
ナビゲーション装置
【課題】交差点を曲がるための準備する段階を認識できるナビゲーション装置を提供する。
【解決手段】広域地図が表示されている場合、車両が誘導交差点手前300mに到達したとき、自車位置マーク21の表示色を黄色にする。車両が誘導交差点手前100mに到達したとき、自車位置マーク21の表示色を緑色にする。車両が誘導交差点を通過したとき、自車位置マーク21の表示色を赤色にする。
【解決手段】広域地図が表示されている場合、車両が誘導交差点手前300mに到達したとき、自車位置マーク21の表示色を黄色にする。車両が誘導交差点手前100mに到達したとき、自車位置マーク21の表示色を緑色にする。車両が誘導交差点を通過したとき、自車位置マーク21の表示色を赤色にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
従来、次に通過する交差点までの距離を数値で表示するナビゲーション装置が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−14797号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のナビゲーション装置では、とくに広域地図表示中では、車両が推奨経路にしたがって走行した際に次に右左折などを行う交差点(以降、誘導交差点と記載)において、誘導交差点までの距離表示のみでは、誘導交差点を曲がる準備をするタイミングをユーザが把握しにくいという問題点がある。
【課題を解決するための手段】
【0005】
請求項1の発明のナビゲーション装置は、表示モニタと、経路を探索する探索手段と、地図を表示モニタに表示させる地図表示制御手段と、車両の現在地を検出する現在地検出手段と、現在地検出手段によって検出された現在地を示すマークを地図上に表示させる現在地表示制御手段と、探索手段によって探索された経路と、現在地検出手段によって検出された現在地とに基づいて、車両が次に通過する誘導交差点を検出する誘導交差点検出手段と、現在地検出手段により検出された現在地と、誘導交差点検出手段により検出された誘導交差点との間の距離を算出する距離算出手段と、地図表示制御手段によって表示された地図の縮尺から、地図表示制御手段によって表示された地図は広域地図であるか否かを判定する広域地図判定手段とを備え、現在地表示制御手段は、広域地図判定手段によって広域地図であると判定された場合、距離算出手段によって算出された距離が予め定めた所定値以下になると、マークの表示態様を変更することを特徴とする。
【発明の効果】
【0006】
本発明によれば、ユーザが、交差点を曲がる準備をするタイミングを容易に認識することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施形態におけるナビゲーション装置の構成を示すブロック図である。
【図2】本発明の第1の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図3】本発明の第1の実施形態における自車位置マークの表示態様の変化を説明するための図である。
【図4】本発明の第2の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図5】本発明の第3の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図6】本発明の第4の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図7】本発明の第4の実施形態における自車位置マークの表示態様の変化を説明するための図である。
【発明を実施するための形態】
【0008】
−第1の実施形態−
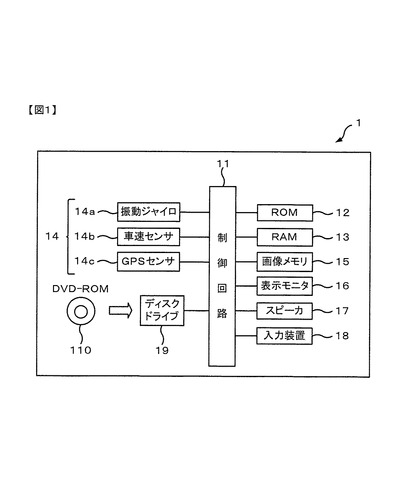
図1は、本発明の第1の実施形態によるナビゲーション装置1を示す。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18およびディスクドライブ19を有している。ディスクドライブ19には、地図データが記憶されたDVD−ROM110が装填されている。
【0009】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。制御回路11は、DVD−ROM110に記憶された地図データに基づいて所定の経路探索処理を行う。そして、その処理結果を推奨経路として表示モニタ16に表示する。
【0010】
現在地検出装置14は車両の現在地を検出する装置である。現在地検出装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲などを決定する。また、現在地検出装置14により検出された車両の現在地が自車位置マークとして地図上に表示される。
【0011】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはDVD−ROM110に記憶された地図データに基づいて、制御回路11において適宜生成される。
【0012】
ディスクドライブ19は、DVD−ROM110から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM110以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0013】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の地図などの各種情報を画面表示としてユーザに提供する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドの設定などのために操作される操作キーを有し、操作パネル上のボタンスイッチやパネル周囲のハードスイッチなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0014】
目的地がユーザによって設定されると、目的地に経路探索の終了点が設定される。そして、車両の現在地が経路探索の開始点に設定され、経路探索用データを用いて開始点から終了点までの経路演算を所定のアルゴリズムに基づいて行う。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。
