
ナビゲーション装置
【課題】移動方向に位置する地点が目的地として自動的に推定されるナビゲーション装置を実現する。
【解決手段】ナビゲーション装置は、移動体が複数の特定の地点のそれぞれへ移動した際に複数の特定の地点の第1位置情報を収集する第1情報収集手段と、移動体の移動方向を検出する検出手段と、移動体の現在地の第2位置情報を収集する第2情報収集手段と、第1情報と移動方向と第2位置情報とに基づき、移動体の目的地を推定する推定手段と、現在地から推定手段によって推定された目的地までの経路を探索し、移動体が経路を移動して目的地へ到着する際の到着予定時刻を算出する算出手段とを有する。
【解決手段】ナビゲーション装置は、移動体が複数の特定の地点のそれぞれへ移動した際に複数の特定の地点の第1位置情報を収集する第1情報収集手段と、移動体の移動方向を検出する検出手段と、移動体の現在地の第2位置情報を収集する第2情報収集手段と、第1情報と移動方向と第2位置情報とに基づき、移動体の目的地を推定する推定手段と、現在地から推定手段によって推定された目的地までの経路を探索し、移動体が経路を移動して目的地へ到着する際の到着予定時刻を算出する算出手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
通常、ナビゲーション装置に対して目的地を入力すると現在地から目的地までの経路探索が行われ、得られた経路と、その経路を移動した場合の目的地までの所要時間とが画面に表示される。目的地到着予定時刻は、経路誘導が開始されると、算出されて画面に表示される。しかし、何回か繰り返して同じ目的地へ向かって移動するような場合は、その都度、同じ目的地を入力して経路誘導を開始させる操作がユーザにとって煩わしい。そのため、ナビゲーション装置を搭載した車両のイグニッションスイッチがオンになると、自動的に目的地を推定して、現在地からその目的地までの経路探索を探索し、探索した経路に基づいて経路誘導を行うナビゲーション装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−292029号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のナビゲーション装置によると、移動方向と異なる方向の目的地を抽出する可能性がある。
【課題を解決するための手段】
【0005】
請求項1に記載のナビゲーション装置は、移動体が複数の特定の地点のそれぞれへ移動した際に複数の特定の地点の第1位置情報を収集する第1情報収集手段と、移動体の移動方向を検出する検出手段と、移動体の現在地の第2位置情報を収集する第2情報収集手段と、第1情報と移動方向と第2位置情報とに基づき、移動体の目的地を推定する推定手段と、現在地から推定手段によって推定された目的地までの経路を探索し、移動体が経路を移動して目的地へ到着する際の到着予定時刻を算出する算出手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、移動方向に位置する地点が目的地として推定される。
【図面の簡単な説明】
【0007】
【図1】一実施の形態のナビゲーション装置の構成を例示する図である。
【図2】ナビゲーション装置の移動履歴情報収集処理手順を示すフローチャートである。
【図3】移動履歴情報を例示する図である。
【図4】ナビゲーション装置の目的地推定処理手順を示すフローチャートである。
【図5】目的地として推定される対象となる地点を例示する図である。
【発明を実施するための形態】
【0008】
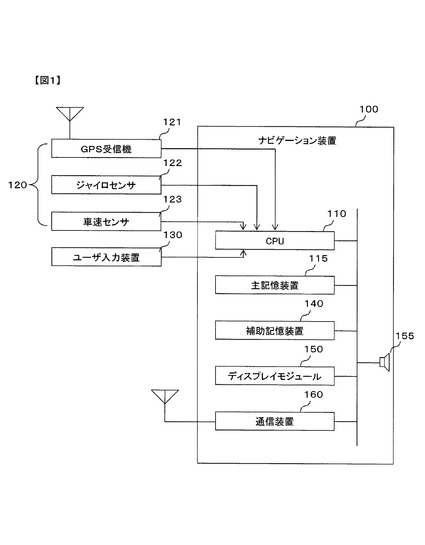
図1〜図5を参照して、本発明による一実施の形態のナビゲーション装置を説明する。図1は、本実施の形態のナビゲーション装置100の構成を例示する図である。CPU110はナビゲーション装置100全体を制御する演算処理装置であり、CPU110およびその周辺装置は互いにバスで接続されている。周辺装置は、主記憶装置115、補助記憶装置140、ディスプレイモジュール150、スピーカ155および通信装置160を含む。主記憶装置115は、CPU110の作業エリアであるワークメモリや制御プログラムが格納されているプログラムメモリを有する。
【0009】
CPU110においては、現在地検出装置120およびユーザ入力装置130からの信号が入力される。現在地検出装置120は、たとえば、GPS受信機121、ジャイロセンサ122、および車速センサ123であり、現在地検出装置120からの入力信号により現在位置、現在時刻、移動方向および移動速度を特定することができる。ユーザ入力装置130は、たとえば、タッチパネル、パネル周辺の押ボタン式スイッチ、リモコン、およびジョイスティックである。
【0010】
補助記憶装置140は、ナビゲーション処理に使用する道路地図データやPOI(Point Of Interest:観光地や各種施設)情報を格納する記憶装置である。各POIは、POI識別子で識別される。補助記憶装置140は、たとえば、ハードディスクドライブのほか、道路地図データが格納されたCDやDVD、フラッシュメモリ、その他の記録媒体、およびその読み出し装置である。補助記憶装置140は、通信装置160を介して受信された交通情報等の各種情報や、年月日と曜日とを対応付けるカレンダーデータ、後述する移動履歴情報等をも記憶する。
【0011】
道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データを含む。地図表示用データは道路や道路地図の背景を表示するためのデータである。経路探索用データは、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点名称・道路名称・方面名称・方向ガイド施設情報を含むデータであり、演算された推奨経路に基づきユーザを経路誘導する際に用いられる。
【0012】
道路地図データに含まれる道路データにおいては、一本の道路は、交差点などをノード番号に対応付けられたノードとして定義し、ノード間をリンク番号に対応付けられたリンクとして定義することによって、リンク列データとして表される。したがって、リンク列データは、ノードデータおよびリンクデータから構成される。道路データは、ノードデータとリンクデータとが、メッシュコードとともにメッシュ領域単位で分類して格納されている。メッシュ領域とは、道路地図を所定範囲毎に区分けしたときの区分けされた各領域をいう。メッシュコードの記憶領域には、メッシュ領域を識別する番号が格納される。リンク列データの記憶領域には、ノードの位置座標とノード間のリンク番号と、リンクをさらに短く分割する補間点の位置座標とが各々の領域に格納される。これらの位置座標が地図表示やロケータ処理の形状データとして用いられる。
【0013】
ディスプレイモジュール150は、CPU110から出力される文字や図形を含む画像データに基づいてパネル155に画面表示し、スピーカ155は、CPU110から出力される音声データに基づいて音声を出力する。
