
ナビゲーション装置
【課題】 自車位置マークが道路外に表示される場合でも自車位置周辺の状況を容易に認識することができる「ナビゲーション装置」を提供する。
【解決手段】 本発明のナビゲーション装置は、自車位置を検出する検出手段と、検出された自車位置周辺の道路地図データを表示する表示手段と、自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、自車位置マークが道路地図データ上の道路外であるか否かを判定する判定手段と、自車位置マークが道路外と判定されたとき、道路地図データ上に周囲の地域名称を表示する地域名称表示手段とを有する。
【解決手段】 本発明のナビゲーション装置は、自車位置を検出する検出手段と、検出された自車位置周辺の道路地図データを表示する表示手段と、自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、自車位置マークが道路地図データ上の道路外であるか否かを判定する判定手段と、自車位置マークが道路外と判定されたとき、道路地図データ上に周囲の地域名称を表示する地域名称表示手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に、ディスプレイ上に自車位置周辺の道路地図データを表示するときの技術に関する。
【背景技術】
【0002】
ナビゲーション装置は、GPS衛星や自立航法センサを用いて自車位置を検出し、自車位置周辺の道路地図データをディスプレイに表示する。道路地図データ上には、自車位置が分かるように自車位置マークが合成して表示される。自車位置マーク以外にも、方位や、自車が走行している道路の名称や交差点などの案外が表示される。例えば、特許文献1は、自車位置から最も近い交差点ノードを探し出し、その交差点方面情報を道路地図データ上に合成して表示するナビゲーション装置を開示している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−206176号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ナビゲーション装置は、全国または地域をカバーする道路地図データを記憶装置に格納している。一般に、道路地図データは、図葉単位で管理され、自車位置に該当する図葉の道路地図データが記憶装置から読み出され、これがディスプレイに表示される。記憶装置に格納される地図データベース(DB)は、定期的に更新される必要があるが、近年、その更新方法が容易化され、リアルタイム性を高めるような工夫が施されている。
【0005】
しかし、新しい地図DBがリリースされた直後に更新を行ったとしても、更新された地図DBと実際の道路との間には時差があり(例えば、数ヶ月前のものもあり)、さらに、地図DBの更新が有料であると、ユーザーは、なかなか地図DBを更新しない。また、通信により地図DBをタイムリーに更新できる通信ナビゲーション装置を含め、高速道路や首都高速道路などの主要幹線道路のような更新データを開通日により近いタイミングで配信する無料サービスもあるが、一般道路などは地図DBに反映される優先順位が低いことから、実際の道路開通状況と、ユーザーが使用している道路地図データの差異が埋まらないことも多い。
【0006】
結果的に表示に使用される地図DBが古いままでは、多かれ少なかれ、ナビゲーション装置において自車位置マークが道なき道を走行するような事態が生じ、そのような場合には、ユーザー自身がどこを走行しているのか認識することができず、ユーザーに不安を生じさせてしまうケースも少なくない。勿論、道なき道を走行中の表示状態でも、一般的に方位などが示されるが、知らない場所では、方位情報だけでは不十分である。
【0007】
本発明は、上記従来の課題を解決するものであり、自車位置マークが道路外に表示される場合でも自車位置周辺の状況を容易に認識することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係るナビゲーション装置は、自車位置を検出する検出手段と、検出された自車位置周辺の道路地図データを表示する表示手段と、自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、自車位置マークが道路地図データ上の道路外にあるか否かを判定する判定手段と、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示する地域名称表示手段とを有する。
【0009】
好ましくは前記地域名称表示手段は、自車の走行速度に応じて地域名称の表示レベルを変更する。好ましくは前記地域名称表示手段は、走行速度がしきい値を超えるとき、第1の行政区画レベルに属する地域名称を表示し、しきい値以下のとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である。好ましくは前記地域名称表示手段は、自車が高速道路を走行しているか否かを判定し、高速道路を走行している判定したとき、第1の行政区画レベルに属する地域名称を表示し、高速道路を走行していないと判定したとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である。好ましくは前記地域名称表示手段は、道路地図データの表示スケールに応じて地域名称の表示レベルを変更する。好ましくは前記判定手段は、自車位置マークが隣接する道路から一定距離および一定時間離れたとき、道路外にあると判定する。
【0010】
さらに本発明に係るナビゲーション装置における道路地図データの表示方法であって、自車位置を検出するステップと、自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップとを有する。また、ナビゲーション装置が実行する道路地図データの表示プログラムは、自車位置を検出するステップと、自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップとを有する。
【発明の効果】
【0011】
本発明によれば、例えば地図データベースが未更新で新設道路が地図データベースに反映されておらず自車位置マークが道路外に表示された場合には、自車位置周辺の地域名称を表示することで、自車のおおまかな進行方向、位置、方位などの情報をユーザーに提供することができ、ユーザーの不安を解消することができる。さらに、自車の走行速度や、高速道路の走行か否かの判定、道路地図データの表示スケールに応じて地域名称の表示レベルを変更することで、状況または条件に合った適切なレベルの地域情報を与えることができる。
【図面の簡単な説明】
【0012】
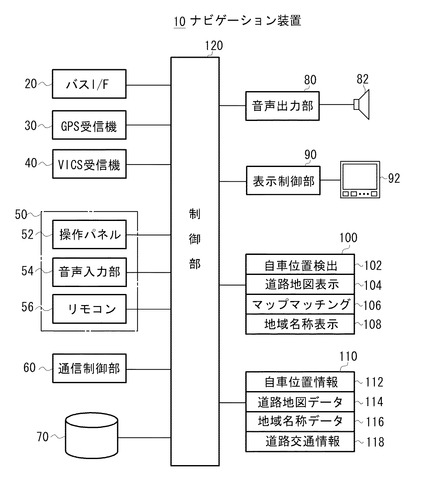
【図1】本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。
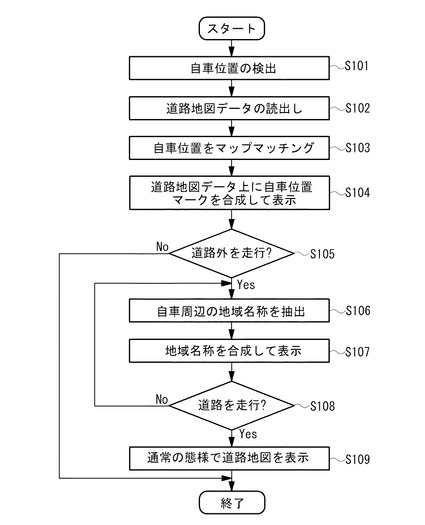
【図2】本発明の実施例に係るナビゲーション装置の基本動作を説明するフローチャートである。
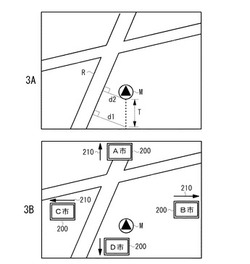
