
ナビゲーション装置
【課題】ある地点までの所要時間を報知するまでに要する時間を短縮することができるナビゲーション装置を提供すること。
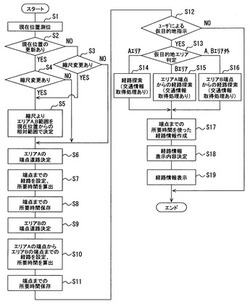
【解決手段】ナビゲーション装置100の情報処理装置1は、現在位置を検出して、その現在位置を含む所定の範囲を設定する(S1〜S3)。次に、現在位置から範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出して、その所要時間を経路毎にRAMやフラッシュメモリに保存する(S4〜S11)。その後、表示装置60に表示されている地図上における地点の指示を受けると、現在位置から指示を受け付けた地点までの経路を設定し、その経路における所要時間をRAMやフラッシュメモリに保存されている所要時間を用いて算出する(S12〜S16)。そして、保存されている所要時間を用いて算出された所要時間を表示装置60に表示することによって報知する(S17〜S19)。
【解決手段】ナビゲーション装置100の情報処理装置1は、現在位置を検出して、その現在位置を含む所定の範囲を設定する(S1〜S3)。次に、現在位置から範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出して、その所要時間を経路毎にRAMやフラッシュメモリに保存する(S4〜S11)。その後、表示装置60に表示されている地図上における地点の指示を受けると、現在位置から指示を受け付けた地点までの経路を設定し、その経路における所要時間をRAMやフラッシュメモリに保存されている所要時間を用いて算出する(S12〜S16)。そして、保存されている所要時間を用いて算出された所要時間を表示装置60に表示することによって報知する(S17〜S19)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、特許文献1に示されるナビゲーション装置があった。特許文献1に示されるナビゲーション装置は、操作入力部を介して未来または現在の時刻である指定時刻が入力されると、表示する地図の範囲を特定して、特定した範囲の地図データを地図データ記憶部から取得し、交通情報記憶部から指定時刻における交通情報を取得し、リンクと交通情報とを関連付けて表示部に表示させるものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183109号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、通常、ナビゲーション装置では、現在位置から目的地までの所要時間を調べたいとき、目的地を設定し、その目的地までの経路を探索する必要がある。また、目的地を設定する場合、目的地を施設一覧から検索したり、目的地の名称などを入力して検索したりする必要がある。このように、目的地を設定したり、目的地を設定してから経路を探索したりする分、現在位置からある地点までの所要時間が報知されるまでに時間がかかってしまうという問題があった。
【0005】
本発明は、上記問題点に鑑みなされたものであり、ある地点までの所要時間を報知するまでに要する時間を短縮することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために請求項1に記載のナビゲーション装置は、
自車両の現在位置を検出する現在位置検出手段と、
現在位置を含む地図を表示する地図表示手段と、
現在位置を含む所定の範囲を設定する範囲設定手段と、
現在位置から範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する第1所要時間算出手段と、
所要時間を経路毎に保存する保存手段と、
地図表示手段にて表示されている地図上における地点の指示を受け付ける指示受付手段と、
現在位置から指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を保存手段に保存されている所要時間を用いて算出する第2所要時間算出手段と、
第2所要時間算出手段にて算出された所要時間を報知する報知手段と、
を備えることを特徴とするものである。
【0007】
このように、現在位置から所定の範囲の端に達する経路の所要時間を予め計算して保存しておき、その保存しておいた所要時間を用いて現在位置から指示された地点までの所要時間を算出して報知することによって、所要時間が報知されるまでの時間を短縮することができる。
【0008】
また、請求項2に示すように、道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する交通情報取得手段を備え、第1所要時間算出手段及び第2所要時間算出手段は、交通情報取得手段にて取得した交通情報を考慮して所要時間を算出するようにしてもよい。
【0009】
このようにすることによって、より一層正確な所要時間を報知することができる。
【0010】
また、請求項3に示すように、報知手段は、第2所要時間算出手段にて算出された所要時間に加えて、交通情報取得手段にて取得した交通情報のうち第2所要時間算出手段にて設定された経路に対応する交通情報を報知するようにしてもよい。
【0011】
このようにすることによって、渋滞情報を報知することができる。
【0012】
また、請求項4に示すように、報知手段は、報知する内容を示す画像を表示するようにしてもよい。
【0013】
このようにすることによって、報知内容を認識しやすくすることができる。
【0014】
また、請求項5に示すように、報知手段は、第2所要時間算出手段にて設定された経路に対応する交通情報を示す画像を表示する場合、交通情報の対象地点と、現在位置と、指示受付手段にて受け付けた地点との位置関係を示す図面を表示するようにしてもよい。
【0015】
このようにすることによって、その中でどのあたりに渋滞があり、指示を受けた地点までにどれくらいかかるかを知らせることができる。
【0016】
また、請求項6に示すように、第2所要時間算出手段は、指示受付手段にて指示を受け付けた地点が範囲設定手段によって設定された範囲外であった場合、範囲の端に対応する道路上の地点から指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を算出して、保存手段に保存されている所要時間を用いて算出した所要時間に加算するようにしてもよい。
【0017】
このようにすることによって、設定された範囲外の地点であっても、予め算出しておいた所要時間を用いることによって、所要時間が報知されるまでの時間を短縮することができる。
【0018】
また、請求項7に示すように、
範囲設定手段は、広さの異なる複数の範囲を設定するものであり、
第1所要時間算出手段は、複数の範囲が設定されている場合、範囲設定手段にて最も狭く設定された範囲においては、現在位置から最も狭い範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、範囲設定手段にて他の範囲を囲うように設定された外側範囲においては、外側範囲が囲んでいる範囲の端に対応する道路上の地点から、外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、
保存手段は、範囲設定手段にて設定された範囲毎に、経路毎の所要時間を保存し、
第2所要時間算出手段は、現在位置から指示受付手段にて指示を受け付けた地点までの経路を設定すると共に、指示受付手段にて指示を受け付けた地点が含まれる範囲を検索し、その経路における所要時間を保存手段に保存されている所要時間のうち、検索された範囲に対応する所要時間を用いて算出するようにしてもよい。
【0019】
指示受付手段にて受け付ける地点の指示は、ユーザが行なうものであるため、毎回異なることが多い。つまり、ランダムに指示されることが多い。そこで、請求項7のように、複数の範囲を設定して、範囲の端に対応する道路上の地点から、外側の範囲の端に対応する道路上の地点までの所要時間を算出することによって、ランダムに地点を指示された場合であっても、所要時間が報知されるまでの時間が延長されることを抑制することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態におけるナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明の実施の形態におけるナビゲーション装置を含むネットワークの概略構成を示すブロック図である。
【図3】所要時間を計算する計算範囲(エリア)を説明するイメージ図であり、(a)は四角エリアの例であり、(b)は丸エリアの例である。
【図4】本発明の実施の形態におけるナビゲーション装置の表示例を示すイメージ図である。
【図5】本発明の実施の形態におけるナビゲーション装置の処理動作を示すフローチャートである。
【図6】本発明の実施の形態におけるナビゲーション装置の計算範囲(エリア)とエリア端点の例を示すイメージ図である。
【図7】本発明の実施の形態におけるナビゲーション装置のエリア端点までルート探索の例を示すイメージ図である。
【図8】本発明の実施の形態におけるナビゲーション装置のルート情報作成の例を示すイメージ図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を図に基づいて説明する。
【0022】
本実施の形態に係るナビゲーション装置100は、表示装置60に地図を表示しているときに、操作部50(タッチパネル)における表示している地図に対応する位置がタッチされると、現在位置からタッチした地点までの所要時間や交通情報などを表示装置60に表示することによって報知する特有の構成を有するものである。つまり、目的地を施設一覧から検索したり、目的地の名称などを入力して検索したりすることなく、また、目的地を設定してから経路を探索して所要時間を算出する時間(タイムラグ)を要することなく、現在位置から指示(タッチ)した地点までの所要時間を知ることができる。
【0023】
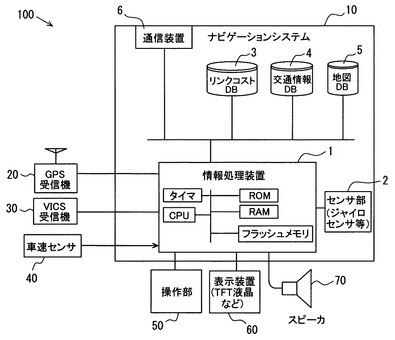
このナビゲーション装置100は、車両に搭載されるものであり、図1に示すように、ナビゲーションシステム10、GPS受信機20、VICS受信機30、車速センサ40、操作部50、表示装置60、スピーカ70などを備える。VICSは登録商標である。
