
ナビゲーション装置
【課題】合流対象である移動体の位置を取得し、かつ、表示可能なナビゲーション装置を提供する。
【解決手段】移動体との合流場所への経路を表示手段29に表示して誘導を行うナビゲーション装置20において、前記移動体の位置を取得する取得手段32と、前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段24と、を備える構成とする。
【解決手段】移動体との合流場所への経路を表示手段29に表示して誘導を行うナビゲーション装置20において、前記移動体の位置を取得する取得手段32と、前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段24と、を備える構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体との合流場所までの経路を案内するナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両に搭載され、移動体から受信した位置情報に基づいて合流場所を設定し、合流場所までの経路を案内するナビゲーション装置が知られている(例えば、特許文献1参照)。このナビゲーション装置では、経路誘導開始時に合流場所までの誘導経路を検索して誘導を開始し、車両が合流場所の周辺に接近すると、移動体から位置情報を再度受信して合流場所を再設定し、誘導経路を再検索して誘導を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−240573号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の構成では、車両が合流場所の周辺に接近したときのみ移動体の位置を受信するため、車両側のナビゲーション装置は移動する移動体の位置を把握できない。また、移動する移動体の位置は表示されていなかった。
本発明は、上述した事情に鑑みてなされたものであり、合流対象である移動体の位置を取得し、かつ、表示可能なナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、移動体との合流場所への経路を表示手段に表示して誘導を行うナビゲーション装置において、前記移動体の位置を取得する取得手段と、前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段と、を備えたことを特徴とする。
【0006】
上記構成において、前記表示切替手段は、前記表示手段に表示する地図の範囲外に前記移動体が位置する間に、自己の位置と、前記移動体が位置する方向を表示してもよい。
【発明の効果】
【0007】
本発明によれば、移動体との間の距離が所定距離より離れている間は、移動体の方向を自己の位置とともに表示できる。また、移動体との間の距離が所定距離以下の間は、移動する移動体の位置を所定時間毎に取得でき、移動する移動体の位置を自己の位置とともに所定時間毎に更新して表示できる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態に係るナビゲーション装置を適用したナビゲーションシステムの機能的構成を示すブロック図である。
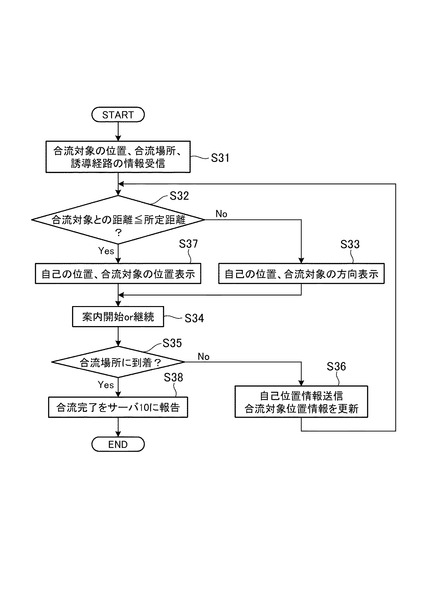
【図2】合流処理におけるナビゲーションシステム全体の動作を示すフローチャートである。
【図3】合流処理におけるサーバ内処理を示すフローチャート。
【図4】合流処理におけるナビゲーション装置内処理を示すフローチャート。
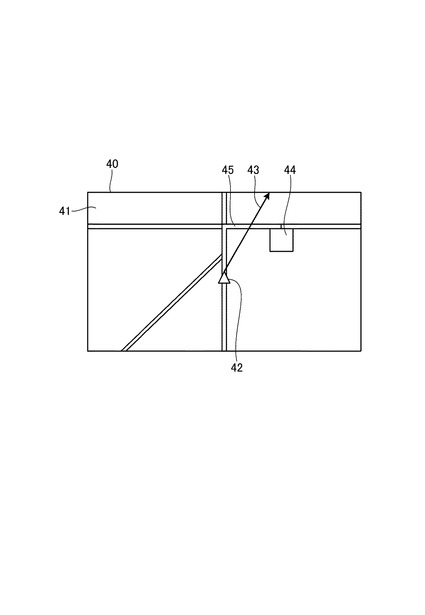
【図5】合流対象との間の距離が所定距離より離れている場合のナビゲーション画面を示す図である。
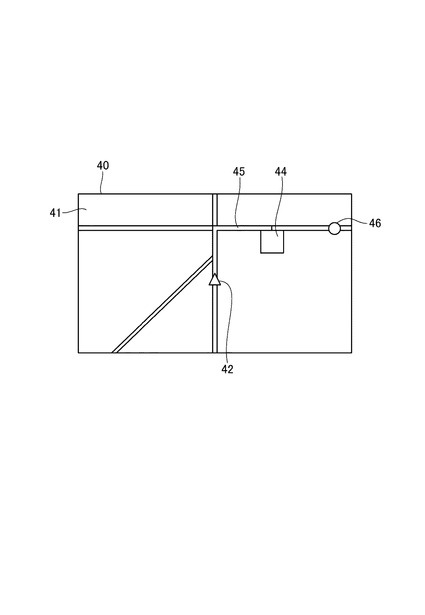
【図6】合流対象との間の距離が所定距離以下の場合のナビゲーション画面を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施の形態について説明する。以下の説明では、ナビゲーション装置として、移動体である自動車に搭載される車載型のナビゲーション装置(いわゆる、カーナビゲーション装置)について例示する。
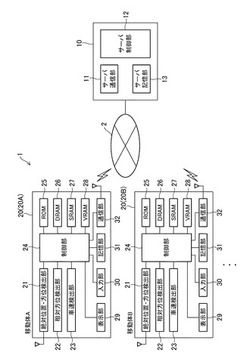
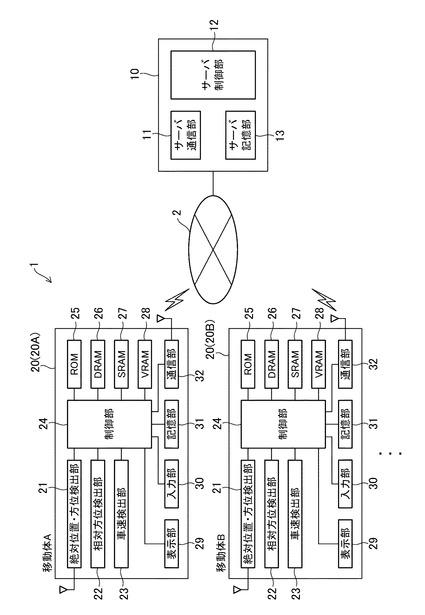
図1は、実施の形態に係るナビゲーション装置を適用したナビゲーションシステムの機能的構成を示すブロック図である。
ナビゲーションシステム1は、サーバ10と、複数のナビゲーション装置20とを備えて構成され、サーバと10とナビゲーション装置20はインターネット等のネットワーク2を介して相互に通信可能である。
【0010】
サーバ10は、サーバ通信部11と、サーバ制御部12と、サーバ記憶部13とを備えている。サーバ通信部11は、サーバ制御部12の制御の下、合流をしようとする複数のナビゲーション装置20からその位置情報(自己位置情報)と、合流対象を指定するための合流対象情報とを受信し、サーバ制御部12に出力する。サーバ制御部12は、受信した情報に基づいて合流場所を検索して選択し、選択した合流場所までの各ナビゲーション装置20の誘導経路を検索する。上記サーバ通信部11は、サーバ制御部12の制御の下、合流対象の位置、合流場所、及び合流場所までの誘導経路の情報を、当該合流を所望するナビゲーション装置20に送信する。サーバ記憶部13は、サーバ制御部12の制御の下、サーバ通信部11で受信された各ナビゲーション装置20の自己位置情報を記憶する。また、サーバ記憶部13には、合流場所検索を実現するためのプログラムや合流場所までの誘導経路検索を実現するためのプログラム等の各種プログラム、合流場所及び合流場所までの誘導経路を検索する際に使用する地図データや、道路データ、施設データ等の各種のデータが記憶されている。
