
ナビゲーション装置
【課題】所定量のバッテリ残量が残るように充電区間を通過する経路を探索する。
【解決手段】ナビゲーション装置は、現在地から目的地までの経路であって、移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が設定された目標バッテリ残量以上である経路を探索する。
【解決手段】ナビゲーション装置は、現在地から目的地までの経路であって、移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が設定された目標バッテリ残量以上である経路を探索する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、バッテリの電力を動力源とする移動体(例えば、電気自動車(Electric Vehicle))に搭載されるナビゲーション装置の経路探索に関する。
【背景技術】
【0002】
ナビゲーション装置は、目的地の設定を受け付けて当該目的地までの経路を探索し、探索された経路を表示してユーザを目的地まで案内する(例えば、特許文献1)。
【0003】
また、経由地の設定をユーザから受け付けて、当該経由地を経由して目的地へ到達する経路を探索するナビゲーション装置もある。
【0004】
一方で、近年では、内燃機関を動力源とするのではなく、バッテリの電力を動力源とする移動体(例えば、電気自動車)が普及してきている。
【0005】
電気自動車は、例えば、充電スタンド(「充電ステーション」ともいう。)、駐車場、家庭の駐車場などに設置された充電装置にケーブル等を接続することにより、バッテリを充電する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−71539
【発明の概要】
【発明が解決しようとする課題】
【0007】
電気自動車の充電方法としては、上記のように充電装置にケーブルを接続する方法の他に、ケーブルを使用しない無接点(無接続)で充電を行う方法があり、将来的に実用化が検討されている。この方法では、例えば、無接点充電可能な充電装置を道路に敷設し、当該道路(以下、「充電区間」ともいう。)上を電気自動車が走行することにより該電気自動車のバッテリの充電をすることができる。
【0008】
一方で、充電スタンドや充電区間などの充電設備が十分に整っていない状況では、例えば、電気自動車が目的地に到着した時点でバッテリ残量が十分でない場合に、当該目的地からさらに移動しようとしても、途中でバッテリ残量がなくなるおそれがある。このような事態は、目的地に到着する前には、ユーザは簡単に予測することができない。
【0009】
そこで、本発明は、所定量のバッテリ残量が残るように充電区間を通過する経路を探索することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため本発明は、ナビゲーション装置であって、現在地から目的地までの経路であって、移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が設定された目標バッテリ残量以上である経路を探索する。より具体的には、以下のとおりである。
【0011】
上記の課題を解決するための本発明の一態様は、バッテリの電力を動力源とする移動体に搭載されるナビゲーション装置であって、目的地を設定する手段と、前記目的地への到着時の目標バッテリ残量を設定する設定手段と、現在地を取得する手段と、前記現在地から前記目的地までの経路であって、前記移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が前記目標バッテリ残量以上である経路、を探索する経路探索手段と、探索された経路のうち一の経路を設定する経路設定手段と、を有する、ことを特徴とする。
【0012】
ここで、前記経路探索手段は、前記現在地における前記移動体のバッテリ残量と、前記充電リンクを少なくとも一以上通過する経路に含まれる前記充電リンクに対応する予測バッテリ充電量と、当該経路に含まれる前記充電区間以外の通常リンクに対応する予測バッテリ消費量とを取得し、これらの情報を用いて前記経路の前記予測バッテリ残量を算出してもよい。
【0013】
また、前記ナビゲーション装置は、設定された経路に含まれる前記通常リンクを前記移動体が通過した場合に、当該通過した通常リンクの実際のバッテリ消費量を取得する手段と、前記実際のバッテリ消費量が、経路探索の際に予測された前記通過した通常リンクの予測バッテリ消費量を超えるか否かを判定する手段と、を有し、前記経路探索手段は、前記実際のバッテリ消費量が前記予測バッテリ消費量を超える場合に、経路の再探索を行ってもよい。
【0014】
また、前記ナビゲーション装置は、渋滞情報を取得する手段と、設定された経路に含まれる前記充電リンクが、前記渋滞情報が示す渋滞区間に含まれる又は前記渋滞区間を含むか否かを判定する手段と、を有し、前記経路探索手段は、前記充電リンクが前記渋滞区間に含まれる又は前記渋滞区間を含む場合に、経路の再探索を行ってもよい。
【0015】
また、前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクを少なくとも含む経路を再探索する、ことを特徴としてもよい。
【0016】
また、前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクの予測バッテリ充電量を増加させてもよい。
【0017】
また、前記ナビゲーション装置は、設定された経路に含まれる前記充電リンクを前記移動体が通過した場合に、当該通過した充電リンクの実際のバッテリ充電量を取得する手段と、前記実際のバッテリ充電量が、経路探索の際に予測された前記通過した充電リンクの予測バッテリ充電量を超えるか否かを判定する手段と、を有し、前記経路探索手段は、前記実際のバッテリ充電量が前記予測バッテリ充電量を超える場合に、経路の再探索を行ってもよい。
【0018】
また、前記経路探索手段は、複数の探索された経路のうち、前記予測バッテリ残量が前記目標バッテリ残量に最も近い経路を選択してもよい。
【0019】
また、前記経路探索手段は、複数の探索された経路のうち、前記目的地までのコストが最小の経路を選択してもよい。
【0020】
また、前記ナビゲーション装置は、前記通常リンク及び前記充電リンクの属性に応じて、前記通常リンクの予測バッテリ消費量及び前記充電リンクの予測バッテリ充電量を補正する補正手段を有してもよい。
【0021】
また、前記属性は、渋滞の有無、又は渋滞の混雑度であり、前記補正手段は、渋滞が有る場合、又は渋滞の混雑度が増加するのに応じて、前記予測バッテリ消費量及び前記予測バッテリ充電量を増加させてもよい。
【発明の効果】
【0022】
本発明によれば、所定量のバッテリ残量が残るように充電区間を通過する経路を探索する。
【図面の簡単な説明】
【0023】
【図1】図1は、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略図である。
【図2】図2は、地図DBの構成の一例を示す図である。
【図3】図3は、主制御部の機能構成の一例を示す図である。
【図4】図4は、経路探索処理の一例を示すフロー図である。
【図5】図5は、経路探索処理の一例を説明する図である。
【図6】図6は、第一変形例に係る経路再探索処理の一例を示すフロー図である。
【図7】図7は、第一変形例に係る経路再探索処理の一例を説明する図である。
【図8】図8は、第二変形例に係る経路再探索処理の一例を示すフロー図である。
【図9】図9は、第二変形例に係る経路再探索処理の一例を説明する図である。
【図10】図10は、第三変形例に係る経路再探索処理の一例を示すフロー図である。
【図11】図11は、第三変形例に係る経路再探索処理の一例を説明する図である。
【発明を実施するための形態】
【0024】
以下、本発明の第一実施形態の一例について、図面を参照して説明する。
【0025】
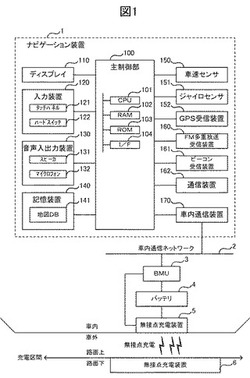
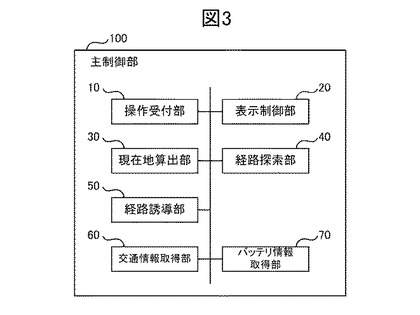
図1は、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略図である。
【0026】
本実施形態では、ナビゲーション装置1は、バッテリ4に蓄えられた電力を動力源として走行する電気自動車に搭載されるものとする。また、特定の道路上に無接点充電のための充電装置が敷設されたインフラ(インフラストラクチャー)(不図示)が整っているものとする。すなわち、電気自動車は、充電区間を走行しながらバッテリ4の充電をすることができる。
【0027】
電気自動車は、車内通信ネットワーク2と、BMU(Battery Management Unit)3と、バッテリ4と、無接点充電装置5とを備える。ナビゲーション装置1は、車内通信ネットワーク2に接続され、BMU3と通信することができる。
【0028】
電気自動車においては、例えば、バッテリ4に蓄えられた電力は、インバータ(不図示)を介してモータ(不図示)に供給される。そして、その電力によってモータが駆動され、その駆動力によって車両が走行する。また、バッテリ4に蓄えられた電力は、コンバータ(不図示)により所定の電圧に変換されて、各種の電子部品(ナビゲーション装置1、BMU3等を含む。)にも供給される。
【0029】
バッテリ4は、例えば、電気自動車側に設けられた無接点充電装置5と接続されており、当該無接点充電装置5を介して、充電区間である道路に設けられた無接点充電装置6からの電力の供給を受ける。無接点充電装置5は、無接点充電装置6と所定距離以内に近付いた場合に、電力を受信してバッテリ4を充電する。
【0030】
車内通信ネットワーク2は、例えば、CAN(Controller Area Network)やFlexRay(登録商標)などの規格に準拠したネットワークであり、車内の各ユニットや各電子部品間の通信を提供する。
【0031】
BMU3は、バッテリ4の充放電の制御を行うユニットである。BMU3は、例えば、バッテリ4の電圧、電流、温度などの状態を監視する。また、バッテリ残量/空き容量などを監視する。また、BMU3は、例えば、無接点充電装置5と接続され、無接点充電装置5を制御してバッテリ4の充電を行う。また、例えば、無接点充電装置5を介して、道路に設けられた無接点充電装置6との接続/切断の検出、充電の開始/終了の検出などを行う。上記の各種情報は、ナビゲーション装置1が受信して使用することができる。
【0032】
ナビゲーション装置1は、主制御部100、ディスプレイ110、入力装置120(タッチパネル121、ハードスイッチ122)、音声入出力装置130(スピーカ131、マイクロフォン132)、記憶装置140、車速センサ150、ジャイロセンサ151、GPS(Global Positioning System)受信装置152、FM多重放送受信装置160、ビーコン受信装置161、通信装置162、及び車内通信装置170、を備える。
【0033】
主制御部100は、所定のプログラムを実行してナビゲーション装置1の各種デバイスを統合的に制御し、ナビゲーション装置としての様々な機能を実現するユニットである。主制御部100は、例えば、各種演算処理を行うCPU(Central Processing Unit)101と、実行対象のプログラムやデータを格納するRAM(Random Access Memory)102と、プログラムやデータを予め格納するROM(Read Only Memory)103と、他のデバイスを制御するためのインタフェース(I/F)104と、を備える。
【0034】
ディスプレイ110は、主制御部100で生成されたグラフィックス情報を表示するユニットである。ディスプレイ110は、例えば、液晶ディスプレイ(Liquid Crystal Display)、有機ELディスプレイ(Electro-Luminescence Display)などで構成される。
【0035】
入力装置120は、ユーザの指示をユーザの操作により受け付けるためのユニットである。入力装置120は、タッチパネル121、ハードスイッチ122などで構成される。
【0036】
タッチパネル121は、例えば、ディスプレイ110の表示面に貼られた透過性のある操作パネルである。タッチパネル121は、例えば、ディスプレイ110に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して主制御部100に出力する。タッチパネル121は、例えば、感圧式または静電式の入力検出素子などにより構成される。ハードスイッチ122は、例えば、ダイヤルスイッチ、スクロールキー、キーボード、ボタンなどである。
【0037】
音声入出力装置130は、音声出力装置としてスピーカ131と、音声入力装置としてマイクロフォン132とを備える。スピーカ131は、主制御部100で生成された音声信号を出力する。マイクロフォン132は、ユーザその他の搭乗者から発せられた音声などのナビゲーション装置1の外部の音声を取得し、主制御部100に出力する。
【0038】
スピーカ131とマイクロフォン132とは、車両の所定の部位に、別個に配置されている。もちろん、スピーカ131とマイクロフォン132とは、一体の筐体に収納されていてもよい。また、ナビゲーション装置1は、スピーカ131およびマイクロフォン132を、それぞれ複数備えることができる。
【0039】
記憶装置140には、主制御部100が各種処理を実行するために必要なプログラムやデータが格納される。これらの情報は、例えば、CPU101によってRAM102上に読み出されて使用される。記憶装置140は、例えば、HDD(Hard Disk Drive)により構成される。記憶装置140は、DVD−ROMなどの記憶媒体を読み出すドライブとして構成してもよい。
