
ナビゲーション装置
【課題】上り、下りの道路がそれぞれ独立した道路として表現された道路上に、ユーザを案内すべき地点が設定された場合にも、ユーザに対して良好な経路案内を行う「ナビゲーション装置」を提供する。
【解決手段】誘導経路終点地点である誘導地点のノード631に到達する前に最後に走行するリンク640が、二条全道路を形成する上り下り方向の二つの道路601、602のリンクを連結するリンクであって、その直前に通過するリンクが当該最後に走行するリンク640が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路602のリンクである場合(a)、到達判定地点630を、誘導地点に設定されているノード631から、誘導地点に設定されているノード631の前に通過するノード632に変更する(b)。
【解決手段】誘導経路終点地点である誘導地点のノード631に到達する前に最後に走行するリンク640が、二条全道路を形成する上り下り方向の二つの道路601、602のリンクを連結するリンクであって、その直前に通過するリンクが当該最後に走行するリンク640が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路602のリンクである場合(a)、到達判定地点630を、誘導地点に設定されているノード631から、誘導地点に設定されているノード631の前に通過するノード632に変更する(b)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車に搭載されるナビゲーション装置において経路案内を行う技術に関するものである。
【背景技術】
【0002】
自動車に搭載されるナビゲーション装置において経路案内を行う技術としては、目的地到着が検出されるまで経路案内を行う技術が知られている。また、このような経路案内を行うナビゲーション装置において、目的地到着を検出する技術としては、目的地が車両進入禁止区域内に設定されていない場合には、自動車が第1の所定距離まで目的地に近づいた時点で目的地到着を検出すると共に、目的地が車両進入禁止区域内に設定されている場合には、自動車が前記第1の所定の距離よりも大きく設定した第2の所定の距離まで目的地に近づいた時点で目的地到着を検出するようにした技術が知られている(たとえば、特許文献1)。
【特許文献1】特開2005-241561号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
一つの路線を形成する上り方向の道路と下り方向の道路が離間した形態で並行に敷設されている場合などには、道路網を表す地図データにおいて、各方向の道路がそれぞれ独立した道路として表現されることがある。ここで、以下では、便宜上、このような地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された道路を「二条線道路」と呼ぶことにする。
【0004】
さて、ナビゲーション装置において、経路終了地点到着の検出を行い、当該検出をもって経路案内を終了する場合、一般的には、経路終了地点到着の検出は、経路終了地点前の最後の進路変更(左折/右折等)を案内した後に、経路終了地点に接近したときに行うようにすることが、ユーザを確実に経路終了地点まで誘導する上で好ましい。
【0005】
しかしながら、このようにすると、二条線道路上に経路終了地点が設定されている場合には、次のような問題が生じる。
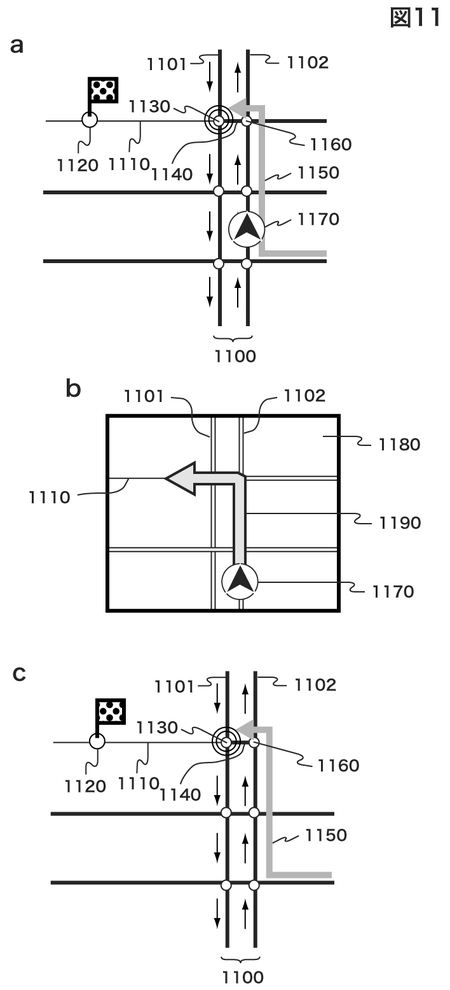
すなわち、いま、図11aに示すように、地図データ上において、上り方向の道路1101と、下り方向の道路1102からなる二条線道路1100が存在し、道路1101に連結する車両進入不可能道路1110上にユーザによって目的地1120が設定された場合、車両進入不可能道路1110に自動車は進入できないので、車両進入不可能道路1110の車両進入可能な最寄り地点となる、道路1101の車両進入不可能道路1110との連結ノード1130に経路終了地点に設定されることになる。
【0006】
そして、この場合において、図示するように、道路1102を走行後、道路1102上のノード1160と、道路1101上の経路終了地点1130に設定されているノードとを連結する道路区間1140を走行して、経路終了地点1130に到る経路1150が設定されているときを考える。
【0007】
このとき、経路終了地点前の最後の進路変更(左折/右折等)地点は、道路1102と道路区間1140の連結ノード1160となる。
そこで、この連結ノード1160に自動車の現在位置1170が接近したときに、図11bに示すように、連結ノード1160における進路変更方向を連結ノード1160周辺を表した地図1180上で矢印1190によって案内するようにすると、道路1102と道路1101が二条線道路であり、これらを連結する道路区間1140が極めて短いために、図示するように矢印1190の先端が進入不可能道路1110まで達してしまい、進入不可能道路1110を走行できるものとユーザに誤解を与えてしまうことがある。
【0008】
また、この場合、道路区間1140上で、経路終了地点への接近による経路終了地点到着の検出が行われ経路案内を終了することになるが、経路案内終了に伴って経路終了地点到着や経路案内の終了を音声メッセージによって案内する場合などには、道路区間1140が極めて短いために、実際の経路終了地点1130到着までに、当該音声メッセージによる案内が間に合わない場合がある。また、道路区間1140が、図11cに示すように、二条線道路1100を形成する道路1101と道路1102間のUターン専用の道路である場合には、Uターン専用の道路上で経路案内が終了することになるため、ユーザにとって中途半端な経路案内となってしまう。
【0009】
そこで、本発明は、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された、一つの路線を形成する道路上に、ユーザを案内すべき地点が設定された場合にも、ユーザに対して良好な経路案内を行えるようにすることを課題とする。
【課題を解決するための手段】
【0010】
前記課題達成のために、本発明は、自動車に搭載されるナビゲーション装置に、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、前記自動車の現在位置を算出する現在位置算出部と、前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを設け、前記到着判定部において、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とするようにしたものである。
【0011】
このようなナビゲーション装置によれば、誘導経路が、二条線道路を形成する第1の道路と第2の道路のうちの第1の道路から、当該第1の道路と第2の道路とを連結する連結道路を通って、当該連結道路と当該第2の道路との連結地点に設定された経路終了地点で終了するものであった場合には、前記二条線道路を形成する第1の道路と前記連結道路との連結地点に接近した時点で経路案内を終了する。
【0012】
したがって、前記第1の道路から連結道路に進入する進路変更を案内して、前記第2の道路に連結している進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが経路終了地点の到着までに間に合わなくなってしまったり、連結道路の道路上で経路案内が中途半端に終了することを避けることができる。
【0013】
なお、このようなナビゲーション装置は、前記到着判定部において、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とするように構成してもよい。また、このようなナビゲーション装置は、前記到着判定部において、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とするように構成してもよい。
【0014】
また、以上のようなナビゲーション装置に、前記到着判定部が、前記経路誘導部の前記経路案内を終了させるときに、前記目的地の位置を案内する目的地案内部を備えるようにしてもよい。
また、前記課題達成のために、本発明は、自動車に搭載されるナビゲーション装置に、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、前記自動車の現在位置を算出する現在位置算出部と、前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを設け、前記誘導経路設定部において、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定するように構成したものである。
【0015】
このようなナビゲーション装置によれば、探索した経路終了地点への経路が二条線道路を形成する第1の道路と第2の道路のうちの第1の道路から、当該第1の道路と第2の道路と連結する連結道路を通って、当該連結道路と当該第2の道路との連結地点に設定された経路終了地点で終了するものであった場合には、前記二条線道路を形成する第1の道路と前記連結道路との連結地点に経路終了地点を変更し、変更後の経路終了地点までの経路を誘導経路として設定する。
【0016】
したがって、前記第1の道路から連結道路に進入する経路は誘導経路に含まれず、前記第1の道路から連結道路に進入する進路変更を案内して、前記他方の道路に連結している進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが経路終了地点の到着までに間に合わなくなってしまったり、連結道路の道路上で経路案内が中途半端に終了することを避けることができる。
【0017】
ここで、このようなナビゲーション装置は、前記誘導経路設定部において、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更するように構成してもよい。また、このようなナビゲーション装置は、前記誘導経路設定部において、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更するように構成してもよい。
【0018】
なお、以上のような各ナビゲーション装置は、前記地図データが表す道路網上で、走行方向が反対向きの隣接した二つの道路を、前記二条線道路と同様に扱って、以上の各処理を行うように構成してもよい。
【発明の効果】
【0019】
以上のように本発明によれば、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された、一つの路線を形成する道路上にユーザを案内すべき地点が設定された場合にも、ユーザに対して良好な経路案内を行えるようになる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施形態について、自動車の通行区分が右側通行である場合を例にとり説明する。
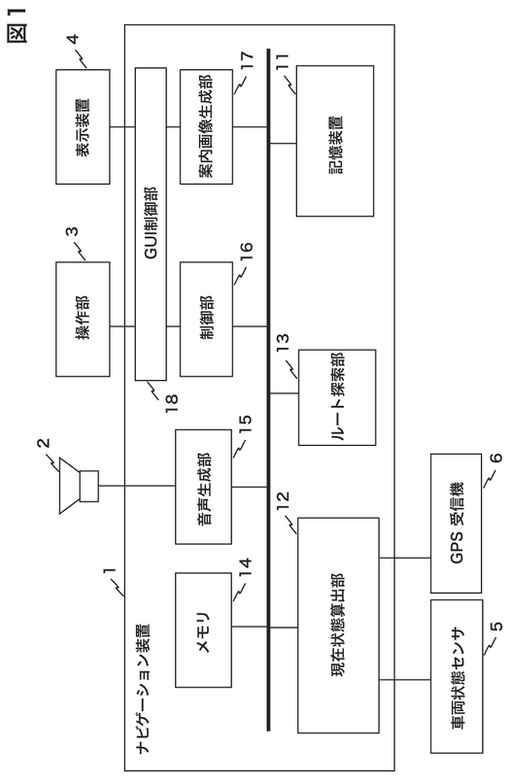
図1に、本実施形態に係るナビゲーションシステムの構成を示す。
ナビゲーションシステムは、自動車に搭載されるシステムであり、図示するように、ナビゲーション装置1と、スピーカ2と、操作部3と、表示装置4と、車両状態センサ5と、GPS受信機6とを備えて構成される。
ここで、車両状態センサ5は、角加速度センサや地磁気センサなどである方位センサや、車速パルスセンサなどである車速センサなどの各種車両状態を検出する各種センサである。
そして、ナビゲーション装置1は、地図を表す地図データを記憶したHDDなどの記憶装置11、現在状態算出部12、ルート探索部13、メモリ14、音声を生成しスピーカ2から出力する音声生成部15、制御部16、案内画像生成部17、操作部3や表示装置4を用いたユーザとの間の入出力を制御するGUI制御部18を備えている。
【0021】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたコンピュータであって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0022】
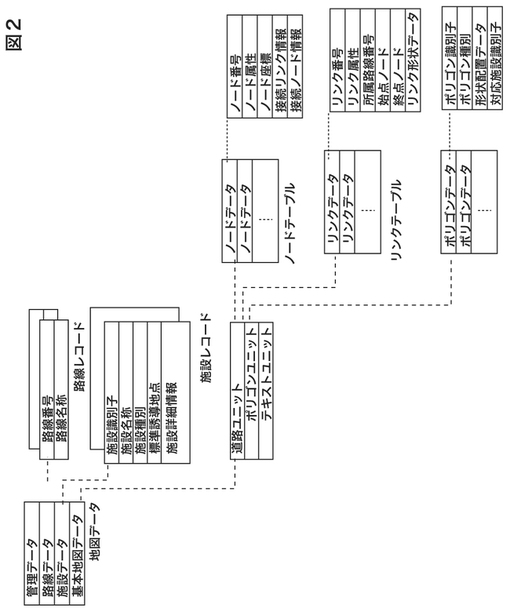
次に、図2に、記憶装置11に記憶される地図データの内容を示す。
図示するように、地図データは、地図データのバージョン等を記述した管理データ、各道路路線の情報を表す路線データ、施設データ、地図を表す基本地図データを含んで構成される。
そして、路線データは、路線毎に設けられた路線レコードを有し、各路線レコードには対応する路線の識別子となる路線番号と、対応する路線の名称である路線名称が登録されている。
次に、施設データは、予め選定した施設毎に設けられた施設レコードを有し、各施設レコードには、対応する施設の識別子となる施設識別子と、対応する施設の名称を表す施設名称と、対応する施設の公園やレストランといった種別を表す施設種別と、標準誘導地点と、対応する施設の住所や電話番号やその他の各種情報が登録される施設詳細情報が格納されている。ここで、標準誘導地点とは、対応する施設または施設内の位置が目的地としてユーザによって指定された場合に、ユーザを誘導する地点、すなわち、当該目的地までの経路の終了地点として設定する地点を表し、当該標準誘導地点としては、通常、対応する施設の入り口に最も近い道路(後述するリンク)上の地点が設定される。
【0023】
次に、基本地図データは、道路ネットワークを表す道路ユニットと、表示地図を構成する図形オブジェクト(道路図形や施設図形や地形図形等)を表すポリゴンユニットと、表示地図を構成するテキストオブジェクト(地名や道路名称等)を表すテキストユニットとを有する。