【0024】
ナビゲーションシステム10(以下、ナビシステムとも称する)は、ナビゲーション装置100の制御部に相当するものであり、情報処理装置1、センサ部2、リンクコストデータベース3、交通情報データベース4、地図データベース5、通信装置6などを備える。
【0025】
情報処理装置1は、CPU、タイマ、ROM、RAM、フラッシュメモリなどを備えるコンピュータによって構成される。情報処理装置1(CPU)は、ROMに記憶されたプログラムに従い、外部(センサ部2、GPS受信機20、車速センサ40、地図データベース5など)からの信号やデータ、フラッシュメモリなどに記憶されたデータなどを用いつつ演算を行い、演算結果をRAMに一時的に記憶しながら各種処理を実行する。情報処理装置1が行う各種処理としては、画像表示処理、地図縮尺変更処理、目的地設定処理、経路探索処理、経路案内処理、現在位置特定処理、現在位置修正処理、音量調整処理等がある。
【0026】
また、情報処理装置1は、GPS受信機20からの情報に基づいて現在位置Mを検出する処理(現在位置検出手段)、地図データベース5からのデータに基づいて表示装置60に現在位置Mを含む地図を表示する処理(地図表示手段)、現在位置Mを含む所定の範囲を設定する処理(範囲設定手段)、現在位置Mからその範囲の端に対応する道路上の地点までの経路を設定しその経路における所要時間をリンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する処理(第1所要時間算出手段)、算出した所要時間を経路毎にRAMやフラッシュメモリに保存する処理(保存手段)と、操作部50にて表示装置60に表示されている地図上における地点の指示を受け付ける処理(指示受付手段)、現在位置Mから指示を受け付けた地点までの経路を設定し、その経路における所要時間をRAMやフラッシュメモリに保存されている所要時間を用いて算出する処理(第2所要時間算出手段)、算出された現在位置から指示を受け付けた地点までの所要時間を表示装置60にて報知する処理(報知手段)なども行なう。
【0027】
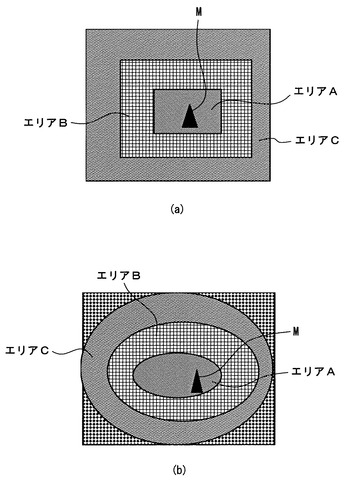
なお、現在位置Mを含む所定の範囲を設定する処理は、現在位置から指示した地点(操作部50を介してタッチした地図上の地点)までの所要時間をすばやく報知するために、予め車両の現在位置Mからの所要時間を算出する範囲である。
【0028】
この範囲は、例えば、図3(a)に示すように現在位置Mを中心に四角形の複数の範囲(エリアA、エリアB、エリアC)や、図3(b)に示すように現在位置Mを中心に丸形の複数の範囲(エリアA、エリアB、エリアC)が設定される。なお、本実施の形態においては、複数の範囲を設定する例を用いて説明するが、本発明はこれに限定されるものではなく、一つの範囲を設定するようにしてもよい。
【0029】
ただし、地点を指示するのはユーザであるため、毎回異なることが多い。つまり、ランダムに地点を指示されることが多い。そこで、上述のように、複数の範囲を設定して、範囲の端に対応する道路上の地点から、外側の範囲の端に対応する道路上の地点までの所要時間を算出することによって、ランダムに地点を指示された場合であっても、所要時間が報知されるまでの時間が延長されることを抑制することができる。
【0030】
なお、この範囲は、予め設定した範囲に固定してもよいし、地図の縮尺(表示レベル)により現在位置からの相対距離で変えても良い。なお、範囲を固定する場合、地図の縮尺が詳細のときは、広域での所要時間の計算をしない事で処理時間を短くするようにしても良い。
【0031】
また、この範囲は、移動予測時間に基づいて設定してもよい。この場合、地図の縮尺に応じて時間を決定する。例えば、詳細のときは5分間隔、広域のときは20分間隔のように設定してもよい。なお、丸形の場合は、範囲設定は、移動時間から距離だしを行うものとする。
【0032】
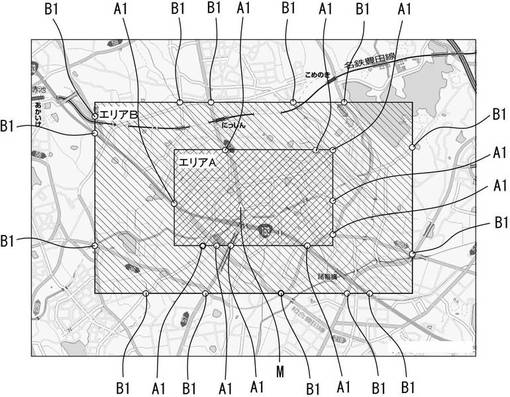
また、このように設定される範囲の端に対応する道路上の地点とは、範囲に含まれる道路と範囲の端が交差する地点である。この地点は、例えば、図6に示す例の場合、エリアAにおいては10箇所に設けられる地点A1、エリアBにおいては14箇所に設けられる地点B1である。なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0033】
また、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、ナビゲーション装置100が搭載されている車両が通る頻度が高い道路を含む経路を設定してもよい。ただし、この場合、ナビゲーション装置100は、自身が搭載されている車両が通った道路をカウントして頻度を求めて、フラッシュメモリなどに記憶しておく必要がある。
【0034】
また、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、経路コストが最も小さい経路を設定してもよい。
【0035】
さらに、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、現在位置Mから指示された地点までの距離に応じて対象道路種別を変更して設定してもよい。例えば、現在位置Mから指示された地点までの距離が100km未満の場合は幹線道路を対象として経路を設定し、現在位置Mから指示された地点までの距離が100kmを超える場合は幹線道路と高速道路とを対象として経路を設定するようにしてもよい。
【0036】
また、後ほど説明するが、ナビゲーション装置100は、センタ200から道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する(交通情報取得手段)構成を含む例を採用している。従って、情報処理装置1は、現在位置から指示された地点までの所要時間を算出する際に、取得した交通情報を用いるようにしてもよい。このようにすることによって、より一層正確な所要時間を報知することができる。
【0037】
センサ部2は、自立航法による車両位置、方位を検出するために、ジャイロセンサや加速度センサなどを備える。リンクコストデータベース(図中では、リンクコストDBと記す)3は、リンクコストを計算するための各ノード間のリンクのリンクコストを示すデータが記憶されている。交通情報データベース(図中では、交通情報DBと記す)4は、通信装置6を介してセンタ200から受信した交通情報として、渋滞度の程度を特定可能なデータとその渋滞の発生している道路区間を特定可能なデータなどが記憶されている。
【0038】
地図データベース(図中では、地図DBと記す)5は、地図表示のための地図データが記憶されたものである。地図データには、位置精度向上のためのマップマッチングデータ、道路片(リンク)および交差点(ノード)の位置情報や交差点と道路片との接続関係情報等を有する道路データ、施設の位置情報およびランドマークを有する施設データ等の各種データが含まれる。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0039】
通信装置6は、無線基地局などを介してセンタ200と通信できる機能を有しており、例えば携帯電話や自動車電話等の携帯端末から構成され、ナビシステム10に容易に着脱可能なように接続されている。もちろん、通信装置6をナビシステム10に容易に着脱できないように組み込んでもよい。
【0040】
GPS受信機20は、GPS衛星から送信される電波を受信し、車両の現在位置や向きを特定するための情報をナビシステム10に出力する。VICS受信機30は、VICSセンサユニットやFM多重放送受信機(何れも図示せず)などを備えたもので、例えばVICSセンサユニットがVICSセンタから受信した光/電波ビーコンなどによる道路交通情報やFM多重放送受信機が受信したFM多重放送からの道路交通情報をナビシステム10に出力する。車速センサ40は、車両の各転動輪の回転速度から速度を検出して、その速度を示す検出信号をナビシステム10に入力する。
【0041】
操作部50は、例えば表示装置60と一体になったタッチパネルを採用することができる。操作部50は、そのタッチパネルが操作されると、ナビシステム10へ各種処理(例えば、画像表示処理、地図縮尺変更処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置特定処理、現在位置修正処理、音量調整処理等)の実行を指示したり、各種情報を入力したりする。
【0042】
表示装置60は、ナビシステム10から入力される映像信号に応じて車両の走行を案内するための地図、案内経路、指示された地点までの所要時間を示す画像等を表示するナビゲーション画面表示などを行うものであって、フルカラー表示が可能なものであり、TFT液晶、有機EL、プラズマ等の表示画面を用いて構成することができる。
【0043】
スピーカ14は、ナビシステム10から入力される音声信号に応じた音声を出力する。例えば、所要時間など音声で出力することによって、報知するようにしてもよい。ただし、所要時間を示す画像を表示装置60に表示することによって報知する方が、報知内容を認識しやすくすることができる。
【0044】
また、本実施の形態におけるナビゲーション装置100は、算出された現在位置から指示を受け付けた地点までの所要時間を示す画像を表示装置60にて報知する場合、取得した交通情報を示す画像も表示装置60にて報知(報知手段)するようにしてもよい。このようにすることによって、渋滞情報を報知することができる。
【0045】
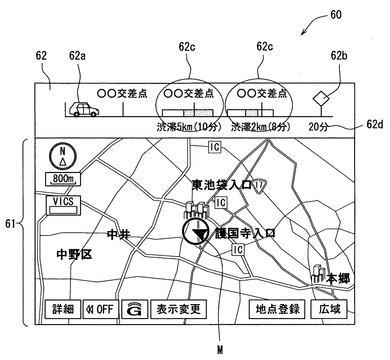
また、ナビゲーション装置100は、所要時間と交通情報を示す画像を表示装置60に表示する場合、図4に示すように、交通情報(渋滞)の対象地点と、現在位置と、指示された地点との位置関係を示す概略図62を表示するようにしてもよい。この図4に示す概略図62の一例では、所要時間を示す画像62dを表示すると共に、車両の現在位置Mを示す画像62a、指示された地点を示す画像62b、交通情報(渋滞)の対象地点を示す画像62cを交通情報(渋滞)の対象地点と、現在位置と、指示された地点との位置関係を示すように表示している。このようにすることによって、どのあたりに渋滞があり、指示した地点までどのくらいかかるかを知らせることができる。