【0015】
また、ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。この経路誘導では、車両が誘導交差点(車両が推奨経路にしたがって走行する場合、右左折など曲がる交差点)に接近すると、表示モニタ16に表示されている自車位置マークの表示色が変更される。車両が次に通過する誘導交差点は、現在地検出装置14によって検出された現在地と、推奨経路とに基づいて検出される。
【0016】
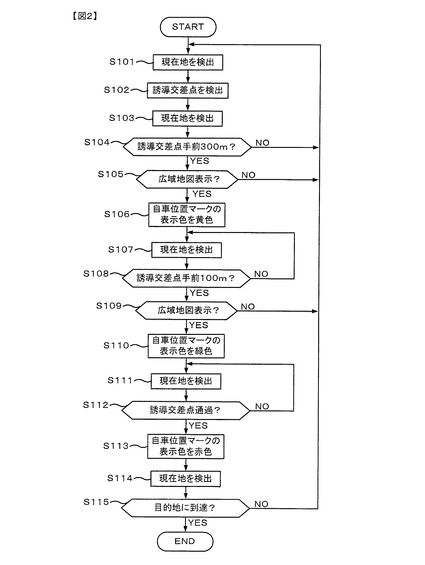
次に、図2のフローチャートを参照して、本発明の第1実施形態における誘導交差点接近報知処理を説明する。図2の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されており、通常、自車位置マークは赤色で表示されているものとして説明する。
【0017】
ステップS101では、現在地検出装置14を使用して車両の現在地を検出する。ステップS102では、車両の現在地と推奨経路とに基づいて車両が次に通過する誘導交差点を検出する。
【0018】
ステップS103では、車両の現在地を検出する。ステップS104では、車両の現在地と誘導交差点との間の距離を算出して、車両は誘導交差点手前300mに到達したか否かを判定する。車両が誘導交差点手前300mに到達した場合はステップS104が肯定判定され、ステップS105へ進む。車両が誘導交差点手前300mに到達していない場合はステップS104が否定判定され、ステップS101に戻る。
【0019】
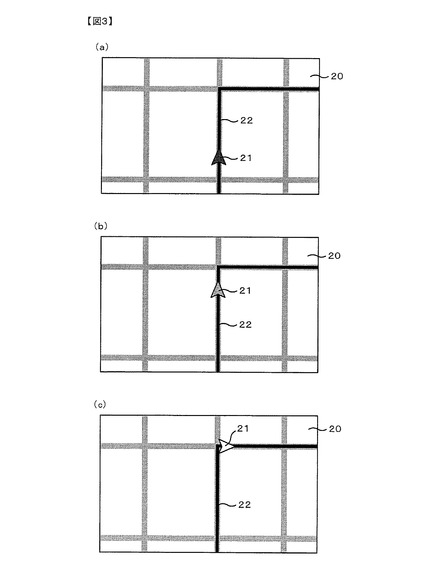
ステップS105では、表示モニタ16に表示されている地図の縮尺を検出して、表示モニタ16に表示されている地図の縮尺は所定の縮尺より広域側の縮尺であるか否か、つまり表示されている地図は広域地図であるか否かを判定する。この明細書では、予め定めた縮尺を基準として、地図を広域地図と詳細地図とに分類するものとする。表示されている地図が広域地図である場合はステップS105が肯定判定され、ステップS106へ進む。表示されている地図が広域地図でない場合はステップS105が否定判定され、ステップS101に戻る。ステップS106では、自車位置マークの表示色を黄色にする。図3(a)に、自車位置マークの表示例を示す。図3(a)は、車両が誘導交差点手前300mに到達したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(a)に示すように、自車位置マーク21の表示色は黄色になる。
【0020】
ステップS107では、車両の現在地を検出する。ステップS108では、車両は誘導交差点手前100mに到達したか否かを判定する。車両が誘導交差点手前100mに到達した場合はステップS108が肯定判定され、ステップS109へ進む。車両が誘導交差点手前100mに到達していない場合はステップS108が否定判定され、ステップS107に戻る。
【0021】
ステップS109では、表示モニタ16に表示されている地図は広域地図であるか否かを判定する。表示されている地図が広域地図である場合はステップS109が肯定判定され、ステップS110へ進む。表示されている地図が広域地図でない場合はステップS109が否定判定され、ステップS101に戻る。ステップS110では、自車位置マークの表示色を緑色にする。図3(b)に、自車位置マークの表示例を示す。図3(b)は、車両が誘導交差点手前100mに到達したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(b)に示すように、自車位置マーク21の表示色は緑色になる。
【0022】
ステップS111では、車両の現在地を検出する。ステップS112では、車両は誘導交差点を通過したか否かを判定する。車両が誘導交差点を通過した場合はステップS112が肯定判定され、ステップS113へ進む。車両が誘導交差点を通過していない場合はステップS112が否定判定され、ステップS111に戻る。ステップS113では、自車位置マークの表示色を赤色にする。図3(c)に、自車位置マークの表示例を示す。図3(c)は、車両が誘導交差点を通過したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(c)に示すように、自車位置マーク21の表示色は赤色になる。
【0023】
ステップS114では、車両の現在地を検出する。ステップS115では、車両は目的地に到達したか否かを判定する。車両が目的地に到達した場合はステップS115が肯定判定され、誘導交差点接近報知処理を終了する。車両が目的地に到達していない場合はステップS115が否定判定され、ステップS101に戻る。
【0024】
以上の第1の実施形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示態様を変更するようにした。たとえば、表示色を変更した。これにより、ユーザは、現在地と誘導交差点との間の距離を数値で表示するよりも容易に認識できるようになり、広域地図表示のように右左折の目印が少ない場合でも交差点を曲がるための操作を準備する段階を認識できる。
【0025】
(2)とくに、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示色を段階的に変更するようにした。これにより、ユーザは、交差点への接近の程度も確実に認識できる。
【0026】
以上の第1の実施形態のナビゲーション装置1を次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示色を連続的に変更するようにしてもよい。これにより、車両が誘導交差点に徐々に近づいていることをユーザは実感することができる。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの表示色が黄色から緑色に徐々に変化するようにしてもよい。
【0027】
