
ナビゲーション装置
【課題】ルート案内中でなくても歩車分離信号の存在する交差点に対してより適切な見切り発車防止案内を行うことができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に搭載されたナビゲーション装置であって、現在位置を検出する現在位置検出手段と、歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、前記車両が停止であるか否かを判断する停止判断手段と、前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段とを備えて構成されている。
【解決手段】車両に搭載されたナビゲーション装置であって、現在位置を検出する現在位置検出手段と、歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、前記車両が停止であるか否かを判断する停止判断手段と、前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段とを備えて構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は電子道路地図上に現在位置を表示するとともに目的地を設定して経路案内を行うことができるナビゲーション装置に関する。
【背景技術】
【0002】
従来の交差点案内をするナビゲーション装置としては、スクランブル交差点コストを反映したルート探索しているものが知られている(例えば特許文献1参照)。また、ルート案内中に属性(例えば時差式、矢印式)を持つ信号機情報を事前に案内するナビゲーション装置が知られている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−174575号公報
【特許文献2】特開2007−232573号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の交差点案内をするナビゲーション装置においては、目的地を設定したルート案内中でなければスクランブル交差点を回避するルート探索をしたり、ルート案内中における信号機情報を事前に案内することはできないという問題があった。また車の走行中に必ずしも必要の無い信号機情報を事前案内してしまうという問題があった。
【0005】
そこで本発明は、従来の問題を解決するためになされたものであって、ルート案内中でなくても歩車分離信号の存在する交差点に対してより適切な見切り発車防止案内を行うことができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明のナビゲーション装置は、車両に搭載されたナビゲーション装置であって、現在位置を検出する現在位置検出手段と、歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、前記車両が停止であるか否かを判断する停止判断手段と、前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段と、を備えたことを特徴とする。
【0007】
このように構成された本発明のナビゲーション装置によれば、歩車分離信号に先頭で接近して停止した際にルート案内中でなくても歩車分離信号の切り発車防止案内が可能になる。
【0008】
また、本発明のナビゲーション装置の前記接近判断手段は、前記現在位置検出手段で検出される現在位置の緯度経度情報と、前記地図データ記憶部に記憶されている歩車分離信号交差点データの緯度経度情報から判断することを特徴とする。
【0009】
このように構成された本発明のナビゲーション装置によれば、現在位置検出手段で検出された現在位置の緯度経度情報を用いて地図データ記憶部に記憶されている歩車分離信号
交差点データの緯度経度情報と比較することで接近しているか否かを判断することができる。
【発明の効果】
【0010】
本発明によれば、歩車分離信号の存在する交差点に対して先頭で接近して停止した場合見切り発車防止案内が可能になる、また接近が先頭以外あるいは停止しない場合は案内しないため不要な案内防止が可能になる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態におけるナビゲーション装置の構成を示すブロック図
【図2】本発明の実施形態におけるナビゲーション装置の動作を示すフロー図
