
ナビゲーション装置
【課題】車両が走行している車線をより確実に推定することができるナビゲーション装置を提供する。
【解決手段】車両の現在地を検出する現在地検出装置14と、道路画像を記憶するデータ記憶装置110と、車両が走行している車線を撮像する撮像カメラ19と、データ記憶装置110によって記憶された分岐点ガイド画像の中から現在地検出装置14によって検出された現在地に対応する分岐点ガイド画像を読み出し、読み出された分岐点ガイド画像から道路標示を抽出し、撮像カメラ19によって撮像された車両前方道路実画像から道路標示を抽出し、抽出された道路標示を比較することにより、車両の自車位置を推定する制御回路11とを備える。
【解決手段】車両の現在地を検出する現在地検出装置14と、道路画像を記憶するデータ記憶装置110と、車両が走行している車線を撮像する撮像カメラ19と、データ記憶装置110によって記憶された分岐点ガイド画像の中から現在地検出装置14によって検出された現在地に対応する分岐点ガイド画像を読み出し、読み出された分岐点ガイド画像から道路標示を抽出し、撮像カメラ19によって撮像された車両前方道路実画像から道路標示を抽出し、抽出された道路標示を比較することにより、車両の自車位置を推定する制御回路11とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が走行している車線を推定することができるナビゲーション装置に関する。
【背景技術】
【0002】
道路を撮影した画像に基づいて車両が走行している車線を認識するナビゲーション装置が従来技術として知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−276642号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
道路によって道路標示が異なるので、車両が走行している車線を推定できない場合がある。すなわち、撮像カメラによる車線の推定は信頼性の点で改善する余地がある。
【課題を解決するための手段】
【0005】
請求項1の発明のナビゲーション装置は、車両の現在地を検出する現在地検出手段と、予め特定した複数の特定道路地点における車両前方道路を表す画像データ(車両前方道路画像データ)をそれぞれ記憶する道路画像記憶手段と、前記現在地検出手段によって検出された現在地が前記特定道路地点に接近すると、前記道路画像記憶手段から対応する車両前方道路画像データを読み出す道路画像取得手段と、前記読み出された車両前方道路画像データに基づいて前記車両前方道路画像を表示モニタに表示する表示制御手段と、前記道路画像取得手段によって読み出された車線前方道路画像データに対して画像処理を施して、車両前方道路画像に含まれる道路標示を抽出する第1の抽出手段と、前記車両が走行している道路の車両前方を撮像する撮像手段と、前記撮像手段によって撮像されて取得した車両前方道路実画像データから道路標示を抽出する第2の抽出手段と、前記第1の抽出手段で抽出した道路標示と前記第2の抽出手段で抽出した道路標示とを比較して、前記車両の自車位置を推定する推定手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、カメラで撮像した車両前方道路実画像による自車位置推定処理の信頼性が向上する。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態のおけるナビゲーション装置の構成を示すブロック図である。
【図2】本発明の一実施形態における走行車線推定処理を説明するためのフローチャートである。
【図3】本発明の一実施形態における分岐点ガイド画像の特徴の抽出処理を説明するための図である。
【図4】本発明の一実施形態における分岐点ガイド画像の特徴の抽出処理を説明するための図である。
【発明を実施するための形態】
【0008】
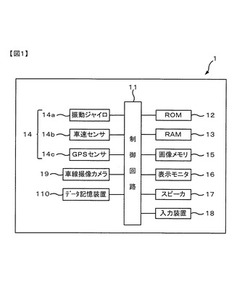
図1は、本発明の一実施形態のナビゲーション装置1の構成を示す。このナビゲーション装置1は、車線撮像カメラで撮影した車線の画像(以下、車線画像と呼ぶ)を、予め作成された道路の画像と照合して、車両が走行している車線を推定する。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、撮像カメラ19およびデータ記憶装置110を有する。
【0009】
制御回路11は、マイクロプロセッサおよびその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。また、制御回路11は、データ記憶装置110に記憶された地図データに基づいて所定の経路探索処理を行う。そして、その処理結果が推奨経路として表示モニタ16に表示される。
【0010】
制御回路11は、車両前方道路を撮像する撮像カメラ19から出力される撮像信号を入力して車両前方道路実画像を生成する。制御回路11は、車両前方道路実画像の画像データに対し画像処理を施し、車両前方道路に標示されている車線の道路標示(区画線を含む)の特徴を抽出することにより、道路標示を認識する。たとえば、路面の輝度よりも高い輝度を有する道路標示のエッジを抽出して、その抽出したエッジに基づいて車線の道路標示を認識する。また、後述する分岐点ガイド画像から道路標示を抽出する。
【0011】
現在地検出装置14は車両の位置を検出する装置である。現在地検出装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲や経路探索開始点などを決定する。また、地図上の現在地を自車位置マークで表示する。
【0012】
なお、周知のマップマッチング処理により、順次検出した複数の現在地を接続した線分の形状や方向を、地図データ上の道路形状や道路方位と比較して、自車位置を正しい道路上に設定する。とくに、優先道路と比較的浅い角度で分岐するY字路のような分岐点、あるいは、高速道路におけるジャンクションなどの分岐点では、自車位置を本線や優先道路上に設定するか、分岐路上に設定するかの処理を誤ることがある。そこで、本発明のように、カメラ前方の道路を撮像する撮像カメラを設け、画像処理により自車位置設定精度を向上するシステムが採用される。
【0013】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはデータ記憶装置110に記憶された地図データに基づいて、制御回路11において適宜生成される。
