
ナビゲーション装置
【課題】現在位置に基づく処理を、ナビゲーションが行われる環境に適合するように行う。
【解決手段】
経路7を示す経路データを取得する経路データ取得部132と、現在位置6を示す位置データを取得する位置データ取得部131と、現在位置6の周辺地域を示す地図データ200を取得する地図データ取得部13と、現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定部135と、リルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理部16と、現在位置6を示す位置データ、経路データ及び現在位置6の周辺地域を示す地図データ200に基づいて現在位置6と経路7との距離を計算し、計算された距離が現在位置6の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、リルート判定を行うリルート判定部134と、を備える。
【解決手段】
経路7を示す経路データを取得する経路データ取得部132と、現在位置6を示す位置データを取得する位置データ取得部131と、現在位置6の周辺地域を示す地図データ200を取得する地図データ取得部13と、現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定部135と、リルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理部16と、現在位置6を示す位置データ、経路データ及び現在位置6の周辺地域を示す地図データ200に基づいて現在位置6と経路7との距離を計算し、計算された距離が現在位置6の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、リルート判定を行うリルート判定部134と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションに関する。
【背景技術】
【0002】
従来、目的地までの経路を案内する機能(以下、「ナビゲーション機能」)を有する装置(以下、「ナビゲーション装置」)として、例えば、車載用のカーナビゲーションシステムや、ナビゲーション機能が搭載されたモバイル機器(例えば、携帯電話機や携帯情報端末やPNS(Portable navigation systems)等)等が知られている。
【0003】
一般に、ナビゲーション装置には、その現在位置を検出するための現在位置検出部(例えば、GPS(Global Positioning System)処理部)が備えられる。ナビゲーション装置は、現在位置検出部によって検出された現在位置が、設定された経路から外れていないかどうかを確認しながら、経路に沿ってユーザを目的地へ案内する。
【0004】
例えば、特許文献1には、ナビゲーション装置が、マルチパスの起きやすい場所に進入したと判定した場合、GPS受信機が受信した信号のうちC/N値が所定の閾値を超える信号のみを用いて測位点を演算する技術が記載されている。
【0005】
【特許文献1】特開2001−264076号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ナビゲーション装置は、ナビゲーションを行う中で、現在位置検出部によって検出された現在位置に基づいて、マップマッチング処理やリルート判定処理等を行う。ここで、マップマッチング処理とは、地図データを用いて、検出された現在位置を経路上の位置へ補正する処理のことである。また、リルート判定処理とは、経路を再探索する処理(以下、「リルート処理」)を行う必要があるか否かを判定する処理(即ち、経路から外れたか否かを判定する処理)のことである。
【0007】
マップマッチング処理やリルート判定処理等の、現在位置に基づく処理は、ナビゲーションが行われる環境(以下、「ナビゲーション環境」)の影響を受ける。ナビゲーション環境としては、例えば、現在位置の周辺地域がどのような都市タイプ(住宅地やビル街等)であるかや、ナビゲーション装置がどのような速度で移動しているか等が挙げられる。
【0008】
例えば、周辺地域がビル街の場合は、住宅地の場合に比べてマルチパスの影響を受けやすく、検出された現在位置が実際の位置からずれやすい。従って、周辺地域がどのような都市タイプであるかによって、検出される現在位置の正確さが異なり、ナビゲーション環境が、マップマッチング処理やリルート判定処理の精度に影響を与えることになる。特に、ナビゲーション装置がモバイル機器である場合、一般に、ナビゲーション装置にはジャイロセンサが備えられていないため、マップマッチング処理やリルート判定処理は、検出された現在位置のみに基づいて行われる。従って、モバイル機器の場合、現在位置の正確さが、マップマッチング処理やリルート判定処理の精度に大きな影響を与えることになる。また、例えば、ナビゲーション装置の移動速度が遅い場合は、経路から外れたことを早めに検知して早めにリルート処理を行う必要がある。
【0009】
そこで、本発明の目的は、現在位置に基づく処理を、ナビゲーションが行われる環境に適合するように行うことである。
【課題を解決するための手段】
【0010】
本発明の一つの実施態様に従うナビゲーション装置は、目的地までの経路を案内するナビゲーション装置であって、前記目的地までの経路を示す経路データを取得する経路データ取得手段と、前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理手段と、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行うリルート判定手段と、を備える。
【0011】
本発明に係る好適な実施形態では、前記位置データ取得手段は、定期的又は不定期的に、前記ナビゲーション装置の現在位置を示す位置データを取得し、前記閾値管理手段は、前記第一の閾値に加えて、前記リルート判定に用いられる第二の閾値を都市タイプごとに管理し、前記リルート判定手段は、前記位置データ取得手段が位置データを取得するごとに、前記現在位置と前記目的地までの経路との距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定するとともに、前記第一の閾値を超えた回数をカウントし、前記カウントされた回数が前記現在位置の周辺地域の都市タイプに対応する第二の閾値を超えたか否かを判定し、前記第二の閾値を超えた場合に経路の再探索が必要と判定してもよい。
【0012】
本発明に係る好適な実施形態では、前記閾値管理手段は、前記第一の閾値に加えて、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を都市タイプごとに管理し、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、を更に備えてもよい。
【0013】
本発明に係る好適な実施形態では、表示部と、前記リルート判定において経路の再探索が必要との結果が得られた場合、前記リルート判定の結果を前記表示部に表示させるとともに、経路の再探索を行うか否かの指示をユーザから受け付けるユーザ指示受付手段と、前記ユーザ指示受付手段が受け付けた指示に基づいて、前記第一の閾値及び/又は前記第二の閾値を修正する閾値修正手段と、を更に備えてもよい。
【0014】
本発明に係る好適な実施形態では、ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、を更に備え、前記閾値管理手段は、都市タイプ及びナビゲーションモードの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記選択されているナビゲーションモードの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0015】
本発明に係る好適な実施形態では、現在通過中の道路の道路タイプを取得する道路タイプ取得手段、を更に備え、前記閾値管理手段は、都市タイプ及び道路タイプの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0016】
本発明に係る好適な実施形態では、ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、現在通過中の道路の道路タイプを取得する道路タイプ取得手段と、を更に備え、前記閾値管理手段は、都市タイプ、ナビゲーションモード及び道路タイプの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ、前記選択されているナビゲーションモード及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0017】
本発明に係る好適な実施形態では、計数手段を更に備え、前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定してもよい。
【0018】
本発明の一つの実施態様に従うナビゲーション装置は、目的地までの経路を案内するナビゲーション装置であって、前記目的地までの経路を示す経路データを取得する経路データ取得手段と、前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を、都市タイプごとに管理する閾値管理手段と、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、を備える。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照しながら本発明の実施形態について詳細に説明する。
【0020】
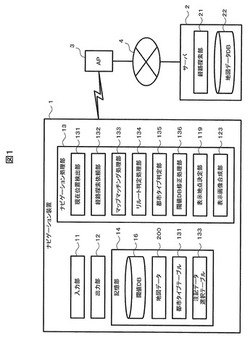
図1は、本発明の一実施形態に係るナビゲーション装置1とサーバ2とを有するシステムの構成例を示す図である。
【0021】
ナビゲーション装置1とサーバ2とが、アクセスポイント(AP)3及び通信ネットワーク4を介して、通信可能に接続されている。ナビゲーション装置1とAP3との間の接続は、無線通信により行われる。
【0022】
サーバ2は、ナビゲーション装置1の依頼に基づいて所定の処理を行うコンピュータである。サーバ2は、例えば、目的地までの経路の探索を行う経路探索部21と、ナビゲーション装置1へ提供可能な地図データの集合である地図データDB(データベース)22とを備える。
【0023】
ナビゲーション装置1は、目的地までの経路を案内する機能(ナビゲーション機能)を有するコンピュータである。ナビゲーション装置1としては、例えば、ナビゲーション機能を搭載したモバイル機器(携帯電話機や携帯情報端末等)が挙げられるが、それに限らず、据置型の装置、例えば、車載用のカーナビゲーションシステムであってもよい。ナビゲーション装置1の機能や構成は、ナビゲーション装置1が有する所定のハードウェアと、それらを制御する所定のソフトウェア(コンピュータプログラム)によって実現することができる。ナビゲーション装置1は、例えば、入力部11と、出力部12と、ナビゲーション処理部13と、記憶部14とを備える。
【0024】
入力部11は、ユーザからの入力を受け付けるための装置である。例えば、ナビゲーション装置1は、入力部11を介して、目的地の入力や、目的地までの経路の再探索を行うか否かの指示等をユーザから受け付ける。入力部11としては、例えば、プッシュボタン、キーボード、タッチパネル或いはポインティングデバイス等が採用される。
【0025】
出力部12は、ナビゲーション機能を実現するための種々の画面を出力するための装置である。例えば、出力部12は、ナビゲーション処理部13の指示に基づいて、目的地までの経路を案内するための画面(以下、「ナビゲーション画面」)を出力する。また、出力部12は、リルート判定処理部135の指示に基づいて、リルート判定処理部135によって行われた処理の結果を出力する。出力部12としては、例えば、液晶パネル等が採用される。
【0026】
ナビゲーション処理部13は、ナビゲーション機能を実現する処理部である。ナビゲーション処理部13は、例えば、ユーザから目的地の入力を受け付けて、ナビゲーション装置1の現在位置から目的地までの経路(以下、単に「経路」という)の設定を行う。設定される経路は、ナビゲーション装置1自身或いはサーバ2によって行われる経路の探索処理により決定される。本実施形態では、経路の探索処理は、サーバ2によって行われるものとする。ナビゲーション処理部13は、ナビゲーション装置1の現在位置の周辺地図及び設定された経路を示したナビゲーション画面を出力部12に出力するとともに、音声ガイダンス等によってユーザに進路(進むべき道路や曲がるべき交差点や右折か左折か等)を通知することで、ユーザを目的地まで案内する。
【0027】
ナビゲーション処理部13は、複数種類のナビゲーションを行うことができる。本実施形態では、ナビゲーションのタイプとして、車で移動するユーザを案内する「カーナビ」と、徒歩で移動するユーザを案内する「徒歩ナビ」とを考慮するものとする。ナビゲーションのタイプは、例えば、ナビゲーションが行われる際にユーザによって指定される。ナビゲーションのタイプを示す情報は、記憶部14に記憶される。
【0028】
ナビゲーション処理部13は、例えば、現在位置検出部131と、経路探索依頼部132と、マップマッチング処理部133と、リルート判定処理部134と、都市タイプ判定部135と、閾値DB作成処理部136と、表示地点決定部119と、表示画像合成部123とを備える。
【0029】
現在位置検出部131は、ナビゲーション装置1の現在位置の検出を行うものである。現在位置検出部131によって検出された現在位置を示す位置データ(例えば、緯度及び経度)は、記憶部14に記憶される。現在位置検出部131としては、例えば、GPS(Global Positioning System)処理部を採用することができる。GPS処理部が採用される場合、現在位置検出部131には、GPSアンテナが備えられる。現在位置検出部131は、GPSアンテナが受信したGPS信号を処理することにより、現在位置を示す位置データを特定することができる。現在位置検出部131は、例えば、定期的又は不定期的に、ナビゲーション装置1の現在位置を示す位置データを取得する。
【0030】
経路探索依頼部132は、経路の探索をサーバ2に依頼するものである。経路探索依頼部132は、経路の探索をサーバ2へ依頼する際、現在位置検出部131によって取得された現在位置を示す位置データとユーザから入力された目的地を示す位置データとをサーバ2へ渡す。経路の探索依頼を受けたサーバ2の経路探索部21は、現在位置から目的地までの一以上の経路を探索してその中から適切な一つの経路を決定し、決定した経路を示すデータ(以下、「経路データ」)を経路探索依頼部132へ送信する。ここで、経路は、連続する道路の組み合わせとして表現される。従って、経路データは、例えば、道路を示すデータ(以下、「道路データ」)のリストとして表現される。また、道路は、その道路上の複数のポイント(道路を定義づけるポイントであり、以下、「道路定義ポイント」)の組み合わせとして表現される。従って、道路データは、例えば、複数の道路定義ポイントを示す位置データ(緯度及び経度)のリストとして表現される。一の道路を定義する道路定義ポイントの数や、道路定義ポイント間の距離は任意である。また、道路データには、例えば、道路定義ポイントが交差点やインターチェンジ等であることを示す付加情報が含められる。経路データを受信した経路探索依頼部132は、経路データによって示される経路の設定を行う。受信した経路データは、記憶部14に記憶される。
【0031】
マップマッチング処理部133は、記憶部14に記憶されている地図データ200を用いて、現在位置検出部131によって検出された現在位置を補正する処理(以下、「マップマッチング処理」)を行うものである。マップマッチング処理は、現在位置検出部131によって現在位置が検出されるごとに行われる。マップマッチング処理の詳細については、後述する。
【0032】
リルート判定処理部134は、経路を再探索する処理(リルート処理)を行う必要があるか否かを判定する処理(以下、「リルート判定処理」)を行うものである。リルート判定処理も、マップマッチング処理と同様、現在位置検出部131によって現在位置が検出されるごとに行われる。リルート判定処理の詳細については、後述する。
【0033】