【0014】
通信装置160は、道路交通情報を受信することができる。道路交通情報は、プログラム処理が可能なデジタルデータとして送信され、渋滞情報、規制情報、駐車場情報、サービスエリア情報、パーキングエリア情報を含んでいる。規制情報には、車線規制情報、高速道路のランプ規制情報、インターチェンジ規制情報が含まれる。
【0015】
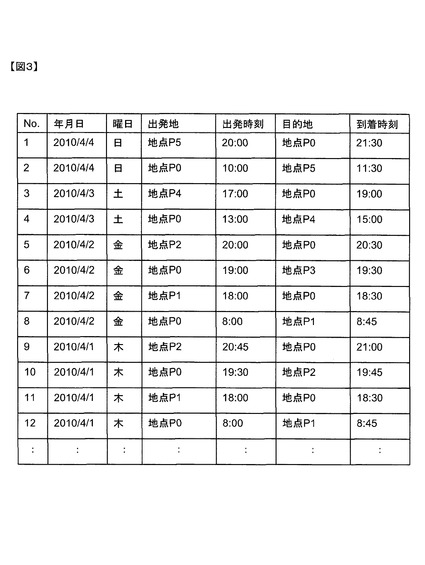
図2は、ナビゲーション装置100の移動履歴情報収集処理手順を示すフローチャートである。本処理手順は、CPU110によって実行される。ステップS210において、CPU110は出発地情報収集指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体の出発地において、その車両のイグニッションまたは電源がオンされたとき、出発地情報収集指示が有ったと判定され、処理はステップS215へ移る。その出発地において、その車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから出発地情報収集指示が入力されたとき、出発地情報収集指示が有ったと判定されることとしてもよい。出発地情報収集指示が無いと判定されたときは、出発地情報収集指示が有るまで待機する。
【0016】
ステップS215においては、CPU110は、ナビゲーション装置100を搭載した車両の出発地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、出発地の緯度および経度に基づく位置情報が収集される。その出発地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、出発地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を出発地の位置情報として収集してもよい。出発地がPOIに対応する場合は、POI識別子を出発地の位置情報として収集してもよい。
【0017】
ステップS220においては、CPU110は、ナビゲーション装置100を搭載した車両が移動を開始したか否かを判定する。例えば、その車両が出発する際に現在地検出装置120に含まれる車速センサ123が受信した車速パルス信号に基づいて判定する。移動を開始したと判定されれば、処理はステップS225へ移る。移動を開始していないと判定されれば、移動の開始を待機する。
【0018】
ステップS225においては、CPU110は、ナビゲーション装置100を搭載した車両が出発地を出発したときの出発時刻情報を収集する。例えば、その車両が出発地を出発する際に現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、出発時刻情報として収集する。
【0019】
ステップS230においては、CPU110は、目的地情報収集指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体の目的地において、その車両のイグニッションまたは電源がオフされたとき、目的地情報収集指示が有ったと判定され、処理はステップS235へ移る。その車両が目的地に到着した後に、その目的地において、ユーザ入力装置130を介してユーザから目的地情報収集指示が入力されたとき、目的地情報収集指示が有ったと判定されることとしてもよい。目的地情報収集指示が無いと判定されたときは、目的地情報収集指示が有るまで待機する。
【0020】
ステップS235においては、CPU110は、ナビゲーション装置100を搭載した車両の目的地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、目的地の緯度および経度に基づく位置情報が収集される。その目的地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、目的地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を目的地の位置情報として収集してもよい。目的地がPOIに対応する場合は、POI識別子を目的地の位置情報として収集してもよい。
【0021】
ステップS240においては、CPU110は、ナビゲーション装置100を搭載した車両が目的地へ到着したときの到着時刻情報を収集する。例えば、その車両が目的地へ到着した際に現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、到着時刻情報として収集する。
【0022】
ステップS245において、CPU110は、ステップS215で収集した出発地の位置情報、ステップS225で収集した出発時刻情報、ステップS235で収集した目的地の位置情報、およびステップS240で収集した到着時刻情報を、移動履歴情報として補助記憶装置140に記憶させ、本処理手順は終了する。なお、本処理手順に関して、最終目的地に加えて途中の経由地等も含む様々な特定の地点をいずれも目的地とみなして、同様の処理手順を行うこととしてもよい。
【0023】
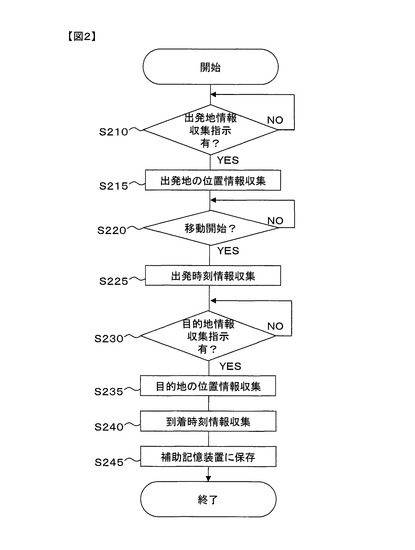
図3は、移動履歴情報を例示する図である。図3に示す移動履歴情報には、過去の複数の移動回数分の移動履歴として、履歴No.、年月日、曜日、出発地、出発時刻、目的地、および到着時刻が含まれている。年月日、曜日、出発時刻、および到着時刻は、図2のステップS225で収集した出発時刻情報およびステップS240で収集した到着時刻情報、ならびに補助記憶装置140に記憶されたカレンダーデータに基づいて特定される。出発地および目的地に対応する地点P1〜P5は、図2のステップS215で収集した出発地の位置情報およびステップS235で収集した目的地の位置情報に基づいて特定される。したがって、出発地および目的地に対応する地点P1〜P5には、地点P1〜P5の緯度および経度、地点P1〜P5の位置に対応するメッシュコード、リンク番号、およびノード番号、ならびに地点P1〜P5に対応するPOI識別子のうちの少なくとも1つが対応付けられる。
【0024】
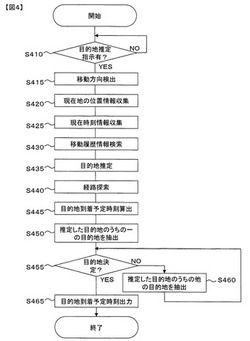
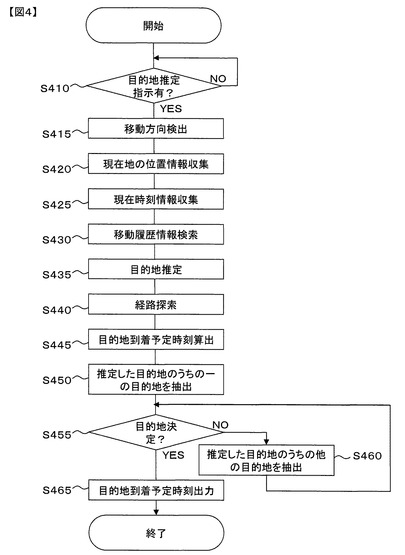
図4は、ナビゲーション装置の目的地推定処理手順を示すフローチャートである。本処理手順は、CPU110によって実行される。ステップS410において、CPU110は目的地推定指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体のイグニッションまたは電源がオンされたとき、目的地推定指示が有ったと判定され、処理はステップS415へ移る。その車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから目的地推定指示が入力されたとき、目的地推定指示が有ったと判定されることとしてもよい。目的地推定指示が無いと判定されたときは、目的地推定指示が有るまで待機する。
