提供装置200から地図情報が送信されると、CPU61は、当該地図情報を通信部3により受信する。
【0039】
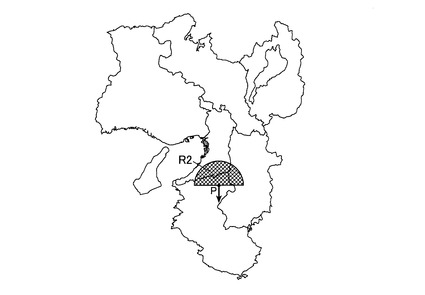
次に、図8及び図9を参照しながら、当該地図情報取得プログラム64cの実行による、現在位置Pの所定の第1範囲R1内に存在するエリアの地図情報取得処理について説明する。
CPU61は、前述したように、ナビゲーション装置100が搭載された車両の走行中に、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定すると、現在位置Pから所定の第1範囲R1内に、接近エリア以外のエリアがあるか否かを判断する。ここで、現在位置Pから所定の第1範囲R1は、走行方向に向かう、現在位置Pを中心とする半径25kmの半円領域であるものとし、図8において網目掛けされた部分である。なお、図8におけるPの位置は、図7におけるPの位置と同一であるものとして説明する。
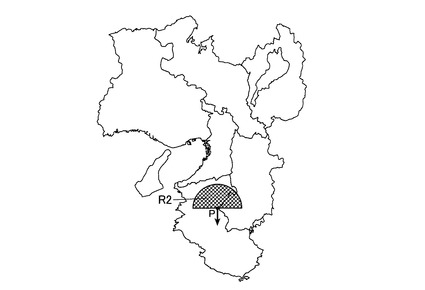
例えば、図8の例では、現在位置Pから第1範囲R1内に、接近エリア以外のエリアは無いと判断される。その後、車両がさらに走行を継続して、例えば、図9のPに位置することとなった場合には、現在位置Pから第1範囲R1内に、接近エリア以外のエリア(例えば、エリアコード「6−4」の奈良県)があると判断され、当該エリアが、現在位置Pから第1範囲R1内に存在するエリアであると特定される。
【0040】
CPU61は、現在位置Pから第1範囲R1内に、接近エリア以外のエリアがあると判断すると、当該エリアの地図情報が、地図情報記憶部632bに記憶されているか否かを判断する。そして、当該エリアの地図情報が記憶されていない場合には、当該エリアの地図情報を要求する地図情報要求信号を、通信部3により、ネットワークNを介して情報提供装置200に送信する。すると、情報提供装置200では、前述の処理が行われて、地図情報DB200bから地図情報が読み出され、ネットワークNを介して、ナビゲーション装置100に送信される。そして、ナビゲーション装置100において、情報提供装置200から地図情報が送信されると、CPU61は、当該地図情報を通信部3において受信する。
【0041】
なお、現在位置Pから第1範囲R1は、図8及び図9に例示する半円領域に限られることなく、270度、360度等の円領域であっても良く、また、矩形領域・その他の多角形領域等であっても良い。
また、上述の説明では、接近エリアの地図情報を取得する所定値Dよりも第1範囲R1の距離を短く構成した。すなわち、図7・図8のPに位置している時点では、走行方向に存在する接近エリアの地図情報のみが取得され、さらに走行して、図9のPに位置することとなった時点で、走行方向に存在しない第1範囲R1内に存在するエリアの地図情報が取得されることとなる。したがって、走行方向に存在する、より走行する可能性の高い接近エリアの地図情報が優先的に取得されることとなり、地図情報取得の効率性がより向上することとなる。
【0042】
記憶制御プログラム64dは、例えば、CPU61に、地図情報取得プログラム64cの実行により取得された地図情報を地図情報記憶部632bに記憶させる機能を実現させるためのプログラムである。
具体的には、CPU61は、前述の地図情報取得プログラム64cの実行により、地図情報の要求に応じて、ナビゲーション装置100から地図情報が送信され、当該地図情報を通信部3において受信すると、受信した地図情報を地図情報記憶部632bに記憶させる。
CPU61は、かかる記憶制御プログラム64dを実行することにより、記憶制御手段として機能する。
【0043】
削除プログラム64eは、例えば、CPU61に、地図情報記憶部632bに記憶された地図情報のうち、現在位置検出プログラム64aの実行により検出される現在位置Pから所定の第2範囲R2以上離れた位置の地図情報を削除する機能を実現させるためのプログラムである。
CPU61は、かかる削除プログラム64eを実行することにより、削除手段として機能する。
【0044】
ここで、図10及び図11を参照しながら、当該削除プログラム64eの実行による、地図情報削除処理について説明する。
CPU61は、前述のように、ナビゲーション装置100が搭載される車両の走行中、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定する。
【0045】
ナビゲーション装置100の現在位置P及び走行方向を特定すると、CPU61は、現在位置Pから所定の第2範囲R2以内に存在するエリアを判定する。ここで、現在位置Pからの第2範囲R2は、走行方向と逆方向に向かう、現在位置Pを中心とする半径50kmの半円領域であるものとし、図10・図11において網目掛けされた部分である。
図10の例では、現在位置Pから所定の第2範囲R2内に存在するエリアは、エリアコード「6−3」の大阪府及び「6−4」の奈良県であると判定される。そして、CPU61は、所定の第2範囲R2内に存在するエリア以外のエリア(例えば、「6−1」の滋賀県、「6−2」の京都府、「6−6」の兵庫県等)の地図情報が、地図情報記憶部632bに記憶されているかを判断し、記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。なお、図10の時点では、所定の第2範囲R2以内に存在するエリア以外のエリアの地図情報は、既に削除されている。
そして、その後、車両がさらに走行を継続して、例えば、図11のPに位置することとなった時点において、「6−3」の大阪府が現在位置Pから所定の第2範囲R2内に存在するエリアから外れ、現在位置Pから所定の第2範囲R2内に存在するエリアが「6−4」の奈良県のみであると判定されると、CPU61は、当該「6−3」の地図情報が、地図情報記憶部632bに記憶されているかを判断し、記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。
【0046】
なお、現在位置Pから第2範囲R2は、図10及び図11に例示する半円領域に限られることなく、270度、360度等の円領域であっても良く、また、矩形領域・その他の多角形領域等であっても良い。
【0047】
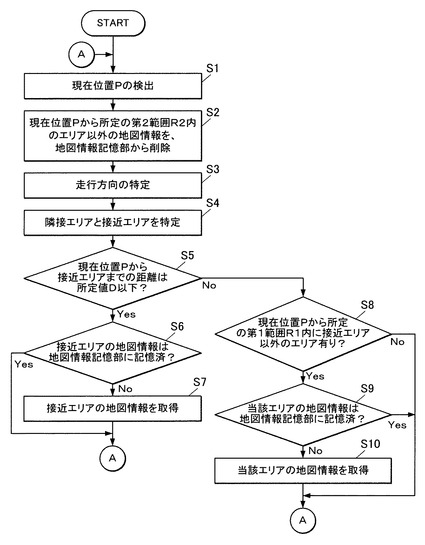
次に、図12のフローチャートを参照しながら、CPU61により実行される地図情報取得・削除処理について説明する。
