
ナビゲーション装置
【課題】運転者の運転特性に基づいて、高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供する。
【解決手段】車両の走行履歴を用いて運転傾向を学習する運転傾向学習部104と、運転傾向学習部104で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定するリンクコスト設定部102と、リンクコスト設定部102で設定したリンクコストと地図情報に基づいて走行経路を探索をする経路探索部103を備え、運転傾向学習部104は、運転傾向を学習する運転学習部104aと、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する回生傾向学習部104bを有する。
【解決手段】車両の走行履歴を用いて運転傾向を学習する運転傾向学習部104と、運転傾向学習部104で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定するリンクコスト設定部102と、リンクコスト設定部102で設定したリンクコストと地図情報に基づいて走行経路を探索をする経路探索部103を備え、運転傾向学習部104は、運転傾向を学習する運転学習部104aと、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する回生傾向学習部104bを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に勾配情報を利用したナビゲーション装置に関する。
【背景技術】
【0002】
道路勾配と走行速度に対応した燃費情報を記録するとともに、現況の交通情報から推定された走行速度と燃費情報とを用いて、燃料消費量の少ない経路を探索するナビゲーション装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−32541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような従来の技術では道路勾配と走行速度による燃費情報を記録し、この情報に基づいて燃料消費量の少ない経路を探索するが、加速や減速に際しての運転者のアクセル操作の傾向や、勾配の変化に応じたアクセル操作の傾向を考慮していないため、エネルギー消費量を高い精度で設定することができない可能性があった。
本発明は上述した状況に鑑みてなされたものであり、運転者の運転特性に基づいて、エネルギー消費量をより高い精度で設定することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明のナビゲーション装置では、車両の走行履歴を用いて運転特性を学習し、その学習結果の運転特性と、走行経路の距離情報および勾配情報に基づき、予測エネルギー消費量によるリンクコストを動的に設定し、ルート探索をする。
【発明の効果】
【0006】
本発明によれば、運転特性特性を勘案して高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施形態としてのナビゲーション装置を表す機能ブロック図である。
【図2】図1のナビゲーション装置における運転傾向の学習処理を表すフローチャートである。
【図3】図1のナビゲーション装置における運動エネルギー回生傾向の学習処理を例示するフローチャートである。
【図4】図1のナビゲーション装置におけるリンクコスト算出処理を例示するフローチャートである。
【図5】図1のナビゲーション装置における、道路区分と車速域の区分とに従った、勾配ごとの、単位エネルギー当りの走行距離の学習を例示する図である。
【図6】図4の処理によるリンクコスト算出結果を例示する図である。
【図7】本発明の第2実施形態としてのナビゲーション装置を表す機能ブロック図である。
【図8】第2実施形態の特徴を説明するための図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明の実施形態について詳述することにより本発明を明らかにする。
尚、以下に説明する本発明の実施形態としてのナビゲーション装置は、回生制動が可能な車両に搭載し、かつ、この車両では、回生エネルギーをバッテリーに回収可能な構成を有するものであることを前提としている。
(ナビゲーション装置の構成)
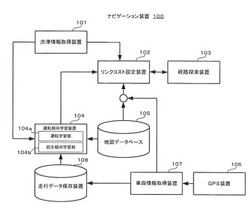
図1は、本発明の第1実施形態としてのナビゲーション装置を表す機能ブロック図である。
図1のナビゲーション装置100は、渋滞情報取得装置101、リンクコスト設定装置102、経路探索装置103、運転傾向学習装置104、地図データベース105、GPS装置106、車両情報取得装置107、および、走行データ保存装置108を有する。
【0009】
渋滞情報取得装置101は、VICS(Vehicle Information and Communication System)等の無線通信によって道路の渋滞情報を取得する。
リンクコスト設定装置102は、勾配、運転傾向、および、走行時間等に依拠して算出するエネルギー消費量に基づいてリンクコストを設定する。
経路探索装置103は、エネルギー消費量を最小化するエネルギー消費量最小経路を探索可能である。尚、モード切り替え操作に応じて、最短時間経路や最短距離経路を探索可能な機能をも併せ持つものであり得る。
【0010】
運転傾向学習装置104は、運転者のアクセル操作の仕方や回生の仕方をも学習する機能部である。本例の運転傾向学習装置104は、運転学習部104aと回生傾向学習部104bとを有する。運転学習部104aはアクセル操作の仕方等の運転者の運転傾向を学習する。回生傾向学習部104bは運転者の回生の仕方に関する傾向を学習する。
地図データベース105は、地図情報を保有するが、本例では、この地図情報は勾配情報をも含んでいる。
【0011】
GPS装置106は、GPS(Global Positioning System)衛星から受信した情報に基づいてこのGPS装置106を搭載した車両等の現在位置を測位する。
車両情報取得装置107は、GPS装置106からの位置情報や、図示しないCAN(Controller Area Network)からの加速度やエネルギー保存量等の車両情報を取得する。
走行データ保存装置108は、車両情報取得装置107が取得した種々の情報を保存する。
尚、リンクコストは、一般にカーナビゲーションシステム等において、出発地点から目的地点までの経路の所要時間、経路長、エネルギー消費量をコスト関数として算出するに際しての、各道路リンクの所要時間、リンク長、エネルギー消費量等である。
【0012】
(運転傾向の学習処理)
図2は、図1のナビゲーション装置における運転学習の処理を表すフローチャートである。運転学習は、アクセル操作の仕方等の運転者の運転傾向の学習である。運転傾向の学習は、図1のナビゲーション装置100の運転傾向学習装置104における運転学習部104aが主体となり、関連部と連携してこの処理を実行する。
【0013】
次に運転傾向の学習に関する処理を、図2のフローチャートを参照して説明する。
先ず、ナビゲーション装置100は、車両が走行した際の、経路、車速、エネルギー保存量、エネルギー消費量、渋滞状況等の車両情報を車両情報取得装置107で取得し、走行データ保存装置108で保存する(ステップS201)。
車両情報取得装置107による車両情報の取得は、GPS装置106や図示しない自律航法装置による測位情報である緯度・経度情報の取得を含む。
【0014】
ステップS201に次いで、当該車両が回生制動可能な車両か否かを判断する(ステップS202)。
ステップS202で回生制動可能な車両であると判断した場合には(ステップS202:Yes)、次いで、エネルギー保存量とエネルギー回生量との各情報を走行データ保存装置108に保存する(ステップS203)。
次いで、当該車両が停止したか否かを判断する(ステップS204)。尚、ステップS202で回生制動可能な車両であると判断した場合には(ステップS202:No)、ステップS203をスキップしてステップS204の判断を実行する。
【0015】
ステップS204で車両が停止したと判断すると(ステップS204:Yes)、この判断を行ったタイミングで当該車両の起動から停止までの一連の走行データを走行データ保存装置108に保存する(ステップS205)。
次いで、走行データ保存装置108に蓄積がある各一連の走行データに係る経路の勾配データおよび勾配ごとの道路区分を地図データベースから取得する(ステップS206)。
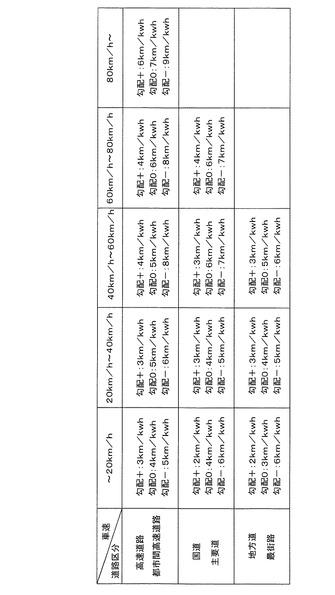
そして、ステップS206で取得した勾配ごとに、道路区分と車速域の区分とに従って、単位エネルギーあたりの走行距離を学習する(ステップS207)。
