
ナビゲーション装置
【課題】推奨レーンの案内に際して使用者が混乱することを抑制できるナビゲーション装置の実現が望まれる。
【解決手段】撮影装置21により撮影した画像情報Gに含まれる地物の画像認識結果に基づいて自車両の走行レーンを判定するレーン判定部8と、レーン案内地点のそれぞれにおいて自車両の走行レーンを画像認識により判定するため必要な地物である必要認識地物Frを、案内経路に含まれる全てのレーン案内地点について抽出する必要認識地物抽出部34と、抽出された必要認識地物Fr各々についての画像認識の成功率である認識率を導出する認識率導出部31と、必要認識地物Fr各々の認識率に基づいて、案内経路の全体に亘る推奨レーン案内の方法を、相対レーン案内及び絶対レーン案内のいずれかに統一するように決定する案内方法決定部35と、を備えるナビゲーション装置。
【解決手段】撮影装置21により撮影した画像情報Gに含まれる地物の画像認識結果に基づいて自車両の走行レーンを判定するレーン判定部8と、レーン案内地点のそれぞれにおいて自車両の走行レーンを画像認識により判定するため必要な地物である必要認識地物Frを、案内経路に含まれる全てのレーン案内地点について抽出する必要認識地物抽出部34と、抽出された必要認識地物Fr各々についての画像認識の成功率である認識率を導出する認識率導出部31と、必要認識地物Fr各々の認識率に基づいて、案内経路の全体に亘る推奨レーン案内の方法を、相対レーン案内及び絶対レーン案内のいずれかに統一するように決定する案内方法決定部35と、を備えるナビゲーション装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
近年、経路案内を適切に行うこと等を目的として、自車両の内外から得られる各種の情報に基づいて、自車の走行レーンを特定するナビゲーション装置が知られている。このようなナビゲーション装置の一例として、下記の特許文献1には、車両後部に設けられたバックカメラによって撮影された画像データに対する画像認識を行い、道路の車両通行帯境界線の画像認識結果に基づいて自車の走行レーンを特定し、レーン単位での経路案内を行う構成が記載されている。
【0003】
一般的に、画像認識による走行レーンの特定は、道路上の地物の状態や走行環境など種々の外乱要因のため必ずしも成功するわけではない。そのため下記の特許文献1では、レーン単位の経路探索を行い、自車の走行レーン位置を特定できた場合、かつ、走行レーンと推奨レーンとが異なる場合、車両を走行レーンから推奨レーンに誘導するように音声で経路案内(相対案内)を行い、自車の走行レーン位置を特定できない場合には、「一番左が推奨レーンです。」というように推奨レーンの誘導を絶対位置で行う(絶対案内)構成が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−178383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような構成のナビゲーション装置においては、レーン案内地点のそれぞれにおける自車の走行レーン位置の特定状況に応じて、上述のように車両を走行レーンから推奨レーンに誘導する案内と絶対位置による案内とでたびたび切り変わる場合があり、使用者が混乱して推奨レーンの位置を容易に理解できないおそれがある。
【0006】
そこで、推奨レーンの案内に際して使用者が混乱することを抑制できるナビゲーション装置の実現が望まれる。
【課題を解決するための手段】
【0007】
本発明に係る、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置の特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得部と、前記画像情報に含まれる地物の画像認識を行う画像認識部と、前記画像認識部による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定部と、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定部により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内部と、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出部と、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出部と、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定部と、を備える点にある。
【0008】
この特徴構成によれば、推奨レーン案内部が推奨レーン案内を開始するに先立って、案内経路に含まれる全てのレーン案内地点において自車レーンを判定できる可能性を予測することができる。従って、そのような自車レーンを判定できる可能性の高さに応じて、判定された自車レーンを用いる相対レーン案内と当該自車レーンを用いない絶対レーン案内とのいずれかを適切に選択し、案内経路の全体に亘ってレーン案内方法を統一することができる。よって、案内経路に従った経路案内に際して、相対レーン案内と絶対レーン案内とが混在することを防ぎ、推奨レーンの案内に際して使用者が混乱することを抑制することができる。
【0009】
ここで、自車両が走行を開始してから最初の前記レーン案内地点に到達するまでの間での前記画像認識部による地物の実際の画像認識の成功率である実認識率を取得する実認識率取得部を更に備え、前記認識率導出部は、前記実認識率を取得できた前記必要認識地物について、当該実認識率を前記認識率とする構成とすると好適である。
【0010】
この構成によれば、経路案内時の実認識率を必要認識地物の認識率とするので、当該必要認識地物の認識率をレーン案内地点を実際に走行する際の当該地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実認識率に基づいて適切にレーン案内方法を決定することができる。
【0011】
更に、各地物種別の地物についての基準認識率を取得する基準認識率取得部を更に備え、前記認識率導出部は、同じ地物種別の地物についての前記基準認識率と前記実認識率との差に基づいて補正係数を導出し、前記実認識率を取得できなかった前記必要認識地物について、前記補正係数により前記基準認識率を補正した補正認識率を前記認識率とする構成とすると好適である。
【0012】
この構成によれば、最初の前記レーン案内地点に到達するまでに実認識率を取得できなかった必要認識地物についても、実認識率を取得できた地物と当該地物の基準認識率とに基づいて導出された補正係数を用いて補正することにより、経路案内時の実認識率を反映した補正認識率を適切に導出することができる。従って、全ての必要認識地物の認識率を、レーン案内地点を実際に走行する際の必要認識地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実認識率に基づいて適切にレーン案内方法を決定することができる。
【0013】
更に、少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報を取得する走行環境情報取得部を更に備え、前記基準認識率取得部は、走行環境に応じて異なる前記基準認識率を規定した基準認識率テーブルを備えると共に、前記走行環境情報取得部により取得した現在の走行環境情報に応じた前記基準認識率を取得する構成とすると好適である。
【0014】
この構成によれば、基準認識率をより走行時の環境に即した値にできるので、当該基準認識率に基づいて求まる前記認識率を、レーン案内地点を実際に走行する際の必要認識地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実際の認識率に近い認識率に基づいて適切にレーン案内方法を決定することができる。
【0015】
また、前記必要認識地物抽出部は、前記レーン案内地点のそれぞれについて、前記画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に前記画像認識に成功すればよい選択的認識地物とを分類して、前記必要認識地物として抽出し、前記案内方法決定部は、前記案内経路に含まれる全ての前記レーン案内地点について、前記必須認識地物の全て及び前記選択的認識地物の少なくとも一つの前記認識率が所定の認識率しきい値以上である場合には、前記推奨レーン案内の方法を前記相対レーン案内に決定し、前記案内経路に含まれる前記レーン案内地点の少なくとも一つについて、前記必須認識地物の少なくとも一つ又は前記選択的認識地物の全ての前記認識率が所定の認識率しきい値未満である場合には、前記推奨レーン案内の方法を前記絶対レーン案内に決定する構成とすると好適である。
【0016】
この構成によれば、案内経路に含まれる全てのレーン案内地点において自車レーンを判定できる可能性が高い場合にはレーン案内方法として相対レーン案内を選択し、案内経路に含まれる全てのレーン案内地点の中の一つでも自車レーンを判定できる可能性が低い地点がある場合には絶対レーン案内を選択する構成とすることができる。従って、自車レーンを判定できる可能性の高さに応じて、いずれかのレーン案内方法を適切に選択し、案内経路の全体に亘って推奨レーン案内の方法を統一することができる。
【0017】
以上の各構成を備えた本発明に係るナビゲーション装置の技術的特徴は、ナビゲーションプログラムやナビゲーション方法にも適用可能であり、そのため、本発明は、そのようなプログラムや方法も権利の対象とすることができる。
【0018】
その場合における、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーションプログラムの特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、をコンピュータに実行させる点にある。
【0019】
その場合における、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション方法の特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、を備えたことを特徴とするナビゲーション方法。
【0020】
当然ながら、このナビゲーションプログラム及びナビゲーション方法も上述したナビゲーション装置に係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示すブロック図。
【図2】地図データベースに格納されている地図情報及び地物情報の構成の例を示す説明図
【図3】本発明の実施形態に係る車線を分ける区画線等のレーン区画標示の一例を示す図
【図4】本発明の実施形態に係るレーン案内地点の一例を示す図
【図5】本発明の実施形態に係る基準認識率テーブルの一例を示す図
【図6】本発明の実施形態に係る実認識率取得部が取得する実認識率の一例を示す図
【図7】本発明の実施形態に係る画像認識部による画像認識処理で各レーンを特定するための条件の一例を示す図
【図8】本発明の実施形態に係るレーン案内地点における必要認識地物の一例を示す図
【図9】本発明の実施形態に係る認識率導出部によって導出される認識率の一例を示す図
【図10】本発明の実施形態に係る各必要認識地物についての認識率の判定結果の一例を示す図
【図11】本発明の実施形態に係るレーン判定方法の決定処理手順を示すフローチャート
【発明を実施するための形態】
【0022】
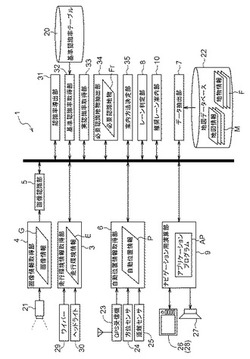
本発明の実施形態について図面に基づいて説明する。図1は、本実施形態に係るナビゲーション装置1の概略構成を示すブロック図である。このナビゲーション装置1は、自車両に搭載された撮影装置21により撮影した画像情報Gの画像認識結果と地図データベース22から取得した地物情報Fとに基づいて、自車両が走行中の道路(以下「走行道路」という。)において、どのレーンを走行しているかを判定できる構成となっている。そして、このナビゲーション装置1は、そのレーン判定結果をもとに後述する相対レーン案内と絶対レーン案内とのいずれかのレーン案内方法で、案内経路に沿って走行するための推奨レーン案内を行うことができる構成となっている。ここで、本実施形態に係るナビゲーション装置1は、推奨レーン案内を開始するに先立って、あらかじめレーン案内方法を決定する点に特徴を有する。
【0023】
以下では本実施形態に係るナビゲーション装置1について、まず「ナビゲーション装置1の各機能部」に関して一動作例を例示しながら説明し、最後に「案内方法の決定手順」について説明する。
【0024】
本実施形態に係るナビゲーション装置1のブロック図を図1に示す。図1に示すナビゲーション装置1の各機能部は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、基準認識率テーブル20及び地図データベース22は、例えば、SSD(Solid State Drive)、ハードディスクドライブ、DVD−ROMなどの光学式ディスクを備えた光学式ドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウェア構成として備えている。そして、これら各部は互いに情報の受け渡しを行うことができるように構成されている。以下、本実施形態に係るナビゲーション装置1の各部の構成について詳細に説明する。
【0025】
このナビゲーション装置1は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うため、GPS(Global Positioning System)受信機23、方位センサ24、距離センサ25、自車位置情報取得部6、ナビゲーション用演算部9、地図データベース22、表示装置26、入力装置28、及び音声出力装置27を備えている。なお、ナビゲーション装置1は、複数の走行レーンを有する地点においては、走行レーン単位での案内経路の探索を行う。以下では、ナビゲーション装置1による案内経路の探索時に、複数の走行レーンが存在する地点において、案内経路として選択された走行レーンを、推奨レーンと呼ぶ。自車位置情報取得部6は、GPS受信機23、方位センサ24、及び距離センサ25からの出力に基づいて自車位置を特定する演算を行う。また、自車位置情報取得部6は、地図データベース22に基づいて、公知のマップマッチング処理を行うことにより自車位置を道路上に合わせる補正も行う。ナビゲーション用演算部9は、自車位置表示、2つの地点間の案内経路の探索、目的地までの経路案内、複数の走行レーンが存在し、推奨レーンを案内する必要のあるレーン案内地点においては推奨レーンの案内、目的地検索等のナビゲーション機能を実行するために所定のアプリケーションプログラムAPに従って動作する演算処理部である。ここで、2つの地点間の案内経路としては、地図上の任意の2地点間を結ぶ案内経路が含まれ、例えば、通常は自車位置に一致する出発地からユーザーが入力した目的地までを結ぶ全案内経路や、当該全案内経路中の一部分、具体的には出発地から高速道路入口までの案内経路、高速道路の入口から出口までの案内経路、高速道路の出口から目的地までの案内経路等が含まれる。また、本実施形態においては、入力装置28は、表示装置26と一体になったタッチスイッチ(タッチパネル機能)及びメカニカルなスイッチ等からなっており、ナビゲーション装置1は、入力装置28を介してユーザーからの各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の指示を受ける。音声出力装置27は、経路案内や後述する推奨レーン案内の際などに、ユーザーに対する案内の出力を行う。