【0011】
ナビゲーション装置20は、絶対位置・方位検出部21と、相対方位検出部22と、車速検出部23と、制御部24と、ROM25と、DRAM26と、SRAM27と、VRAM28と、表示部(表示手段)29と、入力部30と、記憶部31と、通信部(取得手段)32とを備えている。
絶対位置・方位検出部21は、GPS(Global Positioning System)衛星から送信されているGPS電波を受信するアンテナ(レシーバでも良い)を備え、ナビゲーション装置20が搭載される自動車の現在地、すなわち自車位置の地表における絶対的な位置座標及び方位をGPS電波に基づいて計算し制御部24に出力する。相対方位検出部22は、ジャイロセンサを有し、自車位置の相対的な方位を検出して制御部24に出力する。車速検出部23は、自動車より得られる車速パルスを処理して、自車両の速度を制御部24に出力する。
【0012】
制御部24は、ナビゲーション装置20の各部の制御や、ナビゲーション機能のための処理とった各種の処理を実行するものであり、演算手段としてのCPUや、その他の周辺回路を備えている。ROM25は、制御プログラムやBIOS(Basic Input Output System)、装置起動のためのブートプログラム、ナビゲーション機能を実現するためのプログラムといった各種プログラムを予め格納するものであり、制御部24によりアクセス可能になされている。また、DRAM26は揮発性メモリであり制御部24のワークエリアとして用いられる。また、SRAM27は不揮発性メモリであり、自動車のアクセサリ電源等のメイン電源(図示せず)から電力が供給されると共に、当該メイン電源がオフの間は、電池などの予備電源(図示せず)から電力が供給されて記憶内容を常時保持可能に構成され、バックアップメモリとして機能する。また、VRAM28は、表示部29に表示される画面データが書き込まれるバッファメモリである。
【0013】
表示部29は、制御部24の下、ナビゲーションのための地図や自車位置を示すナビゲーション画面、操作画面等の各種の情報を表示するものであり、例えばLCD(Liquid Crystal Display)やEL(Electro Luminescent)ディスプレイ等のディスプレイ装置を備えている。入力部30は、ユーザの指示操作を受け付け、ナビゲーション装置20に配設される複数の操作子や、表示部29が備えるディスプレイ装置に設けられたタッチパネル(不図示)を備えている。なお、入力部30は、ナビゲーション装置20をリモートコントローラ等により遠隔操作可能に構成されてもよい。
【0014】
記憶部31は、例えばCD−ROMドライブやDVD-ROMドライブ、ハードディスクドライブ、SSD(Solid State Drive)といった記憶装置であり、制御部24の制御の下、ナビゲーションに使用される地図データや、施設の場所を含む施設データ等の各種のデータを記憶する。
通信部32は、制御部24の制御の下、ネットワーク2を介してサーバ10と通信し、自己位置情報及び合流対象情報をサーバ10に送信するとともに、サーバ10から合流対象の位置、合流場所、及び誘導経路の情報を受信する。
【0015】
以上の構成の下、ユーザにより入力部30から目的地が入力されると、制御部24は、絶対位置・方位検出部21により検出された自車位置から目的地までの誘導経路を探索して、所定縮尺の地図と自車位置と誘導経路とを表示部29のナビゲーション画面に表示する。所定縮尺は、誘導経路を示すに最適な縮尺、あるいは、ユーザによって設定された縮尺である。また、自動車の走行中においては、制御部24は、相対方位検出部22及び車速検出部23の検出結果に基づいて自律航法により算出した自車位置を、絶対位置・方位検出部21により検出された自車位置により補正するハイブリッド航法により、高精度に求めた自車位置を地図上に表示して、誘導経路を案内する。
また、ユーザにより入力部30から合流対象を指定する合流対象情報が入力されると、制御部24は合流処理を実行する。なお、以下の説明において、移動体Aに搭載されるナビゲーション装置20にナビゲーション装置20Aと、移動体Bに搭載されるナビゲーション装置20にナビゲーション装置20Bと符号を付して各々を区別する。
【0016】
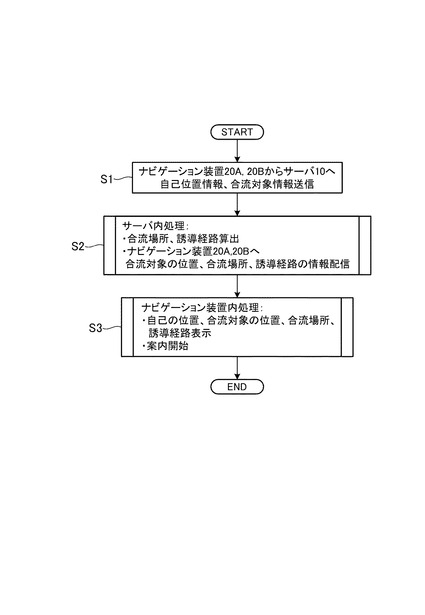
図2は、合流処理におけるナビゲーションシステム1全体の動作を示すフローチャートである。
まず、各ナビゲーション装置20A,20Bでは、制御部24が、絶対位置・方位検出部21により検出された自車位置の情報(自己位置情報)と、入力された合流対象情報とをサーバ10に送信する(ステップS1)。ここで、合流対象情報は、合流対象となるナビゲーション装置20A,20B又は移動体A,Bを特定する情報であり、例えば、ナビゲーション装置20A,20B又は移動体A,Bのそれぞれに固有に付されたIDである。
【0017】
次いで、サーバ10では、サーバ制御部12が、ナビゲーション装置20A,20Bから受信した情報に基づいて、合流場所と、各ナビゲーション装置20A,20Bから合流場所までの誘導経路とを算出し、各ナビゲーション装置20A,20Bに、合流対象の位置、合流場所、及び誘導経路の情報を配信する(ステップS2)。
そして、ナビゲーション装置20A,20Bでは、制御部24が、サーバ10から受信した情報に基づいて、地図と自車位置と合流対象の位置と誘導経路とを表示部29のナビゲーション画面に表示するとともに、誘導経路の案内を開始する(ステップS3)。
【0018】
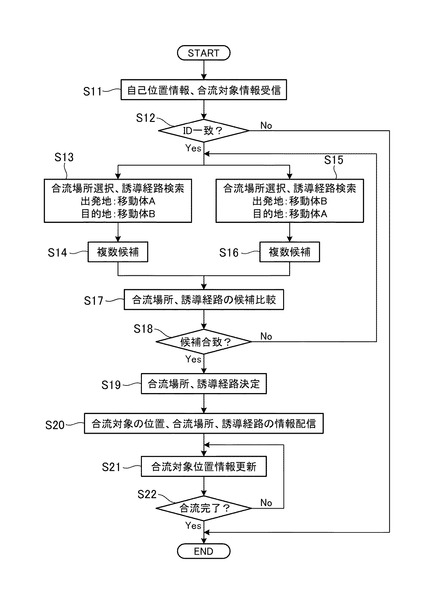
