
ナビゲーション装置
【課題】経路案内対象の分岐に学習道路が接続する場合に、学習道路の信憑性を考慮した適切な態様で進行方向案内を行う。
【解決手段】経路案内の対象となる分岐点に学習道路データにおける学習道路リンクが接続している場合(S100:YES)、当該分岐点からの退出経路が学習道路リンクに該当するか否かを判断する(S102)。分岐点からの退出経路が学習道路リンクに該当しないと判断された場合(S102:NO)、当該学習道路リンクの存在を反映せず既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S104)。一方、分岐点からの退出経路が学習道路リンクに該当すると判断された場合、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S106)。
【解決手段】経路案内の対象となる分岐点に学習道路データにおける学習道路リンクが接続している場合(S100:YES)、当該分岐点からの退出経路が学習道路リンクに該当するか否かを判断する(S102)。分岐点からの退出経路が学習道路リンクに該当しないと判断された場合(S102:NO)、当該学習道路リンクの存在を反映せず既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S104)。一方、分岐点からの退出経路が学習道路リンクに該当すると判断された場合、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う(S106)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データに基づいて経路案内を行うナビゲーション装置であって、車両の走行経験に基づいて獲得した学習道路データを利用して経路案内を行うものに関する。
【背景技術】
【0002】
従来、車両等の移動体の移動軌跡に基づき、既製の地図データに登録されていない新たな道路を学習するナビゲーション装置が知られている(例えば、特許文献1,2)。道路学習機能は、移動体の現在地が地図データ内の既存の道路から離脱した地点から、再び地図データ内の既存の道路に復帰した地点までの移動軌跡に基づいて、地図データに存在しない新たな道路(学習道路)を作成して記憶することにより、地図データに登録されていない新たな道路を学習する機能である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−88733号公報
【特許文献2】特開2006−125883号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の走行経験に基づいて獲得した学習道路を経路案内に反映する場合、その学習道路が経路案内の対象として適しているかどうかという信憑性の問題がある。その問題について、以下に具体的な事例を挙げて説明する。
【0005】
目的地へ向かう経路の途中で、ユーザが経路上の分岐点(交差点やロータリ、ジャンクション等)付近で商店やパーキング等に寄り道をした際、寄り道先の敷地への導入路や駐車場内等の公道ではない場所での走行軌跡が分岐の一部を構成する学習道路として記憶されることがある。その学習道路が追加された分岐を再び通行する際、経路案内をするナビゲーション装置側で導入路や駐車場等の本来公道ではない学習道路も分岐の一部と認識される。このような場合、ナビゲーション装置側で把握されている分岐形状と実際の道路の分岐形状とが異なるため、その分岐点での進行方向の案内方法が実際の分岐形状と合致しない場合があることが問題となる。
【0006】
すなわち、分岐における経路案内で提示される進行方向は、分岐において進行すべき退出経路の接続方向に加え、その退出経路と分岐を構成する他の道路との位置関係によって決まる。例えば、分岐において現在の進行方向から右方向に転回して分岐点を退出する経路案内する場合に、その退出経路以外に当該分岐において右方向に接続する他の道路が存在すれば、右「手前」方向」や右「奥」方向という具合に、絶対的な方向以外に複数の道路同士の相対位置関係を反映した進行方向を提示することが行われている。
【0007】
そのため、分岐に接続している学習道路が実際の接続道路であれば、分岐での経路案内において提示される進行方向に、その学習道路の位置が反映されても問題はない。しかし、公道ではない導入路や駐車場に由来する学習道路が分岐を構成する道路として認識された場合、分岐における経路案内で提示される進行方向にその学習道路の存在が反映されることになる。その結果、提示された進行方向と実際の分岐形状とが異なり、経路案内が不明確になるおそれがある。例えば、本来であれば、分岐において進行すべき退出経路に対して単に「右方向」とだけ案内すれば済むところを、同じ右方向にある導入路や駐車場に由来する学習道路が分岐として認識されたがために、同じ退出経路に対して「右手前方向」や「右奥方向」といった実際と異なる案内をしてしまう場合がある。
【0008】
従来技術では、分岐点における進行方向の案内を行う際に、学習道路のリンクと地図データに既存の道路のリンクとの区別や学習道路の信憑性を経路案内に反映させることが考慮されておらず、上述の問題を解決することはできない。
【0009】
本発明は、上述の問題を解決するためになされており、経路案内対象の分岐に学習道路が接続する場合に、学習道路の信憑性を考慮した適切な態様で進行方向案内を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するためになされた本発明は、既製地図データと、車両の走行軌跡に基づき既製地図データにない道路を検知して取得した学習道路リンクを記録した学習道路データとを用いて経路案内を行う、車両の走行中に用いられるナビゲーション装置に関する。本発明のナビゲーション装置は、退出経路判断手段と経路案内手段とを備える。
【0011】
退出経路判断手段は、経路案内の対象となる分岐点に、学習道路データにおける学習道路リンクが接続している場合、経路案内による当該分岐点からの退出経路が学習道路リンクに該当するか否かを判断する。そして、経路案内手段は、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断された場合、当該学習道路リンクの存在を反映せず既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0012】
つまり、本発明では、案内対象の分岐点に接続する学習道路リンクが、その分岐点からの退出経路(すなわち、分岐点を通過して次に走行すべき誘導経路)に該当しなければ、その学習道路リンクの存在を案内すべき進行方向の判定に含めないで、既存道路リンクに基づく分岐形状のみを反映した経路案内を行う。ただし、分岐点からの退出経路が学習道路リンクに該当する場合、その学習道路リンクを含む分岐形状を反映した経路案内を実行する。このようにすることで、例えば、敷地への導入路や駐車場等に由来する学習道路のように、学習道路リンクが経路案内の対象として適さない可能性があるといった信憑性の問題を解消できる。
【0013】
例えば、図3(a)に示す進行方向案内の一例のように、退出経路でない学習道路リンクQ1を案内すべき進行方向の判定対象から外し、退出経路である既存道路リンクE3の進行方向を「右方向」と簡潔に案内すると、ユーザにとって分かりやすい。仮に、この分岐点において、退出経路ではない学習道路リンクQ1を案内すべき進行方向の判定対象に含めたと想定してみる。この場合、分岐点への進入経路における進行方向からみて右側の接続する学習道路リンクQ1及び退出経路の既存道路リンクE3の2つの接続道路の位置関係が進行方向の案内内容に反映される。その結果、これら2つの右方向のリンクを区別するために、退出経路の既存道路リンクE3に対応する進行方向を「右手前方向」などと表現することになる。このとき、この学習道路リンクQ1が分岐点における実際の接続道路ではなかった場合、案内された退出経路の進行方向が学習道路を含まない実際の分岐形状とは異なり、ユーザにとって分かり難い案内となってしまう可能性がある。本発明によれば、このような不整合を回避し、確実性を優先した経路案内を実施できる。
【0014】
あるいは、経路案内対象の分岐点からの退出経路が学習道路リンクに該当しない場合であっても、その学習道路リンクが分岐点における実際の接続道路であると推認できる場合には、その学習道路リンクを含む分岐形状を反映した経路案内を実行するように構成してもよい。そこで、請求項2に記載のように構成することが考えられる。
【0015】
すなわち、ナビゲーション装置は、経路案内の対象となる分岐点に接続している学習道路リンクが、分岐点の接続道路としての所定の信憑性条件に該当するかを判断する信憑性判断手段を更に備える。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクが信憑性条件に該当しないと判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0016】
もし、学習道路リンクが敷地への導入路や駐車場に由来するものでなく、本当に分岐点の接続道路であるならば、その学習道路リンクを含む分岐形状を反映した経路案内の方が実際の分岐形状に即したものとなり、ユーザにとって分かりやすいこともある。そこで、経路案内対象の分岐点に接続している学習道路が信憑性条件を満たすことで、実際の接続道路である可能性が高いと認められる場合には、その学習道路リンクを含む分岐形状を反映した経路案内を実行してもよい。
【0017】
ところで、分岐点に接続している学習道路リンクが実際の接続道路であるかを推認するための信憑性条件の一例としては、学習道路リンクの長さ(リンク長)を基準とするものが挙げられる(請求項3)。
【0018】
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクのリンク長が規定値未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクのリンク長が規定値以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0019】
一般的に、敷地への導入路や駐車場等、公道ではない場所での走行軌跡に基づく学習道路リンクが、実際の公道での走行軌跡に基づく学習道路リンクよりもリンク長が長くなることは考えにくい。つまり、分岐点に接続している学習道路リンクが十分な長さを持つ道路として登録されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと考えられる。よって、学習道路リンクの長さを信憑性条件の判断基準とすることは効果的である。
【0020】
あるいは、信憑性条件の他の一例としては、学習道路リンクの走行回数を基準とするものが挙げられる(請求項4)。
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクの走行回数が規定回数未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクの走行回数が規定回数以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0021】
一般的に、目的地までの経路の途中に偶々立寄った敷地や駐車場等、公道ではない場所での走行軌跡に基づいて作成された学習道路リンクは、その後同じ学習道路リンクを何度も走行することは考えにくい。つまり、分岐点に接続している学習道路リンクが何度も利用されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと考えられる。よって、学習道路リンクの走行回数を信憑性条件の判断基準とすることは効果的である。なお、学習道路リンクの走行回数は、車両が学習道路リンクに該当の道路を通行する度に、その学習道路リンクの学習道路データに対応付けて累計していくことで、信憑性条件として利用できる。
【0022】
あるいは、学習道路リンクのリンク長に基づく信憑性条件と、学習道路リンクの走行回数に基づく信憑性条件とを併せて判断するような構成であってもよい。その場合、請求項5に記載のように構成することが考えられる。
【0023】
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否か、及び、分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクのリンク長が規定値未満であり、かつ、学習道路リンクの走行回数が規定回数未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクのリンク長が規定値以上であると判断された場合、若しくは、学習道路リンクの走行回数が規定回数以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0024】
つぎに、請求項6に記載のナビゲーション装置は、以下の特徴を有する。すなわち、経路案内の対象となる分岐点に接続している学習道路リンクと、分岐点からの退出経路となる既存道路リンクとの間の位置関係が、分岐における進行方向に関する所定の位置条件に該当するか否かを判断する位置関係判断手段を更に備える。そして、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された条件下において、位置関係判断手段により所定の位置条件に該当すると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、位置関係判断手段により所定の位置条件に該当しないと判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0025】