都市タイプ判定部135は、現在位置の周辺地域の都市タイプを判定する処理(以下、「都市タイプ判定処理」)を行うものである。都市タイプ判定処理は、現在位置の周辺地域を示す地図データに基づいて行われる。都市タイプ判定処理の詳細については、後述する。本実施形態では、都市タイプとして、単位エリアの建物レベル(例えば、単位エリアに存在する高い建物の数に基づいて決定されたレベル)が低い順に、住宅地、標準、ビル街の三種類を考慮するものとする。
【0034】
閾値DB修正処理部136は、閾値DB16に登録されている閾値の修正を行うものである。例えば、閾値DB修正処理部136は、マップマッチング処理やリルート判定処理の結果に対するユーザの指示の内容に基づいて、閾値DB16に登録されている閾値を修正することができる。
【0035】
表示地点決定部119及び表示画像合成部123の詳細については、後述する。
【0036】
記憶部14は、いわゆる記憶装置である。記憶部14には、例えば、サーバ2から取得した地図データ200や、閾値DB16や、現在位置を示す位置データや、設定された経路を示す経路データ等が記憶される。記憶部14に記憶されている地図データ200に基づく地図は、ナビゲーション画面に表示される。また、地図データ200は、マップマッチング処理及びリルート判定処理に利用される。ナビゲーション装置1は、例えば、予め対象範囲の全ての地図データ200をサーバ2から取得しておき、それらを記憶部14に記憶しておくことができる。また、ナビゲーション装置1は、ナビゲーション機能が利用される中で必要となった地図データ200を逐次サーバ2から取得して、それらを記憶部14に記憶することもできる。
【0037】
また、記憶部14には、都市タイプテーブル131と、注記データ選択テーブル133とが記憶される。都市タイプテーブル131及び注記データ選択テーブル133は、都市タイプ判定処理に利用されるテーブルである。都市タイプテーブル131及び注記データ選択テーブル133の詳細については、後述する。
【0038】
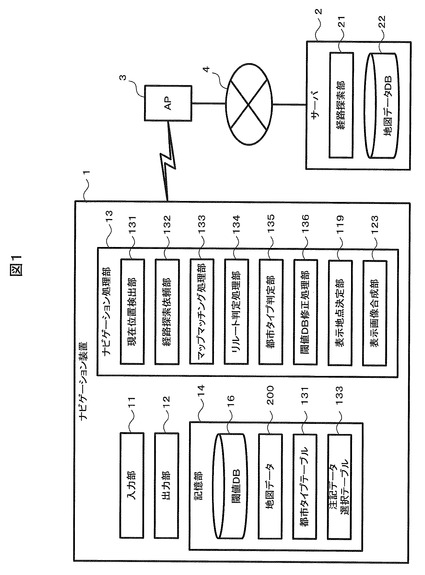
図2は、マップマッチング処理を説明する図である。
【0039】
図2には、現在位置検出部131によって検出された現在位置6とその周辺地図5とが示されている。矢印7が通過している道路70が、経路(経路の一部)である。以下、説明の便宜上、経路7と表現する。図2には、複数の現在位置6(マルで示された位置)が示されているが、参照番号のハイフン以下の数値が最も小さいもの(現在位置6−0)が直近に検出された現在位置6であり、ハイフン以下の数値が大きくなるにつれて、より過去に検出されたものとなっている。
【0040】
マップマッチング処理部133は、現在位置6が検出されるごとに、その検出された現在位置6と経路7との距離(以下、「現在位置−経路間距離」)8を計算する。そして、マップマッチング処理部133は、計算された現在位置−経路間距離8が所定の閾値(以下、「マップマッチング対象距離」)166以下であるか否かを判定する。現在位置−経路間距離8がマップマッチング対象距離166以下である場合は、マップマッチング処理部133は、現在位置6を、現在位置6に最も近い経路7上の位置(ひし形で示された位置)へ補正する。即ち、マップマッチング処理部133は、現在位置6を示す位置データを、現在位置検出部131によって検出された現在位置(補正前の現在位置)6を示す位置データから、補正前の現在位置6に最も近い経路7上の位置(補正後の現在位置)6’を示す位置データへ変更する。一方、現在位置−経路間距離8がマップマッチング対象距離166を超えている場合は、マップマッチング処理部133は、現在位置6の補正を行わない。即ち、この場合、現在位置6は、現在位置検出部131によって検出された現在位置6のままとなる。図2の例では、現在位置6−4〜6−8については、現在位置−経路間距離8がマップマッチング対象距離166以下となっている。従って、現在位置6−4〜6−8のそれぞれは、経路7上の位置6−4’〜6−8’へ補正される。一方、現在位置6−0〜6−3については、現在位置−経路間距離8がマップマッチング対象距離166を超えている。従って、現在位置6−0〜6−3のそれぞれは、補正されない。
【0041】
現在位置−経路間距離8は、現在位置6を示す位置データと経路7を示す経路データとに基づいて計算される。上述したように、経路データは、道路データのリストとして表現され、道路データは、道路定義ポイントを示す位置データのリストとして表現される。例えば、A点及びB点が、経路7を構成する道路70の道路定義ポイントであるとすると、A点とB点とを結ぶ直線が、A点及びB点間の経路を近似した線(以下、「経路近似線」)となる。従って、マップマッチング処理部133は、まず、A点を示す位置データ及びB点を示す位置データに基づいてA点とB点とを結ぶ直線(経路近似線)を計算する。そして、マップマッチング処理部133は、計算された経路近似線及び現在位置6を示す位置データに基づいて、計算された経路近似線と現在位置6との距離(即ち、現在位置−経路間距離8)を計算することができる。
【0042】
また、補正後の現在位置6’は、補正前の現在位置6に最も近い経路7上の位置とされる。従って、例えば、マップマッチング処理部133は、経路近似線及び補正前の現在位置6を示す位置データに基づいて、補正前の現在位置6と補正後の現在位置6’とを結ぶ直線が経路近似線と直交するように、補正後の現在位置6’を決定することができる。
【0043】
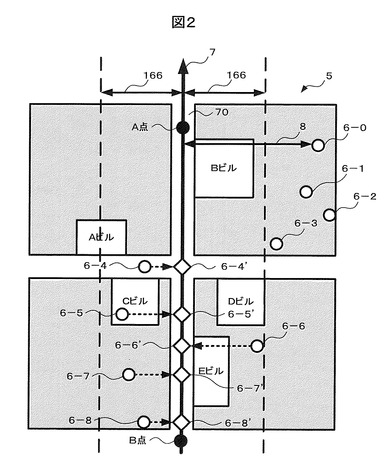
マップマッチング処理後の現在位置(補正された場合は補正後の現在位置6’、補正されない場合は現在位置検出部によって検出された現在位置6であり、以下、「マップマッチング処理後位置60」という)は、周辺地図5とともにナビゲーション画面に表示される。図3は、現在位置(マップマッチング処理後位置60)が表示されたナビゲーション画面の例を示している。即ち、現在位置−経路間距離8がマップマッチング対象距離166以下である現在位置6については、経路7上に表示され、現在位置−経路間距離8がマップマッチング対象距離166を超えている現在位置6については、現在位置検出部131によって検出された位置のまま表示される。尚、現在位置−経路間距離8がマップマッチング対象距離166を超えている現在位置6については、経路7とは異なる、現在位置6に最も近い道路上の位置に補正されて表示されてもよい。
【0044】
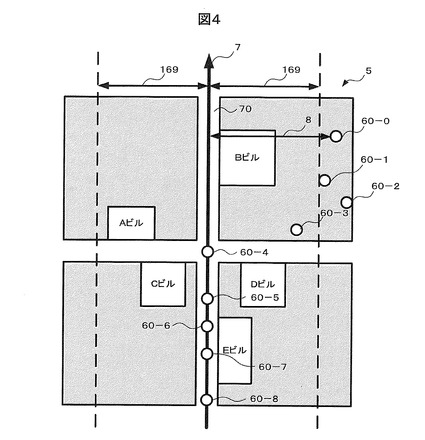
図4は、リルート判定処理を説明する図である。
【0045】
図4には、マップマッチング処理後位置60とその周辺地図5とが示されている。図2と同様に、矢印7が通過している道路70が、経路(経路の一部)である。また、マップマッチング処理後位置60のうち、参照番号のハイフン以下の数値が最も小さいもの(マップマッチング処理後位置60−0)が直近に検出された現在位置6であり、ハイフン以下の数値が大きくなるにつれて、より過去に検出されたものとなっている。
【0046】
リルート判定処理部134は、現在位置6が検出されてマップマッチング処理が行われた後、マップマッチング処理後位置60と経路7との距離(以下、「マップマッチング処理後位置−経路間距離」)を計算する。ここで、マップマッチング処理後位置60のうちマップマッチング処理において補正されたものについては、マップマッチング処理後位置−経路間距離は、“0”となる。マップマッチング処理後位置60は、経路7上にあるからである。一方、マップマッチング処理後位置60のうちマップマッチング処理において補正されていないものについては、マップマッチング処理後位置−経路間距離は、マップマッチング処理において計算された現在位置−経路間距離8となる。現在位置−経路間距離8は、マップマッチング処理において計算されたものがそのまま利用されてもよいし、リルート判定処理において改めて計算されてもよい。その後、リルート判定処理部134は、計算されたマップマッチング処理後位置−経路間距離が所定の閾値(以下、「リルート対象距離」)169を超えているか否かを判定する。そして、リルート判定処理部134は、マップマッチング処理後位置−経路間距離がリルート対象距離169を超えた回数をカウントする。そして、リルート判定処理部134は、カウントした回数が所定の閾値(以下、「リルート対象回数」)168を超えているか否かを判定する。カウントした回数がリルート対象回数168を超えている場合は、リルート判定処理部134は、リルート処理が必要と判定する。
【0047】
尚、本実施形態では、マップマッチング処理が行われた後の現在位置(即ち、マップマッチング処理後位置60)についてリルート判定処理が行われる例を示したが、必ずしもこれに限定されるものではない。例えば、マップマッチング処理が行われる前の現在位置(即ち、現在位置検出部131によって検出された現在位置6)についてリルート判定処理が行われてもよい。
【0048】
上述したように、マップマッチング処理やリルート判定処理では、幾つかの閾値(本実施形態では、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169)が利用される。本実施形態に係るナビゲーション装置1は、マップマッチング処理やリルート判定処理において、ナビゲーションが行われる環境(ナビゲーション環境)の違いに応じて異なる値の閾値(ナビゲーション環境に適合する値の閾値)を利用する。ナビゲーション環境としては様々なものが考えられるが、本実施形態では、ナビゲーション環境として、ナビゲーションのタイプが何であるか(“カーナビ”であるか或いは“徒歩ナビ”であるか)と、現在位置6の周辺地域の都市タイプが何であるか(“住宅地”であるか“標準”であるか或いは“ビル街”であるか)と、通過中の道路のタイプが何であるか(“一般道”であるか或いは“高速道”であるか)とを考慮するものとする。
【0049】
例えば、現在位置6の周辺地域の都市タイプが“ビル街”である場合は、マルチパスの影響を受けやすいため、現在位置検出部131によって検出される位置が実際の位置からずれる可能性が高い。そのため、リルート判定処理に関しては、都市タイプが“ビル街”の場合にリルート対象距離169を小さく設定しすぎたりリルート対象回数168を小さく設定しすぎたりすると、実際は経路7から外れていないにもかかわらずリルート処理が行われてしまうという可能性が高くなる。そこで、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、リルート対象距離169及び/又はリルート対象回数168をより大きく設定して、よりリルート処理が行われにくくすることができる(リルート処理が必要との判定が、より得られにくいようにすることができる)。これにより、実際は経路7から外れていない場合の無駄なリルート処理を行わないようにすることができる。また、マップマッチング処理に関しては、都市タイプが“ビル街”の場合にマップマッチング対象距離166を小さく設定しすぎると、実際の位置が経路7からそれ程離れていないにもかかわらず経路7上の位置に補正されないという可能性が高くなる。そこで、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、マップマッチング対象距離166をより大きく設定して、より現在位置6の補正が行われやすくすることができる。
【0050】
また、例えば、ナビゲーション装置1の移動速度が遅い場合は、経路7から外れたことを早めに検知して早めにリルート処理を行う必要がある。従って、ナビゲーションのタイプが“徒歩ナビ”の場合は、“カーナビ”の場合よりもリルート対象距離169及び/又はリルート対象回数168を小さく設定して、よりリルート処理が行われやすくすることができる(リルート処理が必要との判定が、より得られやすいようにすることができる)。また、道路タイプが“一般道”の場合は、“高速道”の場合よりもリルート対象距離169及び/又はリルート対象回数168を小さく設定して、よりリルート処理が行われやすくすることもできる。
【0051】
このように、本実施形態に係るナビゲーション装置1は、ナビゲーション環境の違いに応じて異なる値の閾値を利用するため、ナビゲーション環境に適合した適切なマップマッチング処理及びリルート判定処理を行うことができる。
【0052】
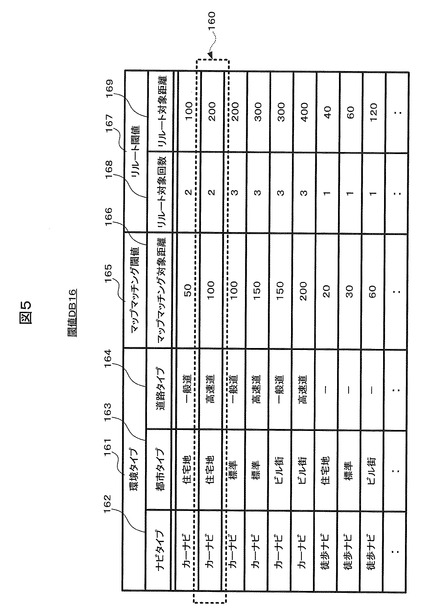
図5は、閾値DB16の一例を示す図である。
【0053】
閾値DB16は、マップマッチング処理及びリルート判定処理に用いられる閾値を管理するDBである。閾値DB16は、一以上の閾値データ160の集合である。閾値データ160には、例えば、ナビゲーション環境の環境タイプ161ごとに、マップマッチング処理に利用される閾値(以下、「マップマッチング閾値」)165とリルート判定処理に利用される閾値(以下、「リルート閾値」)167とが含まれる。即ち、閾値データ160は、対応する環境タイプ161の下で利用されるマップマッチング閾値165とリルート閾値167とを定義している。環境タイプ161には、例えば、ナビタイプ162と、都市タイプ163と、道路タイプ164とが含まれる。マップマッチング閾値165には、例えば、マップマッチング対象距離166が含まれる。リルート閾値167には、例えば、リルート対象回数168と、リルート対象距離169とが含まれる。
【0054】
ナビタイプ162は、ナビゲーションのタイプを示す情報である。例えば、ナビタイプ162は、ナビゲーションのタイプが“カーナビ”である場合は“カーナビ”とされ、ナビゲーションのタイプが“徒歩ナビ”である場合は“徒歩ナビ”とされる。
【0055】
都市タイプ163は、都市タイプを示す情報である。例えば、都市タイプ163は、都市タイプが“住宅地”である場合は“住宅地”とされ、都市タイプが“標準”である場合は“標準”とされ、都市タイプが“ビル街”である場合は“ビル街”とされる。
【0056】
道路タイプ164は、道路のタイプを示す情報である。例えば、道路タイプ164は、道路のタイプが一般道である場合は“一般道”とされ、道路のタイプが高速道である場合は“高速道”とされる。
【0057】
図5の例では、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169が、より大きな値とされている(“標準”及び“ビル街”のリルート対象回数168は同じ値である)。また、ナビゲーション装置1の移動速度が遅いものほど(即ち、“カーナビ”→“徒歩ナビ”の順に、或いは“高速道”→“一般道”の順に)、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169が、より小さな値とされている(“高速道”及び“一般道”のリルート対象回数168は同じ値である)。
【0058】
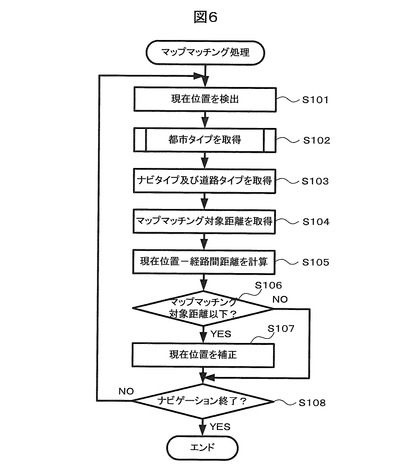
図6は、マップマッチング処理のフローチャートである。
【0059】
まず、現在位置検出部131が、ナビゲーション装置1の現在位置6を検出する(S101)。現在位置検出部131は、検出した現在位置6を示す位置データ(緯度及び経度)を記憶部14に記憶する。
【0060】
次に、マップマッチング処理部133は、現在位置6の周辺地域の都市タイプを都市タイプ判定部135に取得させる(S102)。
【0061】
次に、マップマッチング処理部133は、現在行われているナビゲーションのタイプと現在通過中の道路のタイプとを取得する(S103)。具体的には、マップマッチング処理部133は、記憶部14に記憶されているナビゲーションのタイプを示す情報を参照することで、現在行われているナビゲーションのタイプを取得することができる。また、マップマッチング処理部133は、次のようにして現在通過中の道路のタイプを取得することができる。即ち、ナビゲーション装置1は、ナビゲーションを行う中で、ナビゲーション装置1が、経路を構成する道路のどの道路定義ポイントまで通過したかを記録している。従って、ナビゲーション装置1は、直近に通過した道路定義ポイントを調べることにより、経路データを基に、現在通過中の道路を特定することができる。そして、経路データには、その経路を構成する道路ごとに、道路のタイプを示す情報が含まれている。従って、ナビゲーション装置1は、特定された道路(即ち、現在通過中の道路)のタイプを、経路データから取得することができる。尚、地図データにも、地図データに含まれる道路ごとに、道路のタイプを示す情報が含まれている。従って、ナビゲーション装置1は、特定された道路のタイプを、地図データから取得することもできる。
【0062】