まず、ステップS1において、CPU61は、現在位置検出部1から出力される現在位置検出信号に基づいて、ナビゲーション装置100の現在位置Pを特定する。次に、ステップS2において、現在位置Pから所定の第2範囲R2内に存在するエリア以外のエリアの地図情報が、地図情報記憶部632bに記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。
【0048】
ステップS3において、CPU61は、方向検出部2から出力される走行方向検出信号に基づいて、ナビゲーション装置100の走行方向を特定し、ステップS4において、エリアコード記憶部632aを参照して、特定した現在位置P及び走行方向に基づいて、隣接エリア及び接近エリアを特定する。ステップS5において、CPU61は、現在位置Pから接近エリアまでの距離が、所定値D以下となったか否かを判断する。CPU61は、ステップS5において、現在位置Pから接近エリアまでの距離が所定値D以下となっていないと判断すると(ステップS5;No)、ステップS8に進み、一方、現在位置Pから接近エリアまでの距離が所定値D以下となったと判断すると(ステップS5;Yes)、ステップS6に進む。
ステップS6において、CPU61は、接近エリアの地図情報は、地図情報記憶部632bに記憶されているか否かを判断する。CPU61は、ステップS6において、接近エリアの地図情報は地図情報記憶部632bに記憶されていると判断すると(ステップS6;Yes)、ステップS1に戻って以上の処理を繰り返し、一方、地図情報記憶部632bに記憶されていないと判断すると(ステップS6;No)、ステップS7において、接近エリアの地図情報を要求する地図情報要求信号を、ネットワークNを介して情報提供装置200に送信する。そして、当該地図情報要求信号に基づいて情報提供装置200から送信される接近エリアの地図情報を通信部3において取得し、ステップS1に戻って以上の処理を繰り返す。
【0049】
ステップS8において、CPU61は、現在位置Pから所定の第1範囲R1内に、接近エリア以外のエリアがあるか否かを判断する。そして、現在位置Pから所定の第1範囲R1内に接近エリア以外のエリアがないと判断すると(ステップS8;No)、ステップS1に戻って以上の処理を繰り返し、一方、現在位置Pから所定の第1範囲R1内に接近エリア以外のエリアがあると判断すると(ステップS8;Yes)、ステップS9に進む。
ステップS9において、CPU61は、現在位置Pから第1範囲R1内に存在する接近エリア以外のエリアの地図情報は、地図情報記憶部632bに記憶されているか否かを判断する。CPU61は、ステップS9において、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報は地図情報記憶部632bに記憶されていると判断すると(ステップS9;Yes)、ステップS1に戻って以上の処理を繰り返し、一方、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報は地図情報記憶部632bに記憶されていないと判断すると(ステップS9;No)、ステップS10において、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報を要求する地図情報要求信号を、ネットワークNを介して情報提供装置200に送信する。そして、当該地図情報要求信号に基づいて情報提供装置200から送信される地図情報を通信部3において取得し、ステップS1に戻って以上の処理を繰り返す。
【0050】
以上説明した本実施形態のナビゲーション装置100によれば、CPU61による現在位置検出プログラム64aの実行により、現在位置Pが検出され、特定プログラム64bの実行により、ナビゲーション装置100の走行方向が特定され、地図情報取得プログラム64cの実行により、ネットワークNを介して所定のエリア単位に区画された地図情報が取得され、記憶制御プログラム64dの実行により、地図情報取得プログラム64cの実行により取得された地図情報が地図情報記憶部632bに記憶され、地図情報取得プログラム64cの実行により、走行中のエリアに隣接し、且つ特定プログラム64bの実行により特定された走行方向に存在するエリアである接近エリアの地図情報が取得される。
したがって、ネットワークNを介してダウンロードした地図情報を用いるナビゲーション装置100において、走行方向に存在する隣接エリアの地図情報が取得されることとなるため、地図情報の取得をより効率的に行うことができる。
【0051】
また、CPU61による地図情報取得プログラム64cの実行により、接近エリアの地図情報は、現在位置Pと接近エリアまでの距離が所定値D以下になった場合に取得される。
したがって、適切な距離を所定値Dとして設定した場合には、より確実に接近エリアの地図情報を取得することができるとともに、地図情報の取得をさらに効率的に行うことができる。
【0052】
また、CPU61による地図情報取得プログラム64cの実行により、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在するか否かが判断され、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの地図情報が取得される。
したがって、接近エリアとされたエリアと異なるエリアの方向に走行方向が変わった場合であっても、予め当該エリアの地図情報を効率的に取得しておくことができる。
【0053】
さらに、CPU61による削除プログラム64eの実行により、地図情報記憶部632bに記憶された地図情報のうち、現在位置検出プログラム64aの実行により検出される現在位置Pから所定の第2範囲R2以上離れた位置の地図情報が削除される。
したがって、地図情報記憶部632に、使用する可能性の高い地図情報のみを記憶させることができることとなって、地図情報記憶部632の記憶容量をより小さく構成できることとなり、全地域の地図を保持する場合よりも地図情報の検索速度を向上させることができるとともに、低コストで構成できることとなる。
【0054】
なお、本発明は、上記実施の形態に限られることなく、本発明の趣旨を逸脱しない範囲において、種々の改良並びに設計の変更を行っても良い。
例えば、上記実施形態では、一部の地域における地図情報取得・削除処理の説明を行ったが、より広い範囲又は狭い範囲での移動に対応する構成であっても良い。
【図面の簡単な説明】
【0055】