【0026】
1.地図データベース
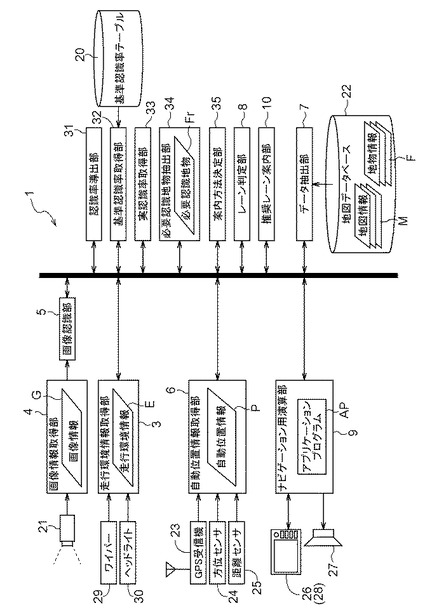
地図データベース22は、所定の領域毎に分けられた地図情報Mと、この地図情報Mに関連付けられた複数の地物情報Fとが格納されたデータベースである。図2は、地図データベース22に格納されている地図情報M及び地物情報Fの構成の例を示す説明図である。この図に示すように、地図データベース22には、道路ネットワークレイヤm1、道路形状レイヤm2、地物レイヤm3が格納されている。
【0027】
道路ネットワークレイヤm1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードnの情報と、2つのノードnを連結して道路を構成する多数のリンクkの情報とを有して構成されている。また、各リンクkは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。また、道路形状レイヤm2は、道路ネットワークレイヤm1に関連付けられて格納され、道路の形状を示すレイヤである。具体的には、2つのノードnの間(リンクk上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の道路形状補完点sの情報や道路幅の情報等を有して構成されている。これらの道路ネットワークレイヤm1及び道路形状レイヤm2に格納された情報により、地図情報Mが構成される。
【0028】
地物レイヤm3は、道路ネットワークレイヤm1及び道路形状レイヤm2に関連付けられて構成され、道路上や道路周辺に設けられた各種の地物の情報、すなわち地物情報Fが
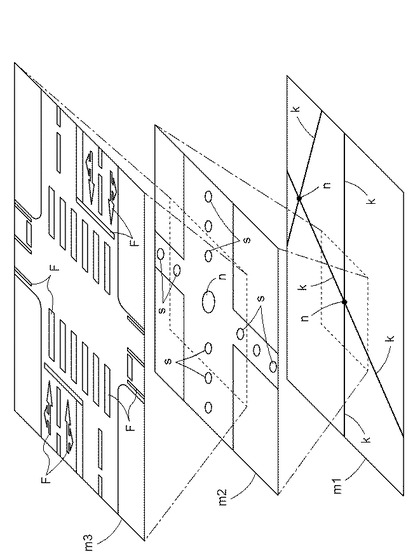
格納されているレイヤである。この地物レイヤm3に地物情報Fが格納される地物には、道路の路面に設けられた道路標示が含まれている。このような道路標示に係る地物には、車線を分ける車道中央線、車道境界線、及び車道外側線等やゼブラゾーン等のレーン区画標示が含まれている。このレーン区画標示には、例えば、図3の(a)〜(i)に示すような、実線、各種の破線、二重線、三重線、ゼブラゾーン等が含まれる。この図において、白色の線は道路上の白線を表し、黒色の線は道路上の黄線を表している。後述するように、本実施形態においては、これらのレーン区画標示が、画像認識部5における画像認識処理の認識対象となる。(以下では、各種地物のうち、これらのレーン区画標示を特に「対象地物」と呼ぶ。)また、この他にも、道路標示に係る地物としては、例えば、横断歩道、停止線、交差点形状標示(十字マーク、T字マーク等)、各レーンの進行方向別通行区分を表す矢印状の道路標示、制限速度を表す速度表示等の各種のペイント標示が含まれる。なお、地物情報Fが格納される地物としては、このような道路標示のほか、信号機、標識、陸橋、トンネル等の各種の地物も含めることができる。
【0029】
地物情報Fは、その内容として各地物の位置情報、地物種別情報、形態情報、及び属性情報を含んでいる。ここで、位置情報は、各地物の地図上の位置(緯度及び経度)及び各地物の向きの情報を有している。地物種別情報は、各地物の地物種別を表す情報である。ここで、地物種別は、基本的に同じ形状の地物を一つの地物種別として規定しているものとする。したがって、地物種別の情報は、例えば、図3に示すような、実線、破線、破線(太)、二重線(実線)等の具体的な種別を表す情報である。また、形態情報は、各地物の形状、大きさ、色彩等の情報を有している。したがって、形態情報は、図3に示すような、二重線(実線)が白線と黄線からなっているといった情報や、破線の太さ等の具体的な形態を表す情報である。すなわち、図3は、地物情報Fに含まれる対象地物に関する地物種別情報及び形態情報を視覚的に表している。属性情報は、各地物が設けられている道路が複数のレーンを有する場合における、当該地物と道路のレーンとの配置関係を表すレーン情報を含んでいる。レーン区画標示についてのレーン情報は、各レーン区画標示がいずれのレーンの左右どちら側に設けられているかを表す情報、例えば、当該レーン区画標示が片側3車線の道路の最も左側の第一レーンと中央の第二レーンとの間に設けられている場合には「3レーン中の第一レーンと第二レーンとの間」のような情報となり、当該レーン区画標示が片側5車線の道路の最も右側の第五レーンの右側に設けられている場合には「5レーン中の第五レーンの右側」のような情報となる。
【0030】
2.画像情報取得部
画像情報取得部4は、自車両に搭載された撮影装置21により撮影した画像情報Gを取得する構成となっている。ここで、撮影装置21は、撮像素子を備えた車載カメラ等であって、少なくとも自車両の周辺の道路の路面を撮影可能な位置に設けられている。このような撮影装置21としては、例えば、自車両の後方の路面を撮影するバックカメラや自車両の前方の路面を撮影するフロントカメラを用いると好適である。そして、画像情報取得部4は、撮影装置21により撮影したアナログの撮影情報を所定の時間間隔で取り込み、デジタル信号の画像情報Gに変換して取得する。この際の画像情報Gの取り込みの時間間隔は、例えば、10〜50ms程度とすることができる。これにより、画像情報取得部4は、撮影装置21により撮影した映像を複数フレームの画像情報Gとして連続的に取得することができる。ここで取得された画像情報Gは、画像認識部5へ出力される。
【0031】
3.データ抽出部
データ抽出部7は、自車位置情報取得部6で取得された自車位置情報P等に基づいて、地図データベース22から必要な地図情報Mや地物情報Fを抽出する構成となっている。本実施形態において、データ抽出部7は、自車位置情報Pに基づいて、走行道路が複数のレーンを有する場合に、自車両の進行方向における走行道路の各レーンに存在する対象地物の地物情報Fを抽出する。ここでいう対象地物とは、画像認識部5による画像認識処理の対象となり、更に後述するレーン判定部8の判定処理の対象となる地物種別の地物であり、本実施形態においては、図3に示すような車線を分ける区画線等のレーン区画標示が該当する。
【0032】
4.画像認識部
画像認識部5は、画像情報取得部4で取得された画像情報Gに含まれる地物の画像認識を行う。本実施形態においては、画像認識部5は、自車位置情報Pに基づいてデータ抽出部7で抽出された対象地物の地物情報Fを用いて、自車両が走行中のレーンである自車レーンに関係する対象地物の地物種別の画像認識処理を行う。ここで用いられる対象地物の地物情報Fは、上述のとおり、自車両の進行方向に存在する全てのレーンに関係する対象地物に関する複数の地物情報Fである。具体的には、画像認識部5は、取得された画像情報Gに対してキャニー法など公知のエッジ抽出処理等を行い、当該画像情報Gに含まれている地物(レーン区画標示)の候補点を抽出する。その後、画像認識部5は、当該地物(レーン区画標示)の候補点に対してハフ変換など公知の形状検出処理等を行う。そして、画像認識部5は、検出したエッジ形状とデータ抽出部7で抽出された複数の対象地物の地物情報Fに含まれる形態情報とのパターンマッチングを行い、最もよく一致した対象地物の地物種別を、当該画像認識した地物の地物種別として認識する。
【0033】
なお、本実施形態においては、画像認識部5は、レーン区画標示の形態としての実線、破線等の線種に基づいて画像情報Gに含まれる地物種別を認識するが、画像認識部5が、線種に加え、線の色(白線か黄線か)を用いて画像情報Gに含まれる地物種別を認識しても良い。具体的には、図3に示すように地図データベース22に含まれる地物情報Fでは白線と黄線とが区別されているため、例えば、上記のパターンマッチングを行う際、画像情報Gから抽出されたエッジにより囲まれた領域の色彩や輝度を検出し、当該地物が白線と黄線とのいずれかであるかを判別し、最もよく一致した対象地物種別を、当該地物の地物種別として認識すると良い。
【0034】
5.レーン判定部
レーン判定部8は、画像認識部5による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定する構成となっている。具体的には、複数の走行レーンが存在するレーン案内地点において、データ抽出部7が自車位置情報Pに基づいて当該レーン案内地点における各レーンの左右両側に位置する対象地物の地物情報Fを抽出し、画像認識部5が自車レーンの左右両側の対象地物を画像認識する。そして、レーン判定部8は、データ抽出部7によって抽出された各レーンの左右両側の地物情報Fと、画像認識部5によって画像認識された自車レーンの左右両側の対象地物とを比較し、最もよく一致したレーンを自車レーンと判定する。
【0035】
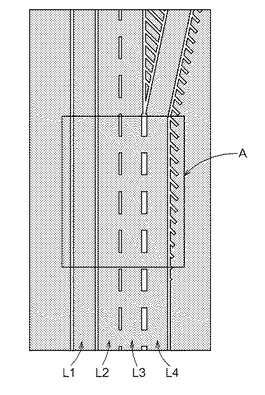
図4はレーン案内地点の一例を示している。この図において、中央に四角で囲まれた領域Aが、後述する推奨レーン案内部10による推奨レーン案内が行われるレーン案内地点に相当する。すなわち、本実施形態では、レーン案内地点は、一点ではなく、道路の長さ方向及び幅方向の双方に広がりを有する領域として設定されている。この図に示す例では、4つの走行レーンが存在しており、以下では説明の便宜上、左から順に、第一レーンL1、第二レーンL2、第三レーンL3、第四レーンL4と呼ぶ。図4に示す例において、レーン判定部8は、地物情報Fから各レーンの左右両側の地物種別を抽出する。そして、画像認識部5が、画像情報Gに含まれる自車レーンの左右両側のレーン区画標示の画像認識を行う。具体的には、実線、破線、破線(太)、ゼブラなどの当該各レーンについての地物種別と、画像認識部5による画像認識結果とを比較する。例えば、画像認識結果により自車レーンの両側が実線と認識した場合、左右両側が実線である第一レーンL1の特徴とが一致するため、レーン判定部8は、自車レーンを第一レーンL1であると判定する。そして、レーン判定部8は自車レーン情報を、ナビゲーション装置1の各部に出力する。なお、本実施形態においては、一致するレーンが存在しなかった場合、レーン判定部8は、判定できなかった旨を示す情報をナビゲーション装置1の各部に出力する。
【0036】
6.推奨レーン案内部
推奨レーン案内部10は、案内経路中の複数のレーンが存在し、推奨レーンを案内する必要があるレーン案内地点において、レーン判定部8により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、案内経路に沿って走行するための推奨レーン案内を行う構成となっている。本実施形態においては、推奨レーン案内部10が、推奨レーン案内を行うに先立って、後述する案内方法決定部35により、案内経路全体に亘って相対レーン案内及び絶対レーン案内のいずれかに統一されたレーン案内を行うことが決定され、推奨レーン案内部10はその決定に従ってレーン案内を行う。
【0037】
推奨レーン案内部10は、案内方法決定部35により案内経路全体に亘って相対レーン案内を行う決定がなされた場合には、各レーン案内地点において、レーン判定部8により判定された自車レーンと、案内経路における推奨レーンとの相対的な位置関係に基づいて、推奨レーンを案内する。ここで、相対レーン案内とは、自車レーンから推奨レーンまでのレーン数と、自車レーンから推奨レーンへ向かう方向とにより推奨レーンを案内する案内方法である。例えば、図4に示す例において、自車両が第一レーンL1、推奨レーンが第四レーンL4の場合、音声出力装置27を通じて「右に3レーン移動してください。」等のように案内する。なお、本実施形態においては、推奨レーン案内部10は、相対レーン案内を行う決定の通知を受けた場合であっても、レーン判定部8が自車レーンを判定できなければ、絶対レーン案内を行う。
【0038】
一方、推奨レーン案内部10は、案内方法決定部35により案内経路全体に亘って絶対レーン案内を行う決定がなされた場合には、各レーン案内地点における推奨レーンの絶対的なレーン位置に基づいて、推奨レーンを案内する。ここで、絶対レーン案内とは、右端及び左端のいずれか一方のレーンから推奨レーンまでのレーン数に基づいて推奨レーンを案内する案内方法である。例えば、図4に示す例において、推奨レーンが第四レーンL4の場合、音声出力装置27を通じて「推奨レーンは、左から4つ目のレーンです。」等のように案内する。
【0039】
7.走行環境情報取得部
走行環境情報取得部3は、少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報Eを取得する構成となっている。この走行環境情報Eには、画像情報取得部4により取得される画像情報Gの状態に影響を与え得る各種の走行環境に関する情報が含まれ、本実施形態では、走行環境情報取得部3は、明るさ指標の他に、天候指標及び場所指標を走行環境情報として取得する。ここで、明るさ指標とは、画像情報Gに含まれる対象地物の画像の明るさを示す指標である。このような明るさ指標には、例えば、照度センサにより取得される自車両の周辺の照度、現在日時と日の出及び日の入りの時刻の情報から算出される太陽の位置の情報、昼/夕方/夜のいずれかを示す明るさ区分情報等が含まれる。本実施形態では、明るさ指標として、昼又は夜のいずれかを示す明るさ区分情報としての昼夜別情報を取得する。このような情報は、例えば、ヘッドライト30の操作スイッチの状態に基づき、ヘッドライト30が消灯状態では昼、点灯状態では夜と判定することにより取得できる。また、太陽の位置の情報や自車両の周辺の照度に基づいて取得することもできる。
【0040】
天候指標とは、自車両の走行地域周辺における天候を示す指標である。このような天候指標には、例えば、晴れ/曇り/雨などの天候を示す情報等が含まれる。本実施形態では、天候指標として、晴れ又は雨のいずれかを示す晴雨別天候情報を取得する。このような情報は、例えば、ワイパー29の操作スイッチの状態に基づき、ワイパー29が動作していれば雨、動作していなければ晴れと判定することにより取得できる。また、自動ワイパーの動作のためのレインセンサの検出情報に基づいて取得することもできる。
場所指標とは、自車両の走行場所を示す指標である。特に、画像情報Gに含まれる対象地物の画像の明るさや画像の鮮明さなど、画像認識部5による画像認識の認識し易さに影響を与える路面の状態などを代表する指標であると好適である。このような場所指標には、例えば、道路が新しいものか古いものかといった情報や、建物内の道路であるか否か(路面を照らす照明の種類)といった情報が含まれる。本実施形態では、場所指標として、トンネル内か否かを示すトンネル情報を取得する。このような情報は、例えば、自車位置情報Pに基づいて地図情報Mから判別することができる。また、ビーコンから受信した情報に基づいて取得することもできる。
【0041】
本実施形態においては、走行環境情報取得部3は、明るさ指標、天候指標、場所指標の3つの情報を取得する。これらの情報から、走行環境情報Eとして、昼晴、昼雨、夜晴、夜雨、トンネルのいずれかを選択し、ナビゲーション装置1の各部に出力する。
【0042】
8.基準認識率取得部、及び基準認識率テーブル
基準認識率取得部32は、各地物種別の地物についての基準認識率を取得する構成となっている。ここで、基準認識率とは、各地物種別の地物についての画像認識の成功率の基準値である。本実施形態では、基準認識率取得部32は、基準認識率テーブル20に規定された基準認識率を読み出すことにより取得する。ここで、基準認識率テーブル20には、各地物種別の地物についての基準認識率として、各地物種別の地物の画像が含まれる画像情報Gに対する画像認識処理を行った際に、当該地物の画像認識に成功する割合を統計的に求めた値が規定されている。すなわち、この基準認識率は、各地物種別の地物の画像認識の成功率の予測値に相当する。
【0043】
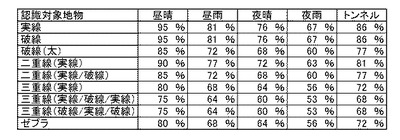