【0016】
道路区分と車速域の区分とに従った、勾配ごとの、単位エネルギー(kwh)あたりの走行距離(km)を図5に例示したように学習する。
また、ステップS207での学習では、運転者の運転傾向を学習するために勾配変化地点(たとえば+勾配、−勾配)を抽出するが、渋滞による影響を除くため、渋滞時のデータは解析範囲から除外する(ステップS208)。
勾配変化地点では加速・減速・一定速の割合やそれぞれでの運転者の運転傾向を学習する。例えば、+勾配では、加速が70%、減速が10%、一定速が20%であるなどして運転傾向を学習する。また、−勾配では、加速10%、減速70%などであるなどして運転傾向を学習する。
【0017】
勾配変化の閾値としては、例えば、±2%を超えれば勾配変化地点とみなす(ステップS209)。そして、上り勾配および下り勾配の何れに該当するかを判断する(ステップS210)。
ステップS210で上り勾配と判断したときには(ステップS210:上り勾配)、勾配変化前後での車速の変化が±5km/h以内であるか否かを判断する(ステップS211u)。
ステップS211uで、車速の変化が±5km/h以内であると判断したときには(ステップS211u:Yes)一定速の走行とみなして一定速の走行回数としてカウントする(ステップS2uf)。
【0018】
一方、ステップS211uで、車速の変化が+5km/h以上である場合には(ステップS211u:No、+5km以上)、加速の走行とみなして、加速回数としてカウントする(ステップS2ua)。
他方、ステップS211uで、車速の変化が−5km/h以下である場合には(ステップS211u:No、−5km以下)、減速の走行とみなして、減速回数としてカウントする(ステップS2uas)。
ステップS2uf、ステップS2ua、ステップS2uasは、これらを択一的に実行する。そして、これらを択一的に実行の後、次の勾配変化地点の有無を判断する(ステップS213u)。
【0019】
ステップS213uで次の勾配変化地点が有ると判断した場合には(ステップS213u:Yes)、ステップS210に戻る。
一方、ステップS213uで次の勾配変化地点が無いと判断した場合には(ステップS213u:No)、既述のようにカウントした、加速回数、一定回数、および、減速回数のそれぞれについて、カウント回数の総和に対する割合を算出する(ステップS214u)。
【0020】
上述のステップS210で下り勾配と判断したときには(ステップS210:下り勾配)、勾配変化前後での車速の変化が±5km/h以内であるか否かを判断する(ステップS211d)。
ステップS211dで、車速の変化が±5km/h以内であると判断したときには(ステップS211d:Yes)一定速の走行とみなして一定速の走行回数としてカウントする(ステップS2df)。
一方、ステップS211dで、車速の変化が+5km/h以上である場合には(ステップS211d:No、+5km以上)、加速の走行とみなして、加速回数としてカウントする(ステップS2da)。
【0021】
他方、ステップS211dで、車速の変化が−5km/h以下である場合には(ステップS211d:No、−5km以下)、減速の走行とみなして、減速回数としてカウントする(ステップS2das)。
ステップS2df、ステップS2da、ステップS2dasは、これらを択一的に実行する。そして、これらを択一的に実行の後、次の勾配変化地点の有無を判断する(ステップS213d)。
【0022】
ステップS213dで次の勾配変化地点が有ると判断した場合には(ステップS213d:Yes)、ステップS210に戻る。
一方、ステップS213dで次の勾配変化地点が無いと判断した場合には(ステップS213d:No)、既述のようにカウントした、加速回数、一定回数、および、減速回数のそれぞれについて、カウント回数の総和に対する割合を算出する(ステップS214d)。
【0023】
(運動エネルギー回生傾向の学習処理)
運動エネルギーの回生が可能な車両では回生量の学習を行う。次に、この運動エネルギーの回生に関する学習における処理の例を図面を参照して説明する。
回生傾向の学習は、図1のナビゲーション装置100の運転傾向学習装置104における回生傾向学習部104bが主体となり、関連部と連携してこの処理を実行する。
図3は、図1のナビゲーション装置における運動エネルギー回生傾向の学習処理を例示するフローチャートである。
【0024】
走行データ保存装置108に蓄積してある一連の走行データより勾配範囲のデータを抽出する(ステップS301)。次いで、ステップS301で抽出したデータのうち下り勾配範囲のデータを抽出する(ステップS302)。
そして、ステップS302で抽出したデータのうち渋滞時や停止時に該当するデータを当該学習での解析対象範囲から除外する。また、バッテリーのSOCが回生によるエネルギーを蓄積することが出来ない水準域にある時のデータを当該学習での解析対象範囲から除外する(ステップS303)。
【0025】
ステップS303に次いで、下り勾配の測定範囲で車速を既定値と仮定して回収できる予測回収エネルギー量を算出する。この算出に際しては、車両特性に応じた複数通りの既定の車速ごとの性能を表すデータを予め用意しておき、該用意したデータを参照する。また、上記算出以前に取得していた予測回収エネルギー量があれば上記算出した値に加算する(ステップS304)。実際にエネルギー回収した量も積算し、既得のエネルギー回収量がある場合にはこれも積算しておく(ステップS305)。ステップS304で算出したエネルギー量とステップS305で算出したエネルギー量とを比較することによって、運転者が大体何割回生ができているのかを算出する(ステップS306)。
【0026】
(リンクコスト算出処理)
次に、経路探索時に利用するリンクごとのリンクコスト算出処理の例を図面を参照して説明する。
リンクコスト算出は、図1のナビゲーション装置100のリンクコスト設定装置102が主体となり、関連部と連携してこの処理を実行する。
図4は、図1のナビゲーション装置におけるリンクコスト算出処理を例示するフローチャートである。
先ず、リンクの道路区分と渋滞情報より予測走行速度を設定する(ステップS401)。
【0027】
次いで、当該リンク内に既得の補間点があるか否かを判断する(ステップS402)。
補間点がある場合には(ステップS402:Yes)その補間点に関する予測速度・道路勾配・補間点間距離を算出し、或いは、既述のデータを読み出す等して取得する(ステップS403)。
ステップS403に次いで、学習しておいた単位エネルギー当りの走行距離のデータの有無を判断する(ステップS404)。
ステップS404で、学習しておいた単位エネルギー当りの走行距離のデータが有ると判断したときには(ステップS404:Yes)この学習値によりエネルギー消費量を算出する(ステップS405)。
【0028】
一方、ステップS404で、学習しておいた単位エネルギー当りの走行距離のデータが無いと判断したときには(ステップS404:No)、既定の標準的な値を用いてエネルギー消費量を算出する(ステップS406)。
ステップS405またはステップS406の処理を実行の後、既得の補間点またはノードのデータとの比較において勾配が変化しているかを判断する(ステップS407)。
ステップS407で勾配が変化していると判断したときには(ステップS407:Yes)、学習した勾配ごとの運転特性値の有無を判断する(ステップS408)。
【0029】
ステップS408で、学習した勾配ごとの運転特性値が既に存在すると判断したときには(ステップS408:Yes)、運転特性値に合わせてエネルギー消費量に係数を掛けることによってエネルギー消費量を実態に合わせて補正する(ステップS409)。
ステップS409における補正も、運転傾向学習装置104(その運転学習部104a)による機能である。
ステップS409におけるエネルギー消費量に係数を掛ける処理では、例えば、+勾配での加速に関しては、エネルギ消費量を増加させる。増加の程度の具体例としては、勾配変化後の50m分又は補間点間の距離のエネルギー消費量×1.2とする。
【0030】
また、+勾配での減速に関しては、エネルギ消費量を減少させる。減少の程度の具体例としては、勾配変化後の50m分のエネルギー消費量×0.8とする。
一方、−勾配での加速に関しては、エネルギ消費量を増加させる。増加の程度の具体例としては、勾配変化後の50m分のエネルギー消費量×1.1とする。
また、―勾配での減速に関しては、一定速と同じで変化がないものとして扱う。
【0031】
即ち、運転傾向学習部104の運転学習部104aでは、学習により取得している運転傾向に応じてエネルギー消費量に係数を掛けて予測エネルギー消費量を補正する。
