
ナビゲーション装置

【課題】車速算出に用いる距離係数の学習中の現在位置の算出精度の劣化を抑制する「ナビゲーション装置」を提供する。
【解決手段】車速パルス信号のパルスを距離に換算するための距離係数が真値に安定せず正しく車速センサ106で車速を測定できない距離係数の学習中は、車速センサ106の測定する車速を用いずに現在位置を算出する。また、距離係数の学習が完了して正しく車速が車速センサ106において測定できるようになった後は、車速センサ106の測定する車速を考慮に含めて現在位置をより信頼性高く算出する(a)。
【解決手段】車速パルス信号のパルスを距離に換算するための距離係数が真値に安定せず正しく車速センサ106で車速を測定できない距離係数の学習中は、車速センサ106の測定する車速を用いずに現在位置を算出する。また、距離係数の学習が完了して正しく車速が車速センサ106において測定できるようになった後は、車速センサ106の測定する車速を考慮に含めて現在位置をより信頼性高く算出する(a)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を算出するナビゲーション装置に関するものである。
【背景技術】
【0002】
自動車に搭載されたナビゲーション装置における現在位置算出の技術としては、GPS受信機による衛星測位で求めた衛星航法位置と、車速センサやジャイロセンサや加速度センサを用いて求めた推測航法位置との双方を用いて現在位置を算出する技術が知られている(たとえば、特許文献1)。
【0003】
ここで、このような自律航法位置の算出に用いられる車速センサに関する技術としては、車輪の所定回転角度毎に出力される車速パルス数に、1車速パルスあたりの移動距離を表す距離係数を乗じて求めた移動距離より車速を検出する技術が知られている。
また、このような距離係数の設定の技術としては、GPS受信機で算出した移動距離と、車速センサで車速パルス数に距離係数を乗じて求めた移動距離とが一致するように、距離係数を、当該距離係数が安定するまで学習して設定する技術が知られている(たとえば、特許文献2、3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63-26530号公報
【特許文献2】特開2005-147785号公報
【特許文献3】特開2005-189010号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した距離係数を学習して設定する技術によれば、学習が完了するまでは距離係数として正しい値が設定されないために、車速センサにおいて車速を正しく算出することができない。そして、このために、車速センサを用いて推測航法位置を正しく算出できずに、結果的に、誤った現在位位置が算出されてしまうことが生じ得る。
【0006】
そこで、本発明は、距離係数の学習中の現在位置の算出精度の劣化を抑制することを課題とする。
【課題を解決するための手段】
【0007】
前記課題達成のために、本発明は、現在位置を算出するナビゲーション装置に、地図データを記憶した地図記憶部と、自動車の車輪が所定回転角度回転する毎にパルスが出現する車速パルス信号の単位時間あたりのパルス出現数に、設定された距離係数を乗じて車速を検出する車速センサと、前記自動車の角速度を検出するジャイロセンサと、前記自動車の加速度を検出する加速度センサと、衛星測位により前記自動車の位置を算出するGPS受信機と、前記GPS受信機が算出した前記自動車の位置の移動量と、前記車速センサが検出した車速より求まる前記自動車の位置の移動量とが一致するように、前記距離係数を学習し、学習した距離係数を前記車速センサに設定する距離係数学習手段と、前記自動車の現在位置を算出する現在位置算出手段とを備え、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データとに少なくとも基づいて前記現在位置を算出し、前記距離係数学習手段が前記距離係数の学習を行っている期間中は、前記GPS受信機が算出した前記自動車の位置と、前記ジャイロセンサが検出した角速度と、前記加速度センサが検出した加速度と、前記地図データとに少なくとも基づき、かつ、前記車速センサが検出した車速に基づかずに前記現在位置を算出するようにしたものである。
【0008】
ここで、このようなナビゲーション装置は、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データに加えて前記加速度センサが検出した加速度を用いて、前記現在位置を算出するように構成してもよい。
【0009】
また、このようなナビゲーション装置は、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度とを少なくとも用いて推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出し、前記距離係数学習手段が前記距離係数の学習を行っている期間中は、前記ジャイロセンサが検出した角速度と前記加速度センサが検出した加速度とを用い、前記車速センサが検出した車速を用いずに推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出するように構成してもよい。また、この場合には、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度に加えて前記加速度センサが検出した加速度を用いて前記推測航法位置を推測するようにしてもよい。
