
ナビゲーション装置
【課題】測位による地形情報や傾斜センサ、ペダル回転数、スピードセンサ等の各情報を用いて電動アシスト自転車を制御するナビゲーション装置を提供する。
【解決手段】現在位置を検出する現在位置検出手段と、道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、傾斜角度を算出する傾斜検出手段1bと、電動アシスト自転車の速度を算出する速度検出手段2aと、電動アシスト自転車のケイデンスを検出するケイデンス検出手段2bと、変速機の状態を検出する変速機検出手段2cと、走行時における負荷を検出するトルク検出手段2dと、各検出手段で検出される検出結果を記憶する記憶手段1eと、装置の各部を制御する制御手段1gと、現在位置の前方における道路の情報を地図データ保存手段から読み出し記憶手段1eに記憶された検出結果に基づいて電動アシスト自転車の駆動力を制御するアシスト量演算手段1fを備える。
【解決手段】現在位置を検出する現在位置検出手段と、道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、傾斜角度を算出する傾斜検出手段1bと、電動アシスト自転車の速度を算出する速度検出手段2aと、電動アシスト自転車のケイデンスを検出するケイデンス検出手段2bと、変速機の状態を検出する変速機検出手段2cと、走行時における負荷を検出するトルク検出手段2dと、各検出手段で検出される検出結果を記憶する記憶手段1eと、装置の各部を制御する制御手段1gと、現在位置の前方における道路の情報を地図データ保存手段から読み出し記憶手段1eに記憶された検出結果に基づいて電動アシスト自転車の駆動力を制御するアシスト量演算手段1fを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は電動アシスト自転車と連携して動作するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来の電動アシスト自転車の構成としては、トルクセンサを備えると共に電動アシスト自転車に設けられ人力トルクを検出することによってアシスト駆動力を制御するものが知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−118481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような電動アシスト自転車においてアシスト駆動力を制御する制御方法は、人力トルクを検出した後アシスト駆動を開始するように構成されているため、人体に直接負荷が発生した後にアシスト駆動を行うため足やひざに負荷変動のたびに重さや苦しさを与えてしまうという問題があった。
【0005】
そこで本発明は、従来の問題を解決するためになされたものであって、測位による地形情報や傾斜センサ、ペダル回転数(以下ケイデンス)、スピードセンサ、トルクセンサ、変速器段検出部からの各情報を用いて電動アシスト自転車を制御することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、目的地までの経路を案内することができると共に走行状況に合わせて電動アシスト自転車の駆動力を制御することができるナビゲーション装置であって、現在位置を検出する現在位置検出手段と、道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、傾斜角度を算出する傾斜検出手段と、前記電動アシスト自転車の速度を算出する速度検出手段と、前記電動アシスト自転車のケイデンスを検出するケイデンス検出手段と、前記電動アシスト自転車の変速機の状態を検出する変速機検出手段と、前記電動アシスト自転車の走行時における負荷を検出するトルク検出手段と、前記傾斜検出手段、前記速度検出手段、前記ケイデンス検出手段、前記変速機検出手段、前記トルク検出手段から検出される少なくとも1つ以上の検出結果を記憶する記憶手段と、前記ナビゲーション装置の各部を制御する制御手段と、前記現在位置検出手段で検出された現在位置の前方における道路の情報を前記地図データ保存手段から読み出すと共に前記記憶手段に記憶された検出結果に基づいて前記電動アシスト自転車の前記駆動力を制御するアシスト量演算手段を備えることを特徴とする。
【0007】
また、本発明の前記ナビゲーション装置は、前記制御手段の制御に応じて通知する通知手段を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、GPS受信部と表示部に接続された制御部からなるナビゲーション装置を構成し、その制御部に接続された傾斜センサ、スピードセンサ、ケイデンスセンサ、変速器段検出部、トルクセンサ及び運動パターン記憶部を備え、前記制御部に接続された