ステップS409に次いで、当該車両が下り勾配で運動エネルギーを回生可能であるか否かを判断する(ステップS410)。
ステップS407で、勾配が変化していないと判断したとき、(ステップS407:No)、および、ステップS408で、学習した勾配ごとの運転特性値が存在しないと判断したときににも(ステップS408:No)、上述のステップS410に移行する。
【0032】
下り勾配で運動エネルギーを回生可能であると判断したときには(ステップS410:Yes)、下り勾配部分の距離と予測走行速度より予測回収エネルギー量を算出する(ステップS411)。
ステップS411で予測回収エネルギー量を算出した後、運動エネルギーの回生が学習できているか否かを判断する(ステップS412)。
運動エネルギーの回生が学習できている場合には(ステップS413:Yes)、予測回収エネルギー量に学習した割合を掛ける(ステップS413)。
【0033】
即ち、運転傾向学習部104の回生傾向学習部104bでは、学習により取得している運動エネルギーの回生傾向に応じてエネルギー消費量に係数を掛けて予測回収エネルギー量を補正する。
このステップS413における補正も運転傾向学習部104による機能であるが、特にその回生傾向学習部104bがこのように機能する。
次いで、エネルギー消費量よりも回収エネルギーが多いか否かを判断する(ステップS414)。
【0034】
エネルギー消費量よりも回収エネルギーが多い場合には(ステップS414:Yes)、直前の処理サイクルで取得したエネルギー保存量の予測値または直前のノードにおけるエネルギー保存量の予測値が回生によるエネルギーを回収することが出来ない程度に高い水準域にあるか否かを判断する(ステップS415)。
ステップS415で、エネルギー保存量の予測値が、回生によるエネルギーを回収することが出来ない程度に高い水準域にあると判断したときには(ステップS415:Yes)、当該補間点間での走行によるエネルギー消費量より予測回収エネルギー量の方が現実には大きいとしても、予測回収エネルギー量はエネルギ消費量までとして扱う(ステップS416)。
【0035】
ステップS416で予測回収エネルギー量はエネルギ消費量までとして扱った場合には、エネルギー消費量から予測回収エネルギー量を差し引いた値を補間点間のエネルギ消費量、即ち、補間点間コストとする(ステップS417)。
また、ステップS415で、エネルギー保存量の予測値が回生によるエネルギーを回収することが出来ない水準域未満であると判断した場合にも(ステップS415:No)、ステップS417に移行する。
【0036】
ステップS417に次いで、予測エネルギー消費量からエネルギー消費量を減算した値に回収エネルギー量を加算する(ステップS418)。
他に補間点がなくなり(ステップS402:No)、次のノードまで計算した場合、ステップS418で算出したリンク内補間コストを積算してリンクコストとする(ステップS419)。
ステップS418でのリンクコストの算定対象とするリンクが残っているか否かを判断する(ステップS420)。
リンクコストの算定対象とするリンクが残っていないと判断したときには(ステップS420:No)、補間点リンクコストの積算値をリンクコストとして用いる。
【0037】
ステップS420で、リンクコストの算定対象とするリンクが残っていると判断したときには(ステップS420:Yes)、ステップS401に戻る。
一方、ステップS410で、当該車両が下り勾配で運動エネルギーを回生できないと判断したときにも(ステップS410:No)、ステップS402に移行する。
更に、ステップS414で、エネルギー消費量よりも回収エネルギーが多い場合にも(ステップS414:Yes)ステップS402に移行する。
既述のように、ステップS402で他に補間点がなくなったと判断したときに(ステップS402:No)、ステップS419に移行してリンクコストを得る。
【0038】
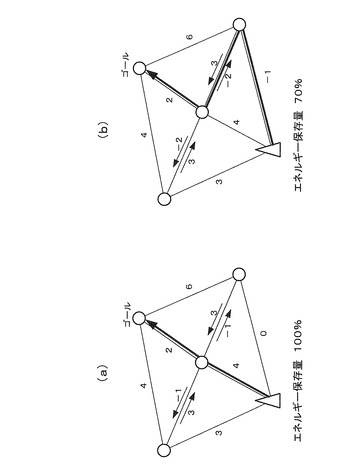
図4のフローチャートを参照して例示したようなリンクコスト算出処理により、例えば図6に示したようにリンクコストを顕在化することができる。
図6(a)はエネルギー保存量が100%である場合のリンクコストである。また、図6(b)はエネルギー保存量が70%である場合のリンクコストである。
図6(a)と図6(b)とを対比して明瞭であるとおり、リンクコストがマイナスであるところがエネルギー保存量に応じてリンクコストが変化していく。また、経路の選び方により予測エネルギー保存量も回生などに依存して変化する。このため、同じリンクについて、走る向きやそれまでの経路に応じて動的にリンクコストが変化する。
【0039】
即ち、図1におけるリンクコスト設定装置102は、リンクコストを設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
上述において、運転傾向学習装置104(その運転学習部104a)が運転傾向学習部対応する。また、リンクコスト設定装置102がリンクコスト設定部に対応する。さらに、経路探索装置103が経路探索部に対応する。
【0040】
(第1実施形態のナビゲーション装置の効果)
(1−1)第1実施形態としてのナビゲーション装置100は、運転傾向学習装置104が車両の走行履歴を用いて運転傾向を学習する。また、リンクコスト設定装置102が運転傾向学習装置104で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定する。さらに、経路探索装置103がリンクコスト設定装置102で設定したリンクコストと地図情報に基づいて走行経路を探索をする。
【0041】
上記(1−1)のナビゲーション装置100における運転傾向学習装置104での学習では、道路勾配の変化とともに、例えば、アクセル操作や加速度の変化に現われる運転傾向を読む。より具体的に例示するなら、上り勾配に入る場合に積極的にアクセルを踏んでいく傾向や、下り勾配でもブレーキをあまり踏まずに位置エネルギーを加速に用いる傾向があるか等を学習する。
従って、上記(1−1)のナビゲーション装置100では、このような学習によって取得した運転特性特性を勘案して高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供できる。
【0042】
(1−2)上記(1−1)のナビゲーション装置100において特に、運転傾向学習装置104の回生傾向学習部104bが、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する。
また、リンクコスト設定装置102は、回生傾向学習部104bによる予測エネルギー回生量の学習結果を用いてリンクコストを動的に設定する。
従って、上記(1−2)のナビゲーション装置100では、運動エネルギーの回生が可能な車両において、下り勾配はエネルギーをほぼ使わず走ることができるだけではなく、運動エネルギーを回生して蓄えることができる場合に、蓄えられる量を算出することができる。このため、運動エネルギーの回生が可能な車両におけるエネルギー消費量をより高い精度で設定することができる。
【0043】
(1−3)上記(1−2)のナビゲーション装置100において特に、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
従って、上記(1−3)のナビゲーション装置100では、例えば、現在のエネルギー保存量に応じて実態に即した予測回収エネルギーの補正値を勘案してリンクごとにリンクコストを動的に設定できる。このため、それぞれのノードで現在時点でのエネルギー保存量を算出することによって、リンクコストをより高い精度で設定することができる。
【0044】
(1−4)運転傾向学習装置104は、学習した運転傾向に基づいて予測エネルギー消費量と予測回収エネルギーを補正し、リンクコスト設定装置102は、当該リンクコストを動的に設定するに際し、前記運転傾向学習装置104が補正した予測エネルギー消費量と予測エネルギー回生量に基づいてリンクコストを動的に設定する。
従って、回生の行えるような勾配であっても、運転傾向によって運動エネルギー回生の可否が分かれるが、その下り勾配での運転傾向の学習結果を反映して運動エネルギー回生の可否を適確に判断することができる。従って、実態に即してより高い精度でリンクコストを設定することができる。
【0045】
(第2実施形態)
次に、図面を参照して、本発明の第2実施形態について説明する。
(第2実施形態の構成)
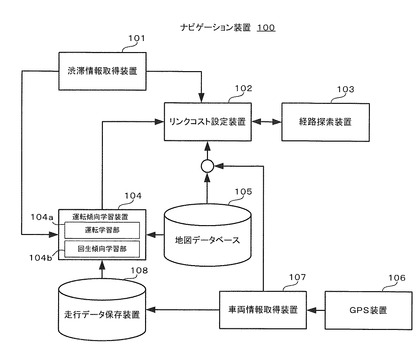
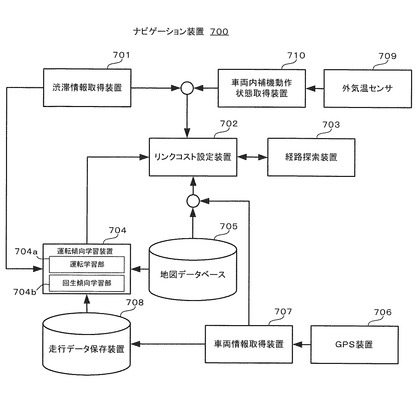
図7は、本発明の第2実施形態としてのナビゲーション装置を表す機能ブロック図である。
