
ナビゲーション装置
【課題】到着時刻の予測精度の向上を図る。
【解決手段】走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号変化タイミング情報として外部メモリ18に記憶させ、この信号変化タイミング情報に基づいて、案内経路上に存在する信号機の数と案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する(S202)。
【解決手段】走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号変化タイミング情報として外部メモリ18に記憶させ、この信号変化タイミング情報に基づいて、案内経路上に存在する信号機の数と案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する(S202)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、車両の走行状態を計測し、走行履歴情報として蓄積するとともに、この走行履歴情報に基づく走行軌跡と、統計交通情報に基づく走行軌跡とを比較して統計交通情報に対する走行履歴の進捗度を求め、該進捗度を元に統計交通情報に基づく走行軌跡を修正するようにして目的地を含む経路上任意地点への到着時刻を予測するものがある(例えば、特許文献1参照)。
【特許文献1】特開2005−241519号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記特許文献1に記載した装置は、経路上の信号機の数や信号機の変化特性を到着時刻の予測に反映させるようになっていないので、到着時刻の予測精度が十分でないという問題があった。
【0004】
本発明は上記問題に鑑みたもので、到着時刻の予測精度の向上を図ることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、請求項1に記載の発明は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置であって、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う信号変化タイミング情報記憶処理手段と、記憶媒体より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する第1の目的地到着予想時刻補正手段と、を備えたことを特徴としている。
【0006】
このような構成によれば、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行い、記憶媒体より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、到着時刻の予測精度を向上することが可能である。
【0007】
また、請求項2に記載の発明は、信号変化タイミング情報記憶処理手段は、推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を記憶媒体に記憶させることを特徴としている。
【0008】
このように、推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を記憶媒体に記憶させることができる。
【0009】
また、請求項3に記載の発明は、現在位置を特定する現在位置特定手段と、地図データを取得する地図データ取得手段と、現在位置および地図データに基づいて信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する第2の目的地到着予想時刻補正手段と、を備えたことを特徴としている。
【0010】
このような構成によれば、信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、更に、到着時刻の予測精度を向上することが可能である。
【発明を実施するための最良の形態】
【0011】
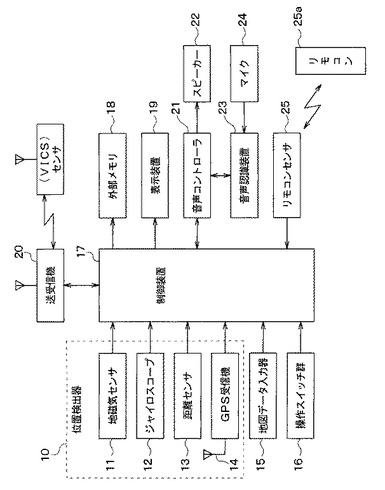
本発明の一実施形態に係るナビゲーション装置の構成を図1に示す。本ナビゲーション装置1は、位置検出器10、地図データ入力器15、操作スイッチ群16、外部メモリ18、表示装置19、送受信機20、音声コントローラ21、スピーカ22、音声認識装置23、マイク24、リモコンセンサ25と、これら各装置が接続された制御装置17を備えている。
【0012】
位置検出器10は、いずれも周知の地磁気センサ11、ジャイロスコープ12、距離センサ13およびGPS受信機14等のセンサを有しており、これらセンサにより入力される現在位置および向きを特定するための情報を制御装置17に出力する。また、距離センサ13は、車速に応じた車速信号を制御装置17へ出力する。
【0013】
地図データ入力器15は、地図データが記憶された地図データ記憶媒体(図示せず)から地図データを入力するための装置である。地図データには、各リンクの距離、道路種別、車線数、信号機の位置等を表す道路データ、位置検出精度を向上するためのいわゆるマップマッチングデータ、川、湖、海、鉄道、施設などの位置、形状、名称を表す背景データ、各地の施設の名称、所在位置、施設種
類等を示す施設データ等が含まれる。なお、本実施形態における地図データには、信号機の設置された交差点における停止線の位置(緯度、経度)も含まれる。また、地図データ記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、HDD等を用いてもよい。
【0014】
操作スイッチ群16は、表示装置19のディスプレイに重ねて設けられたタッチスイッチ、表示装置19のディスプレイの周囲に設けられたメカニカルスイッチ等によって構成され、ユーザのスイッチ操作に応じた信号を制御装置17に出力する。
【0015】