【0040】
記憶装置140には、地図DB(Database:データベース)141が格納される。地図DB141は、例えば、ナビゲーション装置1の工場出荷時に、記憶装置140に格納される。地図DB141は、例えば、メッシュ単位、行政区画単位などでデータを更新可能である。更新データは、例えば、通信装置162を介して接続されるネットワーク上のサーバ等から提供される。
【0041】
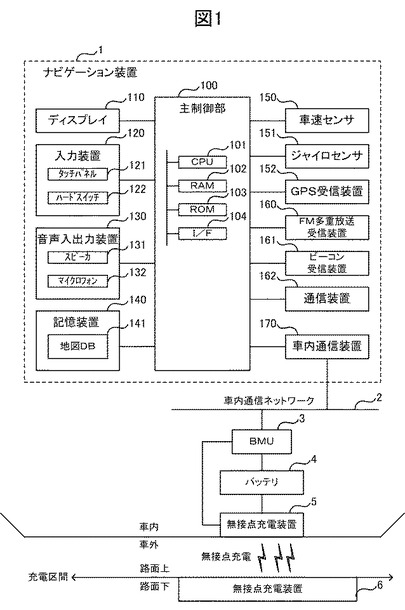
図2を参照して、地図DB141についてより具体的に説明する。図2は、地図DBの構成の一例を示す図である。
【0042】
地図DB141は、地図上の区画された領域であるメッシュの識別コード(メッシュID)1410ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ1411を含む。リンクデータ1411は、リンクの識別コード(リンクID)1412ごとに、当該リンクを構成する2つのノード(開始ノード及び終了ノード)の座標情報1413、当該リンクを含む道路の種別情報1414、当該リンクの長さを示すリンク長情報1415、当該リンクのリンク旅行時間1416、前記2つのノードにそれぞれ接続するリンクのリンクID(接続リンクID)1417、を含む。
【0043】
本実施形態では、道路の種別情報1414は、例えば、有料道路、一般道路などの種別の他に、充電区間道路(以下、単に「充電区間」ともいう。)を示す種別を含む。主制御部100は、道路の種別情報1414を参照することにより、あるリンクが充電区間であるか否かを判別することができる。
【0044】
もちろん、上記の地図DB141の構成は、本願発明の特徴を説明するにあたって主要構成を説明したのであって、上記の構成に限られない。また、一般的な地図DBが備える構成を排除するものではない。例えば、地図DB141には、地図描画データ、施設などの地図構成物の画像データなどが含まれていてもよい。
【0045】
図1に戻って説明を続ける。
【0046】
車速センサ150、ジャイロセンサ151、およびGPS受信装置152は、移動体の現在地などを検出するために使用される。これらの装置は、車内通信装置170及び車内通信ネットワーク2を介して主制御部100に接続されてもよい。
【0047】
車速センサ150は、車速を算出するために用いる車速データを出力するセンサである。ジャイロセンサ151は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するセンサである。GPS受信装置152は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置や進行速度を測定する。このように検出された各種データは、主制御部100に送られて使用される。
【0048】
FM多重放送受信装置160は、FM放送局から送られる電波を受信する。FM多重放送受信装置160は、例えば、概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、災害情報などを受信する。
【0049】
ビーコン受信装置161は、道路に設置されたビーコン装置から送られる電波を受信する装置である。ビーコン受信装置161は、例えば、現況交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0050】
通信装置162は、無線通信によりネットワークと接続する装置である。通信装置162は、ネットワーク上のサーバから、交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0051】
なお、FM放送局、ビーコン、情報提供サーバから送られる各種交通情報には、渋滞情報が含まれているものとする。渋滞情報には、例えば、渋滞の場所を示す情報、渋滞の時間帯を示す情報などが含まれる。渋滞の場所を示す情報には、例えば、渋滞の座標位置や渋滞に関連する道路を特定する情報(道路名、メッシュID、リンクID)などが含まれる。本実施形態では、充電区間道路も、渋滞する場所となり得る。また、渋滞情報には、渋滞の混雑度を示す情報が含まれていてもよい。
【0052】
車内通信装置170は、車内通信ネットワーク2と接続して通信を行う装置である。車内通信装置170は、車内通信ネットワーク2を介してBMU3やECU(Electronic Control Unit)(不図示)などと接続され、BMU3やECUなどから各種情報を受信する。
【0053】
以上が、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略である。ただし、この構成は、本願発明の特徴を説明するにあたって主要構成を説明したのであって、上記の構成に限られない。また、一般的なナビゲーション装置が備える構成を排除するものではない。
【0054】
例えば、ナビゲーション装置1は、持ち運び可能なフラッシュROMなどの記憶媒体の読み書きを行う装置を備えていてもよい。また、例えば、ナビゲーション装置1は、ユーザが持ち運び可能なPND(Portable Navigation Device)であってもよい。
【0055】
また、ナビゲーション装置1は、電気自動車に搭載されるのに限らず、例えば、ハイブリッド電気自動車、電動バイク、電動アシスト自転車などの充電が必要な移動体に搭載されてもよい。
【0056】
次に、上記のナビゲーション装置1により実現される機能について説明する。
【0057】
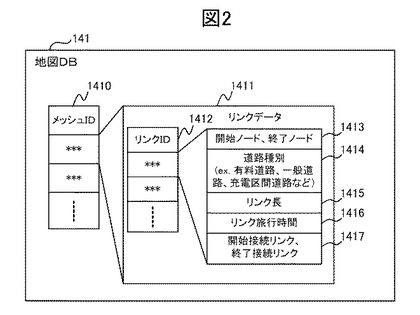
図3は、主制御部の機能構成の一例を示す図である。
【0058】
ナビゲーション装置1の主制御部100は、操作受付部10と、表示制御部20と、現在地算出部30と、経路探索部40と、経路誘導部50と、交通情報取得部60と、バッテリ情報取得部70と、を有する。
【0059】
これらの機能部は、例えば、CPU101が記憶装置140からRAM102にロードした所定のプログラムを実行することにより実現される。この所定のプログラムは、予め(例えば、ナビゲーション装置1の出荷時に)記憶装置140に格納される。もちろん、通信装置162を介してネットワーク上からダウンロードされてインストールおよび/または更新されてもよい。また、DVD−ROM等の記憶媒体から読み出されてインストールおよび/または更新されてもよい。
【0060】
操作受付部10は、入力装置120を介して入力されたユーザの操作を受け付け、その操作内容を解析して、その操作内容に対応する処理が実行されるように他の機能部にその処理を通知する機能部である。また、操作受付部10は、マイクロフォン132を介して入力された音声から、音声認識により対応する操作内容を解析して、その操作内容に対応する処理が実行されるように他の機能部にその処理を通知する機能部である。
【0061】
例えば、操作受付部10は、ユーザの指示を受け付けるためのメニュー項目や機能ボタンを表示するように表示制御部20に指示する。操作受付部10は、メニュー項目や機能ボタンのユーザの操作により、所定の処理(例えば、経路探索など)の指示を受け付けた場合、当該指示を処理する機能部に通知する。
【0062】
表示制御部20は、他の機能部の指示を受け付け、ディスプレイ110にユーザインタフェース画面を表示させるためのグラフィックス情報を生成して出力する機能部である。
【0063】
例えば、表示制御部20は、指定されたスケール、描画方式で、道路、その他の地図構成物や、現在地、経由地、目的地、経路、施設情報といった画像を描画するためのグラフィックス情報を生成する。また、ユーザの指示を受け付けるためのメニュー項目や、操作ボタンなどの画像を描画するためのグラフィックス情報を生成する。
【0064】
現在地算出部30は、現在地を算出する機能部である。
【0065】
例えば、現在地算出部30は、車速センサ150、ジャイロセンサ151、およびGPS受信装置152から出力される情報を用いて、定期的に現在地を算出する。また、算出結果を用いて、マップマッチ処理を行うことにより、相関が最も高い道路(リンク)上に、現在地を合わせ込む。
【0066】
経路探索部40は、経路の探索を行う機能部である。
【0067】
本実施形態の経路探索部40は、目的地と、当該目的地におけるユーザが希望するバッテリの残量(以下、「希望バッテリ残量」又は「目標バッテリ残量」ともいう。)を取得する。そして、目的地に到着時のバッテリ残量が少なくとも前記希望バッテリ残量になるように、充電区間を通過(経由)する、出発地として設定された現在地から目的地までの経路を探索する。
【0068】
例えば、経路探索部40は、操作受付部10を介して経路探索の指示をユーザから受け付けると、目的地と希望バッテリ残量を受け付けるためのユーザインタフェース画面を表示するように表示制御部20に指示する。そして、経路探索部40は、操作受付部10を介して目的地と希望バッテリ残量の設定をユーザから受け付ける。希望バッテリ残量は、例えば、バッテリ4の最大充電量100%に対する比率として受け付けることができる。
【0069】
目的地と希望バッテリ残量を受け付けると、経路探索部40は、現在地算出部30から現在地を取得し、地図DB141を用いて、充電区間を少なくとも一以上通過して目的地に到達する経路を複数探索する。
【0070】
経路探索部40は、経由対象の充電区間として、例えば、現在地と目的地とを結ぶ直線を対角線とする矩形領域、もしくは現在地と目的地を結ぶ直線を半径とする円領域に係るメッシュ内に存在するリンクのうち、道路の種別情報1414が充電区間であるリンクを対象として抽出することができる。経路としては、充電区間を一つ経由するもの、異なる充電区間を二つ経由するもの、異なる充電区間を三つ経由するものなど、充電区間の数及び組み合わせが異なる経路を探索する。現在地から充電区間までの間、充電区間から他の充電区間までの間、及び充電区間から目的地までの間、の経路は、例えば、ダイクストラ法等を用いて、コスト(例えば、旅行距離、旅行時間)が最小となるルートを探索すればよい。
【0071】
もちろん、充電区間を少なくとも一以上通過して目的地に到達する経路の探索方法は、同様の結果を得られれば上記に限られず、他の方法であってもよい。
【0072】
充電区間を一以上通過する経路を複数探索すると、経路探索部40は、各経路について目的地到着時のバッテリ残量を予測する。
【0073】
経路探索部40は、例えば、充電区間でない通常のリンクについて、そのリンク長に応じたバッテリ消費量を算出する。例えば、基準リンク長と、当該基準リンク長に対応する基準バッテリ消費量を予め定めておき、対象のリンクのリンク長の前記基準リンク長に対する比率に基づいて、当該対象リンクのバッテリ消費量を算出する。本実施形態では、バッテリ消費量は、マイナスの値であり、値が小さくなるほどバッテリ消費量が大きいものとする。また、本実施形態では、通常リンクのリンク長が長いほど、バッテリ消費量は大きくなるものとする。
【0074】
例えば、基準リンク長が1、基準バッテリ消費量が−1であるとする。すると、対象リンクのリンク長が2である場合、当該対象リンクのバッテリ消費量は−2となる。
【0075】
また、経路探索部40は、充電区間であるリンクについては、そのリンク長に応じたバッテリ充電量を算出する。例えば、基準充電区間リンク長と、当該基準充電区間リンク長に対応する基準バッテリ充電量を予め定めておき、対象の充電区間リンクのリンク長の前記基準充電区間リンク長に対する比率に基づいて、当該対象の充電区間リンクのバッテリ充電量を算出する。本実施形態では、バッテリ充電量は、プラスの値であり、値が大きくなるほどバッテリ充電量が大きいものとする。また、本実施形態では、充電区間リンクのリンク長が長いほど、バッテリ充電量は大きくなるものとする。
【0076】
例えば、基準充電区間リンク長が1、基準バッテリ充電量が+1であるとする。すると、対象の充電区間リンクのリンク長が2である場合、当該対象の充電区間リンクのバッテリ充電量は、+2となる。
【0077】
また、経路探索部40は、経路を構成する各リンクについて算出されたバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)の合計を求める。そして、バッテリ情報取得部70を介して現在地におけるバッテリ残量(プラスの値)を取得し、算出した合計値に加算する。このようにして、各経路について、目的地到着時のバッテリ残量を予測する。
【0078】
例えば、ある経路が、リンクA(通常区間)、B(通常区間)、C(充電区間)、D(通常区間)により構成されているものとする。リンク長に応じた各リンクのバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)が、A:−2、B:−3、C:+2、D:−1であるものとする。現在地におけるバッテリ残量が10であるとすると、目的地におけるバッテリ残量は、10+(−2−3+2−1)=6となる。
【0079】
各経路について目的地におけるバッテリ残量を算出すると、経路探索部40は、受け付けた希望バッテリ残量と、各経路の目的地におけるバッテリ残量とを比較し、バッテリ残量が希望バッテリ残量以上の経路を特定する。また、特定した経路のうち、希望バッテリ残量との差が最も小さいバッテリ残量を有する経路を選択し、誘導経路として設定する。
【0080】
もちろん、目的地におけるバッテリ残量の算出方法は、上記に限られず、他の方法であってもよい。
【0081】
例えば、交通情報取得部60を介して取得した渋滞情報等の属性を考慮して各リンクのバッテリ消費量及びバッテリ充電量を補正してもよい。この場合、通常リンクが渋滞区間に含まれる又は渋滞区間を含む場合、バッテリ消費量を所定量大きくすることができる。渋滞の混雑度に応じてバッテリ消費量を大きくするようにしてもよい。充電区間リンクが渋滞区間に含まれる又は渋滞区間を含む場合、バッテリ充電量を大きくすることができる。渋滞の混雑度に応じてバッテリ充電量を大きくするようにしてもよい。