【0014】
データ記憶装置110は、フラッシュメモリやハードディスクなどの書き換え可能な不揮発性メモリや不揮発性記録媒体によって構成され、地図データを記憶する。
【0015】
地図データは、地図表示用データ、経路探索用データ、分岐点ガイド画像データを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。分岐点ガイド画像データにより、高速道路のジャンクションなど道路の分岐点を立体的に示した分岐点ガイド画像を表示モニタ16に表示することができる。ユーザが分岐点の誤った方向に進行しないようにするため、車両が道路の分岐点に接近すると、その分岐点の分岐点ガイド画像が表示モニタ16に表示される。ナビゲーション装置1は、データ記憶装置110以外の他の記録メディア、たとえばDVD−ROMやCD−ROMなどから地図データを読み出してもよい。
【0016】
表示モニタ16は、地図データなどの各種情報に基づいて、現在地付近の地図などの各種情報を表示する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドの設定や検索条件の入力などするための操作キーを有し、操作パネル上のボタンスイッチやパネル周囲のハードスイッチなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0017】
目的地がユーザにより設定されると、ナビゲーション装置1は現在地検出装置14により検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、他の道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。また、ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。
【0018】
撮像カメラ19は、車両20の前部に設けられ、車両前方の車線を撮像する。そして、撮像カメラ19は撮像した車線画像を制御回路11に出力する。
【0019】
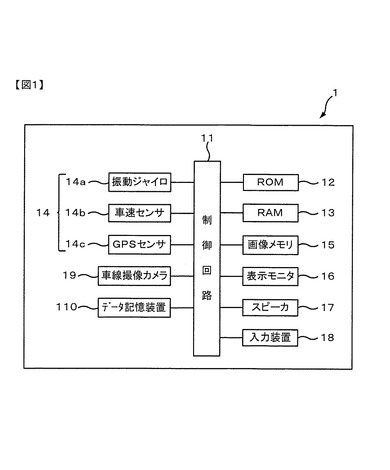
次に、図2のフローチャートを参照して、本発明の一実施形態におけるナビゲーション装置の走行車線推定処理を説明する。図2の処理は、車両のイグニッションスイッチがオンされるとスタートするプログラムにより、制御回路11において実行される。
【0020】
ステップS101では、現在地検出装置14を使用して車両の現在地を検出する。ステップS102では、ステップS101で検出した車両の現在地に基づいて、車両が道路の分岐点から所定距離手前に接近したか否かを判定する。車両が道路の分岐点から所定距離手前に接近した場合はステップS102が肯定判定され、ステップS103へ進む。車両が道路の分岐点から所定距離手前にまだ接近していない場合はステップS102が否定判定され、ステップS101に戻る。
【0021】
ステップS103では、車両が接近する道路の分岐点の分岐点ガイド画像をデータ記憶装置110から読み出し、表示モニタ16に分岐点ガイド画像を表示する。ステップS104では、分岐点ガイド画像に対して道路標示を抽出するための画像処理を施す。この画像処理は、道路標示と道路路面をそれぞれ表す色彩の明暗の相違により道路標示を抽出するものであり、公知の画像処理を採用することができる。したがって、詳細説明は省略する。この画像処理により、道路標示を抽出し、自車両が走行している本線道路から見た分岐路の方向を判定する。道路標示として、たとえば、本線・分岐路分離線、車線境界線、左端路側線、右端路側線などの道路標示を分岐点ガイド画像から抽出する。
【0022】
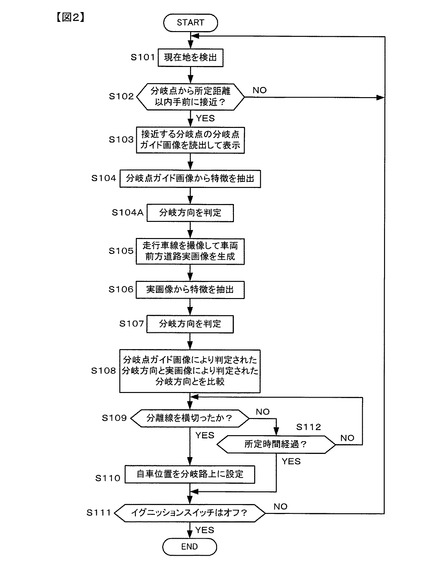
図3および図4を参照して、分岐点ガイド画像に基づく道路標示の特徴抽出処理を説明する。図3(a)は分岐点ガイド画像の一例を示す図である。分岐点ガイド画像20では、2車線の本線道路に対して、左側に分岐道路が分岐している。図3(b)に示すように、この分岐点ガイド画像20の下3分の1の領域21の画像データについて画像処理を行い、車線の道路標示を認識する。すなわち、道路標示を認識した領域を左右に3等分した領域22a〜22cについてそれぞれ、分岐点ガイド画像20に含まれる道路標示の特徴を抽出する。図3(b)の左側の領域22aでは、実線で示す分岐路の左端路側線23aと、1つのセグメントが幅広の破線で示す本線・分岐路分離線23bとが抽出される。図3(b)の中央の領域22bでは、1つのセグメントが幅狭の破線で示す車線境界線23cが抽出される。図3(b)の右側の領域22cでは、実線で示す本線の右端路側線23dが抽出される。
【0023】
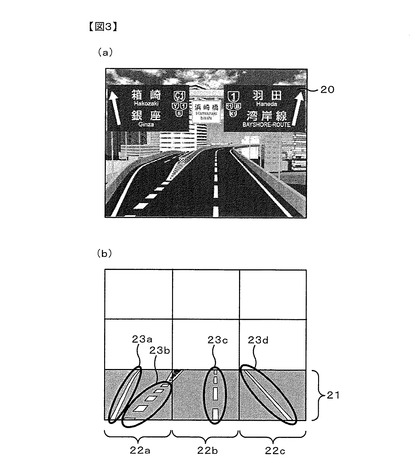
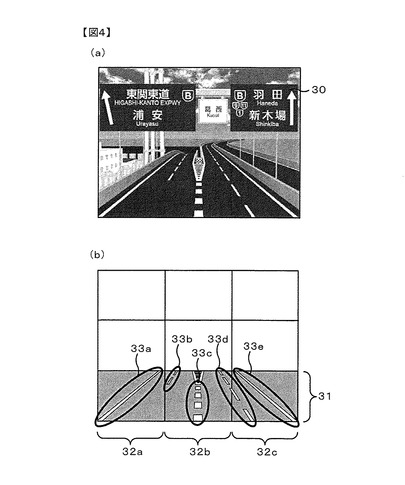
図4(a)は分岐点ガイド画像の他の例を示す図である。分岐点ガイド画像30では、2車線の本線道路に対して、左側に分岐道路が分岐している。図4(b)に示すように、図3(b)と同様にこの分岐点ガイド画像30の下3分の1の領域31の画像データについて画像処理を行い、車線の道路標示を認識する。すなわち、図3(b)と同様に道路標示を認識した領域を左右に3等分した領域32a〜32cについてそれぞれ、分岐点ガイド画像30に含まれる道路標示の特徴を抽出する。図4(b)の左側の領域32aでは、実線で示す分岐路での左端路側線33aが抽出される。図4(b)の中央の領域32bでは、1つのセグメントが幅狭の破線で示す分岐路の車線境界線33bと、1つのセグメントが幅広の破線で示す本線・分岐路分離線33cとが抽出される。図4(b)の領域32cでは、1つのセグメントが幅狭の破線で示す本線の車線境界線33dと、実線で示す本線での右端路側線33eとが抽出される。なお、領域32aでは、本線の車線境界線33dも抽出されている。
【0024】
ステップS104Aでは、上述した図3(b)や図4(b)に示すように、左右方向に3等分した分岐ガイド画像の3つの領域のいずれの領域で本線・分岐路分離線が抽出されたかを判定することにより、本線道路に対して分岐する分岐道路の分岐方向を判定する。図3(b)に示すように、左側の領域22aで本線・分岐路分離線が抽出された場合、分岐道路の分岐方向を左側と判定する。右側の領域22cで本線・分岐路分離線が抽出された場合、分岐道路の分岐方向を左側と判定する。
