
ニオイ測定装置
【課題】測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置を提供する。
【解決手段】ニオイ測定装置は、ROMに、快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義されたニオイ感応マップに、半導体ガスセンサの出力電圧から算出された27個の特徴値による自己組織化マップを分割して非線形投影したニオイ感応投影マップが格納されている。半導体ガスセンサの出力から特徴値を算出してニオイ感応投影マップに入力し、ニオイ感応マップの2次元座標上の原点からの位置ベクトルを算出する。位置ベクトルの2次元座標上の方向及び大きさが、ニオイガスを人が嗅いだときのニオイ及びその程度に対応する。
【解決手段】ニオイ測定装置は、ROMに、快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義されたニオイ感応マップに、半導体ガスセンサの出力電圧から算出された27個の特徴値による自己組織化マップを分割して非線形投影したニオイ感応投影マップが格納されている。半導体ガスセンサの出力から特徴値を算出してニオイ感応投影マップに入力し、ニオイ感応マップの2次元座標上の原点からの位置ベクトルを算出する。位置ベクトルの2次元座標上の方向及び大きさが、ニオイガスを人が嗅いだときのニオイ及びその程度に対応する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はニオイ測定装置に係り、特に、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置に関する。
【背景技術】
【0002】
我国の悪臭防止法で規定されている嗅覚測定法は、臭気判定士により管理され、一定の嗅覚試験に合格したパネルにより実際の官能試験が行われる。しかしながら、1検体あたりの測定時間は20〜40分程度必要であり、嗅覚疲労等のパネルの疲労を考えると、1日に測定できる検体数は10試料に満たない。従って、安定してニオイを測定可能なニオイ測定装置で予備的にニオイを測定して、問題のあるニオイについて、パネルによる官能試験を行う方が効率的である。
【0003】
このため、従来、半導体ガスセンサによりニオイ(臭気)ガスの濃度に応じた抵抗値変化と、パネラによるニオイガスの示す臭気強度との対応関係を表した検量線を作成し、この検量線に基づいて測定した検体のニオイ強度を算出する技術が開示されている(例えば、特許文献1参照)。また、半導体ガスセンサとニオイ強度との関係を、人の感覚強度に合わせて予め設定しておき、半導体ガスセンサからの出力をニオイ強度に変換することで、ニオイ強度の診断を行う方法が開示されている(例えば、特許文献2参照)。更に、小型化を図るために、一つの半導体ガスセンサを用いて複数のニオイ物質を検出する場合に、半導体ガスセンサからの出力が同一となるように調整する技術も開示されている(例えば、特許文献3参照)。
【0004】
なお、本発明に関連する技術として、人の快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標上の快適度ベクトルモデルが開示されている(例えば、非特許文献1参照)。また、コホーネン(Kohonen)によって開発された自己組織化マップが知られている(例えば、非特許文献2参照)。
【0005】
【特許文献1】特開平05−188027号公報
【特許文献2】特開平08−320316号公報
【特許文献3】特開2004−233326号公報
【非特許文献1】「快適度の客観的評価と脳波計測」JASE SYMPOSIUM No.06−04,13−22 2004 吉田 倫幸
【非特許文献2】「自己組織化マップ(Self-OrganizingMap)の基礎」ISDL Report No.20050822007 2006年1月8日 伊藤 冬子、廣安 知之、三木 光範
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1〜3の技術では、半導体ガスセンサの出力を人のニオイ感覚に合うようにニオイ強度を調整する一次元的な処理を行い、悪臭に対するニオイ測定を主題としているため、人のニオイ感覚を総合的に測定し、その感覚を表現することは難しい。つまり、従来技術では、例えば、快適なニオイや、わくわくするニオイに対して、人の感覚と同じように測定することは難しかった。
【0007】
本発明は上記事案に鑑み、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は、測定対象のニオイガスをチャンバ内に導入するガス導入手段と、前記チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサと、前記ガス導入手段で前記チャンバ内にニオイガスが導入された状態で前記半導体ガスセンサの出力を測定する測定手段と、前記測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値を算出する特徴値算出手段と、種々のニオイガスに対し前記特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、前記種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップを予め記憶した記憶手段と、前記記憶手段に記憶されたニオイ感応投影マップに前記特徴値算出手段で算出された複数の特徴値を入力して、前記ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが前記測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルを算出するニオイ算出手段と、を備える。
