
ナビゲーション装置
【課題】ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができる「ナビゲーション装置」を提供すること。
【解決手段】走行軌跡記録手段23と、自走開始地点を記録する自走開始地点記録手段24と、自走の終了を検知する自走終了検知手段25と、自走終了地点を記録する自走終了地点記録手段26と、電源9切断前に、経路探索手段21に、自走開始地点から自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段27と、探索させた自走地点間最適経路が、走行軌跡記録手段23が記録した自走区間走行軌跡と異なる場合に、探索させた自走地点間最適経路を、電源9切断前にユーザに提示する自走地点間最適経路提示手段28とを備えたこと。
【解決手段】走行軌跡記録手段23と、自走開始地点を記録する自走開始地点記録手段24と、自走の終了を検知する自走終了検知手段25と、自走終了地点を記録する自走終了地点記録手段26と、電源9切断前に、経路探索手段21に、自走開始地点から自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段27と、探索させた自走地点間最適経路が、走行軌跡記録手段23が記録した自走区間走行軌跡と異なる場合に、探索させた自走地点間最適経路を、電源9切断前にユーザに提示する自走地点間最適経路提示手段28とを備えたこと。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に係り、特に、経路誘導をともなわない走行を行う場合における効率的な走行方法の提示に好適なナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置においては、目的地の設定および当該目的地までの最適経路の探索を行わずに、所望の行き先まで経路誘導をともなわずに走行(自走)する場合には、走行中に、地図上への自車の走行軌跡や自車位置の重畳表示は行われるものの、行き先までの所要時間、距離または燃費(電費)等を考慮した効率的な走行方法の提示は行われなかった。
【0003】
ここで、ナビゲーション装置を備えていながら経路誘導に頼らないケースは様々であるが、その1つには、ユーザの土地勘がある地域、例えば、自宅周辺、通勤/通学ルート周辺、営業エリア(タクシードライバー等の場合)、配達エリア(宅配/長距離ドライバー等の場合)または送迎エリア(送迎バスドライバー等の場合)等を走行する場合が挙げられる。このような場合には、ユーザは、地域の色々な道路を知っている場合が多く、経験や伝聞によって独自に知得した道路事情から、行き先までの所要時間や距離等の優劣を自己判断して、自分なりの最適な経路を把握していることが珍しくない。
【0004】
しかしながら、このようにユーザが自分なりに把握した最適な経路は、通い慣れた道路を利用するといった観点からは最適かも知れないが、純粋に所要時間や距離等の経路コストとして観た場合には、ユーザの思い違いであることが往々にしてあった。
【0005】
この点、特許文献1においては、ユーザが自走を行った場合に、自走区間の走行軌跡よりも有利な最適経路を事後的に探索してユーザに提示することによって、ユーザの思い込みを是正する機会を確保する技術が提案されている。
【0006】
また、特許文献2においては、自走の場合であっても、目的地を予測して混雑を回避した効率的な走行方法をアナウンスする技術が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−103716号公報
【特許文献2】特開2008−261714号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかるに、特許文献1においては、最適経路の事後的な探索を、自走が終了してナビゲーションシステムの電源が切断(オフ)された後、再び電源が投入(オン)されたことを契機として行うようになっているため、電源の切断から再投入まで時間が経っている場合には、ユーザの思い込みを直ちに是正することはできなかった。更に、こればかりでなく、例えば、自走が終了した日の翌日になって、電源を再投入して昨日の最適経路を事後的に探索するような場合には、自走終了地点を発たなければならないタイミングで最適経路が提示されるため、ユーザにとって、却って煩わしく新鮮さに欠けた有り難みがない情報が表示されることになる。
【0009】
また、特許文献2においては、過去の走行履歴に基づいて目的地を予測するようになっており、前述したユーザの土地勘がある地域のような走行経験(履歴)がある地域を走行する場合における効率的な走行方法のアナウンスに役立つようにも思えるが、ユーザが通い慣れた道路を利用するからといって常に同じ行き先に向かうとは限らないので、目的地の予測に失敗するリスクがあり、正確性に欠けるといった欠点がある。
【0010】
そこで、本発明は、このような点に鑑みなされたものであり、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができるナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前述した目的を達成するため、本発明に係るナビゲーション装置は、地図情報が記憶された地図情報記憶手段と、自車位置を算出する自車位置算出手段と、前記地図情報記憶手段に記憶された前記地図情報に基づいて、前記自車位置算出手段によって算出された前記自車位置から目的地までの最適経路を探索する経路探索手段と、この経路探索手段によって探索された前記最適経路にしたがった経路誘導を行う経路誘導手段とを備えたナビゲーション装置であって、前記算出された自車位置の変化に基づいて、自車の走行軌跡を記憶手段に記録する走行軌跡記録手段と、前記自車が前記経路誘導をともなわない自走を開始したことを契機として、当該自走を開始した際の前記算出された自車位置に該当する自走開始地点を記憶手段に記録する自走開始地点記録手段と、前記自車が前記自走を終了したことを検知する自走終了検知手段と、この自走終了検知手段による前記自走の終了の検知を契機として、当該自走を終了した際の前記算出された自車位置に該当する自走終了地点を記憶手段に記録する自走終了地点記録手段と、この自走終了地点記録手段による前記自走終了地点の記録後であって、ナビゲーション装置本体の電源の切断前に、前記経路探索手段に、前記自走開始地点記録手段によって記録された前記自走開始地点から前記自走終了地点記録手段によって記録された前記自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段と、この経路探索制御手段によって前記経路探索手段に探索させた前記自走地点間最適経路が、前記走行軌跡記録手段によって記録された前記走行軌跡における前記記録された自走開始地点から前記記録された自走終了地点までの区間の軌跡である自走区間走行軌跡と異なる場合に、当該探索させた自走地点間最適経路を、前記ナビゲーション装置本体の電源の切断前にユーザに提示する自走地点間最適経路提示手段とを備えたことを特徴としている。
【0012】
そして、このような構成によれば、自走地点間最適経路を、自走の終了後であってナビゲーション装置本体の電源の切断前に提示することによって、ユーザが自走を行った地点間の最適経路を即座に提示することができるので、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができる。
【0013】
また、前記自走終了検知手段は、前記自車のギアがパーキングに入れられたことを検出することによって、前記自走の終了を検知してもよい。
【0014】
そして、このような構成によれば、自走の終了を迅速かつ確実に検知することができ、ひいては、自走地点間最適経路の提示を更にすみやかに行うことができる。
【0015】
さらに、前記自走終了地点記録手段による前記自走終了地点の記録を契機として、前記自走地点間最適経路の探索を指示するための探索指示ボタンを表示部に表示する探索指示ボタン表示手段を備え、前記経路探索制御手段は、前記探索指示ボタン表示手段によって表示された前記探索指示ボタンの操作を契機として、前記経路探索手段に前記自走地点間最適経路を探索させてもよい。
【0016】
そして、このような構成によれば、簡便な操作によるユーザの意思確認を待って自走地点間最適経路を探索するため、ユーザの意向を反映した自走地点間最適経路の提示を迅速に行うことができる。
【0017】
さらにまた、前記自走地点間最適経路提示手段は、前記探索させた自走地点間最適経路の提示を、当該自走地点間最適経路が前記自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行ってもよい。
【0018】
そして、このような構成によれば、自走地点間最適経路の提示条件を経路コストの観点から厳しくすることによって、提示された自走地点間最適経路の利用価値を高めることができる。
【0019】
また、前記経路探索制御手段は、前記経路探索手段に、複数の経路探索条件ごとの前記自走地点間最適経路を探索させてもよい。
【0020】
そして、このような構成によれば、ユーザの多様な嗜好性に適応した自走地点間最適経路の提示を行うことができる。
【0021】
さらに、前記自走地点間最適経路提示手段による前記自走地点間最適経路の提示後であって、前記ナビゲーション装置本体の電源の切断前に、前記記録された自走終了地点に向かうと仮定した場合の出発地を、ユーザ操作に応じて設定する出発地設定手段を備え、前記経路探索制御手段は、前記出発地設定手段による前記出発地の設定を契機として、前記経路探索手段に、当該設定された出発地から前記記録された自走終了地点までの最適経路である出発地設定時最適経路を、前記ナビゲーション装置本体の電源の切断前に探索させ、前記ナビゲーション装置本体は、当該探索させた出発地設定時最適経路を、前記ナビゲーション装置の電源の切断前にユーザに提示する出発地設定時最適経路提示手段を備えてもよい。
【0022】
そして、このような構成によれば、自走地点間最適経路に加えて、出発地設定時最適経路を提示することができるので、利便性を向上させることができる。
【発明の効果】
【0023】
本発明によれば、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができる。
【図面の簡単な説明】
【0024】
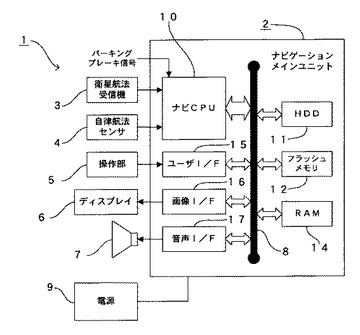
【図1】本発明に係るナビゲーション装置の第1実施形態を示す構成図
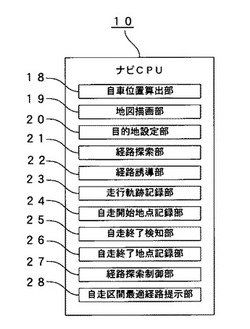
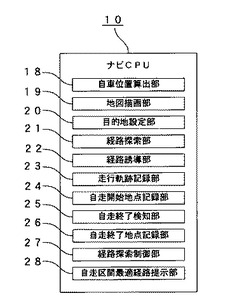
【図2】第1実施形態において、主要部の構成を示すブロック図
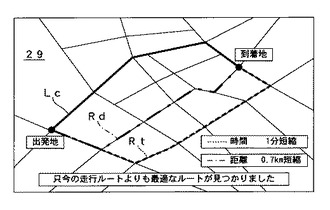
【図3】第1実施形態において、自走地点間最適経路の提示画面を示す模式図
【図4】第1実施形態を示すフローチャート
【図5】第1実施形態の変形例を示すフローチャート
【図6】本発明に係るナビゲーション装置の第2実施形態において、主要部の構成を示すブロック図
【図7】第2実施形態において、探索指示ボタンの表示状態を示す模式図
【図8】第2実施形態を示すフローチャート
【図9】本発明に係るナビゲーション装置の第3実施形態において、主要部の構成を示すブロック図
【図10】第3実施形態において、出発地設定時最適経路の提示画面を示す模式図
【図11】第3実施形態を示すフローチャート
【発明を実施するための形態】
【0025】
(第1実施形態)
以下、本発明に係るナビゲーション装置の第1実施形態について、図1乃至図5を参照して説明する。
【0026】
図1に示すように、本実施形態におけるナビゲーション装置1は、大別して、ナビゲーションメインユニット2と、このナビゲーションメインユニット2にそれぞれ接続された衛星航法受信機3、自律航法センサ4、操作部5、ディスプレイ6およびスピーカ7とによって構成されている。
【0027】
ここで、衛星航法受信機3は、図示しない測位衛星から配信される測位信号(時刻や軌道を示す信号)を受信し、受信した測位信号をナビゲーションメインユニット2側に出力するようになっている。この衛星航法受信機は、例えば、GPSレシーバ等であってもよい。
