
ナビゲーション装置
【課題】自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、測位部21と、アンテナ位置メモリ22mと、アンテナ位置推定部22と、マッチング部23とを備える。測位部21は、GPS衛星からの無線信号に基づいて現在位置を測位する。アンテナ位置メモリ22mは、前回のアンテナ位置Cpを格納する。アンテナ位置推定部22は、現在のアンテナ位置Cc及び前回のアンテナ位置Cpに基づいて算出される走行軌跡情報と、ETCゲートの位置とに基づいて、アンテナ補正値Lcを算出する。マッチング部23は、アンテナ補正値Lcを用いて現在位置を補正し、所定の地図データと補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行する。
【解決手段】ナビゲーション装置は、測位部21と、アンテナ位置メモリ22mと、アンテナ位置推定部22と、マッチング部23とを備える。測位部21は、GPS衛星からの無線信号に基づいて現在位置を測位する。アンテナ位置メモリ22mは、前回のアンテナ位置Cpを格納する。アンテナ位置推定部22は、現在のアンテナ位置Cc及び前回のアンテナ位置Cpに基づいて算出される走行軌跡情報と、ETCゲートの位置とに基づいて、アンテナ補正値Lcを算出する。マッチング部23は、アンテナ補正値Lcを用いて現在位置を補正し、所定の地図データと補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はナビゲーション装置に関し、特に、GPS(Global Positioning System)等の衛星測位システムからの信号に基づいて位置を測定するナビゲーション装置に関する。
【背景技術】
【0002】
GPS受信機を搭載するナビゲーション装置は、高度約20,000kmを周回するGPS衛星からの信号を受信することによって地球上での絶対位置を特定する。GPSは、1990年代中頃から正式な運用が始まった、米国が管理する衛星測位システムである。GPS受信機の位置算出における誤差要因には、衛星から送信される情報に含まれる誤差、電離層及び対流圏の影響、GPS受信機の伝播距離の測定誤差等が上げられるが、運用当時は故意に精度を悪化させるSA(Selective Availability)の影響もあり、位置精度は100m程度であった。しかし、その後、米国により精度の改善が進められ、2000年にはSAが解除されたことによって、見晴らしの良い場所での位置精度は5〜10mまで向上している。また、DGPS(Differential GPS)やSBAS(Satellite-Based Augmentation System)等のGPSを補強する種々のシステムも実用段階に入っており、さらに、これまで民生用の信号として開放されていたL1帯に加えて、新たにL2及びL5帯の信号が民生用に開放される予定である。これらにより、GPS受信機の位置精度はさらに改善され、近い将来、車載システムにおいても1m以下の精度が実現される可能性がある。なお、精度が求められる測量の分野では、GPS衛星が用いる信号の搬送波を利用することによって、非常に高精度に位置を算出することもできる。(例えばL1帯においては1.57542GHzの周波数、即ち約19cmの波長を有する搬送波が用いられる。)
【0003】
しかし、GPS受信機の測位原理からも分かるように、測位される位置は、GPS衛星からの信号を受信するアンテナの位置であり、車両のどこにアンテナが設置されているかを特定しなければ、高精度な現在位置を活用することができない。つまり、車両におけるアンテナ設置位置を正確に求め、それを用いて測位された位置を補正することが好ましい。そのため、操作部を用いてユーザが手動でアンテナ設置位置を設定する従来例のナビゲーション装置が、例えば特許文献1に開示されている。
【0004】
【特許文献1】特開2001−235336号公報(第5−7頁、第1図)。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来例のナビゲーション装置では、手動でアンテナ設置位置を入力するという手間をユーザに負担させるものであり、また、手動で入力された設定値は必ずしも正しいとは限らず、誤って設定された場合には位置算出精度が悪化する可能性があるという問題点があった。
【0006】
本発明の目的は以上の問題点を解決し、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0007】
第1の発明に係るナビゲーション装置は、所定の測位システムの各送信局からの無線信号に基づいて現在位置を測位する測位部と、前記測位部により前回測位された現在位置を前回測位位置として格納する記憶部と、前記現在位置及び前記前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部と、前記アンテナ補正値を用いて現在位置を補正し、所定の地図データと前記補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行するマッチング部とを備えたことを特徴とする。
【0008】
上記ナビゲーション装置において、前記特定施設は、ETCゲート又は駐車場ゲートであることを特徴とする。
【0009】
また、上記ナビゲーション装置において、前記特定施設から当該特定施設の位置情報を取得する受信部をさらに備え、前記アンテナ位置算出部は、前記受信部により取得された前記特定施設の位置情報を用いてアンテナ補正値を算出することを特徴とする。
【発明の効果】
【0010】
本発明に係るナビゲーション装置によれば、現在位置及び前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明に係る一実施形態について図面を参照して説明する。なお、以下の各実施形態において、同様の構成要素については同一の符号を付している。
【0012】
実施形態.