(2)自車位置マークの表示色の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの表示色が赤色から黄色に変更され、車両が誘導交差点を通過すると自車位置マークの表示色が黄色から赤色に変更されるようにしてもよい。
【0028】
(3)自車位置マークの表示色を変更するものであれば、変更する表示色は実施形態に限定されない。
【0029】
(4)自車位置マークの表示色を変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0030】
−第2の実施形態−
本発明の第2の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくにしたがって、自車位置マークの大きさを変更する。本発明の第2の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第2の実施形態のナビゲーション装置の構成の説明は省略する。
【0031】
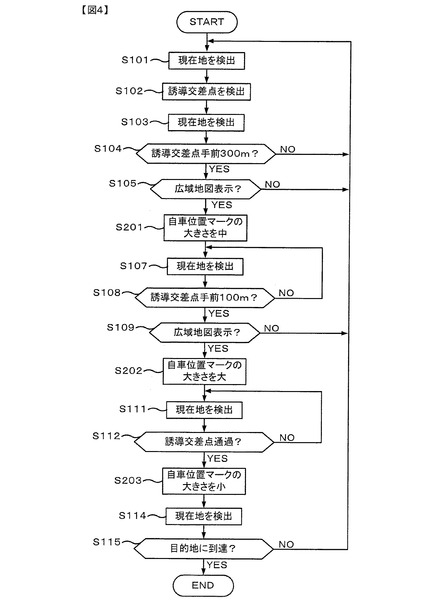
図4のフローチャートを参照して、本発明の第2の実施形態における誘導交差点接近報知処理を説明する。図4の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されており、通常表示される自車位置マークの大きさは小であるものとして説明する。自車位置マークの大きさは、大、小、中の3つの大きさに変更できるものとする。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0032】
ステップS105が肯定判定されるとステップS201へ進む。ステップS201では、自車位置マークの大きさを中にする。そして、ステップS107へ進む。
【0033】
ステップS109が肯定判定されるとステップS202へ進む。ステップS202では、自車位置マークの大きさを大にする。そして、ステップS111へ進む。
【0034】
ステップS112が肯定判定されるとステップS203へ進む。ステップS203では、自車位置マークの大きさを小にする。そして、ステップS114へ進む。
【0035】
以上の第2の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0036】
以上の第2の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの大きさを連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの大きさが中から大に徐々に大きくなるようにしてもよい。
【0037】
(2)自車位置マークの大きさの変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの大きさが小から大に変更され、車両が誘導交差点を通過すると自車位置マークの大きさが大から小に変更されるようにしてもよい。
【0038】
(3)自車位置マークの大きさを変更するものであれば、変更する大きさは実施形態に限定されない。
【0039】
(4)自車位置マークの大きさを変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0040】
−第3の実施形態−
本発明の第3の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくと、自車位置マークを点滅させ、車両が誘導交差点にさらに近づくと点滅の間隔が短くなる。本発明の第3の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第3の実施形態のナビゲーション装置の構成の説明は省略する。
【0041】
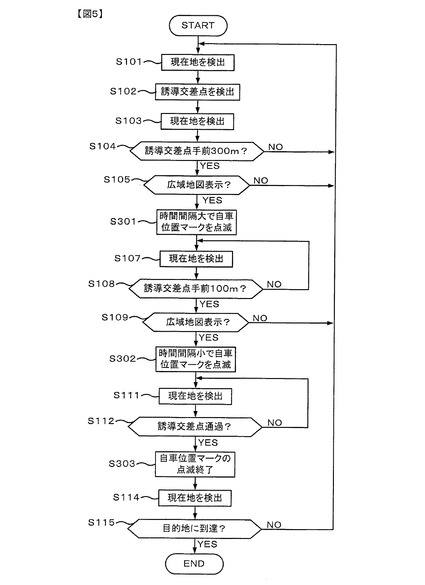
図5のフローチャートを参照して、本発明の第3の実施形態における誘導交差点接近報知処理を説明する。図5の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されているものとして説明する。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0042】
ステップS105が肯定判定されるとステップS301へ進む。ステップS301では、点滅の時間間隔大で自車位置マークを点滅させる。ここで、自車位置マークを点滅させるときの時間間隔には長い時間の大と短い時間の小とがあるものとする。そして、ステップS107へ進む。
【0043】
ステップS109が肯定判定されるとステップS302へ進む。ステップS302では、時間間隔小で自車位置マークを点滅させる。そして、ステップS111へ進む。
【0044】
ステップS112が肯定判定されるとステップS303へ進む。ステップS303では、自車位置マークの点滅を終了する。そして、ステップS114へ進む。
【0045】
以上の第3の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0046】
以上の第3の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの点滅の時間間隔を連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの点滅の時間間隔が大から小に徐々に小さくなるようにしてもよい。
【0047】
(2)自車位置マークの点滅の時間間隔の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークが所定の時間間隔で点滅を開始し、車両が誘導交差点を通過すると自車位置マークの点滅が終了するようにしてもよい。
【0048】
(3)自車位置マークの点滅の時間間隔を変更するものであれば、変更する時間間隔は実施形態に限定されない。
【0049】
(4)自車位置マークの点滅を開始するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0050】
−第4の実施形態−
本発明の第4の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくにしたがって、自車位置マークの形状を変更する。本発明の第4の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第4の実施形態のナビゲーション装置の構成の説明は省略する。