【0028】
また、自律航法センサ4は、自車の車速、加速度(角速度)および自車方位等を検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。この自律航法センサ4は、車速センサやジャイロセンサ等からなるものであってもよい。
【0029】
さらに、操作部5は、操作内容に応じた操作信号をナビゲーションメインユニット2側に出力することによって、ナビゲーション装置1に対する種々の操作を行うことが可能とされている。操作部5は、リモコン、ディスプレイ6のタッチパネル、リニアエンコーダ、ロータリエンコーダまたは音声入力用のマイクロホン等であってもよい。
【0030】
さらにまた、ナビゲーションメインユニット2には、車両側から、自車のギアがパーキングに入れられたことを示すパーキングブレーキ信号が入力されるようになっている。
【0031】
次に、ナビゲーションメインユニット2について詳述すると、図1に示すように、ナビゲーションメインユニット2は、システムバス8にそれぞれ接続されたナビCPU10、地図情報記憶手段としてのハードディスクドライブ(HDD)11、フラッシュメモリ12、RAM14、ユーザインターフェース(I/F)15、画像インターフェース(I/F)16および音声インターフェース(I/F)17を有している。
【0032】
ここで、ナビCPU10は、自車位置検出機能、地図表示機能、経路探索機能、経路誘導機能および検索機能等のナビゲーション装置1の各種の機能を実行するようになっている。
【0033】
また、ハードディスクドライブ11には、地図情報としての地図データが記憶されており、この地図データは、道路データフレーム、背景データフレーム、名称データフレーム、経路誘導データフレーム、経路計算データフレームおよび地点情報フレーム等の各種の物理データフレームによって構成されている。
【0034】
これらのうち、道路データフレームは、道路地図の表示等に用いられるようになっている。この道路データフレームには、リンク列データレコードが格納されており、このリンク列データレコードは、リンク列ヘッダ、リンク列の形状を示すリンク列形状情報、他のリンク列との関係を示すノード・リンク接続情報、ノード付加情報(リンクID、幅員・車線情報、道路名称等)、標高情報および通行規制情報等によって構成されている。
【0035】
また、背景データフレームは、背景地図の表示等に用いられるようになっている。この背景データフレームには、表示クラスごとにまとめられた図形データリスト列が格納されており、更に、各図形データリストには、図形(線または面)の形状を表現するための要素点座標情報(始点座標、オフセット座標等)が格納されている。
【0036】
さらに、名称データフレームは、地図上への文字列の表示等に用いられるようになっている。この名称データフレームには、表示クラスごとにまとめられた名称データリストが格納されており、この名称データリストは、名称データレコード列によって構成されている。この名称データフレームを用いて表示される文字列は、例えば、建物名、公園名、行政区画名および河川名等の表示クラスごとの表示対象地物の名称となる。
【0037】
さらにまた、経路誘導データフレームは、経路誘導に用いられるようになっており、この経路誘導データフレームには、誘導データフレーム、文字列データフレーム、形状データフレームおよびパターンデータフレーム等が格納されている。ここで、誘導データフレームには、交差点名称、道路名称および方面名称等が格納されている。また、文字列データフレームには、誘導データフレームと関連した実体の表示文字、発音文字およびアクセント情報等が格納されている。さらに、形状データフレームには、誘導データフレームと関連した実体を描画するための形状が格納されている。さらにまた、パターンデータフレームには、案内のために交差点の進入方向に応じた画像を描画するための実データが格納されている。
【0038】
また、経路計算データフレームは、目的地までの最適経路の計算に用いられるようになっており、この経路計算データフレームには、ノードデータフレーム、リンクデータフレーム、リンクコストデータフレーム、上位レベルノード・リンク対応データフレームおよびノード座標データフレーム等が格納されている。ここで、ノードデータフレームには、例えば、道路種別を複数まとめたランクの単位でノードデータが格納されている。また、リンクデータフレームには、リンクレコード、規制レコードおよびリンク間コストレコード等が格納されている。さらに、リンクコストデータフレームには、リンクIDやリンク自身のコスト等が格納されている。さらにまた、上位レベルノード・リンク対応データフレームには、当該レベルを基準とした上位のノードおよびリンクを特定する情報が格納されている。また、ノード座標データフレームには、ノードの座標が格納されている。
【0039】
さらに、地点情報フレームには地点情報が格納されている。この地点情報は、目的地または経由地の候補となる地点の検索や、地図上へのPOI(Points Of Interests)のアイコン(換言すれば、ランドマーク)の表示等に用いられるようになっている。この地点情報は、具体的には、地点の名称、位置(経緯度)、住所、郵便番号、電話番号、種別およびPOIのアイコン等によって構成されている。
【0040】
また、ハードディスクドライブ11には、ナビCPU10の実行プログラムが記憶されている。
【0041】
さらに、フラッシュメモリ12には、ナビゲーション装置1の起動とともにナビCPU10によってハードディスクドライブ11から読み出されたナビCPU10の実行プログラムが格納されるようになっており、この格納された実行プログラムがナビCPU10によって適宜実行されることによって、ナビゲーション装置1の各種の機能が適宜実行されるようになっている。
【0042】
さらにまた、RAM14は、ナビCPU10による処理結果等の各種のデータの一時的な保存等に用いられるようになっている。
【0043】
また、ユーザインターフェース15、画像インターフェース16および音声インターフェース17には、操作部5、ディスプレイ6およびスピーカ7がそれぞれ接続されている。
【0044】
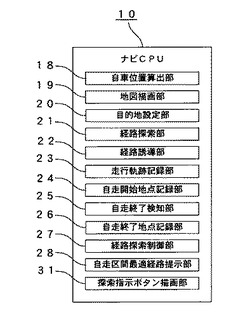
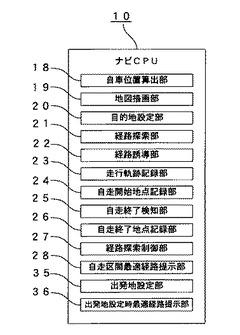
次に、ナビCPU10について更に詳述すると、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自車位置算出手段としての自車位置算出部18を有している。この自車位置算出部18には、衛星航法受信機3から出力された測位信号および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部18は、衛星航法受信機3側から入力された測位信号に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部18は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの相対的な変化分として算出する自律航法を行うようになっている。さらに、自車位置算出部18は、ハードディスクドライブ11に記憶されている地図データを用いることによって、衛星航法および自律航法(ハイブリッド航法)によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部18は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0045】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとしての地図描画部19を有している。この地図描画部19は、ハードディスクドライブ11に記憶されている地図データを用いることによって、所定の領域を示す地図をディスプレイ6に表示するようになっている。この地図描画部19によって表示される地図には、自車位置算出部18によって算出された自車位置の周辺の地図や、操作部5を用いたスクロール操作によって指定された領域の地図が含まれる。
【0046】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとしての目的地設定部20を有している。この目的地設定部20は、目的地を設定するための各種の操作画面をディスプレイ6に表示した上で、表示された操作画面に対する操作部5の操作に応じた目的地を設定するようになっている。
【0047】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路探索手段としての経路探索部21を有している。この経路探索部21は、ハードディスクドライブ11に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置から目的地設定部20によって設定された目的地までの予め設定された経路探索条件に応じた最適経路を、ダイクストラ法等の経路計算方法を用いて探索するようになっている。経路探索条件は、デフォルトで設定される場合もあるし、ユーザが操作部5を用いた入力操作によって設定する場合もある。このとき、目的地設定部20によって経由地が設定されている場合には、経路探索部21は、設定された経由地を経由するような目的地までの最適経路を探索するようになっている。そして、経路探索部21は、探索された最適経路を、ディスプレイ6への表示によって誘導経路の候補としてユーザに提示するようになっている。
【0048】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路誘導手段としての経路誘導部22を有している。この経路誘導部22は、経路探索部21によって提示された最適経路を誘導経路に設定するための操作部5を用いた入力操作が行われると、この最適経路を誘導経路に設定するようになっている。誘導経路の設定は、誘導経路に関する情報、例えばリンクおよび目的地等をRAM14等に保存することによって行うようにしてもよい。そして、経路誘導部22は、誘導経路の設定の後に、設定された誘導経路にしたがった経路誘導を行うようになっている。経路誘導においては、例えば、自車位置算出部18によって算出された自車位置が、誘導経路上の交差点に対して所定距離だけ手前の地点に到達したことを契機として、ハードディスクドライブ11内の地図データに基づいて、当該交差点を示す交差点拡大図のディスプレイ6への表示やスピーカ7を介した交差点右左折案内を行うようになっている。
【0049】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、走行軌跡記録手段としての走行軌跡記録部23を有している。この走行軌跡記録部23は、自車位置算出部18によって算出された自車位置の時間変化に基づいて、自車の走行軌跡を、ナビゲーション装置1の記憶手段(ハードディスクドライブ11、フラッシュメモリ12またはRAM14等)に記録するようになっている。この走行軌跡は、例えば、自車位置がマッチングされたリンクの集合(リンク列)として記録するようにしてもよい。また、走行軌跡の記録は、図1に示すナビゲーション装置1(ナビゲーション装置本体)の電源9(Acc電源であってもよい)の投入(オン)時から電源の切断(オフ)時まで継続的に行うようにしてもよい。さらに、走行軌跡の記録は、自車が後述する自走を行う場合だけでなく、経路誘導を受ける場合にも行うようにしてもよい。
【0050】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走開始地点記録手段としての自走開始地点記録部24を有している。この自走開始地点記録部24は、自車が経路誘導部22による経路誘導をともなわない走行である自走を開始したことを契機として、当該自走を開始した際の自車位置算出部18によって算出された自車位置に該当する地点である自走開始地点を、ナビゲーション装置1の記憶手段(11、12または14)に記録するようになっている。この自走開始地点の記録は、自走開始地点の位置(座標)情報を記録することや、自走開始地点に該当(マッチング)するリンクの識別情報(リンクID等)を記録すること等によって行うようにしてもよい。なお、自走が開始したことについては、例えば、ナビゲーション装置1の電源9の投入後、目的地設定部20による目的地の設定、経路探索部21による最適経路の探索および経路誘導部22による誘導経路の設定がなされていない状態で、初めての自車位置の変化が検出されたことによって検知してもよい。