【図3】自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方を示す模式図
【図4】先頭判断部において自車が交差点先頭に位置するか否かの調べ方を示す模式図
【図5】本発明の実施形態における動作を説明する模式図
【発明を実施するための形態】
【0012】
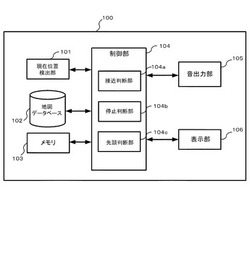
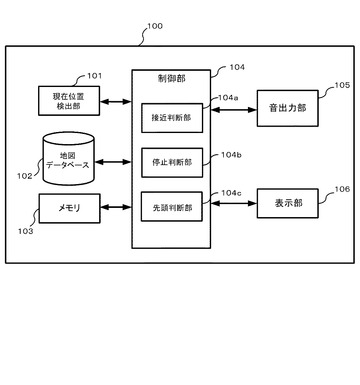
以下、本発明の実施形態におけるナビゲーション装置について図面を参照しながら説明する。図1は本発明の実施形態におけるナビゲーション装置の構成を示すブロック図である。
【0013】
図1に示すように本発明実施形態におけるナビゲーション装置100は、現在位置検出部101と、地図データベース102と、メモリ103と、制御部104と、音出力部105と、表示部106で構成されている。
【0014】
ここで、現在位置検出部101は、現在位置を緯度経度を取得することができるように構成されている。
地図データベース102は、表示を行う電子地図データの道路地図が保存されると共に、道路地図における交差点の情報としては歩車分離信号有無情報が保存されて構成されている。
メモリ103は、ナビゲーション装置100が動作する際に、一時的にデータを保存することができ、制御部104が動作するにあたって利用されるものである。
【0015】
制御部104は、接近判断部104aと、停止判断部104bと、先頭判断部104cから構成され、ナビゲーション装置100の動作を制御することができるように構成されている。
ここで接近判断部104aは、現在位置検出部101で取得した現在位置の周辺に歩車分離信号情報を持つ交差点が存在するか否かを地図データベース102に保存されている道路地図を用いて判断できるように構成されている。
停止判断部104bは、現在位置検出部101で検出された現在位置の変動が一定期間更新されないときに車両が停止していると判断することができるように構成されている。また、車両から供給される車速パルスから車両が停止しているか否かを停止判断部104bで判断するようにしてもよく、また、現在位置検出部101の現在位置の変動と車速パルスを用いて車両の停止を判断するように構成しても同様の効果を得ることができる。
先頭判断部104cは、現在位置検出部101で取得した現在位置が地図データベース102の道路上に位置し、その道路の直近に歩車分離信号情報を持つ交差点が存在する場合に先頭と判断できるようになっている。
制御部104は先頭判断部が先頭と判断した場合に拡大図表示や音声案内を行うことができるように構成されている。
【0016】
音出力部105は、音案内を出力することができるように構成されており、例えば、スピーカで構成されている。
【0017】
表示部106は、ナビゲーション装置100における地図データ、現在位置、任意の位置における詳細情報を表示することができるように構成されている。なお、表示部106の表示は制御部104によって制御さえるように構成されている。
【0018】
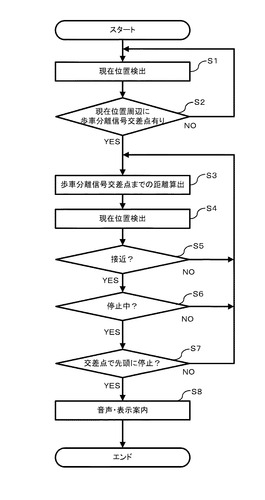
次に、上記で説明した本発明の実施形態におけるナビゲーション装置の動作についてフローチャートを用いて説明する。図2は本発明の実施形態におけるナビゲーション装置の動作を示すフローチャートである。
【0019】
図2に示すように、本発明の実施形態におけるナビゲーション装置100は、まず現在位置検出部101で現在位置を検出する(S1)。S1で検出された現在位置に該当する道路データ及び近傍の交差点データを地図データベース102に保存された電子地図データから取得し道路データに現在位置を対応付ける。尚、現在位置検出部101はこの後メインフローとは別に定期的に上記処理を行う。また、定期的とは例えば1秒単位とする。
【0020】