次に、マップマッチング処理部133は、S102及びS103で取得したナビゲーションのタイプ、都市タイプ及び道路のタイプに対応するマップマッチング閾値165(マップマッチング対象距離166)を閾値DB16から取得する(S104)。
【0063】
その後、マップマッチング処理部133は、S101で検出された現在位置6を示す位置データと記憶部14に記憶されている経路7を示す経路データとに基づいて、現在位置−経路間距離8を計算する(S105)。
【0064】
その後、マップマッチング処理部133は、S105で計算された現在位置−経路間距離8が、S104で取得したマップマッチング対象距離166以下であるか否かを判定する(S106)。
【0065】
現在位置−経路間距離8がマップマッチング対象距離166以下である場合は(S106:YES)、マップマッチング処理部133は、現在位置6の補正を行う(S107)。具体的には、マップマッチング処理部133は、ナビゲーション装置1の現在位置6を、現在位置検出部131によって取得された現在位置(補正前の現在位置)6から、補正前の現在位置に最も近い経路上の位置(補正後の現在位置)6’へ補正する。
【0066】
一方、現在位置−経路間距離8がマップマッチング対象距離166を超えている場合は(S106:NO)、マップマッチング処理部133は、現在位置6の補正を行わない。
【0067】
ナビゲーションが終了するまで、S101からS107までの処理が繰り返して行われる(S108)。
【0068】
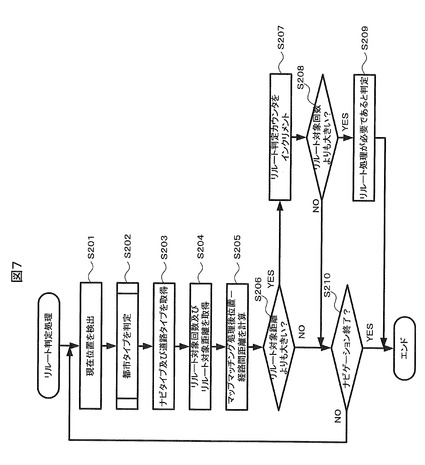
図7は、リルート判定処理のフローチャートである。
【0069】
ナビゲーションが開始される前に、リルート判定処理に利用されるカウンタ(以下、「リルート判定カウンタ」)が初期化される。具体的には、リルート判定カウンタが“0”に設定される。
【0070】
まず、現在位置検出部131が、ナビゲーション装置1の現在位置6を検出する(S201)。現在位置検出部131は、検出した現在位置6を示す位置データ(緯度及び経度)を記憶部14に記憶する。
【0071】
次に、リルート判定処理部134は、現在位置6の周辺地域の都市タイプを都市タイプ判定部135に取得させる(S202)。
【0072】
次に、マップマッチング処理部133は、現在行われているナビゲーションのタイプと現在通過中の道路のタイプとを取得する(S203)。この処理は、図6におけるS103と同様にして行われる。
【0073】
次に、リルート判定処理部134は、S202及びS203で取得したナビゲーションのタイプ、都市タイプ及び道路のタイプに対応するリルート閾値167(リルート対象回数168及びリルート対象距離169)を閾値DB16から取得する(S204)。
【0074】
その後、リルート判定処理部134は、S201で検出された現在位置6を示す位置データと記憶部14に記憶されている経路7とを示す経路データとに基づいて、マップマッチング処理後位置−経路間距離を計算する(S205)。上述したように、マップマッチング処理後位置60のうちマップマッチング処理において補正されたものについては、マップマッチング処理後位置−経路間距離は、“0”となる。また、マップマッチング処理後位置60のうちマップマッチング処理において補正されていないものについては、マップマッチング処理後位置−経路間距離は、マップマッチング処理において計算された現在位置−経路間距離8となる。従って、S205においてマップマッチング処理後位置−経路間距離を計算せずに、図6におけるS105で計算された現在位置−経路間距離8が利用されてもよい。
【0075】
その後、リルート判定処理部134は、S205で計算されたマップマッチング処理後位置−経路間距離が、S204で取得したリルート対象距離169を超えているか否かを判定する(S206)。
【0076】
マップマッチング処理後位置−経路間距離がリルート対象距離169を超えている場合は(S206:YES)、リルート判定処理部134は、リルート判定カウンタをインクリメントする(S207)。
【0077】
その後、リルート判定処理部134は、リルート判定カウンタの値がリルート対象回数168を超えているか否かを判定する(S208)。
【0078】
リルート判定カウンタの値がリルート対象回数168を超えている場合は(S208:YES)、リルート判定処理部134は、リルート処理が必要と判定する(S209)。リルート処理が必要と判定されると、リルート判定処理部134は、リルート処理が必要と判定された旨を、出力部12を介してユーザに通知する。ユーザは、この通知に対して、リルート処理を行うことの指示か或いはリルート処理を行わないことの指示を入力部11に入力することができる。リルート処理を行うことの指示を受け付けた場合、リルート判定処理部134は、リルート処理の開始を経路探索依頼部132へ指示する。指示を受けた経路探索依頼部132は、経路の探索をサーバ2へ依頼する。その後、新たに決定された経路を示す経路データをサーバ2から受信したナビゲーション装置1は、受信した経路データによって示される経路の設定を行い、ナビゲーションを再開する。一方、リルート処理を行わないことの指示を受け付けた場合、リルート処理は行われずにナビゲーションが継続して行われる。この場合、例えば、閾値DB修正処理部136は、閾値DB16におけるリルート閾値167を修正することができる。具体的には、例えば、図5の例であれば、環境タイプ161として、ナビゲーションのタイプが“カーナビ”、都市タイプが“住宅地”且つ道路のタイプが“一般道”であった場合、リルート対象回数168として“2”が、リルート対象距離169として“100”が、それぞれ利用される。これらの閾値が利用されてリルート処理が必要と判定された際に、リルート処理を行わないことの指示を受け付けた場合、閾値DB修正処理部136は、例えば、リルート対象回数168を“2”よりも大きい値へ修正し、及び/又は、リルート対象距離169を“100”よりも大きい値へ修正することができる。これにより、リルート処理が必要との判定が、これまでよりも得られにくいようにすることができる。
【0079】
ナビゲーションが終了するまで、S201からS208までの処理が繰り返して行われる(S210)。
【0080】
以下、都市タイプ判定処理の詳細を説明する。
【0081】
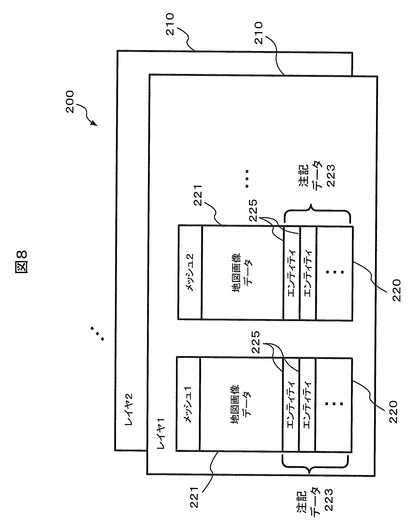
図8は、地図データ200のデータ構造を示す。
【0082】
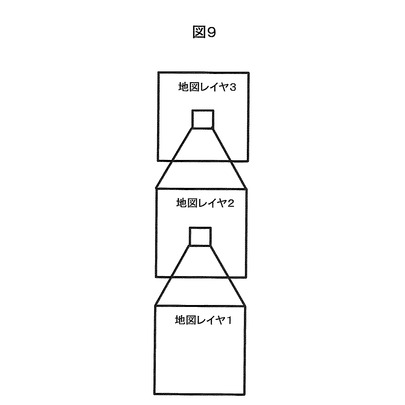
同図に示すように、地図データ200は、複数のレイヤ210、210,・・・から構成されている。レイヤ210、210,・・・は、例えば、図9に示すように、地図画像の縮尺に応じて階層化されている。それぞれのレイヤ210のデータは、地図画像を所定の大きさに区切ったメッシュ220単位で構成されている。ここでは、最も細かいメッシュ220を有するレイヤ、つまり詳細な地図画像を有するレイヤをレイヤ1とし、メッシュサイズが粗くなるにつれて、レイヤ2,レイヤ3となり、最も粗いメッシュを有するレイヤ6までの6階層としても良い。
【0083】
各メッシュ220は、それぞれのメッシュの地図画像データ221と、各メッシュの地図画像上の注記データ223とを有する。
【0084】
地図画像データ221は、複数のポリゴンデータ及びポリラインデータを含む。各ポリゴンデータ及びポリラインデータは、それぞれの特性を示す属性情報及び位置情報を有する。
【0085】
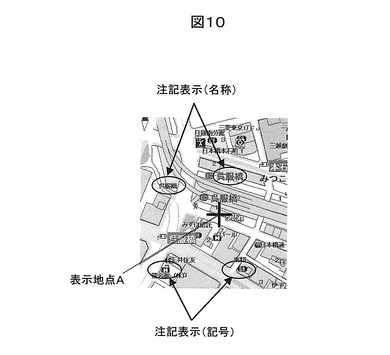
注記データ223は、複数のエンティティ225,225,・・・によって構成されている。各エンティティ225,225,・・・は、それぞれ一つの注記表示(スポット表示)を行うためのデータである。図10は、出力部12に表示される表示画面の一例である。注記表示とは、例えば、図10に示すような地図画像上に表示された種々の文字、記号、図形、マークなどをいう。従って、各エンティティ225,225,・・・には、これらの文字、記号、図形、マークなどのデータが含まれていても良い。また、各エンティティ225,225,・・・には、各種名称(例えば、地名(住所)、地域名、河川名、及び各種ランドマーク(建築物、構造物)の名称など)のテキストデータや、店舗のマークなどの画像データが含まれていても良い。さらに、各エンティティ225,225,・・・には、各注記表示の属性を示すデータも含まれている。属性とは、例えば、各注記表示が示しているものの種別(住所、交差点、コンビニ、ガソリンスタンド、駅、等)や、各注記表示が配置される位置の情報が含まれる。
【0086】
表示地点決定部119は、入力部11または現在位置検出部131の出力に基づいて、出力部12に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)を決定する。例えば、入力部11から、出力部12に表示させるべき位置情報(例えば、緯度および経度、住所、ランドマークの名称など)の通知を受けたとき、または、出力部12に既に表示されている地図をスクロールさせるための入力を受けたとき、あるいは、現在位置検出部131から現在位置の位置情報の通知を受けたときに、それらに基づいて、表示地点決定部119は、出力部12に表示する表示地点Cを決定する。ここで、表示地点Cとは、例えば、出力部12の特定の位置(例えば中心)に表示される地点(図10参照)の緯度及び経度でよい。
【0087】
都市タイプ判定部135は、注記表示計数処理と都市タイプ判定処理とを行って、表示地点決定部119が決定した表示地点の都市タイプを判定する。ここで、都市タイプとは、地図における注記表示の混雑度合い、つまり、単位面積あたりの注記表示データ223のエンティティ225の個数の多さ(密度)を示すものである。これは、開発(都市化)が進んだ地域ほど地図上の注記表示が密であり、つまり単位面積あたりの注記表示データ223のエンティティ225の個数が多いという特徴があるからである。また、これとは反対に、山間部などの開発が進んでいない地域では注記表示が疎であり、つまり単位面積あたり注記表示データ223のエンティティ225の個数が少ないという特徴があるためである。従って、この注記表示の混雑度合いは、実質的には都市化の度合いを示すものとして、本実施形態では都市タイプ判定を行っている。
【0088】
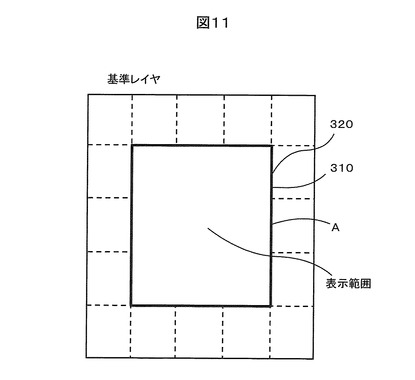
次に、図11を参照して、都市タイプ判定部135が行う注記表示計数処理、及び都市タイプ判定処理について説明する。図11は、予め定められた基準レイヤのメッシュに分割された地図画像を示す。基準レイヤは、複数のレイヤのうちのいずれかに予め定められていてもよい。
【0089】
注記表示計数処理では、例えば、以下のような処理が行われる。すなわち、都市タイプ判定部135は、表示地点決定部119が定めた表示地点Cを取得すると、図11に示すように、基準レイヤにおける表示地点C及びその周辺領域を含む1以上のメッシュを探索範囲320として特定する。ここで、探索範囲320は、例えば、図11に示すように、表示地点Cを含むメッシュ310と、そのメッシュ310に接する全メッシュ(メッシュ310の周辺の全メッシュ)を探索範囲320としてもよい。あるいは、探索範囲320は、メッシュ310のみでも良いし、メッシュ310と上下左右に隣り合う4つのメッシュを含む5メッシュで構成しても良い。
【0090】
都市タイプ判定部135は、探索範囲320に属する各メッシュ220の注記データ223を、記憶部14から取得する。そして、都市タイプ判定部135は、メッシュごとに、それぞれのメッシュ220の注記データ223内のエンティティ225の数を計数する。さらに、都市タイプ判定部135は、探索範囲320全体のエンティティ数の総計を求める。探索範囲320全体のエンティティ数の総計を求める際、都市タイプ判定部135は、各メッシュ別のエンティティ数に所定の重み係数をかけてから総計を算出しても良い。例えば、表示地点Cが属するメッシュ310の重み係数を周辺よりも大きくしたり、メッシュ310と上下または左右方向に隣り合っているメッシュの重み係数を、斜め方向に隣り合っているメッシュの重み係数より大きくしたりしても良い。都市タイプ判定部135は、ここで算出したエンティティ数の総計を、探索範囲320のメッシュ数で割って、探索範囲320のメッシュあたりのエンティティ数(平均エンティティ数)を算出する。
【0091】
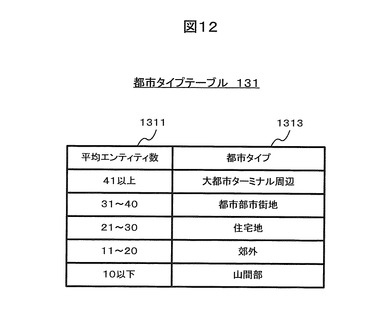
都市タイプ判定処理では、例えば以下のような処理が行われる。すなわち、都市タイプ判定部135は、上述の注記表示計数処理で算出した平均エンティティ数に基づいて、都市タイプテーブル131を参照して、都市タイプを判定する。
【0092】
なお、注記表示のエンティティ数は、レイヤによってその数が異なるので、上記の処理は基準レイヤを定めて行うことが好ましい。また、基準レイヤは、中程度のメッシュの細かさのレイヤ(例えばレイヤ3)としても良い。これは、ある程度広い範囲で判定を行った方が、都市としての特性を把握しやすいからである。
【0093】
図12は、都市タイプテーブル131の一例を示す。すなわち、都市タイプテーブル131は、平均エンティティ数1311と都市タイプ1313とを対応付けて記憶している。
【0094】
なお、上述した注記表示計数処理及び都市タイプ判定処理では、表示地点決定部119が定めた表示地点Cの都市タイプを判定しているが、都市タイプ判定部135は、これ以外の地点の都市タイプを判定することもできる。すなわち、都市タイプ判定部135は、指定された任意の地点の都市タイプを、上述と同様の手順で判定することができる。
【0095】
表示地点決定部119によって表示地点Cが決定されるたびに、都市タイプ判定部135が都市タイプの判定を行うようにしてもよい。つまり、出力部12に表示させる地図画像が切り替わるたびに、その都度、都市タイプ判定部135が表示地点Cの都市タイプ判定を行っても良い。あるいは、これとは反対に、出力部12に表示させる地図画像をスクロールするようなときであって、そのスクロール幅が小さいときなどは、都市タイプ判定部135は、表示地点Cの都市タイプ判定を毎回行わなくても良い。つまり、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点との変位量が所定以下であるときは、都市タイプ判定部135による都市タイプ判定を省略して、表示画像合成部123は、過去の都市タイプ判定結果を利用しても良い。あるいは、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点とが、あるレイヤ(例えば、最も詳細なメッシュのレイヤ1)において同一メッシュに含まれているときは、都市タイプ判定を省略しても良い。
【0096】
表示画像合成部123は、注記表示の選択処理を行う注記表示選択処理と、画像処理とを行う。そして、画像処理においては、注記表示選択手段によって選択された注記表示を含む表示画像を合成し、出力部12に表示させる。
【0097】
表示画像合成部123は、注記表示選択処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、出力部12に表示させる地図のレイヤ(表示レイヤ)、及び表示させる範囲(表示範囲)が定まると、それに対応する地図画像データ221を記憶部14から取得する。表示範囲は、例えば、表示レイヤ、表示時点A及び表示させる地図の縮尺により定まる。従って、表示画像合成部123は、例えば、出力部12に表示させる表示レイヤ、表示時点A及び表示させる地図の縮尺に応じて、地図画像データ221を記憶部14から取得しても良い。なお、出力部12に表示させる表示レイヤ及び地図の縮尺は、ユーザの入力、またはナビゲーション装置1内の図示しない他のアプリケーションからの指示などに応じて定めてもよい。
【0098】
表示画像合成部123は、さらに、上述の表示範囲に含まれている注記データ223のエンティティ225を記憶部14から取得して、都市タイプ(あるいは都市タイプ判定部135が算出した平均エンティティ数)に応じて、表示範囲に表示させる注記表示を選択する。例えば、表示画像合成部123は、表示地点C、表示レイヤ及び縮尺に基づいて、表示範囲に含まれる注記表示のエンティティ225を取得する。そして、表示画像合成部123は、都市タイプ判定部135で判定された都市タイプ、及び注記データ選択テーブル133に従って、エンティティ225を選択する。
【0099】
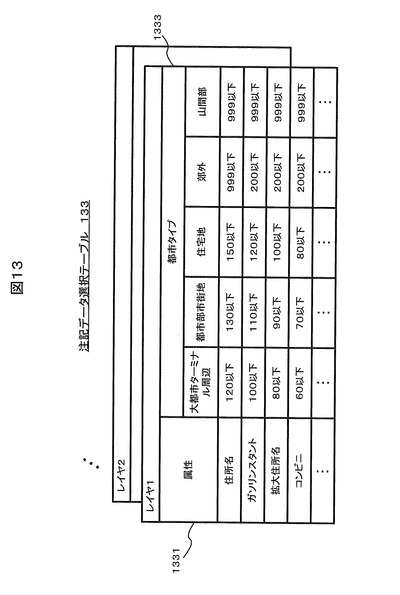
注記データ選択テーブル133は、レイヤ及び都市タイプに応じて、表示画像に含める注記表示の属性を定めている。