【図1】本実施形態におけるナビゲーション装置の全体構成を例示するブロック図である。
【図2】本実施形態のナビゲーション装置の全体構成を例示するブロック図である。
【図3】地図情報を例示する図である。
【図4】エリアコード記憶部を例示する図である。
【図5】接近エリアの地図情報取得処理を説明するための図である。
【図6】接近エリアの地図情報取得処理を説明するための図である。
【図7】接近エリアの地図情報取得処理を説明するための図である。
【図8】現在位置の所定の第1範囲内に存在するエリアの地図情報取得処理を説明するための図である。
【図9】現在位置の所定の第1範囲内に存在するエリアの地図情報取得処理を説明するための図である。
【図10】地図情報削除処理を説明するための図である。
【図11】地図情報削除処理説明するための図である。
【図12】地図情報取得・削除処理を示すフローチャートである。
【符号の説明】
【0056】
100 ナビゲーション装置
1 現在位置検出部(現在位置検出手段)
2 方向検出部(特定手段)
3 通信部(地図情報取得手段)
61 CPU(現在位置検出手段、特定手段、地図情報取得手段、記憶制御手段、判断手段、削除手段)
632b 記憶部(地図情報取得手段)
64a 現在位置検出プログラム(現在位置検出手段)
64b 特定プログラム(特定手段)
64c 地図情報取得プログラム(地図情報取得手段、判断手段)
64d 記憶制御プログラム(記憶制御手段)
64e 削除プログラム(削除手段)
N ネットワーク
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System:全地球測位システム)等を利用して現在
位置を測位し、測位した現在位置を地図情報とともに表示画面上に表示するナビゲーション装置が実用化されている。
【0003】
このようなナビゲーション装置においては、ナビゲーション装置自身が予め保持している地図情報に基づいて地図表示を行う形態の他に、ネットワークを介してダウンロードした地図情報に基づいて地図表示を行う形態が知られている。
例えば、特許文献1には、通信機能を備えるカーナビゲーション装置において、情報提供センタにアクセスして、所望するパーセル(地図情報)をダウンロードする技術が開示されている。また、同様に、特許文献2には、予めダウンロードして記憶部に記憶させた地図データを用いることにより、多量の地図データのための記憶手段を設けることなく、現在位置の地図の表示を直ちに行うことを可能とする地図表示システムが開示されている。
さらに、特許文献3には、自車の走行に伴って異なるスケールを有する複数の地図を順次ダウンロードして表示する地図表示システムにおいて、異なるスケールの地図のダウンロードが可能となった場合これを表示すると共に、ユーザの選択情報に基づいてダウンロードの実行・不実行を決定する地図表示システムが提案されており、これにより、ユーザの希望しない地図をダウンロードすることによる無駄な課金の発生を防止することができる。
【特許文献1】特開2003−247843号公報
【特許文献2】特開2005−98707号公報
【特許文献3】特開2004−354819号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1や特許文献2の技術では、自車位置を含む周辺の地図情報をダウンロードするため、自車の走行方向でない地図情報は使われない可能性が高く、ダウンロードにかかるコストや時間、地図情報を記憶する容量等の面で、無駄が生じてしまうという問題があった。また、特許文献3の地図表示システムにおいては、ダウンロードの実行・不実行を選択しなければならず、そのための操作が煩わしいという問題があった。
【0005】
本発明の課題は、ネットワークを介してダウンロードした地図情報を用いるナビゲーション装置において、地図情報をより効率的に取得することができるナビゲーション装置を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、請求項1に記載の発明は、現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を取得することを特徴とする。
【0007】
請求項2に記載の発明は、請求項1に記載のナビゲーション装置において、前記地図情報取得手段は、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に、当該接近エリアの前記地図情報を取得することを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2に記載のナビゲーション装置において、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段を備え、
前記地図情報取得手段は、前記判断手段により、前記現在位置から所定の第1範囲内に、前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする。
【0009】
請求項4に記載の発明は、請求項1〜3の何れか一項に記載のナビゲーション装置において、前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段を備えることを特徴とする。
【0010】
請求項5に記載の発明は、現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段と、
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に取得するとともに、前記判断手段により、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする。
【発明の効果】
【0011】
本発明によれば、特定手段により、ナビゲーション装置の走行方向が特定され、地図情報取得手段により、ネットワークを介して所定のエリア単位に区画された地図情報が取得され、記憶制御手段により、地図情報取得手段により取得された地図情報が記憶部に記憶され、地図情報取得手段により、走行中のエリアに隣接し、且つ特定手段により特定された走行方向に存在するエリアである接近エリアの地図情報が取得される。
したがって、ネットワークを介してダウンロードした地図情報を用いるナビゲーション装置において、走行方向に存在する隣接エリアの地図情報のみが取得されることとなるため、地図情報の取得をより効率的に行うことができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図面を参照しながら説明を行う。