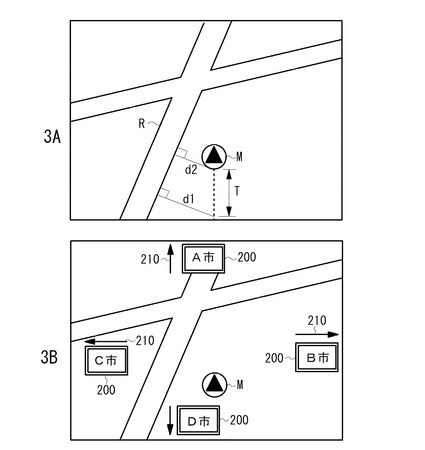
【図3】図3Aは、自車位置マークが道路上にマッピングされていないときの表示例を示し、図3Bは、本実施例により自車位置周辺の地域名称が表示された例を示す。
【図4】地図スケールと行政区画の地域名称の表示レベルとの関係を示すテーブルである。
【図5】本発明の実施例に係るナビゲーション装置の第1の動作例を説明するフローチャートである。
【図6】第1の動作例における、地図スケールおよび高速道路の走行と地域名称の表示レベルとの関係を規定した例である。
【図7】本実施例の第1の動作例による地域名称の表示例である。
【図8】本発明の実施例に係るナビゲーション装置の第2の動作例を説明するフローチャートである。
【図9】第2の動作例における、地図スケールおよび走行速度と地域名称の表示レベルとの関係を規定した例である。
【発明を実施するための形態】
【0013】
次に、本発明の実施の形態について図面を参照して詳細に説明する。本実施の形態では、車両に搭載可能なナビゲーション装置を例示する。
【実施例】
【0014】
図1は、本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。本実施例のナビゲーション装置10は、車両側から種々のデータを受け取る車内バスインターフェース(I/F)20、GPS衛星からの信号を受信して移動体の位置を検出するGPS受信機30、VICSセンタから配信される道路交通情報を受信するVICS受信機40、ユーザーからの入力を受け取る入力部50、無線または有線を介して外部機器とデータ通信をする通信制御部60、大容量の記憶媒体を含む記憶部70、スピーカ82から音声案内等を出力させる音声出力部80、ディスプレイ92に道路地図画面等を表示させる表示制御部90、プログラムを記憶するプログラムメモリ100、データを一時的に記憶するデータメモリ110、プログラムを実行することで各部を制御する制御部120を含んで構成される。
【0015】
バスI/F20は、自立航法センサ(例えば、車速センサや加速度センサ、ジャイロセンサ等)によって検出された信号、自車のパーキングのオン/オフを示す信号などを受け取り、これを制御部120へ提供する。VICS受信機40は、光ビーコン、電波ビーコン、FM多重放送などによりVICSセンタ側から配信されたリアルタイムな渋滞情報や規制情報を受信し、これを制御部120へ提供する。入力部50は、ディスプレイ92に併設された操作(タッチ)パネル52、音声により入力を可能にする音声入力部54、およびリモコン56を含み、これらの入力信号を制御部120へ提供する。
【0016】
記憶部70は、ナビゲーションに必要な地図データベースを格納する。道路地図データには、道路を識別するためのリンクデータ、交差点を識別するためのノードデータ、施設等のPOIを識別する施設データなどが含まれる。リンクデータは、道路種別、道路名称、幅員、規制、開始ノードと終端ノードの座標などを含んでいる。交差点ノードは、リンクノードの開始ノードや終端ノードとの接続関係を示す情報や交差点種別等の情報を含んでいる。施設データには、レストラン、ガソリンスタンド、観光地などの種々の施設に関する情報、例えば施設のカテゴリー(またはジャンル)、施設データに該当するランドマーク(またはアイコン)、施設の座標などが含まれる。記憶部70に格納された地図データベースは、通信制御部60などを利用して適宜更新することができる。
【0017】
プログラムメモリ100は、自立航法センサやGPS受信機30からの検出信号に基づき自車位置を検出する自車位置検出プログラム102、検出された自車位置周辺の道路地図データを記憶部70から読み出しこれを表示制御部90を介してディスプレイ92に表示する道路地図表示プログラム104、道路地図データ上に自車位置をマップマッチングし自車位置を示す自車位置マークを道路地図データ上に合成させるマップマッチングプログラム106、自車位置マークが道路外にあるか否かを判定し道路外にあると判定されたとき自車位置周辺の地域名称を道路地図データ上に合成させる地域名称表示プログラム108を備えている。これ以外にも、プログラムメモリ100は、ナビゲーション装置に必要なプログラム、例えば、自車位置やその他の位置から目的地や誘導経路までの最適なルートを探索しこれを案内するルート探索プログラム、通信サーバから道路地図データの更新データをダウンロードする地図DB更新プログラムなどを備えている。
【0018】
データメモリ110は、GPS受信機30で受信された自車位置情報112、記憶部70から読み出した道路地図データ114、地域名称を表示するときに抽出された地域名称データ116、VICS受信機40で受信された道路交通情報118などを記憶する。
【0019】
次に、本実施例のナビゲーション装置の基本動作を図2のフローチャートを参照して説明する。先ず、自車の走行の開始に伴い、GPS受信機30や自立航法センサの出力に基づき自車位置が検出される(ステップS101)。自車位置は、緯度、経度の2次元情報、あるいはこれに高度を加えた3次元情報を含む。
【0020】
自車位置が検出されると、制御部120(地図表示プログラム104)は、記憶部70から自車位置に該当する道路地図データを読み出す(ステップS102)。記憶部70には、通常、図葉単位で道路地図データが記憶されているので、該当する1つ若しくは複数の図葉が読み出され、これがデータメモリ110に保持される。
【0021】
次に、制御部120(マップマッチングプログラム106)は、自車位置を道路地図データの道路上にマッピングさせる(ステップS103)。マッチマッピングは、例えば、自車の走行軌跡のパターンに近似する道路パターンを抽出し当該道路上に自車位置をマッピングする方法や、自車の進行方向に一致する隣接の道路に検索しその道路に自車位置を投影する方法などが知られている。マップマッチング処理により自車位置マークが適切に道路上に表示される。但し、地図データベースが未更新であり、道路地図データに新設の道路が反映されていないような場合には、たとえ自車位置が正確に検出されたとしても、自車位置を新設の道路上にマッチングさせることはできない。また、自車位置の検出精度が一定以上悪くなった場合にも道路上にマッチングさせることができなくなる。
【0022】
次に、制御部120は、自車位置周辺の道路地図データをディスプレイに表示させると同時に、マップマッチングの結果に基づき、道路地図データ上に自車位置マークを合成して表示させる(ステップS104)。自車の走行中、自車位置が更新され、道路地図画面がスクロールされる。
【0023】
次に、制御部120(地域名称表示プログラム108)は、自車位置マークが道路地図データの道路上に表示されているかを監視する(ステップS105)。上記したように地図データベースが未更新であるような場合には、自車は、実際には存在する道路を走行しているにもかかわらず、道路地図画面上では道なき道を走行するような表示となる。図3Aは、自車位置が道路外にあるときの表示例である。自車位置マークMは、道なき道(破線で示す)を走行しているかの如く表示される。制御部120は、好ましくは、自車位置マークMが隣接する道路Rから一定の距離を離れた状態で一定時間走行したとき(または一定距離を走行したとき)、自車が道路外を走行していると判定する。一時的または瞬間的に自車位置マークが道路から逸脱するのは、自車位置の検出精度に基づくエラーと考えられるからである。