次に、S1で検出された現在位置周辺に歩車分離信号交差点があるか否かを地図データベースに保存された電子地図データで検索を行う(S2)。S2において現在位置周辺に歩車分離信号交差点が無いと判断されると(S2、NO)、再度現在位置の変化がないかS1に戻って測定を行う。また、S2において現在位置周辺に歩車分離信号交差点が有ると判断されると(S2、YES)、S1で検出された現在位置とS2で検索された歩車分離信号交差点までの距離を算出する(S3)。そして再度、現在位置検出部101で現在位置を検出し(S4)、S1で検出した現在位置の緯度経度とS4検出した緯度経度の変化量から現在位置から歩車分離信号交差点が接近しているか否かを接近判断部104aで判断する(S5)。S5において接近していないと判断すると(S5、NO)、S3に戻って処理を行う。またS5において現在位置が歩車分離信号交差点に接近していると接近判断部104aで判断されると(S5、YES)、車両が停止中であるか否かを停止判断部104bで判断する(S6)。S6で車両が停止していないと判断された場合には(S6、NO)、S3に戻って処理を繰り返す。S6において停止判断部104bで車両が停止していると判断すると(S6、YES)、車両の現在位置が歩車分離信号交差点の先頭に停止しているか否かを先頭判断部104cで判断する(S7)。S7において車両の停止している位置が歩車分離交差点の先頭ではないと判断されると(S7、NO)、S3に戻り処理を行う。また、先頭判断部104cで車両が歩車分離信号交差点の先頭に停止していると判断されると(S7、YES)、音出力部105や表示部106を用いて歩車分離案内交差点に停車していることを音声や表示案内を行う(S8)。
なお、停止判断部104bにおいて、車両の停止時間が例えば1秒の場合を停止中と判断し、1秒未満の場合には車両が停止していないと判断するようにしている。
【0021】
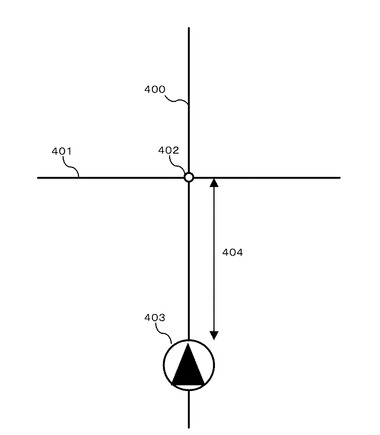
ここで、ナビゲーション装置100の制御部104においてS1で取得した現在位置に対応する道路データの自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方について図面を用いて説明する。図3は、自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方を示す模式図である。
【0022】
図3に示すように、自車走行道路400とこの自車走行道路400と交差している交差道路401と、自車走行道路400と交差道路401が交差する点の交差点402と、自車位置を自車403とし、自車403から交差点402までの道のり距離を距離404として説明する。
自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方は、まず、制御部104で自車403から前方の歩車分離信号の存在する交差点402までの道のり距離404を算出する。接近判断部104aは、制御部104で算出された距離404が交差点ま
での道のり距離が閾値以下であるか否かを判断し、交差点に接近していると判断して次に進む。なお、閾値は例えば100mとすることで100m未満であれば現在位置から歩車分離信号交差点があると判断し、100m以上あれば歩車分離信号交差点が無いと判断することができる。
【0023】
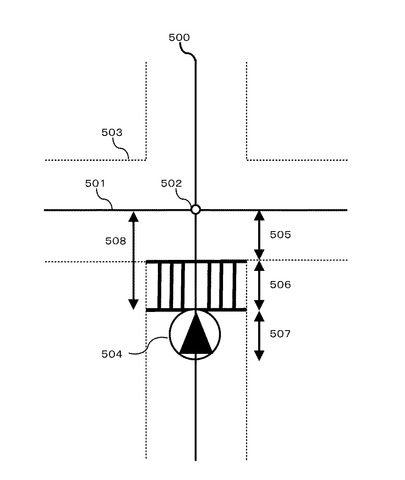
次に図4を用いて先頭判断部104cが自車が交差点先頭に位置するかの判断について説明する。図4は、先頭判断部において自車が交差点先頭に位置するか否かの調べ方を示す模式図である。
【0024】
図4に示すように、自車走行道路500と自車走行道路500と交差している交差道路501と、自車走行道路500と交差道路501が交差する点の交差点502と、道路の幅を示す道路幅503と、自車位置を自車位置504とし、地図データベース102より読み込んだ交差道路の片側車線の幅員を幅員505と、地図データベース102より読み込んだ横断歩道の幅員506と、自車の全長を車長507と、自車から交差点までの距離を距離508として説明する。なお、先頭判断部104cは自車から交差点までの距離508≦(道路データの幅員505+横断歩道の幅員506+自車の全長507)であれば交差点の先頭に停車している判断するように構成されている。
【0025】
なお、先頭判断部において自車が交差点先頭に位置するか否かの調べ方については特に限定されるものではなく、例えば、車載カメラを用いて横断歩道を認識することによって前方に車が存在しないことを認識させても良く、また近接センサーを用いて前方に車が存在しないことを認識させても良い。
【0026】
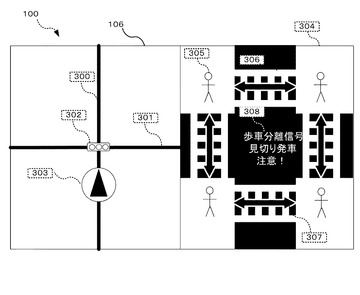
次に、本発明の実施形態におけるナビゲーション装置の具体的な表示方法について模式図を用いて説明する。図5は、本発明におけるナビゲーション装置の表示例を示す模式図である。
【0027】