【0100】
図13は、注記データ選択テーブル133の一例を示す。同図に示す例では、レイヤごとにテーブルが構成されている。各テーブルでは、属性別、都市タイプ別に、注記表示を表示する縮尺の範囲が規定されている。例えば、同図の例では、都市タイプが「大都市ターミナル周辺」の場合、「住所名」は縮尺が「120」以下のときに表示され、「ガソリンスタンドマーク」は縮尺が「100」以下のときに表示され、「拡大住所名」は縮尺が「80」以下のときに表示され、「コンビニ表示」は縮尺が「60」以下のときに表示される。
【0101】
なお、図13の例で示す縮尺とはレイヤ別の表示縮尺である。この縮尺は、数値が大きいほど地図は拡大されていて、数値が小さいほど地図は縮小されている。
【0102】
表示画像合成部123は、画像処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、地図画像の上に注記表示を重ねて、出力部12に表示させる合成画像(図10参照)を生成する。そして、表示画像合成部123は、上記のようにして合成した画像を出力部12に表示させる。
【0103】
なお、表示地点Cが切り替わるごとに都市タイプ判定部135が都市タイプ判定を行っているとき、都市タイプが切り替わる境界付近では、都市タイプ判定部135の判定結果が、不安定にぶれることがある。そこで、このぶれによる影響を受けないようにするために、表示画像合成部123は、例えば以下のようにしても良い。すなわち、ある都市タイプから別の都市タイプへ切り替わるとき、表示画像合成部123が注記データ選択処理において採用する都市タイプは、例えば以下のようにして切り替えてもよい。すなわち、都市タイプ判定部135による判定結果が、連続して第1の都市タイプ(例えば「大都市ターミナル周辺」)である状態から、第2の都市タイプ(例えば「市街地」)へ切り替わったとき、表示画像合成部123は、所定回数以上連続して第2の都市タイプが検出されるまでは、第1の都市タイプのままで処理を行う。そして、所定回数以上連続して第2の都市タイプが検出されると、表示画像合成部123は、それ以降の処理を第2の都市タイプを用いて処理を行う。これにより、都市タイプが切り替わる境界付近において、都市タイプ判定部135による判定結果がぶれることがあっても、その影響を受けず、注記表示の表示レベルの切り替えを安定的に行うことができる。
【0104】
次に、上述した構成を備えるナビゲーション装置1における処理手順について、図14及び図15を用いて説明する。
【0105】
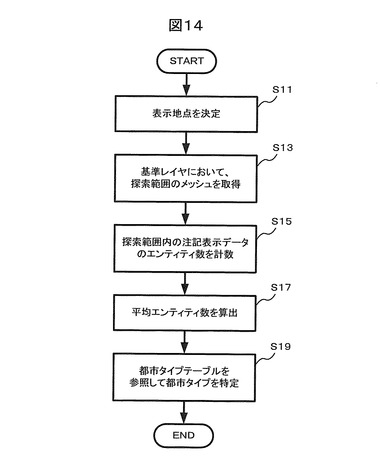
図14は、地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。なお、以下の処理を行う前に、予めナビゲーション処理部13が必要な地図データをサーバ2から取得して、記憶部14に格納しておく。
【0106】
まず、表示地点決定部119が表示地点Cを決定する(S11)。
【0107】
都市タイプ判定部135は、表示地点決定部119が定めた表示地点Cを取得すると、所定の基準レイヤにおいて、この表示地点C及びその周辺領域を含む探索範囲のメッシュ220を定める。そして、記憶部14を参照し、基準レイヤの探索範囲内のメッシュ220から、注記データ223を取得する(S13)。
【0108】
都市タイプ判定部135は、ステップS13で取得した注記データ223のエンティティ225の数の総計を計数する(S15)。このとき、都市タイプ判定部135は、上述したような重み係数による重み付けを行っても良い。
【0109】
都市タイプ判定部135は、ステップS15で計数したエンティティ数の総計から、平均エンティティ数を算出する(S17)。
【0110】
都市タイプ判定部135は、都市タイプテーブル131を参照して、ステップS17で算出した平均エンティティ数に対応する都市タイプを特定する(S19)。
【0111】
上述した処理により、地図データに基づいて、表示地点の都市タイプを判定することができる。
【0112】
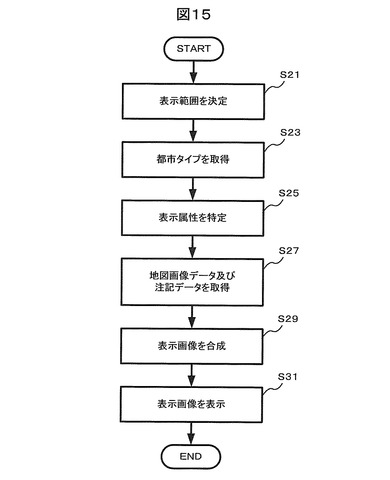
図15は、表示画像の合成及び表示の手順を示すフローチャートである。
【0113】
表示レイヤ、表示地点C及び表示縮尺が特定されると、表示画像合成部123は出力部12に表示させる表示範囲を決定する(S21)。
【0114】
表示画像合成部123は、都市タイプ判定部135が定めた都市タイプを取得する(S23)。
【0115】
表示画像合成部123は、注記データ選択テーブル133を参照して、都市タイプ、表示レイヤ及び表示縮尺から、表示画面に含めて表示させる注記表示の属性を特定する(S25)。
【0116】
表示画像合成部123は、表示レイヤの表示範囲の地図画像データ221及び注記データ223を、記憶部14から取得する(S27)。
【0117】
表示画像合成部123は、ステップS27で取得した注記データ223のうち、ステップS25で特定された注記表示の属性のエンティティ225を抽出する。そして、ステップS27で取得した地図画像データ221に基づく地図画像に、ここで抽出したエンティティに基づく注記表示を重ねた表示画像を合成する(S29)。
【0118】
そして、表示画像合成部123は、その表示画像を出力部12に表示させる(S31)。
【0119】
これにより、本実施形態によれば、地図画像が表示される地域の特性に応じた注記表示を行うことができる。
【0120】
なお、この第二の実施形態を抽象的に表現するならば、例えば下記のように表現できる。
【0121】
[表現1]
表示部を備えた地図表示装置であって、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
前記表示部に表示される表示地点を決定する表示地点決定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記表示地点決定手段によって決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択する注記表示選択手段と、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる画像処理手段と、を備える地図表示装置。
【0122】
[表現2]
前記計数手段の計数結果に基づいて、前記表示地点の都市タイプを判定する都市タイプ判定手段をさらに備え、
前記注記表示データは、各注記表示の属性を示す属性データを含み、
前記注記表示選択手段は、前記都市タイプ判定手段によって判定された都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定し、前記表示レイヤの前記表示範囲内の注記表示データから、前記特定された属性の注記表示データを選択することを特徴とする表現1記載の地図表示装置。
【0123】
[表現3]
前記表示地点決定手段によって表示地点が決定されるたびに、前記都市タイプ判定手段が都市タイプの判定を行い、前記注記表示選択手段が前記都市タイプ判定手段の判定結果に従って前記注記表示データの属性の特定を行うように構成されているときに、
前記都市タイプ判定手段による判定結果が第1の都市タイプから第2の都市タイプに切り替わったときは、前記注記表示選択手段は、所定回数以上連続して第2の都市タイプが検出される前は前記第1の都市タイプに従って前記注記表示データの属性の特定を行い、前記所定回数以上連続して第2の都市タイプが検出された後は前記第2の都市タイプに従って前記注記表示データの属性の特定を行うことを特徴とする表現2に記載の地図表示装置。
【0124】
[表現4]
前記表示地点決定手段によって決定した最新の表示地点と、前記最新の表示地点よりも以前に決定された表示地点との変位量が所定以下のときは、前記都市タイプ判定手段は都市タイプの判定を行わず、
前記注記表示選択手段は、前記以前に決定された表示地点に対応する都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定することを特徴とする表現2記載の地図表示装置。
【0125】
[表現5]
前記計数手段は、
前記探索範囲に、前記表示地点を含む第1のメッシュ及び前記第1のメッシュの周辺の一以上の第2のメッシュを含め、
前記第2のメッシュの内の注記表示個数よりも、前記第1のメッシュ内の注記表示個数に重み付けを行って前記注記表示の個数を計数することを特徴とする表現1〜4のいずれかに記載の地図表示装置。
【0126】
[表現6]
前記注記表示データは、前記地図画像上の複数の注記表示にそれぞれ対応した、複数のデータエンティティによって構成されていて、
前記計数手段が行う前記注記表示の個数の計数は、前記データエンティティの個数の計数であることを特徴とする表現1〜5のいずれかに記載の地図表示装置。
【0127】
[表現7]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、を備える地図表示方法。
【0128】
[表現8]
地図を表示するためのコンピュータプログラムであって、
コンピュータに実行されると、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、が行われるコンピュータプログラム。
【0129】
[表現9]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
都市化判定基準地点を指定する指定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記都市化判定基準地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記計数手段の計数結果に基づいて、前記都市化判定基準地点の都市タイプを判定する都市タイプ判定手段とを備える、地図データから都市タイプを判定する装置。
【0130】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。本発明は、その要旨を逸脱することなく、その他の様々な態様でも実施することができる。
【図面の簡単な説明】
【0131】
【図1】本発明の一実施形態に係るナビゲーション装置とサーバとを有するシステムの構成例を示す図である。
【図2】マップマッチング処理を説明する図である。
【図3】現在位置が表示されたナビゲーション画面の一例を示す図である。
【図4】リルート判定処理を説明する図である。
【図5】閾値DBの一例を示す図である。
【図6】マップマッチング処理のフローチャートである。
【図7】リルート判定処理のフローチャートである。
【図8】地図データのデータ構造である。
【図9】レイヤの説明図である。
【図10】合成画像の一例である。
【図11】探索範囲の説明図である。
【図12】都市タイプテーブルの一例を示す図である。
【図13】注記データ選択テーブルの一例を示す図である。
【図14】地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。
【図15】表示画像の合成及び表示の手順を示すフローチャートである。
【符号の説明】
【0132】
1…ナビゲーション装置、2…サーバ、3…アクセスポイント(AP)、4…通信ネットワーク
【技術分野】
【0001】
本発明は、ナビゲーションに関する。
【背景技術】
【0002】
従来、目的地までの経路を案内する機能(以下、「ナビゲーション機能」)を有する装置(以下、「ナビゲーション装置」)として、例えば、車載用のカーナビゲーションシステムや、ナビゲーション機能が搭載されたモバイル機器(例えば、携帯電話機や携帯情報端末やPNS(Portable navigation systems)等)等が知られている。
【0003】
一般に、ナビゲーション装置には、その現在位置を検出するための現在位置検出部(例えば、GPS(Global Positioning System)処理部)が備えられる。ナビゲーション装置は、現在位置検出部によって検出された現在位置が、設定された経路から外れていないかどうかを確認しながら、経路に沿ってユーザを目的地へ案内する。
【0004】
例えば、特許文献1には、ナビゲーション装置が、マルチパスの起きやすい場所に進入したと判定した場合、GPS受信機が受信した信号のうちC/N値が所定の閾値を超える信号のみを用いて測位点を演算する技術が記載されている。
【0005】
【特許文献1】特開2001−264076号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
ナビゲーション装置は、ナビゲーションを行う中で、現在位置検出部によって検出された現在位置に基づいて、マップマッチング処理やリルート判定処理等を行う。ここで、マップマッチング処理とは、地図データを用いて、検出された現在位置を経路上の位置へ補正する処理のことである。また、リルート判定処理とは、経路を再探索する処理(以下、「リルート処理」)を行う必要があるか否かを判定する処理(即ち、経路から外れたか否かを判定する処理)のことである。
【0007】
マップマッチング処理やリルート判定処理等の、現在位置に基づく処理は、ナビゲーションが行われる環境(以下、「ナビゲーション環境」)の影響を受ける。ナビゲーション環境としては、例えば、現在位置の周辺地域がどのような都市タイプ(住宅地やビル街等)であるかや、ナビゲーション装置がどのような速度で移動しているか等が挙げられる。
【0008】
例えば、周辺地域がビル街の場合は、住宅地の場合に比べてマルチパスの影響を受けやすく、検出された現在位置が実際の位置からずれやすい。従って、周辺地域がどのような都市タイプであるかによって、検出される現在位置の正確さが異なり、ナビゲーション環境が、マップマッチング処理やリルート判定処理の精度に影響を与えることになる。特に、ナビゲーション装置がモバイル機器である場合、一般に、ナビゲーション装置にはジャイロセンサが備えられていないため、マップマッチング処理やリルート判定処理は、検出された現在位置のみに基づいて行われる。従って、モバイル機器の場合、現在位置の正確さが、マップマッチング処理やリルート判定処理の精度に大きな影響を与えることになる。また、例えば、ナビゲーション装置の移動速度が遅い場合は、経路から外れたことを早めに検知して早めにリルート処理を行う必要がある。
【0009】
そこで、本発明の目的は、現在位置に基づく処理を、ナビゲーションが行われる環境に適合するように行うことである。
【課題を解決するための手段】
【0010】
本発明の一つの実施態様に従うナビゲーション装置は、目的地までの経路を案内するナビゲーション装置であって、前記目的地までの経路を示す経路データを取得する経路データ取得手段と、前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理手段と、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行うリルート判定手段と、を備える。
【0011】
本発明に係る好適な実施形態では、前記位置データ取得手段は、定期的又は不定期的に、前記ナビゲーション装置の現在位置を示す位置データを取得し、前記閾値管理手段は、前記第一の閾値に加えて、前記リルート判定に用いられる第二の閾値を都市タイプごとに管理し、前記リルート判定手段は、前記位置データ取得手段が位置データを取得するごとに、前記現在位置と前記目的地までの経路との距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定するとともに、前記第一の閾値を超えた回数をカウントし、前記カウントされた回数が前記現在位置の周辺地域の都市タイプに対応する第二の閾値を超えたか否かを判定し、前記第二の閾値を超えた場合に経路の再探索が必要と判定してもよい。
【0012】
本発明に係る好適な実施形態では、前記閾値管理手段は、前記第一の閾値に加えて、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を都市タイプごとに管理し、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、を更に備えてもよい。
【0013】
本発明に係る好適な実施形態では、表示部と、前記リルート判定において経路の再探索が必要との結果が得られた場合、前記リルート判定の結果を前記表示部に表示させるとともに、経路の再探索を行うか否かの指示をユーザから受け付けるユーザ指示受付手段と、前記ユーザ指示受付手段が受け付けた指示に基づいて、前記第一の閾値及び/又は前記第二の閾値を修正する閾値修正手段と、を更に備えてもよい。