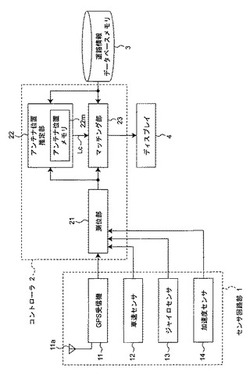
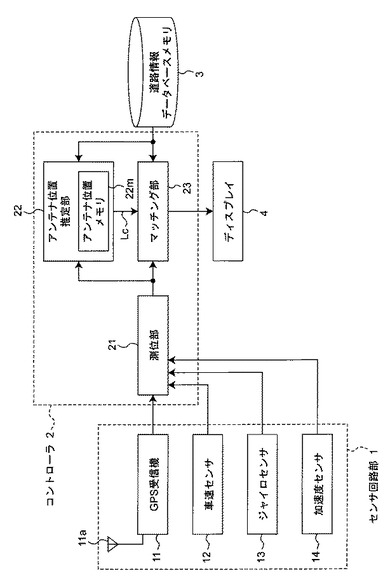
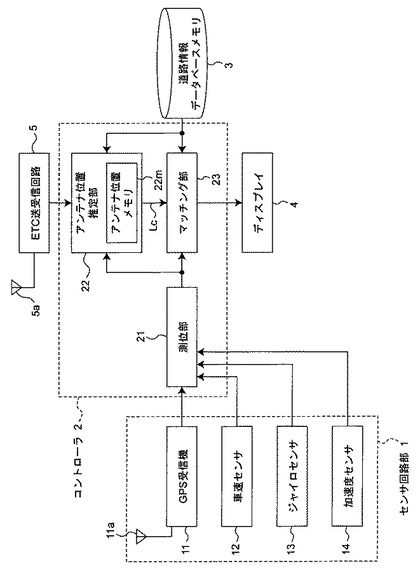
図1は、本発明の一実施形態に係るナビゲーション装置の構成を示すブロック図である。図1において、ナビゲーション装置は、センサ回路部1と、コントローラ2と、道路情報データベースメモリ3と、ディスプレイ4とを備えて構成される。センサ回路部1は、GPS受信機11と、GPSアンテナ11aと、車速センサ12と、ジャイロセンサ13と、加速度センサ14とを備えて構成される。また、コントローラ2は、測位部21と、アンテナ位置推定部22と、マッチング部23とを備えて構成され、アンテナ位置推定部22は、アンテナ位置メモリ22mを備える。
【0013】
センサ回路部1において、GPS受信機11は、GPSアンテナ11aを介して、GPS衛星から送信される無線信号を受信する。車速センサ12は、ナビゲーション装置が搭載される車両のタイヤの回転を検出することによって車速パルスを生成して出力する。生成された車速パルスの単位時間当たりのパルス数をコントローラ2により計測することで、車両の移動速度を求めることができる。ジャイロセンサ13は、車両の旋回時における角速度を検出する。検出された角速度をコントローラ2により積分することで相対的な旋回角度を求めることができる。ジャイロセンサ13としては、様々なセンサが存在するが、ナビゲーション装置用としては、振動子を用いてコリオリの力を検出するジャイロセンサが一般的に使用されている。加速度センサ14は、車両の加速度を検出する。検出された加速度をコントローラ2により例えば重力加速度と比較することで、車両の傾斜角を求めることができる。道路情報データベースメモリ3は、例えばDVDやハードディスク等の記憶媒体であって、地図データ、道路網を示すデータ(ノード、リンク)、施設情報等を含む道路情報を格納する。
【0014】
ここで、まず、GPS受信機11の測位原理について説明する。GPS衛星は、高度約20,000kmの軌道上に約24衛星存在し、24時間地球上のどこからでもGPS衛星からの信号を受信することができる。GPS衛星からの信号には、GPS衛星自身の詳細な位置を算出するための軌道情報と、全てのGPS衛星で同期した時刻情報とが含まれる。GPS受信機11は、受信信号に含まれる正確な信号の送信時刻情報とGPS受信機11での信号の受信時刻との差を求めることで、GPS衛星からGPS受信機11までの信号の伝播時間を算出し、伝播時間に光速を乗じることで信号の伝播距離を算出する。また、GPS衛星から送られる軌道情報を元に、信号が送信された時刻情報を用いてGPS衛星の正確な位置を算出する。
【0015】
このようにして算出されたGPS衛星の位置と信号の伝播距離とから、GPS衛星の位置を中心とし、伝播距離を半径とする球の表面上にGPS受信機11が存在すると仮定する。この仮定に基づいて、GPS受信機11の位置を未知数として球の方程式を立てる。ここで、GPS受信機11の位置は、緯度、経度及び高度の3次元で表すことができ、未知数が3つとなるので、少なくとも3つのGPS衛星から同時に信号を受信することが必要である。しかしながら、実際には伝播距離を求める際に使用するGPS受信機11内の時計の誤差が1つの未知数となるため、少なくとも4つのGPS衛星から同時に信号を受信することが要求される。従って、上記球の方程式を少なくとも4つのGPS衛星について求め、それらの連立方程式を解くことで、GPS受信機11の位置を求めることができる。
【0016】
GPS受信機11は、GPS衛星からの信号の伝播距離を測定するという測位原理から、信号の受信環境に大きな影響を受ける。例えば、トンネル等ではGPS衛星からの信号を受信できないため位置を算出できない。また、ビル街等では建物に信号が反射するため伝播距離を正確に測定できず、位置算出精度が著しく悪化することがある。このため、ナビゲーション装置では、車速センサ12、ジャイロセンサ13及び加速度センサ14を用いることで、測位部21において車両の速度ベクトルを算出して積分することで、相対的な位置の変化を算出する。このとき、相対的な位置の変化から絶対位置を算出するためには、初期位置及び初期方位が必要となるが、一般的には、GPS受信機11により算出される位置及び方位が用いられる。車速センサ12、ジャイロセンサ13及び加速度センサ14は周囲の環境の影響を受けにくいので、短期的には高精度で位置を算出することができる。しかしながら、相対的な速度ベクトルを積分する際、各センサの出力に含まれる誤差も積分されてしまうので、時間経過とともに誤差が蓄積して大きくなるという問題がある。従って、測位部21は、GPS受信機11により算出された絶対位置と、車速センサ12、ジャイロセンサ13及び加速度センサ14の出力から算出される相対的な位置の変化との両方を用いて、各位置情報の特徴を考慮して、最終的に現在位置を決定して、アンテナ位置推定部22及びマッチング部23に出力する。
【0017】
アンテナ位置推定部22は、所定時間毎に、測位部21により測定された現在位置である現在のアンテナ位置と、アンテナ位置メモリ22mに格納された前回のアンテナ位置と、道路情報データベースメモリ3内に格納された道路情報とに基づいて、GPSアンテナ11aのアンテナ設置位置を推定することによってアンテナ補正値Lcを算出してマッチング部23に出力する(詳細は図4及び図5を参照して後述する。)。マッチング部23は、測位部21により測定された現在位置と、道路情報データベースメモリ3内に格納された道路情報と、アンテナ位置推定部22により算出されたアンテナ補正値Lcとを用いて、総合的に地図データ上での自車位置を決定して、地図データとともに自車位置をディスプレイ4に表示する。ディスプレイ6は、例えば液晶ディスプレイ等である。
