
ナビゲーション装置
【課題】自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実現する。
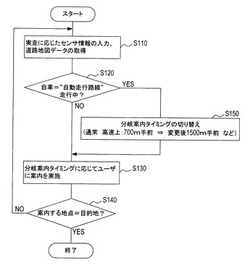
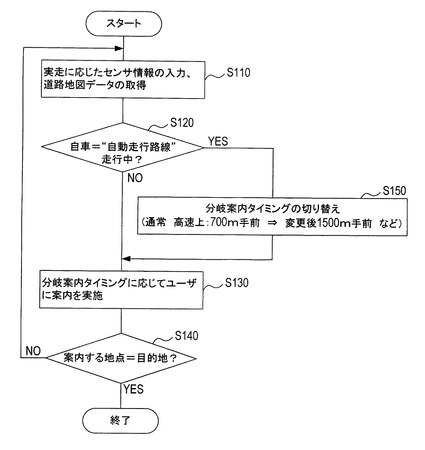
【解決手段】自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で実行するが、変更後は高速道路上の1500m手前で実行するといった具合である。一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断する。そして、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する(S130)。
【解決手段】自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で実行するが、変更後は高速道路上の1500m手前で実行するといった具合である。一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断する。そして、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する(S130)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ユーザに指定された条件に従って現在地から目的地までの適切な経路を探索し、探索された経路を設定するとともに経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をモニタ上に道路地図と共に表示したり、ユーザに指定された条件に従って現在地から目的地までの適切な経路を探索し、探索された経路を設定するとともに経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
ところで、近年、ドライバが車両の運転を行わずに、当該車両に付随する補助装置によって自動で当該車両を運行可能な路線(以下自動走行路線)が研究されている。
例えば、特許文献1には、車両の走行経路上に配列された磁気ネイルにより、所定間隔毎に、所定の磁気配列を有する距離マークを設けておき、スタート地点からの走行中、車輪の回転数に基づき車両の走行距離を算出し、その走行距離を距離マークを検出する毎に、距離マークの検出回数と距離マークの間隔との積により表される距離に訂正し、訂正した走行距離に基づいて車両の走行位置を検知する点が記載されている。なお、上述の磁気ネイルが配列された車両の走行経路が自動走行路線として機能する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平09−184738号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のような自動走行路線を自動運転中に、自動運転から手動運転への切替を行う場合には、この切替が安全に行われることが好ましい。
本発明は、このような課題に鑑みなされたものであり、その目的とするところは、自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実行可能なナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するためになされた請求項1に係るナビゲーション装置によれば、道路地図情報取得手段が、道路地図情報を取得可能であり、経路計算手段が、現在位置特定手段によって特定された現在位置から目的地設定手段によって設定された目的地へ至る経路を、道路地図情報取得手段によって取得された道路地図情報を参照して計算する。なお、道路地図情報には、分岐点や交差点など進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含まれる。そして、経路案内手段が、経路計算手段によって計算された経路を案内する経路案内を実行する。なお、上述の経路案内手段は、経路案内として経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能である。
【0007】
そして、判断手段が経路上の自動走行路線を走行中であることを判断し、判断手段によって自動走行路線を走行中であると判断された場合には、設定手段が、経路案内手段による進行路選択地点案内を実行するタイミングを早める。
【0008】
このように、自動走行路線を走行中であると判断された場合に進行路選択地点案内を実行するタイミングを早めることにより、自動走行路線を自動運転中に自動運転から手動運転への切替を行う際に、より安全なナビゲーションを実現することができる。
【0009】
この場合、上述の経路案内手段による進行路選択地点案内を実行するタイミングを、少なくとも当該ナビゲーション装置が搭載される車両を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めることが考えられる(請求項2)。
【0010】