アシスト量演算部からのアシスト量出力に応じて、バッテリに蓄えられた電力でアシストモータを駆動する、駆動部とからなる構成とすることにより、進路の地形データ及び各センサからの現在の状態を示すデータを比較することによって、負荷変化を予測し、乗車者の運動能力に最適な、より足やひざに対して負担をかけにくいアシスト機能を得ることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態におけるナビゲーション装置の構成示すブロック図
【図2】本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車を示す模式図
【図3】本発明の実施の形態における自転車のペダル回転数と速度及び理論アシスト量の関係を示す模式図
【図4】本発明の実施の形態におけるナビゲーション装置の動作を示すフロー図
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態におけるナビゲーション装置について図面を参照しながら説明する。
図1は本発明の実施の形態におけるナビゲーション装置の構成を示すブロック図である。
【0011】
以下、本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車について図面を参照しながら説明する。
図1は本発明の実施の形態におけるナビゲーション装置の構成を示すブロック図である。
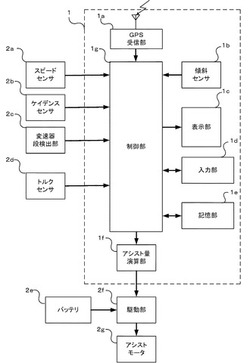
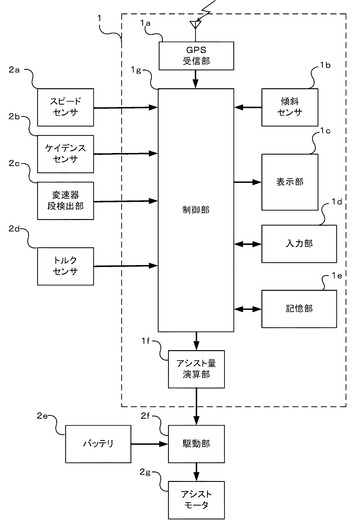
図1に示すように、本願発明のナビゲーション装置1は、GPS受信部1aと、傾斜センサ1bと、表示部1cと、記憶部1eと、アシスト量演算部1fとを備えて構成されている。
【0012】
ここでGPS受信部1aは、衛星から電波を受信し緯度経度を求めることができるように構成されている。
傾斜センサ1bは、ナビゲーション装置1が水平面に対してどれくら傾いているか測定することができるように構成されている。
【0013】
表示部1cは、ナビゲーション装置1における地図データの表示、目的地までの経路の表示、注意地点の表示、案内表示などを行うことができるように構成されている。
入力部1dは、ナビゲーション装置1に対して操作入力を行うことができるように構成されている。例えば、条件設定や目的地設定などの項目を入力又は選択することができるように構成されている。なお、入力部1dの変わりに、表示部1cの表面にタッチパネルを設け、このタッチパネルをタッチ操作することで入力を行うように構成しても同様の効果を得ることができる。
【0014】
記憶部1eは、地図データが記憶されており、この地図データには、道路のリンク情報や、道路毎の勾配、傾斜情報、曲折情報等が記憶されている。また、電動アシスト自転車に設けられているスピードセンサ、ケイデンスセンサ、変速機検出部、トルクセンサからの出力を道路リンク毎に制御部1gの指示に基づいて記憶するように構成されている。
【0015】
アシスト量演算部1fは、電動アシスト自転車の駆動部2fに対してどの程度アシストするほうが最適であるか演算することができるように構成されており、記憶部1eに記憶された道路リンク毎の勾配や傾斜情報、曲折情報に基づいて最適なアシストを行うことができるように駆動部2fを制御することができるように構成されている。また、アシスト
量演算部1fは、電動アシスト自転車に搭載された駆動系の方式や能力にあった信号に変換され出力することができるように構成されている。
【0016】
制御部1gは、ナビゲーション装置1を構成する各部を制御することができるように構成されており、図示しないが、経路探索部や経路案内部の機能を備え、入力部1dから入力される目的地までの経路を探索したりすることができるように構成されている。また、制御部1gはGPS受信部1aから得られる緯度経度情報から記憶部1eに保存されている地図データを用いて現在地周辺の地形及び、現在進んでいる方位の地形データ、すなわち進路の起伏やカーブなどの情報を得ることができ、また傾斜センサ1bから現在地の進行方向の傾斜角を得ることができるように構成されている。また、制御部1gは電動アシスト自転車の現在の情報とこの自転車の乗り手の運動能力や走行パターンを過去の走行から解析、蓄積した運動パターンの記録を記憶部1eから読み出してデータを比較することにより最適なアシスト量情報を出力することができるように構成されている。なお、制御部1gは自転車の乗り手の運動能力や走行パターンを学習して記憶部1eに記憶するように構成することで、アシスト量演算部1fで最適なアシスト量を演算させるための情報を提供することができるように構成されている。
【0017】
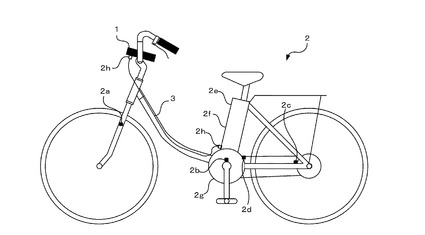
