
ナビゲーション装置
【課題】探索した経路を効率的に確認することができるとともに、経路に関する情報を事前に十分に取得することのできるナビゲーション装置を提供する。
【解決手段】地図情報記憶手段28と、案内情報記憶手段30と、経路探索手段22と、シミュレーション実行手段24と、表示手段38と、案内情報報知手段40とを備えるナビゲーション装置10において、移動体の過去の移動軌跡に係る情報を記憶する移動軌跡情報記憶手段32と、シミュレーションによる移動体の現在位置から次の案内地点までの経路が移動軌跡に一致するか否かを判定する経路判定手段26とを備え、シミュレーション実行手段24は、経路判定手段26が経路を移動軌跡に一致すると判定したとき、移動体の現在位置を次の案内地点までスキップさせ、又は、早送りで更新させる。
【解決手段】地図情報記憶手段28と、案内情報記憶手段30と、経路探索手段22と、シミュレーション実行手段24と、表示手段38と、案内情報報知手段40とを備えるナビゲーション装置10において、移動体の過去の移動軌跡に係る情報を記憶する移動軌跡情報記憶手段32と、シミュレーションによる移動体の現在位置から次の案内地点までの経路が移動軌跡に一致するか否かを判定する経路判定手段26とを備え、シミュレーション実行手段24は、経路判定手段26が経路を移動軌跡に一致すると判定したとき、移動体の現在位置を次の案内地点までスキップさせ、又は、早送りで更新させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に、目的地までの経路を探索して、シミュレーションを行うシミュレーション機能を備えたナビゲーション装置に関する。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)等により現在位置を検出し、その現在位置を示すマーク(現在位置マーク)を道路地図に重畳させて表示し、また、目的地までの経路を探索し、現在位置マークとともに表示することにより、利用者を所望の目的地まで円滑に導くようにしたナビゲーション装置が知られている。
【0003】
通常、この種のナビゲーション装置には、探索した経路を確認するため、経路に沿って現在位置マークを擬似的に移動させ、現在位置マークの擬似的移動に従って地図画像を表示するシミュレーション機能が搭載されている。また、このシミュレーション機能では、経路を含む地図のスクロール表示とともに、通過する交差点情報や観光情報等が現在位置マークの疑似走行位置に応じて案内される。従って、ユーザは、探索した経路のシミュレーションを行うことにより、走行予定の経路を確認できるとともに、事前に経路情報や経路周辺の情報を取得することができる。
【0004】
ところで、このようなシミュレーションを行う際、一定の速度で画像をスクロールすると、例えば、目的地までの走行距離が非常に長い場合には、シミュレーションが終了するまでに長時間を要してしまう。また、経路上に交差点や観光地が殆どないような場所を走行する場合(次に案内情報を報知する地点までの距離が長い場合)、案内情報が報知されない状態が長時間継続することになり、その間の時間が無駄になるおそれがある。
【0005】
そこで、このような不具合を回避するため、下記の特許文献1(特開平9−79862号公報)では、探索した経路上における車両の現在位置から、案内情報を報知する次の案内地点までの距離が基準距離よりも長い場合、経路のスクロール画像を前記案内地点までスキップさせることにより、シミュレーションに要する時間を短縮するようにした経路情報提供装置を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−79862号公報(段落[0045]〜[0050]、図4、図5)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1の場合、スキップした経路がユーザにとって不案内な経路であると、シミュレーションにより経路を事前に確認する、という本来の目的を達成することができなくなってしまう。すなわち、地図画像が突然に見知らぬ場所にスキップするため、スキップ前後の経路の距離感を掴むことができなく、また、次の案内地点までスキップするため、スキップした位置までは道なりに走行すればよいことは分かるが、この間の道路が、例えば、直線道路なのか、蛇行した山道なのか、道路沿いにどのような施設があるのか、といった状況を把握することができない。
【0008】
一方、車両用のナビゲーション装置などにおいては、過去に走行したことのある経路の履歴情報(軌跡情報)を記憶しておき、目的地の設定に利用したり、記憶された経路の情報を再利用したりする機能を有している場合がある。例えば、走行軌跡情報を記憶しておき、その情報を利用できるようにしたナビゲーション装置は、特開2005−249555号公報、特開2006−30108号公報、特開2010−25845号公報等に開示されている。
【0009】
本発明は、上記の問題点を解消することを課題とするものであり、過去の走行軌跡に着目し、シミュレーションの際に該走行軌跡情報を利用することによって、経路を効率的に確認することができるとともに、経路に関する情報を事前に十分に取得することのできるナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
前記課題を解決するために、本願の請求項1にかかる発明は、
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行することを特徴とする。
【0011】
また、本願の請求項2にかかる発明は、請求項1記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行することを特徴とする。
【0012】
また、本願の請求項3にかかる発明は、請求項1又は請求項2記載のナビゲーション装置において、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせることを特徴とする。
【0013】
また、本願の請求項4にかかる発明は、
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行することを特徴とする。
【0014】
また、本願の請求項5にかかる発明は、請求項4記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行することを特徴とする。
【0015】
また、本願の請求項6にかかる発明は、請求項1〜請求項5のいずれかに記載のナビゲーション装置において、前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、地図情報を記憶する地図情報記憶手段と、前記地図情報に基づき目的地までの経路を探索する経路探索手段と、前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行する。
【0017】
このように構成することにより、シミュレーションによる現在位置マークの位置から次の案内地点までの経路を過去に走行したことがある場合、その間の経路を高速でシミュレーションすることにより、探索した経路を効率的に確認することができる。
【0018】
請求項2にかかる発明においては、請求項1にかかる発明において、前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行する。このように構成することにより、ユーザは、過去の走行軌跡に一致する経路をスキップするか、又は、早送りするかして高速でシミュレーションすることができる。
【0019】
請求項3にかかる発明においては、請求項1又は請求項2ナビゲーション装置において、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせる。このように構成することにより、探索した経路を高速でシミュレーションすることができる。
【0020】
請求項4にかかる発明においては、地図情報を記憶する地図情報記憶手段と、前記地図情報に基づき目的地までの経路を探索する経路探索手段と、前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行する。
【0021】
このように構成することにより、シミュレーションによる現在位置マークの位置から次の案内地点までの経路を過去に走行したことがない場合、その間の経路を低速でシミュレーションすることにより、探索した経路を十分に確認することができ、また、ユーザは、道路状況等の必要な情報を十分に認識して経路を確認することができる。
【0022】
請求項5にかかる発明においては、請求項4に記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行する。このように構成することにより、探索した経路を低速でシミュレーションすることができる。
