
ナビゲーション装置
【課題】ナビゲーション装置が有する元の地図データを変更することなく、道路学習機能により検出した新しい道路のデータを地図データとして追加及び利用できるようにする。
【解決手段】自車両が既製の地図データに登録されている既存道路(1)以外の領域を走行した場合、その移動軌跡に基づいて学習道路データを作成する(2)。さらに、その学習道路と接続する既存道路をベースリンクとし、そのベースリンクをコピー及び分割して、学習道路と既存道路との結合状態を補足的に規定する補助リンクデータを作成し(3)、それを学習道路データと共に保存する。補助リンクデータは、対応する学習道路が接続する既存道路の道路データの代替としてナビゲーションに関する処理に用いられることにより、その学習道路と既製の地図データの道路とを論理的に接続し、既製の地図データを部分更新することなく学習道路を含んだ地図の整合性を補完する。
【解決手段】自車両が既製の地図データに登録されている既存道路(1)以外の領域を走行した場合、その移動軌跡に基づいて学習道路データを作成する(2)。さらに、その学習道路と接続する既存道路をベースリンクとし、そのベースリンクをコピー及び分割して、学習道路と既存道路との結合状態を補足的に規定する補助リンクデータを作成し(3)、それを学習道路データと共に保存する。補助リンクデータは、対応する学習道路が接続する既存道路の道路データの代替としてナビゲーションに関する処理に用いられることにより、その学習道路と既製の地図データの道路とを論理的に接続し、既製の地図データを部分更新することなく学習道路を含んだ地図の整合性を補完する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データに基づいて経路案内を行うナビゲーション装置であって、車両の走行経験に基づいて獲得した学習道路データを利用して経路案内を行うものに関する。
【背景技術】
【0002】
従来、ナビゲーション装置で利用される地図データに新しい道路を新規に追加する場合、地図メーカにおいて地図編集ソフトウェアにより道路データを追加編集し、そのデータを基にナビゲーション装置で利用される地図データを全更新又は差分更新することが行われている。しかし、このような工程は、地図メーカ専用の計測車両にて道路データを走行収集し、その後数ヶ月かけて地図データを作成してユーザに頒布するという手順をとる。このように、道路データの走行収集や地図データ作成に相当の時間を要するため、実世界における道路の地物変化に対して既製の地図データの情報鮮度が落ちてしまうという問題があった。
【0003】
そこで、車両等の移動体の移動軌跡に基づき、既製の地図データに登録されていない新たな道路を学習するナビゲーション装置が案出されている(例えば、特許文献1,2)。道路学習機能は、移動体の現在地が地図データ内の既存の道路から離脱した地点から、再び地図データ内の既存の道路へ復帰した地点までの移動軌跡に基づいて、既製の地図データに存在しない新たな道路(学習道路)を作成して記憶することにより、地図データに登録されていない新たな道路を学習する機能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−88733号公報
【特許文献2】特開2006−125883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来のナビゲーション装置では、上述の道路学習機能により新たに検出した未登録道路を既製の地図データのフォーマットと同じフォーマットデータに変換し、これを既存の地図データに追加するといった部分的な地図更新が行われていた。このような部分的な地図更新を前提とする地図データに対して未登録道路を新規に追加する場合、元の地図データから変更が加えられた地図データにおいて道路ネットワークの整合性(consistency)を確保する必要がある。そのために、学習道路データと元の地図データとを編集して1つに統合するオーサリングという処理負荷の重い作業を行う必要があるといった問題がある。
【0006】
このような問題に対し、本発明は、ナビゲーション装置が有する元の地図データを変更することなく、道路学習機能により検出した新しい道路のデータを地図データとして追加及び利用できるようにするための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的と達成するためになされた請求項1に記載の発明は、道路のリンク及びリンク端のノードに関する道路データに基づいて車両に対する経路案内を行うナビゲーション装置に関するものである。そして、本発明のナビゲーション装置は、既製道路データ記憶手段と、学習道路データ記憶手段と、学習道路検出手段と、補助リンクデータ作成手段と、記録手段とを備える。
【0008】
既製道路データ記憶手段は、経路案内に用いられる道路データであって、既製地図の道路に関する道路データを記憶する。学習道路データ記憶手段は、経路案内に用いられる道路データであって、学習道路に関する道路データ、及び、学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを記憶する。
【0009】
学習道路検出手段は、車両の走行位置が既製道路データ記憶手段に既に登録されている既存道路から離脱した地点から、再び既製道路データ記憶手段に登録されている既存道路に復帰した地点までの移動軌跡に基づいて新規の学習道路を検出し、その検出した学習道路のリンクとリンク端のノードに関する道路データを作成する。
【0010】
補助リンクデータ作成手段は、学習道路検出手段により検出された学習道路と接続する既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、接続地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。記録手段は、学習道路検出手段により作成した学習道路の道路データと、その学習道路に対して補助リンクデータ作成手段により作成した補助リンクデータとを、学習道路データ記憶手段に記録する。
【0011】
本発明のナビゲーション装置は、既存の地図にない道路を走行して獲得した学習道路データを記録する際、その学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを作成し、学習道路データと補助リンクデータとを併せて記録する。その際、ナビゲーション装置に元々存在する既製の地図データにおける道路データには、何ら変更が加えられることはない。
【0012】
補助リンクデータは、学習道路が接続する既存道路(すなわち、道路学習をした際の離脱地点や復帰地点がある既存道路)の道路データを基礎に作成されるものであり、その基礎道路データの代替として学習道路と既存道路との結合を規定するものである。これにより、部分的な地図更新を前提としない地図データを利用するナビゲーション装置において、ナビゲーション装置が備える元の地図データを変更することなく、道路学習機能により検出した新しい学習道路データを地図データとして追加及び利用できるようになる。具体的には、ナビゲーション装置が経路案内を行う際、既製道路データ記憶手段に格納された道路データ、及び学習道路データ記憶手段に格納された道路データ及び補助リンクデータをそれぞれ読み出し、補助リンクによって学習道路と既存道路との接続の整合性が取れた1つの地図データとして利用する。
【0013】
なお、道路学習時に作成する補助リンクデータは、その補助ノードや補助リンクが、基礎となる道路データ(基礎道路データ)から引用した属性情報や形状情報を持つようになっているとよい(請求項3,4)。このように構成することで、補助リンクデータを経路案内に用いる際、引用した属性情報や形状情報に基づいて既存地図との整合性の高い経路案内を実施できる。
【0014】
ところで、補助リンクデータの作成態様の1つとして、学習道路が既存道路のリンク端に直接接続している場合、その既存道路を基礎とする補助リンクを作成しないようにすることが考えられる(請求項4)。これは、元の地図データを変更しない道路学習方法において、補助リンクを作成しなくても学習道路と既存道路との接続の整合性をとることができ、補助リンクを作成する必要のない事例である。
【0015】
また、請求項5に記載のように、既存道路における同一のリンクから離脱及び復帰する学習道路を検出した場合、補助リンクの作成手順は次のようにするとよい。まず、既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路からの離脱地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、離脱地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。そして、その作成した補助リンクデータのうち、離脱地点からみて当該既存道路への復帰地点側にある補助リンクデータを基礎にして、当該基礎補助リンクデータのリンクの一端と復帰地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、復帰地点と当該基礎補助リンクデータのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。このように構成することで、1つの既存道路のリンクから学習道路への離脱側及び復帰側の2つの接続地点に対応する補助リンクを作成できる。
【0016】
また、請求項6に記載のように、新たに検出した学習道路が接続する既存道路において、その既存道路の道路データを基礎として作成された、過去に登録済みの学習道路に対応する補助リンクデータが既に存在する場合、補助リンクの作成手順は次のようにするとよい。すなわち、補助リンクデータ作成手段は、学習道路と接続する既存道路において、その既存道路の道路データを基礎として作成された補助リンクデータが既に学習道路データ記憶手段に存在する場合、その既存の補助リンクデータであって学習道路と当該既存道路との接続地点側にある補助リンクデータを基礎にして、当該補助リンクデータのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ第2の補助リンク及びそのリンク端の補助ノード、並びに、接続地点と当該補助リンクデータのリンクの他端とを結ぶ第2の補助リンク及びそのリンク端の補助ノードに関する第2の補助リンクデータを作成する。そして、学習道路の道路データと、その学習道路に対して作成された第2の補助リンクデータとを学習道路データ記憶手段に記録する。このように、新たに補助リンクを作成する際、既に存在する補助リンクを基礎とすることで、新たに作成する補助リンクと既存の補助リンクとの間で接続の整合性を確保できる。
【0017】
また、道路学習機能により新規道路の学習を繰返し重ねていった場合、過去に獲得した学習道路に接続して新設された新たな道路を新規道路として検出する可能性もある。よって、過去に獲得した学習道路に接続する新規道路についても学習対象とすることができるとよい。そこで、請求項7に記載のナビゲーション装置のように構成することが考えられる。すなわち、学習道路検出手段は、更に、学習道路データ記憶手段に既に登録されている学習道路も新規の学習道路の検出対象とし、車両の走行位置が学習道路データ記憶手段に既に登録されている既存の学習道路から離脱あるいは復帰した場合にも、その移動軌跡に基づいて新規の学習道路に関する道路データを作成する。そして、補助リンクデータ作成手段は、学習道路検出手段により検出された学習道路と接続する既存道路が、学習道路データ記憶手段に既存の学習道路に該当する場合、当該既存の学習道路の道路データを基礎とする補助リンクデータを作成する。このように構成することで、過去に獲得した学習道路から更に新しい道路を学習することが可能になり、道路学習機能の実効性が向上する。