【0013】
まず、本実施形態のナビゲーション装置100の全体構成について、図1を参照しながら説明する。
本実施形態のナビゲーション装置100は、例えば、図1に示すように、車両に搭載されるポータブル型のナビゲーション装置であり、ネットワークNを介して情報提供装置200と接続されている。
【0014】
情報提供装置200は、地図情報・経路案内等の各種情報をネットワークNに接続されたナビゲーション装置100等の端末装置に提供する装置であり、通信部200a、地図情報DB200b、ユーザ情報DB200cを備えている。
通信部200aは、ネットワークNで接続されたナビゲーション装置100から、地図情報要求信号等の各種要求を受け付けるとともに、この要求に応じて地図情報等の各種情報をナビゲーション装置100に配信する。
【0015】
地図情報DB200bは、例えば、種類や縮尺の異なる地図情報を階層構造で格納する。例えば、収録される道路種別に応じて階層分けを行う場合、上位階層には、高速自動車国道や一般国道が収録された広域地図を格納し、中位階層には、広域地図で表示される道路に加えて、都道府県道や市町村道が収録された中域地図を格納し、下位階層には、中域地図で表示される道路に加えて、更に、細街路が収録された詳細地図を格納する。
【0016】
さらに、各階層に格納される地図情報は、所定のエリア単位のデータの集合となっている。ここでは、例えば、エリア分割を都道府県(所定のエリア)単位で行うものとする。
例えば、図3に例示する地図情報を参照しながら、当該地図情報について説明する。地図情報は、都道府県単位に分割されており、分割された各エリアのそれぞれには、エリアコードが割り当てられている。エリアコードは、例えば、上位階層としての地方別のコード(例えば、近畿地方は「6」)と、下位階層の都道府県別のコードと、から成る階層構造を有するコードが用いられる。例えば、図3の例では、大阪府に「6−3」、奈良県に「6−4」、和歌山県に「6−5」のエリアコードが付されている。
なお、エリア分割は、都道府単位で行うものに限られず、任意の単位で分割することができる。例えば、市町村・行政区画単位等、より細かいエリアに分割しても良い。また、地表面を網目状に分割するメッシュ分割を行っても良い。
【0017】
各エリア単位の地図情報には、そのエリアに含まれるノードのノード情報及びリンクのリンク情報が含まれている。ノード情報は、リンクの交点(交差点)・リンクの端点(行き止まり)・リンクの属性が変わる点を規定するものであり、例えば、ノードID、ノードの座標、ノードの名称、ノードに接続されるリンクのリンクID等である。また、リンク情報は、それぞれのノードとノードを結ぶ線分を規定するものであり、例えば、リンクID、リンクの距離、リンクの始点・終点の座標、道路の名称、道路種別、幅員、車線数、交通規制等である。
また、地図情報には、上述のノード情報・リンク情報の他、施設情報、店舗情報、建物情報、住所情報、公園情報、鉄道情報、地形情報等も含まれ、これらのデータに基づいて、地図情報の表示、経路探索、経路案内情報の提供が行われる。
【0018】
ユーザ情報DB200cは、例えば、情報提供装置200にネットワーク接続されるナビゲーション装置100等の端末の情報を記憶する。具体的には、例えば、各端末の端末ID、表示部4の表示サイズ、解像度等が対応づけられて記憶されている。
【0019】
次に、本実施形態のナビゲーション装置100の要部構成について、図2を参照しながら説明する。
ナビゲーション装置100は、例えば、図2に示すように、現在位置検出手段としての現在位置検出部1、特定手段としての方向検出部2、地図情報取得手段としての通信部3、表示部4、入力部5、制御部6等を備えて構成される。
【0020】
現在位置検出部1は、例えば、ナビゲーション装置100の絶対座標を検出するGPS測位部等から構成され、ナビゲーション装置100自身の現在位置情報を検出し、検出した現在位置情報に基づく現在位置検出信号を制御部6に出力する。
具体的には、GPS測位部は、例えば、位置が既知である複数(例えば、少なくとも3つ)の人工衛星からの電波をGPSアンテナ(図示省略)により受信し、各人工衛星から受信した電波の到達時間から、各人工衛星からのナビゲーション装置100までの距離を算出し、各人工衛星からの距離の交点の緯度・経度データを特定する。
【0021】
方向検出部2は、例えば、ナビゲーション装置100の角速度を検出するジャイロセンサ等の方位センサや、磁気を測定することによりナビゲーション装置100の絶対方位を検出する地磁気センサ等から構成され、ナビゲーション装置100の走行方向を検出し、検出した走行方向に基づく走行方向検出信号を制御部6に出力する。
【0022】
また、走行に応じたパルスを計測することにより走行距離を検出する走行距離検出センサを設け、当該走行距離検出センサ及び上述の方向検出部2により、現在位置検出手段を構成しても良い。
【0023】
通信部3は、例えば、情報提供装置200とネットワーク接続されており、情報提供装置200に対して、地図情報要求信号等の各種要求をネットワークNを介して送信するとともに、この要求に応じて、情報提供装置200から送信される地図情報等の各種情報を受信する。
【0024】
表示部4は、例えば、LCD(Liquid Crystal Display)等のディスプレイを備えて構成され、制御部6からの制御に応じて、地図情報その他の各種情報を当該ディスプレイに表示させる。
【0025】
入力部5は、例えば、文字/数字キー、各種機能キー、表示部4と一体的に構成されたタッチパネル等から構成され、ユーザによるキーの押下に基づくキー押下信号を制御部6に出力するとともに、タッチパネルにおいてユーザによりタッチ操作が行われると、当該タッチ操作された座標を算出し、算出した座標に基づく押下信号を制御部6に出力する。
【0026】
制御部6は、CPU(Central Processing Unit)61、RTC(Real Time Clock)62、メモリ部63、ROM(Read Only Memory)64等を備えて構成されている。
【0027】
CPU61は、ナビゲーション装置100の各部から入力された入力信号等に応じて、ROM64に格納された各種プログラムを実行するとともに、実行にかかるプログラムに基づいて各部に出力信号を出力することにより、ナビゲーション装置100の動作全般を統括制御する。
【0028】