【0051】
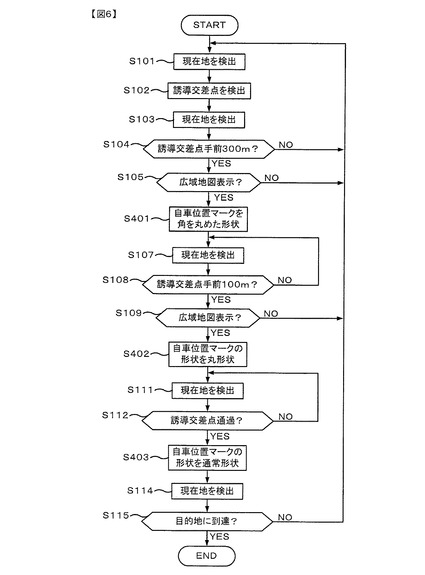
図6のフローチャートを参照して、本発明の第4の実施形態における誘導交差点接近報知処理を説明する。図6の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と、通常形状の自車位置マークとが表されている地図が表示されているものとして説明する。自車位置マークの形状は、通常形状、通常形状の角を丸めた形状および丸形状の3つの形状に変更できるものとする。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0052】
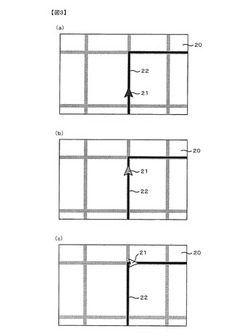
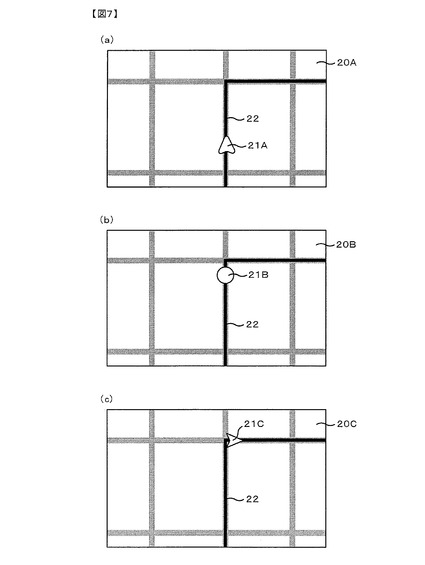
ステップS105が肯定判定されるとステップS401へ進む。ステップS401では、自車位置マークの形状を通常形状の角を丸めた形状にする。図7(a)に、自車位置マークの表示例を示す。図7(a)は、車両が誘導交差点手前300mに到達したときの自車位置マーク21Aと推奨経路22とを表示した地図20Aを示す図である。図7(a)に示すように、自車位置マーク21Aは通常形状の角を丸めた形状になる。そして、ステップS107へ進む。
【0053】
ステップS109が肯定判定されるとステップS402へ進む。ステップS402では、自車位置マークの形状を丸形状にする。図7(b)に、自車位置マークの表示例を示す。図7(b)は、車両が誘導交差点手前100mに到達したときの自車位置マーク21Bと推奨経路22とを表示した地図20Bを示す図である。図7(b)に示すように、自車位置マーク21Bは丸形状になる。そして、ステップS111へ進む。
【0054】
ステップS112が肯定判定されるとステップS403へ進む。ステップS403では、自車位置マークの形状を通常形状にする。図7(c)に、自車位置マークの表示例を示す。図7(c)は、車両が誘導交差点を通過したときの自車位置マーク21Cと推奨経路22とを表示した地図20Cを示す図である。図7(c)に示すように、自車位置マーク21Cは通常形状になる。そして、ステップS114へ進む。
【0055】
以上の第4の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0056】
以上の第4の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの形状を連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの形状が通常形状の角を丸めた形状から丸形状に徐々に変形するようにしてもよい。
【0057】
(2)自車位置マークの形状の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの大きさが通常形状から丸形状に変更され、車両が誘導交差点を通過すると自車位置マークの形状が丸形状から通常形状に変更されるようにしてもよい。
【0058】
(3)自車位置マークの形状を変更するものであれば、変更する形状は実施形態に限定されない。
【0059】
(4)自車位置マークの形状を変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0060】
現在地を示すマークの表示態様を変更するものであれば、変更するマークの表示態様は表示色、大きさ、表示の点滅および形状に限定されない。
【0061】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0062】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0063】
1 ナビゲーション装置
11 制御回路
16 表示モニタ
20,20A,20B,20C 地図
21,21A,21B,21C 自車位置マーク
22 推奨経路
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
従来、次に通過する交差点までの距離を数値で表示するナビゲーション装置が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−14797号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のナビゲーション装置では、とくに広域地図表示中では、車両が推奨経路にしたがって走行した際に次に右左折などを行う交差点(以降、誘導交差点と記載)において、誘導交差点までの距離表示のみでは、誘導交差点を曲がる準備をするタイミングをユーザが把握しにくいという問題点がある。
【課題を解決するための手段】
【0005】
請求項1の発明のナビゲーション装置は、表示モニタと、経路を探索する探索手段と、地図を表示モニタに表示させる地図表示制御手段と、車両の現在地を検出する現在地検出手段と、現在地検出手段によって検出された現在地を示すマークを地図上に表示させる現在地表示制御手段と、探索手段によって探索された経路と、現在地検出手段によって検出された現在地とに基づいて、車両が次に通過する誘導交差点を検出する誘導交差点検出手段と、現在地検出手段により検出された現在地と、誘導交差点検出手段により検出された誘導交差点との間の距離を算出する距離算出手段と、地図表示制御手段によって表示された地図の縮尺から、地図表示制御手段によって表示された地図は広域地図であるか否かを判定する広域地図判定手段とを備え、現在地表示制御手段は、広域地図判定手段によって広域地図であると判定された場合、距離算出手段によって算出された距離が予め定めた所定値以下になると、マークの表示態様を変更することを特徴とする。
【発明の効果】
【0006】
本発明によれば、ユーザが、交差点を曲がる準備をするタイミングを容易に認識することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施形態におけるナビゲーション装置の構成を示すブロック図である。