このような構成によれば、分岐点に接続する学習道路リンクが信憑性条件を満たすか否かの判断に加え、その学習道路リンクと、分岐点からの退出経路となる既存道路リンクとの間の位置関係も考慮して、その学習道路リンクを含む分岐形状を反映した経路案内を実行するか否かを判断できる。ここでいう「分岐における進行方向に関する所定の位置条件」とは、例えば、退出経路の既存道路リンクと退出経路でない学習道路リンクとの間の位置関係が、ユーザが退出経路の進行方向を誤認する可能性が低い状態であるか否かといった条件とすることが考えられる。
【0026】
そのような条件の一例として、請求項7に記載の構成が考えられる。すなわち、位置関係判断手段は、所定の位置条件として、学習道路リンクが、分岐からの退出経路となる既存道路リンクよりも、分岐を直進する直進方向寄りに位置しているか否かを判断する。そして、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された条件下において、位置関係判断手段により学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置すると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、位置関係判断手段により学習道路リンクよりも退出経路の既存道路リンク方が直進方向寄りに位置していると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0027】
上記構成は、学習道路リンクと退出経路の既存道路リンクとが、分岐点の進入路側から見てどちらが直進方向寄り(すなわち、奥側)であるかという位置関係に応じて、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断するものである。
【0028】
例えば、分岐点の手前においてユーザが「○○方向」という進行方向を提示された場合、ユーザから見てその方向の一番手前側にある道路を真先に認識し、その奥側の道路は比較的認識しにくいという傾向がある。したがって、進行方向を提示すべき退出経路が進入経路から見て、学習道路リンクよりも手前側にあるときには、ユーザが正しい経路を認識することにおける混乱を与える可能性が低い。そこで、たとえ学習道路リンクが信憑性条件を満たしていても、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けるために、学習道路リンクを無視して分岐点の進行方向を案内する。
【0029】
反対に、進入経路から見て手前側に信憑性の劣る学習道路リンクが位置する場合、学習道路リンクを無視せず、既存道路リンクの位置と学習道路リンクの位置の違いを明確にした進行方向を提示することで、ユーザに退出経路をより分かりやすく案内できる。
【図面の簡単な説明】
【0030】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図。
【図2】分岐案内制御処理(第1実施形態)の手順を示すフローチャート。
【図3】分岐点での進行方向案内の一例を模式的に示す説明図。
【図4】分岐案内制御処理(第2実施形態:例1)の手順を示すフローチャート。
【図5】分岐点での進行方向案内の一例を模式的に示す説明図。
【図6】分岐案内制御処理(第2実施形態:例2)の手順を示すフローチャート。
【図7】分岐点での進行方向案内の一例を模式的に示す説明図。
【図8】分岐案内制御処理(第2実施形態:例3)の手順を示すフローチャート。
【図9】分岐案内制御処理(第3実施形態)の手順を示すフローチャート。
【図10】分岐点での進行方向案内の一例を模式的に示す説明図。
【発明を実施するための形態】
【0031】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[ナビゲーション装置1の構成の説明]
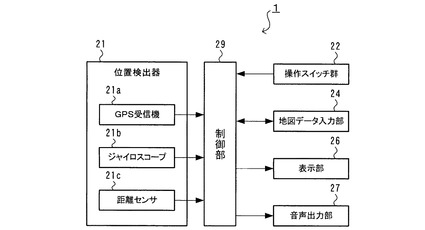
本実施形態のナビゲーション装置1は、車両に搭載されるナビゲーションシステムであり、図1に示すように、車両の現在地を検出するための位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データやプログラム等を記憶する大容量記憶媒体からデータを入力する地図データ入力部24と、地図や各種情報の表示を行うための表示部26と、各種ガイド音声を出力するための音声出力部27と、制御部29とを備える。
【0032】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信信号を受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の走行距離を出力する距離センサ21cとを備えている。そして、これらの各センサ21a〜21cからの出力信号に基づいて制御部29が、現在地、方位、速度等を算出する。なお、GPS受信機21aからの出力信号に基づいて現在位置を求める手法には様々な方式があるが、単独測位方式、相対測位方式の何れであってもよい。
【0033】
操作スイッチ群22は、表示部26の表示面上に一体に設置されるタッチパネルや表示部26の周囲に設けられるメカニカルなキースイッチ等で構成されている。
地図データ入力部24は、地図データ記憶媒体や、道路学習機能により取得した学習道路に関する学習道路データを記憶するための補助記憶媒体に記憶された各種データを制御部29に入力するための装置である。
【0034】
地図データ記憶媒体には、地図データ提供者からユーザ向けに提供された既製の地図データが格納されている。その具体的な内容は、交差点等の特定地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す道路データ、及び地図画像の表示に必要な描画データ等からなる地図データや、いわゆるマップマッチング用のデータ、経路案内用のデータ、ナビゲーション装置1の作動のためのプログラム、意匠画像データ等を含む各種データである。また、既製の地図データは、リリース当初のオリジナルの地図データに差分地図をダウンロードしたものも含まれる。
【0035】
学習道路データを記憶するための補助記憶媒体には、電気的又は磁気的に記憶内容を書き換え可能で、かつ、電源を切っても記憶内容を保持できる記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。本実施形態のナビゲーション装置1が備える道路学習機能により、地図データに既存の道路又は既に登録済みの学習道路の中には存在しない新たな道路が検出されると、検出した道路の学習道路データが補助記憶媒体に格納される。学習道路データは、既存道路との接続地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す情報や、リンク形状等を示す情報である。また、学習道路データには、自車両が各学習道路リンクを実際に走行した累計回数が個々の学習道路リンクに対応付けて記録されている。学習道路リンクの走行回数は、自車両の走行位置に基づき、学習道路リンク上を通過したと判定したときに、当該学習道路リンクの走行回数として加算される。
【0036】
表示部26は、液晶ディスプレイ等の表示面を有するカラー表示装置であり、制御部29からの映像信号の入力に応じて各種画像を表示可能である。この表示部26は、地図画像の表示や、出発地から目的地までの誘導経路、車両の現在地を示すマーク、その他の案内情報等の表示に用いられる。音声出力部27は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示部26による表示と音声出力部27による音声出力との両方でユーザに対して方向案内等の各種経路案内をすることができる。
【0037】
制御部29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMや地図データ入力部24等から読み込んだプログラムやデータに基づいて種々の処理を実行する。この制御部29が、本発明における退出経路判断手段、信憑性判断手段、位置関係判断手段、及び、経路案内手段に相当する。
【0038】
[動作の説明]
つぎに、制御部29が実行する処理について説明する。
ナビゲーション関係の処理としては、地図表示処理や経路案内処理が挙げられる。地図表示処理では、まず、位置検出器21からの検出信号に基づいて自車両の現在地を算出する。そして、地図データ入力部24から読み込んだ現在地周辺の地図データに基づいて地図画像を生成し、表示部26に現在地周辺の地図画像を表示させる。また、制御部29は、位置検出器21からの検出信号により検出した自車両の現在地を示すマークを、表示部26に表示させる地図画像上に重ね合わせて表示し、自車両の移動に伴って現在地のマークを移動させたり、地図画像をスクロールさせる。
【0039】
また、経路案内処理では、ユーザが操作スイッチ群22を操作して目的地を設定すると、制御部29は車両の現在地を出発地とし、出発地から目的地までの最適経路を地図データ入力部24から読み込んだ道路データを用いて探索する。そして、経路探索により得られた最適経路を誘導経路として、その誘導経路を地図画像上に重ね合わせて表示部26に表示させる。そして、制御部29は自車両の移動に伴って、経路上の分岐点等の特定の案内ポイント手前で、進行方向等の案内情報を表示又は音声で出力し、自車両が目的地までの誘導経路に沿って走行できるように案内する。
【0040】
さらに、本実施形態のナビゲーション装置1では、自車両が地図データに登録されている既存の道路や、既に登録されている学習道路以外の領域を走行した際、そのときの移動軌跡に基づいて新しい学習道路データを作成し、それを地図データ入力部24の補助記憶媒体に学習道路データとして登録する道路学習機能を備える。制御部29は、この補助記憶媒体に登録されている学習道路データと、地図データに既存の道路データとをそれぞれ読出し、1つの地図データとして整合性を取るように加工した上で、地図表示処理や経路案内処理に利用する。
【0041】
具体的には、制御部29は、自車両の走行中に定期的に位置検出器21により現在地を特定し、自車両が地図データに既存の道路又は既に登録済みの学習道路の範囲から離脱した地点から、再び地図データに既存の道路又は登録済みの学習道路へ復帰する地点までの移動軌跡に基づいて、学習道路データを生成する。そして、その生成した学習道路データを補助記憶媒体に記録する。この学習道路データは、既存の道路リンクとの接続点(離脱地点、復帰地点)に相当するノードと、そのノード間を接続するリンクからなる道路の接続状況を示す情報や、離脱地点と復帰地点との間の道路形状を示す座標点の集合から構成される。
【0042】
[第1実施形態]
つぎに、制御部29が実行する分岐案内制御処理の第1実施形態について、図2のフローチャートを参照しながら説明する。この分岐案内制御処理(第1実施形態)は、上述した経路案内処理の実行中、車両が経路案内の対象となる交差点やロータリ、ジャンクション等の分岐点まで所定距離に到達した時点で実行が開始される処理である。
【0043】
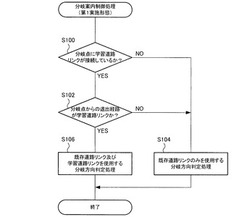
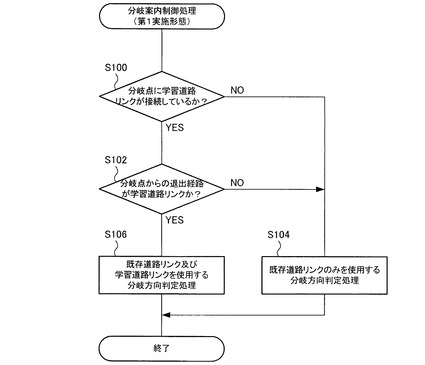
制御部29が分岐案内制御処理を開始すると、まず、経路案内対象の分岐点付近の学習道路データに基づき、この分岐点のノードに学習道路リンクが接続しているか否かを判定する(S100)。分岐点に学習道路リンクが接続している場合(S100:YES)、S102に進み、分岐点に学習道路リンクが接続していない場合(S100:NO)、S104に進む。
【0044】
分岐点に学習道路リンクが接続していない場合に進むS104では、既存道路リンクのみを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する各既存道路リンク接続方向に基づき、分岐点からの退出経路(分岐点のノードを通過して次に走行すべき誘導経路)について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。
【0045】
一方、分岐点に学習道路リンクが接続している場合に進むS102では、この分岐点からの退出経路が学習道路リンクであるか否かを判定する。分岐点からの退出経路が学習道路リンクではない場合(S102:NO)、S104に進み、分岐点からの退出経路が学習道路リンクである場合(S102:YES)、S106に進む。
【0046】
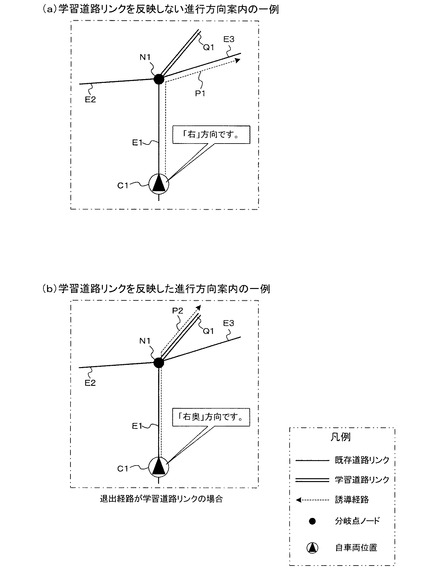
分岐点からの退出経路が学習道路リンクではない、すなわち、退出経路が既存道路リンクである場合に進むS104では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する既存道路リンク及び学習道路リンクの中から既存道路リンクの接続方向のみを考慮して、分岐点からの退出経路について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。この場合の進行方向案内の一例を図3(a)に示す。
【0047】
