
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関する。
【背景技術】
【0002】
車両にカメラを搭載し、カメラが撮像した映像を利用して運転の支援を行う技術が知られている。例えば特許文献1には、車両に搭載された複数のカメラの出力を合成し、車両を見下ろす視点の画像を出力する車両用映像表示装置が記載されている。運転者はこの画像を見ることにより、車両周辺の状況を容易に把握することができる。
【0003】
他方、車両に搭載されたカメラの映像を運転者に提示するだけではなく、ナビゲーション装置の機能の補助に用いる技術が存在する。例えば特許文献2では、カメラの出力から車線を抽出しマップマッチング処理の精度を高めるカーナビゲーション装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−7299号公報
【特許文献2】特開平9−152348号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に開示されているカーナビゲーション装置は、カメラからの映像を、地図情報と自車位置とのマップマッチングにしか利用していなかった。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、自車両の周辺を撮像し撮像信号を出力する撮像手段と、自車両の走行状態を表す信号を出力するセンサと、撮像手段が出力する撮像信号に基づいてキャリブレーション情報を演算する演算手段と、キャリブレーション情報に基づいて、センサのキャリブレーションを行うキャリブレーション手段と、を備えることを特徴とするナビゲーション装置である。
請求項6に係る発明は、自車両の周辺を撮像し撮像信号を出力する撮像手段と、地図情報を記憶する第1の記憶手段と、自車両の現在位置および方位を記憶する第2の記憶手段と、撮像手段が出力する撮像信号に基づいて補正情報を演算する演算手段と、自車両の速度が所定速度以下である場合、補正情報に基づいて、第2の記憶手段が記憶する自車両の現在位置を補正する第1の補正手段と、補正情報と地図情報とに基づいて、第2の記憶手段が記憶する自車両の方位を補正する第2の補正手段とを備えることを特徴とするナビゲーション装置である。
【発明の効果】
【0007】
本発明によれば、カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能となる。
【図面の簡単な説明】
【0008】
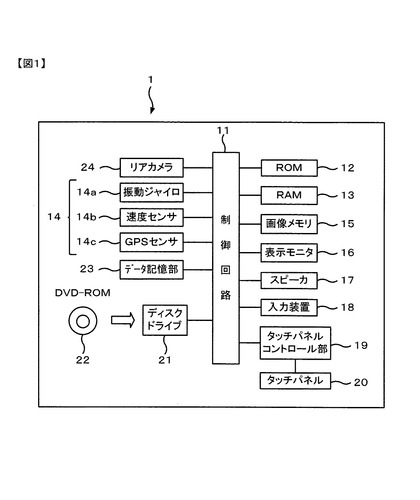
【図1】第1の実施形態におけるナビゲーション装置の全体構成を示すブロック図である。
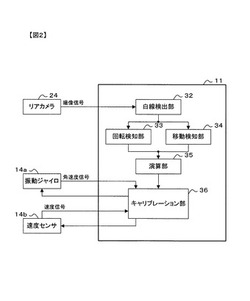
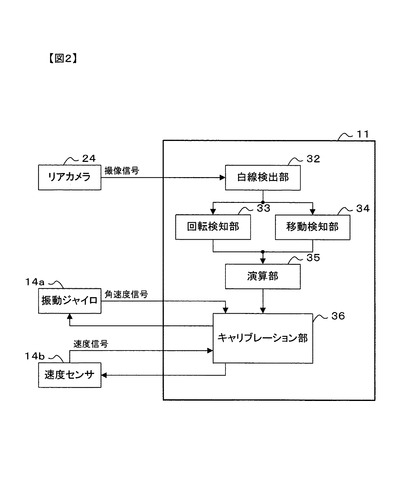
【図2】制御回路11の詳細な構成を示すブロック図である。
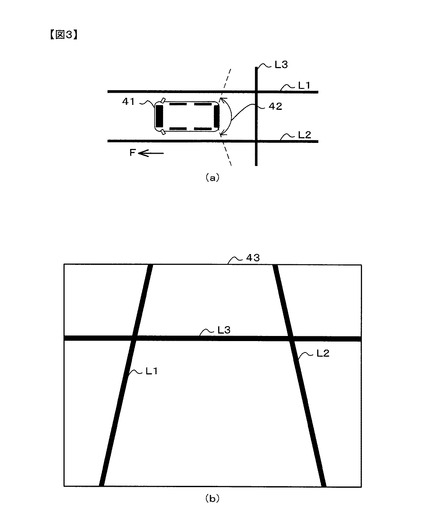
【図3】リアカメラ24による撮像の詳細を説明する図である。
【図4】回転検知部33による回転検知処理を説明する図である。
【図5】移動検知部34による移動検知処理を説明する図である。
【図6】制御回路11によるキャリブレーション処理ならびに補正処理を示すフローチャートである。
【図7】第2の実施の形態におけるナビゲーション装置101の全体構成を示すブロック図である。
【図8】制御回路111の詳細な構成を示すブロック図である。
【図9】制御回路111に接続されたそれぞれのカメラの撮像範囲を示す図である。
【図10】車両周辺の全体を含む画像を解析する処理を説明する平面図である。
【図11】制御回路111による補正処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
(第1の実施の形態)
図1は、本実施形態におけるナビゲーション装置の全体構成を示すブロック図である。
【0010】
ナビゲーション装置1は、各部の制御を行う制御回路11を備えている。制御回路11には、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、タッチパネル20、ディスクドライブ21、データ記憶部23およびリアカメラ24がそれぞれ接続されている。タッチパネル20は、タッチパネルコントロール部19を介して制御回路11に接続されている。ディスクドライブ21には、地図データが記憶されたDVD−ROM22が装填されている。
【0011】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。この制御回路11がDVD−ROM22に記憶された地図データに基づいて所定の経路探索処理を行うと、その処理結果が推奨経路として表示モニタ16に表示される。
【0012】
現在地検出装置14は自車両の現在位置および方位を検出する装置である。現在地検出装置14は、振動ジャイロ14a、速度センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは振動型のジャイロスコープ装置であり、自車両の角速度を検出して角速度信号を出力する。速度センサ14bは、自車両の速度を検出して速度信号を出力する。速度センサ14bには自車両から出力される車速パルス信号が入力される。速度センサ14bは、単位時間あたりのパルス数に1パルスあたりの速度を乗じることで自車両の速度を検出する。GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された自車両の現在位置および方位をRAM13に格納する。そして、RAM13に格納されたこれらのデータに基づいて、地図の表示範囲の決定、経路探索開始点の決定、地図上への現在位置の表示、などの処理を実行する。
【0013】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなる。これらのデータはDVD−ROM22に記憶された地図データに基づいて、制御回路11により適宜生成される。ナビゲーション装置1は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0014】
ディスクドライブ21は、DVD−ROM22から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクの旅行時間(以下、リンク旅行時間)および標高の情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM22以外の他の記録メディア、たとえばCD−ROMやハードディスクなどから地図データを読み出してもよい。
【0015】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の道路地図などの各種情報を画面表示としてユーザに提供する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドを設定するための入力スイッチを有し、操作パネルやリモコンなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0016】
タッチパネル20は、表示モニタ16の表面に積層される透明のタッチスイッチであり、表示モニタ16に表示される画像はタッチパネル20を通して表示される。タッチパネル20は、タッチパネル20上の操作位置に応じた信号をタッチパネルコントロール部19に送出する。そして、タッチパネルコントロール部19はタッチパネル20の押圧位置を算出する。
【0017】
表示モニタ16の表示画面を押圧するとタッチパネル20が押圧される。そして、押圧した位置に目的地が設定されたり、押圧された各種ボタンや表示メニューに定義された処理が実行されたりする。
【0018】
データ記憶部23は不揮発性の記憶装置である。ナビゲーション装置1の電源断が行われても、データ記憶部23の記憶内容は維持される。データ記憶部23には、ナビゲーション装置1の各種設定やテーブルが記憶される。
【0019】
リアカメラ24は自車両の後方に設置されたカメラである。リアカメラ24は、所定の周期(例えば30分の1秒)で自車両の後方の様子を撮像し、制御回路11へ撮像した画像を表す信号(以下、撮像信号と呼ぶ)を出力する。制御回路11はこの画像をRAM13へ格納し、表示モニタ16への映像の表示や、後述するセンサの補正処理などに利用する。
【0020】
目的地がユーザにより設定されると、ナビゲーション装置1はGPSセンサ14cにより検出された現在位置を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。たとえば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。以下の説明では、このような経路演算を経路探索と呼ぶ。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。
【0021】
図2は、制御回路11の詳細な構成を示すブロック図である。図2に示す制御回路11内の各機能部は、制御回路11がROM12に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。
【0022】
白線検出部32は、リアカメラ24が出力する画像を解析し、画像から地物である白線を検出する。なお、リアカメラ24が出力する画像は、制御回路11により一旦RAM13へ格納されるが、図2ではこれを省略して図示している。回転検知部33は、リアカメラ24が2つの異なる時刻に出力した2つの画像のそれぞれにおける白線の検出結果に基づいて、2つの画像間における白線の回転量を検知する。移動検知部34は、リアカメラ24が2つの異なる時刻に出力した2つの画像のそれぞれにおける白線の検出結果に基づいて、2つの画像間における白線の移動量を検知する。
【0023】