外部メモリ18は、制御装置17の内部に設けられたメモリとは別の記憶媒体で、各種プログラムや各種データが記憶される。外部メモリ18は、HDDやメモリカード等の不揮発性記憶媒体により構成されている。
【0016】
表示装置19は、液晶等のディスプレイを有し、制御装置17から入力される映像信号に応じた映像をディスプレイに表示させる。
【0017】
送受信機20は、道路に敷設されたビーコン等を介してVICS(登録商標)センサと各種データの送受信を行うための装置である。VICSセンサは、VICSセンタから提供される道路交通情報、気象情報、日付情報、施設情報、広告情報を受信すると、受信した各情報を送受信機20へ送出する。また、送受信機20より入力される車両情報、ユーザ情報等をVICSセンタへ送出する。
【0018】
音声認識装置23は、マイク24を介して入力される音声信号と、内部に記憶する認識辞書(図示せず)中の語彙データ(比較対象パターン)とを照合して音声認識を行い、音声認識の結果を音声コントローラ21に入力する。
【0019】
音声コントローラ21は、音声認識装置23の認識結果を制御装置17へ出力するとともに、制御装置17から入力される音声信号をスピーカ22へ出力する。また、音声コントローラ21は、マイク24から入力される音声信号に応じた音声をスピーカ22からトークバック出力(音声出力)させる。
【0020】
マイク24は、ユーザの発する音声に応じた音声信号を音声認識装置23に入力するためのものである。
【0021】
リモコンセンサ25は、ユーザの操作に基づいて赤外線等による無線信号を送信するリモコン25aから受信した信号を制御装置17へ出力する。
【0022】
制御装置17は、CPU、ROM、RAM、I/O等を備えたコンピュータとして構成されている。制御装置17のCPUは、ROMに記憶されたプログラムに従って各種処理を実行する。制御装置17のCPUが実行する処理としては、自車位置周辺の地図を表示する地図表示処理、目的地を設定する目的地設定処理、目的地に至る案内経路を探索する経路探索処理、目的地への到着予想時間を算出する到着時間算出処理、位置検出器10から入力される信号に基づいて自車位置を検出する自車位置検出処理等がある。
【0023】
本実施形態における制御装置17は、自車の停車時間と走行時間を計測し、走行中の道路に設置された各信号機の変化タイミングを推定し、当該推定した各信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う。
【0024】
次に、信号機が設置された交差点Aについて、この交差点Aに設置された信号機の信号変化タイミングを推定し、推定した信号変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理について説明する。
【0025】
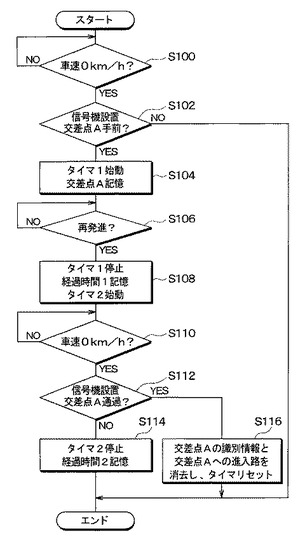
図2に、この処理のフローチャートを示す。本ナビゲーション装置は、車両のイグニッションスイッチがオンすると動作状態となり、制御装置17は、定期的に、図2に示す処理を実施する。
【0026】
まず、距離センサ13より入力される車速信号に基づいて自車の車速が時速0キロメートル(km/h)であるか否かを判定する(S100)。
【0027】
自車が走行中で、車速が時速0キロメートルでない場合、S100の判定はNOとなり、S100の判定を繰り返す。また、自車が停車し、車速が時速0キロメートルになると、S100の判定はYESとなり、S102へ進む。
【0028】
S102では、自車位置と地図データに基づいて信号機が設置された交差点Aの手前に自車が位置するか否かを判定する。
【0029】
したがって、交差点Aに設置された信号機が赤信号となり、交差点Aの手前で自車が停車すると、S100、S102の各判定はYESとなり、次に、タイマ1を始動させ、計時を開始する(S104)。具体的には、タイマ1をリセットした後、タイマ1を始動させるとともに、外部メモリ18に交差点Aの識別情報および交差点Aへの進入路を記憶させる。
【0030】
次に、自車の車速が時速0キロメートル以上であるか否かに基づいて自車が再発進したか否かを判定する(S106)。
【0031】
自車が停車したままで、車速が時速0キロメートルの場合、S106の判定はNOとなり、S106の判定を繰り返す。したがって、タイマ1は、計時を継続する。
【0032】
そして、交差点Aに設置された信号機が青信号になり、自車が再発進し、自車の車速が時速1キロメートル(km/h)以上になると、S106の判定はYESとなり、次に、タイマ1を停止させると同時に、タイマ2を始動させ、更に、タイマ1により計時された経過時間1と日時、曜日、進路方向を、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路と関連付けて外部メモリ18に記憶させる(S108)。このようにして、交差点Aの手前で停車してから発進するまでの経過時間1が外部メモリ18に記憶される。
【0033】
S110では、再度、距離センサ13より入力される車速信号に基づいて自車の車速が時速0キロメートルであるか否かを判定する(S110)。
【0034】
自車が走行中で、車速が時速0キロメートルとなっていない場合、S110の判定はNOとなり、S110の判定を繰り返す。したがって、タイマ2は、計時を継続する。
【0035】
また、S112では、自車位置と地図データに基づいて交差点Aを自車が通過したか否かを判定する。
【0036】
したがって、渋滞等により交差点Aに設置された信号機が再度赤信号になり、交差点Aの手前で自車が再度停車した場合、S110、S112の各判定はYESとなり、次に、タイマ2を停止させるとともにこのタイマ2により計時された経過時間2と日時、曜日、進路方向を、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路と関連付けて外部メモリ18に記憶させる(S114)。すなわち、交差点Aの手前で再発進してから再停車するまでの経過時間2が外部メモリ18に記憶される。