【0023】
請求項6にかかる発明においては、請求項1〜請求項5のいずれかに記載のナビゲーション装置において、前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する。このように構成することにより、案内地点の近くでは、高速シミュレーションされることがないため、案内情報をその前後の地図情報とともに確実に取得することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施例であるナビゲーション装置の構成ブロック図である。
【図2】走行軌跡情報記憶手段に記憶される過去の走行軌跡情報の説明図である。
【図3】ナビゲーション装置によるシミュレーションの処理フローチャートである。
【図4】経路探索手段により探索され、表示手段に表示される経路の説明図である。
【図5】車両の現在位置から案内地点までのスキップ動作の説明図である。
【図6】スキップ又は早送りを選択する表示画面の説明図である。
【発明を実施するための形態】
【0025】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーション装置を例示するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態のナビゲーション装置にも等しく適応し得るものである。
【実施例1】
【0026】
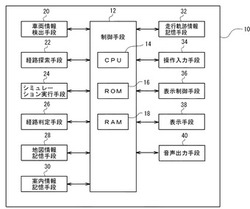
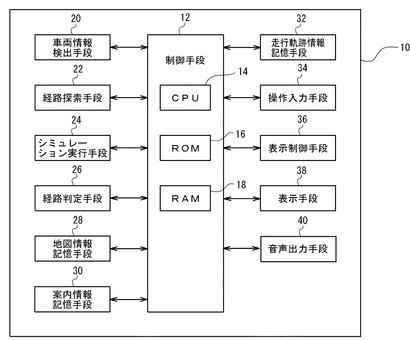
図1は、本発明の一実施例であるナビゲーション装置10の構成ブロック図である。ナビゲーション装置10は、車両に搭載され、車両の出発地又は出発地としての現在位置から目的地までの経路を探索し、ユーザに最適な経路を案内する経路探索機能を備えるとともに、ユーザの移動に先立ち、探索した経路に沿って、現在位置を示す現在位置マークを擬似的に走行させ、その走行状況を表示してシミュレーションを行うシミュレーション機能を備えている。
【0027】
ナビゲーション装置10は、制御手段12を備える。制御手段12は、CPU14、ROM16、RAM18からなるプロセッサで構成され、ROM16、RAM18に記録された制御プログラムに従ってナビゲーション装置10の各部の動作を制御・統括するものである。
【0028】
車両情報検出手段20は、車両の現在位置、速度、進行方向等の車両情報を検出するものである。この場合、現在位置は、例えば、地球上空を周回している3個以上のGPS衛星から時刻情報及び位置情報を含む電波を受信して処理することにより、算出することができる。また、現在位置は、車両情報検出手段20を、距離センサ、速度センサ、方位センサ、舵角センサ等からなる自立航法装置として構成し、算出することもできる。
【0029】
経路探索手段22は、ユーザが設定した出発地、目的地、経由地等の経路探索条件に従い、後述する地図情報記憶手段28に記憶されている地図情報を参照して、最適な経路を探索するものである。経路探索手段22は、出発地または現在位置に対応する道路のノードから、所望の経由地を経由して、目的地に対応するノードに至る間のリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)または総所要時間が最短となる経路を探索する。なお、経路探索手段22は、探索した経路上において右左折などを行なう交差点等の分岐点(案内対象地点)から所定距離だけ手前に案内地点を設定する。そして、車両の移動により現在位置が案内地点に到達する、又は、シミュレーションにより現在位置マークが案内地点に到達すると、案内報知(音声出力手段40による案内情報に基づく音声案内(右左折・直進)や表示手段38による交差点拡大図の表示など)が行なわれる。
【0030】
シミュレーション実行手段24は、経路探索手段22により探索された経路に沿って現在位置マークを擬似的に移動(走行)させるシミュレーションを実行するものであり、現在位置マークの擬似的な移動に応じて地図画像などを後述する表示制御手段36を介して表示手段38に表示する。
【0031】
なお、シミュレーション実行手段24は、所定時間毎に現在位置マークを探索された経路に沿って進ませる距離(速度)を予め決めておき(例えば、経路に沿って1秒間に17m進むとし)、所定時間毎(例えば、1秒毎)に所定時間後(例えば、1秒後)の現在位置マークの位置(例えば、17m進んだ位置)に基づいた(例えば、現在位置マークを中心とした)地図画像を表示するように表示制御手段36に指示を行い、表示制御手段36は、シミュレーション実行手段24の指示に基づく地図画像を表手段38へ表示させる。この現在位置マークの擬似的な移動及び現在位置マークの擬似的な移動に応じた地図画像の表示は(シミュレーションは)、現在位置マークが目的地に到達するまで行なわれる。
【0032】
経路判定手段26は、シミュレーション中における現在位置マークの位置から、経路探索手段22により探索された経路上の次の案内地点までの経路が、ユーザの過去の走行軌跡に一致するか否かを判定するものである。
【0033】
地図情報記憶手段28は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと、地形図データとを含む地図情報を記憶するデータベースである。
【0034】
道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる。道路リンクデータには、始点および終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所、制限速度等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報であり、種別以外にも道路の名称を含んでいてもよい。地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ等が含まれる。
【0035】
案内情報記憶手段30は、交差点等の分岐地点から所定距離だけ手前に設定された案内地点において、右左折、直進、交差点名等の音声ガイダンスを行なうための音声データや交差点等の分岐地点周辺の詳細な地図画像である交差点拡大画像などを含む案内情報、及び、地図情報に関連する案内地点の位置座標などを記憶するデータベースである。
【0036】
また、案内情報には、交差点等の分岐地点に関する情報(右左折、直進の案内や交差点拡大画像)だけでなく、案内地点又は交差点等の分岐地点の近傍にあるガソリンスタンド、駐車場、ショッピングセンタ、美術館などの施設のランドマークや、施設名称、施設位置、施設種別、観光情報(施設の説明情報)等の情報が含まれてもよい。なお、案内情報記憶手段30は、地図情報記憶手段28に含まれても良い。
【0037】
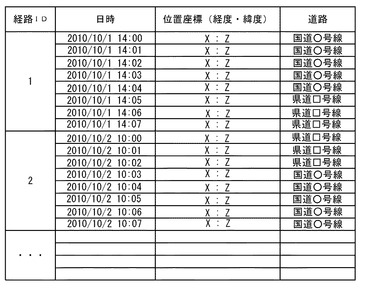
走行軌跡情報記憶手段32は、車両が過去に走行した履歴(走行軌跡)にかかる走行軌跡情報を記憶するものである。図2は、走行軌跡情報記憶手段32に記憶される走行軌跡情報を例示したものである。走行軌跡情報は、経路ID(例えば、経路番号)と、この経路を走行した日時(例えば、位置座標を記憶した日時)と、各日時における現在位置を示す緯度X及び経度Zからなる位置座標と、走行した道路の名称(位置座標などに基づきマップマッチングを行なった道路)とから構成される。これに加え、マップマッチングを行なった道路に属するノードのうち、現在位置に最も近いノードの位置座標やノード番号などを記憶しておいてもよい。また、走行軌跡情報は、ユーザが操作入力手段34を用いて記録指示を行ったときから記録停止の指示(電源オフでもよい)が行われるまでの間の車両情報に基づき生成してもよいし、ナビゲーション装置10の電源がオンされている場合は常に生成してもよい。なお、走行軌跡情報は、車両情報検出手段20により検出された現在位置、地図情報(道路ノードデータ、道路リンクデータ、道路種別データ等)に基づき生成することができる。また、走行軌跡情報は、ナビゲーション装置10が生成せずとも、他の装置が生成した走行軌跡情報を有線/無線通信などの種々の方法で取得し、走行軌跡情報記憶手段32に記憶してもよい。
【0038】
操作入力手段34は、経路探索を行うため、ユーザが出発地、目的地、経由地等の経路探索条件を入力し、また、シミュレーションの実行を指示し、さらに、シミュレーション時において、経路の一部をスキップするか早送りするかを選択するためのものである。経路の一部をスキップするか早送りするかを選択する場合、操作入力手段34は、選択手段として機能する。
【0039】