【0014】
本発明に係る好適な実施形態では、ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、を更に備え、前記閾値管理手段は、都市タイプ及びナビゲーションモードの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記選択されているナビゲーションモードの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0015】
本発明に係る好適な実施形態では、現在通過中の道路の道路タイプを取得する道路タイプ取得手段、を更に備え、前記閾値管理手段は、都市タイプ及び道路タイプの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0016】
本発明に係る好適な実施形態では、ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、現在通過中の道路の道路タイプを取得する道路タイプ取得手段と、を更に備え、前記閾値管理手段は、都市タイプ、ナビゲーションモード及び道路タイプの組み合わせごとに、第一の閾値を管理し、前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ、前記選択されているナビゲーションモード及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行ってもよい。
【0017】
本発明に係る好適な実施形態では、計数手段を更に備え、前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定してもよい。
【0018】
本発明の一つの実施態様に従うナビゲーション装置は、目的地までの経路を案内するナビゲーション装置であって、前記目的地までの経路を示す経路データを取得する経路データ取得手段と、前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を、都市タイプごとに管理する閾値管理手段と、前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、を備える。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照しながら本発明の実施形態について詳細に説明する。
【0020】
図1は、本発明の一実施形態に係るナビゲーション装置1とサーバ2とを有するシステムの構成例を示す図である。
【0021】
ナビゲーション装置1とサーバ2とが、アクセスポイント(AP)3及び通信ネットワーク4を介して、通信可能に接続されている。ナビゲーション装置1とAP3との間の接続は、無線通信により行われる。
【0022】
サーバ2は、ナビゲーション装置1の依頼に基づいて所定の処理を行うコンピュータである。サーバ2は、例えば、目的地までの経路の探索を行う経路探索部21と、ナビゲーション装置1へ提供可能な地図データの集合である地図データDB(データベース)22とを備える。
【0023】
ナビゲーション装置1は、目的地までの経路を案内する機能(ナビゲーション機能)を有するコンピュータである。ナビゲーション装置1としては、例えば、ナビゲーション機能を搭載したモバイル機器(携帯電話機や携帯情報端末等)が挙げられるが、それに限らず、据置型の装置、例えば、車載用のカーナビゲーションシステムであってもよい。ナビゲーション装置1の機能や構成は、ナビゲーション装置1が有する所定のハードウェアと、それらを制御する所定のソフトウェア(コンピュータプログラム)によって実現することができる。ナビゲーション装置1は、例えば、入力部11と、出力部12と、ナビゲーション処理部13と、記憶部14とを備える。
【0024】
入力部11は、ユーザからの入力を受け付けるための装置である。例えば、ナビゲーション装置1は、入力部11を介して、目的地の入力や、目的地までの経路の再探索を行うか否かの指示等をユーザから受け付ける。入力部11としては、例えば、プッシュボタン、キーボード、タッチパネル或いはポインティングデバイス等が採用される。
【0025】
出力部12は、ナビゲーション機能を実現するための種々の画面を出力するための装置である。例えば、出力部12は、ナビゲーション処理部13の指示に基づいて、目的地までの経路を案内するための画面(以下、「ナビゲーション画面」)を出力する。また、出力部12は、リルート判定処理部135の指示に基づいて、リルート判定処理部135によって行われた処理の結果を出力する。出力部12としては、例えば、液晶パネル等が採用される。
【0026】
ナビゲーション処理部13は、ナビゲーション機能を実現する処理部である。ナビゲーション処理部13は、例えば、ユーザから目的地の入力を受け付けて、ナビゲーション装置1の現在位置から目的地までの経路(以下、単に「経路」という)の設定を行う。設定される経路は、ナビゲーション装置1自身或いはサーバ2によって行われる経路の探索処理により決定される。本実施形態では、経路の探索処理は、サーバ2によって行われるものとする。ナビゲーション処理部13は、ナビゲーション装置1の現在位置の周辺地図及び設定された経路を示したナビゲーション画面を出力部12に出力するとともに、音声ガイダンス等によってユーザに進路(進むべき道路や曲がるべき交差点や右折か左折か等)を通知することで、ユーザを目的地まで案内する。
【0027】
ナビゲーション処理部13は、複数種類のナビゲーションを行うことができる。本実施形態では、ナビゲーションのタイプとして、車で移動するユーザを案内する「カーナビ」と、徒歩で移動するユーザを案内する「徒歩ナビ」とを考慮するものとする。ナビゲーションのタイプは、例えば、ナビゲーションが行われる際にユーザによって指定される。ナビゲーションのタイプを示す情報は、記憶部14に記憶される。
【0028】
ナビゲーション処理部13は、例えば、現在位置検出部131と、経路探索依頼部132と、マップマッチング処理部133と、リルート判定処理部134と、都市タイプ判定部135と、閾値DB作成処理部136と、表示地点決定部119と、表示画像合成部123とを備える。
【0029】
現在位置検出部131は、ナビゲーション装置1の現在位置の検出を行うものである。現在位置検出部131によって検出された現在位置を示す位置データ(例えば、緯度及び経度)は、記憶部14に記憶される。現在位置検出部131としては、例えば、GPS(Global Positioning System)処理部を採用することができる。GPS処理部が採用される場合、現在位置検出部131には、GPSアンテナが備えられる。現在位置検出部131は、GPSアンテナが受信したGPS信号を処理することにより、現在位置を示す位置データを特定することができる。現在位置検出部131は、例えば、定期的又は不定期的に、ナビゲーション装置1の現在位置を示す位置データを取得する。
【0030】
経路探索依頼部132は、経路の探索をサーバ2に依頼するものである。経路探索依頼部132は、経路の探索をサーバ2へ依頼する際、現在位置検出部131によって取得された現在位置を示す位置データとユーザから入力された目的地を示す位置データとをサーバ2へ渡す。経路の探索依頼を受けたサーバ2の経路探索部21は、現在位置から目的地までの一以上の経路を探索してその中から適切な一つの経路を決定し、決定した経路を示すデータ(以下、「経路データ」)を経路探索依頼部132へ送信する。ここで、経路は、連続する道路の組み合わせとして表現される。従って、経路データは、例えば、道路を示すデータ(以下、「道路データ」)のリストとして表現される。また、道路は、その道路上の複数のポイント(道路を定義づけるポイントであり、以下、「道路定義ポイント」)の組み合わせとして表現される。従って、道路データは、例えば、複数の道路定義ポイントを示す位置データ(緯度及び経度)のリストとして表現される。一の道路を定義する道路定義ポイントの数や、道路定義ポイント間の距離は任意である。また、道路データには、例えば、道路定義ポイントが交差点やインターチェンジ等であることを示す付加情報が含められる。経路データを受信した経路探索依頼部132は、経路データによって示される経路の設定を行う。受信した経路データは、記憶部14に記憶される。
【0031】
マップマッチング処理部133は、記憶部14に記憶されている地図データ200を用いて、現在位置検出部131によって検出された現在位置を補正する処理(以下、「マップマッチング処理」)を行うものである。マップマッチング処理は、現在位置検出部131によって現在位置が検出されるごとに行われる。マップマッチング処理の詳細については、後述する。
【0032】
リルート判定処理部134は、経路を再探索する処理(リルート処理)を行う必要があるか否かを判定する処理(以下、「リルート判定処理」)を行うものである。リルート判定処理も、マップマッチング処理と同様、現在位置検出部131によって現在位置が検出されるごとに行われる。リルート判定処理の詳細については、後述する。
【0033】
都市タイプ判定部135は、現在位置の周辺地域の都市タイプを判定する処理(以下、「都市タイプ判定処理」)を行うものである。都市タイプ判定処理は、現在位置の周辺地域を示す地図データに基づいて行われる。都市タイプ判定処理の詳細については、後述する。本実施形態では、都市タイプとして、単位エリアの建物レベル(例えば、単位エリアに存在する高い建物の数に基づいて決定されたレベル)が低い順に、住宅地、標準、ビル街の三種類を考慮するものとする。
【0034】
閾値DB修正処理部136は、閾値DB16に登録されている閾値の修正を行うものである。例えば、閾値DB修正処理部136は、マップマッチング処理やリルート判定処理の結果に対するユーザの指示の内容に基づいて、閾値DB16に登録されている閾値を修正することができる。
【0035】
表示地点決定部119及び表示画像合成部123の詳細については、後述する。
【0036】
記憶部14は、いわゆる記憶装置である。記憶部14には、例えば、サーバ2から取得した地図データ200や、閾値DB16や、現在位置を示す位置データや、設定された経路を示す経路データ等が記憶される。記憶部14に記憶されている地図データ200に基づく地図は、ナビゲーション画面に表示される。また、地図データ200は、マップマッチング処理及びリルート判定処理に利用される。ナビゲーション装置1は、例えば、予め対象範囲の全ての地図データ200をサーバ2から取得しておき、それらを記憶部14に記憶しておくことができる。また、ナビゲーション装置1は、ナビゲーション機能が利用される中で必要となった地図データ200を逐次サーバ2から取得して、それらを記憶部14に記憶することもできる。
【0037】
また、記憶部14には、都市タイプテーブル131と、注記データ選択テーブル133とが記憶される。都市タイプテーブル131及び注記データ選択テーブル133は、都市タイプ判定処理に利用されるテーブルである。都市タイプテーブル131及び注記データ選択テーブル133の詳細については、後述する。
【0038】
図2は、マップマッチング処理を説明する図である。
【0039】
図2には、現在位置検出部131によって検出された現在位置6とその周辺地図5とが示されている。矢印7が通過している道路70が、経路(経路の一部)である。以下、説明の便宜上、経路7と表現する。図2には、複数の現在位置6(マルで示された位置)が示されているが、参照番号のハイフン以下の数値が最も小さいもの(現在位置6−0)が直近に検出された現在位置6であり、ハイフン以下の数値が大きくなるにつれて、より過去に検出されたものとなっている。
【0040】
マップマッチング処理部133は、現在位置6が検出されるごとに、その検出された現在位置6と経路7との距離(以下、「現在位置−経路間距離」)8を計算する。そして、マップマッチング処理部133は、計算された現在位置−経路間距離8が所定の閾値(以下、「マップマッチング対象距離」)166以下であるか否かを判定する。現在位置−経路間距離8がマップマッチング対象距離166以下である場合は、マップマッチング処理部133は、現在位置6を、現在位置6に最も近い経路7上の位置(ひし形で示された位置)へ補正する。即ち、マップマッチング処理部133は、現在位置6を示す位置データを、現在位置検出部131によって検出された現在位置(補正前の現在位置)6を示す位置データから、補正前の現在位置6に最も近い経路7上の位置(補正後の現在位置)6’を示す位置データへ変更する。一方、現在位置−経路間距離8がマップマッチング対象距離166を超えている場合は、マップマッチング処理部133は、現在位置6の補正を行わない。即ち、この場合、現在位置6は、現在位置検出部131によって検出された現在位置6のままとなる。図2の例では、現在位置6−4〜6−8については、現在位置−経路間距離8がマップマッチング対象距離166以下となっている。従って、現在位置6−4〜6−8のそれぞれは、経路7上の位置6−4’〜6−8’へ補正される。一方、現在位置6−0〜6−3については、現在位置−経路間距離8がマップマッチング対象距離166を超えている。従って、現在位置6−0〜6−3のそれぞれは、補正されない。
【0041】
現在位置−経路間距離8は、現在位置6を示す位置データと経路7を示す経路データとに基づいて計算される。上述したように、経路データは、道路データのリストとして表現され、道路データは、道路定義ポイントを示す位置データのリストとして表現される。例えば、A点及びB点が、経路7を構成する道路70の道路定義ポイントであるとすると、A点とB点とを結ぶ直線が、A点及びB点間の経路を近似した線(以下、「経路近似線」)となる。従って、マップマッチング処理部133は、まず、A点を示す位置データ及びB点を示す位置データに基づいてA点とB点とを結ぶ直線(経路近似線)を計算する。そして、マップマッチング処理部133は、計算された経路近似線及び現在位置6を示す位置データに基づいて、計算された経路近似線と現在位置6との距離(即ち、現在位置−経路間距離8)を計算することができる。
【0042】
また、補正後の現在位置6’は、補正前の現在位置6に最も近い経路7上の位置とされる。従って、例えば、マップマッチング処理部133は、経路近似線及び補正前の現在位置6を示す位置データに基づいて、補正前の現在位置6と補正後の現在位置6’とを結ぶ直線が経路近似線と直交するように、補正後の現在位置6’を決定することができる。
【0043】
マップマッチング処理後の現在位置(補正された場合は補正後の現在位置6’、補正されない場合は現在位置検出部によって検出された現在位置6であり、以下、「マップマッチング処理後位置60」という)は、周辺地図5とともにナビゲーション画面に表示される。図3は、現在位置(マップマッチング処理後位置60)が表示されたナビゲーション画面の例を示している。即ち、現在位置−経路間距離8がマップマッチング対象距離166以下である現在位置6については、経路7上に表示され、現在位置−経路間距離8がマップマッチング対象距離166を超えている現在位置6については、現在位置検出部131によって検出された位置のまま表示される。尚、現在位置−経路間距離8がマップマッチング対象距離166を超えている現在位置6については、経路7とは異なる、現在位置6に最も近い道路上の位置に補正されて表示されてもよい。
【0044】
図4は、リルート判定処理を説明する図である。
【0045】
図4には、マップマッチング処理後位置60とその周辺地図5とが示されている。図2と同様に、矢印7が通過している道路70が、経路(経路の一部)である。また、マップマッチング処理後位置60のうち、参照番号のハイフン以下の数値が最も小さいもの(マップマッチング処理後位置60−0)が直近に検出された現在位置6であり、ハイフン以下の数値が大きくなるにつれて、より過去に検出されたものとなっている。
【0046】