【0018】
つぎに、請求項8に記載のナビゲーション装置は、以下の特徴を有する。すなわち、学習道路データ記憶手段が記憶する補助リンクデータは、その補助リンクデータの有効又は無効を個別に定義する属性情報が設定可能に構成されている。そして、学習道路データ記憶手段に記憶されている補助リンクデータに対して、有効又は無効を定義する属性情報を設定する設定手段を更に備える。
【0019】
このように構成することで、例えば、道路学習を蓄積した結果、道路間接続の整合に不要となった学習道路や補助リンクに関するデータを削除してしまう代わりに、データを保存したままで無効設定しておくことで経路案内に利用しないようにできる。そのようにしておくことで、例えば、道路学習によって獲得した学習道路の一部をユーザが手動で削除したことで、削除されずに残った学習道路における道路間接続の整合性を再構築する必要がある場合等、無効設定されていた学習道路や補助リンクに関するデータを有効設定して再利用することで道路間接続の整合性を再構築ことができるようになる。
【図面の簡単な説明】
【0020】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図。
【図2】道路学習におけるメイン処理の手順を示すフローチャート。
【図3】補助リンクの作成方法の概要を示すフローチャート。
【図4】補助リンクデータを作成する処理の手順を示すフローチャート。
【図5】補助リンク作成の事例を模式的に示す説明図。
【図6】補助リンク作成の事例を模式的に示す説明図。
【図7】補助リンク作成の事例を模式的に示す説明図。
【図8】補助リンク作成の事例を模式的に示す説明図。
【図9】更新された地図の事例を模式的に示す説明図。
【図10】更新された地図の事例を模式的に示す説明図。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[ナビゲーション装置1の構成の説明]
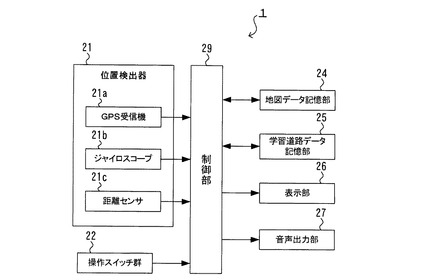
本実施形態のナビゲーション装置1は、車両に搭載されるナビゲーションシステムであり、図1に示すように、車両の現在地を検出するための位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データ記憶部24と、学習道路データ記憶部25と、地図や各種情報の表示を行うための表示部26と、各種ガイド音声を出力するための音声出力部27と、制御部29とを備える。
【0022】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信信号を受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の走行距離を出力する距離センサ21cとを備えている。そして、これらの各センサ21a〜21cからの出力信号に基づいて制御部29が、現在地、方位、速度等を算出する。なお、GPS受信機21aからの出力信号に基づいて現在位置を求める手法には様々な方式があるが、単独測位方式、相対測位方式の何れであってもよい。
【0023】
操作スイッチ群22は、表示部26の表示面上に一体に設置されるタッチパネルや表示部26の周囲に設けられるメカニカルなキースイッチ等で構成されている。
地図データ記憶部24は、地図データ提供者からユーザ向けに提供された既製の地図データを記憶し、その各種データを制御部29に入力するための装置である。地図データ記憶部24に格納されるデータの具体的な内容は、交差点等の特定地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す道路データ、及び地図画像の表示に必要な描画データ等からなる地図データや、いわゆるマップマッチング用のデータ、経路案内用のデータ、意匠画像データ等を含む各種データである。なお、地図データ記憶部24に用いられる記憶媒体としては、CD・DVD−ROM等の光ディスク記憶媒体、あるいは、電気的又は磁気的に記憶内容を書き換え可能な記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。
【0024】
学習データ記憶部25は、道路学習機能により取得した学習道路に関するデータを記憶し、その各種データを制御部29に入力するための装置である。本実施形態のナビゲーション装置1が備える道路学習機能により、既製の地図データに既存の道路又は既に登録済みの学習道路の中には存在しない新たな道路が検出されると、検出した道路に関する学習道路データ及び補助リンクデータが作成され、学習データ記憶部25に記録される。
【0025】
学習道路データは、検出した学習道路のリンク及びそのリンク端のノードに関する属性や形状のデータである。補助リンクデータは、学習道路と既存道路との結合状態を補足的に規定する補助リンクやそのリンク端の補助ノードに関するデータである。この補助リンクデータは、対応する学習道路が接続する既存道路の道路データの代替としてナビゲーションに関する処理に用いられることにより、その学習道路と既製の地図データの道路とを論理的に接続し、既製の地図データを部分更新することなく学習道路を含んだ地図の整合性を補完する役割を持つ。なお、学習データ記憶部25に用いられる記憶媒体としては、電気的又は磁気的に記憶内容を書き換え可能な記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。
【0026】
表示部26は、液晶ディスプレイ等の表示面を有するカラー表示装置であり、制御部29からの映像信号の入力に応じて各種画像を表示可能である。この表示部26は、地図画像の表示や、出発地から目的地までの誘導経路、車両の現在地を示すマーク、その他の案内情報等の表示に用いられる。音声出力部27は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示部26による表示と音声出力部27による音声出力との両方でユーザに対して方向案内等の各種経路案内をすることができる。
【0027】
制御部29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMや地図データ記憶部24、学習道路データ記憶部25等から読み込んだプログラムやデータに基づいて種々の処理を実行する。
【0028】
[動作の概要]
つぎに、制御部29が実行する処理について説明する。
ナビゲーション関係の処理としては、地図表示処理や経路案内処理等が挙げられる。地図表示処理では、まず、位置検出器21からの検出信号に基づいて自車両の現在地を算出する。そして、地図データ記憶部24及び学習道路データ記憶部25から読み込んだ現在地周辺の地図データに基づいて地図画像を生成し、表示部26に現在地周辺の地図画像を表示させる。また、制御部29は、位置検出器21からの検出信号により検出した自車両の現在地を示すマークを、表示部26に表示させる地図画像上に重ね合わせて表示し、自車両の移動に伴って現在地のマークを移動させたり、地図画像をスクロールさせる。
【0029】
また、経路案内処理では、ユーザが操作スイッチ群22を操作して目的地を設定すると、制御部29は車両の現在地を出発地とし、出発地から目的地までの最適経路を地図データ記憶部24及び学習道路データ記憶部25から読み込んだ道路データを用いて探索する。そして、経路探索により得られた最適経路を誘導経路として、その誘導経路を地図画像上に重ね合わせて表示部26に表示させる。そして、制御部29は自車両の移動に伴って所定のタイミングで案内情報を表示又は音声で出力し、自車両が目的地までの誘導経路に沿って走行できるように案内する。
【0030】
さらに、本実施形態のナビゲーション装置1では、自車両が既製の地図データに登録されている既存の道路や、既に登録されている学習道路以外の領域を走行した際、そのときの移動軌跡に基づいて新しい道路に関する学習道路データと補助リンクデータとを作成し、それらを学習道路データ記憶部25に登録する道路学習機能を備える。制御部29は、地図データ記憶部24に既存の道路データ、並びに、学習道路データ記憶部25登録されている学習道路データ及び補助リンクデータをそれぞれ読出し、1つの地図データとして整合性を取るように加工した上で、地図表示処理や経路案内処理に利用する。
【0031】
[道路学習におけるメイン処理の説明]
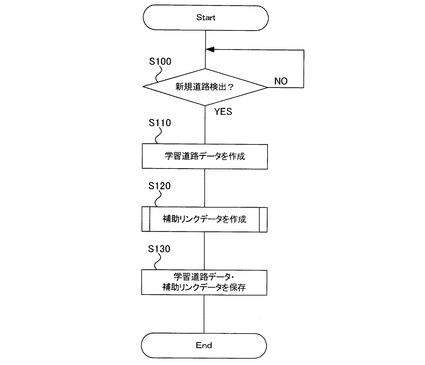
つぎに、制御部29が実行する処理のうち、本発明の特徴的な処理である道路学習におけるメイン処理の手順について、図2のフローチャートを参照しながら説明する。このメイン処理は、自車両の走行中に実行される処理である。
【0032】
制御部29は、本処理を開始すると、地図データ記憶部24及び学習道路データ記憶部25の何れにも存在しない新規道路を検出したか否かを判定する(S100)。ここでは、自車両の走行中において定期的に位置検出器21により現在地を特定し、自車両が既存道路(既製の地図データに既存の道路又は既に登録済みの学習道路)の範囲から離脱した地点から、再び既存道路へ復帰する地点までの移動軌跡を取得することで、新規道路を検出する。
【0033】
新規道路を検出した場合(S100:YES)、既存道路の離脱地点から復帰地点までの移動軌跡に基づいて、学習道路データを生成する(S110)。この学習道路データは、既存道路との接続点(離脱地点、復帰地点)間を接続する学習道路リンクと、その学習道路のリンク端において既存道路との接続点となる学習道路ノードからなる、道路の接続状況を示す情報や、離脱地点と復帰地点との間の道路形状を示す座標点の集合等から構成される。
【0034】
つぎに、S110で作成した学習道路データに対応する補助リンクデータを作成する(S120)。補助リンクデータは、既存道路から離脱した地点のリンクデータ、及び、既存道路に復帰した地点のリンクデータをコピーしたものを基礎に作成する。なお、以降の説明では、補助リンクデータ作成時の基礎となる既存道路のリンクをベースリンクとも称する。
【0035】
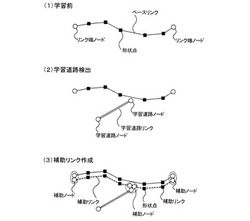
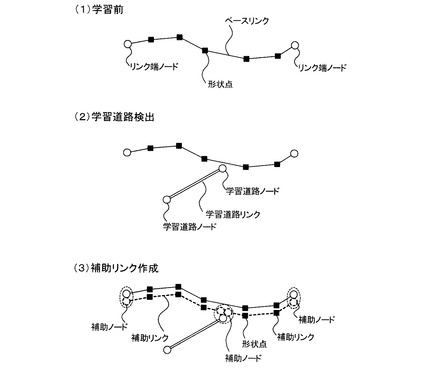
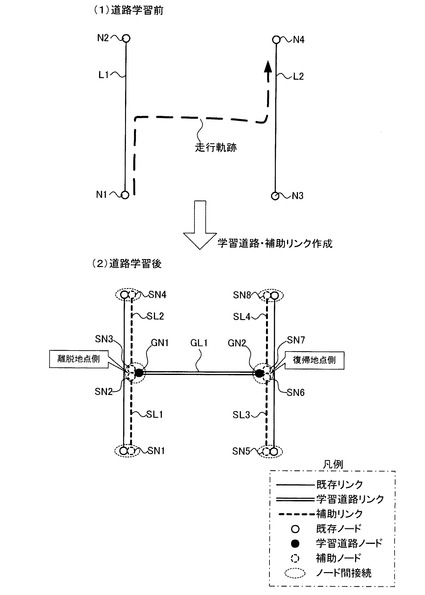
ここで、補助リンクデータの作成方法の概要について図3を参照しながら説明する。図3(1)は、道路学習が行われる前の既存道路のベースリンク及びリンク端のノードを模式的に示すものである。ベースリンクには、道路形状を座標値の集合で示す複数の形状点が含まれている。ベースリンクやリンク端ノードのデータには、その道路の種別や規模、接続先等に関する属性情報が含まれている。
【0036】
図3(2)は、図3(1)のベースリンクの中間に接続する学習道路が検出された状況を模式的に示すものである。新たに学習道路が検出されることで、図3(2)に示すとおり、その走行軌跡に沿った学習道路リンクと、そのリンク端においてベースリンクとの接続地点(離脱地点又は復帰地点)に相当する学習道路ノード及び他端側の学習道路ノードとからなる学習道路データが作成される。
【0037】
学習道路データが作成されると、続いて図3(3)に示すとおり、ベースリンク及びそのリンク端ノードのデータを基礎として、この学習道路リンクに対応する補助リンクデータが作成される。補助リンクデータは、ベースリンク及びそのリンク端ノードのデータをコピーし、そのベースリンクを学習道路リンクとの接続位置(学習道路ノードの位置に相当)で分割して作られる。