【図2】本発明の第1の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図3】本発明の第1の実施形態における自車位置マークの表示態様の変化を説明するための図である。
【図4】本発明の第2の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図5】本発明の第3の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図6】本発明の第4の実施形態における誘導交差点接近報知処理を説明するためのフローチャートである。
【図7】本発明の第4の実施形態における自車位置マークの表示態様の変化を説明するための図である。
【発明を実施するための形態】
【0008】
−第1の実施形態−
図1は、本発明の第1の実施形態によるナビゲーション装置1を示す。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18およびディスクドライブ19を有している。ディスクドライブ19には、地図データが記憶されたDVD−ROM110が装填されている。
【0009】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。制御回路11は、DVD−ROM110に記憶された地図データに基づいて所定の経路探索処理を行う。そして、その処理結果を推奨経路として表示モニタ16に表示する。
【0010】
現在地検出装置14は車両の現在地を検出する装置である。現在地検出装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲などを決定する。また、現在地検出装置14により検出された車両の現在地が自車位置マークとして地図上に表示される。
【0011】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはDVD−ROM110に記憶された地図データに基づいて、制御回路11において適宜生成される。
【0012】
ディスクドライブ19は、DVD−ROM110から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM110以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0013】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の地図などの各種情報を画面表示としてユーザに提供する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドの設定などのために操作される操作キーを有し、操作パネル上のボタンスイッチやパネル周囲のハードスイッチなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0014】
目的地がユーザによって設定されると、目的地に経路探索の終了点が設定される。そして、車両の現在地が経路探索の開始点に設定され、経路探索用データを用いて開始点から終了点までの経路演算を所定のアルゴリズムに基づいて行う。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。
【0015】
また、ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。この経路誘導では、車両が誘導交差点(車両が推奨経路にしたがって走行する場合、右左折など曲がる交差点)に接近すると、表示モニタ16に表示されている自車位置マークの表示色が変更される。車両が次に通過する誘導交差点は、現在地検出装置14によって検出された現在地と、推奨経路とに基づいて検出される。
【0016】
次に、図2のフローチャートを参照して、本発明の第1実施形態における誘導交差点接近報知処理を説明する。図2の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されており、通常、自車位置マークは赤色で表示されているものとして説明する。
【0017】
ステップS101では、現在地検出装置14を使用して車両の現在地を検出する。ステップS102では、車両の現在地と推奨経路とに基づいて車両が次に通過する誘導交差点を検出する。
【0018】
ステップS103では、車両の現在地を検出する。ステップS104では、車両の現在地と誘導交差点との間の距離を算出して、車両は誘導交差点手前300mに到達したか否かを判定する。車両が誘導交差点手前300mに到達した場合はステップS104が肯定判定され、ステップS105へ進む。車両が誘導交差点手前300mに到達していない場合はステップS104が否定判定され、ステップS101に戻る。
【0019】
ステップS105では、表示モニタ16に表示されている地図の縮尺を検出して、表示モニタ16に表示されている地図の縮尺は所定の縮尺より広域側の縮尺であるか否か、つまり表示されている地図は広域地図であるか否かを判定する。この明細書では、予め定めた縮尺を基準として、地図を広域地図と詳細地図とに分類するものとする。表示されている地図が広域地図である場合はステップS105が肯定判定され、ステップS106へ進む。表示されている地図が広域地図でない場合はステップS105が否定判定され、ステップS101に戻る。ステップS106では、自車位置マークの表示色を黄色にする。図3(a)に、自車位置マークの表示例を示す。図3(a)は、車両が誘導交差点手前300mに到達したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(a)に示すように、自車位置マーク21の表示色は黄色になる。
【0020】
ステップS107では、車両の現在地を検出する。ステップS108では、車両は誘導交差点手前100mに到達したか否かを判定する。車両が誘導交差点手前100mに到達した場合はステップS108が肯定判定され、ステップS109へ進む。車両が誘導交差点手前100mに到達していない場合はステップS108が否定判定され、ステップS107に戻る。
【0021】