【0046】
また、交通情報(渋滞)の対象地点を示す画像は、図4に示すように、渋滞の程度を示す画像、渋滞の起点となっている交差点名、渋滞の規模、渋滞を通過するのに要する時間などを含むようにしてもよい。このようにすることによって、渋滞を通過するのにどれくらいかかるかを知らせることもできる。
【0047】
また、この概略図62は、現在地から遠方になるにつれて縮尺比率を変えていってもよい。また、概略図62は、縮尺を徐々にあげて表示しても良い。また、概略図62は、現在位置から指示した地点までの距離により表示する交通渋滞の規模を変えて表示するようにしてもよい。例えば、距離が長い場合(例えば100km)は規模の小さい渋滞(例えば1km)は表示せず、規模の大きい渋滞(例えば10km)のみ表示する。
【0048】
なお、概略図は、図4に示すように、表示されている地図61とは別の位置に表示すると地図61が視認し辛くなることを抑制できて好ましい。
【0049】
さらに、報知(概略図62の表示など)は、操作部50(タッチパネル)における表示している地図に対応する位置がタッチされている間だけ出力されるようにしてもよい。
このようにすることによって、タッチする位置をかえた場合は、そのずらした位置に対応する報知(概略図62の表示など)が出力される。
【0050】
また、報知(概略図62の表示など)は、操作部50(タッチパネル)における表示している地図に対応する位置へのタッチ(操作)がなくなると、所定時間後(数秒後)に出力を停止されるようにしても良い。
【0051】
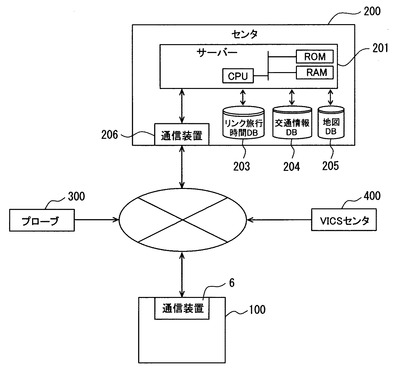
このような構成のナビゲーション装置100は、図2に示すように、ネットワークを介してセンタ200と通信接続される。
【0052】
センタ200は、複数のプローブ(複数の車両)から位置、速度等のプローブデータを収集して道路の渋滞の程度を示す交通情報を生成し、生成した交通情報を複数の車両に配信するものである。センタ200は、サーバー201、リンク旅行時間データベース203(図中では、リンク旅行時間DBと記す)、交通情報データベース204(図中では、交通情報DBと記す)、地図データベース205(図中では、地図DBと記す)、通信装置206などを備える。
【0053】
サーバー201は、通信装置206を介して、複数の車両に搭載されたナビゲーション装置100からプローブデータを収集して、そのプローブデータとリンク旅行時間データベース203及び地図データベース205に記憶されているデータを用いて道路の渋滞の程度を示す交通情報(渋滞度の程度を特定可能なデータと、その渋滞の発生している道路区間を特定可能なデータなどを含む)を生成する。そして、サーバー201は、生成した交通情報を交通情報データベース204に記憶する。また、サーバー201は、交通情報データベース204に記憶された交通情報を通信装置206を介して車両に搭載されたナビゲーション装置100に送信する。
【0054】
なお、リンク旅行時間データベース203は、リンクコストを計算するための各ノード間のリンクのリンクコストを示すデータが記憶されている。交通情報データベース204は、サーバー201によって生成された交通情報が記憶されている。地図データベース205は、地図表示のための地図データが記憶されたものである。地図データには、位置精度向上のためのマップマッチングデータ、道路片(リンク)および交差点(ノード)の位置情報や交差点と道路片との接続関係情報等を有する道路データ、施設の位置情報およびランドマークを有する施設データ等の各種データが含まれる。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0055】
また、通信装置206は、各車両(ナビゲーション装置100)と交信可能な無線基地局に通信回線を通じて接続されており、その無線基地局を介してナビゲーション装置100との間で無線通信を行う。
【0056】
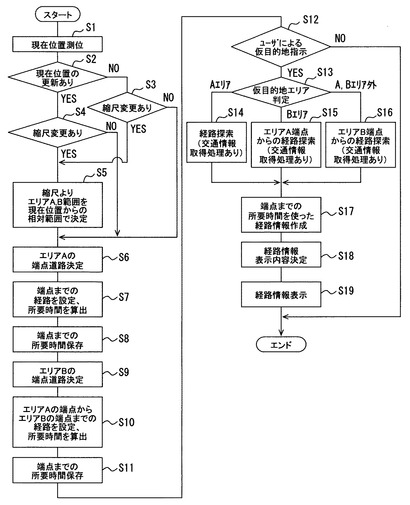
ここで、図6に基づいて、ナビゲーション装置100の処理動作に関して説明する。なお、この図6に示すフローチャートは、ナビゲーション装置100に電源が供給されるとスタートする。
【0057】
ステップS1では、情報処理装置1は、現在位置を測位(検出)する。つまり、情報処理装置1は、GPS受信機20からの情報に基づいて現在位置Mを検出する(現在位置検出手段)。その後、情報処理装置1は、地図データベース5からのデータに基づいて表示装置60に現在位置Mを含む地図を表示する(地図表示手段)。
【0058】
ステップS2では、情報処理装置1は、現在位置の更新があるか否かを判定する。そして、情報処理装置1は、現在位置Mが更新したか否かを判定して、更新ありと判定した場合はステップS4へ進み、更新なしと判定した場合はステップS3へ進む。
【0059】
ステップS3では、情報処理装置1は、表示装置60に表示している地図の縮尺に変更があったか否かを判定し、変更があったと判定した場合はステップS5へ進み、変更がなかったと判定した場合はステップS6へ進む。
【0060】
一方、ステップS4でも、情報処理装置1は、表示装置60に表示している地図の縮尺に変更があったか否かを判定し、変更があったと判定した場合はステップS5へ進み、変更がなかったと判定した場合はステップS6へ進む。
【0061】
ステップS5では、情報処理装置1は、縮尺より現在位置Mを含む所定の範囲を現在位置Mからの相対範囲で決定(設定)する(範囲設定手段)。ここで設定する範囲は、予め車両の現在位置Mからの所要時間を算出する範囲である。なお、ここでは、図6に示すように、エリアA、エリアBがステップS5の処理によって設定された例を採用する。このエリアAは、複数の範囲のうち最も狭い範囲であり、エリアBは、このエリアAを囲うエリアAよりも広い範囲である。
【0062】
ステップS6では、情報処理装置1は、エリアAの端点道路を決定(設定)する。つまり、情報処理装置1は、エリアAの端に対応する道路上の地点(図6のA1)を決定する(第1所要時間算出手段)。なお、本実施の形態に示すように、複数の範囲(エリアA、エリアB)が設定されている場合、ステップS6での処理は、最も狭く設定された範囲(ここでは、エリアA)においてなされるものである。
【0063】
なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0064】
なお、ステップS3、4にて縮尺の変更がないと判定された場合は、既に表示装置60に表示している地図の縮尺で範囲が設定されているので、その範囲でステップS6以降の処理を行なう。
【0065】
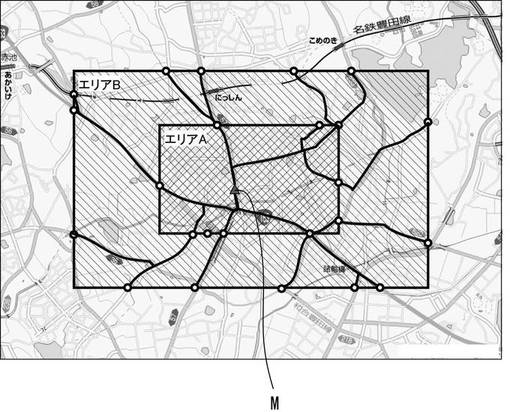
そして、ステップS7では、情報処理装置1は、端点までの経路を設定、所要時間を算出する。つまり、情報処理装置1は、現在位置MからステップS6で設定した地点までの経路(図7の太線)を設定し、その経路における所要時間を算出する(第1所要時間算出手段)。つまり、複数の範囲が設定されている場合、最も狭く設定された範囲においては、現在位置Mから最も狭い範囲(ここではエリアA)の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する。なお、所要時間を算出する際には、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する。また、所要時間の算出は、現在位置Mを中心に放射線状の広がる向きの経路のみを計算するようにしてもよい。
【0066】
ステップS8では、情報処理装置1は、ステップS7で算出した各地点(端点)への所要時間結果をRAMやフラッシュメモリに保存する(保存手段)。このとき、例えば、所要時間を経路毎にRAMやフラッシュメモリに保存する。
【0067】
次に、ステップS9では、情報処理装置1は、エリアBの端点道路を決定(設定)する。つまり、情報処理装置1は、エリアBの端に対応する道路上の地点(図6のB1)を決定する(第1所要時間算出手段)。なお、本実施の形態に示すように、複数の範囲(エリアA、エリアB)が設定されている場合、ステップS9での処理は、他の範囲(ここではエリアA)を囲うように設定された外側範囲(エリアB)においてなされるものである。
【0068】
なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0069】
そして、ステップS10では、情報処理装置1は、エリアAの端点からエリアBの端点までの経路(図7の太線)を設定、所要時間を算出する。つまり、情報処理装置1は、ステップS6で設定したで設定した地点からステップS9で設定した地点までの経路を設定し、その経路における所要時間を算出する(第1所要時間算出手段)。つまり、複数の範囲が設定されている場合、他の範囲を囲うように設定された外側範囲においては、外側範囲が囲んでいる範囲の端に対応する道路上の地点から、外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する。なお、所要時間を算出する際には、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する。また、所要時間の算出は、現在位置Mを中心に放射線状の広がる向きの経路のみを計算するようにしてもよい。
【0070】
ステップS11では、情報処理装置1は、ステップS7で算出した各地点(端点)への所要時間結果をRAMやフラッシュメモリに保存する(保存手段)。このとき、例えば、所要時間を経路毎にRAMやフラッシュメモリに保存する。
【0071】
ステップS12では、情報処理装置1は、ユーザによる仮目的地指示を判定する。これは、操作部50にて表示装置60に表示されている地図上における地点のユーザからの指示を受け付ける処理である(指示受付手段)。つまり、操作部50(タッチパネル)における表示装置60に表示している地図に対応する位置がユーザによってタッチされたか否かを判定する。そして、表示装置60に表示されている地図上におけるユーザからの地点の指示があると判定した場合は、ステップS13へ進み、指示がないと判定した場合は処理を終了する。