【0082】
また、例えば、リンク長に加え又は替えて、リンク旅行時間に基づいて各リンクのバッテリ消費量及びバッテリ充電量を算出してもよい。この場合も、リンク旅行時間が長いほど、通常リンクのバッテリ消費量は大きくなり、充電区間リンクのバッテリ充電量は大きくなる。また、交通情報取得部60を介して取得した渋滞情報等の属性を考慮して各リンクのリンク旅行時間を補正し、それからバッテリ消費量及びバッテリ充電量を算出してもよい。
【0083】
また、例えば、地図DB141に、各リンクについて、リンク長等の属性に応じたバッテリ消費量及びバッテリ充電量を示す情報を予め記憶しておき、目的地におけるバッテリ残量の算出に用いるようにしてもよい。このようにすれば、リンク長などに応じてバッテリ消費量及びバッテリ充電量を算出する必要がなくなる。この場合も、渋滞情報等の属性によりバッテリ消費量及びバッテリ充電量を補正するようにしてもよい。
【0084】
また、例えば、車両の乗車人数に応じて、各リンクのバッテリ消費量及びバッテリ充電量を補正してもよい。この場合、人数が多くなるに従って、バッテリ消費量が大きくなるように補正する。また、人数が多くなるに従って、バッテリ充電量が小さくなるように補正する。なお、乗車人数は、例えば、座席に設けられたセンサの出力に基づいて検出することができる。
【0085】
経路誘導部50は、ナビゲーション処理を行う機能部である。
【0086】
例えば、経路誘導部50は、現在地算出部30から現在地を取得する。また、取得した現在地に基づいて、表示に必要な所定範囲の地図データを地図DB141から読み出す。また、読み出した地図データに取得した現在地に対応する現在地マークを重ねて表示するように、表示制御部20に指示する。また、経路が探索されて設定された場合、経路探索部40から経路情報を取得する。そして、読み出した地図データに取得した経路情報を重ねて表示するように、表示制御部20に指示する。
【0087】
また、例えば、経路誘導部50は、経路情報と現在地とを比較し、交差点等を通過する前に、直進すべきか右左折すべきかを示す音声信号を生成してスピーカ131へ送り、ユーザにルートを案内してもよい。また、進行すべき方向を表示するように表示制御部20に指示して、ユーザにルートを案内してもよい。
【0088】
交通情報取得部60は、ナビゲーション装置1の外部から各種情報を取得する機能部である。
【0089】
例えば、交通情報取得部60は、FM多重放送受信装置160、ビーコン受信装置161、及び通信装置162を介して、交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0090】
バッテリ情報取得部70は、バッテリに関する情報を取得する機能部である。
【0091】
例えば、バッテリ情報取得部70は、車内通信装置170を介して、BMU3から、道路上の充電装置との接続/切断を示す情報、充電の開始/終了を示す情報、バッテリ4の残量/空き容量を示す情報などを取得する。
【0092】
以上の各構成要素は、ナビゲーション装置1の構成を理解容易にするために、主な処理内容に応じて分類したものである。構成要素の分類の仕方や名称によって、本願発明が制限されることはない。ナビゲーション装置1の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。また、各構成要素の処理は、1つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0093】
次に、上記のナビゲーション装置1により実現される特徴的な処理について説明する。
【0094】
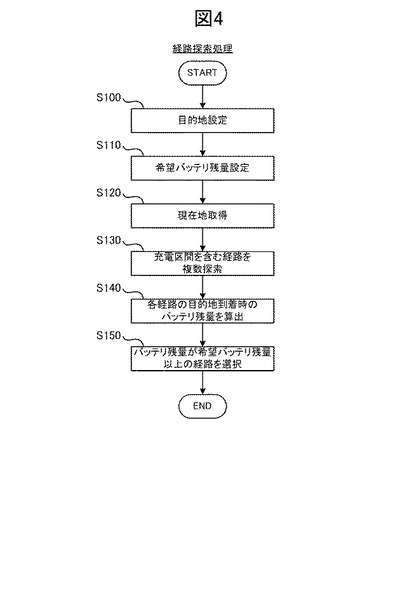
図4は、経路探索処理の一例を示すフロー図である。本フローは、例えば、操作受付部10が、メニュー項目や機能ボタンのユーザの操作により、経路探索の指示を受け付けた場合に開始される。
【0095】
S(ステップ)100では、経路探索部40は、目的地の設定を受け付ける。具体的には、経路探索部40は、例えば、地図を表示するように表示制御部20に指示する。また、操作受付部10を介して地図上から目的地の指定を受け付ける。そして、処理をS110に進める。
【0096】
S110では、経路探索部40は、希望バッテリ残量の設定を受け付ける。具体的には、経路探索部40は、例えば、希望バッテリ残量を入力するための画面を表示するように表示制御部20に指示する。また、操作受付部10を介して希望バッテリ残量を受け付ける。そして、処理を、S120に進める。
【0097】
S120では、経路探索部40は、現在地を取得する。具体的には、経路探索部40は、現在地算出部30から現在地を取得する。そして、処理をS130に進める。なお、現在地以外の出発地の設定をユーザから受け付けるようにしてもよい。
【0098】
S130では、経路探索部40は、充電区間を含む経路を複数探索する。具体的には、経路探索部40は、現在地と目的地の間の所定領域に対応するメッシュに含まれる充電区間を抽出し、充電区間を少なくとも一以上通過してS120で取得した現在地(出発地として設定された現在地)からS100で取得した目的地に到達する経路を複数探索する。そして、処理をS140に進める。
【0099】
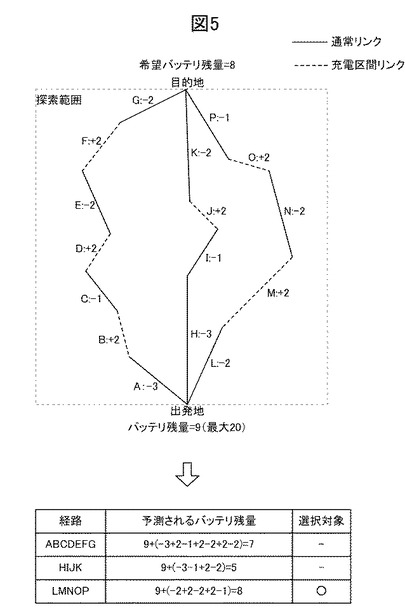
例えば、図5の例では、探索範囲に含まれる充電区間を一以上通過して出発地から目的地に到達する経路として、経路ABCDEFG(充電区間リンク:BDF)と、経路HIJK(充電区間リンク:J)と、経路LMNOP(充電区間リンク:MO)と、が探索される。
【0100】
S140では、経路探索部40は、各経路の目的到着時のバッテリ残量を算出する。具体的には、経路探索部40は、各経路について、当該経路を構成する各リンクのバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)を特定し、それらの合計値を算出し、バッテリ情報取得部70を介して取得した現在地におけるバッテリ残量に当該合計値を加算する。そして、処理をS150に進める。
【0101】
例えば、図5の例では、出発地におけるバッテリ残量が9(最大20)であり、リンクAのバッテリ消費量が−3、リンクBのバッテリ充電量が+2、リンクCのバッテリ消費量が−1、リンクDのバッテリ充電量が+2、リンクEのバッテリ消費量が−2、リンクFのバッテリ充電量が+2、リンクGのバッテリ消費量が−2である。すると、経路ABCDEFG(充電区間リンク:BDF)の予測バッテリ残量は、9+(−3+2−1+2−2+2−2)=7となる。同様に、経路HIJK(充電区間リンク:J)の予測バッテリ残量は、9+(−3−1+2−2)=5となる。経路LMNOP(充電区間リンク:MO)の予測バッテリ残量は、9+(−2+2−2+2−1)=8となる。
【0102】
S150では、経路探索部40は、バッテリ残量が希望バッテリ残量以上の経路を選択する。具体的には、経路探索部40は、S110で取得した希望バッテリ残量と、S140で算出した各経路の目的地におけるバッテリ残量とを比較し、バッテリ残量が希望バッテリ残量以上の経路を特定する。また、特定した経路のうち、希望バッテリ残量との差が最も小さいバッテリ残量を有する経路を選択する。そして、本フローを終了する。
【0103】
もちろん、経路探索部40は、特定した経路のうち、目的地まで最小のコストで到着する経路を選択するようにしてもよい。また、経路探索部40は、バッテリ残量が希望バッテリ残量以上の経路を表示して、ユーザの選択を受け付けるようにしてもよい。バッテリ残量が希望バッテリ残量未満の経路を表示するようにしてもよい。経路を選択すると、経路探索部40は、本フローを終了する。
【0104】
以上のようにして、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が探索される。なお、本フローで選択された経路に基づいて、経路誘導部50によるナビゲーションが行われる。
【0105】
上述のフローの各処理単位は、ナビゲーション装置1の処理を理解容易にするために、主な処理内容に応じて分割したものである。処理単位の分割の仕方や名称によって、本願発明が制限されることはない。ナビゲーション装置1の処理は、処理内容に応じて、さらに多くの処理単位に分割することもできる。また、1つの処理単位がさらに多くの処理を含むように分割することもできる。
【0106】
以上、本発明の第一実施形態の一例について説明した。本実施形態によれば、所定量のバッテリ残量が残るように充電区間を通過する経路を探索することができる。
【0107】
すなわち、本実施形態では、ナビゲーション装置は、ユーザの設定した希望バッテリ残量となるように、充電区間を経由する目的地までの経路を探索する。このような構成により、充電スタンドや充電区間などの充電設備が十分に整っていない状況であっても、目的地からさらに移動するために必要なバッテリ残量を残して、当該目的地に到着することができる。
【0108】
また、充電区間を通過する経路が探索されるので、ユーザは、電気自動車のバッテリ消費状況や走行距離を意識することなく経路探索を行うことができる。また、充電スタンドなどと異なり、充電区間は、電気自動車を停車することなく充電可能であるため、充電による待ち時間をなくす又は減らすとともに、ユーザがスムーズに目的地に移動することができる経路を探索することができる。
【0109】
なお、上記の本発明の実施形態は、本発明の要旨と範囲を例示することを意図し、限定するものではない。多くの代替物、修正および変形例が当業者にとって明らかである。
【0110】
<第一変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過した通常の区間の実際のバッテリ消費量が、予測したバッテリ消費量を超えている場合に、充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路の再探索を行う。
【0111】
具体的には、経路探索部40は、現在地算出部30が出力する現在地と地図DB141と設定された経路情報とを用いて、経路上の各リンクの通過(当該リンクの走行が終了したか否か)を監視する。また、充電区間でない通常リンクについて、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより、実際のバッテリ消費量を算出する。そして、当該リンクの予測バッテリ消費量(経路探索時に算出したバッテリ消費量)と、実際のバッテリ消費量とを比較する。車両が通過したリンクの実際のバッテリ消費量が予測バッテリ消費量を超えている場合、経路を再探索(リルート)する。
【0112】
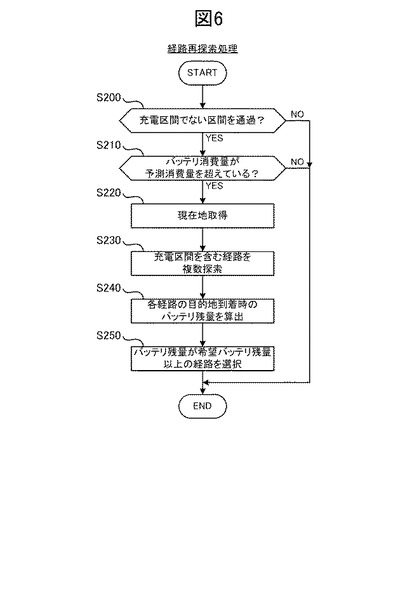
図6は、第一変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0113】
S200では、経路探索部40は、充電区間でない区間を通過したか否かを判定する。具体的には、経路探索部40は、現在地算出部30から現在地を取得し、現在地が充電区間でない通常リンクを走行中であり、かつ、現在地が当該リンクの終点まで到達したかを判定する。現在地が当該リンクの終点まで到達した場合(S200:YES)、処理をS210に進める。その他の場合(S200:NO)、本フローを終了する。
【0114】
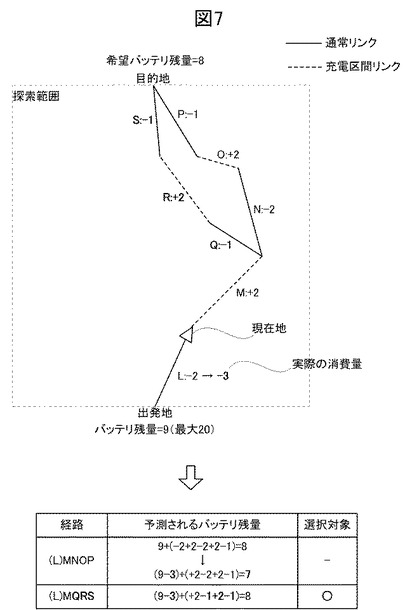
例えば、図7の例では、現在地が通常のリンクLの終点まで到達したと判定される。
【0115】
S210では、経路探索部40は、バッテリ消費量が予測バッテリ消費量を超えているか否かを判定する。具体的には、経路探索部40は、S200で通過したと判定したリンクについて経路探索時に予測されたバッテリ消費量を取得する。また、当該リンクの実際のバッテリ消費量を算出する。実際のバッテリ消費量は、例えば、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより算出できる。それから、経路探索部40は、実際のバッテリ消費量が予測バッテリ消費量を超えているか否かを判定する。実際のバッテリ消費量が予測バッテリ消費量を超えている場合(S210:YES)、処理をS220に進める。実際のバッテリ消費量が予測バッテリ消費量以下である場合(S210:NO)、本フローを終了する。
【0116】
例えば、図7の例では、リンクLの予測バッテリ消費量が−2であり、実際のバッテリ消費量が−3である。そのため、実際のバッテリ消費量が予測バッテリ消費量を超えていると判定される。
【0117】
S220〜S250は、図4のS120〜S150に対応するので説明を省略する。
【0118】
例えば、図7の例では、現在地(リンクLの終点)から目的地までの経路が再探索される。当初設定された経路(L)MNOP(通過済:L)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量を考慮して、(9−3)+(+2−2+2−1)=7となる。一方で、新たに探索された経路(L)MQRS(通過済:L)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量を考慮して、(9−3)+(+2−1+2−1)=8となる。その結果、経路として、経路(L)MQRSが再設定される。
【0119】
以上のようにして、実際のバッテリ消費量に応じて、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が再探索される。また、実際のバッテリ消費量が予測よりも大きくなった場合に、希望バッテリ残量を満たす経路が再探索される。
