
ナビゲーション装置
【課題】車両が逆走する可能性が高い場合に、当該車両が逆走を開始する前に警告して安全な走行支援を行う。
【解決手段】ナビゲーション装置10は、退出不可能道路検出部41により、走行中の道路に退出不可能道路が接続しているか否かを検出し、接続方向検出部42により、退出不可能道路が走行中の道路に対して接続する方向を検出し、接続点特定部43により、退出不可能道路が走行中の道路に接続する接続点を特定し、挙動判定部44により、接続点の手前において車両が接続方向に曲がるための挙動を示したと判断された場合に、警告動作実行部46により、所定の警告動作を実行する。
【解決手段】ナビゲーション装置10は、退出不可能道路検出部41により、走行中の道路に退出不可能道路が接続しているか否かを検出し、接続方向検出部42により、退出不可能道路が走行中の道路に対して接続する方向を検出し、接続点特定部43により、退出不可能道路が走行中の道路に接続する接続点を特定し、挙動判定部44により、接続点の手前において車両が接続方向に曲がるための挙動を示したと判断された場合に、警告動作実行部46により、所定の警告動作を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の逆走を防止するための機能を備えたナビゲーション装置に関する。
【背景技術】
【0002】
近年、例えば高速道路や一方通行道路における車両の逆走が社会問題となっており、このような車両の逆走を検出して警告するための様々な技術が考えられている(例えば、特許文献1〜5参照)。
しかし、これらの技術は、何れも、車両が既に逆走している状態を検出するものである。従って、車両の逆走を検出した時点では、当該車両のドライバーや同乗者、さらには周囲の他車両にとって非常に危険な状況となっており、このような危険な状況になった後に警告したとしても、安全な走行支援を行うことはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−181328号公報
【特許文献2】特開2009−122744号公報
【特許文献3】特開2009−129281号公報
【特許文献4】特開2009−168547号公報
【特許文献5】特開2009−252065号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
そこで、本発明の目的は、車両が逆走する可能性が高い場合に、当該車両が逆走を開始する前に警告することができ、安全な走行支援を行うことができるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1のナビゲーション装置によれば、退出不可能道路検出手段は、車両が走行中の道路に、当該車両が退出することができない退出不可能道路が接続しているか否かを検出する。接続方向検出手段は、退出不可能道路検出手段によって検出された退出不可能道路が、車両が走行中の道路に対して接続する方向を検出する。接続点特定手段は、退出不可能道路検出手段によって検出された退出不可能道路が、車両が走行中の道路に接続する点を接続点として特定する。挙動判定手段は、接続点特定手段によって特定された接続点の手前において、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。警告動作実行手段は、挙動判定手段によって車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定し、所定の警告動作を実行する。
即ち、請求項1のナビゲーション装置によれば、車両が退出不可能道路を逆走する可能性が高い場合には、当該車両が逆走を開始する前に警告することができ、安全な走行支援を行うことができる。なお、挙動判定手段によって車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定する逆走推定手段をさらに備えてもよい。
【0006】
また、請求項2のナビゲーション装置によれば、挙動判定手段は、車両のブレーキが所定の態様で操作された場合、または、車両の速度が所定値以下となった場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0007】
また、請求項3のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路、即ち、過去に車両が逆走した道路に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0008】
また、請求項4のナビゲーション装置によれば、警告動作実行手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路(過去に車両が逆走した道路)に合致し、且つ、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動、即ち、過去に車両が道路を逆走する手前において示した挙動に合致する場合に、直ちに所定の警告動作を実行する。
【0009】
また、請求項5のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路(過去に車両が逆走した道路)に合致し、且つ、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動、即ち、過去に車両が道路を逆走する手前において示した挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0010】
また、請求項6のナビゲーション装置によれば、警告動作実行手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動(過去に車両が道路を逆走する手前において示した挙動)の何れかに合致する場合に、直ちに所定の警告動作を実行する。
【0011】
この場合、請求項7のナビゲーション装置のように、警告動作実行手段は、退出不可能道路検出手段によって検出された退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を逆走挙動記憶手段から比較対象挙動として抽出し、車両が接続点特定手段によって特定された接続点の手前において示す挙動が比較対象挙動に合致する場合に、直ちに所定の警告動作を実行するように構成するとよい。
【0012】
また、請求項8のナビゲーション装置によれば、挙動判定手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動(過去に車両が道路を逆走する手前において示した挙動)の何れかに合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0013】
また、請求項9のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を逆走挙動記憶手段から比較対象挙動として抽出し、車両が接続点特定手段によって特定された接続点の手前において示す挙動が比較対象挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0014】
また、請求項10のナビゲーション装置によれば、警告動作実行手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が他車両挙動記憶手段に記憶されている挙動、即ち、接続点特定手段によって特定された接続点の手前において過去に他車両が示した挙動に合致する場合に、直ちに所定の警告動作を実行する。
【0015】
また、請求項11のナビゲーション装置によれば、挙動判定手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が他車両挙動記憶手段に記憶されている挙動、即ち、接続点特定手段によって特定された接続点の手前において過去に他車両が示した挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0016】
これら請求項2〜11のナビゲーション装置は、挙動判定手段による判定処理を実行するための条件、或いは、警告動作実行手段による所定の警告動作を実行するための条件を具体的に特定したものである。このように、本発明は、挙動判定手段による判定処理を実行するための条件および警告動作実行手段による所定の警告動作を実行するための条件として様々な条件を設定することができる。
【0017】
また、請求項12のナビゲーション装置によれば、挙動判定手段は、車両のウィンカーが接続方向検出手段によって検出された方向に操作された場合、または、車両のステアリングが接続方向検出手段によって検出された方向に操作された場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断する。
この請求項12のナビゲーション装置は、挙動判定手段による判定処理の内容を具体的に特定したものであり、このような手段により判定処理を精度良く実行することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態に係るものであり、ナビゲーション装置の構成を概略的に示すブロック図
【図2】車両情報取得処理の内容を示すフローチャート
【図3】逆走推定処理の内容を示すフローチャート
【図4】パニックブレーキ判定処理の内容を示すフローチャート
【図5】現在走行中の道路、退出不可能道路、接続点、退出可能道路の一例を示す図
【図6】本発明の第2実施形態に係る図1相当図
【図7】図3相当図
【図8】本発明の第3実施形態に係る図1相当図
【図9】図3相当図
【図10】変形例に係る図9相当図
【図11】本発明の第4実施形態に係る図3相当図
【図12】変形例に係る図11相当図
【図13】本発明の第5実施形態に係る図1相当図
【図14】図3相当図
【図15】変形例に係る図14相当図
【図16】(a)〜(c)は道路の構成例を示す図
【図17】変形例に係る図16(c)相当図
【発明を実施するための形態】
【0019】
(第1実施形態)
以下、本発明の第1実施形態について図1から図5を参照しながら説明する。
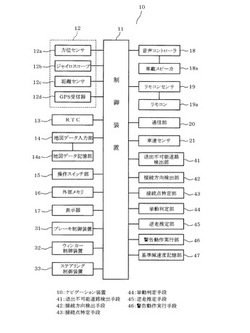
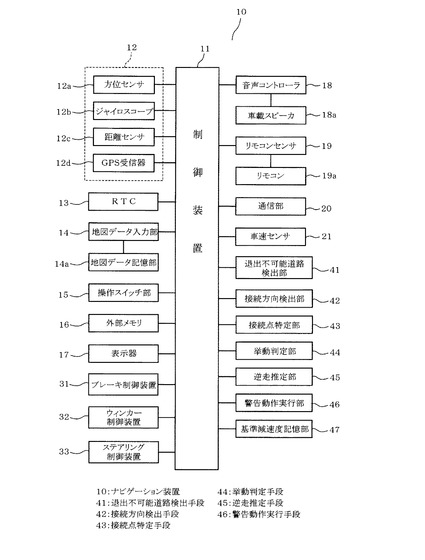
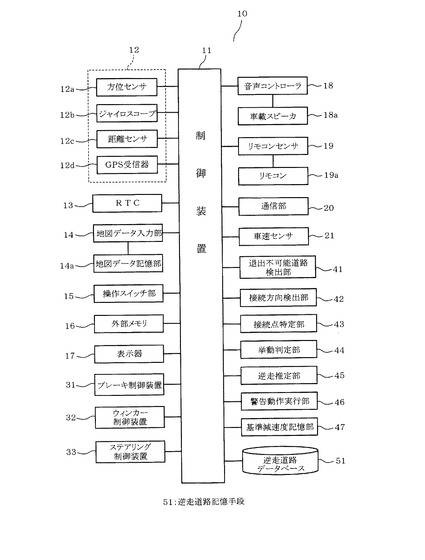
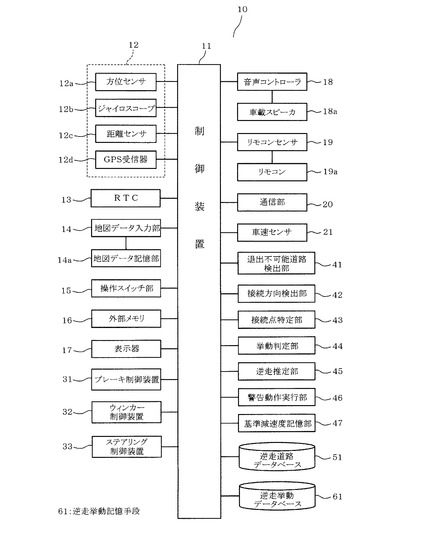
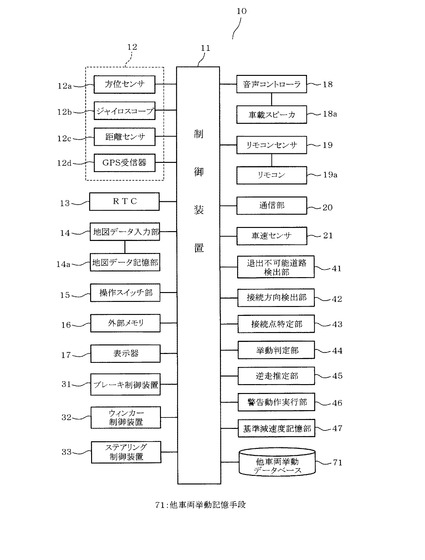
図1に示すように、ナビゲーション装置10は、例えば自動車などの車両に搭載され、制御装置11、位置検出部12、RTC13(Real Time Clock)、地図データ入力部14、操作スイッチ部15、外部メモリ16、表示器17、音声コントローラ18、リモコンセンサ19、通信部20、車速センサ21などを備えている。また、制御装置11には、ブレーキ制御装置31、ウィンカー制御装置32、ステアリング制御装置33などの各種の装置類が車載LAN(図示せず)を介して接続されている。制御装置11は、図示しないCPU、ROMおよびRAMを有するマイクロコンピュータを主体として構成されている。ナビゲーション装置10は、制御装置11のCPUにおいて制御プログラムを実行することにより、退出不可能道路検出部41(退出不可能道路検出手段に相当)、接続方向検出部42(接続方向検出手段に相当)、接続点特定部43(接続点特定手段に相当)、挙動判定部44(挙動判定手段に相当)、逆走推定部45(逆走推定手段に相当)、警告動作実行部46(警告動作実行手段に相当)、基準減速度記憶部47をソフトウェアによって仮想的に実現する。
【0020】
位置検出部12は、方位センサ12a、ジャイロセンサ12b(ジャイロスコープ)、距離センサ12cおよびGPS受信器12dなどを有しており、ナビゲーション装置10が搭載された車両(自車両)の位置を検出する。方位センサ12aは、車両の方位を検出する。ジャイロセンサ12bは、車両の回転角度を検出する。距離センサ12cは、車両の走行距離を検出する。GPS受信器12dは、GPS(Global Positioning System)により車両の現在位置を測位するために、図示しないGPS衛星から送信される電波を受信する。
RTC13は、例えば日付や時刻など時間に関する情報を取得するための計時手段である。RTC13は、図示しない発信器が出力したクロックパルスのパルス数をカウントし、カウントしたカウント値が基準値に到達すると単位時間を示す単位時間信号を生成する。そして、RTC13は、生成した単位時間信号に基づいて端末時刻を生成する。
【0021】
地図データ入力部14は、地図データ記憶部14aから地図データを取得する。地図データ記憶部14aに記憶されている地図データは、複数のノードおよびノード同士をつなぐリンクにより形成された道路データ、背景データ、目印データ、マップマッチング用データ、目的地データ、交通情報を道路データに変換するためのテーブルデータなどの各種のデータを含んでいる。また、この地図データに含まれる道路データは、道路の種類(例えば、国道、高速道路、一般道路、細街路など)ごとに区別して記憶されている。この地図データには、地名、施設名、道路名や、これら各地点、各施設、各道路の位置などの情報が含まれている。また、この地図データは、走行可能方向データを含む。この走行可能方向データは、例えば道路の種類、道路の構造、道路に設定された交通規制などによって車両が走行できる方向が制限されている道路(例えば、高速道路におけるインターチェンジ、サービスエリア、パーキングエリア、ランプウェイなどの導入路や導出路、一般道路における一方通行道路、工事などにより一方通行に規制されている道路など)について、その走行可能方向(車両が走行できる方向)を示すデータである。また、この地図データは、各道路の接続点(例えば、交差点、分岐点、合流点など、異なる道路が相互に接続する地点)を示す接続点データを含む。
地図データ記憶部14aに記憶されている地図データは、図示しないドライブ装置によって地図データ入力部14に読み取られる。地図データ記憶部14aとしては、例えばDVDやCDなどの大容量記憶媒体、メモリカードあるいはハードディスクドライブなどの記憶媒体が用いられる。
【0022】
操作スイッチ部15は、表示器17の画面の近傍に設けられているメカニカルスイッチや、表示器17の画面に設けられているタッチパネルスイッチなどから構成されている。ユーザは、操作スイッチ部15の各スイッチを用いて、車両の目的地、表示器17の画面や表示態様の切り替え(例えば、地図縮尺の変更、メニュー画面の選択、経路の探索、経路案内の開始、現在位置の修正、音量の調整など)を行う各種のコマンドの入力を行う。これにより、ナビゲーション装置10は、ユーザの指示に従って作動する。リモコンセンサ19は、リモコン19aとの間でコマンドなどの送受信を行う。リモコン19aには、複数の操作スイッチが設けられている。リモコン19aの操作スイッチを操作することにより、リモコン19aからリモコンセンサ19を経由して各種の指令信号が制御装置11へ送信される。操作スイッチ部15およびリモコン19aは、何れの操作によっても制御装置11に同一の機能を実行させることができる。