図5に示すように、ナビゲーション装置100の表示部106に表示された電子地図データには、進行道路300、交差道路301、交差点302、現在位置303を表示し、例えば、交差点302が歩車分離信号付の交差点で、現在位置303がその先頭に位置した場合、表示部交差点に歩車分離をイメージした拡大画面304及びメッセージ308を表示することで、車両を運転している人に現在停車している交差点が歩車分離信号交差点であることを通知することができる。なお、図5にいて、歩行者を歩行者305、横断歩道を横断歩道306、歩行者の通行可能方向を示す歩行者通行可能方向を歩行者通行可能方向307として表記してある。
【0028】
以上のように本発明の実施形態によれば、歩車分離信号情報を含む地図データベース102及び停止判断部104b及び先頭判断部104cを用いて歩車分離信号交差点の先頭で停止したか否かを判断し、歩車分離信号交差点に停止していると判断したときに、歩車分離信号交差点であることを気がつかずに運転者の見切り発車を防止する注意喚起を行うことができる。
【産業上の利用可能性】
【0029】
本発明は、自車前方にある交差点の種類を現在位置から判断し、交差点の種類に応じて適切な交差点に関する注意換気を行うことができるナビゲーション装置における走行支援として有用である。
【符号の説明】
【0030】
100 ナビゲーション装置
101 現在位置検出部
102 地図データベース
103 メモリ
104 制御部
104a 接近判断部
104b 停止判断部
104c 先頭判断部
105 音出力部
106 表示部
300 進行道路
301 交差道路
302 交差点
303 現在位置
304 拡大画面
305 歩行者
306 横断歩道
307 歩行者通行可能方向
400 自車走行道路
401 交差道路
402 交差点
403 自車
404 距離
500 自車走行道路
501 交差道路
502 交差点
503 道路幅
504 自車位置
505 幅員
506 幅員
507 車長
508 距離
【技術分野】
【0001】
本発明は電子道路地図上に現在位置を表示するとともに目的地を設定して経路案内を行うことができるナビゲーション装置に関する。
【背景技術】
【0002】
従来の交差点案内をするナビゲーション装置としては、スクランブル交差点コストを反映したルート探索しているものが知られている(例えば特許文献1参照)。また、ルート案内中に属性(例えば時差式、矢印式)を持つ信号機情報を事前に案内するナビゲーション装置が知られている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−174575号公報
【特許文献2】特開2007−232573号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の交差点案内をするナビゲーション装置においては、目的地を設定したルート案内中でなければスクランブル交差点を回避するルート探索をしたり、ルート案内中における信号機情報を事前に案内することはできないという問題があった。また車の走行中に必ずしも必要の無い信号機情報を事前案内してしまうという問題があった。
【0005】
そこで本発明は、従来の問題を解決するためになされたものであって、ルート案内中でなくても歩車分離信号の存在する交差点に対してより適切な見切り発車防止案内を行うことができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明のナビゲーション装置は、車両に搭載されたナビゲーション装置であって、現在位置を検出する現在位置検出手段と、歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、前記車両が停止であるか否かを判断する停止判断手段と、前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段と、を備えたことを特徴とする。
【0007】
このように構成された本発明のナビゲーション装置によれば、歩車分離信号に先頭で接近して停止した際にルート案内中でなくても歩車分離信号の切り発車防止案内が可能になる。
【0008】
また、本発明のナビゲーション装置の前記接近判断手段は、前記現在位置検出手段で検出される現在位置の緯度経度情報と、前記地図データ記憶部に記憶されている歩車分離信号交差点データの緯度経度情報から判断することを特徴とする。
【0009】
このように構成された本発明のナビゲーション装置によれば、現在位置検出手段で検出された現在位置の緯度経度情報を用いて地図データ記憶部に記憶されている歩車分離信号