【0120】
<第二変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過予定の充電区間が渋滞している場合に、当該渋滞中の充電区間を含む経路を探索する。
【0121】
具体的には、経路探索部40は、交通情報取得部60を介して渋滞情報を新しく受信したか否かを判定する。新しく渋滞情報が受信された場合、経路探索部40は、当該受信された渋滞情報に含まれる渋滞区間に通過予定の充電区間リンク(設定された経路に含まれる未通過の充電区間)が含まれるか否か(又は当該充電区間リンクが渋滞区間を含むか否か)を判定する。渋滞区間に通過予定の充電区間リンクが含まれる(又は当該充電区間リンクが渋滞区間を含む)場合、経路探索部40は、当該渋滞中の充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路を探索する。
【0122】
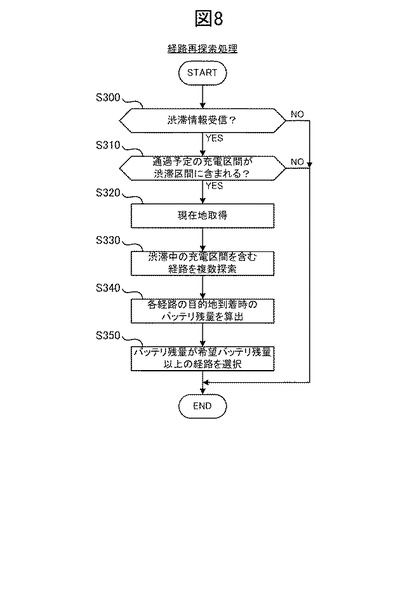
図8は、第二変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0123】
S300では、経路探索部40は、渋滞情報が受信されたか否かを判定する。経路探索部40は、交通情報取得部60により渋滞情報が新しく受信されたか否かを判定する。新しく渋滞情報が受信された場合(S300:YES)、処理をS310に進める。新しく渋滞情報が受信されていない場合(S310:NO)、本フローを終了する。
【0124】
S310では、経路探索部40は、渋滞区間に通過予定の充電区間が含まれるか否かを判定する。具体的には、経路探索部40は、S310で受信された渋滞情報に含まれる渋滞区間に、通過予定の充電区間が含まれるかを判定する。渋滞区間に通過予定の充電区間が含まれる場合(S310:YES)、処理をS320に進める。渋滞区間に通過予定の充電区間が含まれない場合(S310:NO)、本フローを終了する。
【0125】
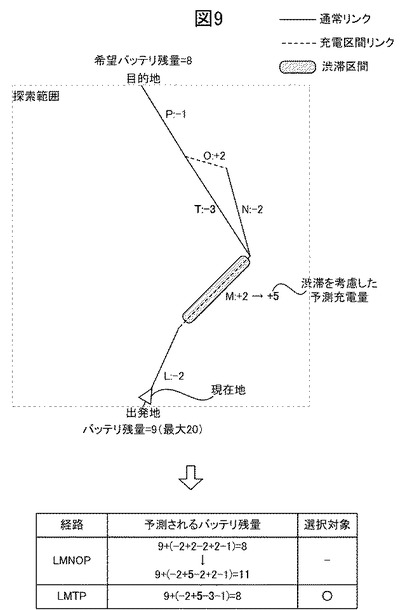
例えば、図9の例のように、通過予定のリンクMが渋滞区間に含まれる場合に、経路の再探索が実行される。
【0126】
S320〜S350は、図4のS120〜S150と基本的に同様であるので説明を省略する。ただし、S330では、経路探索部40は、渋滞区間に含まれる又は渋滞区間を含む充電区間リンクを避けて迂回せずに、当該リンクを通過する経路を含む経路を複数探索する。ここで、渋滞区間に含まれる又は渋滞区間を含む充電区間リンクよりも後ろ(目的地に近い側)に通過予定の他の充電区間がある場合、これらの他の充電区間の少なくとも一以上が回避される経路も結果に含まれるように探索する。また、S340では、渋滞中の充電区間リンクについては、渋滞を考慮したバッテリ充電量を算出する。例えば、渋滞中の充電区間リンクでは、渋滞の混雑度に応じてバッテリ充電量を増加させる。通常リンクについても、渋滞を考慮してバッテリ消費量を増加させてもよい。
【0127】
例えば、図9の例では、渋滞中のリンクMを通過し、現在地(リンクL)から目的地までの経路が再探索される。ここで、リンクMの予測バッテリ充電量は、渋滞の混雑度に応じて、当初の予測消費量+2から+5に変更される。すると、当初設定された経路LMNOPの目的地到着時の予測バッテリ残量は、リンクMの渋滞を考慮して、9+(−2+5−2+2−1)=11となる。一方で、新たに探索された経路LMTPの目的地到着時の予測バッテリ残量は、リンクMの渋滞を考慮して、9+(−2+5−3−1)=8となる。その結果、経路として、経路LMTPが再設定される。
【0128】
以上のようにして、車両が通過予定の充電区間が渋滞している場合に、当該渋滞中の充電区間を含む経路が再探索される。また、渋滞中の充電区間を含む経路を探索することにより、当該充電区間による充電量が増加するため、当初通過予定だった他の充電区間を通過しない(替わりに他の通常区間を通過する)経路を探索することができる。
【0129】
<第三変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過した充電区間の実際のバッテリ充電量が、予測したバッテリ充電量を超えている場合に、充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路の再探索を行う。
【0130】
具体的には、経路探索部40は、現在地算出部30が出力する現在地と地図DB141と設定された経路情報とを用いて、経路上の各リンクの通過(当該リンクの走行が終了したか否か)を監視する。また、充電区間リンクについて、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより、実際のバッテリ充電量を算出する。そして、当該リンクの予測バッテリ充電量(経路探索時に算出したバッテリ充電量)と、実際のバッテリ充電量とを比較する。車両が通過したリンクの実際のバッテリ充電量が予測バッテリ充電量を超えている場合、経路を再探索(リルート)する。
【0131】
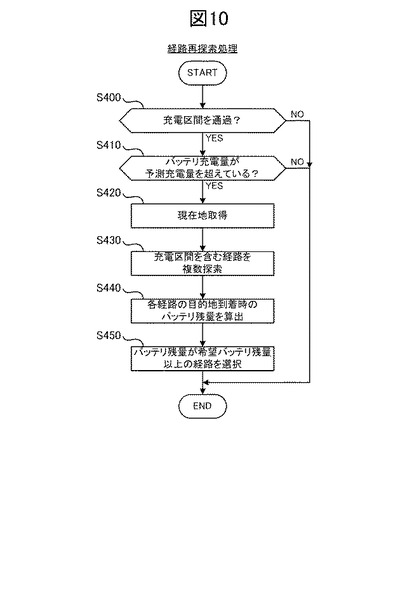
図10は、第三変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0132】
S400では、経路探索部40は、充電区間を通過したか否かを判定する。具体的には、経路探索部40は、現在地算出部30から現在地を取得し、現在地が充電区間リンクを走行中であり、かつ、現在地が当該リンクの終点まで到達したか否かを判定する。現在地が当該リンクの終点まで到達した場合(S400:YES)、処理をS410に進める。その他の場合(S400:NO)、本フローを終了する。
【0133】
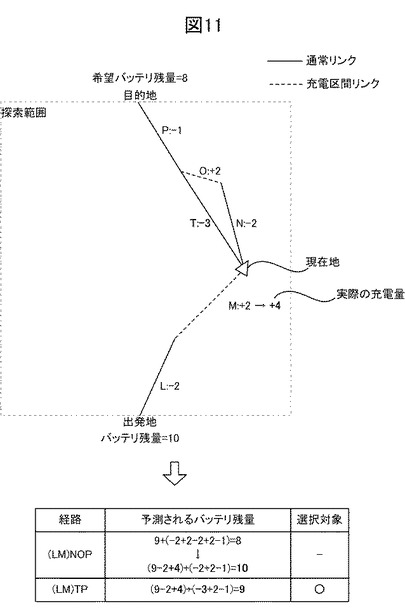
例えば、図11の例では、現在地が充電区間リンクMの終点まで到達したと判定される。
【0134】
S410では、経路探索部40は、バッテリ充電量が予測バッテリ充電量を超えているか否かを判定する。具体的には、経路探索部40は、S400で通過したと判定したリンクについて経路探索時に予測されたバッテリ充電量を取得する。また、当該リンクの実際のバッテリ充電量を算出する。実際のバッテリ充電量は、例えば、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより算出できる。それから、経路探索部40は、実際のバッテリ充電量が予測バッテリ充電量を超えているか否かを判定する。実際のバッテリ充電量が予測バッテリ充電量を超えている場合(S410:YES)、処理をS420に進める。実際のバッテリ充電量が予測バッテリ充電量以下である場合(S410:NO)、本フローを終了する。
【0135】
例えば、図11の例では、リンクMの予測バッテリ充電量が+2であり、実際のバッテリ充電量が+4である。そのため、実際のバッテリ充電量が予測バッテリ充電量を超えていると判定される。
【0136】
S420〜S450は、図4のS120〜S150に対応するので説明を省略する。
【0137】
例えば、図11の例では、現在地(リンクMの終点)から目的地までの経路が再探索される。当初設定された経路(LM)NOP(通過済み:LM)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量とリンクMの実際のバッテリ充電量を考慮して、(9−2+4)+(−2+2−1)=10となる。一方で、新たに探索された経路(LM)TP(通過済み:LM)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量とリンクMの実際のバッテリ充電量を考慮して、(9−2+4)+(−3+2−1)=9となる。その結果、経路として、経路(LM)TPが再設定される。
【0138】
以上のようにして、実際のバッテリ充電量に応じて、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が再探索される。また、実際のバッテリ充電量が予測よりも大きくなった場合に、希望バッテリ残量を満たす経路が再探索される。また、実際に増加した充電量を考慮して経路を再探索するため、当初通過予定だった他の充電区間を通過しない経路を探索することができる。
【0139】
上記の第一実施形態及び各変形例は、いずれか二以上を適宜組み合わせてもよい。
【0140】
なお、上記の第一実施形態及び各変形例では、ナビゲーション装置が単体で経路探索処理、経路再探索処理等を実行しているが、ナビゲーション装置とナビゲーション装置と通信可能なサーバ装置とで処理を分担するようにしてもよい。例えば、ナビゲーション装置が、目的地、希望バッテリ残量、及び現在地をサーバ装置に送信し、サーバ装置は、経路探索処理を行って探索結果をナビゲーション装置に送信し、ナビゲーション装置が探索結果を表示する。このように、本発明は、ナビゲーション装置単体に限られず、ナビゲーション装置と他の装置とを含むシステムによっても実現することができる。
【符号の説明】
【0141】
1:ナビゲーション装置、2:車内通信ネットワーク、4:バッテリ、5:無接点充電装置、6:無接点充電装置、100:主制御部、101:CPU、102:RAM、103:ROM、104:I/F、110:ディスプレイ、120:入力装置、121:タッチパネル、122:ハードスイッチ、130:音声入出力装置、131:スピーカ、132:マイクロフォン、140:記憶装置、141:地図DB、150:車速センサ、151:ジャイロセンサ、152:GPS受信装置、160:FM多重放送受信装置、161:ビーコン受信装置、162:通信装置、170:車内通信装置、1410:メッシュID、1411:リンクデータ、1412:リンクID、1413:ノードの座標情報、1414:道路の種別情報、1415:リンク長情報、1416:リンク旅行時間、1417:接続リンクID、10:操作受付部、20:表示制御部、30:現在地算出部、40:経路探索部、50:経路誘導部、60:交通情報取得部、70:バッテリ情報取得部
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、バッテリの電力を動力源とする移動体(例えば、電気自動車(Electric Vehicle))に搭載されるナビゲーション装置の経路探索に関する。
【背景技術】
【0002】
ナビゲーション装置は、目的地の設定を受け付けて当該目的地までの経路を探索し、探索された経路を表示してユーザを目的地まで案内する(例えば、特許文献1)。
【0003】
また、経由地の設定をユーザから受け付けて、当該経由地を経由して目的地へ到達する経路を探索するナビゲーション装置もある。
【0004】
一方で、近年では、内燃機関を動力源とするのではなく、バッテリの電力を動力源とする移動体(例えば、電気自動車)が普及してきている。
【0005】
電気自動車は、例えば、充電スタンド(「充電ステーション」ともいう。)、駐車場、家庭の駐車場などに設置された充電装置にケーブル等を接続することにより、バッテリを充電する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−71539
【発明の概要】
【発明が解決しようとする課題】
【0007】
電気自動車の充電方法としては、上記のように充電装置にケーブルを接続する方法の他に、ケーブルを使用しない無接点(無接続)で充電を行う方法があり、将来的に実用化が検討されている。この方法では、例えば、無接点充電可能な充電装置を道路に敷設し、当該道路(以下、「充電区間」ともいう。)上を電気自動車が走行することにより該電気自動車のバッテリの充電をすることができる。
【0008】
一方で、充電スタンドや充電区間などの充電設備が十分に整っていない状況では、例えば、電気自動車が目的地に到着した時点でバッテリ残量が十分でない場合に、当該目的地からさらに移動しようとしても、途中でバッテリ残量がなくなるおそれがある。このような事態は、目的地に到着する前には、ユーザは簡単に予測することができない。
【0009】
そこで、本発明は、所定量のバッテリ残量が残るように充電区間を通過する経路を探索することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため本発明は、ナビゲーション装置であって、現在地から目的地までの経路であって、移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が設定された目標バッテリ残量以上である経路を探索する。より具体的には、以下のとおりである。
【0011】
上記の課題を解決するための本発明の一態様は、バッテリの電力を動力源とする移動体に搭載されるナビゲーション装置であって、目的地を設定する手段と、前記目的地への到着時の目標バッテリ残量を設定する設定手段と、現在地を取得する手段と、前記現在地から前記目的地までの経路であって、前記移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が前記目標バッテリ残量以上である経路、を探索する経路探索手段と、探索された経路のうち一の経路を設定する経路設定手段と、を有する、ことを特徴とする。
【0012】
ここで、前記経路探索手段は、前記現在地における前記移動体のバッテリ残量と、前記充電リンクを少なくとも一以上通過する経路に含まれる前記充電リンクに対応する予測バッテリ充電量と、当該経路に含まれる前記充電区間以外の通常リンクに対応する予測バッテリ消費量とを取得し、これらの情報を用いて前記経路の前記予測バッテリ残量を算出してもよい。
【0013】