【0051】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走終了検知手段としての自走終了検知部25を有している。この自走終了検知部25は、自走開始後において、車両側からのパーキングブレーキ信号の入力によって自車のギアがパーキングに入れられたことを検出することにより、自車が自走を終了したことを検知するようになっている。この自走の終了の検知は、もとよりナビゲーション装置1の電源9の切断前において行われる。
【0052】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走終了地点記録手段としての自走終了地点記録部26を有している。この自走終了地点記録部26は、自走終了検知部25による自走の終了の検知を契機として、直ちに、当該自走を終了した際の自車位置算出部18によって算出された自車位置に該当する地点である自走終了地点を、ナビゲーション装置1の記憶手段(11、12または14)に記録するようになっている。この自走終了地点の記録は、自走終了地点の位置(座標)情報を記録することや、自走終了地点に該当(マッチング)するリンクの識別情報(リンクID等)を記録すること等によって行うようにしてもよい。また、自走終了地点は、自走開始地点と同一の記憶手段に記録してもよいことは勿論である。このような自走終了地点の記録は、ナビゲーション装置1の電源9の切断前において行われるようになっている。
【0053】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路探索制御手段としての経路探索制御部27を有している。この経路探索制御部27は、自走終了地点記録部26による自走終了地点の記録を契機として、直ちに、経路探索部21への制御により、経路探索部21に、自走地点間最適経路を探索させるようになっている。ただし、自走地点間最適経路とは、自走開始地点記録部24によって記録された自走開始地点から自走終了地点記録部26によって記録された自走終了地点までの予め設定された経路探索条件に応じた最適経路のことである(以下、同様)。このような経路探索部21による自走地点間最適経路の探索は、ナビゲーション装置1の電源9の切断前に行われるようになっている。なお、自走地点間最適経路の探索は、目的地までの最適経路の探索と同様に、リンクコストに基づいた経路コスト計算によって行えばよい。例えば、経路探索条件として所要時間が最短であることを採用する場合には、経路コストとして、各リンクに対応付けられたリンク平均旅行時間に応じたコスト値の合算値を用いてもよい。このとき、リンク平均旅行時間が同一リンクに対して時間帯や曜日ごとに異なるのであれば、自走地点間最適経路の探索時の時刻/曜日を公知の時刻/曜日取得手段(車載機の時刻/カレンダー表示機能、GPS情報、ラジオ、インターネット等)によって取得した上で、取得された時刻/曜日に該当する時間帯/曜日のリンク平均旅行時間を選択して経路計算に利用すればよい。また、このとき、不図示のビーコン受信機やFM多重レシーバ等の交通情報取得手段によって取得された交通情報を加味してもよい。この場合に、交通情報としては、自走地点間最適経路の探索時点の交通情報を用いてもよい。さらに、このとき、過去の走行履歴として、所要時間を実際に記録したものがあるのであれば、この所要時間を、当該走行履歴に該当する道路のコストとして利用してもよい。また、この他にも、経路探索条件として距離が最短であることを採用する場合には、経路コストとして、各リンクに対応付けられたリンク長に応じたコスト値の合算値を用いてもよい。さらに、この他にも、経路探索条件として燃料または電力の消費量が最小であることを採用する場合には、経路コストとして、各リンクに対応付けられた平均燃費(電費)、道路勾配または道路種別(高速/一般)に応じたコストの合算値を用いてもよい。
【0054】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走地点間最適経路提示手段としての自走地点間最適経路提示部28を有している。この自走地点間最適経路提示部28は、経路探索制御部27の制御によって経路探索部21によって自走地点間最適経路が探索されたことを契機として、直ちに、探索された自走地点間最適経路が、自走区間走行軌跡と異なるか否かを判定するようになっている。ただし、自走区間走行軌跡とは、走行軌跡記録部23によって記録された走行軌跡における自走開始地点記録部24によって記録された自走開始地点から自走終了地点記録部26によって記録された自走終了地点までの区間の軌跡のことである(以下、同様)。そして、自走地点間最適経路提示部28は、探索された自走地点間最適経路が自走区間走行軌跡と異なると判定されたことを契機として、直ちに、探索された自走地点間最適経路をユーザに提示するようになっている。この自走地点間最適経路の提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。自走地点間最適経路の提示は、地図画面上への自走地点間最適経路に該当する道路の強調表示によって行うようにしてもよい。また、この場合に、自走地点間最適経路の表示は、自走区間走行軌跡の表示とともに行うことが望ましい。より好ましくは、自走地点間最適経路の提示は、自走地点間最適経路の経路探索条件に応じた経路コストにおいて自走区間走行軌跡に比べてどの程度有利であるかを示す情報の提示をともなうようにする。この場合に、自走区間走行軌跡の経路コストについては、自走区間走行軌跡がマッチングされている各リンクの経路探索条件に応じたリンクコストを用いて算出すればよい。
【0055】
上記構成に加えて、更に、本実施形態において、経路探索制御部27は、経路探索部21に、複数の経路探索条件ごとの自走地点間最適経路を探索させるようになっている。したがって、自走地点間最適経路提示部28は、各経路探索条件ごとの自走地点間最適経路を、自走区間走行軌跡と異なることを条件として個別に提示するようになっている。なお、各経路探索条件としては、所要時間が最短であること、距離が最短であること、燃料(電力)の消費量が最小であること等の複数の条件を挙げることができる。
【0056】
このような構成によれば、自走地点間最適経路を、自走の終了後であってナビゲーション装置1の電源9の切断前に提示することができるので、ユーザは、自走してきた経路が自走地点間最適経路と異なる場合に、最も効率的な走行をしてきたとの自らの思い込みを即座に是正することができ、次回以降同じ地域を走行する場合における効率的な走行に活かすことができる。また、経路探索条件に応じた複数の自走地点間最適経路を提示することができるので、ユーザの多様な嗜好性に適応した自走地点間最適経路の提示を行うことができる。
【0057】
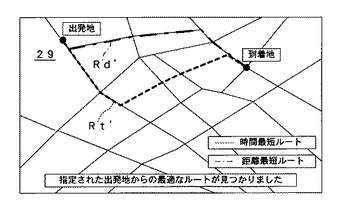
ここで、図3は、自走地点間最適経路の具体的な提示状態の一例を示したものである。図3においては、地図画面29上に、出発地(自走開始地点)から到着地(自走終了地点)までの2種類の自走地点間最適経路の強調表示画像Rt、Rdが重畳表示されている。このうち、Rtは、到着地までの所要時間が最短であることを経路探索条件として探索された時間優先の自走地点間最適経路を示すものであり、Rdは、到着地までの距離が最短であることを経路探索条件として探索された距離優先の自走地点間最適経路を示すものである。また、地図画面29上には、自走地点間最適経路の比較対象として、自走区間走行軌跡の強調表示画像Lcも表示されている。さらに、地図画面29上には、時間優先の自走地点間最適経路についての自走区間走行軌跡に対する所要時間の短縮時間および距離優先の自走地点間最適経路についての自走区間走行軌跡に対する短縮距離が表示されている。
【0058】
次に、本実施形態の処理工程について図4のフローチャートを参照して説明する。
【0059】
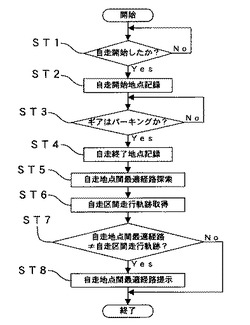
なお、便宜上、初期状態においては、ナビゲーション装置1の電源9が投入された直後であり、自車位置算出部18による自車位置の算出処理および走行軌跡記録部23による走行軌跡の記録処理は開始されているが、算出された自車位置の変化はなく、走行軌跡も電源9投入時点から変化を示さない状態であり、自走は開始されていないものとする。
【0060】
そして、初期状態から、まず、図4のステップ1(ST1)において、自走開始地点記録部24により、自車の自走が開始されたか否かを判定する。そして、ステップ1(ST1)において肯定的な判定結果が得られた場合には、ステップ2(ST2)に進み、否定的な判定結果が得られた場合には、ステップ1(ST1)を繰り返す。
【0061】
次いで、ステップ2(ST2)において、自走開始地点記録部24により、自走開始地点をナビゲーション装置1の記憶手段に記録する。
【0062】
次いで、ステップ3(ST3)において、自走終了検知部25により、パーキングブレーキ信号の入力の有無に基づいて、自車のギアがパーキングに入れられたか否かを判定する。そして、ステップ3(ST3)において肯定的な判定結果が得られた場合には、自走の終了を検知してステップ4(ST4)に進み、否定的な判定結果が得られた場合には、自走の未了を検知してステップ3(ST3)を繰り返す。
【0063】
次いで、ステップ4(ST4)において、自走終了地点記録部26により、自走終了地点をナビゲーション装置1の記憶手段に記録する。
【0064】
次いで、ステップ5(ST5)において、経路探索制御部27による制御の下で、経路探索部21により、ステップ2(ST2)において記録された自走開始地点およびステップ4(ST4)において記録された自走終了地点に基づいて、自走地点間最適経路の探索を行う。
【0065】
次いで、ステップ6(ST6)において、自走地点間最適経路提示部28により、ステップ2(ST2)において記録された自走開始地点およびステップ4(ST4)において記録された自走終了地点に基づいて、走行軌跡記録部23の記録結果から自走区間走行軌跡を取得する。このとき、初期状態以前の走行軌跡の記録結果(履歴)が記憶手段内に一切存在しないのであれば、初期状態からの走行軌跡の記録結果が、そのまま自走区間走行軌跡として取得される。
【0066】
次いで、ステップ7(ST7)において、自走地点間最適経路提示部28により、ステップ5(ST5)において探索された自走地点間最適経路が、ステップ6(ST6)において取得された自走区間走行軌跡と異なるか否かを判定する。そして、ステップ7(ST7)において肯定的な判定結果が得られた場合には、ステップ8(ST8)に進み、否定的な判定結果が得られた場合には、処理を終了する。このとき、処理を終了する場合には、自走区間走行軌跡が最適経路ということになるので、今来た道が最適であることをユーザに通知してもよい。
【0067】
次いで、ステップ8(ST8)において、自走地点間最適経路提示部28により、自走地点間最適経路をユーザに提示して処理を終了する。その後は、ナビゲーション装置1の電源9をユーザ操作(Accオフ操作等)を待って切断すればよい。
【0068】
(変形例)
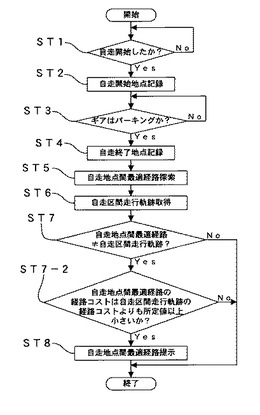
なお、変形例として、自走地点間最適経路提示部28は、経路探索部21によって探索された自走地点間最適経路の提示を、当該自走地点間最適経路が自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行うようにしてもよい。例えば、時間優先の自走地点間最適経路の場合には、自走区間走行軌跡に対して所要時間が3分以上短縮される場合に提示するようにしてもよく、また、距離優先の自走地点間最適経路の場合には、自走区間走行軌跡に対して距離が1km以上短縮される場合に提示するようにしてもよい。
【0069】