ここで、道路ユニットでは、交差点を表すノードと、ノード間を連結するリンクの集合として道路網を定義しており、道路ユニットは、ノード毎に設けられたノードデータと、リンク毎に設けられたリンクデータとを有する。
また、各ノードデータには、対応するノードの識別子となるノード番号、対応するノードの各種属性を表すノード属性、対応するノードの位置を表すノード座標、対応するノードに接続するリンクを表す接続リンク情報、対応するノードに一本のリンクを介して接続する他のノードを表す接続ノード情報とを含む。
【0024】
また、各リンクデータには、対応するリンクの識別子となるリンク番号、対応するリンクの各種属性を表すリンク属性、対応するリンクの属する路線の路線番号を示す所属路線番号、対応するリンクの始点となるノードのノード番号を表す始点ノードと、対応するリンクの終点となるノードのノード番号を表す終点ノード、対応するリンクの形状を表すリンク形状データとが登録される。また、リンク属性には、対応するリンクが、車両進入不可能道路のリンクであるか否かや、対応するリンクが、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された道路(以下、「二条線道路」と記す)を形成するリンクであるか否かや、対応するリンクを走行できる方向(始点ノードから終点ノードに向かう方向のみ、双方向など)などが登録されている。
【0025】
次に、ポリゴンユニットには、表示地図を構成する図形オブジェクト(道路図形や施設図形や地形図形等)毎に設けられたポリゴンデータを有し、各ポリゴンデータは、対応する図形オブジェクトの識別子であるポリゴン識別子、対応する図形オブジェクトの道路図形、施設図形、地形図形といった図形種別を表すポリゴン種別、対応するポリゴンの形状と地図上の配置を表す形状配置データ、対応する図形オブジェクトが施設図形である場合に当該施設の施設識別子を表す対応施設識別子とが登録される。
【0026】
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、車両状態センサ5やGPS受信機6の出力から推定される現在位置に対して、記憶装置11から読み出した地図データの基本地図データの道路ユニットが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向とを、それぞれ現在位置、現在進行方位として決定し、メモリ14に設定する。
【0027】
また、制御部16は、ユーザから操作部3、GUI制御部18を介して一つの目的地の設定を受け付け、これをメモリ14にセットする。ここで、目的地としては、最終目的地の他に1または複数の中間目的地(経由地)の設定も受け付けることができる。そして、最終目的地までの誘導経路をルート探索部13に探索させる。
【0028】
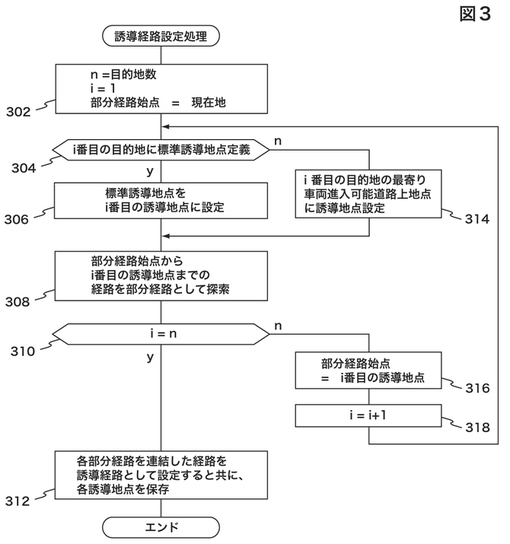
ルート探索部13は、誘導経路の探索を制御部16から指示されたならば、図3に示す誘導経路設定処理を行う。
すなわち、経路設定処理では、まず、メモリ14に設定されている現在位置を、部分経路始点に設定する(ステップ302)。
そして、到達すべき順に各目的地(中間目的地および最終目的地)に順次着目し(ステップ310、318)、着目した目的地について順次以下の処理を行う。
すなわち、まず、着目した目的地の誘導地点を算出する(ステップ304、306、314)。ここで、着目した目的地が施設または施設内の地点であって、当該施設の施設レコードに標準誘導地点が定義されている場合には(ステップ304)、定義されている標準誘導地点を、着目した目的地の誘導地点として算出し(ステップ306)、その他の場合は、着目した目的地に最寄りの車両進入可能道路上の地点を誘導地点として算出する(ステップ314)。なお、目的地が施設である場合の標準誘導地点は、当該施設の施設レコードの標準誘導地点として求める。また、目的地が施設内の地点である場合の標準誘導地点は、たとえば、案内画像上で目的地として指定された位置を含む図形オブジェクトのポリゴンデータの対応施設識別子を施設識別子とする施設レコードの標準誘導地点として求める。
【0029】
次に、設定されている部分経路始点から誘導地点までの経路を、必要地理的範囲の地図データを記憶装置11から読み出し、距離最小、時間最小などコストモデルに基づいて部分経路として探索する(ステップ308)。
そして、着目している目的地が最終目的地でなければ、部分経路始点を、着目している目的地について算出した誘導地点に更新し(ステップ316)、現在着目している目的地についての処理を終了し、次に到達すべき目的地に着目した処理に進む。
そして、全て目的地について以上のようにして部分経路が探索されたならば、それまでに探索した部分経路を連結した経路を誘導経路として、メモリ14に設定すると共に、各部分経路の終点となっている誘導地点をメモリ14に設定する(ステップ312)。
このような誘導経路設定処理の結果、メモリ14に設定されている現在位置から最終目的地までの、メモリ14に設定されている各中間目的地を経由する最小コストの経路が誘導経路としてメモリ14にセットされることになる。
図1に戻り、制御部16は、メモリ14にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ14にセットされている目的地や誘導経路をクリアする処理を行う。
また、案内画像生成部17は、メモリ14にセットされている現在位置を参照し、地図データが示す現在位置やユーザが指定した地点周辺に設定した地図表示範囲内の地図を、所定の縮尺で表す地図画像を生成する。また、案内画像生成部17は、描画した地図画像上に、メモリ14にセットされている現在位置を表す現在位置マークを描画し、案内画像としてGUI制御部18を介して表示装置4に表示する処理を繰り返し行う。ここで、メモリ14に目的地や誘導経路がセットされている場合には、案内画像生成部17は、誘導経路の地図表示範囲内の部分を表す誘導経路図形も案内画像に含めて表示する。また、地図表示範囲内に目的地が含まれる場合には、さらに、目的地を表す目的地マークも案内画像に含めて表示する。
【0030】
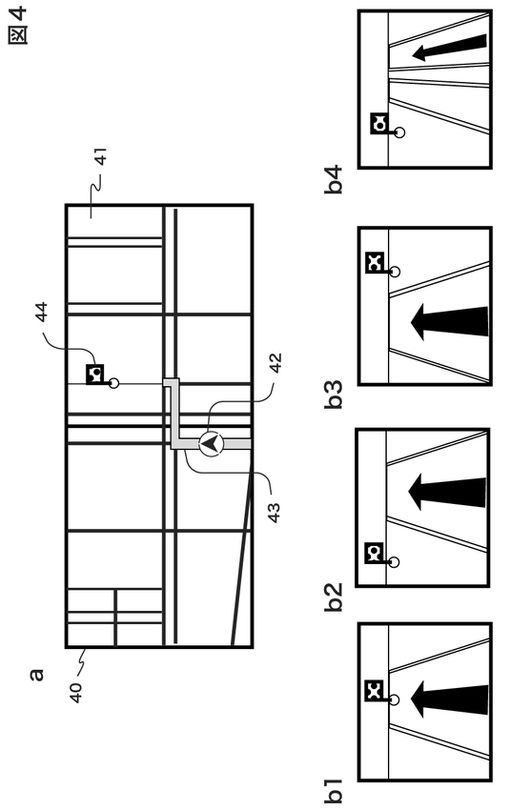
図4aに、このようにして表示される案内画像の例を示す。
図示するように、この例では、案内画像40は、現在位置周辺の地図を表す地図画像41上に、現在位置を表す現在位置マーク42が表されたものとなる。また、誘導経路や目的地がセットされている場合には、案内画像40は、誘導経路を表す誘導経路図形43を含む。また、地図表示範囲内に目的地が含まれる場合には、さらに、目的地マーク44も案内画像40に含まれることになる。
【0031】
次に、以上のような構成において、制御部16は、メモリ14に目的地や誘導経路が設定されたならば、以下に示す経路案内処理を開始する。
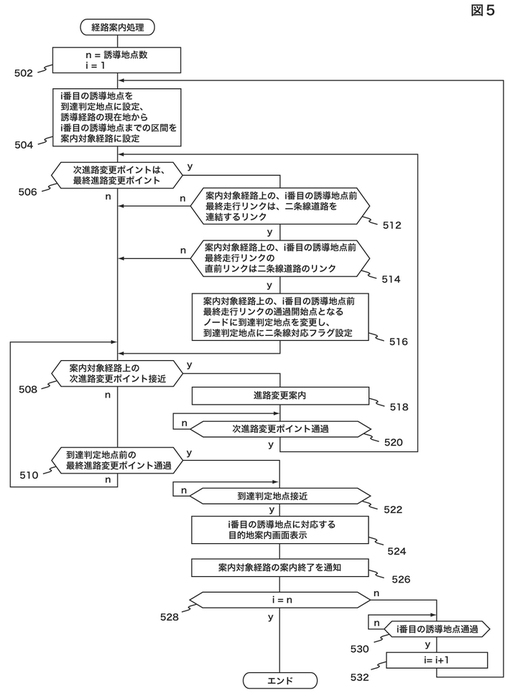
図5に、この経路案内処理の手順を示す。
図示するように、制御部16は、この処理において、メモリ14に設定されている各誘導地点に到達すべき順に順次着目して(ステップ502、528、532)以下の処理を行う。
すなわち、まず、着目した誘導地点を到達判定地点に設定すると共に、誘導経路の現在位置から着目した誘導地点までの区間を案内対象経路に設定する(ステップ504)。
そして、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントであるかどうかを調べる(ステップ506)。ただし、ステップ506では、案内対象経路上に今後通過する進路変更ポイントが存在しない場合には、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントでないものと判定するようにする。
【0032】
そして、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントでなければ(ステップ506)、誘導経路上次に通過する進路変更ポイントへの所定距離(たとえば、300m)内への接近の発生(ステップ508)と、案内経路上の到達判定地点前の最後の進路変更ポイントの通過(ステップ510)とを監視する。
【0033】
一方、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントであれば(ステップ506)、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであるかどうかを調べる(ステップ512)。
【0034】
ここでは、当該最後に走行するリンクのリンクデータと、当該最後に走行するリンクの両端のノードに連結する各リンクのリンクデータを参照し、最後に走行するリンクが、二条線道路を形成するリンクでなく、かつ、最後に走行するリンクの一端のノードと他端のノードに、それぞれ、二条線道路を形成するリンクが連結している場合に、当該最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであると判定する。なお、各リンクが二条線道路を形成するリンクであるかどうかは、当該リンクのリンクデータのリンク属性より求めることができる。
【0035】
または、当該最後に走行するリンクの一端に連結するリンクと、他端に連結するリンクとの、リンクが属する路線の路線名称が等しいペアが存在し、かつ、当該ペアのリンクが属する路線の路線名称が、当該最後に走行するリンクが属する路線の路線名称と異なる場合に、当該最後に走行するリンクが、二条線道路を形成する上り下り方向の二つの道路を連結するリンクであると判定するようにしてもよい。なお、各リンクの属する路線の路線名称は、当該リンクのリンクデータに登録されて所属路線番号が路線番号として登録されている路線レコードに登録された路線名称として求めることができる。
【0036】
そして、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクでなければ(ステップ512)、ステップ508、510の監視に進む。
一方、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであれば(ステップ512)、さらに、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであるかどうかを調べ(ステップ514)、二条線道路を形成する上り下り方向の二つの道路のうちのいずれの道路のリンクでもなければ、ステップ508、510の監視に進む。
【0037】
一方、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであれば(ステップ514)、案内対象経路に従って走行した場合に当該最後に走行するリンクの走行開始点となるノードに到達判定地点を更新し、更新した到達判定地点に二条線対応フラグをセットする(ステップ516)。そして、ステップ508、510の監視に進む。
【0038】
但し、ステップ516は、着目した誘導地点に自動車が走行不可能なリンクが連結している場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。または、ステップ516は、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。または、ステップ516は、着目した誘導地点に自動車が走行不可能なリンクが連結しているか、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。なお、リンクが自動車が走行不可能なリンクであるか否かや、リンクがUターン専用のリンクであるか否かは、当該リンクのリンクデータのリンク属性より求めることができる。
【0039】
次に、ステップ508、510の監視中に、現在位置の誘導経路上次に通過する進路変更ポイントへの所定距離内への接近が発生した場合には(ステップ508)、当該進路変更ポイントにおける進路変更の案内を行い(ステップ518)、進路変更ポイントの通過を待って(ステップ520)、ステップ506からの処理に戻る。ここで、当該進路変更ポイントにおける、進路変更の案内は、たとえば、進路変更ポイントにおける進路変更方向を、進路変更ポイント周辺を表した地図上で矢印によって表した進路変更案内図を、GUI制御部18を介して表示装置4に表示すると共に、音声生成部15に、たとえば、「300m先の交差点を左折です」といったような音声案内メッセージをスピーカ2に出力させることにより行う。なお、進路変更案内図は、進路変更ポイントを通過したならば消去する。
【0040】
一方、ステップ508、510の監視中に、到達判定地点前の最後の進路変更ポイントの通過が発生したならば(ステップ510)、設定されている到達判定地点への所定距離(たとえば、300m)内への接近を待って(ステップ522)、予め用意しておいた図3b1からb4に示すような目的地案内画面をGUI制御部18を介して所定期間、表示装置4に表示する(ステップ524)。
【0041】