なお、図4(b)に示すように、中央の領域で本線・分岐路分離線が抽出された場合、後述するように撮像カメラ19による車両前方道路実画像に基づいて分岐路方向を決定する。
【0025】
このように分岐点ガイド画像に基づいて分岐路方向を算出した後、図2のステップS105に進み、撮像カメラ19から撮像信号を取り込み、車両が走行している道路の前方道路の実画像(車両前方道路実画像)を生成する。ステップS106では、ステップS105において生成された車両前方道路実画像の画像データから道路標示を抽出する。具体的には、分岐点ガイド画像に対する画像処理と同様な画像処理を実画像に施し、本線・分岐路分離線、車線境界線、左端路側線、右端路側線などの道路標示を車両前方道路実画像から抽出する。
【0026】
ステップS107では、分岐点ガイド画像に対する画像処理と同様に、左右方向に3等分した車両前方道路実画像の3つの領域のいずれの領域で本線・分岐路分離線が抽出されたかを判定して分岐方向を判定する。その判定処理は分岐点ガイド画像と同様であり、説明を省略する。
【0027】
なお、図4(b)に示すように、分岐点ガイド画像により、中央の領域で本線・分岐路分離線が抽出された場合、撮像カメラ19の撮像信号から生成した車両前方道路実画像に基づいて自車両の走行車線を決定した後、分岐道路の分岐方向を判定する。車両前方道路実画像に基づいて車両が本線・分岐路分離線の右側の車線を走行していると判定される場合は、分岐道路の分岐方向を左側と判定し、車両前方道路実画像に基づいて車両が本線・分岐路分離線の左側の車線を走行していると判定される場合は、分岐道路の分岐方向を右側と判定する。
【0028】
ステップS108では、分岐点ガイド画像から得られた分岐点の分岐方向と、車両前方道路実画像から得られた分岐点の分岐方向とを比較し、撮像カメラ19の撮像信号で生成した車両前方道路実画像に基づいて判定した分岐点の分岐方向の信頼性(確からしさ)を判定する。たとえば、分岐点ガイド画像が図3(a)で示す場合、本線・分岐路分離線が左側の領域22aに現れているので、分岐ガイド画像での分岐点の分岐方向は左方向である。このとき、車両前方道路実画像で判定された分岐点の分岐方向が左方向であれば、撮像カメラ19で撮像して取得した車両前方道路実画像による分岐点の分岐方向の信頼性が高いと判定する。反対に、車両前方道路実画像で判定された分岐点の分岐方向が右方向であれば、撮像カメラ19で撮像して取得した車両前方道路実画像による分岐点の分岐方向の信頼性が低いと判定する。
【0029】
ステップS109では、撮像カメラ19から撮像信号を入力して車両前方道路実画像を生成し、実画像に基づいて本線・分岐路分離線を車両が横切ったか否かを判定する。この場合も、車両前方道路実画像の下1/3領域の画像データに対して画像処理を行うことにより、制御回路11のプロセッサの負荷を低減できる。本線・分岐路分離線を車両が横切ったと判定されると、車両が分岐路に進入したと判定し、ステップS110に進み、自車位置決定処理における自車位置を分岐路上に設定する。上述したマップマッチングによる自車位置決定処理よりも、画像処理による自車位置設定処理を優先させる。その後、ステップS111に進み、イグニションスイッチがオフであれば図2の処理を終了し、イグニションスイッチがオフでなければステップS101へ戻る。
【0030】
本線・分岐路分離線を車両が横切ったと判定されない場合はステップS112へ進み、ステップS109へ進んでから所定時間が経過したか否かを判定する。所定時間が経過するまではステップS109に戻り、所定時間経過するとステップS111に進む。ステップS112で所定時間経過が判定される場合は、車両が分岐点に進入せず本線を走行しているとみなし、自車位置は本線上に設定したままとする。そして、その後の車両前方道路実画像による分岐点の分岐方向の確からしさの検証処理を停止する。この場合、実画像を用いた自車位置設定処理が禁止される。
【0031】
以上の実施の形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)撮像カメラの撮像信号に基づいて車両前方道路実画像を生成し、その実画像に基づいて道路標示を抽出する一方、分岐点ガイド画像のように予めナビゲーション装置内に作成されている道路前方画像に基づいて道路標示を抽出する。そして、2つの道路標示を比較して車線を推定するようにした。したがって、車両前方道路実画像による自車位置推定処理の信頼性を向上させることができる。
【0032】
(2)車両前方道路画像の下方領域の画像に対して画像処理を施して道路標示を抽出するようにした。したがって、画像処理時間を短縮化することができ、ナビゲーション装置の制御回路11に高パフォーマンスのプロセッサを使用する必要がなく、コスト面で有利である。
【0033】
(3)車両前方道路画像がジャンクションなどの分岐点ガイド画像のとき、分岐点ガイド画像に基づいて分岐点の分岐方向を演算するとともに、撮像カメラ19による車両前方道路実画像に基づいて分岐点の分岐方向を演算する。これら2つの分岐点の分岐方向の一致、不一致を判定する。そして、2つの分岐方向が一致していると判定された場合、撮像カメラ19から撮像信号を取り込んで、本線・分岐路分離線を車両が横切ったか否かを判定する。車両を分離線を横切っている場合、車両が分岐点に進入しているので、自車位置を分岐路上に設定する。このように、撮像カメラ19による車両前方道路実画像による分岐路の分岐方向が分岐点ガイド画像で求めた分岐方向と一致し、実画像によって車両が分離線を横切たことが判定されると、車両の位置を分岐路上に設定するようにした。また、撮像カメラによる車両前方道路実画像による分岐路の分岐方向が分岐点ガイド画像で求めた分岐方向と一致しない場合は、実画像によって車両が分離線を横切たことが判定されたとしても、車両の位置を分岐路上に設定しないようにした。すなわち、2つの分岐方向が一致していないと判定された場合、カメラを利用したマップマッチングにて、自車位置を分岐路上に設定する処理を禁止するようにした。したがって、自車位置を確実に分岐路上に設定することができる。
【0034】
(4)車両前方道路実画像の下方領域の画像に対して画像処理を施して道路標示を抽出するようにした。したがって、画像処理時間を短縮化することができ、ナビゲーション装置の制御回路11に高パフォーマンスのプロセッサを使用する必要がなく、コスト面で有利である。