図7のナビゲーション装置700は、図1のナビゲーション装置100の構成に加えて、車両内機器動作状態取得装置710および外気温センサー709を備える。車両内機器動作状態取得装置710は、エアコン等の車室内ユニットの動作状態の情報を取得する。また、外気温センサー709は、外気温を取得する。
車両内機器動作状態取得装置710は、また、外気温センサー709からの外気温の情報に基づいて環境温度に依存する車両内機器について、現在の環境温度に応じた状態を検知する。この検知の態様については後述する。
【0046】
ナビゲーション装置700における渋滞情報取得装置701、リンクコスト設定装置702、および、経路探索装置703は、ナビゲーション装置100における渋滞情報取得装置101、リンクコスト設定装置102、および、経路探索装置103に各対応する。
同様に、ナビゲーション装置700における運転傾向学習装置704、地図データベース705、および、GPS装置706、は、ナビゲーション装置100における運転傾向学習装置104、地図データベース105、および、GPS装置106に各対応する。
【0047】
尚、運転傾向学習装置704は、運転学習部704aと回生傾向学習部704bとを有する。これは、第1の実施形態における運転傾向学習装置104が運転学習部104aと回生傾向学習部104bとを有する構成に対応している。
また、ナビゲーション装置700における車両情報取得装置707、および、走行データ保存装置708は、ナビゲーション装置100における車両情報取得装置107、および、走行データ保存装置108に各対応する。
ナビゲーション装置700におけるナビゲーション装置100と上述のように各対応する装置はナビゲーション装置100におけるものと略同様に機能するものであるため、それら各個の説明はナビゲーション装置100の対応する各装置の説明を援用する。
【0048】
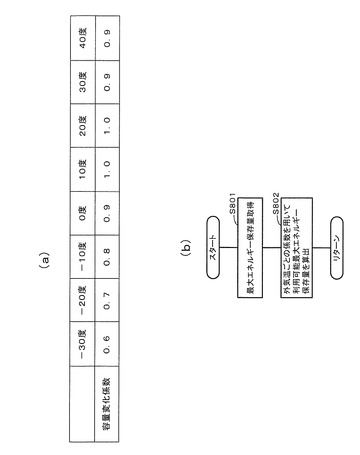
図8は、第2実施形態の特徴を説明するための図である。
図8(a)は、環境温度と容量変化係数との対応関係を表す図である。ここに容量変化係数とは、バッテリーの既定の基準容量に対する当該温度で使用可能な容量値の相対値である。図示のように−30度から10度ずつの幅で40度までの8つの温度域の区分に応じて、1.0以下の係数が対応している。図示のように−30度のような極寒の環境では相対的に係数が低い。
【0049】
図8(b)は、容量変化係数を用いて利用可能最大エネルギー保存量を算出するための処理を表すフローチャートである。この処理は、車両内機器動作状態取得装置710が外気温センサー709からの外気温の情報に基づいて環境温度に依存する車両内機器について現在の環境温度に応じた状態を検知する場合の該検知の一例である。
図8(b)の処理では、先ず、最大エネルギー保存量を取得する(ステップS801)。
【0050】
次いで、図8(a)の容量変化係数を用いて、環境温度に応じて利用可能な最大エネルギ保存量を算出する(ステップS802)。
電池系のエネルギー源の場合、非常に寒い環境下では、エネルギーを引き出し難くなる現象が生じるため、上述のように、車両内機器動作状態取得装置710が環境温度に応じて利用可能な最大エネルギー保存量の補正値を算出してこの現象に対応する。
また、車両内機器動作状態取得装置710は、環境温度(外気温)と、エアコン等の車室内ユニットの動作による負荷の推移を監視し、恒常的なエネルギー消費量を設定する。
【0051】
上述のように、第2実施形態では、車両内機器動作状態取得装置710が環境温度を勘案した最大エネルギー保存量の補正値を算出し、リンクコスト設定装置702が、該算出結果を取得し、該取得した値を用いてリンクコストの計算を実行する。車両内機器動作状態取得装置710は、更に、車両内機器の動作状態の動作による負荷の推移に係る情報をリンクコスト設定装置702に供給する。該供給を受けたリンクコスト設定装置702が、車両内機器の動作状態による実際の負荷状況を反映させてリンクコストの計算を実行する。従って、リンクコスト設定装置702は、より実態に即したリンクコストの計算ができる。
【0052】
特に、EVなどのエネルギー保存量が少ない車種では、上述のように実態に即したリンクコストを、到達可能範囲の推定に反映させることができる。尚、車両重量が推定できない場合には、車両重量+乗員1名の場合と車両総重量の場合の2種類でリンク計算を行い、到達可能範囲の幅が認識できるように計算する。
上述における到達可能範囲の推定は、例えば、経路探索装置703(103)に設けた到達可能範囲演算部によって行うことができる。
上述において、運転傾向学習装置704(その運転学習部704a)が運転傾向学習部に対応する。また、リンクコスト設定装置702がリンクコスト設定部に対応する。さらに、経路探索装置703が経路探索部に対応する。
【0053】
(第2実施形態のナビゲーション装置の効果)
第2実施形態としてのナビゲーション装置700は、第1実施形態のナビゲーション装置100と同様の効果を奏するに加えて、次のような効果を奏する。
(2−1)第2実施形態としてのナビゲーション装置700は、運転傾向学習装置704が車両の走行履歴を用いて運転傾向を学習する。また、リンクコスト設定装置702が運転傾向学習装置704で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定する。さらに、経路探索装置703がリンクコスト設定装置702で設定したリンクコストと地図情報に基づいて走行経路を探索をする。
【0054】
また、運転傾向学習装置704の回生傾向学習部704bが、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する。
また、リンクコスト設定装置702は、回生傾向学習部704bによる予測エネルギー回生量の学習結果を用いてリンクコストを動的に設定する。
また、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
【0055】
更に、運転傾向学習装置704は、学習した運転傾向に基づいて予測エネルギー消費量と予測回収エネルギーを補正する。
また、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、運転傾向学習装置704が補正した予測エネルギー消費量と予測エネルギー回生量に基づいてリンクコストを動的に設定する。
そして、特に、リンクコスト設定装置702は、環境温度に依存したエネルギー消費に関係する情報に基づいて到達可能範囲の推定を行う
従って、上記(2−1)のナビゲーション装置700では、実態に即したリンクコストを到達可能範囲の推定に反映させることができる。従って、より高い精度で到達可能範囲を推定することができる。
【符号の説明】
【0056】
100、700………………ナビゲーション装置
101、701………………渋滞情報取得装置
102、702………………リンクコスト設定装置
103、703………………経路探索装置
104、704………………運転傾向学習装置
104a、704a…………運転学習部
104b、704b…………回生傾向学習部
105、705………………地図データベース
106、706………………GPS装置
107、707………………車両情報取得装置
108、708………………走行データ保存装置
709…………………………外気温センサー
710…………………………車両内機器動作状態取得装置
【技術分野】
【0001】
本発明は、ナビゲーション装置に関し、特に勾配情報を利用したナビゲーション装置に関する。
【背景技術】
【0002】
道路勾配と走行速度に対応した燃費情報を記録するとともに、現況の交通情報から推定された走行速度と燃費情報とを用いて、燃料消費量の少ない経路を探索するナビゲーション装置が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−32541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような従来の技術では道路勾配と走行速度による燃費情報を記録し、この情報に基づいて燃料消費量の少ない経路を探索するが、加速や減速に際しての運転者のアクセル操作の傾向や、勾配の変化に応じたアクセル操作の傾向を考慮していないため、エネルギー消費量を高い精度で設定することができない可能性があった。
本発明は上述した状況に鑑みてなされたものであり、運転者の運転特性に基づいて、エネルギー消費量をより高い精度で設定することができるナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明のナビゲーション装置では、車両の走行履歴を用いて運転特性を学習し、その学習結果の運転特性と、走行経路の距離情報および勾配情報に基づき、予測エネルギー消費量によるリンクコストを動的に設定し、ルート探索をする。