【0010】
このようなナビゲーション装置によれば、距離係数が真値に安定せず正しく車速センサで車速を測定できない距離係数の学習中は車速センサの測定する車速を用いずに現在位置を算出する。よって、このような距離係数の学習中の車速センサで車速を正しく測定できない期間中に誤った車速によって誤った現在位置が算出されてしまうことを抑止することができる。また、距離係数の学習が完了して正しく車速が車速センサにおいて測定できるようになった後は、車速センサの測定する車速を考慮に含めて現在位置を、より信頼性高く算出することができるようになる。
【発明の効果】
【0011】
以上のように、本発明によれば、距離係数の学習中の現在位置の算出精度の劣化を抑制することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】本発明の実施形態に係る距離係数学習処理を示すフローチャートである。
【図3】本発明の実施形態に係る現在位置算出処理を示すフローチャートである。
【図4】本発明の実施形態に係るナビゲーション装置の動作例を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態について説明する。
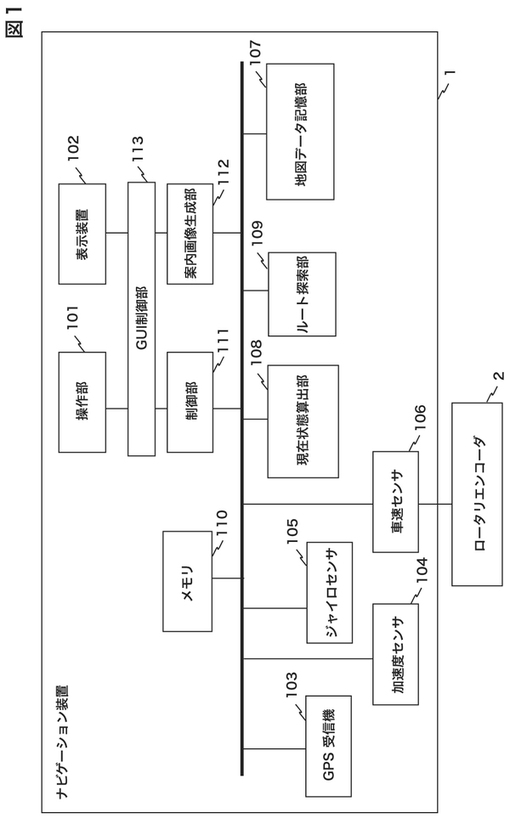
図1に、本実施形態に係るナビゲーション装置の構成を示す。
図示するように、ナビゲーション装置1は、自動車に組み込まれたロータリエンコーダ2と接続されている。ここで、ロータリエンコーダ2は、車輪が所定角度回転する毎にパルスが出現する車速パルス信号を出力する。
次に、ナビゲーション装置1は、操作部101と、表示装置102と、衛星測位を行うGPS受信機103と、自動車の加速度を検知する加速度センサ104と、自動車の角速度を検出するジャイロセンサ105と、車速センサ106と、地図を表す地図データを記録したHDDなどである地図データ記憶部107と、現在状態算出部108と、ルート探索部109と、メモリ110と、制御部111と、案内画像生成部112と、操作部101や表示装置102を用いたGUIをユーザに提供するGUI制御部113とを有する。
【0014】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0015】
以下、このような構成におけるナビゲーション装置1の動作について説明する。
まず、ナビゲーション装置1の現在状態算出部108は、以下の処理を繰り返し行う。
すなわち、制御部111は、後述する距離係数学習処理を実行し、車速センサ106に距離係数を設定する。
車速センサ106は、ロータリエンコーダ2の出力する車速パルス信号のパルスの単位時間の出現数に、制御部111から設定された距離係数を乗じて自動車の車速を出力する。
現在状態算出部108は、後述する現在位置算出処理を実行し、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向とを、それぞれ現在位置、現在進行方位として決定し、メモリ110に設定する。
また、制御部111は、ユーザの目的地設定要求に応じて、ユーザから操作部101、GUI制御部113を介して目的地の設定を受け付け、これをメモリ110にセットする。そして、制御部111は、目的地の設定を受け付けた後に、推奨ルート探索をユーザから指示されたならば、メモリ110にセットされた目的地までの推奨ルートをルート探索部109に探索させる。ルート探索部109は、必要地理的範囲の地図の地図データを地図データ記憶部107から読み出し、メモリ110に設定されている現在位置から目的地までの最小コストの経路を、距離最小などの所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ110にセットする。
【0016】
そして、案内画像生成部112は、地図データ記憶部107から読み出した地図データが表す現在位置周辺の地図を表す地図画像を、予め成されたユーザ設定や初期設定に応じた地図縮尺で、メモリ110にセットされた現在進行方位が上になるように表示する。また、この際に、案内画像生成部112は、この表示した地図画像上の、メモリ110にセットされた現在位置に対応する位置に現在位置マークを表示する。また、案内画像生成部112は、推奨ルートの経路データがメモリ110にセットされている場合には、推奨ルートを表す推奨ルート図形を二次元地図画像上に表示する。また、目的地が地図画像が表す地理的範囲に含まれる場合、案内画像生成部112は、目的地の位置を示す目的地マークも地図画像上に表示する。
【0017】