【0024】
図3Aに示すように、自車位置マークMが道路外となった時点で、自車の進行方向に近似する方向にありかつ自車位置マークMから最寄の道路R(マップマッチングの最適な候補)を検索し、次いで、自車位置マークMから道路Rへ垂線を下ろしたときの距離d1を算出する。距離d1がしきい値を越えるか否かを判定し、しきい値を超える場合には、距離d1の算出から一定時間Tが経過したときに、再度、自車位置マークMから道路Rまでの距離d2を算出し、距離d2がしきい値を越えるか否かを判定する。距離d1、d2がしきい値を越えていれば、自車位置マークMが道路外であると判定する。
【0025】
自車位置マークが道路上に表示されていないと判定されると、制御部120は、自車位置周辺の地域名称を抽出し(ステップS106)、抽出された地域名称を自動的に道路地図画面上に表示する(ステップS107)。制御部120は、自車位置が再び道路にマッチングされたとき(ステップS108)、地域名称の表示を自動的に停止し、通常の態様で道路地図データを表示する(ステップS109)。
【0026】
自車位置が道路上にマッピングされている場合には、自車が走行している道路の名称や交差点などの案内情報が表示されるが、道なき道を走行している場合には、そのような情報をユーザーに提示することができない。そこで、自車位置が道路外にあると判定されている間、道路地図データ上に自車位置周囲の地域名称を自動的に表示し、ユーザーに大まかな現在位置と進行方向を認識させ、ユーザーの不安を解消する。
【0027】
図3Bは、自車位置マークが道路上に表示されていないと判定された場合の地域名称の表示例である。同図の例は、自車の進行方向が常に画面の上になるヘッディングアップの表示であり、自車位置を中心に、4つの方位の地域名称200として、A市、B市、C市、D市が道路地図データ上に合成して表示される。ここで、自車はX市を走行中であり、A市は、自車が進行する方向にある地域名称であり、D市は、自車が進行する方向と反対方向にある地域名称であり、B市、C市は、自車の進行方向に対してほぼ直交する方位にある地域名称である。地域名称200と併せて、それらの方位の理解が容易になるように、方位矢印210が表示される。さらに、地域名称200および方位210は、一時的なものであり、通常の道路地図データの表記とは異なることを容易に認識させるような特殊な態様(例えば、赤色、点滅表示、強調表示、透過表示など)で表示させることができる。また、図3Bでは、自車位置を中心に4つの方位の地域名称を示しているが、これに限らず、自車位置の前方および後方の2つの方位、自車位置の左右の2つの方位であってもよいし、さらに詳細に5つ以上の方位の地域名称を表示させるようにしてもよい。さらに、道路地図データがノースアップで表示される場合には、自車位置を中心に、例えば東西南北等の方位の地域名称が表示される。
【0028】
次に、地域名称の抽出方法について説明する。先ず、現在の自車位置の緯度、経度から現在位置の行政区画レベルの地域名称を抽出する。抽出は、記憶部70に記憶された地図データベースを検索することによって行われる。行政区画の最上位は、都、道、府、県、次のレベルが、市、区、(または郡)、次のレベルが町、村などに分類される。次に、自車位置周辺の表示すべき地域名称の行政区画レベルを抽出する。どのレベルの地域名称を表示するかは、例えば、自車が高速道路を走行しているか否かの判定、自車の走行速度、道路地図データの表示スケール等の条件によって行うことができる。
【0029】
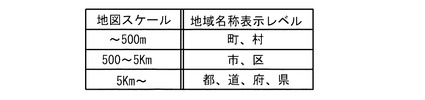
地図スケールが広域である場合には、現在位置の行政区画の上位レベルと隣接する行政区画の地域名称を抽出する。例えば、現在位置が、A県であるとき、A県に隣接するB県の地域名称を抽出する。狭域である場合には、現在位置の行政区画の下位レベルと隣接する行政区画の地域名称を抽出する。例えば、現在位置が、A市であるとき、A市に隣接するB市の地域名称を抽出する。図4は、地図スケールと行政区画の地域名称の表示レベルとの関係を示した一例である。地図スケールが、例えば、500メートルの場合には、現在位置の町、村と隣接する町、村を抽出し、500〜5Kmの場合には、現在位置の市、区と隣接する市、区を抽出し、5Km以上の場合には、現在位置の都道府県と隣接する都道府県を抽出する。
【0030】
また、現在位置の行政区画と隣接する行政区画の地域名称を抽出する以外にも、自車位置から一定距離にある行政区画の地域名称を抽出するようにしてもよい。例えば、自車位置から10Km先の行政区画の地域名称を抽出するようにしてもよい。この場合には、地域名称には、「10Km先は、A市」などと距離情報を一緒に表示する。
【0031】
上記では行政区画に基づき地域名称を抽出する例を示したが、これ以外にも、自車位置周辺の交差点名称を地域名称として抽出するようにしてもよい。例えば、自車位置から最も近い道路、好ましくは国道などの幹線道路を検索し、当該幹線道路の前方にある交差点名称、後方にある交差点名称、前方または後方の交差点を右左折したときの最初の交差点名称を抽出することで、自車位置周辺のおおまかな4つの方位の交差点名称を提示することができる。
【0032】
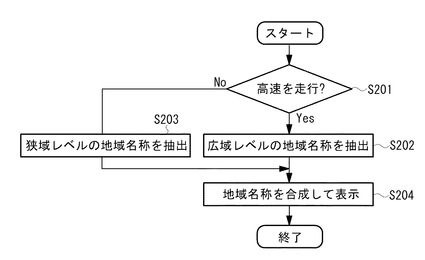
次に、本実施例の好ましい第1の動作例について図5のフローチャートを参照して説明する。図2の基本動作で示したステップS101からステップS105までのフローは、第1の動作例においても同様である。制御部120によって自車位置が道路外であると判定されると(ステップS105)、さらに制御部120は、自車が高速道路を走行しているか否かを判定する(ステップS201)。高速道路を走行しているか否かは、好ましくは、VICS受信機40が電波ビーコンを受信した場合には高速道路を走行していると判定し、電波ビーコン以外、すなわち光ビーコン等を受信した場合には高速道路ではないと判定する。一般に、高速道路には、電波ビーコンが受信されるようになっているためである。
【0033】
自車が高速道路を走行していると判定された場合には、広域レベルの地域名称を抽出し(ステップS202)、高速道路以外と判定された場合には、狭域レベルの地域名称を抽出する(ステップS203)。高速道路を走行している場合には、走行速度が速くしかも通過する場合が多いため大雑把な表示が望ましい。広域レベルの地域名称は、行政区画の上位階層の地域名称であり、例えば都道府県の名称であり、狭域レベルの地域名称は、行政区画の下位階層の地域名称であり、例えば市区町村の名称である。そして、制御部120は、第1の実施例のときと同様に、抽出された地域名称を道路地図画面上に合成して表示する(ステップS304)。
【0034】
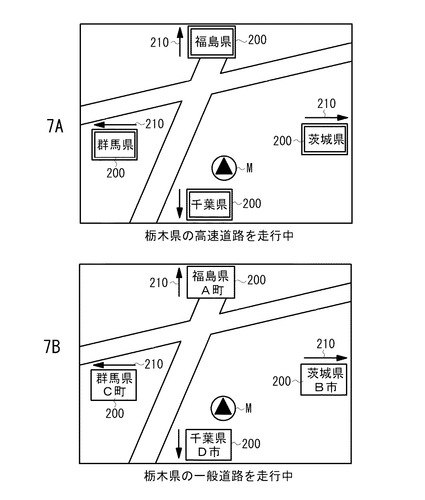