【0025】
ステップS415においては、CPU110は、ナビゲーション装置100を搭載した車両の移動方向を検出する。例えば、現在地検出装置120に含まれるジャイロセンサ122が受信した方位信号に基づいて、その車両の移動方向が検出される。
【0026】
ステップS420においては、CPU110は、ナビゲーション装置100を搭載した車両の現在地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、現在地の緯度および経度に基づく位置情報が収集される。その現在地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、現在地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を現在地の位置情報として収集してもよい。現在地がPOIに対応する場合は、POI識別子を現在地の位置情報として収集してもよい。
【0027】
ステップS425においては、CPU110は現在時刻情報を収集する。例えば、現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、現在時刻情報として収集する。
【0028】
ステップS430においては、CPU110は移動履歴情報を検索する。例えば、図3に示す移動履歴情報を検索して、目的地の地点P0〜P5を収集する。ステップS435においては、CPU110は、移動履歴情報の検索結果に基づいて目的地推定を行う。ステップS430において地点P0〜P5が収集されている場合、その中から、所定の条件に基づいて例えば地点P1、P2およびP4が目的地であると推定する。その所定の条件についての説明は、図5を用いて後述する。
【0029】
ステップS440においては、CPU110は、ナビゲーション装置100を搭載した車両の現在地から、ステップS435で抽出された地点までの経路探索を行う。例えば、現在地から地点P1、P2およびP4までの経路をそれぞれ探索する。
【0030】
ステップS445においては、CPU110は、ナビゲーション装置100を搭載した車両が、目的地として抽出された地点に到着する到着予定時刻を算出する。例えば、目的地として推定された地点が地点P1、P2およびP4である場合、ステップS440で探索された経路とステップS425で収集された現在時刻とに基づいて、その車両が目的地として推定された地点が地点P1、P2およびP4に到着する到着予定時刻が算出される。
【0031】
ステップS450においては、CPU110は、ナビゲーション装置100を搭載した車両の目的地を、ステップS435で目的地として推定された地点のうちのいずれか1つの地点を抽出する。例えば、地点P4が抽出される。
【0032】
ステップS455においては、CPU110は、ステップS450で抽出された地点が目的地であるとして決定してよいか否かを判定する。例えば、地点P4が目的地であるか否かを問合せる問合せ画面をディスプレイモジュール150の表示画面上に表示し、ユーザ入力装置130を介してユーザから肯定的回答または否定的回答が入力されることにより、地点P4が目的地であるとして決定してよいか否かが判定される。
【0033】
ステップS455で抽出された地点が目的地であるとして決定してよいと判定されたとき、処理はステップS465へ移り、ステップS455で抽出された地点が目的地であるとして決定してはならないと判定されたとき、処理はステップS460へ移る。
【0034】
ステップS460においては、CPU110は、ステップS430で目的地であると推定された地点のうち、ステップS450で抽出された地点以外の地点が新たに抽出され、その新たに抽出された地点について、ステップS455における目的地決定判定処理が再び行われる。例えば、地点P1、P2およびP4のうち、既に抽出された地点P4と異なる地点P1が、ステップS460で新たに抽出され、その地点P1について、ステップS455における目的地決定判定処理が再び行われる。
【0035】
ステップS465においては、CPU110は、ステップS445で算出された目的地への到着予定時刻のうち、ステップS455で目的地として決定された地点への到着予定時刻をディスプレイモジュール150の表示画面上に表示し、本処理手順は終了する。到着予定時刻をディスプレイモジュール150の表示画面上に表示する代わりに、または表示するとともに、到着予定時刻をスピーカ155に音声として出力させてもよい。
【0036】
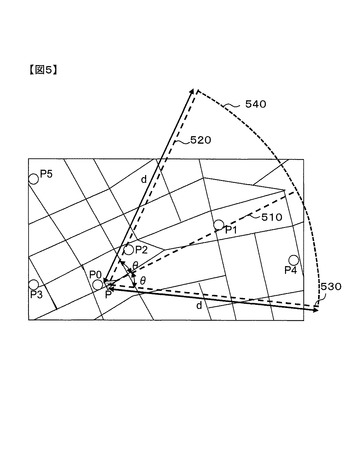
図5は、図4のステップS430において目的地として推定される対象となる地点を例示する図である。図5には、補助記憶装置140に記憶された道路地図データに基づく道路地図の一部が描かれているとともに、その道路地図に対応して図3に示す移動履歴情報に含まれる地点P0〜P5が表されている。図4のステップS430の説明で述べたように、目的地として推定される対象となる地点には、地点P0〜P5の全てが該当するのではなく、所定の条件に基づいて例えば地点P1、P2およびP4が該当することとなる。所定の条件は、例えば、ナビゲーション装置100を搭載した車両の現在地を表す地点Pから、その車両の移動方向を表す破線510に対して、両側に所定値θずつの角度をなす破線520および530の間に挟まれた破線510を含む範囲に位置することであるものとする。したがって、その所定の条件の下では、破線520および530の間に挟まれた破線510を含む範囲に位置する地点P1、P2およびP4が目的地として推定されるが、その範囲に属さない地点P0、P3およびP5は目的地として推定されない。なお、所定の条件は、例えば、破線520および530の間に挟まれた破線510を含む範囲に位置することであるとともに、地点Pから所定の距離d以内に位置すること、すなわち円弧540よりも地点P側の範囲であることとしてもよい。
【0037】
以上にて説明した実施の形態のナビゲーション装置100は、ナビゲーション装置100を搭載した車両が複数の特定の地点P0〜P5のそれぞれへ移動した際に複数の特定の地点P0〜P5の位置情報を、現在地検出装置120を用いて収集し、その車両の移動方向を、現在地検出装置120を用いて検出するCPU110を有する。CPU110は、さらに、その車両の現在地の位置情報を、現在地検出装置120を用いて収集し、複数の特定の地点P0〜P5の位置情報とその車両の移動方向と現在地の位置情報とに基づき、その車両の目的地を推定し、現在地から推定された目的地までの経路を探索し、その車両がその経路を移動して目的地へ到着する際の到着予定時刻を算出する。したがって、複数の特定の地点P0〜P5の全てではなく、移動方向に位置する地点P1、P2およびP4が目的地として推定されるという作用効果を奏する。
【0038】
−−−変形例−−−