交差点データの緯度経度情報と比較することで接近しているか否かを判断することができる。
【発明の効果】
【0010】
本発明によれば、歩車分離信号の存在する交差点に対して先頭で接近して停止した場合見切り発車防止案内が可能になる、また接近が先頭以外あるいは停止しない場合は案内しないため不要な案内防止が可能になる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態におけるナビゲーション装置の構成を示すブロック図
【図2】本発明の実施形態におけるナビゲーション装置の動作を示すフロー図
【図3】自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方を示す模式図
【図4】先頭判断部において自車が交差点先頭に位置するか否かの調べ方を示す模式図
【図5】本発明の実施形態における動作を説明する模式図
【発明を実施するための形態】
【0012】
以下、本発明の実施形態におけるナビゲーション装置について図面を参照しながら説明する。図1は本発明の実施形態におけるナビゲーション装置の構成を示すブロック図である。
【0013】
図1に示すように本発明実施形態におけるナビゲーション装置100は、現在位置検出部101と、地図データベース102と、メモリ103と、制御部104と、音出力部105と、表示部106で構成されている。
【0014】
ここで、現在位置検出部101は、現在位置を緯度経度を取得することができるように構成されている。
地図データベース102は、表示を行う電子地図データの道路地図が保存されると共に、道路地図における交差点の情報としては歩車分離信号有無情報が保存されて構成されている。
メモリ103は、ナビゲーション装置100が動作する際に、一時的にデータを保存することができ、制御部104が動作するにあたって利用されるものである。
【0015】
制御部104は、接近判断部104aと、停止判断部104bと、先頭判断部104cから構成され、ナビゲーション装置100の動作を制御することができるように構成されている。
ここで接近判断部104aは、現在位置検出部101で取得した現在位置の周辺に歩車分離信号情報を持つ交差点が存在するか否かを地図データベース102に保存されている道路地図を用いて判断できるように構成されている。
停止判断部104bは、現在位置検出部101で検出された現在位置の変動が一定期間更新されないときに車両が停止していると判断することができるように構成されている。また、車両から供給される車速パルスから車両が停止しているか否かを停止判断部104bで判断するようにしてもよく、また、現在位置検出部101の現在位置の変動と車速パルスを用いて車両の停止を判断するように構成しても同様の効果を得ることができる。
先頭判断部104cは、現在位置検出部101で取得した現在位置が地図データベース102の道路上に位置し、その道路の直近に歩車分離信号情報を持つ交差点が存在する場合に先頭と判断できるようになっている。
制御部104は先頭判断部が先頭と判断した場合に拡大図表示や音声案内を行うことができるように構成されている。
【0016】
音出力部105は、音案内を出力することができるように構成されており、例えば、スピーカで構成されている。
【0017】
表示部106は、ナビゲーション装置100における地図データ、現在位置、任意の位置における詳細情報を表示することができるように構成されている。なお、表示部106の表示は制御部104によって制御さえるように構成されている。
【0018】
次に、上記で説明した本発明の実施形態におけるナビゲーション装置の動作についてフローチャートを用いて説明する。図2は本発明の実施形態におけるナビゲーション装置の動作を示すフローチャートである。
【0019】
図2に示すように、本発明の実施形態におけるナビゲーション装置100は、まず現在位置検出部101で現在位置を検出する(S1)。S1で検出された現在位置に該当する道路データ及び近傍の交差点データを地図データベース102に保存された電子地図データから取得し道路データに現在位置を対応付ける。尚、現在位置検出部101はこの後メインフローとは別に定期的に上記処理を行う。また、定期的とは例えば1秒単位とする。
【0020】