RTC62は、現在時刻等の時間データを計時して、計時した時間データをCPU61に対して出力する。
【0029】
メモリ部63は、例えば、RAM(Random Access Memory)等の揮発性メモリからなるワークエリア631を備えており、CPU61によって各種プログラムが実行される際に生じる処理結果や、入力されたデータ等をこのワークエリア631に記憶させる。
【0030】
また、メモリ部63は、例えば、EPROM(Erasable Programmable ROM)等の不揮発性メモリからなるデータエリア632を備えている。データエリア632には、例えば、エリアコード記憶部632a及び地図情報記憶部(記憶部)632b等が備わる。
【0031】
エリアコード記憶部632aは、地図情報を構成するエリア単位の地図情報のそれぞれに付与されているエリアコードを記憶する。
図4は、エリアコード記憶部632aを例示する図である。図4に示すように、エリアコード記憶部632aは、都道府県単位に分割されたエリアのそれぞれに対して、エリアコードを割り当てて記憶するとともに、そのエリアが存する地方名、都道府県名、位置情報(緯度範囲・経度範囲)、隣接エリアのエリアコード等を相互に対応づけて記憶している。
【0032】
地図情報記憶部632bは、後述する地図情報取得プログラム64cの実行により、ネットワークNを介して情報提供装置200から取得された地図情報を記憶する。
【0033】
ROM64は、例えば、不揮発性メモリから成るプログラム格納エリアを有しており、現在位置検出プログラム64a、特定プログラム64b、地図情報取得プログラム64c、記憶制御プログラム64d、削除プログラム64e等を記憶する。
【0034】
現在位置検出プログラム64aは、例えば、CPU61に、現在位置Pを検出する機能を実現させるためのプログラムである。
具体的には、CPU61は、GPS測位部等から構成される現在位置検出部1に、ナビゲーション装置100自身の現在位置情報を取得させ、当該現在位置検出部1から出力される現在位置検出信号に基づいて、ナビゲーション装置100の現在位置Pとしての座標(緯度・経度)を特定する。さらに、特定される現在位置Pに基づいて、マップマッチング処理を行い、ナビゲーション装置100が搭載された車両が位置している道路を、データエリア632等の所定の領域に記憶されているマッチングデータ(図示省略)に基づいて特定する。マップマッチング処理では、例えば、車両の走行軌跡に応じて、マッチング候補となる道路を求め、マッチング候補から最も相関が高い道路を特定して、その道路上に現在位置Pをマッチングさせるパターンマッチング等を用いる。
CPU61は、かかる現在位置検出プログラム64aを実行することにより、現在位置検出部1とともに現在位置検出手段として機能する。
【0035】
特定プログラム64bは、例えば、CPU61に、ナビゲーション装置100の走行方向を特定する機能を実現させるためのプログラムである。
具体的には、CPU61は、地磁気センサや方位センサ等から構成される方向検出部2に、ナビゲーション装置100の走行方向を検出させ、当該方向検出部2から出力される走行方向検出信号に基づいて、ナビゲーション装置100の走行方向を特定する。
CPU61は、かかる特定プログラム64bを実行することにより、方向検出部2とともに特定手段として機能する。
【0036】
地図情報取得プログラム64cは、例えば、CPU61に、ネットワークNを介して所定のエリア単位に区画された地図情報を取得する機能を実現させるためのプログラムである。
具体的には、当該地図情報取得プログラム64cの実行において、CPU61は、走行中のエリアに隣接し、且つ、特定プログラム64bの実行により特定された走行方向に存在するエリアである接近エリアの地図情報を、現在位置Pと接近エリアまでの距離が所定値D以下になった場合に取得する。また、CPU61は、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在するか否かを判断し、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの地図情報を取得する。
CPU61は、かかる地図情報取得プログラム64cを実行することにより、判断手段、地図情報取得手段として機能する。
【0037】
ここで、まず、図5〜図7を参照しながら、当該地図情報取得プログラム64cの実行による、接近エリアの地図情報取得処理について説明する。
CPU61は、ナビゲーション装置100が搭載される車両の走行中、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定する。なお、図5〜図11において、マークPは、ナビゲーション装置100の現在位置Pを示しており、矢印は、ナビゲーション装置100の走行方向を示している。
CPU61は、現在位置Pとしての座標を特定すると、当該座標に基づいて、エリアコード記憶部632aを参照し、現在位置しているエリアを判定するとともに、現在のエリアに隣接する隣接エリアを判定する。図5の例では、エリアコード「6−3」の大阪府が現在のエリアと判定されるとともに、エリアコード「6−2」の京都府・「6−4」の奈良県・「6−5」の和歌山県・「6−6」の兵庫県の4つのエリアが隣接エリアと判定される。
そして、CPU61は、隣接エリアのうち、走行方向と特定された方向に存在する隣接エリアを特定し、これを接近エリアとする。図5の例では、エリアコード「6−6」の和歌山県が接近エリアであると特定される。
【0038】
次に、CPU61は、エリアコード記憶部632aの位置情報に基づいて、現在位置Pから接近エリアまでの距離を判定する。さらに、現在位置Pから接近エリア(例えば、和歌山県)までの距離を判定すると、当該距離が所定値D(例えば、30km)以下となったか否かを判断する。例えば、図6の例では、接近エリアまでの距離は所定値D以下となっていないと判断される。