以下、上述した、制御部111が、車速センサ106に距離係数を設定するために行う距離係数学習処理について説明する。
ここで、この距離係数学習処理は、ナビゲーション装置1の自動車へ組み込み時に起動される他、ユーザより操作部101を介した距離係数再学習指示に応答して起動される処理である。また、この距離係数学習処理は、後述する衛星測位位置と、推測航法位置との所定レベル以上の差が所定期間以上継続した場合に、自動的に起動するようにしてもよい。
【0018】
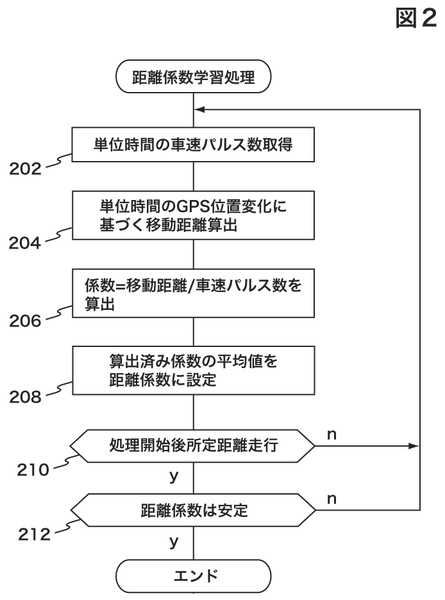
さて、図2に、この距離係数学習処理の手順を示す。
図示するように、この距離係数学習処理において、制御部111は、車速センサ106からロータリエンコーダ2が出力する車速パルス信号に、過去単位時間中に表れたパルス数を取得する(ステップ202)。なお、単位時間に表れるパルス数は、車速センサ106が出力する車速を、その時点で車速センサ106に設定されている距離係数で除算して求めることもできる。
【0019】
次に、制御部111は、GPS受信機103が衛星測位で求めた自車位置である衛星測位位置の履歴から、過去単位時間中の自動車の移動距離を算出する(ステップ204)。
そして、ステップ204で算出した移動距離を、ステップ202で取得したパルス数で除算した値を、係数として求める(ステップ206)。
次に、距離係数学習処理開始以降に、ステップ206で求めた係数の平均値を距離係数として算出し、算出した距離係数を車速センサ106に設定する(ステップ208)。
そして、距離係数学習処理開始以降、所定距離以上自動車が走行したかどうかを衛星測位位置の履歴等に基づいて調べ(ステップ210)、走行していなければステップ202からの処理に戻る。ここで、所定距離としては、ステップ208において算出する距離係数が安定するまでに、最小限必要と考えられる走行距離を予め設定する。
【0020】
一方、所定距離以上自動車が走行している場合には、過去所定回数のステップ208において算出された距離係数の変動が所定レベル以下に安定したかどうかを調べ(ステップ212)、安定していなければステップ202からの処理に戻り、安定していれば距離係数学習処理を終了する。
【0021】
以上、制御部111が行う距離係数学習処理について説明した。
次に、上述した、現在状態算出部108が行う現在位置算出処理について説明する。
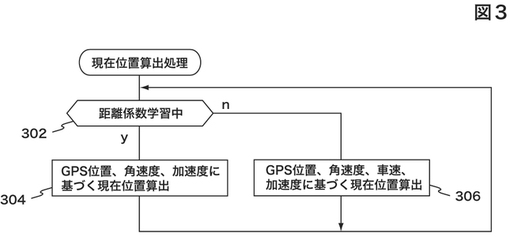
図3に、この現在位置算出処理の手順を示す。
図示するように、現在位置算出処理において、現在状態算出部108は、距離係数を学習中であるかどうか、すなわち、制御部111において距離係数学習処理が実行中であるかどうかを判定し(ステップ302)、距離係数を学習中であれば、車速センサ106で算出した車速を用いずに、GPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度とを用いて現在位置を算出し(ステップ304)、距離係数を学習中でなければ、GPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度と、車速センサ106で算出した車速を用いて現在位置を算出する(ステップ306)処理を繰り返す。
【0022】
ここで、ステップ304で行うGPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度とを用いた現在位置の算出は、たとえば、次のように行う。
すなわち、加速度センサ104で検出した加速度より求まる車速と、ジャイロセンサ105で計測した角速度とより自車位置を推測航法位置として推定する。
そして、GPS受信機103が衛星測位で衛星測位位置を正常に算出できていない場合には、測航法位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
一方、GPS受信機103が衛星測位で衛星測位位置を正常に算出できている場合には、衛星測位位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
また、ステップ306で行うGPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度と、車速センサ106で算出した車速を用いた現在位置の算出は、たとえば、次のように行う。
【0023】
すなわち、加速度センサ104で検出した重力の影響を含む加速度と、車速センサ106で算出した車速を微分して得られる重力の影響を含まない加速度の差より走行路の傾斜を算出する。そして、ジャイロセンサ105で計測した角速度と車速センサ106で算出した車速と算出した傾斜より自車位置を推測航法位置として推定する。ただし、ここでは、加速度センサ104は用いずに、ジャイロセンサ105で計測した角速度と車速センサ106で算出した車速とより、自車位置を推測航法位置として推定するようにしてもよい。
【0024】
そして、GPS受信機103が衛星測位で衛星測位位置を正常に算出できていない場合には、測航法位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