また、本願発明のナビゲーション装置1は、図2に示すように電動アシスト自転車2に接続して、各部から必要な情報を取得することで電動アシスト自転車2の駆動力を制御することができるように構成されている。次に本発明のナビゲーション装置1を備えた電動アシスト自転車2の構成について図面を用いて説明する。図2は、電動アシスト自転車の構成を示す模式図である。図2に示すように、スピードセンサ2aと、ケイデンスセンサ2bと、変速器段検出部2cと、トルクセンサ2dと、駆動部2fと、アシストモータ2gと、バッテリ2eとナビゲーション装置1とを備えて構成されている。
【0018】
ここでスピードセンサ2aは、自転車の走行速度を検出することが出来るように構成されており、例えば、車輪の回転からスピードを検出することができるように構成されている。
ケイデンスセンサ2bは、ペダルの回転数を測定できるように構成されている。
変速器段検出部2cは、電動アシスト自転車2に搭載されている変速機段の位置の状態を検出することができるように構成されており、変速機のギア等の段を検出することで、電動アシスト自転車がどのような速度で走行しているか把握することができるように構成されている。なお変速機段が無い電動アシスト自転車の場合でも本願発明の構成に特に影響することはなく、適切な状況でアシストすることができるように構成されている。
【0019】
トルクセンサ2dは、電動アシスト自転車2が走行しているときにかかる荷重を検出することができるように構成されたものであって、このトルクセンサ2dを設けてあることで、例えば、坂道などによってどの程度の負荷がかかっているか検出することができるように構成されている。
【0020】
駆動部2fは、バッテリ2eからアシストモータ2gに供給する電力量を制御することができるように構成されると共に、ナビゲーション装置1のアシスト量演算部1fからの指示に基づいてアシストモータ2gに流すバッテリの電力量を制御することができるように構成されている。なお、電動アシスト自転車にナビゲーション装置1が接続されていないときは、スピードセンサ2a、トルクセンサ2d、変速器段検出部2c、トルクセンサ2dから出力される数値に基づいてアシストモータ2gを制御するようにバッテリ2eの供給量を調整することが出来るように構成されている。
【0021】
バッテリ2eは、駆動部2fからの指示に基づいてアシストモータ2gに電力供給を行うことはできるように構成されている。また、電動アシスト自転車2が停止する際にアシ
ストモータ2gが発生する回生電力を駆動部2fの制御に基づいて充電することもできるように構成されている。
アシストモータ2gは、駆動部2fからの制御によってバッテリ2eの電力を用いて駆動させることができるように構成されている。また、電動アシスト自転車の停止時に発生する回生電力は、駆動部2fを介してバッテリ2eに充電を行うことができるように構成されている。なお、充電管理は、駆動部2fで処理を行うことができるように構成されている。
【0022】
このように構成された電動アシスト自転車2に取り付けられたナビゲーション装置1は、図2に示すように、ナビゲーション装置1は自転車のハンドル部に装着され、自転車に取り付けられたスピードセンサ2a、ケイデンスセンサ2b、変速器段検出部2cとトルクセンサ2dからの情報信号をナビゲーション装置1に、またナビゲーション装置1のアシスト量演算部1fが出力するアシスト量信号を駆動部2fに伝送するために、バスライン3とコネクタ2hによって、ナビゲーション装置1と自転車本体とが接続されて構成されている。
【0023】
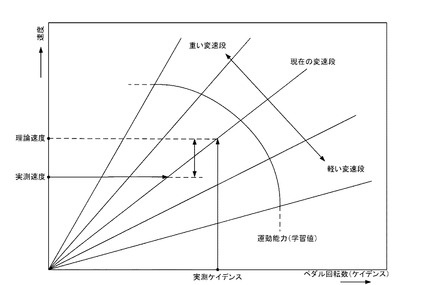
次に、本発明において、自転車のペダル回転数と理論速度及び実測速度の関係に関して図を用いて説明する。図3は、ペダル回転数と理論速度及び実測速度の関係を示す模式図である。
図3に示すのは、本発明のナビゲーション装置1は、スピードセンサ2aとケイデンスセンサ2b及び、変速器段検出部2cから各検出された出力を用いて、現在の走行状況を推測するための考え方の1例を示すものである。
【0024】
電動アシスト自転車2の変速器段検出部2cで検出された変速器段に対してケイデンスセンサ2bで測定したケイデンスが測定されると、例えば、平地で等速運動をしている場合、理論速度と実測速度は一致すると考えられる。一方、坂道や風による負荷変動が発生した場合や下り坂や追い風の場合には、実測速度が理論速度より大きくなり、上り坂や向かい風の場合実測速度が理論速度より小さくなる。
また、乗車者の運動能力は、この図上運動能力のカーブのように表現することができ、過去の走行時のデータより蓄積する。
【0025】
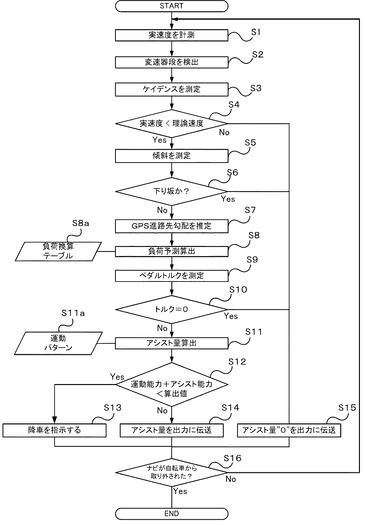
次に、本発明のナビゲーション装置1を備えた電動アシスト自転車2の動作についてフローチャートを用いて説明する。図4は、本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車の制御を示すフロー図である。
【0026】