【0023】
外部メモリ16は、例えば着脱可能なフラッシュメモリカードやハードディスクドライブによって構成されている。なお、外部メモリ16は、例えばナビゲーション装置10の制御装置11に設けられているRAMやEEPROM、あるいは地図データ記憶部14aなどと共用してもよい。表示器17は、例えば液晶や有機ELなどのカラーディスプレイを有している。表示器17の画面には、車両の現在位置周辺の地図が各種縮尺で表示されるとともに、この地図表示に重ねて車両の現在位置および進行方向を示す現在地マークN(例えば図5参照)が表示される。また、目的地までの経路案内を実行する場合には、表示器17の画面には経路案内用の画面が表示される。
音声コントローラ18は、車載スピーカ18aに接続している。音声コントローラ18は、制御装置11から入力した音声出力信号を車載スピーカ18aへ出力する。音声出力信号に基づいて車載スピーカ18aから出力される音声は、案内に関する音声、操作説明に関する音声、盗難防止機能の動作中であることを報知する音声、音声認識結果に応じたトークバック音声、後述する逆走推定処理における逆走警告音声などである。
【0024】
制御装置11は、車両が走行経路に沿って移動可能とするために、表示器17の画面に現在地周辺の道路地図を表示するとともに、車両の現在位置および進行方向を示す現在地マークNを道路に重ねて表示する。この場合、車両の走行に伴って現在地マークNの表示は、表示器17に表示された地図上を移動する。表示器17に表示された地図は、車両の現在位置に応じてスクロールされる。このとき、制御装置11は、車両の現在位置を道路上にあわせるマップマッチングを実施する。
通信部20は、例えば無線の通信回線を経由して、図示しない情報センターとの間でデータ通信を行う。即ち、通信部20は、各種のデータの送信機能および受信機能を有する。なお、情報センターは、例えば、渋滞情報、交通規制情報、事故情報、路面情報、イベント情報、店舗情報、気象情報、最新の地図データなどの各種の情報を保有している。
【0025】
ブレーキ制御装置31は、車両のブレーキが操作されているか否か(踏まれているか否か)を示す信号、さらには、ブレーキがどの程度操作されているか(どの程度踏まれているか)を示す信号を含む情報をブレーキ情報として出力する。
ウィンカー制御装置32は、車両のウィンカーが操作されているか否かを示す信号、さらには、ウィンカーが操作された方向(右側に操作されたか、或いは、左側に操作されたか)を示す信号を含む情報をウィンカー情報として出力する。
ステアリング制御装置33は、車両のステアリングが操作されているか否かを示す信号、さらには、ステアリングが操作された方向(右側に操作されたか、或いは、左側に操作されたか)を示す信号、および、ステアリングがどの程度操作されたか(ステアリングの回転量)を示す信号を含む情報をステアリング情報として出力する。
車速センサ21は、車両の速度を検出する。制御装置11は、車速センサ21が検出した車速を車速情報として取得する。
【0026】
退出不可能道路検出部41は、車両が現在走行中の道路に、現在走行中の道路とは異なる道路であって、且つ、車両が退出することができない道路である退出不可能道路が接続しているか否かを検出する。なお、退出不可能道路とは、例えば道路の種類、道路の構造、道路に設定された交通規制などによって車両が走行できる方向(走行可能方向)が一方向に制限されている道路であって、車両が現在走行中の道路を道なりに走行して当該道路に進入すると、その道路を車両が走行可能方向とは逆方向に走行(逆走)してしまうことになる道路である。
接続方向検出部42は、退出不可能道路検出部41によって検出された退出不可能道路が現在走行中の道路に対して接続する方向、即ち、退出不可能道路が現在走行中の道路に対して右側に接続されているのか、或いは、左側に接続されているのかを検出する。
接続点特定部43は、退出不可能道路検出部41によって検出された退出不可能道路が現在走行中の道路に接続する点(道路の交差点、分岐点、合流点など)を接続点として特定する。
挙動判定部44は、挙動判定処理を実行する。この挙動判定処理は、接続点特定部43によって特定された接続点の手前において、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したか否かを判定する処理である。
【0027】
逆走推定部45は、挙動判定部44による挙動判定処理によって、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定する。
警告動作実行部46は、逆走推定部45によって、車両が退出不可能道路を逆走すると推定された場合に、詳しくは後述する所定の警告動作を実行する。なお、この警告動作実行部46は、挙動判定部44による挙動判定処理によって、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したと判断された場合には、逆走推定部45の判断結果に関わらず、つまり、逆走推定部45によって、車両が退出不可能道路を逆走すると推定されたか否かに関わらず、後述する所定の警告動作を実行するように構成してもよい。
基準減速度記憶部47は、詳しくは後述する基準減速度を、ナビゲーション装置10が備えるメモリなどの記憶媒体に記憶する。また、この基準減速度記憶部47は、記憶した基準減速度を更新可能に構成されている。
ナビゲーション装置10の制御装置11は、これら退出不可能道路検出部41、接続方向検出部42、接続点特定部43、挙動判定部44、逆走推定部45、警告動作実行部46、基準減速度記憶部47などにより、後述する動作を実行可能に構成されている。
【0028】
次に、上述の構成のナビゲーション装置10の制御装置11が実行する動作内容、具体的には、車両情報取得処理および逆走推定処理の内容について順に説明する。
(車両情報取得処理)
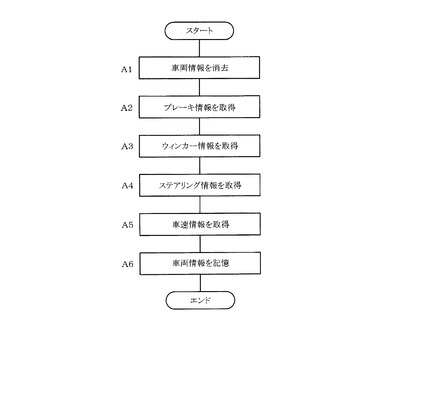
図2は、ナビゲーション装置10の電源がオンされている間、制御装置11が定期的・周期的(例えば100msごと)に実行する車両情報取得処理の内容を示すフローチャートである。
ナビゲーション装置10の制御装置11は、まず、前回の車両情報取得処理において取得して記憶した各車両情報を消去する(ステップA1)。そして、制御装置11は、ブレーキ制御装置31からブレーキ情報を取得し(ステップA2)、ウィンカー制御装置32からウィンカー情報を取得し(ステップA3)、ステアリング制御装置33からステアリング情報を取得し(ステップA4)、車速センサ21からの入力信号に基づく車速情報を取得する(ステップA5)。そして、制御装置11は、取得した各車両情報(ブレーキ情報、ウィンカー情報、ステアリング情報、車速情報)を記憶する(ステップA6)。制御装置11は、これらステップA1〜A6の処理を繰り返し実行する。なお、この車両情報取得処理によって取得する車両情報は、上述のブレーキ情報、ウィンカー情報、ステアリング情報、車速情報に限られるものではなく、例えば、RTC13からの時刻情報、車載カメラからの画像情報、ドライバーの脈拍や心拍数を検出する生体センサからの生体情報など、種々の情報を必要に応じて取得することができる。
【0029】
(逆走推定処理)
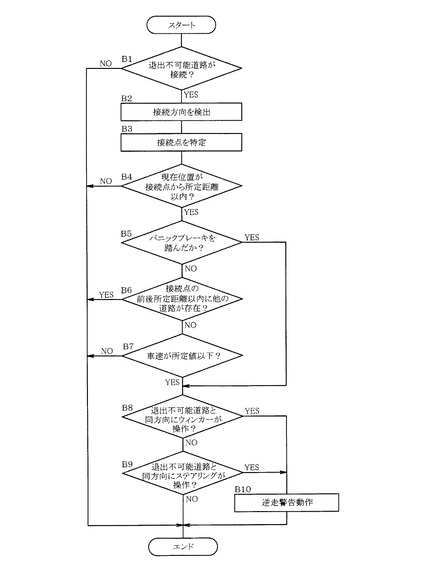
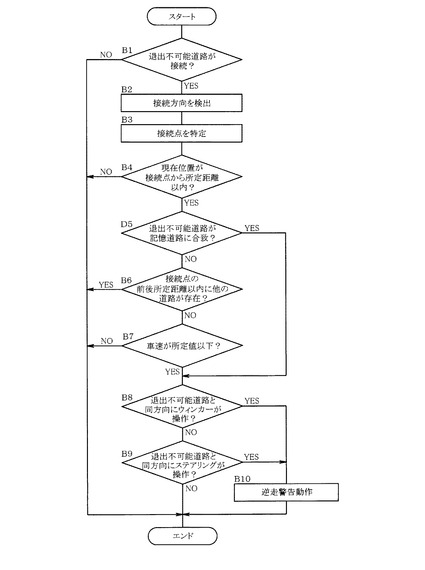
図3は、ナビゲーション装置10の電源がオンされている間、制御装置11が定期的・周期的(例えば1sごと)に実行する逆走推定処理の内容を示すフローチャートである。なお、この逆走推定処理は、上述の車両情報取得処理と並列的に実行されるものである。
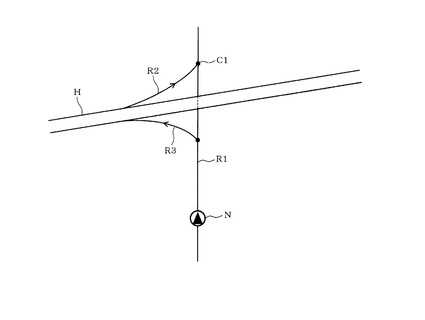
ナビゲーション装置10の制御装置11は、現在走行中の道路(例えば、図5に示す一般道路R1参照)に、車両(自車両)が退出することができない退出不可能道路(例えば、図5に示す高速道路Hの導出路R2参照)が接続しているか否かを判断する(ステップB1)。制御装置11は、現在走行中の道路に退出不可能道路が接続していると判断した場合(ステップB1:YES)には、検出された退出不可能道路が現在走行中の道路に対して接続する方向、即ち、退出不可能道路が現在走行中の道路に対して車両の進行方向に見て右側に接続されているのか、或いは、左側に接続されているのかを検出する(ステップB2)。例えば、図5に示す例では、制御装置11は、退出不可能道路R2が現在走行中の道路R1に対して車両の進行方向(図5では上方向)に見て「左側」に接続されていると判断する。
【0030】
また、制御装置11は、検出された退出不可能道路が現在走行中の道路に接続する点を接続点(例えば、図5に示す合流点C1参照)として特定する(ステップB3)。そして、制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離(例えば50m)以内であるか否かを判断する(ステップB4)。なお、このステップB4における所定距離は、適宜変更して設定することができるが、ドライバーが道路の交差点、分岐点、合流点の手前において車両の進行方向を曲げるための動作(例えば、ウィンカーの操作やステアリングの操作)を開始する距離として通常想定される距離を設定することが好ましい。また、一旦設定した所定距離を、例えば車両の速度に応じて動的に変更するように構成してもよい。
【0031】
制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離以内でない場合(ステップB4:NO)には、この逆走推定処理を終了する。一方、制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離以内である場合(ステップB4:YES)には、ドライバーがパニックブレーキを踏んだか否かを判断する(ステップB5)。
【0032】
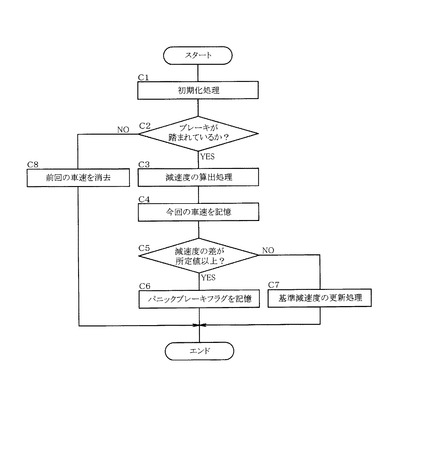
ここで、パニックブレーキを踏んだか否かの判定処理(パニックブレーキ判定処理)について図4に示すフローチャートを参照しながら説明する。
このパニックブレーキ判定処理では、制御装置11は、まず、初期化処理を実行する(ステップC1)。この初期化処理では、制御装置11は、パニックブレーキフラグ(後述するステップC6参照)が記憶されている場合には、そのパニックブレーキフラグを消去する。制御装置11は、初期化処理を完了すると、ブレーキ制御装置31から取得したブレーキ情報に基づいて、ブレーキが踏まれているか否かを判断する(ステップC2)。制御装置11は、ブレーキが踏まれていない場合(ステップC2:NO)には、前回のパニックブレーキ判定処理の実行時において記憶した車両の速度(前回の車速、後述するステップC4参照)を消去し(ステップC8)、このパニックブレーキ判定処理を終了する。一方、制御装置11は、ブレーキが踏まれている場合(ステップC2:YES)には、減速度の算出処理を実行する(ステップC3)。この減速度の算出処理では、制御装置11は、前回のパニックブレーキ判定処理の実行時において記憶した車両の速度(前回の車速、後述するステップC4参照)と現在の車両の速度(今回の車速)との差(車速差)を減速度として算出する。なお、前回のパニックブレーキ判定処理において、ステップC8により前回の車速を消去している場合には、制御装置11は、今回の車速を前回の車速とみなして減速度を算出する。即ち、この場合、算出される減速度は、今回の車速と今回の車速との差(実質的には「0」)である。
【0033】
次に、制御装置11は、今回の車速を記憶する(ステップC4)。そして、制御装置11は、上述の減速度の算出処理によって算出された減速度と基準減速度記憶部47によって記憶されている基準減速度との差が所定値(例えば、10km/h)以上であるか否かを判断する(ステップC5)。なお、このステップC5における所定値は、適宜変更して設定することができる。制御装置11は、算出された減速度と基準減速度との差が所定値以上である場合(ステップC5:YES)には、パニックブレーキを踏んだことを示すパニックブレーキフラグを記憶して(ステップC6)、このパニックブレーキ判定処理を終了する。一方、制御装置11は、算出された減速度と基準減速度との差が所定値以上でない場合(ステップC5:NO)には、基準減速度の更新処理を実行する(ステップC7)。
【0034】
この基準減速度の更新処理では、制御装置11は、ステップC3において算出された減速度に基づいて、基準減速度記憶部47によって記憶されている基準減速度(現基準減速度)を更新する。この場合、制御装置11は、算出された減速度と現基準減速度との平均値を算出し、算出された平均値を新たな基準減速度(新基準減速度)として更新する。従って、次回のパニックブレーキ判定処理では、ステップC5の判断処理において新基準減速度が使用される。なお、基準減速度の更新は、算出された減速度と現基準減速度との平均値を算出する方法に限られるものではなく、算出された減速度に基づく方法であれば、例えば、算出された減速度および現基準減速度にそれぞれ異なる重み付けを付加した値の平均値を新基準減速度として更新したり、算出された減速度をそのまま新たな基準減速度として更新するなど、種々の方法を採用することができる。ブレーキの踏み方(ブレーキの操作態様)は、ドライバーによって様々である。この基準減速度の更新処理は、上述のステップC5の判断処理の基準となる要素(基準減速度)に、ドライバーのブレーキの踏み方の特徴を反映させるための処理である。制御装置11は、基準減速度の更新処理を完了すると、このパニックブレーキ判定処理を終了する。
【0035】
制御装置11は、図3のステップB5の判断処理において、ドライバーがパニックブレーキを踏んだと判断した場合、即ち、パニックブレーキフラグが記憶されている場合(ステップB5:YES)には、ステップB8に移行する。一方、制御装置11は、ステップB5の判断処理において、ドライバーがパニックブレーキを踏んでいないと判断した場合、即ち、パニックブレーキフラグが記憶されていない場合(ステップB5:NO)には、上述のステップB3の処理によって特定された接続点の前後(車両の進行方向に沿う前後方向)において当該接続点から所定距離(例えば50m)以内に、他の道路(例えば、図5に示す高速道路Hの導入路R3参照)が存在するか否かを判断する(ステップB6)。なお、「他の道路」とは、現在走行中の道路に対して上述のステップB2において検出された方向(上述のステップB1の処理によって検出された退出不可能道路が現在走行中の道路に接続する方向)と同方向に接続する道路であって、且つ、検出された退出不可能道路とは異なる道路である。また、この「他の道路」として検出する道路は、退出可能道路(走行可能方向が一方向に制限されている道路であって、車両が現在走行中の道路を道なりに走行して当該道路に進入すると、その道路を車両が走行可能方向に走行することになる道路、例えば、図5に示す高速道路Hの導入路R3参照)のみに限定してもよいし、退出可能道路であるか退出不可能道路であるかに関わらず、接続点の前後所定距離以内に存在する道路を検出するようにしてもよい。また、このステップB6における所定距離は、適宜変更して設定することができるが、上述のステップB4における所定距離に近い値を設定することが好ましい。