一方、GPS受信機103が衛星測位で衛星測位位置を正常に算出できている場合には、過去に算出した現在位置との継続性等から、衛星測位位置と推測航法位置との、真の自車位置としての確からしさを評価し、衛星測位位置と推測航法位置とのうちの真の自車位置として、より確からしい方の位置を仮現在位置とする。そして仮現在位置と仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置を算出する。
【0025】
ただし、ステップ304、306で行う現在位置の算出アルゴリズムとしては種々のアルゴリズムを採用することができ、ステップ304において行う現在位置の算出アルゴリズムは、車速センサ106の算出した車速を用いずに現在位置を算出するものであればよく、ステップ306において行う現在位置の算出アルゴリズムは、車速センサ106の算出した車速を考慮して現在位置を算出するものであればよい。
【0026】
以上、現在状態算出部108が行う現在位置算出処理について説明した。
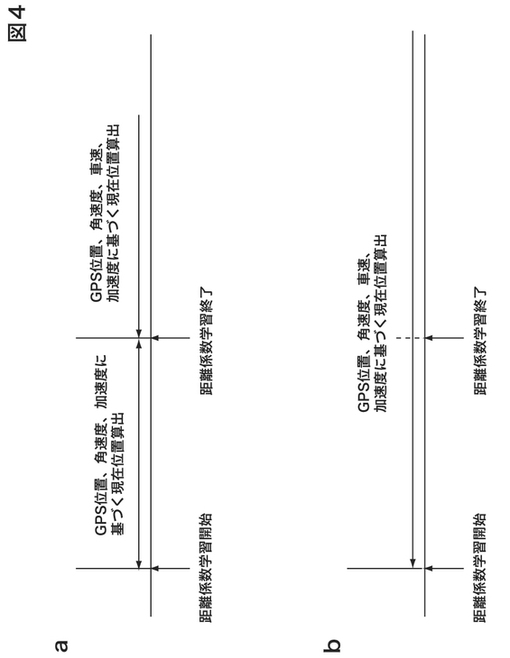
以上のような現在位置算出処理によれば、図4aに示すように、距離係数が真値に安定せず正しく車速センサ106で車速を測定できない距離係数の学習中は車速センサ106の測定する車速を用いずに現在位置を算出する。よって、図4bに示すように距離係数の学習中の有無に関わらずに、車速センサ106の測定する車速を考慮に含めて現在位置を算出する場合とは異なり、このような距離係数の学習中の車速センサ106で車速を正しく測定できない期間中に誤った車速によって誤った現在位置が算出されてしまうことを抑止することができる。また、距離係数の学習が完了して正しく車速が車速センサ106において測定できるようになった後は、車速センサ106の測定する車速を考慮に含めて現在位置をより信頼性高く算出することができるようになる。
【0027】
以上、本発明の実施形態について説明した。
【符号の説明】
【0028】
1…ナビゲーション装置、2…ロータリエンコーダ、101…操作部、102…表示装置、103…GPS受信機、104…加速度センサ、105…ジャイロセンサ、106…車速センサ、107…地図データ記憶部、108…現在状態算出部、109…ルート探索部、110…メモリ、111…制御部、112…案内画像生成部、113…GUI制御部。
【技術分野】
【0001】
本発明は、現在位置を算出するナビゲーション装置に関するものである。
【背景技術】
【0002】
自動車に搭載されたナビゲーション装置における現在位置算出の技術としては、GPS受信機による衛星測位で求めた衛星航法位置と、車速センサやジャイロセンサや加速度センサを用いて求めた推測航法位置との双方を用いて現在位置を算出する技術が知られている(たとえば、特許文献1)。
【0003】
ここで、このような自律航法位置の算出に用いられる車速センサに関する技術としては、車輪の所定回転角度毎に出力される車速パルス数に、1車速パルスあたりの移動距離を表す距離係数を乗じて求めた移動距離より車速を検出する技術が知られている。
また、このような距離係数の設定の技術としては、GPS受信機で算出した移動距離と、車速センサで車速パルス数に距離係数を乗じて求めた移動距離とが一致するように、距離係数を、当該距離係数が安定するまで学習して設定する技術が知られている(たとえば、特許文献2、3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭63-26530号公報
【特許文献2】特開2005-147785号公報
【特許文献3】特開2005-189010号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した距離係数を学習して設定する技術によれば、学習が完了するまでは距離係数として正しい値が設定されないために、車速センサにおいて車速を正しく算出することができない。そして、このために、車速センサを用いて推測航法位置を正しく算出できずに、結果的に、誤った現在位位置が算出されてしまうことが生じ得る。
【0006】
そこで、本発明は、距離係数の学習中の現在位置の算出精度の劣化を抑制することを課題とする。
【課題を解決するための手段】
【0007】
前記課題達成のために、本発明は、現在位置を算出するナビゲーション装置に、地図データを記憶した地図記憶部と、自動車の車輪が所定回転角度回転する毎にパルスが出現する車速パルス信号の単位時間あたりのパルス出現数に、設定された距離係数を乗じて車速を検出する車速センサと、前記自動車の角速度を検出するジャイロセンサと、前記自動車の加速度を検出する加速度センサと、衛星測位により前記自動車の位置を算出するGPS受信機と、前記GPS受信機が算出した前記自動車の位置の移動量と、前記車速センサが検出した車速より求まる前記自動車の位置の移動量とが一致するように、前記距離係数を学習し、学習した距離係数を前記車速センサに設定する距離係数学習手段と、前記自動車の現在位置を算出する現在位置算出手段とを備え、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データとに少なくとも基づいて前記現在位置を算出し、前記距離係数学習手段が前記距離係数の学習を行っている期間中は、前記GPS受信機が算出した前記自動車の位置と、前記ジャイロセンサが検出した角速度と、前記加速度センサが検出した加速度と、前記地図データとに少なくとも基づき、かつ、前記車速センサが検出した車速に基づかずに前記現在位置を算出するようにしたものである。