本実施形態においては、ナビゲーション装置1は、走行環境に応じて異なる基準認識率を規定した基準認識率テーブル20を備えている。図5に、基準認識率テーブル20の一例を示す。このように、基準認識率テーブル20には、各地物種別について走行環境情報取得部3が出力する複数の走行環境情報Eに対応した基準認識率が規定されている。具体的には、基準認識率テーブル20には、各地物種別について昼晴、昼雨、夜晴、夜雨、トンネルの5種類の走行環境情報Eに対応した5つの基準認識率が規定されている。
このような構成により、基準認識率取得部32は、走行環境情報取得部3により取得した現在の走行環境情報Eに応じた基準認識率を、基準認識率テーブル20から取得する。
【0044】
9.実認識率取得部
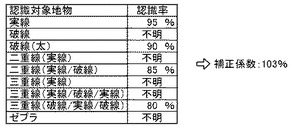
実認識率取得部33は、自車両が走行を開始してから最初のレーン案内地点に到達するまでの間での画像認識部5による各対象地物の実際の画像認識の成功率である実認識率を取得する構成となっている。図6に、本実施形態に係る実認識率取得部33が取得する実認識率の一例を示す。上図に示す例の場合、各対象地物のうち認識率の値が記載されている「実線:90%、破線(太):90%、二重線(実線/破線):85%、三重線(破線/実線/破線):80%」の情報が実認識率に相当する。これらの実認識率は、具体的には、以下のようにして取得される。まず、画像認識部5が、自車位置情報Pに基づいてデータ抽出部7で抽出された対象地物の地物情報Fに基づいて、画像情報Gに対して画像認識処理を行う。実認識率取得部33は、対象地物種別ごとの画像認識処理の成功の可否を取得し、対象地物ごとに画像認識処理を行った回数に対して当該画像認識に成功した割合を求める。したがって、例えば、実認識率取得部33が、10回画像認識処理を行ったうちの9回で実線を画像認識できた場合、図6に示すように「実線:90%」の実認識率情報が得られる。ここで、実認識率取得部33が取得する実認識率は、各対象地物に対して実際に画像認識処理を行った時の成功率であるため、対象地物が撮影装置21の撮影範囲に存在しない場合には、実認識率を求めることができない。このため、自車両が走行を開始してから最初のレーン案内地点に到達するまでに撮影装置21の撮影範囲に入らなかった対象地物、或いは当該撮影範囲に入ったが画像認識処理を行った回数が所定のしきい値以下である対象地物については、実認識率取得部33が実認識率の情報を取得することができない。従って、例えば図6に示されるように、最初のレーン案内地点に到達する直前の時点で全ての対象地物の実認識を取得できていない場合が有り得る。本実施形態においては、このような場合、当該対象地物については不明である旨を示す情報を実認識率情報として設定する。
【0045】
10.必要認識地物抽出部
必要認識地物抽出部34は、地図情報Mに関連付けられた地物情報Fに基づいて、案内経路に含まれる全てのレーン案内地点について必要認識地物Frを抽出する構成となっている。ここで、必要認識地物Frは、レーン案内地点のそれぞれにおいて自車レーンを判定するために、画像認識部5による画像認識に成功することが必要な地物(対象地物)である。本実施形態においては、案内経路に含まれる全てのレーン案内地点のそれぞれに存在する対象地物(レーン区画標示)が必要認識地物Frとなる。また、必要認識地物抽出部34は、レーン案内地点のそれぞれについて、画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に画像認識に成功すればよい選択的認識地物とを分類して、必要認識地物Frとして抽出する。なお、レーン案内地点の抽出範囲となる案内経路としては、上記のとおり、任意の2地点間を結ぶ案内経路が含まれる。従って、例えば、通常は自車位置に一致する出発地からユーザーが入力した目的地までを結ぶ全案内経路がレーン案内地点の抽出範囲となる場合の他、当該全案内経路中の一部分のみがレーン案内地点の抽出範囲となる場合もある。その場合、レーン案内を含む経路案内の方法が同じ一連の経路の範囲を単位として全案内経路を複数の部分に分割し、各部分をレーン案内地点の抽出範囲とすることが望ましい。例えば、一般道と高速道路とで経路案内の方法が異なる場合等には、出発地から高速道路入口までの案内経路、高速道路の入口から出口までの案内経路、及び高速道路の出口から目的地までの案内経路に分割し、各部分をレーン案内地点の抽出範囲とすると好適である。
【0046】
図4、図7、及び図8を用いて、必要認識地物抽出部34による必要認識地物Frの抽出処理を具体的に説明する。図4は、上述のようにレーン案内地点の一例を示している。図7は、図4に示すレーン案内地点において画像認識部5による画像認識処理で各レーンを特定するための条件、及びレーン案内地点における必要認識地物Frの候補を示している。また、図8は、図4に示すレーン案内地点における一つの必要認識地物Frを示している。
【0047】
必要認識地物抽出部34による必要認識地物Frの抽出処理においては、まず必要認識地物抽出部34は、各レーン案内地点における対象地物の画像認識処理によって自車が走行中のレーンである自車レーンを特定するために必要な条件を求める。
【0048】
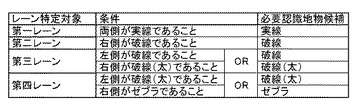
図4に示す例では、第一レーンL1の左右両側は実線であるため、第一レーンL1が自車レーンであると特定される条件は、図7の中央列に示すように「両側が実線であること」である。また、第二レーンL2の左側は実線であり、右側は破線である。ここで、右側が破線のレーンは、第二レーンL2のみなので、第二レーンL2が自車レーンであると特定される条件は「右側が破線であること」である。さらに、第三レーンL3は左側が破線であり、右側が破線(太)である。ここで、左側が破線、又は右側が破線(太)のレーンは第三レーンL3のみなので、第三レーンL3が自車レーンであると特定される条件は「左側が破線であること、又は右側が破線(太)であること」である。最後に、第四レーンL4の左側は破線(太)であり、右側はゼブラである。左側が破線(太)、又は右側がゼブラのレーンは第四レーンL4のみなので、第四レーンL4が自車レーンであると特定される条件は「左側が破線(太)であること、又は右側がゼブラであること」である。
【0049】
これらの条件より、各レーンそれぞれを特定するために必要な地物は、図7の右列に示すように「第一レーンL1:実線、第二レーンL2:破線、第三レーンL3:破線、又は破線(太)、第四レーンL4:破線(太)、又はゼブラ」となる。(以下では、これらの地物を、必要認識地物候補と呼ぶ。)
【0050】
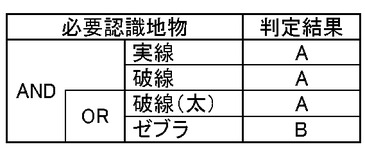
次に、必要認識地物抽出部34は、必要認識地物候補のうち、レーン案内地点において自車が第一レーンL1〜第四レーンL4のいずれのレーンを走行したとしても、画像認識部5による画像認識処理によって自車レーンを特定可能な条件を求める。図7に示すように、自車レーンが第一レーンL1であることを特定するためには、画像認識部5によって実線の画像認識に成功することが必須である、また自車レーンが第二レーンL2であることを特定するためには、破線の画像認識に成功することが必須である。これに対して、自車レーンが第三レーンL3であることを特定するためには、破線及び破線(太)のいずれか一方の画像認識に成功すればよく、自車レーンが第四レーンL4であることを特定するためには、破線(太)及びゼブラのいずれか一方の画像認識に成功すればよい。よって、図4に示すレーン案内地点において、自車レーンが第一レーンL1〜第四レーンL4のいずれであるかを画像認識部5による画像認識処理で特定するためには、実線及び破線は画像認識できることが必須であるが、破線(太)及びゼブラは、どちらかを画像認識できれば良い。従って、図4に示すレーン案内地点については、必要認識地物抽出部34は、図8に示すように、実線及び破線を必須認識地物に分類し、破線(太)及びゼブラを選択的認識地物に分類する。そして、必要認識地物抽出部34は、各レーン案内地点についての必須認識地物及び選択的認識地物の情報を、必要認識地物Frの情報として出力する。
【0051】
必要認識地物抽出部34は、案内経路に含まれる全てのレーン案内地点のそれぞれについて、同様の処理を繰り返す。これにより、必要認識地物抽出部34は、案内経路に含まれる全てのレーン案内地点について必要認識地物Frを抽出する。
【0052】
11.認識率導出部
認識率導出部31は、自車が案内経路を走行するときに各レーン案内地点において、抽出された必要認識地物Fr各々についての画像認識の成功率である認識率を導出する構成となっている。この認識率は、各地物種別の地物についての画像認識の成功率であり、ここでは、各レーン案内地点を自車両が走行した場合に必要認識地物Frについて画像認識に成功する割合を示している。本実施形態において、認識率導出部31は、必要認識地物抽出部34によって出力された各必要認識地物Frのうち、実認識率取得部33が実認識率を取得できた必要認識地物Frについては、当該実認識率を認識率とする。また、認識率導出部31は、必要認識地物抽出部34によって出力された各必要認識地物Frのうち、実認識率取得部33が実認識率を取得できなかった必要認識地物Frについては、同じ地物種別の地物についての基準認識率と実認識率とに基づいて認識率を導出する。
【0053】
より詳しくは、認識率導出部31は、まず同じ地物種別の地物についての基準認識率と実認識率との差に基づいて補正係数を導出する。本実施形態においては、各必要認識地物Frについて基準認識率に対する実認識率の割合を求め、それらの割合の要約統計量を補正係数として求める。具体的には、例えば、実認識率を取得できた必要認識地物Frの数をnとし、各必要認識地物Frについての実認識率をai、基準認識率をbiとしたとき、補正係数を次の式で求める。
【数1】

【0054】
例えば、基準認識率テーブル20が図5に示す値で、走行環境情報取得部3により取得した走行環境情報Eが昼晴で、実認識率取得部33により取得した実認識率が図6に示す値の場合の補正係数の導出を説明する。
図6より実認識率取得部33により実認識率を取得できた対象地物は、「実線:95%、破線(太):90%、二重線(実線/破線):85%、三重線(破線/実線/破線):80%」の4種類である。また、昼晴の場合は、図5よりこれら4種類の基準認識率は「実線:95%、破線(太):85%、二重線(実線/破線):85%、三重線(破線/実線/破線):75%」である。そして、実線、破線(太)、二重線(実線/破線)、及び三重線の4種類の対象地物について、対象地物ごとに実認識率に対する基準認識率の割合を求め、それらの総和を、総数(4)で割ると、補正係数103%が求まる。
【0055】
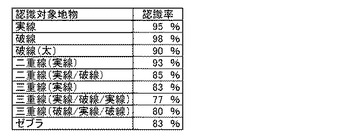
次に、認識率導出部31は、少なくとも実認識率取得部33によって実認識率を取得できなかった必要認識地物Frについて、上述の補正係数により基準認識率を補正した補正認識率を認識率とする。本実施形態においては、実認識率取得部33によって実認識率を取得できた必要認識地物Frについては、まず実認識率を認識率として設定し、実認識率取得部33によって実認識率を取得できなかった必要認識地物Frについては、上述の補正係数を基準認識率に乗算した補正認識率で補完する。図5及び図6に示す例の場合、破線、二重線(実線)、三重線(実線)、三重線(実線/破線/実線)、及びゼブラのそれぞれの基準認識率に当該補正係数である「103%」を掛けて得られる補正認識率を認識率とする。図9に、図5及び図6に示す例の場合に、認識率導出部31によって導出される認識率を示す。
そして、認識率導出部31は、このようにして導出した各対象地物についての認識率を出力する。
【0056】
12.案内方法決定部
案内方法決定部35は、必要認識地物Fr各々の認識率に基づいて、案内経路の全体に亘って推奨レーン案内の方法を、相対レーン案内及び絶対レーン案内のいずれかに統一するように決定する構成となっている。ここで、「案内経路の全体に亘ってレーン案内方法を統一するように決定する」とは、ナビゲーション装置1が案内経路に含まれるいずれの案内地点においても、同じ(共通の)案内方法(相対レーン案内又は絶対レーン案内)で推奨レーン案内を行うように決定することを意味する。案内方法決定部35は、案内経路に含まれる最初のレーン案内地点に自車両が到達するまでに、レーン案内方法を決定する。本実施形態においては、案内方法決定部35は、案内経路に含まれる各レーン案内地点についての、必要認識地物抽出部34が抽出した必要認識地物Frと認識率導出部31により導出された認識率との関係に基づいて、推奨レーン案内のレーン案内方法を決定する。より詳しくは、案内方法決定部35は、案内経路に含まれる全てのレーン案内地点について、必須認識地物の全て及び選択的認識地物の少なくとも一つの認識率が所定の認識率しきい値以上である場合には、レーン案内方法を相対レーン案内に決定し、案内経路に含まれるレーン案内地点の少なくとも一つについて、必須認識地物の少なくとも一つ又は選択的認識地物の全ての認識率が所定の認識率しきい値未満である場合には、レーン案内方法を絶対レーン案内に決定する。ここで、認識率しきい値は、画像認識に成功する可能性を判定するためのしきい値として設定される。本実施形態では、認識率しきい値を、画像認識に成功する可能性が十分に高い値、一例として90%に設定している。そして、案内方法決定部35は、ある必要認識地物Frの認識率が認識率しきい値以上である場合には、当該必要認識地物Frの画像認識に成功する可能性がしきい値以上であって画像認識に成功する可能性が十分に高いと判定し、認識率が認識率しきい値未満である場合には、当該必要認識地物Frの画像認識に成功する可能性がしきい値未満であって画像認識に失敗する可能性があると判定する。
【0057】
具体的には、案内方法決定部35は、まず案内経路に含まれる各レーン案内地点について、必須認識地物の全て及び選択的認識地物の少なくとも一つの認識率が所定の基準認識率以上であるかを調べ、相対レーン案内が可能であるかを決定する。例えば、図4に示すレーン案内地点について、認識率導出部31により導出した認識率は図9に示す通りであり、必要認識地物Frは図8に示す通りである。上記のように認識率しきい値を90%と定めた場合において、各必要認識地物Frについての認識率が認識率しきい値以上である場合を「A」、認識率が認識率しきい値未満である場合を「B」とすると、図10に示すような結果になる。すなわち、図4に示すレーン案内地点の複数の必要認識地物Frのうち、必須認識地物である実線及び破線の認識率が共に認識率しきい値率以上であり、選択的認識地物である破線(太)及びゼブラのうちの一つである破線(太)の認識率が認識率しきい値以上であるので、このレーン案内地点では自車レーンの判定に成功する可能性が十分に高いと判定できる。よって、案内方法決定部35は、このレーン案内地点については相対レーン案内が可能であると判定する。一方、必須認識地物の少なくとも一つ又は選択的認識地物の全ての認識率が認識率しきい値未満である場合には、このレーン案内地点では自車レーンの判定に失敗する可能性があると判定できる。よって、案内方法決定部35は、このレーン案内地点については相対レーン案内が不可能であると判定する。同様に、案内方法決定部35は案内経路に含まれる全てのレーン案内地点のそれぞれについて、相対レーン案内が可能であるかを判定する。そして、案内方法決定部35は、案内経路に含まれる全てのレーン案内地点において、相対レーン案内が可能であると判定された場合にはレーン案内方法を相対レーン案内に決定し、そうでない場合にはレーン案内方法を絶対レーン案内に決定する。そして、案内方法決定部35は、このようにして決定したレーン案内方法を表す情報を、案内経路に含まれる最初のレーン案内地点に自車両が到達するまでに、推奨レーン案内部10に対して出力する。