次に、S1で検出された現在位置周辺に歩車分離信号交差点があるか否かを地図データベースに保存された電子地図データで検索を行う(S2)。S2において現在位置周辺に歩車分離信号交差点が無いと判断されると(S2、NO)、再度現在位置の変化がないかS1に戻って測定を行う。また、S2において現在位置周辺に歩車分離信号交差点が有ると判断されると(S2、YES)、S1で検出された現在位置とS2で検索された歩車分離信号交差点までの距離を算出する(S3)。そして再度、現在位置検出部101で現在位置を検出し(S4)、S1で検出した現在位置の緯度経度とS4検出した緯度経度の変化量から現在位置から歩車分離信号交差点が接近しているか否かを接近判断部104aで判断する(S5)。S5において接近していないと判断すると(S5、NO)、S3に戻って処理を行う。またS5において現在位置が歩車分離信号交差点に接近していると接近判断部104aで判断されると(S5、YES)、車両が停止中であるか否かを停止判断部104bで判断する(S6)。S6で車両が停止していないと判断された場合には(S6、NO)、S3に戻って処理を繰り返す。S6において停止判断部104bで車両が停止していると判断すると(S6、YES)、車両の現在位置が歩車分離信号交差点の先頭に停止しているか否かを先頭判断部104cで判断する(S7)。S7において車両の停止している位置が歩車分離交差点の先頭ではないと判断されると(S7、NO)、S3に戻り処理を行う。また、先頭判断部104cで車両が歩車分離信号交差点の先頭に停止していると判断されると(S7、YES)、音出力部105や表示部106を用いて歩車分離案内交差点に停車していることを音声や表示案内を行う(S8)。
なお、停止判断部104bにおいて、車両の停止時間が例えば1秒の場合を停止中と判断し、1秒未満の場合には車両が停止していないと判断するようにしている。
【0021】
ここで、ナビゲーション装置100の制御部104においてS1で取得した現在位置に対応する道路データの自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方について図面を用いて説明する。図3は、自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方を示す模式図である。
【0022】
図3に示すように、自車走行道路400とこの自車走行道路400と交差している交差道路401と、自車走行道路400と交差道路401が交差する点の交差点402と、自車位置を自車403とし、自車403から交差点402までの道のり距離を距離404として説明する。
自車位置前方の交差点に歩車分離信号交差点があるか否かの調べ方は、まず、制御部104で自車403から前方の歩車分離信号の存在する交差点402までの道のり距離404を算出する。接近判断部104aは、制御部104で算出された距離404が交差点ま
での道のり距離が閾値以下であるか否かを判断し、交差点に接近していると判断して次に進む。なお、閾値は例えば100mとすることで100m未満であれば現在位置から歩車分離信号交差点があると判断し、100m以上あれば歩車分離信号交差点が無いと判断することができる。
【0023】
次に図4を用いて先頭判断部104cが自車が交差点先頭に位置するかの判断について説明する。図4は、先頭判断部において自車が交差点先頭に位置するか否かの調べ方を示す模式図である。
【0024】
図4に示すように、自車走行道路500と自車走行道路500と交差している交差道路501と、自車走行道路500と交差道路501が交差する点の交差点502と、道路の幅を示す道路幅503と、自車位置を自車位置504とし、地図データベース102より読み込んだ交差道路の片側車線の幅員を幅員505と、地図データベース102より読み込んだ横断歩道の幅員506と、自車の全長を車長507と、自車から交差点までの距離を距離508として説明する。なお、先頭判断部104cは自車から交差点までの距離508≦(道路データの幅員505+横断歩道の幅員506+自車の全長507)であれば交差点の先頭に停車している判断するように構成されている。
【0025】
なお、先頭判断部において自車が交差点先頭に位置するか否かの調べ方については特に限定されるものではなく、例えば、車載カメラを用いて横断歩道を認識することによって前方に車が存在しないことを認識させても良く、また近接センサーを用いて前方に車が存在しないことを認識させても良い。
【0026】
次に、本発明の実施形態におけるナビゲーション装置の具体的な表示方法について模式図を用いて説明する。図5は、本発明におけるナビゲーション装置の表示例を示す模式図である。
【0027】