【0036】
制御装置11は、他の道路が存在すると判断した場合(ステップB6:YES)には、この逆走推定処理を終了する。検出された退出不可能道路の近傍に他の道路が存在する場合、ドライバー(車両)は、退出不可能道路ではなく、その近傍の道路に進入する可能性もある。このような場合に、後述する逆走警告動作(ステップB10参照)を実行してしまうと、ドライバーが困惑するなどして、安全な走行支援に支障をきたす場合がある。従って、制御装置11は、検出された退出不可能道路の近傍に当該退出不可能道路と同方向に接続する他の道路が存在する場合(ステップB6:YES)には、誤警告を回避すべく、この逆走推定処理を終了する。
【0037】
一方、制御装置11は、上述のステップB6において、他の道路が存在しないと判断した場合(ステップB6:NO)には、車両の速度が所定値(例えば、10〜20km/h)以下であるか否かを判断する(ステップB7)。なお、このステップB7における所定値は、適宜変更して設定することができるが、車両がその進行方向を曲げることができる程度の速度に設定することが好ましい。
【0038】
制御装置11は、車両の速度が所定値以下でない場合(ステップB7:NO)には、この逆走推定処理を終了する。通常、ドライバーは、現在進行中の道路とは異なる道路に進入する場合(例えば、高速道路におけるインターチェンジなどの導入路に進入する場合や、一般道路において右折や左折をする場合など)には、車両を減速させるはずである。従って、車両の速度が所定値以下でない場合(ステップB7:NO)、即ち、車両が減速していない場合には、当該車両は、現在走行中の道路とは異なる道路に進入することなく、現在走行中の道路をそのまま走行し続けることが想定される。このような場合に、後述する逆走警告動作(ステップB10参照)を実行してしまうと、ドライバーが困惑するなどして、安全な走行支援に支障をきたす場合がある。従って、制御装置11は、車両が減速していない場合(ステップB7:NO)には、誤警告を回避すべく、この逆走推定処理を終了する。
一方、制御装置11は、上述のステップB7において、車両の速度が所定値以下であると判断した場合(ステップB7:YES)には、ステップB8に移行する。
【0039】
制御装置11は、ステップB8に移行すると、ウィンカー制御装置32から取得したウィンカー情報に基づいて、上述のステップB2において検出された方向(退出不可能道路が現在走行中の道路に接続する方向)に車両のウィンカーが操作されているか否かを判断する。制御装置11は、退出不可能道路が接続する方向と同方向にウィンカーが操作されている場合(ステップB8:YES)には、ステップB10に移行する。一方、制御装置11は、退出不可能道路が接続する方向と同方向にウィンカーが操作されていない場合(ステップB8:NO)には、ステアリング制御装置33から取得したステアリング情報に基づいて、上述のステップB2において検出された方向(退出不可能道路が現在走行中の道路に接続する方向)に車両のステアリングが操作されているか否かを判断する(ステップB9)。制御装置11は、退出不可能道路が接続する方向と同方向にステアリングが操作されている場合(ステップB9:YES)には、ステップB10に移行する。一方、制御装置11は、退出不可能道路が接続する方向と同方向にステアリングが操作されていない場合(ステップB9:NO)には、この逆走推定処理を終了する。即ち、制御装置11は、車両が、退出不可能道路が現在走行中の道路に接続する方向と同方向に曲がるための挙動を示したと判断した場合(ステップB8にてYESの場合、或いは、ステップB9にてYESの場合)に、車両が退出不可能道路を逆走すると推定し、ステップB10に移行する。なお、ステップB8の判断処理とステップB9の判断処理は、順序を入れ換えて実行してもよい。
【0040】
制御装置11は、ステップB10に移行すると、所定の逆走警告動作を実行する。この場合、制御装置11は、車載スピーカ18aを介して逆走警告音声(例えば「本車両は逆走するおそれがあります。注意してください。」といった逆走する可能性が高い旨を報知する音声)を出力する。なお、制御装置11は、逆走警告動作として、表示器17を介して逆走警告表示(例えば、ステップB1の処理によって検出された退出不可能道路を点滅などにより強調表示、或いは、逆走する可能性が高い旨を報知するテキストの表示など)を出力するように構成してもよい。また、制御装置11は、逆走警告動作として、逆走警告音声および逆走警告表示の双方を出力するように構成してもよい。
【0041】
以上に説明したように本実施形態によれば、ナビゲーション装置10の制御装置11は、車両が退出することができない退出不可能道路が現在走行中の道路に接続する接続点の手前において、車両が、退出不可能道路が現在走行中の道路に対して接続する方向に曲がるための挙動を示した場合(車両のウィンカーが、退出不可能道路側(退出不可能道路が接続する方向)に操作された場合、或いは、車両のステアリングが、退出不可能道路側(退出不可能道路が接続する方向)に操作された場合)、つまり、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、逆走警告音声、或いは、逆走警告表示による所定の逆走警告動作を実行する。これにより、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
【0042】
なお、本実施形態は、ステップB8の処理、或いは、ステップB9の処理からなる挙動判定処理(車両が、検出された退出不可能道路が現在走行中の道路に接続する方向に曲がるための挙動を示したか否かを判定するための処理)を実行するための条件として、パニックブレーキが踏まれた場合(「車両のブレーキが所定の態様で操作された場合」に相当、ステップB5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。
【0043】
(第2実施形態)
次に、本発明の第2実施形態について図6および図7を参照しながら説明する。
図6に示すように、本実施形態では、ナビゲーション装置10は、逆走道路データベース51(逆走道路記憶手段に相当)を備える。ナビゲーション装置10の制御装置11は、車両が退出不可能道路を逆走してしまった場合には、その退出不可能道路を特定するための情報(道路の名称、位置、種類、構造など)を逆走道路データベース51に記憶するようになっている。
【0044】
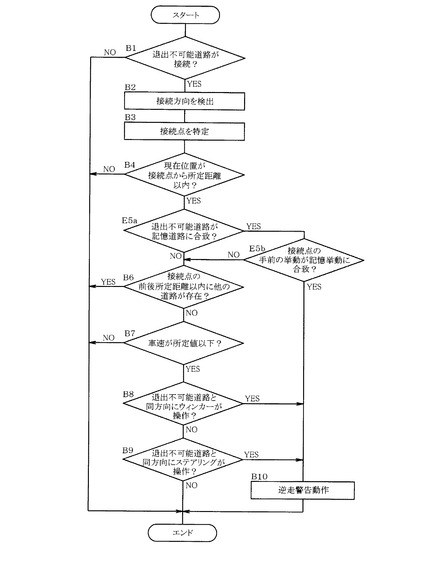
次に、本実施形態における逆走推定処理の動作内容について図7に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップD5の判断処理を実行するようになっている。このステップD5では、制御装置11は、ステップB1の処理によって検出された退出不可能道路が逆走道路データベース51に記憶されている道路、即ち、過去に車両が逆走してしまった退出不可能道路に合致するか否かを判断する。そして、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップD5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致しない場合(ステップD5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0045】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップD5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。
【0046】
(第3実施形態)
次に、本発明の第3実施形態について図8および図9を参照しながら説明する。
図8に示すように、本実施形態では、ナビゲーション装置10は、上述の逆走道路データベース51に加え、さらに逆走挙動データベース61(逆走挙動記憶手段に相当)を備える。また、ナビゲーション装置10の制御装置11は、車両情報取得処理(図2参照)によって取得した各車両情報を、随時更新するのではなく、所定期間(少なくとも、上述の逆走推定処理が実行される周期よりも長い期間)だけ蓄積するように構成されている。そして、制御装置11は、車両が退出不可能道路を逆走してしまった場合には、その退出不可能道路を特定するための情報を逆走道路データベース51に記憶するとともに、当該車両が当該退出不可能道路を逆走する手前において示した挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)を、蓄積した車両情報に基づいて解析し、逆走挙動データベース61に記憶するように構成されている。
【0047】
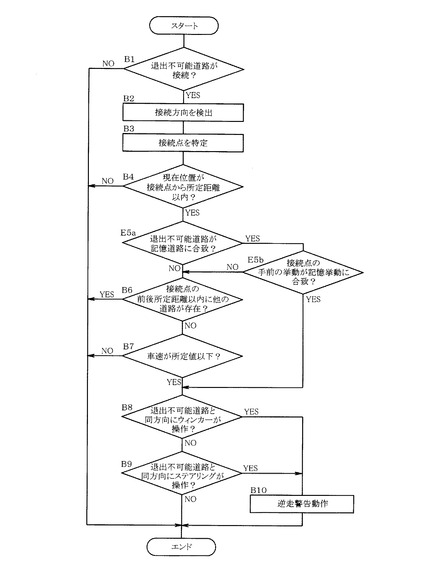
次に、本実施形態における逆走推定処理の動作内容について図9に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップE5aの判断処理およびステップE5bの判断処理を実行するようになっている。ステップE5aでは、制御装置11は、ステップB1の処理によって検出された退出不可能道路が逆走道路データベース51に記憶されている道路、即ち、過去に車両が逆走してしまった退出不可能道路に合致するか否かを判断する。そして、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップE5a:YES)には、ステップE5bに移行する。
【0048】
このステップE5bでは、制御装置11は、車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、逆走挙動データベース61に記憶されている挙動に合致するか否かを判断する。そして、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5b:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。
【0049】
一方、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致しない場合(ステップE5a:NO)、或いは、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致しない場合(ステップE5b:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0050】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致し、且つ、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5aにて「YES」、且つ、ステップE5bにて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップE5bによる判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0051】
また、本実施形態に代わり、図10に示すように、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致し、且つ、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5aにて「YES」、且つ、ステップE5bにて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップE5bによる判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0052】
(第4実施形態)
次に、本実施形態の第4実施形態について図11を参照しながら説明する。
上述の第3実施形態に示した逆走挙動データベース61には、過去に実行された逆走推定処理において検出された退出不可能道路、つまり、今回の逆走推定処理において検出される退出不可能道路とは必ずしも一致しない退出不可能道路について、その道路を車両が逆走したときの挙動を示すデータが蓄積される。本実施形態は、このように逆走挙動データベース61に蓄積されるデータ(過去に別の道路において発生した逆走に関するデータ)を利用して逆走推定処理を実行するものである。
【0053】
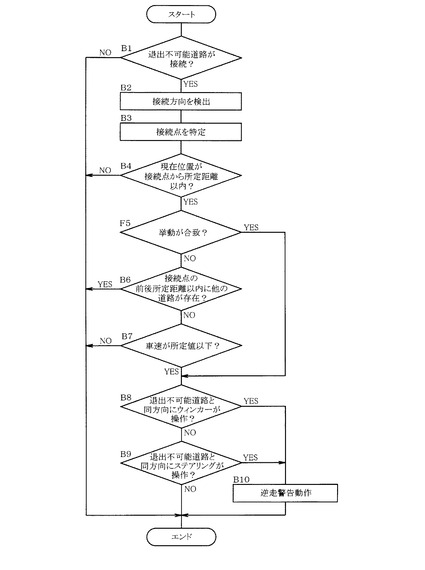
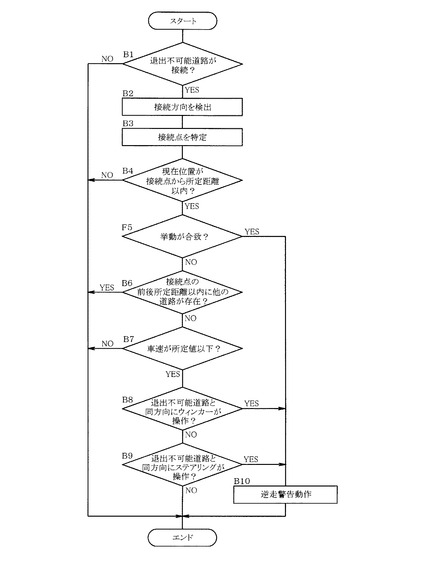
即ち、本実施形態では、図11に示すように、ナビゲーション装置10の制御装置11は、上述のステップE5a,E5bの判断処理に代わり、ステップF5の判断処理を実行するようになっている。このステップF5では、制御装置11は、車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、逆走挙動データベース61に記憶されている挙動の何れかに合致するか否かを判断する。そして、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れにも合致しない場合(ステップF5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0054】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップF5による判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0055】
また、本実施形態に代わり、図12に示すように、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5にて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップF5による判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0056】
(第5実施形態)
次に、本発明の第5実施形態について図13および図14を参照しながら説明する。