図3は、合流処理におけるサーバ内処理を示すフローチャートである。
まず、サーバ制御部12は、ナビゲーション装置20A,20Bから、各々の自己位置情報と、合流対象であるナビゲーション装置20B,20Aを指定する合流対象情報とを受信する(ステップS11)。ここで、サーバ制御部12は、各ナビゲーション装置20A,20Bの自己位置情報をサーバ記憶部13に記憶する。
次いで、サーバ制御部12は、例えば、ナビゲーション装置20Aから受信した合流対象情報(ID)と、ナビゲーション装置20Aを合流対象として指定するナビゲーション装置20Bの情報(ID)を比較し、当該IDが一致するか否か判別する(ステップS12)。
IDが一致しない場合(ステップS12:No)、サーバ制御部12は処理を終了する。
【0019】
IDが一致すると(ステップS12:Yes)、サーバ制御部12は、各ナビゲーション装置20A,20Bの自己位置情報を参照し、一方の移動体A(ナビゲーション装置20A)の位置を出発地とし、他方の移動体B(ナビゲーション装置20B)の位置を目的地として、合流場所を検索する。次いで、サーバ制御部12は、検索した複数の合流場所の候補から1つを選択するとともに、当該合流場所までの各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS13)。このとき、サーバ制御部12は、ナビゲーション装置20A,20Bの周辺もしくは中間地点にある目標物を、道路データや施設のデータ等予め用意されたデータから検索する。目標物の種類は自由であるが、例えばコンビニエンスストアや飲食店のように駐停車スペースがあって交通の妨げにならない場所が望ましい。
そして、サーバ制御部12は、合流場所の複数の候補地について、各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS14)。
【0020】
ステップS13,14と同様に、サーバ制御部12は、他方の移動体B(ナビゲーション装置20B)の位置を出発地とし、一方の移動体A(ナビゲーション装置20A)の位置を目的地として、合流場所を検索して選択するとともに、当該合流場所までの各ナビゲーション装置20A,20Bの誘導経路を検索し(ステップS15)、合流場所の複数の候補地について、各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS16)。
サーバ制御部12は、ステップS13,14で検索した合流場所及び誘導経路の検索結果と、ステップS15,16で検索した合流場所及び誘導経路の検索結果とを比較し(ステップS17)、ステップS13,14の検索結果と、ステップS15,16の検索結果とが合致するか否か判別する(ステップS18)。
【0021】
検索結果が合致しない場合(ステップS18:No)、サーバ制御部12は、処理をステップS13及びS15に移行し、合流場所及び誘導経路を再度検索する。
検索結果が合致する場合(ステップS18:Yes)、サーバ制御部12は、合致した検索結果から合流場所及び各ナビゲーション装置20A,20Bの誘導経路を決定し(ステップS19)、各ナビゲーション装置20A,20Bに、合流対象の位置、合流場所、及び誘導経路の情報を配信する(ステップS20)。
【0022】
次いで、サーバ10には、所定時間t毎にナビゲーション装置20A,20Bから各々の自己位置情報及び合流対象情報が送信され、サーバ制御部12は、所定時間t毎に、各ナビゲーション装置20A,20Bに合流対象の位置の情報(合流対象位置情報)を配信して更新する(ステップS21)。そして、サーバ制御部12は、ナビゲーション装置20A,20Bから合流が完了した旨の情報を受信したか否か判別する(ステップS22)。
サーバ制御部12は、ナビゲーション装置20A,20Bから合流が完了した旨の情報を受信するまで(ステップS22:No)、ステップS21の処理を繰り返す。ここで、ナビゲーション装置20A,20Bのいずれかから合流が完了した旨の情報を受信すると、サーバ制御部12は、当該情報を送信したナビゲーション装置20への合流対象位置情報の配信を停止する。
全て(両方)のナビゲーション装置20A,20Bから合流が完了した旨の情報を受信すると(ステップS22:Yes)、サーバ制御部12は処理を終了する。
【0023】
図4は、合流処理におけるナビゲーション装置20A,20B内の処理を示すフローチャートである。図5は合流対象との間の距離が所定距離より離れている場合のナビゲーション画面を示す図であり、図6は合流対象との間の距離が所定距離以下の場合のナビゲーション画面を示す図である。
図4に示すように、制御部24は、サーバ10から合流対象の位置、合流場所、及び誘導経路の情報を受信すると(ステップS31)、自己の位置と合流対象との位置との間の距離が所定距離以下か否か判別する(ステップS32)。ここで、本実施の形態の所定距離は、自己の位置からナビゲーション画面の地図に表示できる範囲までの距離とする。すなわち、制御部24は、ナビゲーション画面の地図の縮尺を変更することなく、当該地図上に合流対象の位置を表示可能であるかを判断する。
【0024】
合流対象との間の距離が所定距離より離れている場合(ステップS32:No)、制御部24は、合流対象が遠距離に存在し、ナビゲーション画面の地図の縮尺のままでは当該地図に合流対象の位置を表示できないと判断し、自己の位置及び合流対象の方向をナビゲーション画面に表示する(ステップS33)。したがって、図5に示すように、ナビゲーション画面40の地図41上には、自己の位置42と、合流対象の方向43と、合流場所44と、誘導経路45とが表示される。このように、合流対象の位置がナビゲーション画面40に表示される地図41の範囲外にあり、合流対象の位置を地図41上に表示できない場合でも、自己の位置42とともに合流対象の方向43を表示できる。