このようにすれば、更により安全なナビゲーションを実現することができる。
また、現在位置から進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、経路案内手段による進行路選択地点案内を実行するようにしてもよい(請求項3)。
【0011】
このようにしても、より安全なナビゲーションを実現することができる。
なお、所定値については、ユーザによる指示に従って変更可能にすることが考えられる(請求項4)。このようにすれば、ユーザの利便性を高めることができ、より安全なナビゲーションの実現に寄与することができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態のナビゲーションシステム1の概略構成図
【図2】案内タイミング変更処理を表すフローチャート
【発明を実施するための形態】
【0013】
以下に本発明の実施形態を図面とともに説明する。
[1.ナビゲーションシステム1の構成の説明]
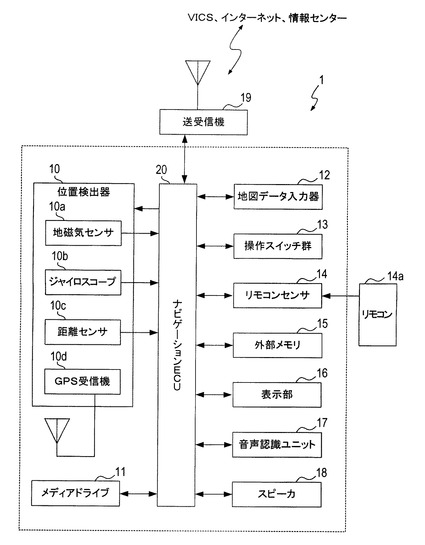
図1において、ナビゲーションシステム1は、位置検出器10と、メディアドライブ11と、地図データ入力器12と、操作スイッチ群13と、リモコンセンサ14と、リモートコントロール端末(以下リモコンと称する)14aと、外部メモリ15と、表示部16と、音声認識ユニット17と、スピーカ18と、送受信機19と、これら各装置と接続されてその各装置を制御するナビゲーションECU(ECU:電子制御装置)20とを備えている。
【0014】
ナビゲーションECU20は、通常のコンピュータとして構成されており、内部にはCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(何れも図示省略)が備えられている。
【0015】
ナビゲーションECU20は、位置検出器10、地図データ入力器12、操作スイッチ群13、リモコンセンサ14、外部メモリ15、音声認識ユニット17、送受信機19等から入力された各種情報に基づき、所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。なお、これらの各処理については公知技術に従うので、ここではその詳細な説明は省略する。
【0016】
位置検出器10は、いずれも周知の地磁気センサ10a、ジャイロスコープ10b、距離センサ10c、及び衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機10dを有している。これらのセンサ等は各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお精度によっては上述した内の一部で構成してもよく、更にステアリングの回転センサ、各転動輪の車両センサ等を用いてもよい。
【0017】
なお、位置検出器10は特許請求の範囲の現在位置特定手段に該当する。
メディアドライブ11は、記憶媒体(図示省略)が装着され、該記憶媒体に格納されている道路地図データ、位置検出の精度向上のためのいわゆるマップマッチング用データ、目印データを含む各種データなどの更新用データを記憶媒体からナビゲーションシステム1に読み込むことを可能とする。記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、HDD等を用いてもよい。
【0018】
地図データ入力器12は、前述のメディアドライブ11を介して記憶媒体から読み込んだ道路地図データ(道路地図情報)、マップマッチング用データ、目印データを含む各種データ等を記憶すると共に、それらのデータをナビゲーションECU20に入力する装置である。なお、道路地図データには、分岐点や交差点などの進行路を選択可能な地点(進行路選択地点)に関する情報、および自動走行が可能な路線である自動走行路線に関する情報が含まれる。データの記憶媒体としては、HDDやフラッシュメモリ等を用いてもよい。尚、地図データ入力器12には、電源のOFF後も消去してはいけないデータを記憶させたり、ユーザ指示により入力されたカスタマイズデータや音楽データなどを記憶させたりしても良い。
【0019】
なお、地図データ入力器12は特許請求の範囲の道路地図情報取得手段に該当する。
操作スイッチ群13は、例えば表示部16と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作によりナビゲーションECU20へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の実行指示を行う。
【0020】
リモコン14aには複数の操作スイッチ(図示省略)が設けられ、スイッチ操作によりリモコンセンサ14を介して各種指令信号がナビゲーションECU20に入力される。これにより、ナビゲーションECU20に前述のような各種機能を実行させる。なお、操作スイッチ群13とリモコン14aとは、何れのスイッチ操作によってもナビゲーションECU20に同じ機能を実行させることが可能である。
【0021】
なお、リモコン14aおよび操作スイッチ群13は目的地設定手段に該当する。