【0035】
(5)分岐点ガイド画像と、撮像カメラでによる車両前方道路実画像とにより分岐路の分岐方向を算出するにあたり、画像を左右方向に3等分し、3等分された画像の中で左側の画像または右側の画像に分岐点と本線を分離する分離線(分岐点・本線分離線)があることを認識した場合は、それらの認識結果に基づいて分岐道路の分岐方向を判定するようにした。また、分岐点ガイド画像の3等分された画像の中央の画像に分岐点・本線分離線があると認識した場合は、車両前方道路実画像に基づいて演算した分岐点の分岐方向を採用するようにした。これにより分岐道路の分岐方向を簡易な画像処理により確実に演算することができる。
【0036】
本発明によるナビゲーション装置は以下のように変形して実施することができる。
(1)ナビゲーション装置1側から分岐点の分岐方向を通知されたとき、撮像カメラ19によって撮像されて取得された車両前方道路実画像の分岐方向の領域内の画像データに対して画像処理を行い、分岐点の分岐方向を演算するようにしてもよい。これにより、画像処理を行う領域を狭くすることができ、画像処理の処理時間を短縮することができる。
【0037】
(2)本発明は、分岐道路の分岐方向の確からしさの判定に限定されない。たとえば、分岐点ガイド画像による特徴抽出で得られた車両が走行する車線に関する情報と、カメラ画像による特徴抽出で得られた車両が走行する車線に関する情報とを比較し、車両が走行する車線に関する情報の確からしさを判定してもよい。
【0038】
(3)車両前方道路画像は、道路路上に表示されている道路標示を示す画像であれば、分岐点ガイド画像に限定されない。
(4)図1に示したナビゲーション装置では、撮像カメラ19から出力される撮像信号をナビゲーション装置の制御回路11に出力し、制御回路11で各種の画像処理を行って道路標示を抽出するようにした。しかし、車線撮影カメラ19の撮像信号をナビゲーション装置とは別の画像処理回路に入力して道路標示を抽出し。その抽出結果を制御回路11に入力するように構成してもよい。この場合、分岐点ガイド画像に対する道路標示抽出の画像処理も、この専用の画像処理回路で行うようにしてもよい。これにより、ナビゲーション装置の制御回路11の処理能力を向上させずに本発明を適用することがえきる。
【0039】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0040】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0041】
1 ナビゲーション装置 11 制御回路
14 現在地検出装置 19 車線撮像カメラ
20,30 分岐点ガイド画像 23a,23d、33a,33e 路側線
23b,33c 本線 23c,33b,33d 車線境界線
110 データ記憶装置
【技術分野】
【0001】
本発明は、車両が走行している車線を推定することができるナビゲーション装置に関する。
【背景技術】
【0002】
道路を撮影した画像に基づいて車両が走行している車線を認識するナビゲーション装置が従来技術として知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−276642号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
道路によって道路標示が異なるので、車両が走行している車線を推定できない場合がある。すなわち、撮像カメラによる車線の推定は信頼性の点で改善する余地がある。
【課題を解決するための手段】
【0005】
請求項1の発明のナビゲーション装置は、車両の現在地を検出する現在地検出手段と、予め特定した複数の特定道路地点における車両前方道路を表す画像データ(車両前方道路画像データ)をそれぞれ記憶する道路画像記憶手段と、前記現在地検出手段によって検出された現在地が前記特定道路地点に接近すると、前記道路画像記憶手段から対応する車両前方道路画像データを読み出す道路画像取得手段と、前記読み出された車両前方道路画像データに基づいて前記車両前方道路画像を表示モニタに表示する表示制御手段と、前記道路画像取得手段によって読み出された車線前方道路画像データに対して画像処理を施して、車両前方道路画像に含まれる道路標示を抽出する第1の抽出手段と、前記車両が走行している道路の車両前方を撮像する撮像手段と、前記撮像手段によって撮像されて取得した車両前方道路実画像データから道路標示を抽出する第2の抽出手段と、前記第1の抽出手段で抽出した道路標示と前記第2の抽出手段で抽出した道路標示とを比較して、前記車両の自車位置を推定する推定手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、カメラで撮像した車両前方道路実画像による自車位置推定処理の信頼性が向上する。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態のおけるナビゲーション装置の構成を示すブロック図である。
【図2】本発明の一実施形態における走行車線推定処理を説明するためのフローチャートである。
【図3】本発明の一実施形態における分岐点ガイド画像の特徴の抽出処理を説明するための図である。
【図4】本発明の一実施形態における分岐点ガイド画像の特徴の抽出処理を説明するための図である。
【発明を実施するための形態】
【0008】
図1は、本発明の一実施形態のナビゲーション装置1の構成を示す。このナビゲーション装置1は、車線撮像カメラで撮影した車線の画像(以下、車線画像と呼ぶ)を、予め作成された道路の画像と照合して、車両が走行している車線を推定する。ナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、スピーカ17、入力装置18、撮像カメラ19およびデータ記憶装置110を有する。
【0009】
制御回路11は、マイクロプロセッサおよびその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行して各種の制御を行う。また、制御回路11は、データ記憶装置110に記憶された地図データに基づいて所定の経路探索処理を行う。そして、その処理結果が推奨経路として表示モニタ16に表示される。
【0010】