演算部35は、回転検知部33および移動検知部34による検知結果に基づいて、後述するキャリブレーション情報を演算する。キャリブレーション部36は、振動ジャイロ14aおよび速度センサ14bのキャリブレーションと、RAM13に格納されている自車両の現在位置および方位の補正とを行う。
【0024】
演算部35が演算するキャリブレーション情報、ならびに、キャリブレーション部36が実行するキャリブレーション処理について詳述する。演算部35は、自車両の速度と角速度とを演算し、キャリブレーション情報としてキャリブレーション部36へ出力する。演算部35は、移動検知部34により検知された白線の移動量に基づいて自車両の速度を演算する。また、演算部35は、回転検知部33により検知された白線の回転量に基づいて自車両の角速度を演算する。
【0025】
キャリブレーション部36は、振動ジャイロ14aが出力する角速度信号と、演算部35が出力するキャリブレーション情報に含まれる角速度とを比較する。これら2つが一致しなかった場合、キャリブレーション部36は振動ジャイロ14aの出力が誤っていると見なし、振動ジャイロ14aのキャリブレーションを行う。具体的には、振動ジャイロ14aのバイアス(ゼロ位置)および感度を、振動ジャイロ14aから正しい角速度信号が出力されるよう調整する。
【0026】
キャリブレーション部36は更に、速度センサ14bが出力する速度信号と、演算部35が出力するキャリブレーション情報に含まれる速度とを比較する。これら2つが一致しなかった場合、キャリブレーション部36は速度センサ14bの出力が誤っていると見なし、速度センサ14bのキャリブレーションを行う。具体的には、速度センサ14bに設定されている1パルスあたりの速度を、速度センサ14bから正しい速度信号が出力されるよう調整する。
【0027】
演算部35が演算する補正情報、ならびに、キャリブレーション部36が実行する補正処理について詳述する。演算部35は、白線検出部32が検出した白線の情報と、キャリブレーション情報に含まれる自車両の速度と、を補正情報としてキャリブレーション部36へ出力する。キャリブレーション部36は、補正情報に含まれる白線の情報を、DVD−ROM22に記憶されている地図データから検索する。白線の情報が地図データに含まれている場合、キャリブレーション部36は地図データ中の白線情報と補正情報に含まれる白線情報とのマッチングを行う。キャリブレーション部36は、マッチングの結果から得られた自車両の方位を現時点における正しい方位であると見なし、RAM13に格納されている自車両の方位を補正する。例えば、RAM13に格納されている自車両の方位を単純に置き換えてもよいし、両者の平均を算出して新たな方位としてもよい。
【0028】
キャリブレーション部36は更に、補正情報に含まれる自車両の速度に基づいて、時刻t1からt2の間における自車両の移動距離を演算する。そして、移動距離が0ではなかった場合、時刻t1からt2の間における、速度センサ14bへの車速パルスの入力回数を調べる。移動距離が0ではないにも係わらず車速パルスが1回も入力されていなかった場合、自車両が実際に移動しているにも関わらず、速度センサ14bが自車両の速度を検知できなかったということである。これは、自車両がスリップにより移動したか、あるいは1パルス当たりの移動距離よりも短い距離を移動したか、のいずれかの原因によるものである。この場合、キャリブレーション部36は、上記の演算により求められた自車両の移動距離に基づいて、自車両の速度を演算する。そして、自車両が時刻t1からt2の間にこの速度で移動した場合の自車両の現在位置を演算し、RAM13に格納されている自車両の現在位置を補正する。例えば、RAM13に格納されている自車両の現在位置を単純に置き換えてもよいし、両者の平均を算出して新たな現在位置としてもよい。
【0029】
他方、時刻t1からt2の間に車速パルスの入力があった場合、上述の演算により得られた自車両の移動距離と、入力されたパルス数と、に基づき1パルス当たりの移動距離を算出する。そして、算出された1パルス当たりの移動距離を速度センサ14bに設定する。
【0030】
図3は、リアカメラ24による撮像の詳細を説明する図である。図3(a)に、自車両とその周辺を見下ろした平面図を示す。リアカメラ24は、自車両41が矢印Fで表す方向を向いているとき、範囲42を撮像するように設置される。このときのリアカメラ24による撮像結果を図3(b)に示す。白線検出部32は、リアカメラ24が撮像した画像43(図3(b))を解析し、画像43から白線L1,L2,L3を検出する。なお、白線検出部32が検出する白線は車線に限らない。例えば、駐車場の白線などであってもよい。
【0031】
リアカメラ24は所定周期(例えば30分の1秒)ごとに撮像を繰り返す。白線検出部32はリアカメラ24が画像を出力する度に、その画像から白線を検出する。回転検知部33は、リアカメラ24が2つの異なる時刻に出力した2つの撮像信号から、白線検出部32が検出した白線の回転量を検知する。例えば、リアカメラ24が30分の1秒ごとに撮像を繰り返す場合、回転検知部33は30分の1秒の間に白線がどれだけ回転したのかを検知する。
【0032】
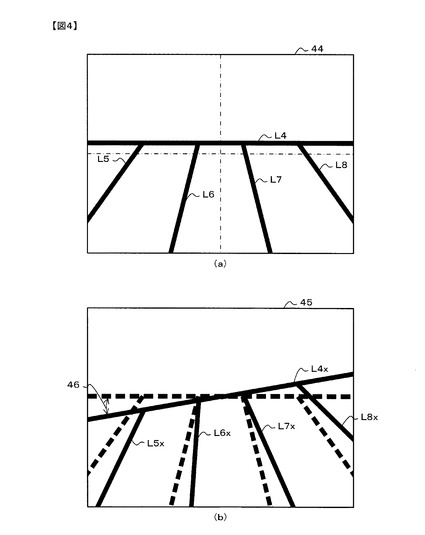
図4は、回転検知部33による回転検知処理を説明する図である。図4(a)に示す画像44は、ある時刻t1にリアカメラ24が出力した画像である。時刻t1の後に自車両の方位が変化した場合、時刻t1より後の時刻t2においてリアカメラ24が出力する画像は、図4(b)に示す画像45のようになる。
【0033】
白線検出部32は、図4(a)に示す画像44から5つの白線L4,L5,L6,L7,L8を検出する。回転検知部33は、検出された白線から画像の中央にもっとも近い白線を1つ選択する。図4(a)に示す画像44からは、白線L4が選択される。その後回転検知部33は、所定時間経過後の画像において、選択された白線が回転していることを検知する。図4(b)に示す時刻t2における画像45では、図4(a)で選択した白線L4が回転し異なる角度の白線L4xとなっていることが検知される。回転検知部33はこれら2つの白線L4、L4xの間の角度46すなわち回転量を算出し、演算部35へ出力する。
【0034】
移動検知部34は回転検知部33と同様に、リアカメラ24が2つの異なる時刻に出力した2つの画像から、白線検出部32が検出した白線の移動量を検知する。例えば、リアカメラ24が30分の1秒ごとに撮像を繰り返す場合、移動検知部34は30分の1秒の間に白線がどれだけ移動したのかを検知する。
【0035】
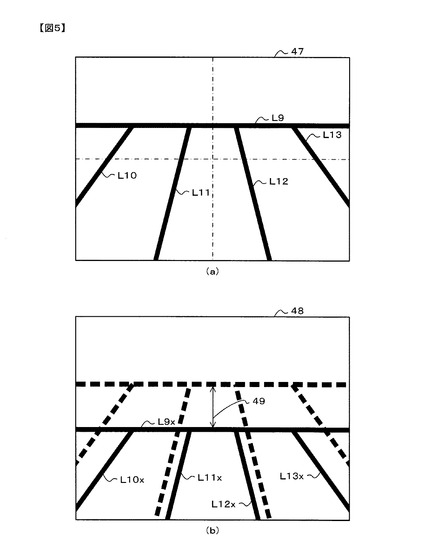
図5は、移動検知部34による移動検知処理を説明する図である。図5(a)に示す画像47は、ある時刻t1にリアカメラ24が出力した撮像信号である。時刻t1の後に自車両が移動した場合、時刻t1より後の時刻t2においてリアカメラ24が出力する画像は、図5(b)に示す画像48のようになる。
【0036】
白線検出部32は、図5(a)に示す画像47から5つの白線L9,L10,L11,L12,L13を検出する。移動検知部34は、検出された白線からもっとも水平に近い白線を1つ選択する。図5(a)に示す画像47からは、白線L9が選択される。なお同程度に水平な白線が複数存在する場合には、画面中央にもっとも近い白線が選択される。その後移動検知部34は、所定時間経過後の画像において、選択された白線が水平移動していることを検知する。図5(b)に示す時刻t2における画像48では、図5(a)で選択した白線L9が水平移動し異なる位置の白線L9xとなっていることが検知される。移動検知部34はこれら2つの白線L9,L9xの間の距離49すなわち移動量を算出し、演算部35へ出力する。
【0037】
なお本実施形態では、白線検出部32は画像の入力毎に白線検出を1度だけ実行する。回転検知部33と移動検知部34は共に同一の白線検出結果を用いて、上述の回転検知処理および移動検知処理を実行する。
【0038】
演算部35は、回転検知部33が出力した回転量に基づいて、時刻t1からt2の間における自車両の角速度を演算する。更に演算部35は、移動検知部34が出力した移動量に基づいて、時刻t1からt2の間における自車両の速度を演算する。そして、演算された角速度ならびに速度を、キャリブレーション情報としてキャリブレーション部36へ出力する。また、演算された速度と、白線検出部32が検出した白線の情報と、を補正情報としてキャリブレーション部36へ出力する。
【0039】
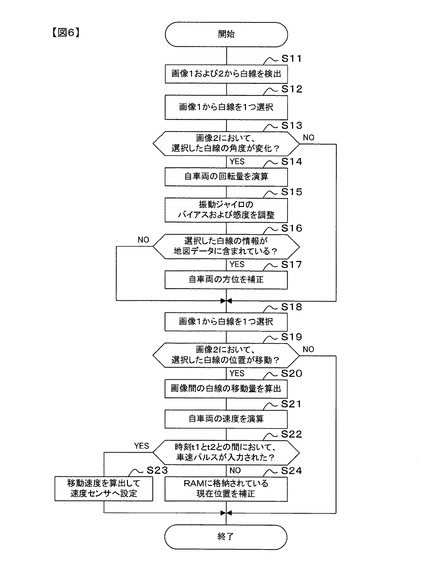
図6は、制御回路11によるキャリブレーション処理ならびに補正処理を示すフローチャートである。この処理は、制御回路11がROM12に格納された制御プログラムを実行することにより行われる。なお、図6に示す処理の開始時、時刻t1にリアカメラ24から出力された画像(以下、画像1と呼ぶ)と、時刻t2にリアカメラ24から出力された画像(以下、画像2と呼ぶ)と、がRAM13へ既に格納されているものとする。
【0040】
まずステップS11では、白線検出部32が画像1および画像2を解析し、白線を検出する。画像データを解析し白線を検知するアルゴリズムは公知の技術のうち所定のものを用いてよい。ステップS12では、回転検知部33が画像1において画像の中央にもっとも近い白線を1つ選択する。ステップS13では、回転検知部33がステップS12で選択された白線の角度が画像2において画像1から変化しているか否かを判定する。白線の角度が変化していなかった場合にはステップS18へ進む。他方、白線の角度が変化していた場合にはステップS14へ進む。
【0041】
ステップS14では、演算部35が白線の角度の変化量に基づいて、自車両の回転量を演算する。ステップS15では、キャリブレーション部36がステップS14で算出された回転量に基づいて、振動ジャイロ14aのバイアスおよび感度を調整する。ステップS16では、キャリブレーション部36が、DVD−ROM22に記憶されている地図データにステップS12で選択された白線の情報が含まれているか否かを判定する。白線の情報が地図データに含まれていた場合にはステップS17へ進む。ステップS17では、キャリブレーション部36がステップS12で選択した白線の地図データとのマッチングを行い、RAM13に格納されている自車両の方位を補正する。他方、地図データに白線の情報が含まれていなかった場合にはステップS18へ進む。