このような構成によれば、自走地点間最適経路の提示条件を経路コストの観点から厳しくすることによって、提示された自走地点間最適経路の利用価値を高めることができる。
【0070】
本変形例の処理工程は、図5に示すように、図4に示したフローチャートに対して、ステップ7(ST7)とステップ8(ST8)との間に、自走地点間最適経路の経路コストが自走区間走行軌跡の経路コストよりも所定値以上小さいか否かを判定するステップ7−2(ST7−2)が加わっている。ステップ7−2(ST7−2)において肯定的な判定結果が得られた場合には、ステップ8(ST8)に進んで自走地点間最適経路を提示し、否定的な判定結果が得られた場合には、処理を終了する。
【0071】
(第2実施形態)
次に、本発明に係るナビゲーション装置の第2実施形態について、第1実施形態との差異を中心として、図6乃至図8を参照して説明する。
【0072】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0073】
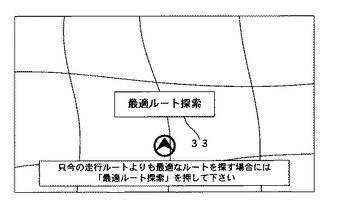
図6に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、第1実施形態の構成に加えて、更に、探索指示ボタン表示手段としての探索指示ボタン描画部31を有している。この探索指示ボタン描画部31は、自走終了地点記録部26による自走終了地点の記録を契機として、直ちに、図7に示すように、自走地点間最適経路の探索を指示するための探索指示ボタン33をディスプレイ6に表示するようになっている。この探索指示ボタン33は、操作部5によって操作可能とされている。このような探索指示ボタン33の表示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0074】
そして、本実施形態において、経路探索制御部27は、探索指示ボタン描画部31によって表示された探索指示ボタン33の操作を契機として、直ちに、経路探索部21に自走地点間最適経路を探索させるようになっている。なお、本実施形態においても、第1実施形態と同様に、自走地点間最適経路の探索および提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0075】
このような構成によれば、簡便な操作によるユーザの意思確認を待って自走地点間最適経路を探索するため、ユーザの意向を反映した自走地点間最適経路の提示を迅速に行うことができる。
【0076】
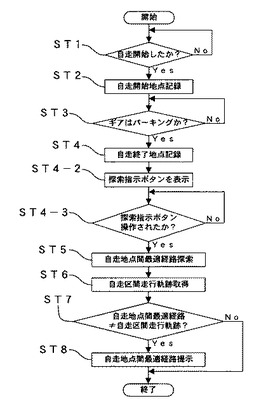
本実施形態の処理工程は、図8に示すように、図4に示したフローチャートに対して、ステップ4(ST4)とステップ5(ST5)との間に、自走地点間最適経路を探索するためのユーザの意思確認を行うステップ4−2(ST4−2)およびステップ4−3(ST4−3)の各工程が追加されている。
【0077】
すなわち、ステップ4−2(ST4−2)においては、探索指示ボタン描画部31により、探索指示ボタンの表示を行ってステップ4−3(ST4−3)に進む。
【0078】
次いで、ステップ4−3(ST4−3)において、経路探索制御部27により、ステップ4−2(ST4−2)において表示された探索指示ボタンが操作されたか否かを判定する。そして、ステップ4−3(ST4−3)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ4−3(ST4−3)を繰り返す。
【0079】
なお、本実施形態に、第1実施形態の変形例を組み合わせてもよい。
【0080】
(第3実施形態)
次に、本発明に係るナビゲーション装置の第3実施形態について、第1実施形態との差異を中心として、図9乃至図11を参照して説明する。
【0081】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0082】
図9に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、第1実施形態の構成に加えて、更に、出発地設定手段としての出発地設定部35を有している。この出発地設定部35は、自走地点間最適経路提示部28による自走地点間最適経路の提示を契機として、直ちに、走行終了地点に向かうと仮定した場合の出発地の設定操作を許容するようになっている。具体的には、出発地設定部35は、出発地の設定操作が可能な操作画面をディスプレイ6に表示するようになっている。この場合に、操作画面は、自走地点間最適経路が提示されている地図画面(図3参照)上の所望の地点を出発地としてタッチまたはカーソル指定する操作を許容する画面であってもよい。このとき、出発地の設定が可能である旨をユーザにメッセージ表示や音声案内によって通知することが望ましい。そして、このような操作画面に対して操作部5を用いた出発地の設定操作が行われた場合には、出発地設定部35は、設定操作に応じた地点を出発地として設定するようになっている。このような出発地の設定は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0083】
そして、本実施形態において、経路探索制御部27は、出発地設定部35による出発地の設定を契機として、直ちに、経路探索部21に出発地設定時最適経路を探索させるようになっている。ただし、出発地設定時最適経路とは、出発地設定部35によって設定された出発地から自走終了地点記録部26によって記録された自走終了地点までの予め設定された経路探索条件に応じた最適経路のことである(以下、同様)。この出発地設定時最適経路の探索は、ナビゲーション装置1の電源9の切断前に行われるようになっている。この出発地設定時最適経路の探索は、自走地点間最適経路の探索と同様に、リンクコストに基づいた経路コスト計算によって行えばよい。
【0084】
さらに、図9に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、出発地設定時最適経路提示手段としての出発地設定時最適経路提示部36を有している。この出発地設定時最適経路提示部36は、経路探索部21による出発地設定時最適経路の探索を契機として、探索された出発地設定時最適経路を直ちにユーザに提示するようになっている。この出発地設定時最適経路の提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。出発地設定時最適経路の提示は、自走地点間最適経路の場合と同様に、図10に示すように、地図画面上への出発地設定時最適経路に該当する道路の強調表示画像Rt’、Rd’の表示によって行うようにしてもよい。
【0085】
このような構成によれば、自走地点間最適経路に加えて、出発地設定時最適経路を提示することができるので、利便性を向上させることができる。
【0086】
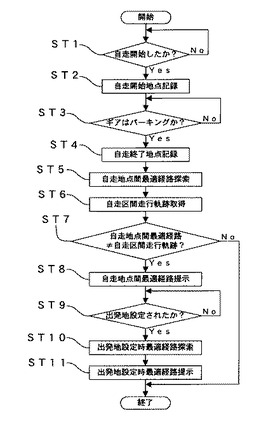
本実施形態の処理工程は、図11に示すように、図4に示したフローチャートに対して、ステップ8(ST8)の後に、出発地設定時最適経路を提示するためのステップ9(ST9)〜ステップ11(ST11)の一連の工程が加わっている。
【0087】
すなわち、ステップ9(ST9)においては、経路探索制御部27により、出発地設定部35による出発地の設定が行われたか否かを判定する。そして、ステップ9(ST9)において肯定的な判定結果が得られた場合には、ステップ10(ST10)に進み、否定的な判定結果が得られた場合には、ステップ9(ST9)を繰り返す。
【0088】
次いで、ステップ10(ST10)において、経路探索制御部27の制御の下で、経路探索部21による出発地設定時最適経路の探索を行う。
【0089】
次いで、ステップ11(ST11)において、出発地設定時最適経路提示部36により、ステップ10(ST10)において探索された出発地設定時最適経路をユーザに提示して処理を終了する。
【0090】
なお、本実施形態に、第1実施形態の変形例および第2実施形態の少なくとも一方を組み合わせてもよい。
【0091】
また、本発明は、前述した実施の形態に限定されるものではなく、本発明の特徴を損なわない限度において種々変更してもよい。
【0092】
例えば、提示した自走地点間最適経路を電源9の切断後においても記憶手段に保存しておき、電源9の再投入後にユーザ操作にともなっていつでも閲覧できるように構成してもよい。
【0093】
また、自走終了検知部25は、パーキング信号を取得すること以外の方法によって、電源9切断前における自走の終了を検知してもよい。例えば、自車の車速が、信号待ち等の航続中における一時停止とはみなされない状況においてゼロになったことに基づいて自走の終了を検知してもよい。このようなケースとしては、例えば、自車位置がマッチングされるべきリンクが存在しないことや駐車場の代表座標点と自車位置との距離が閾値以下である等の自車が駐車場内に進入したとみなすことができる状態において、車速がゼロになったことを挙げることができる。この場合には、自車が最後にマッチングされていたリンクを自走終了地点とみなしてもよい。
【符号の説明】
【0094】
1 ナビゲーション装置
11 ハードディスクドライブ
18 自車位置算出部
21 経路探索部
22 経路誘導部
23 走行軌跡記録部
24 自走開始地点記録部
25 自走終了検知部
26 自走終了地点記録部
27 経路探索制御部
28 自走地点間最適経路提示部
【技術分野】
【0001】
本発明は、ナビゲーション装置に係り、特に、経路誘導をともなわない走行を行う場合における効率的な走行方法の提示に好適なナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置においては、目的地の設定および当該目的地までの最適経路の探索を行わずに、所望の行き先まで経路誘導をともなわずに走行(自走)する場合には、走行中に、地図上への自車の走行軌跡や自車位置の重畳表示は行われるものの、行き先までの所要時間、距離または燃費(電費)等を考慮した効率的な走行方法の提示は行われなかった。
【0003】
ここで、ナビゲーション装置を備えていながら経路誘導に頼らないケースは様々であるが、その1つには、ユーザの土地勘がある地域、例えば、自宅周辺、通勤/通学ルート周辺、営業エリア(タクシードライバー等の場合)、配達エリア(宅配/長距離ドライバー等の場合)または送迎エリア(送迎バスドライバー等の場合)等を走行する場合が挙げられる。このような場合には、ユーザは、地域の色々な道路を知っている場合が多く、経験や伝聞によって独自に知得した道路事情から、行き先までの所要時間や距離等の優劣を自己判断して、自分なりの最適な経路を把握していることが珍しくない。
【0004】
しかしながら、このようにユーザが自分なりに把握した最適な経路は、通い慣れた道路を利用するといった観点からは最適かも知れないが、純粋に所要時間や距離等の経路コストとして観た場合には、ユーザの思い違いであることが往々にしてあった。
【0005】
この点、特許文献1においては、ユーザが自走を行った場合に、自走区間の走行軌跡よりも有利な最適経路を事後的に探索してユーザに提示することによって、ユーザの思い込みを是正する機会を確保する技術が提案されている。
【0006】
また、特許文献2においては、自走の場合であっても、目的地を予測して混雑を回避した効率的な走行方法をアナウンスする技術が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−103716号公報
【特許文献2】特開2008−261714号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかるに、特許文献1においては、最適経路の事後的な探索を、自走が終了してナビゲーションシステムの電源が切断(オフ)された後、再び電源が投入(オン)されたことを契機として行うようになっているため、電源の切断から再投入まで時間が経っている場合には、ユーザの思い込みを直ちに是正することはできなかった。更に、こればかりでなく、例えば、自走が終了した日の翌日になって、電源を再投入して昨日の最適経路を事後的に探索するような場合には、自走終了地点を発たなければならないタイミングで最適経路が提示されるため、ユーザにとって、却って煩わしく新鮮さに欠けた有り難みがない情報が表示されることになる。