【0072】
ステップS13では、情報処理装置1は、仮目的地(ユーザがタッチした地点)が含まれるエリアを判定する。そして、ユーザがタッチした地点がエリアAの場合はステップS14へ進み、ユーザがタッチした地点がエリアBの場合はステップS15へ進み、ユーザがタッチした地点がエリアA、エリアB以外の場合はステップS16へ進む。なお、範囲(エリア)が一つしか設定されてない場合は、ユーザがタッチした地点が範囲内か否かの判定を行なう。
【0073】
ステップS14では、情報処理装置1は、現在位置Mから指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する。その後、設定した経路における所要時間をRAMやフラッシュメモリに保存されている所要時間、必要に応じて交通情報データベース4に記憶されている交通情報を用いて算出する(第2所要時間算出手段)。つまり、ステップS7で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。
【0074】
また、例えば、現在位置Mや仮目的地がステップS6で地点を求めるために採用した道路(例えば、幹線道)にない場合は、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を設定して、その経路の所要時間を算出し、RAMやフラッシュメモリに保存されている所要時間に加算してもよい。また、現在位置Mや仮目的地がステップS6で地点を求めるために採用した道路(例えば、幹線道)にない場合は、現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を計算はしないことで処理時間を短縮しても良い。
【0075】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0076】
ステップS15では、情報処理装置1は、エリアAの端点(ステップS6で設定した地点)から指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する。その後、設定した経路における所要時間をRAMやフラッシュメモリに保存されている所要時間、必要に応じて交通情報データベース4に記憶されている交通情報を用いて算出する(第2所要時間算出手段)。つまり、ステップS7、ステップS10で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。
【0077】
また、例えば、現在位置Mや仮目的地がステップS9で地点を求めるために採用した道路(例えば、幹線道)にない場合は、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を設定して、その経路の所要時間を算出し、RAMやフラッシュメモリに保存されている所要時間に加算してもよい。また、現在位置Mや仮目的地がステップS9で地点を求めるために採用した道路(例えば、幹線道)にない場合は、現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を計算はしないことで処理時間を短縮しても良い。
【0078】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0079】
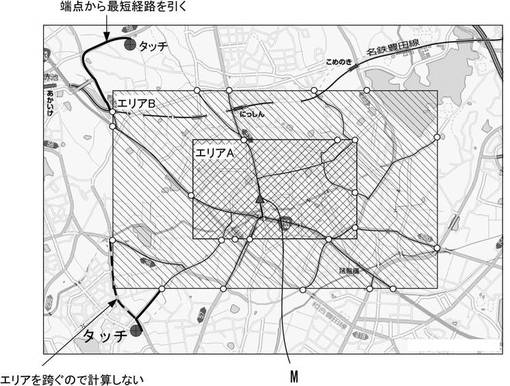
ステップS16では、情報処理装置1は、エリアBの端点(ステップS9で設定した地点)から指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する(図8の太線)。その後、設定した経路における所要時間をリンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出して、RAMやフラッシュメモリに保存されている所要時間を用いて算出した現在位置MからエリアBの端点までの所要時間に加算する(第2所要時間算出手段)。つまり、ステップS7、ステップS10で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。なお、このとき、必要に応じて交通情報データベース4に記憶されている交通情報を適用して算出してもよい。
【0080】
このようにすることによって、設定された範囲外の地点を指示(タッチ)された場合であっても、予め算出しておいた所要時間を用いることによって、所要時間が報知されるまでの時間を短縮することができる。
【0081】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0082】
なお、図8に示すように、狭い方の範囲の端点から広い方の範囲の端点への経路を計算する際、道路が狭い範囲にまたがる道路は、その道路以降の計算をしないようにしても良い。
【0083】
ステップS17では、情報処理装置1は、ステップS14〜16で算出した所要時間を使った経路情報を作成する。この経路情報は、上述の所要時間、交通情報(渋滞情報など)を含む概略図に相当するものである。
【0084】
ステップS18では、情報処理装置1は、経路情報の表示内容を決定する。例えば、表示装置60に表示している地図の縮尺に合わせて表示内容を決定する。
【0085】
ステップS19では、情報処理装置1は、経路情報を表示装置60に表示させることによって報知する(報知手段)。つまり、算出された現在位置Mから指示を受け付けた地点までの所要時間、交通情報などを表示装置60に表示させることによって報知する。なお、表示装置60に経路情報を表示する際に、現在位置Mから指示を受け付けた地点までの経路を表示するようにしてもよい。
【0086】
なお、所用時間や交通情報は、表示装置60に表示することによって報知するほかにも、スピーカから音声で出力することによって報知してもよい。
【0087】
このように、現在位置Mから所定の範囲の端に達する経路の所要時間を予め計算して保存しておき、その保存しておいた所要時間を用いて現在位置Mから指示された地点までの所要時間を算出して報知することによって、所要時間が報知されるまでの時間を短縮することができる。また、現在位置から所定の範囲の端に達する経路の所要時間を予め計算して保存しておくことによって、処理負荷の集中を回避し表示装置60への表示速度を向上(応答性をよく)することができる。
【0088】
このように、所要時間が報知されるまでの時間を短縮することができるので、特定の目的地が決まっておらず、仮目的地が複数ある場合に好適である。つまり、ユーザは、表示装置60に表示されている地図上の任意の地点(仮目的地)をタッチするだけで、その地点までの所要時間を知ることが出来る。そして、このようなタッチ操作を繰り返し行なって、実際に向かう目的地を決めることができる。
【符号の説明】
【0089】
1 情報処理装置、2 センサ部、3 リンクコストDB(リンクコストデータベース)、4 交通情報DB(交通情報データベース)、5 地図DB(地図データベース)、6 通信装置、10 ナビゲーションシステム、20 GPS受信機、30 VICS受信機、40 車速センサ、50 操作部、60 表示装置、70 スピーカ、100 ナビゲーション装置、200 センタ、300 プローブ、400 VICSセンタ
【技術分野】
【0001】
本発明は、ナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、特許文献1に示されるナビゲーション装置があった。特許文献1に示されるナビゲーション装置は、操作入力部を介して未来または現在の時刻である指定時刻が入力されると、表示する地図の範囲を特定して、特定した範囲の地図データを地図データ記憶部から取得し、交通情報記憶部から指定時刻における交通情報を取得し、リンクと交通情報とを関連付けて表示部に表示させるものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183109号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、通常、ナビゲーション装置では、現在位置から目的地までの所要時間を調べたいとき、目的地を設定し、その目的地までの経路を探索する必要がある。また、目的地を設定する場合、目的地を施設一覧から検索したり、目的地の名称などを入力して検索したりする必要がある。このように、目的地を設定したり、目的地を設定してから経路を探索したりする分、現在位置からある地点までの所要時間が報知されるまでに時間がかかってしまうという問題があった。
【0005】
本発明は、上記問題点に鑑みなされたものであり、ある地点までの所要時間を報知するまでに要する時間を短縮することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために請求項1に記載のナビゲーション装置は、
自車両の現在位置を検出する現在位置検出手段と、
現在位置を含む地図を表示する地図表示手段と、
現在位置を含む所定の範囲を設定する範囲設定手段と、
現在位置から範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する第1所要時間算出手段と、
所要時間を経路毎に保存する保存手段と、
地図表示手段にて表示されている地図上における地点の指示を受け付ける指示受付手段と、
現在位置から指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を保存手段に保存されている所要時間を用いて算出する第2所要時間算出手段と、
第2所要時間算出手段にて算出された所要時間を報知する報知手段と、
を備えることを特徴とするものである。
【0007】
このように、現在位置から所定の範囲の端に達する経路の所要時間を予め計算して保存しておき、その保存しておいた所要時間を用いて現在位置から指示された地点までの所要時間を算出して報知することによって、所要時間が報知されるまでの時間を短縮することができる。
【0008】
また、請求項2に示すように、道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する交通情報取得手段を備え、第1所要時間算出手段及び第2所要時間算出手段は、交通情報取得手段にて取得した交通情報を考慮して所要時間を算出するようにしてもよい。