図4に示すように、本発明のナビゲーション装置1を搭載した電動アシスト自転車2は、スピードセンサ2aで実速度を測定し(S1)、ケイデンスセンサ2bでケイデンスを計測し(S2)、変速器段検出部2cで変速器の段を計測し(S3)、S1、S2、S3で測定した値の実速度と理論値とではどちらが大きいかを判断し(S4)、S4において理論値よりも実速度が大きいと判断した場合には(S4、No)、アシスト不要と判断しアシスト量を「0」として出力する(S15)。また、S4において理論値よりも実速度が小さいと判断した場合には(S4、YES)、次に傾斜センサ1bを用いて走行している道路の傾斜角度を測定する(S5)。S5において傾斜センサ1bから得られた数値から現在地が下り坂であると判断すると(S6、Yes)、安全のためアシスト量を「0」として出力する(S15)。また、S6において下り坂ではないと判断した場合には(S6、No)、GPS受信部1aで取得したGPS測位で得られた進路先情報よりこの先勾配がどのように変化するかを推定し(S7)、負荷換算テーブルS8aを用いて負荷予測を算出する(S8)。
【0027】
次に、S8で負荷予測を算出後、トルクセンサ2dで実負荷を計測する(S9)。S9
でトルクセンサ2dで計測された実負荷が「0」であった場合は(S10、Yes)、走行状態ではないと判断することができペダルを漕いでいない状態のため、アシスト量を「0」として出力する(S15)。また、S10においてトルクセンサ2dの値においてトルク値が「0」でない場合には(S10、No)、運動パターンS11aを用いてアシスト量を算出する(S11)。このとき、S11aにおいて負荷変化予測値及び乗車者の運動パターン(運動能力)データにより次回のアシスト量に対して変化が滑らかになるように、かつ、乗車者の運動能力に応じたアシスト量を加減算するようなアシスト量を算出するように構成されている(S11)。
【0028】
S11で算出されたアシスト量の値が、乗車者の運動能力と自転車のアシスト能力を加算したものに対して大きいか判定を行う(S12)。S12において、S11で算出されたアシスト量の値が大きいと判定されると(S12、Yes)、現在いる場所の進路に急坂などがあることにより電動アシスト自転車2に乗車して走行することは不可能と予測されるため降車を指示して、坂にかかる前に停車を促しアシストを弱める動作を行う(S13)。また、S12においてS11で算出されたアシスト量の値が小さいと判定されると(S12、No)、十分アシスト可能と判断し、S11で算出したアシスト量を駆動部2fに伝送しアシストモータ2gを制御することができるよう構成されている。また、S13、14、S15の処理の後、ナビゲーション装置1が電動アシスト自転車2から取り外されたか否かを判断し(S16)、S16においてナビゲーション装置1が電動アシスト自転車2から取り外されていないと判断したときは(S16、No)、S1に戻り処理を繰り返し、S16においてナビゲーション装置1が電動アシスト自転車2から取り外されたと判断したときは(S16、Yes)、処理を終了する。
【0029】
以上のように本発明のナビゲーション装置は、電動アシスト自転車2に設けられた傾斜センサ1b、スピードセンサ2a、ケイデンスセンサ2b、変速器段検出部2c、トルクセンサ2dから情報を取得し、取得した情報から制御部に接続されたアシスト量演算部を用いてアシスト量出力を算出し、算出したアシスト量を、電動アシスト自転車2に搭載された駆動部2fに伝送し、伝送された情報に基づいて駆動部2fからアシストモータ2gを動作させることができる。このため、進路の地形データ及び各センサからの現在の状態を示すデータを比較することによって、負荷変化を予測し、乗車者の運動能力に最適な、より足やひざに対して負担をかけにくいアシスト機能を得ることができる。また、本実施の形態において、ナビゲーション装置1による目的地へのルート案内において高低さの少ないルートを選択させることもできるので足やひざへの負担をかけにくいという効果を得ることができる。
【産業上の利用可能性】
【0030】
本発明の自転車アシスト及びナビゲーション装置は、人力による移動手段、装置として有用である。
【符号の説明】
【0031】
1 ナビゲーション装置
1a GPS受信部
1b 傾斜センサ
1c 表示部
1d 入力部
1e 記憶部
1f アシスト量演算部
1g 制御部
2 電動アシスト自転車
2a スピードセンサ
2b ケイデンスセンサ(ペダル回転数センサ)
2c 変速器段検出部
2d トルクセンサ
2e バッテリ
2f 駆動部
2g アシストモータ
2h コネクタ
3 バスライン
【技術分野】
【0001】
本発明は電動アシスト自転車と連携して動作するナビゲーション装置に関するものである。
【背景技術】
【0002】