【0042】
ステップS18では、移動検知部34が画像1においてもっとも水平に近い白線を1つ選択する。ステップS19では、移動検知部34が、ステップS18で選択した白線が画像2において画像1内の位置から移動しているか否かを判定する。白線が移動していなかった場合には図6のフローチャートの処理を終了する。他方、白線が移動していた場合にはステップS20へ進む。
【0043】
ステップS20では、移動検知部34が、ステップS18で選択した白線の画像1と画像2との間における移動量を算出する。ステップS21では、演算部35が、ステップS20で算出された移動量に基づき、時刻t1とt2との間における自車両の速度を演算する。ステップS22では、キャリブレーション部36が、時刻t1とt2との間において速度センサ14bへ車速パルスが入力されたか否かを判定する。車速パルスが1つ以上入力されていた場合にはステップS23へ進む。ステップS23では、キャリブレーション部36がステップS21で算出された速度と速度センサ14bによりカウントされたパルス数とに基づき1パルス当たりの移動距離を算出し、速度センサ14bへ設定する。他方、時刻t1とt2との間において車速パルスが入力されていなかった場合にはステップS24へ進む。ステップS24では、キャリブレーション部36が、ステップS21で演算した速度に基づいてRAM13内の現在位置を補正する。
【0044】
上述した第1の実施の形態によるナビゲーション装置によれば、次の作用効果が得られる。
(1)キャリブレーション部36は、演算部35が演算したキャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行う。これにより、リアカメラ24からの映像を、地図情報と自車位置とのマップマッチング以外の用途に利用することができる。
【0045】
(2)キャリブレーション部36は、速度センサ14bに車速パルスが入力されない場合、演算部35が演算した補正情報に基づいて現在位置を補正する。これにより、低速で移動している場合など、車速パルスが得られない状況下であっても、正しい現在位置を得ることができる。
【0046】
(3)キャリブレーション部36は、可能であれば白線検出部32による検出結果と地図データとのマッチングを行い自車両の方位を補正する。これにより、振動ジャイロ14aの動作が不安定な場合であっても、自車両の方位を正しく保つことができる。
【0047】
上述した第1の実施の形態では、リアカメラ24が撮像した画像を用いてセンサの補正等を行っていた。以下に詳述する第2の実施の形態では、4つのカメラの撮像結果を合成した画像を用いてセンサの補正等を行う。
【0048】
(第2の実施の形態)
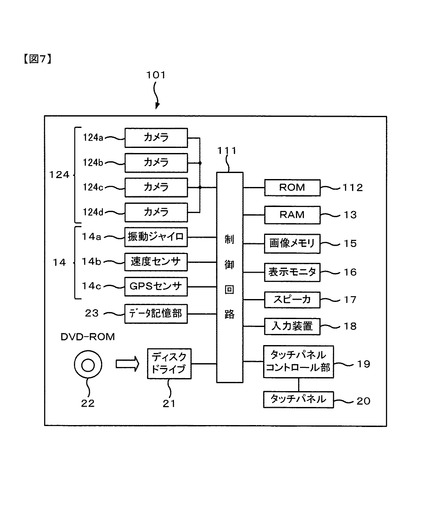
図7は、第2の実施の形態におけるナビゲーション装置101の全体構成を示すブロック図である。なお、図1に示す第1の実施の形態と同一の回路および装置には同一の符号を付し、説明を省略する。
【0049】
制御回路111には、カメラ124a,124b,124c,124dから成るカメラ群124が接続されている。これらのカメラはそれぞれ自車両の前方、自車両の右側、自車両の左側、自車両の後方を撮像し、制御回路111へ撮像信号を出力する。制御回路111は、これら4つのカメラからの撮像信号を、例えば特開2004−7299号公報に開示された手法により合成し、車両上空の視点から車両を見下ろす形の、車両周辺の全体を含む画像を作成する。そして、この作成された画像を解析することにより、センサの補正等を実行する。
【0050】
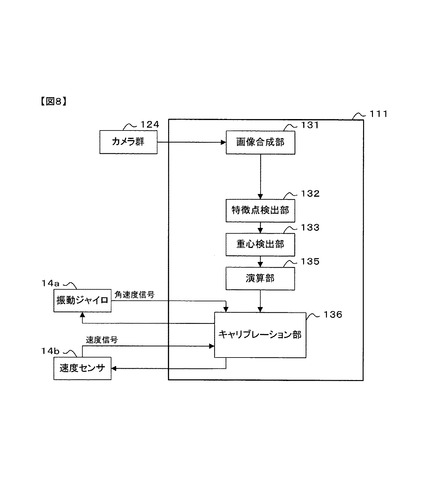
図8は、制御回路111の詳細な構成を示すブロック図である。図8に示す制御回路111内の各機能部は、制御回路111がROM112に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。
【0051】
画像合成部131は、カメラ群124の各カメラがそれぞれ出力した撮像信号に基づいて画像合成を行い、車両周辺の全体を含む画像を作成する。作成した画像はRAM13へ格納される。特徴点検出部132は、RAM13に格納されている画像を解析し、画像に含まれる特徴点(後に詳述)を検出する。重心検出部133は、画像に含まれる特徴点の重心位置を検出する。
【0052】
演算部135は、特徴点検出部132および重心検出部133による検出結果に基づいてキャリブレーション情報および補正情報を演算する。キャリブレーション部136は、演算部135が演算したキャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーション、ならびに、RAM13に格納されている自車両の現在位置および方位の補正を行う。
【0053】
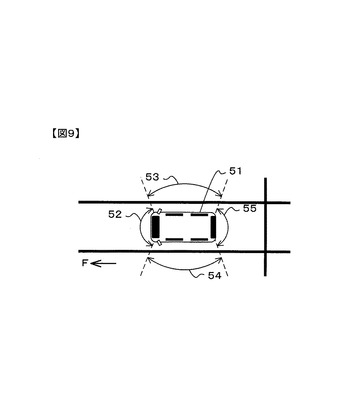
図9は、制御回路111に接続されたそれぞれのカメラの撮像範囲を示す図である。図9に示す自車両51の前方の範囲52をカメラ124aが、自車両51の右側の範囲53をカメラ124bが、自車両51の左側の範囲54をカメラ124cが、自車両51の後方の範囲55をカメラ124dがそれぞれ撮像する。画像合成部131はこれらのカメラにより出力される画像信号を合成することにより、図9に示す視点の画像を作成する。
【0054】
次に、制御回路111による画像の解析処理について説明する。制御回路111は第1の実施の形態における制御回路11と同様に、画像から検出した白線の回転量および移動量を検知することによりセンサのキャリブレーション等の処理を行う。ただし、制御回路111は、白線の回転と移動とが同時に起こった場合であっても、それぞれの検知を行うことが可能である。
【0055】
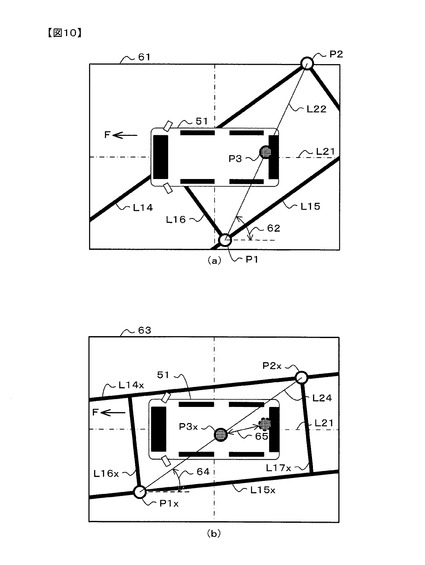
図10は、車両周辺の全体を含む画像を解析する処理を説明する平面図である。図10(a)に示す画像61はある時刻t1に画像合成部131により作成された画像を、図10(b)に示す画像63はt1より後の時刻t2において画像合成部131により作成された画像を、それぞれ表す。図10(b)には、図10(a)から自車両の位置および方位が変化したために、カメラ124a,124b,124c,124dによる撮像結果および画像合成部131による合成結果が変化している様子が示されている。
【0056】
画像合成部131は撮像信号が入力されると、4つの撮像信号を合成し1つの画像を作成する。特徴点検出部132は作成された画像から第1の実施の形態と同様に白線を検出すると共に、白線の検出結果に基づいて2つの特徴点を検出する。ここで特徴点とは、複数の白線の交点のことである。2つより多くの特徴点が検出された場合には、それらの特徴点の中から任意の2つを選択する。図10(a)では、2つの特徴点P1,P2が検出されている。
【0057】
重心検出部133は検出された2つの特徴点の重心位置を検出する。図10(a)では重心位置P3が検出される。これに加えて重心検出部133は、2つの特徴点を結んだ線分が所定の基準線に対して成す角度を算出する。本実施形態では、基準線は図10(a)に示す線分L21である。
【0058】
重心検出部133はその後、図10(b)に示す、時刻t2における画像63において、図10(a)で検出された2つの特徴点P1,P2が移動したことを検出する。すなわち、図10(b)において、特徴点P1xは図10(a)における特徴点P1に、特徴点P2xは図10(a)における特徴点P2にそれぞれ対応することを検出する。このとき重心検出部133は、図10(a)と同様にこれらの特徴点P1x,P2xの重心位置P3xを検出すると共に、これらの特徴点を結んだ線分L24が基準線L21に対して成す角度を算出する。
【0059】
重心検出部133は、時刻t1において線分L22が基準線L21に対して成す角度62と、時刻t2において線分L24が基準線L21に対して成す角度64とを比較する。この角度62と角度64との差が、第1の実施形態における白線の回転量に相当する。演算部135はこの角度の差に基づいて、第1の実施形態と同様に自車両の回転量を演算する。
【0060】
重心検出部133は更に、図10(b)に示す、時刻t2における画像63において、図10(a)で検出された2つの特徴点P1,P2の重心位置P3と、図10(b)で検出された2つの特徴点P1x,P2xの重心位置P3xとを比較する。この重心位置P3と重心位置P3xとの間の距離65が、第1の実施形態における白線の移動量に相当する。演算部135は距離56に基づいて、第1の実施形態と同様に自車両の移動量を演算する。演算部135は以上のようにして演算された自車両の回転量および移動量をキャリブレーション情報として、キャリブレーション部136へ出力する。
【0061】
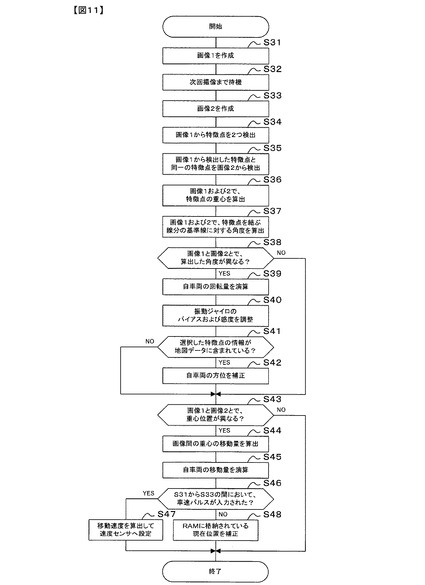
図11は、制御回路111による補正処理を示すフローチャートである。この処理は、制御回路111がROM112に格納された制御プログラムを実行することにより行われる。まずステップS31では、画像合成部131がカメラ124a,124b,124c,124dからそれぞれ出力される撮像信号を受信し、これらの撮像信号に基づく画像を合成してRAM13へ格納する。以下、この画像を画像1と呼ぶ。ステップS32では、制御回路111が、各カメラから新たな撮像信号が出力されるまで待機する。
【0062】
