
ナビゲーション装置
【課題】使い勝手に優れたナビゲーション装置を提供する。
【解決手段】経由地および目的地を設定する設定手段3と、設定された経由地を経由して目的地に至る経路を探索する経路探索部130と、探索された経路に沿って誘導案内を行う誘導案内部140と、自車の位置と進行方向とを検出する自車位置検出部90と、誘導案内部において自車が直近の経由地に至る経路から所定距離以上逸脱して直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段2、4と、該メッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段3とを備え、経路探索部は、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する。
【解決手段】経由地および目的地を設定する設定手段3と、設定された経由地を経由して目的地に至る経路を探索する経路探索部130と、探索された経路に沿って誘導案内を行う誘導案内部140と、自車の位置と進行方向とを検出する自車位置検出部90と、誘導案内部において自車が直近の経由地に至る経路から所定距離以上逸脱して直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段2、4と、該メッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段3とを備え、経路探索部は、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、経路探索により得られた経由地を含む経路を誘導案内するナビゲーション装置に関し、特に経路上の経由地を経由することなく走行した場合にユーザに好適な情報を提供する技術に関するものである。
【背景技術】
【0002】
従来のナビゲーション装置においては、目的地とは別に複数の経由地を設定することが可能であり、これら複数の経由地を経由して目的地に至る経路を探索する。そして、経路探索により得られた経路を、目的地に到着するまで画面と音声で誘導案内する。これにより、ユーザは、誘導案内に従って走行することにより、所望の経由地を経由して目的地に向かうことができる。
【0003】
ところで、ユーザは、複数の経由地を経由する経路上を目的地または経由地に向かって走行する時に、自己の意志に従って、または、自己の意志に反して、ある経由地を経由することなく、その経由地より先に存在する他の経由地または目的地に向かって経路上を走行する場合がある。この場合、ナビゲーション装置は、経由しなかった経由地に戻る経路、または、経由しなかった経由地が設定されなかったものとした経路を、ユーザの意志とは無関係に自動的に再探索し、新たな経路としてユーザに提供する。
【0004】
このようなナビゲーション装置として、特許文献1は、経由地を通過する前に、当該経由地を通過した後の案内経路に入ってしまった場合、案内経路が経由地を通過した後の経路に切り替えられることを防止できるカーナビゲーション装置を開示している。このカーナビゲーション装置は、車両が経由地に至る案内経路を離脱して当該経由地を通過した後の案内経路に移動したとき、現在位置から経由地までの距離が所定値(例えば1Km)を越えていれば、経由地を通過していないと判断して現在位置から当該経由地までの新たな経路を設定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−166834号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した従来のナビゲーション装置においては、例えば、「経由地を通り過ごしたかった」または「経由地を必ず通りたかった」などといったユーザの意志に反して、経由地に戻る経路または経由地が設定されなかったものとした経路を自動的に再探索して新しい経路を提供するので、使い勝手に劣るという問題がある。
【0007】
この発明は、上述した問題を解消するためになされたものであり、その課題は、経路上の経由しなかった経由地の取り扱いをユーザの意志で決定できる使い勝手に優れたナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、この発明に係るナビゲーション装置は、経由地および目的地を設定する設定手段と、設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、自車の位置と進行方向とを検出する自車位置検出部と、誘導案内部において自車が直近の経由地に至る経路から所定距離以上逸脱して直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、出力手段に出力された逸脱した旨を表すメッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、経路探索部は、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する。
【0009】
この発明に係るナビゲーション装置によれば、出力手段に出力された逸脱した旨を表すメッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段と、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する経路探索部を備えるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定できる使い勝手に優れたナビゲーション装置を提供できる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るナビゲーション装置の動作の概要を示す図である。
【図3】この発明の実施の形態1に係るナビゲーション装置において行われるメイン処理を示すフローチャートである。
【図4】この発明の実施の形態1に係るナビゲーション装置において表示される目的地設定画面の例を示す図である。
【図5】この発明の実施の形態1に係るナビゲーション装置において表示される探索条件設定画面の例を示す図である。
【図6−1】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理を示すフローチャートである。
【図6−2】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理を示すフローチャートである。
【図7】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理で表示される経由地通過選択メッセージの例を示す図である。
【発明を実施するための形態】
【0011】
実施の形態1.
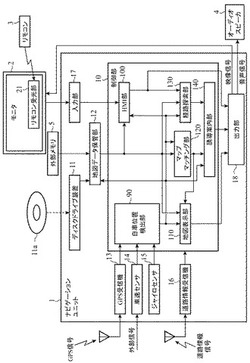
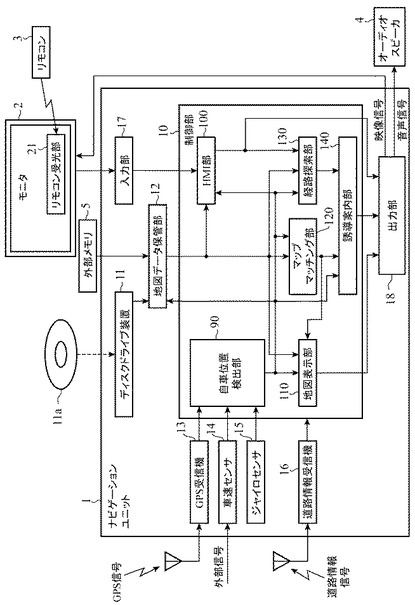
図1は、この発明の実施の形態1に係るナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、ナビゲーションユニット1、モニタ2、リモートコントローラ(以下、「リモコン」と略す)3、オーディオスピーカ4および外部メモリ5から構成されている。
【0012】
ナビゲーションユニット1は、このナビゲーション装置の中核をなすものであり、地図表示、経路探索、経路表示または誘導案内などの処理を実行する。このナビゲーションユニット1の詳細は後述する。
【0013】
モニタ2は、例えばLCD(Liquid Crystal Display)から構成されており、ナビゲーションユニット1から送られてくる映像信号に応じて、地図、自車位置マーク、目的地までの経路、経路案内図、その他の種々のメッセージを表示する。このモニタ2にはリモコン受光部21が設けられている。リモコン受光部21は、リモコン3から送られてくる光信号を受信し、モニタ2を経由して入力信号としてナビゲーションユニット1に送る。
【0014】
リモコン3は、ユーザがモニタ2に表示された地図をスクロールしたり、経由地および目的地を入力したり、操作を促すメッセージに応答したりするために使用される。なお、リモコン3の代わりに、または、リモコン3と併用して、タッチパネルを設けることもできる。タッチパネルは、モニタ2の画面に載置されたタッチセンサにより構成されており、ユーザは、このタッチセンサに直接に触れることにより、各種情報を入力する。
【0015】
オーディオスピーカ4は、ナビゲーションユニット1から送られてくる音声信号に応じて、誘導案内メッセージを音声で出力する。外部メモリ5はオプションであり、例えばメモリカードまたはUSBメモリなどから構成されている。この外部メモリ5には、後述するディスクドライブ装置11に挿入される記録媒体11aに格納される地図データと同様の地図データが記憶される。この外部メモリ5を使用すれば、大量の地図データを記憶することができるとともに、地図データへのアクセスを高速に行うことができる。
【0016】
次に、ナビゲーションユニット1の詳細を説明する。ナビゲーションユニット1は、制御部10、ディスクドライブ装置11、地図データ保管部12、GPS(Global Positioning System)受信機13、車速センサ14、ジャイロセンサ15、道路情報受信機16、入力部17および出力部18から構成されている。
【0017】
制御部10は、例えばマイクロコンピュータから構成されており、ナビゲーションユニット1の全体を制御する。この制御部10の詳細は後述する。
【0018】