その後、車両がさらに走行を継続して、例えば、図7のPに位置することとなった場合、接近エリアまでの距離は所定値D以下となったと判断される。すると、CPU61は、地図情報記憶部632bに、接近エリアの地図情報が記憶されているか否かを判断し、接近エリアの地図情報が記憶されていない場合には、当該接近エリアの地図情報を要求する地図情報要求信号を、通信部3により、ネットワークNを介して情報提供装置200に送信する。当該地図情報要求信号には、地図情報を取得したい接近エリアのエリアコードが含まれており、情報提供装置200では、当該地図情報要求信号を受信すると、これに含まれるエリアコードに基づいて、地図情報DB200bから、当該エリアコードが割り当てられたエリアの地図情報を読み出し、読み出した地図情報を、ネットワークNを介してナビゲーション装置100に送信する。このとき、ユーザ情報DB200cが参照されて、ナビゲーション装置100における表示サイズ・解像度の地図情報が送信される。そして、ナビゲーション装置100において、情報提供装置200から地図情報が送信されると、CPU61は、当該地図情報を通信部3により受信する。
【0039】
次に、図8及び図9を参照しながら、当該地図情報取得プログラム64cの実行による、現在位置Pの所定の第1範囲R1内に存在するエリアの地図情報取得処理について説明する。
CPU61は、前述したように、ナビゲーション装置100が搭載された車両の走行中に、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定すると、現在位置Pから所定の第1範囲R1内に、接近エリア以外のエリアがあるか否かを判断する。ここで、現在位置Pから所定の第1範囲R1は、走行方向に向かう、現在位置Pを中心とする半径25kmの半円領域であるものとし、図8において網目掛けされた部分である。なお、図8におけるPの位置は、図7におけるPの位置と同一であるものとして説明する。
例えば、図8の例では、現在位置Pから第1範囲R1内に、接近エリア以外のエリアは無いと判断される。その後、車両がさらに走行を継続して、例えば、図9のPに位置することとなった場合には、現在位置Pから第1範囲R1内に、接近エリア以外のエリア(例えば、エリアコード「6−4」の奈良県)があると判断され、当該エリアが、現在位置Pから第1範囲R1内に存在するエリアであると特定される。
【0040】
CPU61は、現在位置Pから第1範囲R1内に、接近エリア以外のエリアがあると判断すると、当該エリアの地図情報が、地図情報記憶部632bに記憶されているか否かを判断する。そして、当該エリアの地図情報が記憶されていない場合には、当該エリアの地図情報を要求する地図情報要求信号を、通信部3により、ネットワークNを介して情報提供装置200に送信する。すると、情報提供装置200では、前述の処理が行われて、地図情報DB200bから地図情報が読み出され、ネットワークNを介して、ナビゲーション装置100に送信される。そして、ナビゲーション装置100において、情報提供装置200から地図情報が送信されると、CPU61は、当該地図情報を通信部3において受信する。
【0041】
なお、現在位置Pから第1範囲R1は、図8及び図9に例示する半円領域に限られることなく、270度、360度等の円領域であっても良く、また、矩形領域・その他の多角形領域等であっても良い。
また、上述の説明では、接近エリアの地図情報を取得する所定値Dよりも第1範囲R1の距離を短く構成した。すなわち、図7・図8のPに位置している時点では、走行方向に存在する接近エリアの地図情報のみが取得され、さらに走行して、図9のPに位置することとなった時点で、走行方向に存在しない第1範囲R1内に存在するエリアの地図情報が取得されることとなる。したがって、走行方向に存在する、より走行する可能性の高い接近エリアの地図情報が優先的に取得されることとなり、地図情報取得の効率性がより向上することとなる。
【0042】
記憶制御プログラム64dは、例えば、CPU61に、地図情報取得プログラム64cの実行により取得された地図情報を地図情報記憶部632bに記憶させる機能を実現させるためのプログラムである。
具体的には、CPU61は、前述の地図情報取得プログラム64cの実行により、地図情報の要求に応じて、ナビゲーション装置100から地図情報が送信され、当該地図情報を通信部3において受信すると、受信した地図情報を地図情報記憶部632bに記憶させる。
CPU61は、かかる記憶制御プログラム64dを実行することにより、記憶制御手段として機能する。
【0043】
削除プログラム64eは、例えば、CPU61に、地図情報記憶部632bに記憶された地図情報のうち、現在位置検出プログラム64aの実行により検出される現在位置Pから所定の第2範囲R2以上離れた位置の地図情報を削除する機能を実現させるためのプログラムである。
CPU61は、かかる削除プログラム64eを実行することにより、削除手段として機能する。
【0044】
ここで、図10及び図11を参照しながら、当該削除プログラム64eの実行による、地図情報削除処理について説明する。
CPU61は、前述のように、ナビゲーション装置100が搭載される車両の走行中、前述の現在位置検出プログラム64aを実行して、ナビゲーション装置100の現在位置Pの座標(緯度・経度)を特定するとともに、前述の特定プログラム64bを実行し、ナビゲーション装置100の走行方向を特定する。
【0045】
ナビゲーション装置100の現在位置P及び走行方向を特定すると、CPU61は、現在位置Pから所定の第2範囲R2以内に存在するエリアを判定する。ここで、現在位置Pからの第2範囲R2は、走行方向と逆方向に向かう、現在位置Pを中心とする半径50kmの半円領域であるものとし、図10・図11において網目掛けされた部分である。
図10の例では、現在位置Pから所定の第2範囲R2内に存在するエリアは、エリアコード「6−3」の大阪府及び「6−4」の奈良県であると判定される。そして、CPU61は、所定の第2範囲R2内に存在するエリア以外のエリア(例えば、「6−1」の滋賀県、「6−2」の京都府、「6−6」の兵庫県等)の地図情報が、地図情報記憶部632bに記憶されているかを判断し、記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。なお、図10の時点では、所定の第2範囲R2以内に存在するエリア以外のエリアの地図情報は、既に削除されている。
そして、その後、車両がさらに走行を継続して、例えば、図11のPに位置することとなった時点において、「6−3」の大阪府が現在位置Pから所定の第2範囲R2内に存在するエリアから外れ、現在位置Pから所定の第2範囲R2内に存在するエリアが「6−4」の奈良県のみであると判定されると、CPU61は、当該「6−3」の地図情報が、地図情報記憶部632bに記憶されているかを判断し、記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。
【0046】