ここで、図3b1、b2、b3は、到着判定地点に二条線対応フラグが設定されていない場合に用いる目的地案内画面である。また、図3b1は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、およそ正面のリンク上にあるときに用いる目的地案内画面であり、図3b2は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、左側のリンク上または走行中道路から左側に離れた位置にあるときに用いる目的地案内画面であり、図3b3は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、右側のリンク上または走行中道路から右側に離れた位置にあるときに用いる目的地案内画面である。そして、図3b4は、到着判定地点に二条線対応フラグが設定されている場合に用いる目的地案内画面である。なお、着目する誘導地点に対応する目的地とは、図3に示した誘導経路設定処理において、着目する誘導地点が算出された目的地である。
【0042】
そして、次に、案内対象経路の案内の終了を、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージをスピーカ2に出力させることによりユーザに通知する(ステップ526)。
そして、着目する誘導地点が、最後の誘導地点であれば(ステップ528)、着目する誘導地点についての処理を終了すると共に、経路案内処理を終了する。
一方、着目する誘導地点が、最後の誘導地点でなければ、着目する誘導地点への通過を待って(ステップ530)、着目する誘導地点についての処理を終了し、次の誘導地点に着目したステップ504からの処理に進む。
ここで、誘導地点の通過の判定は、たとえば、誘導地点を実際に通過した場合の他、現在位置と誘導地点との間の距離が減少から増加に転じた場合にも、誘導地点を通過したと判定することにより行う。
以上、制御部16が行う経路案内処理について説明した。
以下、このような経路案内処理の処理例を示す。
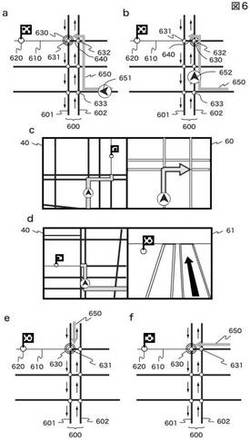
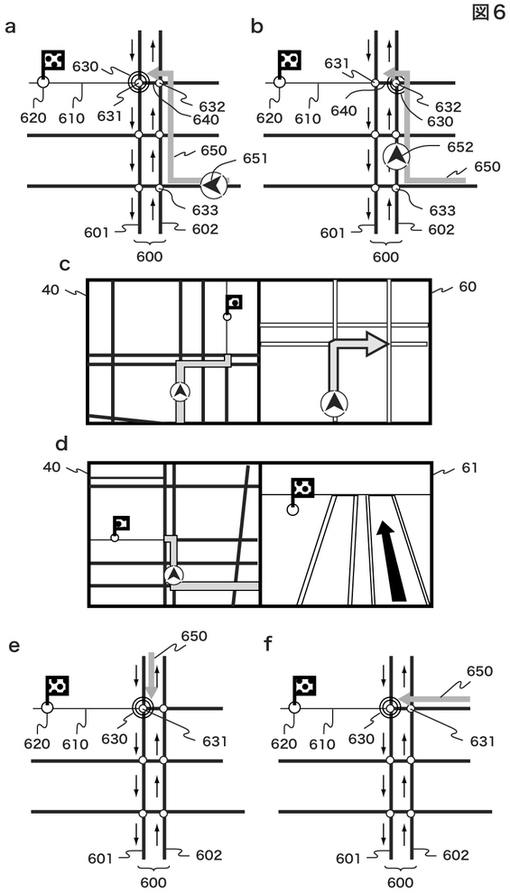
いま、図6aに示すように、地図データ上において、上り方向の道路601と、下り方向の道路602からなる二条線道路600が存在し、道路601に連結する車両進入不可能道路610上にユーザによって目的地620が設定された場合を考える。この場合、車両進入不可能道路610に自動車は進入できないので、車両進入不可能道路610の車両進入可能な最寄り地点となる、道路601の車両進入不可能道路610との連結ノード631が誘導地点に設定されることになる。
【0043】
そして、この場合において、図示するように、道路602を走行後、道路602上のノード632と、道路601上の誘導地点に設定されているノード631とを連結するリンク640を走行して、誘導地点のノード631に到る誘導経路650が設定されているときを考える。
【0044】
この場合、車両の現在位置が図6aの651で示す、最後から二番目の進路変更ポイントとなるノード633まで所定距離以内の地点に達すると(ステップ508)、図6cに示すように、ノード633周辺を表した地図上でノード633における進路変更方向を矢印によって表した進路変更案内図60が表示装置4に表示され、「300m先の交差点を右折です」といったような音声案内メッセージがスピーカ2から出力される(ステップ518)。なお、図6cでは、進路変更案内図60を表示する際に、案内画像40の表示サイズを縮小した上で、案内画像40と共に進路変更案内図60を表示するようにしている。
【0045】
次に、車両が最後から二番目の進路変更ポイントとなるノード633を通過して、次に通過する進路変更ポイントであるノード632が誘導地点のノード631に到る前の最後の進路変更ポイントとなると(ステップ506)、誘導地点のノード631に到達する前に最後に走行するリンク640が、二条全道路を形成する上り下り方向の二つの道路601、602のリンクを連結するリンクであって(ステップ512)、その直前に通過するリンクが当該最後に走行するリンク640が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路602のリンクであるので(ステップ514)、到達判定地点630が、図6aの誘導地点に設定されているノード631から、図6bに示すように誘導地点に設定されているノード631の前に通過するノード632に変更され、この到達判定地点630に二条線対応フラグが設定される(ステップ516)。
【0046】
そして、その後、車両の現在位置が図6bの652で示す、到達判定地点630まで所定距離以内の地点に達すると(ステップ510)、図6dに示すように、目的地案内画面61が表示装置4に表示されると共に(ステップ524)、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージがスピーカ2から出力される(ステップ526)。なお、ここでは、到達判定地点630に、二条線対応フラグが設定されているので、図3b4の目的地案内画面を表示する。
【0047】
なお、図6dでは、目的地案内画面61を表示する際に、案内画像40の表示サイズを縮小した上で、案内画像40と共に目的地案内画面61を表示するようにしている。
結果、このように誘導地点631前の最後の進路変更ポイントとなるノード632における進路変更を案内せずに、最後の進路変更ポイントの前で経路案内を終了するので、先に図11bに示したように、ノード632における進路変更を案内する進路変更案内図を表示して進入不可能道路610を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまうことが避けられる。
【0048】
なお、図6aと同様にノード631が誘導地点として設定されている場合であっても、誘導経路が図6eやfに示すように設定されている場合には、到達判定地点630は、誘導地点のノード631のままとなる。図6eの場合は、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するリンクでないためにステップ512の条件を満たさず、図6fの場合は最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の道路601、602のうちのいずれの道路のリンクでもないためにステップ514の条件を満たさないからである。
【0049】
そして、図6e、fの場合には、最後の進路変更ポイントにおける進路変更を案内しても、進入不可能道路610を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまうことはない。
【0050】
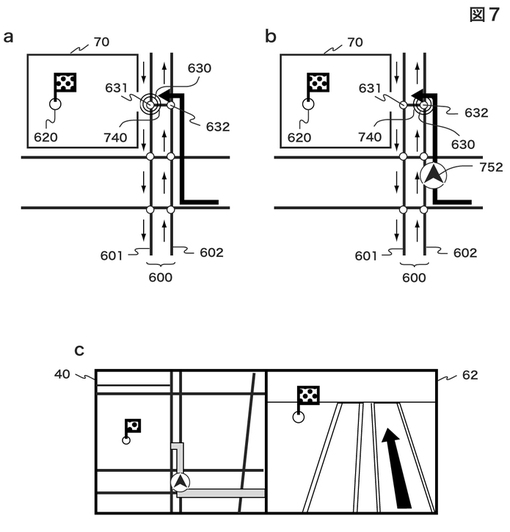
なお、図7aに示すように、地図データ上において、上り方向の道路601と、下り方向の道路602からなる二条線道路600が存在し、施設70内の地点が目的地620として設定されたために、施設に対して標準誘導地点として定義されているノード631が誘導地点として設定されている場合において、図示するように、道路602を走行後、道路602上のノード632と、道路601上の誘導地点に設定されているノード631とを連結するUターン専用の740を走行して、誘導地点のノード631に到る誘導経路650が設定されているときも、図6aに示した場合と同様であり、到達判定地点630は、図7aの誘導地点に設定されているノード631から、図7bに示すように誘導地点に設定されているノード631の前に通過するノード632に変更され、この到達判定地点630に二条線対応フラグが設定されることになる。
【0051】
そして、その後、車両の現在位置が図7bの752で示す、到達判定地点630まで所定距離以内の地点に達した時点で、図7cに示すように、目的地案内画面61が表示装置4に表示されると共に、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージがスピーカ2から出力されることになる。なお、ここでも、到達判定地点630に、二条線対応フラグが設定されているので、図3b4の目的地案内画面を表示する。
【0052】
したがって、やはり、誘導地点630前の最後の進路変更ポイントとなるノード632における進路変更を案内せずに、最後の進路変更ポイントの前で経路案内を終了するので、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまったり、Uターン専用の道路上で経路案内が終了することを避けることができることになる。
【0053】
ところで、以上では、二条線道路を形成するリンク間を連結するリンクの端点となるノードに、二条線道路を形成するリンクから当該連結するリンクへ進入する誘導経路の誘導地点が設定された場合の問題に、到着判定地点を誘導地点から変更することにより対応したが、これは誘導経路設定時に誘導地点自体を変更することにより対応するようにしてもよい。
【0054】
すなわち、この場合には、先に図3に示した誘導経路設定処理に代えて図8に示す誘導経路設定処理を、先に図5に示した経路案内処理に代えて図9に示す経路案内処理を行うようにすればよい。
以下、図8に示した誘導経路設定処理と、図9に示した経路案内処理について説明する。
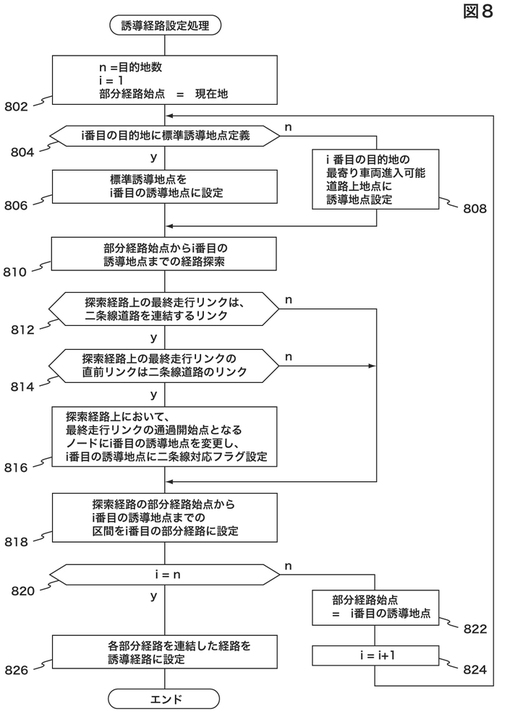
まず、図8の誘導経路設定処理について説明する。
図示するように、この誘導経路設定処理では、まず、メモリ14に設定されている現在位置を、部分経路始点に設定する(ステップ802)。
そして、到達すべき順に各目的地(最終目的地及び中間目的地)に順次着目し(ステップ820、824)、着目した目的地について順次以下の処理を行う。
すなわち、まず、着目した目的地の誘導地点を算出する(ステップ804、806、808)。ここで、着目した目的地が施設または施設内の地点であって、当該施設の施設レコードに標準誘導地点が定義されている場合には(ステップ804)、定義されている標準誘導地点を、着目した目的地の誘導地点として算出し(ステップ806)、その他の場合は、着目した目的地に最寄りの車両進入可能道路上の地点を誘導地点として算出する(ステップ808)。
【0055】
次に、設定されている部分経路始点から誘導地点までの経路を、必要地理的範囲の地図データの基本地図データの道路ユニットを記憶装置11から読み出し、距離最小、時間最小などコストモデルに基づいて探索し探索経路とする(ステップ810)。
次に、探索経路上の探索経路の終点となる誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであるかどうかを調べる(ステップ812)。
そして、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクでなければ(ステップ812)、ステップ818に進む。
一方、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであれば(ステップ812)、さらに、探索経路上の当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであるかどうかを調べ(ステップ814)、二条線道路を形成する上り下り方向の二つの道路のうちのいずれの道路のリンクでなければ、ステップ818に進む。
【0056】
一方、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであれば(ステップ814)、探索経路に従って走行した場合に当該最後に走行するリンクの走行開始点となるノードに誘導地点を更新し、更新した誘導地点に二条線対応フラグをセットする(ステップ816)。そして、ステップ818に進む。
【0057】
但し、ステップ816は、着目した誘導地点に自動車が走行不可能なリンクが連結している場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。または、ステップ816は、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。または、ステップ816は、着目した誘導地点に自動車が走行不可能なリンクが連結しているか、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。
【0058】
次に、このようにしてステップ818に進んだならば、探索経路の部分経路開始点から誘導地点までの間の区間を部分経路に設定する。
そして、着目している目的地が最終目的地でなければ、部分経路始点を、着目している目的地について算出した誘導地点に更新し(ステップ822)、現在着目している目的地についての処理を終了し、次に到達すべき目的地に着目した処理に進む。
そして、全て目的地について以上のようにして部分経路が探索されたならば、それまでに探索した部分経路を連結した経路を誘導経路として、メモリ14に設定すると共に、各部分経路の終点となっている誘導地点をメモリ14に設定する(ステップ826)。
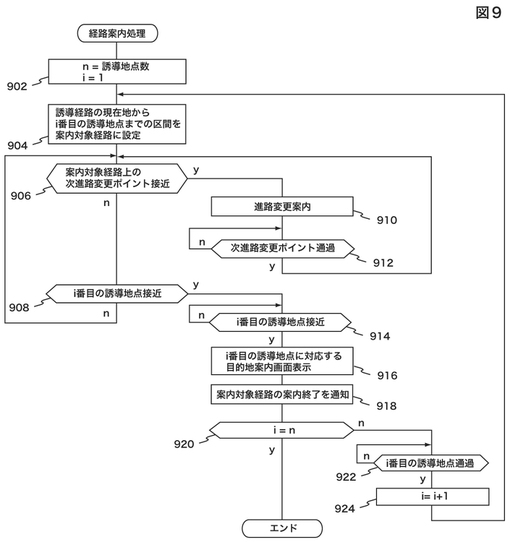
次に、図9の経路案内処理について説明する。
図示するように、この経路案内処理では、メモリ14に設定されている各誘導地点に到達すべき順に順次着目し(ステップ902、920、924)、着目した各誘導地点について順次以下の処理を行う。
すなわち、まず、現在位置から着目した誘導地点までの区間を案内対象経路に設定する(ステップ904)。
そして、誘導経路上次に通過する進路変更ポイントへの所定距離(たとえば、300m)内への接近の発生(ステップ906)と、着目した誘導地点前の最後の進路変更ポイントの通過(ステップ908)とを監視する。
そして、現在位置の誘導経路上次に通過する進路変更ポイントへの所定距離内への接近が発生した場合には(ステップ906)、当該進路変更ポイントにおける進路変更の案内を上述のように行い、進路変更ポイントの通過を待って(ステップ912)、ステップ906、908の監視に戻る。