また、前記ナビゲーション装置は、設定された経路に含まれる前記通常リンクを前記移動体が通過した場合に、当該通過した通常リンクの実際のバッテリ消費量を取得する手段と、前記実際のバッテリ消費量が、経路探索の際に予測された前記通過した通常リンクの予測バッテリ消費量を超えるか否かを判定する手段と、を有し、前記経路探索手段は、前記実際のバッテリ消費量が前記予測バッテリ消費量を超える場合に、経路の再探索を行ってもよい。
【0014】
また、前記ナビゲーション装置は、渋滞情報を取得する手段と、設定された経路に含まれる前記充電リンクが、前記渋滞情報が示す渋滞区間に含まれる又は前記渋滞区間を含むか否かを判定する手段と、を有し、前記経路探索手段は、前記充電リンクが前記渋滞区間に含まれる又は前記渋滞区間を含む場合に、経路の再探索を行ってもよい。
【0015】
また、前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクを少なくとも含む経路を再探索する、ことを特徴としてもよい。
【0016】
また、前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクの予測バッテリ充電量を増加させてもよい。
【0017】
また、前記ナビゲーション装置は、設定された経路に含まれる前記充電リンクを前記移動体が通過した場合に、当該通過した充電リンクの実際のバッテリ充電量を取得する手段と、前記実際のバッテリ充電量が、経路探索の際に予測された前記通過した充電リンクの予測バッテリ充電量を超えるか否かを判定する手段と、を有し、前記経路探索手段は、前記実際のバッテリ充電量が前記予測バッテリ充電量を超える場合に、経路の再探索を行ってもよい。
【0018】
また、前記経路探索手段は、複数の探索された経路のうち、前記予測バッテリ残量が前記目標バッテリ残量に最も近い経路を選択してもよい。
【0019】
また、前記経路探索手段は、複数の探索された経路のうち、前記目的地までのコストが最小の経路を選択してもよい。
【0020】
また、前記ナビゲーション装置は、前記通常リンク及び前記充電リンクの属性に応じて、前記通常リンクの予測バッテリ消費量及び前記充電リンクの予測バッテリ充電量を補正する補正手段を有してもよい。
【0021】
また、前記属性は、渋滞の有無、又は渋滞の混雑度であり、前記補正手段は、渋滞が有る場合、又は渋滞の混雑度が増加するのに応じて、前記予測バッテリ消費量及び前記予測バッテリ充電量を増加させてもよい。
【発明の効果】
【0022】
本発明によれば、所定量のバッテリ残量が残るように充電区間を通過する経路を探索する。
【図面の簡単な説明】
【0023】
【図1】図1は、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略図である。
【図2】図2は、地図DBの構成の一例を示す図である。
【図3】図3は、主制御部の機能構成の一例を示す図である。
【図4】図4は、経路探索処理の一例を示すフロー図である。
【図5】図5は、経路探索処理の一例を説明する図である。
【図6】図6は、第一変形例に係る経路再探索処理の一例を示すフロー図である。
【図7】図7は、第一変形例に係る経路再探索処理の一例を説明する図である。
【図8】図8は、第二変形例に係る経路再探索処理の一例を示すフロー図である。
【図9】図9は、第二変形例に係る経路再探索処理の一例を説明する図である。
【図10】図10は、第三変形例に係る経路再探索処理の一例を示すフロー図である。
【図11】図11は、第三変形例に係る経路再探索処理の一例を説明する図である。
【発明を実施するための形態】
【0024】
以下、本発明の第一実施形態の一例について、図面を参照して説明する。
【0025】
図1は、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略図である。
【0026】
本実施形態では、ナビゲーション装置1は、バッテリ4に蓄えられた電力を動力源として走行する電気自動車に搭載されるものとする。また、特定の道路上に無接点充電のための充電装置が敷設されたインフラ(インフラストラクチャー)(不図示)が整っているものとする。すなわち、電気自動車は、充電区間を走行しながらバッテリ4の充電をすることができる。
【0027】
電気自動車は、車内通信ネットワーク2と、BMU(Battery Management Unit)3と、バッテリ4と、無接点充電装置5とを備える。ナビゲーション装置1は、車内通信ネットワーク2に接続され、BMU3と通信することができる。
【0028】
電気自動車においては、例えば、バッテリ4に蓄えられた電力は、インバータ(不図示)を介してモータ(不図示)に供給される。そして、その電力によってモータが駆動され、その駆動力によって車両が走行する。また、バッテリ4に蓄えられた電力は、コンバータ(不図示)により所定の電圧に変換されて、各種の電子部品(ナビゲーション装置1、BMU3等を含む。)にも供給される。
【0029】
バッテリ4は、例えば、電気自動車側に設けられた無接点充電装置5と接続されており、当該無接点充電装置5を介して、充電区間である道路に設けられた無接点充電装置6からの電力の供給を受ける。無接点充電装置5は、無接点充電装置6と所定距離以内に近付いた場合に、電力を受信してバッテリ4を充電する。
【0030】
車内通信ネットワーク2は、例えば、CAN(Controller Area Network)やFlexRay(登録商標)などの規格に準拠したネットワークであり、車内の各ユニットや各電子部品間の通信を提供する。
【0031】
BMU3は、バッテリ4の充放電の制御を行うユニットである。BMU3は、例えば、バッテリ4の電圧、電流、温度などの状態を監視する。また、バッテリ残量/空き容量などを監視する。また、BMU3は、例えば、無接点充電装置5と接続され、無接点充電装置5を制御してバッテリ4の充電を行う。また、例えば、無接点充電装置5を介して、道路に設けられた無接点充電装置6との接続/切断の検出、充電の開始/終了の検出などを行う。上記の各種情報は、ナビゲーション装置1が受信して使用することができる。
【0032】
ナビゲーション装置1は、主制御部100、ディスプレイ110、入力装置120(タッチパネル121、ハードスイッチ122)、音声入出力装置130(スピーカ131、マイクロフォン132)、記憶装置140、車速センサ150、ジャイロセンサ151、GPS(Global Positioning System)受信装置152、FM多重放送受信装置160、ビーコン受信装置161、通信装置162、及び車内通信装置170、を備える。
【0033】
主制御部100は、所定のプログラムを実行してナビゲーション装置1の各種デバイスを統合的に制御し、ナビゲーション装置としての様々な機能を実現するユニットである。主制御部100は、例えば、各種演算処理を行うCPU(Central Processing Unit)101と、実行対象のプログラムやデータを格納するRAM(Random Access Memory)102と、プログラムやデータを予め格納するROM(Read Only Memory)103と、他のデバイスを制御するためのインタフェース(I/F)104と、を備える。
【0034】
ディスプレイ110は、主制御部100で生成されたグラフィックス情報を表示するユニットである。ディスプレイ110は、例えば、液晶ディスプレイ(Liquid Crystal Display)、有機ELディスプレイ(Electro-Luminescence Display)などで構成される。
【0035】
入力装置120は、ユーザの指示をユーザの操作により受け付けるためのユニットである。入力装置120は、タッチパネル121、ハードスイッチ122などで構成される。
【0036】
タッチパネル121は、例えば、ディスプレイ110の表示面に貼られた透過性のある操作パネルである。タッチパネル121は、例えば、ディスプレイ110に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して主制御部100に出力する。タッチパネル121は、例えば、感圧式または静電式の入力検出素子などにより構成される。ハードスイッチ122は、例えば、ダイヤルスイッチ、スクロールキー、キーボード、ボタンなどである。
【0037】
音声入出力装置130は、音声出力装置としてスピーカ131と、音声入力装置としてマイクロフォン132とを備える。スピーカ131は、主制御部100で生成された音声信号を出力する。マイクロフォン132は、ユーザその他の搭乗者から発せられた音声などのナビゲーション装置1の外部の音声を取得し、主制御部100に出力する。
【0038】
スピーカ131とマイクロフォン132とは、車両の所定の部位に、別個に配置されている。もちろん、スピーカ131とマイクロフォン132とは、一体の筐体に収納されていてもよい。また、ナビゲーション装置1は、スピーカ131およびマイクロフォン132を、それぞれ複数備えることができる。
【0039】
記憶装置140には、主制御部100が各種処理を実行するために必要なプログラムやデータが格納される。これらの情報は、例えば、CPU101によってRAM102上に読み出されて使用される。記憶装置140は、例えば、HDD(Hard Disk Drive)により構成される。記憶装置140は、DVD−ROMなどの記憶媒体を読み出すドライブとして構成してもよい。
【0040】
記憶装置140には、地図DB(Database:データベース)141が格納される。地図DB141は、例えば、ナビゲーション装置1の工場出荷時に、記憶装置140に格納される。地図DB141は、例えば、メッシュ単位、行政区画単位などでデータを更新可能である。更新データは、例えば、通信装置162を介して接続されるネットワーク上のサーバ等から提供される。
【0041】
図2を参照して、地図DB141についてより具体的に説明する。図2は、地図DBの構成の一例を示す図である。
【0042】
地図DB141は、地図上の区画された領域であるメッシュの識別コード(メッシュID)1410ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ1411を含む。リンクデータ1411は、リンクの識別コード(リンクID)1412ごとに、当該リンクを構成する2つのノード(開始ノード及び終了ノード)の座標情報1413、当該リンクを含む道路の種別情報1414、当該リンクの長さを示すリンク長情報1415、当該リンクのリンク旅行時間1416、前記2つのノードにそれぞれ接続するリンクのリンクID(接続リンクID)1417、を含む。
【0043】
本実施形態では、道路の種別情報1414は、例えば、有料道路、一般道路などの種別の他に、充電区間道路(以下、単に「充電区間」ともいう。)を示す種別を含む。主制御部100は、道路の種別情報1414を参照することにより、あるリンクが充電区間であるか否かを判別することができる。
【0044】
もちろん、上記の地図DB141の構成は、本願発明の特徴を説明するにあたって主要構成を説明したのであって、上記の構成に限られない。また、一般的な地図DBが備える構成を排除するものではない。例えば、地図DB141には、地図描画データ、施設などの地図構成物の画像データなどが含まれていてもよい。
【0045】
図1に戻って説明を続ける。
【0046】
車速センサ150、ジャイロセンサ151、およびGPS受信装置152は、移動体の現在地などを検出するために使用される。これらの装置は、車内通信装置170及び車内通信ネットワーク2を介して主制御部100に接続されてもよい。
【0047】
車速センサ150は、車速を算出するために用いる車速データを出力するセンサである。ジャイロセンサ151は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するセンサである。GPS受信装置152は、GPS衛星からの信号を受信し、移動体とGPS衛星間の距離とその距離の変化率を3個以上の衛星に対して測定することで、移動体の現在位置や進行速度を測定する。このように検出された各種データは、主制御部100に送られて使用される。
【0048】
FM多重放送受信装置160は、FM放送局から送られる電波を受信する。FM多重放送受信装置160は、例えば、概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、災害情報などを受信する。
【0049】
ビーコン受信装置161は、道路に設置されたビーコン装置から送られる電波を受信する装置である。ビーコン受信装置161は、例えば、現況交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0050】
通信装置162は、無線通信によりネットワークと接続する装置である。通信装置162は、ネットワーク上のサーバから、交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0051】
なお、FM放送局、ビーコン、情報提供サーバから送られる各種交通情報には、渋滞情報が含まれているものとする。渋滞情報には、例えば、渋滞の場所を示す情報、渋滞の時間帯を示す情報などが含まれる。渋滞の場所を示す情報には、例えば、渋滞の座標位置や渋滞に関連する道路を特定する情報(道路名、メッシュID、リンクID)などが含まれる。本実施形態では、充電区間道路も、渋滞する場所となり得る。また、渋滞情報には、渋滞の混雑度を示す情報が含まれていてもよい。
【0052】
車内通信装置170は、車内通信ネットワーク2と接続して通信を行う装置である。車内通信装置170は、車内通信ネットワーク2を介してBMU3やECU(Electronic Control Unit)(不図示)などと接続され、BMU3やECUなどから各種情報を受信する。
【0053】