制御回路11は、車両前方道路を撮像する撮像カメラ19から出力される撮像信号を入力して車両前方道路実画像を生成する。制御回路11は、車両前方道路実画像の画像データに対し画像処理を施し、車両前方道路に標示されている車線の道路標示(区画線を含む)の特徴を抽出することにより、道路標示を認識する。たとえば、路面の輝度よりも高い輝度を有する道路標示のエッジを抽出して、その抽出したエッジに基づいて車線の道路標示を認識する。また、後述する分岐点ガイド画像から道路標示を抽出する。
【0011】
現在地検出装置14は車両の位置を検出する装置である。現在地検出装置14は、振動ジャイロ14a、車速センサ14b、GPS(Global Positioning System)センサ14cなどからなる。振動ジャイロ14aは車両の進行方向を検出し、車速センサ14bは車速を検出し、GPSセンサ14cはGPS衛星からのGPS信号を検出する。ナビゲーション装置1は、この現在地検出装置14により検出された車両の現在地に基づいて、地図の表示範囲や経路探索開始点などを決定する。また、地図上の現在地を自車位置マークで表示する。
【0012】
なお、周知のマップマッチング処理により、順次検出した複数の現在地を接続した線分の形状や方向を、地図データ上の道路形状や道路方位と比較して、自車位置を正しい道路上に設定する。とくに、優先道路と比較的浅い角度で分岐するY字路のような分岐点、あるいは、高速道路におけるジャンクションなどの分岐点では、自車位置を本線や優先道路上に設定するか、分岐路上に設定するかの処理を誤ることがある。そこで、本発明のように、カメラ前方の道路を撮像する撮像カメラを設け、画像処理により自車位置設定精度を向上するシステムが採用される。
【0013】
画像メモリ15は、表示モニタ16に表示するための画像データを格納する。この画像データは道路地図描画用データや各種の図形データからなり、それらはデータ記憶装置110に記憶された地図データに基づいて、制御回路11において適宜生成される。
【0014】
データ記憶装置110は、フラッシュメモリやハードディスクなどの書き換え可能な不揮発性メモリや不揮発性記録媒体によって構成され、地図データを記憶する。
【0015】
地図データは、地図表示用データ、経路探索用データ、分岐点ガイド画像データを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有し、ユーザの要求にしたがって、表示地図の縮尺を変更することができる。分岐点ガイド画像データにより、高速道路のジャンクションなど道路の分岐点を立体的に示した分岐点ガイド画像を表示モニタ16に表示することができる。ユーザが分岐点の誤った方向に進行しないようにするため、車両が道路の分岐点に接近すると、その分岐点の分岐点ガイド画像が表示モニタ16に表示される。ナビゲーション装置1は、データ記憶装置110以外の他の記録メディア、たとえばDVD−ROMやCD−ROMなどから地図データを読み出してもよい。
【0016】
表示モニタ16は、地図データなどの各種情報に基づいて、現在地付近の地図などの各種情報を表示する。スピーカ17は、各種入力操作をユーザに指示したり、経路誘導したりするための音声を出力する。入力装置18は、ユーザが各種コマンドの設定や検索条件の入力などするための操作キーを有し、操作パネル上のボタンスイッチやパネル周囲のハードスイッチなどによって実現される。ユーザは、表示モニタ16の表示画面の指示やスピーカ17からの音声指示にしたがって入力装置18を操作することにより、目的地を設定する。
【0017】
目的地がユーザにより設定されると、ナビゲーション装置1は現在地検出装置14により検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。このようにして求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、他の道路とは区別して画面表示される。これにより、ユーザは地図上の推奨経路を画面上で認識することができる。また、ナビゲーション装置1は、推奨経路にしたがって車両が走行できるように、ユーザに対して画面や音声などによる進行方向指示を行い、車両を経路誘導する。
【0018】
撮像カメラ19は、車両20の前部に設けられ、車両前方の車線を撮像する。そして、撮像カメラ19は撮像した車線画像を制御回路11に出力する。
【0019】
次に、図2のフローチャートを参照して、本発明の一実施形態におけるナビゲーション装置の走行車線推定処理を説明する。図2の処理は、車両のイグニッションスイッチがオンされるとスタートするプログラムにより、制御回路11において実行される。
【0020】
ステップS101では、現在地検出装置14を使用して車両の現在地を検出する。ステップS102では、ステップS101で検出した車両の現在地に基づいて、車両が道路の分岐点から所定距離手前に接近したか否かを判定する。車両が道路の分岐点から所定距離手前に接近した場合はステップS102が肯定判定され、ステップS103へ進む。車両が道路の分岐点から所定距離手前にまだ接近していない場合はステップS102が否定判定され、ステップS101に戻る。
【0021】
ステップS103では、車両が接近する道路の分岐点の分岐点ガイド画像をデータ記憶装置110から読み出し、表示モニタ16に分岐点ガイド画像を表示する。ステップS104では、分岐点ガイド画像に対して道路標示を抽出するための画像処理を施す。この画像処理は、道路標示と道路路面をそれぞれ表す色彩の明暗の相違により道路標示を抽出するものであり、公知の画像処理を採用することができる。したがって、詳細説明は省略する。この画像処理により、道路標示を抽出し、自車両が走行している本線道路から見た分岐路の方向を判定する。道路標示として、たとえば、本線・分岐路分離線、車線境界線、左端路側線、右端路側線などの道路標示を分岐点ガイド画像から抽出する。
【0022】
図3および図4を参照して、分岐点ガイド画像に基づく道路標示の特徴抽出処理を説明する。図3(a)は分岐点ガイド画像の一例を示す図である。分岐点ガイド画像20では、2車線の本線道路に対して、左側に分岐道路が分岐している。図3(b)に示すように、この分岐点ガイド画像20の下3分の1の領域21の画像データについて画像処理を行い、車線の道路標示を認識する。すなわち、道路標示を認識した領域を左右に3等分した領域22a〜22cについてそれぞれ、分岐点ガイド画像20に含まれる道路標示の特徴を抽出する。図3(b)の左側の領域22aでは、実線で示す分岐路の左端路側線23aと、1つのセグメントが幅広の破線で示す本線・分岐路分離線23bとが抽出される。図3(b)の中央の領域22bでは、1つのセグメントが幅狭の破線で示す車線境界線23cが抽出される。図3(b)の右側の領域22cでは、実線で示す本線の右端路側線23dが抽出される。