【0037】
上記したように、外部メモリ18には、交差点Aの識別情報および交差点Aへの進入路と関連付けて経過時間1、経過時間2が記憶される。すなわち、経過時間1を信号機の赤信号の時間、経過時間2を信号機の青信号の時間と黄信号の時間を合計した時間として、信号機の変化タイミングを示す信号変化タイミング情報が外部メモリ18に記憶される。
【0038】
また、自車が交差点Aを通過して停車した場合には、S112の判定はYESとなり、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路を消去するとともに、タイマ2をリセットし(S116)、本処理を終了する。
【0039】
なお、上記した手法を用いて信号機の赤信号の時間を推定する場合、信号機が赤信号に変化した直後に自車が停車した場合には、比較的精度良く赤信号の時間を推定することが可能であるが、信号機が青信号に変化する直前に自車が停車した場合には、赤信号の時間を短く推定してしまうことになる。そこで、経過時間1を外部メモリ18に蓄積するようにし、外部メモリ18に蓄積された経過時間1の中から最長のものを赤信号の時間としている。
【0040】
また、各信号機の経過時間1、経過時間2を信号変化タイミングとして外部メモリ18に蓄積し、この外部メモリ18に蓄積した各信号機の信号変化タイミングの規則性から、隣接する信号機と連動するように制御された複数の信号機が存在するか否かを推定し、隣接する信号機と連動するように制御された複数の信号機が存在する場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を外部メモリ18に記憶させるようにしている。なお、特定の信号機の手前で停車した頻度とこの信号機と隣接する信号機の手前で停車する頻度を比較し、各頻度が著しく異なる場合に、両方の信号機が連動するように制御されているものと推定することができる。
【0041】
本実施形態における制御装置17は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示する処理を実施する。
【0042】
図3に、この処理のフローチャートを示す。制御装置17は、ユーザ操作により目的地に至る案内経路の探索が指示されると、図2に示す処理を実施する。
【0043】
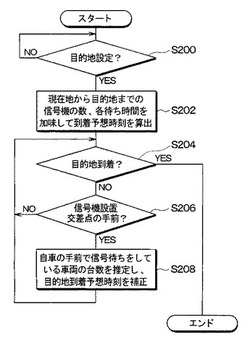
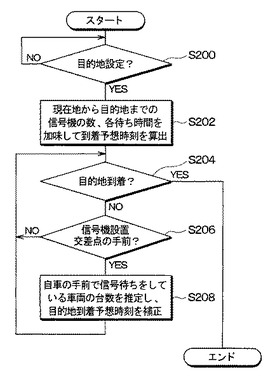
まず、目的地を設定する(S200)。具体的には、ユーザ操作に応じて目的地施設あるいは目的地地点を特定し、目的地として設定する。
【0044】
次に、出発地から目的地までの到着予想時刻を算出する(S202)。具体的には、現在位置から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を算出する。ここで、目的地到着予想時刻は、現在位置から目的地までの距離を、道路種別等に応じて定められた基準速度で除算した時間を、現在時刻に加算して求める。なお、このような目的地到着予想時刻の算出手法は周知である。本実施形態では、更に、案内経路上に存在し、現在の日時、曜日、進路方向と一致する信号機の信号変化タイミング情報を外部メモリ18から取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正し、この補正した目的地到着予想時刻を表示装置19に表示させる。
【0045】
例えば、案内経路上に存在する信号機の1機当たりの加算値(時間)を決めておき、この1機当たりの加算値に信号機の数を乗算した値を補正量として目的地到着予想時刻に加算するようにしてもよい。また、例えば、待ち時間(赤信号の時間)が予め定められた基準時間よりも長い信号機に対して、1機当たりの加算値(時間)を決めておき、この1機当たりの加算値に信号機の数を乗算した値を補正量として目的地到着予想時刻に加算するようにしてもよい。また、実験走行を実施して実際の状況に合うように補正量を決定してもよい。
【0046】
S204では、自車位置および地図データに基づいて目的地に到着したか否かを判定する。
【0047】
目的地に到着していない場合、S204の判定はNOとなり、次に、信号機が設置された交差点の手前に自車が位置するか否かを判定する(S206)。信号機が設置された交差点の手前に自車が位置するまで、S206の判定はNOとなり、S204へ戻る。
【0048】
また、信号機が設置された交差点の手前に自車が位置すると、S206の判定はYESとなり、次に、自車の前で信号待ちをしている車両の台数を推定し、目的地到着予想時刻を補正する(208)。具体的には、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する。
【0049】
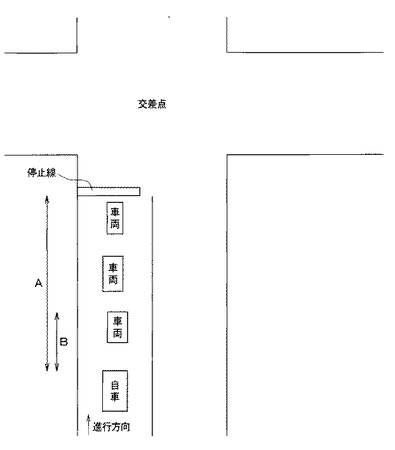
信号機が設置された交差点の手前において複数の車両の後ろで自車が信号待ちをしている様子を示す図4に示す。図に示すように、交差点の停止線と自車との距離をA、平均的な車両の全長と平均的な車両間隔の和をBとすると、自車の前で信号待ちをしている車両の台数は、A/Bとして推定することができる。なお、交差点の停止線と自車との距離Aは、交差点の停止線の位置(緯度、経度)を地図データより取得し、この交差点の停止線の位置と自車位置との直線距離を算出して求めることができる。また、平均的な車両の全長と平均的な車両間隔の和Bは、例えば、平均的な車両の全長を4メートル、平均的な車両間隔を2メートルとした場合、B=4+2=6メートルとなる。また、交差点の停止線と自車との距離Aを18メートルとすると、自車の前で信号待ちをしている車両の台数は、A/B=18/6=3となる。
【0050】