表示制御手段36は、表示手段38の表示の制御を行う。表示手段38(案内情報報知手段)は、地図情報記憶手段28に記憶された地図情報に基づく地図画像、経路探索手段22により探索された経路、車両の現在位置マーク等を表示するとともに、操作入力手段34による入力作業のための画面を表示するものであり、例えば、液晶パネルによって構成される。なお、表示手段38は、タッチパネルとすることで、操作入力手段34の機能を持たせることもできる。
【0040】
音声出力手段40(案内情報報知手段)は、案内情報記憶手段30から読み出された案内情報に基づく音声ガイダンスや、その他、ナビゲーション装置10の操作に必要な音声、警告等のブザー音等を出力するスピーカである。
【0041】
本発明の実施例にかかるナビゲーション装置10においては、経路のシミュレーションを実行する場合に、走行軌跡情報を利用して過去に走行経験があるかないかを判別し、走行経験がある場合には表示手段38に表示する地図画像をスキップ(現在位置マークの位置をスキップ)し、走行経験がない場合には、地図画像(現在位置マークの位置)のスキップを禁止して早送りまたは通常のシミュレーション時の所定の速度(スクロール速度)で現在位置マークの擬似的な移動を行なうように制御する。これにより、シミュレーションの際に経路を効率的に確認することができるとともに、経路に関する情報を事前に十分に取得することができるようになる。
【0042】
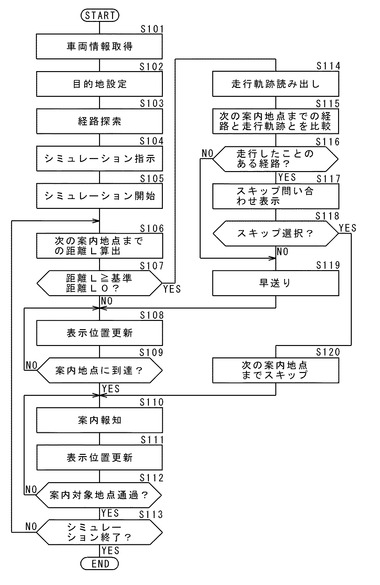
次に、以上のように構成されるナビゲーション装置10を用いた経路探索および探索された経路のシミュレーションの処理手順につき、図3のフローチャートに従って説明する。
【0043】
先ず、車両情報検出手段20が車両情報(現在位置)を検出する(ステップS101)。車両情報検出手段20がGPS受信機である場合には、GPS衛星から受信した電波に含まれる時刻情報及び位置情報に基づいて、車両の現在位置を算出することができる。また、車両情報検出手段20が距離センサ、速度センサ、方位センサ、舵角センサ等からなる自律航法装置である場合には、例えば、基準位置(例えば、GPS受信機により検出された現在位置や、ユーザが設定した位置)と、自律航法装置により検出した距離、速度、走行中の方位、舵角等に基づき、車両の現在位置を算出することができる。
【0044】
次に、ユーザは、操作入力手段34を用いて、目的地を設定するとともに、必要に応じて、所望の出発地及び経由地を設定した後(ステップS102)、経路探索を指示する。
【0045】
経路探索手段22は、設定された出発地、経由地及び目的地の経路探索条件に従い、地図情報記憶手段28に記憶されている地図情報を用いて、経路探索を行う(ステップS103)。なお、経路探索条件は、ステップS101で取得した車両の現在位置を出発地としてもよい。経路は、出発地に対応する道路のノードから目的地に対応する道路のノードに至るまでのリンクをダイクストラ法等の手法によって探索し、時間、距離、費用等のリンクコストのうち、ユーザが希望するリンクコストの累積値が最小となる希望経路として探索することができる。
【0046】
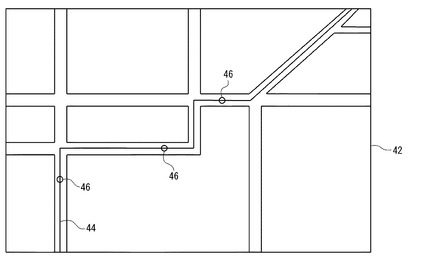
図4は、経路探索手段22により探索され、表示手段38に地図42とともに表示された経路44の一部の説明図である。この場合、探索された経路44には、案内地点46が設定される。現在位置マークが案内地点46に到達すると、案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、案内報知が行われる。なお、案内報知とは、音声出力手段40による案内情報に基づく音声案内(右左折・直進)や表示手段38による交差点拡大図の表示などである。案内地点46は、交差点等の分岐地点や観光地等から所定距離だけ離れた地点(手前の地点)に設定される。経路の情報および案内地点46の案内情報は、案内情報記憶手段30に記憶される。
【0047】
以上のようにして経路44が探索された後、ユーザは、操作入力手段34を用いて、探索された経路44のシミュレーションを指示する(ステップS104)。この指示に従い、シミュレーション実行手段24は、経路44に沿って現在位置マークを疑似的に移動させるシミュレーションを開始する(ステップS105)。
【0048】
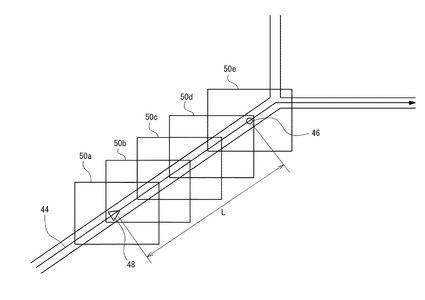
先ず、シミュレーション実行手段24は、図5に示すように、探索された経路44上の車両の仮想上の現在位置である現在位置マーク48の位置から、経路44に沿って経路44上の次の案内地点46までの距離Lを地図情報に基づいて算出する(ステップS106)。そして、算出した距離Lを基準距離L0と比較する(ステップS107)。
【0049】
距離L<基準距離L0であるとき(ステップS107、NO)、すなわち、現在位置マークの位置が案内地点46に近いとき、シミュレーション実行手段24は、表示制御手段36を介して表示手段38に表示する地図画像を、経路44に沿って、地図画像50a〜50eの順に更新する(ステップS108)。すなわち、現在位置マークを所定の速度(例えば、秒速17m)で擬似的に移動させ、現在位置マークの擬似的な移動に伴い、地図画像を更新して表示する(移動する現在位置マークの位置に基づく地図画像を表示する)。
【0050】
表示制御手段36は、シミュレーション実行手段24の指示に基づき地図画像50a〜50eを所定の時間間隔で切り替え、スクロール画像として表示手段38に逐次表示させる。(例えば、秒速17mであれば、1秒ごとに経路44に沿って17m進んだ地図画像が表示される。)なお、現在位置マークの擬似的な走行位置を示す現在位置マーク48は、表示された地図画像上に表示される。また、地図画像50a〜50eを切り替える時間間隔は、ユーザが任意に設定できることが好ましい。(例えば、秒速17mにおいて、1秒毎に地図画像を表示する場合は、17m進んだ位置に基づく地図画像が表示され、0.5秒ごとに地図画像を表示する場合は、8.5m進んだ位置に基づく地図画像が表示される。)
シミュレーションによる現在位置マーク48が案内地点46に到達する(案内地点46を通過する)と(ステップS109、YES)、案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、音声出力手段40及び表示手段38による案内報知が行われる(ステップS110)。
【0051】
ステップS110で案内報知が行われるのと並行して、シミュレーション実行手段24は、継続して経路44に沿って現在位置マーク48を疑似的に移動させ、表示制御手段36は、現在位置マーク48の移動に基づく地図画像を表示手段38に表示させる(ステップS111)。現在位置マーク48が案内地点46で案内される交差点等の案内対象地点を通過し(ステップS112、YES)、シミュレーションがさらに継続されている場合(ステップS113、NO)、ステップS106からの処理が繰り返される。なお、現在位置マーク48が案内地点46で案内される交差点等の案内対象地点を通過するまでは(ステップS112、NO)案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、案内報知が行われる。なお、この際の案内報知は、表示手段38による交差点拡大図の表示のみとしてもよい。
【0052】
一方、探索された経路44上の車両の仮想上の現在位置である現在位置マーク48の位置から、経路44上の次の案内地点46までの距離Lが、距離L≧基準距離L0であるとき(ステップS107、YES)、経路判定手段26は、走行軌跡情報記憶手段32から、車両の過去の走行軌跡にかかる走行軌跡情報を読み出し(ステップS114)、次の案内地点46までの経路44と走行軌跡情報とを比較する(ステップS115)。
【0053】
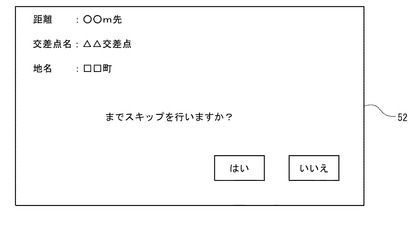
経路判定手段26は、例えば、図2に示す走行軌跡情報に含まれる何れかの位置座標と、次の案内地点46までの経路44に属するノードの全ての位置座標が近い場合や、走行軌跡情報に過去に検出された現在位置の最寄りのノード番号が含まれる場合において、当該ノード番号の何れかと次の案内地点46までの経路44に含まれる全てのノード番号とが一致する場合などに、経路44が過去に走行したことのある経路44であると判定し(ステップS116、YES)、表示制御手段36は、地図画像50a〜50e(現在位置マークの位置)をスキップさせるか否かをユーザに問い合わせる図6の選択画像52を表示手段38に表示させる(ステップS117)。なお、図6の選択画像52には、次の案内地点46又は当該案内地点に対応した交差点等の分岐地点(案内地点から所定距離だけ奥の分岐地点)までの距離、当該案内地点に対応した交差点等の分岐地点の名称(交差点名称)、次の案内地点46又は当該案内地点に対応した交差点等の分岐地点が属する地名(○○県△△市□□町など)が含まれる。これらの情報は地図情報から抽出される。なお、走行軌跡情報の記憶方法や、次の案内地点46までの経路44が過去に走行したことのある経路44であるか否かを判定する方法は、既知の種々の方法を用いてもよい。