以上で説明した実施の形態のナビゲーション装置100を、次のように変形することもできる。
(1)上述した一実施の形態において、CPU110に、図2のステップS235およびS245のみを実行させるとともに、図4のステップS415、S420、S430、S435、S440およびS445のみを実行させることによっても、上述した一実施の形態のナビゲーション装置100と同様の作用効果を奏することができる。
【0039】
(2)上述した一実施の形態における図4のステップS455およびS460では、ステップS435で目的地として推定された地点のうちのいずれの地点を目的地として決定するかについて、ユーザからの入力に基づいて決定することとした。しかし、ステップS445で算出された地点P1、P2およびP4に到着する到着予定時刻と、図3の移動履歴情報に含まれる地点P1、P2およびP4への到着時刻とを、地点P1、P2およびP4のそれぞれについて比較して、ステップS445で算出された到着予定時刻に最も近い到着時刻に対応する、移動履歴情報に含まれる地点を目的地であるとして決定してもよい。
【0040】
(3)上述した一実施の形態における図4のステップS410では、ナビゲーション装置100を搭載した車両のイグニッションもしくは電源がオンされたとき、またはその車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから目的地推定指示が入力されたとき、目的地推定指示が有ったと判定されることとした。しかし、補助記憶装置140の道路地図データが交通信号機を有する交差点の位置情報を含む場合、図4のステップS420で収集される現在地の位置情報に基づき、ナビゲーション装置100を搭載した車両が交通信号機を有する交差点の近傍に位置し、かつ車速センサ123を介して計測されたその車両の移動速度が略零であるとき、すなわちその車両がその交差点近傍で信号待ちを行っていると推定されるとき、目的地推定指示が有ったと判定されることとして、推定される目的地への到着予定時刻がディスプレイモジュール150の表示画面上に表示されることとしてもよい。
【0041】
(4)上述した一実施の形態における図4のステップS435では、図5に示すような所定の条件に基づいて地点P1、P2およびP4が目的地であると推定した。しかし、図3に示す移動履歴情報の目的地のデータを参照して、ナビゲーション装置100を搭載した車両が到着した頻度が所定レベルよりも大きい地点を、目的地として推定することとしてもよい。
【0042】
(5)上述した一実施の形態および変形例の説明では、本発明をナビゲーション装置100に適用した実施の形態を説明したが、PND(Personal Navigation Device)、PDA(Personal Digital Assistant)、携帯電話機、ポータブルパソコン、あるいはポータブルゲーム機に本発明を適用してもよい。
【0043】
上述した各実施の形態および各変形例は、それぞれ組み合わせてもよい。また、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における機器構成に何ら限定されない。
【符号の説明】
【0044】
100 ナビゲーション装置 110 CPU
115 主記憶装置 120 現在地検出装置
121 GPS受信機 122 ジャイロセンサ
123 車速センサ 130 ユーザ入力装置
140 補助記憶装置 150 ディスプレイモジュール
155 スピーカ 160 通信装置
510、520、530 破線 540 円弧
【技術分野】
【0001】
本発明は、ナビゲーション装置に関する。
【背景技術】
【0002】
通常、ナビゲーション装置に対して目的地を入力すると現在地から目的地までの経路探索が行われ、得られた経路と、その経路を移動した場合の目的地までの所要時間とが画面に表示される。目的地到着予定時刻は、経路誘導が開始されると、算出されて画面に表示される。しかし、何回か繰り返して同じ目的地へ向かって移動するような場合は、その都度、同じ目的地を入力して経路誘導を開始させる操作がユーザにとって煩わしい。そのため、ナビゲーション装置を搭載した車両のイグニッションスイッチがオンになると、自動的に目的地を推定して、現在地からその目的地までの経路探索を探索し、探索した経路に基づいて経路誘導を行うナビゲーション装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−292029号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のナビゲーション装置によると、移動方向と異なる方向の目的地を抽出する可能性がある。
【課題を解決するための手段】
【0005】
請求項1に記載のナビゲーション装置は、移動体が複数の特定の地点のそれぞれへ移動した際に複数の特定の地点の第1位置情報を収集する第1情報収集手段と、移動体の移動方向を検出する検出手段と、移動体の現在地の第2位置情報を収集する第2情報収集手段と、第1情報と移動方向と第2位置情報とに基づき、移動体の目的地を推定する推定手段と、現在地から推定手段によって推定された目的地までの経路を探索し、移動体が経路を移動して目的地へ到着する際の到着予定時刻を算出する算出手段とを備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、移動方向に位置する地点が目的地として推定される。
【図面の簡単な説明】
【0007】
【図1】一実施の形態のナビゲーション装置の構成を例示する図である。
【図2】ナビゲーション装置の移動履歴情報収集処理手順を示すフローチャートである。
【図3】移動履歴情報を例示する図である。
【図4】ナビゲーション装置の目的地推定処理手順を示すフローチャートである。
【図5】目的地として推定される対象となる地点を例示する図である。
【発明を実施するための形態】
【0008】
図1〜図5を参照して、本発明による一実施の形態のナビゲーション装置を説明する。図1は、本実施の形態のナビゲーション装置100の構成を例示する図である。CPU110はナビゲーション装置100全体を制御する演算処理装置であり、CPU110およびその周辺装置は互いにバスで接続されている。周辺装置は、主記憶装置115、補助記憶装置140、ディスプレイモジュール150、スピーカ155および通信装置160を含む。主記憶装置115は、CPU110の作業エリアであるワークメモリや制御プログラムが格納されているプログラムメモリを有する。
【0009】
CPU110においては、現在地検出装置120およびユーザ入力装置130からの信号が入力される。現在地検出装置120は、たとえば、GPS受信機121、ジャイロセンサ122、および車速センサ123であり、現在地検出装置120からの入力信号により現在位置、現在時刻、移動方向および移動速度を特定することができる。ユーザ入力装置130は、たとえば、タッチパネル、パネル周辺の押ボタン式スイッチ、リモコン、およびジョイスティックである。