図13に示すように、本実施形態では、ナビゲーション装置10は、他車両挙動データベース71(他車両挙動記憶手段に相当)を備える。図示はしないが、他車両に搭載されたナビゲーション装置の制御装置は、当該他車両が備える接続点特定部によって特定された接続点の手前において当該他車両が示した挙動(例えば、他車両におけるブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)に係る情報(他車両挙動情報)を、通信部を介して情報センターに送信するように構成されている。そして、自車両に搭載されたナビゲーション装置10の制御装置11は、通信部20を介して、情報センターから他車両挙動情報を受信し、受信した他車両挙動情報を他車両挙動データベース71に記憶するように構成されている。
【0057】
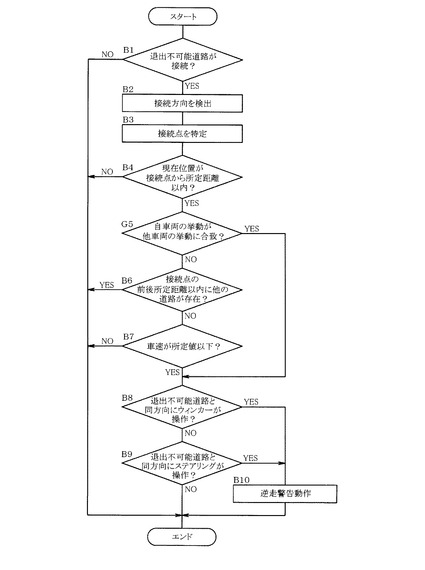
次に、本実施形態における逆走推定処理の動作内容について図14に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップG5の判断処理を実行するようになっている。このステップG5では、制御装置11は、自車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、自車両におけるブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、他車両挙動データベース71に記憶されている他車両挙動情報が示す挙動(他車両の挙動)に合致するか否かを判断する。そして、制御装置11は、自車両が接続点の手前において示す挙動が他車両の挙動に合致する場合(ステップG5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、自車両が接続点の手前において示す挙動が他車両の挙動に合致しない場合(ステップG5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0058】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、自車両に搭載されたナビゲーション装置10の制御装置11は、情報センターを介することなく、他車両に搭載されたナビゲーション装置から他車両挙動情報を直接受信するように構成してもよい。
【0059】
また、本実施形態は、挙動判定処理を実行するための条件として、車両が接続点の手前において示す挙動が他車両挙動データベース71に記憶されている他車両の挙動に合致する場合(ステップG5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップG5による判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0060】
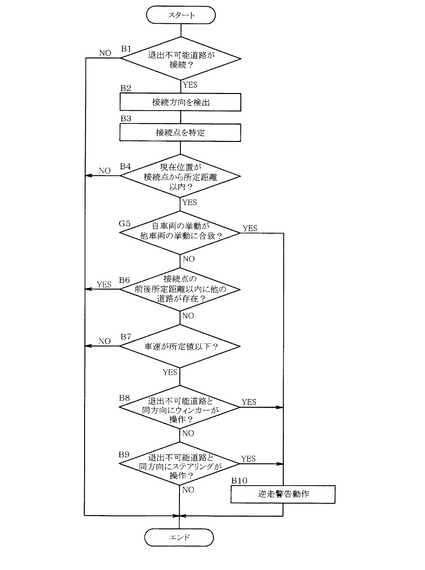
また、本実施形態に代わり、図15に示すように、制御装置11は、車両が接続点の手前において示す挙動が他車両挙動データベース71に記憶されている他車両の挙動に合致する場合(ステップG5にて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップG5による判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0061】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば以下のように変形または拡張することができる。
例えば、上記第5実施形態にて図14、或いは、図15に示すフローチャートのステップG5では、自車両がステップB3の処理によって特定された接続点の手前において示す挙動(自車両の挙動)と、他車両挙動データベース71に記憶されている全ての他車両挙動情報が示す挙動(他車両の挙動)とを比較するように構成してもよい。より好ましくは、他車両挙動データベース71に記憶されている他車両の挙動のうち自車両の運転者に似た運転特性(運転の癖や傾向)を有する他車両の挙動を抽出し、自車両の挙動と、その抽出された他車両の挙動とを比較するように構成するとよい。
【0062】
即ち、ナビゲーション装置10は、他車両挙動データベース71を構築する際に、記憶する他車両挙動情報を、運転特性(アクセル操作の態様、ブレーキ操作の態様、平均走行速度、車種などの各種データ)に基づいて複数のグループに分類可能に構成しておく。具体的には、例えば、アクセル操作やブレーキ操作が標準的なグループ、アクセル操作やブレーキ操作が荒っぽいグループ、アクセル操作やブレーキ操作が非常に丁寧なグループといった具合に分類しておく。これにより、ナビゲーション装置10の制御装置11は、ステップG5の判断処理において、自車両と同一、或いは、近似するグループに属する他車両の挙動、つまり、自車両の運転特性に似た他車両の挙動を抽出することが可能となる。
【0063】
また、ナビゲーション装置10は、自車両における普段の運転特性の履歴(アクセル操作やブレーキ操作の履歴)を情報センターにアップロードして登録し、情報センターは、アップロードされた運転特性の履歴を当該履歴情報をアップロードした自車両に対応付けて上述のようなグループに分類して記憶するように構成する。この構成によれば、自車両がどのグループに所属しているのかが情報センターにて把握できるようになる。そして、情報センターは、自車両と同一、或いは、近似するグループに属する他車両の挙動(他車両挙動情報)のみをナビゲーション装置10に送信するように構成してもよい。この構成によっても、ナビゲーション装置10の制御装置11は、ステップG5の判断処理において、自車両と同一、或いは、近似するグループに属する他車両の挙動、つまり、自車両の運転特性に似た他車両の挙動を抽出することが可能となる。
このようにすれば、自車両の挙動と他車両の挙動とを比較する場合に、自車両の運転傾向に極力近い他車両の挙動と比較することができるため、自車両の逆走の可能性を一層精度良く推定することが可能となる。
【0064】
また、例えば、上記第5実施形態の技術的思想を上記第4実施形態に適用することも当然に可能である。即ち、上記第5実施形態では、自車両がこれから差し掛かる退出不可能道路の接続点の手前において、他車両が逆走前に示した挙動と自車両の挙動とを比較するように構成した。これに代わり、自車両がこれから差し掛かる退出不可能道路の接続点の手前において、その退出不可能道路とは異なる道路において他車両が当該異なる道路を逆走する前に示した挙動と自車両の挙動とを比較するように構成してもよい。
この構成によれば、特に、自車両がこれから差し掛かる退出不可能道路の接続点付近を初めて走行する場合や、その退出不可能道路を過去に逆走した他車両の挙動情報がデータベースに存在しない場合であっても、自車両が、その退出不可能道路を逆走するかどうかを有効に推定することが可能となる。
【0065】
なお、本発明により逆走の防止を図ることができる道路の構成(形状)は、多種多様である。例えば、図16(a)に示す例は、退出不可能道路である高速道路の導出路R4が、車両が現在走行中の一般道路R5に対して車両の進行方向(図16(a)では右方向)に見て左側に接続する場合の例であり、本発明によれば、車両が、誤って導出路R4に進入して逆走してしまうこと(破線矢印Aに示す方向に走行してしまうこと)を未然に防止することができる。また、図16(b)に示す例は、退出不可能道路である高速道路の本線R6の一部(接続点C2よりも下流側の部分、図16(b)では接続点C2よりも右側の部分)が、車両が現在走行中の導入路R7に対して車両の進行方向に見て右側に接続する場合の例であり、本発明によれば、車両が、誤って高速道路の本線R6を逆走してしまうこと(破線矢印Bに示す方向に走行してしまうこと)を未然に防止することができる。また、図16(c)に示す例は、特殊な構造のインターチェンジの例である。この場合、高速道路の本線R8には、T字状の取付道R9が接続されており、この取付道R9では、車両は実線矢印C,Dに示す方向に走行することができる。このような構造の道路においても、本発明によれば、車両が、誤って取付道R9を逆走してしまうこと(破線矢印Eに示す方向に逆走してしまうこと)を未然に防止することができる。なお、図16に示した例は、本発明により逆走の防止を図ることができる道路の一例に過ぎず、本発明を適用することができる道路は、図16に示す例に限られるものではない。
【0066】
また、例えば図17に示すように、退出不可能道路(この場合、取付道R9のうち接続点C3よりも下流側の部分、図17では接続点C3よりも左側の部分)に他車両Pが存在する場合には、自車両Qのドライバーは、当該他車両Pを認識することで、取付道R9を規定の方向(実線矢印C方向)に進行する可能性が高まり、その分、逆走が発生する可能性は低くなる。つまり、車両(ドライバー)が逆走するかしないかは、当該車両が接続点(逆走ポイント)に差し掛かるときの周囲の状況にも影響される場合がある。そこで、車両の逆走が発生した場合には、例えば、車載カメラ、或いは、路上に設定された路上カメラなどのインフラ設備を利用して、その逆走が発生したときの周囲の状況(例えば、退出不可能道路に他車両が存在したか否かなど)も記録し、その記録情報を例えば情報センターに蓄積する構成としてもよい。そして、ナビゲーション装置10の制御装置11は、接続点に差し掛かるときに、そのときの状況に一致する状況、或いは、極力近似する状況のデータを取得し、その取得したデータに基づいて逆走判定処理を実行するようにしてもよい。即ち、ナビゲーション装置10の制御装置11は、取得したデータが示す状況と現在の車両の状況とが合致、或いは、近似する場合には、逆走警告動作を実行するように構成してもよい。
【符号の説明】
【0067】
図面中、10はナビゲーション装置、41は退出不可能道路検出部(退出不可能道路検出手段)、42は接続方向検出部(接続方向検出手段)、43は接続点特定部(接続点特定手段)、44は挙動判定部(挙動判定手段)、45は逆走推定部(逆走推定手段)、46は警告動作実行部(警告動作実行手段)、51は逆走道路データベース(逆走道路記憶手段)、61は逆走挙動データベース(逆走挙動記憶手段)、71は他車両挙動データベース(他車両挙動記憶手段)を示す。
【技術分野】
【0001】
本発明は、車両の逆走を防止するための機能を備えたナビゲーション装置に関する。
【背景技術】
【0002】
近年、例えば高速道路や一方通行道路における車両の逆走が社会問題となっており、このような車両の逆走を検出して警告するための様々な技術が考えられている(例えば、特許文献1〜5参照)。
しかし、これらの技術は、何れも、車両が既に逆走している状態を検出するものである。従って、車両の逆走を検出した時点では、当該車両のドライバーや同乗者、さらには周囲の他車両にとって非常に危険な状況となっており、このような危険な状況になった後に警告したとしても、安全な走行支援を行うことはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−181328号公報
【特許文献2】特開2009−122744号公報
【特許文献3】特開2009−129281号公報
【特許文献4】特開2009−168547号公報
【特許文献5】特開2009−252065号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
そこで、本発明の目的は、車両が逆走する可能性が高い場合に、当該車両が逆走を開始する前に警告することができ、安全な走行支援を行うことができるナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1のナビゲーション装置によれば、退出不可能道路検出手段は、車両が走行中の道路に、当該車両が退出することができない退出不可能道路が接続しているか否かを検出する。接続方向検出手段は、退出不可能道路検出手段によって検出された退出不可能道路が、車両が走行中の道路に対して接続する方向を検出する。接続点特定手段は、退出不可能道路検出手段によって検出された退出不可能道路が、車両が走行中の道路に接続する点を接続点として特定する。挙動判定手段は、接続点特定手段によって特定された接続点の手前において、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。警告動作実行手段は、挙動判定手段によって車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定し、所定の警告動作を実行する。
即ち、請求項1のナビゲーション装置によれば、車両が退出不可能道路を逆走する可能性が高い場合には、当該車両が逆走を開始する前に警告することができ、安全な走行支援を行うことができる。なお、挙動判定手段によって車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定する逆走推定手段をさらに備えてもよい。
【0006】
また、請求項2のナビゲーション装置によれば、挙動判定手段は、車両のブレーキが所定の態様で操作された場合、または、車両の速度が所定値以下となった場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0007】
また、請求項3のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路、即ち、過去に車両が逆走した道路に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0008】
また、請求項4のナビゲーション装置によれば、警告動作実行手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路(過去に車両が逆走した道路)に合致し、且つ、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動、即ち、過去に車両が道路を逆走する手前において示した挙動に合致する場合に、直ちに所定の警告動作を実行する。
【0009】
また、請求項5のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路が逆走道路記憶手段に記憶されている道路(過去に車両が逆走した道路)に合致し、且つ、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動、即ち、過去に車両が道路を逆走する手前において示した挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0010】
また、請求項6のナビゲーション装置によれば、警告動作実行手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動(過去に車両が道路を逆走する手前において示した挙動)の何れかに合致する場合に、直ちに所定の警告動作を実行する。
【0011】