【0058】
なお、案内方法決定部35による、推奨レーン案内のレーン案内方法の決定のための処理(後述するステップ#15〜#24)は、最初のレーン案内地点までの距離が所定値未満になった時に開始される。ここで、所定値としては、自車両がレーン案内地点に到達するまでに、ナビゲーション装置1がレーン案内方法の決定のための処理を実行し終える程度の距離を設定すると良い。本実施形態においては、後述するステップ#15〜#24の実行に係る処理時間と、自車両が最初のレーン案内地点に近づいたときに想定され得る最大の車速に基づいて、所定値を決定する。具体的には、例えば、ステップ#15〜#24の実行に係る処理時間が1secである場合、自車両が最初のレーン案内地点に近づいたときに想定され得る最大の車速が100km/hとすると、自車両が時速100km/hで1secの間に走行する距離、28m以上(例えば100m)を所定値として設定する。
【0059】
13.レーン案内方法の決定手順
次に、本実施形態に係るナビゲーション装置1の案内方法決定部35によって実行されるレーン案内方法の決定処理手順について説明する。図11は、本実施形態に係るレーン判定方法の決定処理手順を示すフローチャートである。以下に説明する各処理の手順は、上記のナビゲーション装置1の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方の組み合わせにより実行される。ナビゲーション装置1の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置は、上記の各機能部により構成されるナビゲーションプログラムの各ステップを実行するコンピュータとして動作する。以下、図11に示すフローチャートに従って説明する。
【0060】
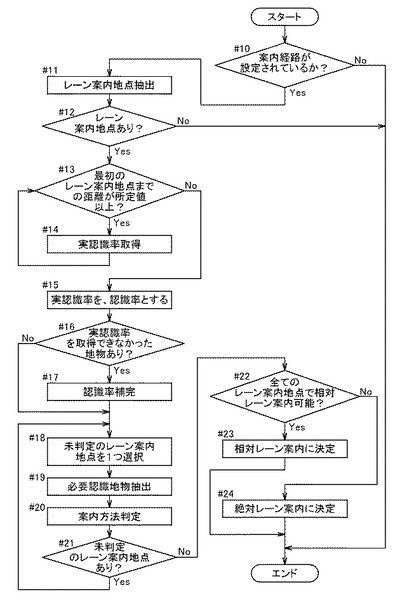
図11に示すように、レーン案内方法の決定に際して、ナビゲーション装置1では、まず、案内経路が設定されているか否かを確認する(ステップ#10)。次に、設定された案内経路に基づいて、データ抽出部7により、案内経路に含まれるレーン案内地点が抽出される(ステップ#11)。続いて、案内経路に、レーン案内地点が存在しているか否かを確認する(ステップ#12)。なお、案内経路にレーン案内地点が存在しない場合(ステップ#12:No)、レーン案内方法を決定する必要はないので、処理はそのまま終了する。
【0061】
一方、案内経路にレーン案内地点が存在する場合には(ステップ#12:Yes)、自車位置情報取得部6によって取得された自車位置情報Pと、最初のレーン案内地点までの距離を算出し、その距離が所定値以上であるか否かを確認する(ステップ#13)。そして、最初のレーン案内地点までの距離が所定値以上であった場合(ステップ#13:Yes)には、実認識率取得部33によって実認識率が取得される(ステップ#14)。その後、再びステップ#13に戻り、再び、自車位置と最初のレーン案内地点までの距離が所定値以上であることを確認する。このような処理手順によって、ステップ#13の条件が満たされている間、すなわち自車位置と最初のレーン案内地点までの距離が所定値未満になるまでの間、実認識率の取得(ステップ#14)が続けられる。
【0062】
そして、自車両が案内経路に沿って走行し、自車位置と最初のレーン案内地点までの距離が所定値未満になった場合(ステップ#13:No)、認識率導出部31によって、ステップ#14で取得された実認識率の値が、そのまま認識率の値に設定される(ステップ#15)。なお、このステップでは、実認識率を取得できなかった対象地物に関しては、認識率の値は不明であるとして処理される。次に、実認識率を取得できなかった対象地物が存在するか否かを確認する(ステップ#16)。実認識率を取得できなかった対象地物が存在する場合(ステップ#16:Yes)、実認識率を取得できなかった対象地物の認識率が、上述したように認識率導出部31によって導出された補正認識率で補完される(ステップ#17)。一方、実認識率を取得できなかった対象地物が存在しない場合(ステップ#16:No)、このような補完処理は行われない。
【0063】
以上のようにして認識率を求めた後、案内経路におけるレーン案内地点を1つ選択する(ステップ#18)。そして、必要認識地物抽出部34によってそのレーン案内地点についての必要認識地物Frを抽出する(ステップ#19)。次に、ステップ#19で抽出された必要認識地物Frに基づき、案内方法決定部35によってそのレーン案内地点で可能なレーン案内方法が判定される(ステップ#20)。ここでは、上記のステップ#15及び#17で決定された各必要認識地物Frの認識率に基づいて、上述したような基準認識率との比較により各レーン案内地点において相対レーン案内が可能か否かを判定する。この判定後、案内経路において、レーン案内方法の判定(ステップ#20)を行っていないレーン案内地点がまだ存在するか否かを確認する(ステップ#21)。未判定のレーン案内地点が存在する場合(ステップ#21:Yes)、ステップ#18に戻る。このような処理手順によって、案内経路に含まれる全てのレーン案内地点についてレーン案内方法を判定する。
【0064】
そして、案内経路に含まれる全てのレーン案内地点についてレーン案内方法を判定し終えて、未判定のレーン案内地点が存在しない場合(ステップ#21:No)、案内方法決定部35は、全てのレーン案内地点について相対レーン案内が可能であるか、すなわち全てのレーン案内地点についてステップ#20で相対レーン案内が可能であると判定されたか否かを確認する(ステップ#22)。そして、全てのレーン案内地点について相対レーン案内が可能であると判定された場合(ステップ#22:Yes)、案内方法決定部35は、案内経路の全体におけるレーン案内方法を相対レーン案内に決定する(ステップ#23)。一方、案内経路に含まれるレーン案内地点のうちの少なくとも1つについて相対レーン案内が不可能であると判定された場合(ステップ#22:No)、案内方法決定部35は、案内経路の全体に亘ってレーン案内方法を絶対レーン案内に統一するように決定する(ステップ#24)。なお、このようなナビゲーション装置1によるレーン案内方法の決定手順における各処理の具体的な方法については、図4〜10を用いて既に具体的に説明したので、ここでは説明を省略する。以上で、ナビゲーション装置1におけるレーン案内方法の決定処理は終了する。
【0065】
〔その他の実施例〕
(1)上記の実施形態では、自車レーン判定のために、画像認識部5が、図3に示すような車線を分ける区画線等のレーン区画標示を画像認識の対象になる地物(対象地物)とする場合の例を説明した。しかし、対象地物は、自車両の走行するレーンを特定するために画像認識できるものであればよく、他の地物を対象地物とすることも可能である。例えば、走行レーンの進行方向別通行区分を表す矢印状の道路標示など、各種の道路上のペイント標示を対象地物としても好適である。
【0066】
(2)上記の実施形態では、認識率導出部31が、基準認識率取得部32によって取得された基準認識率と、実認識率取得部33によって取得された実認識率とに基づいて認識率を導出する場合の例について説明した。しかし、認識率は、案内経路に含まれる各レーン案内地点における必要認識地物Frについての画像認識の成功率を示すものであればよく、他の方法により求めた値を認識率とすることも可能である。例えば、実認識率取得部33を備えず、基準認識率取得部32によって取得された基準認識率をそのまま認識率としても好適である。この場合、レーン案内方法の決定処理は、図11において、ステップ#12の後、基準認識率の値を認識率として、ステップ#18を実行するとよい。
【0067】
(3)上記の実施形態では、基準認識率と実認識率との差に基づいて補正係数を導出し、実認識率を取得できなかった必要認識地物Frについて、補正係数により基準認識率を補正した補正認識率を認識率とする場合の例について説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、補正係数により基準認識率を補正した補正認識率を、すべての必要認識地物Frについて、認識率としてもよい。この他にも、例えば、補正係数を導出せず、実認識率を取得できなかった必要認識地物Frについて、基準認識率をそのまま認識率とすることも可能である。
【0068】
(4)上記の実施形態では、ワイパー29の動作状況やヘッドライト30の光センサの出力を走行環境情報として取得する場合の例について説明した。しかし、走行環境情報Eは、画像情報取得部4により取得される画像情報Gに影響を与え得る状況を示す情報であればよく、他の情報を走行環境情報Eとすることも可能である。例えば、自車両が備える各種のセンサの出力、車両の運転者による車両各部の操作入力等を走行環境情報Eに含めることも好適である。
【0069】
(5)上記の実施形態では、走行環境に応じて異なる基準認識率を規定した基準認識率テーブルを備える場合の例について説明した。しかし、基準認識率テーブルは、認識率を、案内経路に含まれる各レーン案内地点における必要認識地物Frについての画像認識の成功率に近い値を示すものであればよく、基準認識テーブルが、平均的な走行環境における認識率のみを規定したものとして構成されていても好適である。また、基準認識率を基準認識率テーブル以外から取得する構成、例えば、通信回線を介してサーバから必要な基準認識率を適宜取得する構成とすることも、本発明の好適な実施形態の一つである。この場合において、サーバが、自車両のみならず、多数の車両の画像認識結果等を考慮した基準認識率の情報を備える構成とすると更に好適である。
【0070】
(6)上記の実施形態では、推奨レーン案内部10は、相対レーン案内を行うことが決定された場合にも、レーン判定部8が自車レーンを判定できなければ、絶対レーン案内を行う構成の例を説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、このような場合に音声出力装置27を介した音声によるレーン案内は行わず、表示装置26を介して映像によってのみレーン案内を行う構成としてもよい。
【0071】
(7)上記の各実施形態では、ナビゲーション装置1の全ての構成が自車両に搭載される場合を例として説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、撮影装置21を除く一部の構成が、インターネット等の通信ネットワークを介して接続された状態で自車両の外に設置されており、ネットワークを介して情報や信号の送受信を行うことにより、ナビゲーション装置1を構成することも、本発明の好適な実施形態の一つである。
【産業上の利用可能性】
【0072】
本発明は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置として好適に利用することが可能である。
【符号の説明】
【0073】
1 :ナビゲーション装置
3 :走行環境情報取得部
4 :画像情報取得部
5 :画像認識部
6 :自車位置情報取得部
7 :データ抽出部
8 :レーン判定部
10 :推奨レーン案内部
20 :基準認識率テーブル
21 :撮影装置
31 :認識率導出部
32 :基準認識率取得部
33 :実認識率取得部
34 :必要認識地物抽出部
35 :案内方法決定部
E :走行環境情報
F :地物情報
Fr :必要認識地物
G :画像情報
M :地図情報
【技術分野】
【0001】
本発明は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置に関する。
【背景技術】
【0002】
近年、経路案内を適切に行うこと等を目的として、自車両の内外から得られる各種の情報に基づいて、自車の走行レーンを特定するナビゲーション装置が知られている。このようなナビゲーション装置の一例として、下記の特許文献1には、車両後部に設けられたバックカメラによって撮影された画像データに対する画像認識を行い、道路の車両通行帯境界線の画像認識結果に基づいて自車の走行レーンを特定し、レーン単位での経路案内を行う構成が記載されている。
【0003】
一般的に、画像認識による走行レーンの特定は、道路上の地物の状態や走行環境など種々の外乱要因のため必ずしも成功するわけではない。そのため下記の特許文献1では、レーン単位の経路探索を行い、自車の走行レーン位置を特定できた場合、かつ、走行レーンと推奨レーンとが異なる場合、車両を走行レーンから推奨レーンに誘導するように音声で経路案内(相対案内)を行い、自車の走行レーン位置を特定できない場合には、「一番左が推奨レーンです。」というように推奨レーンの誘導を絶対位置で行う(絶対案内)構成が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−178383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような構成のナビゲーション装置においては、レーン案内地点のそれぞれにおける自車の走行レーン位置の特定状況に応じて、上述のように車両を走行レーンから推奨レーンに誘導する案内と絶対位置による案内とでたびたび切り変わる場合があり、使用者が混乱して推奨レーンの位置を容易に理解できないおそれがある。
【0006】
そこで、推奨レーンの案内に際して使用者が混乱することを抑制できるナビゲーション装置の実現が望まれる。
【課題を解決するための手段】
【0007】
本発明に係る、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置の特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得部と、前記画像情報に含まれる地物の画像認識を行う画像認識部と、前記画像認識部による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定部と、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定部により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内部と、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出部と、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出部と、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定部と、を備える点にある。
【0008】
この特徴構成によれば、推奨レーン案内部が推奨レーン案内を開始するに先立って、案内経路に含まれる全てのレーン案内地点において自車レーンを判定できる可能性を予測することができる。従って、そのような自車レーンを判定できる可能性の高さに応じて、判定された自車レーンを用いる相対レーン案内と当該自車レーンを用いない絶対レーン案内とのいずれかを適切に選択し、案内経路の全体に亘ってレーン案内方法を統一することができる。よって、案内経路に従った経路案内に際して、相対レーン案内と絶対レーン案内とが混在することを防ぎ、推奨レーンの案内に際して使用者が混乱することを抑制することができる。
【0009】
ここで、自車両が走行を開始してから最初の前記レーン案内地点に到達するまでの間での前記画像認識部による地物の実際の画像認識の成功率である実認識率を取得する実認識率取得部を更に備え、前記認識率導出部は、前記実認識率を取得できた前記必要認識地物について、当該実認識率を前記認識率とする構成とすると好適である。