【0010】
補助記憶装置140は、ナビゲーション処理に使用する道路地図データやPOI(Point Of Interest:観光地や各種施設)情報を格納する記憶装置である。各POIは、POI識別子で識別される。補助記憶装置140は、たとえば、ハードディスクドライブのほか、道路地図データが格納されたCDやDVD、フラッシュメモリ、その他の記録媒体、およびその読み出し装置である。補助記憶装置140は、通信装置160を介して受信された交通情報等の各種情報や、年月日と曜日とを対応付けるカレンダーデータ、後述する移動履歴情報等をも記憶する。
【0011】
道路地図データは、地図に関する情報であり、地図表示用データ、経路探索用データ、誘導データを含む。地図表示用データは道路や道路地図の背景を表示するためのデータである。経路探索用データは、主に推奨経路を演算(経路探索)する際に用いられる。誘導データは、交差点名称・道路名称・方面名称・方向ガイド施設情報を含むデータであり、演算された推奨経路に基づきユーザを経路誘導する際に用いられる。
【0012】
道路地図データに含まれる道路データにおいては、一本の道路は、交差点などをノード番号に対応付けられたノードとして定義し、ノード間をリンク番号に対応付けられたリンクとして定義することによって、リンク列データとして表される。したがって、リンク列データは、ノードデータおよびリンクデータから構成される。道路データは、ノードデータとリンクデータとが、メッシュコードとともにメッシュ領域単位で分類して格納されている。メッシュ領域とは、道路地図を所定範囲毎に区分けしたときの区分けされた各領域をいう。メッシュコードの記憶領域には、メッシュ領域を識別する番号が格納される。リンク列データの記憶領域には、ノードの位置座標とノード間のリンク番号と、リンクをさらに短く分割する補間点の位置座標とが各々の領域に格納される。これらの位置座標が地図表示やロケータ処理の形状データとして用いられる。
【0013】
ディスプレイモジュール150は、CPU110から出力される文字や図形を含む画像データに基づいてパネル155に画面表示し、スピーカ155は、CPU110から出力される音声データに基づいて音声を出力する。
【0014】
通信装置160は、道路交通情報を受信することができる。道路交通情報は、プログラム処理が可能なデジタルデータとして送信され、渋滞情報、規制情報、駐車場情報、サービスエリア情報、パーキングエリア情報を含んでいる。規制情報には、車線規制情報、高速道路のランプ規制情報、インターチェンジ規制情報が含まれる。
【0015】
図2は、ナビゲーション装置100の移動履歴情報収集処理手順を示すフローチャートである。本処理手順は、CPU110によって実行される。ステップS210において、CPU110は出発地情報収集指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体の出発地において、その車両のイグニッションまたは電源がオンされたとき、出発地情報収集指示が有ったと判定され、処理はステップS215へ移る。その出発地において、その車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから出発地情報収集指示が入力されたとき、出発地情報収集指示が有ったと判定されることとしてもよい。出発地情報収集指示が無いと判定されたときは、出発地情報収集指示が有るまで待機する。
【0016】
ステップS215においては、CPU110は、ナビゲーション装置100を搭載した車両の出発地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、出発地の緯度および経度に基づく位置情報が収集される。その出発地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、出発地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を出発地の位置情報として収集してもよい。出発地がPOIに対応する場合は、POI識別子を出発地の位置情報として収集してもよい。
【0017】
ステップS220においては、CPU110は、ナビゲーション装置100を搭載した車両が移動を開始したか否かを判定する。例えば、その車両が出発する際に現在地検出装置120に含まれる車速センサ123が受信した車速パルス信号に基づいて判定する。移動を開始したと判定されれば、処理はステップS225へ移る。移動を開始していないと判定されれば、移動の開始を待機する。
【0018】
ステップS225においては、CPU110は、ナビゲーション装置100を搭載した車両が出発地を出発したときの出発時刻情報を収集する。例えば、その車両が出発地を出発する際に現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、出発時刻情報として収集する。
【0019】
ステップS230においては、CPU110は、目的地情報収集指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体の目的地において、その車両のイグニッションまたは電源がオフされたとき、目的地情報収集指示が有ったと判定され、処理はステップS235へ移る。その車両が目的地に到着した後に、その目的地において、ユーザ入力装置130を介してユーザから目的地情報収集指示が入力されたとき、目的地情報収集指示が有ったと判定されることとしてもよい。目的地情報収集指示が無いと判定されたときは、目的地情報収集指示が有るまで待機する。
【0020】
ステップS235においては、CPU110は、ナビゲーション装置100を搭載した車両の目的地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、目的地の緯度および経度に基づく位置情報が収集される。その目的地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、目的地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を目的地の位置情報として収集してもよい。目的地がPOIに対応する場合は、POI識別子を目的地の位置情報として収集してもよい。
【0021】
ステップS240においては、CPU110は、ナビゲーション装置100を搭載した車両が目的地へ到着したときの到着時刻情報を収集する。例えば、その車両が目的地へ到着した際に現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、到着時刻情報として収集する。
【0022】
ステップS245において、CPU110は、ステップS215で収集した出発地の位置情報、ステップS225で収集した出発時刻情報、ステップS235で収集した目的地の位置情報、およびステップS240で収集した到着時刻情報を、移動履歴情報として補助記憶装置140に記憶させ、本処理手順は終了する。なお、本処理手順に関して、最終目的地に加えて途中の経由地等も含む様々な特定の地点をいずれも目的地とみなして、同様の処理手順を行うこととしてもよい。