【0059】
一方、着目した誘導地点前の最後の進路変更ポイントの通過が発生したならば(ステップ908)、着目した誘導地点への所定距離(たとえば、300m)内への接近の発生を待って(ステップ914)、予め用意しておいた図3b1からb4に示すような目的地案内画面をGUI制御部18を介して表示装置4に所定期間表示する(ステップ916)。
【0060】
ここで、本経路案内処理では、図3b1、b2、b3の目的地案内画面は、着目した誘導地点に二条線対応フラグが設定されていない場合に用い、図3b4の目的地案内画面は、着目した誘導地点に二条線対応フラグが設定されている場合に用いる。また、図3b1の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、およそ正面のリンク上にあるときに用い、図3b2の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、左側のリンク上または走行中道路から左側に離れた位置にあるときに用い、図3b3の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、右側のリンク上または走行中道路から右側に離れた位置にあるときに用いる。なお、着目する誘導地点に対応する目的地とは、図8に示した誘導経路設定処理において、着目する誘導地点が算出された目的地である。
【0061】
そして、次に、案内対象経路の案内の終了を、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージをスピーカ2に出力させることによりユーザに通知する(ステップ918)。
そして、着目する誘導地点が、最後の誘導地点であれば(ステップ920)、着目する誘導地点についての処理を終了すると共に、経路案内処理を終了する。
一方、着目する誘導地点が、最後の誘導地点でなければ、着目する誘導地点への通過を待って(ステップ922)、着目する誘導地点についての処理を終了し、次の誘導地点に着目したステップ904からの処理に進む。
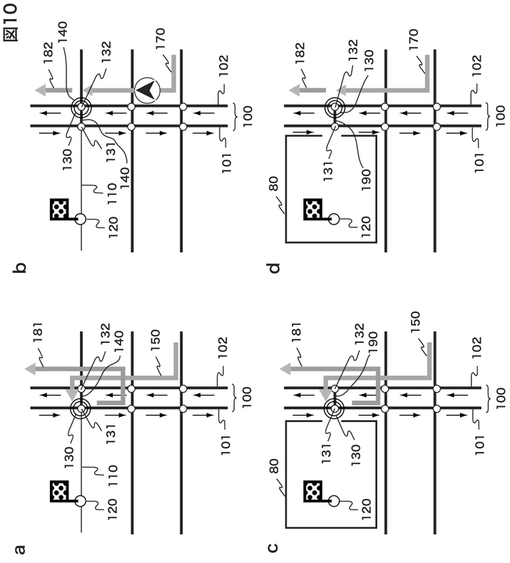
ここで、以下に、図8の誘導経路設定処理との処理例を示す。
いま、図10aに示すように、地図データ上において、上り方向の道路101と、下り方向の道路102からなる二条線道路100が存在し、道路101に連結する車両進入不可能道路110上にユーザによって目的地120が設定された場合を考える。この場合、車両進入不可能道路110に自動車は進入できないので、車両進入不可能道路110の車両進入可能な最寄り地点となる、道路101の車両進入不可能道路110との連結ノード131が誘導地点130に設定され(ステップ804、808)、この誘導地点に設定されたノード131までの経路が、まず探索される(ステップ810)。
【0062】
そして、この場合において、図示するように、道路102を走行後、道路102上のノード132と、道路101上の誘導地点に設定されているノード131とを連結するリンク140を走行して、誘導地点のノード131に到る経路が探索経路150として探索されたときを考える。
【0063】
この場合、探索経路上の探索経路の終点となるノード131に到達する前に最後に走行するリンク140が、二条全道路を形成する上り下り方向の二つの道路101、102のリンクを連結するリンクであり(ステップ812)、最後に走行するリンク140の直前に通過するリンクが、当該最後に走行するリンク140が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路102のリンクであるので(ステップ814)、図10bに示すように、最後に走行するリンク140の走行開始点となるノード132に誘導地点130が更新され、更新した誘導地点130に二条線対応フラグがセットされる(ステップ816)。
【0064】
そして、図10aに示す探索経路150の部分経路開始点から、図10bに示す更新後の誘導地点130のノード132までの間の区間が、誘導経路の目的地120に対応する誘導地点130に到る部分を構成する部分経路170に設定される(ステップ818)。
なお、図10aから図10bに示すように、誘導地点130がノード131からノード132に変更されると、当該誘導地点130が算出された目的地120が中間目的地(経由地)である場合には、図10bに示すように、当該誘導地点130に設定されたノード132が、次の目的地までの部分経路182の始点として設定され当該次の目的地までの部分経路182が設定されることになる。一方、誘導地点130がノード131からノード132に変更されなかった場合には、図11aに示すように、誘導地点130に設定されたノード131が、次の目的地までの部分経路181の始点として設定され当該次の目的地までの部分経路181が設定されることになる。
【0065】
すなわち、次の目的地までの部分経路も、誘導地点の変更によって変化することになる。
さて、ここで、図10cに示すように、地図データ上において、上り方向の道路101と、下り方向の道路102からなる二条線道路100が存在し、施設80内の地点が目的地120として設定されたために、施設に対して標準誘導地点として定義されているノード131が誘導地点として設定されている場合において、図示するように、道路102を走行後、道路102上のノード132と、道路101上の誘導地点に設定されているノード131とを連結するUターン専用の190を走行して、誘導地点のノード131に到る経路150が、探索経路として探索されたときも、図10aに示した場合と同様であり、誘導地点130は、図10cの誘導地点に設定されているノード131から、図10dに示すようにノード131の前に通過するノード132に変更され、この到達判定地点130に二条線対応フラグが設定される。
【0066】
そして、図10cに示す探索経路150の部分経路開始点から、図10dに示す更新後の誘導地点130のノード132までの間の区間が、目的地120に対応する誘導地点130に到る部分を構成する部分経路170に設定される。また、図10cから図10dに示すように、誘導地点130がノード131からノード132に変更されると、当該誘導地点130が算出された目的地120が中間目的地(経由地)である場合には、次の目的地までの部分経路は、図10dに部分経路182と示すようになり、この部分経路182は、図10cに示す誘導地点130がノード131からノード132に変更されなかった場合の部分経路181とは異なるものとなる。
【0067】
したがって、このような図8に示す誘導経路設定処理によれば、図9の経路案内処理において、誘導地点をそのまま到達判定地点として進路変更案内や目的地案内を行えば、図3に示した誘導経路設定処理や図5に示した経路案内処理と同様の進路変更案内や目的地案内が行われることになり、進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまったり、Uターン専用の道路上で経路案内が終了することを避けることができる。
【0068】
以上、本発明の実施形態について説明した。
なお、以上の実施形態では、異なる路線を形成する上り方向に一方通行の道路と下り方向に一方通行の道路との二つの道路が並行に敷設されている場合、この二つの道路も二条線道路と見なして以上の誘導経路設定処理や経路案内処理を適用するようにしてもよい。
【図面の簡単な説明】
【0069】
【図1】本発明の実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーション装置が備える地図データを示す図である。
【図3】本発明の実施形態に係る誘導経路設定処理を示すフローチャートである。
【図4】本発明の実施形態に係るナビゲーションシステムの表示例を示す図である。
【図5】本発明の実施形態に係る経路案内処理を示すフローチャートである。
【図6】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図7】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図8】本発明の実施形態に係る誘導経路設定処理の他の構成例を示すフローチャートである。
【図9】本発明の実施形態に係る経路案内処理の他の構成例を示すフローチャートである。
【図10】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図11】従来の経路案内の処理例を示す図である。
【符号の説明】
【0070】
1…ナビゲーション装置、2…スピーカ、3…操作部、4…表示装置、5…車両状態センサ、6…GPS受信機、11…記憶装置、12…現在状態算出部、13…ルート探索部、14…メモリ、15…音声生成部、16…制御部、17…案内画像生成部、18…GUI制御部、40…案内画像。
【技術分野】
【0001】
本発明は、自動車に搭載されるナビゲーション装置において経路案内を行う技術に関するものである。
【背景技術】
【0002】
自動車に搭載されるナビゲーション装置において経路案内を行う技術としては、目的地到着が検出されるまで経路案内を行う技術が知られている。また、このような経路案内を行うナビゲーション装置において、目的地到着を検出する技術としては、目的地が車両進入禁止区域内に設定されていない場合には、自動車が第1の所定距離まで目的地に近づいた時点で目的地到着を検出すると共に、目的地が車両進入禁止区域内に設定されている場合には、自動車が前記第1の所定の距離よりも大きく設定した第2の所定の距離まで目的地に近づいた時点で目的地到着を検出するようにした技術が知られている(たとえば、特許文献1)。
【特許文献1】特開2005-241561号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
一つの路線を形成する上り方向の道路と下り方向の道路が離間した形態で並行に敷設されている場合などには、道路網を表す地図データにおいて、各方向の道路がそれぞれ独立した道路として表現されることがある。ここで、以下では、便宜上、このような地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された道路を「二条線道路」と呼ぶことにする。
【0004】
さて、ナビゲーション装置において、経路終了地点到着の検出を行い、当該検出をもって経路案内を終了する場合、一般的には、経路終了地点到着の検出は、経路終了地点前の最後の進路変更(左折/右折等)を案内した後に、経路終了地点に接近したときに行うようにすることが、ユーザを確実に経路終了地点まで誘導する上で好ましい。
【0005】
しかしながら、このようにすると、二条線道路上に経路終了地点が設定されている場合には、次のような問題が生じる。
すなわち、いま、図11aに示すように、地図データ上において、上り方向の道路1101と、下り方向の道路1102からなる二条線道路1100が存在し、道路1101に連結する車両進入不可能道路1110上にユーザによって目的地1120が設定された場合、車両進入不可能道路1110に自動車は進入できないので、車両進入不可能道路1110の車両進入可能な最寄り地点となる、道路1101の車両進入不可能道路1110との連結ノード1130に経路終了地点に設定されることになる。
【0006】
そして、この場合において、図示するように、道路1102を走行後、道路1102上のノード1160と、道路1101上の経路終了地点1130に設定されているノードとを連結する道路区間1140を走行して、経路終了地点1130に到る経路1150が設定されているときを考える。
【0007】
このとき、経路終了地点前の最後の進路変更(左折/右折等)地点は、道路1102と道路区間1140の連結ノード1160となる。
そこで、この連結ノード1160に自動車の現在位置1170が接近したときに、図11bに示すように、連結ノード1160における進路変更方向を連結ノード1160周辺を表した地図1180上で矢印1190によって案内するようにすると、道路1102と道路1101が二条線道路であり、これらを連結する道路区間1140が極めて短いために、図示するように矢印1190の先端が進入不可能道路1110まで達してしまい、進入不可能道路1110を走行できるものとユーザに誤解を与えてしまうことがある。
【0008】
また、この場合、道路区間1140上で、経路終了地点への接近による経路終了地点到着の検出が行われ経路案内を終了することになるが、経路案内終了に伴って経路終了地点到着や経路案内の終了を音声メッセージによって案内する場合などには、道路区間1140が極めて短いために、実際の経路終了地点1130到着までに、当該音声メッセージによる案内が間に合わない場合がある。また、道路区間1140が、図11cに示すように、二条線道路1100を形成する道路1101と道路1102間のUターン専用の道路である場合には、Uターン専用の道路上で経路案内が終了することになるため、ユーザにとって中途半端な経路案内となってしまう。
【0009】
そこで、本発明は、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された、一つの路線を形成する道路上に、ユーザを案内すべき地点が設定された場合にも、ユーザに対して良好な経路案内を行えるようにすることを課題とする。
【課題を解決するための手段】
【0010】