【0010】
この構成によれば、経路案内時の実認識率を必要認識地物の認識率とするので、当該必要認識地物の認識率をレーン案内地点を実際に走行する際の当該地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実認識率に基づいて適切にレーン案内方法を決定することができる。
【0011】
更に、各地物種別の地物についての基準認識率を取得する基準認識率取得部を更に備え、前記認識率導出部は、同じ地物種別の地物についての前記基準認識率と前記実認識率との差に基づいて補正係数を導出し、前記実認識率を取得できなかった前記必要認識地物について、前記補正係数により前記基準認識率を補正した補正認識率を前記認識率とする構成とすると好適である。
【0012】
この構成によれば、最初の前記レーン案内地点に到達するまでに実認識率を取得できなかった必要認識地物についても、実認識率を取得できた地物と当該地物の基準認識率とに基づいて導出された補正係数を用いて補正することにより、経路案内時の実認識率を反映した補正認識率を適切に導出することができる。従って、全ての必要認識地物の認識率を、レーン案内地点を実際に走行する際の必要認識地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実認識率に基づいて適切にレーン案内方法を決定することができる。
【0013】
更に、少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報を取得する走行環境情報取得部を更に備え、前記基準認識率取得部は、走行環境に応じて異なる前記基準認識率を規定した基準認識率テーブルを備えると共に、前記走行環境情報取得部により取得した現在の走行環境情報に応じた前記基準認識率を取得する構成とすると好適である。
【0014】
この構成によれば、基準認識率をより走行時の環境に即した値にできるので、当該基準認識率に基づいて求まる前記認識率を、レーン案内地点を実際に走行する際の必要認識地物の認識率に近づけることができる。そして、このように導出した認識率に基づいて、案内方法決定部によりレーン案内方法を適切に決定するので、経路案内時の実際の認識率に近い認識率に基づいて適切にレーン案内方法を決定することができる。
【0015】
また、前記必要認識地物抽出部は、前記レーン案内地点のそれぞれについて、前記画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に前記画像認識に成功すればよい選択的認識地物とを分類して、前記必要認識地物として抽出し、前記案内方法決定部は、前記案内経路に含まれる全ての前記レーン案内地点について、前記必須認識地物の全て及び前記選択的認識地物の少なくとも一つの前記認識率が所定の認識率しきい値以上である場合には、前記推奨レーン案内の方法を前記相対レーン案内に決定し、前記案内経路に含まれる前記レーン案内地点の少なくとも一つについて、前記必須認識地物の少なくとも一つ又は前記選択的認識地物の全ての前記認識率が所定の認識率しきい値未満である場合には、前記推奨レーン案内の方法を前記絶対レーン案内に決定する構成とすると好適である。
【0016】
この構成によれば、案内経路に含まれる全てのレーン案内地点において自車レーンを判定できる可能性が高い場合にはレーン案内方法として相対レーン案内を選択し、案内経路に含まれる全てのレーン案内地点の中の一つでも自車レーンを判定できる可能性が低い地点がある場合には絶対レーン案内を選択する構成とすることができる。従って、自車レーンを判定できる可能性の高さに応じて、いずれかのレーン案内方法を適切に選択し、案内経路の全体に亘って推奨レーン案内の方法を統一することができる。
【0017】
以上の各構成を備えた本発明に係るナビゲーション装置の技術的特徴は、ナビゲーションプログラムやナビゲーション方法にも適用可能であり、そのため、本発明は、そのようなプログラムや方法も権利の対象とすることができる。
【0018】
その場合における、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーションプログラムの特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、をコンピュータに実行させる点にある。
【0019】
その場合における、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション方法の特徴構成は、自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、を備えたことを特徴とするナビゲーション方法。
【0020】
当然ながら、このナビゲーションプログラム及びナビゲーション方法も上述したナビゲーション装置に係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示すブロック図。
【図2】地図データベースに格納されている地図情報及び地物情報の構成の例を示す説明図
【図3】本発明の実施形態に係る車線を分ける区画線等のレーン区画標示の一例を示す図
【図4】本発明の実施形態に係るレーン案内地点の一例を示す図
【図5】本発明の実施形態に係る基準認識率テーブルの一例を示す図
【図6】本発明の実施形態に係る実認識率取得部が取得する実認識率の一例を示す図
【図7】本発明の実施形態に係る画像認識部による画像認識処理で各レーンを特定するための条件の一例を示す図
【図8】本発明の実施形態に係るレーン案内地点における必要認識地物の一例を示す図
【図9】本発明の実施形態に係る認識率導出部によって導出される認識率の一例を示す図
【図10】本発明の実施形態に係る各必要認識地物についての認識率の判定結果の一例を示す図
【図11】本発明の実施形態に係るレーン判定方法の決定処理手順を示すフローチャート
【発明を実施するための形態】
【0022】
本発明の実施形態について図面に基づいて説明する。図1は、本実施形態に係るナビゲーション装置1の概略構成を示すブロック図である。このナビゲーション装置1は、自車両に搭載された撮影装置21により撮影した画像情報Gの画像認識結果と地図データベース22から取得した地物情報Fとに基づいて、自車両が走行中の道路(以下「走行道路」という。)において、どのレーンを走行しているかを判定できる構成となっている。そして、このナビゲーション装置1は、そのレーン判定結果をもとに後述する相対レーン案内と絶対レーン案内とのいずれかのレーン案内方法で、案内経路に沿って走行するための推奨レーン案内を行うことができる構成となっている。ここで、本実施形態に係るナビゲーション装置1は、推奨レーン案内を開始するに先立って、あらかじめレーン案内方法を決定する点に特徴を有する。
【0023】
以下では本実施形態に係るナビゲーション装置1について、まず「ナビゲーション装置1の各機能部」に関して一動作例を例示しながら説明し、最後に「案内方法の決定手順」について説明する。
【0024】
本実施形態に係るナビゲーション装置1のブロック図を図1に示す。図1に示すナビゲーション装置1の各機能部は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、基準認識率テーブル20及び地図データベース22は、例えば、SSD(Solid State Drive)、ハードディスクドライブ、DVD−ROMなどの光学式ディスクを備えた光学式ドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウェア構成として備えている。そして、これら各部は互いに情報の受け渡しを行うことができるように構成されている。以下、本実施形態に係るナビゲーション装置1の各部の構成について詳細に説明する。
【0025】
このナビゲーション装置1は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うため、GPS(Global Positioning System)受信機23、方位センサ24、距離センサ25、自車位置情報取得部6、ナビゲーション用演算部9、地図データベース22、表示装置26、入力装置28、及び音声出力装置27を備えている。なお、ナビゲーション装置1は、複数の走行レーンを有する地点においては、走行レーン単位での案内経路の探索を行う。以下では、ナビゲーション装置1による案内経路の探索時に、複数の走行レーンが存在する地点において、案内経路として選択された走行レーンを、推奨レーンと呼ぶ。自車位置情報取得部6は、GPS受信機23、方位センサ24、及び距離センサ25からの出力に基づいて自車位置を特定する演算を行う。また、自車位置情報取得部6は、地図データベース22に基づいて、公知のマップマッチング処理を行うことにより自車位置を道路上に合わせる補正も行う。ナビゲーション用演算部9は、自車位置表示、2つの地点間の案内経路の探索、目的地までの経路案内、複数の走行レーンが存在し、推奨レーンを案内する必要のあるレーン案内地点においては推奨レーンの案内、目的地検索等のナビゲーション機能を実行するために所定のアプリケーションプログラムAPに従って動作する演算処理部である。ここで、2つの地点間の案内経路としては、地図上の任意の2地点間を結ぶ案内経路が含まれ、例えば、通常は自車位置に一致する出発地からユーザーが入力した目的地までを結ぶ全案内経路や、当該全案内経路中の一部分、具体的には出発地から高速道路入口までの案内経路、高速道路の入口から出口までの案内経路、高速道路の出口から目的地までの案内経路等が含まれる。また、本実施形態においては、入力装置28は、表示装置26と一体になったタッチスイッチ(タッチパネル機能)及びメカニカルなスイッチ等からなっており、ナビゲーション装置1は、入力装置28を介してユーザーからの各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の指示を受ける。音声出力装置27は、経路案内や後述する推奨レーン案内の際などに、ユーザーに対する案内の出力を行う。
【0026】
1.地図データベース
地図データベース22は、所定の領域毎に分けられた地図情報Mと、この地図情報Mに関連付けられた複数の地物情報Fとが格納されたデータベースである。図2は、地図データベース22に格納されている地図情報M及び地物情報Fの構成の例を示す説明図である。この図に示すように、地図データベース22には、道路ネットワークレイヤm1、道路形状レイヤm2、地物レイヤm3が格納されている。
【0027】
道路ネットワークレイヤm1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードnの情報と、2つのノードnを連結して道路を構成する多数のリンクkの情報とを有して構成されている。また、各リンクkは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。また、道路形状レイヤm2は、道路ネットワークレイヤm1に関連付けられて格納され、道路の形状を示すレイヤである。具体的には、2つのノードnの間(リンクk上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の道路形状補完点sの情報や道路幅の情報等を有して構成されている。これらの道路ネットワークレイヤm1及び道路形状レイヤm2に格納された情報により、地図情報Mが構成される。
【0028】
地物レイヤm3は、道路ネットワークレイヤm1及び道路形状レイヤm2に関連付けられて構成され、道路上や道路周辺に設けられた各種の地物の情報、すなわち地物情報Fが
格納されているレイヤである。この地物レイヤm3に地物情報Fが格納される地物には、道路の路面に設けられた道路標示が含まれている。このような道路標示に係る地物には、車線を分ける車道中央線、車道境界線、及び車道外側線等やゼブラゾーン等のレーン区画標示が含まれている。このレーン区画標示には、例えば、図3の(a)〜(i)に示すような、実線、各種の破線、二重線、三重線、ゼブラゾーン等が含まれる。この図において、白色の線は道路上の白線を表し、黒色の線は道路上の黄線を表している。後述するように、本実施形態においては、これらのレーン区画標示が、画像認識部5における画像認識処理の認識対象となる。(以下では、各種地物のうち、これらのレーン区画標示を特に「対象地物」と呼ぶ。)また、この他にも、道路標示に係る地物としては、例えば、横断歩道、停止線、交差点形状標示(十字マーク、T字マーク等)、各レーンの進行方向別通行区分を表す矢印状の道路標示、制限速度を表す速度表示等の各種のペイント標示が含まれる。なお、地物情報Fが格納される地物としては、このような道路標示のほか、信号機、標識、陸橋、トンネル等の各種の地物も含めることができる。
【0029】
地物情報Fは、その内容として各地物の位置情報、地物種別情報、形態情報、及び属性情報を含んでいる。ここで、位置情報は、各地物の地図上の位置(緯度及び経度)及び各地物の向きの情報を有している。地物種別情報は、各地物の地物種別を表す情報である。ここで、地物種別は、基本的に同じ形状の地物を一つの地物種別として規定しているものとする。したがって、地物種別の情報は、例えば、図3に示すような、実線、破線、破線(太)、二重線(実線)等の具体的な種別を表す情報である。また、形態情報は、各地物の形状、大きさ、色彩等の情報を有している。したがって、形態情報は、図3に示すような、二重線(実線)が白線と黄線からなっているといった情報や、破線の太さ等の具体的な形態を表す情報である。すなわち、図3は、地物情報Fに含まれる対象地物に関する地物種別情報及び形態情報を視覚的に表している。属性情報は、各地物が設けられている道路が複数のレーンを有する場合における、当該地物と道路のレーンとの配置関係を表すレーン情報を含んでいる。レーン区画標示についてのレーン情報は、各レーン区画標示がいずれのレーンの左右どちら側に設けられているかを表す情報、例えば、当該レーン区画標示が片側3車線の道路の最も左側の第一レーンと中央の第二レーンとの間に設けられている場合には「3レーン中の第一レーンと第二レーンとの間」のような情報となり、当該レーン区画標示が片側5車線の道路の最も右側の第五レーンの右側に設けられている場合には「5レーン中の第五レーンの右側」のような情報となる。
【0030】
2.画像情報取得部
画像情報取得部4は、自車両に搭載された撮影装置21により撮影した画像情報Gを取得する構成となっている。ここで、撮影装置21は、撮像素子を備えた車載カメラ等であって、少なくとも自車両の周辺の道路の路面を撮影可能な位置に設けられている。このような撮影装置21としては、例えば、自車両の後方の路面を撮影するバックカメラや自車両の前方の路面を撮影するフロントカメラを用いると好適である。そして、画像情報取得部4は、撮影装置21により撮影したアナログの撮影情報を所定の時間間隔で取り込み、デジタル信号の画像情報Gに変換して取得する。この際の画像情報Gの取り込みの時間間隔は、例えば、10〜50ms程度とすることができる。これにより、画像情報取得部4は、撮影装置21により撮影した映像を複数フレームの画像情報Gとして連続的に取得することができる。ここで取得された画像情報Gは、画像認識部5へ出力される。
【0031】
3.データ抽出部
データ抽出部7は、自車位置情報取得部6で取得された自車位置情報P等に基づいて、地図データベース22から必要な地図情報Mや地物情報Fを抽出する構成となっている。本実施形態において、データ抽出部7は、自車位置情報Pに基づいて、走行道路が複数のレーンを有する場合に、自車両の進行方向における走行道路の各レーンに存在する対象地物の地物情報Fを抽出する。ここでいう対象地物とは、画像認識部5による画像認識処理の対象となり、更に後述するレーン判定部8の判定処理の対象となる地物種別の地物であり、本実施形態においては、図3に示すような車線を分ける区画線等のレーン区画標示が該当する。