【0018】
ところで、将来的に、道路情報に道路車線毎のデータが格納されることが期待される。このように状況になると、新たなアプリケーションとして、現在の車両の走行車線を特定し、利用者にレーンチェンジを促す等、いわゆるレーン案内と呼ばれる機能が追加されることが想定される。このようなアプリケーションを実現するためには、正確に現在の走行車線を特定することが非常に重要となる。
【0019】
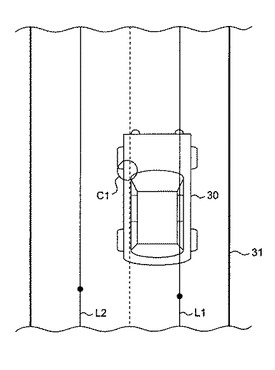
図2は、図1のナビゲーション装置を搭載した車両30が道路21を走行中である場合のアンテナ位置C1を示す平面図である。図2において、車両30は、道路リンクL1上を道路リンク2に近い場所を走行している。例えば、GPSアンテナ11aが車両30において前方左側に設置されている場合、測位部21によって測位される現在位置であるアンテナ位置は図中C1で示す位置となる。この場合、アンテナ位置C1から道路リンクL1及びL2までの距離はほぼ同じであるため、車両30がどちらの道路リンクを走行しているのかは正確に判断できない。
【0020】
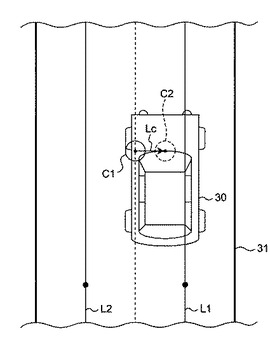
図3は、図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合のアンテナ位置C1とアンテナ位置C1からアンテナ補正値Lcだけ補正された位置C2とを示す平面図である。図3において、測位部21によって測位されるアンテナ位置C1は、アンテナ位置推定部22により算出されるアンテナ補正値Lcを用いて、マッチング部23により車両の中心位置の近傍に補正される。補正後の位置C2から道路リンクL1までの距離は、補正後の位置C2から道路リンクL2までの距離よりも短いので、車両30が道路リンクL1を走行していると判断することができる。
【0021】
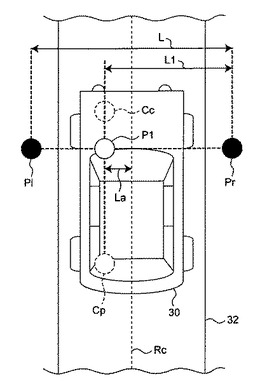
図4は、図1のナビゲーション装置を搭載した車両30がETC(Electronic Toll Collection)ゲートを通過したときのアンテナ補正値Lcの算出方法を説明する平面図である。一般的に、車両30は車線の中心を走行していると考えられるが、必ずしも正確に中心を走行しているとは限らない。しかし、道路に対して左右対称の設備が設置されている例えばETCゲート等の特定施設を通過するときは、ほぼ車線の中心を走行するものと考えられる。道路情報データベースメモリ3は、このようなゲート右位置Pr及びゲート左位置Plを含むETCゲート位置を既知の座標情報として予め格納している。アンテナ位置推定部22は、測位部21により算出された現在位置である現在のアンテナ位置Ccと、アンテナ位置メモリ22mに格納された前回のアンテナ位置Cpとから走行軌跡を求め、走行軌跡情報とETCゲート位置とを比較することによって、車両30がETCゲートを通過したか否かを判断する。車両30がETCゲートを通過したと判断されるときは、走行軌跡情報とETCゲートの位置とに基づいて、ゲート通過位置P1を算出する。
【0022】
ETCゲート通過時、車両30の中心と道路32の中心Rcとがほぼ一致すると考えることができるので、ゲート通過位置P1とゲート右位置Pr及びゲート左位置Plとから、GPSアンテナ11aの設置位置と車両30の中心との相対的な距離であるアンテナ推定距離Laを算出することができる。具体的には、ETCゲートが道路に対して左右対称に設置されているので、まず、ゲート通過位置P1からゲート右位置Prまでの距離L1を算出し、ゲート間距離Lと距離L1とを用いて、次式(1)によりアンテナ推定距離Laを算出する。ここで、距離L1はゲート通過位置P1からゲート左位置Plまでの距離であってもよい。
【0023】
[数1]
La=L1−(L/2) (1)
【0024】
さらに、アンテナ位置推定部22は、車両30が正確にETCゲートの中心を走行していない場合や、測位部21の測位誤差の影響を考慮するために、例えば過去所定回数のアンテナ推定距離Laの算出結果の平均値を求めることによってアンテナ補正値Lcとし、アンテナ推定距離Laを用いてアンテナ補正値Lcを学習させる。
【0025】
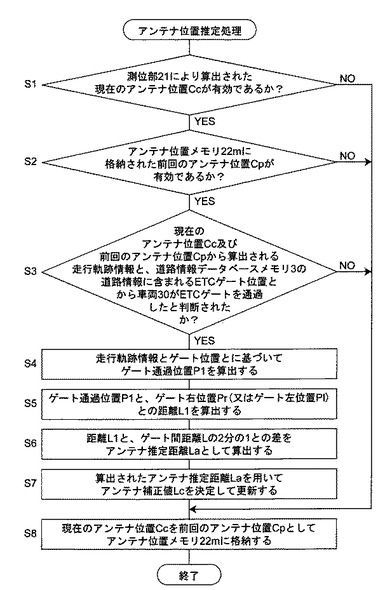
図5は、アンテナ位置推定部22により実行されるアンテナ位置推定処理を示すフローチャートである。図5のステップS1において、まず、測位部21により算出された現在のアンテナ位置Ccが有効であるか否かを判断し、YESのときはステップS2に進む一方、NOのときはステップS8に進む。現在のアンテナ位置Ccが有効であるか否かは、例えばGPS受信機11において信号を正常に受信しているGPS衛星の配置及び数、GPS受信機11が信号を受信できなくなってからの経過時間等から総合的に判断される。現在のアンテナ位置Ccが有効でない場合は、測位結果の誤差が大きいので、アンテナ補正値Lcの算出を行わない。ステップS2において、アンテナ位置メモリ22mに格納された前回のアンテナ位置Cpが有効であるか否かを判断し、YESのときはステップS3に進む一方、NOのときはステップS8に進む。前回のアンテナ位置Cpが有効であるか否かは、アンテナ位置メモリ22mに格納された、前回のアンテナ位置Cpが有効であるか否かを示す情報により判断される。ステップS3において、現在のアンテナ位置Cc及び前回のアンテナ位置Cpから算出される走行軌跡情報と、道路情報データベースメモリ3の道路情報に含まれるETCゲート位置とから車両30がETCゲートを通過したと判断されるか否かを判断し、YESのときはステップS4に進む一方、NOのときはステップS8に進む。具体的には、前回のアンテナ位置Cp及び今回のアンテナ位置Ccの2点を結んだ直線と、ゲート右位置Pr及びゲート左位置Plを結んだ直線とが交差するか否かによって車両30がETCゲートを通過したかどうか判断する。
