
ナビゲーション装置
【課題】目的地までの運転が容易になる経路を探索するナビゲーション装置を提供する。
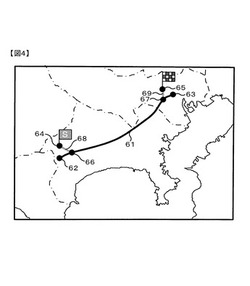
【解決手段】符号62は運転者が過去に通過した経路61の始点を示し、符号63は経路61の終点を示す。符号64は運転者が設定した出発地、符号65は運転者が設定した目的地を示す。符号66は、出発地64の周辺における経路61上の所定位置を示し、符号67は、目的地65の周辺における経路61上の所定位置を示す。ナビゲーション装置1が探索する出発地64から目的地65に至る経路は、経路68と、所定位置66および所定位置67の間の経路61と、経路69とを結合したものとなる。経路68は、出発地64と所定位置66との間の推奨経路である。経路69は、所定位置67と目的地65との間の推奨経路である。
【解決手段】符号62は運転者が過去に通過した経路61の始点を示し、符号63は経路61の終点を示す。符号64は運転者が設定した出発地、符号65は運転者が設定した目的地を示す。符号66は、出発地64の周辺における経路61上の所定位置を示し、符号67は、目的地65の周辺における経路61上の所定位置を示す。ナビゲーション装置1が探索する出発地64から目的地65に至る経路は、経路68と、所定位置66および所定位置67の間の経路61と、経路69とを結合したものとなる。経路68は、出発地64と所定位置66との間の推奨経路である。経路69は、所定位置67と目的地65との間の推奨経路である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地までの経路を探索し、その経路にしたがって車両が走行するように経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
自車位置から運転者の知っている道路までの経路を探索し、その道路までの経路案内を行うナビゲーション装置が従来技術として知られている(たとえば、特許文献1)。
【特許文献1】特開2005−147694号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
自車位置から運転者が知っている道路まででなく、さらに運転者が知っている道路から目的地までナビゲーション装置が経路探索を行ってくれると、非常に便利である。
【課題を解決するための手段】
【0004】
(1)請求項1の発明のナビゲーション装置は、車両が走行した経路の履歴を記憶する履歴記憶手段と、出発地から目的地までの経路を探索する探索手段と、探索手段によって探索した経路にしたがって車両が走行するように経路案内を行う経路案内手段とを備え、探索手段は、履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(2)請求項2の発明は、請求項1に記載のナビゲーション装置において、探索手段は、履歴記憶手段に記憶されている記憶経路の中で、出発地から第1の距離以内に記憶経路の始点が存在し、目的地から第2の距離以内に記憶経路の終点が存在する記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(3)請求項3の発明は、請求項2に記載のナビゲーション装置において、履歴記憶手段は、車両が走行した経路とともに経路を走行したときの時間に関する情報を記憶し、履歴記憶手段により記憶されている記憶経路の走行した時間に関する情報を表示モニタに表示し、履歴記憶手段により記憶されている記憶経路の中から、表示された走行した時間に関する情報の中から選択された走行した時間に関する情報に係る記憶経路を選択する経路選択手段を備え、探索手段は、出発地から第1の距離以内に記憶経路の始点が存在し、目的地から第2の距離以内に記憶経路の終点が存在する記憶経路が複数ある場合、複数の記憶経路の中から経路選択手段により選択された記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(4)請求項4の発明は、請求項2または3に記載のナビゲーション装置において、出発地と目的地との間の距離に基づいて、第1の距離および第2の距離を算出する距離算出手段を備えることを特徴とする。
(5)請求項5の発明は、請求項1乃至4のいずれか1項に記載のナビゲーション装置において、記憶経路の始点を中心とした第3の距離を半径とする円と記憶経路との間の第1の交点、および記憶経路の終点を中心とした第4の距離を半径とする円と記憶経路との間の第2の交点を算出する交点算出手段を備え、探索手段は、出発地と第1の交点との間の第1の推奨経路、および第2の交点と目的地との間の第2の推奨経路を探索し、第1の推奨経路と、第1の交点および第2の交点の間の記憶経路と、第2の推奨経路とを結合することにより、出発地から目的地までの経路を探索することを特徴とする。
(6)請求項6の発明は、請求項5に記載のナビゲーション装置において、出発地と目的地との間の距離に基づいて、第3の距離および第4の距離を算出する半径算出手段を備えることを特徴とする。
(7)請求項7の発明は、請求項1乃至6のいずれか1項に記載のナビゲーション装置において、表示モニタに表示された探索条件より選択された探索条件を選択する探索条件選択手段を備え、探索手段は、探索条件選択手段により所定の探索条件が選択された場合、履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とする。
【発明の効果】
【0005】
本発明のナビゲーション装置によれば、車両が走行した経路の履歴を記憶し、記憶されている経路の一部または全部を通過する出発地から目的地までの経路を探索し、探索した経路にしたがって前記車両が走行するように経路案内を行うようにした。したがって、運転者は、知っている道路を通過して目的地まで到達できるので、目的地までの運転が容易になる。
【発明を実施するための最良の形態】
【0006】
図1は、本発明の実施形態によるナビゲーション装置1を示す。このナビゲーション装置1は、運転者の知っている経路、つまり運転者が過去に通ったことがある経路の一部または全部を通過して目的地に到達する経路を探索することができる。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、VICS(登録商標)(道路交通情報システム)情報受信部19、データ記憶部110およびディスクドライブ111を有している。ディスクドライブ111には、地図データが記憶されたDVD−ROM112が装填されている。
【0007】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。この制御回路11がDVD−ROM112に記憶された地図データに基づいて所定の経路探索処理を行うと、その処理結果が推奨経路として表示モニタ16に表示される。