【0054】
ユーザが操作入力手段34を用いて選択画像52において「いいえ」を選択した場合(ステップS118、NO)、シミュレーション実行手段24は、地図画像50a〜50e(現在位置マークの擬似的な移動)を早送りで更新する(ステップS119、S108)。この場合、表示手段38には、早送りで地図画像50a〜50eが表示されるため、ユーザが過去に走行したことのある経路44であっても、その経路44を短時間で再確認することができる。なお、早送りは、1つの地図画像を表示する時間を短縮して、すぐに次の地図画像を表示する、或いは、所定時間毎に現在位置マーク48を経路44に沿って進ませる距離を長くする(例えば、1秒間に34m進むとする(秒速34mとする))ことなどを行なうことで実現され、地図画像を表示する時間が同じであれば、例えば、地図画像50a、地図画像50c、地図画像50eの順で表示される。
【0055】
ユーザが操作入力手段34を用いて選択画像52において「はい」を選択した場合(ステップS118、YES)、シミュレーション実行手段24は、現在表示されている地図画像50aを、現在位置マーク46の位置が案内地点46となる地図画像50e(図5参照)までスキップさせ(ステップS120)、表示制御手段36は、地図画像50eを表示手段38に表示させる。言い換えると、シミュレーション実行手段24は、現在位置マーク46を案内地点46まで移動(スキップ)させ、表示制御手段36は、移動した後の現在位置マークの位置に基づく地図画像50eを表示手段38に表示させる。そして、表示手段38及び音声出力手段40が案内地点46に対応する案内情報に基づく案内報知を行う(ステップS110)。この場合、ユーザが過去に走行したことのある経路44がスキップされるため、経路44の必要な部分だけを効率的に確認することができる。なお、このシミュレーション実行手段24によるスキップや早送りなどを高速のシミュレーションとして説明を行なう。
【0056】
一方、次の案内地点46までの経路44と走行軌跡情報とを比較し、経路判定手段26が、過去に走行したことがない経路44であると判定した場合(ステップS116、NO)、表示手段38には、図6に示す選択画像52は表示されず、現在位置マークの位置から次の案内地点46まで早送りでシミュレーションされる(ステップS119、S108)。この場合、ユーザは、次の案内経路46までの距離Lがたとえ長距離であっても、その間は早送りされるため、効率的に経路44を確認することができる。なお、過去に走行したことがない経路44である場合、必ずしも早送りでシミュレーションしなくてもよい。
【0057】
このように、上述した実施例では、次の案内地点46までの経路44が過去に走行したことのある経路44である場合にのみ、次の案内地点46までスキップし、または、早送りする一方、過去に走行したことのない経路44である場合には、スキップしないため、経路44の情報(経路44の道路形状(直線なのか蛇行した道なのか)や、経路44周辺の施設など)を十分に認識しながら効率的に経路44を確認することができる。
【0058】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0059】
例えば、次の案内地点46までの経路44が過去に走行したことのある経路44であるか否かに応じて(ステップS116)、次の案内地点46までスキップさせるか(ステップS120)、次の案内地点46まで早送りさせるか(ステップS119)を切り替える代わりに、次の案内地点46までの経路44が過去に走行したことのある経路44であれば次の案内地点46までスキップさせ、次の案内地点46までの経路44が過去に走行したことのない経路44であれば、スキップ・早送りを行なわず、通常の所定の速度で現在位置マークを擬似的に移動させてもよい。
【0060】
また、次の案内地点46までの経路44が過去に走行したことのある経路44であれば次の案内地点46まで早送りさせ、次の案内地点46までの経路44が過去に走行したことのない経路44であれば、スキップ・早送りを行なわず、通常の所定の速度で現在位置マークを擬似的に移動させてもよい。
【0061】
すなわち、次の案内地点46までの経路44を過去に走行したことがない場合より、走行したことがある場合の方が高速(例えば、早送りやスキップ)のシミュレーションが行われる。
【0062】
さらに、次の案内地点46までの経路44が過去に走行したことのある経路44である場合において(ステップS116、YES)、スキップさせるか否かをユーザに問い合わせる選択画像52を表示させることなく、スキップさせるようにしてもよいし、次の案内地点46までの経路44が過去に走行したことのある経路44である場合にスキップするか否かを予めユーザが操作入力手段38を用いて設定しておき、その設定に基づいてスキップさせるか否かを決定してもよい。
【0063】
ナビゲーション装置10は、車両に搭載されるものに限られず、例えば、ポータブルナビゲーション装置などのように、歩行者が持ち運び可能な装置であってもよい。
【0064】
地図情報記憶手段28は、車両に搭載されるナビゲーション装置10に備えられるものとして説明したが、例えば、通信手段を介してナビゲーション装置10に接続される外部の情報提供サーバから地図情報等を取得する構成とすることもできる。
【0065】
走行軌跡情報記憶手段32に記憶される走行軌跡情報は、車両が走行した経路を特定できるものであればよく、例えば、車両の出発地、経由地、目的地等のデータで構成することもできる。
【0066】
また、次の案内地点までの距離Lが距離L≧基準距離L0である場合にのみ、次の案内地点までの経路44を走行したことがあるか否かを判定したが、これに限らず、距離L<基準距離L0であっても、次の案内地点までの経路44を走行したことがあるか否かを判定し、走行したことがあれば、スキップ或いは早送りをするようにしてもよい。すなわち、次の案内地点までの距離Lが基準距離L0より長いか短いかを判定することは必須ではない。
【0067】
なお、上記実施例においては、次の案内地点46までの経路44を過去に走行したことがある場合(ステップS116、YES)に、走行したことがない場合に比較して高速のシミュレーションを行なう場合を例示したが、これに限ることはなく、例えば、次の案内地点46までの経路44を過去に走行したことがない場合に、走行したことがある場合にくらべ低速のシミュレーションを行なってもよい。すなわち、次の案内地点46までの経路44を過去に走行したことがあれば、通常の所定の速度(例えば、秒速17m)で、現在位置マークを擬似的に移動させ、次の案内地点46までの経路44を過去に走行したことがなければ、低速(例えば、秒速8m)で、現在位置マークを擬似的に移動させてもよい。
【0068】
さらに、ステップS119において、早送りさせた後に再度、距離L≧基準距離L0(ステップS107)の処理を行い、距離L<基準距離L0であれば、早送りを停止させて、所定の速度でのシミュレーションに戻してもよい。これにより、距離L以内では、早送りされることがなく、案内対象地点(交差点など)付近の施設や道路形状などを認識することが可能となる。
【符号の説明】
【0069】
10・・・ナビゲーション装置
12・・・制御手段
20・・・車両情報検出手段
22・・・経路探索手段
24・・・シミュレーション実行手段
26・・・経路判定手段
28・・・地図情報記憶手段
30・・・案内情報記憶手段
32・・・走行軌跡情報記憶手段
34・・・操作入力手段
36・・・表示制御手段
38・・・表示手段
40・・・音声出力手段
42・・・地図
44・・・経路
46・・・案内地点
48・・・現在位置マーク
50a〜50e・・・地図画像
52・・・選択画像
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に、目的地までの経路を探索して、シミュレーションを行うシミュレーション機能を備えたナビゲーション装置に関する。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)等により現在位置を検出し、その現在位置を示すマーク(現在位置マーク)を道路地図に重畳させて表示し、また、目的地までの経路を探索し、現在位置マークとともに表示することにより、利用者を所望の目的地まで円滑に導くようにしたナビゲーション装置が知られている。
【0003】