【0009】
このようにすることによって、より一層正確な所要時間を報知することができる。
【0010】
また、請求項3に示すように、報知手段は、第2所要時間算出手段にて算出された所要時間に加えて、交通情報取得手段にて取得した交通情報のうち第2所要時間算出手段にて設定された経路に対応する交通情報を報知するようにしてもよい。
【0011】
このようにすることによって、渋滞情報を報知することができる。
【0012】
また、請求項4に示すように、報知手段は、報知する内容を示す画像を表示するようにしてもよい。
【0013】
このようにすることによって、報知内容を認識しやすくすることができる。
【0014】
また、請求項5に示すように、報知手段は、第2所要時間算出手段にて設定された経路に対応する交通情報を示す画像を表示する場合、交通情報の対象地点と、現在位置と、指示受付手段にて受け付けた地点との位置関係を示す図面を表示するようにしてもよい。
【0015】
このようにすることによって、その中でどのあたりに渋滞があり、指示を受けた地点までにどれくらいかかるかを知らせることができる。
【0016】
また、請求項6に示すように、第2所要時間算出手段は、指示受付手段にて指示を受け付けた地点が範囲設定手段によって設定された範囲外であった場合、範囲の端に対応する道路上の地点から指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を算出して、保存手段に保存されている所要時間を用いて算出した所要時間に加算するようにしてもよい。
【0017】
このようにすることによって、設定された範囲外の地点であっても、予め算出しておいた所要時間を用いることによって、所要時間が報知されるまでの時間を短縮することができる。
【0018】
また、請求項7に示すように、
範囲設定手段は、広さの異なる複数の範囲を設定するものであり、
第1所要時間算出手段は、複数の範囲が設定されている場合、範囲設定手段にて最も狭く設定された範囲においては、現在位置から最も狭い範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、範囲設定手段にて他の範囲を囲うように設定された外側範囲においては、外側範囲が囲んでいる範囲の端に対応する道路上の地点から、外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、
保存手段は、範囲設定手段にて設定された範囲毎に、経路毎の所要時間を保存し、
第2所要時間算出手段は、現在位置から指示受付手段にて指示を受け付けた地点までの経路を設定すると共に、指示受付手段にて指示を受け付けた地点が含まれる範囲を検索し、その経路における所要時間を保存手段に保存されている所要時間のうち、検索された範囲に対応する所要時間を用いて算出するようにしてもよい。
【0019】
指示受付手段にて受け付ける地点の指示は、ユーザが行なうものであるため、毎回異なることが多い。つまり、ランダムに指示されることが多い。そこで、請求項7のように、複数の範囲を設定して、範囲の端に対応する道路上の地点から、外側の範囲の端に対応する道路上の地点までの所要時間を算出することによって、ランダムに地点を指示された場合であっても、所要時間が報知されるまでの時間が延長されることを抑制することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態におけるナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明の実施の形態におけるナビゲーション装置を含むネットワークの概略構成を示すブロック図である。
【図3】所要時間を計算する計算範囲(エリア)を説明するイメージ図であり、(a)は四角エリアの例であり、(b)は丸エリアの例である。
【図4】本発明の実施の形態におけるナビゲーション装置の表示例を示すイメージ図である。
【図5】本発明の実施の形態におけるナビゲーション装置の処理動作を示すフローチャートである。
【図6】本発明の実施の形態におけるナビゲーション装置の計算範囲(エリア)とエリア端点の例を示すイメージ図である。
【図7】本発明の実施の形態におけるナビゲーション装置のエリア端点までルート探索の例を示すイメージ図である。
【図8】本発明の実施の形態におけるナビゲーション装置のルート情報作成の例を示すイメージ図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態を図に基づいて説明する。
【0022】
本実施の形態に係るナビゲーション装置100は、表示装置60に地図を表示しているときに、操作部50(タッチパネル)における表示している地図に対応する位置がタッチされると、現在位置からタッチした地点までの所要時間や交通情報などを表示装置60に表示することによって報知する特有の構成を有するものである。つまり、目的地を施設一覧から検索したり、目的地の名称などを入力して検索したりすることなく、また、目的地を設定してから経路を探索して所要時間を算出する時間(タイムラグ)を要することなく、現在位置から指示(タッチ)した地点までの所要時間を知ることができる。
【0023】
このナビゲーション装置100は、車両に搭載されるものであり、図1に示すように、ナビゲーションシステム10、GPS受信機20、VICS受信機30、車速センサ40、操作部50、表示装置60、スピーカ70などを備える。VICSは登録商標である。
【0024】
ナビゲーションシステム10(以下、ナビシステムとも称する)は、ナビゲーション装置100の制御部に相当するものであり、情報処理装置1、センサ部2、リンクコストデータベース3、交通情報データベース4、地図データベース5、通信装置6などを備える。
【0025】
情報処理装置1は、CPU、タイマ、ROM、RAM、フラッシュメモリなどを備えるコンピュータによって構成される。情報処理装置1(CPU)は、ROMに記憶されたプログラムに従い、外部(センサ部2、GPS受信機20、車速センサ40、地図データベース5など)からの信号やデータ、フラッシュメモリなどに記憶されたデータなどを用いつつ演算を行い、演算結果をRAMに一時的に記憶しながら各種処理を実行する。情報処理装置1が行う各種処理としては、画像表示処理、地図縮尺変更処理、目的地設定処理、経路探索処理、経路案内処理、現在位置特定処理、現在位置修正処理、音量調整処理等がある。
【0026】
また、情報処理装置1は、GPS受信機20からの情報に基づいて現在位置Mを検出する処理(現在位置検出手段)、地図データベース5からのデータに基づいて表示装置60に現在位置Mを含む地図を表示する処理(地図表示手段)、現在位置Mを含む所定の範囲を設定する処理(範囲設定手段)、現在位置Mからその範囲の端に対応する道路上の地点までの経路を設定しその経路における所要時間をリンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する処理(第1所要時間算出手段)、算出した所要時間を経路毎にRAMやフラッシュメモリに保存する処理(保存手段)と、操作部50にて表示装置60に表示されている地図上における地点の指示を受け付ける処理(指示受付手段)、現在位置Mから指示を受け付けた地点までの経路を設定し、その経路における所要時間をRAMやフラッシュメモリに保存されている所要時間を用いて算出する処理(第2所要時間算出手段)、算出された現在位置から指示を受け付けた地点までの所要時間を表示装置60にて報知する処理(報知手段)なども行なう。
【0027】
なお、現在位置Mを含む所定の範囲を設定する処理は、現在位置から指示した地点(操作部50を介してタッチした地図上の地点)までの所要時間をすばやく報知するために、予め車両の現在位置Mからの所要時間を算出する範囲である。
【0028】
この範囲は、例えば、図3(a)に示すように現在位置Mを中心に四角形の複数の範囲(エリアA、エリアB、エリアC)や、図3(b)に示すように現在位置Mを中心に丸形の複数の範囲(エリアA、エリアB、エリアC)が設定される。なお、本実施の形態においては、複数の範囲を設定する例を用いて説明するが、本発明はこれに限定されるものではなく、一つの範囲を設定するようにしてもよい。
【0029】
ただし、地点を指示するのはユーザであるため、毎回異なることが多い。つまり、ランダムに地点を指示されることが多い。そこで、上述のように、複数の範囲を設定して、範囲の端に対応する道路上の地点から、外側の範囲の端に対応する道路上の地点までの所要時間を算出することによって、ランダムに地点を指示された場合であっても、所要時間が報知されるまでの時間が延長されることを抑制することができる。
【0030】
なお、この範囲は、予め設定した範囲に固定してもよいし、地図の縮尺(表示レベル)により現在位置からの相対距離で変えても良い。なお、範囲を固定する場合、地図の縮尺が詳細のときは、広域での所要時間の計算をしない事で処理時間を短くするようにしても良い。
【0031】
また、この範囲は、移動予測時間に基づいて設定してもよい。この場合、地図の縮尺に応じて時間を決定する。例えば、詳細のときは5分間隔、広域のときは20分間隔のように設定してもよい。なお、丸形の場合は、範囲設定は、移動時間から距離だしを行うものとする。
【0032】
また、このように設定される範囲の端に対応する道路上の地点とは、範囲に含まれる道路と範囲の端が交差する地点である。この地点は、例えば、図6に示す例の場合、エリアAにおいては10箇所に設けられる地点A1、エリアBにおいては14箇所に設けられる地点B1である。なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0033】
また、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、ナビゲーション装置100が搭載されている車両が通る頻度が高い道路を含む経路を設定してもよい。ただし、この場合、ナビゲーション装置100は、自身が搭載されている車両が通った道路をカウントして頻度を求めて、フラッシュメモリなどに記憶しておく必要がある。
【0034】