【0008】
現在地検出装置14は車両の現在地を検出する装置である。現在地装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲や経路探索開始点などを決定するとともに、地図上にその現在地を表示する。
【0009】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはDVD−ROM112に記憶された地図データに基づいて、適宜生成される。ナビゲーション装置1は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0010】
ディスクドライブ111は、DVD−ROM112から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクの旅行時間(以下、リンク旅行時間)の情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、運転者の要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM112以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0011】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の道路地図などの各種情報を画面表示として運転者に提供する。スピーカ17は、各種入力操作を運転者に指示したり、経路案内したりするための音声を出力する。入力装置18は、運転者が各種コマンドを設定するための入力スイッチを有し、操作パネルやリモコンなどによって実現される。運転者は、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0012】
目的地が運転者により設定されると、ナビゲーション装置1はGPSセンサ14cにより検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。たとえば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。このような経路演算を以下、経路探索と呼ぶ。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、運転者は地図上の推奨経路を画面上で認識することができる。ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、運転者に対して画面や音声などによる進行方向指示を行い、車両を経路案内する。
【0013】
VICS情報受信部19は、図示しないVICS情報センタから提供される渋滞情報などのVICS情報を受信し、制御回路11に出力する。このVICS情報は主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって送信される。電波ビーコンや光ビーコンは設置地付近を通過する車両に対してVICS情報を送信し、FM多重放送はそれらよりも広域の通信エリアをカバーする。ナビゲーション装置1は、これらによって送信されたVICS情報をVICS情報受信部19により受信する。
【0014】
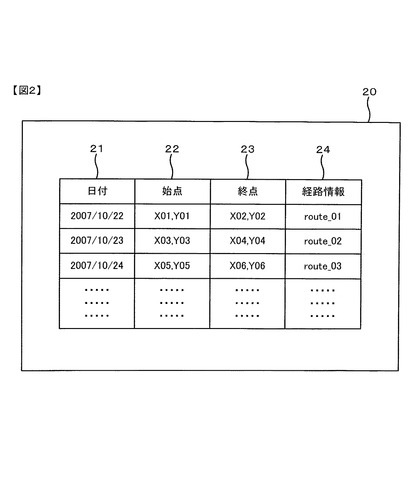
データ記憶部110は、フラッシュメモリやハードディスクなどの書き換え可能な不揮発性記録媒体によって構成され、ナビゲーション装置1の機能に必要なデータを記憶する。また、データ記憶部110は、車両の走行履歴を履歴データとして記憶する。図2を参照して、履歴データ20の構成を説明する。履歴データ20は、車両の走行履歴を記憶した日付21、走行を開始した地点である始点22、走行を終了した地点である終点23、およびに車両が走行して経路についての経路情報24を有する。経路情報24には、車両が走行した経路のリンクIDの情報が含まれる。
【0015】
現在地検出装置14が検出した車両の現在地をDVD−ROM112に記録された地図データと照合し、車両の現在地に対応するリンクを逐次検出する。その検出したリンクに係るリンクIDをデータ記憶部110に記憶することにより、履歴データ20を作成する。
【0016】
次に、図3を参照して、本発明の一実施形態におけるナビゲーション装置1の経路探索の操作について説明する。
【0017】
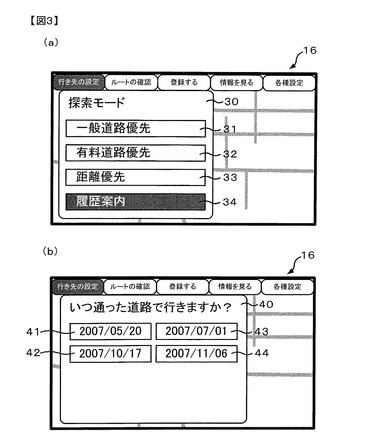
図3(a)は、探索モード画面30を説明するための図である。運転者が経路探索を行うための出発地と目的地とを設定すると、探索条件を表示した探索モード画面30が表示モニタ16に表示される。探索モード画面30には、一般道路優先欄31、有料道路優先欄32、距離優先欄33および履歴案内欄34が表示される。運転者は、入力装置18を操作して、一般道路優先欄31、有料道路優先欄32、距離優先欄33および履歴案内欄34の中から所望の探索条件を選択することができる。これにより、運転者は、所望の探索条件で経路探索をナビゲーション装置1に実行させることができる。
【0018】
運転者が一般道路優先欄31を選択すると、ナビゲーション装置1は、有料道路を通過しないで目的地まで到達する経路を探索する。運転者が有料道路優先欄32を選択すると、ナビゲーション装置1は、適切に有料道路を通過して目的地まで到達できる場合、有料道路を使用して目的地まで到達する経路を探索する。運転者が距離優先欄33を選択すると、ナビゲーション装置1は、目的地まで最短距離で到達できる経路を探索する。運転者が履歴案内欄34を選択すると、ナビゲーション装置1は、運転者が過去に通過した経路の一部または全部を通過する経路を探索する。
【0019】
運転者が履歴案内欄34を選択すると、図3(b)に示すように、運転者が過去に通過した経路の中で、再び通過する経路を選択する通過経路選択画面40が表示される。通過経路選択画面40には、データ記憶部110に車両の走行履歴が記録された日付21、つまり運転者が経路を通過した日付41〜43が表示される。運転者が日付41〜43の中で所望の日付を選択すると、選択された日付の日に通過した経路の一部または全部を通過して目的地まで到達する経路が探索される。
【0020】
図4を参照して、運転者が過去に通過した経路の一部または全部を通過する経路について説明する。符号61は、運転者が過去に通過した経路を示す。符号62は経路61の始点を示し、符号63は終点を示す。符号64は運転者がナビゲーション装置1に設定した出発地、符号65は運転者がナビゲーション装置1に設定した目的地を示す。符号66は、出発地64の周辺における経路61上の所定位置を示し、符号67は、目的地65の周辺における経路61上の所定位置を示す。所定位置の具体的内容については後述する。