【0026】
ステップS4において、走行軌跡情報とゲート位置とに基づいてゲート通過位置P1を算出した後、ステップS5に進む。具体的には、ゲート通過位置P1は、前回のアンテナ位置Cp及び今回のアンテナ位置Ccの2点を結んだ直線と、ゲート右位置Pr及びゲート左位置Plを結んだ直線とが交差する点の位置を求めることによって算出される。ステップS5において、ステップS4で算出されたゲート通過位置P1とゲート右位置Pr(又はゲート左位置Pl)との距離L1を算出した後、ステップS6に進む。ステップS6において、上記式(1)に基づいて、距離L1とゲート間距離Lの2分の1との差をアンテナ推定距離Laとして算出し、ステップS7において、算出されたアンテナ推定距離Laを用いてアンテナ補正値Lcを決定して更新した後、ステップS8に進む。具体的には、例えばアンテナ推定距離Laの過去所定回数の算出結果の平均値をアンテナ補正値Lcとする。ステップS8において、現在のアンテナ位置Ccと、現在のアンテナ位置Ccが有効であるか否かを示す情報とを、それぞれ前回のアンテナ位置Cp及び前回のアンテナ位置Cpが有効であるか否かを示す情報としてアンテナ位置メモリ22mに格納する。
【0027】
以上説明したように、本発明の一実施形態に係るナビゲーション装置によれば、現在のアンテナ位置Cc及び前回のアンテナ位置Cpに基づいて算出される走行軌跡情報と、予め位置の決まったETCゲートの位置とに基づいて、アンテナ補正値Lcを算出するアンテナ位置推定部22を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく車両の位置を測定することができる。
【0028】
なお、本実施形態において、道路情報データベースメモリ3にゲート右位置Pr及びゲート左位置Plを含むETCゲート位置が予め格納されていた。しかし、本発明はこの構成に限らず、ETCゲートを通過する際に路側機(ゲート)からETCゲート位置の情報を取得してもよい。図6は、本発明の一実施形態の変形例に係るナビゲーション装置の構成を示すブロック図である。図6において、本変形例に係るナビゲーション装置は、図1に示した一実施形態に係るナビゲーション装置と比較して、アンテナ位置推定部22はETCアンテナ5aを備えたETC送受信回路5に接続された点が異なる。一般に、ETCは、車載機、ETCカード及び路側機で構成され、車載機を車両に設置する際には、車両の大きさやナンバープレートなどの車両を特定する情報を車載機に入力するセットアップ処理が行われる。図6において、車両がETCゲートを通過するとき、車載機はセットアップ処理により入力された車両の情報とETCカードの情報とをETC送受信回路5により路側機に送信し、路側機は入口又は出口の情報、料金の情報等を車載機に送信し、車載機は路側機からの情報をETC送受信回路5により受信し、これらの一連の通信によって料金を決裁する。従って、このとき、路側機は、料金決裁情報等の一部としてゲート右位置Prおよびゲート左位置Plを追加して車載機に送信してもよい。ゲート位置の情報としては、30〜40byte程度のデータサイズで表現できる内容であり、ETCで使用される通信速度1024kbpsでは大きな負荷とはならない。また、車載機は、料金決裁情報の受信のタイミングでETCゲートを通過したと判断してもよい。この構成により、道路情報データベースメモリ3が予めETCゲートの位置を格納していなくても、アンテナ位置推定部22はETCゲートの位置を取得することができる。
【0029】
また、アンテナ位置推定部22はETCゲートを通過するときにアンテナ補正値Lcを算出したが、本発明はこれに限らず、ETCゲートに代えて駐車場のゲート等、他の特定施設を通過するときにアンテナ補正値Lcを算出してもよい。
【0030】
さらに、アンテナ補正値Lcを、過去所定回数のアンテナ推定距離Laの算出結果の平均値を求めることによって算出した。しかし、本発明はこれに限らず、例えば過去所定回数のアンテナ推定距離Laの算出結果のうち最も多い値をアンテナ補正値Lcとする等、他の方法を用いて算出してもよい。
【0031】
またさらに、アンテナ位置メモリ22mをアンテナ位置推定部22の内部に設けたが、本発明はこれに限らず、アンテナ位置推定部22の内部に代えてコントローラ2の内部又は外部に設けてもよい。
【産業上の利用可能性】
【0032】
本発明に係るナビゲーション装置によれば、現在位置及び前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できる。
【0033】
本発明に係るナビゲーション装置は、例えばGPS衛星からの信号に基づいて車両の位置を測定する車載用ナビゲーション装置として利用することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合の測位位置C1を示す平面図である。