この場合、請求項7のナビゲーション装置のように、警告動作実行手段は、退出不可能道路検出手段によって検出された退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を逆走挙動記憶手段から比較対象挙動として抽出し、車両が接続点特定手段によって特定された接続点の手前において示す挙動が比較対象挙動に合致する場合に、直ちに所定の警告動作を実行するように構成するとよい。
【0012】
また、請求項8のナビゲーション装置によれば、挙動判定手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が逆走挙動記憶手段に記憶されている挙動(過去に車両が道路を逆走する手前において示した挙動)の何れかに合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0013】
また、請求項9のナビゲーション装置によれば、挙動判定手段は、退出不可能道路検出手段によって検出された退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を逆走挙動記憶手段から比較対象挙動として抽出し、車両が接続点特定手段によって特定された接続点の手前において示す挙動が比較対象挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0014】
また、請求項10のナビゲーション装置によれば、警告動作実行手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が他車両挙動記憶手段に記憶されている挙動、即ち、接続点特定手段によって特定された接続点の手前において過去に他車両が示した挙動に合致する場合に、直ちに所定の警告動作を実行する。
【0015】
また、請求項11のナビゲーション装置によれば、挙動判定手段は、車両が接続点特定手段によって特定された接続点の手前において示す挙動が他車両挙動記憶手段に記憶されている挙動、即ち、接続点特定手段によって特定された接続点の手前において過去に他車両が示した挙動に合致する場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する。
【0016】
これら請求項2〜11のナビゲーション装置は、挙動判定手段による判定処理を実行するための条件、或いは、警告動作実行手段による所定の警告動作を実行するための条件を具体的に特定したものである。このように、本発明は、挙動判定手段による判定処理を実行するための条件および警告動作実行手段による所定の警告動作を実行するための条件として様々な条件を設定することができる。
【0017】
また、請求項12のナビゲーション装置によれば、挙動判定手段は、車両のウィンカーが接続方向検出手段によって検出された方向に操作された場合、または、車両のステアリングが接続方向検出手段によって検出された方向に操作された場合に、車両が接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断する。
この請求項12のナビゲーション装置は、挙動判定手段による判定処理の内容を具体的に特定したものであり、このような手段により判定処理を精度良く実行することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態に係るものであり、ナビゲーション装置の構成を概略的に示すブロック図
【図2】車両情報取得処理の内容を示すフローチャート
【図3】逆走推定処理の内容を示すフローチャート
【図4】パニックブレーキ判定処理の内容を示すフローチャート
【図5】現在走行中の道路、退出不可能道路、接続点、退出可能道路の一例を示す図
【図6】本発明の第2実施形態に係る図1相当図
【図7】図3相当図
【図8】本発明の第3実施形態に係る図1相当図
【図9】図3相当図
【図10】変形例に係る図9相当図
【図11】本発明の第4実施形態に係る図3相当図
【図12】変形例に係る図11相当図
【図13】本発明の第5実施形態に係る図1相当図
【図14】図3相当図
【図15】変形例に係る図14相当図
【図16】(a)〜(c)は道路の構成例を示す図
【図17】変形例に係る図16(c)相当図
【発明を実施するための形態】
【0019】
(第1実施形態)
以下、本発明の第1実施形態について図1から図5を参照しながら説明する。
図1に示すように、ナビゲーション装置10は、例えば自動車などの車両に搭載され、制御装置11、位置検出部12、RTC13(Real Time Clock)、地図データ入力部14、操作スイッチ部15、外部メモリ16、表示器17、音声コントローラ18、リモコンセンサ19、通信部20、車速センサ21などを備えている。また、制御装置11には、ブレーキ制御装置31、ウィンカー制御装置32、ステアリング制御装置33などの各種の装置類が車載LAN(図示せず)を介して接続されている。制御装置11は、図示しないCPU、ROMおよびRAMを有するマイクロコンピュータを主体として構成されている。ナビゲーション装置10は、制御装置11のCPUにおいて制御プログラムを実行することにより、退出不可能道路検出部41(退出不可能道路検出手段に相当)、接続方向検出部42(接続方向検出手段に相当)、接続点特定部43(接続点特定手段に相当)、挙動判定部44(挙動判定手段に相当)、逆走推定部45(逆走推定手段に相当)、警告動作実行部46(警告動作実行手段に相当)、基準減速度記憶部47をソフトウェアによって仮想的に実現する。
【0020】
位置検出部12は、方位センサ12a、ジャイロセンサ12b(ジャイロスコープ)、距離センサ12cおよびGPS受信器12dなどを有しており、ナビゲーション装置10が搭載された車両(自車両)の位置を検出する。方位センサ12aは、車両の方位を検出する。ジャイロセンサ12bは、車両の回転角度を検出する。距離センサ12cは、車両の走行距離を検出する。GPS受信器12dは、GPS(Global Positioning System)により車両の現在位置を測位するために、図示しないGPS衛星から送信される電波を受信する。
RTC13は、例えば日付や時刻など時間に関する情報を取得するための計時手段である。RTC13は、図示しない発信器が出力したクロックパルスのパルス数をカウントし、カウントしたカウント値が基準値に到達すると単位時間を示す単位時間信号を生成する。そして、RTC13は、生成した単位時間信号に基づいて端末時刻を生成する。
【0021】
地図データ入力部14は、地図データ記憶部14aから地図データを取得する。地図データ記憶部14aに記憶されている地図データは、複数のノードおよびノード同士をつなぐリンクにより形成された道路データ、背景データ、目印データ、マップマッチング用データ、目的地データ、交通情報を道路データに変換するためのテーブルデータなどの各種のデータを含んでいる。また、この地図データに含まれる道路データは、道路の種類(例えば、国道、高速道路、一般道路、細街路など)ごとに区別して記憶されている。この地図データには、地名、施設名、道路名や、これら各地点、各施設、各道路の位置などの情報が含まれている。また、この地図データは、走行可能方向データを含む。この走行可能方向データは、例えば道路の種類、道路の構造、道路に設定された交通規制などによって車両が走行できる方向が制限されている道路(例えば、高速道路におけるインターチェンジ、サービスエリア、パーキングエリア、ランプウェイなどの導入路や導出路、一般道路における一方通行道路、工事などにより一方通行に規制されている道路など)について、その走行可能方向(車両が走行できる方向)を示すデータである。また、この地図データは、各道路の接続点(例えば、交差点、分岐点、合流点など、異なる道路が相互に接続する地点)を示す接続点データを含む。
地図データ記憶部14aに記憶されている地図データは、図示しないドライブ装置によって地図データ入力部14に読み取られる。地図データ記憶部14aとしては、例えばDVDやCDなどの大容量記憶媒体、メモリカードあるいはハードディスクドライブなどの記憶媒体が用いられる。
【0022】
操作スイッチ部15は、表示器17の画面の近傍に設けられているメカニカルスイッチや、表示器17の画面に設けられているタッチパネルスイッチなどから構成されている。ユーザは、操作スイッチ部15の各スイッチを用いて、車両の目的地、表示器17の画面や表示態様の切り替え(例えば、地図縮尺の変更、メニュー画面の選択、経路の探索、経路案内の開始、現在位置の修正、音量の調整など)を行う各種のコマンドの入力を行う。これにより、ナビゲーション装置10は、ユーザの指示に従って作動する。リモコンセンサ19は、リモコン19aとの間でコマンドなどの送受信を行う。リモコン19aには、複数の操作スイッチが設けられている。リモコン19aの操作スイッチを操作することにより、リモコン19aからリモコンセンサ19を経由して各種の指令信号が制御装置11へ送信される。操作スイッチ部15およびリモコン19aは、何れの操作によっても制御装置11に同一の機能を実行させることができる。
【0023】
外部メモリ16は、例えば着脱可能なフラッシュメモリカードやハードディスクドライブによって構成されている。なお、外部メモリ16は、例えばナビゲーション装置10の制御装置11に設けられているRAMやEEPROM、あるいは地図データ記憶部14aなどと共用してもよい。表示器17は、例えば液晶や有機ELなどのカラーディスプレイを有している。表示器17の画面には、車両の現在位置周辺の地図が各種縮尺で表示されるとともに、この地図表示に重ねて車両の現在位置および進行方向を示す現在地マークN(例えば図5参照)が表示される。また、目的地までの経路案内を実行する場合には、表示器17の画面には経路案内用の画面が表示される。
音声コントローラ18は、車載スピーカ18aに接続している。音声コントローラ18は、制御装置11から入力した音声出力信号を車載スピーカ18aへ出力する。音声出力信号に基づいて車載スピーカ18aから出力される音声は、案内に関する音声、操作説明に関する音声、盗難防止機能の動作中であることを報知する音声、音声認識結果に応じたトークバック音声、後述する逆走推定処理における逆走警告音声などである。
【0024】
制御装置11は、車両が走行経路に沿って移動可能とするために、表示器17の画面に現在地周辺の道路地図を表示するとともに、車両の現在位置および進行方向を示す現在地マークNを道路に重ねて表示する。この場合、車両の走行に伴って現在地マークNの表示は、表示器17に表示された地図上を移動する。表示器17に表示された地図は、車両の現在位置に応じてスクロールされる。このとき、制御装置11は、車両の現在位置を道路上にあわせるマップマッチングを実施する。
通信部20は、例えば無線の通信回線を経由して、図示しない情報センターとの間でデータ通信を行う。即ち、通信部20は、各種のデータの送信機能および受信機能を有する。なお、情報センターは、例えば、渋滞情報、交通規制情報、事故情報、路面情報、イベント情報、店舗情報、気象情報、最新の地図データなどの各種の情報を保有している。
【0025】
ブレーキ制御装置31は、車両のブレーキが操作されているか否か(踏まれているか否か)を示す信号、さらには、ブレーキがどの程度操作されているか(どの程度踏まれているか)を示す信号を含む情報をブレーキ情報として出力する。
ウィンカー制御装置32は、車両のウィンカーが操作されているか否かを示す信号、さらには、ウィンカーが操作された方向(右側に操作されたか、或いは、左側に操作されたか)を示す信号を含む情報をウィンカー情報として出力する。
ステアリング制御装置33は、車両のステアリングが操作されているか否かを示す信号、さらには、ステアリングが操作された方向(右側に操作されたか、或いは、左側に操作されたか)を示す信号、および、ステアリングがどの程度操作されたか(ステアリングの回転量)を示す信号を含む情報をステアリング情報として出力する。
車速センサ21は、車両の速度を検出する。制御装置11は、車速センサ21が検出した車速を車速情報として取得する。
【0026】
退出不可能道路検出部41は、車両が現在走行中の道路に、現在走行中の道路とは異なる道路であって、且つ、車両が退出することができない道路である退出不可能道路が接続しているか否かを検出する。なお、退出不可能道路とは、例えば道路の種類、道路の構造、道路に設定された交通規制などによって車両が走行できる方向(走行可能方向)が一方向に制限されている道路であって、車両が現在走行中の道路を道なりに走行して当該道路に進入すると、その道路を車両が走行可能方向とは逆方向に走行(逆走)してしまうことになる道路である。
接続方向検出部42は、退出不可能道路検出部41によって検出された退出不可能道路が現在走行中の道路に対して接続する方向、即ち、退出不可能道路が現在走行中の道路に対して右側に接続されているのか、或いは、左側に接続されているのかを検出する。
接続点特定部43は、退出不可能道路検出部41によって検出された退出不可能道路が現在走行中の道路に接続する点(道路の交差点、分岐点、合流点など)を接続点として特定する。
挙動判定部44は、挙動判定処理を実行する。この挙動判定処理は、接続点特定部43によって特定された接続点の手前において、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したか否かを判定する処理である。
【0027】
逆走推定部45は、挙動判定部44による挙動判定処理によって、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したと判断された場合に、当該車両が退出不可能道路を逆走すると推定する。
警告動作実行部46は、逆走推定部45によって、車両が退出不可能道路を逆走すると推定された場合に、詳しくは後述する所定の警告動作を実行する。なお、この警告動作実行部46は、挙動判定部44による挙動判定処理によって、車両が接続方向検出部42によって検出された方向に曲がるための挙動を示したと判断された場合には、逆走推定部45の判断結果に関わらず、つまり、逆走推定部45によって、車両が退出不可能道路を逆走すると推定されたか否かに関わらず、後述する所定の警告動作を実行するように構成してもよい。
基準減速度記憶部47は、詳しくは後述する基準減速度を、ナビゲーション装置10が備えるメモリなどの記憶媒体に記憶する。また、この基準減速度記憶部47は、記憶した基準減速度を更新可能に構成されている。
ナビゲーション装置10の制御装置11は、これら退出不可能道路検出部41、接続方向検出部42、接続点特定部43、挙動判定部44、逆走推定部45、警告動作実行部46、基準減速度記憶部47などにより、後述する動作を実行可能に構成されている。
【0028】
次に、上述の構成のナビゲーション装置10の制御装置11が実行する動作内容、具体的には、車両情報取得処理および逆走推定処理の内容について順に説明する。
(車両情報取得処理)