【発明の効果】
【0006】
本発明によれば、運転特性特性を勘案して高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1実施形態としてのナビゲーション装置を表す機能ブロック図である。
【図2】図1のナビゲーション装置における運転傾向の学習処理を表すフローチャートである。
【図3】図1のナビゲーション装置における運動エネルギー回生傾向の学習処理を例示するフローチャートである。
【図4】図1のナビゲーション装置におけるリンクコスト算出処理を例示するフローチャートである。
【図5】図1のナビゲーション装置における、道路区分と車速域の区分とに従った、勾配ごとの、単位エネルギー当りの走行距離の学習を例示する図である。
【図6】図4の処理によるリンクコスト算出結果を例示する図である。
【図7】本発明の第2実施形態としてのナビゲーション装置を表す機能ブロック図である。
【図8】第2実施形態の特徴を説明するための図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明の実施形態について詳述することにより本発明を明らかにする。
尚、以下に説明する本発明の実施形態としてのナビゲーション装置は、回生制動が可能な車両に搭載し、かつ、この車両では、回生エネルギーをバッテリーに回収可能な構成を有するものであることを前提としている。
(ナビゲーション装置の構成)
図1は、本発明の第1実施形態としてのナビゲーション装置を表す機能ブロック図である。
図1のナビゲーション装置100は、渋滞情報取得装置101、リンクコスト設定装置102、経路探索装置103、運転傾向学習装置104、地図データベース105、GPS装置106、車両情報取得装置107、および、走行データ保存装置108を有する。
【0009】
渋滞情報取得装置101は、VICS(Vehicle Information and Communication System)等の無線通信によって道路の渋滞情報を取得する。
リンクコスト設定装置102は、勾配、運転傾向、および、走行時間等に依拠して算出するエネルギー消費量に基づいてリンクコストを設定する。
経路探索装置103は、エネルギー消費量を最小化するエネルギー消費量最小経路を探索可能である。尚、モード切り替え操作に応じて、最短時間経路や最短距離経路を探索可能な機能をも併せ持つものであり得る。
【0010】
運転傾向学習装置104は、運転者のアクセル操作の仕方や回生の仕方をも学習する機能部である。本例の運転傾向学習装置104は、運転学習部104aと回生傾向学習部104bとを有する。運転学習部104aはアクセル操作の仕方等の運転者の運転傾向を学習する。回生傾向学習部104bは運転者の回生の仕方に関する傾向を学習する。
地図データベース105は、地図情報を保有するが、本例では、この地図情報は勾配情報をも含んでいる。
【0011】
GPS装置106は、GPS(Global Positioning System)衛星から受信した情報に基づいてこのGPS装置106を搭載した車両等の現在位置を測位する。
車両情報取得装置107は、GPS装置106からの位置情報や、図示しないCAN(Controller Area Network)からの加速度やエネルギー保存量等の車両情報を取得する。
走行データ保存装置108は、車両情報取得装置107が取得した種々の情報を保存する。
尚、リンクコストは、一般にカーナビゲーションシステム等において、出発地点から目的地点までの経路の所要時間、経路長、エネルギー消費量をコスト関数として算出するに際しての、各道路リンクの所要時間、リンク長、エネルギー消費量等である。
【0012】
(運転傾向の学習処理)
図2は、図1のナビゲーション装置における運転学習の処理を表すフローチャートである。運転学習は、アクセル操作の仕方等の運転者の運転傾向の学習である。運転傾向の学習は、図1のナビゲーション装置100の運転傾向学習装置104における運転学習部104aが主体となり、関連部と連携してこの処理を実行する。
【0013】
次に運転傾向の学習に関する処理を、図2のフローチャートを参照して説明する。
先ず、ナビゲーション装置100は、車両が走行した際の、経路、車速、エネルギー保存量、エネルギー消費量、渋滞状況等の車両情報を車両情報取得装置107で取得し、走行データ保存装置108で保存する(ステップS201)。
車両情報取得装置107による車両情報の取得は、GPS装置106や図示しない自律航法装置による測位情報である緯度・経度情報の取得を含む。
【0014】
ステップS201に次いで、当該車両が回生制動可能な車両か否かを判断する(ステップS202)。
ステップS202で回生制動可能な車両であると判断した場合には(ステップS202:Yes)、次いで、エネルギー保存量とエネルギー回生量との各情報を走行データ保存装置108に保存する(ステップS203)。
次いで、当該車両が停止したか否かを判断する(ステップS204)。尚、ステップS202で回生制動可能な車両であると判断した場合には(ステップS202:No)、ステップS203をスキップしてステップS204の判断を実行する。
【0015】
ステップS204で車両が停止したと判断すると(ステップS204:Yes)、この判断を行ったタイミングで当該車両の起動から停止までの一連の走行データを走行データ保存装置108に保存する(ステップS205)。
次いで、走行データ保存装置108に蓄積がある各一連の走行データに係る経路の勾配データおよび勾配ごとの道路区分を地図データベースから取得する(ステップS206)。
そして、ステップS206で取得した勾配ごとに、道路区分と車速域の区分とに従って、単位エネルギーあたりの走行距離を学習する(ステップS207)。
【0016】
道路区分と車速域の区分とに従った、勾配ごとの、単位エネルギー(kwh)あたりの走行距離(km)を図5に例示したように学習する。
また、ステップS207での学習では、運転者の運転傾向を学習するために勾配変化地点(たとえば+勾配、−勾配)を抽出するが、渋滞による影響を除くため、渋滞時のデータは解析範囲から除外する(ステップS208)。
勾配変化地点では加速・減速・一定速の割合やそれぞれでの運転者の運転傾向を学習する。例えば、+勾配では、加速が70%、減速が10%、一定速が20%であるなどして運転傾向を学習する。また、−勾配では、加速10%、減速70%などであるなどして運転傾向を学習する。
【0017】
勾配変化の閾値としては、例えば、±2%を超えれば勾配変化地点とみなす(ステップS209)。そして、上り勾配および下り勾配の何れに該当するかを判断する(ステップS210)。
ステップS210で上り勾配と判断したときには(ステップS210:上り勾配)、勾配変化前後での車速の変化が±5km/h以内であるか否かを判断する(ステップS211u)。
ステップS211uで、車速の変化が±5km/h以内であると判断したときには(ステップS211u:Yes)一定速の走行とみなして一定速の走行回数としてカウントする(ステップS2uf)。
【0018】
一方、ステップS211uで、車速の変化が+5km/h以上である場合には(ステップS211u:No、+5km以上)、加速の走行とみなして、加速回数としてカウントする(ステップS2ua)。
他方、ステップS211uで、車速の変化が−5km/h以下である場合には(ステップS211u:No、−5km以下)、減速の走行とみなして、減速回数としてカウントする(ステップS2uas)。
ステップS2uf、ステップS2ua、ステップS2uasは、これらを択一的に実行する。そして、これらを択一的に実行の後、次の勾配変化地点の有無を判断する(ステップS213u)。
【0019】
ステップS213uで次の勾配変化地点が有ると判断した場合には(ステップS213u:Yes)、ステップS210に戻る。
一方、ステップS213uで次の勾配変化地点が無いと判断した場合には(ステップS213u:No)、既述のようにカウントした、加速回数、一定回数、および、減速回数のそれぞれについて、カウント回数の総和に対する割合を算出する(ステップS214u)。
【0020】
上述のステップS210で下り勾配と判断したときには(ステップS210:下り勾配)、勾配変化前後での車速の変化が±5km/h以内であるか否かを判断する(ステップS211d)。
ステップS211dで、車速の変化が±5km/h以内であると判断したときには(ステップS211d:Yes)一定速の走行とみなして一定速の走行回数としてカウントする(ステップS2df)。
一方、ステップS211dで、車速の変化が+5km/h以上である場合には(ステップS211d:No、+5km以上)、加速の走行とみなして、加速回数としてカウントする(ステップS2da)。