なお、図5において、合流対象の方向43は、自己の位置42から合流対象の位置に向かう矢印として示したが、合流対象の方向43の表示形態はこれに限定されない。また、合流場所44が自己の位置42から所定距離以内に存在せず、ナビゲーション画面40に表示できない場合には、ナビゲーション画面40の地図に表示できる範囲内の誘導経路45が表示される。
【0025】
図4を参照し、制御部24は、合流場所までの誘導経路の案内を開始し(ステップS34)、自車が合流場所に到着したか否か判別する(ステップS35)。
自車が合流場所に到着していない場合(ステップS35:No)、制御部24は、所定時間t毎に、絶対位置・方位検出部21により検出された現在の自車位置の情報(自己位置情報)と合流対象情報とをサーバ10に送信するとともに、サーバ10から現在の合流対象位置情報を受信して更新し(ステップS36)、処理をステップS32に移行する。
【0026】
ステップS32の判別において、合流対象との間の距離が所定距離以内である場合(ステップS32:Yes)、制御部24は、合流対象が近距離に存在し、ナビゲーション画面の地図の縮尺を変更することなく当該地図に合流対象の位置を表示可能であると判断し、自己の位置及び合流対象の位置をナビゲーション画面に表示する(ステップS37)。したがって、図6に示すように、ナビゲーション画面40の地図41には、自己の位置42と、合流対象の位置46と、合流場所44と、自己の位置42から合流場所44までの誘導経路45とが表示される。なお、合流場所44が自己の位置42から所定距離内になく、ナビゲーション画面40の地図に表示できない場合には、ナビゲーション画面40の地図に表示できる範囲内の誘導経路45が表示される。
このように、制御部24は、合流対象との間の距離が所定距離より離れている間に、自己の位置と、合流対象が位置する方向を表示する位置表示モードと、合流対象との間の距離が所定距離以下の間に、自己の位置と、合流対象の位置とを表示する方向表示モードとを切り替える表示切替手段として機能する。
【0027】
そして、制御部24は、既に誘導経路の案内を開始しているので、誘導経路の案内を継続し(ステップS34)、自車が合流場所に到着したか否か判別することとなる(ステップS35)。したがって、制御部24は、自車が合流場所に到着するまで、所定時間t毎に、ステップS32の判定を行い、自己の位置と、合流対象の位置又は合流対象の方向とを更新して表示することとなる。
自車が合流場所に到着すると(ステップS35:Yes)、制御部24は、合流が完了した旨の情報をサーバ10に送信し(ステップS38)、処理を終了する。
【0028】
以上説明したように、本実施の形態によれば、合流対象の位置を取得する取得手段と、合流対象との間の距離が所定距離より離れている間は、自己の位置と、合流対象が位置する方向を表示し、合流対象との間の距離が所定距離以下の間は、自己の位置と、合流対象の位置とを所定時間t毎に更新して表示するように表示部29の表示を切り替える制御部24と、を備える構成とした。この構成により、合流対象との間の距離が所定距離より離れている間は、合流対象の方向を自己の位置とともに表示できる。また、合流対象との間の距離が所定距離以下の間は、移動する合流対象の位置を所定時間t毎に取得でき、移動する合流対象の位置を自己の位置とともに所定時間毎に更新して表示できる。
【0029】
また、本実施の形態によれば、制御部24は、表示部29に表示する地図の範囲外に合流対象が位置する間に、自己の位置と、合流対象が位置する方向を表示する構成とした。この構成により、合流対象の位置が表示部29に表示される地図の範囲外にあり、合流対象の位置を地図上に表示できない場合でも、自己の位置とともに合流対象の方向を表示できる。
【0030】
但し、上記実施の形態は本発明の一態様であり、本発明の趣旨を逸脱しない範囲において適宜変更可能であるのは勿論である。
例えば、上記実施の形態では、合流対象との間の距離が所定距離以内の場合に、相手の方向に代えて相手の位置を表示していたが、相手の方向及び相手の位置の両方を表示してもよい。
【0031】
また、上記実施の形態では、合流対象との間の距離が所定距離より離れている間も、所定時間t毎に、自己の位置及び相手の方向を更新して表示したが、合流対象との間の距離が所定距離より離れている間に相手の方向を更新しなくてもよい。また、相手の方向の更新時間を所定時間tより長くしてもよい。
また、上記実施の形態では、ステップS32の判定の所定距離を自己の位置からナビゲーション画面の地図に表示できる範囲までの距離としたため、ナビゲーション画面40が矩形状に表示される場合には、所定距離は、自己の位置からの合流相手の位置への方向によって異なることとなるが、所定距離は、自己の位置からナビゲーション画面の地図に表示できる範囲までの距離であって、かつ、一定の距離であってもよい。
【0032】
また、上記実施の形態では、2つのナビゲーション装置が合流をする場合について説明したが、合流をするナビゲーション装置は3つ以上であってもよい。
また、上記実施の形態では、ナビゲーション装置として車載型のナビゲーション装置を例示したが、これに限らず、携帯電話やPDA等の携帯型情報機器に組み込まれるナビゲーション装置や、地図表示装置などの情報処理装置にも本発明を適用可能である。
【符号の説明】
【0033】
1 ナビゲーションシステム
10 サーバ
20 ナビゲーション装置
24 制御部(表示切替手段)
29 表示部(表示手段)
32 通信部(取得手段)
【技術分野】
【0001】
