
ナビゲーション装置
【課題】方位を変化させる施設に関する情報などを用いずに、方位を正しく算出する。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に方位センサを備えたナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置において、イグニッションスイッチがOFFの間に車両の方位が変化した場合に、イグニッションスイッチがONにされた直後に正しい車両の方位(初期方位)を検出するための技術が知られている。
【0003】
例えば、特許文献1には、車両の方位を変化させる施設(駐車場など)の位置およびその方位情報を地図データとともに予め記憶し、車両が当該施設に停車した場合に、停車直前の第1の方位と当該施設の方位情報とに基づいて第2の方位を算出し、当該第2の方位に基づいて初期方位を補正するナビゲーション装置が記載されている。
【0004】
【特許文献1】特開平7−280578号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の技術では、車両の方位を変化させる施設の位置および方位情報がナビゲーション装置に登録されていない施設においては、車両の初期方位が正しく算出されない。また、全ての施設について方位情報などを登録することは現実的に困難である。
【0006】
そこで、本発明は、方位を変化させる施設に関する情報などを用いずに、方位を正しく算出するための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するための本発明の一態様は、方位に基づく信号を出力する方位センサと、前記方位センサから出力された方位に基づく信号を取得する方位センサ制御手段と、前記方位センサ制御手段から出力される方位に基づく信号を利用し、方位を算出する主制御手段と、前記方位センサ制御手段に供給される電源のオンもしくはオフを切り替える電源切り替え手段と、前記主制御手段が動作を停止しているときに、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする電源制御手段と、を備えることを特徴とするナビゲーション装置である。
【0008】
ここで、上記のナビゲーション装置であって、振動を検知する振動検知手段を備え、前記電源制御手段は、前記振動検知手段が振動を検知したとき、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0009】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記振動検知手段が振動を検知したとき、所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0010】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記方位に基づく信号を取得し、前記信号が前記方位の変化を示す場合、当該変化から所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0011】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記主制御手段が動作を停止したときから所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0012】
また、上記のナビゲーション装置であって、前記方位センサ制御手段は、前記方位に基づく信号を記憶する記憶手段を備え、前記主制御手段が動作しているとき、前記主制御手段に対し前記記憶手段に記憶した方位に基づく信号を出力する、ことを特徴としていてもよい。
【0013】
また、上記のナビゲーション装置であって、前記方位センサは、車両に搭載され、当該車両の方位を検出し、前記振動検知手段は、前記車両の振動を検知する、ことを特徴としていてもよい。
【発明の効果】
【0014】
本発明によれば、主制御手段が動作を停止している間に方位が変化しても、方位が正しく算出される。
【発明を実施するための最良の形態】
【0015】
以下、本発明の一実施形態について、図面を参照して説明する。
【0016】
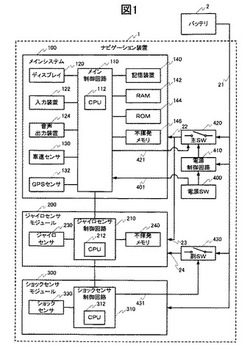
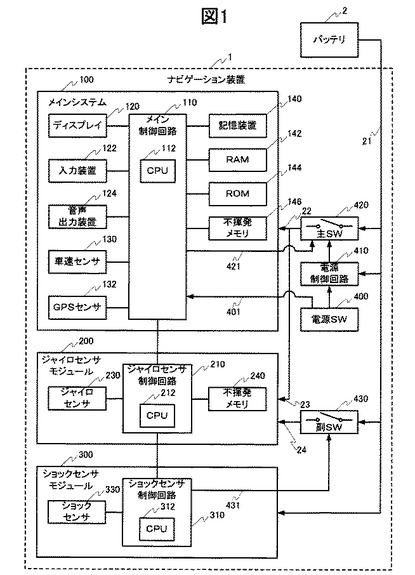
図1は、本発明の一実施形態に係るナビゲーション装置1のハードウェア構成の概要を示すブロック図である。
【0017】
ナビゲーション装置1は、車両などに搭載され、地図情報、経路情報、渋滞情報などの交通情報を表示してユーザを誘導するナビゲーション処理を行うための装置である。
【0018】
ナビゲーション装置1は、バッテリ2と接続され、バッテリ2から電源の供給を受ける。
【0019】
ナビゲーション装置1は、メインシステム100、ジャイロセンサモジュール200、ショックセンサモジュール300、電源スイッチ(電源SW)400、電源制御回路410、主電源制御スイッチ(主SW)420、副電源制御スイッチ(副SW)430を有する。
【0020】
電源スイッチ400は、イグニッションスイッチなどからなる。電源スイッチ400は、ONもしくはOFFを示す信号を、信号線を介して電源制御回路410に送る。また、電源スイッチ400は、ONもしくはOFFを示す信号を、信号線401を介してメイン制御回路110に送る。
【0021】
電源制御回路410は、電源スイッチ400から送られた信号に従って、主電源制御スイッチ420をOFFからONに切り替える制御を行う。電源制御回路410は、電源線21を介してバッテリ2から電源の供給を受ける。
【0022】
主電源制御スイッチ420は、後述するように、メイン制御回路110の制御により、ONからOFFに切り替わる。主電源制御スイッチ420は、電源線21を介してバッテリ2から電源の供給を受ける。主電源制御スイッチ420がONの場合、電源線22を介してメインシステム100に電源が供給され、また、電源線23を介してジャイロセンサモジュール200に電源が供給される。
【0023】
副電源制御スイッチ430は、ショックセンサモジュール300の制御により、ONもしくはOFFに切り替わる。副電源制御スイッチ430は、電源線21を介してバッテリ2から電源の供給を受ける。副電源制御スイッチ430がONの場合、電源線24を介してジャイロセンサモジュール200に電源が供給される。
【0024】
メインシステム100は、主電源制御スイッチ420から電源の供給を受け、動作する。メインシステム100は、メイン制御回路110、ディスプレイ120、入力装置122、音声出力装置124、車速センサ130、GPSセンサ132、記憶装置140、RAM142、ROM144、不揮発メモリ146などを有する。
【0025】
メイン制御回路110は、上記の各装置を制御し、様々な処理を行う中心的ユニットである。メイン制御回路110は、各種演算処理を行うCPU112、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0026】
メイン制御回路110は、CPU112が、記憶装置140、ROM144、不揮発メモリ146から所定のプログラムやデータをRAM142上にロードして実行することにより、各種処理を行う。
【0027】
メイン制御回路110は、例えば、車速センサ130、GPSセンサ132、ジャイロセンサモジュール200から出力されるデータを用いて現在地情報(車両の方位を特定する情報を含む)を算出する。また、得られた現在地情報に基づいて、表示に必要な地図情報を記憶装置140から読み出す。
【0028】
また、メイン制御回路110は、読み出した地図情報をグラフィックス展開し、そこに現在地および車両の方位を示すマークを重ねてディスプレイ120へ表示する。また、地図情報を用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を算出して、ディスプレイ120へ表示する。
【0029】
また、メイン制御回路110は、例えば、音声出力装置124(例えば、スピーカ)を介してユーザを誘導するための音声や操作音を出力する。また、入力装置122(例えば、タッチパネル、ハードスイッチなど)を介してユーザの要求を受け付け、要求に対応する処理を実行する。
【0030】