ディスクドライブ装置11は、地図データが記録されたDVD(Digital Versatile Disc)またはCD(Compact Disc)といった記録媒体11aが挿入されることにより、その記録内容を再生する。地図データは、ノードおよび道路リンク情報、ならびに、レーンマーカなどといった地図情報などを含む。このディスクドライブ装置11で再生された地図データは、地図データ保管部12に送られる。
【0019】
地図データ保管部12は、ディスクドライブ装置11または外部メモリ5から送られてきた地図データを一時的に保管する。この地図データ保管部12に保管された地図データは、制御部10によって参照される。なお、地図データ保管部12は、HDD(Hard Disk Drive)から構成することもできる。この場合、ディスクドライブ装置11および外部メモリ5は不要になる。
【0020】
GPS受信機13は、GPS衛星からアンテナを介して受信されたGPS信号に基づき車両の現在位置を検出する。このGPS受信機13で検出された車両の現在位置は、現在位置信号として制御部10に送られる。
【0021】
車速センサ14は、このナビゲーション装置が搭載された車両から送られてくる外部信号に基づいて車両の速度を検出する。この車速センサ14で検出された車両の速度は、速度信号として制御部10に送られる。
【0022】
ジャイロセンサ15は、車両の進行方位を検出する。このジャイロセンサ15で検出された車両の進行方位は、方位信号として制御部10に送られる。
【0023】
道路情報受信機16は、例えば、外部の道路交通データ通信システムから送信される道路情報信号を受信する。この道路情報受信機16で受信された道路情報信号は、制御部10に送られる。制御部10は、この道路情報受信機16から送られてくる道路情報信号に基づいて道路の渋滞状況を表すメッセージを作成し、モニタ2およびオーディオスピーカ4を介して出力することによりユーザに知らせる。
【0024】
入力部17は、リモコン3からリモコン受光部21を介して送られてくる入力信号を受け取って解析し、この解析の結果を、操作指令として制御部10に送る。この発明の設定手段および入力手段は、モニタ2の画面に形成されたボタン、このボタンをポイントするリモコン3、リモコン受光部21および入力部17から構成されている。なお、設定手段および入力手段としては、マイクロフォン、このマイクロフォンから送られてくる音声信号を認識する音声認識機能を備えた入力部17から構成することもできる。
【0025】
出力部18は、制御部10から送られてくる地図を描画するための描画データ、自車位置マークおよび経路を描画するための描画データおよび操作指令に基づき映像信号を生成するとともに、制御部10から送られてくる音声データに基づき音声信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。また、出力部18で生成された音声信号はオーディオスピーカ4に送られる。この発明の出力手段は、出力部18、モニタ2およびオーディオスピーカ4から構成されている。
【0026】
次に、制御部10の詳細を説明する。制御部10は、例えばマイクロコンピュータから構成されており、このナビゲーションユニット1の全体を制御する。この制御部10は、自車位置検出部90、ヒューマンマシンインタフェース(以下、「HMI」と略す)部100、地図表示部110、マップマッチング部120、経路探索部130および誘導案内部140から構成されている。これらの構成要素は、マイクロコンピュータの制御下で動作するアプリケーションプログラムから構成されている。
【0027】
自車位置検出部90は、GPS受信機13から送られてくる現在位置信号に基づき車両の現在位置を検出するとともに、車速センサ14から送られてくる速度信号およびジャイロセンサ15から送られてくる方位信号に基づいて自立航法により車両の現在位置を検出する。例えばトンネルなどによりGPS受信機13がGPS信号を受信できなくなっても、自立航法によって車両の現在位置を検出できるので、ナビゲーション装置は、常に正しく車両の現在位置を検出できるようになっている。この自車位置検出部90で検出された自車の現在位置を表す現在位置データは、HMI部100、地図表示部110、マップマッチング部120、経路探索部130および誘導案内部140に送られる。
【0028】
HMI部100は、地図データ保管部12から送られてくる地図データおよび自車位置検出部90から送られてくる現在位置データを参照して、図示しない操作パネルまたは入力部17から送られてくる操作指令を処理する。このHMI部100により、ナビゲーション装置とユーザとの間のコミュニケーションがとられる。HMI部100において処理されたデータは、経路探索部130および出力部18に送られる。
【0029】
地図表示部110は、自車位置検出部90から送られてくる現在位置データによって示される地点の周辺の地図データを地図データ保管部12から読み出し、この読み出した地図データに基づき、モニタ2の画面に地図を表示させるための描画データを生成する。この地図表示部110で生成された描画データは、出力部18に送られる。
【0030】
マップマッチング部120は、自車位置検出部90から送られてくる現在位置データによって示される自車位置を、地図データ保管部12から読み出した地図データによって表される地図に対応させ、地図上に重畳する自車位置マークを形成する。マップマッチング部120により形成された自車位置マークを表すデータは、誘導案内部140に送られる。
【0031】
経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される自車の現在位置から、リモコン3を用いて設定された目的地(リモコン3→リモコン受光部21→入力部17→HMI部100の経路で送られてくる)までの最適な経路を、地図データ保管部12から読み出した地図データに基づいて、リモコン3を用いて設定された検索条件に従って探索する。この経路探索部130で探索された経路を表す経路データは、誘導案内部140に送られる。
【0032】
誘導案内部140は、自車位置検出部90から送られてくる現在位置データ、マップマッチング部120から送られてくる自車位置マークを表すデータおよび経路探索部130において探索された経路データに基づいて、モニタ2の画面に誘導案内図を表示するための描画データおよび誘導案内メッセージを音声で出力するための音声データを生成し、出力部18に送る。
【0033】
出力部18は、上述したように、制御部10の地図表示部110から送られてくる地図を描画するための描画データ、誘導案内部140から送られてくる自車位置マークおよび経路を描画するための描画データおよびHMI部100から送られてくる操作指令に基づき映像信号を生成するとともに、制御部10の誘導案内部140から送られてくる音声データに基づき音声信号を生成する。
【0034】
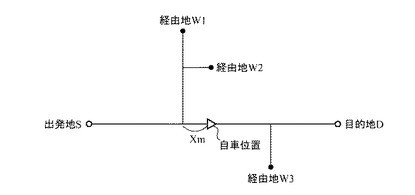
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーション装置の動作を説明する。このナビゲーション装置では、図2に示すように、出発地S→経由地W1→経由地W2→経由地W3→目的地Dという経路を走行中に、自車が直近の経由地(経由地W1)に至る経路から所定距離Xm(Xは任意の数)以上外れ、且つ、経路上を走行している場合に、ユーザの選択に応じて、直近の経由地(経由地W1)を経由する(戻る)経路、または、直近の経由地(経由地W1)を経由しない経路を再探索するようにしたものである。
【0035】
まず、このナビゲーション装置で行われるメイン処理を、図3に示すフローチャート、ならびに、図4および図5に示す画面例を参照しながら説明する。このメイン処理では、主に、出発地、目的地および経由地の設定、経路探索および誘導案内開始などの処理が行われる。以下、具体的に説明する。
【0036】
メイン処理では、電源が投入されると、まず、現在位置データおよび地図データが取得される(ステップST11)。すなわち、自車位置検出部90は、GPS受信機13から送られてくる自車位置信号に基づいて検出した自車位置または車速センサ14から送られてくる速度信号およびジャイロセンサ15から送られてくる方位信号を用いて自律航法により検出した自車位置を、現在位置データとしてマップマッチング部120に送る。また、ディスクドライブ装置11は、セットされた記録媒体11aから地図データを読み出して地図データ保管部12に格納する。
【0037】
自車位置検出部90から送られてくる現在位置データを受け取ったマップマッチング部120は、その現在位置データによって示される自車位置を、地図データ保管部12から読み出した地図データによって表される地図に対応させるマッチング処理を実行する。このマッチング処理により、地図上に自車位置マークが形成される。このマッチング処理により得られた自車位置マークを表すデータは、誘導案内部140に送られる。
【0038】
次いで、現在地画面表示が行われる(ステップST12)。すなわち、地図表示部110は、自車位置検出部90から送られてくる現在位置データによって示される地点の周辺の地図データを地図データ保管部12から読み出し、この読み出した地図データに基づき、モニタ2の画面に地図を表示させるための描画データを生成し、出力部18に送る。また、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータに基づいて、モニタ2の画面に自車位置マークを表示するための描画データを生成し、出力部18に送る。出力部18は、地図表示部110および誘導案内部140から受け取った描画データに基づき映像信号を生成し、モニタ2に送る。モニタ2は、出力部18から送られてくる映像信号に基づき、自車の現在位置を中心とする地図上に自車位置マークが重畳された地図を、現在地画面として表示する。