【0009】
また、特許文献2においては、過去の走行履歴に基づいて目的地を予測するようになっており、前述したユーザの土地勘がある地域のような走行経験(履歴)がある地域を走行する場合における効率的な走行方法のアナウンスに役立つようにも思えるが、ユーザが通い慣れた道路を利用するからといって常に同じ行き先に向かうとは限らないので、目的地の予測に失敗するリスクがあり、正確性に欠けるといった欠点がある。
【0010】
そこで、本発明は、このような点に鑑みなされたものであり、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができるナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
前述した目的を達成するため、本発明に係るナビゲーション装置は、地図情報が記憶された地図情報記憶手段と、自車位置を算出する自車位置算出手段と、前記地図情報記憶手段に記憶された前記地図情報に基づいて、前記自車位置算出手段によって算出された前記自車位置から目的地までの最適経路を探索する経路探索手段と、この経路探索手段によって探索された前記最適経路にしたがった経路誘導を行う経路誘導手段とを備えたナビゲーション装置であって、前記算出された自車位置の変化に基づいて、自車の走行軌跡を記憶手段に記録する走行軌跡記録手段と、前記自車が前記経路誘導をともなわない自走を開始したことを契機として、当該自走を開始した際の前記算出された自車位置に該当する自走開始地点を記憶手段に記録する自走開始地点記録手段と、前記自車が前記自走を終了したことを検知する自走終了検知手段と、この自走終了検知手段による前記自走の終了の検知を契機として、当該自走を終了した際の前記算出された自車位置に該当する自走終了地点を記憶手段に記録する自走終了地点記録手段と、この自走終了地点記録手段による前記自走終了地点の記録後であって、ナビゲーション装置本体の電源の切断前に、前記経路探索手段に、前記自走開始地点記録手段によって記録された前記自走開始地点から前記自走終了地点記録手段によって記録された前記自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段と、この経路探索制御手段によって前記経路探索手段に探索させた前記自走地点間最適経路が、前記走行軌跡記録手段によって記録された前記走行軌跡における前記記録された自走開始地点から前記記録された自走終了地点までの区間の軌跡である自走区間走行軌跡と異なる場合に、当該探索させた自走地点間最適経路を、前記ナビゲーション装置本体の電源の切断前にユーザに提示する自走地点間最適経路提示手段とを備えたことを特徴としている。
【0012】
そして、このような構成によれば、自走地点間最適経路を、自走の終了後であってナビゲーション装置本体の電源の切断前に提示することによって、ユーザが自走を行った地点間の最適経路を即座に提示することができるので、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができる。
【0013】
また、前記自走終了検知手段は、前記自車のギアがパーキングに入れられたことを検出することによって、前記自走の終了を検知してもよい。
【0014】
そして、このような構成によれば、自走の終了を迅速かつ確実に検知することができ、ひいては、自走地点間最適経路の提示を更にすみやかに行うことができる。
【0015】
さらに、前記自走終了地点記録手段による前記自走終了地点の記録を契機として、前記自走地点間最適経路の探索を指示するための探索指示ボタンを表示部に表示する探索指示ボタン表示手段を備え、前記経路探索制御手段は、前記探索指示ボタン表示手段によって表示された前記探索指示ボタンの操作を契機として、前記経路探索手段に前記自走地点間最適経路を探索させてもよい。
【0016】
そして、このような構成によれば、簡便な操作によるユーザの意思確認を待って自走地点間最適経路を探索するため、ユーザの意向を反映した自走地点間最適経路の提示を迅速に行うことができる。
【0017】
さらにまた、前記自走地点間最適経路提示手段は、前記探索させた自走地点間最適経路の提示を、当該自走地点間最適経路が前記自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行ってもよい。
【0018】
そして、このような構成によれば、自走地点間最適経路の提示条件を経路コストの観点から厳しくすることによって、提示された自走地点間最適経路の利用価値を高めることができる。
【0019】
また、前記経路探索制御手段は、前記経路探索手段に、複数の経路探索条件ごとの前記自走地点間最適経路を探索させてもよい。
【0020】
そして、このような構成によれば、ユーザの多様な嗜好性に適応した自走地点間最適経路の提示を行うことができる。
【0021】
さらに、前記自走地点間最適経路提示手段による前記自走地点間最適経路の提示後であって、前記ナビゲーション装置本体の電源の切断前に、前記記録された自走終了地点に向かうと仮定した場合の出発地を、ユーザ操作に応じて設定する出発地設定手段を備え、前記経路探索制御手段は、前記出発地設定手段による前記出発地の設定を契機として、前記経路探索手段に、当該設定された出発地から前記記録された自走終了地点までの最適経路である出発地設定時最適経路を、前記ナビゲーション装置本体の電源の切断前に探索させ、前記ナビゲーション装置本体は、当該探索させた出発地設定時最適経路を、前記ナビゲーション装置の電源の切断前にユーザに提示する出発地設定時最適経路提示手段を備えてもよい。
【0022】
そして、このような構成によれば、自走地点間最適経路に加えて、出発地設定時最適経路を提示することができるので、利便性を向上させることができる。
【発明の効果】
【0023】
本発明によれば、ユーザが自走を行う場合における効率的な走行方法の提示を、最適なタイミングで正確に行うことができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係るナビゲーション装置の第1実施形態を示す構成図
【図2】第1実施形態において、主要部の構成を示すブロック図
【図3】第1実施形態において、自走地点間最適経路の提示画面を示す模式図
【図4】第1実施形態を示すフローチャート
【図5】第1実施形態の変形例を示すフローチャート
【図6】本発明に係るナビゲーション装置の第2実施形態において、主要部の構成を示すブロック図
【図7】第2実施形態において、探索指示ボタンの表示状態を示す模式図
【図8】第2実施形態を示すフローチャート
【図9】本発明に係るナビゲーション装置の第3実施形態において、主要部の構成を示すブロック図
【図10】第3実施形態において、出発地設定時最適経路の提示画面を示す模式図
【図11】第3実施形態を示すフローチャート
【発明を実施するための形態】
【0025】
(第1実施形態)
以下、本発明に係るナビゲーション装置の第1実施形態について、図1乃至図5を参照して説明する。
【0026】
図1に示すように、本実施形態におけるナビゲーション装置1は、大別して、ナビゲーションメインユニット2と、このナビゲーションメインユニット2にそれぞれ接続された衛星航法受信機3、自律航法センサ4、操作部5、ディスプレイ6およびスピーカ7とによって構成されている。
【0027】
ここで、衛星航法受信機3は、図示しない測位衛星から配信される測位信号(時刻や軌道を示す信号)を受信し、受信した測位信号をナビゲーションメインユニット2側に出力するようになっている。この衛星航法受信機は、例えば、GPSレシーバ等であってもよい。
【0028】
また、自律航法センサ4は、自車の車速、加速度(角速度)および自車方位等を検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。この自律航法センサ4は、車速センサやジャイロセンサ等からなるものであってもよい。
【0029】
さらに、操作部5は、操作内容に応じた操作信号をナビゲーションメインユニット2側に出力することによって、ナビゲーション装置1に対する種々の操作を行うことが可能とされている。操作部5は、リモコン、ディスプレイ6のタッチパネル、リニアエンコーダ、ロータリエンコーダまたは音声入力用のマイクロホン等であってもよい。
【0030】
さらにまた、ナビゲーションメインユニット2には、車両側から、自車のギアがパーキングに入れられたことを示すパーキングブレーキ信号が入力されるようになっている。
【0031】
次に、ナビゲーションメインユニット2について詳述すると、図1に示すように、ナビゲーションメインユニット2は、システムバス8にそれぞれ接続されたナビCPU10、地図情報記憶手段としてのハードディスクドライブ(HDD)11、フラッシュメモリ12、RAM14、ユーザインターフェース(I/F)15、画像インターフェース(I/F)16および音声インターフェース(I/F)17を有している。
【0032】
ここで、ナビCPU10は、自車位置検出機能、地図表示機能、経路探索機能、経路誘導機能および検索機能等のナビゲーション装置1の各種の機能を実行するようになっている。
【0033】
また、ハードディスクドライブ11には、地図情報としての地図データが記憶されており、この地図データは、道路データフレーム、背景データフレーム、名称データフレーム、経路誘導データフレーム、経路計算データフレームおよび地点情報フレーム等の各種の物理データフレームによって構成されている。
【0034】
これらのうち、道路データフレームは、道路地図の表示等に用いられるようになっている。この道路データフレームには、リンク列データレコードが格納されており、このリンク列データレコードは、リンク列ヘッダ、リンク列の形状を示すリンク列形状情報、他のリンク列との関係を示すノード・リンク接続情報、ノード付加情報(リンクID、幅員・車線情報、道路名称等)、標高情報および通行規制情報等によって構成されている。
【0035】
また、背景データフレームは、背景地図の表示等に用いられるようになっている。この背景データフレームには、表示クラスごとにまとめられた図形データリスト列が格納されており、更に、各図形データリストには、図形(線または面)の形状を表現するための要素点座標情報(始点座標、オフセット座標等)が格納されている。
【0036】
さらに、名称データフレームは、地図上への文字列の表示等に用いられるようになっている。この名称データフレームには、表示クラスごとにまとめられた名称データリストが格納されており、この名称データリストは、名称データレコード列によって構成されている。この名称データフレームを用いて表示される文字列は、例えば、建物名、公園名、行政区画名および河川名等の表示クラスごとの表示対象地物の名称となる。
【0037】
さらにまた、経路誘導データフレームは、経路誘導に用いられるようになっており、この経路誘導データフレームには、誘導データフレーム、文字列データフレーム、形状データフレームおよびパターンデータフレーム等が格納されている。ここで、誘導データフレームには、交差点名称、道路名称および方面名称等が格納されている。また、文字列データフレームには、誘導データフレームと関連した実体の表示文字、発音文字およびアクセント情報等が格納されている。さらに、形状データフレームには、誘導データフレームと関連した実体を描画するための形状が格納されている。さらにまた、パターンデータフレームには、案内のために交差点の進入方向に応じた画像を描画するための実データが格納されている。
【0038】
また、経路計算データフレームは、目的地までの最適経路の計算に用いられるようになっており、この経路計算データフレームには、ノードデータフレーム、リンクデータフレーム、リンクコストデータフレーム、上位レベルノード・リンク対応データフレームおよびノード座標データフレーム等が格納されている。ここで、ノードデータフレームには、例えば、道路種別を複数まとめたランクの単位でノードデータが格納されている。また、リンクデータフレームには、リンクレコード、規制レコードおよびリンク間コストレコード等が格納されている。さらに、リンクコストデータフレームには、リンクIDやリンク自身のコスト等が格納されている。さらにまた、上位レベルノード・リンク対応データフレームには、当該レベルを基準とした上位のノードおよびリンクを特定する情報が格納されている。また、ノード座標データフレームには、ノードの座標が格納されている。