本発明は、移動体との合流場所までの経路を案内するナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両に搭載され、移動体から受信した位置情報に基づいて合流場所を設定し、合流場所までの経路を案内するナビゲーション装置が知られている(例えば、特許文献1参照)。このナビゲーション装置では、経路誘導開始時に合流場所までの誘導経路を検索して誘導を開始し、車両が合流場所の周辺に接近すると、移動体から位置情報を再度受信して合流場所を再設定し、誘導経路を再検索して誘導を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−240573号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の構成では、車両が合流場所の周辺に接近したときのみ移動体の位置を受信するため、車両側のナビゲーション装置は移動する移動体の位置を把握できない。また、移動する移動体の位置は表示されていなかった。
本発明は、上述した事情に鑑みてなされたものであり、合流対象である移動体の位置を取得し、かつ、表示可能なナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、移動体との合流場所への経路を表示手段に表示して誘導を行うナビゲーション装置において、前記移動体の位置を取得する取得手段と、前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段と、を備えたことを特徴とする。
【0006】
上記構成において、前記表示切替手段は、前記表示手段に表示する地図の範囲外に前記移動体が位置する間に、自己の位置と、前記移動体が位置する方向を表示してもよい。
【発明の効果】
【0007】
本発明によれば、移動体との間の距離が所定距離より離れている間は、移動体の方向を自己の位置とともに表示できる。また、移動体との間の距離が所定距離以下の間は、移動する移動体の位置を所定時間毎に取得でき、移動する移動体の位置を自己の位置とともに所定時間毎に更新して表示できる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態に係るナビゲーション装置を適用したナビゲーションシステムの機能的構成を示すブロック図である。
【図2】合流処理におけるナビゲーションシステム全体の動作を示すフローチャートである。
【図3】合流処理におけるサーバ内処理を示すフローチャート。
【図4】合流処理におけるナビゲーション装置内処理を示すフローチャート。
【図5】合流対象との間の距離が所定距離より離れている場合のナビゲーション画面を示す図である。
【図6】合流対象との間の距離が所定距離以下の場合のナビゲーション画面を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施の形態について説明する。以下の説明では、ナビゲーション装置として、移動体である自動車に搭載される車載型のナビゲーション装置(いわゆる、カーナビゲーション装置)について例示する。
図1は、実施の形態に係るナビゲーション装置を適用したナビゲーションシステムの機能的構成を示すブロック図である。
ナビゲーションシステム1は、サーバ10と、複数のナビゲーション装置20とを備えて構成され、サーバと10とナビゲーション装置20はインターネット等のネットワーク2を介して相互に通信可能である。
【0010】
サーバ10は、サーバ通信部11と、サーバ制御部12と、サーバ記憶部13とを備えている。サーバ通信部11は、サーバ制御部12の制御の下、合流をしようとする複数のナビゲーション装置20からその位置情報(自己位置情報)と、合流対象を指定するための合流対象情報とを受信し、サーバ制御部12に出力する。サーバ制御部12は、受信した情報に基づいて合流場所を検索して選択し、選択した合流場所までの各ナビゲーション装置20の誘導経路を検索する。上記サーバ通信部11は、サーバ制御部12の制御の下、合流対象の位置、合流場所、及び合流場所までの誘導経路の情報を、当該合流を所望するナビゲーション装置20に送信する。サーバ記憶部13は、サーバ制御部12の制御の下、サーバ通信部11で受信された各ナビゲーション装置20の自己位置情報を記憶する。また、サーバ記憶部13には、合流場所検索を実現するためのプログラムや合流場所までの誘導経路検索を実現するためのプログラム等の各種プログラム、合流場所及び合流場所までの誘導経路を検索する際に使用する地図データや、道路データ、施設データ等の各種のデータが記憶されている。
【0011】
ナビゲーション装置20は、絶対位置・方位検出部21と、相対方位検出部22と、車速検出部23と、制御部24と、ROM25と、DRAM26と、SRAM27と、VRAM28と、表示部(表示手段)29と、入力部30と、記憶部31と、通信部(取得手段)32とを備えている。
絶対位置・方位検出部21は、GPS(Global Positioning System)衛星から送信されているGPS電波を受信するアンテナ(レシーバでも良い)を備え、ナビゲーション装置20が搭載される自動車の現在地、すなわち自車位置の地表における絶対的な位置座標及び方位をGPS電波に基づいて計算し制御部24に出力する。相対方位検出部22は、ジャイロセンサを有し、自車位置の相対的な方位を検出して制御部24に出力する。車速検出部23は、自動車より得られる車速パルスを処理して、自車両の速度を制御部24に出力する。
【0012】