【0032】
4.画像認識部
画像認識部5は、画像情報取得部4で取得された画像情報Gに含まれる地物の画像認識を行う。本実施形態においては、画像認識部5は、自車位置情報Pに基づいてデータ抽出部7で抽出された対象地物の地物情報Fを用いて、自車両が走行中のレーンである自車レーンに関係する対象地物の地物種別の画像認識処理を行う。ここで用いられる対象地物の地物情報Fは、上述のとおり、自車両の進行方向に存在する全てのレーンに関係する対象地物に関する複数の地物情報Fである。具体的には、画像認識部5は、取得された画像情報Gに対してキャニー法など公知のエッジ抽出処理等を行い、当該画像情報Gに含まれている地物(レーン区画標示)の候補点を抽出する。その後、画像認識部5は、当該地物(レーン区画標示)の候補点に対してハフ変換など公知の形状検出処理等を行う。そして、画像認識部5は、検出したエッジ形状とデータ抽出部7で抽出された複数の対象地物の地物情報Fに含まれる形態情報とのパターンマッチングを行い、最もよく一致した対象地物の地物種別を、当該画像認識した地物の地物種別として認識する。
【0033】
なお、本実施形態においては、画像認識部5は、レーン区画標示の形態としての実線、破線等の線種に基づいて画像情報Gに含まれる地物種別を認識するが、画像認識部5が、線種に加え、線の色(白線か黄線か)を用いて画像情報Gに含まれる地物種別を認識しても良い。具体的には、図3に示すように地図データベース22に含まれる地物情報Fでは白線と黄線とが区別されているため、例えば、上記のパターンマッチングを行う際、画像情報Gから抽出されたエッジにより囲まれた領域の色彩や輝度を検出し、当該地物が白線と黄線とのいずれかであるかを判別し、最もよく一致した対象地物種別を、当該地物の地物種別として認識すると良い。
【0034】
5.レーン判定部
レーン判定部8は、画像認識部5による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定する構成となっている。具体的には、複数の走行レーンが存在するレーン案内地点において、データ抽出部7が自車位置情報Pに基づいて当該レーン案内地点における各レーンの左右両側に位置する対象地物の地物情報Fを抽出し、画像認識部5が自車レーンの左右両側の対象地物を画像認識する。そして、レーン判定部8は、データ抽出部7によって抽出された各レーンの左右両側の地物情報Fと、画像認識部5によって画像認識された自車レーンの左右両側の対象地物とを比較し、最もよく一致したレーンを自車レーンと判定する。
【0035】
図4はレーン案内地点の一例を示している。この図において、中央に四角で囲まれた領域Aが、後述する推奨レーン案内部10による推奨レーン案内が行われるレーン案内地点に相当する。すなわち、本実施形態では、レーン案内地点は、一点ではなく、道路の長さ方向及び幅方向の双方に広がりを有する領域として設定されている。この図に示す例では、4つの走行レーンが存在しており、以下では説明の便宜上、左から順に、第一レーンL1、第二レーンL2、第三レーンL3、第四レーンL4と呼ぶ。図4に示す例において、レーン判定部8は、地物情報Fから各レーンの左右両側の地物種別を抽出する。そして、画像認識部5が、画像情報Gに含まれる自車レーンの左右両側のレーン区画標示の画像認識を行う。具体的には、実線、破線、破線(太)、ゼブラなどの当該各レーンについての地物種別と、画像認識部5による画像認識結果とを比較する。例えば、画像認識結果により自車レーンの両側が実線と認識した場合、左右両側が実線である第一レーンL1の特徴とが一致するため、レーン判定部8は、自車レーンを第一レーンL1であると判定する。そして、レーン判定部8は自車レーン情報を、ナビゲーション装置1の各部に出力する。なお、本実施形態においては、一致するレーンが存在しなかった場合、レーン判定部8は、判定できなかった旨を示す情報をナビゲーション装置1の各部に出力する。
【0036】
6.推奨レーン案内部
推奨レーン案内部10は、案内経路中の複数のレーンが存在し、推奨レーンを案内する必要があるレーン案内地点において、レーン判定部8により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、案内経路に沿って走行するための推奨レーン案内を行う構成となっている。本実施形態においては、推奨レーン案内部10が、推奨レーン案内を行うに先立って、後述する案内方法決定部35により、案内経路全体に亘って相対レーン案内及び絶対レーン案内のいずれかに統一されたレーン案内を行うことが決定され、推奨レーン案内部10はその決定に従ってレーン案内を行う。
【0037】
推奨レーン案内部10は、案内方法決定部35により案内経路全体に亘って相対レーン案内を行う決定がなされた場合には、各レーン案内地点において、レーン判定部8により判定された自車レーンと、案内経路における推奨レーンとの相対的な位置関係に基づいて、推奨レーンを案内する。ここで、相対レーン案内とは、自車レーンから推奨レーンまでのレーン数と、自車レーンから推奨レーンへ向かう方向とにより推奨レーンを案内する案内方法である。例えば、図4に示す例において、自車両が第一レーンL1、推奨レーンが第四レーンL4の場合、音声出力装置27を通じて「右に3レーン移動してください。」等のように案内する。なお、本実施形態においては、推奨レーン案内部10は、相対レーン案内を行う決定の通知を受けた場合であっても、レーン判定部8が自車レーンを判定できなければ、絶対レーン案内を行う。
【0038】
一方、推奨レーン案内部10は、案内方法決定部35により案内経路全体に亘って絶対レーン案内を行う決定がなされた場合には、各レーン案内地点における推奨レーンの絶対的なレーン位置に基づいて、推奨レーンを案内する。ここで、絶対レーン案内とは、右端及び左端のいずれか一方のレーンから推奨レーンまでのレーン数に基づいて推奨レーンを案内する案内方法である。例えば、図4に示す例において、推奨レーンが第四レーンL4の場合、音声出力装置27を通じて「推奨レーンは、左から4つ目のレーンです。」等のように案内する。
【0039】
7.走行環境情報取得部
走行環境情報取得部3は、少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報Eを取得する構成となっている。この走行環境情報Eには、画像情報取得部4により取得される画像情報Gの状態に影響を与え得る各種の走行環境に関する情報が含まれ、本実施形態では、走行環境情報取得部3は、明るさ指標の他に、天候指標及び場所指標を走行環境情報として取得する。ここで、明るさ指標とは、画像情報Gに含まれる対象地物の画像の明るさを示す指標である。このような明るさ指標には、例えば、照度センサにより取得される自車両の周辺の照度、現在日時と日の出及び日の入りの時刻の情報から算出される太陽の位置の情報、昼/夕方/夜のいずれかを示す明るさ区分情報等が含まれる。本実施形態では、明るさ指標として、昼又は夜のいずれかを示す明るさ区分情報としての昼夜別情報を取得する。このような情報は、例えば、ヘッドライト30の操作スイッチの状態に基づき、ヘッドライト30が消灯状態では昼、点灯状態では夜と判定することにより取得できる。また、太陽の位置の情報や自車両の周辺の照度に基づいて取得することもできる。
【0040】
天候指標とは、自車両の走行地域周辺における天候を示す指標である。このような天候指標には、例えば、晴れ/曇り/雨などの天候を示す情報等が含まれる。本実施形態では、天候指標として、晴れ又は雨のいずれかを示す晴雨別天候情報を取得する。このような情報は、例えば、ワイパー29の操作スイッチの状態に基づき、ワイパー29が動作していれば雨、動作していなければ晴れと判定することにより取得できる。また、自動ワイパーの動作のためのレインセンサの検出情報に基づいて取得することもできる。
場所指標とは、自車両の走行場所を示す指標である。特に、画像情報Gに含まれる対象地物の画像の明るさや画像の鮮明さなど、画像認識部5による画像認識の認識し易さに影響を与える路面の状態などを代表する指標であると好適である。このような場所指標には、例えば、道路が新しいものか古いものかといった情報や、建物内の道路であるか否か(路面を照らす照明の種類)といった情報が含まれる。本実施形態では、場所指標として、トンネル内か否かを示すトンネル情報を取得する。このような情報は、例えば、自車位置情報Pに基づいて地図情報Mから判別することができる。また、ビーコンから受信した情報に基づいて取得することもできる。
【0041】
本実施形態においては、走行環境情報取得部3は、明るさ指標、天候指標、場所指標の3つの情報を取得する。これらの情報から、走行環境情報Eとして、昼晴、昼雨、夜晴、夜雨、トンネルのいずれかを選択し、ナビゲーション装置1の各部に出力する。
【0042】
8.基準認識率取得部、及び基準認識率テーブル
基準認識率取得部32は、各地物種別の地物についての基準認識率を取得する構成となっている。ここで、基準認識率とは、各地物種別の地物についての画像認識の成功率の基準値である。本実施形態では、基準認識率取得部32は、基準認識率テーブル20に規定された基準認識率を読み出すことにより取得する。ここで、基準認識率テーブル20には、各地物種別の地物についての基準認識率として、各地物種別の地物の画像が含まれる画像情報Gに対する画像認識処理を行った際に、当該地物の画像認識に成功する割合を統計的に求めた値が規定されている。すなわち、この基準認識率は、各地物種別の地物の画像認識の成功率の予測値に相当する。
【0043】
本実施形態においては、ナビゲーション装置1は、走行環境に応じて異なる基準認識率を規定した基準認識率テーブル20を備えている。図5に、基準認識率テーブル20の一例を示す。このように、基準認識率テーブル20には、各地物種別について走行環境情報取得部3が出力する複数の走行環境情報Eに対応した基準認識率が規定されている。具体的には、基準認識率テーブル20には、各地物種別について昼晴、昼雨、夜晴、夜雨、トンネルの5種類の走行環境情報Eに対応した5つの基準認識率が規定されている。
このような構成により、基準認識率取得部32は、走行環境情報取得部3により取得した現在の走行環境情報Eに応じた基準認識率を、基準認識率テーブル20から取得する。
【0044】
9.実認識率取得部
実認識率取得部33は、自車両が走行を開始してから最初のレーン案内地点に到達するまでの間での画像認識部5による各対象地物の実際の画像認識の成功率である実認識率を取得する構成となっている。図6に、本実施形態に係る実認識率取得部33が取得する実認識率の一例を示す。上図に示す例の場合、各対象地物のうち認識率の値が記載されている「実線:90%、破線(太):90%、二重線(実線/破線):85%、三重線(破線/実線/破線):80%」の情報が実認識率に相当する。これらの実認識率は、具体的には、以下のようにして取得される。まず、画像認識部5が、自車位置情報Pに基づいてデータ抽出部7で抽出された対象地物の地物情報Fに基づいて、画像情報Gに対して画像認識処理を行う。実認識率取得部33は、対象地物種別ごとの画像認識処理の成功の可否を取得し、対象地物ごとに画像認識処理を行った回数に対して当該画像認識に成功した割合を求める。したがって、例えば、実認識率取得部33が、10回画像認識処理を行ったうちの9回で実線を画像認識できた場合、図6に示すように「実線:90%」の実認識率情報が得られる。ここで、実認識率取得部33が取得する実認識率は、各対象地物に対して実際に画像認識処理を行った時の成功率であるため、対象地物が撮影装置21の撮影範囲に存在しない場合には、実認識率を求めることができない。このため、自車両が走行を開始してから最初のレーン案内地点に到達するまでに撮影装置21の撮影範囲に入らなかった対象地物、或いは当該撮影範囲に入ったが画像認識処理を行った回数が所定のしきい値以下である対象地物については、実認識率取得部33が実認識率の情報を取得することができない。従って、例えば図6に示されるように、最初のレーン案内地点に到達する直前の時点で全ての対象地物の実認識を取得できていない場合が有り得る。本実施形態においては、このような場合、当該対象地物については不明である旨を示す情報を実認識率情報として設定する。
【0045】
10.必要認識地物抽出部
必要認識地物抽出部34は、地図情報Mに関連付けられた地物情報Fに基づいて、案内経路に含まれる全てのレーン案内地点について必要認識地物Frを抽出する構成となっている。ここで、必要認識地物Frは、レーン案内地点のそれぞれにおいて自車レーンを判定するために、画像認識部5による画像認識に成功することが必要な地物(対象地物)である。本実施形態においては、案内経路に含まれる全てのレーン案内地点のそれぞれに存在する対象地物(レーン区画標示)が必要認識地物Frとなる。また、必要認識地物抽出部34は、レーン案内地点のそれぞれについて、画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に画像認識に成功すればよい選択的認識地物とを分類して、必要認識地物Frとして抽出する。なお、レーン案内地点の抽出範囲となる案内経路としては、上記のとおり、任意の2地点間を結ぶ案内経路が含まれる。従って、例えば、通常は自車位置に一致する出発地からユーザーが入力した目的地までを結ぶ全案内経路がレーン案内地点の抽出範囲となる場合の他、当該全案内経路中の一部分のみがレーン案内地点の抽出範囲となる場合もある。その場合、レーン案内を含む経路案内の方法が同じ一連の経路の範囲を単位として全案内経路を複数の部分に分割し、各部分をレーン案内地点の抽出範囲とすることが望ましい。例えば、一般道と高速道路とで経路案内の方法が異なる場合等には、出発地から高速道路入口までの案内経路、高速道路の入口から出口までの案内経路、及び高速道路の出口から目的地までの案内経路に分割し、各部分をレーン案内地点の抽出範囲とすると好適である。
【0046】
図4、図7、及び図8を用いて、必要認識地物抽出部34による必要認識地物Frの抽出処理を具体的に説明する。図4は、上述のようにレーン案内地点の一例を示している。図7は、図4に示すレーン案内地点において画像認識部5による画像認識処理で各レーンを特定するための条件、及びレーン案内地点における必要認識地物Frの候補を示している。また、図8は、図4に示すレーン案内地点における一つの必要認識地物Frを示している。
【0047】
必要認識地物抽出部34による必要認識地物Frの抽出処理においては、まず必要認識地物抽出部34は、各レーン案内地点における対象地物の画像認識処理によって自車が走行中のレーンである自車レーンを特定するために必要な条件を求める。
【0048】
図4に示す例では、第一レーンL1の左右両側は実線であるため、第一レーンL1が自車レーンであると特定される条件は、図7の中央列に示すように「両側が実線であること」である。また、第二レーンL2の左側は実線であり、右側は破線である。ここで、右側が破線のレーンは、第二レーンL2のみなので、第二レーンL2が自車レーンであると特定される条件は「右側が破線であること」である。さらに、第三レーンL3は左側が破線であり、右側が破線(太)である。ここで、左側が破線、又は右側が破線(太)のレーンは第三レーンL3のみなので、第三レーンL3が自車レーンであると特定される条件は「左側が破線であること、又は右側が破線(太)であること」である。最後に、第四レーンL4の左側は破線(太)であり、右側はゼブラである。左側が破線(太)、又は右側がゼブラのレーンは第四レーンL4のみなので、第四レーンL4が自車レーンであると特定される条件は「左側が破線(太)であること、又は右側がゼブラであること」である。