図7Aは、高速道路を走行していると判定されたときの地域名称の表示例であり、図7Bは、一般道路を走行していると判定されたときの地域名称の表示例である。図7Aでは、自車が栃木県の高速道路走行しており、この場合には、自車位置を中心に栃木県に隣接する福島県、茨城県、群馬県、千葉県の地域名称200が表示されている。図7Bでは、自車が栃木県の一般道路を走行しており、この場合には、都道府県の下位に属する市区町村レベルの地域名称200が都道府県と一緒に表示される。
【0035】
第1の動作例によれば、走行速度が速くなる高速道路を走行しているか否かの判定に応じて適切なレベルの地域名称が表示されるため、ユーザーは、自車の走行速度に応じて大雑把な位置を認識することができる。なお、上記の例では、高速道路か否かを判定したが、高速道路と同様に有料道路を走行しているか否かを判定し、有料道路と判定された場合には広域レベルの地域名称を表示するようにしてもよい。
【0036】
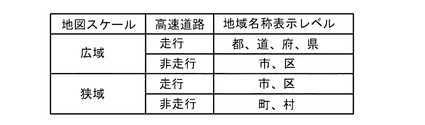
さらに、第1の動作例は、道路地図データの地図スケールとの組合せによって地域名称の表示レベルを変更することができる。図6は、地図スケールおよび高速道路と地域名称の表示レベルとの関係を規定した例である。同図に示すように、地図スケールが広域の場合に、高速道路を走行していると判定されると、広域レベルの地域名称(都道府県)が表示され、高速道路を非走行と判定されると、狭域レベルの地域名称(市区)が表示され、他方、地図スケールが狭域の場合に、高速道路を走行していると判定されると、市区レベルの広域の地域名称が表示され、高速道路を非走行と判定されると、町村レベルの狭域の地域名称が表示されるようにしてもよい。
【0037】
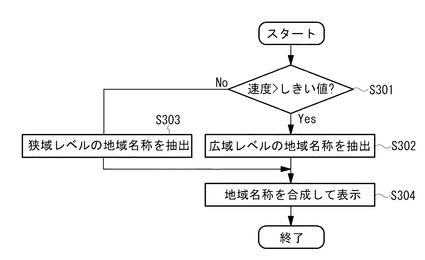
次に、本実施例の第2の好ましい動作例について図8のフローチャートを参照して説明する。図2の基本動作で示したステップS101からステップS105までのフローは、第2の動作例においても同様である。制御部120によって自車位置が道路外であると判定されると(ステップS105)、さらに制御部120は、自車の走行速度をバスI/F20から取得し、走行速度がしきい値より大きいか否かを判定する(ステップS301)。走行速度がしきい値よりも大きい場合には、広域レベルの地域名称を抽出し(ステップS302)、しきい値以下である場合には、狭域レベルの地域名称を抽出する(ステップS303)。広域レベルの地域名称は、例えば、行政区画の上位階層の地域名称であり、狭域レベルの地域名称は、例えば、行政区画の下位階層の地域名称である。制御部120は、第1の実施例のときと同様に、抽出された地域名称を道路地図画面上に合成して表示する(ステップS304)。
【0038】
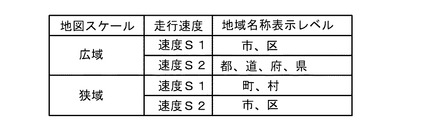
第2の動作例のように走行速度に応じて地域名称の表示レベルを変更することで、自車の走行速度に応じた適切な地域名称を提示することができる。なお、上記の例では、走行速度を2段階で判別したが、これに限らず、3段階以上で判別し、それに応じた表示レベルの地域名称を抽出し、表示してもよい。さらに地図スケールと組み合わせて、地域名称の表示レベルを決定するようにしてもよい。図9は、地図スケールおよび走行速度と地域名称の表示レベルとの関係を規定した例である。地図スケールが広域であり、車速がS1のとき(相対的に速度が小さいとき)、地域名称の表示レベルを狭域レベルである市、区とし、車速が相対的に大きいS2(S2>S1)のとき、表示レベルを広域である都道府県レベルとする。また、地図スケールが狭域のときにも、車速がS1とS2のときで、表示レベルを広域または狭域に変更することができる。
【0039】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0040】
上記実施例では、車両に搭載可能なナビゲーション装置を例示したが、本発明のナビゲーション装置は、着脱可能な携帯用ナビゲーション装置はもとりより、ナビゲーション機能を一部に包含する携帯電話機、携帯情報端末装置も含む。さらに、ナビゲーション機能、オーディオ機能、ビデオ機能を有するような電子装置も含む。
【符号の説明】
【0041】
10:ナビゲーション装置 20:バスインターフェース(I/F)
30:GPS受信機 40:VICS・FM多重レシーバ
50:入力部 60:通信制御部
70:記憶部 80:音声出力部
90:表示制御部 100:プログラムメモリ
110:データメモリ 120:制御部
200:地域名称 210:地域名称の方位
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に、ディスプレイ上に自車位置周辺の道路地図データを表示するときの技術に関する。
【背景技術】
【0002】
ナビゲーション装置は、GPS衛星や自立航法センサを用いて自車位置を検出し、自車位置周辺の道路地図データをディスプレイに表示する。道路地図データ上には、自車位置が分かるように自車位置マークが合成して表示される。自車位置マーク以外にも、方位や、自車が走行している道路の名称や交差点などの案外が表示される。例えば、特許文献1は、自車位置から最も近い交差点ノードを探し出し、その交差点方面情報を道路地図データ上に合成して表示するナビゲーション装置を開示している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−206176号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ナビゲーション装置は、全国または地域をカバーする道路地図データを記憶装置に格納している。一般に、道路地図データは、図葉単位で管理され、自車位置に該当する図葉の道路地図データが記憶装置から読み出され、これがディスプレイに表示される。記憶装置に格納される地図データベース(DB)は、定期的に更新される必要があるが、近年、その更新方法が容易化され、リアルタイム性を高めるような工夫が施されている。
【0005】
しかし、新しい地図DBがリリースされた直後に更新を行ったとしても、更新された地図DBと実際の道路との間には時差があり(例えば、数ヶ月前のものもあり)、さらに、地図DBの更新が有料であると、ユーザーは、なかなか地図DBを更新しない。また、通信により地図DBをタイムリーに更新できる通信ナビゲーション装置を含め、高速道路や首都高速道路などの主要幹線道路のような更新データを開通日により近いタイミングで配信する無料サービスもあるが、一般道路などは地図DBに反映される優先順位が低いことから、実際の道路開通状況と、ユーザーが使用している道路地図データの差異が埋まらないことも多い。
【0006】
結果的に表示に使用される地図DBが古いままでは、多かれ少なかれ、ナビゲーション装置において自車位置マークが道なき道を走行するような事態が生じ、そのような場合には、ユーザー自身がどこを走行しているのか認識することができず、ユーザーに不安を生じさせてしまうケースも少なくない。勿論、道なき道を走行中の表示状態でも、一般的に方位などが示されるが、知らない場所では、方位情報だけでは不十分である。