図3(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ1が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ここでは、分岐点からの退出経路が既存道路リンクに該当することを条件に、学習道路リンクQ1の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ1を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。なお、ここでは右折の場合を例示したが、左折の場合でも同様の扱いとなる(以下、他の案内事例についても同様)。
【0048】
図2のフローチャートの説明に戻る。分岐点からの退出経路が学習道路リンクである場合に進むS106では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する既存道路リンク及び学習道路リンクの各リンクの接続方向に基づき、分岐点からの退出経路について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。この場合の進行方向案内の一例を図3(b)に示す。
【0049】
図3(b)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、学習道路リンクQ1へと退出する誘導経路P2を想定している。この分岐点では、退出経路である学習道路リンクQ1、及び、退出経路ではない既存道路リンクE3が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ここでは、分岐点からの退出経路が学習道路リンクに該当することを条件に、学習道路リンクQ1及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の学習道路リンクQ1への進路方向として、「右奥」を提示する。
【0050】
[第1実施形態の効果]
第1実施形態では、案内対象の分岐点に接続する学習道路リンクが、その分岐点からの退出経路に該当しなければ、その学習道路リンクの存在を進行方向の判定対象に含めずに、既存道路リンクに基づく分岐形状のみを反映した経路案内を行う。このようにすることで、例えば、敷地への導入路や駐車場等に由来する学習道路のように、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けることができる。
【0051】
[第2実施形態]
上述の第1実施形態では、分岐点からの退出経路が学習道路リンクであるか否かを基準に、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断する構成について説明した。これに対し、分岐点に接続している学習道路リンクの信憑性を判断基準とする構成を更に加えてもよい。ここでは、学習道路リンクの信憑性の判断方法として、例1〜例3の3つの事例について説明する。
【0052】
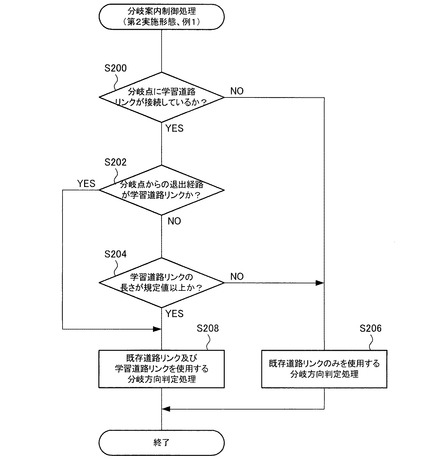
〈例1〉
制御部29が実行する分岐案内制御処理の第2実施形態(例1)について図4のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS200,S202の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0053】
S202で分岐点からの退出経路が学習道路リンクではないと判定した場合(S202:NO)、S204に進む。S204では、学習道路データに基づき、分岐点に接続する学習道路リンクのリンク長が規定値以上であるか否かを判定する。ここでは、分岐点に接続する学習道路リンクの長さを信憑性の判断基準としている。つまり、学習道路リンクのリンク長が規定値以上(信憑性:高)であれば、その学習道路リンクが分岐点の接続道路であると推定し、リンク長が規定値未満(信憑性:低)であれば、その学習道路リンクが接続道路でないと推定する。
【0054】
このように推定する理由として、敷地への導入路や駐車場等、公道ではない場所での走行軌跡に基づく学習道路リンクが、実際の公道での走行軌跡に基づく学習道路リンクよりもリンク長が長くなることが、一般的には考えにくいからである。このような観点により、分岐点に接続している学習道路リンクが十分な長さを持つ道路として登録されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと推定できる。なお、本実施形態では、学習道路リンクが接続している分岐点から半径30mをこの信憑判断の規定値としているが、この値に限らず、種々の規定値を採用することができる。例えば、分岐点からの距離に基づく規定値に限らず、道路学習リンクの道のりそのものを規定値とすることが考えられる。
【0055】
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合(S204:NO)、S206に進み、分岐点に接続する学習道路リンクのリンク長が規定値以上の場合(S204:YES)、S208に進む。
【0056】
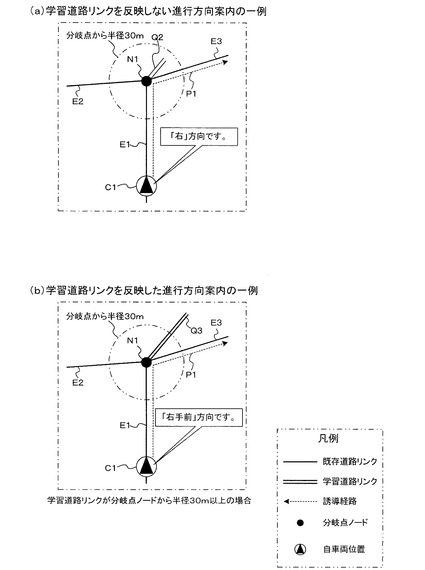
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合に進むS206では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図5(a)に示す。
【0057】
図5(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ2が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ2が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ただし、学習道路リンクQ2は、分岐点から半径30m未満の範囲までしか延出していない。
【0058】
ここでは、分岐点からの退出経路が既存道路リンクに該当し、かつ、学習道路リンクQ2のリンク長が分岐点から半径30m未満であることを条件に、学習道路リンクQ2の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ2が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ2を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0059】
図4のフローチャートの説明に戻る。分岐点に接続する学習道路リンクのリンク長が規定値以上の場合に進むS208では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図5(b)に示す。
【0060】
図5(b)に示す事例において、誘導経路P1は図5(a)の事例と同様である。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ3が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、学習道路リンクQ3は、分岐点から半径30m以上の範囲まで延出している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ3が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0061】
ここでは、分岐点からの退出経路が学習道路リンクでなくとも、学習道路リンクQ3のリンク長が分岐点から半径30m以上であることを条件に、学習道路リンクQ3及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ3が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の既存道路リンクE3への進路方向として、「右手前」を提示する。
【0062】
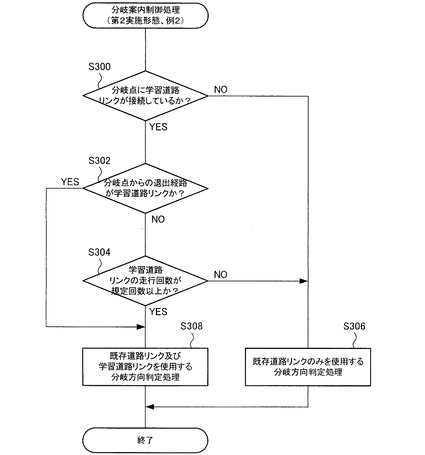
〈例2〉
つぎに、制御部29が実行する分岐案内制御処理の第2実施形態(例2)について図6のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS300,S302の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0063】
S302で分岐点からの退出経路が学習道路リンクではないと判定した場合(S302:NO)、S304に進む。S304では、学習道路データに基づき、分岐点に接続する学習道路リンクの走行回数が規定回数(例えば、3回)以上であるか否かを判定する。ここでは、分岐点に接続する学習道路リンクの走行回数を信憑性の判断基準としている。つまり、学習道路リンクの走行回数が規定回数以上(信憑性:高)であれば、その学習道路リンクが分岐点の接続道路であると推定し、走行回数が規定回数未満(信憑性:低)であれば、その学習道路リンクが接続道路でないと推定する。
【0064】
このように推定する理由として、目的地までの経路の途中に偶々立寄った敷地や駐車場等、公道ではない場所での走行軌跡に基づいて作成された学習道路リンクは、その後同じ経路を何度も走行することは一般的には考えにくいためである。このような観点により、分岐点に接続している学習道路リンクが何度も利用されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと推定できる。
【0065】
なお、本実施形態では、規定回数を例えば3回としているが、この回数に限らず、種々の規定回数を採用することができる。分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合(S304:NO)、S306に進み、分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合(S304:YES)、S308に進む。
【0066】
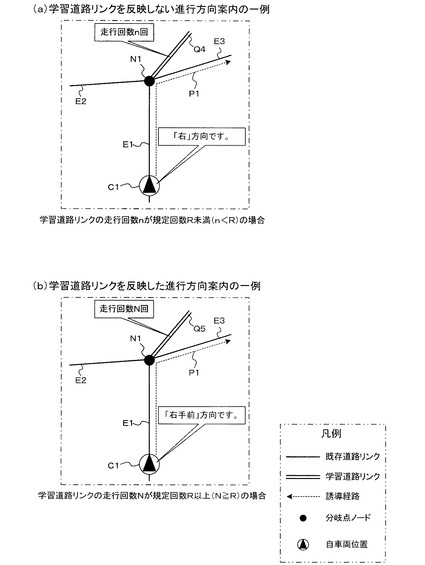
分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合に進むS306では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図7(a)に示す。
【0067】
図7(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ4が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ4が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。また、学習道路リンクQ4は、これまでの累計の走行回数がn回(<規定回数R)であるとする。
【0068】
ここでは、分岐点からの退出経路が既存道路リンクに該当し、かつ、学習道路リンクQ4の走行回数nが規定回数R未満であることを条件に、学習道路リンクQ4の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ4が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ4を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0069】
図6のフローチャートの説明に戻る。分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合に進むS308では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図7(b)に示す。
【0070】
図7(b)に示す事例において、誘導経路P1は図7(a)の事例と同様である。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ5が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。また、学習道路リンクQ5は、これまでの走行回数がN回(≧規定回数R)であるとする。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ5が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0071】
ここでは、分岐点からの退出経路が学習道路リンクでなくとも、学習道路リンクQ5の走行回数Nが基準回数R以上であることを条件に、学習道路リンクQ5及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ5が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の既存道路リンクE3への進路方向として、「右手前」を提示する。
【0072】
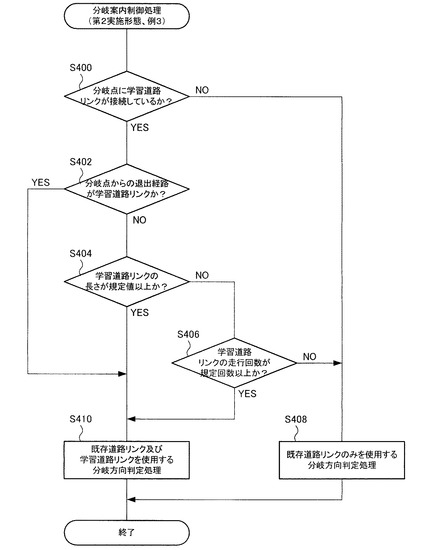
〈例3〉
制御部29が実行する分岐案内制御処理の第2実施形態(例3)について図8のフローチャートを参照しながら説明する。この処理では、学習道路リンクの信憑性の判断基準として、上述の例1,2説明した学習道路リンクのリンク長と走行回数とを併用する。なお、このフローチャートにおけるS400,S402の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0073】