ここでは、自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する。例えば、自車の前で信号待ちをしている車両の1台当たりの加算値(時間)を決めておき、この1台当たりの加算値に自車の前で信号待ちをしている車両の台数を乗算した値を補正量として目的地到着予想時刻に加算し、S204へ戻る。
【0051】
上記した構成によれば、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行い、外部メモリ18より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、到着時刻の予測精度を向上することが可能である。
【0052】
また、信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、更に、到着時刻の予測精度を向上することが可能である。
【0053】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0054】
例えば、上記実施形態では、天候や周辺で開催されているイベントを考慮して目的地到着予想時刻を算出する構成となっていないが、天候が雨や雪の場合には目的地到着予想時刻が遅くなるように、また、周辺でイベントが開催されている場合にも目的地到着予想時刻が遅くなるように、目的地到着予想時刻を補正するようにしてもよい。また、送受信機20を介して工事情報、事故情報、渋滞情報を受信した場合、目的地到着予想時刻が遅くなるように、目的地到着予想時刻を補正するようにしてもよい。
【0055】
また、上記実施形態では、経過時間1を信号機の赤信号の時間、経過時間2を信号機の青信号の時間と黄信号の時間を合計した時間として、信号機の変化タイミングを示す信号変化タイミング情報を外部メモリ18に記憶する構成を示したが、例えば、経過時間1を信号機の赤信号と黄信号を合計した時間、経過時間2を信号機の青信号の時間として外部メモリ18に記憶してもよい。
【0056】
また、上記実施形態では、現在位置および地図データに基づいて走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行うように構成したが、例えば、車両前方を撮影するカメラを備え、このカメラを用いて撮影した撮影画像に画像認識処理を施して、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測するようにしてもよい。
【0057】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、図2に示したフローチャートが信号変化タイミング情報記憶処理手段に相当し、外部メモリ18が記憶媒体に相当し、S202が第1の目的地到着予想時刻補正手段に相当し、位置検出器10から入力される信号に基づいて自車位置を検出する処理が現在位置特定手段に相当し、地図データ入力器15が地図データ取得手段に相当し、S206、S208が第2の目的地到着予想時刻補正手段に相当する。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を示す図である。
【図2】制御装置による信号変化タイミング情報を記憶媒体に記憶させる処理を示すフローチャートである。
【図3】目的地到着予想時刻を表示する処理を示すフローチャートである。
【図4】自車の前で信号待ちをしている車両の台数を推定する手法について説明するための図である。
【符号の説明】
【0059】
1 ナビゲーション装置
10 位置検出器
11 地磁気センサ
12 ジャイロスコープ
13 距離センサ
14 GPS受信機
15 地図データ入力器
16 操作スイッチ群
17 制御装置
18 外部メモリ
19 表示装置
20 送受信機
21 音声コントローラ
22 スピーカ
23 音声認識装置
24 マイク
25 リモコンセンサ
【技術分野】
【0001】
本発明は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来、車両の走行状態を計測し、走行履歴情報として蓄積するとともに、この走行履歴情報に基づく走行軌跡と、統計交通情報に基づく走行軌跡とを比較して統計交通情報に対する走行履歴の進捗度を求め、該進捗度を元に統計交通情報に基づく走行軌跡を修正するようにして目的地を含む経路上任意地点への到着時刻を予測するものがある(例えば、特許文献1参照)。
【特許文献1】特開2005−241519号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記特許文献1に記載した装置は、経路上の信号機の数や信号機の変化特性を到着時刻の予測に反映させるようになっていないので、到着時刻の予測精度が十分でないという問題があった。
【0004】
本発明は上記問題に鑑みたもので、到着時刻の予測精度の向上を図ることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、請求項1に記載の発明は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置であって、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う信号変化タイミング情報記憶処理手段と、記憶媒体より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する第1の目的地到着予想時刻補正手段と、を備えたことを特徴としている。
【0006】
このような構成によれば、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行い、記憶媒体より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、到着時刻の予測精度を向上することが可能である。
【0007】