【0049】
これらの条件より、各レーンそれぞれを特定するために必要な地物は、図7の右列に示すように「第一レーンL1:実線、第二レーンL2:破線、第三レーンL3:破線、又は破線(太)、第四レーンL4:破線(太)、又はゼブラ」となる。(以下では、これらの地物を、必要認識地物候補と呼ぶ。)
【0050】
次に、必要認識地物抽出部34は、必要認識地物候補のうち、レーン案内地点において自車が第一レーンL1〜第四レーンL4のいずれのレーンを走行したとしても、画像認識部5による画像認識処理によって自車レーンを特定可能な条件を求める。図7に示すように、自車レーンが第一レーンL1であることを特定するためには、画像認識部5によって実線の画像認識に成功することが必須である、また自車レーンが第二レーンL2であることを特定するためには、破線の画像認識に成功することが必須である。これに対して、自車レーンが第三レーンL3であることを特定するためには、破線及び破線(太)のいずれか一方の画像認識に成功すればよく、自車レーンが第四レーンL4であることを特定するためには、破線(太)及びゼブラのいずれか一方の画像認識に成功すればよい。よって、図4に示すレーン案内地点において、自車レーンが第一レーンL1〜第四レーンL4のいずれであるかを画像認識部5による画像認識処理で特定するためには、実線及び破線は画像認識できることが必須であるが、破線(太)及びゼブラは、どちらかを画像認識できれば良い。従って、図4に示すレーン案内地点については、必要認識地物抽出部34は、図8に示すように、実線及び破線を必須認識地物に分類し、破線(太)及びゼブラを選択的認識地物に分類する。そして、必要認識地物抽出部34は、各レーン案内地点についての必須認識地物及び選択的認識地物の情報を、必要認識地物Frの情報として出力する。
【0051】
必要認識地物抽出部34は、案内経路に含まれる全てのレーン案内地点のそれぞれについて、同様の処理を繰り返す。これにより、必要認識地物抽出部34は、案内経路に含まれる全てのレーン案内地点について必要認識地物Frを抽出する。
【0052】
11.認識率導出部
認識率導出部31は、自車が案内経路を走行するときに各レーン案内地点において、抽出された必要認識地物Fr各々についての画像認識の成功率である認識率を導出する構成となっている。この認識率は、各地物種別の地物についての画像認識の成功率であり、ここでは、各レーン案内地点を自車両が走行した場合に必要認識地物Frについて画像認識に成功する割合を示している。本実施形態において、認識率導出部31は、必要認識地物抽出部34によって出力された各必要認識地物Frのうち、実認識率取得部33が実認識率を取得できた必要認識地物Frについては、当該実認識率を認識率とする。また、認識率導出部31は、必要認識地物抽出部34によって出力された各必要認識地物Frのうち、実認識率取得部33が実認識率を取得できなかった必要認識地物Frについては、同じ地物種別の地物についての基準認識率と実認識率とに基づいて認識率を導出する。
【0053】
より詳しくは、認識率導出部31は、まず同じ地物種別の地物についての基準認識率と実認識率との差に基づいて補正係数を導出する。本実施形態においては、各必要認識地物Frについて基準認識率に対する実認識率の割合を求め、それらの割合の要約統計量を補正係数として求める。具体的には、例えば、実認識率を取得できた必要認識地物Frの数をnとし、各必要認識地物Frについての実認識率をai、基準認識率をbiとしたとき、補正係数を次の式で求める。
【数1】
【0054】
例えば、基準認識率テーブル20が図5に示す値で、走行環境情報取得部3により取得した走行環境情報Eが昼晴で、実認識率取得部33により取得した実認識率が図6に示す値の場合の補正係数の導出を説明する。
図6より実認識率取得部33により実認識率を取得できた対象地物は、「実線:95%、破線(太):90%、二重線(実線/破線):85%、三重線(破線/実線/破線):80%」の4種類である。また、昼晴の場合は、図5よりこれら4種類の基準認識率は「実線:95%、破線(太):85%、二重線(実線/破線):85%、三重線(破線/実線/破線):75%」である。そして、実線、破線(太)、二重線(実線/破線)、及び三重線の4種類の対象地物について、対象地物ごとに実認識率に対する基準認識率の割合を求め、それらの総和を、総数(4)で割ると、補正係数103%が求まる。
【0055】
次に、認識率導出部31は、少なくとも実認識率取得部33によって実認識率を取得できなかった必要認識地物Frについて、上述の補正係数により基準認識率を補正した補正認識率を認識率とする。本実施形態においては、実認識率取得部33によって実認識率を取得できた必要認識地物Frについては、まず実認識率を認識率として設定し、実認識率取得部33によって実認識率を取得できなかった必要認識地物Frについては、上述の補正係数を基準認識率に乗算した補正認識率で補完する。図5及び図6に示す例の場合、破線、二重線(実線)、三重線(実線)、三重線(実線/破線/実線)、及びゼブラのそれぞれの基準認識率に当該補正係数である「103%」を掛けて得られる補正認識率を認識率とする。図9に、図5及び図6に示す例の場合に、認識率導出部31によって導出される認識率を示す。
そして、認識率導出部31は、このようにして導出した各対象地物についての認識率を出力する。
【0056】
12.案内方法決定部
案内方法決定部35は、必要認識地物Fr各々の認識率に基づいて、案内経路の全体に亘って推奨レーン案内の方法を、相対レーン案内及び絶対レーン案内のいずれかに統一するように決定する構成となっている。ここで、「案内経路の全体に亘ってレーン案内方法を統一するように決定する」とは、ナビゲーション装置1が案内経路に含まれるいずれの案内地点においても、同じ(共通の)案内方法(相対レーン案内又は絶対レーン案内)で推奨レーン案内を行うように決定することを意味する。案内方法決定部35は、案内経路に含まれる最初のレーン案内地点に自車両が到達するまでに、レーン案内方法を決定する。本実施形態においては、案内方法決定部35は、案内経路に含まれる各レーン案内地点についての、必要認識地物抽出部34が抽出した必要認識地物Frと認識率導出部31により導出された認識率との関係に基づいて、推奨レーン案内のレーン案内方法を決定する。より詳しくは、案内方法決定部35は、案内経路に含まれる全てのレーン案内地点について、必須認識地物の全て及び選択的認識地物の少なくとも一つの認識率が所定の認識率しきい値以上である場合には、レーン案内方法を相対レーン案内に決定し、案内経路に含まれるレーン案内地点の少なくとも一つについて、必須認識地物の少なくとも一つ又は選択的認識地物の全ての認識率が所定の認識率しきい値未満である場合には、レーン案内方法を絶対レーン案内に決定する。ここで、認識率しきい値は、画像認識に成功する可能性を判定するためのしきい値として設定される。本実施形態では、認識率しきい値を、画像認識に成功する可能性が十分に高い値、一例として90%に設定している。そして、案内方法決定部35は、ある必要認識地物Frの認識率が認識率しきい値以上である場合には、当該必要認識地物Frの画像認識に成功する可能性がしきい値以上であって画像認識に成功する可能性が十分に高いと判定し、認識率が認識率しきい値未満である場合には、当該必要認識地物Frの画像認識に成功する可能性がしきい値未満であって画像認識に失敗する可能性があると判定する。
【0057】
具体的には、案内方法決定部35は、まず案内経路に含まれる各レーン案内地点について、必須認識地物の全て及び選択的認識地物の少なくとも一つの認識率が所定の基準認識率以上であるかを調べ、相対レーン案内が可能であるかを決定する。例えば、図4に示すレーン案内地点について、認識率導出部31により導出した認識率は図9に示す通りであり、必要認識地物Frは図8に示す通りである。上記のように認識率しきい値を90%と定めた場合において、各必要認識地物Frについての認識率が認識率しきい値以上である場合を「A」、認識率が認識率しきい値未満である場合を「B」とすると、図10に示すような結果になる。すなわち、図4に示すレーン案内地点の複数の必要認識地物Frのうち、必須認識地物である実線及び破線の認識率が共に認識率しきい値率以上であり、選択的認識地物である破線(太)及びゼブラのうちの一つである破線(太)の認識率が認識率しきい値以上であるので、このレーン案内地点では自車レーンの判定に成功する可能性が十分に高いと判定できる。よって、案内方法決定部35は、このレーン案内地点については相対レーン案内が可能であると判定する。一方、必須認識地物の少なくとも一つ又は選択的認識地物の全ての認識率が認識率しきい値未満である場合には、このレーン案内地点では自車レーンの判定に失敗する可能性があると判定できる。よって、案内方法決定部35は、このレーン案内地点については相対レーン案内が不可能であると判定する。同様に、案内方法決定部35は案内経路に含まれる全てのレーン案内地点のそれぞれについて、相対レーン案内が可能であるかを判定する。そして、案内方法決定部35は、案内経路に含まれる全てのレーン案内地点において、相対レーン案内が可能であると判定された場合にはレーン案内方法を相対レーン案内に決定し、そうでない場合にはレーン案内方法を絶対レーン案内に決定する。そして、案内方法決定部35は、このようにして決定したレーン案内方法を表す情報を、案内経路に含まれる最初のレーン案内地点に自車両が到達するまでに、推奨レーン案内部10に対して出力する。
【0058】
なお、案内方法決定部35による、推奨レーン案内のレーン案内方法の決定のための処理(後述するステップ#15〜#24)は、最初のレーン案内地点までの距離が所定値未満になった時に開始される。ここで、所定値としては、自車両がレーン案内地点に到達するまでに、ナビゲーション装置1がレーン案内方法の決定のための処理を実行し終える程度の距離を設定すると良い。本実施形態においては、後述するステップ#15〜#24の実行に係る処理時間と、自車両が最初のレーン案内地点に近づいたときに想定され得る最大の車速に基づいて、所定値を決定する。具体的には、例えば、ステップ#15〜#24の実行に係る処理時間が1secである場合、自車両が最初のレーン案内地点に近づいたときに想定され得る最大の車速が100km/hとすると、自車両が時速100km/hで1secの間に走行する距離、28m以上(例えば100m)を所定値として設定する。
【0059】
13.レーン案内方法の決定手順
次に、本実施形態に係るナビゲーション装置1の案内方法決定部35によって実行されるレーン案内方法の決定処理手順について説明する。図11は、本実施形態に係るレーン判定方法の決定処理手順を示すフローチャートである。以下に説明する各処理の手順は、上記のナビゲーション装置1の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方の組み合わせにより実行される。ナビゲーション装置1の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置は、上記の各機能部により構成されるナビゲーションプログラムの各ステップを実行するコンピュータとして動作する。以下、図11に示すフローチャートに従って説明する。
【0060】
図11に示すように、レーン案内方法の決定に際して、ナビゲーション装置1では、まず、案内経路が設定されているか否かを確認する(ステップ#10)。次に、設定された案内経路に基づいて、データ抽出部7により、案内経路に含まれるレーン案内地点が抽出される(ステップ#11)。続いて、案内経路に、レーン案内地点が存在しているか否かを確認する(ステップ#12)。なお、案内経路にレーン案内地点が存在しない場合(ステップ#12:No)、レーン案内方法を決定する必要はないので、処理はそのまま終了する。
【0061】
一方、案内経路にレーン案内地点が存在する場合には(ステップ#12:Yes)、自車位置情報取得部6によって取得された自車位置情報Pと、最初のレーン案内地点までの距離を算出し、その距離が所定値以上であるか否かを確認する(ステップ#13)。そして、最初のレーン案内地点までの距離が所定値以上であった場合(ステップ#13:Yes)には、実認識率取得部33によって実認識率が取得される(ステップ#14)。その後、再びステップ#13に戻り、再び、自車位置と最初のレーン案内地点までの距離が所定値以上であることを確認する。このような処理手順によって、ステップ#13の条件が満たされている間、すなわち自車位置と最初のレーン案内地点までの距離が所定値未満になるまでの間、実認識率の取得(ステップ#14)が続けられる。
【0062】
そして、自車両が案内経路に沿って走行し、自車位置と最初のレーン案内地点までの距離が所定値未満になった場合(ステップ#13:No)、認識率導出部31によって、ステップ#14で取得された実認識率の値が、そのまま認識率の値に設定される(ステップ#15)。なお、このステップでは、実認識率を取得できなかった対象地物に関しては、認識率の値は不明であるとして処理される。次に、実認識率を取得できなかった対象地物が存在するか否かを確認する(ステップ#16)。実認識率を取得できなかった対象地物が存在する場合(ステップ#16:Yes)、実認識率を取得できなかった対象地物の認識率が、上述したように認識率導出部31によって導出された補正認識率で補完される(ステップ#17)。一方、実認識率を取得できなかった対象地物が存在しない場合(ステップ#16:No)、このような補完処理は行われない。
【0063】
以上のようにして認識率を求めた後、案内経路におけるレーン案内地点を1つ選択する(ステップ#18)。そして、必要認識地物抽出部34によってそのレーン案内地点についての必要認識地物Frを抽出する(ステップ#19)。次に、ステップ#19で抽出された必要認識地物Frに基づき、案内方法決定部35によってそのレーン案内地点で可能なレーン案内方法が判定される(ステップ#20)。ここでは、上記のステップ#15及び#17で決定された各必要認識地物Frの認識率に基づいて、上述したような基準認識率との比較により各レーン案内地点において相対レーン案内が可能か否かを判定する。この判定後、案内経路において、レーン案内方法の判定(ステップ#20)を行っていないレーン案内地点がまだ存在するか否かを確認する(ステップ#21)。未判定のレーン案内地点が存在する場合(ステップ#21:Yes)、ステップ#18に戻る。このような処理手順によって、案内経路に含まれる全てのレーン案内地点についてレーン案内方法を判定する。
【0064】
そして、案内経路に含まれる全てのレーン案内地点についてレーン案内方法を判定し終えて、未判定のレーン案内地点が存在しない場合(ステップ#21:No)、案内方法決定部35は、全てのレーン案内地点について相対レーン案内が可能であるか、すなわち全てのレーン案内地点についてステップ#20で相対レーン案内が可能であると判定されたか否かを確認する(ステップ#22)。そして、全てのレーン案内地点について相対レーン案内が可能であると判定された場合(ステップ#22:Yes)、案内方法決定部35は、案内経路の全体におけるレーン案内方法を相対レーン案内に決定する(ステップ#23)。一方、案内経路に含まれるレーン案内地点のうちの少なくとも1つについて相対レーン案内が不可能であると判定された場合(ステップ#22:No)、案内方法決定部35は、案内経路の全体に亘ってレーン案内方法を絶対レーン案内に統一するように決定する(ステップ#24)。なお、このようなナビゲーション装置1によるレーン案内方法の決定手順における各処理の具体的な方法については、図4〜10を用いて既に具体的に説明したので、ここでは説明を省略する。以上で、ナビゲーション装置1におけるレーン案内方法の決定処理は終了する。