従来の電動アシスト自転車の構成としては、トルクセンサを備えると共に電動アシスト自転車に設けられ人力トルクを検出することによってアシスト駆動力を制御するものが知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−118481号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような電動アシスト自転車においてアシスト駆動力を制御する制御方法は、人力トルクを検出した後アシスト駆動を開始するように構成されているため、人体に直接負荷が発生した後にアシスト駆動を行うため足やひざに負荷変動のたびに重さや苦しさを与えてしまうという問題があった。
【0005】
そこで本発明は、従来の問題を解決するためになされたものであって、測位による地形情報や傾斜センサ、ペダル回転数(以下ケイデンス)、スピードセンサ、トルクセンサ、変速器段検出部からの各情報を用いて電動アシスト自転車を制御することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、目的地までの経路を案内することができると共に走行状況に合わせて電動アシスト自転車の駆動力を制御することができるナビゲーション装置であって、現在位置を検出する現在位置検出手段と、道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、傾斜角度を算出する傾斜検出手段と、前記電動アシスト自転車の速度を算出する速度検出手段と、前記電動アシスト自転車のケイデンスを検出するケイデンス検出手段と、前記電動アシスト自転車の変速機の状態を検出する変速機検出手段と、前記電動アシスト自転車の走行時における負荷を検出するトルク検出手段と、前記傾斜検出手段、前記速度検出手段、前記ケイデンス検出手段、前記変速機検出手段、前記トルク検出手段から検出される少なくとも1つ以上の検出結果を記憶する記憶手段と、前記ナビゲーション装置の各部を制御する制御手段と、前記現在位置検出手段で検出された現在位置の前方における道路の情報を前記地図データ保存手段から読み出すと共に前記記憶手段に記憶された検出結果に基づいて前記電動アシスト自転車の前記駆動力を制御するアシスト量演算手段を備えることを特徴とする。
【0007】
また、本発明の前記ナビゲーション装置は、前記制御手段の制御に応じて通知する通知手段を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、GPS受信部と表示部に接続された制御部からなるナビゲーション装置を構成し、その制御部に接続された傾斜センサ、スピードセンサ、ケイデンスセンサ、変速器段検出部、トルクセンサ及び運動パターン記憶部を備え、前記制御部に接続された
アシスト量演算部からのアシスト量出力に応じて、バッテリに蓄えられた電力でアシストモータを駆動する、駆動部とからなる構成とすることにより、進路の地形データ及び各センサからの現在の状態を示すデータを比較することによって、負荷変化を予測し、乗車者の運動能力に最適な、より足やひざに対して負担をかけにくいアシスト機能を得ることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態におけるナビゲーション装置の構成示すブロック図
【図2】本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車を示す模式図
【図3】本発明の実施の形態における自転車のペダル回転数と速度及び理論アシスト量の関係を示す模式図
【図4】本発明の実施の形態におけるナビゲーション装置の動作を示すフロー図
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態におけるナビゲーション装置について図面を参照しながら説明する。
図1は本発明の実施の形態におけるナビゲーション装置の構成を示すブロック図である。
【0011】
以下、本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車について図面を参照しながら説明する。
図1は本発明の実施の形態におけるナビゲーション装置の構成を示すブロック図である。
図1に示すように、本願発明のナビゲーション装置1は、GPS受信部1aと、傾斜センサ1bと、表示部1cと、記憶部1eと、アシスト量演算部1fとを備えて構成されている。
【0012】
ここでGPS受信部1aは、衛星から電波を受信し緯度経度を求めることができるように構成されている。
傾斜センサ1bは、ナビゲーション装置1が水平面に対してどれくら傾いているか測定することができるように構成されている。
【0013】
表示部1cは、ナビゲーション装置1における地図データの表示、目的地までの経路の表示、注意地点の表示、案内表示などを行うことができるように構成されている。
入力部1dは、ナビゲーション装置1に対して操作入力を行うことができるように構成されている。例えば、条件設定や目的地設定などの項目を入力又は選択することができるように構成されている。なお、入力部1dの変わりに、表示部1cの表面にタッチパネルを設け、このタッチパネルをタッチ操作することで入力を行うように構成しても同様の効果を得ることができる。