図5に示すように、ナビゲーション装置100の表示部106に表示された電子地図データには、進行道路300、交差道路301、交差点302、現在位置303を表示し、例えば、交差点302が歩車分離信号付の交差点で、現在位置303がその先頭に位置した場合、表示部交差点に歩車分離をイメージした拡大画面304及びメッセージ308を表示することで、車両を運転している人に現在停車している交差点が歩車分離信号交差点であることを通知することができる。なお、図5にいて、歩行者を歩行者305、横断歩道を横断歩道306、歩行者の通行可能方向を示す歩行者通行可能方向を歩行者通行可能方向307として表記してある。
【0028】
以上のように本発明の実施形態によれば、歩車分離信号情報を含む地図データベース102及び停止判断部104b及び先頭判断部104cを用いて歩車分離信号交差点の先頭で停止したか否かを判断し、歩車分離信号交差点に停止していると判断したときに、歩車分離信号交差点であることを気がつかずに運転者の見切り発車を防止する注意喚起を行うことができる。
【産業上の利用可能性】
【0029】
本発明は、自車前方にある交差点の種類を現在位置から判断し、交差点の種類に応じて適切な交差点に関する注意換気を行うことができるナビゲーション装置における走行支援として有用である。
【符号の説明】
【0030】
100 ナビゲーション装置
101 現在位置検出部
102 地図データベース
103 メモリ
104 制御部
104a 接近判断部
104b 停止判断部
104c 先頭判断部
105 音出力部
106 表示部
300 進行道路
301 交差道路
302 交差点
303 現在位置
304 拡大画面
305 歩行者
306 横断歩道
307 歩行者通行可能方向
400 自車走行道路
401 交差道路
402 交差点
403 自車
404 距離
500 自車走行道路
501 交差道路
502 交差点
503 道路幅
504 自車位置
505 幅員
506 幅員
507 車長
508 距離
【特許請求の範囲】
【請求項1】
車両に搭載されたナビゲーション装置であって、
現在位置を検出する現在位置検出手段と、
歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、
前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、
前記車両が停止であるか否かを判断する停止判断手段と、
前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、
前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段と、を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記接近判断手段は、前記現在位置検出手段で検出される現在位置の緯度経度情報と、前記地図データ記憶部に記憶されている歩車分離信号交差点データの緯度経度情報から判断することを特徴とする請求項1に記載のナビゲーション装置。
【請求項1】
車両に搭載されたナビゲーション装置であって、
現在位置を検出する現在位置検出手段と、
歩車分離信号交差点データを含む緯度経路に対応した地図データが記憶されている地図データ記憶部と、
前記地図データ記憶部に記憶された歩車分離信号交差点データに前記現在位置検出で検出された現在位置が接近したか否かを判断する接近判断手段と、
前記車両が停止であるか否かを判断する停止判断手段と、
前記停止判断手段で停止と判断した時に前記車両が歩車分離信号交差点に対して先頭に位置するか否かを判断する位置判断手段と、
前記位置判断手段で前記車両が前記歩車分離信号交差点における先頭にいるときに通知をする通知手段と、を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記接近判断手段は、前記現在位置検出手段で検出される現在位置の緯度経度情報と、前記地図データ記憶部に記憶されている歩車分離信号交差点データの緯度経度情報から判断することを特徴とする請求項1に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−122733(P2012−122733A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271061(P2010−271061)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]