ところで、リモコン14aを介して、あるいは操作スイッチ群13を介して所望の目的地が設定されると、ナビゲーションECU20は、位置検出器10により検出された現在位置からその目的地までの最適な経路を自動的に探索して誘導経路を設定し表示する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。なお、ナビゲーションECU20は特許請求の範囲の経路計算手段に該当する。
【0022】
設定された経路は、地図データ入力器12からの情報(道路地図データ)に基づき、表示部16に表示される。より具体的に、表示部16に、道路地図データに基づく地図(道路地図)が表示されると共に、その表示された地図上に、位置検出器10により検出された現在位置を表す現在位置マークと、目的地までの経路とが重畳表示される。表示部16には、現在時刻、渋滞情報などの情報も表示することもできる。
【0023】
なお、ナビゲーションECU20は特許請求の範囲の経路案内手段に該当する。
表示部16は、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ等を用いて構成することができる。
【0024】
音声認識ユニット17は、例えば図示しないマイクを介して入力された操作者の入力音声と、内部に記憶する認識辞書(図示省略)中の語彙データ(比較対象パターン)とを照合し、最も一致度の高いものを認識結果としてナビゲーションECU20に入力する。ナビゲーションECU20は、音声認識ユニット17からの情報(認識結果)に基づき、操作者の発声に対する所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更
処理、音量調整処理等)を実行する。
【0025】
スピーカ18は、ナビゲーションECU20の制御により、例えば経路案内のための音声、画面操作の説明、或いは音声認識結果等を車室内に報知する。
送受信機19は、外部(例えばVICSシステムなどのインフラやインターネットなどのサーバ)から提供される交通情報、気象情報、施設情報、広告情報等を受信し、また外部へ車両情報、ユーザ情報等を発信する装置である。外部から受け取った情報はナビゲーションECU20に入力する。また必要であれば、ナビゲーションECU20で処理した情報を送受信機19を介して外部に出力することもできる。
【0026】
なお、自動走行路線を判断するデータは、上述のように地図データ入力器12が道路地図データから取得してもよいし、送受信機19が外部から取得するようにしてもよい。そして、ナビゲーションECU20が経路探索する際に、自動走行路線を判断するデータを参照して、計算を行う道路が「自動走行路線」に該当するかどうかの判定を行う。また、自動走行を制御している情報フラグの取得などにより、自車が自動走行中であることを認識した場合に、設定されている経路が自動走行路線から離脱する場合の案内タイミングを事前に実施できるようにすることで自動運転から手動運転への切替時により安全に走行することができ、かつ各自のフィーリングに合致した案内タイミングの提供をおこなうことが可能となる。
【0027】
[2.案内タイミング変更処理の説明]
次に、ナビゲーションECU20が実行する案内タイミング変更処理を、図2のフローチャートを参照して説明する。
【0028】
本処理は、ナビゲーションECU20によって他の処理からは独立して実行される。
まず、最初のステップS110では、実走行に応じた各種情報を入力するとともに、道路地図データを取得する。
【0029】
続くS120では、自車が自動走行路線を走行中であるか否かを判断する。自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で案内を実行するが、変更後は高速道路上の1500m手前で案内を実行するといった具合である。なお、変更後の分岐案内タイミングについては、一律的に設定されてもよいが、少なくとも自車を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めるよう設定されることが好ましい。そして、この処理の実行後に後述するS130に移行する。
【0030】
一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断して、そのままS130に移行する。
【0031】
S130では、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する。なお、上記S120で分岐案内タイミングが切り替えられた場合には、切替後の分岐案内タイミングにて案内を実行することとなる。
【0032】
続くS140では、S130で実行した案内が、目的地に関する案内であるか否かを判断する。S130で実行した案内が目的地に関する案内ではないと判断された場合には(S140:NO)、案内する地点が目的地と一致するまでは案内を繰り返し実行するため、S110に戻る。一方、S130で実行した案内が目的地に関する案内であると判断された場合には(S140:YES)、案内を終了してもよいと判断して、本処理を終了する。
【0033】