また、請求項2に記載の発明は、信号変化タイミング情報記憶処理手段は、推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を記憶媒体に記憶させることを特徴としている。
【0008】
このように、推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を記憶媒体に記憶させることができる。
【0009】
また、請求項3に記載の発明は、現在位置を特定する現在位置特定手段と、地図データを取得する地図データ取得手段と、現在位置および地図データに基づいて信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する第2の目的地到着予想時刻補正手段と、を備えたことを特徴としている。
【0010】
このような構成によれば、信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、更に、到着時刻の予測精度を向上することが可能である。
【発明を実施するための最良の形態】
【0011】
本発明の一実施形態に係るナビゲーション装置の構成を図1に示す。本ナビゲーション装置1は、位置検出器10、地図データ入力器15、操作スイッチ群16、外部メモリ18、表示装置19、送受信機20、音声コントローラ21、スピーカ22、音声認識装置23、マイク24、リモコンセンサ25と、これら各装置が接続された制御装置17を備えている。
【0012】
位置検出器10は、いずれも周知の地磁気センサ11、ジャイロスコープ12、距離センサ13およびGPS受信機14等のセンサを有しており、これらセンサにより入力される現在位置および向きを特定するための情報を制御装置17に出力する。また、距離センサ13は、車速に応じた車速信号を制御装置17へ出力する。
【0013】
地図データ入力器15は、地図データが記憶された地図データ記憶媒体(図示せず)から地図データを入力するための装置である。地図データには、各リンクの距離、道路種別、車線数、信号機の位置等を表す道路データ、位置検出精度を向上するためのいわゆるマップマッチングデータ、川、湖、海、鉄道、施設などの位置、形状、名称を表す背景データ、各地の施設の名称、所在位置、施設種
類等を示す施設データ等が含まれる。なお、本実施形態における地図データには、信号機の設置された交差点における停止線の位置(緯度、経度)も含まれる。また、地図データ記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、HDD等を用いてもよい。
【0014】
操作スイッチ群16は、表示装置19のディスプレイに重ねて設けられたタッチスイッチ、表示装置19のディスプレイの周囲に設けられたメカニカルスイッチ等によって構成され、ユーザのスイッチ操作に応じた信号を制御装置17に出力する。
【0015】
外部メモリ18は、制御装置17の内部に設けられたメモリとは別の記憶媒体で、各種プログラムや各種データが記憶される。外部メモリ18は、HDDやメモリカード等の不揮発性記憶媒体により構成されている。
【0016】
表示装置19は、液晶等のディスプレイを有し、制御装置17から入力される映像信号に応じた映像をディスプレイに表示させる。
【0017】
送受信機20は、道路に敷設されたビーコン等を介してVICS(登録商標)センサと各種データの送受信を行うための装置である。VICSセンサは、VICSセンタから提供される道路交通情報、気象情報、日付情報、施設情報、広告情報を受信すると、受信した各情報を送受信機20へ送出する。また、送受信機20より入力される車両情報、ユーザ情報等をVICSセンタへ送出する。
【0018】
音声認識装置23は、マイク24を介して入力される音声信号と、内部に記憶する認識辞書(図示せず)中の語彙データ(比較対象パターン)とを照合して音声認識を行い、音声認識の結果を音声コントローラ21に入力する。
【0019】
音声コントローラ21は、音声認識装置23の認識結果を制御装置17へ出力するとともに、制御装置17から入力される音声信号をスピーカ22へ出力する。また、音声コントローラ21は、マイク24から入力される音声信号に応じた音声をスピーカ22からトークバック出力(音声出力)させる。
【0020】
マイク24は、ユーザの発する音声に応じた音声信号を音声認識装置23に入力するためのものである。
【0021】
リモコンセンサ25は、ユーザの操作に基づいて赤外線等による無線信号を送信するリモコン25aから受信した信号を制御装置17へ出力する。
【0022】
制御装置17は、CPU、ROM、RAM、I/O等を備えたコンピュータとして構成されている。制御装置17のCPUは、ROMに記憶されたプログラムに従って各種処理を実行する。制御装置17のCPUが実行する処理としては、自車位置周辺の地図を表示する地図表示処理、目的地を設定する目的地設定処理、目的地に至る案内経路を探索する経路探索処理、目的地への到着予想時間を算出する到着時間算出処理、位置検出器10から入力される信号に基づいて自車位置を検出する自車位置検出処理等がある。
【0023】
本実施形態における制御装置17は、自車の停車時間と走行時間を計測し、走行中の道路に設置された各信号機の変化タイミングを推定し、当該推定した各信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う。
【0024】
次に、信号機が設置された交差点Aについて、この交差点Aに設置された信号機の信号変化タイミングを推定し、推定した信号変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理について説明する。
【0025】
図2に、この処理のフローチャートを示す。本ナビゲーション装置は、車両のイグニッションスイッチがオンすると動作状態となり、制御装置17は、定期的に、図2に示す処理を実施する。
【0026】