以上が、本発明の第一実施形態の一例に係るナビゲーション装置のハードウェア構成の概略である。ただし、この構成は、本願発明の特徴を説明するにあたって主要構成を説明したのであって、上記の構成に限られない。また、一般的なナビゲーション装置が備える構成を排除するものではない。
【0054】
例えば、ナビゲーション装置1は、持ち運び可能なフラッシュROMなどの記憶媒体の読み書きを行う装置を備えていてもよい。また、例えば、ナビゲーション装置1は、ユーザが持ち運び可能なPND(Portable Navigation Device)であってもよい。
【0055】
また、ナビゲーション装置1は、電気自動車に搭載されるのに限らず、例えば、ハイブリッド電気自動車、電動バイク、電動アシスト自転車などの充電が必要な移動体に搭載されてもよい。
【0056】
次に、上記のナビゲーション装置1により実現される機能について説明する。
【0057】
図3は、主制御部の機能構成の一例を示す図である。
【0058】
ナビゲーション装置1の主制御部100は、操作受付部10と、表示制御部20と、現在地算出部30と、経路探索部40と、経路誘導部50と、交通情報取得部60と、バッテリ情報取得部70と、を有する。
【0059】
これらの機能部は、例えば、CPU101が記憶装置140からRAM102にロードした所定のプログラムを実行することにより実現される。この所定のプログラムは、予め(例えば、ナビゲーション装置1の出荷時に)記憶装置140に格納される。もちろん、通信装置162を介してネットワーク上からダウンロードされてインストールおよび/または更新されてもよい。また、DVD−ROM等の記憶媒体から読み出されてインストールおよび/または更新されてもよい。
【0060】
操作受付部10は、入力装置120を介して入力されたユーザの操作を受け付け、その操作内容を解析して、その操作内容に対応する処理が実行されるように他の機能部にその処理を通知する機能部である。また、操作受付部10は、マイクロフォン132を介して入力された音声から、音声認識により対応する操作内容を解析して、その操作内容に対応する処理が実行されるように他の機能部にその処理を通知する機能部である。
【0061】
例えば、操作受付部10は、ユーザの指示を受け付けるためのメニュー項目や機能ボタンを表示するように表示制御部20に指示する。操作受付部10は、メニュー項目や機能ボタンのユーザの操作により、所定の処理(例えば、経路探索など)の指示を受け付けた場合、当該指示を処理する機能部に通知する。
【0062】
表示制御部20は、他の機能部の指示を受け付け、ディスプレイ110にユーザインタフェース画面を表示させるためのグラフィックス情報を生成して出力する機能部である。
【0063】
例えば、表示制御部20は、指定されたスケール、描画方式で、道路、その他の地図構成物や、現在地、経由地、目的地、経路、施設情報といった画像を描画するためのグラフィックス情報を生成する。また、ユーザの指示を受け付けるためのメニュー項目や、操作ボタンなどの画像を描画するためのグラフィックス情報を生成する。
【0064】
現在地算出部30は、現在地を算出する機能部である。
【0065】
例えば、現在地算出部30は、車速センサ150、ジャイロセンサ151、およびGPS受信装置152から出力される情報を用いて、定期的に現在地を算出する。また、算出結果を用いて、マップマッチ処理を行うことにより、相関が最も高い道路(リンク)上に、現在地を合わせ込む。
【0066】
経路探索部40は、経路の探索を行う機能部である。
【0067】
本実施形態の経路探索部40は、目的地と、当該目的地におけるユーザが希望するバッテリの残量(以下、「希望バッテリ残量」又は「目標バッテリ残量」ともいう。)を取得する。そして、目的地に到着時のバッテリ残量が少なくとも前記希望バッテリ残量になるように、充電区間を通過(経由)する、出発地として設定された現在地から目的地までの経路を探索する。
【0068】
例えば、経路探索部40は、操作受付部10を介して経路探索の指示をユーザから受け付けると、目的地と希望バッテリ残量を受け付けるためのユーザインタフェース画面を表示するように表示制御部20に指示する。そして、経路探索部40は、操作受付部10を介して目的地と希望バッテリ残量の設定をユーザから受け付ける。希望バッテリ残量は、例えば、バッテリ4の最大充電量100%に対する比率として受け付けることができる。
【0069】
目的地と希望バッテリ残量を受け付けると、経路探索部40は、現在地算出部30から現在地を取得し、地図DB141を用いて、充電区間を少なくとも一以上通過して目的地に到達する経路を複数探索する。
【0070】
経路探索部40は、経由対象の充電区間として、例えば、現在地と目的地とを結ぶ直線を対角線とする矩形領域、もしくは現在地と目的地を結ぶ直線を半径とする円領域に係るメッシュ内に存在するリンクのうち、道路の種別情報1414が充電区間であるリンクを対象として抽出することができる。経路としては、充電区間を一つ経由するもの、異なる充電区間を二つ経由するもの、異なる充電区間を三つ経由するものなど、充電区間の数及び組み合わせが異なる経路を探索する。現在地から充電区間までの間、充電区間から他の充電区間までの間、及び充電区間から目的地までの間、の経路は、例えば、ダイクストラ法等を用いて、コスト(例えば、旅行距離、旅行時間)が最小となるルートを探索すればよい。
【0071】
もちろん、充電区間を少なくとも一以上通過して目的地に到達する経路の探索方法は、同様の結果を得られれば上記に限られず、他の方法であってもよい。
【0072】
充電区間を一以上通過する経路を複数探索すると、経路探索部40は、各経路について目的地到着時のバッテリ残量を予測する。
【0073】
経路探索部40は、例えば、充電区間でない通常のリンクについて、そのリンク長に応じたバッテリ消費量を算出する。例えば、基準リンク長と、当該基準リンク長に対応する基準バッテリ消費量を予め定めておき、対象のリンクのリンク長の前記基準リンク長に対する比率に基づいて、当該対象リンクのバッテリ消費量を算出する。本実施形態では、バッテリ消費量は、マイナスの値であり、値が小さくなるほどバッテリ消費量が大きいものとする。また、本実施形態では、通常リンクのリンク長が長いほど、バッテリ消費量は大きくなるものとする。
【0074】
例えば、基準リンク長が1、基準バッテリ消費量が−1であるとする。すると、対象リンクのリンク長が2である場合、当該対象リンクのバッテリ消費量は−2となる。
【0075】
また、経路探索部40は、充電区間であるリンクについては、そのリンク長に応じたバッテリ充電量を算出する。例えば、基準充電区間リンク長と、当該基準充電区間リンク長に対応する基準バッテリ充電量を予め定めておき、対象の充電区間リンクのリンク長の前記基準充電区間リンク長に対する比率に基づいて、当該対象の充電区間リンクのバッテリ充電量を算出する。本実施形態では、バッテリ充電量は、プラスの値であり、値が大きくなるほどバッテリ充電量が大きいものとする。また、本実施形態では、充電区間リンクのリンク長が長いほど、バッテリ充電量は大きくなるものとする。
【0076】
例えば、基準充電区間リンク長が1、基準バッテリ充電量が+1であるとする。すると、対象の充電区間リンクのリンク長が2である場合、当該対象の充電区間リンクのバッテリ充電量は、+2となる。
【0077】
また、経路探索部40は、経路を構成する各リンクについて算出されたバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)の合計を求める。そして、バッテリ情報取得部70を介して現在地におけるバッテリ残量(プラスの値)を取得し、算出した合計値に加算する。このようにして、各経路について、目的地到着時のバッテリ残量を予測する。
【0078】
例えば、ある経路が、リンクA(通常区間)、B(通常区間)、C(充電区間)、D(通常区間)により構成されているものとする。リンク長に応じた各リンクのバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)が、A:−2、B:−3、C:+2、D:−1であるものとする。現在地におけるバッテリ残量が10であるとすると、目的地におけるバッテリ残量は、10+(−2−3+2−1)=6となる。
【0079】
各経路について目的地におけるバッテリ残量を算出すると、経路探索部40は、受け付けた希望バッテリ残量と、各経路の目的地におけるバッテリ残量とを比較し、バッテリ残量が希望バッテリ残量以上の経路を特定する。また、特定した経路のうち、希望バッテリ残量との差が最も小さいバッテリ残量を有する経路を選択し、誘導経路として設定する。
【0080】
もちろん、目的地におけるバッテリ残量の算出方法は、上記に限られず、他の方法であってもよい。
【0081】
例えば、交通情報取得部60を介して取得した渋滞情報等の属性を考慮して各リンクのバッテリ消費量及びバッテリ充電量を補正してもよい。この場合、通常リンクが渋滞区間に含まれる又は渋滞区間を含む場合、バッテリ消費量を所定量大きくすることができる。渋滞の混雑度に応じてバッテリ消費量を大きくするようにしてもよい。充電区間リンクが渋滞区間に含まれる又は渋滞区間を含む場合、バッテリ充電量を大きくすることができる。渋滞の混雑度に応じてバッテリ充電量を大きくするようにしてもよい。
【0082】
また、例えば、リンク長に加え又は替えて、リンク旅行時間に基づいて各リンクのバッテリ消費量及びバッテリ充電量を算出してもよい。この場合も、リンク旅行時間が長いほど、通常リンクのバッテリ消費量は大きくなり、充電区間リンクのバッテリ充電量は大きくなる。また、交通情報取得部60を介して取得した渋滞情報等の属性を考慮して各リンクのリンク旅行時間を補正し、それからバッテリ消費量及びバッテリ充電量を算出してもよい。
【0083】
また、例えば、地図DB141に、各リンクについて、リンク長等の属性に応じたバッテリ消費量及びバッテリ充電量を示す情報を予め記憶しておき、目的地におけるバッテリ残量の算出に用いるようにしてもよい。このようにすれば、リンク長などに応じてバッテリ消費量及びバッテリ充電量を算出する必要がなくなる。この場合も、渋滞情報等の属性によりバッテリ消費量及びバッテリ充電量を補正するようにしてもよい。
【0084】
また、例えば、車両の乗車人数に応じて、各リンクのバッテリ消費量及びバッテリ充電量を補正してもよい。この場合、人数が多くなるに従って、バッテリ消費量が大きくなるように補正する。また、人数が多くなるに従って、バッテリ充電量が小さくなるように補正する。なお、乗車人数は、例えば、座席に設けられたセンサの出力に基づいて検出することができる。
【0085】
経路誘導部50は、ナビゲーション処理を行う機能部である。
【0086】
例えば、経路誘導部50は、現在地算出部30から現在地を取得する。また、取得した現在地に基づいて、表示に必要な所定範囲の地図データを地図DB141から読み出す。また、読み出した地図データに取得した現在地に対応する現在地マークを重ねて表示するように、表示制御部20に指示する。また、経路が探索されて設定された場合、経路探索部40から経路情報を取得する。そして、読み出した地図データに取得した経路情報を重ねて表示するように、表示制御部20に指示する。
【0087】
また、例えば、経路誘導部50は、経路情報と現在地とを比較し、交差点等を通過する前に、直進すべきか右左折すべきかを示す音声信号を生成してスピーカ131へ送り、ユーザにルートを案内してもよい。また、進行すべき方向を表示するように表示制御部20に指示して、ユーザにルートを案内してもよい。
【0088】
交通情報取得部60は、ナビゲーション装置1の外部から各種情報を取得する機能部である。
【0089】
例えば、交通情報取得部60は、FM多重放送受信装置160、ビーコン受信装置161、及び通信装置162を介して、交通情報、規制情報、SA/PA情報、災害情報などを受信する。
【0090】
バッテリ情報取得部70は、バッテリに関する情報を取得する機能部である。
【0091】
例えば、バッテリ情報取得部70は、車内通信装置170を介して、BMU3から、道路上の充電装置との接続/切断を示す情報、充電の開始/終了を示す情報、バッテリ4の残量/空き容量を示す情報などを取得する。
【0092】
以上の各構成要素は、ナビゲーション装置1の構成を理解容易にするために、主な処理内容に応じて分類したものである。構成要素の分類の仕方や名称によって、本願発明が制限されることはない。ナビゲーション装置1の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。また、各構成要素の処理は、1つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0093】
次に、上記のナビゲーション装置1により実現される特徴的な処理について説明する。
【0094】
図4は、経路探索処理の一例を示すフロー図である。本フローは、例えば、操作受付部10が、メニュー項目や機能ボタンのユーザの操作により、経路探索の指示を受け付けた場合に開始される。
【0095】
S(ステップ)100では、経路探索部40は、目的地の設定を受け付ける。具体的には、経路探索部40は、例えば、地図を表示するように表示制御部20に指示する。また、操作受付部10を介して地図上から目的地の指定を受け付ける。そして、処理をS110に進める。
【0096】
S110では、経路探索部40は、希望バッテリ残量の設定を受け付ける。具体的には、経路探索部40は、例えば、希望バッテリ残量を入力するための画面を表示するように表示制御部20に指示する。また、操作受付部10を介して希望バッテリ残量を受け付ける。そして、処理を、S120に進める。
【0097】
S120では、経路探索部40は、現在地を取得する。具体的には、経路探索部40は、現在地算出部30から現在地を取得する。そして、処理をS130に進める。なお、現在地以外の出発地の設定をユーザから受け付けるようにしてもよい。