なお、S120の処理が特許請求の範囲の判断手段に該当する。また、S150の処理が特許請求の範囲の設定手段に該当する。
[3.実施形態の効果]
(1)このように本実施形態のナビゲーションECU20によれば、自動走行路線を走行中であると判断された場合に進行路選択地点案内を実行するタイミングを早めることにより、自動走行路線を自動運転中に自動運転から手動運転への切替を行う際に、より安全なナビゲーションを実現することができる。
【0034】
(2)また、本実施形態のナビゲーションECU20によれば、変更後の分岐案内タイミングを、少なくとも自車を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めるよう設定されることにより、更により安全なナビゲーションを実現することができる。
【0035】
[4.他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、以下のような様々な態様にて実施することが可能である。
【0036】
(1)上記実施形態では、自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替えるが(S150)、これには限られず、進行路選択地点への到達所要時間が所定値よりも小さくなった場合に、案内を実行するようにしてもよい。つまり、現在位置から進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、進行路選択地点に関する案内を実行するのである。このようにしても、より安全なナビゲーションを実現することができる。
【0037】
(2)なお、算出した所要時間を評価するための所定値については、ユーザによる指示に従い、リモコン14aを介して、あるいは操作スイッチ群13を介して変更可能にしてもよい。このようにすれば、ユーザの利便性を高めることができ、より安全なナビゲーションの実現に寄与することができる。
【符号の説明】
【0038】
1…ナビゲーションシステム、10…位置検出器、10a…地磁気センサ、10b…ジャイロスコープ、10c…距離センサ、10d…GPS受信機、11…メディアドライブ、12…地図データ入力器、13…操作スイッチ群、14…リモコンセンサ、14a…リモコン、15…外部メモリ、16…表示部、17…音声認識ユニット、18…スピーカ、19…送受信機、20…ナビゲーションECU
【技術分野】
【0001】
本発明は、ユーザに指定された条件に従って現在地から目的地までの適切な経路を探索し、探索された経路を設定するとともに経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をモニタ上に道路地図と共に表示したり、ユーザに指定された条件に従って現在地から目的地までの適切な経路を探索し、探索された経路を設定するとともに経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
ところで、近年、ドライバが車両の運転を行わずに、当該車両に付随する補助装置によって自動で当該車両を運行可能な路線(以下自動走行路線)が研究されている。
例えば、特許文献1には、車両の走行経路上に配列された磁気ネイルにより、所定間隔毎に、所定の磁気配列を有する距離マークを設けておき、スタート地点からの走行中、車輪の回転数に基づき車両の走行距離を算出し、その走行距離を距離マークを検出する毎に、距離マークの検出回数と距離マークの間隔との積により表される距離に訂正し、訂正した走行距離に基づいて車両の走行位置を検知する点が記載されている。なお、上述の磁気ネイルが配列された車両の走行経路が自動走行路線として機能する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平09−184738号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のような自動走行路線を自動運転中に、自動運転から手動運転への切替を行う場合には、この切替が安全に行われることが好ましい。
本発明は、このような課題に鑑みなされたものであり、その目的とするところは、自動走行路線を自動運転中に自動運転から手動運転への切替を行う場合に、より安全なナビゲーションを実行可能なナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するためになされた請求項1に係るナビゲーション装置によれば、道路地図情報取得手段が、道路地図情報を取得可能であり、経路計算手段が、現在位置特定手段によって特定された現在位置から目的地設定手段によって設定された目的地へ至る経路を、道路地図情報取得手段によって取得された道路地図情報を参照して計算する。なお、道路地図情報には、分岐点や交差点など進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含まれる。そして、経路案内手段が、経路計算手段によって計算された経路を案内する経路案内を実行する。なお、上述の経路案内手段は、経路案内として経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能である。
【0007】