【0039】
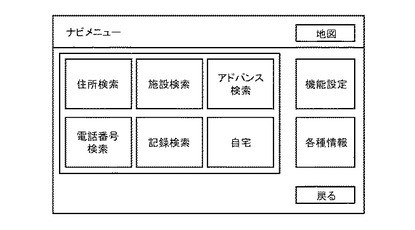
次いで、目的地の設定が行われる(ステップST13)。すなわち、ユーザがリモコン3を用いて目的地設定を指示する操作を行うと、図4に示すような目的地設定画面がモニタ2に表示される。なお、この目的地設定画面において、矩形で囲った部分はボタンであり、利用者は、リモコン3を用いて所望のボタンを押下することにより、そのボタンに割り当てられている機能を実行させることができる。以下に説明する各画面においても同様である。
【0040】
ユーザは、リモコン3を使用して、住所検索、施設検索または電話番号検索などを選択することにより、モニタ2に表示されている地図上に目的地および経由地を設定する。この場合、ユーザは、複数の経由地を設定することができる。リモコン3により設定された目的地および経由地を示すデータは、ナビゲーションユニット1の入力部17およびHMI部100を経由して経路探索部130に送られる。
【0041】
次いで、探索条件の設定が行われる(ステップST14)。すなわち、ステップST13における目的地設定が完了すると、図5に示すような探索条件設定画面がモニタ2に表示される。ユーザは、リモコン3を使用してモニタ2に表示されている経路探索の条件を設定する。具体的には、ユーザは、経路優先条件を表す「最速ルート」、「最短ルート」または「容易ルート」のいずれかのボタンを押すことにより探索優先条件を設定する。また、高速道路、有料道路、フェリー船、回避経路エリアおよび時間制限道路の各項目について、「使用する」ボタンまたは「使用しない」ボタンのいずれか押して、これらの使用可否を設定する。
【0042】
なお、図5に示す探索条件設定画面における「地図」ボタンはモニタ2の画面を現在地画面に戻すために使用され、「決定」ボタンは設定内容を確定するために使用され、「初期設定」ボタンは探索条件を初期値に戻すために使用され、「戻る」ボタンは前の画面に戻すために使用される。この探索条件設定画面の「決定」ボタンが押されると、設定された探索条件を表すデータは、ナビゲーションユニット1の入力部17およびHMI部100を経由して経路探索部130に送られる。
【0043】
次いで、経路探索処理が実行される(ステップST15)。すなわち、経路探索部130は、自車位置検出部90から受け取った現在位置データによって示される現在位置から、ステップST13で設定された経由地を通って目的地に至るまでの経路を、ステップST14において設定された探索条件に従って探索する。この探索された経路を表す経路データは誘導案内部140に送られる。
【0044】
次いで、経路誘導案内処理が実行される(ステップST16)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる現在位置データ、マップマッチング部120から送られてくる自車位置マークを表すデータおよび経路探索部130から送られてくる経路データに基づいて、モニタ2の画面に誘導案内図を表示するための描画データおよび誘導案内メッセージを音声で出力するための音声データを生成し、出力部18に送る。
【0045】
次いで、経路表示が行われる(ステップST17)。すなわち、出力部18は、制御部10の地図表示部110から送られてくる地図を表す描画データおよび誘導案内部140から送られてくる経路および自車位置を表す描画データに基づき映像信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。これにより、モニタ2に誘導経路および経路案内が表示される。この状態で、ユーザは、モニタ2に表示された経路が、意図していた経路であることを確認した後、モニタ2の画面に設けられたボタン(図示しない)の押下または音声などにより案内開始を指示する。
【0046】
次いで、経路誘導案内が開始される(ステップST18)。すなわち、ステップST17において、案内開始が指示されると、経路誘導案内が開始される。具体的には、出力部18は、制御部10の地図表示部110から送られてくる地図を表す描画データおよび誘導案内部140から送られてくる経路および自車位置を表す描画データに基づき映像信号を生成するとともに、制御部10の誘導案内部140から送られてくる音声データに基づき音声信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。これにより、モニタ2に誘導経路および経路案内が表示される。また、出力部18で生成された音声信号はオーディオスピーカ4に送られる。これにより、オーディオスピーカ4から誘導案内メッセージが出力される。以後は、車両の進行に連れて変化する環境に対応した誘導案内メッセージが順次出力されるので、ユーザは、誘導案内に沿って自車を走行させる。
【0047】
次に、上述したメイン処理によって経路誘導案内が開始された後の経路誘導案内処理を、経由地に至る経路を逸脱した場合の処理を中心に、図6に示すフローチャートを参照しながら説明する。
【0048】
経路誘導案内が開始されると、ユーザは、誘導案内に従って経路上を走行する。ナビゲーション装置は、経路誘導案内処理を実行する(ステップST21)。この経路誘導案内処理は、上述したステップST18における経路誘導案内を開始する場合の処理と同じである。
【0049】
次いで、経由地に向かう経路をXm以上逸脱したかどうかが調べられる(ステップST22)。すなわち、誘導案内部140は、経路探索部130から送られてくる経路データによって示される経路と、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置とがXm以上離れたかどうかを調べる。ここで、Xは、任意の値とすることができる。
【0050】
このステップST22において、経路をXm以上逸脱していないことが判断されると、シーケンスはステップST21に戻り、誘導案内処理を継続する。一方、ステップST22において、経路をXm以上逸脱したことが判断されると、次いで、直近の経由地より先の経路上であるかどうかが調べられる(ステップST23)。すなわち、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路上にあるかどうかを調べる。
【0051】
このステップST23において、直近の経由地より先の経路上でないことが判断されると、直近の経由地に至る前に経路を逸脱したことが認識され、直近の経由地を含む経路が再探索される(ステップST24)。すなわち、経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される現在位置から、直近の経由地を通って目的地に至るまでの経路を、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0052】
一方、ステップST23において、直近の経由地より先の経路上であることが判断されると、次いで、経由地通過選択メッセージが出力される(ステップST25)。すなわち、誘導案内部140は、経由地通過選択メッセージを表す描画データを生成して出力部18に送るとともに、音声データを生成して出力部18に送る。これにより、モニタ2に、図7に示すような、「はい」ボタンと「いいえ」ボタンを含む経由地通過選択メッセージが表示されるとともに、「経路を外れました。経由地を経由しますか?」という音声がオーディオスピーカ4から出力される。経由地通過選択メッセージは、この発明の「メッセージ」に対応する。
【0053】
次いで、経路を逸脱したかどうかが調べられる(ステップST26)。すなわち、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路から離れたかどうかを調べる。このステップST26において、経路を逸脱したことが判断されると、経由地通過選択メッセージが消去される(ステップST27)。すなわち、誘導案内部140は、経由地通過選択メッセージを表す描画データを出力部18に送る処理を停止する。これにより、モニタ2に表示されていた経由地通過選択メッセージが消去される。その後、シーケンスはステップST24に進み、上述した直近の経由地を含む経路が再探索される。
【0054】
一方、ステップST26において、経路を逸脱していないことが判断されると、次いで、「はい」ボタンが押下されたかどうかが調べられる(ステップST28)。すなわち、誘導案内部140は、リモコン3からリモコン受光部21、入力部17およびHMI部100を介して、「はい」ボタンが押下されたことを示すデータが送られてきたかどうかを調べる。このステップST28において、「はい」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通ることを選択したことが認識され、シーケンスはステップST24に進んで、上述した直近の経由地を含む経路が再探索される。
【0055】
一方、ステップST28において、「はい」ボタンが押下されていないことが判断されると、次いで、「いいえ」ボタンが押下されたかどうかが調べられる(ステップST29)。すなわち、誘導案内部140は、リモコン3からリモコン受光部21、入力部17およびHMI部100を介して、「いいえ」ボタンが押下されたことを示すデータが送られてきたかどうかを調べる。
【0056】
このステップST29において、「いいえ」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通らないことを選択したことが認識され、経由地の自動変更が行われる(ステップST30)。すなわち、経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される現在位置と地図データ保管部12から取得した地図データによって示される地図とを照合し、直近の経由地の先に存在する他の経由地を新たな経由地として設定する。