図2は、ナビゲーション装置10の電源がオンされている間、制御装置11が定期的・周期的(例えば100msごと)に実行する車両情報取得処理の内容を示すフローチャートである。
ナビゲーション装置10の制御装置11は、まず、前回の車両情報取得処理において取得して記憶した各車両情報を消去する(ステップA1)。そして、制御装置11は、ブレーキ制御装置31からブレーキ情報を取得し(ステップA2)、ウィンカー制御装置32からウィンカー情報を取得し(ステップA3)、ステアリング制御装置33からステアリング情報を取得し(ステップA4)、車速センサ21からの入力信号に基づく車速情報を取得する(ステップA5)。そして、制御装置11は、取得した各車両情報(ブレーキ情報、ウィンカー情報、ステアリング情報、車速情報)を記憶する(ステップA6)。制御装置11は、これらステップA1〜A6の処理を繰り返し実行する。なお、この車両情報取得処理によって取得する車両情報は、上述のブレーキ情報、ウィンカー情報、ステアリング情報、車速情報に限られるものではなく、例えば、RTC13からの時刻情報、車載カメラからの画像情報、ドライバーの脈拍や心拍数を検出する生体センサからの生体情報など、種々の情報を必要に応じて取得することができる。
【0029】
(逆走推定処理)
図3は、ナビゲーション装置10の電源がオンされている間、制御装置11が定期的・周期的(例えば1sごと)に実行する逆走推定処理の内容を示すフローチャートである。なお、この逆走推定処理は、上述の車両情報取得処理と並列的に実行されるものである。
ナビゲーション装置10の制御装置11は、現在走行中の道路(例えば、図5に示す一般道路R1参照)に、車両(自車両)が退出することができない退出不可能道路(例えば、図5に示す高速道路Hの導出路R2参照)が接続しているか否かを判断する(ステップB1)。制御装置11は、現在走行中の道路に退出不可能道路が接続していると判断した場合(ステップB1:YES)には、検出された退出不可能道路が現在走行中の道路に対して接続する方向、即ち、退出不可能道路が現在走行中の道路に対して車両の進行方向に見て右側に接続されているのか、或いは、左側に接続されているのかを検出する(ステップB2)。例えば、図5に示す例では、制御装置11は、退出不可能道路R2が現在走行中の道路R1に対して車両の進行方向(図5では上方向)に見て「左側」に接続されていると判断する。
【0030】
また、制御装置11は、検出された退出不可能道路が現在走行中の道路に接続する点を接続点(例えば、図5に示す合流点C1参照)として特定する(ステップB3)。そして、制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離(例えば50m)以内であるか否かを判断する(ステップB4)。なお、このステップB4における所定距離は、適宜変更して設定することができるが、ドライバーが道路の交差点、分岐点、合流点の手前において車両の進行方向を曲げるための動作(例えば、ウィンカーの操作やステアリングの操作)を開始する距離として通常想定される距離を設定することが好ましい。また、一旦設定した所定距離を、例えば車両の速度に応じて動的に変更するように構成してもよい。
【0031】
制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離以内でない場合(ステップB4:NO)には、この逆走推定処理を終了する。一方、制御装置11は、車両の現在位置が、特定された接続点の手前において当該接続点から所定距離以内である場合(ステップB4:YES)には、ドライバーがパニックブレーキを踏んだか否かを判断する(ステップB5)。
【0032】
ここで、パニックブレーキを踏んだか否かの判定処理(パニックブレーキ判定処理)について図4に示すフローチャートを参照しながら説明する。
このパニックブレーキ判定処理では、制御装置11は、まず、初期化処理を実行する(ステップC1)。この初期化処理では、制御装置11は、パニックブレーキフラグ(後述するステップC6参照)が記憶されている場合には、そのパニックブレーキフラグを消去する。制御装置11は、初期化処理を完了すると、ブレーキ制御装置31から取得したブレーキ情報に基づいて、ブレーキが踏まれているか否かを判断する(ステップC2)。制御装置11は、ブレーキが踏まれていない場合(ステップC2:NO)には、前回のパニックブレーキ判定処理の実行時において記憶した車両の速度(前回の車速、後述するステップC4参照)を消去し(ステップC8)、このパニックブレーキ判定処理を終了する。一方、制御装置11は、ブレーキが踏まれている場合(ステップC2:YES)には、減速度の算出処理を実行する(ステップC3)。この減速度の算出処理では、制御装置11は、前回のパニックブレーキ判定処理の実行時において記憶した車両の速度(前回の車速、後述するステップC4参照)と現在の車両の速度(今回の車速)との差(車速差)を減速度として算出する。なお、前回のパニックブレーキ判定処理において、ステップC8により前回の車速を消去している場合には、制御装置11は、今回の車速を前回の車速とみなして減速度を算出する。即ち、この場合、算出される減速度は、今回の車速と今回の車速との差(実質的には「0」)である。
【0033】
次に、制御装置11は、今回の車速を記憶する(ステップC4)。そして、制御装置11は、上述の減速度の算出処理によって算出された減速度と基準減速度記憶部47によって記憶されている基準減速度との差が所定値(例えば、10km/h)以上であるか否かを判断する(ステップC5)。なお、このステップC5における所定値は、適宜変更して設定することができる。制御装置11は、算出された減速度と基準減速度との差が所定値以上である場合(ステップC5:YES)には、パニックブレーキを踏んだことを示すパニックブレーキフラグを記憶して(ステップC6)、このパニックブレーキ判定処理を終了する。一方、制御装置11は、算出された減速度と基準減速度との差が所定値以上でない場合(ステップC5:NO)には、基準減速度の更新処理を実行する(ステップC7)。
【0034】
この基準減速度の更新処理では、制御装置11は、ステップC3において算出された減速度に基づいて、基準減速度記憶部47によって記憶されている基準減速度(現基準減速度)を更新する。この場合、制御装置11は、算出された減速度と現基準減速度との平均値を算出し、算出された平均値を新たな基準減速度(新基準減速度)として更新する。従って、次回のパニックブレーキ判定処理では、ステップC5の判断処理において新基準減速度が使用される。なお、基準減速度の更新は、算出された減速度と現基準減速度との平均値を算出する方法に限られるものではなく、算出された減速度に基づく方法であれば、例えば、算出された減速度および現基準減速度にそれぞれ異なる重み付けを付加した値の平均値を新基準減速度として更新したり、算出された減速度をそのまま新たな基準減速度として更新するなど、種々の方法を採用することができる。ブレーキの踏み方(ブレーキの操作態様)は、ドライバーによって様々である。この基準減速度の更新処理は、上述のステップC5の判断処理の基準となる要素(基準減速度)に、ドライバーのブレーキの踏み方の特徴を反映させるための処理である。制御装置11は、基準減速度の更新処理を完了すると、このパニックブレーキ判定処理を終了する。
【0035】
制御装置11は、図3のステップB5の判断処理において、ドライバーがパニックブレーキを踏んだと判断した場合、即ち、パニックブレーキフラグが記憶されている場合(ステップB5:YES)には、ステップB8に移行する。一方、制御装置11は、ステップB5の判断処理において、ドライバーがパニックブレーキを踏んでいないと判断した場合、即ち、パニックブレーキフラグが記憶されていない場合(ステップB5:NO)には、上述のステップB3の処理によって特定された接続点の前後(車両の進行方向に沿う前後方向)において当該接続点から所定距離(例えば50m)以内に、他の道路(例えば、図5に示す高速道路Hの導入路R3参照)が存在するか否かを判断する(ステップB6)。なお、「他の道路」とは、現在走行中の道路に対して上述のステップB2において検出された方向(上述のステップB1の処理によって検出された退出不可能道路が現在走行中の道路に接続する方向)と同方向に接続する道路であって、且つ、検出された退出不可能道路とは異なる道路である。また、この「他の道路」として検出する道路は、退出可能道路(走行可能方向が一方向に制限されている道路であって、車両が現在走行中の道路を道なりに走行して当該道路に進入すると、その道路を車両が走行可能方向に走行することになる道路、例えば、図5に示す高速道路Hの導入路R3参照)のみに限定してもよいし、退出可能道路であるか退出不可能道路であるかに関わらず、接続点の前後所定距離以内に存在する道路を検出するようにしてもよい。また、このステップB6における所定距離は、適宜変更して設定することができるが、上述のステップB4における所定距離に近い値を設定することが好ましい。
【0036】
制御装置11は、他の道路が存在すると判断した場合(ステップB6:YES)には、この逆走推定処理を終了する。検出された退出不可能道路の近傍に他の道路が存在する場合、ドライバー(車両)は、退出不可能道路ではなく、その近傍の道路に進入する可能性もある。このような場合に、後述する逆走警告動作(ステップB10参照)を実行してしまうと、ドライバーが困惑するなどして、安全な走行支援に支障をきたす場合がある。従って、制御装置11は、検出された退出不可能道路の近傍に当該退出不可能道路と同方向に接続する他の道路が存在する場合(ステップB6:YES)には、誤警告を回避すべく、この逆走推定処理を終了する。
【0037】
一方、制御装置11は、上述のステップB6において、他の道路が存在しないと判断した場合(ステップB6:NO)には、車両の速度が所定値(例えば、10〜20km/h)以下であるか否かを判断する(ステップB7)。なお、このステップB7における所定値は、適宜変更して設定することができるが、車両がその進行方向を曲げることができる程度の速度に設定することが好ましい。
【0038】
制御装置11は、車両の速度が所定値以下でない場合(ステップB7:NO)には、この逆走推定処理を終了する。通常、ドライバーは、現在進行中の道路とは異なる道路に進入する場合(例えば、高速道路におけるインターチェンジなどの導入路に進入する場合や、一般道路において右折や左折をする場合など)には、車両を減速させるはずである。従って、車両の速度が所定値以下でない場合(ステップB7:NO)、即ち、車両が減速していない場合には、当該車両は、現在走行中の道路とは異なる道路に進入することなく、現在走行中の道路をそのまま走行し続けることが想定される。このような場合に、後述する逆走警告動作(ステップB10参照)を実行してしまうと、ドライバーが困惑するなどして、安全な走行支援に支障をきたす場合がある。従って、制御装置11は、車両が減速していない場合(ステップB7:NO)には、誤警告を回避すべく、この逆走推定処理を終了する。
一方、制御装置11は、上述のステップB7において、車両の速度が所定値以下であると判断した場合(ステップB7:YES)には、ステップB8に移行する。
【0039】
制御装置11は、ステップB8に移行すると、ウィンカー制御装置32から取得したウィンカー情報に基づいて、上述のステップB2において検出された方向(退出不可能道路が現在走行中の道路に接続する方向)に車両のウィンカーが操作されているか否かを判断する。制御装置11は、退出不可能道路が接続する方向と同方向にウィンカーが操作されている場合(ステップB8:YES)には、ステップB10に移行する。一方、制御装置11は、退出不可能道路が接続する方向と同方向にウィンカーが操作されていない場合(ステップB8:NO)には、ステアリング制御装置33から取得したステアリング情報に基づいて、上述のステップB2において検出された方向(退出不可能道路が現在走行中の道路に接続する方向)に車両のステアリングが操作されているか否かを判断する(ステップB9)。制御装置11は、退出不可能道路が接続する方向と同方向にステアリングが操作されている場合(ステップB9:YES)には、ステップB10に移行する。一方、制御装置11は、退出不可能道路が接続する方向と同方向にステアリングが操作されていない場合(ステップB9:NO)には、この逆走推定処理を終了する。即ち、制御装置11は、車両が、退出不可能道路が現在走行中の道路に接続する方向と同方向に曲がるための挙動を示したと判断した場合(ステップB8にてYESの場合、或いは、ステップB9にてYESの場合)に、車両が退出不可能道路を逆走すると推定し、ステップB10に移行する。なお、ステップB8の判断処理とステップB9の判断処理は、順序を入れ換えて実行してもよい。
【0040】
制御装置11は、ステップB10に移行すると、所定の逆走警告動作を実行する。この場合、制御装置11は、車載スピーカ18aを介して逆走警告音声(例えば「本車両は逆走するおそれがあります。注意してください。」といった逆走する可能性が高い旨を報知する音声)を出力する。なお、制御装置11は、逆走警告動作として、表示器17を介して逆走警告表示(例えば、ステップB1の処理によって検出された退出不可能道路を点滅などにより強調表示、或いは、逆走する可能性が高い旨を報知するテキストの表示など)を出力するように構成してもよい。また、制御装置11は、逆走警告動作として、逆走警告音声および逆走警告表示の双方を出力するように構成してもよい。
【0041】
以上に説明したように本実施形態によれば、ナビゲーション装置10の制御装置11は、車両が退出することができない退出不可能道路が現在走行中の道路に接続する接続点の手前において、車両が、退出不可能道路が現在走行中の道路に対して接続する方向に曲がるための挙動を示した場合(車両のウィンカーが、退出不可能道路側(退出不可能道路が接続する方向)に操作された場合、或いは、車両のステアリングが、退出不可能道路側(退出不可能道路が接続する方向)に操作された場合)、つまり、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、逆走警告音声、或いは、逆走警告表示による所定の逆走警告動作を実行する。これにより、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
【0042】
なお、本実施形態は、ステップB8の処理、或いは、ステップB9の処理からなる挙動判定処理(車両が、検出された退出不可能道路が現在走行中の道路に接続する方向に曲がるための挙動を示したか否かを判定するための処理)を実行するための条件として、パニックブレーキが踏まれた場合(「車両のブレーキが所定の態様で操作された場合」に相当、ステップB5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。
【0043】
(第2実施形態)
次に、本発明の第2実施形態について図6および図7を参照しながら説明する。