まず、距離センサ13より入力される車速信号に基づいて自車の車速が時速0キロメートル(km/h)であるか否かを判定する(S100)。
【0027】
自車が走行中で、車速が時速0キロメートルでない場合、S100の判定はNOとなり、S100の判定を繰り返す。また、自車が停車し、車速が時速0キロメートルになると、S100の判定はYESとなり、S102へ進む。
【0028】
S102では、自車位置と地図データに基づいて信号機が設置された交差点Aの手前に自車が位置するか否かを判定する。
【0029】
したがって、交差点Aに設置された信号機が赤信号となり、交差点Aの手前で自車が停車すると、S100、S102の各判定はYESとなり、次に、タイマ1を始動させ、計時を開始する(S104)。具体的には、タイマ1をリセットした後、タイマ1を始動させるとともに、外部メモリ18に交差点Aの識別情報および交差点Aへの進入路を記憶させる。
【0030】
次に、自車の車速が時速0キロメートル以上であるか否かに基づいて自車が再発進したか否かを判定する(S106)。
【0031】
自車が停車したままで、車速が時速0キロメートルの場合、S106の判定はNOとなり、S106の判定を繰り返す。したがって、タイマ1は、計時を継続する。
【0032】
そして、交差点Aに設置された信号機が青信号になり、自車が再発進し、自車の車速が時速1キロメートル(km/h)以上になると、S106の判定はYESとなり、次に、タイマ1を停止させると同時に、タイマ2を始動させ、更に、タイマ1により計時された経過時間1と日時、曜日、進路方向を、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路と関連付けて外部メモリ18に記憶させる(S108)。このようにして、交差点Aの手前で停車してから発進するまでの経過時間1が外部メモリ18に記憶される。
【0033】
S110では、再度、距離センサ13より入力される車速信号に基づいて自車の車速が時速0キロメートルであるか否かを判定する(S110)。
【0034】
自車が走行中で、車速が時速0キロメートルとなっていない場合、S110の判定はNOとなり、S110の判定を繰り返す。したがって、タイマ2は、計時を継続する。
【0035】
また、S112では、自車位置と地図データに基づいて交差点Aを自車が通過したか否かを判定する。
【0036】
したがって、渋滞等により交差点Aに設置された信号機が再度赤信号になり、交差点Aの手前で自車が再度停車した場合、S110、S112の各判定はYESとなり、次に、タイマ2を停止させるとともにこのタイマ2により計時された経過時間2と日時、曜日、進路方向を、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路と関連付けて外部メモリ18に記憶させる(S114)。すなわち、交差点Aの手前で再発進してから再停車するまでの経過時間2が外部メモリ18に記憶される。
【0037】
上記したように、外部メモリ18には、交差点Aの識別情報および交差点Aへの進入路と関連付けて経過時間1、経過時間2が記憶される。すなわち、経過時間1を信号機の赤信号の時間、経過時間2を信号機の青信号の時間と黄信号の時間を合計した時間として、信号機の変化タイミングを示す信号変化タイミング情報が外部メモリ18に記憶される。
【0038】
また、自車が交差点Aを通過して停車した場合には、S112の判定はYESとなり、外部メモリ18に記憶させた交差点Aの識別情報および交差点Aへの進入路を消去するとともに、タイマ2をリセットし(S116)、本処理を終了する。
【0039】
なお、上記した手法を用いて信号機の赤信号の時間を推定する場合、信号機が赤信号に変化した直後に自車が停車した場合には、比較的精度良く赤信号の時間を推定することが可能であるが、信号機が青信号に変化する直前に自車が停車した場合には、赤信号の時間を短く推定してしまうことになる。そこで、経過時間1を外部メモリ18に蓄積するようにし、外部メモリ18に蓄積された経過時間1の中から最長のものを赤信号の時間としている。
【0040】
また、各信号機の経過時間1、経過時間2を信号変化タイミングとして外部メモリ18に蓄積し、この外部メモリ18に蓄積した各信号機の信号変化タイミングの規則性から、隣接する信号機と連動するように制御された複数の信号機が存在するか否かを推定し、隣接する信号機と連動するように制御された複数の信号機が存在する場合、当該複数の信号機を1つの信号機群として信号変化タイミング情報を外部メモリ18に記憶させるようにしている。なお、特定の信号機の手前で停車した頻度とこの信号機と隣接する信号機の手前で停車する頻度を比較し、各頻度が著しく異なる場合に、両方の信号機が連動するように制御されているものと推定することができる。
【0041】
本実施形態における制御装置17は、出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示する処理を実施する。
【0042】
図3に、この処理のフローチャートを示す。制御装置17は、ユーザ操作により目的地に至る案内経路の探索が指示されると、図2に示す処理を実施する。
【0043】
まず、目的地を設定する(S200)。具体的には、ユーザ操作に応じて目的地施設あるいは目的地地点を特定し、目的地として設定する。
【0044】
次に、出発地から目的地までの到着予想時刻を算出する(S202)。具体的には、現在位置から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を算出する。ここで、目的地到着予想時刻は、現在位置から目的地までの距離を、道路種別等に応じて定められた基準速度で除算した時間を、現在時刻に加算して求める。なお、このような目的地到着予想時刻の算出手法は周知である。本実施形態では、更に、案内経路上に存在し、現在の日時、曜日、進路方向と一致する信号機の信号変化タイミング情報を外部メモリ18から取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正し、この補正した目的地到着予想時刻を表示装置19に表示させる。