通常、この種のナビゲーション装置には、探索した経路を確認するため、経路に沿って現在位置マークを擬似的に移動させ、現在位置マークの擬似的移動に従って地図画像を表示するシミュレーション機能が搭載されている。また、このシミュレーション機能では、経路を含む地図のスクロール表示とともに、通過する交差点情報や観光情報等が現在位置マークの疑似走行位置に応じて案内される。従って、ユーザは、探索した経路のシミュレーションを行うことにより、走行予定の経路を確認できるとともに、事前に経路情報や経路周辺の情報を取得することができる。
【0004】
ところで、このようなシミュレーションを行う際、一定の速度で画像をスクロールすると、例えば、目的地までの走行距離が非常に長い場合には、シミュレーションが終了するまでに長時間を要してしまう。また、経路上に交差点や観光地が殆どないような場所を走行する場合(次に案内情報を報知する地点までの距離が長い場合)、案内情報が報知されない状態が長時間継続することになり、その間の時間が無駄になるおそれがある。
【0005】
そこで、このような不具合を回避するため、下記の特許文献1(特開平9−79862号公報)では、探索した経路上における車両の現在位置から、案内情報を報知する次の案内地点までの距離が基準距離よりも長い場合、経路のスクロール画像を前記案内地点までスキップさせることにより、シミュレーションに要する時間を短縮するようにした経路情報提供装置を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平9−79862号公報(段落[0045]〜[0050]、図4、図5)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1の場合、スキップした経路がユーザにとって不案内な経路であると、シミュレーションにより経路を事前に確認する、という本来の目的を達成することができなくなってしまう。すなわち、地図画像が突然に見知らぬ場所にスキップするため、スキップ前後の経路の距離感を掴むことができなく、また、次の案内地点までスキップするため、スキップした位置までは道なりに走行すればよいことは分かるが、この間の道路が、例えば、直線道路なのか、蛇行した山道なのか、道路沿いにどのような施設があるのか、といった状況を把握することができない。
【0008】
一方、車両用のナビゲーション装置などにおいては、過去に走行したことのある経路の履歴情報(軌跡情報)を記憶しておき、目的地の設定に利用したり、記憶された経路の情報を再利用したりする機能を有している場合がある。例えば、走行軌跡情報を記憶しておき、その情報を利用できるようにしたナビゲーション装置は、特開2005−249555号公報、特開2006−30108号公報、特開2010−25845号公報等に開示されている。
【0009】
本発明は、上記の問題点を解消することを課題とするものであり、過去の走行軌跡に着目し、シミュレーションの際に該走行軌跡情報を利用することによって、経路を効率的に確認することができるとともに、経路に関する情報を事前に十分に取得することのできるナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
前記課題を解決するために、本願の請求項1にかかる発明は、
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行することを特徴とする。
【0011】
また、本願の請求項2にかかる発明は、請求項1記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行することを特徴とする。
【0012】
また、本願の請求項3にかかる発明は、請求項1又は請求項2記載のナビゲーション装置において、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせることを特徴とする。
【0013】
また、本願の請求項4にかかる発明は、
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行することを特徴とする。
【0014】
また、本願の請求項5にかかる発明は、請求項4記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行することを特徴とする。
【0015】
また、本願の請求項6にかかる発明は、請求項1〜請求項5のいずれかに記載のナビゲーション装置において、前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、地図情報を記憶する地図情報記憶手段と、前記地図情報に基づき目的地までの経路を探索する経路探索手段と、前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行する。
【0017】
このように構成することにより、シミュレーションによる現在位置マークの位置から次の案内地点までの経路を過去に走行したことがある場合、その間の経路を高速でシミュレーションすることにより、探索した経路を効率的に確認することができる。
【0018】
請求項2にかかる発明においては、請求項1にかかる発明において、前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行する。このように構成することにより、ユーザは、過去の走行軌跡に一致する経路をスキップするか、又は、早送りするかして高速でシミュレーションすることができる。
【0019】
請求項3にかかる発明においては、請求項1又は請求項2ナビゲーション装置において、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせる。このように構成することにより、探索した経路を高速でシミュレーションすることができる。
【0020】
請求項4にかかる発明においては、地図情報を記憶する地図情報記憶手段と、前記地図情報に基づき目的地までの経路を探索する経路探索手段と、前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行する。
【0021】
このように構成することにより、シミュレーションによる現在位置マークの位置から次の案内地点までの経路を過去に走行したことがない場合、その間の経路を低速でシミュレーションすることにより、探索した経路を十分に確認することができ、また、ユーザは、道路状況等の必要な情報を十分に認識して経路を確認することができる。
【0022】
請求項5にかかる発明においては、請求項4に記載のナビゲーション装置において、前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行する。このように構成することにより、探索した経路を低速でシミュレーションすることができる。
【0023】
請求項6にかかる発明においては、請求項1〜請求項5のいずれかに記載のナビゲーション装置において、前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する。このように構成することにより、案内地点の近くでは、高速シミュレーションされることがないため、案内情報をその前後の地図情報とともに確実に取得することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施例であるナビゲーション装置の構成ブロック図である。
【図2】走行軌跡情報記憶手段に記憶される過去の走行軌跡情報の説明図である。
【図3】ナビゲーション装置によるシミュレーションの処理フローチャートである。
【図4】経路探索手段により探索され、表示手段に表示される経路の説明図である。
【図5】車両の現在位置から案内地点までのスキップ動作の説明図である。
【図6】スキップ又は早送りを選択する表示画面の説明図である。
【発明を実施するための形態】
【0025】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するためのナビゲーション装置を例示するものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態のナビゲーション装置にも等しく適応し得るものである。
【実施例1】
【0026】
図1は、本発明の一実施例であるナビゲーション装置10の構成ブロック図である。ナビゲーション装置10は、車両に搭載され、車両の出発地又は出発地としての現在位置から目的地までの経路を探索し、ユーザに最適な経路を案内する経路探索機能を備えるとともに、ユーザの移動に先立ち、探索した経路に沿って、現在位置を示す現在位置マークを擬似的に走行させ、その走行状況を表示してシミュレーションを行うシミュレーション機能を備えている。
【0027】
ナビゲーション装置10は、制御手段12を備える。制御手段12は、CPU14、ROM16、RAM18からなるプロセッサで構成され、ROM16、RAM18に記録された制御プログラムに従ってナビゲーション装置10の各部の動作を制御・統括するものである。
【0028】