そして、判断手段が経路上の自動走行路線を走行中であることを判断し、判断手段によって自動走行路線を走行中であると判断された場合には、設定手段が、経路案内手段による進行路選択地点案内を実行するタイミングを早める。
【0008】
このように、自動走行路線を走行中であると判断された場合に進行路選択地点案内を実行するタイミングを早めることにより、自動走行路線を自動運転中に自動運転から手動運転への切替を行う際に、より安全なナビゲーションを実現することができる。
【0009】
この場合、上述の経路案内手段による進行路選択地点案内を実行するタイミングを、少なくとも当該ナビゲーション装置が搭載される車両を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めることが考えられる(請求項2)。
【0010】
このようにすれば、更により安全なナビゲーションを実現することができる。
また、現在位置から進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、経路案内手段による進行路選択地点案内を実行するようにしてもよい(請求項3)。
【0011】
このようにしても、より安全なナビゲーションを実現することができる。
なお、所定値については、ユーザによる指示に従って変更可能にすることが考えられる(請求項4)。このようにすれば、ユーザの利便性を高めることができ、より安全なナビゲーションの実現に寄与することができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態のナビゲーションシステム1の概略構成図
【図2】案内タイミング変更処理を表すフローチャート
【発明を実施するための形態】
【0013】
以下に本発明の実施形態を図面とともに説明する。
[1.ナビゲーションシステム1の構成の説明]
図1において、ナビゲーションシステム1は、位置検出器10と、メディアドライブ11と、地図データ入力器12と、操作スイッチ群13と、リモコンセンサ14と、リモートコントロール端末(以下リモコンと称する)14aと、外部メモリ15と、表示部16と、音声認識ユニット17と、スピーカ18と、送受信機19と、これら各装置と接続されてその各装置を制御するナビゲーションECU(ECU:電子制御装置)20とを備えている。
【0014】
ナビゲーションECU20は、通常のコンピュータとして構成されており、内部にはCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(何れも図示省略)が備えられている。
【0015】
ナビゲーションECU20は、位置検出器10、地図データ入力器12、操作スイッチ群13、リモコンセンサ14、外部メモリ15、音声認識ユニット17、送受信機19等から入力された各種情報に基づき、所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。なお、これらの各処理については公知技術に従うので、ここではその詳細な説明は省略する。
【0016】
位置検出器10は、いずれも周知の地磁気センサ10a、ジャイロスコープ10b、距離センサ10c、及び衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機10dを有している。これらのセンサ等は各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお精度によっては上述した内の一部で構成してもよく、更にステアリングの回転センサ、各転動輪の車両センサ等を用いてもよい。
【0017】
なお、位置検出器10は特許請求の範囲の現在位置特定手段に該当する。
メディアドライブ11は、記憶媒体(図示省略)が装着され、該記憶媒体に格納されている道路地図データ、位置検出の精度向上のためのいわゆるマップマッチング用データ、目印データを含む各種データなどの更新用データを記憶媒体からナビゲーションシステム1に読み込むことを可能とする。記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、HDD等を用いてもよい。
【0018】
地図データ入力器12は、前述のメディアドライブ11を介して記憶媒体から読み込んだ道路地図データ(道路地図情報)、マップマッチング用データ、目印データを含む各種データ等を記憶すると共に、それらのデータをナビゲーションECU20に入力する装置である。なお、道路地図データには、分岐点や交差点などの進行路を選択可能な地点(進行路選択地点)に関する情報、および自動走行が可能な路線である自動走行路線に関する情報が含まれる。データの記憶媒体としては、HDDやフラッシュメモリ等を用いてもよい。尚、地図データ入力器12には、電源のOFF後も消去してはいけないデータを記憶させたり、ユーザ指示により入力されたカスタマイズデータや音楽データなどを記憶させたりしても良い。
【0019】
なお、地図データ入力器12は特許請求の範囲の道路地図情報取得手段に該当する。