【0039】
さらに、地点情報フレームには地点情報が格納されている。この地点情報は、目的地または経由地の候補となる地点の検索や、地図上へのPOI(Points Of Interests)のアイコン(換言すれば、ランドマーク)の表示等に用いられるようになっている。この地点情報は、具体的には、地点の名称、位置(経緯度)、住所、郵便番号、電話番号、種別およびPOIのアイコン等によって構成されている。
【0040】
また、ハードディスクドライブ11には、ナビCPU10の実行プログラムが記憶されている。
【0041】
さらに、フラッシュメモリ12には、ナビゲーション装置1の起動とともにナビCPU10によってハードディスクドライブ11から読み出されたナビCPU10の実行プログラムが格納されるようになっており、この格納された実行プログラムがナビCPU10によって適宜実行されることによって、ナビゲーション装置1の各種の機能が適宜実行されるようになっている。
【0042】
さらにまた、RAM14は、ナビCPU10による処理結果等の各種のデータの一時的な保存等に用いられるようになっている。
【0043】
また、ユーザインターフェース15、画像インターフェース16および音声インターフェース17には、操作部5、ディスプレイ6およびスピーカ7がそれぞれ接続されている。
【0044】
次に、ナビCPU10について更に詳述すると、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自車位置算出手段としての自車位置算出部18を有している。この自車位置算出部18には、衛星航法受信機3から出力された測位信号および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部18は、衛星航法受信機3側から入力された測位信号に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部18は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの相対的な変化分として算出する自律航法を行うようになっている。さらに、自車位置算出部18は、ハードディスクドライブ11に記憶されている地図データを用いることによって、衛星航法および自律航法(ハイブリッド航法)によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部18は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0045】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとしての地図描画部19を有している。この地図描画部19は、ハードディスクドライブ11に記憶されている地図データを用いることによって、所定の領域を示す地図をディスプレイ6に表示するようになっている。この地図描画部19によって表示される地図には、自車位置算出部18によって算出された自車位置の周辺の地図や、操作部5を用いたスクロール操作によって指定された領域の地図が含まれる。
【0046】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとしての目的地設定部20を有している。この目的地設定部20は、目的地を設定するための各種の操作画面をディスプレイ6に表示した上で、表示された操作画面に対する操作部5の操作に応じた目的地を設定するようになっている。
【0047】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路探索手段としての経路探索部21を有している。この経路探索部21は、ハードディスクドライブ11に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置から目的地設定部20によって設定された目的地までの予め設定された経路探索条件に応じた最適経路を、ダイクストラ法等の経路計算方法を用いて探索するようになっている。経路探索条件は、デフォルトで設定される場合もあるし、ユーザが操作部5を用いた入力操作によって設定する場合もある。このとき、目的地設定部20によって経由地が設定されている場合には、経路探索部21は、設定された経由地を経由するような目的地までの最適経路を探索するようになっている。そして、経路探索部21は、探索された最適経路を、ディスプレイ6への表示によって誘導経路の候補としてユーザに提示するようになっている。
【0048】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路誘導手段としての経路誘導部22を有している。この経路誘導部22は、経路探索部21によって提示された最適経路を誘導経路に設定するための操作部5を用いた入力操作が行われると、この最適経路を誘導経路に設定するようになっている。誘導経路の設定は、誘導経路に関する情報、例えばリンクおよび目的地等をRAM14等に保存することによって行うようにしてもよい。そして、経路誘導部22は、誘導経路の設定の後に、設定された誘導経路にしたがった経路誘導を行うようになっている。経路誘導においては、例えば、自車位置算出部18によって算出された自車位置が、誘導経路上の交差点に対して所定距離だけ手前の地点に到達したことを契機として、ハードディスクドライブ11内の地図データに基づいて、当該交差点を示す交差点拡大図のディスプレイ6への表示やスピーカ7を介した交差点右左折案内を行うようになっている。
【0049】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、走行軌跡記録手段としての走行軌跡記録部23を有している。この走行軌跡記録部23は、自車位置算出部18によって算出された自車位置の時間変化に基づいて、自車の走行軌跡を、ナビゲーション装置1の記憶手段(ハードディスクドライブ11、フラッシュメモリ12またはRAM14等)に記録するようになっている。この走行軌跡は、例えば、自車位置がマッチングされたリンクの集合(リンク列)として記録するようにしてもよい。また、走行軌跡の記録は、図1に示すナビゲーション装置1(ナビゲーション装置本体)の電源9(Acc電源であってもよい)の投入(オン)時から電源の切断(オフ)時まで継続的に行うようにしてもよい。さらに、走行軌跡の記録は、自車が後述する自走を行う場合だけでなく、経路誘導を受ける場合にも行うようにしてもよい。
【0050】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走開始地点記録手段としての自走開始地点記録部24を有している。この自走開始地点記録部24は、自車が経路誘導部22による経路誘導をともなわない走行である自走を開始したことを契機として、当該自走を開始した際の自車位置算出部18によって算出された自車位置に該当する地点である自走開始地点を、ナビゲーション装置1の記憶手段(11、12または14)に記録するようになっている。この自走開始地点の記録は、自走開始地点の位置(座標)情報を記録することや、自走開始地点に該当(マッチング)するリンクの識別情報(リンクID等)を記録すること等によって行うようにしてもよい。なお、自走が開始したことについては、例えば、ナビゲーション装置1の電源9の投入後、目的地設定部20による目的地の設定、経路探索部21による最適経路の探索および経路誘導部22による誘導経路の設定がなされていない状態で、初めての自車位置の変化が検出されたことによって検知してもよい。
【0051】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走終了検知手段としての自走終了検知部25を有している。この自走終了検知部25は、自走開始後において、車両側からのパーキングブレーキ信号の入力によって自車のギアがパーキングに入れられたことを検出することにより、自車が自走を終了したことを検知するようになっている。この自走の終了の検知は、もとよりナビゲーション装置1の電源9の切断前において行われる。
【0052】
さらに、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走終了地点記録手段としての自走終了地点記録部26を有している。この自走終了地点記録部26は、自走終了検知部25による自走の終了の検知を契機として、直ちに、当該自走を終了した際の自車位置算出部18によって算出された自車位置に該当する地点である自走終了地点を、ナビゲーション装置1の記憶手段(11、12または14)に記録するようになっている。この自走終了地点の記録は、自走終了地点の位置(座標)情報を記録することや、自走終了地点に該当(マッチング)するリンクの識別情報(リンクID等)を記録すること等によって行うようにしてもよい。また、自走終了地点は、自走開始地点と同一の記憶手段に記録してもよいことは勿論である。このような自走終了地点の記録は、ナビゲーション装置1の電源9の切断前において行われるようになっている。
【0053】
さらにまた、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、経路探索制御手段としての経路探索制御部27を有している。この経路探索制御部27は、自走終了地点記録部26による自走終了地点の記録を契機として、直ちに、経路探索部21への制御により、経路探索部21に、自走地点間最適経路を探索させるようになっている。ただし、自走地点間最適経路とは、自走開始地点記録部24によって記録された自走開始地点から自走終了地点記録部26によって記録された自走終了地点までの予め設定された経路探索条件に応じた最適経路のことである(以下、同様)。このような経路探索部21による自走地点間最適経路の探索は、ナビゲーション装置1の電源9の切断前に行われるようになっている。なお、自走地点間最適経路の探索は、目的地までの最適経路の探索と同様に、リンクコストに基づいた経路コスト計算によって行えばよい。例えば、経路探索条件として所要時間が最短であることを採用する場合には、経路コストとして、各リンクに対応付けられたリンク平均旅行時間に応じたコスト値の合算値を用いてもよい。このとき、リンク平均旅行時間が同一リンクに対して時間帯や曜日ごとに異なるのであれば、自走地点間最適経路の探索時の時刻/曜日を公知の時刻/曜日取得手段(車載機の時刻/カレンダー表示機能、GPS情報、ラジオ、インターネット等)によって取得した上で、取得された時刻/曜日に該当する時間帯/曜日のリンク平均旅行時間を選択して経路計算に利用すればよい。また、このとき、不図示のビーコン受信機やFM多重レシーバ等の交通情報取得手段によって取得された交通情報を加味してもよい。この場合に、交通情報としては、自走地点間最適経路の探索時点の交通情報を用いてもよい。さらに、このとき、過去の走行履歴として、所要時間を実際に記録したものがあるのであれば、この所要時間を、当該走行履歴に該当する道路のコストとして利用してもよい。また、この他にも、経路探索条件として距離が最短であることを採用する場合には、経路コストとして、各リンクに対応付けられたリンク長に応じたコスト値の合算値を用いてもよい。さらに、この他にも、経路探索条件として燃料または電力の消費量が最小であることを採用する場合には、経路コストとして、各リンクに対応付けられた平均燃費(電費)、道路勾配または道路種別(高速/一般)に応じたコストの合算値を用いてもよい。
【0054】