リルート判定処理部134は、現在位置6が検出されてマップマッチング処理が行われた後、マップマッチング処理後位置60と経路7との距離(以下、「マップマッチング処理後位置−経路間距離」)を計算する。ここで、マップマッチング処理後位置60のうちマップマッチング処理において補正されたものについては、マップマッチング処理後位置−経路間距離は、“0”となる。マップマッチング処理後位置60は、経路7上にあるからである。一方、マップマッチング処理後位置60のうちマップマッチング処理において補正されていないものについては、マップマッチング処理後位置−経路間距離は、マップマッチング処理において計算された現在位置−経路間距離8となる。現在位置−経路間距離8は、マップマッチング処理において計算されたものがそのまま利用されてもよいし、リルート判定処理において改めて計算されてもよい。その後、リルート判定処理部134は、計算されたマップマッチング処理後位置−経路間距離が所定の閾値(以下、「リルート対象距離」)169を超えているか否かを判定する。そして、リルート判定処理部134は、マップマッチング処理後位置−経路間距離がリルート対象距離169を超えた回数をカウントする。そして、リルート判定処理部134は、カウントした回数が所定の閾値(以下、「リルート対象回数」)168を超えているか否かを判定する。カウントした回数がリルート対象回数168を超えている場合は、リルート判定処理部134は、リルート処理が必要と判定する。
【0047】
尚、本実施形態では、マップマッチング処理が行われた後の現在位置(即ち、マップマッチング処理後位置60)についてリルート判定処理が行われる例を示したが、必ずしもこれに限定されるものではない。例えば、マップマッチング処理が行われる前の現在位置(即ち、現在位置検出部131によって検出された現在位置6)についてリルート判定処理が行われてもよい。
【0048】
上述したように、マップマッチング処理やリルート判定処理では、幾つかの閾値(本実施形態では、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169)が利用される。本実施形態に係るナビゲーション装置1は、マップマッチング処理やリルート判定処理において、ナビゲーションが行われる環境(ナビゲーション環境)の違いに応じて異なる値の閾値(ナビゲーション環境に適合する値の閾値)を利用する。ナビゲーション環境としては様々なものが考えられるが、本実施形態では、ナビゲーション環境として、ナビゲーションのタイプが何であるか(“カーナビ”であるか或いは“徒歩ナビ”であるか)と、現在位置6の周辺地域の都市タイプが何であるか(“住宅地”であるか“標準”であるか或いは“ビル街”であるか)と、通過中の道路のタイプが何であるか(“一般道”であるか或いは“高速道”であるか)とを考慮するものとする。
【0049】
例えば、現在位置6の周辺地域の都市タイプが“ビル街”である場合は、マルチパスの影響を受けやすいため、現在位置検出部131によって検出される位置が実際の位置からずれる可能性が高い。そのため、リルート判定処理に関しては、都市タイプが“ビル街”の場合にリルート対象距離169を小さく設定しすぎたりリルート対象回数168を小さく設定しすぎたりすると、実際は経路7から外れていないにもかかわらずリルート処理が行われてしまうという可能性が高くなる。そこで、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、リルート対象距離169及び/又はリルート対象回数168をより大きく設定して、よりリルート処理が行われにくくすることができる(リルート処理が必要との判定が、より得られにくいようにすることができる)。これにより、実際は経路7から外れていない場合の無駄なリルート処理を行わないようにすることができる。また、マップマッチング処理に関しては、都市タイプが“ビル街”の場合にマップマッチング対象距離166を小さく設定しすぎると、実際の位置が経路7からそれ程離れていないにもかかわらず経路7上の位置に補正されないという可能性が高くなる。そこで、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、マップマッチング対象距離166をより大きく設定して、より現在位置6の補正が行われやすくすることができる。
【0050】
また、例えば、ナビゲーション装置1の移動速度が遅い場合は、経路7から外れたことを早めに検知して早めにリルート処理を行う必要がある。従って、ナビゲーションのタイプが“徒歩ナビ”の場合は、“カーナビ”の場合よりもリルート対象距離169及び/又はリルート対象回数168を小さく設定して、よりリルート処理が行われやすくすることができる(リルート処理が必要との判定が、より得られやすいようにすることができる)。また、道路タイプが“一般道”の場合は、“高速道”の場合よりもリルート対象距離169及び/又はリルート対象回数168を小さく設定して、よりリルート処理が行われやすくすることもできる。
【0051】
このように、本実施形態に係るナビゲーション装置1は、ナビゲーション環境の違いに応じて異なる値の閾値を利用するため、ナビゲーション環境に適合した適切なマップマッチング処理及びリルート判定処理を行うことができる。
【0052】
図5は、閾値DB16の一例を示す図である。
【0053】
閾値DB16は、マップマッチング処理及びリルート判定処理に用いられる閾値を管理するDBである。閾値DB16は、一以上の閾値データ160の集合である。閾値データ160には、例えば、ナビゲーション環境の環境タイプ161ごとに、マップマッチング処理に利用される閾値(以下、「マップマッチング閾値」)165とリルート判定処理に利用される閾値(以下、「リルート閾値」)167とが含まれる。即ち、閾値データ160は、対応する環境タイプ161の下で利用されるマップマッチング閾値165とリルート閾値167とを定義している。環境タイプ161には、例えば、ナビタイプ162と、都市タイプ163と、道路タイプ164とが含まれる。マップマッチング閾値165には、例えば、マップマッチング対象距離166が含まれる。リルート閾値167には、例えば、リルート対象回数168と、リルート対象距離169とが含まれる。
【0054】
ナビタイプ162は、ナビゲーションのタイプを示す情報である。例えば、ナビタイプ162は、ナビゲーションのタイプが“カーナビ”である場合は“カーナビ”とされ、ナビゲーションのタイプが“徒歩ナビ”である場合は“徒歩ナビ”とされる。
【0055】
都市タイプ163は、都市タイプを示す情報である。例えば、都市タイプ163は、都市タイプが“住宅地”である場合は“住宅地”とされ、都市タイプが“標準”である場合は“標準”とされ、都市タイプが“ビル街”である場合は“ビル街”とされる。
【0056】
道路タイプ164は、道路のタイプを示す情報である。例えば、道路タイプ164は、道路のタイプが一般道である場合は“一般道”とされ、道路のタイプが高速道である場合は“高速道”とされる。
【0057】
図5の例では、マルチパスの影響を受けやすい都市タイプほど(即ち、“住宅地”→“標準”→“ビル街”の順に)、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169が、より大きな値とされている(“標準”及び“ビル街”のリルート対象回数168は同じ値である)。また、ナビゲーション装置1の移動速度が遅いものほど(即ち、“カーナビ”→“徒歩ナビ”の順に、或いは“高速道”→“一般道”の順に)、マップマッチング対象距離166、リルート対象回数168及びリルート対象距離169が、より小さな値とされている(“高速道”及び“一般道”のリルート対象回数168は同じ値である)。
【0058】
図6は、マップマッチング処理のフローチャートである。
【0059】
まず、現在位置検出部131が、ナビゲーション装置1の現在位置6を検出する(S101)。現在位置検出部131は、検出した現在位置6を示す位置データ(緯度及び経度)を記憶部14に記憶する。
【0060】
次に、マップマッチング処理部133は、現在位置6の周辺地域の都市タイプを都市タイプ判定部135に取得させる(S102)。
【0061】
次に、マップマッチング処理部133は、現在行われているナビゲーションのタイプと現在通過中の道路のタイプとを取得する(S103)。具体的には、マップマッチング処理部133は、記憶部14に記憶されているナビゲーションのタイプを示す情報を参照することで、現在行われているナビゲーションのタイプを取得することができる。また、マップマッチング処理部133は、次のようにして現在通過中の道路のタイプを取得することができる。即ち、ナビゲーション装置1は、ナビゲーションを行う中で、ナビゲーション装置1が、経路を構成する道路のどの道路定義ポイントまで通過したかを記録している。従って、ナビゲーション装置1は、直近に通過した道路定義ポイントを調べることにより、経路データを基に、現在通過中の道路を特定することができる。そして、経路データには、その経路を構成する道路ごとに、道路のタイプを示す情報が含まれている。従って、ナビゲーション装置1は、特定された道路(即ち、現在通過中の道路)のタイプを、経路データから取得することができる。尚、地図データにも、地図データに含まれる道路ごとに、道路のタイプを示す情報が含まれている。従って、ナビゲーション装置1は、特定された道路のタイプを、地図データから取得することもできる。
【0062】
次に、マップマッチング処理部133は、S102及びS103で取得したナビゲーションのタイプ、都市タイプ及び道路のタイプに対応するマップマッチング閾値165(マップマッチング対象距離166)を閾値DB16から取得する(S104)。
【0063】
その後、マップマッチング処理部133は、S101で検出された現在位置6を示す位置データと記憶部14に記憶されている経路7を示す経路データとに基づいて、現在位置−経路間距離8を計算する(S105)。
【0064】
その後、マップマッチング処理部133は、S105で計算された現在位置−経路間距離8が、S104で取得したマップマッチング対象距離166以下であるか否かを判定する(S106)。
【0065】
現在位置−経路間距離8がマップマッチング対象距離166以下である場合は(S106:YES)、マップマッチング処理部133は、現在位置6の補正を行う(S107)。具体的には、マップマッチング処理部133は、ナビゲーション装置1の現在位置6を、現在位置検出部131によって取得された現在位置(補正前の現在位置)6から、補正前の現在位置に最も近い経路上の位置(補正後の現在位置)6’へ補正する。
【0066】
一方、現在位置−経路間距離8がマップマッチング対象距離166を超えている場合は(S106:NO)、マップマッチング処理部133は、現在位置6の補正を行わない。
【0067】
ナビゲーションが終了するまで、S101からS107までの処理が繰り返して行われる(S108)。
【0068】
図7は、リルート判定処理のフローチャートである。
【0069】
ナビゲーションが開始される前に、リルート判定処理に利用されるカウンタ(以下、「リルート判定カウンタ」)が初期化される。具体的には、リルート判定カウンタが“0”に設定される。
【0070】
まず、現在位置検出部131が、ナビゲーション装置1の現在位置6を検出する(S201)。現在位置検出部131は、検出した現在位置6を示す位置データ(緯度及び経度)を記憶部14に記憶する。
【0071】
次に、リルート判定処理部134は、現在位置6の周辺地域の都市タイプを都市タイプ判定部135に取得させる(S202)。
【0072】
次に、マップマッチング処理部133は、現在行われているナビゲーションのタイプと現在通過中の道路のタイプとを取得する(S203)。この処理は、図6におけるS103と同様にして行われる。
【0073】
次に、リルート判定処理部134は、S202及びS203で取得したナビゲーションのタイプ、都市タイプ及び道路のタイプに対応するリルート閾値167(リルート対象回数168及びリルート対象距離169)を閾値DB16から取得する(S204)。
【0074】
その後、リルート判定処理部134は、S201で検出された現在位置6を示す位置データと記憶部14に記憶されている経路7とを示す経路データとに基づいて、マップマッチング処理後位置−経路間距離を計算する(S205)。上述したように、マップマッチング処理後位置60のうちマップマッチング処理において補正されたものについては、マップマッチング処理後位置−経路間距離は、“0”となる。また、マップマッチング処理後位置60のうちマップマッチング処理において補正されていないものについては、マップマッチング処理後位置−経路間距離は、マップマッチング処理において計算された現在位置−経路間距離8となる。従って、S205においてマップマッチング処理後位置−経路間距離を計算せずに、図6におけるS105で計算された現在位置−経路間距離8が利用されてもよい。
【0075】
その後、リルート判定処理部134は、S205で計算されたマップマッチング処理後位置−経路間距離が、S204で取得したリルート対象距離169を超えているか否かを判定する(S206)。
【0076】
マップマッチング処理後位置−経路間距離がリルート対象距離169を超えている場合は(S206:YES)、リルート判定処理部134は、リルート判定カウンタをインクリメントする(S207)。
【0077】
その後、リルート判定処理部134は、リルート判定カウンタの値がリルート対象回数168を超えているか否かを判定する(S208)。
【0078】
リルート判定カウンタの値がリルート対象回数168を超えている場合は(S208:YES)、リルート判定処理部134は、リルート処理が必要と判定する(S209)。リルート処理が必要と判定されると、リルート判定処理部134は、リルート処理が必要と判定された旨を、出力部12を介してユーザに通知する。ユーザは、この通知に対して、リルート処理を行うことの指示か或いはリルート処理を行わないことの指示を入力部11に入力することができる。リルート処理を行うことの指示を受け付けた場合、リルート判定処理部134は、リルート処理の開始を経路探索依頼部132へ指示する。指示を受けた経路探索依頼部132は、経路の探索をサーバ2へ依頼する。その後、新たに決定された経路を示す経路データをサーバ2から受信したナビゲーション装置1は、受信した経路データによって示される経路の設定を行い、ナビゲーションを再開する。一方、リルート処理を行わないことの指示を受け付けた場合、リルート処理は行われずにナビゲーションが継続して行われる。この場合、例えば、閾値DB修正処理部136は、閾値DB16におけるリルート閾値167を修正することができる。具体的には、例えば、図5の例であれば、環境タイプ161として、ナビゲーションのタイプが“カーナビ”、都市タイプが“住宅地”且つ道路のタイプが“一般道”であった場合、リルート対象回数168として“2”が、リルート対象距離169として“100”が、それぞれ利用される。これらの閾値が利用されてリルート処理が必要と判定された際に、リルート処理を行わないことの指示を受け付けた場合、閾値DB修正処理部136は、例えば、リルート対象回数168を“2”よりも大きい値へ修正し、及び/又は、リルート対象距離169を“100”よりも大きい値へ修正することができる。これにより、リルート処理が必要との判定が、これまでよりも得られにくいようにすることができる。
【0079】
ナビゲーションが終了するまで、S201からS208までの処理が繰り返して行われる(S210)。
【0080】
以下、都市タイプ判定処理の詳細を説明する。
【0081】
図8は、地図データ200のデータ構造を示す。
【0082】
同図に示すように、地図データ200は、複数のレイヤ210、210,・・・から構成されている。レイヤ210、210,・・・は、例えば、図9に示すように、地図画像の縮尺に応じて階層化されている。それぞれのレイヤ210のデータは、地図画像を所定の大きさに区切ったメッシュ220単位で構成されている。ここでは、最も細かいメッシュ220を有するレイヤ、つまり詳細な地図画像を有するレイヤをレイヤ1とし、メッシュサイズが粗くなるにつれて、レイヤ2,レイヤ3となり、最も粗いメッシュを有するレイヤ6までの6階層としても良い。
【0083】
各メッシュ220は、それぞれのメッシュの地図画像データ221と、各メッシュの地図画像上の注記データ223とを有する。
【0084】
地図画像データ221は、複数のポリゴンデータ及びポリラインデータを含む。各ポリゴンデータ及びポリラインデータは、それぞれの特性を示す属性情報及び位置情報を有する。
【0085】
注記データ223は、複数のエンティティ225,225,・・・によって構成されている。各エンティティ225,225,・・・は、それぞれ一つの注記表示(スポット表示)を行うためのデータである。図10は、出力部12に表示される表示画面の一例である。注記表示とは、例えば、図10に示すような地図画像上に表示された種々の文字、記号、図形、マークなどをいう。従って、各エンティティ225,225,・・・には、これらの文字、記号、図形、マークなどのデータが含まれていても良い。また、各エンティティ225,225,・・・には、各種名称(例えば、地名(住所)、地域名、河川名、及び各種ランドマーク(建築物、構造物)の名称など)のテキストデータや、店舗のマークなどの画像データが含まれていても良い。さらに、各エンティティ225,225,・・・には、各注記表示の属性を示すデータも含まれている。属性とは、例えば、各注記表示が示しているものの種別(住所、交差点、コンビニ、ガソリンスタンド、駅、等)や、各注記表示が配置される位置の情報が含まれる。