【0038】
その結果、図3(3)のように、ベースリンクの一方のリンク端ノードと同一関係にある補助ノード、及び、ベースリンクと学習道路リンクとの接続位置に相当する学習道路ノードと同一関係にある補助ノード、並びに、これらの補助ノード間を接続する補助リンクからなる2組の補助リンクデータが作成される。各補助リンク及び補助ノードは、その基礎となったベースリンク及びそのリンク端ノードの属性情報や形状情報から引用した、同じ内容の属性情報や形状情報を有する。また、各補助ノードは、図中で破線楕円で括ったように同一地点のノードとして同一関係にある他のノード(ベースリンク端ノード、学習道路ノード及び他の補助ノード)との関連付けに関する情報を属性情報として持つ。
【0039】
なお、図3(1)〜(3)で示した補助リンクデータの作成方法は最も基本的な一例であるが、本実施形態では、更に、学習道路と既存道路との接続態様に応じて種々の補助リンクデータの作成方法が用意されている。それらの詳細な内容については後述する。
【0040】
図2のフローチャートの説明に戻る。つぎに、S130では、S110で作成した学習道路データと、S120で作成した補助リンクデータとを共に学習道路データ記憶部25における所定の記憶領域に保存する。保存後、本処理を終了する。
【0041】
[補助リンクデータを作成する処理の説明]
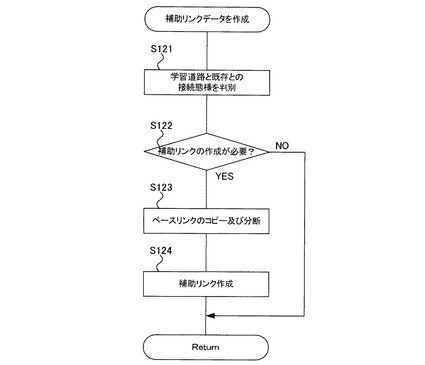
つぎに、制御部29が実行する上述のメイン処理のS120で実行される、補助リンクデータを作成する処理の手順について、図4のフローチャートを参照しながら説明する。
【0042】
制御部29は、本処理を開始すると、先のS110で作成した学習道路データにおける学習道路リンクと、この学習道路が接続する既存道路のリンクとの接続態様を判別する(S121)。具体的には、学習道路のリンク端が既存道路のリンク端に直接接続しているか否か、学習道路のリンクが同一の既存道路のリンクから離脱及び復帰しているか否か、この学習道路が接続する既存道路のリンクをベースリンクにして作成された別の補助リンクが存在するか否か、この学習道路が接続する既存道路が既製の地図データに登録されている道路であるか、あるいは過去の道路学習において登録した学習道路であるか等について判断する。
【0043】
つぎに、S121で判別した結果に応じて、今回検出した学習道路に対応する補助リンクを作成する必要があるか否かを判定する(S122)。S121で判別した結果が補助リンクを作成する必要のあるケースに該当する場合(S122:YES)、S123の処理へ進み、補助リンクの作成が不要のケースに該当する場合(S122:NO)、本処理を終了する。
【0044】
補助リンクを作成する必要のある場合に進むS123では、作成する補助リンクデータの基礎となるベースリンク及びそのリンク端ノードのデータをコピーし、コピーしたベースリンクを学習道路リンクとの接続位置で分断する。そして、S124では、その分断した各ベーリンクリンク及び各既存ノードのコピーとから、補助リンク及びそのリンク端の補助ノードからなる補助リンクデータを作成する。補助リンクデータの作成後、本処理を終了する。
【0045】
つぎに、図5〜8を参照しながら、学習道路と既存道路との接続態様別の補助リンクの具体的な作成事例について説明する。
〈1〉図5は、既製の地図データに登録されている既存道路から離脱し、別の既存道路へ復帰する学習道路に対応する補助リンクデータの作成事例を示す説明図である。ここでは、図5(1)のとおり、走行軌跡が既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中で復帰した事例を想定する。
【0046】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0047】
そして、図5(2)に示すとおり、離脱地点側の既存リンクL1及びそのリンク端の既存ノードN1,N2をベースリンクとし、それらのデータのコピーと、離脱地点側の学習道路ノードGN1のデータとから、補助リンクSL1及びそのリンク端の補助ノードSN1,SN2、並びに、補助リンクL2及びそのリンク端の補助ノードSN3,SN4からなる2組の補助リンクデータを作成する。なお、補助リンクSL1,SL2は、ベースリンクである既存リンクL1を離脱地点の位置で分割したものに相当する。
【0048】
一方、復帰地点側の既存リンクL2及びそのリンク端の既存ノードN3,N4をベースリンクとし、それらのデータのコピーと、復帰地点側の学習道路ノードGN2のデータとから、補助リンクSL3及びそのリンク端の補助ノードSN5,SN6、並びに、補助リンクSL4及びそのリンク端の補助ノードSN7,SN8からなる2組の補助リンクデータを作成する。なお、補助リンクSL3,SL4は、ベースリンクである既存リンクL2を離脱地点の位置で分割したものに相当する。
【0049】
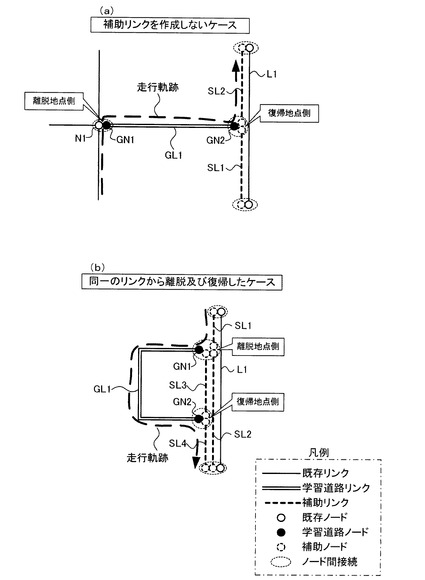
〈2〉つぎに、図6(a)は、既存道路と学習道路との接続箇所に対して補助リンクデータを作成しない事例を示す説明図である。ここでは、走行軌跡が既存ノードN1から直接離脱し、既製の地図データにおける既存リンクL1の途中に復帰した事例を想定する。
【0050】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0051】
この事例では、学習道路リンクGL1は、離脱地点側の端部(学習道路ノードGN1)において既存ノードN1と直接つながっている。この場合、学習道路リンクGL1の離脱地点側に対応する補助リンクデータを作成しない。一方、学習道路リンクGL1の復帰地点側では、復帰地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0052】
〈3〉つぎに、図6(b)は、既製の地図データに登録されている既存リンクから離脱し、その離脱した既存リンクと同一の既存リンクへ再び復帰する学習道路に対応する補助リンクデータの作成事例を示す説明図である。ここでは、走行軌跡が既製の地図データの既存リンクL1の上流側で一端離脱し、同じ既存リンクL1の下流側で再び復帰した事例を想定する。
【0053】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0054】
そして、まず、離脱地点側の補助リンクデータを作成する。その際、既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0055】
つぎに、復帰地点側の補助リンクデータを作成する。その際、既存リンクL1をベースリンクとするのではなく、離脱地点側の2つの補助リンクSL1,SL2のうち、離脱地点からみて復帰地点側にある補助リンクSL2及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0056】
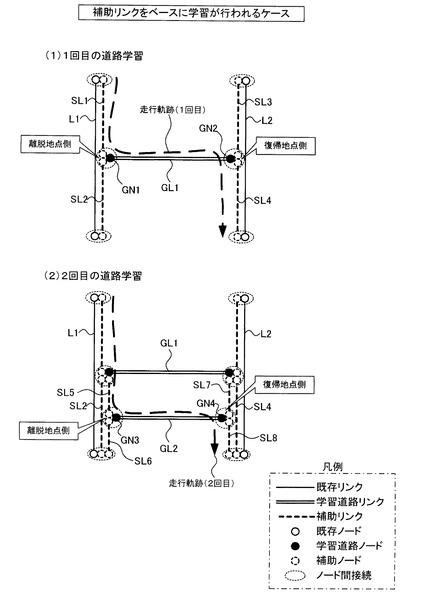
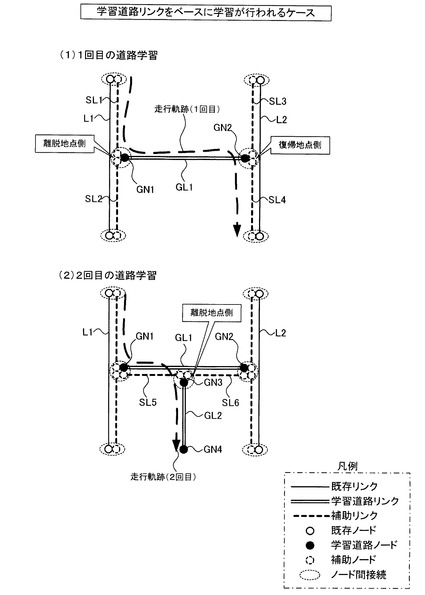
〈4〉つぎに、図7は、同じ既存道路において道路学習が複数回行われた場合の各学習道路に対応する補助リンクデータの作成事例を示す説明図である。
図7(1)は1回目の道路学習の内容を示している。ここでは、まず、既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中で復帰した走行軌跡に基づいて、学習道路リンクGL1及びそのリンク端の学習道路ノードGN1,GN2からなる学習道路データを作成する。
【0057】
そして、離脱地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。また、復帰地点側の既存リンクL2及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0058】
つぎに、図7(2)は2回目の道路学習の内容を示している。2回目の道路学習では、1回目の道路学習で獲得した学習道路よりも下流側にもう一つの学習道路を検出した事例を想定している。ここでは、まず、既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中に復帰した走行軌跡に基づいて、新たな学習道路リンクGL2及びそのリンク端の学習道路ノードGN3,GN4からなる学習道路データを作成する。
【0059】
そして、離脱地点側の補助リンクデータを作成する。その際、既存リンクL1をベースリンクとするのではなく、過去の道路学習において作成された離脱地点側の2つの補助リンクSL1,SL2のうち、2回目の学習道路の離脱地点側にある補助リンクSL2及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL5,SL6及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0060】
また、復帰地点側の補助リンクデータを作成する。その際、既存リンクL2をベースリンクとするのではなく、過去の道路学習において作成された復帰地点側の2つの補助リンクSL3,SL4のうち、2回目の学習道路の復帰地点側にある補助リンクSL4及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL7,SL8及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0061】
〈5〉つぎに、図8は、道路学習によって過去に獲得した学習道路を起点に新たな道路学習を行った場合における、その学習道路に対応する補助リンクデータの作成事例を示す説明図である。
【0062】
図8(1)は1回目の道路学習の内容を示している。この学習内容は、上記〈4〉で既に説明した1回目の学習内容と同様である。ここでは、離脱地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。また、復帰地点側の既存リンクL2及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0063】
つぎに、図8(2)は2回目の道路学習の内容を示している。2回目の道路学習では、1回目の道路学習で獲得した学習道路リンクの途中から離脱するもう一つの学習道路を検出した事例を想定している。ここでは、まず、1回目の道路学習において作成された学習道路リンクGL1の途中から離脱した走行軌跡に基づいて、新たな学習道路リンクGL2及びそのリンク端の学習道路ノードGN3,GN4からなる学習道路データを作成する。
【0064】
そして、離脱地点側の補助リンクデータを作成する。その際、過去の道路学習において作成された学習道路リンクGL1及びそのリンク端の学習道路ノードをベースリンクとし、新たな補助リンクSL5,SL6及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0065】
[学習道路データ及び補助リンクデータにおける有効・無効設定に関する説明]
上述の補助リンクデータの作成方法において、過去に作成した既存の補助リンク又は学習道路をベースリンクにして、新たな学習道路のための補助リンクを作成するケースがある。その場合、同一区間内において、ベースリンクとなった補助リンクや学習道路リンクと、そのベースリンクをコピーして新たに作成された補助リンクとが重複することになる。
【0066】
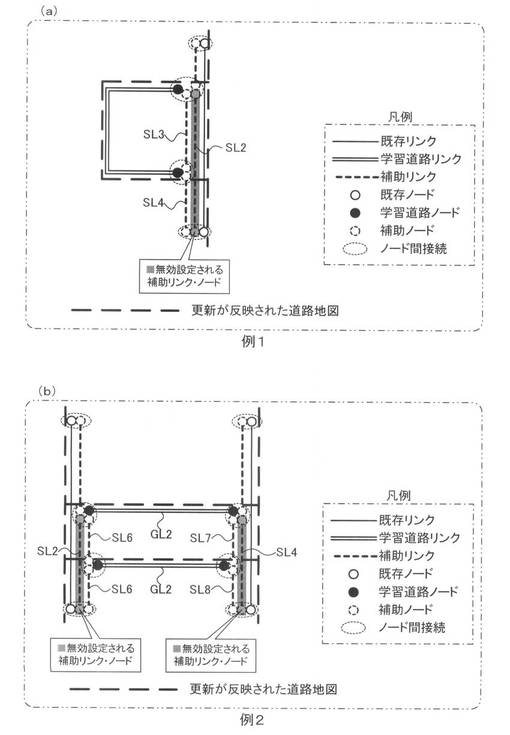
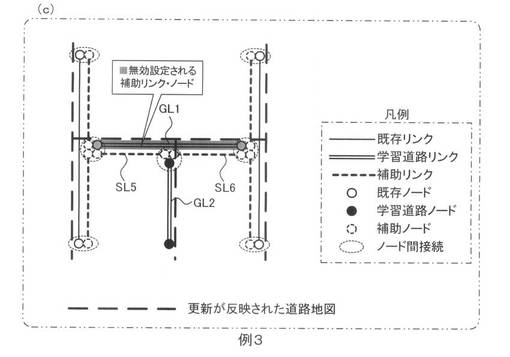