また、図2に示すように、ナビCPU10は、その機能ブロックの1つとして、自走地点間最適経路提示手段としての自走地点間最適経路提示部28を有している。この自走地点間最適経路提示部28は、経路探索制御部27の制御によって経路探索部21によって自走地点間最適経路が探索されたことを契機として、直ちに、探索された自走地点間最適経路が、自走区間走行軌跡と異なるか否かを判定するようになっている。ただし、自走区間走行軌跡とは、走行軌跡記録部23によって記録された走行軌跡における自走開始地点記録部24によって記録された自走開始地点から自走終了地点記録部26によって記録された自走終了地点までの区間の軌跡のことである(以下、同様)。そして、自走地点間最適経路提示部28は、探索された自走地点間最適経路が自走区間走行軌跡と異なると判定されたことを契機として、直ちに、探索された自走地点間最適経路をユーザに提示するようになっている。この自走地点間最適経路の提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。自走地点間最適経路の提示は、地図画面上への自走地点間最適経路に該当する道路の強調表示によって行うようにしてもよい。また、この場合に、自走地点間最適経路の表示は、自走区間走行軌跡の表示とともに行うことが望ましい。より好ましくは、自走地点間最適経路の提示は、自走地点間最適経路の経路探索条件に応じた経路コストにおいて自走区間走行軌跡に比べてどの程度有利であるかを示す情報の提示をともなうようにする。この場合に、自走区間走行軌跡の経路コストについては、自走区間走行軌跡がマッチングされている各リンクの経路探索条件に応じたリンクコストを用いて算出すればよい。
【0055】
上記構成に加えて、更に、本実施形態において、経路探索制御部27は、経路探索部21に、複数の経路探索条件ごとの自走地点間最適経路を探索させるようになっている。したがって、自走地点間最適経路提示部28は、各経路探索条件ごとの自走地点間最適経路を、自走区間走行軌跡と異なることを条件として個別に提示するようになっている。なお、各経路探索条件としては、所要時間が最短であること、距離が最短であること、燃料(電力)の消費量が最小であること等の複数の条件を挙げることができる。
【0056】
このような構成によれば、自走地点間最適経路を、自走の終了後であってナビゲーション装置1の電源9の切断前に提示することができるので、ユーザは、自走してきた経路が自走地点間最適経路と異なる場合に、最も効率的な走行をしてきたとの自らの思い込みを即座に是正することができ、次回以降同じ地域を走行する場合における効率的な走行に活かすことができる。また、経路探索条件に応じた複数の自走地点間最適経路を提示することができるので、ユーザの多様な嗜好性に適応した自走地点間最適経路の提示を行うことができる。
【0057】
ここで、図3は、自走地点間最適経路の具体的な提示状態の一例を示したものである。図3においては、地図画面29上に、出発地(自走開始地点)から到着地(自走終了地点)までの2種類の自走地点間最適経路の強調表示画像Rt、Rdが重畳表示されている。このうち、Rtは、到着地までの所要時間が最短であることを経路探索条件として探索された時間優先の自走地点間最適経路を示すものであり、Rdは、到着地までの距離が最短であることを経路探索条件として探索された距離優先の自走地点間最適経路を示すものである。また、地図画面29上には、自走地点間最適経路の比較対象として、自走区間走行軌跡の強調表示画像Lcも表示されている。さらに、地図画面29上には、時間優先の自走地点間最適経路についての自走区間走行軌跡に対する所要時間の短縮時間および距離優先の自走地点間最適経路についての自走区間走行軌跡に対する短縮距離が表示されている。
【0058】
次に、本実施形態の処理工程について図4のフローチャートを参照して説明する。
【0059】
なお、便宜上、初期状態においては、ナビゲーション装置1の電源9が投入された直後であり、自車位置算出部18による自車位置の算出処理および走行軌跡記録部23による走行軌跡の記録処理は開始されているが、算出された自車位置の変化はなく、走行軌跡も電源9投入時点から変化を示さない状態であり、自走は開始されていないものとする。
【0060】
そして、初期状態から、まず、図4のステップ1(ST1)において、自走開始地点記録部24により、自車の自走が開始されたか否かを判定する。そして、ステップ1(ST1)において肯定的な判定結果が得られた場合には、ステップ2(ST2)に進み、否定的な判定結果が得られた場合には、ステップ1(ST1)を繰り返す。
【0061】
次いで、ステップ2(ST2)において、自走開始地点記録部24により、自走開始地点をナビゲーション装置1の記憶手段に記録する。
【0062】
次いで、ステップ3(ST3)において、自走終了検知部25により、パーキングブレーキ信号の入力の有無に基づいて、自車のギアがパーキングに入れられたか否かを判定する。そして、ステップ3(ST3)において肯定的な判定結果が得られた場合には、自走の終了を検知してステップ4(ST4)に進み、否定的な判定結果が得られた場合には、自走の未了を検知してステップ3(ST3)を繰り返す。
【0063】
次いで、ステップ4(ST4)において、自走終了地点記録部26により、自走終了地点をナビゲーション装置1の記憶手段に記録する。
【0064】
次いで、ステップ5(ST5)において、経路探索制御部27による制御の下で、経路探索部21により、ステップ2(ST2)において記録された自走開始地点およびステップ4(ST4)において記録された自走終了地点に基づいて、自走地点間最適経路の探索を行う。
【0065】
次いで、ステップ6(ST6)において、自走地点間最適経路提示部28により、ステップ2(ST2)において記録された自走開始地点およびステップ4(ST4)において記録された自走終了地点に基づいて、走行軌跡記録部23の記録結果から自走区間走行軌跡を取得する。このとき、初期状態以前の走行軌跡の記録結果(履歴)が記憶手段内に一切存在しないのであれば、初期状態からの走行軌跡の記録結果が、そのまま自走区間走行軌跡として取得される。
【0066】
次いで、ステップ7(ST7)において、自走地点間最適経路提示部28により、ステップ5(ST5)において探索された自走地点間最適経路が、ステップ6(ST6)において取得された自走区間走行軌跡と異なるか否かを判定する。そして、ステップ7(ST7)において肯定的な判定結果が得られた場合には、ステップ8(ST8)に進み、否定的な判定結果が得られた場合には、処理を終了する。このとき、処理を終了する場合には、自走区間走行軌跡が最適経路ということになるので、今来た道が最適であることをユーザに通知してもよい。
【0067】
次いで、ステップ8(ST8)において、自走地点間最適経路提示部28により、自走地点間最適経路をユーザに提示して処理を終了する。その後は、ナビゲーション装置1の電源9をユーザ操作(Accオフ操作等)を待って切断すればよい。
【0068】
(変形例)
なお、変形例として、自走地点間最適経路提示部28は、経路探索部21によって探索された自走地点間最適経路の提示を、当該自走地点間最適経路が自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行うようにしてもよい。例えば、時間優先の自走地点間最適経路の場合には、自走区間走行軌跡に対して所要時間が3分以上短縮される場合に提示するようにしてもよく、また、距離優先の自走地点間最適経路の場合には、自走区間走行軌跡に対して距離が1km以上短縮される場合に提示するようにしてもよい。
【0069】
このような構成によれば、自走地点間最適経路の提示条件を経路コストの観点から厳しくすることによって、提示された自走地点間最適経路の利用価値を高めることができる。
【0070】
本変形例の処理工程は、図5に示すように、図4に示したフローチャートに対して、ステップ7(ST7)とステップ8(ST8)との間に、自走地点間最適経路の経路コストが自走区間走行軌跡の経路コストよりも所定値以上小さいか否かを判定するステップ7−2(ST7−2)が加わっている。ステップ7−2(ST7−2)において肯定的な判定結果が得られた場合には、ステップ8(ST8)に進んで自走地点間最適経路を提示し、否定的な判定結果が得られた場合には、処理を終了する。
【0071】
(第2実施形態)
次に、本発明に係るナビゲーション装置の第2実施形態について、第1実施形態との差異を中心として、図6乃至図8を参照して説明する。
【0072】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0073】
図6に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、第1実施形態の構成に加えて、更に、探索指示ボタン表示手段としての探索指示ボタン描画部31を有している。この探索指示ボタン描画部31は、自走終了地点記録部26による自走終了地点の記録を契機として、直ちに、図7に示すように、自走地点間最適経路の探索を指示するための探索指示ボタン33をディスプレイ6に表示するようになっている。この探索指示ボタン33は、操作部5によって操作可能とされている。このような探索指示ボタン33の表示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0074】
そして、本実施形態において、経路探索制御部27は、探索指示ボタン描画部31によって表示された探索指示ボタン33の操作を契機として、直ちに、経路探索部21に自走地点間最適経路を探索させるようになっている。なお、本実施形態においても、第1実施形態と同様に、自走地点間最適経路の探索および提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0075】
このような構成によれば、簡便な操作によるユーザの意思確認を待って自走地点間最適経路を探索するため、ユーザの意向を反映した自走地点間最適経路の提示を迅速に行うことができる。
【0076】
本実施形態の処理工程は、図8に示すように、図4に示したフローチャートに対して、ステップ4(ST4)とステップ5(ST5)との間に、自走地点間最適経路を探索するためのユーザの意思確認を行うステップ4−2(ST4−2)およびステップ4−3(ST4−3)の各工程が追加されている。
【0077】
すなわち、ステップ4−2(ST4−2)においては、探索指示ボタン描画部31により、探索指示ボタンの表示を行ってステップ4−3(ST4−3)に進む。
【0078】
次いで、ステップ4−3(ST4−3)において、経路探索制御部27により、ステップ4−2(ST4−2)において表示された探索指示ボタンが操作されたか否かを判定する。そして、ステップ4−3(ST4−3)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ4−3(ST4−3)を繰り返す。
【0079】
なお、本実施形態に、第1実施形態の変形例を組み合わせてもよい。
【0080】
(第3実施形態)
次に、本発明に係るナビゲーション装置の第3実施形態について、第1実施形態との差異を中心として、図9乃至図11を参照して説明する。
【0081】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0082】
図9に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、第1実施形態の構成に加えて、更に、出発地設定手段としての出発地設定部35を有している。この出発地設定部35は、自走地点間最適経路提示部28による自走地点間最適経路の提示を契機として、直ちに、走行終了地点に向かうと仮定した場合の出発地の設定操作を許容するようになっている。具体的には、出発地設定部35は、出発地の設定操作が可能な操作画面をディスプレイ6に表示するようになっている。この場合に、操作画面は、自走地点間最適経路が提示されている地図画面(図3参照)上の所望の地点を出発地としてタッチまたはカーソル指定する操作を許容する画面であってもよい。このとき、出発地の設定が可能である旨をユーザにメッセージ表示や音声案内によって通知することが望ましい。そして、このような操作画面に対して操作部5を用いた出発地の設定操作が行われた場合には、出発地設定部35は、設定操作に応じた地点を出発地として設定するようになっている。このような出発地の設定は、ナビゲーション装置1の電源9の切断前に行われるようになっている。
【0083】
そして、本実施形態において、経路探索制御部27は、出発地設定部35による出発地の設定を契機として、直ちに、経路探索部21に出発地設定時最適経路を探索させるようになっている。ただし、出発地設定時最適経路とは、出発地設定部35によって設定された出発地から自走終了地点記録部26によって記録された自走終了地点までの予め設定された経路探索条件に応じた最適経路のことである(以下、同様)。この出発地設定時最適経路の探索は、ナビゲーション装置1の電源9の切断前に行われるようになっている。この出発地設定時最適経路の探索は、自走地点間最適経路の探索と同様に、リンクコストに基づいた経路コスト計算によって行えばよい。