【0014】
記憶部1eは、地図データが記憶されており、この地図データには、道路のリンク情報や、道路毎の勾配、傾斜情報、曲折情報等が記憶されている。また、電動アシスト自転車に設けられているスピードセンサ、ケイデンスセンサ、変速機検出部、トルクセンサからの出力を道路リンク毎に制御部1gの指示に基づいて記憶するように構成されている。
【0015】
アシスト量演算部1fは、電動アシスト自転車の駆動部2fに対してどの程度アシストするほうが最適であるか演算することができるように構成されており、記憶部1eに記憶された道路リンク毎の勾配や傾斜情報、曲折情報に基づいて最適なアシストを行うことができるように駆動部2fを制御することができるように構成されている。また、アシスト
量演算部1fは、電動アシスト自転車に搭載された駆動系の方式や能力にあった信号に変換され出力することができるように構成されている。
【0016】
制御部1gは、ナビゲーション装置1を構成する各部を制御することができるように構成されており、図示しないが、経路探索部や経路案内部の機能を備え、入力部1dから入力される目的地までの経路を探索したりすることができるように構成されている。また、制御部1gはGPS受信部1aから得られる緯度経度情報から記憶部1eに保存されている地図データを用いて現在地周辺の地形及び、現在進んでいる方位の地形データ、すなわち進路の起伏やカーブなどの情報を得ることができ、また傾斜センサ1bから現在地の進行方向の傾斜角を得ることができるように構成されている。また、制御部1gは電動アシスト自転車の現在の情報とこの自転車の乗り手の運動能力や走行パターンを過去の走行から解析、蓄積した運動パターンの記録を記憶部1eから読み出してデータを比較することにより最適なアシスト量情報を出力することができるように構成されている。なお、制御部1gは自転車の乗り手の運動能力や走行パターンを学習して記憶部1eに記憶するように構成することで、アシスト量演算部1fで最適なアシスト量を演算させるための情報を提供することができるように構成されている。
【0017】
また、本願発明のナビゲーション装置1は、図2に示すように電動アシスト自転車2に接続して、各部から必要な情報を取得することで電動アシスト自転車2の駆動力を制御することができるように構成されている。次に本発明のナビゲーション装置1を備えた電動アシスト自転車2の構成について図面を用いて説明する。図2は、電動アシスト自転車の構成を示す模式図である。図2に示すように、スピードセンサ2aと、ケイデンスセンサ2bと、変速器段検出部2cと、トルクセンサ2dと、駆動部2fと、アシストモータ2gと、バッテリ2eとナビゲーション装置1とを備えて構成されている。
【0018】
ここでスピードセンサ2aは、自転車の走行速度を検出することが出来るように構成されており、例えば、車輪の回転からスピードを検出することができるように構成されている。
ケイデンスセンサ2bは、ペダルの回転数を測定できるように構成されている。
変速器段検出部2cは、電動アシスト自転車2に搭載されている変速機段の位置の状態を検出することができるように構成されており、変速機のギア等の段を検出することで、電動アシスト自転車がどのような速度で走行しているか把握することができるように構成されている。なお変速機段が無い電動アシスト自転車の場合でも本願発明の構成に特に影響することはなく、適切な状況でアシストすることができるように構成されている。
【0019】
トルクセンサ2dは、電動アシスト自転車2が走行しているときにかかる荷重を検出することができるように構成されたものであって、このトルクセンサ2dを設けてあることで、例えば、坂道などによってどの程度の負荷がかかっているか検出することができるように構成されている。
【0020】
駆動部2fは、バッテリ2eからアシストモータ2gに供給する電力量を制御することができるように構成されると共に、ナビゲーション装置1のアシスト量演算部1fからの指示に基づいてアシストモータ2gに流すバッテリの電力量を制御することができるように構成されている。なお、電動アシスト自転車にナビゲーション装置1が接続されていないときは、スピードセンサ2a、トルクセンサ2d、変速器段検出部2c、トルクセンサ2dから出力される数値に基づいてアシストモータ2gを制御するようにバッテリ2eの供給量を調整することが出来るように構成されている。
【0021】
バッテリ2eは、駆動部2fからの指示に基づいてアシストモータ2gに電力供給を行うことはできるように構成されている。また、電動アシスト自転車2が停止する際にアシ
ストモータ2gが発生する回生電力を駆動部2fの制御に基づいて充電することもできるように構成されている。