ステップS33では、画像合成部131がステップS31と同様にカメラ124a,124b,124c,124dからそれぞれ出力される撮像信号を受信し、これらの撮像信号に基づく画像を合成してRAM13へ格納する。以下、この画像を画像2と呼ぶ。ステップS34では、特徴点検出部132がRAM13に格納されている画像1を解析し、特徴点を2つ検出する。ステップS35では、特徴点検出部132がステップS34で検出した2つの特徴点と同一の特徴点を画像2から検出する。
【0063】
ステップS36では、重心検出部133が画像1と画像2のそれぞれについて特徴点の重心位置を算出する。ステップS37では、重心検出部133が画像1と画像2のそれぞれについて特徴点を結んだ線分が所定の基準線に対して成す角度を算出する。ステップS38では、重心検出部133が、画像1と画像2との間で、ステップS37で算出した角度が異なっているか否かを判定する。画像1と画像2との間でこれらの角度が異なっていない場合にはステップS43へ進む。他方、ステップS38において、画像1と画像2との間でステップS37で算出した角度が異なっていた場合にはステップS39へ進む。
【0064】
ステップS39では、演算部135がステップS37で算出した2つの角度の差に基づいて自車両の回転量を演算する。ステップS40では、キャリブレーション部136が、ステップS39で演算された回転量に基づいて振動ジャイロ14aのバイアスおよび感度を調整する。ステップS41では、キャリブレーション部136がDVD−ROM22に記憶されている地図データにステップS34で検出された特徴点の情報が含まれているか否かを判定する。特徴点の情報が地図データに含まれていた場合にはステップS42へ進み、キャリブレーション部136がステップS34で検出された特徴点のマッチングを行い、RAM13に格納されている自車両の方位を補正する。他方、地図データに特徴点の情報が含まれていなかった場合にはステップS43へ進む。
【0065】
ステップS43では、重心検出部135が、ステップS36で算出された画像1および画像2における重心位置がそれぞれ異なっているか否かを判定する。重心位置が同一の位置であった場合には図11のフローチャートの処理を終了する。他方、画像1と画像2とで重心位置が異なっていた場合にはステップS44へ進む。
【0066】
ステップS44では、重心検出部135が、ステップS36で算出された重心位置の画像1と画像2との間における移動量を算出する。ステップS45では、演算部135がステップS44で算出された移動量に基づきステップS31からステップS33の間における自車両の移動量を演算する。ステップ46では、キャリブレーション部136が、ステップS31からステップS33の間において速度センサ14bへ車速パルスが入力されたか否かを判定する。車速パルスが1つ以上入力されていた場合にはステップS47へ進み、キャリブレーション部136がステップS45で演算された移動量と速度センサ14bに入力されたパルス数とに基づき1パルス当たりの移動距離を算出し、速度センサ14bへ設定する。他方、ステップS31からステップS33の間において車速パルスが入力されていなかった場合にはステップS48へ進む。ステップS48では、キャリブレーション部136が、ステップS45で演算された速度に基づいてRAM13内の現在位置を補正する。
【0067】
上述した第2の実施の形態によるナビゲーション装置によれば、第1の実施の形態によるナビゲーション装置で得られる作用効果に加えて、次の作用効果が得られる。
(1)特徴点検出部132は、画像合成部131が合成した車両周辺の全体を含む画像を用いて特徴点の検出を行う。これにより、車両周辺のどこに存在する特徴点であっても検出することが可能となる。
【0068】
(2)演算部135は、特徴点検出部132が検出した特徴点、ならびに、重心検出部133が検出した重心位置に基づいて、移動および回転に関する演算を行う。これにより、車両の移動と回転が同時に発生した場合であっても、キャリブレーション部136によるキャリブレーションおよび補正が正しく実行される。
【0069】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
【0070】
(変形例1)
第2の実施形態において、特徴点を2つ検出し、これらの特徴点の重心位置を算出していたが、特徴点を3つ以上検出し、これらの特徴点の各組み合わせにおける重心位置を算出してもよい。例えば特徴点A,B,Cを検出し、特徴点A,Bの重心位置と、特徴点B,Cの重心位置と、特徴点A,Cの重心位置とを算出してもよい。このように3つ以上の特徴点を検出することにより、例えば車両の影になった等の理由により画像上から1つの特徴点が消えた場合であっても、キャリブレーションや補正を継続することが可能となる。
【0071】
(変形例2)
画像から白線が複数検出された場合、第1の実施形態で示した基準以外で白線を選択するようにしてもよい。例えば、もっとも幅が広い白線を選択するようにしてもよいし、予め定めた特定の領域に含まれる白線を選択するようにしてもよい。
【0072】
(変形例3)
第2の実施形態において、角度を計算するための基準線として、図8(a)に示した基準線L21以外を用いてもよい。例えば縦方向の垂直線を基準線としてもよいし、これらの基準線に対して傾いた線を基準線としてもよい。
【0073】
(変形例4)
第2の実施形態において、特徴点は白線の交点以外のものであってもよい。例えば道路標示や縁石など、画像から検出可能なものであればどのような地物であっても特徴点とすることが可能である。
【0074】
(変形例5)
第1の実施形態のようにリアカメラのみを用いる場合であっても、第2の実施形態と同様に特徴点を用いた解析を行ってもよい。これにより、リアカメラのみの環境下においても、移動と回転とが同時に発生する場合に対処することが可能となる。
【0075】
(変形例6)
第1の実施形態において、リアカメラ以外の撮像手段により解析を行ってもよい。例えばフロントカメラであってもよいし、第2の実施形態のように車両周辺の全体を含む画像を作成する複数のカメラであってもよい。もしくは、車両の側方に設置したカメラであってもよい。
【0076】
本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。
【符号の説明】
【0077】
1,101 ナビゲーション装置
11,111 制御回路
24 リアカメラ
124a,124b,124c,124d カメラ
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関する。
【背景技術】
【0002】
車両にカメラを搭載し、カメラが撮像した映像を利用して運転の支援を行う技術が知られている。例えば特許文献1には、車両に搭載された複数のカメラの出力を合成し、車両を見下ろす視点の画像を出力する車両用映像表示装置が記載されている。運転者はこの画像を見ることにより、車両周辺の状況を容易に把握することができる。
【0003】
他方、車両に搭載されたカメラの映像を運転者に提示するだけではなく、ナビゲーション装置の機能の補助に用いる技術が存在する。例えば特許文献2では、カメラの出力から車線を抽出しマップマッチング処理の精度を高めるカーナビゲーション装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−7299号公報
【特許文献2】特開平9−152348号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に開示されているカーナビゲーション装置は、カメラからの映像を、地図情報と自車位置とのマップマッチングにしか利用していなかった。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、自車両の周辺を撮像し撮像信号を出力する撮像手段と、自車両の走行状態を表す信号を出力するセンサと、撮像手段が出力する撮像信号に基づいてキャリブレーション情報を演算する演算手段と、キャリブレーション情報に基づいて、センサのキャリブレーションを行うキャリブレーション手段と、を備えることを特徴とするナビゲーション装置である。
請求項6に係る発明は、自車両の周辺を撮像し撮像信号を出力する撮像手段と、地図情報を記憶する第1の記憶手段と、自車両の現在位置および方位を記憶する第2の記憶手段と、撮像手段が出力する撮像信号に基づいて補正情報を演算する演算手段と、自車両の速度が所定速度以下である場合、補正情報に基づいて、第2の記憶手段が記憶する自車両の現在位置を補正する第1の補正手段と、補正情報と地図情報とに基づいて、第2の記憶手段が記憶する自車両の方位を補正する第2の補正手段とを備えることを特徴とするナビゲーション装置である。
【発明の効果】
【0007】
本発明によれば、カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能となる。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態におけるナビゲーション装置の全体構成を示すブロック図である。
【図2】制御回路11の詳細な構成を示すブロック図である。
【図3】リアカメラ24による撮像の詳細を説明する図である。
【図4】回転検知部33による回転検知処理を説明する図である。
【図5】移動検知部34による移動検知処理を説明する図である。
【図6】制御回路11によるキャリブレーション処理ならびに補正処理を示すフローチャートである。
【図7】第2の実施の形態におけるナビゲーション装置101の全体構成を示すブロック図である。
【図8】制御回路111の詳細な構成を示すブロック図である。
【図9】制御回路111に接続されたそれぞれのカメラの撮像範囲を示す図である。
【図10】車両周辺の全体を含む画像を解析する処理を説明する平面図である。
【図11】制御回路111による補正処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
(第1の実施の形態)
図1は、本実施形態におけるナビゲーション装置の全体構成を示すブロック図である。
【0010】