【0007】
本発明は、上記従来の課題を解決するものであり、自車位置マークが道路外に表示される場合でも自車位置周辺の状況を容易に認識することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係るナビゲーション装置は、自車位置を検出する検出手段と、検出された自車位置周辺の道路地図データを表示する表示手段と、自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、自車位置マークが道路地図データ上の道路外にあるか否かを判定する判定手段と、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示する地域名称表示手段とを有する。
【0009】
好ましくは前記地域名称表示手段は、自車の走行速度に応じて地域名称の表示レベルを変更する。好ましくは前記地域名称表示手段は、走行速度がしきい値を超えるとき、第1の行政区画レベルに属する地域名称を表示し、しきい値以下のとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である。好ましくは前記地域名称表示手段は、自車が高速道路を走行しているか否かを判定し、高速道路を走行している判定したとき、第1の行政区画レベルに属する地域名称を表示し、高速道路を走行していないと判定したとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である。好ましくは前記地域名称表示手段は、道路地図データの表示スケールに応じて地域名称の表示レベルを変更する。好ましくは前記判定手段は、自車位置マークが隣接する道路から一定距離および一定時間離れたとき、道路外にあると判定する。
【0010】
さらに本発明に係るナビゲーション装置における道路地図データの表示方法であって、自車位置を検出するステップと、自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップとを有する。また、ナビゲーション装置が実行する道路地図データの表示プログラムは、自車位置を検出するステップと、自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップとを有する。
【発明の効果】
【0011】
本発明によれば、例えば地図データベースが未更新で新設道路が地図データベースに反映されておらず自車位置マークが道路外に表示された場合には、自車位置周辺の地域名称を表示することで、自車のおおまかな進行方向、位置、方位などの情報をユーザーに提供することができ、ユーザーの不安を解消することができる。さらに、自車の走行速度や、高速道路の走行か否かの判定、道路地図データの表示スケールに応じて地域名称の表示レベルを変更することで、状況または条件に合った適切なレベルの地域情報を与えることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。
【図2】本発明の実施例に係るナビゲーション装置の基本動作を説明するフローチャートである。
【図3】図3Aは、自車位置マークが道路上にマッピングされていないときの表示例を示し、図3Bは、本実施例により自車位置周辺の地域名称が表示された例を示す。
【図4】地図スケールと行政区画の地域名称の表示レベルとの関係を示すテーブルである。
【図5】本発明の実施例に係るナビゲーション装置の第1の動作例を説明するフローチャートである。
【図6】第1の動作例における、地図スケールおよび高速道路の走行と地域名称の表示レベルとの関係を規定した例である。
【図7】本実施例の第1の動作例による地域名称の表示例である。
【図8】本発明の実施例に係るナビゲーション装置の第2の動作例を説明するフローチャートである。
【図9】第2の動作例における、地図スケールおよび走行速度と地域名称の表示レベルとの関係を規定した例である。
【発明を実施するための形態】
【0013】
次に、本発明の実施の形態について図面を参照して詳細に説明する。本実施の形態では、車両に搭載可能なナビゲーション装置を例示する。
【実施例】
【0014】
図1は、本発明の実施例に係るナビゲーション装置の構成を示すブロック図である。本実施例のナビゲーション装置10は、車両側から種々のデータを受け取る車内バスインターフェース(I/F)20、GPS衛星からの信号を受信して移動体の位置を検出するGPS受信機30、VICSセンタから配信される道路交通情報を受信するVICS受信機40、ユーザーからの入力を受け取る入力部50、無線または有線を介して外部機器とデータ通信をする通信制御部60、大容量の記憶媒体を含む記憶部70、スピーカ82から音声案内等を出力させる音声出力部80、ディスプレイ92に道路地図画面等を表示させる表示制御部90、プログラムを記憶するプログラムメモリ100、データを一時的に記憶するデータメモリ110、プログラムを実行することで各部を制御する制御部120を含んで構成される。
【0015】
バスI/F20は、自立航法センサ(例えば、車速センサや加速度センサ、ジャイロセンサ等)によって検出された信号、自車のパーキングのオン/オフを示す信号などを受け取り、これを制御部120へ提供する。VICS受信機40は、光ビーコン、電波ビーコン、FM多重放送などによりVICSセンタ側から配信されたリアルタイムな渋滞情報や規制情報を受信し、これを制御部120へ提供する。入力部50は、ディスプレイ92に併設された操作(タッチ)パネル52、音声により入力を可能にする音声入力部54、およびリモコン56を含み、これらの入力信号を制御部120へ提供する。
【0016】
記憶部70は、ナビゲーションに必要な地図データベースを格納する。道路地図データには、道路を識別するためのリンクデータ、交差点を識別するためのノードデータ、施設等のPOIを識別する施設データなどが含まれる。リンクデータは、道路種別、道路名称、幅員、規制、開始ノードと終端ノードの座標などを含んでいる。交差点ノードは、リンクノードの開始ノードや終端ノードとの接続関係を示す情報や交差点種別等の情報を含んでいる。施設データには、レストラン、ガソリンスタンド、観光地などの種々の施設に関する情報、例えば施設のカテゴリー(またはジャンル)、施設データに該当するランドマーク(またはアイコン)、施設の座標などが含まれる。記憶部70に格納された地図データベースは、通信制御部60などを利用して適宜更新することができる。
【0017】
プログラムメモリ100は、自立航法センサやGPS受信機30からの検出信号に基づき自車位置を検出する自車位置検出プログラム102、検出された自車位置周辺の道路地図データを記憶部70から読み出しこれを表示制御部90を介してディスプレイ92に表示する道路地図表示プログラム104、道路地図データ上に自車位置をマップマッチングし自車位置を示す自車位置マークを道路地図データ上に合成させるマップマッチングプログラム106、自車位置マークが道路外にあるか否かを判定し道路外にあると判定されたとき自車位置周辺の地域名称を道路地図データ上に合成させる地域名称表示プログラム108を備えている。これ以外にも、プログラムメモリ100は、ナビゲーション装置に必要なプログラム、例えば、自車位置やその他の位置から目的地や誘導経路までの最適なルートを探索しこれを案内するルート探索プログラム、通信サーバから道路地図データの更新データをダウンロードする地図DB更新プログラムなどを備えている。