また、メイン制御回路110は、電源の制御を行う。メイン制御回路110は、ONもしくはOFFを示す信号を、電源スイッチ400から信号線401を介して受け付ける。OFFを示す信号を受け付けた場合、メイン制御回路110は、所定時間の間、主電源制御スイッチ420がONで保持されるように、信号線421を介して制御する。また、所定時間の経過後、メイン制御回路110は、主電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、また、主電源制御スイッチ420をOFFに切り替える。
【0031】
ディスプレイ120は、メイン制御回路110で生成されたグラフィックス情報を表示する装置である。ディスプレイ120は、例えば、液晶ディスプレイ、有機EL(Electro-Luminescence)ディスプレイなどである。
【0032】
入力装置122は、ユーザの操作を受け付けるための装置である。入力装置122は、タッチパネル、ハードスイッチであるスクロールキー、縮尺変更キー、キーボードなどである。
【0033】
音声出力装置124は、音声を出力するための装置である。音声出力装置124は、スピーカなどからなる。スピーカは、メイン制御回路110で生成された音声信号を出力する。
【0034】
車速センサ130、GPSセンサ132は、ジャイロセンサモジュール200のジャイロセンサ230とともに、車両の現在位置などを検出するために使用される。
【0035】
車速センサ130は、車速を算出するために用いる車速データを出力するセンサである。GPSセンサ132は、GPS衛星からの信号を受信し、車両とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、車両の現在位置や進行速度を測定する装置である。ジャイロセンサ230については、後述する。
【0036】
記憶装置140には、メイン制御回路110が各種処理を実行するために必要な、プログラムやデータ、ナビゲーション処理に使用される地図情報、音声認識に使用される音声辞書などが格納される。これらの情報は、メイン制御回路110のCPU112によってRAM142に読み出されて使用される。記憶装置140は、例えば、HDD(Hard Disk Drive)、CD-ROM、DVD-ROMなどにより構成される。
【0037】
RAM142には、CPU112により実行されるプログラム等が格納される。ROM144には、各種装置の起動に必要なプログラム等が格納される。不揮発メモリ146には、CPU112により実行されるプログラム、電源がOFFになったときに保持しておくべきデータ等が格納される。不揮発メモリ146は、例えば、フラッシュROMである。
【0038】
ジャイロセンサモジュール200は、主電源制御スイッチ420から電源線23を介して、もしくは、副電源制御スイッチ430から電源線24を介して、電源の供給を受け、動作する。ジャイロセンサモジュール200は、ジャイロセンサ制御回路210、ジャイロセンサ230、不揮発メモリ240などを有する。
【0039】
ジャイロセンサ230は、光ファイバジャイロや振動ジャイロ等で構成され、車両の回転による角速度を検出するものである。角速度データは、ジャイロセンサ制御回路210に出力される。
【0040】
ジャイロセンサ制御回路210は、車両の方位の変化量(回転角度)を算出するユニットである。ジャイロセンサ制御回路210は、CPU212、RAM、ROM、タイマ、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0041】
ジャイロセンサ制御回路210は、CPU212が、ROMから所定のプログラムやデータをRAM上にロードして実行することにより、各種処理を行う。
【0042】
ジャイロセンサ制御回路210は、ジャイロセンサ230から出力される角速度を示すデータ(角速度データ)を受け付け、積分演算により方位の変化量を算出する。ジャイロセンサ制御回路210は、算出した方位の変化量を示すデータ(変化量データ)を、不揮発メモリ240に格納する。また、ジャイロセンサ制御回路210は、メイン制御回路110もしくはショックセンサ制御回路310のそれぞれの要求に応じて、算出した変化量データをメイン制御回路110もしくはショックセンサ制御回路310に送る。
【0043】
なお、メイン制御回路110もしくはショックセンサ制御回路310が上記の要求をジャイロセンサ制御回路210には送らずに、ジャイロセンサ制御回路210が定期的に変化量データを送信するようにしてもよい。
【0044】
ショックセンサモジュール300は、バッテリ2から電源線21を介して電源の供給を受け、動作する。すなわち、電源スイッチ400がOFFに設定されても、電源が継続的に供給され、動作可能である。ショックセンサモジュール300は、ショックセンサ制御回路310、ショックセンサ330などを有する。
【0045】
ショックセンサ330は、圧電素子等で構成され、車両の振動を検出するセンサである。振動を示すデータは、ショックセンサ制御回路310に出力される。なお、ショックセンサ330は、イグニッションスイッチがOFFの間に駆動される。そのため、省電力のセンサを用いる。
【0046】
ショックセンサ制御回路310は、車両の振動に関する演算を行うユニットである。ショックセンサ制御回路310は、CPU312、RAM、ROM、タイマ、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0047】
ショックセンサ制御回路310は、CPU312が、ROMから所定のプログラムやデータをRAM上にロードして実行することにより、各種処理を行う。
【0048】
ショックセンサ制御回路310は、ショックセンサ330から出力される振動を示すデータ(振動データ)を受け付け、車両の振動や、車両に対する衝撃を検知する。また、ショックセンサ制御回路310は、電源の制御を行う。ショックセンサ制御回路310は、振動を検知した場合、所定時間の間、信号線431を介して副電源制御スイッチ430をONに設定する。また、所定時時間の経過後、副電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、副電源制御スイッチ430をOFFに切り替える。
【0049】
なお、ショックセンサ制御回路310は、車両のドアの開閉などにより、副電源制御スイッチ430をONに設定しないように構成される。例えば、検知した振動データが所定値より小さい場合は、車両の方位が変化していないと判定し、副電源制御スイッチ430をONに設定しないように構成する。また、検知した振動データから特定されるのパターンを、予め記憶した振動パターンと比較することにより、車両の方位が変化であるか否かを判定するように構成してもよい。
【0050】
以上が、ナビゲーション装置1の構成である。もちろん、ナビゲーション装置1の構成は上記に限られない。例えば、ナビゲーション装置1は、ショックセンサ330を複数備えていてもよい。
【0051】
本実施形態に係るナビゲーション装置1(図1)は、上記の通り、主電源制御スイッチ420と別に、独立した副電源制御スイッチ430を備える。この構成により、ナビゲーション装置1は、主電源制御スイッチ420がOFFにされた後も、副電源制御スイッチ430のONにより、ジャイロセンサモジュール200を動作させることができる。
【0052】
また、ナビゲーション装置1は、メイン制御回路110が主電源制御スイッチ420のONもしくはOFFを制御するための信号線421を備える。この構成により、ナビゲーション装置1は、電源スイッチ400がOFFにされた後、所定時間の間、主電源制御スイッチ420をONに保持して、ジャイロセンサモジュール200を動作させることができる。
【0053】
次に、本実施形態のナビゲーション装置1における、メインシステム100、ジャイロセンサモジュール200、ショックセンサモジュール300の間の電源制御および車両の方位の算出について説明する。
【0054】
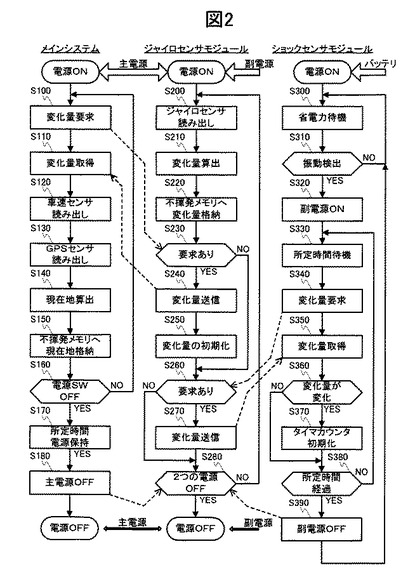
図2は、本実施形態のナビゲーション装置1における、電源制御および車両の方位の算出に関する処理を説明するためのフロー図である。
【0055】
まず、メインシステム100のフローについて説明する。
【0056】
本フローは、ユーザの操作により電源スイッチ400がONに切り替えられた場合に開始される。すなわち、メインシステム100に主電源制御スイッチ420を介して電源が供給され、メインシステム100が電源ONになった場合に開始される。
【0057】
まず、S100では、メイン制御回路110は、ジャイロセンサ制御回路210に方位の変化量データを要求する。次に、S110では、メイン制御回路110は、ジャイロセンサ制御回路210から出力された方位の変化量データを取得し、車両の方位を算出する。