【0023】
図4(a)は分岐点ガイド画像の他の例を示す図である。分岐点ガイド画像30では、2車線の本線道路に対して、左側に分岐道路が分岐している。図4(b)に示すように、図3(b)と同様にこの分岐点ガイド画像30の下3分の1の領域31の画像データについて画像処理を行い、車線の道路標示を認識する。すなわち、図3(b)と同様に道路標示を認識した領域を左右に3等分した領域32a〜32cについてそれぞれ、分岐点ガイド画像30に含まれる道路標示の特徴を抽出する。図4(b)の左側の領域32aでは、実線で示す分岐路での左端路側線33aが抽出される。図4(b)の中央の領域32bでは、1つのセグメントが幅狭の破線で示す分岐路の車線境界線33bと、1つのセグメントが幅広の破線で示す本線・分岐路分離線33cとが抽出される。図4(b)の領域32cでは、1つのセグメントが幅狭の破線で示す本線の車線境界線33dと、実線で示す本線での右端路側線33eとが抽出される。なお、領域32aでは、本線の車線境界線33dも抽出されている。
【0024】
ステップS104Aでは、上述した図3(b)や図4(b)に示すように、左右方向に3等分した分岐ガイド画像の3つの領域のいずれの領域で本線・分岐路分離線が抽出されたかを判定することにより、本線道路に対して分岐する分岐道路の分岐方向を判定する。図3(b)に示すように、左側の領域22aで本線・分岐路分離線が抽出された場合、分岐道路の分岐方向を左側と判定する。右側の領域22cで本線・分岐路分離線が抽出された場合、分岐道路の分岐方向を左側と判定する。
なお、図4(b)に示すように、中央の領域で本線・分岐路分離線が抽出された場合、後述するように撮像カメラ19による車両前方道路実画像に基づいて分岐路方向を決定する。
【0025】
このように分岐点ガイド画像に基づいて分岐路方向を算出した後、図2のステップS105に進み、撮像カメラ19から撮像信号を取り込み、車両が走行している道路の前方道路の実画像(車両前方道路実画像)を生成する。ステップS106では、ステップS105において生成された車両前方道路実画像の画像データから道路標示を抽出する。具体的には、分岐点ガイド画像に対する画像処理と同様な画像処理を実画像に施し、本線・分岐路分離線、車線境界線、左端路側線、右端路側線などの道路標示を車両前方道路実画像から抽出する。
【0026】
ステップS107では、分岐点ガイド画像に対する画像処理と同様に、左右方向に3等分した車両前方道路実画像の3つの領域のいずれの領域で本線・分岐路分離線が抽出されたかを判定して分岐方向を判定する。その判定処理は分岐点ガイド画像と同様であり、説明を省略する。
【0027】
なお、図4(b)に示すように、分岐点ガイド画像により、中央の領域で本線・分岐路分離線が抽出された場合、撮像カメラ19の撮像信号から生成した車両前方道路実画像に基づいて自車両の走行車線を決定した後、分岐道路の分岐方向を判定する。車両前方道路実画像に基づいて車両が本線・分岐路分離線の右側の車線を走行していると判定される場合は、分岐道路の分岐方向を左側と判定し、車両前方道路実画像に基づいて車両が本線・分岐路分離線の左側の車線を走行していると判定される場合は、分岐道路の分岐方向を右側と判定する。
【0028】
ステップS108では、分岐点ガイド画像から得られた分岐点の分岐方向と、車両前方道路実画像から得られた分岐点の分岐方向とを比較し、撮像カメラ19の撮像信号で生成した車両前方道路実画像に基づいて判定した分岐点の分岐方向の信頼性(確からしさ)を判定する。たとえば、分岐点ガイド画像が図3(a)で示す場合、本線・分岐路分離線が左側の領域22aに現れているので、分岐ガイド画像での分岐点の分岐方向は左方向である。このとき、車両前方道路実画像で判定された分岐点の分岐方向が左方向であれば、撮像カメラ19で撮像して取得した車両前方道路実画像による分岐点の分岐方向の信頼性が高いと判定する。反対に、車両前方道路実画像で判定された分岐点の分岐方向が右方向であれば、撮像カメラ19で撮像して取得した車両前方道路実画像による分岐点の分岐方向の信頼性が低いと判定する。
【0029】
ステップS109では、撮像カメラ19から撮像信号を入力して車両前方道路実画像を生成し、実画像に基づいて本線・分岐路分離線を車両が横切ったか否かを判定する。この場合も、車両前方道路実画像の下1/3領域の画像データに対して画像処理を行うことにより、制御回路11のプロセッサの負荷を低減できる。本線・分岐路分離線を車両が横切ったと判定されると、車両が分岐路に進入したと判定し、ステップS110に進み、自車位置決定処理における自車位置を分岐路上に設定する。上述したマップマッチングによる自車位置決定処理よりも、画像処理による自車位置設定処理を優先させる。その後、ステップS111に進み、イグニションスイッチがオフであれば図2の処理を終了し、イグニションスイッチがオフでなければステップS101へ戻る。
【0030】
本線・分岐路分離線を車両が横切ったと判定されない場合はステップS112へ進み、ステップS109へ進んでから所定時間が経過したか否かを判定する。所定時間が経過するまではステップS109に戻り、所定時間経過するとステップS111に進む。ステップS112で所定時間経過が判定される場合は、車両が分岐点に進入せず本線を走行しているとみなし、自車位置は本線上に設定したままとする。そして、その後の車両前方道路実画像による分岐点の分岐方向の確からしさの検証処理を停止する。この場合、実画像を用いた自車位置設定処理が禁止される。
【0031】
以上の実施の形態によるナビゲーション装置1は次のような作用効果を奏する。
(1)撮像カメラの撮像信号に基づいて車両前方道路実画像を生成し、その実画像に基づいて道路標示を抽出する一方、分岐点ガイド画像のように予めナビゲーション装置内に作成されている道路前方画像に基づいて道路標示を抽出する。そして、2つの道路標示を比較して車線を推定するようにした。したがって、車両前方道路実画像による自車位置推定処理の信頼性を向上させることができる。
【0032】
(2)車両前方道路画像の下方領域の画像に対して画像処理を施して道路標示を抽出するようにした。したがって、画像処理時間を短縮化することができ、ナビゲーション装置の制御回路11に高パフォーマンスのプロセッサを使用する必要がなく、コスト面で有利である。