前記課題達成のために、本発明は、自動車に搭載されるナビゲーション装置に、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、前記自動車の現在位置を算出する現在位置算出部と、前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを設け、前記到着判定部において、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とするようにしたものである。
【0011】
このようなナビゲーション装置によれば、誘導経路が、二条線道路を形成する第1の道路と第2の道路のうちの第1の道路から、当該第1の道路と第2の道路とを連結する連結道路を通って、当該連結道路と当該第2の道路との連結地点に設定された経路終了地点で終了するものであった場合には、前記二条線道路を形成する第1の道路と前記連結道路との連結地点に接近した時点で経路案内を終了する。
【0012】
したがって、前記第1の道路から連結道路に進入する進路変更を案内して、前記第2の道路に連結している進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが経路終了地点の到着までに間に合わなくなってしまったり、連結道路の道路上で経路案内が中途半端に終了することを避けることができる。
【0013】
なお、このようなナビゲーション装置は、前記到着判定部において、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とするように構成してもよい。また、このようなナビゲーション装置は、前記到着判定部において、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とするように構成してもよい。
【0014】
また、以上のようなナビゲーション装置に、前記到着判定部が、前記経路誘導部の前記経路案内を終了させるときに、前記目的地の位置を案内する目的地案内部を備えるようにしてもよい。
また、前記課題達成のために、本発明は、自動車に搭載されるナビゲーション装置に、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、前記自動車の現在位置を算出する現在位置算出部と、前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを設け、前記誘導経路設定部において、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定するように構成したものである。
【0015】
このようなナビゲーション装置によれば、探索した経路終了地点への経路が二条線道路を形成する第1の道路と第2の道路のうちの第1の道路から、当該第1の道路と第2の道路と連結する連結道路を通って、当該連結道路と当該第2の道路との連結地点に設定された経路終了地点で終了するものであった場合には、前記二条線道路を形成する第1の道路と前記連結道路との連結地点に経路終了地点を変更し、変更後の経路終了地点までの経路を誘導経路として設定する。
【0016】
したがって、前記第1の道路から連結道路に進入する経路は誘導経路に含まれず、前記第1の道路から連結道路に進入する進路変更を案内して、前記他方の道路に連結している進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが経路終了地点の到着までに間に合わなくなってしまったり、連結道路の道路上で経路案内が中途半端に終了することを避けることができる。
【0017】
ここで、このようなナビゲーション装置は、前記誘導経路設定部において、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更するように構成してもよい。また、このようなナビゲーション装置は、前記誘導経路設定部において、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更するように構成してもよい。
【0018】
なお、以上のような各ナビゲーション装置は、前記地図データが表す道路網上で、走行方向が反対向きの隣接した二つの道路を、前記二条線道路と同様に扱って、以上の各処理を行うように構成してもよい。
【発明の効果】
【0019】
以上のように本発明によれば、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された、一つの路線を形成する道路上にユーザを案内すべき地点が設定された場合にも、ユーザに対して良好な経路案内を行えるようになる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施形態について、自動車の通行区分が右側通行である場合を例にとり説明する。
図1に、本実施形態に係るナビゲーションシステムの構成を示す。
ナビゲーションシステムは、自動車に搭載されるシステムであり、図示するように、ナビゲーション装置1と、スピーカ2と、操作部3と、表示装置4と、車両状態センサ5と、GPS受信機6とを備えて構成される。
ここで、車両状態センサ5は、角加速度センサや地磁気センサなどである方位センサや、車速パルスセンサなどである車速センサなどの各種車両状態を検出する各種センサである。
そして、ナビゲーション装置1は、地図を表す地図データを記憶したHDDなどの記憶装置11、現在状態算出部12、ルート探索部13、メモリ14、音声を生成しスピーカ2から出力する音声生成部15、制御部16、案内画像生成部17、操作部3や表示装置4を用いたユーザとの間の入出力を制御するGUI制御部18を備えている。
【0021】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたコンピュータであって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0022】
次に、図2に、記憶装置11に記憶される地図データの内容を示す。
図示するように、地図データは、地図データのバージョン等を記述した管理データ、各道路路線の情報を表す路線データ、施設データ、地図を表す基本地図データを含んで構成される。
そして、路線データは、路線毎に設けられた路線レコードを有し、各路線レコードには対応する路線の識別子となる路線番号と、対応する路線の名称である路線名称が登録されている。
次に、施設データは、予め選定した施設毎に設けられた施設レコードを有し、各施設レコードには、対応する施設の識別子となる施設識別子と、対応する施設の名称を表す施設名称と、対応する施設の公園やレストランといった種別を表す施設種別と、標準誘導地点と、対応する施設の住所や電話番号やその他の各種情報が登録される施設詳細情報が格納されている。ここで、標準誘導地点とは、対応する施設または施設内の位置が目的地としてユーザによって指定された場合に、ユーザを誘導する地点、すなわち、当該目的地までの経路の終了地点として設定する地点を表し、当該標準誘導地点としては、通常、対応する施設の入り口に最も近い道路(後述するリンク)上の地点が設定される。
【0023】
次に、基本地図データは、道路ネットワークを表す道路ユニットと、表示地図を構成する図形オブジェクト(道路図形や施設図形や地形図形等)を表すポリゴンユニットと、表示地図を構成するテキストオブジェクト(地名や道路名称等)を表すテキストユニットとを有する。
ここで、道路ユニットでは、交差点を表すノードと、ノード間を連結するリンクの集合として道路網を定義しており、道路ユニットは、ノード毎に設けられたノードデータと、リンク毎に設けられたリンクデータとを有する。
また、各ノードデータには、対応するノードの識別子となるノード番号、対応するノードの各種属性を表すノード属性、対応するノードの位置を表すノード座標、対応するノードに接続するリンクを表す接続リンク情報、対応するノードに一本のリンクを介して接続する他のノードを表す接続ノード情報とを含む。
【0024】
また、各リンクデータには、対応するリンクの識別子となるリンク番号、対応するリンクの各種属性を表すリンク属性、対応するリンクの属する路線の路線番号を示す所属路線番号、対応するリンクの始点となるノードのノード番号を表す始点ノードと、対応するリンクの終点となるノードのノード番号を表す終点ノード、対応するリンクの形状を表すリンク形状データとが登録される。また、リンク属性には、対応するリンクが、車両進入不可能道路のリンクであるか否かや、対応するリンクが、地図データ上で、上り、下りの道路がそれぞれ独立した道路として表現された道路(以下、「二条線道路」と記す)を形成するリンクであるか否かや、対応するリンクを走行できる方向(始点ノードから終点ノードに向かう方向のみ、双方向など)などが登録されている。
【0025】
次に、ポリゴンユニットには、表示地図を構成する図形オブジェクト(道路図形や施設図形や地形図形等)毎に設けられたポリゴンデータを有し、各ポリゴンデータは、対応する図形オブジェクトの識別子であるポリゴン識別子、対応する図形オブジェクトの道路図形、施設図形、地形図形といった図形種別を表すポリゴン種別、対応するポリゴンの形状と地図上の配置を表す形状配置データ、対応する図形オブジェクトが施設図形である場合に当該施設の施設識別子を表す対応施設識別子とが登録される。
【0026】
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、車両状態センサ5やGPS受信機6の出力から推定される現在位置に対して、記憶装置11から読み出した地図データの基本地図データの道路ユニットが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向とを、それぞれ現在位置、現在進行方位として決定し、メモリ14に設定する。
【0027】
また、制御部16は、ユーザから操作部3、GUI制御部18を介して一つの目的地の設定を受け付け、これをメモリ14にセットする。ここで、目的地としては、最終目的地の他に1または複数の中間目的地(経由地)の設定も受け付けることができる。そして、最終目的地までの誘導経路をルート探索部13に探索させる。
【0028】
ルート探索部13は、誘導経路の探索を制御部16から指示されたならば、図3に示す誘導経路設定処理を行う。
すなわち、経路設定処理では、まず、メモリ14に設定されている現在位置を、部分経路始点に設定する(ステップ302)。
そして、到達すべき順に各目的地(中間目的地および最終目的地)に順次着目し(ステップ310、318)、着目した目的地について順次以下の処理を行う。
すなわち、まず、着目した目的地の誘導地点を算出する(ステップ304、306、314)。ここで、着目した目的地が施設または施設内の地点であって、当該施設の施設レコードに標準誘導地点が定義されている場合には(ステップ304)、定義されている標準誘導地点を、着目した目的地の誘導地点として算出し(ステップ306)、その他の場合は、着目した目的地に最寄りの車両進入可能道路上の地点を誘導地点として算出する(ステップ314)。なお、目的地が施設である場合の標準誘導地点は、当該施設の施設レコードの標準誘導地点として求める。また、目的地が施設内の地点である場合の標準誘導地点は、たとえば、案内画像上で目的地として指定された位置を含む図形オブジェクトのポリゴンデータの対応施設識別子を施設識別子とする施設レコードの標準誘導地点として求める。
【0029】
次に、設定されている部分経路始点から誘導地点までの経路を、必要地理的範囲の地図データを記憶装置11から読み出し、距離最小、時間最小などコストモデルに基づいて部分経路として探索する(ステップ308)。
そして、着目している目的地が最終目的地でなければ、部分経路始点を、着目している目的地について算出した誘導地点に更新し(ステップ316)、現在着目している目的地についての処理を終了し、次に到達すべき目的地に着目した処理に進む。
そして、全て目的地について以上のようにして部分経路が探索されたならば、それまでに探索した部分経路を連結した経路を誘導経路として、メモリ14に設定すると共に、各部分経路の終点となっている誘導地点をメモリ14に設定する(ステップ312)。
このような誘導経路設定処理の結果、メモリ14に設定されている現在位置から最終目的地までの、メモリ14に設定されている各中間目的地を経由する最小コストの経路が誘導経路としてメモリ14にセットされることになる。
図1に戻り、制御部16は、メモリ14にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ14にセットされている目的地や誘導経路をクリアする処理を行う。
また、案内画像生成部17は、メモリ14にセットされている現在位置を参照し、地図データが示す現在位置やユーザが指定した地点周辺に設定した地図表示範囲内の地図を、所定の縮尺で表す地図画像を生成する。また、案内画像生成部17は、描画した地図画像上に、メモリ14にセットされている現在位置を表す現在位置マークを描画し、案内画像としてGUI制御部18を介して表示装置4に表示する処理を繰り返し行う。ここで、メモリ14に目的地や誘導経路がセットされている場合には、案内画像生成部17は、誘導経路の地図表示範囲内の部分を表す誘導経路図形も案内画像に含めて表示する。また、地図表示範囲内に目的地が含まれる場合には、さらに、目的地を表す目的地マークも案内画像に含めて表示する。
【0030】
図4aに、このようにして表示される案内画像の例を示す。
図示するように、この例では、案内画像40は、現在位置周辺の地図を表す地図画像41上に、現在位置を表す現在位置マーク42が表されたものとなる。また、誘導経路や目的地がセットされている場合には、案内画像40は、誘導経路を表す誘導経路図形43を含む。また、地図表示範囲内に目的地が含まれる場合には、さらに、目的地マーク44も案内画像40に含まれることになる。