アシストモータ2gは、駆動部2fからの制御によってバッテリ2eの電力を用いて駆動させることができるように構成されている。また、電動アシスト自転車の停止時に発生する回生電力は、駆動部2fを介してバッテリ2eに充電を行うことができるように構成されている。なお、充電管理は、駆動部2fで処理を行うことができるように構成されている。
【0022】
このように構成された電動アシスト自転車2に取り付けられたナビゲーション装置1は、図2に示すように、ナビゲーション装置1は自転車のハンドル部に装着され、自転車に取り付けられたスピードセンサ2a、ケイデンスセンサ2b、変速器段検出部2cとトルクセンサ2dからの情報信号をナビゲーション装置1に、またナビゲーション装置1のアシスト量演算部1fが出力するアシスト量信号を駆動部2fに伝送するために、バスライン3とコネクタ2hによって、ナビゲーション装置1と自転車本体とが接続されて構成されている。
【0023】
次に、本発明において、自転車のペダル回転数と理論速度及び実測速度の関係に関して図を用いて説明する。図3は、ペダル回転数と理論速度及び実測速度の関係を示す模式図である。
図3に示すのは、本発明のナビゲーション装置1は、スピードセンサ2aとケイデンスセンサ2b及び、変速器段検出部2cから各検出された出力を用いて、現在の走行状況を推測するための考え方の1例を示すものである。
【0024】
電動アシスト自転車2の変速器段検出部2cで検出された変速器段に対してケイデンスセンサ2bで測定したケイデンスが測定されると、例えば、平地で等速運動をしている場合、理論速度と実測速度は一致すると考えられる。一方、坂道や風による負荷変動が発生した場合や下り坂や追い風の場合には、実測速度が理論速度より大きくなり、上り坂や向かい風の場合実測速度が理論速度より小さくなる。
また、乗車者の運動能力は、この図上運動能力のカーブのように表現することができ、過去の走行時のデータより蓄積する。
【0025】
次に、本発明のナビゲーション装置1を備えた電動アシスト自転車2の動作についてフローチャートを用いて説明する。図4は、本発明の実施の形態におけるナビゲーション装置を装着した電動アシスト自転車の制御を示すフロー図である。
【0026】
図4に示すように、本発明のナビゲーション装置1を搭載した電動アシスト自転車2は、スピードセンサ2aで実速度を測定し(S1)、ケイデンスセンサ2bでケイデンスを計測し(S2)、変速器段検出部2cで変速器の段を計測し(S3)、S1、S2、S3で測定した値の実速度と理論値とではどちらが大きいかを判断し(S4)、S4において理論値よりも実速度が大きいと判断した場合には(S4、No)、アシスト不要と判断しアシスト量を「0」として出力する(S15)。また、S4において理論値よりも実速度が小さいと判断した場合には(S4、YES)、次に傾斜センサ1bを用いて走行している道路の傾斜角度を測定する(S5)。S5において傾斜センサ1bから得られた数値から現在地が下り坂であると判断すると(S6、Yes)、安全のためアシスト量を「0」として出力する(S15)。また、S6において下り坂ではないと判断した場合には(S6、No)、GPS受信部1aで取得したGPS測位で得られた進路先情報よりこの先勾配がどのように変化するかを推定し(S7)、負荷換算テーブルS8aを用いて負荷予測を算出する(S8)。
【0027】
次に、S8で負荷予測を算出後、トルクセンサ2dで実負荷を計測する(S9)。S9
でトルクセンサ2dで計測された実負荷が「0」であった場合は(S10、Yes)、走行状態ではないと判断することができペダルを漕いでいない状態のため、アシスト量を「0」として出力する(S15)。また、S10においてトルクセンサ2dの値においてトルク値が「0」でない場合には(S10、No)、運動パターンS11aを用いてアシスト量を算出する(S11)。このとき、S11aにおいて負荷変化予測値及び乗車者の運動パターン(運動能力)データにより次回のアシスト量に対して変化が滑らかになるように、かつ、乗車者の運動能力に応じたアシスト量を加減算するようなアシスト量を算出するように構成されている(S11)。
【0028】
S11で算出されたアシスト量の値が、乗車者の運動能力と自転車のアシスト能力を加算したものに対して大きいか判定を行う(S12)。S12において、S11で算出されたアシスト量の値が大きいと判定されると(S12、Yes)、現在いる場所の進路に急坂などがあることにより電動アシスト自転車2に乗車して走行することは不可能と予測されるため降車を指示して、坂にかかる前に停車を促しアシストを弱める動作を行う(S13)。また、S12においてS11で算出されたアシスト量の値が小さいと判定されると(S12、No)、十分アシスト可能と判断し、S11で算出したアシスト量を駆動部2fに伝送しアシストモータ2gを制御することができるよう構成されている。また、S13、14、S15の処理の後、ナビゲーション装置1が電動アシスト自転車2から取り外されたか否かを判断し(S16)、S16においてナビゲーション装置1が電動アシスト自転車2から取り外されていないと判断したときは(S16、No)、S1に戻り処理を繰り返し、S16においてナビゲーション装置1が電動アシスト自転車2から取り外されたと判断したときは(S16、Yes)、処理を終了する。