そこで本実施形態では、同一区間で補助リンクや学習道路リンクが重複する場合、不要となる方のリンクデータを、その属性情報において有効設定から無効設定に切替えることで、データを利用不可にする。このようにすることで、不要となる方のリンクデータを消去することなく重複するリンクデータを整理し、地図の道路間の接続における整合性を確保できる。また、無効設定にしたリンクデータは、必要に応じて有効設定に戻すことで再び利用可能にすることができるようになっている。以下、具体例を図9,10を参照しながら説明する。
【0067】
図9(a)は、同一の既存リンクから離脱及び復帰する学習道路を追加した事例である。この事例では、図6(b)において先に説明したとおり、既に作成済みの補助リンクSL2及びそのリンク端の補助ノードをベースリンクにして、補助リンクSL3,SL4及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で補助リンクSL2と、補助リンクSL3,SL4とが重複している。そこで、ベースリンクにした方の補助リンクSL2及びそのリンク端の補助ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0068】
なお、図9(a)の事例においては、例えば、ユーザが道路学習の結果を修正する等して、その学習道路の復帰地点が他の既存リンクに付け替えられた場合、今度は、既存の補助リンクSL3,SL4が不要となる代わりに、それまで無効設定にしていた補助リンクSL2が再び必要となる。その場合、補助リンクSL3,SL4及びそのリンク端の補助ノードを無効設定に切替え、補助リンクSL2及びそのリンク端の補助ノードを無効設定から有効設定に復帰させればよい。
【0069】
つぎに、図9(b)は、同じ既存道路において2回の道路学習によって2つの学習道路を追加した事例である。この事例では、図7において先に説明したとおり、既に作成済みの補助リンクSL2,SL4及びそのリンク端の補助ノードをそれぞれベースリンクにして、補助リンクSL5,SL6,SL7,SL8及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で補助リンクSL2と補助リンクSL5,SL6、並びに、補助リンクSL4と補助リンクSL7,SL8とが重複している。そこで、ベースリンクにした補助リンクSL2,SL4及びそのリンク端の補助ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0070】
なお、図9(b)の事例においては、例えば、ユーザが2回目の道路学習の結果をキャンセルする等して学習道路リンクGL2を不要とした場合、今度は、既存の補助リンクSL5,SL6,SL7,SL8が不要となる。その代わりに、残された学習道路リンクGL1と既存道路との接続の整合性を再構築するため、それまで無効設定にしていた補助リンクSL2,SL4が再び必要となる。その場合、学習道路リンクGL2及びそのリンク端の学習道路ノード、並びに、補助リンクSL5,SL6,SL7,SL8及びそのリンク端の補助ノードを無効設定に切替え、補助リンクSL2,SL4及びそのリンク端の補助ノードを無効設定から有効設定に復帰させればよい。
【0071】
つぎに、図10(c)は、過去に取得した既存の学習道路に接続する新たな学習道路を追加した事例である。この事例では、図8において先に説明したとおり、既に作成済みの学習道路リンクGL1及びそのリンク端の補助ノードをベースリンクにして、補助リンクSL5,SL6及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で学習道路リンクGL1と補助リンクSL5,SL6とが重複している。そこで、ベースリンクにした学習道路リンクGL1及びそのリンク端の学習道路ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0072】
なお、図10(c)の事例においては、例えば、ユーザが2回目の道路学習の結果をキャンセルする等して学習道路リンクGL2を不要とした場合、今度は、既存の補助リンクSL5,SL6が不要となる。その代わりに、残った学習道路リンクGL1と既存道路との接続の整合性を再構築するため、それまで無効設定にしていた学習道路リンクGL1が再び必要となる。その場合、学習道路リンクGL2及びそのリンク端の学習道路ノード、並びに、補助リンクSL5,SL6及びそのリンク端の補助ノードを無効設定に切替え、学習道路リンクGL1及びそのリンク端の学習道路ノードを無効設定から有効設定に復帰させればよい。
【0073】
[効果]
上記実施形態のナビゲーション装置1によれば、下記の効果を奏する。
既製の地図にない道路を走行して獲得した学習道路データを記録する際、その学習道路のリンクと他の既存道路のリンクとを論理的に接続する補助リンクデータを作成し、学習道路データと補助リンクデータとを併せて記録する。その際、ナビゲーション装置1に元々存在する既製の地図データにおける道路データには、何ら変更が加えられることはない。これにより、部分的な地図更新を前提としない地図データを利用するナビゲーション装置1において、ナビゲーション装置1が備える元の地図データを変更することなく、道路学習機能により検出した新しい学習道路データを地図データとして追加及び利用できるようになる。
【0074】
また、学習道路データと共に作成する補助リンクデータが、ベースリンクのデータからコピーした属性情報や形状情報を持つようになっていることで、引用した属性情報や形状情報に基づいて既存地図との整合性の高い経路案内を実施できる。
【0075】
また、補助リンクデータの有効・無効を設定可能に構成したことで、不要となった学習道路や補助リンクに関するデータを削除してしまう代わりに、データを保存したままで経路案内に利用しないようすることができる。そのようにしておくことで、既存道路と補助リンクとの接続の整合性を再構築ことができるようになり、地図の部分的な更新が可能となる。
【0076】
[特許請求の範囲に記載の構成との対応]
実施形態のナビゲーション装置1の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
【0077】
実施形態のナビゲーション装置1の地図データ記憶部24が、特許請求の範囲における既製道路データ記憶手段に相当する。学習道路データ記憶部25が学習道路データ記憶手段に相当する。位置検出器21及び制御部29が、学習道路検出手段に相当する。制御部29が、補助リンクデータ作成手段、記録手段及び設定手段に相当する。
【符号の説明】
【0078】
1…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、22…操作スイッチ群、24…地図データ記憶部、25…学習道路データ記憶部、26…表示部、27…音声出力部、29…制御部。
【技術分野】
【0001】
本発明は、地図データに基づいて経路案内を行うナビゲーション装置であって、車両の走行経験に基づいて獲得した学習道路データを利用して経路案内を行うものに関する。
【背景技術】
【0002】
従来、ナビゲーション装置で利用される地図データに新しい道路を新規に追加する場合、地図メーカにおいて地図編集ソフトウェアにより道路データを追加編集し、そのデータを基にナビゲーション装置で利用される地図データを全更新又は差分更新することが行われている。しかし、このような工程は、地図メーカ専用の計測車両にて道路データを走行収集し、その後数ヶ月かけて地図データを作成してユーザに頒布するという手順をとる。このように、道路データの走行収集や地図データ作成に相当の時間を要するため、実世界における道路の地物変化に対して既製の地図データの情報鮮度が落ちてしまうという問題があった。
【0003】
そこで、車両等の移動体の移動軌跡に基づき、既製の地図データに登録されていない新たな道路を学習するナビゲーション装置が案出されている(例えば、特許文献1,2)。道路学習機能は、移動体の現在地が地図データ内の既存の道路から離脱した地点から、再び地図データ内の既存の道路へ復帰した地点までの移動軌跡に基づいて、既製の地図データに存在しない新たな道路(学習道路)を作成して記憶することにより、地図データに登録されていない新たな道路を学習する機能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−88733号公報
【特許文献2】特開2006−125883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来のナビゲーション装置では、上述の道路学習機能により新たに検出した未登録道路を既製の地図データのフォーマットと同じフォーマットデータに変換し、これを既存の地図データに追加するといった部分的な地図更新が行われていた。このような部分的な地図更新を前提とする地図データに対して未登録道路を新規に追加する場合、元の地図データから変更が加えられた地図データにおいて道路ネットワークの整合性(consistency)を確保する必要がある。そのために、学習道路データと元の地図データとを編集して1つに統合するオーサリングという処理負荷の重い作業を行う必要があるといった問題がある。
【0006】
このような問題に対し、本発明は、ナビゲーション装置が有する元の地図データを変更することなく、道路学習機能により検出した新しい道路のデータを地図データとして追加及び利用できるようにするための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的と達成するためになされた請求項1に記載の発明は、道路のリンク及びリンク端のノードに関する道路データに基づいて車両に対する経路案内を行うナビゲーション装置に関するものである。そして、本発明のナビゲーション装置は、既製道路データ記憶手段と、学習道路データ記憶手段と、学習道路検出手段と、補助リンクデータ作成手段と、記録手段とを備える。
【0008】
既製道路データ記憶手段は、経路案内に用いられる道路データであって、既製地図の道路に関する道路データを記憶する。学習道路データ記憶手段は、経路案内に用いられる道路データであって、学習道路に関する道路データ、及び、学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを記憶する。
【0009】
学習道路検出手段は、車両の走行位置が既製道路データ記憶手段に既に登録されている既存道路から離脱した地点から、再び既製道路データ記憶手段に登録されている既存道路に復帰した地点までの移動軌跡に基づいて新規の学習道路を検出し、その検出した学習道路のリンクとリンク端のノードに関する道路データを作成する。
【0010】
補助リンクデータ作成手段は、学習道路検出手段により検出された学習道路と接続する既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、接続地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。記録手段は、学習道路検出手段により作成した学習道路の道路データと、その学習道路に対して補助リンクデータ作成手段により作成した補助リンクデータとを、学習道路データ記憶手段に記録する。
【0011】
本発明のナビゲーション装置は、既存の地図にない道路を走行して獲得した学習道路データを記録する際、その学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを作成し、学習道路データと補助リンクデータとを併せて記録する。その際、ナビゲーション装置に元々存在する既製の地図データにおける道路データには、何ら変更が加えられることはない。