なお、現在位置Pから第2範囲R2は、図10及び図11に例示する半円領域に限られることなく、270度、360度等の円領域であっても良く、また、矩形領域・その他の多角形領域等であっても良い。
【0047】
次に、図12のフローチャートを参照しながら、CPU61により実行される地図情報取得・削除処理について説明する。
まず、ステップS1において、CPU61は、現在位置検出部1から出力される現在位置検出信号に基づいて、ナビゲーション装置100の現在位置Pを特定する。次に、ステップS2において、現在位置Pから所定の第2範囲R2内に存在するエリア以外のエリアの地図情報が、地図情報記憶部632bに記憶されている場合には、当該地図情報を地図情報記憶部632bから削除する。
【0048】
ステップS3において、CPU61は、方向検出部2から出力される走行方向検出信号に基づいて、ナビゲーション装置100の走行方向を特定し、ステップS4において、エリアコード記憶部632aを参照して、特定した現在位置P及び走行方向に基づいて、隣接エリア及び接近エリアを特定する。ステップS5において、CPU61は、現在位置Pから接近エリアまでの距離が、所定値D以下となったか否かを判断する。CPU61は、ステップS5において、現在位置Pから接近エリアまでの距離が所定値D以下となっていないと判断すると(ステップS5;No)、ステップS8に進み、一方、現在位置Pから接近エリアまでの距離が所定値D以下となったと判断すると(ステップS5;Yes)、ステップS6に進む。
ステップS6において、CPU61は、接近エリアの地図情報は、地図情報記憶部632bに記憶されているか否かを判断する。CPU61は、ステップS6において、接近エリアの地図情報は地図情報記憶部632bに記憶されていると判断すると(ステップS6;Yes)、ステップS1に戻って以上の処理を繰り返し、一方、地図情報記憶部632bに記憶されていないと判断すると(ステップS6;No)、ステップS7において、接近エリアの地図情報を要求する地図情報要求信号を、ネットワークNを介して情報提供装置200に送信する。そして、当該地図情報要求信号に基づいて情報提供装置200から送信される接近エリアの地図情報を通信部3において取得し、ステップS1に戻って以上の処理を繰り返す。
【0049】
ステップS8において、CPU61は、現在位置Pから所定の第1範囲R1内に、接近エリア以外のエリアがあるか否かを判断する。そして、現在位置Pから所定の第1範囲R1内に接近エリア以外のエリアがないと判断すると(ステップS8;No)、ステップS1に戻って以上の処理を繰り返し、一方、現在位置Pから所定の第1範囲R1内に接近エリア以外のエリアがあると判断すると(ステップS8;Yes)、ステップS9に進む。
ステップS9において、CPU61は、現在位置Pから第1範囲R1内に存在する接近エリア以外のエリアの地図情報は、地図情報記憶部632bに記憶されているか否かを判断する。CPU61は、ステップS9において、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報は地図情報記憶部632bに記憶されていると判断すると(ステップS9;Yes)、ステップS1に戻って以上の処理を繰り返し、一方、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報は地図情報記憶部632bに記憶されていないと判断すると(ステップS9;No)、ステップS10において、当該所定の第1範囲R1内に存在する接近エリア以外のエリアの地図情報を要求する地図情報要求信号を、ネットワークNを介して情報提供装置200に送信する。そして、当該地図情報要求信号に基づいて情報提供装置200から送信される地図情報を通信部3において取得し、ステップS1に戻って以上の処理を繰り返す。
【0050】
以上説明した本実施形態のナビゲーション装置100によれば、CPU61による現在位置検出プログラム64aの実行により、現在位置Pが検出され、特定プログラム64bの実行により、ナビゲーション装置100の走行方向が特定され、地図情報取得プログラム64cの実行により、ネットワークNを介して所定のエリア単位に区画された地図情報が取得され、記憶制御プログラム64dの実行により、地図情報取得プログラム64cの実行により取得された地図情報が地図情報記憶部632bに記憶され、地図情報取得プログラム64cの実行により、走行中のエリアに隣接し、且つ特定プログラム64bの実行により特定された走行方向に存在するエリアである接近エリアの地図情報が取得される。
したがって、ネットワークNを介してダウンロードした地図情報を用いるナビゲーション装置100において、走行方向に存在する隣接エリアの地図情報が取得されることとなるため、地図情報の取得をより効率的に行うことができる。
【0051】
また、CPU61による地図情報取得プログラム64cの実行により、接近エリアの地図情報は、現在位置Pと接近エリアまでの距離が所定値D以下になった場合に取得される。
したがって、適切な距離を所定値Dとして設定した場合には、より確実に接近エリアの地図情報を取得することができるとともに、地図情報の取得をさらに効率的に行うことができる。
【0052】
また、CPU61による地図情報取得プログラム64cの実行により、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在するか否かが判断され、現在位置Pから所定の第1範囲R1内に、地図情報記憶部632bに地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの地図情報が取得される。
したがって、接近エリアとされたエリアと異なるエリアの方向に走行方向が変わった場合であっても、予め当該エリアの地図情報を効率的に取得しておくことができる。
【0053】
さらに、CPU61による削除プログラム64eの実行により、地図情報記憶部632bに記憶された地図情報のうち、現在位置検出プログラム64aの実行により検出される現在位置Pから所定の第2範囲R2以上離れた位置の地図情報が削除される。
したがって、地図情報記憶部632に、使用する可能性の高い地図情報のみを記憶させることができることとなって、地図情報記憶部632の記憶容量をより小さく構成できることとなり、全地域の地図を保持する場合よりも地図情報の検索速度を向上させることができるとともに、低コストで構成できることとなる。
【0054】
なお、本発明は、上記実施の形態に限られることなく、本発明の趣旨を逸脱しない範囲において、種々の改良並びに設計の変更を行っても良い。