【0084】
さらに、図9に示すように、本実施形態において、ナビCPU10は、その機能ブロックの1つとして、出発地設定時最適経路提示手段としての出発地設定時最適経路提示部36を有している。この出発地設定時最適経路提示部36は、経路探索部21による出発地設定時最適経路の探索を契機として、探索された出発地設定時最適経路を直ちにユーザに提示するようになっている。この出発地設定時最適経路の提示は、ナビゲーション装置1の電源9の切断前に行われるようになっている。出発地設定時最適経路の提示は、自走地点間最適経路の場合と同様に、図10に示すように、地図画面上への出発地設定時最適経路に該当する道路の強調表示画像Rt’、Rd’の表示によって行うようにしてもよい。
【0085】
このような構成によれば、自走地点間最適経路に加えて、出発地設定時最適経路を提示することができるので、利便性を向上させることができる。
【0086】
本実施形態の処理工程は、図11に示すように、図4に示したフローチャートに対して、ステップ8(ST8)の後に、出発地設定時最適経路を提示するためのステップ9(ST9)〜ステップ11(ST11)の一連の工程が加わっている。
【0087】
すなわち、ステップ9(ST9)においては、経路探索制御部27により、出発地設定部35による出発地の設定が行われたか否かを判定する。そして、ステップ9(ST9)において肯定的な判定結果が得られた場合には、ステップ10(ST10)に進み、否定的な判定結果が得られた場合には、ステップ9(ST9)を繰り返す。
【0088】
次いで、ステップ10(ST10)において、経路探索制御部27の制御の下で、経路探索部21による出発地設定時最適経路の探索を行う。
【0089】
次いで、ステップ11(ST11)において、出発地設定時最適経路提示部36により、ステップ10(ST10)において探索された出発地設定時最適経路をユーザに提示して処理を終了する。
【0090】
なお、本実施形態に、第1実施形態の変形例および第2実施形態の少なくとも一方を組み合わせてもよい。
【0091】
また、本発明は、前述した実施の形態に限定されるものではなく、本発明の特徴を損なわない限度において種々変更してもよい。
【0092】
例えば、提示した自走地点間最適経路を電源9の切断後においても記憶手段に保存しておき、電源9の再投入後にユーザ操作にともなっていつでも閲覧できるように構成してもよい。
【0093】
また、自走終了検知部25は、パーキング信号を取得すること以外の方法によって、電源9切断前における自走の終了を検知してもよい。例えば、自車の車速が、信号待ち等の航続中における一時停止とはみなされない状況においてゼロになったことに基づいて自走の終了を検知してもよい。このようなケースとしては、例えば、自車位置がマッチングされるべきリンクが存在しないことや駐車場の代表座標点と自車位置との距離が閾値以下である等の自車が駐車場内に進入したとみなすことができる状態において、車速がゼロになったことを挙げることができる。この場合には、自車が最後にマッチングされていたリンクを自走終了地点とみなしてもよい。
【符号の説明】
【0094】
1 ナビゲーション装置
11 ハードディスクドライブ
18 自車位置算出部
21 経路探索部
22 経路誘導部
23 走行軌跡記録部
24 自走開始地点記録部
25 自走終了検知部
26 自走終了地点記録部
27 経路探索制御部
28 自走地点間最適経路提示部
【特許請求の範囲】
【請求項1】
地図情報が記憶された地図情報記憶手段と、
自車位置を算出する自車位置算出手段と、
前記地図情報記憶手段に記憶された前記地図情報に基づいて、前記自車位置算出手段によって算出された前記自車位置から目的地までの最適経路を探索する経路探索手段と、
この経路探索手段によって探索された前記最適経路にしたがった経路誘導を行う経路誘導手段と
を備えたナビゲーション装置であって、
前記算出された自車位置の変化に基づいて、自車の走行軌跡を記憶手段に記録する走行軌跡記録手段と、
前記自車が前記経路誘導をともなわない自走を開始したことを契機として、当該自走を開始した際の前記算出された自車位置に該当する自走開始地点を記憶手段に記録する自走開始地点記録手段と、
前記自車が前記自走を終了したことを検知する自走終了検知手段と、
この自走終了検知手段による前記自走の終了の検知を契機として、当該自走を終了した際の前記算出された自車位置に該当する自走終了地点を記憶手段に記録する自走終了地点記録手段と、
この自走終了地点記録手段による前記自走終了地点の記録後であって、ナビゲーション装置本体の電源の切断前に、前記経路探索手段に、前記自走開始地点記録手段によって記録された前記自走開始地点から前記自走終了地点記録手段によって記録された前記自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段と、
この経路探索制御手段によって前記経路探索手段に探索させた前記自走地点間最適経路が、前記走行軌跡記録手段によって記録された前記走行軌跡における前記記録された自走開始地点から前記記録された自走終了地点までの区間の軌跡である自走区間走行軌跡と異なる場合に、当該探索させた自走地点間最適経路を、前記ナビゲーション装置本体の電源の切断前にユーザに提示する自走地点間最適経路提示手段と
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記自走終了検知手段は、前記自車のギアがパーキングに入れられたことを検出することによって、前記自走の終了を検知すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記自走終了地点記録手段による前記自走終了地点の記録を契機として、前記自走地点間最適経路の探索を指示するための探索指示ボタンを表示部に表示する探索指示ボタン表示手段を備え、
前記経路探索制御手段は、前記探索指示ボタン表示手段によって表示された前記探索指示ボタンの操作を契機として、前記経路探索手段に前記自走地点間最適経路を探索させること
を特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記自走地点間最適経路提示手段は、前記探索させた自走地点間最適経路の提示を、当該自走地点間最適経路が前記自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行うこと
を特徴とする請求項1乃至請求項3のいずれか1項に記載のナビゲーション装置。
【請求項5】
前記経路探索制御手段は、前記経路探索手段に、複数の経路探索条件ごとの前記自走地点間最適経路を探索させること
を特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーション装置。
【請求項6】
前記自走地点間最適経路提示手段による前記自走地点間最適経路の提示後であって、前記ナビゲーション装置本体の電源の切断前に、前記記録された自走終了地点に向かうと仮定した場合の出発地を、ユーザ操作に応じて設定する出発地設定手段を備え、
前記経路探索制御手段は、前記出発地設定手段による前記出発地の設定を契機として、前記経路探索手段に、当該設定された出発地から前記記録された自走終了地点までの最適経路である出発地設定時最適経路を、前記ナビゲーション装置本体の電源の切断前に探索させ、
前記ナビゲーション装置本体は、当該探索させた出発地設定時最適経路を、前記ナビゲーション装置の電源の切断前にユーザに提示する出発地設定時最適経路提示手段を備えたこと
を特徴とする請求項1乃至請求項5のいずれか1項に記載のナビゲーション装置。
【請求項1】
地図情報が記憶された地図情報記憶手段と、
自車位置を算出する自車位置算出手段と、
前記地図情報記憶手段に記憶された前記地図情報に基づいて、前記自車位置算出手段によって算出された前記自車位置から目的地までの最適経路を探索する経路探索手段と、
この経路探索手段によって探索された前記最適経路にしたがった経路誘導を行う経路誘導手段と
を備えたナビゲーション装置であって、
前記算出された自車位置の変化に基づいて、自車の走行軌跡を記憶手段に記録する走行軌跡記録手段と、
前記自車が前記経路誘導をともなわない自走を開始したことを契機として、当該自走を開始した際の前記算出された自車位置に該当する自走開始地点を記憶手段に記録する自走開始地点記録手段と、
前記自車が前記自走を終了したことを検知する自走終了検知手段と、
この自走終了検知手段による前記自走の終了の検知を契機として、当該自走を終了した際の前記算出された自車位置に該当する自走終了地点を記憶手段に記録する自走終了地点記録手段と、
この自走終了地点記録手段による前記自走終了地点の記録後であって、ナビゲーション装置本体の電源の切断前に、前記経路探索手段に、前記自走開始地点記録手段によって記録された前記自走開始地点から前記自走終了地点記録手段によって記録された前記自走終了地点までの最適経路である自走地点間最適経路を探索させる経路探索制御手段と、
この経路探索制御手段によって前記経路探索手段に探索させた前記自走地点間最適経路が、前記走行軌跡記録手段によって記録された前記走行軌跡における前記記録された自走開始地点から前記記録された自走終了地点までの区間の軌跡である自走区間走行軌跡と異なる場合に、当該探索させた自走地点間最適経路を、前記ナビゲーション装置本体の電源の切断前にユーザに提示する自走地点間最適経路提示手段と
を備えたことを特徴とするナビゲーション装置。
【請求項2】
前記自走終了検知手段は、前記自車のギアがパーキングに入れられたことを検出することによって、前記自走の終了を検知すること
を特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
前記自走終了地点記録手段による前記自走終了地点の記録を契機として、前記自走地点間最適経路の探索を指示するための探索指示ボタンを表示部に表示する探索指示ボタン表示手段を備え、
前記経路探索制御手段は、前記探索指示ボタン表示手段によって表示された前記探索指示ボタンの操作を契機として、前記経路探索手段に前記自走地点間最適経路を探索させること
を特徴とする請求項1または請求項2に記載のナビゲーション装置。
【請求項4】
前記自走地点間最適経路提示手段は、前記探索させた自走地点間最適経路の提示を、当該自走地点間最適経路が前記自走区間走行軌跡に対して経路探索条件に応じた経路コストにおいて所定値以上小さい場合に行うこと
を特徴とする請求項1乃至請求項3のいずれか1項に記載のナビゲーション装置。
【請求項5】
前記経路探索制御手段は、前記経路探索手段に、複数の経路探索条件ごとの前記自走地点間最適経路を探索させること
を特徴とする請求項1乃至請求項4のいずれか1項に記載のナビゲーション装置。
【請求項6】
前記自走地点間最適経路提示手段による前記自走地点間最適経路の提示後であって、前記ナビゲーション装置本体の電源の切断前に、前記記録された自走終了地点に向かうと仮定した場合の出発地を、ユーザ操作に応じて設定する出発地設定手段を備え、
前記経路探索制御手段は、前記出発地設定手段による前記出発地の設定を契機として、前記経路探索手段に、当該設定された出発地から前記記録された自走終了地点までの最適経路である出発地設定時最適経路を、前記ナビゲーション装置本体の電源の切断前に探索させ、
前記ナビゲーション装置本体は、当該探索させた出発地設定時最適経路を、前記ナビゲーション装置の電源の切断前にユーザに提示する出発地設定時最適経路提示手段を備えたこと
を特徴とする請求項1乃至請求項5のいずれか1項に記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−44546(P2013−44546A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180368(P2011−180368)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]