【0031】
次に、以上のような構成において、制御部16は、メモリ14に目的地や誘導経路が設定されたならば、以下に示す経路案内処理を開始する。
図5に、この経路案内処理の手順を示す。
図示するように、制御部16は、この処理において、メモリ14に設定されている各誘導地点に到達すべき順に順次着目して(ステップ502、528、532)以下の処理を行う。
すなわち、まず、着目した誘導地点を到達判定地点に設定すると共に、誘導経路の現在位置から着目した誘導地点までの区間を案内対象経路に設定する(ステップ504)。
そして、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントであるかどうかを調べる(ステップ506)。ただし、ステップ506では、案内対象経路上に今後通過する進路変更ポイントが存在しない場合には、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントでないものと判定するようにする。
【0032】
そして、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントでなければ(ステップ506)、誘導経路上次に通過する進路変更ポイントへの所定距離(たとえば、300m)内への接近の発生(ステップ508)と、案内経路上の到達判定地点前の最後の進路変更ポイントの通過(ステップ510)とを監視する。
【0033】
一方、案内対象経路上の次に通過する進路変更ポイントが、案内経路上の最後の進路変更ポイントであれば(ステップ506)、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであるかどうかを調べる(ステップ512)。
【0034】
ここでは、当該最後に走行するリンクのリンクデータと、当該最後に走行するリンクの両端のノードに連結する各リンクのリンクデータを参照し、最後に走行するリンクが、二条線道路を形成するリンクでなく、かつ、最後に走行するリンクの一端のノードと他端のノードに、それぞれ、二条線道路を形成するリンクが連結している場合に、当該最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであると判定する。なお、各リンクが二条線道路を形成するリンクであるかどうかは、当該リンクのリンクデータのリンク属性より求めることができる。
【0035】
または、当該最後に走行するリンクの一端に連結するリンクと、他端に連結するリンクとの、リンクが属する路線の路線名称が等しいペアが存在し、かつ、当該ペアのリンクが属する路線の路線名称が、当該最後に走行するリンクが属する路線の路線名称と異なる場合に、当該最後に走行するリンクが、二条線道路を形成する上り下り方向の二つの道路を連結するリンクであると判定するようにしてもよい。なお、各リンクの属する路線の路線名称は、当該リンクのリンクデータに登録されて所属路線番号が路線番号として登録されている路線レコードに登録された路線名称として求めることができる。
【0036】
そして、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクでなければ(ステップ512)、ステップ508、510の監視に進む。
一方、案内対象経路上の着目した誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであれば(ステップ512)、さらに、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであるかどうかを調べ(ステップ514)、二条線道路を形成する上り下り方向の二つの道路のうちのいずれの道路のリンクでもなければ、ステップ508、510の監視に進む。
【0037】
一方、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであれば(ステップ514)、案内対象経路に従って走行した場合に当該最後に走行するリンクの走行開始点となるノードに到達判定地点を更新し、更新した到達判定地点に二条線対応フラグをセットする(ステップ516)。そして、ステップ508、510の監視に進む。
【0038】
但し、ステップ516は、着目した誘導地点に自動車が走行不可能なリンクが連結している場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。または、ステップ516は、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。または、ステップ516は、着目した誘導地点に自動車が走行不可能なリンクが連結しているか、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ508、510の監視に進むようにしてもよい。なお、リンクが自動車が走行不可能なリンクであるか否かや、リンクがUターン専用のリンクであるか否かは、当該リンクのリンクデータのリンク属性より求めることができる。
【0039】
次に、ステップ508、510の監視中に、現在位置の誘導経路上次に通過する進路変更ポイントへの所定距離内への接近が発生した場合には(ステップ508)、当該進路変更ポイントにおける進路変更の案内を行い(ステップ518)、進路変更ポイントの通過を待って(ステップ520)、ステップ506からの処理に戻る。ここで、当該進路変更ポイントにおける、進路変更の案内は、たとえば、進路変更ポイントにおける進路変更方向を、進路変更ポイント周辺を表した地図上で矢印によって表した進路変更案内図を、GUI制御部18を介して表示装置4に表示すると共に、音声生成部15に、たとえば、「300m先の交差点を左折です」といったような音声案内メッセージをスピーカ2に出力させることにより行う。なお、進路変更案内図は、進路変更ポイントを通過したならば消去する。
【0040】
一方、ステップ508、510の監視中に、到達判定地点前の最後の進路変更ポイントの通過が発生したならば(ステップ510)、設定されている到達判定地点への所定距離(たとえば、300m)内への接近を待って(ステップ522)、予め用意しておいた図3b1からb4に示すような目的地案内画面をGUI制御部18を介して所定期間、表示装置4に表示する(ステップ524)。
【0041】
ここで、図3b1、b2、b3は、到着判定地点に二条線対応フラグが設定されていない場合に用いる目的地案内画面である。また、図3b1は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、およそ正面のリンク上にあるときに用いる目的地案内画面であり、図3b2は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、左側のリンク上または走行中道路から左側に離れた位置にあるときに用いる目的地案内画面であり、図3b3は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、右側のリンク上または走行中道路から右側に離れた位置にあるときに用いる目的地案内画面である。そして、図3b4は、到着判定地点に二条線対応フラグが設定されている場合に用いる目的地案内画面である。なお、着目する誘導地点に対応する目的地とは、図3に示した誘導経路設定処理において、着目する誘導地点が算出された目的地である。
【0042】
そして、次に、案内対象経路の案内の終了を、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージをスピーカ2に出力させることによりユーザに通知する(ステップ526)。
そして、着目する誘導地点が、最後の誘導地点であれば(ステップ528)、着目する誘導地点についての処理を終了すると共に、経路案内処理を終了する。
一方、着目する誘導地点が、最後の誘導地点でなければ、着目する誘導地点への通過を待って(ステップ530)、着目する誘導地点についての処理を終了し、次の誘導地点に着目したステップ504からの処理に進む。
ここで、誘導地点の通過の判定は、たとえば、誘導地点を実際に通過した場合の他、現在位置と誘導地点との間の距離が減少から増加に転じた場合にも、誘導地点を通過したと判定することにより行う。
以上、制御部16が行う経路案内処理について説明した。
以下、このような経路案内処理の処理例を示す。
いま、図6aに示すように、地図データ上において、上り方向の道路601と、下り方向の道路602からなる二条線道路600が存在し、道路601に連結する車両進入不可能道路610上にユーザによって目的地620が設定された場合を考える。この場合、車両進入不可能道路610に自動車は進入できないので、車両進入不可能道路610の車両進入可能な最寄り地点となる、道路601の車両進入不可能道路610との連結ノード631が誘導地点に設定されることになる。
【0043】
そして、この場合において、図示するように、道路602を走行後、道路602上のノード632と、道路601上の誘導地点に設定されているノード631とを連結するリンク640を走行して、誘導地点のノード631に到る誘導経路650が設定されているときを考える。
【0044】
この場合、車両の現在位置が図6aの651で示す、最後から二番目の進路変更ポイントとなるノード633まで所定距離以内の地点に達すると(ステップ508)、図6cに示すように、ノード633周辺を表した地図上でノード633における進路変更方向を矢印によって表した進路変更案内図60が表示装置4に表示され、「300m先の交差点を右折です」といったような音声案内メッセージがスピーカ2から出力される(ステップ518)。なお、図6cでは、進路変更案内図60を表示する際に、案内画像40の表示サイズを縮小した上で、案内画像40と共に進路変更案内図60を表示するようにしている。
【0045】
次に、車両が最後から二番目の進路変更ポイントとなるノード633を通過して、次に通過する進路変更ポイントであるノード632が誘導地点のノード631に到る前の最後の進路変更ポイントとなると(ステップ506)、誘導地点のノード631に到達する前に最後に走行するリンク640が、二条全道路を形成する上り下り方向の二つの道路601、602のリンクを連結するリンクであって(ステップ512)、その直前に通過するリンクが当該最後に走行するリンク640が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路602のリンクであるので(ステップ514)、到達判定地点630が、図6aの誘導地点に設定されているノード631から、図6bに示すように誘導地点に設定されているノード631の前に通過するノード632に変更され、この到達判定地点630に二条線対応フラグが設定される(ステップ516)。
【0046】
そして、その後、車両の現在位置が図6bの652で示す、到達判定地点630まで所定距離以内の地点に達すると(ステップ510)、図6dに示すように、目的地案内画面61が表示装置4に表示されると共に(ステップ524)、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージがスピーカ2から出力される(ステップ526)。なお、ここでは、到達判定地点630に、二条線対応フラグが設定されているので、図3b4の目的地案内画面を表示する。
【0047】
なお、図6dでは、目的地案内画面61を表示する際に、案内画像40の表示サイズを縮小した上で、案内画像40と共に目的地案内画面61を表示するようにしている。
結果、このように誘導地点631前の最後の進路変更ポイントとなるノード632における進路変更を案内せずに、最後の進路変更ポイントの前で経路案内を終了するので、先に図11bに示したように、ノード632における進路変更を案内する進路変更案内図を表示して進入不可能道路610を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまうことが避けられる。
【0048】
なお、図6aと同様にノード631が誘導地点として設定されている場合であっても、誘導経路が図6eやfに示すように設定されている場合には、到達判定地点630は、誘導地点のノード631のままとなる。図6eの場合は、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するリンクでないためにステップ512の条件を満たさず、図6fの場合は最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の道路601、602のうちのいずれの道路のリンクでもないためにステップ514の条件を満たさないからである。
【0049】
そして、図6e、fの場合には、最後の進路変更ポイントにおける進路変更を案内しても、進入不可能道路610を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまうことはない。
【0050】
なお、図7aに示すように、地図データ上において、上り方向の道路601と、下り方向の道路602からなる二条線道路600が存在し、施設70内の地点が目的地620として設定されたために、施設に対して標準誘導地点として定義されているノード631が誘導地点として設定されている場合において、図示するように、道路602を走行後、道路602上のノード632と、道路601上の誘導地点に設定されているノード631とを連結するUターン専用の740を走行して、誘導地点のノード631に到る誘導経路650が設定されているときも、図6aに示した場合と同様であり、到達判定地点630は、図7aの誘導地点に設定されているノード631から、図7bに示すように誘導地点に設定されているノード631の前に通過するノード632に変更され、この到達判定地点630に二条線対応フラグが設定されることになる。