【図3】図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合の測位位置C1と補正後の位置C2とを示す平面図である。
【図4】図1のナビゲーション装置を搭載した車両30がETCゲートを通過したときのアンテナ補正値Lcの算出方法を説明する平面図である。
【図5】図1のアンテナ位置推定部22により実行されるアンテナ位置推定処理を示すフローチャートである。
【図6】本発明の一実施形態の変形例に係るナビゲーション装置の構成を示すブロック図である。
【符号の説明】
【0035】
1…センサ回路部、
2…コントローラ、
3…道路情報データベースメモリ、
4…ディスプレイ、
5…ETC送受信回路、
5a…ETCアンテナ、
11…GPS受信機、
11a…GPSアンテナ、
12…車速センサ、
13…ジャイロセンサ、
14…加速度センサ、
21…測位部、
22…アンテナ位置推定部、
22m…アンテナ位置メモリ、
23…マッチング部、
30…車両、
31…道路、
32…ゲート道路。
【技術分野】
【0001】
本発明はナビゲーション装置に関し、特に、GPS(Global Positioning System)等の衛星測位システムからの信号に基づいて位置を測定するナビゲーション装置に関する。
【背景技術】
【0002】
GPS受信機を搭載するナビゲーション装置は、高度約20,000kmを周回するGPS衛星からの信号を受信することによって地球上での絶対位置を特定する。GPSは、1990年代中頃から正式な運用が始まった、米国が管理する衛星測位システムである。GPS受信機の位置算出における誤差要因には、衛星から送信される情報に含まれる誤差、電離層及び対流圏の影響、GPS受信機の伝播距離の測定誤差等が上げられるが、運用当時は故意に精度を悪化させるSA(Selective Availability)の影響もあり、位置精度は100m程度であった。しかし、その後、米国により精度の改善が進められ、2000年にはSAが解除されたことによって、見晴らしの良い場所での位置精度は5〜10mまで向上している。また、DGPS(Differential GPS)やSBAS(Satellite-Based Augmentation System)等のGPSを補強する種々のシステムも実用段階に入っており、さらに、これまで民生用の信号として開放されていたL1帯に加えて、新たにL2及びL5帯の信号が民生用に開放される予定である。これらにより、GPS受信機の位置精度はさらに改善され、近い将来、車載システムにおいても1m以下の精度が実現される可能性がある。なお、精度が求められる測量の分野では、GPS衛星が用いる信号の搬送波を利用することによって、非常に高精度に位置を算出することもできる。(例えばL1帯においては1.57542GHzの周波数、即ち約19cmの波長を有する搬送波が用いられる。)
【0003】
しかし、GPS受信機の測位原理からも分かるように、測位される位置は、GPS衛星からの信号を受信するアンテナの位置であり、車両のどこにアンテナが設置されているかを特定しなければ、高精度な現在位置を活用することができない。つまり、車両におけるアンテナ設置位置を正確に求め、それを用いて測位された位置を補正することが好ましい。そのため、操作部を用いてユーザが手動でアンテナ設置位置を設定する従来例のナビゲーション装置が、例えば特許文献1に開示されている。
【0004】
【特許文献1】特開2001−235336号公報(第5−7頁、第1図)。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来例のナビゲーション装置では、手動でアンテナ設置位置を入力するという手間をユーザに負担させるものであり、また、手動で入力された設定値は必ずしも正しいとは限らず、誤って設定された場合には位置算出精度が悪化する可能性があるという問題点があった。
【0006】
本発明の目的は以上の問題点を解決し、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0007】
第1の発明に係るナビゲーション装置は、所定の測位システムの各送信局からの無線信号に基づいて現在位置を測位する測位部と、前記測位部により前回測位された現在位置を前回測位位置として格納する記憶部と、前記現在位置及び前記前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部と、前記アンテナ補正値を用いて現在位置を補正し、所定の地図データと前記補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行するマッチング部とを備えたことを特徴とする。
【0008】
上記ナビゲーション装置において、前記特定施設は、ETCゲート又は駐車場ゲートであることを特徴とする。
【0009】
また、上記ナビゲーション装置において、前記特定施設から当該特定施設の位置情報を取得する受信部をさらに備え、前記アンテナ位置算出部は、前記受信部により取得された前記特定施設の位置情報を用いてアンテナ補正値を算出することを特徴とする。
【発明の効果】
【0010】
本発明に係るナビゲーション装置によれば、現在位置及び前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明に係る一実施形態について図面を参照して説明する。なお、以下の各実施形態において、同様の構成要素については同一の符号を付している。
【0012】
実施形態.