また、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、経路コストが最も小さい経路を設定してもよい。
【0035】
さらに、情報処理装置1は、現在位置Mから範囲の端に対応する道路上の地点までの経路を設定する場合、現在位置Mから指示された地点までの距離に応じて対象道路種別を変更して設定してもよい。例えば、現在位置Mから指示された地点までの距離が100km未満の場合は幹線道路を対象として経路を設定し、現在位置Mから指示された地点までの距離が100kmを超える場合は幹線道路と高速道路とを対象として経路を設定するようにしてもよい。
【0036】
また、後ほど説明するが、ナビゲーション装置100は、センタ200から道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する(交通情報取得手段)構成を含む例を採用している。従って、情報処理装置1は、現在位置から指示された地点までの所要時間を算出する際に、取得した交通情報を用いるようにしてもよい。このようにすることによって、より一層正確な所要時間を報知することができる。
【0037】
センサ部2は、自立航法による車両位置、方位を検出するために、ジャイロセンサや加速度センサなどを備える。リンクコストデータベース(図中では、リンクコストDBと記す)3は、リンクコストを計算するための各ノード間のリンクのリンクコストを示すデータが記憶されている。交通情報データベース(図中では、交通情報DBと記す)4は、通信装置6を介してセンタ200から受信した交通情報として、渋滞度の程度を特定可能なデータとその渋滞の発生している道路区間を特定可能なデータなどが記憶されている。
【0038】
地図データベース(図中では、地図DBと記す)5は、地図表示のための地図データが記憶されたものである。地図データには、位置精度向上のためのマップマッチングデータ、道路片(リンク)および交差点(ノード)の位置情報や交差点と道路片との接続関係情報等を有する道路データ、施設の位置情報およびランドマークを有する施設データ等の各種データが含まれる。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0039】
通信装置6は、無線基地局などを介してセンタ200と通信できる機能を有しており、例えば携帯電話や自動車電話等の携帯端末から構成され、ナビシステム10に容易に着脱可能なように接続されている。もちろん、通信装置6をナビシステム10に容易に着脱できないように組み込んでもよい。
【0040】
GPS受信機20は、GPS衛星から送信される電波を受信し、車両の現在位置や向きを特定するための情報をナビシステム10に出力する。VICS受信機30は、VICSセンサユニットやFM多重放送受信機(何れも図示せず)などを備えたもので、例えばVICSセンサユニットがVICSセンタから受信した光/電波ビーコンなどによる道路交通情報やFM多重放送受信機が受信したFM多重放送からの道路交通情報をナビシステム10に出力する。車速センサ40は、車両の各転動輪の回転速度から速度を検出して、その速度を示す検出信号をナビシステム10に入力する。
【0041】
操作部50は、例えば表示装置60と一体になったタッチパネルを採用することができる。操作部50は、そのタッチパネルが操作されると、ナビシステム10へ各種処理(例えば、画像表示処理、地図縮尺変更処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置特定処理、現在位置修正処理、音量調整処理等)の実行を指示したり、各種情報を入力したりする。
【0042】
表示装置60は、ナビシステム10から入力される映像信号に応じて車両の走行を案内するための地図、案内経路、指示された地点までの所要時間を示す画像等を表示するナビゲーション画面表示などを行うものであって、フルカラー表示が可能なものであり、TFT液晶、有機EL、プラズマ等の表示画面を用いて構成することができる。
【0043】
スピーカ14は、ナビシステム10から入力される音声信号に応じた音声を出力する。例えば、所要時間など音声で出力することによって、報知するようにしてもよい。ただし、所要時間を示す画像を表示装置60に表示することによって報知する方が、報知内容を認識しやすくすることができる。
【0044】
また、本実施の形態におけるナビゲーション装置100は、算出された現在位置から指示を受け付けた地点までの所要時間を示す画像を表示装置60にて報知する場合、取得した交通情報を示す画像も表示装置60にて報知(報知手段)するようにしてもよい。このようにすることによって、渋滞情報を報知することができる。
【0045】
また、ナビゲーション装置100は、所要時間と交通情報を示す画像を表示装置60に表示する場合、図4に示すように、交通情報(渋滞)の対象地点と、現在位置と、指示された地点との位置関係を示す概略図62を表示するようにしてもよい。この図4に示す概略図62の一例では、所要時間を示す画像62dを表示すると共に、車両の現在位置Mを示す画像62a、指示された地点を示す画像62b、交通情報(渋滞)の対象地点を示す画像62cを交通情報(渋滞)の対象地点と、現在位置と、指示された地点との位置関係を示すように表示している。このようにすることによって、どのあたりに渋滞があり、指示した地点までどのくらいかかるかを知らせることができる。
【0046】
また、交通情報(渋滞)の対象地点を示す画像は、図4に示すように、渋滞の程度を示す画像、渋滞の起点となっている交差点名、渋滞の規模、渋滞を通過するのに要する時間などを含むようにしてもよい。このようにすることによって、渋滞を通過するのにどれくらいかかるかを知らせることもできる。
【0047】
また、この概略図62は、現在地から遠方になるにつれて縮尺比率を変えていってもよい。また、概略図62は、縮尺を徐々にあげて表示しても良い。また、概略図62は、現在位置から指示した地点までの距離により表示する交通渋滞の規模を変えて表示するようにしてもよい。例えば、距離が長い場合(例えば100km)は規模の小さい渋滞(例えば1km)は表示せず、規模の大きい渋滞(例えば10km)のみ表示する。
【0048】
なお、概略図は、図4に示すように、表示されている地図61とは別の位置に表示すると地図61が視認し辛くなることを抑制できて好ましい。
【0049】
さらに、報知(概略図62の表示など)は、操作部50(タッチパネル)における表示している地図に対応する位置がタッチされている間だけ出力されるようにしてもよい。
このようにすることによって、タッチする位置をかえた場合は、そのずらした位置に対応する報知(概略図62の表示など)が出力される。
【0050】
また、報知(概略図62の表示など)は、操作部50(タッチパネル)における表示している地図に対応する位置へのタッチ(操作)がなくなると、所定時間後(数秒後)に出力を停止されるようにしても良い。
【0051】
このような構成のナビゲーション装置100は、図2に示すように、ネットワークを介してセンタ200と通信接続される。
【0052】
センタ200は、複数のプローブ(複数の車両)から位置、速度等のプローブデータを収集して道路の渋滞の程度を示す交通情報を生成し、生成した交通情報を複数の車両に配信するものである。センタ200は、サーバー201、リンク旅行時間データベース203(図中では、リンク旅行時間DBと記す)、交通情報データベース204(図中では、交通情報DBと記す)、地図データベース205(図中では、地図DBと記す)、通信装置206などを備える。
【0053】
サーバー201は、通信装置206を介して、複数の車両に搭載されたナビゲーション装置100からプローブデータを収集して、そのプローブデータとリンク旅行時間データベース203及び地図データベース205に記憶されているデータを用いて道路の渋滞の程度を示す交通情報(渋滞度の程度を特定可能なデータと、その渋滞の発生している道路区間を特定可能なデータなどを含む)を生成する。そして、サーバー201は、生成した交通情報を交通情報データベース204に記憶する。また、サーバー201は、交通情報データベース204に記憶された交通情報を通信装置206を介して車両に搭載されたナビゲーション装置100に送信する。
【0054】
なお、リンク旅行時間データベース203は、リンクコストを計算するための各ノード間のリンクのリンクコストを示すデータが記憶されている。交通情報データベース204は、サーバー201によって生成された交通情報が記憶されている。地図データベース205は、地図表示のための地図データが記憶されたものである。地図データには、位置精度向上のためのマップマッチングデータ、道路片(リンク)および交差点(ノード)の位置情報や交差点と道路片との接続関係情報等を有する道路データ、施設の位置情報およびランドマークを有する施設データ等の各種データが含まれる。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0055】
また、通信装置206は、各車両(ナビゲーション装置100)と交信可能な無線基地局に通信回線を通じて接続されており、その無線基地局を介してナビゲーション装置100との間で無線通信を行う。
【0056】
ここで、図6に基づいて、ナビゲーション装置100の処理動作に関して説明する。なお、この図6に示すフローチャートは、ナビゲーション装置100に電源が供給されるとスタートする。
【0057】
ステップS1では、情報処理装置1は、現在位置を測位(検出)する。つまり、情報処理装置1は、GPS受信機20からの情報に基づいて現在位置Mを検出する(現在位置検出手段)。その後、情報処理装置1は、地図データベース5からのデータに基づいて表示装置60に現在位置Mを含む地図を表示する(地図表示手段)。
【0058】
ステップS2では、情報処理装置1は、現在位置の更新があるか否かを判定する。そして、情報処理装置1は、現在位置Mが更新したか否かを判定して、更新ありと判定した場合はステップS4へ進み、更新なしと判定した場合はステップS3へ進む。
【0059】
ステップS3では、情報処理装置1は、表示装置60に表示している地図の縮尺に変更があったか否かを判定し、変更があったと判定した場合はステップS5へ進み、変更がなかったと判定した場合はステップS6へ進む。
【0060】