S402で分岐点からの退出経路が学習道路リンクではないと判定した場合(S402:NO)、S404に進む。S404では、学習道路データに基づき、分岐点に接続する学習道路リンクのリンク長が規定値以上であるか否かを判定する。ここでは、学習道路リンクのリンク長が規定値以上であれば、その学習道路リンクが分岐点の接続道路であると推定し、リンク長が規定値未満であれば、次の走行回数による信憑性の判定に移る。分岐点に接続する学習道路リンクのリンク長が規定値未満の場合(S404:NO)、S406に進み、分岐点に接続する学習道路リンクのリンク長が規定値以上の場合(S404:YES)、S410に進む。
【0074】
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合に進むS406では、学習道路データに基づき、分岐点に接続する学習道路リンクの走行回数が規定回数(例えば、3回)以上であるか否かを判定する。ここでは、学習道路リンクの走行回数が規定回数以上であれば、その学習道路リンクが分岐点の接続道路であると推定し、走行回数が規定回数未満であれば、その学習道路リンクが接続道路でないと推定する。分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合(S406:NO)、S408に進み、分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合(S406:YES)、S410に進む。
【0075】
分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合に進むS408では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例は、上述の図5(a)及び図7(a)に示す事例に準ずる。一方、S404又はS406で肯定判定をした場合に進むS410では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例は、上述の図5(b)又は図7(b)に示す事例に準ずる。
【0076】
[第2実施形態の効果]
もし、分岐点に接続している学習道路リンクが敷地への導入路や駐車場に由来するものでなく、本当に分岐点の接続道路であるならば、その学習道路リンクを含む分岐形状を反映した経路案内の方が実際の分岐形状に即したものとなり、ユーザにとって分かりやすいもこともある。そこで、経路案内対象の分岐点に接続している学習道路がリンク長や走行回数といった信憑性条件を満たすことを条件に、その学習道路リンクを含む分岐形状を反映した経路案内を実行することで、信憑性の劣る学習道路リンクを加味して経路案内をするリスクを低減できる。
【0077】
[第3実施形態]
上述の第2実施形態は、接続道路としての学習道路リンクの信憑性を判断基準とし、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断するものである。これに対し、退出経路に該当の既存道路リンクと、退出経路ではない学習道路リンクとの位置関係を判断基準とする構成を更に加えてもよい。
【0078】
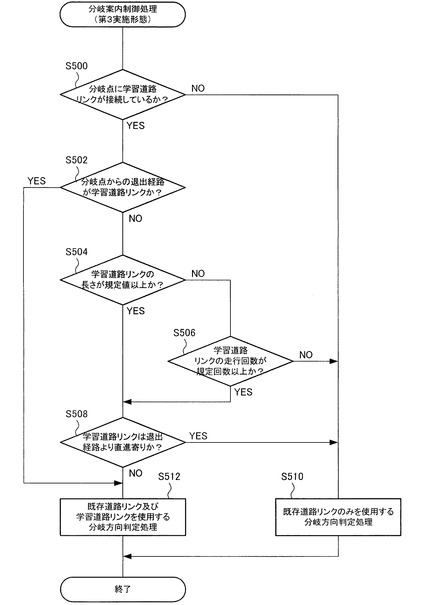
制御部29が実行する分岐案内制御処理の第3実施形態について図9のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS500〜S506の手順については、上述の第2実施形態(例3)におけるS400〜S406(図8)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0079】
S504で学習道路リンクのリンク長が規定値以上であると判定した場合(S504:YES)、あるいは、S506で学習道路リンクの走行回数が規定回数以上であると判定した場合(S504:YES)、S508に進む。S508では、学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置しているか否かを判定する。ここでいう直進方向とは、分岐点への進入経路の進行方向に沿って分岐点を直進すると仮定した場合の進行方向のことを指す。そして、学習道路リンクが退出経路よりも直進方向寄りに位置するとは、学習道路リンクと直進方向とのなす角が退出経路と直進方向とのなす角よりも小さい(直進方向に対する接続角度がより小さい)ことを意味する。
【0080】
学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置している場合(S508:YES)、S510に進み、退出経路の既存道路リンクの方が直進方向寄り位置している場合(S508:NO)、S512に進む。
【0081】
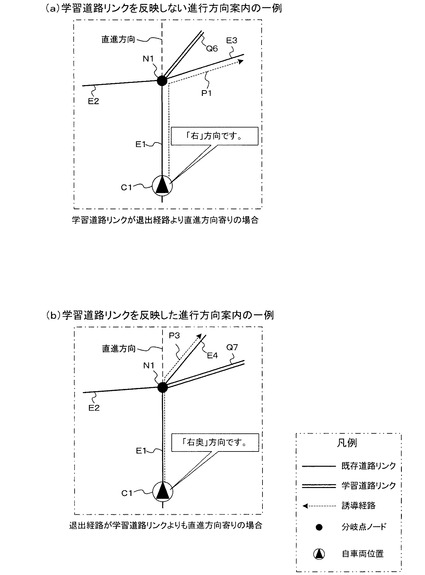
学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置している場合に進むS510では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図10(a)に示す。
【0082】
図10(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ6が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、学習道路リンクQ6は、退出経路である既存道路リンクE3よりも直進方向寄りに位置している。すなわち、進入経路の既存道路リンクE1側から見て学習道路リンクQ6が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0083】
ここでは、学習道路リンクQ6がリンク長又は走行回数の信憑性条件を満たしており、さらに、この学習道路リンクQ6が、退出経路である既存道路リンクE3よりも直進方向寄りに位置していることを条件に、学習道路リンクQ6の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ6が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ6を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0084】
このケースでは、学習道路リンクQ6を無視して進行方向を単純に「右」と提示したとしても、ユーザは一番右手前側にある正しい退出経路(既存道路リンクE3)を容易に認識できると考えられる。なぜならば、このようなケースでユーザが右方向という提示をされた場合、ユーザから見て一番右手前側にある道路を真先に認識する傾向が強いためである。この場合、ユーザが正しい経路を認識することにおける混乱を与える可能性が低い。そこで、たとえ学習道路リンクが信憑性条件を満たしていても、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けるために、学習道路リンクを無視して分岐点の進行方向を案内するのである。
【0085】
図9のフローチャートの説明に戻る。学習道路リンクよりも退出経路の既存道路リンクの方が直進方向寄りに位置している場合進むS512では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図10(b)に示す。
【0086】
図10(b)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE4へと退出する誘導経路P3を想定している。この分岐点では、退出経路である既存道路リンクE4、及び、退出経路ではない学習道路リンクQ7が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、退出経路である既存道路リンクE4は、学習道路リンクQ7よりも直進方向寄りに位置している。すなわち、進入経路の既存道路リンクE1側から見て学習道路リンクQ7が「右手前」、既存道路リンクE4が「右奥」という位置関係にある。
【0087】
ここでは、学習道路リンクQ7がリンク長又は走行回数の信憑性条件を満たしており、さらに、この学習道路リンクQ7よりも退出経路である既存道路リンクE4の方が直進方向寄りに位置していることを条件に、学習道路リンクQ7及び既存道路リンクE4の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ7が「右手前」、既存道路リンクE4が「右奥」という位置関係に基づき、退出経路の既存道路リンクE4への進路方向として、「右奥」を提示する。
【0088】
このケースでは、仮に、学習道路リンクQ7を無視して単純に「右」と提示したとすると、右折すべき道路が右手前方向の学習道路リンクQ7なのか、右奥方向の既存道路リンクE4なのか、正しい経路がユーザにとって分かりにくい。なぜならば、ユーザが右方向という提示をされた場合、ユーザから見て右奥側にある道路をそれと認識するのは難しいためである。そこで、この場合には、学習道路リンクを無視せず、既存道路リンクの位置と学習道路リンクの位置とを加味した進行方向を提示して分岐点の進行方向を案内するのである。
【0089】
[第3実施形態の効果]
分岐点に接続する学習道路リンクが接続道路としての信憑性条件を満たすか否かの判断に加え、分岐点からの退出経路と学習道路リンクとの間の位置関係に基づいて、学習道路リンクを反映した経路案内を実行するか否かを判断できる。ここでは、学習道路リンクと退出経路の既存道路リンクとで、どちらが分岐点の進入路側から見て直進方向寄りに位置するかという判断基準を採用した。これは、ユーザが退出経路の進行方向を誤認する可能性が低い位置関係(手前か奥か)を考慮した判断基準である。このような判断基準を採用することで、分岐点からの退出経路をユーザに認識させやすい経路案内を実現できる。
【符号の説明】
【0090】
1…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、22…操作スイッチ群、24…地図データ入力部、25…学習道路データ記憶部、26…表示部、27…音声出力部、29…制御部。
【技術分野】
【0001】
本発明は、地図データに基づいて経路案内を行うナビゲーション装置であって、車両の走行経験に基づいて獲得した学習道路データを利用して経路案内を行うものに関する。
【背景技術】
【0002】
従来、車両等の移動体の移動軌跡に基づき、既製の地図データに登録されていない新たな道路を学習するナビゲーション装置が知られている(例えば、特許文献1,2)。道路学習機能は、移動体の現在地が地図データ内の既存の道路から離脱した地点から、再び地図データ内の既存の道路に復帰した地点までの移動軌跡に基づいて、地図データに存在しない新たな道路(学習道路)を作成して記憶することにより、地図データに登録されていない新たな道路を学習する機能である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−88733号公報
【特許文献2】特開2006−125883号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の走行経験に基づいて獲得した学習道路を経路案内に反映する場合、その学習道路が経路案内の対象として適しているかどうかという信憑性の問題がある。その問題について、以下に具体的な事例を挙げて説明する。
【0005】
目的地へ向かう経路の途中で、ユーザが経路上の分岐点(交差点やロータリ、ジャンクション等)付近で商店やパーキング等に寄り道をした際、寄り道先の敷地への導入路や駐車場内等の公道ではない場所での走行軌跡が分岐の一部を構成する学習道路として記憶されることがある。その学習道路が追加された分岐を再び通行する際、経路案内をするナビゲーション装置側で導入路や駐車場等の本来公道ではない学習道路も分岐の一部と認識される。このような場合、ナビゲーション装置側で把握されている分岐形状と実際の道路の分岐形状とが異なるため、その分岐点での進行方向の案内方法が実際の分岐形状と合致しない場合があることが問題となる。
【0006】
すなわち、分岐における経路案内で提示される進行方向は、分岐において進行すべき退出経路の接続方向に加え、その退出経路と分岐を構成する他の道路との位置関係によって決まる。例えば、分岐において現在の進行方向から右方向に転回して分岐点を退出する経路案内する場合に、その退出経路以外に当該分岐において右方向に接続する他の道路が存在すれば、右「手前」方向」や右「奥」方向という具合に、絶対的な方向以外に複数の道路同士の相対位置関係を反映した進行方向を提示することが行われている。
【0007】
そのため、分岐に接続している学習道路が実際の接続道路であれば、分岐での経路案内において提示される進行方向に、その学習道路の位置が反映されても問題はない。しかし、公道ではない導入路や駐車場に由来する学習道路が分岐を構成する道路として認識された場合、分岐における経路案内で提示される進行方向にその学習道路の存在が反映されることになる。その結果、提示された進行方向と実際の分岐形状とが異なり、経路案内が不明確になるおそれがある。例えば、本来であれば、分岐において進行すべき退出経路に対して単に「右方向」とだけ案内すれば済むところを、同じ右方向にある導入路や駐車場に由来する学習道路が分岐として認識されたがために、同じ退出経路に対して「右手前方向」や「右奥方向」といった実際と異なる案内をしてしまう場合がある。
【0008】
従来技術では、分岐点における進行方向の案内を行う際に、学習道路のリンクと地図データに既存の道路のリンクとの区別や学習道路の信憑性を経路案内に反映させることが考慮されておらず、上述の問題を解決することはできない。
【0009】