【0098】
S130では、経路探索部40は、充電区間を含む経路を複数探索する。具体的には、経路探索部40は、現在地と目的地の間の所定領域に対応するメッシュに含まれる充電区間を抽出し、充電区間を少なくとも一以上通過してS120で取得した現在地(出発地として設定された現在地)からS100で取得した目的地に到達する経路を複数探索する。そして、処理をS140に進める。
【0099】
例えば、図5の例では、探索範囲に含まれる充電区間を一以上通過して出発地から目的地に到達する経路として、経路ABCDEFG(充電区間リンク:BDF)と、経路HIJK(充電区間リンク:J)と、経路LMNOP(充電区間リンク:MO)と、が探索される。
【0100】
S140では、経路探索部40は、各経路の目的到着時のバッテリ残量を算出する。具体的には、経路探索部40は、各経路について、当該経路を構成する各リンクのバッテリ消費量(マイナスの値)又はバッテリ充電量(プラスの値)を特定し、それらの合計値を算出し、バッテリ情報取得部70を介して取得した現在地におけるバッテリ残量に当該合計値を加算する。そして、処理をS150に進める。
【0101】
例えば、図5の例では、出発地におけるバッテリ残量が9(最大20)であり、リンクAのバッテリ消費量が−3、リンクBのバッテリ充電量が+2、リンクCのバッテリ消費量が−1、リンクDのバッテリ充電量が+2、リンクEのバッテリ消費量が−2、リンクFのバッテリ充電量が+2、リンクGのバッテリ消費量が−2である。すると、経路ABCDEFG(充電区間リンク:BDF)の予測バッテリ残量は、9+(−3+2−1+2−2+2−2)=7となる。同様に、経路HIJK(充電区間リンク:J)の予測バッテリ残量は、9+(−3−1+2−2)=5となる。経路LMNOP(充電区間リンク:MO)の予測バッテリ残量は、9+(−2+2−2+2−1)=8となる。
【0102】
S150では、経路探索部40は、バッテリ残量が希望バッテリ残量以上の経路を選択する。具体的には、経路探索部40は、S110で取得した希望バッテリ残量と、S140で算出した各経路の目的地におけるバッテリ残量とを比較し、バッテリ残量が希望バッテリ残量以上の経路を特定する。また、特定した経路のうち、希望バッテリ残量との差が最も小さいバッテリ残量を有する経路を選択する。そして、本フローを終了する。
【0103】
もちろん、経路探索部40は、特定した経路のうち、目的地まで最小のコストで到着する経路を選択するようにしてもよい。また、経路探索部40は、バッテリ残量が希望バッテリ残量以上の経路を表示して、ユーザの選択を受け付けるようにしてもよい。バッテリ残量が希望バッテリ残量未満の経路を表示するようにしてもよい。経路を選択すると、経路探索部40は、本フローを終了する。
【0104】
以上のようにして、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が探索される。なお、本フローで選択された経路に基づいて、経路誘導部50によるナビゲーションが行われる。
【0105】
上述のフローの各処理単位は、ナビゲーション装置1の処理を理解容易にするために、主な処理内容に応じて分割したものである。処理単位の分割の仕方や名称によって、本願発明が制限されることはない。ナビゲーション装置1の処理は、処理内容に応じて、さらに多くの処理単位に分割することもできる。また、1つの処理単位がさらに多くの処理を含むように分割することもできる。
【0106】
以上、本発明の第一実施形態の一例について説明した。本実施形態によれば、所定量のバッテリ残量が残るように充電区間を通過する経路を探索することができる。
【0107】
すなわち、本実施形態では、ナビゲーション装置は、ユーザの設定した希望バッテリ残量となるように、充電区間を経由する目的地までの経路を探索する。このような構成により、充電スタンドや充電区間などの充電設備が十分に整っていない状況であっても、目的地からさらに移動するために必要なバッテリ残量を残して、当該目的地に到着することができる。
【0108】
また、充電区間を通過する経路が探索されるので、ユーザは、電気自動車のバッテリ消費状況や走行距離を意識することなく経路探索を行うことができる。また、充電スタンドなどと異なり、充電区間は、電気自動車を停車することなく充電可能であるため、充電による待ち時間をなくす又は減らすとともに、ユーザがスムーズに目的地に移動することができる経路を探索することができる。
【0109】
なお、上記の本発明の実施形態は、本発明の要旨と範囲を例示することを意図し、限定するものではない。多くの代替物、修正および変形例が当業者にとって明らかである。
【0110】
<第一変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過した通常の区間の実際のバッテリ消費量が、予測したバッテリ消費量を超えている場合に、充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路の再探索を行う。
【0111】
具体的には、経路探索部40は、現在地算出部30が出力する現在地と地図DB141と設定された経路情報とを用いて、経路上の各リンクの通過(当該リンクの走行が終了したか否か)を監視する。また、充電区間でない通常リンクについて、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより、実際のバッテリ消費量を算出する。そして、当該リンクの予測バッテリ消費量(経路探索時に算出したバッテリ消費量)と、実際のバッテリ消費量とを比較する。車両が通過したリンクの実際のバッテリ消費量が予測バッテリ消費量を超えている場合、経路を再探索(リルート)する。
【0112】
図6は、第一変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0113】
S200では、経路探索部40は、充電区間でない区間を通過したか否かを判定する。具体的には、経路探索部40は、現在地算出部30から現在地を取得し、現在地が充電区間でない通常リンクを走行中であり、かつ、現在地が当該リンクの終点まで到達したかを判定する。現在地が当該リンクの終点まで到達した場合(S200:YES)、処理をS210に進める。その他の場合(S200:NO)、本フローを終了する。
【0114】
例えば、図7の例では、現在地が通常のリンクLの終点まで到達したと判定される。
【0115】
S210では、経路探索部40は、バッテリ消費量が予測バッテリ消費量を超えているか否かを判定する。具体的には、経路探索部40は、S200で通過したと判定したリンクについて経路探索時に予測されたバッテリ消費量を取得する。また、当該リンクの実際のバッテリ消費量を算出する。実際のバッテリ消費量は、例えば、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより算出できる。それから、経路探索部40は、実際のバッテリ消費量が予測バッテリ消費量を超えているか否かを判定する。実際のバッテリ消費量が予測バッテリ消費量を超えている場合(S210:YES)、処理をS220に進める。実際のバッテリ消費量が予測バッテリ消費量以下である場合(S210:NO)、本フローを終了する。
【0116】
例えば、図7の例では、リンクLの予測バッテリ消費量が−2であり、実際のバッテリ消費量が−3である。そのため、実際のバッテリ消費量が予測バッテリ消費量を超えていると判定される。
【0117】
S220〜S250は、図4のS120〜S150に対応するので説明を省略する。
【0118】
例えば、図7の例では、現在地(リンクLの終点)から目的地までの経路が再探索される。当初設定された経路(L)MNOP(通過済:L)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量を考慮して、(9−3)+(+2−2+2−1)=7となる。一方で、新たに探索された経路(L)MQRS(通過済:L)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量を考慮して、(9−3)+(+2−1+2−1)=8となる。その結果、経路として、経路(L)MQRSが再設定される。
【0119】
以上のようにして、実際のバッテリ消費量に応じて、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が再探索される。また、実際のバッテリ消費量が予測よりも大きくなった場合に、希望バッテリ残量を満たす経路が再探索される。
【0120】
<第二変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過予定の充電区間が渋滞している場合に、当該渋滞中の充電区間を含む経路を探索する。
【0121】
具体的には、経路探索部40は、交通情報取得部60を介して渋滞情報を新しく受信したか否かを判定する。新しく渋滞情報が受信された場合、経路探索部40は、当該受信された渋滞情報に含まれる渋滞区間に通過予定の充電区間リンク(設定された経路に含まれる未通過の充電区間)が含まれるか否か(又は当該充電区間リンクが渋滞区間を含むか否か)を判定する。渋滞区間に通過予定の充電区間リンクが含まれる(又は当該充電区間リンクが渋滞区間を含む)場合、経路探索部40は、当該渋滞中の充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路を探索する。
【0122】
図8は、第二変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0123】
S300では、経路探索部40は、渋滞情報が受信されたか否かを判定する。経路探索部40は、交通情報取得部60により渋滞情報が新しく受信されたか否かを判定する。新しく渋滞情報が受信された場合(S300:YES)、処理をS310に進める。新しく渋滞情報が受信されていない場合(S310:NO)、本フローを終了する。
【0124】
S310では、経路探索部40は、渋滞区間に通過予定の充電区間が含まれるか否かを判定する。具体的には、経路探索部40は、S310で受信された渋滞情報に含まれる渋滞区間に、通過予定の充電区間が含まれるかを判定する。渋滞区間に通過予定の充電区間が含まれる場合(S310:YES)、処理をS320に進める。渋滞区間に通過予定の充電区間が含まれない場合(S310:NO)、本フローを終了する。
【0125】
例えば、図9の例のように、通過予定のリンクMが渋滞区間に含まれる場合に、経路の再探索が実行される。
【0126】
S320〜S350は、図4のS120〜S150と基本的に同様であるので説明を省略する。ただし、S330では、経路探索部40は、渋滞区間に含まれる又は渋滞区間を含む充電区間リンクを避けて迂回せずに、当該リンクを通過する経路を含む経路を複数探索する。ここで、渋滞区間に含まれる又は渋滞区間を含む充電区間リンクよりも後ろ(目的地に近い側)に通過予定の他の充電区間がある場合、これらの他の充電区間の少なくとも一以上が回避される経路も結果に含まれるように探索する。また、S340では、渋滞中の充電区間リンクについては、渋滞を考慮したバッテリ充電量を算出する。例えば、渋滞中の充電区間リンクでは、渋滞の混雑度に応じてバッテリ充電量を増加させる。通常リンクについても、渋滞を考慮してバッテリ消費量を増加させてもよい。
【0127】
例えば、図9の例では、渋滞中のリンクMを通過し、現在地(リンクL)から目的地までの経路が再探索される。ここで、リンクMの予測バッテリ充電量は、渋滞の混雑度に応じて、当初の予測消費量+2から+5に変更される。すると、当初設定された経路LMNOPの目的地到着時の予測バッテリ残量は、リンクMの渋滞を考慮して、9+(−2+5−2+2−1)=11となる。一方で、新たに探索された経路LMTPの目的地到着時の予測バッテリ残量は、リンクMの渋滞を考慮して、9+(−2+5−3−1)=8となる。その結果、経路として、経路LMTPが再設定される。
【0128】
以上のようにして、車両が通過予定の充電区間が渋滞している場合に、当該渋滞中の充電区間を含む経路が再探索される。また、渋滞中の充電区間を含む経路を探索することにより、当該充電区間による充電量が増加するため、当初通過予定だった他の充電区間を通過しない(替わりに他の通常区間を通過する)経路を探索することができる。
【0129】
<第三変形例>
本変形例では、ナビゲーション装置1は、上記の経路探索処理により設定された経路で経路誘導を開始した後、車両が通過した充電区間の実際のバッテリ充電量が、予測したバッテリ充電量を超えている場合に、充電区間を通過し目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路の再探索を行う。
【0130】
具体的には、経路探索部40は、現在地算出部30が出力する現在地と地図DB141と設定された経路情報とを用いて、経路上の各リンクの通過(当該リンクの走行が終了したか否か)を監視する。また、充電区間リンクについて、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより、実際のバッテリ充電量を算出する。そして、当該リンクの予測バッテリ充電量(経路探索時に算出したバッテリ充電量)と、実際のバッテリ充電量とを比較する。車両が通過したリンクの実際のバッテリ充電量が予測バッテリ充電量を超えている場合、経路を再探索(リルート)する。
【0131】
図10は、第三変形例に係る経路再探索処理の一例を示すフロー図である。本フローは、例えば、図4のフローにより経路が設定されて経路誘導が開始された後、現在地が算出されるなどの周期的なタイミングで開始される。すなわち、経路誘導中に実行される。