ステップS109では、表示モニタ16に表示されている地図は広域地図であるか否かを判定する。表示されている地図が広域地図である場合はステップS109が肯定判定され、ステップS110へ進む。表示されている地図が広域地図でない場合はステップS109が否定判定され、ステップS101に戻る。ステップS110では、自車位置マークの表示色を緑色にする。図3(b)に、自車位置マークの表示例を示す。図3(b)は、車両が誘導交差点手前100mに到達したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(b)に示すように、自車位置マーク21の表示色は緑色になる。
【0022】
ステップS111では、車両の現在地を検出する。ステップS112では、車両は誘導交差点を通過したか否かを判定する。車両が誘導交差点を通過した場合はステップS112が肯定判定され、ステップS113へ進む。車両が誘導交差点を通過していない場合はステップS112が否定判定され、ステップS111に戻る。ステップS113では、自車位置マークの表示色を赤色にする。図3(c)に、自車位置マークの表示例を示す。図3(c)は、車両が誘導交差点を通過したときの自車位置マーク21と推奨経路22とを表示した地図20を示す図である。図3(c)に示すように、自車位置マーク21の表示色は赤色になる。
【0023】
ステップS114では、車両の現在地を検出する。ステップS115では、車両は目的地に到達したか否かを判定する。車両が目的地に到達した場合はステップS115が肯定判定され、誘導交差点接近報知処理を終了する。車両が目的地に到達していない場合はステップS115が否定判定され、ステップS101に戻る。
【0024】
以上の第1の実施形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示態様を変更するようにした。たとえば、表示色を変更した。これにより、ユーザは、現在地と誘導交差点との間の距離を数値で表示するよりも容易に認識できるようになり、広域地図表示のように右左折の目印が少ない場合でも交差点を曲がるための操作を準備する段階を認識できる。
【0025】
(2)とくに、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示色を段階的に変更するようにした。これにより、ユーザは、交差点への接近の程度も確実に認識できる。
【0026】
以上の第1の実施形態のナビゲーション装置1を次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの表示色を連続的に変更するようにしてもよい。これにより、車両が誘導交差点に徐々に近づいていることをユーザは実感することができる。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの表示色が黄色から緑色に徐々に変化するようにしてもよい。
【0027】
(2)自車位置マークの表示色の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの表示色が赤色から黄色に変更され、車両が誘導交差点を通過すると自車位置マークの表示色が黄色から赤色に変更されるようにしてもよい。
【0028】
(3)自車位置マークの表示色を変更するものであれば、変更する表示色は実施形態に限定されない。
【0029】
(4)自車位置マークの表示色を変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0030】
−第2の実施形態−
本発明の第2の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくにしたがって、自車位置マークの大きさを変更する。本発明の第2の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第2の実施形態のナビゲーション装置の構成の説明は省略する。
【0031】
図4のフローチャートを参照して、本発明の第2の実施形態における誘導交差点接近報知処理を説明する。図4の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されており、通常表示される自車位置マークの大きさは小であるものとして説明する。自車位置マークの大きさは、大、小、中の3つの大きさに変更できるものとする。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0032】
ステップS105が肯定判定されるとステップS201へ進む。ステップS201では、自車位置マークの大きさを中にする。そして、ステップS107へ進む。
【0033】
ステップS109が肯定判定されるとステップS202へ進む。ステップS202では、自車位置マークの大きさを大にする。そして、ステップS111へ進む。
【0034】
ステップS112が肯定判定されるとステップS203へ進む。ステップS203では、自車位置マークの大きさを小にする。そして、ステップS114へ進む。
【0035】
以上の第2の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0036】
以上の第2の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの大きさを連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの大きさが中から大に徐々に大きくなるようにしてもよい。
【0037】
(2)自車位置マークの大きさの変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの大きさが小から大に変更され、車両が誘導交差点を通過すると自車位置マークの大きさが大から小に変更されるようにしてもよい。
【0038】
(3)自車位置マークの大きさを変更するものであれば、変更する大きさは実施形態に限定されない。
【0039】
(4)自車位置マークの大きさを変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0040】
−第3の実施形態−