本発明は、上述の問題を解決するためになされており、経路案内対象の分岐に学習道路が接続する場合に、学習道路の信憑性を考慮した適切な態様で進行方向案内を行う技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するためになされた本発明は、既製地図データと、車両の走行軌跡に基づき既製地図データにない道路を検知して取得した学習道路リンクを記録した学習道路データとを用いて経路案内を行う、車両の走行中に用いられるナビゲーション装置に関する。本発明のナビゲーション装置は、退出経路判断手段と経路案内手段とを備える。
【0011】
退出経路判断手段は、経路案内の対象となる分岐点に、学習道路データにおける学習道路リンクが接続している場合、経路案内による当該分岐点からの退出経路が学習道路リンクに該当するか否かを判断する。そして、経路案内手段は、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断された場合、当該学習道路リンクの存在を反映せず既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0012】
つまり、本発明では、案内対象の分岐点に接続する学習道路リンクが、その分岐点からの退出経路(すなわち、分岐点を通過して次に走行すべき誘導経路)に該当しなければ、その学習道路リンクの存在を案内すべき進行方向の判定に含めないで、既存道路リンクに基づく分岐形状のみを反映した経路案内を行う。ただし、分岐点からの退出経路が学習道路リンクに該当する場合、その学習道路リンクを含む分岐形状を反映した経路案内を実行する。このようにすることで、例えば、敷地への導入路や駐車場等に由来する学習道路のように、学習道路リンクが経路案内の対象として適さない可能性があるといった信憑性の問題を解消できる。
【0013】
例えば、図3(a)に示す進行方向案内の一例のように、退出経路でない学習道路リンクQ1を案内すべき進行方向の判定対象から外し、退出経路である既存道路リンクE3の進行方向を「右方向」と簡潔に案内すると、ユーザにとって分かりやすい。仮に、この分岐点において、退出経路ではない学習道路リンクQ1を案内すべき進行方向の判定対象に含めたと想定してみる。この場合、分岐点への進入経路における進行方向からみて右側の接続する学習道路リンクQ1及び退出経路の既存道路リンクE3の2つの接続道路の位置関係が進行方向の案内内容に反映される。その結果、これら2つの右方向のリンクを区別するために、退出経路の既存道路リンクE3に対応する進行方向を「右手前方向」などと表現することになる。このとき、この学習道路リンクQ1が分岐点における実際の接続道路ではなかった場合、案内された退出経路の進行方向が学習道路を含まない実際の分岐形状とは異なり、ユーザにとって分かり難い案内となってしまう可能性がある。本発明によれば、このような不整合を回避し、確実性を優先した経路案内を実施できる。
【0014】
あるいは、経路案内対象の分岐点からの退出経路が学習道路リンクに該当しない場合であっても、その学習道路リンクが分岐点における実際の接続道路であると推認できる場合には、その学習道路リンクを含む分岐形状を反映した経路案内を実行するように構成してもよい。そこで、請求項2に記載のように構成することが考えられる。
【0015】
すなわち、ナビゲーション装置は、経路案内の対象となる分岐点に接続している学習道路リンクが、分岐点の接続道路としての所定の信憑性条件に該当するかを判断する信憑性判断手段を更に備える。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクが信憑性条件に該当しないと判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0016】
もし、学習道路リンクが敷地への導入路や駐車場に由来するものでなく、本当に分岐点の接続道路であるならば、その学習道路リンクを含む分岐形状を反映した経路案内の方が実際の分岐形状に即したものとなり、ユーザにとって分かりやすいこともある。そこで、経路案内対象の分岐点に接続している学習道路が信憑性条件を満たすことで、実際の接続道路である可能性が高いと認められる場合には、その学習道路リンクを含む分岐形状を反映した経路案内を実行してもよい。
【0017】
ところで、分岐点に接続している学習道路リンクが実際の接続道路であるかを推認するための信憑性条件の一例としては、学習道路リンクの長さ(リンク長)を基準とするものが挙げられる(請求項3)。
【0018】
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクのリンク長が規定値未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクのリンク長が規定値以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0019】
一般的に、敷地への導入路や駐車場等、公道ではない場所での走行軌跡に基づく学習道路リンクが、実際の公道での走行軌跡に基づく学習道路リンクよりもリンク長が長くなることは考えにくい。つまり、分岐点に接続している学習道路リンクが十分な長さを持つ道路として登録されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと考えられる。よって、学習道路リンクの長さを信憑性条件の判断基準とすることは効果的である。
【0020】
あるいは、信憑性条件の他の一例としては、学習道路リンクの走行回数を基準とするものが挙げられる(請求項4)。
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクの走行回数が規定回数未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクの走行回数が規定回数以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0021】
一般的に、目的地までの経路の途中に偶々立寄った敷地や駐車場等、公道ではない場所での走行軌跡に基づいて作成された学習道路リンクは、その後同じ学習道路リンクを何度も走行することは考えにくい。つまり、分岐点に接続している学習道路リンクが何度も利用されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと考えられる。よって、学習道路リンクの走行回数を信憑性条件の判断基準とすることは効果的である。なお、学習道路リンクの走行回数は、車両が学習道路リンクに該当の道路を通行する度に、その学習道路リンクの学習道路データに対応付けて累計していくことで、信憑性条件として利用できる。
【0022】
あるいは、学習道路リンクのリンク長に基づく信憑性条件と、学習道路リンクの走行回数に基づく信憑性条件とを併せて判断するような構成であってもよい。その場合、請求項5に記載のように構成することが考えられる。
【0023】
すなわち、信憑性判断手段は、信憑性条件として、分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否か、及び、分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断する。そして、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当しないと判断され、かつ、信憑性判断手段により学習道路リンクのリンク長が規定値未満であり、かつ、学習道路リンクの走行回数が規定回数未満であると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、退出経路判断手段により分岐点からの退出経路が学習道路リンクに該当すると判断された場合、又は、信憑性判断手段により学習道路リンクのリンク長が規定値以上であると判断された場合、若しくは、学習道路リンクの走行回数が規定回数以上であると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0024】
つぎに、請求項6に記載のナビゲーション装置は、以下の特徴を有する。すなわち、経路案内の対象となる分岐点に接続している学習道路リンクと、分岐点からの退出経路となる既存道路リンクとの間の位置関係が、分岐における進行方向に関する所定の位置条件に該当するか否かを判断する位置関係判断手段を更に備える。そして、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された条件下において、位置関係判断手段により所定の位置条件に該当すると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、位置関係判断手段により所定の位置条件に該当しないと判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0025】
このような構成によれば、分岐点に接続する学習道路リンクが信憑性条件を満たすか否かの判断に加え、その学習道路リンクと、分岐点からの退出経路となる既存道路リンクとの間の位置関係も考慮して、その学習道路リンクを含む分岐形状を反映した経路案内を実行するか否かを判断できる。ここでいう「分岐における進行方向に関する所定の位置条件」とは、例えば、退出経路の既存道路リンクと退出経路でない学習道路リンクとの間の位置関係が、ユーザが退出経路の進行方向を誤認する可能性が低い状態であるか否かといった条件とすることが考えられる。
【0026】
そのような条件の一例として、請求項7に記載の構成が考えられる。すなわち、位置関係判断手段は、所定の位置条件として、学習道路リンクが、分岐からの退出経路となる既存道路リンクよりも、分岐を直進する直進方向寄りに位置しているか否かを判断する。そして、信憑性判断手段により学習道路リンクが信憑性条件に該当すると判断された条件下において、位置関係判断手段により学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置すると判断された場合、経路案内手段は、当該学習道路リンクの存在を反映せず既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。一方、位置関係判断手段により学習道路リンクよりも退出経路の既存道路リンク方が直進方向寄りに位置していると判断された場合、経路案内手段は、当該学習道路リンク及び既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う。
【0027】
上記構成は、学習道路リンクと退出経路の既存道路リンクとが、分岐点の進入路側から見てどちらが直進方向寄り(すなわち、奥側)であるかという位置関係に応じて、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断するものである。
【0028】
例えば、分岐点の手前においてユーザが「○○方向」という進行方向を提示された場合、ユーザから見てその方向の一番手前側にある道路を真先に認識し、その奥側の道路は比較的認識しにくいという傾向がある。したがって、進行方向を提示すべき退出経路が進入経路から見て、学習道路リンクよりも手前側にあるときには、ユーザが正しい経路を認識することにおける混乱を与える可能性が低い。そこで、たとえ学習道路リンクが信憑性条件を満たしていても、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けるために、学習道路リンクを無視して分岐点の進行方向を案内する。
【0029】
反対に、進入経路から見て手前側に信憑性の劣る学習道路リンクが位置する場合、学習道路リンクを無視せず、既存道路リンクの位置と学習道路リンクの位置の違いを明確にした進行方向を提示することで、ユーザに退出経路をより分かりやすく案内できる。
【図面の簡単な説明】
【0030】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図。
【図2】分岐案内制御処理(第1実施形態)の手順を示すフローチャート。
【図3】分岐点での進行方向案内の一例を模式的に示す説明図。
【図4】分岐案内制御処理(第2実施形態:例1)の手順を示すフローチャート。
【図5】分岐点での進行方向案内の一例を模式的に示す説明図。
【図6】分岐案内制御処理(第2実施形態:例2)の手順を示すフローチャート。
【図7】分岐点での進行方向案内の一例を模式的に示す説明図。
【図8】分岐案内制御処理(第2実施形態:例3)の手順を示すフローチャート。
【図9】分岐案内制御処理(第3実施形態)の手順を示すフローチャート。
【図10】分岐点での進行方向案内の一例を模式的に示す説明図。
【発明を実施するための形態】
【0031】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[ナビゲーション装置1の構成の説明]
本実施形態のナビゲーション装置1は、車両に搭載されるナビゲーションシステムであり、図1に示すように、車両の現在地を検出するための位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データやプログラム等を記憶する大容量記憶媒体からデータを入力する地図データ入力部24と、地図や各種情報の表示を行うための表示部26と、各種ガイド音声を出力するための音声出力部27と、制御部29とを備える。