【0045】
例えば、案内経路上に存在する信号機の1機当たりの加算値(時間)を決めておき、この1機当たりの加算値に信号機の数を乗算した値を補正量として目的地到着予想時刻に加算するようにしてもよい。また、例えば、待ち時間(赤信号の時間)が予め定められた基準時間よりも長い信号機に対して、1機当たりの加算値(時間)を決めておき、この1機当たりの加算値に信号機の数を乗算した値を補正量として目的地到着予想時刻に加算するようにしてもよい。また、実験走行を実施して実際の状況に合うように補正量を決定してもよい。
【0046】
S204では、自車位置および地図データに基づいて目的地に到着したか否かを判定する。
【0047】
目的地に到着していない場合、S204の判定はNOとなり、次に、信号機が設置された交差点の手前に自車が位置するか否かを判定する(S206)。信号機が設置された交差点の手前に自車が位置するまで、S206の判定はNOとなり、S204へ戻る。
【0048】
また、信号機が設置された交差点の手前に自車が位置すると、S206の判定はYESとなり、次に、自車の前で信号待ちをしている車両の台数を推定し、目的地到着予想時刻を補正する(208)。具体的には、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する。
【0049】
信号機が設置された交差点の手前において複数の車両の後ろで自車が信号待ちをしている様子を示す図4に示す。図に示すように、交差点の停止線と自車との距離をA、平均的な車両の全長と平均的な車両間隔の和をBとすると、自車の前で信号待ちをしている車両の台数は、A/Bとして推定することができる。なお、交差点の停止線と自車との距離Aは、交差点の停止線の位置(緯度、経度)を地図データより取得し、この交差点の停止線の位置と自車位置との直線距離を算出して求めることができる。また、平均的な車両の全長と平均的な車両間隔の和Bは、例えば、平均的な車両の全長を4メートル、平均的な車両間隔を2メートルとした場合、B=4+2=6メートルとなる。また、交差点の停止線と自車との距離Aを18メートルとすると、自車の前で信号待ちをしている車両の台数は、A/B=18/6=3となる。
【0050】
ここでは、自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正する。例えば、自車の前で信号待ちをしている車両の1台当たりの加算値(時間)を決めておき、この1台当たりの加算値に自車の前で信号待ちをしている車両の台数を乗算した値を補正量として目的地到着予想時刻に加算し、S204へ戻る。
【0051】
上記した構成によれば、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行い、外部メモリ18より、案内経路上に存在する各信号機の信号変化タイミング情報を取得し、案内経路上に存在する信号機の数および案内経路上に存在する各信号機の待ち時間を特定し、案内経路上に存在する信号機の数が多いほど目的地到着予想時刻が遅くなり、案内経路上に存在する各信号機の待ち時間が長いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、到着時刻の予測精度を向上することが可能である。
【0052】
また、信号機が設置された交差点の手前に自車が位置することを判定した場合、現在位置および地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど目的地到着予想時刻が遅くなるように目的地到着予想時刻を補正するので、更に、到着時刻の予測精度を向上することが可能である。
【0053】
なお、本発明は上記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々なる形態で実施することができる。
【0054】
例えば、上記実施形態では、天候や周辺で開催されているイベントを考慮して目的地到着予想時刻を算出する構成となっていないが、天候が雨や雪の場合には目的地到着予想時刻が遅くなるように、また、周辺でイベントが開催されている場合にも目的地到着予想時刻が遅くなるように、目的地到着予想時刻を補正するようにしてもよい。また、送受信機20を介して工事情報、事故情報、渋滞情報を受信した場合、目的地到着予想時刻が遅くなるように、目的地到着予想時刻を補正するようにしてもよい。
【0055】
また、上記実施形態では、経過時間1を信号機の赤信号の時間、経過時間2を信号機の青信号の時間と黄信号の時間を合計した時間として、信号機の変化タイミングを示す信号変化タイミング情報を外部メモリ18に記憶する構成を示したが、例えば、経過時間1を信号機の赤信号と黄信号を合計した時間、経過時間2を信号機の青信号の時間として外部メモリ18に記憶してもよい。
【0056】
また、上記実施形態では、現在位置および地図データに基づいて走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測し、信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行うように構成したが、例えば、車両前方を撮影するカメラを備え、このカメラを用いて撮影した撮影画像に画像認識処理を施して、走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と信号機の手前で発進してから再度停車するまでの時間を計測するようにしてもよい。
【0057】