【0021】
ナビゲーション装置1が探索する出発地64から目的地65に至る経路は、経路68と、所定位置66および所定位置67の間の経路61と、経路69とを結合したものとなる。経路68は、出発地64と所定位置66との間の推奨経路である。経路69は、所定位置67と目的地65との間の推奨経路である。ナビゲーション装置1は、出発地64から目的地65に至る経路を探索した後、出発地から目的地の間の推奨経路と同様に、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別してその経路を画面表示する。また、ナビゲーション装置1は、この経路にしたがって車両が走行できるように、運転者に対して画面や音声などによる進行方向指示を行い、車両を経路案内する。
【0022】
次に、本発明の一実施形態における経路の探索処理について図5および図6のフローチャートを参照して説明する。図5および図6の処理は、探索モード画面30から履歴案内欄34が選択されるとスタートするプログラムであり、制御回路11により実行される。
【0023】
ステップS501では、ナビゲーション装置1に設定された出発地と目的地との間の距離を算出する。ステップS502では、判定円の半径を算出する。この判定円は、運転者が過去に通過した経路の中で、一部または全部を通過する経路を選択するために使用する。また、判定円は、上述の経路61上の所定位置66,67を算出するときにも使用する。判定円の半径は、出発地と目的地との間の距離の0.5%以上、1%以下の長さであることが好ましい。
【0024】
ステップS503では、ナビゲーション装置1に設定された出発地を中心とした判定円内に存在する履歴データ20における始点22を抽出する。ステップS504では、抽出した始点22に対応する終点23の中で、目的地を中心とした判定円内に存在する終点23を抽出する。ステップS505では、抽出した始点22および終点23に対応する日付21を抽出する。ステップS506では、表示モニタ16の表示画面に通過経路選択画面40を表示し、抽出した日付を通過経路選択画面40に表示する。ステップS507では、通過経路選択画面40から選択された日付に係る経路A(図4の経路61に相当)を抽出する。
【0025】
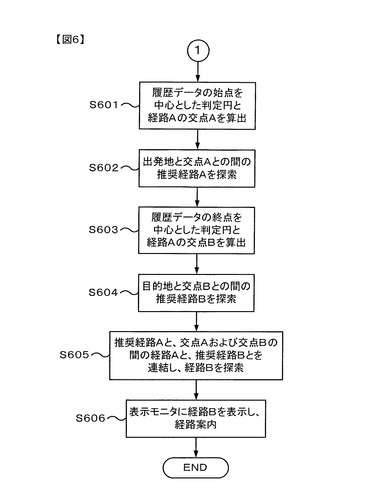
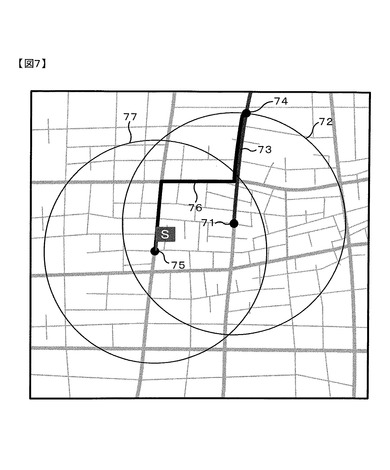
図6のステップS601では、図7に示すように、履歴データ20の始点71を中心とした判定円72と経路A73との交点A74(図4の点66に相当)を算出する。ステップS602では、図7に示すように、出発地75と交点A74との間の推奨経路A76(図4の経路68に相当)を探索する。ここで、符号77は、出発地75を中心とする判定円を示す。
【0026】
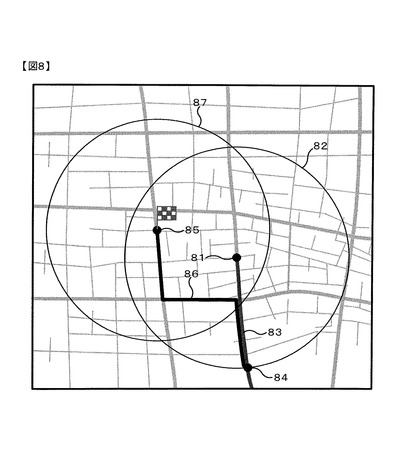
ステップS603では、図8に示すように、履歴データ20の終点81を中心とした判定円82と経路A83との交点B84(図4の点67に相当)を算出する。ステップS604では、図8に示すように、目的地85と交点B84との間の推奨経路B86(図4の経路69に相当)を探索する。ここで、符号87は、目的地75を中心とする判定円を示す。
【0027】
ステップS605では、推奨経路A76と、交点A74および交点B84の間の経路A73,83と、推奨経路B86とを連結し、経路Bを探索する。ステップS606では、表示モニタ16に経路Bを表示し、経路Bにしたがって車両が走行できるように、経路案内を行う。
【0028】
以上の実施形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)車両が走行した経路の履歴を履歴データ20として記憶し、履歴データ20における経路の一部または全部を通過する出発地から目的地までの経路を探索し、探索した経路にしたがって車両が走行するように経路案内を行うようにした。したがって、運転者は、知っている道路を通過して目的地まで到達できるので、目的地までの運転が容易になる。
【0029】
(2)履歴データ20の経路の中から、出発地から所定距離以内に始点が存在し、目的地から所定距離以内に終点が存在する経路を選択し、その経路の一部または全部を通過する経路を探索するようにした。これにより、履歴データ20の経路の中から、出発地と運転者の知っている経路との間があまり離れていない、および運転者の知っている経路と目的地との間があまり離れていない適切な経路を抽出することができる。さらに、そのような適切な経路を迅速に抽出することができる。
【0030】
(3)履歴データ20における経路の日付を表示モニタ16に表示し、表示された日付の中から運転者が選択した日付の経路の一部または全部を通過する経路を探索するようにした。これにより、運転者は、過去の記憶を手がかりにして運転者が運転しやすいと思う経路を複数の経路の中から選択することができる。
【0031】
(4)履歴データ20の経路の中から経路を抽出するときに使用する判定円の半径を出発地と目的地との間の距離に基づいて算出するようにした。これにより、履歴データ20の経路の中から、出発地から目的地に移動するときに通過するのに適切な経路を選択することができる。出発地と目的地との間の距離に比べて履歴データ20の中の経路が離れていると、運転者が運転しやすい経路を通過するというメリットより、目的地に到達する時間が長くなるというデメリットの方が大きくなるので、出発地と経路の始点との間の距離および目的地と経路の終点との間の距離は、出発地と目的地との間の距離の1%以下であることが好ましい。また、履歴データ20の中の始点および終点が、出発地および目的地と一致しない場合であっても運転者が知っている経路を通過して目的地に到達できるようにするため、出発地と経路の始点との間の距離および目的地と経路の終点との間の距離は、出発地と目的地との間の距離の0.5%以上であることが好ましい。
【0032】
(5)履歴データ20の始点71を中心にした判定円72と経路A73との交点A74を算出し、出発地75と交点A74との間の推奨経路A76を探索し、履歴データ20の終点81を中心にした判定円82と経路A83との交点B84を算出し、目的地85と交点B84との間の推奨経路B86を探索した。そして、推奨経路A76と、交点A74および交点B84の間の経路A73,83と、推奨経路B86とを連結し、出発地から目的地までの経路を探索するようにした。これにより、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できる。