【0021】
他方、ステップS211dで、車速の変化が−5km/h以下である場合には(ステップS211d:No、−5km以下)、減速の走行とみなして、減速回数としてカウントする(ステップS2das)。
ステップS2df、ステップS2da、ステップS2dasは、これらを択一的に実行する。そして、これらを択一的に実行の後、次の勾配変化地点の有無を判断する(ステップS213d)。
【0022】
ステップS213dで次の勾配変化地点が有ると判断した場合には(ステップS213d:Yes)、ステップS210に戻る。
一方、ステップS213dで次の勾配変化地点が無いと判断した場合には(ステップS213d:No)、既述のようにカウントした、加速回数、一定回数、および、減速回数のそれぞれについて、カウント回数の総和に対する割合を算出する(ステップS214d)。
【0023】
(運動エネルギー回生傾向の学習処理)
運動エネルギーの回生が可能な車両では回生量の学習を行う。次に、この運動エネルギーの回生に関する学習における処理の例を図面を参照して説明する。
回生傾向の学習は、図1のナビゲーション装置100の運転傾向学習装置104における回生傾向学習部104bが主体となり、関連部と連携してこの処理を実行する。
図3は、図1のナビゲーション装置における運動エネルギー回生傾向の学習処理を例示するフローチャートである。
【0024】
走行データ保存装置108に蓄積してある一連の走行データより勾配範囲のデータを抽出する(ステップS301)。次いで、ステップS301で抽出したデータのうち下り勾配範囲のデータを抽出する(ステップS302)。
そして、ステップS302で抽出したデータのうち渋滞時や停止時に該当するデータを当該学習での解析対象範囲から除外する。また、バッテリーのSOCが回生によるエネルギーを蓄積することが出来ない水準域にある時のデータを当該学習での解析対象範囲から除外する(ステップS303)。
【0025】
ステップS303に次いで、下り勾配の測定範囲で車速を既定値と仮定して回収できる予測回収エネルギー量を算出する。この算出に際しては、車両特性に応じた複数通りの既定の車速ごとの性能を表すデータを予め用意しておき、該用意したデータを参照する。また、上記算出以前に取得していた予測回収エネルギー量があれば上記算出した値に加算する(ステップS304)。実際にエネルギー回収した量も積算し、既得のエネルギー回収量がある場合にはこれも積算しておく(ステップS305)。ステップS304で算出したエネルギー量とステップS305で算出したエネルギー量とを比較することによって、運転者が大体何割回生ができているのかを算出する(ステップS306)。
【0026】
(リンクコスト算出処理)
次に、経路探索時に利用するリンクごとのリンクコスト算出処理の例を図面を参照して説明する。
リンクコスト算出は、図1のナビゲーション装置100のリンクコスト設定装置102が主体となり、関連部と連携してこの処理を実行する。
図4は、図1のナビゲーション装置におけるリンクコスト算出処理を例示するフローチャートである。
先ず、リンクの道路区分と渋滞情報より予測走行速度を設定する(ステップS401)。
【0027】
次いで、当該リンク内に既得の補間点があるか否かを判断する(ステップS402)。
補間点がある場合には(ステップS402:Yes)その補間点に関する予測速度・道路勾配・補間点間距離を算出し、或いは、既述のデータを読み出す等して取得する(ステップS403)。
ステップS403に次いで、学習しておいた単位エネルギー当りの走行距離のデータの有無を判断する(ステップS404)。
ステップS404で、学習しておいた単位エネルギー当りの走行距離のデータが有ると判断したときには(ステップS404:Yes)この学習値によりエネルギー消費量を算出する(ステップS405)。
【0028】
一方、ステップS404で、学習しておいた単位エネルギー当りの走行距離のデータが無いと判断したときには(ステップS404:No)、既定の標準的な値を用いてエネルギー消費量を算出する(ステップS406)。
ステップS405またはステップS406の処理を実行の後、既得の補間点またはノードのデータとの比較において勾配が変化しているかを判断する(ステップS407)。
ステップS407で勾配が変化していると判断したときには(ステップS407:Yes)、学習した勾配ごとの運転特性値の有無を判断する(ステップS408)。
【0029】
ステップS408で、学習した勾配ごとの運転特性値が既に存在すると判断したときには(ステップS408:Yes)、運転特性値に合わせてエネルギー消費量に係数を掛けることによってエネルギー消費量を実態に合わせて補正する(ステップS409)。
ステップS409における補正も、運転傾向学習装置104(その運転学習部104a)による機能である。
ステップS409におけるエネルギー消費量に係数を掛ける処理では、例えば、+勾配での加速に関しては、エネルギ消費量を増加させる。増加の程度の具体例としては、勾配変化後の50m分又は補間点間の距離のエネルギー消費量×1.2とする。
【0030】
また、+勾配での減速に関しては、エネルギ消費量を減少させる。減少の程度の具体例としては、勾配変化後の50m分のエネルギー消費量×0.8とする。
一方、−勾配での加速に関しては、エネルギ消費量を増加させる。増加の程度の具体例としては、勾配変化後の50m分のエネルギー消費量×1.1とする。
また、―勾配での減速に関しては、一定速と同じで変化がないものとして扱う。
【0031】
即ち、運転傾向学習部104の運転学習部104aでは、学習により取得している運転傾向に応じてエネルギー消費量に係数を掛けて予測エネルギー消費量を補正する。
ステップS409に次いで、当該車両が下り勾配で運動エネルギーを回生可能であるか否かを判断する(ステップS410)。
ステップS407で、勾配が変化していないと判断したとき、(ステップS407:No)、および、ステップS408で、学習した勾配ごとの運転特性値が存在しないと判断したときににも(ステップS408:No)、上述のステップS410に移行する。
【0032】
下り勾配で運動エネルギーを回生可能であると判断したときには(ステップS410:Yes)、下り勾配部分の距離と予測走行速度より予測回収エネルギー量を算出する(ステップS411)。
ステップS411で予測回収エネルギー量を算出した後、運動エネルギーの回生が学習できているか否かを判断する(ステップS412)。
運動エネルギーの回生が学習できている場合には(ステップS413:Yes)、予測回収エネルギー量に学習した割合を掛ける(ステップS413)。
【0033】
即ち、運転傾向学習部104の回生傾向学習部104bでは、学習により取得している運動エネルギーの回生傾向に応じてエネルギー消費量に係数を掛けて予測回収エネルギー量を補正する。
このステップS413における補正も運転傾向学習部104による機能であるが、特にその回生傾向学習部104bがこのように機能する。
次いで、エネルギー消費量よりも回収エネルギーが多いか否かを判断する(ステップS414)。
【0034】
エネルギー消費量よりも回収エネルギーが多い場合には(ステップS414:Yes)、直前の処理サイクルで取得したエネルギー保存量の予測値または直前のノードにおけるエネルギー保存量の予測値が回生によるエネルギーを回収することが出来ない程度に高い水準域にあるか否かを判断する(ステップS415)。
ステップS415で、エネルギー保存量の予測値が、回生によるエネルギーを回収することが出来ない程度に高い水準域にあると判断したときには(ステップS415:Yes)、当該補間点間での走行によるエネルギー消費量より予測回収エネルギー量の方が現実には大きいとしても、予測回収エネルギー量はエネルギ消費量までとして扱う(ステップS416)。
【0035】
ステップS416で予測回収エネルギー量はエネルギ消費量までとして扱った場合には、エネルギー消費量から予測回収エネルギー量を差し引いた値を補間点間のエネルギ消費量、即ち、補間点間コストとする(ステップS417)。
また、ステップS415で、エネルギー保存量の予測値が回生によるエネルギーを回収することが出来ない水準域未満であると判断した場合にも(ステップS415:No)、ステップS417に移行する。
【0036】
ステップS417に次いで、予測エネルギー消費量からエネルギー消費量を減算した値に回収エネルギー量を加算する(ステップS418)。
他に補間点がなくなり(ステップS402:No)、次のノードまで計算した場合、ステップS418で算出したリンク内補間コストを積算してリンクコストとする(ステップS419)。
ステップS418でのリンクコストの算定対象とするリンクが残っているか否かを判断する(ステップS420)。