【0051】
そして、その後、車両の現在位置が図7bの752で示す、到達判定地点630まで所定距離以内の地点に達した時点で、図7cに示すように、目的地案内画面61が表示装置4に表示されると共に、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージがスピーカ2から出力されることになる。なお、ここでも、到達判定地点630に、二条線対応フラグが設定されているので、図3b4の目的地案内画面を表示する。
【0052】
したがって、やはり、誘導地点630前の最後の進路変更ポイントとなるノード632における進路変更を案内せずに、最後の進路変更ポイントの前で経路案内を終了するので、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまったり、Uターン専用の道路上で経路案内が終了することを避けることができることになる。
【0053】
ところで、以上では、二条線道路を形成するリンク間を連結するリンクの端点となるノードに、二条線道路を形成するリンクから当該連結するリンクへ進入する誘導経路の誘導地点が設定された場合の問題に、到着判定地点を誘導地点から変更することにより対応したが、これは誘導経路設定時に誘導地点自体を変更することにより対応するようにしてもよい。
【0054】
すなわち、この場合には、先に図3に示した誘導経路設定処理に代えて図8に示す誘導経路設定処理を、先に図5に示した経路案内処理に代えて図9に示す経路案内処理を行うようにすればよい。
以下、図8に示した誘導経路設定処理と、図9に示した経路案内処理について説明する。
まず、図8の誘導経路設定処理について説明する。
図示するように、この誘導経路設定処理では、まず、メモリ14に設定されている現在位置を、部分経路始点に設定する(ステップ802)。
そして、到達すべき順に各目的地(最終目的地及び中間目的地)に順次着目し(ステップ820、824)、着目した目的地について順次以下の処理を行う。
すなわち、まず、着目した目的地の誘導地点を算出する(ステップ804、806、808)。ここで、着目した目的地が施設または施設内の地点であって、当該施設の施設レコードに標準誘導地点が定義されている場合には(ステップ804)、定義されている標準誘導地点を、着目した目的地の誘導地点として算出し(ステップ806)、その他の場合は、着目した目的地に最寄りの車両進入可能道路上の地点を誘導地点として算出する(ステップ808)。
【0055】
次に、設定されている部分経路始点から誘導地点までの経路を、必要地理的範囲の地図データの基本地図データの道路ユニットを記憶装置11から読み出し、距離最小、時間最小などコストモデルに基づいて探索し探索経路とする(ステップ810)。
次に、探索経路上の探索経路の終点となる誘導地点に到達する前に最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであるかどうかを調べる(ステップ812)。
そして、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクでなければ(ステップ812)、ステップ818に進む。
一方、最後に走行するリンクが、二条全道路を形成する上り下り方向の二つの道路を連結するリンクであれば(ステップ812)、さらに、探索経路上の当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであるかどうかを調べ(ステップ814)、二条線道路を形成する上り下り方向の二つの道路のうちのいずれの道路のリンクでなければ、ステップ818に進む。
【0056】
一方、当該最後に走行するリンクの直前に通過するリンクが、当該最後に走行するリンクが連結する二条線道路を形成する上り下り方向の二つの道路のうちの一方の道路のリンクであれば(ステップ814)、探索経路に従って走行した場合に当該最後に走行するリンクの走行開始点となるノードに誘導地点を更新し、更新した誘導地点に二条線対応フラグをセットする(ステップ816)。そして、ステップ818に進む。
【0057】
但し、ステップ816は、着目した誘導地点に自動車が走行不可能なリンクが連結している場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。または、ステップ816は、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。または、ステップ816は、着目した誘導地点に自動車が走行不可能なリンクが連結しているか、前記最後に走行するリンクが、二条全道路を形成する上り下り方向の二つのリンクを連結するUターン専用のリンクである場合にのみ実施し、他の場合には、そのままステップ818に進むようにしてもよい。
【0058】
次に、このようにしてステップ818に進んだならば、探索経路の部分経路開始点から誘導地点までの間の区間を部分経路に設定する。
そして、着目している目的地が最終目的地でなければ、部分経路始点を、着目している目的地について算出した誘導地点に更新し(ステップ822)、現在着目している目的地についての処理を終了し、次に到達すべき目的地に着目した処理に進む。
そして、全て目的地について以上のようにして部分経路が探索されたならば、それまでに探索した部分経路を連結した経路を誘導経路として、メモリ14に設定すると共に、各部分経路の終点となっている誘導地点をメモリ14に設定する(ステップ826)。
次に、図9の経路案内処理について説明する。
図示するように、この経路案内処理では、メモリ14に設定されている各誘導地点に到達すべき順に順次着目し(ステップ902、920、924)、着目した各誘導地点について順次以下の処理を行う。
すなわち、まず、現在位置から着目した誘導地点までの区間を案内対象経路に設定する(ステップ904)。
そして、誘導経路上次に通過する進路変更ポイントへの所定距離(たとえば、300m)内への接近の発生(ステップ906)と、着目した誘導地点前の最後の進路変更ポイントの通過(ステップ908)とを監視する。
そして、現在位置の誘導経路上次に通過する進路変更ポイントへの所定距離内への接近が発生した場合には(ステップ906)、当該進路変更ポイントにおける進路変更の案内を上述のように行い、進路変更ポイントの通過を待って(ステップ912)、ステップ906、908の監視に戻る。
【0059】
一方、着目した誘導地点前の最後の進路変更ポイントの通過が発生したならば(ステップ908)、着目した誘導地点への所定距離(たとえば、300m)内への接近の発生を待って(ステップ914)、予め用意しておいた図3b1からb4に示すような目的地案内画面をGUI制御部18を介して表示装置4に所定期間表示する(ステップ916)。
【0060】
ここで、本経路案内処理では、図3b1、b2、b3の目的地案内画面は、着目した誘導地点に二条線対応フラグが設定されていない場合に用い、図3b4の目的地案内画面は、着目した誘導地点に二条線対応フラグが設定されている場合に用いる。また、図3b1の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、およそ正面のリンク上にあるときに用い、図3b2の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、左側のリンク上または走行中道路から左側に離れた位置にあるときに用い、図3b3の目的地案内画面は、着目する誘導地点に対応する目的地が、現在位置から現在進行方向に見て、右側のリンク上または走行中道路から右側に離れた位置にあるときに用いる。なお、着目する誘導地点に対応する目的地とは、図8に示した誘導経路設定処理において、着目する誘導地点が算出された目的地である。
【0061】
そして、次に、案内対象経路の案内の終了を、「目的地周辺です。経路案内を終了します」といったような音声案内メッセージをスピーカ2に出力させることによりユーザに通知する(ステップ918)。
そして、着目する誘導地点が、最後の誘導地点であれば(ステップ920)、着目する誘導地点についての処理を終了すると共に、経路案内処理を終了する。
一方、着目する誘導地点が、最後の誘導地点でなければ、着目する誘導地点への通過を待って(ステップ922)、着目する誘導地点についての処理を終了し、次の誘導地点に着目したステップ904からの処理に進む。
ここで、以下に、図8の誘導経路設定処理との処理例を示す。
いま、図10aに示すように、地図データ上において、上り方向の道路101と、下り方向の道路102からなる二条線道路100が存在し、道路101に連結する車両進入不可能道路110上にユーザによって目的地120が設定された場合を考える。この場合、車両進入不可能道路110に自動車は進入できないので、車両進入不可能道路110の車両進入可能な最寄り地点となる、道路101の車両進入不可能道路110との連結ノード131が誘導地点130に設定され(ステップ804、808)、この誘導地点に設定されたノード131までの経路が、まず探索される(ステップ810)。
【0062】
そして、この場合において、図示するように、道路102を走行後、道路102上のノード132と、道路101上の誘導地点に設定されているノード131とを連結するリンク140を走行して、誘導地点のノード131に到る経路が探索経路150として探索されたときを考える。
【0063】
この場合、探索経路上の探索経路の終点となるノード131に到達する前に最後に走行するリンク140が、二条全道路を形成する上り下り方向の二つの道路101、102のリンクを連結するリンクであり(ステップ812)、最後に走行するリンク140の直前に通過するリンクが、当該最後に走行するリンク140が連結する二条線道路を形成する上り下り方向の二つの道路の一方の道路102のリンクであるので(ステップ814)、図10bに示すように、最後に走行するリンク140の走行開始点となるノード132に誘導地点130が更新され、更新した誘導地点130に二条線対応フラグがセットされる(ステップ816)。
【0064】
そして、図10aに示す探索経路150の部分経路開始点から、図10bに示す更新後の誘導地点130のノード132までの間の区間が、誘導経路の目的地120に対応する誘導地点130に到る部分を構成する部分経路170に設定される(ステップ818)。
なお、図10aから図10bに示すように、誘導地点130がノード131からノード132に変更されると、当該誘導地点130が算出された目的地120が中間目的地(経由地)である場合には、図10bに示すように、当該誘導地点130に設定されたノード132が、次の目的地までの部分経路182の始点として設定され当該次の目的地までの部分経路182が設定されることになる。一方、誘導地点130がノード131からノード132に変更されなかった場合には、図11aに示すように、誘導地点130に設定されたノード131が、次の目的地までの部分経路181の始点として設定され当該次の目的地までの部分経路181が設定されることになる。
【0065】
すなわち、次の目的地までの部分経路も、誘導地点の変更によって変化することになる。
さて、ここで、図10cに示すように、地図データ上において、上り方向の道路101と、下り方向の道路102からなる二条線道路100が存在し、施設80内の地点が目的地120として設定されたために、施設に対して標準誘導地点として定義されているノード131が誘導地点として設定されている場合において、図示するように、道路102を走行後、道路102上のノード132と、道路101上の誘導地点に設定されているノード131とを連結するUターン専用の190を走行して、誘導地点のノード131に到る経路150が、探索経路として探索されたときも、図10aに示した場合と同様であり、誘導地点130は、図10cの誘導地点に設定されているノード131から、図10dに示すようにノード131の前に通過するノード132に変更され、この到達判定地点130に二条線対応フラグが設定される。
【0066】
そして、図10cに示す探索経路150の部分経路開始点から、図10dに示す更新後の誘導地点130のノード132までの間の区間が、目的地120に対応する誘導地点130に到る部分を構成する部分経路170に設定される。また、図10cから図10dに示すように、誘導地点130がノード131からノード132に変更されると、当該誘導地点130が算出された目的地120が中間目的地(経由地)である場合には、次の目的地までの部分経路は、図10dに部分経路182と示すようになり、この部分経路182は、図10cに示す誘導地点130がノード131からノード132に変更されなかった場合の部分経路181とは異なるものとなる。
【0067】
したがって、このような図8に示す誘導経路設定処理によれば、図9の経路案内処理において、誘導地点をそのまま到達判定地点として進路変更案内や目的地案内を行えば、図3に示した誘導経路設定処理や図5に示した経路案内処理と同様の進路変更案内や目的地案内が行われることになり、進入不可能道路を走行できるものとユーザに誤解を与えてしまったり、経路案内の終了を通知する音声メッセージが誘導地点到着までに間に合わなくなってしまったり、Uターン専用の道路上で経路案内が終了することを避けることができる。
【0068】
以上、本発明の実施形態について説明した。
なお、以上の実施形態では、異なる路線を形成する上り方向に一方通行の道路と下り方向に一方通行の道路との二つの道路が並行に敷設されている場合、この二つの道路も二条線道路と見なして以上の誘導経路設定処理や経路案内処理を適用するようにしてもよい。