【0023】
図3は、移動履歴情報を例示する図である。図3に示す移動履歴情報には、過去の複数の移動回数分の移動履歴として、履歴No.、年月日、曜日、出発地、出発時刻、目的地、および到着時刻が含まれている。年月日、曜日、出発時刻、および到着時刻は、図2のステップS225で収集した出発時刻情報およびステップS240で収集した到着時刻情報、ならびに補助記憶装置140に記憶されたカレンダーデータに基づいて特定される。出発地および目的地に対応する地点P1〜P5は、図2のステップS215で収集した出発地の位置情報およびステップS235で収集した目的地の位置情報に基づいて特定される。したがって、出発地および目的地に対応する地点P1〜P5には、地点P1〜P5の緯度および経度、地点P1〜P5の位置に対応するメッシュコード、リンク番号、およびノード番号、ならびに地点P1〜P5に対応するPOI識別子のうちの少なくとも1つが対応付けられる。
【0024】
図4は、ナビゲーション装置の目的地推定処理手順を示すフローチャートである。本処理手順は、CPU110によって実行される。ステップS410において、CPU110は目的地推定指示が有ったか否かを判定する。例えば、ナビゲーション装置100を搭載した車両等の移動体のイグニッションまたは電源がオンされたとき、目的地推定指示が有ったと判定され、処理はステップS415へ移る。その車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから目的地推定指示が入力されたとき、目的地推定指示が有ったと判定されることとしてもよい。目的地推定指示が無いと判定されたときは、目的地推定指示が有るまで待機する。
【0025】
ステップS415においては、CPU110は、ナビゲーション装置100を搭載した車両の移動方向を検出する。例えば、現在地検出装置120に含まれるジャイロセンサ122が受信した方位信号に基づいて、その車両の移動方向が検出される。
【0026】
ステップS420においては、CPU110は、ナビゲーション装置100を搭載した車両の現在地の位置情報を収集する。例えば、現在地検出装置120からの入力信号に基づき、現在地の緯度および経度に基づく位置情報が収集される。その現在地の緯度および経度を補助記憶装置140に記憶されている道路地図データに対応付けることによって、現在地の位置に対応するメッシュコード、リンク番号、およびノード番号を特定し、特定したメッシュコード、リンク番号、およびノード番号を現在地の位置情報として収集してもよい。現在地がPOIに対応する場合は、POI識別子を現在地の位置情報として収集してもよい。
【0027】
ステップS425においては、CPU110は現在時刻情報を収集する。例えば、現在地検出装置120に含まれるGPS受信機121が受信したGPS信号に含まれる現在時刻を、現在時刻情報として収集する。
【0028】
ステップS430においては、CPU110は移動履歴情報を検索する。例えば、図3に示す移動履歴情報を検索して、目的地の地点P0〜P5を収集する。ステップS435においては、CPU110は、移動履歴情報の検索結果に基づいて目的地推定を行う。ステップS430において地点P0〜P5が収集されている場合、その中から、所定の条件に基づいて例えば地点P1、P2およびP4が目的地であると推定する。その所定の条件についての説明は、図5を用いて後述する。
【0029】
ステップS440においては、CPU110は、ナビゲーション装置100を搭載した車両の現在地から、ステップS435で抽出された地点までの経路探索を行う。例えば、現在地から地点P1、P2およびP4までの経路をそれぞれ探索する。
【0030】
ステップS445においては、CPU110は、ナビゲーション装置100を搭載した車両が、目的地として抽出された地点に到着する到着予定時刻を算出する。例えば、目的地として推定された地点が地点P1、P2およびP4である場合、ステップS440で探索された経路とステップS425で収集された現在時刻とに基づいて、その車両が目的地として推定された地点が地点P1、P2およびP4に到着する到着予定時刻が算出される。
【0031】
ステップS450においては、CPU110は、ナビゲーション装置100を搭載した車両の目的地を、ステップS435で目的地として推定された地点のうちのいずれか1つの地点を抽出する。例えば、地点P4が抽出される。
【0032】
ステップS455においては、CPU110は、ステップS450で抽出された地点が目的地であるとして決定してよいか否かを判定する。例えば、地点P4が目的地であるか否かを問合せる問合せ画面をディスプレイモジュール150の表示画面上に表示し、ユーザ入力装置130を介してユーザから肯定的回答または否定的回答が入力されることにより、地点P4が目的地であるとして決定してよいか否かが判定される。
【0033】
ステップS455で抽出された地点が目的地であるとして決定してよいと判定されたとき、処理はステップS465へ移り、ステップS455で抽出された地点が目的地であるとして決定してはならないと判定されたとき、処理はステップS460へ移る。
【0034】
ステップS460においては、CPU110は、ステップS430で目的地であると推定された地点のうち、ステップS450で抽出された地点以外の地点が新たに抽出され、その新たに抽出された地点について、ステップS455における目的地決定判定処理が再び行われる。例えば、地点P1、P2およびP4のうち、既に抽出された地点P4と異なる地点P1が、ステップS460で新たに抽出され、その地点P1について、ステップS455における目的地決定判定処理が再び行われる。
【0035】
ステップS465においては、CPU110は、ステップS445で算出された目的地への到着予定時刻のうち、ステップS455で目的地として決定された地点への到着予定時刻をディスプレイモジュール150の表示画面上に表示し、本処理手順は終了する。到着予定時刻をディスプレイモジュール150の表示画面上に表示する代わりに、または表示するとともに、到着予定時刻をスピーカ155に音声として出力させてもよい。
【0036】
図5は、図4のステップS430において目的地として推定される対象となる地点を例示する図である。図5には、補助記憶装置140に記憶された道路地図データに基づく道路地図の一部が描かれているとともに、その道路地図に対応して図3に示す移動履歴情報に含まれる地点P0〜P5が表されている。図4のステップS430の説明で述べたように、目的地として推定される対象となる地点には、地点P0〜P5の全てが該当するのではなく、所定の条件に基づいて例えば地点P1、P2およびP4が該当することとなる。所定の条件は、例えば、ナビゲーション装置100を搭載した車両の現在地を表す地点Pから、その車両の移動方向を表す破線510に対して、両側に所定値θずつの角度をなす破線520および530の間に挟まれた破線510を含む範囲に位置することであるものとする。したがって、その所定の条件の下では、破線520および530の間に挟まれた破線510を含む範囲に位置する地点P1、P2およびP4が目的地として推定されるが、その範囲に属さない地点P0、P3およびP5は目的地として推定されない。なお、所定の条件は、例えば、破線520および530の間に挟まれた破線510を含む範囲に位置することであるとともに、地点Pから所定の距離d以内に位置すること、すなわち円弧540よりも地点P側の範囲であることとしてもよい。