車両情報検出手段20は、車両の現在位置、速度、進行方向等の車両情報を検出するものである。この場合、現在位置は、例えば、地球上空を周回している3個以上のGPS衛星から時刻情報及び位置情報を含む電波を受信して処理することにより、算出することができる。また、現在位置は、車両情報検出手段20を、距離センサ、速度センサ、方位センサ、舵角センサ等からなる自立航法装置として構成し、算出することもできる。
【0029】
経路探索手段22は、ユーザが設定した出発地、目的地、経由地等の経路探索条件に従い、後述する地図情報記憶手段28に記憶されている地図情報を参照して、最適な経路を探索するものである。経路探索手段22は、出発地または現在位置に対応する道路のノードから、所望の経由地を経由して、目的地に対応するノードに至る間のリンクをダイクストラ法等の手法によって探索し、リンク長(リンクコスト)や所要時間を累積し、総リンク長(走行距離)または総所要時間が最短となる経路を探索する。なお、経路探索手段22は、探索した経路上において右左折などを行なう交差点等の分岐点(案内対象地点)から所定距離だけ手前に案内地点を設定する。そして、車両の移動により現在位置が案内地点に到達する、又は、シミュレーションにより現在位置マークが案内地点に到達すると、案内報知(音声出力手段40による案内情報に基づく音声案内(右左折・直進)や表示手段38による交差点拡大図の表示など)が行なわれる。
【0030】
シミュレーション実行手段24は、経路探索手段22により探索された経路に沿って現在位置マークを擬似的に移動(走行)させるシミュレーションを実行するものであり、現在位置マークの擬似的な移動に応じて地図画像などを後述する表示制御手段36を介して表示手段38に表示する。
【0031】
なお、シミュレーション実行手段24は、所定時間毎に現在位置マークを探索された経路に沿って進ませる距離(速度)を予め決めておき(例えば、経路に沿って1秒間に17m進むとし)、所定時間毎(例えば、1秒毎)に所定時間後(例えば、1秒後)の現在位置マークの位置(例えば、17m進んだ位置)に基づいた(例えば、現在位置マークを中心とした)地図画像を表示するように表示制御手段36に指示を行い、表示制御手段36は、シミュレーション実行手段24の指示に基づく地図画像を表手段38へ表示させる。この現在位置マークの擬似的な移動及び現在位置マークの擬似的な移動に応じた地図画像の表示は(シミュレーションは)、現在位置マークが目的地に到達するまで行なわれる。
【0032】
経路判定手段26は、シミュレーション中における現在位置マークの位置から、経路探索手段22により探索された経路上の次の案内地点までの経路が、ユーザの過去の走行軌跡に一致するか否かを判定するものである。
【0033】
地図情報記憶手段28は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと、地形図データとを含む地図情報を記憶するデータベースである。
【0034】
道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる。道路リンクデータには、始点および終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所、制限速度等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報であり、種別以外にも道路の名称を含んでいてもよい。地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ等が含まれる。
【0035】
案内情報記憶手段30は、交差点等の分岐地点から所定距離だけ手前に設定された案内地点において、右左折、直進、交差点名等の音声ガイダンスを行なうための音声データや交差点等の分岐地点周辺の詳細な地図画像である交差点拡大画像などを含む案内情報、及び、地図情報に関連する案内地点の位置座標などを記憶するデータベースである。
【0036】
また、案内情報には、交差点等の分岐地点に関する情報(右左折、直進の案内や交差点拡大画像)だけでなく、案内地点又は交差点等の分岐地点の近傍にあるガソリンスタンド、駐車場、ショッピングセンタ、美術館などの施設のランドマークや、施設名称、施設位置、施設種別、観光情報(施設の説明情報)等の情報が含まれてもよい。なお、案内情報記憶手段30は、地図情報記憶手段28に含まれても良い。
【0037】
走行軌跡情報記憶手段32は、車両が過去に走行した履歴(走行軌跡)にかかる走行軌跡情報を記憶するものである。図2は、走行軌跡情報記憶手段32に記憶される走行軌跡情報を例示したものである。走行軌跡情報は、経路ID(例えば、経路番号)と、この経路を走行した日時(例えば、位置座標を記憶した日時)と、各日時における現在位置を示す緯度X及び経度Zからなる位置座標と、走行した道路の名称(位置座標などに基づきマップマッチングを行なった道路)とから構成される。これに加え、マップマッチングを行なった道路に属するノードのうち、現在位置に最も近いノードの位置座標やノード番号などを記憶しておいてもよい。また、走行軌跡情報は、ユーザが操作入力手段34を用いて記録指示を行ったときから記録停止の指示(電源オフでもよい)が行われるまでの間の車両情報に基づき生成してもよいし、ナビゲーション装置10の電源がオンされている場合は常に生成してもよい。なお、走行軌跡情報は、車両情報検出手段20により検出された現在位置、地図情報(道路ノードデータ、道路リンクデータ、道路種別データ等)に基づき生成することができる。また、走行軌跡情報は、ナビゲーション装置10が生成せずとも、他の装置が生成した走行軌跡情報を有線/無線通信などの種々の方法で取得し、走行軌跡情報記憶手段32に記憶してもよい。
【0038】
操作入力手段34は、経路探索を行うため、ユーザが出発地、目的地、経由地等の経路探索条件を入力し、また、シミュレーションの実行を指示し、さらに、シミュレーション時において、経路の一部をスキップするか早送りするかを選択するためのものである。経路の一部をスキップするか早送りするかを選択する場合、操作入力手段34は、選択手段として機能する。
【0039】
表示制御手段36は、表示手段38の表示の制御を行う。表示手段38(案内情報報知手段)は、地図情報記憶手段28に記憶された地図情報に基づく地図画像、経路探索手段22により探索された経路、車両の現在位置マーク等を表示するとともに、操作入力手段34による入力作業のための画面を表示するものであり、例えば、液晶パネルによって構成される。なお、表示手段38は、タッチパネルとすることで、操作入力手段34の機能を持たせることもできる。
【0040】
音声出力手段40(案内情報報知手段)は、案内情報記憶手段30から読み出された案内情報に基づく音声ガイダンスや、その他、ナビゲーション装置10の操作に必要な音声、警告等のブザー音等を出力するスピーカである。
【0041】
本発明の実施例にかかるナビゲーション装置10においては、経路のシミュレーションを実行する場合に、走行軌跡情報を利用して過去に走行経験があるかないかを判別し、走行経験がある場合には表示手段38に表示する地図画像をスキップ(現在位置マークの位置をスキップ)し、走行経験がない場合には、地図画像(現在位置マークの位置)のスキップを禁止して早送りまたは通常のシミュレーション時の所定の速度(スクロール速度)で現在位置マークの擬似的な移動を行なうように制御する。これにより、シミュレーションの際に経路を効率的に確認することができるとともに、経路に関する情報を事前に十分に取得することができるようになる。
【0042】
次に、以上のように構成されるナビゲーション装置10を用いた経路探索および探索された経路のシミュレーションの処理手順につき、図3のフローチャートに従って説明する。
【0043】
先ず、車両情報検出手段20が車両情報(現在位置)を検出する(ステップS101)。車両情報検出手段20がGPS受信機である場合には、GPS衛星から受信した電波に含まれる時刻情報及び位置情報に基づいて、車両の現在位置を算出することができる。また、車両情報検出手段20が距離センサ、速度センサ、方位センサ、舵角センサ等からなる自律航法装置である場合には、例えば、基準位置(例えば、GPS受信機により検出された現在位置や、ユーザが設定した位置)と、自律航法装置により検出した距離、速度、走行中の方位、舵角等に基づき、車両の現在位置を算出することができる。
【0044】
次に、ユーザは、操作入力手段34を用いて、目的地を設定するとともに、必要に応じて、所望の出発地及び経由地を設定した後(ステップS102)、経路探索を指示する。
【0045】