【0012】
補助リンクデータは、学習道路が接続する既存道路(すなわち、道路学習をした際の離脱地点や復帰地点がある既存道路)の道路データを基礎に作成されるものであり、その基礎道路データの代替として学習道路と既存道路との結合を規定するものである。これにより、部分的な地図更新を前提としない地図データを利用するナビゲーション装置において、ナビゲーション装置が備える元の地図データを変更することなく、道路学習機能により検出した新しい学習道路データを地図データとして追加及び利用できるようになる。具体的には、ナビゲーション装置が経路案内を行う際、既製道路データ記憶手段に格納された道路データ、及び学習道路データ記憶手段に格納された道路データ及び補助リンクデータをそれぞれ読み出し、補助リンクによって学習道路と既存道路との接続の整合性が取れた1つの地図データとして利用する。
【0013】
なお、道路学習時に作成する補助リンクデータは、その補助ノードや補助リンクが、基礎となる道路データ(基礎道路データ)から引用した属性情報や形状情報を持つようになっているとよい(請求項3,4)。このように構成することで、補助リンクデータを経路案内に用いる際、引用した属性情報や形状情報に基づいて既存地図との整合性の高い経路案内を実施できる。
【0014】
ところで、補助リンクデータの作成態様の1つとして、学習道路が既存道路のリンク端に直接接続している場合、その既存道路を基礎とする補助リンクを作成しないようにすることが考えられる(請求項4)。これは、元の地図データを変更しない道路学習方法において、補助リンクを作成しなくても学習道路と既存道路との接続の整合性をとることができ、補助リンクを作成する必要のない事例である。
【0015】
また、請求項5に記載のように、既存道路における同一のリンクから離脱及び復帰する学習道路を検出した場合、補助リンクの作成手順は次のようにするとよい。まず、既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路からの離脱地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、離脱地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。そして、その作成した補助リンクデータのうち、離脱地点からみて当該既存道路への復帰地点側にある補助リンクデータを基礎にして、当該基礎補助リンクデータのリンクの一端と復帰地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、復帰地点と当該基礎補助リンクデータのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する。このように構成することで、1つの既存道路のリンクから学習道路への離脱側及び復帰側の2つの接続地点に対応する補助リンクを作成できる。
【0016】
また、請求項6に記載のように、新たに検出した学習道路が接続する既存道路において、その既存道路の道路データを基礎として作成された、過去に登録済みの学習道路に対応する補助リンクデータが既に存在する場合、補助リンクの作成手順は次のようにするとよい。すなわち、補助リンクデータ作成手段は、学習道路と接続する既存道路において、その既存道路の道路データを基礎として作成された補助リンクデータが既に学習道路データ記憶手段に存在する場合、その既存の補助リンクデータであって学習道路と当該既存道路との接続地点側にある補助リンクデータを基礎にして、当該補助リンクデータのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ第2の補助リンク及びそのリンク端の補助ノード、並びに、接続地点と当該補助リンクデータのリンクの他端とを結ぶ第2の補助リンク及びそのリンク端の補助ノードに関する第2の補助リンクデータを作成する。そして、学習道路の道路データと、その学習道路に対して作成された第2の補助リンクデータとを学習道路データ記憶手段に記録する。このように、新たに補助リンクを作成する際、既に存在する補助リンクを基礎とすることで、新たに作成する補助リンクと既存の補助リンクとの間で接続の整合性を確保できる。
【0017】
また、道路学習機能により新規道路の学習を繰返し重ねていった場合、過去に獲得した学習道路に接続して新設された新たな道路を新規道路として検出する可能性もある。よって、過去に獲得した学習道路に接続する新規道路についても学習対象とすることができるとよい。そこで、請求項7に記載のナビゲーション装置のように構成することが考えられる。すなわち、学習道路検出手段は、更に、学習道路データ記憶手段に既に登録されている学習道路も新規の学習道路の検出対象とし、車両の走行位置が学習道路データ記憶手段に既に登録されている既存の学習道路から離脱あるいは復帰した場合にも、その移動軌跡に基づいて新規の学習道路に関する道路データを作成する。そして、補助リンクデータ作成手段は、学習道路検出手段により検出された学習道路と接続する既存道路が、学習道路データ記憶手段に既存の学習道路に該当する場合、当該既存の学習道路の道路データを基礎とする補助リンクデータを作成する。このように構成することで、過去に獲得した学習道路から更に新しい道路を学習することが可能になり、道路学習機能の実効性が向上する。
【0018】
つぎに、請求項8に記載のナビゲーション装置は、以下の特徴を有する。すなわち、学習道路データ記憶手段が記憶する補助リンクデータは、その補助リンクデータの有効又は無効を個別に定義する属性情報が設定可能に構成されている。そして、学習道路データ記憶手段に記憶されている補助リンクデータに対して、有効又は無効を定義する属性情報を設定する設定手段を更に備える。
【0019】
このように構成することで、例えば、道路学習を蓄積した結果、道路間接続の整合に不要となった学習道路や補助リンクに関するデータを削除してしまう代わりに、データを保存したままで無効設定しておくことで経路案内に利用しないようにできる。そのようにしておくことで、例えば、道路学習によって獲得した学習道路の一部をユーザが手動で削除したことで、削除されずに残った学習道路における道路間接続の整合性を再構築する必要がある場合等、無効設定されていた学習道路や補助リンクに関するデータを有効設定して再利用することで道路間接続の整合性を再構築ことができるようになる。
【図面の簡単な説明】
【0020】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図。
【図2】道路学習におけるメイン処理の手順を示すフローチャート。
【図3】補助リンクの作成方法の概要を示すフローチャート。
【図4】補助リンクデータを作成する処理の手順を示すフローチャート。
【図5】補助リンク作成の事例を模式的に示す説明図。
【図6】補助リンク作成の事例を模式的に示す説明図。
【図7】補助リンク作成の事例を模式的に示す説明図。
【図8】補助リンク作成の事例を模式的に示す説明図。
【図9】更新された地図の事例を模式的に示す説明図。
【図10】更新された地図の事例を模式的に示す説明図。
【発明を実施するための形態】
【0021】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[ナビゲーション装置1の構成の説明]
本実施形態のナビゲーション装置1は、車両に搭載されるナビゲーションシステムであり、図1に示すように、車両の現在地を検出するための位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データ記憶部24と、学習道路データ記憶部25と、地図や各種情報の表示を行うための表示部26と、各種ガイド音声を出力するための音声出力部27と、制御部29とを備える。
【0022】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信信号を受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の走行距離を出力する距離センサ21cとを備えている。そして、これらの各センサ21a〜21cからの出力信号に基づいて制御部29が、現在地、方位、速度等を算出する。なお、GPS受信機21aからの出力信号に基づいて現在位置を求める手法には様々な方式があるが、単独測位方式、相対測位方式の何れであってもよい。
【0023】
操作スイッチ群22は、表示部26の表示面上に一体に設置されるタッチパネルや表示部26の周囲に設けられるメカニカルなキースイッチ等で構成されている。
地図データ記憶部24は、地図データ提供者からユーザ向けに提供された既製の地図データを記憶し、その各種データを制御部29に入力するための装置である。地図データ記憶部24に格納されるデータの具体的な内容は、交差点等の特定地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す道路データ、及び地図画像の表示に必要な描画データ等からなる地図データや、いわゆるマップマッチング用のデータ、経路案内用のデータ、意匠画像データ等を含む各種データである。なお、地図データ記憶部24に用いられる記憶媒体としては、CD・DVD−ROM等の光ディスク記憶媒体、あるいは、電気的又は磁気的に記憶内容を書き換え可能な記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。
【0024】
学習データ記憶部25は、道路学習機能により取得した学習道路に関するデータを記憶し、その各種データを制御部29に入力するための装置である。本実施形態のナビゲーション装置1が備える道路学習機能により、既製の地図データに既存の道路又は既に登録済みの学習道路の中には存在しない新たな道路が検出されると、検出した道路に関する学習道路データ及び補助リンクデータが作成され、学習データ記憶部25に記録される。
【0025】
学習道路データは、検出した学習道路のリンク及びそのリンク端のノードに関する属性や形状のデータである。補助リンクデータは、学習道路と既存道路との結合状態を補足的に規定する補助リンクやそのリンク端の補助ノードに関するデータである。この補助リンクデータは、対応する学習道路が接続する既存道路の道路データの代替としてナビゲーションに関する処理に用いられることにより、その学習道路と既製の地図データの道路とを論理的に接続し、既製の地図データを部分更新することなく学習道路を含んだ地図の整合性を補完する役割を持つ。なお、学習データ記憶部25に用いられる記憶媒体としては、電気的又は磁気的に記憶内容を書き換え可能な記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。
【0026】
表示部26は、液晶ディスプレイ等の表示面を有するカラー表示装置であり、制御部29からの映像信号の入力に応じて各種画像を表示可能である。この表示部26は、地図画像の表示や、出発地から目的地までの誘導経路、車両の現在地を示すマーク、その他の案内情報等の表示に用いられる。音声出力部27は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示部26による表示と音声出力部27による音声出力との両方でユーザに対して方向案内等の各種経路案内をすることができる。
【0027】
制御部29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMや地図データ記憶部24、学習道路データ記憶部25等から読み込んだプログラムやデータに基づいて種々の処理を実行する。
【0028】
[動作の概要]
つぎに、制御部29が実行する処理について説明する。