【0032】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信信号を受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の走行距離を出力する距離センサ21cとを備えている。そして、これらの各センサ21a〜21cからの出力信号に基づいて制御部29が、現在地、方位、速度等を算出する。なお、GPS受信機21aからの出力信号に基づいて現在位置を求める手法には様々な方式があるが、単独測位方式、相対測位方式の何れであってもよい。
【0033】
操作スイッチ群22は、表示部26の表示面上に一体に設置されるタッチパネルや表示部26の周囲に設けられるメカニカルなキースイッチ等で構成されている。
地図データ入力部24は、地図データ記憶媒体や、道路学習機能により取得した学習道路に関する学習道路データを記憶するための補助記憶媒体に記憶された各種データを制御部29に入力するための装置である。
【0034】
地図データ記憶媒体には、地図データ提供者からユーザ向けに提供された既製の地図データが格納されている。その具体的な内容は、交差点等の特定地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す道路データ、及び地図画像の表示に必要な描画データ等からなる地図データや、いわゆるマップマッチング用のデータ、経路案内用のデータ、ナビゲーション装置1の作動のためのプログラム、意匠画像データ等を含む各種データである。また、既製の地図データは、リリース当初のオリジナルの地図データに差分地図をダウンロードしたものも含まれる。
【0035】
学習道路データを記憶するための補助記憶媒体には、電気的又は磁気的に記憶内容を書き換え可能で、かつ、電源を切っても記憶内容を保持できる記憶媒体(例えばハードディスクやフラッシュメモリ等)が用いられる。本実施形態のナビゲーション装置1が備える道路学習機能により、地図データに既存の道路又は既に登録済みの学習道路の中には存在しない新たな道路が検出されると、検出した道路の学習道路データが補助記憶媒体に格納される。学習道路データは、既存道路との接続地点に対応するノード及びノード間を接続するリンクによって道路の接続状況を示す情報や、リンク形状等を示す情報である。また、学習道路データには、自車両が各学習道路リンクを実際に走行した累計回数が個々の学習道路リンクに対応付けて記録されている。学習道路リンクの走行回数は、自車両の走行位置に基づき、学習道路リンク上を通過したと判定したときに、当該学習道路リンクの走行回数として加算される。
【0036】
表示部26は、液晶ディスプレイ等の表示面を有するカラー表示装置であり、制御部29からの映像信号の入力に応じて各種画像を表示可能である。この表示部26は、地図画像の表示や、出発地から目的地までの誘導経路、車両の現在地を示すマーク、その他の案内情報等の表示に用いられる。音声出力部27は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示部26による表示と音声出力部27による音声出力との両方でユーザに対して方向案内等の各種経路案内をすることができる。
【0037】
制御部29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMや地図データ入力部24等から読み込んだプログラムやデータに基づいて種々の処理を実行する。この制御部29が、本発明における退出経路判断手段、信憑性判断手段、位置関係判断手段、及び、経路案内手段に相当する。
【0038】
[動作の説明]
つぎに、制御部29が実行する処理について説明する。
ナビゲーション関係の処理としては、地図表示処理や経路案内処理が挙げられる。地図表示処理では、まず、位置検出器21からの検出信号に基づいて自車両の現在地を算出する。そして、地図データ入力部24から読み込んだ現在地周辺の地図データに基づいて地図画像を生成し、表示部26に現在地周辺の地図画像を表示させる。また、制御部29は、位置検出器21からの検出信号により検出した自車両の現在地を示すマークを、表示部26に表示させる地図画像上に重ね合わせて表示し、自車両の移動に伴って現在地のマークを移動させたり、地図画像をスクロールさせる。
【0039】
また、経路案内処理では、ユーザが操作スイッチ群22を操作して目的地を設定すると、制御部29は車両の現在地を出発地とし、出発地から目的地までの最適経路を地図データ入力部24から読み込んだ道路データを用いて探索する。そして、経路探索により得られた最適経路を誘導経路として、その誘導経路を地図画像上に重ね合わせて表示部26に表示させる。そして、制御部29は自車両の移動に伴って、経路上の分岐点等の特定の案内ポイント手前で、進行方向等の案内情報を表示又は音声で出力し、自車両が目的地までの誘導経路に沿って走行できるように案内する。
【0040】
さらに、本実施形態のナビゲーション装置1では、自車両が地図データに登録されている既存の道路や、既に登録されている学習道路以外の領域を走行した際、そのときの移動軌跡に基づいて新しい学習道路データを作成し、それを地図データ入力部24の補助記憶媒体に学習道路データとして登録する道路学習機能を備える。制御部29は、この補助記憶媒体に登録されている学習道路データと、地図データに既存の道路データとをそれぞれ読出し、1つの地図データとして整合性を取るように加工した上で、地図表示処理や経路案内処理に利用する。
【0041】
具体的には、制御部29は、自車両の走行中に定期的に位置検出器21により現在地を特定し、自車両が地図データに既存の道路又は既に登録済みの学習道路の範囲から離脱した地点から、再び地図データに既存の道路又は登録済みの学習道路へ復帰する地点までの移動軌跡に基づいて、学習道路データを生成する。そして、その生成した学習道路データを補助記憶媒体に記録する。この学習道路データは、既存の道路リンクとの接続点(離脱地点、復帰地点)に相当するノードと、そのノード間を接続するリンクからなる道路の接続状況を示す情報や、離脱地点と復帰地点との間の道路形状を示す座標点の集合から構成される。
【0042】
[第1実施形態]
つぎに、制御部29が実行する分岐案内制御処理の第1実施形態について、図2のフローチャートを参照しながら説明する。この分岐案内制御処理(第1実施形態)は、上述した経路案内処理の実行中、車両が経路案内の対象となる交差点やロータリ、ジャンクション等の分岐点まで所定距離に到達した時点で実行が開始される処理である。
【0043】
制御部29が分岐案内制御処理を開始すると、まず、経路案内対象の分岐点付近の学習道路データに基づき、この分岐点のノードに学習道路リンクが接続しているか否かを判定する(S100)。分岐点に学習道路リンクが接続している場合(S100:YES)、S102に進み、分岐点に学習道路リンクが接続していない場合(S100:NO)、S104に進む。
【0044】
分岐点に学習道路リンクが接続していない場合に進むS104では、既存道路リンクのみを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する各既存道路リンク接続方向に基づき、分岐点からの退出経路(分岐点のノードを通過して次に走行すべき誘導経路)について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。
【0045】
一方、分岐点に学習道路リンクが接続している場合に進むS102では、この分岐点からの退出経路が学習道路リンクであるか否かを判定する。分岐点からの退出経路が学習道路リンクではない場合(S102:NO)、S104に進み、分岐点からの退出経路が学習道路リンクである場合(S102:YES)、S106に進む。
【0046】
分岐点からの退出経路が学習道路リンクではない、すなわち、退出経路が既存道路リンクである場合に進むS104では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する既存道路リンク及び学習道路リンクの中から既存道路リンクの接続方向のみを考慮して、分岐点からの退出経路について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。この場合の進行方向案内の一例を図3(a)に示す。
【0047】
図3(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ1が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ここでは、分岐点からの退出経路が既存道路リンクに該当することを条件に、学習道路リンクQ1の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ1を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。なお、ここでは右折の場合を例示したが、左折の場合でも同様の扱いとなる(以下、他の案内事例についても同様)。
【0048】
図2のフローチャートの説明に戻る。分岐点からの退出経路が学習道路リンクである場合に進むS106では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。ここでは、分岐点に接続する既存道路リンク及び学習道路リンクの各リンクの接続方向に基づき、分岐点からの退出経路について案内すべき進行方向を判定し、その判定結果に基づいて音声出力や画面表示による進行方向の案内を実行する。この場合の進行方向案内の一例を図3(b)に示す。
【0049】
図3(b)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、学習道路リンクQ1へと退出する誘導経路P2を想定している。この分岐点では、退出経路である学習道路リンクQ1、及び、退出経路ではない既存道路リンクE3が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ここでは、分岐点からの退出経路が学習道路リンクに該当することを条件に、学習道路リンクQ1及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ1が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の学習道路リンクQ1への進路方向として、「右奥」を提示する。
【0050】
[第1実施形態の効果]
第1実施形態では、案内対象の分岐点に接続する学習道路リンクが、その分岐点からの退出経路に該当しなければ、その学習道路リンクの存在を進行方向の判定対象に含めずに、既存道路リンクに基づく分岐形状のみを反映した経路案内を行う。このようにすることで、例えば、敷地への導入路や駐車場等に由来する学習道路のように、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けることができる。
【0051】
[第2実施形態]
上述の第1実施形態では、分岐点からの退出経路が学習道路リンクであるか否かを基準に、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断する構成について説明した。これに対し、分岐点に接続している学習道路リンクの信憑性を判断基準とする構成を更に加えてもよい。ここでは、学習道路リンクの信憑性の判断方法として、例1〜例3の3つの事例について説明する。
【0052】
〈例1〉
制御部29が実行する分岐案内制御処理の第2実施形態(例1)について図4のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS200,S202の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0053】
S202で分岐点からの退出経路が学習道路リンクではないと判定した場合(S202:NO)、S204に進む。S204では、学習道路データに基づき、分岐点に接続する学習道路リンクのリンク長が規定値以上であるか否かを判定する。ここでは、分岐点に接続する学習道路リンクの長さを信憑性の判断基準としている。つまり、学習道路リンクのリンク長が規定値以上(信憑性:高)であれば、その学習道路リンクが分岐点の接続道路であると推定し、リンク長が規定値未満(信憑性:低)であれば、その学習道路リンクが接続道路でないと推定する。
【0054】
このように推定する理由として、敷地への導入路や駐車場等、公道ではない場所での走行軌跡に基づく学習道路リンクが、実際の公道での走行軌跡に基づく学習道路リンクよりもリンク長が長くなることが、一般的には考えにくいからである。このような観点により、分岐点に接続している学習道路リンクが十分な長さを持つ道路として登録されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと推定できる。なお、本実施形態では、学習道路リンクが接続している分岐点から半径30mをこの信憑判断の規定値としているが、この値に限らず、種々の規定値を採用することができる。例えば、分岐点からの距離に基づく規定値に限らず、道路学習リンクの道のりそのものを規定値とすることが考えられる。
【0055】
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合(S204:NO)、S206に進み、分岐点に接続する学習道路リンクのリンク長が規定値以上の場合(S204:YES)、S208に進む。
【0056】