【0057】
次いで、直近の経由地より先に存在する経由地を含む経路が再探索される(ステップST31)。すなわち、経路探索部130は、ステップST30で設定された新たな経由地を通って目的地に至るまでの経路を、自車の位置および進行方向などといった自車の状態、および、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0058】
なお、上述したステップST30およびステップST31の処理の代わりに、ステップST32およびステップST33の処理を実行するように構成できる。この場合の処理を以下に説明する。ステップST29において、「いいえ」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通らないことを選択したことが認識され、経由地リストの変更が行われる(ステップST32)。すなわち、経路探索部130は、その時点で設定されているすべての経由地を表すデータを誘導案内部140に送る。誘導案内部140は、受け取った経由地を表すデータに基づき経由地の一覧である経由地リストを表示するための描画データを生成し、出力部18に送る。これにより、モニタ2に、経由地リストが表示される。この状態で、ユーザは、リモコン3を用いて、経由を希望する経由地を選択、または、経由を希望しない経由地を消去する。これにより、新たな経由地が設定される。
【0059】
次いで、変更後の経由地を含む経路が再探索される(ステップST33)。すなわち、経路探索部130は、ステップST32で設定された新たな経由地を通って目的地に至るまでの経路を、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0060】
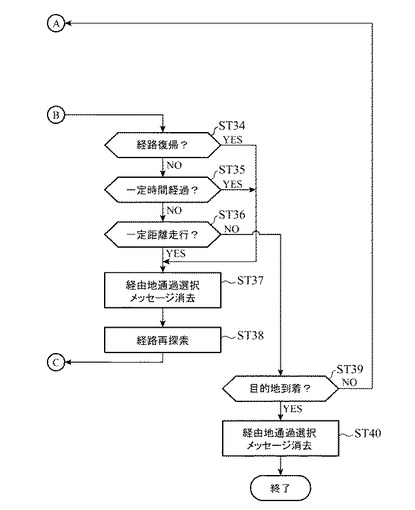
上記ステップST29において、「いいえ」ボタンが押下されていないことが判断されると、ユーザは、選択操作を放置していることが認識され、次いで、経路に復帰したかどうかが調べられる(ステップST34)。すなわち、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路上に存在するかどうかを調べる。
【0061】
このステップST34において、経路に復帰していないことが判断されると、次いで、一定時間が経過したかどうかが調べられる(ステップST35)。すなわち、誘導案内部140は、図示しないタイマを参照することにより、ステップST22において経路をXm以上逸脱したことを判断してから一定時間が経過したかどうかを調べる。このステップST35において、一定時間が経過していないことが判断されると、次いで、一定距離を走行したかどうかが調べられる(ステップST36)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる自車位置データによって示される位置が、ステップST22において経路をXm以上逸脱したことを判断してから一定距離だけ変化したかどうかを調べる。
【0062】
このステップST36において、一定距離を走行したことが判断された場合、上記ステップST34において、経路に復帰したことが判断された場合、および、上記ステップST35において、一定時間が経過したことが判断された場合は、経由地通過選択メッセージが消去される(ステップST37)。このステップST37の処理は、上述したステップST27の処理と同じである。
【0063】
次いで、経路再探索が実行される(ステップST38)。このステップST38においては、直近の経由地を経由する再探索を実行するか、直近の経由地を経由しない再探索を実行するかは、あらかじめナビゲーション装置で決定しておくように構成できるし、ユーザが選択するように構成することもできる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0064】
上記ステップST36において、一定距離を走行していないことが判断された場合は、次いで、目的地に到着したかどうかが調べられる(ステップST39)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる自車位置データによって示される位置が、目的地として設定されている位置に一致するかどうかを調べる。このステップST39において、目的地に到着していないことが判断されると、出力はステップST26に戻り、上述した処理が繰り返される。
【0065】
一方、ステップST39において、目的地に到着したことが判断されると、経由地通過選択メッセージが消去される(ステップST40)。このステップST40の処理は、上述したステップST27の処理と同じである。その後、経路誘導案内処理は終了する。
【0066】
以上説明したように、この発明の実施の形態1に係るナビゲーション装置によれば、直近の経由地に至る経路から所定距離以上逸脱して該直近の経由地より先に存在する経路を走行している場合に、逸脱した旨を表す経由地通過選択メッセージを出力し、この経由地通過選択メッセージに応答して、直近の経由地を経由するかどうかの指示できるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定できる。したがって、使い勝手に優れたナビゲーション装置を提供できる。
【0067】
以上のように、この発明に係るナビゲーション装置は、直近の経由地に至る経路から所定距離以上逸脱して該直近の経由地より先に存在する経路を走行している場合に、逸脱した旨を表すメッセージを出力し、このメッセージに応答して、直近の経由地を経由するかどうかの指示を入力できるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定でき、経路探索により得られた経由地を含む経路を誘導案内するカーナビゲーション装置などに用いるのに適している。
【符号の説明】
【0068】
1 ナビゲーションユニット、2 モニタ、3 リモートコントローラ、4 オーディオスピーカ、5 外部メモリ、10 制御部、11 ディスクドライブ装置、12 地図データ保管部、13 GPS受信機、14 車速センサ、15 ジャイロセンサ、16 道路情報受信機、17 入力部、18 出力部、90 自車位置検出部、100 ヒューマンマシンインタフェース部、110 地図表示部、120 マップマッチング部、130 経路探索部、140 誘導案内部。
【技術分野】
【0001】
この発明は、経路探索により得られた経由地を含む経路を誘導案内するナビゲーション装置に関し、特に経路上の経由地を経由することなく走行した場合にユーザに好適な情報を提供する技術に関するものである。
【背景技術】
【0002】
従来のナビゲーション装置においては、目的地とは別に複数の経由地を設定することが可能であり、これら複数の経由地を経由して目的地に至る経路を探索する。そして、経路探索により得られた経路を、目的地に到着するまで画面と音声で誘導案内する。これにより、ユーザは、誘導案内に従って走行することにより、所望の経由地を経由して目的地に向かうことができる。
【0003】
ところで、ユーザは、複数の経由地を経由する経路上を目的地または経由地に向かって走行する時に、自己の意志に従って、または、自己の意志に反して、ある経由地を経由することなく、その経由地より先に存在する他の経由地または目的地に向かって経路上を走行する場合がある。この場合、ナビゲーション装置は、経由しなかった経由地に戻る経路、または、経由しなかった経由地が設定されなかったものとした経路を、ユーザの意志とは無関係に自動的に再探索し、新たな経路としてユーザに提供する。
【0004】
このようなナビゲーション装置として、特許文献1は、経由地を通過する前に、当該経由地を通過した後の案内経路に入ってしまった場合、案内経路が経由地を通過した後の経路に切り替えられることを防止できるカーナビゲーション装置を開示している。このカーナビゲーション装置は、車両が経由地に至る案内経路を離脱して当該経由地を通過した後の案内経路に移動したとき、現在位置から経由地までの距離が所定値(例えば1Km)を越えていれば、経由地を通過していないと判断して現在位置から当該経由地までの新たな経路を設定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−166834号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した従来のナビゲーション装置においては、例えば、「経由地を通り過ごしたかった」または「経由地を必ず通りたかった」などといったユーザの意志に反して、経由地に戻る経路または経由地が設定されなかったものとした経路を自動的に再探索して新しい経路を提供するので、使い勝手に劣るという問題がある。
【0007】
この発明は、上述した問題を解消するためになされたものであり、その課題は、経路上の経由しなかった経由地の取り扱いをユーザの意志で決定できる使い勝手に優れたナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、この発明に係るナビゲーション装置は、経由地および目的地を設定する設定手段と、設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、自車の位置と進行方向とを検出する自車位置検出部と、誘導案内部において自車が直近の経由地に至る経路から所定距離以上逸脱して直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、出力手段に出力された逸脱した旨を表すメッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、経路探索部は、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する。