【0033】
(6)交点A74および交点B84を算出するときに使用する判定円の半径を出発地と目的地との間の距離に基づいて算出するようにした。これにより、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できる交点A74および交点B84を算出することができる。出発地75から運転者の知っている経路73に速やかに移動でき、運転者の知っている経路83から目的地85に速やかに移動できることが好ましいので、判定円の半径は、出発地と目的地との間の距離の1%以下であることが好ましい。また、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できるようにするため、判定円の半径は、出発地と目的地との間の距離の0.5%以上であることが好ましい。
【0034】
(7)経路探索を行うときの探索条件を表した探索モード画面30が表示モニタ16に表示され、探索モード画面30に表示された履歴案内欄34が運転者により選択されると、運転者が過去に通過した経路の一部または全部を通過する経路が探索されるようにした。これにより、運転者が遠回りしても知っている道路を通過したい場合に、運転者が過去に通過した経路の一部または全部を通過する経路が探索されるようにすることができる。
【0035】
以上の実施の形態のナビゲーション装置1を次のように変形することができる。
(1)履歴データ20の中から経路を抽出するための使用した、出発地を中心とした判定円の半径および目的地を中心とした判定円の半径、経路と判定円との間の交点を算出するために使用した、始点を中心とした判定円の半径および終点を中心とした判定円の半径は、すべて同じ距離であったが、適宜変更するようにしてもよい。
【0036】
(2)表示モニタ16に表示し、運転者が選択する情報は、運転者が過去に経路を走行したときの時間に関する情報であれば、日付に限定されない。たとえば、「先週の日曜日」など、走行した時間に関する情報として曜日を表示し、選択できるようにしてもよい。これにより、運転者は、過去の記憶を手がかりにして運転者が運転しやすいと思う経路を複数の経路の中から選択することができる。
【0037】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0038】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【0039】
特許請求の範囲の要素と実施の形態との対応関係を説明する。
本願発明の履歴記憶手段はデータ記憶部110に対応し、探索手段は制御回路11に対応する。経路案内手段は制御回路11、表示モニタ16およびスピーカ17に対応し、経路選択手段は制御回路11、表示モニタ16および入力装置18に対応する。距離算出手段、交点算出手段および半径算出手段は制御回路11に対応し、探索条件選択手段は制御回路11、表示モニタ16および入力装置18に対応する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素の対応関係になんら限定されるものではない。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態のナビゲーション装置の構成を示すブロック図である。
【図2】履歴データを説明するための図である。
【図3】本発明の一実施形態におけるナビゲーション装置1の経路探索の操作を説明するための図である。
【図4】運転者が過去に通過した経路の一部または全部を通過する経路を説明するための図である。
【図5】本発明の一実施形態における経路の探索処理を説明するためのフローチャートである。
【図6】本発明の一実施形態における経路の探索処理を説明するためのフローチャートである。
【図7】出発地と、運転者が過去に通過した経路との間の推奨経路の探索を説明するための図である。
【図8】運転者が過去に通過した経路と、目的地との間の推奨経路の探索を説明するための図である。
【符号の説明】
【0041】
1 ナビゲーション装置
11 制御回路
16 表示モニタ
17 スピーカ
18 入力装置
20 履歴データ
110 データ記憶部
【技術分野】
【0001】
本発明は、目的地までの経路を探索し、その経路にしたがって車両が走行するように経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
自車位置から運転者の知っている道路までの経路を探索し、その道路までの経路案内を行うナビゲーション装置が従来技術として知られている(たとえば、特許文献1)。
【特許文献1】特開2005−147694号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
自車位置から運転者が知っている道路まででなく、さらに運転者が知っている道路から目的地までナビゲーション装置が経路探索を行ってくれると、非常に便利である。
【課題を解決するための手段】
【0004】
(1)請求項1の発明のナビゲーション装置は、車両が走行した経路の履歴を記憶する履歴記憶手段と、出発地から目的地までの経路を探索する探索手段と、探索手段によって探索した経路にしたがって車両が走行するように経路案内を行う経路案内手段とを備え、探索手段は、履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(2)請求項2の発明は、請求項1に記載のナビゲーション装置において、探索手段は、履歴記憶手段に記憶されている記憶経路の中で、出発地から第1の距離以内に記憶経路の始点が存在し、目的地から第2の距離以内に記憶経路の終点が存在する記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(3)請求項3の発明は、請求項2に記載のナビゲーション装置において、履歴記憶手段は、車両が走行した経路とともに経路を走行したときの時間に関する情報を記憶し、履歴記憶手段により記憶されている記憶経路の走行した時間に関する情報を表示モニタに表示し、履歴記憶手段により記憶されている記憶経路の中から、表示された走行した時間に関する情報の中から選択された走行した時間に関する情報に係る記憶経路を選択する経路選択手段を備え、探索手段は、出発地から第1の距離以内に記憶経路の始点が存在し、目的地から第2の距離以内に記憶経路の終点が存在する記憶経路が複数ある場合、複数の記憶経路の中から経路選択手段により選択された記憶経路の一部または全部を通過する経路を探索することを特徴とする。