ナビゲーション装置1は、各部の制御を行う制御回路11を備えている。制御回路11には、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、タッチパネル20、ディスクドライブ21、データ記憶部23およびリアカメラ24がそれぞれ接続されている。タッチパネル20は、タッチパネルコントロール部19を介して制御回路11に接続されている。ディスクドライブ21には、地図データが記憶されたDVD−ROM22が装填されている。
【0011】
制御回路11は、マイクロプロセッサ及びその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。この制御回路11がDVD−ROM22に記憶された地図データに基づいて所定の経路探索処理を行うと、その処理結果が推奨経路として表示モニタ16に表示される。
【0012】
現在地検出装置14は自車両の現在位置および方位を検出する装置である。現在地検出装置14は、振動ジャイロ14a、速度センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは振動型のジャイロスコープ装置であり、自車両の角速度を検出して角速度信号を出力する。速度センサ14bは、自車両の速度を検出して速度信号を出力する。速度センサ14bには自車両から出力される車速パルス信号が入力される。速度センサ14bは、単位時間あたりのパルス数に1パルスあたりの速度を乗じることで自車両の速度を検出する。GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された自車両の現在位置および方位をRAM13に格納する。そして、RAM13に格納されたこれらのデータに基づいて、地図の表示範囲の決定、経路探索開始点の決定、地図上への現在位置の表示、などの処理を実行する。
【0013】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなる。これらのデータはDVD−ROM22に記憶された地図データに基づいて、制御回路11により適宜生成される。ナビゲーション装置1は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0014】
ディスクドライブ21は、DVD−ROM22から地図データを読み出す。地図データは、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクの旅行時間(以下、リンク旅行時間)および標高の情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。なお、DVD−ROM22以外の他の記録メディア、たとえばCD−ROMやハードディスクなどから地図データを読み出してもよい。
【0015】
表示モニタ16は、地図データなどの各種情報に基づいて、自車位置付近の道路地図などの各種情報を画面表示としてユーザに提供する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドを設定するための入力スイッチを有し、操作パネルやリモコンなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0016】
タッチパネル20は、表示モニタ16の表面に積層される透明のタッチスイッチであり、表示モニタ16に表示される画像はタッチパネル20を通して表示される。タッチパネル20は、タッチパネル20上の操作位置に応じた信号をタッチパネルコントロール部19に送出する。そして、タッチパネルコントロール部19はタッチパネル20の押圧位置を算出する。
【0017】
表示モニタ16の表示画面を押圧するとタッチパネル20が押圧される。そして、押圧した位置に目的地が設定されたり、押圧された各種ボタンや表示メニューに定義された処理が実行されたりする。
【0018】
データ記憶部23は不揮発性の記憶装置である。ナビゲーション装置1の電源断が行われても、データ記憶部23の記憶内容は維持される。データ記憶部23には、ナビゲーション装置1の各種設定やテーブルが記憶される。
【0019】
リアカメラ24は自車両の後方に設置されたカメラである。リアカメラ24は、所定の周期(例えば30分の1秒)で自車両の後方の様子を撮像し、制御回路11へ撮像した画像を表す信号(以下、撮像信号と呼ぶ)を出力する。制御回路11はこの画像をRAM13へ格納し、表示モニタ16への映像の表示や、後述するセンサの補正処理などに利用する。
【0020】
目的地がユーザにより設定されると、ナビゲーション装置1はGPSセンサ14cにより検出された現在位置を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。たとえば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。以下の説明では、このような経路演算を経路探索と呼ぶ。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、ほかの道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。
【0021】
図2は、制御回路11の詳細な構成を示すブロック図である。図2に示す制御回路11内の各機能部は、制御回路11がROM12に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。
【0022】
白線検出部32は、リアカメラ24が出力する画像を解析し、画像から地物である白線を検出する。なお、リアカメラ24が出力する画像は、制御回路11により一旦RAM13へ格納されるが、図2ではこれを省略して図示している。回転検知部33は、リアカメラ24が2つの異なる時刻に出力した2つの画像のそれぞれにおける白線の検出結果に基づいて、2つの画像間における白線の回転量を検知する。移動検知部34は、リアカメラ24が2つの異なる時刻に出力した2つの画像のそれぞれにおける白線の検出結果に基づいて、2つの画像間における白線の移動量を検知する。
【0023】
演算部35は、回転検知部33および移動検知部34による検知結果に基づいて、後述するキャリブレーション情報を演算する。キャリブレーション部36は、振動ジャイロ14aおよび速度センサ14bのキャリブレーションと、RAM13に格納されている自車両の現在位置および方位の補正とを行う。
【0024】
演算部35が演算するキャリブレーション情報、ならびに、キャリブレーション部36が実行するキャリブレーション処理について詳述する。演算部35は、自車両の速度と角速度とを演算し、キャリブレーション情報としてキャリブレーション部36へ出力する。演算部35は、移動検知部34により検知された白線の移動量に基づいて自車両の速度を演算する。また、演算部35は、回転検知部33により検知された白線の回転量に基づいて自車両の角速度を演算する。
【0025】
キャリブレーション部36は、振動ジャイロ14aが出力する角速度信号と、演算部35が出力するキャリブレーション情報に含まれる角速度とを比較する。これら2つが一致しなかった場合、キャリブレーション部36は振動ジャイロ14aの出力が誤っていると見なし、振動ジャイロ14aのキャリブレーションを行う。具体的には、振動ジャイロ14aのバイアス(ゼロ位置)および感度を、振動ジャイロ14aから正しい角速度信号が出力されるよう調整する。
【0026】
キャリブレーション部36は更に、速度センサ14bが出力する速度信号と、演算部35が出力するキャリブレーション情報に含まれる速度とを比較する。これら2つが一致しなかった場合、キャリブレーション部36は速度センサ14bの出力が誤っていると見なし、速度センサ14bのキャリブレーションを行う。具体的には、速度センサ14bに設定されている1パルスあたりの速度を、速度センサ14bから正しい速度信号が出力されるよう調整する。
【0027】
演算部35が演算する補正情報、ならびに、キャリブレーション部36が実行する補正処理について詳述する。演算部35は、白線検出部32が検出した白線の情報と、キャリブレーション情報に含まれる自車両の速度と、を補正情報としてキャリブレーション部36へ出力する。キャリブレーション部36は、補正情報に含まれる白線の情報を、DVD−ROM22に記憶されている地図データから検索する。白線の情報が地図データに含まれている場合、キャリブレーション部36は地図データ中の白線情報と補正情報に含まれる白線情報とのマッチングを行う。キャリブレーション部36は、マッチングの結果から得られた自車両の方位を現時点における正しい方位であると見なし、RAM13に格納されている自車両の方位を補正する。例えば、RAM13に格納されている自車両の方位を単純に置き換えてもよいし、両者の平均を算出して新たな方位としてもよい。
【0028】
キャリブレーション部36は更に、補正情報に含まれる自車両の速度に基づいて、時刻t1からt2の間における自車両の移動距離を演算する。そして、移動距離が0ではなかった場合、時刻t1からt2の間における、速度センサ14bへの車速パルスの入力回数を調べる。移動距離が0ではないにも係わらず車速パルスが1回も入力されていなかった場合、自車両が実際に移動しているにも関わらず、速度センサ14bが自車両の速度を検知できなかったということである。これは、自車両がスリップにより移動したか、あるいは1パルス当たりの移動距離よりも短い距離を移動したか、のいずれかの原因によるものである。この場合、キャリブレーション部36は、上記の演算により求められた自車両の移動距離に基づいて、自車両の速度を演算する。そして、自車両が時刻t1からt2の間にこの速度で移動した場合の自車両の現在位置を演算し、RAM13に格納されている自車両の現在位置を補正する。例えば、RAM13に格納されている自車両の現在位置を単純に置き換えてもよいし、両者の平均を算出して新たな現在位置としてもよい。
【0029】