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合に進むS206では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図5(a)に示す。
【0057】
図5(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ2が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ2が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。ただし、学習道路リンクQ2は、分岐点から半径30m未満の範囲までしか延出していない。
【0058】
ここでは、分岐点からの退出経路が既存道路リンクに該当し、かつ、学習道路リンクQ2のリンク長が分岐点から半径30m未満であることを条件に、学習道路リンクQ2の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ2が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ2を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0059】
図4のフローチャートの説明に戻る。分岐点に接続する学習道路リンクのリンク長が規定値以上の場合に進むS208では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図5(b)に示す。
【0060】
図5(b)に示す事例において、誘導経路P1は図5(a)の事例と同様である。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ3が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、学習道路リンクQ3は、分岐点から半径30m以上の範囲まで延出している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ3が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0061】
ここでは、分岐点からの退出経路が学習道路リンクでなくとも、学習道路リンクQ3のリンク長が分岐点から半径30m以上であることを条件に、学習道路リンクQ3及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ3が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の既存道路リンクE3への進路方向として、「右手前」を提示する。
【0062】
〈例2〉
つぎに、制御部29が実行する分岐案内制御処理の第2実施形態(例2)について図6のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS300,S302の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0063】
S302で分岐点からの退出経路が学習道路リンクではないと判定した場合(S302:NO)、S304に進む。S304では、学習道路データに基づき、分岐点に接続する学習道路リンクの走行回数が規定回数(例えば、3回)以上であるか否かを判定する。ここでは、分岐点に接続する学習道路リンクの走行回数を信憑性の判断基準としている。つまり、学習道路リンクの走行回数が規定回数以上(信憑性:高)であれば、その学習道路リンクが分岐点の接続道路であると推定し、走行回数が規定回数未満(信憑性:低)であれば、その学習道路リンクが接続道路でないと推定する。
【0064】
このように推定する理由として、目的地までの経路の途中に偶々立寄った敷地や駐車場等、公道ではない場所での走行軌跡に基づいて作成された学習道路リンクは、その後同じ経路を何度も走行することは一般的には考えにくいためである。このような観点により、分岐点に接続している学習道路リンクが何度も利用されている場合、その学習道路リンクは、実際の接続路としての信憑性が高いと推定できる。
【0065】
なお、本実施形態では、規定回数を例えば3回としているが、この回数に限らず、種々の規定回数を採用することができる。分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合(S304:NO)、S306に進み、分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合(S304:YES)、S308に進む。
【0066】
分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合に進むS306では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図7(a)に示す。
【0067】
図7(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ4が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ4が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。また、学習道路リンクQ4は、これまでの累計の走行回数がn回(<規定回数R)であるとする。
【0068】
ここでは、分岐点からの退出経路が既存道路リンクに該当し、かつ、学習道路リンクQ4の走行回数nが規定回数R未満であることを条件に、学習道路リンクQ4の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ4が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ4を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0069】
図6のフローチャートの説明に戻る。分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合に進むS308では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図7(b)に示す。
【0070】
図7(b)に示す事例において、誘導経路P1は図7(a)の事例と同様である。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ5が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。また、学習道路リンクQ5は、これまでの走行回数がN回(≧規定回数R)であるとする。そして、進入経路の既存道路リンクE1側から見て学習道路リンクQ5が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0071】
ここでは、分岐点からの退出経路が学習道路リンクでなくとも、学習道路リンクQ5の走行回数Nが基準回数R以上であることを条件に、学習道路リンクQ5及び既存道路リンクE3の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ5が「右奥」、既存道路リンクE3が「右手前」という位置関係に基づき、退出経路の既存道路リンクE3への進路方向として、「右手前」を提示する。
【0072】
〈例3〉
制御部29が実行する分岐案内制御処理の第2実施形態(例3)について図8のフローチャートを参照しながら説明する。この処理では、学習道路リンクの信憑性の判断基準として、上述の例1,2説明した学習道路リンクのリンク長と走行回数とを併用する。なお、このフローチャートにおけるS400,S402の手順については、上述の第1実施形態におけるS100,S102(図2)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0073】
S402で分岐点からの退出経路が学習道路リンクではないと判定した場合(S402:NO)、S404に進む。S404では、学習道路データに基づき、分岐点に接続する学習道路リンクのリンク長が規定値以上であるか否かを判定する。ここでは、学習道路リンクのリンク長が規定値以上であれば、その学習道路リンクが分岐点の接続道路であると推定し、リンク長が規定値未満であれば、次の走行回数による信憑性の判定に移る。分岐点に接続する学習道路リンクのリンク長が規定値未満の場合(S404:NO)、S406に進み、分岐点に接続する学習道路リンクのリンク長が規定値以上の場合(S404:YES)、S410に進む。
【0074】
分岐点に接続する学習道路リンクのリンク長が規定値未満の場合に進むS406では、学習道路データに基づき、分岐点に接続する学習道路リンクの走行回数が規定回数(例えば、3回)以上であるか否かを判定する。ここでは、学習道路リンクの走行回数が規定回数以上であれば、その学習道路リンクが分岐点の接続道路であると推定し、走行回数が規定回数未満であれば、その学習道路リンクが接続道路でないと推定する。分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合(S406:NO)、S408に進み、分岐点に接続する学習道路リンクの走行回数が規定回数以上の場合(S406:YES)、S410に進む。
【0075】
分岐点に接続する学習道路リンクの走行回数が規定回数未満の場合に進むS408では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例は、上述の図5(a)及び図7(a)に示す事例に準ずる。一方、S404又はS406で肯定判定をした場合に進むS410では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例は、上述の図5(b)又は図7(b)に示す事例に準ずる。
【0076】
[第2実施形態の効果]
もし、分岐点に接続している学習道路リンクが敷地への導入路や駐車場に由来するものでなく、本当に分岐点の接続道路であるならば、その学習道路リンクを含む分岐形状を反映した経路案内の方が実際の分岐形状に即したものとなり、ユーザにとって分かりやすいもこともある。そこで、経路案内対象の分岐点に接続している学習道路がリンク長や走行回数といった信憑性条件を満たすことを条件に、その学習道路リンクを含む分岐形状を反映した経路案内を実行することで、信憑性の劣る学習道路リンクを加味して経路案内をするリスクを低減できる。
【0077】
[第3実施形態]
上述の第2実施形態は、接続道路としての学習道路リンクの信憑性を判断基準とし、分岐点における進行方向の案内に学習道路リンクを反映するか否かを判断するものである。これに対し、退出経路に該当の既存道路リンクと、退出経路ではない学習道路リンクとの位置関係を判断基準とする構成を更に加えてもよい。
【0078】
制御部29が実行する分岐案内制御処理の第3実施形態について図9のフローチャートを参照しながら説明する。なお、このフローチャートにおけるS500〜S506の手順については、上述の第2実施形態(例3)におけるS400〜S406(図8)の手順と同様なので、ここでの説明は省略し、相違点のみを説明する。
【0079】
S504で学習道路リンクのリンク長が規定値以上であると判定した場合(S504:YES)、あるいは、S506で学習道路リンクの走行回数が規定回数以上であると判定した場合(S504:YES)、S508に進む。S508では、学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置しているか否かを判定する。ここでいう直進方向とは、分岐点への進入経路の進行方向に沿って分岐点を直進すると仮定した場合の進行方向のことを指す。そして、学習道路リンクが退出経路よりも直進方向寄りに位置するとは、学習道路リンクと直進方向とのなす角が退出経路と直進方向とのなす角よりも小さい(直進方向に対する接続角度がより小さい)ことを意味する。
【0080】
学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置している場合(S508:YES)、S510に進み、退出経路の既存道路リンクの方が直進方向寄り位置している場合(S508:NO)、S512に進む。
【0081】
学習道路リンクが退出経路の既存道路リンクよりも直進方向寄りに位置している場合に進むS510では、分岐点に接続する学習道路リンクを無視し、既存道路リンクのみを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図10(a)に示す。
【0082】
図10(a)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE3へと退出する誘導経路P1を想定している。この分岐点では、退出経路である既存道路リンクE3、及び、退出経路ではない学習道路リンクQ6が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、学習道路リンクQ6は、退出経路である既存道路リンクE3よりも直進方向寄りに位置している。すなわち、進入経路の既存道路リンクE1側から見て学習道路リンクQ6が「右奥」、既存道路リンクE3が「右手前」という位置関係にある。
【0083】
ここでは、学習道路リンクQ6がリンク長又は走行回数の信憑性条件を満たしており、さらに、この学習道路リンクQ6が、退出経路である既存道路リンクE3よりも直進方向寄りに位置していることを条件に、学習道路リンクQ6の存在を考慮せず、退出経路の進行方向を提示する。すなわち、学習道路リンクQ6が「右奥」、既存道路リンクE3が「右手前」という位置関係であるところを、学習道路リンクQ6を無視し、退出経路の既存道路リンクE3への進路方向として、単純に「右」を提示する。