操作スイッチ群13は、例えば表示部16と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作によりナビゲーションECU20へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の実行指示を行う。
【0020】
リモコン14aには複数の操作スイッチ(図示省略)が設けられ、スイッチ操作によりリモコンセンサ14を介して各種指令信号がナビゲーションECU20に入力される。これにより、ナビゲーションECU20に前述のような各種機能を実行させる。なお、操作スイッチ群13とリモコン14aとは、何れのスイッチ操作によってもナビゲーションECU20に同じ機能を実行させることが可能である。
【0021】
なお、リモコン14aおよび操作スイッチ群13は目的地設定手段に該当する。
ところで、リモコン14aを介して、あるいは操作スイッチ群13を介して所望の目的地が設定されると、ナビゲーションECU20は、位置検出器10により検出された現在位置からその目的地までの最適な経路を自動的に探索して誘導経路を設定し表示する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。なお、ナビゲーションECU20は特許請求の範囲の経路計算手段に該当する。
【0022】
設定された経路は、地図データ入力器12からの情報(道路地図データ)に基づき、表示部16に表示される。より具体的に、表示部16に、道路地図データに基づく地図(道路地図)が表示されると共に、その表示された地図上に、位置検出器10により検出された現在位置を表す現在位置マークと、目的地までの経路とが重畳表示される。表示部16には、現在時刻、渋滞情報などの情報も表示することもできる。
【0023】
なお、ナビゲーションECU20は特許請求の範囲の経路案内手段に該当する。
表示部16は、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ等を用いて構成することができる。
【0024】
音声認識ユニット17は、例えば図示しないマイクを介して入力された操作者の入力音声と、内部に記憶する認識辞書(図示省略)中の語彙データ(比較対象パターン)とを照合し、最も一致度の高いものを認識結果としてナビゲーションECU20に入力する。ナビゲーションECU20は、音声認識ユニット17からの情報(認識結果)に基づき、操作者の発声に対する所定の処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更
処理、音量調整処理等)を実行する。
【0025】
スピーカ18は、ナビゲーションECU20の制御により、例えば経路案内のための音声、画面操作の説明、或いは音声認識結果等を車室内に報知する。
送受信機19は、外部(例えばVICSシステムなどのインフラやインターネットなどのサーバ)から提供される交通情報、気象情報、施設情報、広告情報等を受信し、また外部へ車両情報、ユーザ情報等を発信する装置である。外部から受け取った情報はナビゲーションECU20に入力する。また必要であれば、ナビゲーションECU20で処理した情報を送受信機19を介して外部に出力することもできる。
【0026】
なお、自動走行路線を判断するデータは、上述のように地図データ入力器12が道路地図データから取得してもよいし、送受信機19が外部から取得するようにしてもよい。そして、ナビゲーションECU20が経路探索する際に、自動走行路線を判断するデータを参照して、計算を行う道路が「自動走行路線」に該当するかどうかの判定を行う。また、自動走行を制御している情報フラグの取得などにより、自車が自動走行中であることを認識した場合に、設定されている経路が自動走行路線から離脱する場合の案内タイミングを事前に実施できるようにすることで自動運転から手動運転への切替時により安全に走行することができ、かつ各自のフィーリングに合致した案内タイミングの提供をおこなうことが可能となる。
【0027】
[2.案内タイミング変更処理の説明]
次に、ナビゲーションECU20が実行する案内タイミング変更処理を、図2のフローチャートを参照して説明する。
【0028】
本処理は、ナビゲーションECU20によって他の処理からは独立して実行される。
まず、最初のステップS110では、実走行に応じた各種情報を入力するとともに、道路地図データを取得する。
【0029】
続くS120では、自車が自動走行路線を走行中であるか否かを判断する。自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替える(S150)。例えば、通常は高速道路上の700m手前で案内を実行するが、変更後は高速道路上の1500m手前で案内を実行するといった具合である。なお、変更後の分岐案内タイミングについては、一律的に設定されてもよいが、少なくとも自車を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めるよう設定されることが好ましい。そして、この処理の実行後に後述するS130に移行する。
【0030】
一方、自車が自動走行路線を走行中ではないと判断された場合には(S120:NO)、分岐案内タイミングを切り替える(つまり早める)必要がないと判断して、そのままS130に移行する。