【図面の簡単な説明】
【0069】
【図1】本発明の実施形態に係るナビゲーションシステムの構成を示すブロック図である。
【図2】本発明の実施形態に係るナビゲーション装置が備える地図データを示す図である。
【図3】本発明の実施形態に係る誘導経路設定処理を示すフローチャートである。
【図4】本発明の実施形態に係るナビゲーションシステムの表示例を示す図である。
【図5】本発明の実施形態に係る経路案内処理を示すフローチャートである。
【図6】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図7】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図8】本発明の実施形態に係る誘導経路設定処理の他の構成例を示すフローチャートである。
【図9】本発明の実施形態に係る経路案内処理の他の構成例を示すフローチャートである。
【図10】本発明の実施形態に係る経路案内処理の処理例を示す図である。
【図11】従来の経路案内の処理例を示す図である。
【符号の説明】
【0070】
1…ナビゲーション装置、2…スピーカ、3…操作部、4…表示装置、5…車両状態センサ、6…GPS受信機、11…記憶装置、12…現在状態算出部、13…ルート探索部、14…メモリ、15…音声生成部、16…制御部、17…案内画像生成部、18…GUI制御部、40…案内画像。
【特許請求の範囲】
【請求項1】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記到着判定部は、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
前記到着判定部は、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項3】
請求項1記載のナビゲーション装置であって、
前記到着判定部は、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項4】
請求項1、2または3記載のナビゲーション装置であって、
前記到着判定部が、前記経路誘導部の前記経路案内を終了させるときに、前記目的地の位置を案内する目的地案内部を有することを特徴とするナビゲーション装置。
【請求項5】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記誘導経路設定部は、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定することを特徴とするナビゲーション装置。
【請求項6】
請求項5記載のナビゲーション装置であって、
前記誘導経路設定部は、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更することを特徴とするナビゲーション装置。
【請求項7】
請求項5記載のナビゲーション装置であって、
前記誘導経路設定部は、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更することを特徴とするナビゲーション装置。
【請求項8】
自動車に搭載されるナビゲーション装置であって、
設定された誘導経路の終点である経路終了地点への到着を判定する到着判定方法であって、
前記自動車の現在位置を算出する現在位置算出ステップと、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、経路終了地点へ到着したと判定する判定ステップとを有し、
前記判定ステップは、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置における到着判定方法。
【請求項9】
自動車に搭載されるナビゲーション装置において、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定方法であって、
設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索するステップと、
前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであるか否かを判定し、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定するステップとを有することを特徴とするナビゲーション装置における誘導経路設定方法。
【請求項10】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記到着判定部は、
前記誘導経路の経路終了地点が、前記地図データが表す道路網上で、走行方向が反対向きの隣接した二つの道路として表現されている二つの道路のうちの一方の道路上の、当該二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二つの道路のうちの他方の道路から、前記連結道路に進行して、当該二つの道路のうちの前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二つの道路のうちの前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項11】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記誘導経路設定部は、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上で走行方向が反対向きの隣接した二つの道路として表現されている二つの道路のうちの一方の道路上の、当該二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二つの道路のうちの他方の道路から、前記連結道路に進行して、当該二つの道路のうちの前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二つの道路のうちの前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定することを特徴とするナビゲーション装置。
【請求項1】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記到着判定部は、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
前記到着判定部は、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項3】
請求項1記載のナビゲーション装置であって、
前記到着判定部は、前記誘導経路の経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項4】
請求項1、2または3記載のナビゲーション装置であって、
前記到着判定部が、前記経路誘導部の前記経路案内を終了させるときに、前記目的地の位置を案内する目的地案内部を有することを特徴とするナビゲーション装置。
【請求項5】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記誘導経路設定部は、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定することを特徴とするナビゲーション装置。
【請求項6】
請求項5記載のナビゲーション装置であって、
前記誘導経路設定部は、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記連結道路が二条線道路を形成する二つの道路間のUターン専用の道路である場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更することを特徴とするナビゲーション装置。
【請求項7】
請求項5記載のナビゲーション装置であって、
前記誘導経路設定部は、前記経路終了地点が、前記二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであり、かつ、前記二条線道路を形成する前記一方の道路上の、前記連結道路との連結地点に、自動車が走行不可能な道路が連結している場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更することを特徴とするナビゲーション装置。
【請求項8】
自動車に搭載されるナビゲーション装置であって、
設定された誘導経路の終点である経路終了地点への到着を判定する到着判定方法であって、
前記自動車の現在位置を算出する現在位置算出ステップと、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、経路終了地点へ到着したと判定する判定ステップとを有し、
前記判定ステップは、前記誘導経路の経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置における到着判定方法。
【請求項9】
自動車に搭載されるナビゲーション装置において、道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定方法であって、
設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索するステップと、
前記経路終了地点が、前記地図データが表す道路網上において走行方向が反対向きの二つの道路として分離して表現されている、一つの路線に対応する道路であるところの二条線道路を形成する二つの道路のうちの一方の道路上の、当該二条線道路を形成する二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二条線道路を形成する他方の道路から、前記連結道路に進行して、当該二条線道路を形成する前記一方の道路上の前記経路終了地点に到るものであるか否かを判定し、当該二条線道路を形成する前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定するステップとを有することを特徴とするナビゲーション装置における誘導経路設定方法。
【請求項10】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において到着判定地点より手前にある最後の進路変更地点を通過しており、かつ、前記到着判定地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記到着判定部は、
前記誘導経路の経路終了地点が、前記地図データが表す道路網上で、走行方向が反対向きの隣接した二つの道路として表現されている二つの道路のうちの一方の道路上の、当該二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記誘導経路が、当該二つの道路のうちの他方の道路から、前記連結道路に進行して、当該二つの道路のうちの前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二つの道路のうちの前記他方の道路と前記連結道路との連結地点を前記到着判定地点とし、他の場合には、前記誘導経路の経路終了地点を前記到着判定地点とすることを特徴とするナビゲーション装置。
【請求項11】
自動車に搭載されるナビゲーション装置であって、
道路網を表す地図データに基づいて、設定された目的地に応じて設定した経路終了地点までの経路を誘導経路として設定する誘導経路設定部と、
前記自動車の現在位置を算出する現在位置算出部と、
前記誘導経路に従って、進路変更地点における進路変更案内を含む経路案内を行う経路誘導部と、
前記現在位置算出部が算出した現在位置に基づいて、前記自動車が、前記誘導経路上において前記経路終了地点より手前にある最後の進路変更地点を通過しており、かつ、前記経路終了地点に所定距離内に接近した位置にあることが検出されたときに、前記経路誘導部の前記経路案内を終了させる到着判定部とを有し、
前記誘導経路設定部は、設定された目的地最寄りの車両走行可能な道路上の地点もしくは設定された目的地に対して予め定義された車両走行可能な道路上の地点を経路終了地点に設定し、経路終了地点までの経路を前記地図データに基づいて探索経路として探索し、前記経路終了地点が、前記地図データが表す道路網上で走行方向が反対向きの隣接した二つの道路として表現されている二つの道路のうちの一方の道路上の、当該二つの道路を連結する道路である連結道路との連結地点にあり、かつ、前記探索経路が、当該二つの道路のうちの他方の道路から、前記連結道路に進行して、当該二つの道路のうちの前記一方の道路上の前記経路終了地点に到るものであった場合に、当該二つの道路のうちの前記他方の道路と前記連結道路との連結地点に前記経路終了地点を変更し、変更後の経路終了地点までの経路を前記誘導経路として設定し、他の場合には、前記探索経路を前記誘導経路として設定することを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−8259(P2010−8259A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−168665(P2008−168665)
【出願日】平成20年6月27日(2008.6.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月27日(2008.6.27)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]