ナビゲーション関係の処理としては、地図表示処理や経路案内処理等が挙げられる。地図表示処理では、まず、位置検出器21からの検出信号に基づいて自車両の現在地を算出する。そして、地図データ記憶部24及び学習道路データ記憶部25から読み込んだ現在地周辺の地図データに基づいて地図画像を生成し、表示部26に現在地周辺の地図画像を表示させる。また、制御部29は、位置検出器21からの検出信号により検出した自車両の現在地を示すマークを、表示部26に表示させる地図画像上に重ね合わせて表示し、自車両の移動に伴って現在地のマークを移動させたり、地図画像をスクロールさせる。
【0029】
また、経路案内処理では、ユーザが操作スイッチ群22を操作して目的地を設定すると、制御部29は車両の現在地を出発地とし、出発地から目的地までの最適経路を地図データ記憶部24及び学習道路データ記憶部25から読み込んだ道路データを用いて探索する。そして、経路探索により得られた最適経路を誘導経路として、その誘導経路を地図画像上に重ね合わせて表示部26に表示させる。そして、制御部29は自車両の移動に伴って所定のタイミングで案内情報を表示又は音声で出力し、自車両が目的地までの誘導経路に沿って走行できるように案内する。
【0030】
さらに、本実施形態のナビゲーション装置1では、自車両が既製の地図データに登録されている既存の道路や、既に登録されている学習道路以外の領域を走行した際、そのときの移動軌跡に基づいて新しい道路に関する学習道路データと補助リンクデータとを作成し、それらを学習道路データ記憶部25に登録する道路学習機能を備える。制御部29は、地図データ記憶部24に既存の道路データ、並びに、学習道路データ記憶部25登録されている学習道路データ及び補助リンクデータをそれぞれ読出し、1つの地図データとして整合性を取るように加工した上で、地図表示処理や経路案内処理に利用する。
【0031】
[道路学習におけるメイン処理の説明]
つぎに、制御部29が実行する処理のうち、本発明の特徴的な処理である道路学習におけるメイン処理の手順について、図2のフローチャートを参照しながら説明する。このメイン処理は、自車両の走行中に実行される処理である。
【0032】
制御部29は、本処理を開始すると、地図データ記憶部24及び学習道路データ記憶部25の何れにも存在しない新規道路を検出したか否かを判定する(S100)。ここでは、自車両の走行中において定期的に位置検出器21により現在地を特定し、自車両が既存道路(既製の地図データに既存の道路又は既に登録済みの学習道路)の範囲から離脱した地点から、再び既存道路へ復帰する地点までの移動軌跡を取得することで、新規道路を検出する。
【0033】
新規道路を検出した場合(S100:YES)、既存道路の離脱地点から復帰地点までの移動軌跡に基づいて、学習道路データを生成する(S110)。この学習道路データは、既存道路との接続点(離脱地点、復帰地点)間を接続する学習道路リンクと、その学習道路のリンク端において既存道路との接続点となる学習道路ノードからなる、道路の接続状況を示す情報や、離脱地点と復帰地点との間の道路形状を示す座標点の集合等から構成される。
【0034】
つぎに、S110で作成した学習道路データに対応する補助リンクデータを作成する(S120)。補助リンクデータは、既存道路から離脱した地点のリンクデータ、及び、既存道路に復帰した地点のリンクデータをコピーしたものを基礎に作成する。なお、以降の説明では、補助リンクデータ作成時の基礎となる既存道路のリンクをベースリンクとも称する。
【0035】
ここで、補助リンクデータの作成方法の概要について図3を参照しながら説明する。図3(1)は、道路学習が行われる前の既存道路のベースリンク及びリンク端のノードを模式的に示すものである。ベースリンクには、道路形状を座標値の集合で示す複数の形状点が含まれている。ベースリンクやリンク端ノードのデータには、その道路の種別や規模、接続先等に関する属性情報が含まれている。
【0036】
図3(2)は、図3(1)のベースリンクの中間に接続する学習道路が検出された状況を模式的に示すものである。新たに学習道路が検出されることで、図3(2)に示すとおり、その走行軌跡に沿った学習道路リンクと、そのリンク端においてベースリンクとの接続地点(離脱地点又は復帰地点)に相当する学習道路ノード及び他端側の学習道路ノードとからなる学習道路データが作成される。
【0037】
学習道路データが作成されると、続いて図3(3)に示すとおり、ベースリンク及びそのリンク端ノードのデータを基礎として、この学習道路リンクに対応する補助リンクデータが作成される。補助リンクデータは、ベースリンク及びそのリンク端ノードのデータをコピーし、そのベースリンクを学習道路リンクとの接続位置(学習道路ノードの位置に相当)で分割して作られる。
【0038】
その結果、図3(3)のように、ベースリンクの一方のリンク端ノードと同一関係にある補助ノード、及び、ベースリンクと学習道路リンクとの接続位置に相当する学習道路ノードと同一関係にある補助ノード、並びに、これらの補助ノード間を接続する補助リンクからなる2組の補助リンクデータが作成される。各補助リンク及び補助ノードは、その基礎となったベースリンク及びそのリンク端ノードの属性情報や形状情報から引用した、同じ内容の属性情報や形状情報を有する。また、各補助ノードは、図中で破線楕円で括ったように同一地点のノードとして同一関係にある他のノード(ベースリンク端ノード、学習道路ノード及び他の補助ノード)との関連付けに関する情報を属性情報として持つ。
【0039】
なお、図3(1)〜(3)で示した補助リンクデータの作成方法は最も基本的な一例であるが、本実施形態では、更に、学習道路と既存道路との接続態様に応じて種々の補助リンクデータの作成方法が用意されている。それらの詳細な内容については後述する。
【0040】
図2のフローチャートの説明に戻る。つぎに、S130では、S110で作成した学習道路データと、S120で作成した補助リンクデータとを共に学習道路データ記憶部25における所定の記憶領域に保存する。保存後、本処理を終了する。
【0041】
[補助リンクデータを作成する処理の説明]
つぎに、制御部29が実行する上述のメイン処理のS120で実行される、補助リンクデータを作成する処理の手順について、図4のフローチャートを参照しながら説明する。
【0042】
制御部29は、本処理を開始すると、先のS110で作成した学習道路データにおける学習道路リンクと、この学習道路が接続する既存道路のリンクとの接続態様を判別する(S121)。具体的には、学習道路のリンク端が既存道路のリンク端に直接接続しているか否か、学習道路のリンクが同一の既存道路のリンクから離脱及び復帰しているか否か、この学習道路が接続する既存道路のリンクをベースリンクにして作成された別の補助リンクが存在するか否か、この学習道路が接続する既存道路が既製の地図データに登録されている道路であるか、あるいは過去の道路学習において登録した学習道路であるか等について判断する。
【0043】
つぎに、S121で判別した結果に応じて、今回検出した学習道路に対応する補助リンクを作成する必要があるか否かを判定する(S122)。S121で判別した結果が補助リンクを作成する必要のあるケースに該当する場合(S122:YES)、S123の処理へ進み、補助リンクの作成が不要のケースに該当する場合(S122:NO)、本処理を終了する。
【0044】
補助リンクを作成する必要のある場合に進むS123では、作成する補助リンクデータの基礎となるベースリンク及びそのリンク端ノードのデータをコピーし、コピーしたベースリンクを学習道路リンクとの接続位置で分断する。そして、S124では、その分断した各ベーリンクリンク及び各既存ノードのコピーとから、補助リンク及びそのリンク端の補助ノードからなる補助リンクデータを作成する。補助リンクデータの作成後、本処理を終了する。
【0045】
つぎに、図5〜8を参照しながら、学習道路と既存道路との接続態様別の補助リンクの具体的な作成事例について説明する。
〈1〉図5は、既製の地図データに登録されている既存道路から離脱し、別の既存道路へ復帰する学習道路に対応する補助リンクデータの作成事例を示す説明図である。ここでは、図5(1)のとおり、走行軌跡が既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中で復帰した事例を想定する。
【0046】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0047】
そして、図5(2)に示すとおり、離脱地点側の既存リンクL1及びそのリンク端の既存ノードN1,N2をベースリンクとし、それらのデータのコピーと、離脱地点側の学習道路ノードGN1のデータとから、補助リンクSL1及びそのリンク端の補助ノードSN1,SN2、並びに、補助リンクL2及びそのリンク端の補助ノードSN3,SN4からなる2組の補助リンクデータを作成する。なお、補助リンクSL1,SL2は、ベースリンクである既存リンクL1を離脱地点の位置で分割したものに相当する。
【0048】
一方、復帰地点側の既存リンクL2及びそのリンク端の既存ノードN3,N4をベースリンクとし、それらのデータのコピーと、復帰地点側の学習道路ノードGN2のデータとから、補助リンクSL3及びそのリンク端の補助ノードSN5,SN6、並びに、補助リンクSL4及びそのリンク端の補助ノードSN7,SN8からなる2組の補助リンクデータを作成する。なお、補助リンクSL3,SL4は、ベースリンクである既存リンクL2を離脱地点の位置で分割したものに相当する。
【0049】
〈2〉つぎに、図6(a)は、既存道路と学習道路との接続箇所に対して補助リンクデータを作成しない事例を示す説明図である。ここでは、走行軌跡が既存ノードN1から直接離脱し、既製の地図データにおける既存リンクL1の途中に復帰した事例を想定する。
【0050】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0051】
この事例では、学習道路リンクGL1は、離脱地点側の端部(学習道路ノードGN1)において既存ノードN1と直接つながっている。この場合、学習道路リンクGL1の離脱地点側に対応する補助リンクデータを作成しない。一方、学習道路リンクGL1の復帰地点側では、復帰地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0052】
〈3〉つぎに、図6(b)は、既製の地図データに登録されている既存リンクから離脱し、その離脱した既存リンクと同一の既存リンクへ再び復帰する学習道路に対応する補助リンクデータの作成事例を示す説明図である。ここでは、走行軌跡が既製の地図データの既存リンクL1の上流側で一端離脱し、同じ既存リンクL1の下流側で再び復帰した事例を想定する。
【0053】
この走行軌跡に基づいて、学習道路リンクGL1、離脱地点側のリンク端のノードである学習道路ノードGN1、及び、復帰地点側のリンク端のノードである学習道路ノードGN2からなる学習道路データを作成する。
【0054】
そして、まず、離脱地点側の補助リンクデータを作成する。その際、既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0055】
つぎに、復帰地点側の補助リンクデータを作成する。その際、既存リンクL1をベースリンクとするのではなく、離脱地点側の2つの補助リンクSL1,SL2のうち、離脱地点からみて復帰地点側にある補助リンクSL2及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0056】
〈4〉つぎに、図7は、同じ既存道路において道路学習が複数回行われた場合の各学習道路に対応する補助リンクデータの作成事例を示す説明図である。