【0031】
S130では、経路上の進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミング(分岐案内タイミング)で実行する。なお、上記S120で分岐案内タイミングが切り替えられた場合には、切替後の分岐案内タイミングにて案内を実行することとなる。
【0032】
続くS140では、S130で実行した案内が、目的地に関する案内であるか否かを判断する。S130で実行した案内が目的地に関する案内ではないと判断された場合には(S140:NO)、案内する地点が目的地と一致するまでは案内を繰り返し実行するため、S110に戻る。一方、S130で実行した案内が目的地に関する案内であると判断された場合には(S140:YES)、案内を終了してもよいと判断して、本処理を終了する。
【0033】
なお、S120の処理が特許請求の範囲の判断手段に該当する。また、S150の処理が特許請求の範囲の設定手段に該当する。
[3.実施形態の効果]
(1)このように本実施形態のナビゲーションECU20によれば、自動走行路線を走行中であると判断された場合に進行路選択地点案内を実行するタイミングを早めることにより、自動走行路線を自動運転中に自動運転から手動運転への切替を行う際に、より安全なナビゲーションを実現することができる。
【0034】
(2)また、本実施形態のナビゲーションECU20によれば、変更後の分岐案内タイミングを、少なくとも自車を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めるよう設定されることにより、更により安全なナビゲーションを実現することができる。
【0035】
[4.他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、以下のような様々な態様にて実施することが可能である。
【0036】
(1)上記実施形態では、自車が自動走行路線を走行中であると判断された場合には(S120:YES)、分岐案内タイミングを切り替える(つまり早める)必要があると判断して、分岐案内タイミングを切り替えるが(S150)、これには限られず、進行路選択地点への到達所要時間が所定値よりも小さくなった場合に、案内を実行するようにしてもよい。つまり、現在位置から進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、進行路選択地点に関する案内を実行するのである。このようにしても、より安全なナビゲーションを実現することができる。
【0037】
(2)なお、算出した所要時間を評価するための所定値については、ユーザによる指示に従い、リモコン14aを介して、あるいは操作スイッチ群13を介して変更可能にしてもよい。このようにすれば、ユーザの利便性を高めることができ、より安全なナビゲーションの実現に寄与することができる。
【符号の説明】
【0038】
1…ナビゲーションシステム、10…位置検出器、10a…地磁気センサ、10b…ジャイロスコープ、10c…距離センサ、10d…GPS受信機、11…メディアドライブ、12…地図データ入力器、13…操作スイッチ群、14…リモコンセンサ、14a…リモコン、15…外部メモリ、16…表示部、17…音声認識ユニット、18…スピーカ、19…送受信機、20…ナビゲーションECU
【特許請求の範囲】
【請求項1】
現在位置を特定可能な現在位置特定手段と、
目的地を設定する目的地設定手段と、
進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含む道路地図情報を取得可能な道路地図情報取得手段と、
前記現在位置特定手段によって特定された現在位置から前記目的地設定手段によって設定された目的地へ至る経路を、前記道路地図情報取得手段によって取得された道路地図情報を参照して計算する経路計算手段と、
前記経路計算手段によって計算された経路を案内する経路案内を実行する経路案内手段と、
を備えるナビゲーション装置であって、
前記経路案内手段は、前記経路案内として前記経路上の前記進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能であり、
さらに、
前記経路上の前記自動走行路線を走行中であることを判断する判断手段と、
前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記経路案内手段による前記進行路選択地点案内を実行するタイミングを早める設定手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記設定手段は、前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記経路案内手段による前記進行路選択地点案内を実行するタイミングを、少なくとも当該ナビゲーション装置が搭載される車両を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めることを特徴とするナビゲーション装置。
【請求項3】
現在位置を特定可能な現在位置特定手段と、