【0058】
次に、S120では、メイン制御回路110は、車速センサ130から車速データを読み出す。次に、S130では、メイン制御回路110は、GPSセンサ132から、車両の現在地を示すデータなどを読み出す。
【0059】
次に、S140では、メイン制御回路110は、S110〜130で取得した各種データ、記憶装置140に格納された地図情報などを用いて、現在地情報(車両の方位を特定する情報を含む)を算出する。次に、S150では、メイン制御回路110は、S140で算出した現在地情報を不揮発メモリ146に格納する。
【0060】
次に、S160では、メイン制御回路110は、電源スイッチ400がOFFに切り替えられたか否かを判定する。具体的には、メイン制御回路110は、信号線401を介して、電源スイッチ400からOFFを示す信号が送られてきたか否かを判定する。OFFを示す信号が送られてきた場合(S160:YES)、処理をS170に進める。一方、OFFを示す信号が送られてきていない場合(S160:NO)、処理をS100に戻す。
【0061】
S170では、メイン制御回路110は、所定時間の間、電源を保持する。具体的には、メイン制御回路110は、主電源制御スイッチ420がONで保持されるように、信号線421を介して制御する。また、メイン制御回路110は、タイマカウンタなどにより、所定時間(例えば、5分)を計測する。そして、所定時間が経過した場合、処理をS180に進める。
【0062】
上記のような構成により、所定時間の間(S170)、ジャイロセンサモジュール200の後述する処理(S200〜S280)が繰り返し実行される。すなわち、電源スイッチ400がOFFにされても、所定時間の間、車両の方位の変化量が算出される。なお、メイン制御回路110は、所定時間の間、S180の処理に必要のない、ディスプレイ120、入力装置122、音声出力装置124、車速センサ130、GPSセンサ132、記憶装置140などの動作を停止するようにしてもよい。
【0063】
S180では、メイン制御回路110は、主電源制御スイッチ420をOFFに切り替える。具体的には、主電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、主電源制御スイッチ420をOFFに切り替える。
【0064】
主電源制御スイッチ420がOFFにされると、メインシステム100への電源供給が停止され、メインシステム100は電源OFFに移行する。
【0065】
以上がメインシステム100のフローである。
【0066】
次に、ジャイロセンサモジュール200のフローについて説明する。
【0067】
本フローは、ユーザの操作により電源スイッチ400がONに切り替えられた場合、すなわち、ジャイロセンサモジュール200に主電源制御スイッチ420を介して電源が供給された場合に開始される。または、本フローは、ショックセンサモジュール300の制御により副電源制御スイッチ430がONに切り替えられた場合、すなわち、ジャイロセンサモジュール200に副電源制御スイッチ430を介して電源が供給された場合に開始される。
【0068】
まず、S200では、ジャイロセンサ制御回路210は、ジャイロセンサ230から角速度データを読み出す。次に、S210では、ジャイロセンサ制御回路210は、取得した角速度データから積分演算により方位の変化量データを算出する。次に、S220では、ジャイロセンサ制御回路210は、S210で算出した変化量データを不揮発メモリ240に格納する。
【0069】
次に、S230では、ジャイロセンサ制御回路210は、メイン制御回路110から、変化量データの要求があったか否かを判定する。変化量データの要求があった場合(S230:YES)、処理をS240に進める。一方、変化量データの要求がない場合(S230:NO)、処理をS260に進める。
【0070】
S240では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を、メイン制御回路110に送る。次に、S250では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を初期化(クリア)する。そして、処理をS260に進める。
【0071】
S260では、ジャイロセンサ制御回路210は、ショックセンサ制御回路310から、変化量データの要求があったか否かを判定する。変化量データの要求があった場合(S260:YES)、処理をS270に進める。一方、変化量データの要求がない場合(S260:NO)、処理をS280に進める。
【0072】
S270では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を、ショックセンサ制御回路310に送る。そして、処理をS280に進める。
【0073】
S280では、ジャイロセンサ制御回路210は、主電源および副電源の2つの電源の両方がOFFに切り替えられるか否かを判定する。具体的には、ジャイロセンサ制御回路210は、メイン制御回路110から主電源をOFFにすること示す信号(S180)を受信し、かつ、ショックセンサ制御回路310から副電源をOFFにすること示す信号(S390)を受信したか否かを判定する。
【0074】
主電源および副電源がOFFに切り替えられない場合(S280:NO)、ジャイロセンサ制御回路210は、処理をS200に戻す。一方、主電源および副電源がOFFに切り替えらる場合(S280:YES)、ジャイロセンサ制御回路210は、本フローを終了する。その後、主電源制御スイッチ420および副電源制御スイッチ430がOFFにされ、ジャイロセンサモジュール200への電源供給が停止され、ジャイロセンサモジュール200は電源OFFに移行する。
【0075】
以上が、ジャイロセンサモジュール200のフローである。
【0076】
次に、ショックセンサモジュール300のフローについて説明する。
【0077】
本フローは、電源スイッチ400のONもしくはOFFに係わらず、実行される。
【0078】
まず、S300では、ショックセンサ制御回路310は、CPU312、ROM、RAM等の消費電力を低減した省電力モードに移行する。
【0079】
次に、S310では、ショックセンサ制御回路310は、車両に振動があったか否かを検出する。具体的には、ショックセンサ制御回路310は、ショックセンサ330から振動データが送られたか否かを判定する。振動を検出した場合(S310:YES)、省電力モードから復帰し、処理をS320に進める。一方、振動を検出しなかった場合(S310:NO)、処理をS300に戻す。
【0080】
なお、主電源制御スイッチ420によりジャイロセンサモジュール200に電源が供給されている場合、すなわち、副電源制御スイッチ430がOFFでジャイロセンサモジュール200に電源が供給されている場合、ショックセンサ制御回路310は、振動の検出を行わず(S310:NO)、省電力モードを継続する。
【0081】
S320では、ショックセンサ制御回路310は、副電源制御スイッチ430をONに切り替える。具体的には、信号線431を介して副電源制御スイッチ430をONに設定する。また、S380において所定時間の経過を判定するため、ショックセンサ制御回路310は、タイマカウンタにより時間の計測を開始する。
【0082】
次に、S330では、ショックセンサ制御回路310は、所定時間の間、待機する。具体的には、ショックセンサ制御回路310は、タイマカウンタにより、所定時間(例えば、1分)を計測する。そして、所定時間が経過した場合、処理をS340に進める。なお、この所定時間は、ジャイロセンサ制御回路210が、ジャイロセンサ230から出力されるデータを所定回数サンプリングするための時間である。
【0083】
S340では、ショックセンサ制御回路310は、ジャイロセンサ制御回路210に方位の変化量データを要求する。次に、S350では、ショックセンサ制御回路310は、ジャイロセンサ制御回路210から出力された方位の変化量データを取得する。
【0084】
次に、S360では、ショックセンサ制御回路310は、S350で取得した変化量データが前回S350で取得した変化量データから変化したか否かを判定する。変化量データに変化があった場合(S360:YES)、処理をS370に進める。一方、変化量データに変化がなかった場合(S360:NO)、処理をS380に進める。
【0085】