【0009】
この発明に係るナビゲーション装置によれば、出力手段に出力された逸脱した旨を表すメッセージに応答して、直近の経由地を経由するかどうかの指示を入力する入力手段と、入力手段から直近の経由地を経由しない旨の指示が入力された場合、自車位置検出部が検出した自車の位置と進行方向とに従って、直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索する経路探索部を備えるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定できる使い勝手に優れたナビゲーション装置を提供できる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るナビゲーション装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るナビゲーション装置の動作の概要を示す図である。
【図3】この発明の実施の形態1に係るナビゲーション装置において行われるメイン処理を示すフローチャートである。
【図4】この発明の実施の形態1に係るナビゲーション装置において表示される目的地設定画面の例を示す図である。
【図5】この発明の実施の形態1に係るナビゲーション装置において表示される探索条件設定画面の例を示す図である。
【図6−1】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理を示すフローチャートである。
【図6−2】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理を示すフローチャートである。
【図7】この発明の実施の形態1に係るナビゲーション装置において行われる経路誘導案内処理で表示される経由地通過選択メッセージの例を示す図である。
【発明を実施するための形態】
【0011】
実施の形態1.
図1は、この発明の実施の形態1に係るナビゲーション装置の構成を示すブロック図である。このナビゲーション装置は、ナビゲーションユニット1、モニタ2、リモートコントローラ(以下、「リモコン」と略す)3、オーディオスピーカ4および外部メモリ5から構成されている。
【0012】
ナビゲーションユニット1は、このナビゲーション装置の中核をなすものであり、地図表示、経路探索、経路表示または誘導案内などの処理を実行する。このナビゲーションユニット1の詳細は後述する。
【0013】
モニタ2は、例えばLCD(Liquid Crystal Display)から構成されており、ナビゲーションユニット1から送られてくる映像信号に応じて、地図、自車位置マーク、目的地までの経路、経路案内図、その他の種々のメッセージを表示する。このモニタ2にはリモコン受光部21が設けられている。リモコン受光部21は、リモコン3から送られてくる光信号を受信し、モニタ2を経由して入力信号としてナビゲーションユニット1に送る。
【0014】
リモコン3は、ユーザがモニタ2に表示された地図をスクロールしたり、経由地および目的地を入力したり、操作を促すメッセージに応答したりするために使用される。なお、リモコン3の代わりに、または、リモコン3と併用して、タッチパネルを設けることもできる。タッチパネルは、モニタ2の画面に載置されたタッチセンサにより構成されており、ユーザは、このタッチセンサに直接に触れることにより、各種情報を入力する。
【0015】
オーディオスピーカ4は、ナビゲーションユニット1から送られてくる音声信号に応じて、誘導案内メッセージを音声で出力する。外部メモリ5はオプションであり、例えばメモリカードまたはUSBメモリなどから構成されている。この外部メモリ5には、後述するディスクドライブ装置11に挿入される記録媒体11aに格納される地図データと同様の地図データが記憶される。この外部メモリ5を使用すれば、大量の地図データを記憶することができるとともに、地図データへのアクセスを高速に行うことができる。
【0016】
次に、ナビゲーションユニット1の詳細を説明する。ナビゲーションユニット1は、制御部10、ディスクドライブ装置11、地図データ保管部12、GPS(Global Positioning System)受信機13、車速センサ14、ジャイロセンサ15、道路情報受信機16、入力部17および出力部18から構成されている。
【0017】
制御部10は、例えばマイクロコンピュータから構成されており、ナビゲーションユニット1の全体を制御する。この制御部10の詳細は後述する。
【0018】
ディスクドライブ装置11は、地図データが記録されたDVD(Digital Versatile Disc)またはCD(Compact Disc)といった記録媒体11aが挿入されることにより、その記録内容を再生する。地図データは、ノードおよび道路リンク情報、ならびに、レーンマーカなどといった地図情報などを含む。このディスクドライブ装置11で再生された地図データは、地図データ保管部12に送られる。
【0019】
地図データ保管部12は、ディスクドライブ装置11または外部メモリ5から送られてきた地図データを一時的に保管する。この地図データ保管部12に保管された地図データは、制御部10によって参照される。なお、地図データ保管部12は、HDD(Hard Disk Drive)から構成することもできる。この場合、ディスクドライブ装置11および外部メモリ5は不要になる。
【0020】
GPS受信機13は、GPS衛星からアンテナを介して受信されたGPS信号に基づき車両の現在位置を検出する。このGPS受信機13で検出された車両の現在位置は、現在位置信号として制御部10に送られる。
【0021】
車速センサ14は、このナビゲーション装置が搭載された車両から送られてくる外部信号に基づいて車両の速度を検出する。この車速センサ14で検出された車両の速度は、速度信号として制御部10に送られる。
【0022】
ジャイロセンサ15は、車両の進行方位を検出する。このジャイロセンサ15で検出された車両の進行方位は、方位信号として制御部10に送られる。
【0023】
道路情報受信機16は、例えば、外部の道路交通データ通信システムから送信される道路情報信号を受信する。この道路情報受信機16で受信された道路情報信号は、制御部10に送られる。制御部10は、この道路情報受信機16から送られてくる道路情報信号に基づいて道路の渋滞状況を表すメッセージを作成し、モニタ2およびオーディオスピーカ4を介して出力することによりユーザに知らせる。
【0024】
入力部17は、リモコン3からリモコン受光部21を介して送られてくる入力信号を受け取って解析し、この解析の結果を、操作指令として制御部10に送る。この発明の設定手段および入力手段は、モニタ2の画面に形成されたボタン、このボタンをポイントするリモコン3、リモコン受光部21および入力部17から構成されている。なお、設定手段および入力手段としては、マイクロフォン、このマイクロフォンから送られてくる音声信号を認識する音声認識機能を備えた入力部17から構成することもできる。
【0025】
出力部18は、制御部10から送られてくる地図を描画するための描画データ、自車位置マークおよび経路を描画するための描画データおよび操作指令に基づき映像信号を生成するとともに、制御部10から送られてくる音声データに基づき音声信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。また、出力部18で生成された音声信号はオーディオスピーカ4に送られる。この発明の出力手段は、出力部18、モニタ2およびオーディオスピーカ4から構成されている。
【0026】
次に、制御部10の詳細を説明する。制御部10は、例えばマイクロコンピュータから構成されており、このナビゲーションユニット1の全体を制御する。この制御部10は、自車位置検出部90、ヒューマンマシンインタフェース(以下、「HMI」と略す)部100、地図表示部110、マップマッチング部120、経路探索部130および誘導案内部140から構成されている。これらの構成要素は、マイクロコンピュータの制御下で動作するアプリケーションプログラムから構成されている。
【0027】
自車位置検出部90は、GPS受信機13から送られてくる現在位置信号に基づき車両の現在位置を検出するとともに、車速センサ14から送られてくる速度信号およびジャイロセンサ15から送られてくる方位信号に基づいて自立航法により車両の現在位置を検出する。例えばトンネルなどによりGPS受信機13がGPS信号を受信できなくなっても、自立航法によって車両の現在位置を検出できるので、ナビゲーション装置は、常に正しく車両の現在位置を検出できるようになっている。この自車位置検出部90で検出された自車の現在位置を表す現在位置データは、HMI部100、地図表示部110、マップマッチング部120、経路探索部130および誘導案内部140に送られる。
【0028】
HMI部100は、地図データ保管部12から送られてくる地図データおよび自車位置検出部90から送られてくる現在位置データを参照して、図示しない操作パネルまたは入力部17から送られてくる操作指令を処理する。このHMI部100により、ナビゲーション装置とユーザとの間のコミュニケーションがとられる。HMI部100において処理されたデータは、経路探索部130および出力部18に送られる。