本発明の第3の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくと、自車位置マークを点滅させ、車両が誘導交差点にさらに近づくと点滅の間隔が短くなる。本発明の第3の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第3の実施形態のナビゲーション装置の構成の説明は省略する。
【0041】
図5のフローチャートを参照して、本発明の第3の実施形態における誘導交差点接近報知処理を説明する。図5の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と自車位置マークとが表されている地図が表示されているものとして説明する。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0042】
ステップS105が肯定判定されるとステップS301へ進む。ステップS301では、点滅の時間間隔大で自車位置マークを点滅させる。ここで、自車位置マークを点滅させるときの時間間隔には長い時間の大と短い時間の小とがあるものとする。そして、ステップS107へ進む。
【0043】
ステップS109が肯定判定されるとステップS302へ進む。ステップS302では、時間間隔小で自車位置マークを点滅させる。そして、ステップS111へ進む。
【0044】
ステップS112が肯定判定されるとステップS303へ進む。ステップS303では、自車位置マークの点滅を終了する。そして、ステップS114へ進む。
【0045】
以上の第3の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0046】
以上の第3の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの点滅の時間間隔を連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの点滅の時間間隔が大から小に徐々に小さくなるようにしてもよい。
【0047】
(2)自車位置マークの点滅の時間間隔の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークが所定の時間間隔で点滅を開始し、車両が誘導交差点を通過すると自車位置マークの点滅が終了するようにしてもよい。
【0048】
(3)自車位置マークの点滅の時間間隔を変更するものであれば、変更する時間間隔は実施形態に限定されない。
【0049】
(4)自車位置マークの点滅を開始するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0050】
−第4の実施形態−
本発明の第4の実施形態のナビゲーション装置を説明する。このナビゲーション装置は、車両が誘導交差点に近づくにしたがって、自車位置マークの形状を変更する。本発明の第4の実施形態のナビゲーション装置の構成は、本発明の第1の実施形態のナビゲーション装置1の構成と同様であるので、本発明の第4の実施形態のナビゲーション装置の構成の説明は省略する。
【0051】
図6のフローチャートを参照して、本発明の第4の実施形態における誘導交差点接近報知処理を説明する。図6の処理は、経路誘導を開始するとスタートするプログラムにより、制御回路11において実行される。表示モニタ16には、推奨経路と、通常形状の自車位置マークとが表されている地図が表示されているものとして説明する。自車位置マークの形状は、通常形状、通常形状の角を丸めた形状および丸形状の3つの形状に変更できるものとする。図2の処理と共通する処理には同じ符号を付し、図2の処理と異なる部分を主に説明する。
【0052】
ステップS105が肯定判定されるとステップS401へ進む。ステップS401では、自車位置マークの形状を通常形状の角を丸めた形状にする。図7(a)に、自車位置マークの表示例を示す。図7(a)は、車両が誘導交差点手前300mに到達したときの自車位置マーク21Aと推奨経路22とを表示した地図20Aを示す図である。図7(a)に示すように、自車位置マーク21Aは通常形状の角を丸めた形状になる。そして、ステップS107へ進む。
【0053】
ステップS109が肯定判定されるとステップS402へ進む。ステップS402では、自車位置マークの形状を丸形状にする。図7(b)に、自車位置マークの表示例を示す。図7(b)は、車両が誘導交差点手前100mに到達したときの自車位置マーク21Bと推奨経路22とを表示した地図20Bを示す図である。図7(b)に示すように、自車位置マーク21Bは丸形状になる。そして、ステップS111へ進む。
【0054】
ステップS112が肯定判定されるとステップS403へ進む。ステップS403では、自車位置マークの形状を通常形状にする。図7(c)に、自車位置マークの表示例を示す。図7(c)は、車両が誘導交差点を通過したときの自車位置マーク21Cと推奨経路22とを表示した地図20Cを示す図である。図7(c)に示すように、自車位置マーク21Cは通常形状になる。そして、ステップS114へ進む。
【0055】
以上の第4の実施形態によるナビゲーション装置でも第1の実施形態と同様の作用効果を奏する。
【0056】
以上の第4の実施形態のナビゲーション装置についても第1の実施形態と同様に次のように変形することができる。
(1)表示モニタ16に広域地図が表示されている場合、現在地と誘導交差点との間の距離に基づいて自車位置マークの形状を連続的に変更するようにしてもよい。たとえば、車両の位置が誘導交差点手前300mの位置から誘導交差点手前100mの位置に移動するにしたがって、自車位置マークの形状が通常形状の角を丸めた形状から丸形状に徐々に変形するようにしてもよい。
【0057】
(2)自車位置マークの形状の変更の段階は2段階に限定されず、1段階でもよいし、3段階以上でもよい。たとえば、車両が誘導交差点に所定距離近づくと自車位置マークの大きさが通常形状から丸形状に変更され、車両が誘導交差点を通過すると自車位置マークの形状が丸形状から通常形状に変更されるようにしてもよい。
【0058】
(3)自車位置マークの形状を変更するものであれば、変更する形状は実施形態に限定されない。
【0059】