S370では、ショックセンサ制御回路310は、S320でカウントを開始したタイマカウンタを初期化(クリア)する。そして、処理をS380に進める。
【0086】
S380では、ショックセンサ制御回路310は、所定時間が経過したか否かを判定する。具体的には、ショックセンサ制御回路310は、S320でカウントを開始したタイマカウンタにより、副電源がONにされてから(S320)、所定時間(例えば、5分)が経過したか否かを判定する。所定時間が経過した場合(S380:YES)、処理をS390に進める。一方、所定時間が経過していない場合(S380:NO)、処理をS330に戻す。
【0087】
なお、変化量データに変化がある場合(S360:YES)、タイマカウンタが初期化される(S370)。これにより、継続して変化量データに変化がある場合、すなわち、車両の方位に変化がある場合、副電源がONに保持される時間が延長される。
【0088】
S390では、ショックセンサ制御回路310は、副電源制御スイッチ430をOFFに切り替える。具体的には、副電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、副電源制御スイッチ430をOFFに切り替える。その後、処理をS300に戻す。
【0089】
以上がショックセンサモジュール300のフローである。
【0090】
上記のようにメインシステム100が動作することにより、電源スイッチ400がOFFにされた後、所定時間の間、ジャイロセンサモジュール200により車両の方位の変化量が算出され、不揮発メモリ240に格納される。電源スイッチ400がONにされた場合は、メイン制御回路110は、ジャイロセンサモジュール200の不揮発メモリ240に格納された変化量データに基づいて、車両の初期方位を算出することができる。
【0091】
また、上記のようにショックセンサモジュール300が動作することにより、ジャイロセンサモジュール200への主電源の供給が停止された後、車両の振動が検知された場合には、ジャイロセンサモジュール200への副電源の供給が開始される。そして、所定時間の間、ジャイロセンサモジュール200により車両の方位の変化量が算出される。電源スイッチ400がONにされた場合は、メイン制御回路110は、ジャイロセンサモジュール200の不揮発メモリ240に格納された変化量データに基づいて、車両の初期方位を算出することができる。
【0092】
なお、本実施形態は以下のような変形を行ってもよい。また、各種変形は組み合わせても良い。
【0093】
例えば、主電源制御スイッチ420によりジャイロセンサモジュール200の電源がONに設定されている場合、ショックセンサモジュール300の電源がOFFになるようにしてもよい。具体的には、主電源制御スイッチ420がOFFの場合に、ショックセンサモジュール300への電源供給を行う電源制御スイッチを設ける。このようにすれば、ショックセンサモジュール300に常時電源を供給する必要がない。
【0094】
また、例えば、主電源制御スイッチ420がOFFにされた後、所定時間の間、ジャイロセンサモジュール200は、副電源制御スイッチ430をONに設定できるようにしてもよい。
【0095】
具体的には、ジャイロセンサ制御回路210と、副電源制御スイッチ430とを信号線で接続する。ジャイロセンサ制御回路210は、メイン制御回路110から主電源制御スイッチ420をOFFにする通知を受け付けた場合に、信号線を介して副電源制御スイッチ430をONに切り替える。所定時間の経過後、副電源制御スイッチ430をOFFに切り替える。あるいは、ジャイロセンサ制御回路210がメイン制御回路110から主電源制御スイッチ420をOFFにする通知を受けたとき、ジャイロセンサ制御回路210からショックセンサ制御回路310に副電源制御スイッチ430をOFFにするよう指示を出し、ショックセンサ制御回路310はこの指示を受けてから所定時間経過後に、副電源制御スイッチ430をOFFにするようにしてもよい。なお、これらの場合、メイン制御回路110は、S170(図2)を行う必要はない。
【0096】
また、例えば、ジャイロセンサモジュール200が低消費電力である場合、イグニッションスイッチのONもしくはOFFに係わらず、継続的に電源が供給されるようにしてもよい。このようにすれば、ショックセンサモジュール300を設ける必要がない。
【0097】
また、例えば、メイン制御回路110は、S170(図2)において、変化量データをジャイロセンサ制御回路210から定期的に取得し、変化量データに変化がある場合、すなわち、車両の方位に変化がある場合、主電源がONに保持される所定時間を延長するようにしてもよい。
【0098】
以上、本発明の一実施形態について説明した。本実施形態によれば、車両の方位を変化させる施設に関する情報などを用いずに、車両の初期方位を正しく算出することができる。
【0099】
例えば、タワー型のパーキングにおいて、イグニッションスイッチがOFFにされた後(入庫直後や、出庫直前)に、ターンテーブルの回転などにより車両の方位が変わったとしても、車両の方位の変化を検知することができる。そして、イグニッションスイッチがONされたときに、正しく初期方位を算出することができる。
【図面の簡単な説明】
【0100】
【図1】本発明の一実施形態に係るナビゲーション装置1のハードウェア構成の概要を示すブロック図。
【図2】本発明の一実施形態に係るナビゲーション装置1の、電源制御および車両の方位の算出に関する処理を説明するためのフロー図。
【符号の説明】
【0101】
1:ナビゲーション装置、2:バッテリ、21〜24:電源線、100:メインモジュール、110:メイン制御回路、112:CPU、120:ディスプレイ、122:入力装置、124:音声出力装置、130:車速センサ、132:GPSセンサ、140:記憶装置、142:RAM、144:ROM、146:不揮発メモリ、200:ジャイロセンサモジュール、210:ジャイロセンサ制御回路、212:CPU、230:ジャイロセンサ、240:不揮発メモリ、300:ショックセンサモジュール、310:ショックセンサ制御回路、312:CPU、330:ショックセンサ、400:電源SW(電源スイッチ)、401:信号線、410:電源制御回路、420:主SW(主電源制御スイッチ)、421:信号線、430:副SW(副電源制御スイッチ)、431:信号線
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に方位センサを備えたナビゲーション装置に関する。
【背景技術】
【0002】
ナビゲーション装置において、イグニッションスイッチがOFFの間に車両の方位が変化した場合に、イグニッションスイッチがONにされた直後に正しい車両の方位(初期方位)を検出するための技術が知られている。
【0003】
例えば、特許文献1には、車両の方位を変化させる施設(駐車場など)の位置およびその方位情報を地図データとともに予め記憶し、車両が当該施設に停車した場合に、停車直前の第1の方位と当該施設の方位情報とに基づいて第2の方位を算出し、当該第2の方位に基づいて初期方位を補正するナビゲーション装置が記載されている。
【0004】
【特許文献1】特開平7−280578号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の技術では、車両の方位を変化させる施設の位置および方位情報がナビゲーション装置に登録されていない施設においては、車両の初期方位が正しく算出されない。また、全ての施設について方位情報などを登録することは現実的に困難である。
【0006】
そこで、本発明は、方位を変化させる施設に関する情報などを用いずに、方位を正しく算出するための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するための本発明の一態様は、方位に基づく信号を出力する方位センサと、前記方位センサから出力された方位に基づく信号を取得する方位センサ制御手段と、前記方位センサ制御手段から出力される方位に基づく信号を利用し、方位を算出する主制御手段と、前記方位センサ制御手段に供給される電源のオンもしくはオフを切り替える電源切り替え手段と、前記主制御手段が動作を停止しているときに、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする電源制御手段と、を備えることを特徴とするナビゲーション装置である。
【0008】