図6に示すように、本実施形態では、ナビゲーション装置10は、逆走道路データベース51(逆走道路記憶手段に相当)を備える。ナビゲーション装置10の制御装置11は、車両が退出不可能道路を逆走してしまった場合には、その退出不可能道路を特定するための情報(道路の名称、位置、種類、構造など)を逆走道路データベース51に記憶するようになっている。
【0044】
次に、本実施形態における逆走推定処理の動作内容について図7に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップD5の判断処理を実行するようになっている。このステップD5では、制御装置11は、ステップB1の処理によって検出された退出不可能道路が逆走道路データベース51に記憶されている道路、即ち、過去に車両が逆走してしまった退出不可能道路に合致するか否かを判断する。そして、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップD5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致しない場合(ステップD5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0045】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップD5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。
【0046】
(第3実施形態)
次に、本発明の第3実施形態について図8および図9を参照しながら説明する。
図8に示すように、本実施形態では、ナビゲーション装置10は、上述の逆走道路データベース51に加え、さらに逆走挙動データベース61(逆走挙動記憶手段に相当)を備える。また、ナビゲーション装置10の制御装置11は、車両情報取得処理(図2参照)によって取得した各車両情報を、随時更新するのではなく、所定期間(少なくとも、上述の逆走推定処理が実行される周期よりも長い期間)だけ蓄積するように構成されている。そして、制御装置11は、車両が退出不可能道路を逆走してしまった場合には、その退出不可能道路を特定するための情報を逆走道路データベース51に記憶するとともに、当該車両が当該退出不可能道路を逆走する手前において示した挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)を、蓄積した車両情報に基づいて解析し、逆走挙動データベース61に記憶するように構成されている。
【0047】
次に、本実施形態における逆走推定処理の動作内容について図9に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップE5aの判断処理およびステップE5bの判断処理を実行するようになっている。ステップE5aでは、制御装置11は、ステップB1の処理によって検出された退出不可能道路が逆走道路データベース51に記憶されている道路、即ち、過去に車両が逆走してしまった退出不可能道路に合致するか否かを判断する。そして、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致する場合(ステップE5a:YES)には、ステップE5bに移行する。
【0048】
このステップE5bでは、制御装置11は、車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、逆走挙動データベース61に記憶されている挙動に合致するか否かを判断する。そして、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5b:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。
【0049】
一方、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致しない場合(ステップE5a:NO)、或いは、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致しない場合(ステップE5b:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0050】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致し、且つ、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5aにて「YES」、且つ、ステップE5bにて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップE5bによる判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0051】
また、本実施形態に代わり、図10に示すように、制御装置11は、検出された退出不可能道路が逆走道路データベース51に記憶されている道路に合致し、且つ、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動に合致する場合(ステップE5aにて「YES」、且つ、ステップE5bにて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップE5bによる判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0052】
(第4実施形態)
次に、本実施形態の第4実施形態について図11を参照しながら説明する。
上述の第3実施形態に示した逆走挙動データベース61には、過去に実行された逆走推定処理において検出された退出不可能道路、つまり、今回の逆走推定処理において検出される退出不可能道路とは必ずしも一致しない退出不可能道路について、その道路を車両が逆走したときの挙動を示すデータが蓄積される。本実施形態は、このように逆走挙動データベース61に蓄積されるデータ(過去に別の道路において発生した逆走に関するデータ)を利用して逆走推定処理を実行するものである。
【0053】
即ち、本実施形態では、図11に示すように、ナビゲーション装置10の制御装置11は、上述のステップE5a,E5bの判断処理に代わり、ステップF5の判断処理を実行するようになっている。このステップF5では、制御装置11は、車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、ブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、逆走挙動データベース61に記憶されている挙動の何れかに合致するか否かを判断する。そして、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れにも合致しない場合(ステップF5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0054】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、本実施形態は、挙動判定処理を実行するための条件として、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップF5による判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0055】
また、本実施形態に代わり、図12に示すように、制御装置11は、車両が接続点の手前において示す挙動が逆走挙動データベース61に記憶されている挙動の何れかに合致する場合(ステップF5にて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップF5による判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0056】
(第5実施形態)
次に、本発明の第5実施形態について図13および図14を参照しながら説明する。
図13に示すように、本実施形態では、ナビゲーション装置10は、他車両挙動データベース71(他車両挙動記憶手段に相当)を備える。図示はしないが、他車両に搭載されたナビゲーション装置の制御装置は、当該他車両が備える接続点特定部によって特定された接続点の手前において当該他車両が示した挙動(例えば、他車両におけるブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)に係る情報(他車両挙動情報)を、通信部を介して情報センターに送信するように構成されている。そして、自車両に搭載されたナビゲーション装置10の制御装置11は、通信部20を介して、情報センターから他車両挙動情報を受信し、受信した他車両挙動情報を他車両挙動データベース71に記憶するように構成されている。
【0057】
次に、本実施形態における逆走推定処理の動作内容について図14に示すフローチャートを参照しながら説明する。即ち、本実施形態では、ナビゲーション装置10の制御装置11は、上述のステップB5の判断処理に代わり、ステップG5の判断処理を実行するようになっている。このステップG5では、制御装置11は、自車両がステップB3の処理によって特定された接続点の手前において示す挙動(例えば、自車両におけるブレーキ操作の態様、ウィンカー操作の態様、ステアリング操作の態様、車速の減速の態様など)が、他車両挙動データベース71に記憶されている他車両挙動情報が示す挙動(他車両の挙動)に合致するか否かを判断する。そして、制御装置11は、自車両が接続点の手前において示す挙動が他車両の挙動に合致する場合(ステップG5:YES)には、挙動判定処理(ステップB8,B9の処理)を実行する。一方、制御装置11は、自車両が接続点の手前において示す挙動が他車両の挙動に合致しない場合(ステップG5:NO)には、所定条件(ステップB6にて「NO」、且つ、ステップB7にて「YES」)の下で挙動判定処理を実行し、当該所定条件を満たさない場合には挙動判定処理を実行しないようになっている。
【0058】
以上に説明した本実施形態によっても、車両が退出不可能道路を逆走する可能性が高いと判断できる場合には、車両が逆走を開始する前にドライバーに警告して注意喚起することができ、安全な走行支援を行うことができる。
なお、自車両に搭載されたナビゲーション装置10の制御装置11は、情報センターを介することなく、他車両に搭載されたナビゲーション装置から他車両挙動情報を直接受信するように構成してもよい。
【0059】
また、本実施形態は、挙動判定処理を実行するための条件として、車両が接続点の手前において示す挙動が他車両挙動データベース71に記憶されている他車両の挙動に合致する場合(ステップG5にて「YES」の場合)、或いは、検出された退出不可能道路(接続点)の近傍に他の道路が存在せず、且つ、車両の速度が所定値以下となった場合(ステップB6にて「NO」、且つ、ステップB7にて「YES」の場合)の何れかを満たすことを設定したものである。即ち、本実施形態は、ステップG5による判定処理とステップB8,B9からなる挙動判定処理とによって、車両の挙動のチェックを多重化して実行するものであり、これにより、車両が退出不可能道路を逆走するか否かの判断精度を一層向上することができ、また、逆走警告処理を行う際に慎重を期すことができ、誤警告してしまう可能性を格段に低くすることができる。
【0060】
また、本実施形態に代わり、図15に示すように、制御装置11は、車両が接続点の手前において示す挙動が他車両挙動データベース71に記憶されている他車両の挙動に合致する場合(ステップG5にて「YES」の場合)には、直ちに逆走警告動作(ステップB10)を実行するように構成してもよい。即ち、ステップG5による判定処理の結果、車両が逆走してしまう可能性が少しでも存在するのであれば、車両の挙動のチェックを多重化して実行するまでもなく、即座に逆走警告処理を実行することにより、逆走発生の可能性を格段に低くすることができる。
【0061】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば以下のように変形または拡張することができる。
例えば、上記第5実施形態にて図14、或いは、図15に示すフローチャートのステップG5では、自車両がステップB3の処理によって特定された接続点の手前において示す挙動(自車両の挙動)と、他車両挙動データベース71に記憶されている全ての他車両挙動情報が示す挙動(他車両の挙動)とを比較するように構成してもよい。より好ましくは、他車両挙動データベース71に記憶されている他車両の挙動のうち自車両の運転者に似た運転特性(運転の癖や傾向)を有する他車両の挙動を抽出し、自車両の挙動と、その抽出された他車両の挙動とを比較するように構成するとよい。
【0062】
即ち、ナビゲーション装置10は、他車両挙動データベース71を構築する際に、記憶する他車両挙動情報を、運転特性(アクセル操作の態様、ブレーキ操作の態様、平均走行速度、車種などの各種データ)に基づいて複数のグループに分類可能に構成しておく。具体的には、例えば、アクセル操作やブレーキ操作が標準的なグループ、アクセル操作やブレーキ操作が荒っぽいグループ、アクセル操作やブレーキ操作が非常に丁寧なグループといった具合に分類しておく。これにより、ナビゲーション装置10の制御装置11は、ステップG5の判断処理において、自車両と同一、或いは、近似するグループに属する他車両の挙動、つまり、自車両の運転特性に似た他車両の挙動を抽出することが可能となる。
【0063】
また、ナビゲーション装置10は、自車両における普段の運転特性の履歴(アクセル操作やブレーキ操作の履歴)を情報センターにアップロードして登録し、情報センターは、アップロードされた運転特性の履歴を当該履歴情報をアップロードした自車両に対応付けて上述のようなグループに分類して記憶するように構成する。この構成によれば、自車両がどのグループに所属しているのかが情報センターにて把握できるようになる。そして、情報センターは、自車両と同一、或いは、近似するグループに属する他車両の挙動(他車両挙動情報)のみをナビゲーション装置10に送信するように構成してもよい。この構成によっても、ナビゲーション装置10の制御装置11は、ステップG5の判断処理において、自車両と同一、或いは、近似するグループに属する他車両の挙動、つまり、自車両の運転特性に似た他車両の挙動を抽出することが可能となる。
このようにすれば、自車両の挙動と他車両の挙動とを比較する場合に、自車両の運転傾向に極力近い他車両の挙動と比較することができるため、自車両の逆走の可能性を一層精度良く推定することが可能となる。
【0064】