【0086】
表示地点決定部119は、入力部11または現在位置検出部131の出力に基づいて、出力部12に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)を決定する。例えば、入力部11から、出力部12に表示させるべき位置情報(例えば、緯度および経度、住所、ランドマークの名称など)の通知を受けたとき、または、出力部12に既に表示されている地図をスクロールさせるための入力を受けたとき、あるいは、現在位置検出部131から現在位置の位置情報の通知を受けたときに、それらに基づいて、表示地点決定部119は、出力部12に表示する表示地点Cを決定する。ここで、表示地点Cとは、例えば、出力部12の特定の位置(例えば中心)に表示される地点(図10参照)の緯度及び経度でよい。
【0087】
都市タイプ判定部135は、注記表示計数処理と都市タイプ判定処理とを行って、表示地点決定部119が決定した表示地点の都市タイプを判定する。ここで、都市タイプとは、地図における注記表示の混雑度合い、つまり、単位面積あたりの注記表示データ223のエンティティ225の個数の多さ(密度)を示すものである。これは、開発(都市化)が進んだ地域ほど地図上の注記表示が密であり、つまり単位面積あたりの注記表示データ223のエンティティ225の個数が多いという特徴があるからである。また、これとは反対に、山間部などの開発が進んでいない地域では注記表示が疎であり、つまり単位面積あたり注記表示データ223のエンティティ225の個数が少ないという特徴があるためである。従って、この注記表示の混雑度合いは、実質的には都市化の度合いを示すものとして、本実施形態では都市タイプ判定を行っている。
【0088】
次に、図11を参照して、都市タイプ判定部135が行う注記表示計数処理、及び都市タイプ判定処理について説明する。図11は、予め定められた基準レイヤのメッシュに分割された地図画像を示す。基準レイヤは、複数のレイヤのうちのいずれかに予め定められていてもよい。
【0089】
注記表示計数処理では、例えば、以下のような処理が行われる。すなわち、都市タイプ判定部135は、表示地点決定部119が定めた表示地点Cを取得すると、図11に示すように、基準レイヤにおける表示地点C及びその周辺領域を含む1以上のメッシュを探索範囲320として特定する。ここで、探索範囲320は、例えば、図11に示すように、表示地点Cを含むメッシュ310と、そのメッシュ310に接する全メッシュ(メッシュ310の周辺の全メッシュ)を探索範囲320としてもよい。あるいは、探索範囲320は、メッシュ310のみでも良いし、メッシュ310と上下左右に隣り合う4つのメッシュを含む5メッシュで構成しても良い。
【0090】
都市タイプ判定部135は、探索範囲320に属する各メッシュ220の注記データ223を、記憶部14から取得する。そして、都市タイプ判定部135は、メッシュごとに、それぞれのメッシュ220の注記データ223内のエンティティ225の数を計数する。さらに、都市タイプ判定部135は、探索範囲320全体のエンティティ数の総計を求める。探索範囲320全体のエンティティ数の総計を求める際、都市タイプ判定部135は、各メッシュ別のエンティティ数に所定の重み係数をかけてから総計を算出しても良い。例えば、表示地点Cが属するメッシュ310の重み係数を周辺よりも大きくしたり、メッシュ310と上下または左右方向に隣り合っているメッシュの重み係数を、斜め方向に隣り合っているメッシュの重み係数より大きくしたりしても良い。都市タイプ判定部135は、ここで算出したエンティティ数の総計を、探索範囲320のメッシュ数で割って、探索範囲320のメッシュあたりのエンティティ数(平均エンティティ数)を算出する。
【0091】
都市タイプ判定処理では、例えば以下のような処理が行われる。すなわち、都市タイプ判定部135は、上述の注記表示計数処理で算出した平均エンティティ数に基づいて、都市タイプテーブル131を参照して、都市タイプを判定する。
【0092】
なお、注記表示のエンティティ数は、レイヤによってその数が異なるので、上記の処理は基準レイヤを定めて行うことが好ましい。また、基準レイヤは、中程度のメッシュの細かさのレイヤ(例えばレイヤ3)としても良い。これは、ある程度広い範囲で判定を行った方が、都市としての特性を把握しやすいからである。
【0093】
図12は、都市タイプテーブル131の一例を示す。すなわち、都市タイプテーブル131は、平均エンティティ数1311と都市タイプ1313とを対応付けて記憶している。
【0094】
なお、上述した注記表示計数処理及び都市タイプ判定処理では、表示地点決定部119が定めた表示地点Cの都市タイプを判定しているが、都市タイプ判定部135は、これ以外の地点の都市タイプを判定することもできる。すなわち、都市タイプ判定部135は、指定された任意の地点の都市タイプを、上述と同様の手順で判定することができる。
【0095】
表示地点決定部119によって表示地点Cが決定されるたびに、都市タイプ判定部135が都市タイプの判定を行うようにしてもよい。つまり、出力部12に表示させる地図画像が切り替わるたびに、その都度、都市タイプ判定部135が表示地点Cの都市タイプ判定を行っても良い。あるいは、これとは反対に、出力部12に表示させる地図画像をスクロールするようなときであって、そのスクロール幅が小さいときなどは、都市タイプ判定部135は、表示地点Cの都市タイプ判定を毎回行わなくても良い。つまり、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点との変位量が所定以下であるときは、都市タイプ判定部135による都市タイプ判定を省略して、表示画像合成部123は、過去の都市タイプ判定結果を利用しても良い。あるいは、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点とが、あるレイヤ(例えば、最も詳細なメッシュのレイヤ1)において同一メッシュに含まれているときは、都市タイプ判定を省略しても良い。
【0096】
表示画像合成部123は、注記表示の選択処理を行う注記表示選択処理と、画像処理とを行う。そして、画像処理においては、注記表示選択手段によって選択された注記表示を含む表示画像を合成し、出力部12に表示させる。
【0097】
表示画像合成部123は、注記表示選択処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、出力部12に表示させる地図のレイヤ(表示レイヤ)、及び表示させる範囲(表示範囲)が定まると、それに対応する地図画像データ221を記憶部14から取得する。表示範囲は、例えば、表示レイヤ、表示時点A及び表示させる地図の縮尺により定まる。従って、表示画像合成部123は、例えば、出力部12に表示させる表示レイヤ、表示時点A及び表示させる地図の縮尺に応じて、地図画像データ221を記憶部14から取得しても良い。なお、出力部12に表示させる表示レイヤ及び地図の縮尺は、ユーザの入力、またはナビゲーション装置1内の図示しない他のアプリケーションからの指示などに応じて定めてもよい。
【0098】
表示画像合成部123は、さらに、上述の表示範囲に含まれている注記データ223のエンティティ225を記憶部14から取得して、都市タイプ(あるいは都市タイプ判定部135が算出した平均エンティティ数)に応じて、表示範囲に表示させる注記表示を選択する。例えば、表示画像合成部123は、表示地点C、表示レイヤ及び縮尺に基づいて、表示範囲に含まれる注記表示のエンティティ225を取得する。そして、表示画像合成部123は、都市タイプ判定部135で判定された都市タイプ、及び注記データ選択テーブル133に従って、エンティティ225を選択する。
【0099】
注記データ選択テーブル133は、レイヤ及び都市タイプに応じて、表示画像に含める注記表示の属性を定めている。
【0100】
図13は、注記データ選択テーブル133の一例を示す。同図に示す例では、レイヤごとにテーブルが構成されている。各テーブルでは、属性別、都市タイプ別に、注記表示を表示する縮尺の範囲が規定されている。例えば、同図の例では、都市タイプが「大都市ターミナル周辺」の場合、「住所名」は縮尺が「120」以下のときに表示され、「ガソリンスタンドマーク」は縮尺が「100」以下のときに表示され、「拡大住所名」は縮尺が「80」以下のときに表示され、「コンビニ表示」は縮尺が「60」以下のときに表示される。
【0101】
なお、図13の例で示す縮尺とはレイヤ別の表示縮尺である。この縮尺は、数値が大きいほど地図は拡大されていて、数値が小さいほど地図は縮小されている。
【0102】
表示画像合成部123は、画像処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、地図画像の上に注記表示を重ねて、出力部12に表示させる合成画像(図10参照)を生成する。そして、表示画像合成部123は、上記のようにして合成した画像を出力部12に表示させる。
【0103】
なお、表示地点Cが切り替わるごとに都市タイプ判定部135が都市タイプ判定を行っているとき、都市タイプが切り替わる境界付近では、都市タイプ判定部135の判定結果が、不安定にぶれることがある。そこで、このぶれによる影響を受けないようにするために、表示画像合成部123は、例えば以下のようにしても良い。すなわち、ある都市タイプから別の都市タイプへ切り替わるとき、表示画像合成部123が注記データ選択処理において採用する都市タイプは、例えば以下のようにして切り替えてもよい。すなわち、都市タイプ判定部135による判定結果が、連続して第1の都市タイプ(例えば「大都市ターミナル周辺」)である状態から、第2の都市タイプ(例えば「市街地」)へ切り替わったとき、表示画像合成部123は、所定回数以上連続して第2の都市タイプが検出されるまでは、第1の都市タイプのままで処理を行う。そして、所定回数以上連続して第2の都市タイプが検出されると、表示画像合成部123は、それ以降の処理を第2の都市タイプを用いて処理を行う。これにより、都市タイプが切り替わる境界付近において、都市タイプ判定部135による判定結果がぶれることがあっても、その影響を受けず、注記表示の表示レベルの切り替えを安定的に行うことができる。
【0104】
次に、上述した構成を備えるナビゲーション装置1における処理手順について、図14及び図15を用いて説明する。
【0105】
図14は、地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。なお、以下の処理を行う前に、予めナビゲーション処理部13が必要な地図データをサーバ2から取得して、記憶部14に格納しておく。
【0106】
まず、表示地点決定部119が表示地点Cを決定する(S11)。
【0107】
都市タイプ判定部135は、表示地点決定部119が定めた表示地点Cを取得すると、所定の基準レイヤにおいて、この表示地点C及びその周辺領域を含む探索範囲のメッシュ220を定める。そして、記憶部14を参照し、基準レイヤの探索範囲内のメッシュ220から、注記データ223を取得する(S13)。
【0108】
都市タイプ判定部135は、ステップS13で取得した注記データ223のエンティティ225の数の総計を計数する(S15)。このとき、都市タイプ判定部135は、上述したような重み係数による重み付けを行っても良い。
【0109】
都市タイプ判定部135は、ステップS15で計数したエンティティ数の総計から、平均エンティティ数を算出する(S17)。
【0110】
都市タイプ判定部135は、都市タイプテーブル131を参照して、ステップS17で算出した平均エンティティ数に対応する都市タイプを特定する(S19)。
【0111】
上述した処理により、地図データに基づいて、表示地点の都市タイプを判定することができる。
【0112】
図15は、表示画像の合成及び表示の手順を示すフローチャートである。
【0113】
表示レイヤ、表示地点C及び表示縮尺が特定されると、表示画像合成部123は出力部12に表示させる表示範囲を決定する(S21)。
【0114】
表示画像合成部123は、都市タイプ判定部135が定めた都市タイプを取得する(S23)。
【0115】
表示画像合成部123は、注記データ選択テーブル133を参照して、都市タイプ、表示レイヤ及び表示縮尺から、表示画面に含めて表示させる注記表示の属性を特定する(S25)。
【0116】
表示画像合成部123は、表示レイヤの表示範囲の地図画像データ221及び注記データ223を、記憶部14から取得する(S27)。
【0117】
表示画像合成部123は、ステップS27で取得した注記データ223のうち、ステップS25で特定された注記表示の属性のエンティティ225を抽出する。そして、ステップS27で取得した地図画像データ221に基づく地図画像に、ここで抽出したエンティティに基づく注記表示を重ねた表示画像を合成する(S29)。
【0118】
そして、表示画像合成部123は、その表示画像を出力部12に表示させる(S31)。
【0119】
これにより、本実施形態によれば、地図画像が表示される地域の特性に応じた注記表示を行うことができる。
【0120】
なお、この第二の実施形態を抽象的に表現するならば、例えば下記のように表現できる。
【0121】
[表現1]
表示部を備えた地図表示装置であって、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
前記表示部に表示される表示地点を決定する表示地点決定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記表示地点決定手段によって決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択する注記表示選択手段と、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる画像処理手段と、を備える地図表示装置。
【0122】
[表現2]
前記計数手段の計数結果に基づいて、前記表示地点の都市タイプを判定する都市タイプ判定手段をさらに備え、
前記注記表示データは、各注記表示の属性を示す属性データを含み、
前記注記表示選択手段は、前記都市タイプ判定手段によって判定された都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定し、前記表示レイヤの前記表示範囲内の注記表示データから、前記特定された属性の注記表示データを選択することを特徴とする表現1記載の地図表示装置。
【0123】
[表現3]
前記表示地点決定手段によって表示地点が決定されるたびに、前記都市タイプ判定手段が都市タイプの判定を行い、前記注記表示選択手段が前記都市タイプ判定手段の判定結果に従って前記注記表示データの属性の特定を行うように構成されているときに、
前記都市タイプ判定手段による判定結果が第1の都市タイプから第2の都市タイプに切り替わったときは、前記注記表示選択手段は、所定回数以上連続して第2の都市タイプが検出される前は前記第1の都市タイプに従って前記注記表示データの属性の特定を行い、前記所定回数以上連続して第2の都市タイプが検出された後は前記第2の都市タイプに従って前記注記表示データの属性の特定を行うことを特徴とする表現2に記載の地図表示装置。
【0124】
[表現4]
前記表示地点決定手段によって決定した最新の表示地点と、前記最新の表示地点よりも以前に決定された表示地点との変位量が所定以下のときは、前記都市タイプ判定手段は都市タイプの判定を行わず、
前記注記表示選択手段は、前記以前に決定された表示地点に対応する都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定することを特徴とする表現2記載の地図表示装置。
【0125】
[表現5]
前記計数手段は、
前記探索範囲に、前記表示地点を含む第1のメッシュ及び前記第1のメッシュの周辺の一以上の第2のメッシュを含め、
前記第2のメッシュの内の注記表示個数よりも、前記第1のメッシュ内の注記表示個数に重み付けを行って前記注記表示の個数を計数することを特徴とする表現1〜4のいずれかに記載の地図表示装置。