【0008】
ここで、このようなナビゲーション装置は、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データに加えて前記加速度センサが検出した加速度を用いて、前記現在位置を算出するように構成してもよい。
【0009】
また、このようなナビゲーション装置は、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度とを少なくとも用いて推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出し、前記距離係数学習手段が前記距離係数の学習を行っている期間中は、前記ジャイロセンサが検出した角速度と前記加速度センサが検出した加速度とを用い、前記車速センサが検出した車速を用いずに推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出するように構成してもよい。また、この場合には、前記現在位置算出手段において、前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度に加えて前記加速度センサが検出した加速度を用いて前記推測航法位置を推測するようにしてもよい。
【0010】
このようなナビゲーション装置によれば、距離係数が真値に安定せず正しく車速センサで車速を測定できない距離係数の学習中は車速センサの測定する車速を用いずに現在位置を算出する。よって、このような距離係数の学習中の車速センサで車速を正しく測定できない期間中に誤った車速によって誤った現在位置が算出されてしまうことを抑止することができる。また、距離係数の学習が完了して正しく車速が車速センサにおいて測定できるようになった後は、車速センサの測定する車速を考慮に含めて現在位置を、より信頼性高く算出することができるようになる。
【発明の効果】
【0011】
以上のように、本発明によれば、距離係数の学習中の現在位置の算出精度の劣化を抑制することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係るナビゲーション装置の構成を示すブロック図である。
【図2】本発明の実施形態に係る距離係数学習処理を示すフローチャートである。
【図3】本発明の実施形態に係る現在位置算出処理を示すフローチャートである。
【図4】本発明の実施形態に係るナビゲーション装置の動作例を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施形態について説明する。
図1に、本実施形態に係るナビゲーション装置の構成を示す。
図示するように、ナビゲーション装置1は、自動車に組み込まれたロータリエンコーダ2と接続されている。ここで、ロータリエンコーダ2は、車輪が所定角度回転する毎にパルスが出現する車速パルス信号を出力する。
次に、ナビゲーション装置1は、操作部101と、表示装置102と、衛星測位を行うGPS受信機103と、自動車の加速度を検知する加速度センサ104と、自動車の角速度を検出するジャイロセンサ105と、車速センサ106と、地図を表す地図データを記録したHDDなどである地図データ記憶部107と、現在状態算出部108と、ルート探索部109と、メモリ110と、制御部111と、案内画像生成部112と、操作部101や表示装置102を用いたGUIをユーザに提供するGUI制御部113とを有する。
【0014】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリや、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0015】
以下、このような構成におけるナビゲーション装置1の動作について説明する。
まず、ナビゲーション装置1の現在状態算出部108は、以下の処理を繰り返し行う。
すなわち、制御部111は、後述する距離係数学習処理を実行し、車速センサ106に距離係数を設定する。
車速センサ106は、ロータリエンコーダ2の出力する車速パルス信号のパルスの単位時間の出現数に、制御部111から設定された距離係数を乗じて自動車の車速を出力する。
現在状態算出部108は、後述する現在位置算出処理を実行し、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向とを、それぞれ現在位置、現在進行方位として決定し、メモリ110に設定する。