図1は、本発明の一実施形態に係るナビゲーション装置の構成を示すブロック図である。図1において、ナビゲーション装置は、センサ回路部1と、コントローラ2と、道路情報データベースメモリ3と、ディスプレイ4とを備えて構成される。センサ回路部1は、GPS受信機11と、GPSアンテナ11aと、車速センサ12と、ジャイロセンサ13と、加速度センサ14とを備えて構成される。また、コントローラ2は、測位部21と、アンテナ位置推定部22と、マッチング部23とを備えて構成され、アンテナ位置推定部22は、アンテナ位置メモリ22mを備える。
【0013】
センサ回路部1において、GPS受信機11は、GPSアンテナ11aを介して、GPS衛星から送信される無線信号を受信する。車速センサ12は、ナビゲーション装置が搭載される車両のタイヤの回転を検出することによって車速パルスを生成して出力する。生成された車速パルスの単位時間当たりのパルス数をコントローラ2により計測することで、車両の移動速度を求めることができる。ジャイロセンサ13は、車両の旋回時における角速度を検出する。検出された角速度をコントローラ2により積分することで相対的な旋回角度を求めることができる。ジャイロセンサ13としては、様々なセンサが存在するが、ナビゲーション装置用としては、振動子を用いてコリオリの力を検出するジャイロセンサが一般的に使用されている。加速度センサ14は、車両の加速度を検出する。検出された加速度をコントローラ2により例えば重力加速度と比較することで、車両の傾斜角を求めることができる。道路情報データベースメモリ3は、例えばDVDやハードディスク等の記憶媒体であって、地図データ、道路網を示すデータ(ノード、リンク)、施設情報等を含む道路情報を格納する。
【0014】
ここで、まず、GPS受信機11の測位原理について説明する。GPS衛星は、高度約20,000kmの軌道上に約24衛星存在し、24時間地球上のどこからでもGPS衛星からの信号を受信することができる。GPS衛星からの信号には、GPS衛星自身の詳細な位置を算出するための軌道情報と、全てのGPS衛星で同期した時刻情報とが含まれる。GPS受信機11は、受信信号に含まれる正確な信号の送信時刻情報とGPS受信機11での信号の受信時刻との差を求めることで、GPS衛星からGPS受信機11までの信号の伝播時間を算出し、伝播時間に光速を乗じることで信号の伝播距離を算出する。また、GPS衛星から送られる軌道情報を元に、信号が送信された時刻情報を用いてGPS衛星の正確な位置を算出する。
【0015】
このようにして算出されたGPS衛星の位置と信号の伝播距離とから、GPS衛星の位置を中心とし、伝播距離を半径とする球の表面上にGPS受信機11が存在すると仮定する。この仮定に基づいて、GPS受信機11の位置を未知数として球の方程式を立てる。ここで、GPS受信機11の位置は、緯度、経度及び高度の3次元で表すことができ、未知数が3つとなるので、少なくとも3つのGPS衛星から同時に信号を受信することが必要である。しかしながら、実際には伝播距離を求める際に使用するGPS受信機11内の時計の誤差が1つの未知数となるため、少なくとも4つのGPS衛星から同時に信号を受信することが要求される。従って、上記球の方程式を少なくとも4つのGPS衛星について求め、それらの連立方程式を解くことで、GPS受信機11の位置を求めることができる。
【0016】
GPS受信機11は、GPS衛星からの信号の伝播距離を測定するという測位原理から、信号の受信環境に大きな影響を受ける。例えば、トンネル等ではGPS衛星からの信号を受信できないため位置を算出できない。また、ビル街等では建物に信号が反射するため伝播距離を正確に測定できず、位置算出精度が著しく悪化することがある。このため、ナビゲーション装置では、車速センサ12、ジャイロセンサ13及び加速度センサ14を用いることで、測位部21において車両の速度ベクトルを算出して積分することで、相対的な位置の変化を算出する。このとき、相対的な位置の変化から絶対位置を算出するためには、初期位置及び初期方位が必要となるが、一般的には、GPS受信機11により算出される位置及び方位が用いられる。車速センサ12、ジャイロセンサ13及び加速度センサ14は周囲の環境の影響を受けにくいので、短期的には高精度で位置を算出することができる。しかしながら、相対的な速度ベクトルを積分する際、各センサの出力に含まれる誤差も積分されてしまうので、時間経過とともに誤差が蓄積して大きくなるという問題がある。従って、測位部21は、GPS受信機11により算出された絶対位置と、車速センサ12、ジャイロセンサ13及び加速度センサ14の出力から算出される相対的な位置の変化との両方を用いて、各位置情報の特徴を考慮して、最終的に現在位置を決定して、アンテナ位置推定部22及びマッチング部23に出力する。
【0017】
アンテナ位置推定部22は、所定時間毎に、測位部21により測定された現在位置である現在のアンテナ位置と、アンテナ位置メモリ22mに格納された前回のアンテナ位置と、道路情報データベースメモリ3内に格納された道路情報とに基づいて、GPSアンテナ11aのアンテナ設置位置を推定することによってアンテナ補正値Lcを算出してマッチング部23に出力する(詳細は図4及び図5を参照して後述する。)。マッチング部23は、測位部21により測定された現在位置と、道路情報データベースメモリ3内に格納された道路情報と、アンテナ位置推定部22により算出されたアンテナ補正値Lcとを用いて、総合的に地図データ上での自車位置を決定して、地図データとともに自車位置をディスプレイ4に表示する。ディスプレイ6は、例えば液晶ディスプレイ等である。
【0018】
ところで、将来的に、道路情報に道路車線毎のデータが格納されることが期待される。このように状況になると、新たなアプリケーションとして、現在の車両の走行車線を特定し、利用者にレーンチェンジを促す等、いわゆるレーン案内と呼ばれる機能が追加されることが想定される。このようなアプリケーションを実現するためには、正確に現在の走行車線を特定することが非常に重要となる。
【0019】
図2は、図1のナビゲーション装置を搭載した車両30が道路21を走行中である場合のアンテナ位置C1を示す平面図である。図2において、車両30は、道路リンクL1上を道路リンク2に近い場所を走行している。例えば、GPSアンテナ11aが車両30において前方左側に設置されている場合、測位部21によって測位される現在位置であるアンテナ位置は図中C1で示す位置となる。この場合、アンテナ位置C1から道路リンクL1及びL2までの距離はほぼ同じであるため、車両30がどちらの道路リンクを走行しているのかは正確に判断できない。
【0020】