一方、ステップS4でも、情報処理装置1は、表示装置60に表示している地図の縮尺に変更があったか否かを判定し、変更があったと判定した場合はステップS5へ進み、変更がなかったと判定した場合はステップS6へ進む。
【0061】
ステップS5では、情報処理装置1は、縮尺より現在位置Mを含む所定の範囲を現在位置Mからの相対範囲で決定(設定)する(範囲設定手段)。ここで設定する範囲は、予め車両の現在位置Mからの所要時間を算出する範囲である。なお、ここでは、図6に示すように、エリアA、エリアBがステップS5の処理によって設定された例を採用する。このエリアAは、複数の範囲のうち最も狭い範囲であり、エリアBは、このエリアAを囲うエリアAよりも広い範囲である。
【0062】
ステップS6では、情報処理装置1は、エリアAの端点道路を決定(設定)する。つまり、情報処理装置1は、エリアAの端に対応する道路上の地点(図6のA1)を決定する(第1所要時間算出手段)。なお、本実施の形態に示すように、複数の範囲(エリアA、エリアB)が設定されている場合、ステップS6での処理は、最も狭く設定された範囲(ここでは、エリアA)においてなされるものである。
【0063】
なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0064】
なお、ステップS3、4にて縮尺の変更がないと判定された場合は、既に表示装置60に表示している地図の縮尺で範囲が設定されているので、その範囲でステップS6以降の処理を行なう。
【0065】
そして、ステップS7では、情報処理装置1は、端点までの経路を設定、所要時間を算出する。つまり、情報処理装置1は、現在位置MからステップS6で設定した地点までの経路(図7の太線)を設定し、その経路における所要時間を算出する(第1所要時間算出手段)。つまり、複数の範囲が設定されている場合、最も狭く設定された範囲においては、現在位置Mから最も狭い範囲(ここではエリアA)の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する。なお、所要時間を算出する際には、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する。また、所要時間の算出は、現在位置Mを中心に放射線状の広がる向きの経路のみを計算するようにしてもよい。
【0066】
ステップS8では、情報処理装置1は、ステップS7で算出した各地点(端点)への所要時間結果をRAMやフラッシュメモリに保存する(保存手段)。このとき、例えば、所要時間を経路毎にRAMやフラッシュメモリに保存する。
【0067】
次に、ステップS9では、情報処理装置1は、エリアBの端点道路を決定(設定)する。つまり、情報処理装置1は、エリアBの端に対応する道路上の地点(図6のB1)を決定する(第1所要時間算出手段)。なお、本実施の形態に示すように、複数の範囲(エリアA、エリアB)が設定されている場合、ステップS9での処理は、他の範囲(ここではエリアA)を囲うように設定された外側範囲(エリアB)においてなされるものである。
【0068】
なお、この地点は、範囲に含まれる全ての道路と範囲の端が交差する地点を用いてもいいし、範囲に含まれる幹線道路などの特定の道路と範囲の端が交差する地点を用いてもよいし、表示されている地図レベルの道路と範囲の端が交差する地点を用いてもよい。
【0069】
そして、ステップS10では、情報処理装置1は、エリアAの端点からエリアBの端点までの経路(図7の太線)を設定、所要時間を算出する。つまり、情報処理装置1は、ステップS6で設定したで設定した地点からステップS9で設定した地点までの経路を設定し、その経路における所要時間を算出する(第1所要時間算出手段)。つまり、複数の範囲が設定されている場合、他の範囲を囲うように設定された外側範囲においては、外側範囲が囲んでいる範囲の端に対応する道路上の地点から、外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する。なお、所要時間を算出する際には、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出する。また、所要時間の算出は、現在位置Mを中心に放射線状の広がる向きの経路のみを計算するようにしてもよい。
【0070】
ステップS11では、情報処理装置1は、ステップS7で算出した各地点(端点)への所要時間結果をRAMやフラッシュメモリに保存する(保存手段)。このとき、例えば、所要時間を経路毎にRAMやフラッシュメモリに保存する。
【0071】
ステップS12では、情報処理装置1は、ユーザによる仮目的地指示を判定する。これは、操作部50にて表示装置60に表示されている地図上における地点のユーザからの指示を受け付ける処理である(指示受付手段)。つまり、操作部50(タッチパネル)における表示装置60に表示している地図に対応する位置がユーザによってタッチされたか否かを判定する。そして、表示装置60に表示されている地図上におけるユーザからの地点の指示があると判定した場合は、ステップS13へ進み、指示がないと判定した場合は処理を終了する。
【0072】
ステップS13では、情報処理装置1は、仮目的地(ユーザがタッチした地点)が含まれるエリアを判定する。そして、ユーザがタッチした地点がエリアAの場合はステップS14へ進み、ユーザがタッチした地点がエリアBの場合はステップS15へ進み、ユーザがタッチした地点がエリアA、エリアB以外の場合はステップS16へ進む。なお、範囲(エリア)が一つしか設定されてない場合は、ユーザがタッチした地点が範囲内か否かの判定を行なう。
【0073】
ステップS14では、情報処理装置1は、現在位置Mから指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する。その後、設定した経路における所要時間をRAMやフラッシュメモリに保存されている所要時間、必要に応じて交通情報データベース4に記憶されている交通情報を用いて算出する(第2所要時間算出手段)。つまり、ステップS7で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。
【0074】
また、例えば、現在位置Mや仮目的地がステップS6で地点を求めるために採用した道路(例えば、幹線道)にない場合は、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を設定して、その経路の所要時間を算出し、RAMやフラッシュメモリに保存されている所要時間に加算してもよい。また、現在位置Mや仮目的地がステップS6で地点を求めるために採用した道路(例えば、幹線道)にない場合は、現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を計算はしないことで処理時間を短縮しても良い。
【0075】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0076】
ステップS15では、情報処理装置1は、エリアAの端点(ステップS6で設定した地点)から指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する。その後、設定した経路における所要時間をRAMやフラッシュメモリに保存されている所要時間、必要に応じて交通情報データベース4に記憶されている交通情報を用いて算出する(第2所要時間算出手段)。つまり、ステップS7、ステップS10で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。
【0077】
また、例えば、現在位置Mや仮目的地がステップS9で地点を求めるために採用した道路(例えば、幹線道)にない場合は、リンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を設定して、その経路の所要時間を算出し、RAMやフラッシュメモリに保存されている所要時間に加算してもよい。また、現在位置Mや仮目的地がステップS9で地点を求めるために採用した道路(例えば、幹線道)にない場合は、現在位置M、仮目的地からその道路(例えば、幹線道路)までの経路を計算はしないことで処理時間を短縮しても良い。
【0078】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0079】
ステップS16では、情報処理装置1は、エリアBの端点(ステップS9で設定した地点)から指示を受け付けた地点(仮目的地、タッチされた地点)までの経路を探索する(図8の太線)。その後、設定した経路における所要時間をリンクコストデータベース3、交通情報データベース4、地図データベース5のデータを利用して算出して、RAMやフラッシュメモリに保存されている所要時間を用いて算出した現在位置MからエリアBの端点までの所要時間に加算する(第2所要時間算出手段)。つまり、ステップS7、ステップS10で予め算出していた所要時間を用いて、現在位置Mから指示を受け付けた地点までの所要時間を算出する。なお、このとき、必要に応じて交通情報データベース4に記憶されている交通情報を適用して算出してもよい。
【0080】
このようにすることによって、設定された範囲外の地点を指示(タッチ)された場合であっても、予め算出しておいた所要時間を用いることによって、所要時間が報知されるまでの時間を短縮することができる。
【0081】
なお、指示を受け付けた地点(仮目的地、タッチされた地点)までの経路は、最短距離の経路でも良いし、時間優先でいける経路としても良い。その設定はユーザにより変えることが可能である。
【0082】
なお、図8に示すように、狭い方の範囲の端点から広い方の範囲の端点への経路を計算する際、道路が狭い範囲にまたがる道路は、その道路以降の計算をしないようにしても良い。
【0083】
ステップS17では、情報処理装置1は、ステップS14〜16で算出した所要時間を使った経路情報を作成する。この経路情報は、上述の所要時間、交通情報(渋滞情報など)を含む概略図に相当するものである。
【0084】
ステップS18では、情報処理装置1は、経路情報の表示内容を決定する。例えば、表示装置60に表示している地図の縮尺に合わせて表示内容を決定する。
【0085】