他方、時刻t1からt2の間に車速パルスの入力があった場合、上述の演算により得られた自車両の移動距離と、入力されたパルス数と、に基づき1パルス当たりの移動距離を算出する。そして、算出された1パルス当たりの移動距離を速度センサ14bに設定する。
【0030】
図3は、リアカメラ24による撮像の詳細を説明する図である。図3(a)に、自車両とその周辺を見下ろした平面図を示す。リアカメラ24は、自車両41が矢印Fで表す方向を向いているとき、範囲42を撮像するように設置される。このときのリアカメラ24による撮像結果を図3(b)に示す。白線検出部32は、リアカメラ24が撮像した画像43(図3(b))を解析し、画像43から白線L1,L2,L3を検出する。なお、白線検出部32が検出する白線は車線に限らない。例えば、駐車場の白線などであってもよい。
【0031】
リアカメラ24は所定周期(例えば30分の1秒)ごとに撮像を繰り返す。白線検出部32はリアカメラ24が画像を出力する度に、その画像から白線を検出する。回転検知部33は、リアカメラ24が2つの異なる時刻に出力した2つの撮像信号から、白線検出部32が検出した白線の回転量を検知する。例えば、リアカメラ24が30分の1秒ごとに撮像を繰り返す場合、回転検知部33は30分の1秒の間に白線がどれだけ回転したのかを検知する。
【0032】
図4は、回転検知部33による回転検知処理を説明する図である。図4(a)に示す画像44は、ある時刻t1にリアカメラ24が出力した画像である。時刻t1の後に自車両の方位が変化した場合、時刻t1より後の時刻t2においてリアカメラ24が出力する画像は、図4(b)に示す画像45のようになる。
【0033】
白線検出部32は、図4(a)に示す画像44から5つの白線L4,L5,L6,L7,L8を検出する。回転検知部33は、検出された白線から画像の中央にもっとも近い白線を1つ選択する。図4(a)に示す画像44からは、白線L4が選択される。その後回転検知部33は、所定時間経過後の画像において、選択された白線が回転していることを検知する。図4(b)に示す時刻t2における画像45では、図4(a)で選択した白線L4が回転し異なる角度の白線L4xとなっていることが検知される。回転検知部33はこれら2つの白線L4、L4xの間の角度46すなわち回転量を算出し、演算部35へ出力する。
【0034】
移動検知部34は回転検知部33と同様に、リアカメラ24が2つの異なる時刻に出力した2つの画像から、白線検出部32が検出した白線の移動量を検知する。例えば、リアカメラ24が30分の1秒ごとに撮像を繰り返す場合、移動検知部34は30分の1秒の間に白線がどれだけ移動したのかを検知する。
【0035】
図5は、移動検知部34による移動検知処理を説明する図である。図5(a)に示す画像47は、ある時刻t1にリアカメラ24が出力した撮像信号である。時刻t1の後に自車両が移動した場合、時刻t1より後の時刻t2においてリアカメラ24が出力する画像は、図5(b)に示す画像48のようになる。
【0036】
白線検出部32は、図5(a)に示す画像47から5つの白線L9,L10,L11,L12,L13を検出する。移動検知部34は、検出された白線からもっとも水平に近い白線を1つ選択する。図5(a)に示す画像47からは、白線L9が選択される。なお同程度に水平な白線が複数存在する場合には、画面中央にもっとも近い白線が選択される。その後移動検知部34は、所定時間経過後の画像において、選択された白線が水平移動していることを検知する。図5(b)に示す時刻t2における画像48では、図5(a)で選択した白線L9が水平移動し異なる位置の白線L9xとなっていることが検知される。移動検知部34はこれら2つの白線L9,L9xの間の距離49すなわち移動量を算出し、演算部35へ出力する。
【0037】
なお本実施形態では、白線検出部32は画像の入力毎に白線検出を1度だけ実行する。回転検知部33と移動検知部34は共に同一の白線検出結果を用いて、上述の回転検知処理および移動検知処理を実行する。
【0038】
演算部35は、回転検知部33が出力した回転量に基づいて、時刻t1からt2の間における自車両の角速度を演算する。更に演算部35は、移動検知部34が出力した移動量に基づいて、時刻t1からt2の間における自車両の速度を演算する。そして、演算された角速度ならびに速度を、キャリブレーション情報としてキャリブレーション部36へ出力する。また、演算された速度と、白線検出部32が検出した白線の情報と、を補正情報としてキャリブレーション部36へ出力する。
【0039】
図6は、制御回路11によるキャリブレーション処理ならびに補正処理を示すフローチャートである。この処理は、制御回路11がROM12に格納された制御プログラムを実行することにより行われる。なお、図6に示す処理の開始時、時刻t1にリアカメラ24から出力された画像(以下、画像1と呼ぶ)と、時刻t2にリアカメラ24から出力された画像(以下、画像2と呼ぶ)と、がRAM13へ既に格納されているものとする。
【0040】
まずステップS11では、白線検出部32が画像1および画像2を解析し、白線を検出する。画像データを解析し白線を検知するアルゴリズムは公知の技術のうち所定のものを用いてよい。ステップS12では、回転検知部33が画像1において画像の中央にもっとも近い白線を1つ選択する。ステップS13では、回転検知部33がステップS12で選択された白線の角度が画像2において画像1から変化しているか否かを判定する。白線の角度が変化していなかった場合にはステップS18へ進む。他方、白線の角度が変化していた場合にはステップS14へ進む。
【0041】
ステップS14では、演算部35が白線の角度の変化量に基づいて、自車両の回転量を演算する。ステップS15では、キャリブレーション部36がステップS14で算出された回転量に基づいて、振動ジャイロ14aのバイアスおよび感度を調整する。ステップS16では、キャリブレーション部36が、DVD−ROM22に記憶されている地図データにステップS12で選択された白線の情報が含まれているか否かを判定する。白線の情報が地図データに含まれていた場合にはステップS17へ進む。ステップS17では、キャリブレーション部36がステップS12で選択した白線の地図データとのマッチングを行い、RAM13に格納されている自車両の方位を補正する。他方、地図データに白線の情報が含まれていなかった場合にはステップS18へ進む。
【0042】
ステップS18では、移動検知部34が画像1においてもっとも水平に近い白線を1つ選択する。ステップS19では、移動検知部34が、ステップS18で選択した白線が画像2において画像1内の位置から移動しているか否かを判定する。白線が移動していなかった場合には図6のフローチャートの処理を終了する。他方、白線が移動していた場合にはステップS20へ進む。
【0043】
ステップS20では、移動検知部34が、ステップS18で選択した白線の画像1と画像2との間における移動量を算出する。ステップS21では、演算部35が、ステップS20で算出された移動量に基づき、時刻t1とt2との間における自車両の速度を演算する。ステップS22では、キャリブレーション部36が、時刻t1とt2との間において速度センサ14bへ車速パルスが入力されたか否かを判定する。車速パルスが1つ以上入力されていた場合にはステップS23へ進む。ステップS23では、キャリブレーション部36がステップS21で算出された速度と速度センサ14bによりカウントされたパルス数とに基づき1パルス当たりの移動距離を算出し、速度センサ14bへ設定する。他方、時刻t1とt2との間において車速パルスが入力されていなかった場合にはステップS24へ進む。ステップS24では、キャリブレーション部36が、ステップS21で演算した速度に基づいてRAM13内の現在位置を補正する。
【0044】
上述した第1の実施の形態によるナビゲーション装置によれば、次の作用効果が得られる。
(1)キャリブレーション部36は、演算部35が演算したキャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行う。これにより、リアカメラ24からの映像を、地図情報と自車位置とのマップマッチング以外の用途に利用することができる。
【0045】
(2)キャリブレーション部36は、速度センサ14bに車速パルスが入力されない場合、演算部35が演算した補正情報に基づいて現在位置を補正する。これにより、低速で移動している場合など、車速パルスが得られない状況下であっても、正しい現在位置を得ることができる。
【0046】
(3)キャリブレーション部36は、可能であれば白線検出部32による検出結果と地図データとのマッチングを行い自車両の方位を補正する。これにより、振動ジャイロ14aの動作が不安定な場合であっても、自車両の方位を正しく保つことができる。
【0047】
上述した第1の実施の形態では、リアカメラ24が撮像した画像を用いてセンサの補正等を行っていた。以下に詳述する第2の実施の形態では、4つのカメラの撮像結果を合成した画像を用いてセンサの補正等を行う。
【0048】
(第2の実施の形態)
図7は、第2の実施の形態におけるナビゲーション装置101の全体構成を示すブロック図である。なお、図1に示す第1の実施の形態と同一の回路および装置には同一の符号を付し、説明を省略する。
【0049】
制御回路111には、カメラ124a,124b,124c,124dから成るカメラ群124が接続されている。これらのカメラはそれぞれ自車両の前方、自車両の右側、自車両の左側、自車両の後方を撮像し、制御回路111へ撮像信号を出力する。制御回路111は、これら4つのカメラからの撮像信号を、例えば特開2004−7299号公報に開示された手法により合成し、車両上空の視点から車両を見下ろす形の、車両周辺の全体を含む画像を作成する。そして、この作成された画像を解析することにより、センサの補正等を実行する。
【0050】
図8は、制御回路111の詳細な構成を示すブロック図である。図8に示す制御回路111内の各機能部は、制御回路111がROM112に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。