【0037】
以上にて説明した実施の形態のナビゲーション装置100は、ナビゲーション装置100を搭載した車両が複数の特定の地点P0〜P5のそれぞれへ移動した際に複数の特定の地点P0〜P5の位置情報を、現在地検出装置120を用いて収集し、その車両の移動方向を、現在地検出装置120を用いて検出するCPU110を有する。CPU110は、さらに、その車両の現在地の位置情報を、現在地検出装置120を用いて収集し、複数の特定の地点P0〜P5の位置情報とその車両の移動方向と現在地の位置情報とに基づき、その車両の目的地を推定し、現在地から推定された目的地までの経路を探索し、その車両がその経路を移動して目的地へ到着する際の到着予定時刻を算出する。したがって、複数の特定の地点P0〜P5の全てではなく、移動方向に位置する地点P1、P2およびP4が目的地として推定されるという作用効果を奏する。
【0038】
−−−変形例−−−
以上で説明した実施の形態のナビゲーション装置100を、次のように変形することもできる。
(1)上述した一実施の形態において、CPU110に、図2のステップS235およびS245のみを実行させるとともに、図4のステップS415、S420、S430、S435、S440およびS445のみを実行させることによっても、上述した一実施の形態のナビゲーション装置100と同様の作用効果を奏することができる。
【0039】
(2)上述した一実施の形態における図4のステップS455およびS460では、ステップS435で目的地として推定された地点のうちのいずれの地点を目的地として決定するかについて、ユーザからの入力に基づいて決定することとした。しかし、ステップS445で算出された地点P1、P2およびP4に到着する到着予定時刻と、図3の移動履歴情報に含まれる地点P1、P2およびP4への到着時刻とを、地点P1、P2およびP4のそれぞれについて比較して、ステップS445で算出された到着予定時刻に最も近い到着時刻に対応する、移動履歴情報に含まれる地点を目的地であるとして決定してもよい。
【0040】
(3)上述した一実施の形態における図4のステップS410では、ナビゲーション装置100を搭載した車両のイグニッションもしくは電源がオンされたとき、またはその車両のイグニッションまたは電源がオンされた後、ユーザ入力装置130を介してユーザから目的地推定指示が入力されたとき、目的地推定指示が有ったと判定されることとした。しかし、補助記憶装置140の道路地図データが交通信号機を有する交差点の位置情報を含む場合、図4のステップS420で収集される現在地の位置情報に基づき、ナビゲーション装置100を搭載した車両が交通信号機を有する交差点の近傍に位置し、かつ車速センサ123を介して計測されたその車両の移動速度が略零であるとき、すなわちその車両がその交差点近傍で信号待ちを行っていると推定されるとき、目的地推定指示が有ったと判定されることとして、推定される目的地への到着予定時刻がディスプレイモジュール150の表示画面上に表示されることとしてもよい。
【0041】
(4)上述した一実施の形態における図4のステップS435では、図5に示すような所定の条件に基づいて地点P1、P2およびP4が目的地であると推定した。しかし、図3に示す移動履歴情報の目的地のデータを参照して、ナビゲーション装置100を搭載した車両が到着した頻度が所定レベルよりも大きい地点を、目的地として推定することとしてもよい。
【0042】
(5)上述した一実施の形態および変形例の説明では、本発明をナビゲーション装置100に適用した実施の形態を説明したが、PND(Personal Navigation Device)、PDA(Personal Digital Assistant)、携帯電話機、ポータブルパソコン、あるいはポータブルゲーム機に本発明を適用してもよい。
【0043】
上述した各実施の形態および各変形例は、それぞれ組み合わせてもよい。また、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における機器構成に何ら限定されない。
【符号の説明】
【0044】
100 ナビゲーション装置 110 CPU
115 主記憶装置 120 現在地検出装置
121 GPS受信機 122 ジャイロセンサ
123 車速センサ 130 ユーザ入力装置
140 補助記憶装置 150 ディスプレイモジュール
155 スピーカ 160 通信装置
510、520、530 破線 540 円弧
【特許請求の範囲】
【請求項1】
移動体が複数の特定の地点のそれぞれへ移動した際に前記複数の特定の地点の第1位置情報を収集する第1情報収集手段と、
前記移動体の移動方向を検出する検出手段と、
前記移動体の現在地の第2位置情報を収集する第2情報収集手段と、
前記第1情報と前記移動方向と前記第2位置情報とに基づき、前記移動体の目的地を推定する推定手段と、
前記現在地から前記推定手段によって推定された前記目的地までの経路を探索し、前記移動体が前記経路を移動して前記目的地へ到着する際の到着予定時刻を算出する算出手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記現在地から前記移動方向に対して所定値以内の角度をなす方向に位置する地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記現在地から前記移動方向に対して所定値以内の角度をなす方向に位置し、かつ前記現在地から所定の距離以内に位置する地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記移動体が到着した頻度が所定レベルよりも大きい地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記複数の特定の地点のそれぞれにおいて前記第1位置情報の収集が前記移動体のユーザによって指示されたとき、前記第1位置情報を収集することを特徴とするナビゲーション装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記複数の特定の地点のそれぞれにおいて前記移動体の駆動源供給の停止が指示されたとき、前記第1位置情報を収集することを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、緯度および経度によって表されることを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、道路地図データのメッシュコード、リンク番号、およびノード番号によって表されることを特徴とするナビゲーション装置。