制御部24は、ナビゲーション装置20の各部の制御や、ナビゲーション機能のための処理とった各種の処理を実行するものであり、演算手段としてのCPUや、その他の周辺回路を備えている。ROM25は、制御プログラムやBIOS(Basic Input Output System)、装置起動のためのブートプログラム、ナビゲーション機能を実現するためのプログラムといった各種プログラムを予め格納するものであり、制御部24によりアクセス可能になされている。また、DRAM26は揮発性メモリであり制御部24のワークエリアとして用いられる。また、SRAM27は不揮発性メモリであり、自動車のアクセサリ電源等のメイン電源(図示せず)から電力が供給されると共に、当該メイン電源がオフの間は、電池などの予備電源(図示せず)から電力が供給されて記憶内容を常時保持可能に構成され、バックアップメモリとして機能する。また、VRAM28は、表示部29に表示される画面データが書き込まれるバッファメモリである。
【0013】
表示部29は、制御部24の下、ナビゲーションのための地図や自車位置を示すナビゲーション画面、操作画面等の各種の情報を表示するものであり、例えばLCD(Liquid Crystal Display)やEL(Electro Luminescent)ディスプレイ等のディスプレイ装置を備えている。入力部30は、ユーザの指示操作を受け付け、ナビゲーション装置20に配設される複数の操作子や、表示部29が備えるディスプレイ装置に設けられたタッチパネル(不図示)を備えている。なお、入力部30は、ナビゲーション装置20をリモートコントローラ等により遠隔操作可能に構成されてもよい。
【0014】
記憶部31は、例えばCD−ROMドライブやDVD-ROMドライブ、ハードディスクドライブ、SSD(Solid State Drive)といった記憶装置であり、制御部24の制御の下、ナビゲーションに使用される地図データや、施設の場所を含む施設データ等の各種のデータを記憶する。
通信部32は、制御部24の制御の下、ネットワーク2を介してサーバ10と通信し、自己位置情報及び合流対象情報をサーバ10に送信するとともに、サーバ10から合流対象の位置、合流場所、及び誘導経路の情報を受信する。
【0015】
以上の構成の下、ユーザにより入力部30から目的地が入力されると、制御部24は、絶対位置・方位検出部21により検出された自車位置から目的地までの誘導経路を探索して、所定縮尺の地図と自車位置と誘導経路とを表示部29のナビゲーション画面に表示する。所定縮尺は、誘導経路を示すに最適な縮尺、あるいは、ユーザによって設定された縮尺である。また、自動車の走行中においては、制御部24は、相対方位検出部22及び車速検出部23の検出結果に基づいて自律航法により算出した自車位置を、絶対位置・方位検出部21により検出された自車位置により補正するハイブリッド航法により、高精度に求めた自車位置を地図上に表示して、誘導経路を案内する。
また、ユーザにより入力部30から合流対象を指定する合流対象情報が入力されると、制御部24は合流処理を実行する。なお、以下の説明において、移動体Aに搭載されるナビゲーション装置20にナビゲーション装置20Aと、移動体Bに搭載されるナビゲーション装置20にナビゲーション装置20Bと符号を付して各々を区別する。
【0016】
図2は、合流処理におけるナビゲーションシステム1全体の動作を示すフローチャートである。
まず、各ナビゲーション装置20A,20Bでは、制御部24が、絶対位置・方位検出部21により検出された自車位置の情報(自己位置情報)と、入力された合流対象情報とをサーバ10に送信する(ステップS1)。ここで、合流対象情報は、合流対象となるナビゲーション装置20A,20B又は移動体A,Bを特定する情報であり、例えば、ナビゲーション装置20A,20B又は移動体A,Bのそれぞれに固有に付されたIDである。
【0017】
次いで、サーバ10では、サーバ制御部12が、ナビゲーション装置20A,20Bから受信した情報に基づいて、合流場所と、各ナビゲーション装置20A,20Bから合流場所までの誘導経路とを算出し、各ナビゲーション装置20A,20Bに、合流対象の位置、合流場所、及び誘導経路の情報を配信する(ステップS2)。
そして、ナビゲーション装置20A,20Bでは、制御部24が、サーバ10から受信した情報に基づいて、地図と自車位置と合流対象の位置と誘導経路とを表示部29のナビゲーション画面に表示するとともに、誘導経路の案内を開始する(ステップS3)。
【0018】
図3は、合流処理におけるサーバ内処理を示すフローチャートである。
まず、サーバ制御部12は、ナビゲーション装置20A,20Bから、各々の自己位置情報と、合流対象であるナビゲーション装置20B,20Aを指定する合流対象情報とを受信する(ステップS11)。ここで、サーバ制御部12は、各ナビゲーション装置20A,20Bの自己位置情報をサーバ記憶部13に記憶する。
次いで、サーバ制御部12は、例えば、ナビゲーション装置20Aから受信した合流対象情報(ID)と、ナビゲーション装置20Aを合流対象として指定するナビゲーション装置20Bの情報(ID)を比較し、当該IDが一致するか否か判別する(ステップS12)。
IDが一致しない場合(ステップS12:No)、サーバ制御部12は処理を終了する。
【0019】
IDが一致すると(ステップS12:Yes)、サーバ制御部12は、各ナビゲーション装置20A,20Bの自己位置情報を参照し、一方の移動体A(ナビゲーション装置20A)の位置を出発地とし、他方の移動体B(ナビゲーション装置20B)の位置を目的地として、合流場所を検索する。次いで、サーバ制御部12は、検索した複数の合流場所の候補から1つを選択するとともに、当該合流場所までの各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS13)。このとき、サーバ制御部12は、ナビゲーション装置20A,20Bの周辺もしくは中間地点にある目標物を、道路データや施設のデータ等予め用意されたデータから検索する。目標物の種類は自由であるが、例えばコンビニエンスストアや飲食店のように駐停車スペースがあって交通の妨げにならない場所が望ましい。