【0033】
(3)車両前方道路画像がジャンクションなどの分岐点ガイド画像のとき、分岐点ガイド画像に基づいて分岐点の分岐方向を演算するとともに、撮像カメラ19による車両前方道路実画像に基づいて分岐点の分岐方向を演算する。これら2つの分岐点の分岐方向の一致、不一致を判定する。そして、2つの分岐方向が一致していると判定された場合、撮像カメラ19から撮像信号を取り込んで、本線・分岐路分離線を車両が横切ったか否かを判定する。車両を分離線を横切っている場合、車両が分岐点に進入しているので、自車位置を分岐路上に設定する。このように、撮像カメラ19による車両前方道路実画像による分岐路の分岐方向が分岐点ガイド画像で求めた分岐方向と一致し、実画像によって車両が分離線を横切たことが判定されると、車両の位置を分岐路上に設定するようにした。また、撮像カメラによる車両前方道路実画像による分岐路の分岐方向が分岐点ガイド画像で求めた分岐方向と一致しない場合は、実画像によって車両が分離線を横切たことが判定されたとしても、車両の位置を分岐路上に設定しないようにした。すなわち、2つの分岐方向が一致していないと判定された場合、カメラを利用したマップマッチングにて、自車位置を分岐路上に設定する処理を禁止するようにした。したがって、自車位置を確実に分岐路上に設定することができる。
【0034】
(4)車両前方道路実画像の下方領域の画像に対して画像処理を施して道路標示を抽出するようにした。したがって、画像処理時間を短縮化することができ、ナビゲーション装置の制御回路11に高パフォーマンスのプロセッサを使用する必要がなく、コスト面で有利である。
【0035】
(5)分岐点ガイド画像と、撮像カメラでによる車両前方道路実画像とにより分岐路の分岐方向を算出するにあたり、画像を左右方向に3等分し、3等分された画像の中で左側の画像または右側の画像に分岐点と本線を分離する分離線(分岐点・本線分離線)があることを認識した場合は、それらの認識結果に基づいて分岐道路の分岐方向を判定するようにした。また、分岐点ガイド画像の3等分された画像の中央の画像に分岐点・本線分離線があると認識した場合は、車両前方道路実画像に基づいて演算した分岐点の分岐方向を採用するようにした。これにより分岐道路の分岐方向を簡易な画像処理により確実に演算することができる。
【0036】
本発明によるナビゲーション装置は以下のように変形して実施することができる。
(1)ナビゲーション装置1側から分岐点の分岐方向を通知されたとき、撮像カメラ19によって撮像されて取得された車両前方道路実画像の分岐方向の領域内の画像データに対して画像処理を行い、分岐点の分岐方向を演算するようにしてもよい。これにより、画像処理を行う領域を狭くすることができ、画像処理の処理時間を短縮することができる。
【0037】
(2)本発明は、分岐道路の分岐方向の確からしさの判定に限定されない。たとえば、分岐点ガイド画像による特徴抽出で得られた車両が走行する車線に関する情報と、カメラ画像による特徴抽出で得られた車両が走行する車線に関する情報とを比較し、車両が走行する車線に関する情報の確からしさを判定してもよい。
【0038】
(3)車両前方道路画像は、道路路上に表示されている道路標示を示す画像であれば、分岐点ガイド画像に限定されない。
(4)図1に示したナビゲーション装置では、撮像カメラ19から出力される撮像信号をナビゲーション装置の制御回路11に出力し、制御回路11で各種の画像処理を行って道路標示を抽出するようにした。しかし、車線撮影カメラ19の撮像信号をナビゲーション装置とは別の画像処理回路に入力して道路標示を抽出し。その抽出結果を制御回路11に入力するように構成してもよい。この場合、分岐点ガイド画像に対する道路標示抽出の画像処理も、この専用の画像処理回路で行うようにしてもよい。これにより、ナビゲーション装置の制御回路11の処理能力を向上させずに本発明を適用することがえきる。
【0039】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0040】
以上の説明はあくまで一例であり、発明は、上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0041】
1 ナビゲーション装置 11 制御回路
14 現在地検出装置 19 車線撮像カメラ
20,30 分岐点ガイド画像 23a,23d、33a,33e 路側線
23b,33c 本線 23c,33b,33d 車線境界線
110 データ記憶装置
【特許請求の範囲】
【請求項1】
車両の現在地を検出する現在地検出手段と、
予め特定した複数の特定道路地点における車両前方道路を表す画像データ(車両前方道路画像データ)をそれぞれ記憶する道路画像記憶手段と、
前記現在地検出手段によって検出された現在地が前記特定道路地点に接近すると、前記道路画像記憶手段から対応する車両前方道路画像データを読み出す道路画像取得手段と、
前記読み出された車両前方道路画像データに基づいて前記車両前方道路画像を表示モニタに表示する表示制御手段と、
前記道路画像取得手段によって読み出された車線前方道路画像データに対して画像処理を施して、車両前方道路画像に含まれる道路標示を抽出する第1の抽出手段と、
前記車両が走行している道路の車両前方を撮像する撮像手段と、
前記撮像手段によって撮像されて取得した車両前方道路実画像データから道路標示を抽出する第2の抽出手段と、
前記第1の抽出手段で抽出した道路標示と前記第2の抽出手段で抽出した道路標示とを比較して、前記車両の自車位置を推定する車線推定手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記第1および第2の抽出手段は、本線と分岐点とを分離する本線・分岐路分離線を抽出し、前記第1および第2の分岐方向判定手段は、抽出された本線・分岐路分離線に基づいて前記分岐点の分岐方向を判定することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記第1の抽出手段で抽出した道路標示に基づいて、分岐点の分岐方向を判定する第1の分岐方向判定手段と、
前記第2の抽出手段で抽出した道路標示に基づいて、分岐点の分岐方向を判定する第2の分岐方向判定手段と、
前記第1の分岐方向判定手段で判定した分岐点の分岐方向と、第2の分岐方向判定手段で判定した分岐点の分岐方向との一致、不一致を判定する一致判定手段とを備え、