(4)請求項4の発明は、請求項2または3に記載のナビゲーション装置において、出発地と目的地との間の距離に基づいて、第1の距離および第2の距離を算出する距離算出手段を備えることを特徴とする。
(5)請求項5の発明は、請求項1乃至4のいずれか1項に記載のナビゲーション装置において、記憶経路の始点を中心とした第3の距離を半径とする円と記憶経路との間の第1の交点、および記憶経路の終点を中心とした第4の距離を半径とする円と記憶経路との間の第2の交点を算出する交点算出手段を備え、探索手段は、出発地と第1の交点との間の第1の推奨経路、および第2の交点と目的地との間の第2の推奨経路を探索し、第1の推奨経路と、第1の交点および第2の交点の間の記憶経路と、第2の推奨経路とを結合することにより、出発地から目的地までの経路を探索することを特徴とする。
(6)請求項6の発明は、請求項5に記載のナビゲーション装置において、出発地と目的地との間の距離に基づいて、第3の距離および第4の距離を算出する半径算出手段を備えることを特徴とする。
(7)請求項7の発明は、請求項1乃至6のいずれか1項に記載のナビゲーション装置において、表示モニタに表示された探索条件より選択された探索条件を選択する探索条件選択手段を備え、探索手段は、探索条件選択手段により所定の探索条件が選択された場合、履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とする。
【発明の効果】
【0005】
本発明のナビゲーション装置によれば、車両が走行した経路の履歴を記憶し、記憶されている経路の一部または全部を通過する出発地から目的地までの経路を探索し、探索した経路にしたがって前記車両が走行するように経路案内を行うようにした。したがって、運転者は、知っている道路を通過して目的地まで到達できるので、目的地までの運転が容易になる。
【発明を実施するための最良の形態】
【0006】
図1は、本発明の実施形態によるナビゲーション装置1を示す。このナビゲーション装置1は、運転者の知っている経路、つまり運転者が過去に通ったことがある経路の一部または全部を通過して目的地に到達する経路を探索することができる。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、VICS(登録商標)(道路交通情報システム)情報受信部19、データ記憶部110およびディスクドライブ111を有している。ディスクドライブ111には、地図データが記憶されたDVD−ROM112が装填されている。
【0007】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。この制御回路11がDVD−ROM112に記憶された地図データに基づいて所定の経路探索処理を行うと、その処理結果が推奨経路として表示モニタ16に表示される。
【0008】
現在地検出装置14は車両の現在地を検出する装置である。現在地装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲や経路探索開始点などを決定するとともに、地図上にその現在地を表示する。
【0009】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはDVD−ROM112に記憶された地図データに基づいて、適宜生成される。ナビゲーション装置1は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0010】
ディスクドライブ111は、DVD−ROM112から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクの旅行時間(以下、リンク旅行時間)の情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、運転者の要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM112以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0011】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の道路地図などの各種情報を画面表示として運転者に提供する。スピーカ17は、各種入力操作を運転者に指示したり、経路案内したりするための音声を出力する。入力装置18は、運転者が各種コマンドを設定するための入力スイッチを有し、操作パネルやリモコンなどによって実現される。運転者は、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0012】
目的地が運転者により設定されると、ナビゲーション装置1はGPSセンサ14cにより検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。たとえば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。このような経路演算を以下、経路探索と呼ぶ。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、運転者は地図上の推奨経路を画面上で認識することができる。ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、運転者に対して画面や音声などによる進行方向指示を行い、車両を経路案内する。
【0013】
VICS情報受信部19は、図示しないVICS情報センタから提供される渋滞情報などのVICS情報を受信し、制御回路11に出力する。このVICS情報は主に高速道路上に設置されている電波ビーコンや、主に一般道路上に設置されている光ビーコン、またはFM多重放送によって送信される。電波ビーコンや光ビーコンは設置地付近を通過する車両に対してVICS情報を送信し、FM多重放送はそれらよりも広域の通信エリアをカバーする。ナビゲーション装置1は、これらによって送信されたVICS情報をVICS情報受信部19により受信する。
【0014】
データ記憶部110は、フラッシュメモリやハードディスクなどの書き換え可能な不揮発性記録媒体によって構成され、ナビゲーション装置1の機能に必要なデータを記憶する。また、データ記憶部110は、車両の走行履歴を履歴データとして記憶する。図2を参照して、履歴データ20の構成を説明する。履歴データ20は、車両の走行履歴を記憶した日付21、走行を開始した地点である始点22、走行を終了した地点である終点23、およびに車両が走行して経路についての経路情報24を有する。経路情報24には、車両が走行した経路のリンクIDの情報が含まれる。
【0015】