【0029】
以上のように本発明のナビゲーション装置は、電動アシスト自転車2に設けられた傾斜センサ1b、スピードセンサ2a、ケイデンスセンサ2b、変速器段検出部2c、トルクセンサ2dから情報を取得し、取得した情報から制御部に接続されたアシスト量演算部を用いてアシスト量出力を算出し、算出したアシスト量を、電動アシスト自転車2に搭載された駆動部2fに伝送し、伝送された情報に基づいて駆動部2fからアシストモータ2gを動作させることができる。このため、進路の地形データ及び各センサからの現在の状態を示すデータを比較することによって、負荷変化を予測し、乗車者の運動能力に最適な、より足やひざに対して負担をかけにくいアシスト機能を得ることができる。また、本実施の形態において、ナビゲーション装置1による目的地へのルート案内において高低さの少ないルートを選択させることもできるので足やひざへの負担をかけにくいという効果を得ることができる。
【産業上の利用可能性】
【0030】
本発明の自転車アシスト及びナビゲーション装置は、人力による移動手段、装置として有用である。
【符号の説明】
【0031】
1 ナビゲーション装置
1a GPS受信部
1b 傾斜センサ
1c 表示部
1d 入力部
1e 記憶部
1f アシスト量演算部
1g 制御部
2 電動アシスト自転車
2a スピードセンサ
2b ケイデンスセンサ(ペダル回転数センサ)
2c 変速器段検出部
2d トルクセンサ
2e バッテリ
2f 駆動部
2g アシストモータ
2h コネクタ
3 バスライン
【特許請求の範囲】
【請求項1】
目的地までの経路を案内することができると共に走行状況に合わせて電動アシスト自転車の駆動力を制御することができるナビゲーション装置であって、
現在位置を検出する現在位置検出手段と、
道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、
傾斜角度を算出する傾斜検出手段と、
前記電動アシスト自転車の速度を算出する速度検出手段と、
前記電動アシスト自転車のケイデンスを検出するケイデンス検出手段と、
前記電動アシスト自転車の変速機の状態を検出する変速機検出手段と、
前記電動アシスト自転車の走行時における負荷を検出するトルク検出手段と、
前記傾斜検出手段、前記速度検出手段、前記ケイデンス検出手段、前記変速機検出手段、前記トルク検出手段から検出される少なくとも1つ以上の検出結果を記憶する記憶手段と、
前記ナビゲーション装置の各部を制御する制御手段と、
前記現在位置検出手段で検出された現在位置の前方における道路の情報を前記地図データ保存手段から読み出すと共に前記記憶手段に記憶された検出結果に基づいて前記電動アシスト自転車の前記駆動力を制御するアシスト量演算手段を備えることを特徴とするナビゲーション装置。
【請求項2】
前記ナビゲーション装置は、前記制御手段の制御に応じて通知する通知手段を備えることを特徴とする請求項1に記載のナビゲーション装置。
【請求項1】
目的地までの経路を案内することができると共に走行状況に合わせて電動アシスト自転車の駆動力を制御することができるナビゲーション装置であって、
現在位置を検出する現在位置検出手段と、
道路の形状や道路の傾斜角の詳細な地図データが記録された地図データ保存手段と、
傾斜角度を算出する傾斜検出手段と、
前記電動アシスト自転車の速度を算出する速度検出手段と、
前記電動アシスト自転車のケイデンスを検出するケイデンス検出手段と、
前記電動アシスト自転車の変速機の状態を検出する変速機検出手段と、
前記電動アシスト自転車の走行時における負荷を検出するトルク検出手段と、
前記傾斜検出手段、前記速度検出手段、前記ケイデンス検出手段、前記変速機検出手段、前記トルク検出手段から検出される少なくとも1つ以上の検出結果を記憶する記憶手段と、
前記ナビゲーション装置の各部を制御する制御手段と、
前記現在位置検出手段で検出された現在位置の前方における道路の情報を前記地図データ保存手段から読み出すと共に前記記憶手段に記憶された検出結果に基づいて前記電動アシスト自転車の前記駆動力を制御するアシスト量演算手段を備えることを特徴とするナビゲーション装置。
【請求項2】
前記ナビゲーション装置は、前記制御手段の制御に応じて通知する通知手段を備えることを特徴とする請求項1に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−121338(P2012−121338A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271049(P2010−271049)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]