図3は、図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合のアンテナ位置C1とアンテナ位置C1からアンテナ補正値Lcだけ補正された位置C2とを示す平面図である。図3において、測位部21によって測位されるアンテナ位置C1は、アンテナ位置推定部22により算出されるアンテナ補正値Lcを用いて、マッチング部23により車両の中心位置の近傍に補正される。補正後の位置C2から道路リンクL1までの距離は、補正後の位置C2から道路リンクL2までの距離よりも短いので、車両30が道路リンクL1を走行していると判断することができる。
【0021】
図4は、図1のナビゲーション装置を搭載した車両30がETC(Electronic Toll Collection)ゲートを通過したときのアンテナ補正値Lcの算出方法を説明する平面図である。一般的に、車両30は車線の中心を走行していると考えられるが、必ずしも正確に中心を走行しているとは限らない。しかし、道路に対して左右対称の設備が設置されている例えばETCゲート等の特定施設を通過するときは、ほぼ車線の中心を走行するものと考えられる。道路情報データベースメモリ3は、このようなゲート右位置Pr及びゲート左位置Plを含むETCゲート位置を既知の座標情報として予め格納している。アンテナ位置推定部22は、測位部21により算出された現在位置である現在のアンテナ位置Ccと、アンテナ位置メモリ22mに格納された前回のアンテナ位置Cpとから走行軌跡を求め、走行軌跡情報とETCゲート位置とを比較することによって、車両30がETCゲートを通過したか否かを判断する。車両30がETCゲートを通過したと判断されるときは、走行軌跡情報とETCゲートの位置とに基づいて、ゲート通過位置P1を算出する。
【0022】
ETCゲート通過時、車両30の中心と道路32の中心Rcとがほぼ一致すると考えることができるので、ゲート通過位置P1とゲート右位置Pr及びゲート左位置Plとから、GPSアンテナ11aの設置位置と車両30の中心との相対的な距離であるアンテナ推定距離Laを算出することができる。具体的には、ETCゲートが道路に対して左右対称に設置されているので、まず、ゲート通過位置P1からゲート右位置Prまでの距離L1を算出し、ゲート間距離Lと距離L1とを用いて、次式(1)によりアンテナ推定距離Laを算出する。ここで、距離L1はゲート通過位置P1からゲート左位置Plまでの距離であってもよい。
【0023】
[数1]
La=L1−(L/2) (1)
【0024】
さらに、アンテナ位置推定部22は、車両30が正確にETCゲートの中心を走行していない場合や、測位部21の測位誤差の影響を考慮するために、例えば過去所定回数のアンテナ推定距離Laの算出結果の平均値を求めることによってアンテナ補正値Lcとし、アンテナ推定距離Laを用いてアンテナ補正値Lcを学習させる。
【0025】
図5は、アンテナ位置推定部22により実行されるアンテナ位置推定処理を示すフローチャートである。図5のステップS1において、まず、測位部21により算出された現在のアンテナ位置Ccが有効であるか否かを判断し、YESのときはステップS2に進む一方、NOのときはステップS8に進む。現在のアンテナ位置Ccが有効であるか否かは、例えばGPS受信機11において信号を正常に受信しているGPS衛星の配置及び数、GPS受信機11が信号を受信できなくなってからの経過時間等から総合的に判断される。現在のアンテナ位置Ccが有効でない場合は、測位結果の誤差が大きいので、アンテナ補正値Lcの算出を行わない。ステップS2において、アンテナ位置メモリ22mに格納された前回のアンテナ位置Cpが有効であるか否かを判断し、YESのときはステップS3に進む一方、NOのときはステップS8に進む。前回のアンテナ位置Cpが有効であるか否かは、アンテナ位置メモリ22mに格納された、前回のアンテナ位置Cpが有効であるか否かを示す情報により判断される。ステップS3において、現在のアンテナ位置Cc及び前回のアンテナ位置Cpから算出される走行軌跡情報と、道路情報データベースメモリ3の道路情報に含まれるETCゲート位置とから車両30がETCゲートを通過したと判断されるか否かを判断し、YESのときはステップS4に進む一方、NOのときはステップS8に進む。具体的には、前回のアンテナ位置Cp及び今回のアンテナ位置Ccの2点を結んだ直線と、ゲート右位置Pr及びゲート左位置Plを結んだ直線とが交差するか否かによって車両30がETCゲートを通過したかどうか判断する。
【0026】
ステップS4において、走行軌跡情報とゲート位置とに基づいてゲート通過位置P1を算出した後、ステップS5に進む。具体的には、ゲート通過位置P1は、前回のアンテナ位置Cp及び今回のアンテナ位置Ccの2点を結んだ直線と、ゲート右位置Pr及びゲート左位置Plを結んだ直線とが交差する点の位置を求めることによって算出される。ステップS5において、ステップS4で算出されたゲート通過位置P1とゲート右位置Pr(又はゲート左位置Pl)との距離L1を算出した後、ステップS6に進む。ステップS6において、上記式(1)に基づいて、距離L1とゲート間距離Lの2分の1との差をアンテナ推定距離Laとして算出し、ステップS7において、算出されたアンテナ推定距離Laを用いてアンテナ補正値Lcを決定して更新した後、ステップS8に進む。具体的には、例えばアンテナ推定距離Laの過去所定回数の算出結果の平均値をアンテナ補正値Lcとする。ステップS8において、現在のアンテナ位置Ccと、現在のアンテナ位置Ccが有効であるか否かを示す情報とを、それぞれ前回のアンテナ位置Cp及び前回のアンテナ位置Cpが有効であるか否かを示す情報としてアンテナ位置メモリ22mに格納する。
【0027】
以上説明したように、本発明の一実施形態に係るナビゲーション装置によれば、現在のアンテナ位置Cc及び前回のアンテナ位置Cpに基づいて算出される走行軌跡情報と、予め位置の決まったETCゲートの位置とに基づいて、アンテナ補正値Lcを算出するアンテナ位置推定部22を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく車両の位置を測定することができる。
【0028】