前記推定手段は、前記一致判定手段により2つの分岐方向が一致していると判定された場合、前記撮像手段から撮像信号を取り込んで、前記本線・分岐路分離線を横切ったか否かを判定し、横切っている場合、自車位置を分岐路上に設定する自車位置設定手段を含むことを特徴とするナビゲーション装置。
【請求項4】
請求項3のナビゲーション装置において、
前記第1の抽出手段は、前記読み出した前記車両前方道路画像の下方領域の画像データに対して画像処理を施し、前記第2の抽出手段は、前記取得した前記車両前方道路実画像の下方領域の画像データに対して画像処理を施すことを特徴とするナビゲーション装置。
【請求項5】
請求項4に記載のナビゲーション装置において、
前記第1および第2の分岐方向判定手段のそれぞれは、前記下方領域の画像データの画像処理を施すにあたり、前記下方領域の画像を左右方向に3等分し、前記3等分された画像の左側の画像から前記本線・分岐路分離線が抽出されたときは、分岐方向は左側と判定し、前記3等分された画像の右側の画像から前記本線・分岐路分離線が抽出されたときは、分岐方向は右側と判定し、
前記第1の分岐方向判定手段は、前記3等分された画像の中央の画像から前記本線・分岐路分離線が得られたときは、前記第2の分岐方向判定手段で判定した分岐方向を分岐点の分岐方向と認識することを特徴とするナビゲーション装置。
【請求項6】
請求項2乃至5のいずれか1項に記載のナビゲーション装置において、
前記自車位置設定手段は、前記撮像手段から取り込んで生成した前記車両前方道路実画像の下方領域の画像データに対して画像処理を施し、前記本線・分岐路分離線を横切ったか否かを判定することを特徴とするナビゲーション装置。
【請求項7】
請求項2乃至6項のいずれか1項に記載のナビゲーション装置において、
前記一致判定手段により2つの分岐方向が一致していないと判定された場合、前記自車位置設定手段の処理を禁止する禁止手段をさらに備えることを特徴とするナビゲーション装置。
【請求項1】
車両の現在地を検出する現在地検出手段と、
予め特定した複数の特定道路地点における車両前方道路を表す画像データ(車両前方道路画像データ)をそれぞれ記憶する道路画像記憶手段と、
前記現在地検出手段によって検出された現在地が前記特定道路地点に接近すると、前記道路画像記憶手段から対応する車両前方道路画像データを読み出す道路画像取得手段と、
前記読み出された車両前方道路画像データに基づいて前記車両前方道路画像を表示モニタに表示する表示制御手段と、
前記道路画像取得手段によって読み出された車線前方道路画像データに対して画像処理を施して、車両前方道路画像に含まれる道路標示を抽出する第1の抽出手段と、
前記車両が走行している道路の車両前方を撮像する撮像手段と、
前記撮像手段によって撮像されて取得した車両前方道路実画像データから道路標示を抽出する第2の抽出手段と、
前記第1の抽出手段で抽出した道路標示と前記第2の抽出手段で抽出した道路標示とを比較して、前記車両の自車位置を推定する車線推定手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記第1および第2の抽出手段は、本線と分岐点とを分離する本線・分岐路分離線を抽出し、前記第1および第2の分岐方向判定手段は、抽出された本線・分岐路分離線に基づいて前記分岐点の分岐方向を判定することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記第1の抽出手段で抽出した道路標示に基づいて、分岐点の分岐方向を判定する第1の分岐方向判定手段と、
前記第2の抽出手段で抽出した道路標示に基づいて、分岐点の分岐方向を判定する第2の分岐方向判定手段と、
前記第1の分岐方向判定手段で判定した分岐点の分岐方向と、第2の分岐方向判定手段で判定した分岐点の分岐方向との一致、不一致を判定する一致判定手段とを備え、
前記推定手段は、前記一致判定手段により2つの分岐方向が一致していると判定された場合、前記撮像手段から撮像信号を取り込んで、前記本線・分岐路分離線を横切ったか否かを判定し、横切っている場合、自車位置を分岐路上に設定する自車位置設定手段を含むことを特徴とするナビゲーション装置。
【請求項4】
請求項3のナビゲーション装置において、
前記第1の抽出手段は、前記読み出した前記車両前方道路画像の下方領域の画像データに対して画像処理を施し、前記第2の抽出手段は、前記取得した前記車両前方道路実画像の下方領域の画像データに対して画像処理を施すことを特徴とするナビゲーション装置。
【請求項5】
請求項4に記載のナビゲーション装置において、
前記第1および第2の分岐方向判定手段のそれぞれは、前記下方領域の画像データの画像処理を施すにあたり、前記下方領域の画像を左右方向に3等分し、前記3等分された画像の左側の画像から前記本線・分岐路分離線が抽出されたときは、分岐方向は左側と判定し、前記3等分された画像の右側の画像から前記本線・分岐路分離線が抽出されたときは、分岐方向は右側と判定し、
前記第1の分岐方向判定手段は、前記3等分された画像の中央の画像から前記本線・分岐路分離線が得られたときは、前記第2の分岐方向判定手段で判定した分岐方向を分岐点の分岐方向と認識することを特徴とするナビゲーション装置。
【請求項6】
請求項2乃至5のいずれか1項に記載のナビゲーション装置において、
前記自車位置設定手段は、前記撮像手段から取り込んで生成した前記車両前方道路実画像の下方領域の画像データに対して画像処理を施し、前記本線・分岐路分離線を横切ったか否かを判定することを特徴とするナビゲーション装置。
【請求項7】
請求項2乃至6項のいずれか1項に記載のナビゲーション装置において、
前記一致判定手段により2つの分岐方向が一致していないと判定された場合、前記自車位置設定手段の処理を禁止する禁止手段をさらに備えることを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−52997(P2011−52997A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−199956(P2009−199956)
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年8月31日(2009.8.31)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]