例えば、上記実施形態では、一部の地域における地図情報取得・削除処理の説明を行ったが、より広い範囲又は狭い範囲での移動に対応する構成であっても良い。
【図面の簡単な説明】
【0055】
【図1】本実施形態におけるナビゲーション装置の全体構成を例示するブロック図である。
【図2】本実施形態のナビゲーション装置の全体構成を例示するブロック図である。
【図3】地図情報を例示する図である。
【図4】エリアコード記憶部を例示する図である。
【図5】接近エリアの地図情報取得処理を説明するための図である。
【図6】接近エリアの地図情報取得処理を説明するための図である。
【図7】接近エリアの地図情報取得処理を説明するための図である。
【図8】現在位置の所定の第1範囲内に存在するエリアの地図情報取得処理を説明するための図である。
【図9】現在位置の所定の第1範囲内に存在するエリアの地図情報取得処理を説明するための図である。
【図10】地図情報削除処理を説明するための図である。
【図11】地図情報削除処理説明するための図である。
【図12】地図情報取得・削除処理を示すフローチャートである。
【符号の説明】
【0056】
100 ナビゲーション装置
1 現在位置検出部(現在位置検出手段)
2 方向検出部(特定手段)
3 通信部(地図情報取得手段)
61 CPU(現在位置検出手段、特定手段、地図情報取得手段、記憶制御手段、判断手段、削除手段)
632b 記憶部(地図情報取得手段)
64a 現在位置検出プログラム(現在位置検出手段)
64b 特定プログラム(特定手段)
64c 地図情報取得プログラム(地図情報取得手段、判断手段)
64d 記憶制御プログラム(記憶制御手段)
64e 削除プログラム(削除手段)
N ネットワーク
【特許請求の範囲】
【請求項1】
現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を取得することを特徴とするナビゲーション装置。
【請求項2】
前記地図情報取得手段は、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に、当該接近エリアの前記地図情報を取得することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段を備え、
前記地図情報取得手段は、前記判断手段により、前記現在位置から所定の第1範囲内に、前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項4】
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段を備えることを特徴とする請求項1〜3の何れか一項に記載のナビゲーション装置。
【請求項5】
現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段と、
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に取得するとともに、前記判断手段により、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とするナビゲーション装置。
【請求項1】
現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を取得することを特徴とするナビゲーション装置。
【請求項2】
前記地図情報取得手段は、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に、当該接近エリアの前記地図情報を取得することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段を備え、
前記地図情報取得手段は、前記判断手段により、前記現在位置から所定の第1範囲内に、前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とする請求項1又は2に記載のナビゲーション装置。
【請求項4】
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段を備えることを特徴とする請求項1〜3の何れか一項に記載のナビゲーション装置。
【請求項5】
現在位置を検出する現在位置検出手段を備えるナビゲーション装置において、
当該ナビゲーション装置の走行方向を特定する特定手段と、
ネットワークを介して所定のエリア単位に区画された地図情報を取得する地図情報取得手段と、
前記地図情報取得手段により取得された前記地図情報を記憶部に記憶させる記憶制御手段と、
前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在するか否かを判断する判断手段と、
前記記憶部に記憶された前記地図情報のうち、前記現在位置検出手段により検出される現在位置から所定の第2範囲以上離れた位置の地図情報を削除する削除手段と、
を備え、
前記地図情報取得手段は、走行中のエリアに隣接し、且つ前記特定手段により特定された走行方向に存在するエリアである接近エリアの前記地図情報を、前記現在位置と前記接近エリアまでの距離が所定値以下になった場合に取得するとともに、前記判断手段により、前記現在位置から所定の第1範囲内に、前記記憶部に前記地図情報が記憶されていないエリアが存在すると判断された場合に、当該エリアの前記地図情報を取得することを特徴とするナビゲーション装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】

【図9】

【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−286676(P2008−286676A)
【公開日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願番号】特願2007−132791(P2007−132791)
【出願日】平成19年5月18日(2007.5.18)
【出願人】(000201113)船井電機株式会社 (7,855)
【Fターム(参考)】
【公開日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願日】平成19年5月18日(2007.5.18)
【出願人】(000201113)船井電機株式会社 (7,855)
【Fターム(参考)】
[ Back to top ]