ここで、上記のナビゲーション装置であって、振動を検知する振動検知手段を備え、前記電源制御手段は、前記振動検知手段が振動を検知したとき、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0009】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記振動検知手段が振動を検知したとき、所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0010】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記方位に基づく信号を取得し、前記信号が前記方位の変化を示す場合、当該変化から所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0011】
また、上記のナビゲーション装置であって、前記電源制御手段は、前記主制御手段が動作を停止したときから所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、ことを特徴としていてもよい。
【0012】
また、上記のナビゲーション装置であって、前記方位センサ制御手段は、前記方位に基づく信号を記憶する記憶手段を備え、前記主制御手段が動作しているとき、前記主制御手段に対し前記記憶手段に記憶した方位に基づく信号を出力する、ことを特徴としていてもよい。
【0013】
また、上記のナビゲーション装置であって、前記方位センサは、車両に搭載され、当該車両の方位を検出し、前記振動検知手段は、前記車両の振動を検知する、ことを特徴としていてもよい。
【発明の効果】
【0014】
本発明によれば、主制御手段が動作を停止している間に方位が変化しても、方位が正しく算出される。
【発明を実施するための最良の形態】
【0015】
以下、本発明の一実施形態について、図面を参照して説明する。
【0016】
図1は、本発明の一実施形態に係るナビゲーション装置1のハードウェア構成の概要を示すブロック図である。
【0017】
ナビゲーション装置1は、車両などに搭載され、地図情報、経路情報、渋滞情報などの交通情報を表示してユーザを誘導するナビゲーション処理を行うための装置である。
【0018】
ナビゲーション装置1は、バッテリ2と接続され、バッテリ2から電源の供給を受ける。
【0019】
ナビゲーション装置1は、メインシステム100、ジャイロセンサモジュール200、ショックセンサモジュール300、電源スイッチ(電源SW)400、電源制御回路410、主電源制御スイッチ(主SW)420、副電源制御スイッチ(副SW)430を有する。
【0020】
電源スイッチ400は、イグニッションスイッチなどからなる。電源スイッチ400は、ONもしくはOFFを示す信号を、信号線を介して電源制御回路410に送る。また、電源スイッチ400は、ONもしくはOFFを示す信号を、信号線401を介してメイン制御回路110に送る。
【0021】
電源制御回路410は、電源スイッチ400から送られた信号に従って、主電源制御スイッチ420をOFFからONに切り替える制御を行う。電源制御回路410は、電源線21を介してバッテリ2から電源の供給を受ける。
【0022】
主電源制御スイッチ420は、後述するように、メイン制御回路110の制御により、ONからOFFに切り替わる。主電源制御スイッチ420は、電源線21を介してバッテリ2から電源の供給を受ける。主電源制御スイッチ420がONの場合、電源線22を介してメインシステム100に電源が供給され、また、電源線23を介してジャイロセンサモジュール200に電源が供給される。
【0023】
副電源制御スイッチ430は、ショックセンサモジュール300の制御により、ONもしくはOFFに切り替わる。副電源制御スイッチ430は、電源線21を介してバッテリ2から電源の供給を受ける。副電源制御スイッチ430がONの場合、電源線24を介してジャイロセンサモジュール200に電源が供給される。
【0024】
メインシステム100は、主電源制御スイッチ420から電源の供給を受け、動作する。メインシステム100は、メイン制御回路110、ディスプレイ120、入力装置122、音声出力装置124、車速センサ130、GPSセンサ132、記憶装置140、RAM142、ROM144、不揮発メモリ146などを有する。
【0025】
メイン制御回路110は、上記の各装置を制御し、様々な処理を行う中心的ユニットである。メイン制御回路110は、各種演算処理を行うCPU112、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0026】
メイン制御回路110は、CPU112が、記憶装置140、ROM144、不揮発メモリ146から所定のプログラムやデータをRAM142上にロードして実行することにより、各種処理を行う。
【0027】
メイン制御回路110は、例えば、車速センサ130、GPSセンサ132、ジャイロセンサモジュール200から出力されるデータを用いて現在地情報(車両の方位を特定する情報を含む)を算出する。また、得られた現在地情報に基づいて、表示に必要な地図情報を記憶装置140から読み出す。
【0028】
また、メイン制御回路110は、読み出した地図情報をグラフィックス展開し、そこに現在地および車両の方位を示すマークを重ねてディスプレイ120へ表示する。また、地図情報を用いて、ユーザから指示された出発地(現在地)と目的地とを結ぶ最適な経路(推奨経路)を算出して、ディスプレイ120へ表示する。
【0029】
また、メイン制御回路110は、例えば、音声出力装置124(例えば、スピーカ)を介してユーザを誘導するための音声や操作音を出力する。また、入力装置122(例えば、タッチパネル、ハードスイッチなど)を介してユーザの要求を受け付け、要求に対応する処理を実行する。
【0030】
また、メイン制御回路110は、電源の制御を行う。メイン制御回路110は、ONもしくはOFFを示す信号を、電源スイッチ400から信号線401を介して受け付ける。OFFを示す信号を受け付けた場合、メイン制御回路110は、所定時間の間、主電源制御スイッチ420がONで保持されるように、信号線421を介して制御する。また、所定時間の経過後、メイン制御回路110は、主電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、また、主電源制御スイッチ420をOFFに切り替える。
【0031】
ディスプレイ120は、メイン制御回路110で生成されたグラフィックス情報を表示する装置である。ディスプレイ120は、例えば、液晶ディスプレイ、有機EL(Electro-Luminescence)ディスプレイなどである。
【0032】
入力装置122は、ユーザの操作を受け付けるための装置である。入力装置122は、タッチパネル、ハードスイッチであるスクロールキー、縮尺変更キー、キーボードなどである。
【0033】
音声出力装置124は、音声を出力するための装置である。音声出力装置124は、スピーカなどからなる。スピーカは、メイン制御回路110で生成された音声信号を出力する。
【0034】
車速センサ130、GPSセンサ132は、ジャイロセンサモジュール200のジャイロセンサ230とともに、車両の現在位置などを検出するために使用される。
【0035】
車速センサ130は、車速を算出するために用いる車速データを出力するセンサである。GPSセンサ132は、GPS衛星からの信号を受信し、車両とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、車両の現在位置や進行速度を測定する装置である。ジャイロセンサ230については、後述する。
【0036】
記憶装置140には、メイン制御回路110が各種処理を実行するために必要な、プログラムやデータ、ナビゲーション処理に使用される地図情報、音声認識に使用される音声辞書などが格納される。これらの情報は、メイン制御回路110のCPU112によってRAM142に読み出されて使用される。記憶装置140は、例えば、HDD(Hard Disk Drive)、CD-ROM、DVD-ROMなどにより構成される。
【0037】
RAM142には、CPU112により実行されるプログラム等が格納される。ROM144には、各種装置の起動に必要なプログラム等が格納される。不揮発メモリ146には、CPU112により実行されるプログラム、電源がOFFになったときに保持しておくべきデータ等が格納される。不揮発メモリ146は、例えば、フラッシュROMである。
【0038】