【0029】
地図表示部110は、自車位置検出部90から送られてくる現在位置データによって示される地点の周辺の地図データを地図データ保管部12から読み出し、この読み出した地図データに基づき、モニタ2の画面に地図を表示させるための描画データを生成する。この地図表示部110で生成された描画データは、出力部18に送られる。
【0030】
マップマッチング部120は、自車位置検出部90から送られてくる現在位置データによって示される自車位置を、地図データ保管部12から読み出した地図データによって表される地図に対応させ、地図上に重畳する自車位置マークを形成する。マップマッチング部120により形成された自車位置マークを表すデータは、誘導案内部140に送られる。
【0031】
経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される自車の現在位置から、リモコン3を用いて設定された目的地(リモコン3→リモコン受光部21→入力部17→HMI部100の経路で送られてくる)までの最適な経路を、地図データ保管部12から読み出した地図データに基づいて、リモコン3を用いて設定された検索条件に従って探索する。この経路探索部130で探索された経路を表す経路データは、誘導案内部140に送られる。
【0032】
誘導案内部140は、自車位置検出部90から送られてくる現在位置データ、マップマッチング部120から送られてくる自車位置マークを表すデータおよび経路探索部130において探索された経路データに基づいて、モニタ2の画面に誘導案内図を表示するための描画データおよび誘導案内メッセージを音声で出力するための音声データを生成し、出力部18に送る。
【0033】
出力部18は、上述したように、制御部10の地図表示部110から送られてくる地図を描画するための描画データ、誘導案内部140から送られてくる自車位置マークおよび経路を描画するための描画データおよびHMI部100から送られてくる操作指令に基づき映像信号を生成するとともに、制御部10の誘導案内部140から送られてくる音声データに基づき音声信号を生成する。
【0034】
次に、上記のように構成される、この発明の実施の形態1に係るナビゲーション装置の動作を説明する。このナビゲーション装置では、図2に示すように、出発地S→経由地W1→経由地W2→経由地W3→目的地Dという経路を走行中に、自車が直近の経由地(経由地W1)に至る経路から所定距離Xm(Xは任意の数)以上外れ、且つ、経路上を走行している場合に、ユーザの選択に応じて、直近の経由地(経由地W1)を経由する(戻る)経路、または、直近の経由地(経由地W1)を経由しない経路を再探索するようにしたものである。
【0035】
まず、このナビゲーション装置で行われるメイン処理を、図3に示すフローチャート、ならびに、図4および図5に示す画面例を参照しながら説明する。このメイン処理では、主に、出発地、目的地および経由地の設定、経路探索および誘導案内開始などの処理が行われる。以下、具体的に説明する。
【0036】
メイン処理では、電源が投入されると、まず、現在位置データおよび地図データが取得される(ステップST11)。すなわち、自車位置検出部90は、GPS受信機13から送られてくる自車位置信号に基づいて検出した自車位置または車速センサ14から送られてくる速度信号およびジャイロセンサ15から送られてくる方位信号を用いて自律航法により検出した自車位置を、現在位置データとしてマップマッチング部120に送る。また、ディスクドライブ装置11は、セットされた記録媒体11aから地図データを読み出して地図データ保管部12に格納する。
【0037】
自車位置検出部90から送られてくる現在位置データを受け取ったマップマッチング部120は、その現在位置データによって示される自車位置を、地図データ保管部12から読み出した地図データによって表される地図に対応させるマッチング処理を実行する。このマッチング処理により、地図上に自車位置マークが形成される。このマッチング処理により得られた自車位置マークを表すデータは、誘導案内部140に送られる。
【0038】
次いで、現在地画面表示が行われる(ステップST12)。すなわち、地図表示部110は、自車位置検出部90から送られてくる現在位置データによって示される地点の周辺の地図データを地図データ保管部12から読み出し、この読み出した地図データに基づき、モニタ2の画面に地図を表示させるための描画データを生成し、出力部18に送る。また、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータに基づいて、モニタ2の画面に自車位置マークを表示するための描画データを生成し、出力部18に送る。出力部18は、地図表示部110および誘導案内部140から受け取った描画データに基づき映像信号を生成し、モニタ2に送る。モニタ2は、出力部18から送られてくる映像信号に基づき、自車の現在位置を中心とする地図上に自車位置マークが重畳された地図を、現在地画面として表示する。
【0039】
次いで、目的地の設定が行われる(ステップST13)。すなわち、ユーザがリモコン3を用いて目的地設定を指示する操作を行うと、図4に示すような目的地設定画面がモニタ2に表示される。なお、この目的地設定画面において、矩形で囲った部分はボタンであり、利用者は、リモコン3を用いて所望のボタンを押下することにより、そのボタンに割り当てられている機能を実行させることができる。以下に説明する各画面においても同様である。
【0040】
ユーザは、リモコン3を使用して、住所検索、施設検索または電話番号検索などを選択することにより、モニタ2に表示されている地図上に目的地および経由地を設定する。この場合、ユーザは、複数の経由地を設定することができる。リモコン3により設定された目的地および経由地を示すデータは、ナビゲーションユニット1の入力部17およびHMI部100を経由して経路探索部130に送られる。
【0041】
次いで、探索条件の設定が行われる(ステップST14)。すなわち、ステップST13における目的地設定が完了すると、図5に示すような探索条件設定画面がモニタ2に表示される。ユーザは、リモコン3を使用してモニタ2に表示されている経路探索の条件を設定する。具体的には、ユーザは、経路優先条件を表す「最速ルート」、「最短ルート」または「容易ルート」のいずれかのボタンを押すことにより探索優先条件を設定する。また、高速道路、有料道路、フェリー船、回避経路エリアおよび時間制限道路の各項目について、「使用する」ボタンまたは「使用しない」ボタンのいずれか押して、これらの使用可否を設定する。
【0042】
なお、図5に示す探索条件設定画面における「地図」ボタンはモニタ2の画面を現在地画面に戻すために使用され、「決定」ボタンは設定内容を確定するために使用され、「初期設定」ボタンは探索条件を初期値に戻すために使用され、「戻る」ボタンは前の画面に戻すために使用される。この探索条件設定画面の「決定」ボタンが押されると、設定された探索条件を表すデータは、ナビゲーションユニット1の入力部17およびHMI部100を経由して経路探索部130に送られる。
【0043】
次いで、経路探索処理が実行される(ステップST15)。すなわち、経路探索部130は、自車位置検出部90から受け取った現在位置データによって示される現在位置から、ステップST13で設定された経由地を通って目的地に至るまでの経路を、ステップST14において設定された探索条件に従って探索する。この探索された経路を表す経路データは誘導案内部140に送られる。
【0044】
次いで、経路誘導案内処理が実行される(ステップST16)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる現在位置データ、マップマッチング部120から送られてくる自車位置マークを表すデータおよび経路探索部130から送られてくる経路データに基づいて、モニタ2の画面に誘導案内図を表示するための描画データおよび誘導案内メッセージを音声で出力するための音声データを生成し、出力部18に送る。
【0045】
次いで、経路表示が行われる(ステップST17)。すなわち、出力部18は、制御部10の地図表示部110から送られてくる地図を表す描画データおよび誘導案内部140から送られてくる経路および自車位置を表す描画データに基づき映像信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。これにより、モニタ2に誘導経路および経路案内が表示される。この状態で、ユーザは、モニタ2に表示された経路が、意図していた経路であることを確認した後、モニタ2の画面に設けられたボタン(図示しない)の押下または音声などにより案内開始を指示する。
【0046】
次いで、経路誘導案内が開始される(ステップST18)。すなわち、ステップST17において、案内開始が指示されると、経路誘導案内が開始される。具体的には、出力部18は、制御部10の地図表示部110から送られてくる地図を表す描画データおよび誘導案内部140から送られてくる経路および自車位置を表す描画データに基づき映像信号を生成するとともに、制御部10の誘導案内部140から送られてくる音声データに基づき音声信号を生成する。この出力部18で生成された映像信号はモニタ2に送られる。これにより、モニタ2に誘導経路および経路案内が表示される。また、出力部18で生成された音声信号はオーディオスピーカ4に送られる。これにより、オーディオスピーカ4から誘導案内メッセージが出力される。以後は、車両の進行に連れて変化する環境に対応した誘導案内メッセージが順次出力されるので、ユーザは、誘導案内に沿って自車を走行させる。
【0047】