【0018】
データメモリ110は、GPS受信機30で受信された自車位置情報112、記憶部70から読み出した道路地図データ114、地域名称を表示するときに抽出された地域名称データ116、VICS受信機40で受信された道路交通情報118などを記憶する。
【0019】
次に、本実施例のナビゲーション装置の基本動作を図2のフローチャートを参照して説明する。先ず、自車の走行の開始に伴い、GPS受信機30や自立航法センサの出力に基づき自車位置が検出される(ステップS101)。自車位置は、緯度、経度の2次元情報、あるいはこれに高度を加えた3次元情報を含む。
【0020】
自車位置が検出されると、制御部120(地図表示プログラム104)は、記憶部70から自車位置に該当する道路地図データを読み出す(ステップS102)。記憶部70には、通常、図葉単位で道路地図データが記憶されているので、該当する1つ若しくは複数の図葉が読み出され、これがデータメモリ110に保持される。
【0021】
次に、制御部120(マップマッチングプログラム106)は、自車位置を道路地図データの道路上にマッピングさせる(ステップS103)。マッチマッピングは、例えば、自車の走行軌跡のパターンに近似する道路パターンを抽出し当該道路上に自車位置をマッピングする方法や、自車の進行方向に一致する隣接の道路に検索しその道路に自車位置を投影する方法などが知られている。マップマッチング処理により自車位置マークが適切に道路上に表示される。但し、地図データベースが未更新であり、道路地図データに新設の道路が反映されていないような場合には、たとえ自車位置が正確に検出されたとしても、自車位置を新設の道路上にマッチングさせることはできない。また、自車位置の検出精度が一定以上悪くなった場合にも道路上にマッチングさせることができなくなる。
【0022】
次に、制御部120は、自車位置周辺の道路地図データをディスプレイに表示させると同時に、マップマッチングの結果に基づき、道路地図データ上に自車位置マークを合成して表示させる(ステップS104)。自車の走行中、自車位置が更新され、道路地図画面がスクロールされる。
【0023】
次に、制御部120(地域名称表示プログラム108)は、自車位置マークが道路地図データの道路上に表示されているかを監視する(ステップS105)。上記したように地図データベースが未更新であるような場合には、自車は、実際には存在する道路を走行しているにもかかわらず、道路地図画面上では道なき道を走行するような表示となる。図3Aは、自車位置が道路外にあるときの表示例である。自車位置マークMは、道なき道(破線で示す)を走行しているかの如く表示される。制御部120は、好ましくは、自車位置マークMが隣接する道路Rから一定の距離を離れた状態で一定時間走行したとき(または一定距離を走行したとき)、自車が道路外を走行していると判定する。一時的または瞬間的に自車位置マークが道路から逸脱するのは、自車位置の検出精度に基づくエラーと考えられるからである。
【0024】
図3Aに示すように、自車位置マークMが道路外となった時点で、自車の進行方向に近似する方向にありかつ自車位置マークMから最寄の道路R(マップマッチングの最適な候補)を検索し、次いで、自車位置マークMから道路Rへ垂線を下ろしたときの距離d1を算出する。距離d1がしきい値を越えるか否かを判定し、しきい値を超える場合には、距離d1の算出から一定時間Tが経過したときに、再度、自車位置マークMから道路Rまでの距離d2を算出し、距離d2がしきい値を越えるか否かを判定する。距離d1、d2がしきい値を越えていれば、自車位置マークMが道路外であると判定する。
【0025】
自車位置マークが道路上に表示されていないと判定されると、制御部120は、自車位置周辺の地域名称を抽出し(ステップS106)、抽出された地域名称を自動的に道路地図画面上に表示する(ステップS107)。制御部120は、自車位置が再び道路にマッチングされたとき(ステップS108)、地域名称の表示を自動的に停止し、通常の態様で道路地図データを表示する(ステップS109)。
【0026】
自車位置が道路上にマッピングされている場合には、自車が走行している道路の名称や交差点などの案内情報が表示されるが、道なき道を走行している場合には、そのような情報をユーザーに提示することができない。そこで、自車位置が道路外にあると判定されている間、道路地図データ上に自車位置周囲の地域名称を自動的に表示し、ユーザーに大まかな現在位置と進行方向を認識させ、ユーザーの不安を解消する。
【0027】
図3Bは、自車位置マークが道路上に表示されていないと判定された場合の地域名称の表示例である。同図の例は、自車の進行方向が常に画面の上になるヘッディングアップの表示であり、自車位置を中心に、4つの方位の地域名称200として、A市、B市、C市、D市が道路地図データ上に合成して表示される。ここで、自車はX市を走行中であり、A市は、自車が進行する方向にある地域名称であり、D市は、自車が進行する方向と反対方向にある地域名称であり、B市、C市は、自車の進行方向に対してほぼ直交する方位にある地域名称である。地域名称200と併せて、それらの方位の理解が容易になるように、方位矢印210が表示される。さらに、地域名称200および方位210は、一時的なものであり、通常の道路地図データの表記とは異なることを容易に認識させるような特殊な態様(例えば、赤色、点滅表示、強調表示、透過表示など)で表示させることができる。また、図3Bでは、自車位置を中心に4つの方位の地域名称を示しているが、これに限らず、自車位置の前方および後方の2つの方位、自車位置の左右の2つの方位であってもよいし、さらに詳細に5つ以上の方位の地域名称を表示させるようにしてもよい。さらに、道路地図データがノースアップで表示される場合には、自車位置を中心に、例えば東西南北等の方位の地域名称が表示される。
【0028】
次に、地域名称の抽出方法について説明する。先ず、現在の自車位置の緯度、経度から現在位置の行政区画レベルの地域名称を抽出する。抽出は、記憶部70に記憶された地図データベースを検索することによって行われる。行政区画の最上位は、都、道、府、県、次のレベルが、市、区、(または郡)、次のレベルが町、村などに分類される。次に、自車位置周辺の表示すべき地域名称の行政区画レベルを抽出する。どのレベルの地域名称を表示するかは、例えば、自車が高速道路を走行しているか否かの判定、自車の走行速度、道路地図データの表示スケール等の条件によって行うことができる。
【0029】