図7(1)は1回目の道路学習の内容を示している。ここでは、まず、既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中で復帰した走行軌跡に基づいて、学習道路リンクGL1及びそのリンク端の学習道路ノードGN1,GN2からなる学習道路データを作成する。
【0057】
そして、離脱地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。また、復帰地点側の既存リンクL2及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0058】
つぎに、図7(2)は2回目の道路学習の内容を示している。2回目の道路学習では、1回目の道路学習で獲得した学習道路よりも下流側にもう一つの学習道路を検出した事例を想定している。ここでは、まず、既製の地図データの既存リンクL1の途中から離脱し、既製の地図データにおける別の既存リンクL2の途中に復帰した走行軌跡に基づいて、新たな学習道路リンクGL2及びそのリンク端の学習道路ノードGN3,GN4からなる学習道路データを作成する。
【0059】
そして、離脱地点側の補助リンクデータを作成する。その際、既存リンクL1をベースリンクとするのではなく、過去の道路学習において作成された離脱地点側の2つの補助リンクSL1,SL2のうち、2回目の学習道路の離脱地点側にある補助リンクSL2及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL5,SL6及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0060】
また、復帰地点側の補助リンクデータを作成する。その際、既存リンクL2をベースリンクとするのではなく、過去の道路学習において作成された復帰地点側の2つの補助リンクSL3,SL4のうち、2回目の学習道路の復帰地点側にある補助リンクSL4及びそのリンク端の補助ノードをベースリンクとし、復帰点側の補助リンクSL7,SL8及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0061】
〈5〉つぎに、図8は、道路学習によって過去に獲得した学習道路を起点に新たな道路学習を行った場合における、その学習道路に対応する補助リンクデータの作成事例を示す説明図である。
【0062】
図8(1)は1回目の道路学習の内容を示している。この学習内容は、上記〈4〉で既に説明した1回目の学習内容と同様である。ここでは、離脱地点側の既存リンクL1及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL1,SL2及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。また、復帰地点側の既存リンクL2及びそのリンク端の既存ノードをベースリンクとし、通常通り、離脱点側の補助リンクSL3,SL4及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0063】
つぎに、図8(2)は2回目の道路学習の内容を示している。2回目の道路学習では、1回目の道路学習で獲得した学習道路リンクの途中から離脱するもう一つの学習道路を検出した事例を想定している。ここでは、まず、1回目の道路学習において作成された学習道路リンクGL1の途中から離脱した走行軌跡に基づいて、新たな学習道路リンクGL2及びそのリンク端の学習道路ノードGN3,GN4からなる学習道路データを作成する。
【0064】
そして、離脱地点側の補助リンクデータを作成する。その際、過去の道路学習において作成された学習道路リンクGL1及びそのリンク端の学習道路ノードをベースリンクとし、新たな補助リンクSL5,SL6及びそれらのリンク端の補助ノードからなる2組の補助リンクデータを作成する。
【0065】
[学習道路データ及び補助リンクデータにおける有効・無効設定に関する説明]
上述の補助リンクデータの作成方法において、過去に作成した既存の補助リンク又は学習道路をベースリンクにして、新たな学習道路のための補助リンクを作成するケースがある。その場合、同一区間内において、ベースリンクとなった補助リンクや学習道路リンクと、そのベースリンクをコピーして新たに作成された補助リンクとが重複することになる。
【0066】
そこで本実施形態では、同一区間で補助リンクや学習道路リンクが重複する場合、不要となる方のリンクデータを、その属性情報において有効設定から無効設定に切替えることで、データを利用不可にする。このようにすることで、不要となる方のリンクデータを消去することなく重複するリンクデータを整理し、地図の道路間の接続における整合性を確保できる。また、無効設定にしたリンクデータは、必要に応じて有効設定に戻すことで再び利用可能にすることができるようになっている。以下、具体例を図9,10を参照しながら説明する。
【0067】
図9(a)は、同一の既存リンクから離脱及び復帰する学習道路を追加した事例である。この事例では、図6(b)において先に説明したとおり、既に作成済みの補助リンクSL2及びそのリンク端の補助ノードをベースリンクにして、補助リンクSL3,SL4及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で補助リンクSL2と、補助リンクSL3,SL4とが重複している。そこで、ベースリンクにした方の補助リンクSL2及びそのリンク端の補助ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0068】
なお、図9(a)の事例においては、例えば、ユーザが道路学習の結果を修正する等して、その学習道路の復帰地点が他の既存リンクに付け替えられた場合、今度は、既存の補助リンクSL3,SL4が不要となる代わりに、それまで無効設定にしていた補助リンクSL2が再び必要となる。その場合、補助リンクSL3,SL4及びそのリンク端の補助ノードを無効設定に切替え、補助リンクSL2及びそのリンク端の補助ノードを無効設定から有効設定に復帰させればよい。
【0069】
つぎに、図9(b)は、同じ既存道路において2回の道路学習によって2つの学習道路を追加した事例である。この事例では、図7において先に説明したとおり、既に作成済みの補助リンクSL2,SL4及びそのリンク端の補助ノードをそれぞれベースリンクにして、補助リンクSL5,SL6,SL7,SL8及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で補助リンクSL2と補助リンクSL5,SL6、並びに、補助リンクSL4と補助リンクSL7,SL8とが重複している。そこで、ベースリンクにした補助リンクSL2,SL4及びそのリンク端の補助ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0070】
なお、図9(b)の事例においては、例えば、ユーザが2回目の道路学習の結果をキャンセルする等して学習道路リンクGL2を不要とした場合、今度は、既存の補助リンクSL5,SL6,SL7,SL8が不要となる。その代わりに、残された学習道路リンクGL1と既存道路との接続の整合性を再構築するため、それまで無効設定にしていた補助リンクSL2,SL4が再び必要となる。その場合、学習道路リンクGL2及びそのリンク端の学習道路ノード、並びに、補助リンクSL5,SL6,SL7,SL8及びそのリンク端の補助ノードを無効設定に切替え、補助リンクSL2,SL4及びそのリンク端の補助ノードを無効設定から有効設定に復帰させればよい。
【0071】
つぎに、図10(c)は、過去に取得した既存の学習道路に接続する新たな学習道路を追加した事例である。この事例では、図8において先に説明したとおり、既に作成済みの学習道路リンクGL1及びそのリンク端の補助ノードをベースリンクにして、補助リンクSL5,SL6及びそのリンク端の補助ノードが作成されている。そのため、同一の区間内で学習道路リンクGL1と補助リンクSL5,SL6とが重複している。そこで、ベースリンクにした学習道路リンクGL1及びそのリンク端の学習道路ノードをそれらの属性情報によって無効設定にすることで、既存道路と補助リンクとの接続関係を実際の道路地図(図中の破線で示す)と整合させることができる。
【0072】
なお、図10(c)の事例においては、例えば、ユーザが2回目の道路学習の結果をキャンセルする等して学習道路リンクGL2を不要とした場合、今度は、既存の補助リンクSL5,SL6が不要となる。その代わりに、残った学習道路リンクGL1と既存道路との接続の整合性を再構築するため、それまで無効設定にしていた学習道路リンクGL1が再び必要となる。その場合、学習道路リンクGL2及びそのリンク端の学習道路ノード、並びに、補助リンクSL5,SL6及びそのリンク端の補助ノードを無効設定に切替え、学習道路リンクGL1及びそのリンク端の学習道路ノードを無効設定から有効設定に復帰させればよい。
【0073】
[効果]
上記実施形態のナビゲーション装置1によれば、下記の効果を奏する。
既製の地図にない道路を走行して獲得した学習道路データを記録する際、その学習道路のリンクと他の既存道路のリンクとを論理的に接続する補助リンクデータを作成し、学習道路データと補助リンクデータとを併せて記録する。その際、ナビゲーション装置1に元々存在する既製の地図データにおける道路データには、何ら変更が加えられることはない。これにより、部分的な地図更新を前提としない地図データを利用するナビゲーション装置1において、ナビゲーション装置1が備える元の地図データを変更することなく、道路学習機能により検出した新しい学習道路データを地図データとして追加及び利用できるようになる。
【0074】
また、学習道路データと共に作成する補助リンクデータが、ベースリンクのデータからコピーした属性情報や形状情報を持つようになっていることで、引用した属性情報や形状情報に基づいて既存地図との整合性の高い経路案内を実施できる。
【0075】
また、補助リンクデータの有効・無効を設定可能に構成したことで、不要となった学習道路や補助リンクに関するデータを削除してしまう代わりに、データを保存したままで経路案内に利用しないようすることができる。そのようにしておくことで、既存道路と補助リンクとの接続の整合性を再構築ことができるようになり、地図の部分的な更新が可能となる。
【0076】
[特許請求の範囲に記載の構成との対応]
実施形態のナビゲーション装置1の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
【0077】
実施形態のナビゲーション装置1の地図データ記憶部24が、特許請求の範囲における既製道路データ記憶手段に相当する。学習道路データ記憶部25が学習道路データ記憶手段に相当する。位置検出器21及び制御部29が、学習道路検出手段に相当する。制御部29が、補助リンクデータ作成手段、記録手段及び設定手段に相当する。
【符号の説明】
【0078】
1…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、22…操作スイッチ群、24…地図データ記憶部、25…学習道路データ記憶部、26…表示部、27…音声出力部、29…制御部。
【特許請求の範囲】
【請求項1】
道路のリンク及びリンク端のノードに関する道路データに基づいて車両に対する経路案内を行うナビゲーション装置において、
前記経路案内に用いられる道路データであって、既製地図の道路に関する道路データを記憶する既製道路データ記憶手段と、