なお、本実施形態において、道路情報データベースメモリ3にゲート右位置Pr及びゲート左位置Plを含むETCゲート位置が予め格納されていた。しかし、本発明はこの構成に限らず、ETCゲートを通過する際に路側機(ゲート)からETCゲート位置の情報を取得してもよい。図6は、本発明の一実施形態の変形例に係るナビゲーション装置の構成を示すブロック図である。図6において、本変形例に係るナビゲーション装置は、図1に示した一実施形態に係るナビゲーション装置と比較して、アンテナ位置推定部22はETCアンテナ5aを備えたETC送受信回路5に接続された点が異なる。一般に、ETCは、車載機、ETCカード及び路側機で構成され、車載機を車両に設置する際には、車両の大きさやナンバープレートなどの車両を特定する情報を車載機に入力するセットアップ処理が行われる。図6において、車両がETCゲートを通過するとき、車載機はセットアップ処理により入力された車両の情報とETCカードの情報とをETC送受信回路5により路側機に送信し、路側機は入口又は出口の情報、料金の情報等を車載機に送信し、車載機は路側機からの情報をETC送受信回路5により受信し、これらの一連の通信によって料金を決裁する。従って、このとき、路側機は、料金決裁情報等の一部としてゲート右位置Prおよびゲート左位置Plを追加して車載機に送信してもよい。ゲート位置の情報としては、30〜40byte程度のデータサイズで表現できる内容であり、ETCで使用される通信速度1024kbpsでは大きな負荷とはならない。また、車載機は、料金決裁情報の受信のタイミングでETCゲートを通過したと判断してもよい。この構成により、道路情報データベースメモリ3が予めETCゲートの位置を格納していなくても、アンテナ位置推定部22はETCゲートの位置を取得することができる。
【0029】
また、アンテナ位置推定部22はETCゲートを通過するときにアンテナ補正値Lcを算出したが、本発明はこれに限らず、ETCゲートに代えて駐車場のゲート等、他の特定施設を通過するときにアンテナ補正値Lcを算出してもよい。
【0030】
さらに、アンテナ補正値Lcを、過去所定回数のアンテナ推定距離Laの算出結果の平均値を求めることによって算出した。しかし、本発明はこれに限らず、例えば過去所定回数のアンテナ推定距離Laの算出結果のうち最も多い値をアンテナ補正値Lcとする等、他の方法を用いて算出してもよい。
【0031】
またさらに、アンテナ位置メモリ22mをアンテナ位置推定部22の内部に設けたが、本発明はこれに限らず、アンテナ位置推定部22の内部に代えてコントローラ2の内部又は外部に設けてもよい。
【産業上の利用可能性】
【0032】
本発明に係るナビゲーション装置によれば、現在位置及び前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部を備えたので、自動的にアンテナ設置位置を従来技術に比較して高精度で検出し、正しく位置を測定できる。
【0033】
本発明に係るナビゲーション装置は、例えばGPS衛星からの信号に基づいて車両の位置を測定する車載用ナビゲーション装置として利用することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合の測位位置C1を示す平面図である。
【図3】図1のナビゲーション装置を搭載した車両30が道路31を走行中である場合の測位位置C1と補正後の位置C2とを示す平面図である。
【図4】図1のナビゲーション装置を搭載した車両30がETCゲートを通過したときのアンテナ補正値Lcの算出方法を説明する平面図である。
【図5】図1のアンテナ位置推定部22により実行されるアンテナ位置推定処理を示すフローチャートである。
【図6】本発明の一実施形態の変形例に係るナビゲーション装置の構成を示すブロック図である。
【符号の説明】
【0035】
1…センサ回路部、
2…コントローラ、
3…道路情報データベースメモリ、
4…ディスプレイ、
5…ETC送受信回路、
5a…ETCアンテナ、
11…GPS受信機、
11a…GPSアンテナ、
12…車速センサ、
13…ジャイロセンサ、
14…加速度センサ、
21…測位部、
22…アンテナ位置推定部、
22m…アンテナ位置メモリ、
23…マッチング部、
30…車両、
31…道路、
32…ゲート道路。
【特許請求の範囲】
【請求項1】
所定の測位システムの各送信局からの無線信号に基づいて現在位置を測位する測位部と、
前記測位部により前回測位された現在位置を前回測位位置として格納する記憶部と、
前記現在位置及び前記前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部と、
前記アンテナ補正値を用いて現在位置を補正し、所定の地図データと前記補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行するマッチング部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
前記特定施設は、ETCゲート又は駐車場ゲートであることを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記特定施設から当該特定施設の位置情報を取得する受信部をさらに備え、
前記アンテナ位置算出部は、前記受信部により取得された前記特定施設の位置情報を用いてアンテナ補正値を算出することを特徴とする請求項1又は2記載のナビゲーション装置。
【請求項1】
所定の測位システムの各送信局からの無線信号に基づいて現在位置を測位する測位部と、
前記測位部により前回測位された現在位置を前回測位位置として格納する記憶部と、
前記現在位置及び前記前回測位位置に基づいて算出される走行軌跡情報と、予め位置の決まった特定施設の位置とに基づいて、アンテナ補正値を算出するアンテナ位置推定部と、
前記アンテナ補正値を用いて現在位置を補正し、所定の地図データと前記補正された現在位置とに基づいて、正確な車両位置を特定するようにマッチング処理を実行するマッチング部とを備えたことを特徴とするナビゲーション装置。
【請求項2】
前記特定施設は、ETCゲート又は駐車場ゲートであることを特徴とする請求項1記載のナビゲーション装置。
【請求項3】
前記特定施設から当該特定施設の位置情報を取得する受信部をさらに備え、
前記アンテナ位置算出部は、前記受信部により取得された前記特定施設の位置情報を用いてアンテナ補正値を算出することを特徴とする請求項1又は2記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−25116(P2009−25116A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−187964(P2007−187964)
【出願日】平成19年7月19日(2007.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月19日(2007.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]