リンクコストの算定対象とするリンクが残っていないと判断したときには(ステップS420:No)、補間点リンクコストの積算値をリンクコストとして用いる。
【0037】
ステップS420で、リンクコストの算定対象とするリンクが残っていると判断したときには(ステップS420:Yes)、ステップS401に戻る。
一方、ステップS410で、当該車両が下り勾配で運動エネルギーを回生できないと判断したときにも(ステップS410:No)、ステップS402に移行する。
更に、ステップS414で、エネルギー消費量よりも回収エネルギーが多い場合にも(ステップS414:Yes)ステップS402に移行する。
既述のように、ステップS402で他に補間点がなくなったと判断したときに(ステップS402:No)、ステップS419に移行してリンクコストを得る。
【0038】
図4のフローチャートを参照して例示したようなリンクコスト算出処理により、例えば図6に示したようにリンクコストを顕在化することができる。
図6(a)はエネルギー保存量が100%である場合のリンクコストである。また、図6(b)はエネルギー保存量が70%である場合のリンクコストである。
図6(a)と図6(b)とを対比して明瞭であるとおり、リンクコストがマイナスであるところがエネルギー保存量に応じてリンクコストが変化していく。また、経路の選び方により予測エネルギー保存量も回生などに依存して変化する。このため、同じリンクについて、走る向きやそれまでの経路に応じて動的にリンクコストが変化する。
【0039】
即ち、図1におけるリンクコスト設定装置102は、リンクコストを設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
上述において、運転傾向学習装置104(その運転学習部104a)が運転傾向学習部対応する。また、リンクコスト設定装置102がリンクコスト設定部に対応する。さらに、経路探索装置103が経路探索部に対応する。
【0040】
(第1実施形態のナビゲーション装置の効果)
(1−1)第1実施形態としてのナビゲーション装置100は、運転傾向学習装置104が車両の走行履歴を用いて運転傾向を学習する。また、リンクコスト設定装置102が運転傾向学習装置104で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定する。さらに、経路探索装置103がリンクコスト設定装置102で設定したリンクコストと地図情報に基づいて走行経路を探索をする。
【0041】
上記(1−1)のナビゲーション装置100における運転傾向学習装置104での学習では、道路勾配の変化とともに、例えば、アクセル操作や加速度の変化に現われる運転傾向を読む。より具体的に例示するなら、上り勾配に入る場合に積極的にアクセルを踏んでいく傾向や、下り勾配でもブレーキをあまり踏まずに位置エネルギーを加速に用いる傾向があるか等を学習する。
従って、上記(1−1)のナビゲーション装置100では、このような学習によって取得した運転特性特性を勘案して高い精度でエネルギー消費量を設定することができるナビゲーション装置を提供できる。
【0042】
(1−2)上記(1−1)のナビゲーション装置100において特に、運転傾向学習装置104の回生傾向学習部104bが、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する。
また、リンクコスト設定装置102は、回生傾向学習部104bによる予測エネルギー回生量の学習結果を用いてリンクコストを動的に設定する。
従って、上記(1−2)のナビゲーション装置100では、運動エネルギーの回生が可能な車両において、下り勾配はエネルギーをほぼ使わず走ることができるだけではなく、運動エネルギーを回生して蓄えることができる場合に、蓄えられる量を算出することができる。このため、運動エネルギーの回生が可能な車両におけるエネルギー消費量をより高い精度で設定することができる。
【0043】
(1−3)上記(1−2)のナビゲーション装置100において特に、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
従って、上記(1−3)のナビゲーション装置100では、例えば、現在のエネルギー保存量に応じて実態に即した予測回収エネルギーの補正値を勘案してリンクごとにリンクコストを動的に設定できる。このため、それぞれのノードで現在時点でのエネルギー保存量を算出することによって、リンクコストをより高い精度で設定することができる。
【0044】
(1−4)運転傾向学習装置104は、学習した運転傾向に基づいて予測エネルギー消費量と予測回収エネルギーを補正し、リンクコスト設定装置102は、当該リンクコストを動的に設定するに際し、前記運転傾向学習装置104が補正した予測エネルギー消費量と予測エネルギー回生量に基づいてリンクコストを動的に設定する。
従って、回生の行えるような勾配であっても、運転傾向によって運動エネルギー回生の可否が分かれるが、その下り勾配での運転傾向の学習結果を反映して運動エネルギー回生の可否を適確に判断することができる。従って、実態に即してより高い精度でリンクコストを設定することができる。
【0045】
(第2実施形態)
次に、図面を参照して、本発明の第2実施形態について説明する。
(第2実施形態の構成)
図7は、本発明の第2実施形態としてのナビゲーション装置を表す機能ブロック図である。
図7のナビゲーション装置700は、図1のナビゲーション装置100の構成に加えて、車両内機器動作状態取得装置710および外気温センサー709を備える。車両内機器動作状態取得装置710は、エアコン等の車室内ユニットの動作状態の情報を取得する。また、外気温センサー709は、外気温を取得する。
車両内機器動作状態取得装置710は、また、外気温センサー709からの外気温の情報に基づいて環境温度に依存する車両内機器について、現在の環境温度に応じた状態を検知する。この検知の態様については後述する。
【0046】
ナビゲーション装置700における渋滞情報取得装置701、リンクコスト設定装置702、および、経路探索装置703は、ナビゲーション装置100における渋滞情報取得装置101、リンクコスト設定装置102、および、経路探索装置103に各対応する。
同様に、ナビゲーション装置700における運転傾向学習装置704、地図データベース705、および、GPS装置706、は、ナビゲーション装置100における運転傾向学習装置104、地図データベース105、および、GPS装置106に各対応する。
【0047】
尚、運転傾向学習装置704は、運転学習部704aと回生傾向学習部704bとを有する。これは、第1の実施形態における運転傾向学習装置104が運転学習部104aと回生傾向学習部104bとを有する構成に対応している。
また、ナビゲーション装置700における車両情報取得装置707、および、走行データ保存装置708は、ナビゲーション装置100における車両情報取得装置107、および、走行データ保存装置108に各対応する。
ナビゲーション装置700におけるナビゲーション装置100と上述のように各対応する装置はナビゲーション装置100におけるものと略同様に機能するものであるため、それら各個の説明はナビゲーション装置100の対応する各装置の説明を援用する。
【0048】
図8は、第2実施形態の特徴を説明するための図である。
図8(a)は、環境温度と容量変化係数との対応関係を表す図である。ここに容量変化係数とは、バッテリーの既定の基準容量に対する当該温度で使用可能な容量値の相対値である。図示のように−30度から10度ずつの幅で40度までの8つの温度域の区分に応じて、1.0以下の係数が対応している。図示のように−30度のような極寒の環境では相対的に係数が低い。
【0049】
図8(b)は、容量変化係数を用いて利用可能最大エネルギー保存量を算出するための処理を表すフローチャートである。この処理は、車両内機器動作状態取得装置710が外気温センサー709からの外気温の情報に基づいて環境温度に依存する車両内機器について現在の環境温度に応じた状態を検知する場合の該検知の一例である。
図8(b)の処理では、先ず、最大エネルギー保存量を取得する(ステップS801)。
【0050】
次いで、図8(a)の容量変化係数を用いて、環境温度に応じて利用可能な最大エネルギ保存量を算出する(ステップS802)。
電池系のエネルギー源の場合、非常に寒い環境下では、エネルギーを引き出し難くなる現象が生じるため、上述のように、車両内機器動作状態取得装置710が環境温度に応じて利用可能な最大エネルギー保存量の補正値を算出してこの現象に対応する。
また、車両内機器動作状態取得装置710は、環境温度(外気温)と、エアコン等の車室内ユニットの動作による負荷の推移を監視し、恒常的なエネルギー消費量を設定する。