【0065】
〔その他の実施例〕
(1)上記の実施形態では、自車レーン判定のために、画像認識部5が、図3に示すような車線を分ける区画線等のレーン区画標示を画像認識の対象になる地物(対象地物)とする場合の例を説明した。しかし、対象地物は、自車両の走行するレーンを特定するために画像認識できるものであればよく、他の地物を対象地物とすることも可能である。例えば、走行レーンの進行方向別通行区分を表す矢印状の道路標示など、各種の道路上のペイント標示を対象地物としても好適である。
【0066】
(2)上記の実施形態では、認識率導出部31が、基準認識率取得部32によって取得された基準認識率と、実認識率取得部33によって取得された実認識率とに基づいて認識率を導出する場合の例について説明した。しかし、認識率は、案内経路に含まれる各レーン案内地点における必要認識地物Frについての画像認識の成功率を示すものであればよく、他の方法により求めた値を認識率とすることも可能である。例えば、実認識率取得部33を備えず、基準認識率取得部32によって取得された基準認識率をそのまま認識率としても好適である。この場合、レーン案内方法の決定処理は、図11において、ステップ#12の後、基準認識率の値を認識率として、ステップ#18を実行するとよい。
【0067】
(3)上記の実施形態では、基準認識率と実認識率との差に基づいて補正係数を導出し、実認識率を取得できなかった必要認識地物Frについて、補正係数により基準認識率を補正した補正認識率を認識率とする場合の例について説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、補正係数により基準認識率を補正した補正認識率を、すべての必要認識地物Frについて、認識率としてもよい。この他にも、例えば、補正係数を導出せず、実認識率を取得できなかった必要認識地物Frについて、基準認識率をそのまま認識率とすることも可能である。
【0068】
(4)上記の実施形態では、ワイパー29の動作状況やヘッドライト30の光センサの出力を走行環境情報として取得する場合の例について説明した。しかし、走行環境情報Eは、画像情報取得部4により取得される画像情報Gに影響を与え得る状況を示す情報であればよく、他の情報を走行環境情報Eとすることも可能である。例えば、自車両が備える各種のセンサの出力、車両の運転者による車両各部の操作入力等を走行環境情報Eに含めることも好適である。
【0069】
(5)上記の実施形態では、走行環境に応じて異なる基準認識率を規定した基準認識率テーブルを備える場合の例について説明した。しかし、基準認識率テーブルは、認識率を、案内経路に含まれる各レーン案内地点における必要認識地物Frについての画像認識の成功率に近い値を示すものであればよく、基準認識テーブルが、平均的な走行環境における認識率のみを規定したものとして構成されていても好適である。また、基準認識率を基準認識率テーブル以外から取得する構成、例えば、通信回線を介してサーバから必要な基準認識率を適宜取得する構成とすることも、本発明の好適な実施形態の一つである。この場合において、サーバが、自車両のみならず、多数の車両の画像認識結果等を考慮した基準認識率の情報を備える構成とすると更に好適である。
【0070】
(6)上記の実施形態では、推奨レーン案内部10は、相対レーン案内を行うことが決定された場合にも、レーン判定部8が自車レーンを判定できなければ、絶対レーン案内を行う構成の例を説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、このような場合に音声出力装置27を介した音声によるレーン案内は行わず、表示装置26を介して映像によってのみレーン案内を行う構成としてもよい。
【0071】
(7)上記の各実施形態では、ナビゲーション装置1の全ての構成が自車両に搭載される場合を例として説明した。しかし、本発明の適用範囲はこのような構成に限定されるものではない。すなわち、例えば、撮影装置21を除く一部の構成が、インターネット等の通信ネットワークを介して接続された状態で自車両の外に設置されており、ネットワークを介して情報や信号の送受信を行うことにより、ナビゲーション装置1を構成することも、本発明の好適な実施形態の一つである。
【産業上の利用可能性】
【0072】
本発明は、地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置として好適に利用することが可能である。
【符号の説明】
【0073】
1 :ナビゲーション装置
3 :走行環境情報取得部
4 :画像情報取得部
5 :画像認識部
6 :自車位置情報取得部
7 :データ抽出部
8 :レーン判定部
10 :推奨レーン案内部
20 :基準認識率テーブル
21 :撮影装置
31 :認識率導出部
32 :基準認識率取得部
33 :実認識率取得部
34 :必要認識地物抽出部
35 :案内方法決定部
E :走行環境情報
F :地物情報
Fr :必要認識地物
G :画像情報
M :地図情報
【特許請求の範囲】
【請求項1】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置であって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得部と、
前記画像情報に含まれる地物の画像認識を行う画像認識部と、
前記画像認識部による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定部と、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定部により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内部と、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出部と、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出部と、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定部と、
を備えるナビゲーション装置。
【請求項2】
自車両が走行を開始してから最初の前記レーン案内地点に到達するまでの間での前記画像認識部による地物の実際の画像認識の成功率である実認識率を取得する実認識率取得部を更に備え、
前記認識率導出部は、前記実認識率を取得できた前記必要認識地物について、当該実認識率を前記認識率とする請求項1に記載のナビゲーション装置。
【請求項3】
各地物種別の地物についての基準認識率を取得する基準認識率取得部を更に備え、
前記認識率導出部は、同じ地物種別の地物についての前記基準認識率と前記実認識率との差に基づいて補正係数を導出し、前記実認識率を取得できなかった前記必要認識地物について、前記補正係数により前記基準認識率を補正した補正認識率を前記認識率とする請求項2に記載のナビゲーション装置。
【請求項4】
少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報を取得する走行環境情報取得部を更に備え、
前記基準認識率取得部は、走行環境に応じて異なる前記基準認識率を規定した基準認識率テーブルを備えると共に、前記走行環境情報取得部により取得した現在の走行環境情報に応じた前記基準認識率を取得する請求項3に記載のナビゲーション装置。
【請求項5】
前記必要認識地物抽出部は、前記レーン案内地点のそれぞれについて、前記画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に前記画像認識に成功すればよい選択的認識地物とを分類して、前記必要認識地物として抽出し、
前記案内方法決定部は、前記案内経路に含まれる全ての前記レーン案内地点について、前記必須認識地物の全て及び前記選択的認識地物の少なくとも一つの前記認識率が所定の認識率しきい値以上である場合には、前記推奨レーン案内の方法を前記相対レーン案内に決定し、前記案内経路に含まれる前記レーン案内地点の少なくとも一つについて、前記必須認識地物の少なくとも一つ又は前記選択的認識地物の全ての前記認識率が所定の認識率しきい値未満である場合には、前記推奨レーン案内の方法を前記絶対レーン案内に決定する請求項1から4のいずれか一項に記載のナビゲーション装置。
【請求項6】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーションプログラムであって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、
前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、
前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、
をコンピュータに実行させるナビゲーションプログラム。
【請求項7】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション方法であって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、
前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、
前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、
を備えたことを特徴とするナビゲーション方法。
【請求項1】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション装置であって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得部と、
前記画像情報に含まれる地物の画像認識を行う画像認識部と、
前記画像認識部による地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定部と、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定部により判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内部と、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出部と、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出部と、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定部と、
を備えるナビゲーション装置。
【請求項2】
自車両が走行を開始してから最初の前記レーン案内地点に到達するまでの間での前記画像認識部による地物の実際の画像認識の成功率である実認識率を取得する実認識率取得部を更に備え、
前記認識率導出部は、前記実認識率を取得できた前記必要認識地物について、当該実認識率を前記認識率とする請求項1に記載のナビゲーション装置。
【請求項3】
各地物種別の地物についての基準認識率を取得する基準認識率取得部を更に備え、
前記認識率導出部は、同じ地物種別の地物についての前記基準認識率と前記実認識率との差に基づいて補正係数を導出し、前記実認識率を取得できなかった前記必要認識地物について、前記補正係数により前記基準認識率を補正した補正認識率を前記認識率とする請求項2に記載のナビゲーション装置。
【請求項4】
少なくとも自車両の周囲の明るさを示す明るさ指標を含む走行環境情報を取得する走行環境情報取得部を更に備え、
前記基準認識率取得部は、走行環境に応じて異なる前記基準認識率を規定した基準認識率テーブルを備えると共に、前記走行環境情報取得部により取得した現在の走行環境情報に応じた前記基準認識率を取得する請求項3に記載のナビゲーション装置。
【請求項5】
前記必要認識地物抽出部は、前記レーン案内地点のそれぞれについて、前記画像認識に成功することが必須の必須認識地物と、複数の地物の中から選択的に前記画像認識に成功すればよい選択的認識地物とを分類して、前記必要認識地物として抽出し、
前記案内方法決定部は、前記案内経路に含まれる全ての前記レーン案内地点について、前記必須認識地物の全て及び前記選択的認識地物の少なくとも一つの前記認識率が所定の認識率しきい値以上である場合には、前記推奨レーン案内の方法を前記相対レーン案内に決定し、前記案内経路に含まれる前記レーン案内地点の少なくとも一つについて、前記必須認識地物の少なくとも一つ又は前記選択的認識地物の全ての前記認識率が所定の認識率しきい値未満である場合には、前記推奨レーン案内の方法を前記絶対レーン案内に決定する請求項1から4のいずれか一項に記載のナビゲーション装置。
【請求項6】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーションプログラムであって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、
前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、
前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、
をコンピュータに実行させるナビゲーションプログラム。
【請求項7】
地図情報に基づいて2つの地点間の案内経路を探索し、当該案内経路に従った経路案内を行うナビゲーション方法であって、
自車両に搭載された撮影装置により撮影した画像情報を取得する画像情報取得ステップと、
前記画像情報に含まれる地物の画像認識を行う画像認識ステップと、
前記画像認識ステップによる地物の画像認識結果に基づいて自車両が走行中のレーンである自車レーンを判定するレーン判定ステップと、
前記案内経路中の推奨レーンを案内する必要があるレーン案内地点において、前記レーン判定ステップにより判定された自車レーンからの相対的なレーン位置によって推奨レーンを案内する相対レーン案内と、複数のレーンの中での絶対的なレーン位置によって推奨レーンを案内する絶対レーン案内とのいずれかによって、前記案内経路に沿って走行するための推奨レーン案内を行う推奨レーン案内ステップと、
前記レーン案内地点のそれぞれにおいて前記自車レーンを判定するために前記画像認識に成功することが必要な地物である必要認識地物を、前記地図情報に関連付けられた地物情報に基づいて、前記案内経路に含まれる全ての前記レーン案内地点について抽出する必要認識地物抽出ステップと、
抽出された前記必要認識地物各々についての前記画像認識の成功率である認識率を導出する認識率導出ステップと、
前記必要認識地物各々の認識率に基づいて、前記案内経路の全体に亘る前記推奨レーン案内の方法を、前記相対レーン案内及び前記絶対レーン案内のいずれかに統一するように決定する案内方法決定ステップと、
を備えたことを特徴とするナビゲーション方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−117944(P2012−117944A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−268860(P2010−268860)
【出願日】平成22年12月1日(2010.12.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月1日(2010.12.1)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]