地図スケールが広域である場合には、現在位置の行政区画の上位レベルと隣接する行政区画の地域名称を抽出する。例えば、現在位置が、A県であるとき、A県に隣接するB県の地域名称を抽出する。狭域である場合には、現在位置の行政区画の下位レベルと隣接する行政区画の地域名称を抽出する。例えば、現在位置が、A市であるとき、A市に隣接するB市の地域名称を抽出する。図4は、地図スケールと行政区画の地域名称の表示レベルとの関係を示した一例である。地図スケールが、例えば、500メートルの場合には、現在位置の町、村と隣接する町、村を抽出し、500〜5Kmの場合には、現在位置の市、区と隣接する市、区を抽出し、5Km以上の場合には、現在位置の都道府県と隣接する都道府県を抽出する。
【0030】
また、現在位置の行政区画と隣接する行政区画の地域名称を抽出する以外にも、自車位置から一定距離にある行政区画の地域名称を抽出するようにしてもよい。例えば、自車位置から10Km先の行政区画の地域名称を抽出するようにしてもよい。この場合には、地域名称には、「10Km先は、A市」などと距離情報を一緒に表示する。
【0031】
上記では行政区画に基づき地域名称を抽出する例を示したが、これ以外にも、自車位置周辺の交差点名称を地域名称として抽出するようにしてもよい。例えば、自車位置から最も近い道路、好ましくは国道などの幹線道路を検索し、当該幹線道路の前方にある交差点名称、後方にある交差点名称、前方または後方の交差点を右左折したときの最初の交差点名称を抽出することで、自車位置周辺のおおまかな4つの方位の交差点名称を提示することができる。
【0032】
次に、本実施例の好ましい第1の動作例について図5のフローチャートを参照して説明する。図2の基本動作で示したステップS101からステップS105までのフローは、第1の動作例においても同様である。制御部120によって自車位置が道路外であると判定されると(ステップS105)、さらに制御部120は、自車が高速道路を走行しているか否かを判定する(ステップS201)。高速道路を走行しているか否かは、好ましくは、VICS受信機40が電波ビーコンを受信した場合には高速道路を走行していると判定し、電波ビーコン以外、すなわち光ビーコン等を受信した場合には高速道路ではないと判定する。一般に、高速道路には、電波ビーコンが受信されるようになっているためである。
【0033】
自車が高速道路を走行していると判定された場合には、広域レベルの地域名称を抽出し(ステップS202)、高速道路以外と判定された場合には、狭域レベルの地域名称を抽出する(ステップS203)。高速道路を走行している場合には、走行速度が速くしかも通過する場合が多いため大雑把な表示が望ましい。広域レベルの地域名称は、行政区画の上位階層の地域名称であり、例えば都道府県の名称であり、狭域レベルの地域名称は、行政区画の下位階層の地域名称であり、例えば市区町村の名称である。そして、制御部120は、第1の実施例のときと同様に、抽出された地域名称を道路地図画面上に合成して表示する(ステップS304)。
【0034】
図7Aは、高速道路を走行していると判定されたときの地域名称の表示例であり、図7Bは、一般道路を走行していると判定されたときの地域名称の表示例である。図7Aでは、自車が栃木県の高速道路走行しており、この場合には、自車位置を中心に栃木県に隣接する福島県、茨城県、群馬県、千葉県の地域名称200が表示されている。図7Bでは、自車が栃木県の一般道路を走行しており、この場合には、都道府県の下位に属する市区町村レベルの地域名称200が都道府県と一緒に表示される。
【0035】
第1の動作例によれば、走行速度が速くなる高速道路を走行しているか否かの判定に応じて適切なレベルの地域名称が表示されるため、ユーザーは、自車の走行速度に応じて大雑把な位置を認識することができる。なお、上記の例では、高速道路か否かを判定したが、高速道路と同様に有料道路を走行しているか否かを判定し、有料道路と判定された場合には広域レベルの地域名称を表示するようにしてもよい。
【0036】
さらに、第1の動作例は、道路地図データの地図スケールとの組合せによって地域名称の表示レベルを変更することができる。図6は、地図スケールおよび高速道路と地域名称の表示レベルとの関係を規定した例である。同図に示すように、地図スケールが広域の場合に、高速道路を走行していると判定されると、広域レベルの地域名称(都道府県)が表示され、高速道路を非走行と判定されると、狭域レベルの地域名称(市区)が表示され、他方、地図スケールが狭域の場合に、高速道路を走行していると判定されると、市区レベルの広域の地域名称が表示され、高速道路を非走行と判定されると、町村レベルの狭域の地域名称が表示されるようにしてもよい。
【0037】
次に、本実施例の第2の好ましい動作例について図8のフローチャートを参照して説明する。図2の基本動作で示したステップS101からステップS105までのフローは、第2の動作例においても同様である。制御部120によって自車位置が道路外であると判定されると(ステップS105)、さらに制御部120は、自車の走行速度をバスI/F20から取得し、走行速度がしきい値より大きいか否かを判定する(ステップS301)。走行速度がしきい値よりも大きい場合には、広域レベルの地域名称を抽出し(ステップS302)、しきい値以下である場合には、狭域レベルの地域名称を抽出する(ステップS303)。広域レベルの地域名称は、例えば、行政区画の上位階層の地域名称であり、狭域レベルの地域名称は、例えば、行政区画の下位階層の地域名称である。制御部120は、第1の実施例のときと同様に、抽出された地域名称を道路地図画面上に合成して表示する(ステップS304)。
【0038】
第2の動作例のように走行速度に応じて地域名称の表示レベルを変更することで、自車の走行速度に応じた適切な地域名称を提示することができる。なお、上記の例では、走行速度を2段階で判別したが、これに限らず、3段階以上で判別し、それに応じた表示レベルの地域名称を抽出し、表示してもよい。さらに地図スケールと組み合わせて、地域名称の表示レベルを決定するようにしてもよい。図9は、地図スケールおよび走行速度と地域名称の表示レベルとの関係を規定した例である。地図スケールが広域であり、車速がS1のとき(相対的に速度が小さいとき)、地域名称の表示レベルを狭域レベルである市、区とし、車速が相対的に大きいS2(S2>S1)のとき、表示レベルを広域である都道府県レベルとする。また、地図スケールが狭域のときにも、車速がS1とS2のときで、表示レベルを広域または狭域に変更することができる。
【0039】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0040】
上記実施例では、車両に搭載可能なナビゲーション装置を例示したが、本発明のナビゲーション装置は、着脱可能な携帯用ナビゲーション装置はもとりより、ナビゲーション機能を一部に包含する携帯電話機、携帯情報端末装置も含む。さらに、ナビゲーション機能、オーディオ機能、ビデオ機能を有するような電子装置も含む。
【符号の説明】
【0041】
10:ナビゲーション装置 20:バスインターフェース(I/F)
30:GPS受信機 40:VICS・FM多重レシーバ
50:入力部 60:通信制御部
70:記憶部 80:音声出力部
90:表示制御部 100:プログラムメモリ
110:データメモリ 120:制御部
200:地域名称 210:地域名称の方位