また、制御部111は、ユーザの目的地設定要求に応じて、ユーザから操作部101、GUI制御部113を介して目的地の設定を受け付け、これをメモリ110にセットする。そして、制御部111は、目的地の設定を受け付けた後に、推奨ルート探索をユーザから指示されたならば、メモリ110にセットされた目的地までの推奨ルートをルート探索部109に探索させる。ルート探索部109は、必要地理的範囲の地図の地図データを地図データ記憶部107から読み出し、メモリ110に設定されている現在位置から目的地までの最小コストの経路を、距離最小などの所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ110にセットする。
【0016】
そして、案内画像生成部112は、地図データ記憶部107から読み出した地図データが表す現在位置周辺の地図を表す地図画像を、予め成されたユーザ設定や初期設定に応じた地図縮尺で、メモリ110にセットされた現在進行方位が上になるように表示する。また、この際に、案内画像生成部112は、この表示した地図画像上の、メモリ110にセットされた現在位置に対応する位置に現在位置マークを表示する。また、案内画像生成部112は、推奨ルートの経路データがメモリ110にセットされている場合には、推奨ルートを表す推奨ルート図形を二次元地図画像上に表示する。また、目的地が地図画像が表す地理的範囲に含まれる場合、案内画像生成部112は、目的地の位置を示す目的地マークも地図画像上に表示する。
【0017】
以下、上述した、制御部111が、車速センサ106に距離係数を設定するために行う距離係数学習処理について説明する。
ここで、この距離係数学習処理は、ナビゲーション装置1の自動車へ組み込み時に起動される他、ユーザより操作部101を介した距離係数再学習指示に応答して起動される処理である。また、この距離係数学習処理は、後述する衛星測位位置と、推測航法位置との所定レベル以上の差が所定期間以上継続した場合に、自動的に起動するようにしてもよい。
【0018】
さて、図2に、この距離係数学習処理の手順を示す。
図示するように、この距離係数学習処理において、制御部111は、車速センサ106からロータリエンコーダ2が出力する車速パルス信号に、過去単位時間中に表れたパルス数を取得する(ステップ202)。なお、単位時間に表れるパルス数は、車速センサ106が出力する車速を、その時点で車速センサ106に設定されている距離係数で除算して求めることもできる。
【0019】
次に、制御部111は、GPS受信機103が衛星測位で求めた自車位置である衛星測位位置の履歴から、過去単位時間中の自動車の移動距離を算出する(ステップ204)。
そして、ステップ204で算出した移動距離を、ステップ202で取得したパルス数で除算した値を、係数として求める(ステップ206)。
次に、距離係数学習処理開始以降に、ステップ206で求めた係数の平均値を距離係数として算出し、算出した距離係数を車速センサ106に設定する(ステップ208)。
そして、距離係数学習処理開始以降、所定距離以上自動車が走行したかどうかを衛星測位位置の履歴等に基づいて調べ(ステップ210)、走行していなければステップ202からの処理に戻る。ここで、所定距離としては、ステップ208において算出する距離係数が安定するまでに、最小限必要と考えられる走行距離を予め設定する。
【0020】
一方、所定距離以上自動車が走行している場合には、過去所定回数のステップ208において算出された距離係数の変動が所定レベル以下に安定したかどうかを調べ(ステップ212)、安定していなければステップ202からの処理に戻り、安定していれば距離係数学習処理を終了する。
【0021】
以上、制御部111が行う距離係数学習処理について説明した。
次に、上述した、現在状態算出部108が行う現在位置算出処理について説明する。
図3に、この現在位置算出処理の手順を示す。
図示するように、現在位置算出処理において、現在状態算出部108は、距離係数を学習中であるかどうか、すなわち、制御部111において距離係数学習処理が実行中であるかどうかを判定し(ステップ302)、距離係数を学習中であれば、車速センサ106で算出した車速を用いずに、GPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度とを用いて現在位置を算出し(ステップ304)、距離係数を学習中でなければ、GPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度と、車速センサ106で算出した車速を用いて現在位置を算出する(ステップ306)処理を繰り返す。
【0022】
ここで、ステップ304で行うGPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度とを用いた現在位置の算出は、たとえば、次のように行う。
すなわち、加速度センサ104で検出した加速度より求まる車速と、ジャイロセンサ105で計測した角速度とより自車位置を推測航法位置として推定する。
そして、GPS受信機103が衛星測位で衛星測位位置を正常に算出できていない場合には、測航法位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