そして、サーバ制御部12は、合流場所の複数の候補地について、各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS14)。
【0020】
ステップS13,14と同様に、サーバ制御部12は、他方の移動体B(ナビゲーション装置20B)の位置を出発地とし、一方の移動体A(ナビゲーション装置20A)の位置を目的地として、合流場所を検索して選択するとともに、当該合流場所までの各ナビゲーション装置20A,20Bの誘導経路を検索し(ステップS15)、合流場所の複数の候補地について、各ナビゲーション装置20A,20Bの誘導経路を検索する(ステップS16)。
サーバ制御部12は、ステップS13,14で検索した合流場所及び誘導経路の検索結果と、ステップS15,16で検索した合流場所及び誘導経路の検索結果とを比較し(ステップS17)、ステップS13,14の検索結果と、ステップS15,16の検索結果とが合致するか否か判別する(ステップS18)。
【0021】
検索結果が合致しない場合(ステップS18:No)、サーバ制御部12は、処理をステップS13及びS15に移行し、合流場所及び誘導経路を再度検索する。
検索結果が合致する場合(ステップS18:Yes)、サーバ制御部12は、合致した検索結果から合流場所及び各ナビゲーション装置20A,20Bの誘導経路を決定し(ステップS19)、各ナビゲーション装置20A,20Bに、合流対象の位置、合流場所、及び誘導経路の情報を配信する(ステップS20)。
【0022】
次いで、サーバ10には、所定時間t毎にナビゲーション装置20A,20Bから各々の自己位置情報及び合流対象情報が送信され、サーバ制御部12は、所定時間t毎に、各ナビゲーション装置20A,20Bに合流対象の位置の情報(合流対象位置情報)を配信して更新する(ステップS21)。そして、サーバ制御部12は、ナビゲーション装置20A,20Bから合流が完了した旨の情報を受信したか否か判別する(ステップS22)。
サーバ制御部12は、ナビゲーション装置20A,20Bから合流が完了した旨の情報を受信するまで(ステップS22:No)、ステップS21の処理を繰り返す。ここで、ナビゲーション装置20A,20Bのいずれかから合流が完了した旨の情報を受信すると、サーバ制御部12は、当該情報を送信したナビゲーション装置20への合流対象位置情報の配信を停止する。
全て(両方)のナビゲーション装置20A,20Bから合流が完了した旨の情報を受信すると(ステップS22:Yes)、サーバ制御部12は処理を終了する。
【0023】
図4は、合流処理におけるナビゲーション装置20A,20B内の処理を示すフローチャートである。図5は合流対象との間の距離が所定距離より離れている場合のナビゲーション画面を示す図であり、図6は合流対象との間の距離が所定距離以下の場合のナビゲーション画面を示す図である。
図4に示すように、制御部24は、サーバ10から合流対象の位置、合流場所、及び誘導経路の情報を受信すると(ステップS31)、自己の位置と合流対象との位置との間の距離が所定距離以下か否か判別する(ステップS32)。ここで、本実施の形態の所定距離は、自己の位置からナビゲーション画面の地図に表示できる範囲までの距離とする。すなわち、制御部24は、ナビゲーション画面の地図の縮尺を変更することなく、当該地図上に合流対象の位置を表示可能であるかを判断する。
【0024】
合流対象との間の距離が所定距離より離れている場合(ステップS32:No)、制御部24は、合流対象が遠距離に存在し、ナビゲーション画面の地図の縮尺のままでは当該地図に合流対象の位置を表示できないと判断し、自己の位置及び合流対象の方向をナビゲーション画面に表示する(ステップS33)。したがって、図5に示すように、ナビゲーション画面40の地図41上には、自己の位置42と、合流対象の方向43と、合流場所44と、誘導経路45とが表示される。このように、合流対象の位置がナビゲーション画面40に表示される地図41の範囲外にあり、合流対象の位置を地図41上に表示できない場合でも、自己の位置42とともに合流対象の方向43を表示できる。
なお、図5において、合流対象の方向43は、自己の位置42から合流対象の位置に向かう矢印として示したが、合流対象の方向43の表示形態はこれに限定されない。また、合流場所44が自己の位置42から所定距離以内に存在せず、ナビゲーション画面40に表示できない場合には、ナビゲーション画面40の地図に表示できる範囲内の誘導経路45が表示される。
【0025】
図4を参照し、制御部24は、合流場所までの誘導経路の案内を開始し(ステップS34)、自車が合流場所に到着したか否か判別する(ステップS35)。
自車が合流場所に到着していない場合(ステップS35:No)、制御部24は、所定時間t毎に、絶対位置・方位検出部21により検出された現在の自車位置の情報(自己位置情報)と合流対象情報とをサーバ10に送信するとともに、サーバ10から現在の合流対象位置情報を受信して更新し(ステップS36)、処理をステップS32に移行する。
【0026】
ステップS32の判別において、合流対象との間の距離が所定距離以内である場合(ステップS32:Yes)、制御部24は、合流対象が近距離に存在し、ナビゲーション画面の地図の縮尺を変更することなく当該地図に合流対象の位置を表示可能であると判断し、自己の位置及び合流対象の位置をナビゲーション画面に表示する(ステップS37)。したがって、図6に示すように、ナビゲーション画面40の地図41には、自己の位置42と、合流対象の位置46と、合流場所44と、自己の位置42から合流場所44までの誘導経路45とが表示される。なお、合流場所44が自己の位置42から所定距離内になく、ナビゲーション画面40の地図に表示できない場合には、ナビゲーション画面40の地図に表示できる範囲内の誘導経路45が表示される。