【0051】
上述のように、第2実施形態では、車両内機器動作状態取得装置710が環境温度を勘案した最大エネルギー保存量の補正値を算出し、リンクコスト設定装置702が、該算出結果を取得し、該取得した値を用いてリンクコストの計算を実行する。車両内機器動作状態取得装置710は、更に、車両内機器の動作状態の動作による負荷の推移に係る情報をリンクコスト設定装置702に供給する。該供給を受けたリンクコスト設定装置702が、車両内機器の動作状態による実際の負荷状況を反映させてリンクコストの計算を実行する。従って、リンクコスト設定装置702は、より実態に即したリンクコストの計算ができる。
【0052】
特に、EVなどのエネルギー保存量が少ない車種では、上述のように実態に即したリンクコストを、到達可能範囲の推定に反映させることができる。尚、車両重量が推定できない場合には、車両重量+乗員1名の場合と車両総重量の場合の2種類でリンク計算を行い、到達可能範囲の幅が認識できるように計算する。
上述における到達可能範囲の推定は、例えば、経路探索装置703(103)に設けた到達可能範囲演算部によって行うことができる。
上述において、運転傾向学習装置704(その運転学習部704a)が運転傾向学習部に対応する。また、リンクコスト設定装置702がリンクコスト設定部に対応する。さらに、経路探索装置703が経路探索部に対応する。
【0053】
(第2実施形態のナビゲーション装置の効果)
第2実施形態としてのナビゲーション装置700は、第1実施形態のナビゲーション装置100と同様の効果を奏するに加えて、次のような効果を奏する。
(2−1)第2実施形態としてのナビゲーション装置700は、運転傾向学習装置704が車両の走行履歴を用いて運転傾向を学習する。また、リンクコスト設定装置702が運転傾向学習装置704で学習した運転傾向と道路の距離情報および勾配情報とに基づく予測エネルギー消費量からリンクコストを動的に設定する。さらに、経路探索装置703がリンクコスト設定装置702で設定したリンクコストと地図情報に基づいて走行経路を探索をする。
【0054】
また、運転傾向学習装置704の回生傾向学習部704bが、運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する。
また、リンクコスト設定装置702は、回生傾向学習部704bによる予測エネルギー回生量の学習結果を用いてリンクコストを動的に設定する。
また、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいてエネルギー回生の可否を判断し、この判断により経路順にリンクコストを算出して該設定を行う。
【0055】
更に、運転傾向学習装置704は、学習した運転傾向に基づいて予測エネルギー消費量と予測回収エネルギーを補正する。
また、リンクコスト設定装置702は、当該リンクコストを動的に設定するに際し、運転傾向学習装置704が補正した予測エネルギー消費量と予測エネルギー回生量に基づいてリンクコストを動的に設定する。
そして、特に、リンクコスト設定装置702は、環境温度に依存したエネルギー消費に関係する情報に基づいて到達可能範囲の推定を行う
従って、上記(2−1)のナビゲーション装置700では、実態に即したリンクコストを到達可能範囲の推定に反映させることができる。従って、より高い精度で到達可能範囲を推定することができる。
【符号の説明】
【0056】
100、700………………ナビゲーション装置
101、701………………渋滞情報取得装置
102、702………………リンクコスト設定装置
103、703………………経路探索装置
104、704………………運転傾向学習装置
104a、704a…………運転学習部
104b、704b…………回生傾向学習部
105、705………………地図データベース
106、706………………GPS装置
107、707………………車両情報取得装置
108、708………………走行データ保存装置
709…………………………外気温センサー
710…………………………車両内機器動作状態取得装置
【特許請求の範囲】
【請求項1】
車両の走行履歴を用いて運転傾向を学習する運転傾向学習部と、
前記運転傾向学習部で学習した運転傾向と道路の距離情報および勾配情報とに基づく車両の予測エネルギー消費量からリンクコストを動的に設定するリンクコスト設定部と、
前記リンクコスト設定部で設定したリンクコストと地図情報に基づいて走行経路を探索をする経路探索部と、
を備えていることを特徴とするナビゲーション装置。
【請求項2】
回生制動が可能な車両に搭載したナビゲーション装置であって、
前記運転傾向学習部で学習した運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する回生傾向学習部を更に有し、
前記リンクコスト設定部は、前記回生傾向学習部による予測エネルギー回生量と前記予測エネルギー消費量とを用いてリンクコストを動的に設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記リンクコスト設定部は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいて回生実施の可否を判断し、この判断により経路順にリンクコストを設定して該設定を行うことを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記運転傾向学習部は、学習した運転傾向に基づいて予測エネルギー消費量の補正値を取得し、
前記回生傾向学習部は、学習したエネルギー回収割合に基づいて予測エネルギー回生量の補正値を取得し、
前記リンクコスト設定部は、当該リンクコストを動的に設定するに際し、前記予測エネルギー消費量の補正値と前記予測エネルギー回生量の補正値に基づいてリンクコストを動的に設定することを特徴とする請求項2または3に記載のナビゲーション装置。
【請求項5】
前記経路探索装置は、前記リンクコスト設定部で得た環境温度に依存したエネルギー消費に関係する情報に基づいて車両の到達可能範囲の設定を行うことを特徴とする請求項1ないし4の何れか一項に記載のナビゲーション装置。
【請求項1】
車両の走行履歴を用いて運転傾向を学習する運転傾向学習部と、
前記運転傾向学習部で学習した運転傾向と道路の距離情報および勾配情報とに基づく車両の予測エネルギー消費量からリンクコストを動的に設定するリンクコスト設定部と、
前記リンクコスト設定部で設定したリンクコストと地図情報に基づいて走行経路を探索をする経路探索部と、
を備えていることを特徴とするナビゲーション装置。
【請求項2】
回生制動が可能な車両に搭載したナビゲーション装置であって、
前記運転傾向学習部で学習した運転傾向と道路の距離情報および勾配情報とに基づく下り勾配の道路での予測エネルギー回生量を学習する回生傾向学習部を更に有し、
前記リンクコスト設定部は、前記回生傾向学習部による予測エネルギー回生量と前記予測エネルギー消費量とを用いてリンクコストを動的に設定することを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記リンクコスト設定部は、当該リンクコストを動的に設定するに際し、現在蓄えているエネルギー保存量に基づいて回生実施の可否を判断し、この判断により経路順にリンクコストを設定して該設定を行うことを特徴とする請求項2に記載のナビゲーション装置。
【請求項4】
前記運転傾向学習部は、学習した運転傾向に基づいて予測エネルギー消費量の補正値を取得し、
前記回生傾向学習部は、学習したエネルギー回収割合に基づいて予測エネルギー回生量の補正値を取得し、
前記リンクコスト設定部は、当該リンクコストを動的に設定するに際し、前記予測エネルギー消費量の補正値と前記予測エネルギー回生量の補正値に基づいてリンクコストを動的に設定することを特徴とする請求項2または3に記載のナビゲーション装置。
【請求項5】
前記経路探索装置は、前記リンクコスト設定部で得た環境温度に依存したエネルギー消費に関係する情報に基づいて車両の到達可能範囲の設定を行うことを特徴とする請求項1ないし4の何れか一項に記載のナビゲーション装置。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−2850(P2013−2850A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−131645(P2011−131645)
【出願日】平成23年6月13日(2011.6.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月13日(2011.6.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]