ステップS19では、情報処理装置1は、経路情報を表示装置60に表示させることによって報知する(報知手段)。つまり、算出された現在位置Mから指示を受け付けた地点までの所要時間、交通情報などを表示装置60に表示させることによって報知する。なお、表示装置60に経路情報を表示する際に、現在位置Mから指示を受け付けた地点までの経路を表示するようにしてもよい。
【0086】
なお、所用時間や交通情報は、表示装置60に表示することによって報知するほかにも、スピーカから音声で出力することによって報知してもよい。
【0087】
このように、現在位置Mから所定の範囲の端に達する経路の所要時間を予め計算して保存しておき、その保存しておいた所要時間を用いて現在位置Mから指示された地点までの所要時間を算出して報知することによって、所要時間が報知されるまでの時間を短縮することができる。また、現在位置から所定の範囲の端に達する経路の所要時間を予め計算して保存しておくことによって、処理負荷の集中を回避し表示装置60への表示速度を向上(応答性をよく)することができる。
【0088】
このように、所要時間が報知されるまでの時間を短縮することができるので、特定の目的地が決まっておらず、仮目的地が複数ある場合に好適である。つまり、ユーザは、表示装置60に表示されている地図上の任意の地点(仮目的地)をタッチするだけで、その地点までの所要時間を知ることが出来る。そして、このようなタッチ操作を繰り返し行なって、実際に向かう目的地を決めることができる。
【符号の説明】
【0089】
1 情報処理装置、2 センサ部、3 リンクコストDB(リンクコストデータベース)、4 交通情報DB(交通情報データベース)、5 地図DB(地図データベース)、6 通信装置、10 ナビゲーションシステム、20 GPS受信機、30 VICS受信機、40 車速センサ、50 操作部、60 表示装置、70 スピーカ、100 ナビゲーション装置、200 センタ、300 プローブ、400 VICSセンタ
【特許請求の範囲】
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、
前記現在位置を含む地図を表示する地図表示手段と、
前記現在位置を含む所定の範囲を設定する範囲設定手段と、
前記現在位置から前記範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する第1所要時間算出手段と、
前記所要時間を前記経路毎に保存する保存手段と、
前記地図表示手段にて表示されている地図上における地点の指示を受け付ける指示受付手段と、
前記現在位置から前記指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を前記保存手段に保存されている前記所要時間を用いて算出する第2所要時間算出手段と、
前記第2所要時間算出手段にて算出された所要時間を報知する報知手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する交通情報取得手段を備え、前記第1所要時間算出手段及び前記第2所要時間算出手段は、前記交通情報取得手段にて取得した前記交通情報を考慮して所要時間を算出することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記報知手段は、前記第2所要時間算出手段にて算出された所要時間に加えて、前記交通情報取得手段にて取得した前記交通情報のうち前記第2所要時間算出手段にて設定された経路に対応する前記交通情報を報知することを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記報知手段は、報知する内容を示す画像を表示することによって報知することを特徴とする請求項1乃至3のいずれか一項に記載のナビゲーション装置。
【請求項5】
前記報知手段は、前記第2所要時間算出手段にて設定された経路に対応する前記交通情報を示す画像を表示する場合、該交通情報の対象地点と、前記現在位置と、前記指示受付手段にて受け付けた地点との位置関係を示す図面を表示することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
前記第2所要時間算出手段は、前記指示受付手段にて指示を受け付けた地点が前記範囲設定手段によって設定された範囲外であった場合、前記範囲の端に対応する道路上の地点から前記指示受付手段にて指示を受け付けた地点までの経路を設定し、該経路における所要時間を算出して、前記保存手段に保存されている前記所要時間を用いて算出した所要時間に加算することを特徴とする請求項1乃至5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記範囲設定手段は、広さの異なる複数の範囲を設定するものであり、
前記第1所要時間算出手段は、複数の範囲が設定されている場合、前記範囲設定手段にて最も狭く設定された範囲においては、前記現在位置から最も狭い範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、前記範囲設定手段にて他の範囲を囲うように設定された外側範囲においては、当該外側範囲が囲んでいる範囲の端に対応する道路上の地点から、当該外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、
前記保存手段は、前記範囲設定手段にて設定された範囲毎に、前記経路毎の前記所要時間を保存し、
前記第2所要時間算出手段は、前記現在位置から前記指示受付手段にて指示を受け付けた地点までの経路を設定すると共に、前記指示受付手段にて指示を受け付けた地点が含まれる範囲を検索し、その経路における所要時間を前記保存手段に保存されている前記所要時間のうち、検索された範囲に対応する前記所要時間を用いて算出することを特徴とする請求項1乃至6のいずれか一項に記載のナビゲーション装置。
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、
前記現在位置を含む地図を表示する地図表示手段と、
前記現在位置を含む所定の範囲を設定する範囲設定手段と、
前記現在位置から前記範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出する第1所要時間算出手段と、
前記所要時間を前記経路毎に保存する保存手段と、
前記地図表示手段にて表示されている地図上における地点の指示を受け付ける指示受付手段と、
前記現在位置から前記指示受付手段にて指示を受け付けた地点までの経路を設定し、その経路における所要時間を前記保存手段に保存されている前記所要時間を用いて算出する第2所要時間算出手段と、
前記第2所要時間算出手段にて算出された所要時間を報知する報知手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
道路の渋滞の程度を示す渋滞情報を含む交通情報を取得する交通情報取得手段を備え、前記第1所要時間算出手段及び前記第2所要時間算出手段は、前記交通情報取得手段にて取得した前記交通情報を考慮して所要時間を算出することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記報知手段は、前記第2所要時間算出手段にて算出された所要時間に加えて、前記交通情報取得手段にて取得した前記交通情報のうち前記第2所要時間算出手段にて設定された経路に対応する前記交通情報を報知することを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記報知手段は、報知する内容を示す画像を表示することによって報知することを特徴とする請求項1乃至3のいずれか一項に記載のナビゲーション装置。
【請求項5】
前記報知手段は、前記第2所要時間算出手段にて設定された経路に対応する前記交通情報を示す画像を表示する場合、該交通情報の対象地点と、前記現在位置と、前記指示受付手段にて受け付けた地点との位置関係を示す図面を表示することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
前記第2所要時間算出手段は、前記指示受付手段にて指示を受け付けた地点が前記範囲設定手段によって設定された範囲外であった場合、前記範囲の端に対応する道路上の地点から前記指示受付手段にて指示を受け付けた地点までの経路を設定し、該経路における所要時間を算出して、前記保存手段に保存されている前記所要時間を用いて算出した所要時間に加算することを特徴とする請求項1乃至5のいずれか一項に記載のナビゲーション装置。
【請求項7】
前記範囲設定手段は、広さの異なる複数の範囲を設定するものであり、
前記第1所要時間算出手段は、複数の範囲が設定されている場合、前記範囲設定手段にて最も狭く設定された範囲においては、前記現在位置から最も狭い範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、前記範囲設定手段にて他の範囲を囲うように設定された外側範囲においては、当該外側範囲が囲んでいる範囲の端に対応する道路上の地点から、当該外側範囲の端に対応する道路上の地点までの経路を設定し、その経路における所要時間を算出し、
前記保存手段は、前記範囲設定手段にて設定された範囲毎に、前記経路毎の前記所要時間を保存し、
前記第2所要時間算出手段は、前記現在位置から前記指示受付手段にて指示を受け付けた地点までの経路を設定すると共に、前記指示受付手段にて指示を受け付けた地点が含まれる範囲を検索し、その経路における所要時間を前記保存手段に保存されている前記所要時間のうち、検索された範囲に対応する前記所要時間を用いて算出することを特徴とする請求項1乃至6のいずれか一項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−243367(P2010−243367A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−93313(P2009−93313)
【出願日】平成21年4月7日(2009.4.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月7日(2009.4.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]