一方、GPS受信機103が衛星測位で衛星測位位置を正常に算出できている場合には、衛星測位位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
また、ステップ306で行うGPS受信機103が衛星測位で算出した衛星測位位置と、ジャイロセンサ105で計測した角速度と、加速度センサ104で検出した加速度と、車速センサ106で算出した車速を用いた現在位置の算出は、たとえば、次のように行う。
【0023】
すなわち、加速度センサ104で検出した重力の影響を含む加速度と、車速センサ106で算出した車速を微分して得られる重力の影響を含まない加速度の差より走行路の傾斜を算出する。そして、ジャイロセンサ105で計測した角速度と車速センサ106で算出した車速と算出した傾斜より自車位置を推測航法位置として推定する。ただし、ここでは、加速度センサ104は用いずに、ジャイロセンサ105で計測した角速度と車速センサ106で算出した車速とより、自車位置を推測航法位置として推定するようにしてもよい。
【0024】
そして、GPS受信機103が衛星測位で衛星測位位置を正常に算出できていない場合には、測航法位置を仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置として算出する。
一方、GPS受信機103が衛星測位で衛星測位位置を正常に算出できている場合には、過去に算出した現在位置との継続性等から、衛星測位位置と推測航法位置との、真の自車位置としての確からしさを評価し、衛星測位位置と推測航法位置とのうちの真の自車位置として、より確からしい方の位置を仮現在位置とする。そして仮現在位置と仮現在位置として、当該仮現在位置と前回決定した現在位置の周辺の地図とのマップマッチングを行って現在位置を算出する。
【0025】
ただし、ステップ304、306で行う現在位置の算出アルゴリズムとしては種々のアルゴリズムを採用することができ、ステップ304において行う現在位置の算出アルゴリズムは、車速センサ106の算出した車速を用いずに現在位置を算出するものであればよく、ステップ306において行う現在位置の算出アルゴリズムは、車速センサ106の算出した車速を考慮して現在位置を算出するものであればよい。
【0026】
以上、現在状態算出部108が行う現在位置算出処理について説明した。
以上のような現在位置算出処理によれば、図4aに示すように、距離係数が真値に安定せず正しく車速センサ106で車速を測定できない距離係数の学習中は車速センサ106の測定する車速を用いずに現在位置を算出する。よって、図4bに示すように距離係数の学習中の有無に関わらずに、車速センサ106の測定する車速を考慮に含めて現在位置を算出する場合とは異なり、このような距離係数の学習中の車速センサ106で車速を正しく測定できない期間中に誤った車速によって誤った現在位置が算出されてしまうことを抑止することができる。また、距離係数の学習が完了して正しく車速が車速センサ106において測定できるようになった後は、車速センサ106の測定する車速を考慮に含めて現在位置をより信頼性高く算出することができるようになる。
【0027】
以上、本発明の実施形態について説明した。
【符号の説明】
【0028】
1…ナビゲーション装置、2…ロータリエンコーダ、101…操作部、102…表示装置、103…GPS受信機、104…加速度センサ、105…ジャイロセンサ、106…車速センサ、107…地図データ記憶部、108…現在状態算出部、109…ルート探索部、110…メモリ、111…制御部、112…案内画像生成部、113…GUI制御部。
【特許請求の範囲】
【請求項1】
現在位置を算出するナビゲーション装置であって、
地図データを記憶した地図記憶部と、
自動車の車輪が所定回転角度回転する毎にパルスが出現する車速パルス信号の単位時間あたりのパルス出現数に、設定された距離係数を乗じて車速を検出する車速センサと、
前記自動車の角速度を検出するジャイロセンサと、
前記自動車の加速度を検出する加速度センサと、
衛星測位により前記自動車の位置を算出するGPS受信機と、
前記GPS受信機が算出した前記自動車の位置の移動量と、前記車速センサが検出した車速より求まる前記自動車の位置の移動量とが一致するように、前記距離係数を学習し、学習した距離係数を前記車速センサに設定する距離係数学習手段と、
前記自動車の現在位置を算出する現在位置算出手段とを有し、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、
前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データとに少なくとも基づいて前記現在位置を算出し、
前記距離係数学習手段が前記距離係数の学習を行っている期間中は、