【特許請求の範囲】
【請求項1】
自車位置を検出する検出手段と、
検出された自車位置周辺の道路地図データを表示する表示手段と、
自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、
自車位置マークが道路地図データ上の道路外にあるか否かを判定する判定手段と、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示する地域名称表示手段と、
を有するナビゲーション装置。
【請求項2】
前記地域名称表示手段は、自車の走行速度に応じて地域名称の表示レベルを変更する、請求項1に記載のナビゲーション装置。
【請求項3】
前記地域名称表示手段は、走行速度がしきい値を超えるとき、第1の行政区画レベルに属する地域名称を表示し、しきい値以下のとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である、請求項1または2に記載のナビゲーション装置。
【請求項4】
前記地域名称表示手段は、自車が高速道路を走行しているか否かを判定し、高速道路を走行している判定したとき、第1の行政区画レベルに属する地域名称を表示し、高速道路を走行していないと判定したとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である、請求項1に記載のナビゲーション装置。
【請求項5】
前記地域名称表示手段は、道路地図データの表示スケールに応じて地域名称の表示レベルを変更する、請求項1ないし4いずれか1つに記載のナビゲーション装置。
【請求項6】
前記判定手段は、自車位置マークが隣接する道路から一定距離および一定時間離れたとき、道路外にあると判定する、請求項1に記載のナビゲーション装置。
【請求項7】
ナビゲーション装置における道路地図データの表示方法であって、
自車位置を検出するステップと、
自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、
自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップと、
を有する道路地図データの表示方法。
【請求項8】
前記地域名称を合成して表示するステップは、自車の走行速度、高速道路を走行しているか否かの判定、および道路地図データの表示スケールの少なくとも1つに基づき地域名称の表示レベルを変更する、請求項8に記載の道路地図データの表示方法。
【請求項9】
ナビゲーション装置が実行する道路地図データの表示プログラムであって、
自車位置を検出するステップと、
自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、
自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップと、
を有する道路地図データの表示プログラム。
【請求項10】
前記地域名称を合成して表示するステップは、自車の走行速度、高速道路を走行しているか否かの判定、および道路地図データの表示スケールの少なくとも1つに基づき地域名称の表示レベルを変更する、請求項9に記載の道路地図データの表示プログラム。
【請求項1】
自車位置を検出する検出手段と、
検出された自車位置周辺の道路地図データを表示する表示手段と、
自車位置を示す自車位置マークを道路地図データ上に合成して表示する自車位置マーク表示手段と、
自車位置マークが道路地図データ上の道路外にあるか否かを判定する判定手段と、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示する地域名称表示手段と、
を有するナビゲーション装置。
【請求項2】
前記地域名称表示手段は、自車の走行速度に応じて地域名称の表示レベルを変更する、請求項1に記載のナビゲーション装置。
【請求項3】
前記地域名称表示手段は、走行速度がしきい値を超えるとき、第1の行政区画レベルに属する地域名称を表示し、しきい値以下のとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である、請求項1または2に記載のナビゲーション装置。
【請求項4】
前記地域名称表示手段は、自車が高速道路を走行しているか否かを判定し、高速道路を走行している判定したとき、第1の行政区画レベルに属する地域名称を表示し、高速道路を走行していないと判定したとき、第2の行政区画レベルに属する地域名称を表示し、第2の行政区画レベルは、第1の行政区画レベルよりも下位である、請求項1に記載のナビゲーション装置。
【請求項5】
前記地域名称表示手段は、道路地図データの表示スケールに応じて地域名称の表示レベルを変更する、請求項1ないし4いずれか1つに記載のナビゲーション装置。
【請求項6】
前記判定手段は、自車位置マークが隣接する道路から一定距離および一定時間離れたとき、道路外にあると判定する、請求項1に記載のナビゲーション装置。
【請求項7】
ナビゲーション装置における道路地図データの表示方法であって、
自車位置を検出するステップと、
自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、
自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップと、
を有する道路地図データの表示方法。
【請求項8】
前記地域名称を合成して表示するステップは、自車の走行速度、高速道路を走行しているか否かの判定、および道路地図データの表示スケールの少なくとも1つに基づき地域名称の表示レベルを変更する、請求項8に記載の道路地図データの表示方法。
【請求項9】
ナビゲーション装置が実行する道路地図データの表示プログラムであって、
自車位置を検出するステップと、
自車位置周辺の道路地図データを表示するとき、自車位置を示す自車位置マークを道路地図データ上に合成して表示するステップと、
自車位置マークが道路地図データ上の道路外にあるか否かを判定するステップと、
自車位置マークが道路外にあると判定されたとき、道路地図データ上に自車位置周辺の地域名称を合成して表示するステップと、
を有する道路地図データの表示プログラム。
【請求項10】
前記地域名称を合成して表示するステップは、自車の走行速度、高速道路を走行しているか否かの判定、および道路地図データの表示スケールの少なくとも1つに基づき地域名称の表示レベルを変更する、請求項9に記載の道路地図データの表示プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−185735(P2011−185735A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−51211(P2010−51211)
【出願日】平成22年3月9日(2010.3.9)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月9日(2010.3.9)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]