【0084】
このケースでは、学習道路リンクQ6を無視して進行方向を単純に「右」と提示したとしても、ユーザは一番右手前側にある正しい退出経路(既存道路リンクE3)を容易に認識できると考えられる。なぜならば、このようなケースでユーザが右方向という提示をされた場合、ユーザから見て一番右手前側にある道路を真先に認識する傾向が強いためである。この場合、ユーザが正しい経路を認識することにおける混乱を与える可能性が低い。そこで、たとえ学習道路リンクが信憑性条件を満たしていても、既存道路リンクに対して少なからず信憑性の劣る学習道路リンクを加味して経路案内をするというリスクを避けるために、学習道路リンクを無視して分岐点の進行方向を案内するのである。
【0085】
図9のフローチャートの説明に戻る。学習道路リンクよりも退出経路の既存道路リンクの方が直進方向寄りに位置している場合進むS512では、既存道路リンク及び学習道路リンクを使用する分岐方向判定処理を行う。この場合の進行方向案内の一例を図10(b)に示す。
【0086】
図10(b)に示す事例では、自車両位置C1から既存道路リンクE1を通って案内ポイントである分岐点ノードN1を経由し、既存道路リンクE4へと退出する誘導経路P3を想定している。この分岐点では、退出経路である既存道路リンクE4、及び、退出経路ではない学習道路リンクQ7が、共に分岐点ノードN1への進入経路となる既存道路リンクE1の接続方向に対して右折側に接続している。ただし、退出経路である既存道路リンクE4は、学習道路リンクQ7よりも直進方向寄りに位置している。すなわち、進入経路の既存道路リンクE1側から見て学習道路リンクQ7が「右手前」、既存道路リンクE4が「右奥」という位置関係にある。
【0087】
ここでは、学習道路リンクQ7がリンク長又は走行回数の信憑性条件を満たしており、さらに、この学習道路リンクQ7よりも退出経路である既存道路リンクE4の方が直進方向寄りに位置していることを条件に、学習道路リンクQ7及び既存道路リンクE4の位置関係を反映した態様にて退出経路の進行方向を提示する。すなわち、学習道路リンクQ7が「右手前」、既存道路リンクE4が「右奥」という位置関係に基づき、退出経路の既存道路リンクE4への進路方向として、「右奥」を提示する。
【0088】
このケースでは、仮に、学習道路リンクQ7を無視して単純に「右」と提示したとすると、右折すべき道路が右手前方向の学習道路リンクQ7なのか、右奥方向の既存道路リンクE4なのか、正しい経路がユーザにとって分かりにくい。なぜならば、ユーザが右方向という提示をされた場合、ユーザから見て右奥側にある道路をそれと認識するのは難しいためである。そこで、この場合には、学習道路リンクを無視せず、既存道路リンクの位置と学習道路リンクの位置とを加味した進行方向を提示して分岐点の進行方向を案内するのである。
【0089】
[第3実施形態の効果]
分岐点に接続する学習道路リンクが接続道路としての信憑性条件を満たすか否かの判断に加え、分岐点からの退出経路と学習道路リンクとの間の位置関係に基づいて、学習道路リンクを反映した経路案内を実行するか否かを判断できる。ここでは、学習道路リンクと退出経路の既存道路リンクとで、どちらが分岐点の進入路側から見て直進方向寄りに位置するかという判断基準を採用した。これは、ユーザが退出経路の進行方向を誤認する可能性が低い位置関係(手前か奥か)を考慮した判断基準である。このような判断基準を採用することで、分岐点からの退出経路をユーザに認識させやすい経路案内を実現できる。
【符号の説明】
【0090】
1…ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…距離センサ、22…操作スイッチ群、24…地図データ入力部、25…学習道路データ記憶部、26…表示部、27…音声出力部、29…制御部。
【特許請求の範囲】
【請求項1】
既製地図データと、車両の走行軌跡に基づき前記既製地図データにない道路を検知して取得した学習道路リンクを記録した学習道路データとを用いて経路案内を行う、車両の走行中に用いられるナビゲーション装置であって、
経路案内の対象となる分岐点に前記学習道路データにおける学習道路リンクが接続している場合、経路案内による当該分岐点からの退出経路が前記学習道路リンクに該当するか否かを判断する退出経路判断手段と、
前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断された場合、当該学習道路リンクの存在を反映せず前記既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う経路案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
経路案内の対象となる分岐点に接続している学習道路リンクが、分岐点の接続道路としての所定の信憑性条件に該当するかを判断する信憑性判断手段を更に備え、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当しないと判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項4】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクの走行回数が規定回数未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクの走行回数が規定回数以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項5】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否か、及び、前記分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値未満であり、かつ、前記学習道路リンクの走行回数が規定回数未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値以上であると判断された場合、若しくは、前記学習道路リンクの走行回数が規定回数以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項6】
請求項2ないし請求項5の何れか1項に記載のナビゲーション装置において、
経路案内の対象となる分岐点に接続している学習道路リンクと、前記分岐点からの退出経路となる既存道路リンクとの間の位置関係が、前記分岐における進行方向に関する所定の位置条件に該当するか否かを判断する位置関係判断手段を更に備え、
前記経路案内手段は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された条件下において、前記位置関係判断手段により前記所定の位置条件に該当すると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行い、前記位置関係判断手段により前記所定の位置条件に該当しないと判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置において、
前記位置関係判断手段は、前記所定の位置条件として、前記学習道路リンクが、前記分岐からの退出経路となる既存道路リンクよりも、前記分岐を直進する直進方向寄りに位置しているか否かを判断し、
前記経路案内手段は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された条件下において、前記位置関係判断手段により前記学習道路リンクが前記退出経路の既存道路リンクよりも直進方向寄りに位置すると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行い、前記位置関係判断手段により前記学習道路リンクよりも前記退出経路の既存道路リンクの方が直進方向寄りに位置している判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項1】
既製地図データと、車両の走行軌跡に基づき前記既製地図データにない道路を検知して取得した学習道路リンクを記録した学習道路データとを用いて経路案内を行う、車両の走行中に用いられるナビゲーション装置であって、
経路案内の対象となる分岐点に前記学習道路データにおける学習道路リンクが接続している場合、経路案内による当該分岐点からの退出経路が前記学習道路リンクに該当するか否かを判断する退出経路判断手段と、
前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断された場合、当該学習道路リンクの存在を反映せず前記既製地図データの既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う経路案内手段と、
を備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
経路案内の対象となる分岐点に接続している学習道路リンクが、分岐点の接続道路としての所定の信憑性条件に該当するかを判断する信憑性判断手段を更に備え、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当しないと判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項4】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクの走行回数が規定回数未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクの走行回数が規定回数以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項5】
請求項2に記載のナビゲーション装置において、
前記信憑性判断手段は、前記信憑性条件として、前記分岐点に接続している学習道路リンクのリンク長が規定値以上であるか否か、及び、前記分岐点に接続している学習道路リンクを走行した回数が既定回数以上であるか否かを判断し、
前記経路案内手段は、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当しないと判断され、かつ、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値未満であり、かつ、前記学習道路リンクの走行回数が規定回数未満であると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行う一方、前記退出経路判断手段により前記分岐点からの退出経路が前記学習道路リンクに該当すると判断された場合、又は、前記信憑性判断手段により前記学習道路リンクのリンク長が規定値以上であると判断された場合、若しくは、前記学習道路リンクの走行回数が規定回数以上であると判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項6】
請求項2ないし請求項5の何れか1項に記載のナビゲーション装置において、
経路案内の対象となる分岐点に接続している学習道路リンクと、前記分岐点からの退出経路となる既存道路リンクとの間の位置関係が、前記分岐における進行方向に関する所定の位置条件に該当するか否かを判断する位置関係判断手段を更に備え、
前記経路案内手段は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された条件下において、前記位置関係判断手段により前記所定の位置条件に該当すると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行い、前記位置関係判断手段により前記所定の位置条件に該当しないと判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【請求項7】
請求項6に記載のナビゲーション装置において、
前記位置関係判断手段は、前記所定の位置条件として、前記学習道路リンクが、前記分岐からの退出経路となる既存道路リンクよりも、前記分岐を直進する直進方向寄りに位置しているか否かを判断し、
前記経路案内手段は、前記信憑性判断手段により前記学習道路リンクが前記信憑性条件に該当すると判断された条件下において、前記位置関係判断手段により前記学習道路リンクが前記退出経路の既存道路リンクよりも直進方向寄りに位置すると判断された場合、当該学習道路リンクの存在を反映せず前記既存道路リンクのみを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行い、前記位置関係判断手段により前記学習道路リンクよりも前記退出経路の既存道路リンクの方が直進方向寄りに位置している判断された場合、当該学習道路リンク及び前記既存道路リンクを反映した態様にて当該分岐点の退出経路への進行方向を提示する経路案内を行うこと
を特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−113677(P2013−113677A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259281(P2011−259281)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]