経路探索手段22は、設定された出発地、経由地及び目的地の経路探索条件に従い、地図情報記憶手段28に記憶されている地図情報を用いて、経路探索を行う(ステップS103)。なお、経路探索条件は、ステップS101で取得した車両の現在位置を出発地としてもよい。経路は、出発地に対応する道路のノードから目的地に対応する道路のノードに至るまでのリンクをダイクストラ法等の手法によって探索し、時間、距離、費用等のリンクコストのうち、ユーザが希望するリンクコストの累積値が最小となる希望経路として探索することができる。
【0046】
図4は、経路探索手段22により探索され、表示手段38に地図42とともに表示された経路44の一部の説明図である。この場合、探索された経路44には、案内地点46が設定される。現在位置マークが案内地点46に到達すると、案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、案内報知が行われる。なお、案内報知とは、音声出力手段40による案内情報に基づく音声案内(右左折・直進)や表示手段38による交差点拡大図の表示などである。案内地点46は、交差点等の分岐地点や観光地等から所定距離だけ離れた地点(手前の地点)に設定される。経路の情報および案内地点46の案内情報は、案内情報記憶手段30に記憶される。
【0047】
以上のようにして経路44が探索された後、ユーザは、操作入力手段34を用いて、探索された経路44のシミュレーションを指示する(ステップS104)。この指示に従い、シミュレーション実行手段24は、経路44に沿って現在位置マークを疑似的に移動させるシミュレーションを開始する(ステップS105)。
【0048】
先ず、シミュレーション実行手段24は、図5に示すように、探索された経路44上の車両の仮想上の現在位置である現在位置マーク48の位置から、経路44に沿って経路44上の次の案内地点46までの距離Lを地図情報に基づいて算出する(ステップS106)。そして、算出した距離Lを基準距離L0と比較する(ステップS107)。
【0049】
距離L<基準距離L0であるとき(ステップS107、NO)、すなわち、現在位置マークの位置が案内地点46に近いとき、シミュレーション実行手段24は、表示制御手段36を介して表示手段38に表示する地図画像を、経路44に沿って、地図画像50a〜50eの順に更新する(ステップS108)。すなわち、現在位置マークを所定の速度(例えば、秒速17m)で擬似的に移動させ、現在位置マークの擬似的な移動に伴い、地図画像を更新して表示する(移動する現在位置マークの位置に基づく地図画像を表示する)。
【0050】
表示制御手段36は、シミュレーション実行手段24の指示に基づき地図画像50a〜50eを所定の時間間隔で切り替え、スクロール画像として表示手段38に逐次表示させる。(例えば、秒速17mであれば、1秒ごとに経路44に沿って17m進んだ地図画像が表示される。)なお、現在位置マークの擬似的な走行位置を示す現在位置マーク48は、表示された地図画像上に表示される。また、地図画像50a〜50eを切り替える時間間隔は、ユーザが任意に設定できることが好ましい。(例えば、秒速17mにおいて、1秒毎に地図画像を表示する場合は、17m進んだ位置に基づく地図画像が表示され、0.5秒ごとに地図画像を表示する場合は、8.5m進んだ位置に基づく地図画像が表示される。)
シミュレーションによる現在位置マーク48が案内地点46に到達する(案内地点46を通過する)と(ステップS109、YES)、案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、音声出力手段40及び表示手段38による案内報知が行われる(ステップS110)。
【0051】
ステップS110で案内報知が行われるのと並行して、シミュレーション実行手段24は、継続して経路44に沿って現在位置マーク48を疑似的に移動させ、表示制御手段36は、現在位置マーク48の移動に基づく地図画像を表示手段38に表示させる(ステップS111)。現在位置マーク48が案内地点46で案内される交差点等の案内対象地点を通過し(ステップS112、YES)、シミュレーションがさらに継続されている場合(ステップS113、NO)、ステップS106からの処理が繰り返される。なお、現在位置マーク48が案内地点46で案内される交差点等の案内対象地点を通過するまでは(ステップS112、NO)案内地点46に対応する案内情報が案内情報記憶手段30から読み出され、案内報知が行われる。なお、この際の案内報知は、表示手段38による交差点拡大図の表示のみとしてもよい。
【0052】
一方、探索された経路44上の車両の仮想上の現在位置である現在位置マーク48の位置から、経路44上の次の案内地点46までの距離Lが、距離L≧基準距離L0であるとき(ステップS107、YES)、経路判定手段26は、走行軌跡情報記憶手段32から、車両の過去の走行軌跡にかかる走行軌跡情報を読み出し(ステップS114)、次の案内地点46までの経路44と走行軌跡情報とを比較する(ステップS115)。
【0053】
経路判定手段26は、例えば、図2に示す走行軌跡情報に含まれる何れかの位置座標と、次の案内地点46までの経路44に属するノードの全ての位置座標が近い場合や、走行軌跡情報に過去に検出された現在位置の最寄りのノード番号が含まれる場合において、当該ノード番号の何れかと次の案内地点46までの経路44に含まれる全てのノード番号とが一致する場合などに、経路44が過去に走行したことのある経路44であると判定し(ステップS116、YES)、表示制御手段36は、地図画像50a〜50e(現在位置マークの位置)をスキップさせるか否かをユーザに問い合わせる図6の選択画像52を表示手段38に表示させる(ステップS117)。なお、図6の選択画像52には、次の案内地点46又は当該案内地点に対応した交差点等の分岐地点(案内地点から所定距離だけ奥の分岐地点)までの距離、当該案内地点に対応した交差点等の分岐地点の名称(交差点名称)、次の案内地点46又は当該案内地点に対応した交差点等の分岐地点が属する地名(○○県△△市□□町など)が含まれる。これらの情報は地図情報から抽出される。なお、走行軌跡情報の記憶方法や、次の案内地点46までの経路44が過去に走行したことのある経路44であるか否かを判定する方法は、既知の種々の方法を用いてもよい。
【0054】
ユーザが操作入力手段34を用いて選択画像52において「いいえ」を選択した場合(ステップS118、NO)、シミュレーション実行手段24は、地図画像50a〜50e(現在位置マークの擬似的な移動)を早送りで更新する(ステップS119、S108)。この場合、表示手段38には、早送りで地図画像50a〜50eが表示されるため、ユーザが過去に走行したことのある経路44であっても、その経路44を短時間で再確認することができる。なお、早送りは、1つの地図画像を表示する時間を短縮して、すぐに次の地図画像を表示する、或いは、所定時間毎に現在位置マーク48を経路44に沿って進ませる距離を長くする(例えば、1秒間に34m進むとする(秒速34mとする))ことなどを行なうことで実現され、地図画像を表示する時間が同じであれば、例えば、地図画像50a、地図画像50c、地図画像50eの順で表示される。
【0055】
ユーザが操作入力手段34を用いて選択画像52において「はい」を選択した場合(ステップS118、YES)、シミュレーション実行手段24は、現在表示されている地図画像50aを、現在位置マーク46の位置が案内地点46となる地図画像50e(図5参照)までスキップさせ(ステップS120)、表示制御手段36は、地図画像50eを表示手段38に表示させる。言い換えると、シミュレーション実行手段24は、現在位置マーク46を案内地点46まで移動(スキップ)させ、表示制御手段36は、移動した後の現在位置マークの位置に基づく地図画像50eを表示手段38に表示させる。そして、表示手段38及び音声出力手段40が案内地点46に対応する案内情報に基づく案内報知を行う(ステップS110)。この場合、ユーザが過去に走行したことのある経路44がスキップされるため、経路44の必要な部分だけを効率的に確認することができる。なお、このシミュレーション実行手段24によるスキップや早送りなどを高速のシミュレーションとして説明を行なう。
【0056】
一方、次の案内地点46までの経路44と走行軌跡情報とを比較し、経路判定手段26が、過去に走行したことがない経路44であると判定した場合(ステップS116、NO)、表示手段38には、図6に示す選択画像52は表示されず、現在位置マークの位置から次の案内地点46まで早送りでシミュレーションされる(ステップS119、S108)。この場合、ユーザは、次の案内経路46までの距離Lがたとえ長距離であっても、その間は早送りされるため、効率的に経路44を確認することができる。なお、過去に走行したことがない経路44である場合、必ずしも早送りでシミュレーションしなくてもよい。
【0057】