目的地を設定する目的地設定手段と、
進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含む道路地図情報を取得可能な道路地図情報取得手段と、
前記現在位置特定手段によって特定された現在位置から前記目的地設定手段によって設定された目的地へ至る経路を、前記道路地図情報取得手段によって取得された道路地図情報を参照して計算する経路計算手段と、
前記経路計算手段によって計算された経路を案内する経路案内を実行する経路案内手段と、
を備えるナビゲーション装置であって、
前記経路案内手段は、前記経路案内として前記経路上の前記進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能であり、
さらに、
前記経路上の前記自動走行路線を走行中であることを判断する判断手段を備え、
前記経路案内手段は、前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記現在位置から前記進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、前記経路案内手段による前記進行路選択地点案内を実行すること
を特徴とするナビゲーション装置。
【請求項4】
請求項3に記載のナビゲーション装置において、
ユーザによる指示に従って前記所定値を変更する変更手段を備えることを特徴とするナビゲーション装置。
【請求項1】
現在位置を特定可能な現在位置特定手段と、
目的地を設定する目的地設定手段と、
進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含む道路地図情報を取得可能な道路地図情報取得手段と、
前記現在位置特定手段によって特定された現在位置から前記目的地設定手段によって設定された目的地へ至る経路を、前記道路地図情報取得手段によって取得された道路地図情報を参照して計算する経路計算手段と、
前記経路計算手段によって計算された経路を案内する経路案内を実行する経路案内手段と、
を備えるナビゲーション装置であって、
前記経路案内手段は、前記経路案内として前記経路上の前記進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能であり、
さらに、
前記経路上の前記自動走行路線を走行中であることを判断する判断手段と、
前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記経路案内手段による前記進行路選択地点案内を実行するタイミングを早める設定手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記設定手段は、前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記経路案内手段による前記進行路選択地点案内を実行するタイミングを、少なくとも当該ナビゲーション装置が搭載される車両を自動運転モードから手動運転モードへ切り替えるのに要する時間分早めることを特徴とするナビゲーション装置。
【請求項3】
現在位置を特定可能な現在位置特定手段と、
目的地を設定する目的地設定手段と、
進行路を選択可能な地点である進行路選択地点に関する情報および自動走行が可能な路線である自動走行路線に関する情報を含む道路地図情報を取得可能な道路地図情報取得手段と、
前記現在位置特定手段によって特定された現在位置から前記目的地設定手段によって設定された目的地へ至る経路を、前記道路地図情報取得手段によって取得された道路地図情報を参照して計算する経路計算手段と、
前記経路計算手段によって計算された経路を案内する経路案内を実行する経路案内手段と、
を備えるナビゲーション装置であって、
前記経路案内手段は、前記経路案内として前記経路上の前記進行路選択地点を案内する進行路選択地点案内をその到達前の所定タイミングで実行可能であり、
さらに、
前記経路上の前記自動走行路線を走行中であることを判断する判断手段を備え、
前記経路案内手段は、前記判断手段によって前記自動走行路線を走行中であると判断された場合には、前記現在位置から前記進行路選択地点へ到達するのに要する所要時間を算出し、算出した所要時間が所定値以下であるときに、前記経路案内手段による前記進行路選択地点案内を実行すること
を特徴とするナビゲーション装置。
【請求項4】
請求項3に記載のナビゲーション装置において、
ユーザによる指示に従って前記所定値を変更する変更手段を備えることを特徴とするナビゲーション装置。
【図1】


【図2】
【図2】
【公開番号】特開2011−257234(P2011−257234A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131212(P2010−131212)
【出願日】平成22年6月8日(2010.6.8)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月8日(2010.6.8)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]