次に、上述したメイン処理によって経路誘導案内が開始された後の経路誘導案内処理を、経由地に至る経路を逸脱した場合の処理を中心に、図6に示すフローチャートを参照しながら説明する。
【0048】
経路誘導案内が開始されると、ユーザは、誘導案内に従って経路上を走行する。ナビゲーション装置は、経路誘導案内処理を実行する(ステップST21)。この経路誘導案内処理は、上述したステップST18における経路誘導案内を開始する場合の処理と同じである。
【0049】
次いで、経由地に向かう経路をXm以上逸脱したかどうかが調べられる(ステップST22)。すなわち、誘導案内部140は、経路探索部130から送られてくる経路データによって示される経路と、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置とがXm以上離れたかどうかを調べる。ここで、Xは、任意の値とすることができる。
【0050】
このステップST22において、経路をXm以上逸脱していないことが判断されると、シーケンスはステップST21に戻り、誘導案内処理を継続する。一方、ステップST22において、経路をXm以上逸脱したことが判断されると、次いで、直近の経由地より先の経路上であるかどうかが調べられる(ステップST23)。すなわち、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路上にあるかどうかを調べる。
【0051】
このステップST23において、直近の経由地より先の経路上でないことが判断されると、直近の経由地に至る前に経路を逸脱したことが認識され、直近の経由地を含む経路が再探索される(ステップST24)。すなわち、経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される現在位置から、直近の経由地を通って目的地に至るまでの経路を、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0052】
一方、ステップST23において、直近の経由地より先の経路上であることが判断されると、次いで、経由地通過選択メッセージが出力される(ステップST25)。すなわち、誘導案内部140は、経由地通過選択メッセージを表す描画データを生成して出力部18に送るとともに、音声データを生成して出力部18に送る。これにより、モニタ2に、図7に示すような、「はい」ボタンと「いいえ」ボタンを含む経由地通過選択メッセージが表示されるとともに、「経路を外れました。経由地を経由しますか?」という音声がオーディオスピーカ4から出力される。経由地通過選択メッセージは、この発明の「メッセージ」に対応する。
【0053】
次いで、経路を逸脱したかどうかが調べられる(ステップST26)。すなわち、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路から離れたかどうかを調べる。このステップST26において、経路を逸脱したことが判断されると、経由地通過選択メッセージが消去される(ステップST27)。すなわち、誘導案内部140は、経由地通過選択メッセージを表す描画データを出力部18に送る処理を停止する。これにより、モニタ2に表示されていた経由地通過選択メッセージが消去される。その後、シーケンスはステップST24に進み、上述した直近の経由地を含む経路が再探索される。
【0054】
一方、ステップST26において、経路を逸脱していないことが判断されると、次いで、「はい」ボタンが押下されたかどうかが調べられる(ステップST28)。すなわち、誘導案内部140は、リモコン3からリモコン受光部21、入力部17およびHMI部100を介して、「はい」ボタンが押下されたことを示すデータが送られてきたかどうかを調べる。このステップST28において、「はい」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通ることを選択したことが認識され、シーケンスはステップST24に進んで、上述した直近の経由地を含む経路が再探索される。
【0055】
一方、ステップST28において、「はい」ボタンが押下されていないことが判断されると、次いで、「いいえ」ボタンが押下されたかどうかが調べられる(ステップST29)。すなわち、誘導案内部140は、リモコン3からリモコン受光部21、入力部17およびHMI部100を介して、「いいえ」ボタンが押下されたことを示すデータが送られてきたかどうかを調べる。
【0056】
このステップST29において、「いいえ」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通らないことを選択したことが認識され、経由地の自動変更が行われる(ステップST30)。すなわち、経路探索部130は、自車位置検出部90から送られてくる現在位置データによって示される現在位置と地図データ保管部12から取得した地図データによって示される地図とを照合し、直近の経由地の先に存在する他の経由地を新たな経由地として設定する。
【0057】
次いで、直近の経由地より先に存在する経由地を含む経路が再探索される(ステップST31)。すなわち、経路探索部130は、ステップST30で設定された新たな経由地を通って目的地に至るまでの経路を、自車の位置および進行方向などといった自車の状態、および、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0058】
なお、上述したステップST30およびステップST31の処理の代わりに、ステップST32およびステップST33の処理を実行するように構成できる。この場合の処理を以下に説明する。ステップST29において、「いいえ」ボタンが押下されたことが判断されると、ユーザは、直近の経由地、つまり向かっている経由地を通らないことを選択したことが認識され、経由地リストの変更が行われる(ステップST32)。すなわち、経路探索部130は、その時点で設定されているすべての経由地を表すデータを誘導案内部140に送る。誘導案内部140は、受け取った経由地を表すデータに基づき経由地の一覧である経由地リストを表示するための描画データを生成し、出力部18に送る。これにより、モニタ2に、経由地リストが表示される。この状態で、ユーザは、リモコン3を用いて、経由を希望する経由地を選択、または、経由を希望しない経由地を消去する。これにより、新たな経由地が設定される。
【0059】
次いで、変更後の経由地を含む経路が再探索される(ステップST33)。すなわち、経路探索部130は、ステップST32で設定された新たな経由地を通って目的地に至るまでの経路を、既に設定されている探索条件に従って再探索する。この再探索された経路を表す経路データは誘導案内部140に送られる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0060】
上記ステップST29において、「いいえ」ボタンが押下されていないことが判断されると、ユーザは、選択操作を放置していることが認識され、次いで、経路に復帰したかどうかが調べられる(ステップST34)。すなわち、誘導案内部140は、マップマッチング部120から送られてくる自車位置マークを表すデータによって示される位置が、経路探索部130から送られてくる経路データによって示される経路上に存在するかどうかを調べる。
【0061】
このステップST34において、経路に復帰していないことが判断されると、次いで、一定時間が経過したかどうかが調べられる(ステップST35)。すなわち、誘導案内部140は、図示しないタイマを参照することにより、ステップST22において経路をXm以上逸脱したことを判断してから一定時間が経過したかどうかを調べる。このステップST35において、一定時間が経過していないことが判断されると、次いで、一定距離を走行したかどうかが調べられる(ステップST36)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる自車位置データによって示される位置が、ステップST22において経路をXm以上逸脱したことを判断してから一定距離だけ変化したかどうかを調べる。
【0062】
このステップST36において、一定距離を走行したことが判断された場合、上記ステップST34において、経路に復帰したことが判断された場合、および、上記ステップST35において、一定時間が経過したことが判断された場合は、経由地通過選択メッセージが消去される(ステップST37)。このステップST37の処理は、上述したステップST27の処理と同じである。
【0063】
次いで、経路再探索が実行される(ステップST38)。このステップST38においては、直近の経由地を経由する再探索を実行するか、直近の経由地を経由しない再探索を実行するかは、あらかじめナビゲーション装置で決定しておくように構成できるし、ユーザが選択するように構成することもできる。その後、シーケンスはステップST21に戻り、経路誘導案内処理が続行される。
【0064】
上記ステップST36において、一定距離を走行していないことが判断された場合は、次いで、目的地に到着したかどうかが調べられる(ステップST39)。すなわち、誘導案内部140は、自車位置検出部90から送られてくる自車位置データによって示される位置が、目的地として設定されている位置に一致するかどうかを調べる。このステップST39において、目的地に到着していないことが判断されると、出力はステップST26に戻り、上述した処理が繰り返される。
【0065】
一方、ステップST39において、目的地に到着したことが判断されると、経由地通過選択メッセージが消去される(ステップST40)。このステップST40の処理は、上述したステップST27の処理と同じである。その後、経路誘導案内処理は終了する。