また、例えば、上記第5実施形態の技術的思想を上記第4実施形態に適用することも当然に可能である。即ち、上記第5実施形態では、自車両がこれから差し掛かる退出不可能道路の接続点の手前において、他車両が逆走前に示した挙動と自車両の挙動とを比較するように構成した。これに代わり、自車両がこれから差し掛かる退出不可能道路の接続点の手前において、その退出不可能道路とは異なる道路において他車両が当該異なる道路を逆走する前に示した挙動と自車両の挙動とを比較するように構成してもよい。
この構成によれば、特に、自車両がこれから差し掛かる退出不可能道路の接続点付近を初めて走行する場合や、その退出不可能道路を過去に逆走した他車両の挙動情報がデータベースに存在しない場合であっても、自車両が、その退出不可能道路を逆走するかどうかを有効に推定することが可能となる。
【0065】
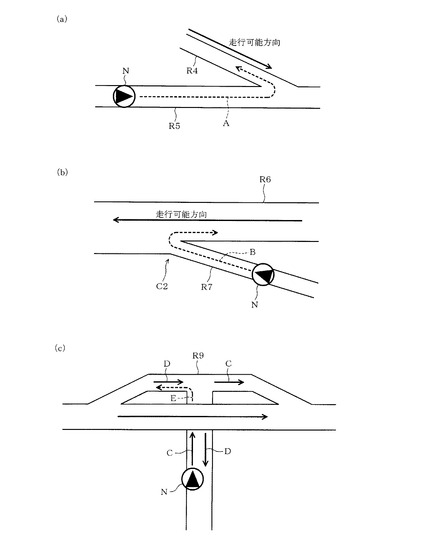
なお、本発明により逆走の防止を図ることができる道路の構成(形状)は、多種多様である。例えば、図16(a)に示す例は、退出不可能道路である高速道路の導出路R4が、車両が現在走行中の一般道路R5に対して車両の進行方向(図16(a)では右方向)に見て左側に接続する場合の例であり、本発明によれば、車両が、誤って導出路R4に進入して逆走してしまうこと(破線矢印Aに示す方向に走行してしまうこと)を未然に防止することができる。また、図16(b)に示す例は、退出不可能道路である高速道路の本線R6の一部(接続点C2よりも下流側の部分、図16(b)では接続点C2よりも右側の部分)が、車両が現在走行中の導入路R7に対して車両の進行方向に見て右側に接続する場合の例であり、本発明によれば、車両が、誤って高速道路の本線R6を逆走してしまうこと(破線矢印Bに示す方向に走行してしまうこと)を未然に防止することができる。また、図16(c)に示す例は、特殊な構造のインターチェンジの例である。この場合、高速道路の本線R8には、T字状の取付道R9が接続されており、この取付道R9では、車両は実線矢印C,Dに示す方向に走行することができる。このような構造の道路においても、本発明によれば、車両が、誤って取付道R9を逆走してしまうこと(破線矢印Eに示す方向に逆走してしまうこと)を未然に防止することができる。なお、図16に示した例は、本発明により逆走の防止を図ることができる道路の一例に過ぎず、本発明を適用することができる道路は、図16に示す例に限られるものではない。
【0066】
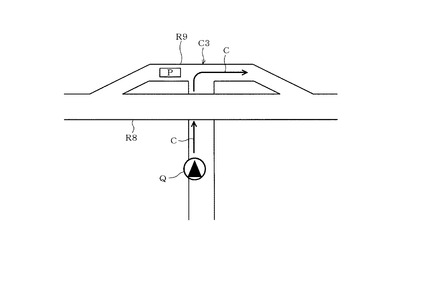
また、例えば図17に示すように、退出不可能道路(この場合、取付道R9のうち接続点C3よりも下流側の部分、図17では接続点C3よりも左側の部分)に他車両Pが存在する場合には、自車両Qのドライバーは、当該他車両Pを認識することで、取付道R9を規定の方向(実線矢印C方向)に進行する可能性が高まり、その分、逆走が発生する可能性は低くなる。つまり、車両(ドライバー)が逆走するかしないかは、当該車両が接続点(逆走ポイント)に差し掛かるときの周囲の状況にも影響される場合がある。そこで、車両の逆走が発生した場合には、例えば、車載カメラ、或いは、路上に設定された路上カメラなどのインフラ設備を利用して、その逆走が発生したときの周囲の状況(例えば、退出不可能道路に他車両が存在したか否かなど)も記録し、その記録情報を例えば情報センターに蓄積する構成としてもよい。そして、ナビゲーション装置10の制御装置11は、接続点に差し掛かるときに、そのときの状況に一致する状況、或いは、極力近似する状況のデータを取得し、その取得したデータに基づいて逆走判定処理を実行するようにしてもよい。即ち、ナビゲーション装置10の制御装置11は、取得したデータが示す状況と現在の車両の状況とが合致、或いは、近似する場合には、逆走警告動作を実行するように構成してもよい。
【符号の説明】
【0067】
図面中、10はナビゲーション装置、41は退出不可能道路検出部(退出不可能道路検出手段)、42は接続方向検出部(接続方向検出手段)、43は接続点特定部(接続点特定手段)、44は挙動判定部(挙動判定手段)、45は逆走推定部(逆走推定手段)、46は警告動作実行部(警告動作実行手段)、51は逆走道路データベース(逆走道路記憶手段)、61は逆走挙動データベース(逆走挙動記憶手段)、71は他車両挙動データベース(他車両挙動記憶手段)を示す。
【特許請求の範囲】
【請求項1】
走行中の道路に、車両が退出することができない退出不可能道路が接続しているか否かを検出する退出不可能道路検出手段と、
前記退出不可能道路検出手段によって検出された前記退出不可能道路が走行中の道路に対して接続する方向を検出する接続方向検出手段と、
前記退出不可能道路検出手段によって検出された前記退出不可能道路が走行中の道路に接続する点を接続点として特定する接続点特定手段と、
前記接続点特定手段によって特定された前記接続点の手前において、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する挙動判定手段と、
前記挙動判定手段によって車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、所定の警告動作を実行する警告動作実行手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記挙動判定手段は、車両のブレーキが所定の態様で操作された場合、または、車両の速度が所定値以下となった場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
車両が逆走した道路を記憶する逆走道路記憶手段を備え、
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記警告動作実行手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致し、且つ、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致し、且つ、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項3に記載のナビゲーション装置。
【請求項6】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記警告動作実行手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動の何れかに合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
前記警告動作実行手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を前記逆走挙動記憶手段から比較対象挙動として抽出し、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記比較対象挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項6に記載のナビゲーション装置。
【請求項8】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記挙動判定手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動の何れかに合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項9】
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を前記逆走挙動記憶手段から比較対象挙動として抽出し、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記比較対象挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項8に記載のナビゲーション装置。
【請求項10】
前記接続点特定手段によって特定された前記接続点の手前において他車両が示した挙動を記憶する他車両挙動記憶手段を備え、
前記警告動作実行手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記他車両挙動記憶手段に記憶されている挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項11】
前記接続点特定手段によって特定された前記接続点の手前において他車両が示した挙動を記憶する他車両挙動記憶手段を備え、
前記挙動判定手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記他車両挙動記憶手段に記憶されている挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項12】
前記挙動判定手段は、車両のウィンカーが前記接続方向検出手段によって検出された方向に操作された場合、または、車両のステアリングが前記接続方向検出手段によって検出された方向に操作された場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断することを特徴とする請求項1から11の何れか1項に記載のナビゲーション装置。
【請求項1】
走行中の道路に、車両が退出することができない退出不可能道路が接続しているか否かを検出する退出不可能道路検出手段と、
前記退出不可能道路検出手段によって検出された前記退出不可能道路が走行中の道路に対して接続する方向を検出する接続方向検出手段と、
前記退出不可能道路検出手段によって検出された前記退出不可能道路が走行中の道路に接続する点を接続点として特定する接続点特定手段と、
前記接続点特定手段によって特定された前記接続点の手前において、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定する挙動判定手段と、
前記挙動判定手段によって車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断された場合に、所定の警告動作を実行する警告動作実行手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
前記挙動判定手段は、車両のブレーキが所定の態様で操作された場合、または、車両の速度が所定値以下となった場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
車両が逆走した道路を記憶する逆走道路記憶手段を備え、
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記警告動作実行手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致し、且つ、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項3に記載のナビゲーション装置。
【請求項5】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路が前記逆走道路記憶手段に記憶されている道路に合致し、且つ、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項3に記載のナビゲーション装置。
【請求項6】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記警告動作実行手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動の何れかに合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
前記警告動作実行手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を前記逆走挙動記憶手段から比較対象挙動として抽出し、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記比較対象挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項6に記載のナビゲーション装置。
【請求項8】
車両が道路を逆走する手前において示した挙動を記憶する逆走挙動記憶手段を備え、
前記挙動判定手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記逆走挙動記憶手段に記憶されている挙動の何れかに合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項9】
前記挙動判定手段は、前記退出不可能道路検出手段によって検出された前記退出不可能道路とは異なる道路を車両が逆走する手前において示した挙動を前記逆走挙動記憶手段から比較対象挙動として抽出し、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記比較対象挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項8に記載のナビゲーション装置。
【請求項10】
前記接続点特定手段によって特定された前記接続点の手前において他車両が示した挙動を記憶する他車両挙動記憶手段を備え、
前記警告動作実行手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記他車両挙動記憶手段に記憶されている挙動に合致する場合に、直ちに所定の警告動作を実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項11】
前記接続点特定手段によって特定された前記接続点の手前において他車両が示した挙動を記憶する他車両挙動記憶手段を備え、
前記挙動判定手段は、車両が前記接続点特定手段によって特定された前記接続点の手前において示す挙動が前記他車両挙動記憶手段に記憶されている挙動に合致する場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したか否かを判定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項12】
前記挙動判定手段は、車両のウィンカーが前記接続方向検出手段によって検出された方向に操作された場合、または、車両のステアリングが前記接続方向検出手段によって検出された方向に操作された場合に、車両が前記接続方向検出手段によって検出された方向に曲がるための挙動を示したと判断することを特徴とする請求項1から11の何れか1項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−127790(P2012−127790A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−279246(P2010−279246)
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]