現在地検出装置14が検出した車両の現在地をDVD−ROM112に記録された地図データと照合し、車両の現在地に対応するリンクを逐次検出する。その検出したリンクに係るリンクIDをデータ記憶部110に記憶することにより、履歴データ20を作成する。
【0016】
次に、図3を参照して、本発明の一実施形態におけるナビゲーション装置1の経路探索の操作について説明する。
【0017】
図3(a)は、探索モード画面30を説明するための図である。運転者が経路探索を行うための出発地と目的地とを設定すると、探索条件を表示した探索モード画面30が表示モニタ16に表示される。探索モード画面30には、一般道路優先欄31、有料道路優先欄32、距離優先欄33および履歴案内欄34が表示される。運転者は、入力装置18を操作して、一般道路優先欄31、有料道路優先欄32、距離優先欄33および履歴案内欄34の中から所望の探索条件を選択することができる。これにより、運転者は、所望の探索条件で経路探索をナビゲーション装置1に実行させることができる。
【0018】
運転者が一般道路優先欄31を選択すると、ナビゲーション装置1は、有料道路を通過しないで目的地まで到達する経路を探索する。運転者が有料道路優先欄32を選択すると、ナビゲーション装置1は、適切に有料道路を通過して目的地まで到達できる場合、有料道路を使用して目的地まで到達する経路を探索する。運転者が距離優先欄33を選択すると、ナビゲーション装置1は、目的地まで最短距離で到達できる経路を探索する。運転者が履歴案内欄34を選択すると、ナビゲーション装置1は、運転者が過去に通過した経路の一部または全部を通過する経路を探索する。
【0019】
運転者が履歴案内欄34を選択すると、図3(b)に示すように、運転者が過去に通過した経路の中で、再び通過する経路を選択する通過経路選択画面40が表示される。通過経路選択画面40には、データ記憶部110に車両の走行履歴が記録された日付21、つまり運転者が経路を通過した日付41〜43が表示される。運転者が日付41〜43の中で所望の日付を選択すると、選択された日付の日に通過した経路の一部または全部を通過して目的地まで到達する経路が探索される。
【0020】
図4を参照して、運転者が過去に通過した経路の一部または全部を通過する経路について説明する。符号61は、運転者が過去に通過した経路を示す。符号62は経路61の始点を示し、符号63は終点を示す。符号64は運転者がナビゲーション装置1に設定した出発地、符号65は運転者がナビゲーション装置1に設定した目的地を示す。符号66は、出発地64の周辺における経路61上の所定位置を示し、符号67は、目的地65の周辺における経路61上の所定位置を示す。所定位置の具体的内容については後述する。
【0021】
ナビゲーション装置1が探索する出発地64から目的地65に至る経路は、経路68と、所定位置66および所定位置67の間の経路61と、経路69とを結合したものとなる。経路68は、出発地64と所定位置66との間の推奨経路である。経路69は、所定位置67と目的地65との間の推奨経路である。ナビゲーション装置1は、出発地64から目的地65に至る経路を探索した後、出発地から目的地の間の推奨経路と同様に、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別してその経路を画面表示する。また、ナビゲーション装置1は、この経路にしたがって車両が走行できるように、運転者に対して画面や音声などによる進行方向指示を行い、車両を経路案内する。
【0022】
次に、本発明の一実施形態における経路の探索処理について図5および図6のフローチャートを参照して説明する。図5および図6の処理は、探索モード画面30から履歴案内欄34が選択されるとスタートするプログラムであり、制御回路11により実行される。
【0023】
ステップS501では、ナビゲーション装置1に設定された出発地と目的地との間の距離を算出する。ステップS502では、判定円の半径を算出する。この判定円は、運転者が過去に通過した経路の中で、一部または全部を通過する経路を選択するために使用する。また、判定円は、上述の経路61上の所定位置66,67を算出するときにも使用する。判定円の半径は、出発地と目的地との間の距離の0.5%以上、1%以下の長さであることが好ましい。
【0024】
ステップS503では、ナビゲーション装置1に設定された出発地を中心とした判定円内に存在する履歴データ20における始点22を抽出する。ステップS504では、抽出した始点22に対応する終点23の中で、目的地を中心とした判定円内に存在する終点23を抽出する。ステップS505では、抽出した始点22および終点23に対応する日付21を抽出する。ステップS506では、表示モニタ16の表示画面に通過経路選択画面40を表示し、抽出した日付を通過経路選択画面40に表示する。ステップS507では、通過経路選択画面40から選択された日付に係る経路A(図4の経路61に相当)を抽出する。
【0025】
図6のステップS601では、図7に示すように、履歴データ20の始点71を中心とした判定円72と経路A73との交点A74(図4の点66に相当)を算出する。ステップS602では、図7に示すように、出発地75と交点A74との間の推奨経路A76(図4の経路68に相当)を探索する。ここで、符号77は、出発地75を中心とする判定円を示す。
【0026】
ステップS603では、図8に示すように、履歴データ20の終点81を中心とした判定円82と経路A83との交点B84(図4の点67に相当)を算出する。ステップS604では、図8に示すように、目的地85と交点B84との間の推奨経路B86(図4の経路69に相当)を探索する。ここで、符号87は、目的地75を中心とする判定円を示す。
【0027】
ステップS605では、推奨経路A76と、交点A74および交点B84の間の経路A73,83と、推奨経路B86とを連結し、経路Bを探索する。ステップS606では、表示モニタ16に経路Bを表示し、経路Bにしたがって車両が走行できるように、経路案内を行う。
【0028】
以上の実施形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)車両が走行した経路の履歴を履歴データ20として記憶し、履歴データ20における経路の一部または全部を通過する出発地から目的地までの経路を探索し、探索した経路にしたがって車両が走行するように経路案内を行うようにした。したがって、運転者は、知っている道路を通過して目的地まで到達できるので、目的地までの運転が容易になる。
【0029】