前記経路案内に用いられる道路データであって、学習道路に関する道路データ、及び、前記学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを記憶する学習道路データ記憶手段と、
前記車両の走行位置が前記既製道路データ記憶手段に既に登録されている既存道路から離脱した地点から、再び前記既製道路データ記憶手段に登録されている既存道路に復帰した地点までの移動軌跡に基づいて新規の学習道路を検出し、その検出した学習道路のリンクとリンク端のノードに関する道路データを作成する学習道路検出手段と、
前記学習道路検出手段により検出された学習道路と接続する前記既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記接続地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する補助リンクデータ作成手段と、
前記学習道路検出手段により作成した学習道路の道路データと、その学習道路に対して補助リンクデータ作成手段により作成した補助リンクデータとを、前記学習道路データ記憶手段に記録する記録手段とを備えること
を特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記補助リンクデータ作成手段が作成する補助リンクデータにおける前記補助ノードは、その基礎となる基礎道路データのリンク端のノードの属性情報から引用した属性情報を有すること
を特徴とするナビゲーション装置。
【請求項3】
請求項1又は請求項2に記載のナビゲーション装置において、
前記補助リンクデータ作成手段が作成する補助リンクデータにおける前記補助リンクは、その基礎となる基礎道路データのリンクの形状情報あるいは属性情報から引用した形状情報あるいは属性情報を有すること
を特徴とするナビゲーション装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路が前記既存道路のリンク端と直接接続している場合、その既存道路を基礎とする補助リンクを作成しないこと
を特徴とするナビゲーション装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路が前記既存道路の同一のリンクから離脱及び復帰する場合、前記既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路からの離脱地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記離脱地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成すると共に、その補助リンクデータのうち、前記離脱地点からみて当該既存道路への復帰地点側に該当の前記補助リンクデータを基礎にして、当該基礎補助リンクデータのリンクの一端と前記復帰地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記復帰地点と当該基礎補助リンクデータのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成すること
を特徴とするナビゲーション装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路と接続する前記既存道路において、その既存道路の道路データを基礎として作成された前記補助リンクデータが既に前記学習道路データ記憶手段に存在する場合、その既存の補助リンクデータであって前記学習道路と当該既存道路との接続地点側にある前記補助リンクデータを基礎にして、当該補助リンクデータのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ第2の補助リンク及びそのリンク端の補助ノード、並びに、前記接続地点と当該補助リンクデータのリンクの他端とを結ぶ第2の補助リンク及びそのリンク端の補助ノードに関する第2の補助リンクデータを作成し、
前記記録手段は、前記学習道路の道路データと、その学習道路に対して作成された第2の補助リンクデータとを前記学習道路データ記憶手段に記録すること
を特徴とするナビゲーション装置。
【請求項7】
請求項1ないし請求項6の何れか1項に記載のナビゲーション装置において、
前記学習道路検出手段は、更に、前記学習道路データ記憶手段に既に登録されている学習道路も新規の学習道路の検出対象とし、前記車両の走行位置が前記学習道路データ記憶手段に既に登録されている既存の学習道路から離脱あるいは復帰した場合にも、その移動軌跡に基づいて新規の学習道路に関する道路データを作成し、
前記補助リンクデータ作成手段は、前記学習道路検出手段により検出された学習道路と接続する既存道路が、前記学習道路データ記憶手段に既存の学習道路に該当する場合、当該既存の学習道路の道路データを基礎とする前記補助リンクデータを作成すること
を特徴とするナビゲーション装置。
【請求項8】
請求項1ないし請求項7の何れか1項に記載のナビゲーション装置において、
前記学習道路データ記憶手段が記憶する学習道路の道路データ及び補助リンクデータは、それぞれのデータの有効又は無効を個別に定義する属性情報が設定可能に構成されており、
前記学習道路データ記憶手段に記憶されている道路データ及び補助リンクデータに対して、有効又は無効を定義する属性情報を設定する設定手段を更に備えること
を特徴とするナビゲーション装置。
【請求項1】
道路のリンク及びリンク端のノードに関する道路データに基づいて車両に対する経路案内を行うナビゲーション装置において、
前記経路案内に用いられる道路データであって、既製地図の道路に関する道路データを記憶する既製道路データ記憶手段と、
前記経路案内に用いられる道路データであって、学習道路に関する道路データ、及び、前記学習道路のリンクと他の既存道路のリンクとを接続する補助リンクデータを記憶する学習道路データ記憶手段と、
前記車両の走行位置が前記既製道路データ記憶手段に既に登録されている既存道路から離脱した地点から、再び前記既製道路データ記憶手段に登録されている既存道路に復帰した地点までの移動軌跡に基づいて新規の学習道路を検出し、その検出した学習道路のリンクとリンク端のノードに関する道路データを作成する学習道路検出手段と、
前記学習道路検出手段により検出された学習道路と接続する前記既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記接続地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成する補助リンクデータ作成手段と、
前記学習道路検出手段により作成した学習道路の道路データと、その学習道路に対して補助リンクデータ作成手段により作成した補助リンクデータとを、前記学習道路データ記憶手段に記録する記録手段とを備えること
を特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記補助リンクデータ作成手段が作成する補助リンクデータにおける前記補助ノードは、その基礎となる基礎道路データのリンク端のノードの属性情報から引用した属性情報を有すること
を特徴とするナビゲーション装置。
【請求項3】
請求項1又は請求項2に記載のナビゲーション装置において、
前記補助リンクデータ作成手段が作成する補助リンクデータにおける前記補助リンクは、その基礎となる基礎道路データのリンクの形状情報あるいは属性情報から引用した形状情報あるいは属性情報を有すること
を特徴とするナビゲーション装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路が前記既存道路のリンク端と直接接続している場合、その既存道路を基礎とする補助リンクを作成しないこと
を特徴とするナビゲーション装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路が前記既存道路の同一のリンクから離脱及び復帰する場合、前記既存道路の道路データを基礎にして、当該基礎道路データのリンクの一端と、当該既存道路からの離脱地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記離脱地点と当該基礎道路データのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成すると共に、その補助リンクデータのうち、前記離脱地点からみて当該既存道路への復帰地点側に該当の前記補助リンクデータを基礎にして、当該基礎補助リンクデータのリンクの一端と前記復帰地点とを結ぶ補助リンク及びその補助リンク端の補助ノード、並びに、前記復帰地点と当該基礎補助リンクデータのリンクの他端とを結ぶ補助リンク及びその補助リンク端の補助ノードに関する補助リンクデータを作成すること
を特徴とするナビゲーション装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載のナビゲーション装置において、
前記補助リンクデータ作成手段は、前記学習道路と接続する前記既存道路において、その既存道路の道路データを基礎として作成された前記補助リンクデータが既に前記学習道路データ記憶手段に存在する場合、その既存の補助リンクデータであって前記学習道路と当該既存道路との接続地点側にある前記補助リンクデータを基礎にして、当該補助リンクデータのリンクの一端と、当該既存道路と学習道路との接続地点とを結ぶ第2の補助リンク及びそのリンク端の補助ノード、並びに、前記接続地点と当該補助リンクデータのリンクの他端とを結ぶ第2の補助リンク及びそのリンク端の補助ノードに関する第2の補助リンクデータを作成し、
前記記録手段は、前記学習道路の道路データと、その学習道路に対して作成された第2の補助リンクデータとを前記学習道路データ記憶手段に記録すること
を特徴とするナビゲーション装置。
【請求項7】
請求項1ないし請求項6の何れか1項に記載のナビゲーション装置において、
前記学習道路検出手段は、更に、前記学習道路データ記憶手段に既に登録されている学習道路も新規の学習道路の検出対象とし、前記車両の走行位置が前記学習道路データ記憶手段に既に登録されている既存の学習道路から離脱あるいは復帰した場合にも、その移動軌跡に基づいて新規の学習道路に関する道路データを作成し、
前記補助リンクデータ作成手段は、前記学習道路検出手段により検出された学習道路と接続する既存道路が、前記学習道路データ記憶手段に既存の学習道路に該当する場合、当該既存の学習道路の道路データを基礎とする前記補助リンクデータを作成すること
を特徴とするナビゲーション装置。
【請求項8】
請求項1ないし請求項7の何れか1項に記載のナビゲーション装置において、
前記学習道路データ記憶手段が記憶する学習道路の道路データ及び補助リンクデータは、それぞれのデータの有効又は無効を個別に定義する属性情報が設定可能に構成されており、
前記学習道路データ記憶手段に記憶されている道路データ及び補助リンクデータに対して、有効又は無効を定義する属性情報を設定する設定手段を更に備えること
を特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−189384(P2012−189384A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−51768(P2011−51768)
【出願日】平成23年3月9日(2011.3.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月9日(2011.3.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]