【請求項9】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、道路地図データのPOI識別子によって表されることを特徴とするナビゲーション装置。
【請求項10】
請求項1乃至9のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記第1位置情報とともに前記複数の特定の地点のそれぞれへの前記移動体の到着時刻を収集し、
前記推定手段は、前記複数の特定の地点のうち、前記移動体が前記現在地から前記複数の特定の地点のそれぞれへ移動した場合の到着予想時刻が前記到着時刻に最も近い地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項11】
請求項1乃至10のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記移動体のユーザによって指示されたとき、前記目的地を推定することを特徴とするナビゲーション装置。
【請求項12】
請求項1乃至11のいずれか1項に記載のナビゲーション装置において、
交通信号機を有する交差点の第3位置情報を記憶する記憶手段と、
前記移動体の移動速度を計測する計測手段とを備え、
前記第2情報収集手段によって収集された前記第2位置情報に基づいて得られる前記現在地が、前記記憶手段によって記憶される前記第3位置情報に基づいて得られる前記交差点の位置の近傍に位置し、かつ前記計測手段によって計測された前記移動速度が略零であるとき、前記推定手段は前記目的地を推定することを特徴とするナビゲーション装置。
【請求項13】
請求項1乃至12のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記移動体の駆動源供給の開始が指示されたとき、前記目的地を推定することを特徴とするナビゲーション装置。
【請求項1】
移動体が複数の特定の地点のそれぞれへ移動した際に前記複数の特定の地点の第1位置情報を収集する第1情報収集手段と、
前記移動体の移動方向を検出する検出手段と、
前記移動体の現在地の第2位置情報を収集する第2情報収集手段と、
前記第1情報と前記移動方向と前記第2位置情報とに基づき、前記移動体の目的地を推定する推定手段と、
前記現在地から前記推定手段によって推定された前記目的地までの経路を探索し、前記移動体が前記経路を移動して前記目的地へ到着する際の到着予定時刻を算出する算出手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記現在地から前記移動方向に対して所定値以内の角度をなす方向に位置する地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項3】
請求項2に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記現在地から前記移動方向に対して所定値以内の角度をなす方向に位置し、かつ前記現在地から所定の距離以内に位置する地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記複数の特定の地点のうち、前記移動体が到着した頻度が所定レベルよりも大きい地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項5】
請求項1乃至4のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記複数の特定の地点のそれぞれにおいて前記第1位置情報の収集が前記移動体のユーザによって指示されたとき、前記第1位置情報を収集することを特徴とするナビゲーション装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記複数の特定の地点のそれぞれにおいて前記移動体の駆動源供給の停止が指示されたとき、前記第1位置情報を収集することを特徴とするナビゲーション装置。
【請求項7】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、緯度および経度によって表されることを特徴とするナビゲーション装置。
【請求項8】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、道路地図データのメッシュコード、リンク番号、およびノード番号によって表されることを特徴とするナビゲーション装置。
【請求項9】
請求項1乃至6のいずれか1項に記載のナビゲーション装置において、
前記第1位置情報および前記第2位置情報は、道路地図データのPOI識別子によって表されることを特徴とするナビゲーション装置。
【請求項10】
請求項1乃至9のいずれか1項に記載のナビゲーション装置において、
前記第1情報収集手段は、前記第1位置情報とともに前記複数の特定の地点のそれぞれへの前記移動体の到着時刻を収集し、
前記推定手段は、前記複数の特定の地点のうち、前記移動体が前記現在地から前記複数の特定の地点のそれぞれへ移動した場合の到着予想時刻が前記到着時刻に最も近い地点を、前記目的地として推定することを特徴とするナビゲーション装置。
【請求項11】
請求項1乃至10のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記移動体のユーザによって指示されたとき、前記目的地を推定することを特徴とするナビゲーション装置。
【請求項12】
請求項1乃至11のいずれか1項に記載のナビゲーション装置において、
交通信号機を有する交差点の第3位置情報を記憶する記憶手段と、
前記移動体の移動速度を計測する計測手段とを備え、
前記第2情報収集手段によって収集された前記第2位置情報に基づいて得られる前記現在地が、前記記憶手段によって記憶される前記第3位置情報に基づいて得られる前記交差点の位置の近傍に位置し、かつ前記計測手段によって計測された前記移動速度が略零であるとき、前記推定手段は前記目的地を推定することを特徴とするナビゲーション装置。
【請求項13】
請求項1乃至12のいずれか1項に記載のナビゲーション装置において、
前記推定手段は、前記移動体の駆動源供給の開始が指示されたとき、前記目的地を推定することを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−68422(P2013−68422A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205081(P2011−205081)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]