(4)自車位置マークの形状を変更するときの誘導交差点までの距離は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離であれば、実施形態に限定されない。
【0060】
現在地を示すマークの表示態様を変更するものであれば、変更するマークの表示態様は表示色、大きさ、表示の点滅および形状に限定されない。
【0061】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0062】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0063】
1 ナビゲーション装置
11 制御回路
16 表示モニタ
20,20A,20B,20C 地図
21,21A,21B,21C 自車位置マーク
22 推奨経路
【特許請求の範囲】
【請求項1】
表示モニタと、
経路を探索する探索手段と、
地図を前記表示モニタに表示させる地図表示制御手段と、
車両の現在地を検出する現在地検出手段と、
前記現在地検出手段によって検出された現在地を示すマークを前記地図上に表示させる現在地表示制御手段と、
前記探索手段によって探索された経路と、前記現在地検出手段によって検出された現在地とに基づいて、前記車両が次に通過する誘導交差点を検出する誘導交差点検出手段と、
前記現在地検出手段により検出された現在地と、前記誘導交差点検出手段により検出された誘導交差点との間の距離を算出する距離算出手段と、
前記地図表示制御手段によって表示された地図の縮尺から、前記地図表示制御手段によって表示された地図は広域地図であるか否かを判定する広域地図判定手段とを備え、
前記現在地表示制御手段は、前記広域地図判定手段によって広域地図であると判定された場合、前記距離算出手段によって算出された距離が予め定めた所定値以下になると、前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示態様を、前記算出された距離が短くなるのに応じて段階的または連続的に変更することを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示色を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの大きさを変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記距離算出手段によって算出された距離が前記所定値以下になると、前記マークを点滅し、その後、前記誘導交差点までの距離が小さくなるにつれて前記マークの点滅の間隔を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの形状を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示態様を段階的に変更することを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至7のいずれか1項に記載のナビゲーション装置において、
前記所定値は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離として定められることを特徴とするナビゲーション装置。
【請求項1】
表示モニタと、
経路を探索する探索手段と、
地図を前記表示モニタに表示させる地図表示制御手段と、
車両の現在地を検出する現在地検出手段と、
前記現在地検出手段によって検出された現在地を示すマークを前記地図上に表示させる現在地表示制御手段と、
前記探索手段によって探索された経路と、前記現在地検出手段によって検出された現在地とに基づいて、前記車両が次に通過する誘導交差点を検出する誘導交差点検出手段と、
前記現在地検出手段により検出された現在地と、前記誘導交差点検出手段により検出された誘導交差点との間の距離を算出する距離算出手段と、
前記地図表示制御手段によって表示された地図の縮尺から、前記地図表示制御手段によって表示された地図は広域地図であるか否かを判定する広域地図判定手段とを備え、
前記現在地表示制御手段は、前記広域地図判定手段によって広域地図であると判定された場合、前記距離算出手段によって算出された距離が予め定めた所定値以下になると、前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示態様を、前記算出された距離が短くなるのに応じて段階的または連続的に変更することを特徴とするナビゲーション装置。
【請求項3】
請求項1または2に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示色を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの大きさを変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記距離算出手段によって算出された距離が前記所定値以下になると、前記マークを点滅し、その後、前記誘導交差点までの距離が小さくなるにつれて前記マークの点滅の間隔を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの形状を変更して前記マークの表示態様を変更することを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記現在地表示制御手段は、前記マークの表示態様を段階的に変更することを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至7のいずれか1項に記載のナビゲーション装置において、
前記所定値は、ドライバーが誘導交差点で行う運転操作の準備のために必要な距離として定められることを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−117801(P2011−117801A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−274666(P2009−274666)
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]