ジャイロセンサモジュール200は、主電源制御スイッチ420から電源線23を介して、もしくは、副電源制御スイッチ430から電源線24を介して、電源の供給を受け、動作する。ジャイロセンサモジュール200は、ジャイロセンサ制御回路210、ジャイロセンサ230、不揮発メモリ240などを有する。
【0039】
ジャイロセンサ230は、光ファイバジャイロや振動ジャイロ等で構成され、車両の回転による角速度を検出するものである。角速度データは、ジャイロセンサ制御回路210に出力される。
【0040】
ジャイロセンサ制御回路210は、車両の方位の変化量(回転角度)を算出するユニットである。ジャイロセンサ制御回路210は、CPU212、RAM、ROM、タイマ、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0041】
ジャイロセンサ制御回路210は、CPU212が、ROMから所定のプログラムやデータをRAM上にロードして実行することにより、各種処理を行う。
【0042】
ジャイロセンサ制御回路210は、ジャイロセンサ230から出力される角速度を示すデータ(角速度データ)を受け付け、積分演算により方位の変化量を算出する。ジャイロセンサ制御回路210は、算出した方位の変化量を示すデータ(変化量データ)を、不揮発メモリ240に格納する。また、ジャイロセンサ制御回路210は、メイン制御回路110もしくはショックセンサ制御回路310のそれぞれの要求に応じて、算出した変化量データをメイン制御回路110もしくはショックセンサ制御回路310に送る。
【0043】
なお、メイン制御回路110もしくはショックセンサ制御回路310が上記の要求をジャイロセンサ制御回路210には送らずに、ジャイロセンサ制御回路210が定期的に変化量データを送信するようにしてもよい。
【0044】
ショックセンサモジュール300は、バッテリ2から電源線21を介して電源の供給を受け、動作する。すなわち、電源スイッチ400がOFFに設定されても、電源が継続的に供給され、動作可能である。ショックセンサモジュール300は、ショックセンサ制御回路310、ショックセンサ330などを有する。
【0045】
ショックセンサ330は、圧電素子等で構成され、車両の振動を検出するセンサである。振動を示すデータは、ショックセンサ制御回路310に出力される。なお、ショックセンサ330は、イグニッションスイッチがOFFの間に駆動される。そのため、省電力のセンサを用いる。
【0046】
ショックセンサ制御回路310は、車両の振動に関する演算を行うユニットである。ショックセンサ制御回路310は、CPU312、RAM、ROM、タイマ、他の装置を通信により制御するためのインタフェース(図示しない)、などが信号線により接続されて構成される。
【0047】
ショックセンサ制御回路310は、CPU312が、ROMから所定のプログラムやデータをRAM上にロードして実行することにより、各種処理を行う。
【0048】
ショックセンサ制御回路310は、ショックセンサ330から出力される振動を示すデータ(振動データ)を受け付け、車両の振動や、車両に対する衝撃を検知する。また、ショックセンサ制御回路310は、電源の制御を行う。ショックセンサ制御回路310は、振動を検知した場合、所定時間の間、信号線431を介して副電源制御スイッチ430をONに設定する。また、所定時時間の経過後、副電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、副電源制御スイッチ430をOFFに切り替える。
【0049】
なお、ショックセンサ制御回路310は、車両のドアの開閉などにより、副電源制御スイッチ430をONに設定しないように構成される。例えば、検知した振動データが所定値より小さい場合は、車両の方位が変化していないと判定し、副電源制御スイッチ430をONに設定しないように構成する。また、検知した振動データから特定されるのパターンを、予め記憶した振動パターンと比較することにより、車両の方位が変化であるか否かを判定するように構成してもよい。
【0050】
以上が、ナビゲーション装置1の構成である。もちろん、ナビゲーション装置1の構成は上記に限られない。例えば、ナビゲーション装置1は、ショックセンサ330を複数備えていてもよい。
【0051】
本実施形態に係るナビゲーション装置1(図1)は、上記の通り、主電源制御スイッチ420と別に、独立した副電源制御スイッチ430を備える。この構成により、ナビゲーション装置1は、主電源制御スイッチ420がOFFにされた後も、副電源制御スイッチ430のONにより、ジャイロセンサモジュール200を動作させることができる。
【0052】
また、ナビゲーション装置1は、メイン制御回路110が主電源制御スイッチ420のONもしくはOFFを制御するための信号線421を備える。この構成により、ナビゲーション装置1は、電源スイッチ400がOFFにされた後、所定時間の間、主電源制御スイッチ420をONに保持して、ジャイロセンサモジュール200を動作させることができる。
【0053】
次に、本実施形態のナビゲーション装置1における、メインシステム100、ジャイロセンサモジュール200、ショックセンサモジュール300の間の電源制御および車両の方位の算出について説明する。
【0054】
図2は、本実施形態のナビゲーション装置1における、電源制御および車両の方位の算出に関する処理を説明するためのフロー図である。
【0055】
まず、メインシステム100のフローについて説明する。
【0056】
本フローは、ユーザの操作により電源スイッチ400がONに切り替えられた場合に開始される。すなわち、メインシステム100に主電源制御スイッチ420を介して電源が供給され、メインシステム100が電源ONになった場合に開始される。
【0057】
まず、S100では、メイン制御回路110は、ジャイロセンサ制御回路210に方位の変化量データを要求する。次に、S110では、メイン制御回路110は、ジャイロセンサ制御回路210から出力された方位の変化量データを取得し、車両の方位を算出する。
【0058】
次に、S120では、メイン制御回路110は、車速センサ130から車速データを読み出す。次に、S130では、メイン制御回路110は、GPSセンサ132から、車両の現在地を示すデータなどを読み出す。
【0059】
次に、S140では、メイン制御回路110は、S110〜130で取得した各種データ、記憶装置140に格納された地図情報などを用いて、現在地情報(車両の方位を特定する情報を含む)を算出する。次に、S150では、メイン制御回路110は、S140で算出した現在地情報を不揮発メモリ146に格納する。
【0060】
次に、S160では、メイン制御回路110は、電源スイッチ400がOFFに切り替えられたか否かを判定する。具体的には、メイン制御回路110は、信号線401を介して、電源スイッチ400からOFFを示す信号が送られてきたか否かを判定する。OFFを示す信号が送られてきた場合(S160:YES)、処理をS170に進める。一方、OFFを示す信号が送られてきていない場合(S160:NO)、処理をS100に戻す。
【0061】
S170では、メイン制御回路110は、所定時間の間、電源を保持する。具体的には、メイン制御回路110は、主電源制御スイッチ420がONで保持されるように、信号線421を介して制御する。また、メイン制御回路110は、タイマカウンタなどにより、所定時間(例えば、5分)を計測する。そして、所定時間が経過した場合、処理をS180に進める。
【0062】
上記のような構成により、所定時間の間(S170)、ジャイロセンサモジュール200の後述する処理(S200〜S280)が繰り返し実行される。すなわち、電源スイッチ400がOFFにされても、所定時間の間、車両の方位の変化量が算出される。なお、メイン制御回路110は、所定時間の間、S180の処理に必要のない、ディスプレイ120、入力装置122、音声出力装置124、車速センサ130、GPSセンサ132、記憶装置140などの動作を停止するようにしてもよい。
【0063】
S180では、メイン制御回路110は、主電源制御スイッチ420をOFFに切り替える。具体的には、主電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、主電源制御スイッチ420をOFFに切り替える。
【0064】
主電源制御スイッチ420がOFFにされると、メインシステム100への電源供給が停止され、メインシステム100は電源OFFに移行する。
【0065】
以上がメインシステム100のフローである。
【0066】
次に、ジャイロセンサモジュール200のフローについて説明する。
【0067】