【0066】
以上説明したように、この発明の実施の形態1に係るナビゲーション装置によれば、直近の経由地に至る経路から所定距離以上逸脱して該直近の経由地より先に存在する経路を走行している場合に、逸脱した旨を表す経由地通過選択メッセージを出力し、この経由地通過選択メッセージに応答して、直近の経由地を経由するかどうかの指示できるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定できる。したがって、使い勝手に優れたナビゲーション装置を提供できる。
【0067】
以上のように、この発明に係るナビゲーション装置は、直近の経由地に至る経路から所定距離以上逸脱して該直近の経由地より先に存在する経路を走行している場合に、逸脱した旨を表すメッセージを出力し、このメッセージに応答して、直近の経由地を経由するかどうかの指示を入力できるように構成したので、経路から逸脱した場合の直近の経由地の取り扱いをユーザの意志で決定でき、経路探索により得られた経由地を含む経路を誘導案内するカーナビゲーション装置などに用いるのに適している。
【符号の説明】
【0068】
1 ナビゲーションユニット、2 モニタ、3 リモートコントローラ、4 オーディオスピーカ、5 外部メモリ、10 制御部、11 ディスクドライブ装置、12 地図データ保管部、13 GPS受信機、14 車速センサ、15 ジャイロセンサ、16 道路情報受信機、17 入力部、18 出力部、90 自車位置検出部、100 ヒューマンマシンインタフェース部、110 地図表示部、120 マップマッチング部、130 経路探索部、140 誘導案内部。
【特許請求の範囲】
【請求項1】
経由地および目的地を設定する設定手段と、
前記設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、
前記経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、
自車の位置と進行方向とを検出する自車位置検出部と、
前記誘導案内部において前記自車が直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、
前記出力手段に出力された逸脱した旨を表すメッセージに応答して、前記直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、
前記経路探索部は、前記入力手段から前記直近の経由地を経由しない旨の指示が入力された場合、前記自車位置検出部が検出した自車の位置と進行方向とに従って、前記直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索することを特徴とするナビゲーション装置。
【請求項2】
経由地および目的地を設定する設定手段と、
前記設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、
前記経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、
自車の位置と進行方向とを検出する自車位置検出部と、
前記誘導案内部において前記自車が直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、
前記出力手段に出力された逸脱した旨を表すメッセージに応答して、前記直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、
前記出力手段は、前記入力手段から前記直近の経由地を経由しない旨の指示が入力された場合、前記設定手段で設定された経由地の一覧を表す経由地リストを出力し、
前記入力手段は、前記出力手段に出力された経由地リストに応答して、前記設定された各経由地を経由するか否かの指示を入力し、
前記経路探索部は、前記入力手段の入力に従って新たな経路を再探索することを特徴とするナビゲーション装置。
【請求項3】
前記経路探索部は、前記入力手段から前記直近の経由地を経由する旨の指示が入力された場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項4】
前記経路探索部は、前記出力手段が逸脱した旨を表すメッセージを出力している状態で、前記探索された経路から逸脱した場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1から請求項3のうちのいずれか1項記載のナビゲーション装置。
【請求項5】
前記出力手段は、前記入力手段から指示が入力された場合、出力しているメッセージを消去し、
前記経路探索部は、新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項6】
前記経路探索部は、前記誘導案内部において前記自車が前記直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していないことが判断された場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項1】
経由地および目的地を設定する設定手段と、
前記設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、
前記経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、
自車の位置と進行方向とを検出する自車位置検出部と、
前記誘導案内部において前記自車が直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、
前記出力手段に出力された逸脱した旨を表すメッセージに応答して、前記直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、
前記経路探索部は、前記入力手段から前記直近の経由地を経由しない旨の指示が入力された場合、前記自車位置検出部が検出した自車の位置と進行方向とに従って、前記直近の経由地の先に存在する経由地を経由して目的地に至る新たな経路を再探索することを特徴とするナビゲーション装置。
【請求項2】
経由地および目的地を設定する設定手段と、
前記設定手段で設定された経由地を経由して目的地に至る経路を探索する経路探索部と、
前記経路探索部で探索された経路に沿って誘導案内を行う誘導案内部と、
自車の位置と進行方向とを検出する自車位置検出部と、
前記誘導案内部において前記自車が直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していることが判断された場合、逸脱した旨を表すメッセージを出力する出力手段と、
前記出力手段に出力された逸脱した旨を表すメッセージに応答して、前記直近の経由地を経由するかどうかの指示を入力する入力手段とを備え、
前記出力手段は、前記入力手段から前記直近の経由地を経由しない旨の指示が入力された場合、前記設定手段で設定された経由地の一覧を表す経由地リストを出力し、
前記入力手段は、前記出力手段に出力された経由地リストに応答して、前記設定された各経由地を経由するか否かの指示を入力し、
前記経路探索部は、前記入力手段の入力に従って新たな経路を再探索することを特徴とするナビゲーション装置。
【請求項3】
前記経路探索部は、前記入力手段から前記直近の経由地を経由する旨の指示が入力された場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項4】
前記経路探索部は、前記出力手段が逸脱した旨を表すメッセージを出力している状態で、前記探索された経路から逸脱した場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1から請求項3のうちのいずれか1項記載のナビゲーション装置。
【請求項5】
前記出力手段は、前記入力手段から指示が入力された場合、出力しているメッセージを消去し、
前記経路探索部は、新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【請求項6】
前記経路探索部は、前記誘導案内部において前記自車が前記直近の経由地に至る経路から所定距離以上逸脱して前記直近の経由地より先に存在する経路上に位置していないことが判断された場合、前記直近の経由地を経由して目的地に至る新たな経路を再探索することを特徴とする請求項1または請求項2記載のナビゲーション装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6−1】

【図6−2】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6−1】
【図6−2】
【図7】
【公開番号】特開2011−257424(P2011−257424A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2011−176636(P2011−176636)
【出願日】平成23年8月12日(2011.8.12)
【分割の表示】特願2010−505280(P2010−505280)の分割
【原出願日】平成21年1月14日(2009.1.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成23年8月12日(2011.8.12)
【分割の表示】特願2010−505280(P2010−505280)の分割
【原出願日】平成21年1月14日(2009.1.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]