(2)履歴データ20の経路の中から、出発地から所定距離以内に始点が存在し、目的地から所定距離以内に終点が存在する経路を選択し、その経路の一部または全部を通過する経路を探索するようにした。これにより、履歴データ20の経路の中から、出発地と運転者の知っている経路との間があまり離れていない、および運転者の知っている経路と目的地との間があまり離れていない適切な経路を抽出することができる。さらに、そのような適切な経路を迅速に抽出することができる。
【0030】
(3)履歴データ20における経路の日付を表示モニタ16に表示し、表示された日付の中から運転者が選択した日付の経路の一部または全部を通過する経路を探索するようにした。これにより、運転者は、過去の記憶を手がかりにして運転者が運転しやすいと思う経路を複数の経路の中から選択することができる。
【0031】
(4)履歴データ20の経路の中から経路を抽出するときに使用する判定円の半径を出発地と目的地との間の距離に基づいて算出するようにした。これにより、履歴データ20の経路の中から、出発地から目的地に移動するときに通過するのに適切な経路を選択することができる。出発地と目的地との間の距離に比べて履歴データ20の中の経路が離れていると、運転者が運転しやすい経路を通過するというメリットより、目的地に到達する時間が長くなるというデメリットの方が大きくなるので、出発地と経路の始点との間の距離および目的地と経路の終点との間の距離は、出発地と目的地との間の距離の1%以下であることが好ましい。また、履歴データ20の中の始点および終点が、出発地および目的地と一致しない場合であっても運転者が知っている経路を通過して目的地に到達できるようにするため、出発地と経路の始点との間の距離および目的地と経路の終点との間の距離は、出発地と目的地との間の距離の0.5%以上であることが好ましい。
【0032】
(5)履歴データ20の始点71を中心にした判定円72と経路A73との交点A74を算出し、出発地75と交点A74との間の推奨経路A76を探索し、履歴データ20の終点81を中心にした判定円82と経路A83との交点B84を算出し、目的地85と交点B84との間の推奨経路B86を探索した。そして、推奨経路A76と、交点A74および交点B84の間の経路A73,83と、推奨経路B86とを連結し、出発地から目的地までの経路を探索するようにした。これにより、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できる。
【0033】
(6)交点A74および交点B84を算出するときに使用する判定円の半径を出発地と目的地との間の距離に基づいて算出するようにした。これにより、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できる交点A74および交点B84を算出することができる。出発地75から運転者の知っている経路73に速やかに移動でき、運転者の知っている経路83から目的地85に速やかに移動できることが好ましいので、判定円の半径は、出発地と目的地との間の距離の1%以下であることが好ましい。また、あまり遠回りにならずに出発地75から運転者の知っている経路73に移動でき、運転者の知っている経路83から目的地85に移動できるようにするため、判定円の半径は、出発地と目的地との間の距離の0.5%以上であることが好ましい。
【0034】
(7)経路探索を行うときの探索条件を表した探索モード画面30が表示モニタ16に表示され、探索モード画面30に表示された履歴案内欄34が運転者により選択されると、運転者が過去に通過した経路の一部または全部を通過する経路が探索されるようにした。これにより、運転者が遠回りしても知っている道路を通過したい場合に、運転者が過去に通過した経路の一部または全部を通過する経路が探索されるようにすることができる。
【0035】
以上の実施の形態のナビゲーション装置1を次のように変形することができる。
(1)履歴データ20の中から経路を抽出するための使用した、出発地を中心とした判定円の半径および目的地を中心とした判定円の半径、経路と判定円との間の交点を算出するために使用した、始点を中心とした判定円の半径および終点を中心とした判定円の半径は、すべて同じ距離であったが、適宜変更するようにしてもよい。
【0036】
(2)表示モニタ16に表示し、運転者が選択する情報は、運転者が過去に経路を走行したときの時間に関する情報であれば、日付に限定されない。たとえば、「先週の日曜日」など、走行した時間に関する情報として曜日を表示し、選択できるようにしてもよい。これにより、運転者は、過去の記憶を手がかりにして運転者が運転しやすいと思う経路を複数の経路の中から選択することができる。
【0037】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0038】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【0039】
特許請求の範囲の要素と実施の形態との対応関係を説明する。
本願発明の履歴記憶手段はデータ記憶部110に対応し、探索手段は制御回路11に対応する。経路案内手段は制御回路11、表示モニタ16およびスピーカ17に対応し、経路選択手段は制御回路11、表示モニタ16および入力装置18に対応する。距離算出手段、交点算出手段および半径算出手段は制御回路11に対応し、探索条件選択手段は制御回路11、表示モニタ16および入力装置18に対応する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素の対応関係になんら限定されるものではない。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施形態のナビゲーション装置の構成を示すブロック図である。
【図2】履歴データを説明するための図である。
【図3】本発明の一実施形態におけるナビゲーション装置1の経路探索の操作を説明するための図である。
【図4】運転者が過去に通過した経路の一部または全部を通過する経路を説明するための図である。
【図5】本発明の一実施形態における経路の探索処理を説明するためのフローチャートである。
【図6】本発明の一実施形態における経路の探索処理を説明するためのフローチャートである。
【図7】出発地と、運転者が過去に通過した経路との間の推奨経路の探索を説明するための図である。
【図8】運転者が過去に通過した経路と、目的地との間の推奨経路の探索を説明するための図である。
【符号の説明】
【0041】
1 ナビゲーション装置
11 制御回路
16 表示モニタ
17 スピーカ
18 入力装置
20 履歴データ
110 データ記憶部
【特許請求の範囲】
【請求項1】
車両が走行した経路の履歴を記憶する履歴記憶手段と、
出発地から目的地までの経路を探索する探索手段と、