本フローは、ユーザの操作により電源スイッチ400がONに切り替えられた場合、すなわち、ジャイロセンサモジュール200に主電源制御スイッチ420を介して電源が供給された場合に開始される。または、本フローは、ショックセンサモジュール300の制御により副電源制御スイッチ430がONに切り替えられた場合、すなわち、ジャイロセンサモジュール200に副電源制御スイッチ430を介して電源が供給された場合に開始される。
【0068】
まず、S200では、ジャイロセンサ制御回路210は、ジャイロセンサ230から角速度データを読み出す。次に、S210では、ジャイロセンサ制御回路210は、取得した角速度データから積分演算により方位の変化量データを算出する。次に、S220では、ジャイロセンサ制御回路210は、S210で算出した変化量データを不揮発メモリ240に格納する。
【0069】
次に、S230では、ジャイロセンサ制御回路210は、メイン制御回路110から、変化量データの要求があったか否かを判定する。変化量データの要求があった場合(S230:YES)、処理をS240に進める。一方、変化量データの要求がない場合(S230:NO)、処理をS260に進める。
【0070】
S240では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を、メイン制御回路110に送る。次に、S250では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を初期化(クリア)する。そして、処理をS260に進める。
【0071】
S260では、ジャイロセンサ制御回路210は、ショックセンサ制御回路310から、変化量データの要求があったか否かを判定する。変化量データの要求があった場合(S260:YES)、処理をS270に進める。一方、変化量データの要求がない場合(S260:NO)、処理をS280に進める。
【0072】
S270では、ジャイロセンサ制御回路210は、不揮発メモリ240に格納した変化量データ(S220)を、ショックセンサ制御回路310に送る。そして、処理をS280に進める。
【0073】
S280では、ジャイロセンサ制御回路210は、主電源および副電源の2つの電源の両方がOFFに切り替えられるか否かを判定する。具体的には、ジャイロセンサ制御回路210は、メイン制御回路110から主電源をOFFにすること示す信号(S180)を受信し、かつ、ショックセンサ制御回路310から副電源をOFFにすること示す信号(S390)を受信したか否かを判定する。
【0074】
主電源および副電源がOFFに切り替えられない場合(S280:NO)、ジャイロセンサ制御回路210は、処理をS200に戻す。一方、主電源および副電源がOFFに切り替えらる場合(S280:YES)、ジャイロセンサ制御回路210は、本フローを終了する。その後、主電源制御スイッチ420および副電源制御スイッチ430がOFFにされ、ジャイロセンサモジュール200への電源供給が停止され、ジャイロセンサモジュール200は電源OFFに移行する。
【0075】
以上が、ジャイロセンサモジュール200のフローである。
【0076】
次に、ショックセンサモジュール300のフローについて説明する。
【0077】
本フローは、電源スイッチ400のONもしくはOFFに係わらず、実行される。
【0078】
まず、S300では、ショックセンサ制御回路310は、CPU312、ROM、RAM等の消費電力を低減した省電力モードに移行する。
【0079】
次に、S310では、ショックセンサ制御回路310は、車両に振動があったか否かを検出する。具体的には、ショックセンサ制御回路310は、ショックセンサ330から振動データが送られたか否かを判定する。振動を検出した場合(S310:YES)、省電力モードから復帰し、処理をS320に進める。一方、振動を検出しなかった場合(S310:NO)、処理をS300に戻す。
【0080】
なお、主電源制御スイッチ420によりジャイロセンサモジュール200に電源が供給されている場合、すなわち、副電源制御スイッチ430がOFFでジャイロセンサモジュール200に電源が供給されている場合、ショックセンサ制御回路310は、振動の検出を行わず(S310:NO)、省電力モードを継続する。
【0081】
S320では、ショックセンサ制御回路310は、副電源制御スイッチ430をONに切り替える。具体的には、信号線431を介して副電源制御スイッチ430をONに設定する。また、S380において所定時間の経過を判定するため、ショックセンサ制御回路310は、タイマカウンタにより時間の計測を開始する。
【0082】
次に、S330では、ショックセンサ制御回路310は、所定時間の間、待機する。具体的には、ショックセンサ制御回路310は、タイマカウンタにより、所定時間(例えば、1分)を計測する。そして、所定時間が経過した場合、処理をS340に進める。なお、この所定時間は、ジャイロセンサ制御回路210が、ジャイロセンサ230から出力されるデータを所定回数サンプリングするための時間である。
【0083】
S340では、ショックセンサ制御回路310は、ジャイロセンサ制御回路210に方位の変化量データを要求する。次に、S350では、ショックセンサ制御回路310は、ジャイロセンサ制御回路210から出力された方位の変化量データを取得する。
【0084】
次に、S360では、ショックセンサ制御回路310は、S350で取得した変化量データが前回S350で取得した変化量データから変化したか否かを判定する。変化量データに変化があった場合(S360:YES)、処理をS370に進める。一方、変化量データに変化がなかった場合(S360:NO)、処理をS380に進める。
【0085】
S370では、ショックセンサ制御回路310は、S320でカウントを開始したタイマカウンタを初期化(クリア)する。そして、処理をS380に進める。
【0086】
S380では、ショックセンサ制御回路310は、所定時間が経過したか否かを判定する。具体的には、ショックセンサ制御回路310は、S320でカウントを開始したタイマカウンタにより、副電源がONにされてから(S320)、所定時間(例えば、5分)が経過したか否かを判定する。所定時間が経過した場合(S380:YES)、処理をS390に進める。一方、所定時間が経過していない場合(S380:NO)、処理をS330に戻す。
【0087】
なお、変化量データに変化がある場合(S360:YES)、タイマカウンタが初期化される(S370)。これにより、継続して変化量データに変化がある場合、すなわち、車両の方位に変化がある場合、副電源がONに保持される時間が延長される。
【0088】
S390では、ショックセンサ制御回路310は、副電源制御スイッチ430をOFFに切り替える。具体的には、副電源をOFFにすることを示す信号をジャイロセンサ制御回路210に送り、副電源制御スイッチ430をOFFに切り替える。その後、処理をS300に戻す。
【0089】
以上がショックセンサモジュール300のフローである。
【0090】
上記のようにメインシステム100が動作することにより、電源スイッチ400がOFFにされた後、所定時間の間、ジャイロセンサモジュール200により車両の方位の変化量が算出され、不揮発メモリ240に格納される。電源スイッチ400がONにされた場合は、メイン制御回路110は、ジャイロセンサモジュール200の不揮発メモリ240に格納された変化量データに基づいて、車両の初期方位を算出することができる。
【0091】
また、上記のようにショックセンサモジュール300が動作することにより、ジャイロセンサモジュール200への主電源の供給が停止された後、車両の振動が検知された場合には、ジャイロセンサモジュール200への副電源の供給が開始される。そして、所定時間の間、ジャイロセンサモジュール200により車両の方位の変化量が算出される。電源スイッチ400がONにされた場合は、メイン制御回路110は、ジャイロセンサモジュール200の不揮発メモリ240に格納された変化量データに基づいて、車両の初期方位を算出することができる。
【0092】
なお、本実施形態は以下のような変形を行ってもよい。また、各種変形は組み合わせても良い。
【0093】
例えば、主電源制御スイッチ420によりジャイロセンサモジュール200の電源がONに設定されている場合、ショックセンサモジュール300の電源がOFFになるようにしてもよい。具体的には、主電源制御スイッチ420がOFFの場合に、ショックセンサモジュール300への電源供給を行う電源制御スイッチを設ける。このようにすれば、ショックセンサモジュール300に常時電源を供給する必要がない。