なお、上記実施形態における構成と特許請求の範囲の構成との対応関係について説明すると、図2に示したフローチャートが信号変化タイミング情報記憶処理手段に相当し、外部メモリ18が記憶媒体に相当し、S202が第1の目的地到着予想時刻補正手段に相当し、位置検出器10から入力される信号に基づいて自車位置を検出する処理が現在位置特定手段に相当し、地図データ入力器15が地図データ取得手段に相当し、S206、S208が第2の目的地到着予想時刻補正手段に相当する。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態に係るナビゲーション装置の構成を示す図である。
【図2】制御装置による信号変化タイミング情報を記憶媒体に記憶させる処理を示すフローチャートである。
【図3】目的地到着予想時刻を表示する処理を示すフローチャートである。
【図4】自車の前で信号待ちをしている車両の台数を推定する手法について説明するための図である。
【符号の説明】
【0059】
1 ナビゲーション装置
10 位置検出器
11 地磁気センサ
12 ジャイロスコープ
13 距離センサ
14 GPS受信機
15 地図データ入力器
16 操作スイッチ群
17 制御装置
18 外部メモリ
19 表示装置
20 送受信機
21 音声コントローラ
22 スピーカ
23 音声認識装置
24 マイク
25 リモコンセンサ
【特許請求の範囲】
【請求項1】
出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置であって、
走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と前記信号機の手前で発進してから再度停車するまでの時間を計測し、前記信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う信号変化タイミング情報記憶処理手段と、
前記記憶媒体より、前記案内経路上に存在する各信号機の信号変化タイミング情報を取得し、前記案内経路上に存在する信号機の数および前記案内経路上に存在する各信号機の待ち時間を特定し、前記案内経路上に存在する信号機の数が多いほど前記目的地到着予想時刻が遅くなり、前記案内経路上に存在する各信号機の待ち時間が長いほど前記目的地到着予想時刻が遅くなるように前記目的地到着予想時刻を補正する第1の目的地到着予想時刻補正手段と、を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記信号変化タイミング情報記憶処理手段は、前記推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として前記信号変化タイミング情報を前記記憶媒体に記憶させることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
現在位置を特定する現在位置特定手段と、
地図データを取得する地図データ取得手段と、
前記現在位置および前記地図データに基づいて前記信号機が設置された交差点の手前に自車が位置することを判定した場合、前記現在位置および前記地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど前記目的地到着予想時刻が遅くなるように前記目的地到着予想時刻を補正する第2の目的地到着予想時刻補正手段と、を備えたことを特徴とする請求項1または2に記載のナビゲーション装置。
【請求項1】
出発地から目的地に至る案内経路を探索するとともに当該案内経路に沿って走行したときの目的地到着予想時刻を表示するナビゲーション装置であって、
走行中の道路に設置された信号機の手前で停車してから発進するまでの時間と前記信号機の手前で発進してから再度停車するまでの時間を計測し、前記信号機の変化タイミングを示す信号変化タイミング情報を記憶媒体に記憶させる処理を行う信号変化タイミング情報記憶処理手段と、
前記記憶媒体より、前記案内経路上に存在する各信号機の信号変化タイミング情報を取得し、前記案内経路上に存在する信号機の数および前記案内経路上に存在する各信号機の待ち時間を特定し、前記案内経路上に存在する信号機の数が多いほど前記目的地到着予想時刻が遅くなり、前記案内経路上に存在する各信号機の待ち時間が長いほど前記目的地到着予想時刻が遅くなるように前記目的地到着予想時刻を補正する第1の目的地到着予想時刻補正手段と、を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記信号変化タイミング情報記憶処理手段は、前記推定した各信号機の変化タイミングから、隣接する信号機と連動するように制御された複数の信号機が存在することを推定した場合、当該複数の信号機を1つの信号機群として前記信号変化タイミング情報を前記記憶媒体に記憶させることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
現在位置を特定する現在位置特定手段と、
地図データを取得する地図データ取得手段と、
前記現在位置および前記地図データに基づいて前記信号機が設置された交差点の手前に自車が位置することを判定した場合、前記現在位置および前記地図データに基づいて自車の前で信号待ちをしている車両の台数を推定し、当該推定した自車の前で信号待ちをしている車両の台数が多いほど前記目的地到着予想時刻が遅くなるように前記目的地到着予想時刻を補正する第2の目的地到着予想時刻補正手段と、を備えたことを特徴とする請求項1または2に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−8068(P2010−8068A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−164299(P2008−164299)
【出願日】平成20年6月24日(2008.6.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月24日(2008.6.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]