【0051】
画像合成部131は、カメラ群124の各カメラがそれぞれ出力した撮像信号に基づいて画像合成を行い、車両周辺の全体を含む画像を作成する。作成した画像はRAM13へ格納される。特徴点検出部132は、RAM13に格納されている画像を解析し、画像に含まれる特徴点(後に詳述)を検出する。重心検出部133は、画像に含まれる特徴点の重心位置を検出する。
【0052】
演算部135は、特徴点検出部132および重心検出部133による検出結果に基づいてキャリブレーション情報および補正情報を演算する。キャリブレーション部136は、演算部135が演算したキャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーション、ならびに、RAM13に格納されている自車両の現在位置および方位の補正を行う。
【0053】
図9は、制御回路111に接続されたそれぞれのカメラの撮像範囲を示す図である。図9に示す自車両51の前方の範囲52をカメラ124aが、自車両51の右側の範囲53をカメラ124bが、自車両51の左側の範囲54をカメラ124cが、自車両51の後方の範囲55をカメラ124dがそれぞれ撮像する。画像合成部131はこれらのカメラにより出力される画像信号を合成することにより、図9に示す視点の画像を作成する。
【0054】
次に、制御回路111による画像の解析処理について説明する。制御回路111は第1の実施の形態における制御回路11と同様に、画像から検出した白線の回転量および移動量を検知することによりセンサのキャリブレーション等の処理を行う。ただし、制御回路111は、白線の回転と移動とが同時に起こった場合であっても、それぞれの検知を行うことが可能である。
【0055】
図10は、車両周辺の全体を含む画像を解析する処理を説明する平面図である。図10(a)に示す画像61はある時刻t1に画像合成部131により作成された画像を、図10(b)に示す画像63はt1より後の時刻t2において画像合成部131により作成された画像を、それぞれ表す。図10(b)には、図10(a)から自車両の位置および方位が変化したために、カメラ124a,124b,124c,124dによる撮像結果および画像合成部131による合成結果が変化している様子が示されている。
【0056】
画像合成部131は撮像信号が入力されると、4つの撮像信号を合成し1つの画像を作成する。特徴点検出部132は作成された画像から第1の実施の形態と同様に白線を検出すると共に、白線の検出結果に基づいて2つの特徴点を検出する。ここで特徴点とは、複数の白線の交点のことである。2つより多くの特徴点が検出された場合には、それらの特徴点の中から任意の2つを選択する。図10(a)では、2つの特徴点P1,P2が検出されている。
【0057】
重心検出部133は検出された2つの特徴点の重心位置を検出する。図10(a)では重心位置P3が検出される。これに加えて重心検出部133は、2つの特徴点を結んだ線分が所定の基準線に対して成す角度を算出する。本実施形態では、基準線は図10(a)に示す線分L21である。
【0058】
重心検出部133はその後、図10(b)に示す、時刻t2における画像63において、図10(a)で検出された2つの特徴点P1,P2が移動したことを検出する。すなわち、図10(b)において、特徴点P1xは図10(a)における特徴点P1に、特徴点P2xは図10(a)における特徴点P2にそれぞれ対応することを検出する。このとき重心検出部133は、図10(a)と同様にこれらの特徴点P1x,P2xの重心位置P3xを検出すると共に、これらの特徴点を結んだ線分L24が基準線L21に対して成す角度を算出する。
【0059】
重心検出部133は、時刻t1において線分L22が基準線L21に対して成す角度62と、時刻t2において線分L24が基準線L21に対して成す角度64とを比較する。この角度62と角度64との差が、第1の実施形態における白線の回転量に相当する。演算部135はこの角度の差に基づいて、第1の実施形態と同様に自車両の回転量を演算する。
【0060】
重心検出部133は更に、図10(b)に示す、時刻t2における画像63において、図10(a)で検出された2つの特徴点P1,P2の重心位置P3と、図10(b)で検出された2つの特徴点P1x,P2xの重心位置P3xとを比較する。この重心位置P3と重心位置P3xとの間の距離65が、第1の実施形態における白線の移動量に相当する。演算部135は距離56に基づいて、第1の実施形態と同様に自車両の移動量を演算する。演算部135は以上のようにして演算された自車両の回転量および移動量をキャリブレーション情報として、キャリブレーション部136へ出力する。
【0061】
図11は、制御回路111による補正処理を示すフローチャートである。この処理は、制御回路111がROM112に格納された制御プログラムを実行することにより行われる。まずステップS31では、画像合成部131がカメラ124a,124b,124c,124dからそれぞれ出力される撮像信号を受信し、これらの撮像信号に基づく画像を合成してRAM13へ格納する。以下、この画像を画像1と呼ぶ。ステップS32では、制御回路111が、各カメラから新たな撮像信号が出力されるまで待機する。
【0062】
ステップS33では、画像合成部131がステップS31と同様にカメラ124a,124b,124c,124dからそれぞれ出力される撮像信号を受信し、これらの撮像信号に基づく画像を合成してRAM13へ格納する。以下、この画像を画像2と呼ぶ。ステップS34では、特徴点検出部132がRAM13に格納されている画像1を解析し、特徴点を2つ検出する。ステップS35では、特徴点検出部132がステップS34で検出した2つの特徴点と同一の特徴点を画像2から検出する。
【0063】
ステップS36では、重心検出部133が画像1と画像2のそれぞれについて特徴点の重心位置を算出する。ステップS37では、重心検出部133が画像1と画像2のそれぞれについて特徴点を結んだ線分が所定の基準線に対して成す角度を算出する。ステップS38では、重心検出部133が、画像1と画像2との間で、ステップS37で算出した角度が異なっているか否かを判定する。画像1と画像2との間でこれらの角度が異なっていない場合にはステップS43へ進む。他方、ステップS38において、画像1と画像2との間でステップS37で算出した角度が異なっていた場合にはステップS39へ進む。
【0064】
ステップS39では、演算部135がステップS37で算出した2つの角度の差に基づいて自車両の回転量を演算する。ステップS40では、キャリブレーション部136が、ステップS39で演算された回転量に基づいて振動ジャイロ14aのバイアスおよび感度を調整する。ステップS41では、キャリブレーション部136がDVD−ROM22に記憶されている地図データにステップS34で検出された特徴点の情報が含まれているか否かを判定する。特徴点の情報が地図データに含まれていた場合にはステップS42へ進み、キャリブレーション部136がステップS34で検出された特徴点のマッチングを行い、RAM13に格納されている自車両の方位を補正する。他方、地図データに特徴点の情報が含まれていなかった場合にはステップS43へ進む。
【0065】
ステップS43では、重心検出部135が、ステップS36で算出された画像1および画像2における重心位置がそれぞれ異なっているか否かを判定する。重心位置が同一の位置であった場合には図11のフローチャートの処理を終了する。他方、画像1と画像2とで重心位置が異なっていた場合にはステップS44へ進む。
【0066】
ステップS44では、重心検出部135が、ステップS36で算出された重心位置の画像1と画像2との間における移動量を算出する。ステップS45では、演算部135がステップS44で算出された移動量に基づきステップS31からステップS33の間における自車両の移動量を演算する。ステップ46では、キャリブレーション部136が、ステップS31からステップS33の間において速度センサ14bへ車速パルスが入力されたか否かを判定する。車速パルスが1つ以上入力されていた場合にはステップS47へ進み、キャリブレーション部136がステップS45で演算された移動量と速度センサ14bに入力されたパルス数とに基づき1パルス当たりの移動距離を算出し、速度センサ14bへ設定する。他方、ステップS31からステップS33の間において車速パルスが入力されていなかった場合にはステップS48へ進む。ステップS48では、キャリブレーション部136が、ステップS45で演算された速度に基づいてRAM13内の現在位置を補正する。
【0067】
上述した第2の実施の形態によるナビゲーション装置によれば、第1の実施の形態によるナビゲーション装置で得られる作用効果に加えて、次の作用効果が得られる。
(1)特徴点検出部132は、画像合成部131が合成した車両周辺の全体を含む画像を用いて特徴点の検出を行う。これにより、車両周辺のどこに存在する特徴点であっても検出することが可能となる。
【0068】
(2)演算部135は、特徴点検出部132が検出した特徴点、ならびに、重心検出部133が検出した重心位置に基づいて、移動および回転に関する演算を行う。これにより、車両の移動と回転が同時に発生した場合であっても、キャリブレーション部136によるキャリブレーションおよび補正が正しく実行される。
【0069】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
【0070】
(変形例1)
第2の実施形態において、特徴点を2つ検出し、これらの特徴点の重心位置を算出していたが、特徴点を3つ以上検出し、これらの特徴点の各組み合わせにおける重心位置を算出してもよい。例えば特徴点A,B,Cを検出し、特徴点A,Bの重心位置と、特徴点B,Cの重心位置と、特徴点A,Cの重心位置とを算出してもよい。このように3つ以上の特徴点を検出することにより、例えば車両の影になった等の理由により画像上から1つの特徴点が消えた場合であっても、キャリブレーションや補正を継続することが可能となる。
【0071】