【0126】
[表現6]
前記注記表示データは、前記地図画像上の複数の注記表示にそれぞれ対応した、複数のデータエンティティによって構成されていて、
前記計数手段が行う前記注記表示の個数の計数は、前記データエンティティの個数の計数であることを特徴とする表現1〜5のいずれかに記載の地図表示装置。
【0127】
[表現7]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、を備える地図表示方法。
【0128】
[表現8]
地図を表示するためのコンピュータプログラムであって、
コンピュータに実行されると、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、が行われるコンピュータプログラム。
【0129】
[表現9]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
都市化判定基準地点を指定する指定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記都市化判定基準地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記計数手段の計数結果に基づいて、前記都市化判定基準地点の都市タイプを判定する都市タイプ判定手段とを備える、地図データから都市タイプを判定する装置。
【0130】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。本発明は、その要旨を逸脱することなく、その他の様々な態様でも実施することができる。
【図面の簡単な説明】
【0131】
【図1】本発明の一実施形態に係るナビゲーション装置とサーバとを有するシステムの構成例を示す図である。
【図2】マップマッチング処理を説明する図である。
【図3】現在位置が表示されたナビゲーション画面の一例を示す図である。
【図4】リルート判定処理を説明する図である。
【図5】閾値DBの一例を示す図である。
【図6】マップマッチング処理のフローチャートである。
【図7】リルート判定処理のフローチャートである。
【図8】地図データのデータ構造である。
【図9】レイヤの説明図である。
【図10】合成画像の一例である。
【図11】探索範囲の説明図である。
【図12】都市タイプテーブルの一例を示す図である。
【図13】注記データ選択テーブルの一例を示す図である。
【図14】地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。
【図15】表示画像の合成及び表示の手順を示すフローチャートである。
【符号の説明】
【0132】
1…ナビゲーション装置、2…サーバ、3…アクセスポイント(AP)、4…通信ネットワーク
【特許請求の範囲】
【請求項1】
目的地までの経路を案内するナビゲーション装置であって、
前記目的地までの経路を示す経路データを取得する経路データ取得手段と、
前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、
前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理手段と、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行うリルート判定手段と、
を備えるナビゲーション装置。
【請求項2】
前記位置データ取得手段は、定期的又は不定期的に、前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記閾値管理手段は、前記第一の閾値に加えて、前記リルート判定に用いられる第二の閾値を都市タイプごとに管理し、
前記リルート判定手段は、前記位置データ取得手段が位置データを取得するごとに、前記現在位置と前記目的地までの経路との距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定するとともに、前記第一の閾値を超えた回数をカウントし、前記カウントされた回数が前記現在位置の周辺地域の都市タイプに対応する第二の閾値を超えたか否かを判定し、前記第二の閾値を超えた場合に経路の再探索が必要と判定する、
請求項1記載のナビゲーション装置。
【請求項3】
前記閾値管理手段は、前記第一の閾値に加えて、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、
を更に備える請求項1又は2記載のナビゲーション装置。
【請求項4】
表示部と、
前記リルート判定において経路の再探索が必要との結果が得られた場合、前記リルート判定の結果を前記表示部に表示させるとともに、経路の再探索を行うか否かの指示をユーザから受け付けるユーザ指示受付手段と、
前記ユーザ指示受付手段が受け付けた指示に基づいて、前記第一の閾値及び/又は前記第二の閾値を修正する閾値修正手段と、
を更に備える請求項1から3のうちのいずれかに記載のナビゲーション装置。
【請求項5】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、
前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、を更に備え、
前記閾値管理手段は、都市タイプ及びナビゲーションモードの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記選択されているナビゲーションモードの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項6】
現在通過中の道路の道路タイプを取得する道路タイプ取得手段、を更に備え、
前記閾値管理手段は、都市タイプ及び道路タイプの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項7】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、
前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、
現在通過中の道路の道路タイプを取得する道路タイプ取得手段と、を更に備え、
前記閾値管理手段は、都市タイプ、ナビゲーションモード及び道路タイプの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ、前記選択されているナビゲーションモード及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項8】
目的地までの経路を案内するナビゲーション装置であって、
前記目的地までの経路を示す経路データを取得する経路データ取得手段と、
前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、
前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、
前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を、都市タイプごとに管理する閾値管理手段と、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、
を備えるナビゲーション装置。
【請求項9】
計数手段を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定する、
請求項1から8のうちのいずれかに記載のナビゲーション装置。
【請求項10】
目的地までの経路を案内するナビゲーション装置が行うナビゲーション方法であって、
前記目的地までの経路を示す経路データを取得し、
前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記現在位置の周辺地域を示す地図データを取得し、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定し、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、
前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
ナビゲーション方法。
【請求項11】
目的地までの経路を案内するナビゲーション装置が行うナビゲーション方法を実現するコンピュータプログラムであって、
前記目的地までの経路を示す経路データを取得し、
前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記現在位置の周辺地域を示す地図データを取得し、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定し、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、
前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
コンピュータプログラム。
【請求項1】
目的地までの経路を案内するナビゲーション装置であって、
前記目的地までの経路を示す経路データを取得する経路データ取得手段と、
前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、
前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理する閾値管理手段と、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行うリルート判定手段と、
を備えるナビゲーション装置。
【請求項2】
前記位置データ取得手段は、定期的又は不定期的に、前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記閾値管理手段は、前記第一の閾値に加えて、前記リルート判定に用いられる第二の閾値を都市タイプごとに管理し、
前記リルート判定手段は、前記位置データ取得手段が位置データを取得するごとに、前記現在位置と前記目的地までの経路との距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定するとともに、前記第一の閾値を超えた回数をカウントし、前記カウントされた回数が前記現在位置の周辺地域の都市タイプに対応する第二の閾値を超えたか否かを判定し、前記第二の閾値を超えた場合に経路の再探索が必要と判定する、
請求項1記載のナビゲーション装置。
【請求項3】
前記閾値管理手段は、前記第一の閾値に加えて、前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、
を更に備える請求項1又は2記載のナビゲーション装置。
【請求項4】
表示部と、
前記リルート判定において経路の再探索が必要との結果が得られた場合、前記リルート判定の結果を前記表示部に表示させるとともに、経路の再探索を行うか否かの指示をユーザから受け付けるユーザ指示受付手段と、
前記ユーザ指示受付手段が受け付けた指示に基づいて、前記第一の閾値及び/又は前記第二の閾値を修正する閾値修正手段と、
を更に備える請求項1から3のうちのいずれかに記載のナビゲーション装置。
【請求項5】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、
前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、を更に備え、
前記閾値管理手段は、都市タイプ及びナビゲーションモードの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記選択されているナビゲーションモードの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項6】
現在通過中の道路の道路タイプを取得する道路タイプ取得手段、を更に備え、
前記閾値管理手段は、都市タイプ及び道路タイプの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項7】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のナビゲーションモードのうちのいずれかを選択するモード選択手段と、
前記モード選択手段によって選択されているナビゲーションモードを取得するモード取得部と、
現在通過中の道路の道路タイプを取得する道路タイプ取得手段と、を更に備え、
前記閾値管理手段は、都市タイプ、ナビゲーションモード及び道路タイプの組み合わせごとに、第一の閾値を管理し、
前記リルート判定手段は、前記計算された距離が、前記現在位置の周辺地域の都市タイプ、前記選択されているナビゲーションモード及び前記道路タイプ取得手段によって取得された道路タイプの組み合わせに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
請求項1から4のうちのいずれかに記載のナビゲーション装置。
【請求項8】
目的地までの経路を案内するナビゲーション装置であって、
前記目的地までの経路を示す経路データを取得する経路データ取得手段と、
前記ナビゲーション装置の現在位置を示す位置データを取得する位置データ取得手段と、
前記現在位置の周辺地域を示す地図データを取得する地図データ取得手段と、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定する都市タイプ判定手段と、
前記現在位置を示す位置データの補正を行う際に用いられる第三の閾値を、都市タイプごとに管理する閾値管理手段と、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第三の閾値以下であるか否かを判定し、前記第三の閾値以下である場合、前記現在位置を示す位置データを、前記目的地までの経路上の位置を示す位置データへ補正する補正手段と、
を備えるナビゲーション装置。
【請求項9】
計数手段を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定する、
請求項1から8のうちのいずれかに記載のナビゲーション装置。
【請求項10】
目的地までの経路を案内するナビゲーション装置が行うナビゲーション方法であって、
前記目的地までの経路を示す経路データを取得し、
前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記現在位置の周辺地域を示す地図データを取得し、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定し、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、
前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
ナビゲーション方法。
【請求項11】
目的地までの経路を案内するナビゲーション装置が行うナビゲーション方法を実現するコンピュータプログラムであって、
前記目的地までの経路を示す経路データを取得し、
前記ナビゲーション装置の現在位置を示す位置データを取得し、
前記現在位置の周辺地域を示す地図データを取得し、
前記現在位置の周辺地域を示す地図データに基づいて、前記現在位置の周辺地域の都市タイプを判定し、
経路の再探索を行う必要があるか否かの判定であるリルート判定に用いられる第一の閾値を、都市タイプごとに管理し、
前記現在位置を示す位置データ、前記経路データ及び前記現在位置の周辺地域を示す地図データに基づいて前記現在位置と前記目的地までの経路との距離を計算し、
前記計算された距離が前記現在位置の周辺地域の都市タイプに対応する第一の閾値を超えているか否かを判定することにより、前記リルート判定を行う、
コンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−101838(P2010−101838A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−275655(P2008−275655)
【出願日】平成20年10月27日(2008.10.27)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月27日(2008.10.27)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
[ Back to top ]