【0094】
また、例えば、主電源制御スイッチ420がOFFにされた後、所定時間の間、ジャイロセンサモジュール200は、副電源制御スイッチ430をONに設定できるようにしてもよい。
【0095】
具体的には、ジャイロセンサ制御回路210と、副電源制御スイッチ430とを信号線で接続する。ジャイロセンサ制御回路210は、メイン制御回路110から主電源制御スイッチ420をOFFにする通知を受け付けた場合に、信号線を介して副電源制御スイッチ430をONに切り替える。所定時間の経過後、副電源制御スイッチ430をOFFに切り替える。あるいは、ジャイロセンサ制御回路210がメイン制御回路110から主電源制御スイッチ420をOFFにする通知を受けたとき、ジャイロセンサ制御回路210からショックセンサ制御回路310に副電源制御スイッチ430をOFFにするよう指示を出し、ショックセンサ制御回路310はこの指示を受けてから所定時間経過後に、副電源制御スイッチ430をOFFにするようにしてもよい。なお、これらの場合、メイン制御回路110は、S170(図2)を行う必要はない。
【0096】
また、例えば、ジャイロセンサモジュール200が低消費電力である場合、イグニッションスイッチのONもしくはOFFに係わらず、継続的に電源が供給されるようにしてもよい。このようにすれば、ショックセンサモジュール300を設ける必要がない。
【0097】
また、例えば、メイン制御回路110は、S170(図2)において、変化量データをジャイロセンサ制御回路210から定期的に取得し、変化量データに変化がある場合、すなわち、車両の方位に変化がある場合、主電源がONに保持される所定時間を延長するようにしてもよい。
【0098】
以上、本発明の一実施形態について説明した。本実施形態によれば、車両の方位を変化させる施設に関する情報などを用いずに、車両の初期方位を正しく算出することができる。
【0099】
例えば、タワー型のパーキングにおいて、イグニッションスイッチがOFFにされた後(入庫直後や、出庫直前)に、ターンテーブルの回転などにより車両の方位が変わったとしても、車両の方位の変化を検知することができる。そして、イグニッションスイッチがONされたときに、正しく初期方位を算出することができる。
【図面の簡単な説明】
【0100】
【図1】本発明の一実施形態に係るナビゲーション装置1のハードウェア構成の概要を示すブロック図。
【図2】本発明の一実施形態に係るナビゲーション装置1の、電源制御および車両の方位の算出に関する処理を説明するためのフロー図。
【符号の説明】
【0101】
1:ナビゲーション装置、2:バッテリ、21〜24:電源線、100:メインモジュール、110:メイン制御回路、112:CPU、120:ディスプレイ、122:入力装置、124:音声出力装置、130:車速センサ、132:GPSセンサ、140:記憶装置、142:RAM、144:ROM、146:不揮発メモリ、200:ジャイロセンサモジュール、210:ジャイロセンサ制御回路、212:CPU、230:ジャイロセンサ、240:不揮発メモリ、300:ショックセンサモジュール、310:ショックセンサ制御回路、312:CPU、330:ショックセンサ、400:電源SW(電源スイッチ)、401:信号線、410:電源制御回路、420:主SW(主電源制御スイッチ)、421:信号線、430:副SW(副電源制御スイッチ)、431:信号線
【特許請求の範囲】
【請求項1】
方位に基づく信号を出力する方位センサと、
前記方位センサから出力された方位に基づく信号を取得する方位センサ制御手段と、
前記方位センサ制御手段から出力される方位に基づく信号を利用し、方位を算出する主制御手段と、
前記方位センサ制御手段に供給される電源のオンもしくはオフを切り替える電源切り替え手段と、
前記主制御手段が動作を停止しているときに、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする電源制御手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
振動を検知する振動検知手段を備え、
前記電源制御手段は、
前記振動検知手段が振動を検知したとき、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項2記載のナビゲーション装置であって、
前記電源制御手段は、
前記振動検知手段が振動を検知したとき、所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項3記載のナビゲーション装置であって、
前記電源制御手段は、
前記方位に基づく信号を取得し、
前記信号が前記方位の変化を示す場合、当該変化から所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1記載のナビゲーション装置であって、
前記電源制御手段は、
前記主制御手段が動作を停止したときから所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする
ことを特徴とするナビゲーション装置。
【請求項6】
請求項1記載のナビゲーション装置であって、
前記方位センサ制御手段は、
前記方位に基づく信号を記憶する記憶手段を備え、
前記主制御手段が動作しているとき、前記主制御手段に対し前記記憶手段に記憶した方位に基づく信号を出力する
ことを特徴とするナビゲーション装置。
【請求項7】
請求項1から6記載のナビゲーション装置であって、
前記方位センサは、車両に搭載され、当該車両の方位を検出し、
前記振動検知手段は、前記車両の振動を検知する
ことを特徴とするナビゲーション装置。
【請求項1】
方位に基づく信号を出力する方位センサと、
前記方位センサから出力された方位に基づく信号を取得する方位センサ制御手段と、
前記方位センサ制御手段から出力される方位に基づく信号を利用し、方位を算出する主制御手段と、
前記方位センサ制御手段に供給される電源のオンもしくはオフを切り替える電源切り替え手段と、
前記主制御手段が動作を停止しているときに、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする電源制御手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
振動を検知する振動検知手段を備え、
前記電源制御手段は、
前記振動検知手段が振動を検知したとき、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項2記載のナビゲーション装置であって、
前記電源制御手段は、
前記振動検知手段が振動を検知したとき、所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項4】
請求項3記載のナビゲーション装置であって、
前記電源制御手段は、
前記方位に基づく信号を取得し、
前記信号が前記方位の変化を示す場合、当該変化から所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項1記載のナビゲーション装置であって、
前記電源制御手段は、
前記主制御手段が動作を停止したときから所定時間の間、前記電源切り替え手段により前記方位センサ制御手段に供給される電源をオンにする
ことを特徴とするナビゲーション装置。
【請求項6】
請求項1記載のナビゲーション装置であって、
前記方位センサ制御手段は、
前記方位に基づく信号を記憶する記憶手段を備え、
前記主制御手段が動作しているとき、前記主制御手段に対し前記記憶手段に記憶した方位に基づく信号を出力する
ことを特徴とするナビゲーション装置。
【請求項7】
請求項1から6記載のナビゲーション装置であって、
前記方位センサは、車両に搭載され、当該車両の方位を検出し、
前記振動検知手段は、前記車両の振動を検知する
ことを特徴とするナビゲーション装置。
【図1】


【図2】
【図2】
【公開番号】特開2010−151759(P2010−151759A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−333002(P2008−333002)
【出願日】平成20年12月26日(2008.12.26)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月26日(2008.12.26)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]