前記GPS受信機が算出した前記自動車の位置と、前記ジャイロセンサが検出した角速度と、前記加速度センサが検出した加速度と、前記地図データとに少なくとも基づき、かつ、前記車速センサが検出した車速に基づかずに前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データに加えて前記加速度センサが検出した加速度を用いて、前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項3】
請求項1記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、
前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度とを少なくとも用いて推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出し、
前記距離係数学習手段が前記距離係数の学習を行っている期間中は、
前記ジャイロセンサが検出した角速度と前記加速度センサが検出した加速度とを用い、前記車速センサが検出した車速を用いずに推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項4】
請求項3記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度に加えて前記加速度センサが検出した加速度を用いて前記推測航法位置を推測することを特徴とするナビゲーション装置。
【請求項1】
現在位置を算出するナビゲーション装置であって、
地図データを記憶した地図記憶部と、
自動車の車輪が所定回転角度回転する毎にパルスが出現する車速パルス信号の単位時間あたりのパルス出現数に、設定された距離係数を乗じて車速を検出する車速センサと、
前記自動車の角速度を検出するジャイロセンサと、
前記自動車の加速度を検出する加速度センサと、
衛星測位により前記自動車の位置を算出するGPS受信機と、
前記GPS受信機が算出した前記自動車の位置の移動量と、前記車速センサが検出した車速より求まる前記自動車の位置の移動量とが一致するように、前記距離係数を学習し、学習した距離係数を前記車速センサに設定する距離係数学習手段と、
前記自動車の現在位置を算出する現在位置算出手段とを有し、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、
前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データとに少なくとも基づいて前記現在位置を算出し、
前記距離係数学習手段が前記距離係数の学習を行っている期間中は、
前記GPS受信機が算出した前記自動車の位置と、前記ジャイロセンサが検出した角速度と、前記加速度センサが検出した加速度と、前記地図データとに少なくとも基づき、かつ、前記車速センサが検出した車速に基づかずに前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項2】
請求項1記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記GPS受信機が算出した前記自動車の位置と、前記車速センサが検出した車速と、前記ジャイロセンサが検出した角速度と、前記地図データに加えて前記加速度センサが検出した加速度を用いて、前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項3】
請求項1記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、
前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度とを少なくとも用いて推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出し、
前記距離係数学習手段が前記距離係数の学習を行っている期間中は、
前記ジャイロセンサが検出した角速度と前記加速度センサが検出した加速度とを用い、前記車速センサが検出した車速を用いずに推測した前記自動車の位置である推測航法位置と、前記GPS受信機が算出した前記自動車の位置である衛星航法位置との一方を所定の基準に従って仮現在位置として選択し、選択した仮現在位置を、前記地図データにマップマッチングして前記現在位置を算出することを特徴とするナビゲーション装置。
【請求項4】
請求項3記載のナビゲーション装置であって、
前記現在位置算出手段は、
前記距離係数学習手段が前記距離係数の学習を行っていない期間中は、前記車速センサが検出した車速と前記ジャイロセンサが検出した角速度に加えて前記加速度センサが検出した加速度を用いて前記推測航法位置を推測することを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−112825(P2012−112825A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−262593(P2010−262593)
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]