このように、制御部24は、合流対象との間の距離が所定距離より離れている間に、自己の位置と、合流対象が位置する方向を表示する位置表示モードと、合流対象との間の距離が所定距離以下の間に、自己の位置と、合流対象の位置とを表示する方向表示モードとを切り替える表示切替手段として機能する。
【0027】
そして、制御部24は、既に誘導経路の案内を開始しているので、誘導経路の案内を継続し(ステップS34)、自車が合流場所に到着したか否か判別することとなる(ステップS35)。したがって、制御部24は、自車が合流場所に到着するまで、所定時間t毎に、ステップS32の判定を行い、自己の位置と、合流対象の位置又は合流対象の方向とを更新して表示することとなる。
自車が合流場所に到着すると(ステップS35:Yes)、制御部24は、合流が完了した旨の情報をサーバ10に送信し(ステップS38)、処理を終了する。
【0028】
以上説明したように、本実施の形態によれば、合流対象の位置を取得する取得手段と、合流対象との間の距離が所定距離より離れている間は、自己の位置と、合流対象が位置する方向を表示し、合流対象との間の距離が所定距離以下の間は、自己の位置と、合流対象の位置とを所定時間t毎に更新して表示するように表示部29の表示を切り替える制御部24と、を備える構成とした。この構成により、合流対象との間の距離が所定距離より離れている間は、合流対象の方向を自己の位置とともに表示できる。また、合流対象との間の距離が所定距離以下の間は、移動する合流対象の位置を所定時間t毎に取得でき、移動する合流対象の位置を自己の位置とともに所定時間毎に更新して表示できる。
【0029】
また、本実施の形態によれば、制御部24は、表示部29に表示する地図の範囲外に合流対象が位置する間に、自己の位置と、合流対象が位置する方向を表示する構成とした。この構成により、合流対象の位置が表示部29に表示される地図の範囲外にあり、合流対象の位置を地図上に表示できない場合でも、自己の位置とともに合流対象の方向を表示できる。
【0030】
但し、上記実施の形態は本発明の一態様であり、本発明の趣旨を逸脱しない範囲において適宜変更可能であるのは勿論である。
例えば、上記実施の形態では、合流対象との間の距離が所定距離以内の場合に、相手の方向に代えて相手の位置を表示していたが、相手の方向及び相手の位置の両方を表示してもよい。
【0031】
また、上記実施の形態では、合流対象との間の距離が所定距離より離れている間も、所定時間t毎に、自己の位置及び相手の方向を更新して表示したが、合流対象との間の距離が所定距離より離れている間に相手の方向を更新しなくてもよい。また、相手の方向の更新時間を所定時間tより長くしてもよい。
また、上記実施の形態では、ステップS32の判定の所定距離を自己の位置からナビゲーション画面の地図に表示できる範囲までの距離としたため、ナビゲーション画面40が矩形状に表示される場合には、所定距離は、自己の位置からの合流相手の位置への方向によって異なることとなるが、所定距離は、自己の位置からナビゲーション画面の地図に表示できる範囲までの距離であって、かつ、一定の距離であってもよい。
【0032】
また、上記実施の形態では、2つのナビゲーション装置が合流をする場合について説明したが、合流をするナビゲーション装置は3つ以上であってもよい。
また、上記実施の形態では、ナビゲーション装置として車載型のナビゲーション装置を例示したが、これに限らず、携帯電話やPDA等の携帯型情報機器に組み込まれるナビゲーション装置や、地図表示装置などの情報処理装置にも本発明を適用可能である。
【符号の説明】
【0033】
1 ナビゲーションシステム
10 サーバ
20 ナビゲーション装置
24 制御部(表示切替手段)
29 表示部(表示手段)
32 通信部(取得手段)
【特許請求の範囲】
【請求項1】
移動体との合流場所への経路を表示手段に表示して誘導を行うナビゲーション装置において、
前記移動体の位置を取得する取得手段と、
前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記表示切替手段は、前記表示手段に表示する地図の範囲外に前記移動体が位置する間に、自己の位置と、前記移動体が位置する方向を表示することを特徴とする請求項1に記載のナビゲーション装置。
【請求項1】
移動体との合流場所への経路を表示手段に表示して誘導を行うナビゲーション装置において、
前記移動体の位置を取得する取得手段と、
前記移動体との間の距離が所定距離より離れている間は、自己の位置と、前記移動体が位置する方向を表示し、前記移動体との間の距離が所定距離以下の間は、自己の位置と、前記移動体の位置とを所定時間毎に更新して表示するように前記表示手段の表示を切り替える表示切替手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記表示切替手段は、前記表示手段に表示する地図の範囲外に前記移動体が位置する間に、自己の位置と、前記移動体が位置する方向を表示することを特徴とする請求項1に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−173123(P2012−173123A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−35144(P2011−35144)
【出願日】平成23年2月21日(2011.2.21)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月21日(2011.2.21)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]