(変形例2)
画像から白線が複数検出された場合、第1の実施形態で示した基準以外で白線を選択するようにしてもよい。例えば、もっとも幅が広い白線を選択するようにしてもよいし、予め定めた特定の領域に含まれる白線を選択するようにしてもよい。
【0072】
(変形例3)
第2の実施形態において、角度を計算するための基準線として、図8(a)に示した基準線L21以外を用いてもよい。例えば縦方向の垂直線を基準線としてもよいし、これらの基準線に対して傾いた線を基準線としてもよい。
【0073】
(変形例4)
第2の実施形態において、特徴点は白線の交点以外のものであってもよい。例えば道路標示や縁石など、画像から検出可能なものであればどのような地物であっても特徴点とすることが可能である。
【0074】
(変形例5)
第1の実施形態のようにリアカメラのみを用いる場合であっても、第2の実施形態と同様に特徴点を用いた解析を行ってもよい。これにより、リアカメラのみの環境下においても、移動と回転とが同時に発生する場合に対処することが可能となる。
【0075】
(変形例6)
第1の実施形態において、リアカメラ以外の撮像手段により解析を行ってもよい。例えばフロントカメラであってもよいし、第2の実施形態のように車両周辺の全体を含む画像を作成する複数のカメラであってもよい。もしくは、車両の側方に設置したカメラであってもよい。
【0076】
本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。
【符号の説明】
【0077】
1,101 ナビゲーション装置
11,111 制御回路
24 リアカメラ
124a,124b,124c,124d カメラ
【特許請求の範囲】
【請求項1】
自車両の周辺を撮像し撮像信号を出力する撮像手段と、
自車両の走行状態を表す信号を出力するセンサと、
前記撮像手段が出力する撮像信号に基づいてキャリブレーション情報を演算する演算手段と、
前記キャリブレーション情報に基づいて、前記センサのキャリブレーションを行うキャリブレーション手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記撮像信号から地物を検出する地物検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検出手段が検出した地物の前記2つの撮像信号間における回転量を検知する回転検知手段と、
前記撮像信号が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検知手段が検出した地物の前記2つの撮像信号間における移動量および移動方向を検知する移動検知手段とを更に備え、
前記演算手段は、前記回転量と前記移動量と前記移動方向とに基づいて前記キャリブレーション情報を演算することを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置において、
前記撮像信号から複数の特徴点を検出する特徴点検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、複数の特徴点のうちいずれか2つの特徴点の重心の、前記2つの撮像信号間における移動量および移動方向を検出する重心検出手段とを更に備え、
前記演算手段は、前記移動量と前記移動方向とに基づいて前記キャリブレーション情報を演算することを特徴とするナビゲーション装置。
【請求項4】
請求項1〜3のいずれか一項に記載のナビゲーション装置において、
前記センサは自車両の角速度を表す角速度信号を出力する角速度センサであることを特徴とするナビゲーション装置。
【請求項5】
請求項1〜3のいずれか一項に記載のナビゲーション装置において、
前記センサは自車両の速度を表す速度信号を出力する速度センサであることを特徴とするナビゲーション装置。
【請求項6】
自車両の周辺を撮像し撮像信号を出力する撮像手段と、
地図情報を記憶する第1の記憶手段と、
自車両の現在位置および方位を記憶する第2の記憶手段と、
前記撮像手段が出力する撮像信号に基づいて補正情報を演算する演算手段と、
自車両の速度が所定速度以下である場合、前記補正情報に基づいて、前記第2の記憶手段が記憶する自車両の現在位置を補正する第1の補正手段と、
前記補正情報と前記地図情報とに基づいて、前記第2の記憶手段が記憶する自車両の方位を補正する第2の補正手段と
を備えることを特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置において、
前記撮像信号から地物を検出する地物検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検出手段が検出した地物の前記2つの撮像信号間における回転量を検知する回転検知手段と、
前記撮像信号が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検知手段が検出した地物の前記2つの撮像信号間における移動量を検知する移動検知手段と、を更に備え、
前記演算手段は、前記回転量と前記移動量とに基づいて前記補正情報を演算することを特徴とするナビゲーション装置。
【請求項8】
請求項6に記載のナビゲーション装置において、
前記撮像信号から複数の特徴点を検出する特徴点検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、複数の特徴点のうちいずれか2つの特徴点の重心の、前記2つの撮像信号間における移動量および移動方向を検出する重心検出手段と、を更に備え、
前記演算手段は、前記重心検出手段が検出した重心の移動量および移動方向に基づいて前記補正情報を演算することを特徴とするナビゲーション装置。
【請求項1】
自車両の周辺を撮像し撮像信号を出力する撮像手段と、
自車両の走行状態を表す信号を出力するセンサと、
前記撮像手段が出力する撮像信号に基づいてキャリブレーション情報を演算する演算手段と、
前記キャリブレーション情報に基づいて、前記センサのキャリブレーションを行うキャリブレーション手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記撮像信号から地物を検出する地物検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検出手段が検出した地物の前記2つの撮像信号間における回転量を検知する回転検知手段と、
前記撮像信号が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検知手段が検出した地物の前記2つの撮像信号間における移動量および移動方向を検知する移動検知手段とを更に備え、
前記演算手段は、前記回転量と前記移動量と前記移動方向とに基づいて前記キャリブレーション情報を演算することを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置において、
前記撮像信号から複数の特徴点を検出する特徴点検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、複数の特徴点のうちいずれか2つの特徴点の重心の、前記2つの撮像信号間における移動量および移動方向を検出する重心検出手段とを更に備え、
前記演算手段は、前記移動量と前記移動方向とに基づいて前記キャリブレーション情報を演算することを特徴とするナビゲーション装置。
【請求項4】
請求項1〜3のいずれか一項に記載のナビゲーション装置において、
前記センサは自車両の角速度を表す角速度信号を出力する角速度センサであることを特徴とするナビゲーション装置。
【請求項5】
請求項1〜3のいずれか一項に記載のナビゲーション装置において、
前記センサは自車両の速度を表す速度信号を出力する速度センサであることを特徴とするナビゲーション装置。
【請求項6】
自車両の周辺を撮像し撮像信号を出力する撮像手段と、
地図情報を記憶する第1の記憶手段と、
自車両の現在位置および方位を記憶する第2の記憶手段と、
前記撮像手段が出力する撮像信号に基づいて補正情報を演算する演算手段と、
自車両の速度が所定速度以下である場合、前記補正情報に基づいて、前記第2の記憶手段が記憶する自車両の現在位置を補正する第1の補正手段と、
前記補正情報と前記地図情報とに基づいて、前記第2の記憶手段が記憶する自車両の方位を補正する第2の補正手段と
を備えることを特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置において、
前記撮像信号から地物を検出する地物検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検出手段が検出した地物の前記2つの撮像信号間における回転量を検知する回転検知手段と、
前記撮像信号が2つの異なる時刻に出力した2つの撮像信号に基づいて、前記地物検知手段が検出した地物の前記2つの撮像信号間における移動量を検知する移動検知手段と、を更に備え、
前記演算手段は、前記回転量と前記移動量とに基づいて前記補正情報を演算することを特徴とするナビゲーション装置。
【請求項8】
請求項6に記載のナビゲーション装置において、
前記撮像信号から複数の特徴点を検出する特徴点検出手段と、
前記撮像手段が2つの異なる時刻に出力した2つの撮像信号に基づいて、複数の特徴点のうちいずれか2つの特徴点の重心の、前記2つの撮像信号間における移動量および移動方向を検出する重心検出手段と、を更に備え、
前記演算手段は、前記重心検出手段が検出した重心の移動量および移動方向に基づいて前記補正情報を演算することを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−232168(P2011−232168A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−102622(P2010−102622)
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]