【0132】
S400では、経路探索部40は、充電区間を通過したか否かを判定する。具体的には、経路探索部40は、現在地算出部30から現在地を取得し、現在地が充電区間リンクを走行中であり、かつ、現在地が当該リンクの終点まで到達したか否かを判定する。現在地が当該リンクの終点まで到達した場合(S400:YES)、処理をS410に進める。その他の場合(S400:NO)、本フローを終了する。
【0133】
例えば、図11の例では、現在地が充電区間リンクMの終点まで到達したと判定される。
【0134】
S410では、経路探索部40は、バッテリ充電量が予測バッテリ充電量を超えているか否かを判定する。具体的には、経路探索部40は、S400で通過したと判定したリンクについて経路探索時に予測されたバッテリ充電量を取得する。また、当該リンクの実際のバッテリ充電量を算出する。実際のバッテリ充電量は、例えば、当該リンクの走行開始時のバッテリ残量と走行終了時のバッテリ残量を比較することにより算出できる。それから、経路探索部40は、実際のバッテリ充電量が予測バッテリ充電量を超えているか否かを判定する。実際のバッテリ充電量が予測バッテリ充電量を超えている場合(S410:YES)、処理をS420に進める。実際のバッテリ充電量が予測バッテリ充電量以下である場合(S410:NO)、本フローを終了する。
【0135】
例えば、図11の例では、リンクMの予測バッテリ充電量が+2であり、実際のバッテリ充電量が+4である。そのため、実際のバッテリ充電量が予測バッテリ充電量を超えていると判定される。
【0136】
S420〜S450は、図4のS120〜S150に対応するので説明を省略する。
【0137】
例えば、図11の例では、現在地(リンクMの終点)から目的地までの経路が再探索される。当初設定された経路(LM)NOP(通過済み:LM)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量とリンクMの実際のバッテリ充電量を考慮して、(9−2+4)+(−2+2−1)=10となる。一方で、新たに探索された経路(LM)TP(通過済み:LM)の目的地到着時の予測バッテリ残量は、リンクLの実際のバッテリ消費量とリンクMの実際のバッテリ充電量を考慮して、(9−2+4)+(−3+2−1)=9となる。その結果、経路として、経路(LM)TPが再設定される。
【0138】
以上のようにして、実際のバッテリ充電量に応じて、目的地に到着時のバッテリ残量が少なくとも希望バッテリ残量になる経路が再探索される。また、実際のバッテリ充電量が予測よりも大きくなった場合に、希望バッテリ残量を満たす経路が再探索される。また、実際に増加した充電量を考慮して経路を再探索するため、当初通過予定だった他の充電区間を通過しない経路を探索することができる。
【0139】
上記の第一実施形態及び各変形例は、いずれか二以上を適宜組み合わせてもよい。
【0140】
なお、上記の第一実施形態及び各変形例では、ナビゲーション装置が単体で経路探索処理、経路再探索処理等を実行しているが、ナビゲーション装置とナビゲーション装置と通信可能なサーバ装置とで処理を分担するようにしてもよい。例えば、ナビゲーション装置が、目的地、希望バッテリ残量、及び現在地をサーバ装置に送信し、サーバ装置は、経路探索処理を行って探索結果をナビゲーション装置に送信し、ナビゲーション装置が探索結果を表示する。このように、本発明は、ナビゲーション装置単体に限られず、ナビゲーション装置と他の装置とを含むシステムによっても実現することができる。
【符号の説明】
【0141】
1:ナビゲーション装置、2:車内通信ネットワーク、4:バッテリ、5:無接点充電装置、6:無接点充電装置、100:主制御部、101:CPU、102:RAM、103:ROM、104:I/F、110:ディスプレイ、120:入力装置、121:タッチパネル、122:ハードスイッチ、130:音声入出力装置、131:スピーカ、132:マイクロフォン、140:記憶装置、141:地図DB、150:車速センサ、151:ジャイロセンサ、152:GPS受信装置、160:FM多重放送受信装置、161:ビーコン受信装置、162:通信装置、170:車内通信装置、1410:メッシュID、1411:リンクデータ、1412:リンクID、1413:ノードの座標情報、1414:道路の種別情報、1415:リンク長情報、1416:リンク旅行時間、1417:接続リンクID、10:操作受付部、20:表示制御部、30:現在地算出部、40:経路探索部、50:経路誘導部、60:交通情報取得部、70:バッテリ情報取得部
【特許請求の範囲】
【請求項1】
バッテリの電力を動力源とする移動体に搭載されるナビゲーション装置であって、
目的地を設定する手段と、
前記目的地への到着時の目標バッテリ残量を設定する設定手段と、
現在地を取得する手段と、
前記現在地から前記目的地までの経路であって、前記移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が前記目標バッテリ残量以上である経路、を探索する経路探索手段と、
探索された経路のうち一の経路を設定する経路設定手段と、を有する、
ことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記経路探索手段は、
前記現在地における前記移動体のバッテリ残量と、前記充電リンクを少なくとも一以上通過する経路に含まれる前記充電リンクに対応する予測バッテリ充電量と、当該経路に含まれる前記充電区間以外の通常リンクに対応する予測バッテリ消費量とを取得し、これらの情報を用いて前記経路の前記予測バッテリ残量を算出する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1又は2に記載のナビゲーション装置であって、
設定された経路に含まれる前記通常リンクを前記移動体が通過した場合に、当該通過した通常リンクの実際のバッテリ消費量を取得する手段と、
前記実際のバッテリ消費量が、経路探索の際に予測された前記通過した通常リンクの予測バッテリ消費量を超えるか否かを判定する手段と、を有し、
前記経路探索手段は、前記実際のバッテリ消費量が前記予測バッテリ消費量を超える場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項4】
請求1〜3いずれか一項に記載のナビゲーション装置であって、
渋滞情報を取得する手段と、
設定された経路に含まれる前記充電リンクが、前記渋滞情報が示す渋滞区間に含まれる又は前記渋滞区間を含むか否かを判定する手段と、を有し
前記経路探索手段は、前記充電リンクが前記渋滞区間に含まれる又は前記渋滞区間を含む場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項4に記載のナビゲーション装置であって、
前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクを少なくとも含む経路を再探索する、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクの予測バッテリ充電量を増加させる、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項1〜6いずれか一項に記載のナビゲーション装置であって、
設定された経路に含まれる前記充電リンクを前記移動体が通過した場合に、当該通過した充電リンクの実際のバッテリ充電量を取得する手段と、
前記実際のバッテリ充電量が、経路探索の際に予測された前記通過した充電リンクの予測バッテリ充電量を超えるか否かを判定する手段と、を有し、
前記経路探索手段は、前記実際のバッテリ充電量が前記予測バッテリ充電量を超える場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1〜7いずれか一項に記載のナビゲーション装置であって、
前記経路探索手段は、複数の探索された経路のうち、前記予測バッテリ残量が前記目標バッテリ残量に最も近い経路を選択する、
ことを特徴とするナビゲーション装置。
【請求項9】
請求項1〜7いずれか一項に記載のナビゲーション装置であって、
前記経路探索手段は、複数の探索された経路のうち、前記目的地までのコストが最小の経路を選択する、
ことを特徴とするナビゲーション装置。
【請求項10】
請求項1〜9いずれか一項に記載のナビゲーション装置であって、
前記通常リンク及び前記充電リンクの属性に応じて、前記通常リンクの予測バッテリ消費量及び前記充電リンクの予測バッテリ充電量を補正する補正手段を有する、
ことを特徴とするナビゲーション装置。
【請求項11】
請求項10に記載のナビゲーション装置であって、
前記属性は、渋滞の有無、又は渋滞の混雑度であり、
前記補正手段は、渋滞が有る場合、又は渋滞の混雑度が増加するのに応じて、前記予測バッテリ消費量及び前記予測バッテリ充電量を増加させる、
ことを特徴とするナビゲーション装置。
【請求項1】
バッテリの電力を動力源とする移動体に搭載されるナビゲーション装置であって、
目的地を設定する手段と、
前記目的地への到着時の目標バッテリ残量を設定する設定手段と、
現在地を取得する手段と、
前記現在地から前記目的地までの経路であって、前記移動体が走行しながら充電可能な充電区間に対応する充電リンクを少なくとも一以上通過し、当該経路を前記移動体が走行した場合の予測される前記目的地への到着時の予測バッテリ残量が前記目標バッテリ残量以上である経路、を探索する経路探索手段と、
探索された経路のうち一の経路を設定する経路設定手段と、を有する、
ことを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置であって、
前記経路探索手段は、
前記現在地における前記移動体のバッテリ残量と、前記充電リンクを少なくとも一以上通過する経路に含まれる前記充電リンクに対応する予測バッテリ充電量と、当該経路に含まれる前記充電区間以外の通常リンクに対応する予測バッテリ消費量とを取得し、これらの情報を用いて前記経路の前記予測バッテリ残量を算出する、
ことを特徴とするナビゲーション装置。
【請求項3】
請求項1又は2に記載のナビゲーション装置であって、
設定された経路に含まれる前記通常リンクを前記移動体が通過した場合に、当該通過した通常リンクの実際のバッテリ消費量を取得する手段と、
前記実際のバッテリ消費量が、経路探索の際に予測された前記通過した通常リンクの予測バッテリ消費量を超えるか否かを判定する手段と、を有し、
前記経路探索手段は、前記実際のバッテリ消費量が前記予測バッテリ消費量を超える場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項4】
請求1〜3いずれか一項に記載のナビゲーション装置であって、
渋滞情報を取得する手段と、
設定された経路に含まれる前記充電リンクが、前記渋滞情報が示す渋滞区間に含まれる又は前記渋滞区間を含むか否かを判定する手段と、を有し
前記経路探索手段は、前記充電リンクが前記渋滞区間に含まれる又は前記渋滞区間を含む場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項5】
請求項4に記載のナビゲーション装置であって、
前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクを少なくとも含む経路を再探索する、
ことを特徴とするナビゲーション装置。
【請求項6】
請求項5に記載のナビゲーション装置であって、
前記経路探索手段は、前記渋滞区間に含まれる又は前記渋滞区間を含む前記充電リンクの予測バッテリ充電量を増加させる、
ことを特徴とするナビゲーション装置。
【請求項7】
請求項1〜6いずれか一項に記載のナビゲーション装置であって、
設定された経路に含まれる前記充電リンクを前記移動体が通過した場合に、当該通過した充電リンクの実際のバッテリ充電量を取得する手段と、
前記実際のバッテリ充電量が、経路探索の際に予測された前記通過した充電リンクの予測バッテリ充電量を超えるか否かを判定する手段と、を有し、
前記経路探索手段は、前記実際のバッテリ充電量が前記予測バッテリ充電量を超える場合に、経路の再探索を行う、
ことを特徴とするナビゲーション装置。
【請求項8】
請求項1〜7いずれか一項に記載のナビゲーション装置であって、
前記経路探索手段は、複数の探索された経路のうち、前記予測バッテリ残量が前記目標バッテリ残量に最も近い経路を選択する、
ことを特徴とするナビゲーション装置。
【請求項9】
請求項1〜7いずれか一項に記載のナビゲーション装置であって、
前記経路探索手段は、複数の探索された経路のうち、前記目的地までのコストが最小の経路を選択する、
ことを特徴とするナビゲーション装置。
【請求項10】
請求項1〜9いずれか一項に記載のナビゲーション装置であって、
前記通常リンク及び前記充電リンクの属性に応じて、前記通常リンクの予測バッテリ消費量及び前記充電リンクの予測バッテリ充電量を補正する補正手段を有する、
ことを特徴とするナビゲーション装置。
【請求項11】
請求項10に記載のナビゲーション装置であって、
前記属性は、渋滞の有無、又は渋滞の混雑度であり、
前記補正手段は、渋滞が有る場合、又は渋滞の混雑度が増加するのに応じて、前記予測バッテリ消費量及び前記予測バッテリ充電量を増加させる、
ことを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−15462(P2013−15462A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−149491(P2011−149491)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]