このように、上述した実施例では、次の案内地点46までの経路44が過去に走行したことのある経路44である場合にのみ、次の案内地点46までスキップし、または、早送りする一方、過去に走行したことのない経路44である場合には、スキップしないため、経路44の情報(経路44の道路形状(直線なのか蛇行した道なのか)や、経路44周辺の施設など)を十分に認識しながら効率的に経路44を確認することができる。
【0058】
なお、本発明は、上述した実施例に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
【0059】
例えば、次の案内地点46までの経路44が過去に走行したことのある経路44であるか否かに応じて(ステップS116)、次の案内地点46までスキップさせるか(ステップS120)、次の案内地点46まで早送りさせるか(ステップS119)を切り替える代わりに、次の案内地点46までの経路44が過去に走行したことのある経路44であれば次の案内地点46までスキップさせ、次の案内地点46までの経路44が過去に走行したことのない経路44であれば、スキップ・早送りを行なわず、通常の所定の速度で現在位置マークを擬似的に移動させてもよい。
【0060】
また、次の案内地点46までの経路44が過去に走行したことのある経路44であれば次の案内地点46まで早送りさせ、次の案内地点46までの経路44が過去に走行したことのない経路44であれば、スキップ・早送りを行なわず、通常の所定の速度で現在位置マークを擬似的に移動させてもよい。
【0061】
すなわち、次の案内地点46までの経路44を過去に走行したことがない場合より、走行したことがある場合の方が高速(例えば、早送りやスキップ)のシミュレーションが行われる。
【0062】
さらに、次の案内地点46までの経路44が過去に走行したことのある経路44である場合において(ステップS116、YES)、スキップさせるか否かをユーザに問い合わせる選択画像52を表示させることなく、スキップさせるようにしてもよいし、次の案内地点46までの経路44が過去に走行したことのある経路44である場合にスキップするか否かを予めユーザが操作入力手段38を用いて設定しておき、その設定に基づいてスキップさせるか否かを決定してもよい。
【0063】
ナビゲーション装置10は、車両に搭載されるものに限られず、例えば、ポータブルナビゲーション装置などのように、歩行者が持ち運び可能な装置であってもよい。
【0064】
地図情報記憶手段28は、車両に搭載されるナビゲーション装置10に備えられるものとして説明したが、例えば、通信手段を介してナビゲーション装置10に接続される外部の情報提供サーバから地図情報等を取得する構成とすることもできる。
【0065】
走行軌跡情報記憶手段32に記憶される走行軌跡情報は、車両が走行した経路を特定できるものであればよく、例えば、車両の出発地、経由地、目的地等のデータで構成することもできる。
【0066】
また、次の案内地点までの距離Lが距離L≧基準距離L0である場合にのみ、次の案内地点までの経路44を走行したことがあるか否かを判定したが、これに限らず、距離L<基準距離L0であっても、次の案内地点までの経路44を走行したことがあるか否かを判定し、走行したことがあれば、スキップ或いは早送りをするようにしてもよい。すなわち、次の案内地点までの距離Lが基準距離L0より長いか短いかを判定することは必須ではない。
【0067】
なお、上記実施例においては、次の案内地点46までの経路44を過去に走行したことがある場合(ステップS116、YES)に、走行したことがない場合に比較して高速のシミュレーションを行なう場合を例示したが、これに限ることはなく、例えば、次の案内地点46までの経路44を過去に走行したことがない場合に、走行したことがある場合にくらべ低速のシミュレーションを行なってもよい。すなわち、次の案内地点46までの経路44を過去に走行したことがあれば、通常の所定の速度(例えば、秒速17m)で、現在位置マークを擬似的に移動させ、次の案内地点46までの経路44を過去に走行したことがなければ、低速(例えば、秒速8m)で、現在位置マークを擬似的に移動させてもよい。
【0068】
さらに、ステップS119において、早送りさせた後に再度、距離L≧基準距離L0(ステップS107)の処理を行い、距離L<基準距離L0であれば、早送りを停止させて、所定の速度でのシミュレーションに戻してもよい。これにより、距離L以内では、早送りされることがなく、案内対象地点(交差点など)付近の施設や道路形状などを認識することが可能となる。
【符号の説明】
【0069】
10・・・ナビゲーション装置
12・・・制御手段
20・・・車両情報検出手段
22・・・経路探索手段
24・・・シミュレーション実行手段
26・・・経路判定手段
28・・・地図情報記憶手段
30・・・案内情報記憶手段
32・・・走行軌跡情報記憶手段
34・・・操作入力手段
36・・・表示制御手段
38・・・表示手段
40・・・音声出力手段
42・・・地図
44・・・経路
46・・・案内地点
48・・・現在位置マーク
50a〜50e・・・地図画像
52・・・選択画像
【特許請求の範囲】
【請求項1】
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行することを特徴とするナビゲーション装置。
【請求項2】
前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせることを特徴とする請求項1又は請求項2に記載のナビゲーション装置。
【請求項4】
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行することを特徴とするナビゲーション装置。
【請求項5】
前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定することを特徴とする請求項1〜請求項5の何れか1項に記載のナビゲーション装置。
【請求項1】
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記次の案内地点までの経路を過去に走行したことがない場合より高速のシミュレーションを実行することを特徴とするナビゲーション装置。
【請求項2】
前記シミュレーション実行手段は、前記現在位置マークを次の前記案内地点までスキップさせる、又は、前記現在位置マークの擬似的な移動を早送りさせることにより高速のシミュレーションを実行することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがあると判定された場合、前記現在位置マークを次の前記案内地点までスキップさせ、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記現在位置マークの擬似的な移動を早送りさせることを特徴とする請求項1又は請求項2に記載のナビゲーション装置。
【請求項4】
地図情報を記憶する地図情報記憶手段と、
前記地図情報に基づき目的地までの経路を探索する経路探索手段と、
前記経路上の案内地点における案内情報を記憶する案内情報記憶手段と、
前記経路に沿って現在位置を示す現在位置マークを擬似的に移動させるシミュレーションを実行するシミュレーション実行手段と、
前記シミュレーション実行手段により擬似的に移動された現在位置マークが前記案内地点に到達したとき、前記案内情報に基づく報知を行なう案内情報報知手段と、を備えるナビゲーション装置において、
過去の走行軌跡にかかる走行軌跡情報を記憶する走行軌跡情報記憶手段と、
前記現在位置マークの位置から次の前記案内地点までの経路と前記走行軌跡情報とに基づき前記次の案内地点までの経路を過去に走行したことがあるか否かを判定する経路判定手段と、を備え、
前記シミュレーション実行手段は、前記経路判定手段により、前記次の案内地点までの経路を過去に走行したことがないと判定された場合、前記次の案内地点までの経路を過去に走行したことがある場合より低速のシミュレーションを実行することを特徴とするナビゲーション装置。
【請求項5】
前記シミュレーション実行手段は、前記現在位置マークの擬似的な移動の移動速度を低下させることにより低速のシミュレーションを実行することを特徴とする請求項4に記載のナビゲーション装置。
【請求項6】
前記経路判定手段は、前記現在位置マークの位置から前記次の案内地点までの距離が基準距離以上のとき、前記次の案内地点までの経路を過去に走行したことがあるか否かを判定することを特徴とする請求項1〜請求項5の何れか1項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−98030(P2012−98030A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−243127(P2010−243127)
【出願日】平成22年10月29日(2010.10.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]