前記探索手段によって探索した経路にしたがって前記車両が走行するように経路案内を行う経路案内手段とを備え、
前記探索手段は、前記履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記探索手段は、前記履歴記憶手段に記憶されている記憶経路の中で、前記出発地から第1の距離以内に記憶経路の始点が存在し、前記目的地から第2の距離以内に記憶経路の終点が存在する記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記履歴記憶手段は、前記車両が走行した経路とともに前記経路を走行したときの時間に関する情報を記憶し、
前記履歴記憶手段により記憶されている記憶経路の走行した時間に関する情報を表示モニタに表示し、前記履歴記憶手段により記憶されている記憶経路の中から、前記表示された走行した時間に関する情報の中から選択された走行した時間に関する情報に係る記憶経路を選択する経路選択手段を備え、
前記探索手段は、前記出発地から第1の距離以内に記憶経路の始点が存在し、前記目的地から第2の距離以内に記憶経路の終点が存在する記憶経路が複数ある場合、前記複数の記憶経路の中から前記経路選択手段により選択された記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項4】
請求項2または3に記載のナビゲーション装置において、
前記出発地と前記目的地との間の距離に基づいて、前記第1の距離および前記第2の距離を算出する距離算出手段を備えることを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記記憶経路の始点を中心とした第3の距離を半径とする円と前記記憶経路との間の第1の交点、および前記記憶経路の終点を中心とした第4の距離を半径とする円と前記記憶経路との間の第2の交点を算出する交点算出手段を備え、
前記探索手段は、前記出発地と前記第1の交点との間の第1の推奨経路、および前記第2の交点と前記目的地との間の第2の推奨経路を探索し、前記第1の推奨経路と、前記第1の交点および前記第2の交点の間の前記記憶経路と、前記第2の推奨経路とを結合することにより、前記出発地から前記目的地までの経路を探索することを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置において、
前記出発地と前記目的地との間の距離に基づいて、前記第3の距離および前記第4の距離を算出する半径算出手段を備えることを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
表示モニタに表示された探索条件より選択された探索条件を選択する探索条件選択手段を備え、
前記探索手段は、前記探索条件選択手段により所定の探索条件が選択された場合、前記履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項1】
車両が走行した経路の履歴を記憶する履歴記憶手段と、
出発地から目的地までの経路を探索する探索手段と、
前記探索手段によって探索した経路にしたがって前記車両が走行するように経路案内を行う経路案内手段とを備え、
前記探索手段は、前記履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記探索手段は、前記履歴記憶手段に記憶されている記憶経路の中で、前記出発地から第1の距離以内に記憶経路の始点が存在し、前記目的地から第2の距離以内に記憶経路の終点が存在する記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記履歴記憶手段は、前記車両が走行した経路とともに前記経路を走行したときの時間に関する情報を記憶し、
前記履歴記憶手段により記憶されている記憶経路の走行した時間に関する情報を表示モニタに表示し、前記履歴記憶手段により記憶されている記憶経路の中から、前記表示された走行した時間に関する情報の中から選択された走行した時間に関する情報に係る記憶経路を選択する経路選択手段を備え、
前記探索手段は、前記出発地から第1の距離以内に記憶経路の始点が存在し、前記目的地から第2の距離以内に記憶経路の終点が存在する記憶経路が複数ある場合、前記複数の記憶経路の中から前記経路選択手段により選択された記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【請求項4】
請求項2または3に記載のナビゲーション装置において、
前記出発地と前記目的地との間の距離に基づいて、前記第1の距離および前記第2の距離を算出する距離算出手段を備えることを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記記憶経路の始点を中心とした第3の距離を半径とする円と前記記憶経路との間の第1の交点、および前記記憶経路の終点を中心とした第4の距離を半径とする円と前記記憶経路との間の第2の交点を算出する交点算出手段を備え、
前記探索手段は、前記出発地と前記第1の交点との間の第1の推奨経路、および前記第2の交点と前記目的地との間の第2の推奨経路を探索し、前記第1の推奨経路と、前記第1の交点および前記第2の交点の間の前記記憶経路と、前記第2の推奨経路とを結合することにより、前記出発地から前記目的地までの経路を探索することを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置において、
前記出発地と前記目的地との間の距離に基づいて、前記第3の距離および前記第4の距離を算出する半径算出手段を備えることを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
表示モニタに表示された探索条件より選択された探索条件を選択する探索条件選択手段を備え、
前記探索手段は、前記探索条件選択手段により所定の探索条件が選択された場合、前記履歴記憶手段に記憶されている記憶経路の一部または全部を通過する経路を探索することを特徴とするナビゲーション装置。
【図1】



【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−250869(P2009−250869A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−101308(P2008−101308)
【出願日】平成20年4月9日(2008.4.9)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月9日(2008.4.9)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]