【0009】
本発明のニオイ測定装置は、チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサを備えており、ガス導入手段により測定対象のニオイガスがチャンバ内に導入され、チャンバ内にニオイガスが導入された状態で測定手段により半導体ガスセンサの出力が測定される。特徴値算出手段により測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値が算出される。記憶手段には、種々のニオイガスに対し特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップが予め記憶されている。ニオイ算出手段により、記憶手段に記憶されたニオイ感応投影マップに特徴値算出手段で算出された複数の特徴値を入力して、ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルが算出される。
【0010】
本発明において、ニオイ算出手段で算出された位置ベクトルをニオイ感応マップの2次元座標上に表示する表示手段を更に備えていれば、オペレータが表示手段を参照することによりニオイを視覚的に把握することができる。自己組織化マップは、該自己組織化マップを構成する各ノードにランダムな初期値を与え、各ノード間距離が最適になるようにノード結合重みが算出されていることが好ましい。また、ニオイ感応投影マップは、複数に分割された自己組織化マップが平行移動、回転、及び変形されることによりニオイ感応マップに非線形投影されていることが望ましい。更に、特徴値は、半導体ガスセンサの出力電圧の最大値、該最大値をとる時間、半導体ガスセンサの出力電圧の時間による微分最大値、該微分最大値をとる時間、及び、半導体ガスセンサのうち少なくとも1の半導体ガスセンサのヒータ電圧に動的非線形信号を印加し、該少なくとも1つの半導体センサの出力電圧を高速フーリエ変換したときの主成分を含むようにしてもよい。また、ニオイ算出手段で算出された位置ベクトルが、2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、測定対象のニオイガスを人が嗅いだとき、それぞれ、わくわく、かいてき、たいくつ、いらいらするニオイと翻訳する翻訳手段を更に備えるようにしてもよい。このとき、翻訳手段は、位置ベクトルの大きさを数値化し、該数値を含む述語を組み合わせた文章によって、ニオイガスを人が嗅いだときの感覚として翻訳すれば、装置に不慣れなオペレータでも測定対象のニオイガスのニオイを把握することができる。このとき、翻訳手段で組み合わされた文章を表示手段で表示することが望ましい。
【発明の効果】
【0011】
本発明によれば、ニオイ算出手段により、方向及び大きさがニオイガスを人が嗅いだときのニオイ及びその程度として対応する、ニオイ感応マップの2次元座標上の位置ベクトルが算出されるので、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置を実現することができる、という効果を得ることができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明に係るニオイ測定装置の最良の実施の形態について説明する。
【0013】
(構成)
図1に示すように、本実施形態のニオイ測定装置1は、正面にフロントパネル3と、他の5面を覆い後述するように機構部、制御部及び電源部を内蔵した箱状の筺体2を有している。フロントパネル3の上部には、情報を表示すると共に、オペレータから操作命令を受けるためのタッチパネル7が配置されている。
【0014】
フロントパネル3の下部からは、ニオイ測定対象の検体周囲のガス(以下、ニオイガスという。)を後述するチャンバ内に導くためのサンプル管5が導出されている。サンプル管5には、外径4mm、内径3mmで、比較的ガス成分の吸着が少ないポリテトラフルオロエチレン(PTFE)製チューブが用いられている。サンプル管5の一端側(先端側)には、ニオイガス測定の際にオペレータが検体に向けて把持するためのグリップ6が固着されている。オペレータが外径4mmのサンプル管5を安定して把持することは難しいため、グリップ6には、最大直径φ25mm、長さ150mmの樹脂製のものが用いられている。なお、グリップ6は、ニオイガス測定時以外は、フロントパネル3の上部側面に配置されたグリップホルダ4内に収容される(図1に示す状態)。
【0015】
グリップ6内にはサンプル管5が埋設されており、フロントパネル3からのグリップ6の端部までのサンプル管5の長さは90cmに設定されている。すなわち、サンプル管5の長さは、オペレータが検体にグリップ6を向けると共に、タッチパネル7にタッチし易い長さとされている。
【0016】
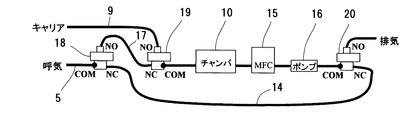
図2に示すように、ニオイ測定装置1の機構部は、3つの電磁3方弁(以下、電磁弁という。)18、19、20、複数の半導体ガスセンサ等を内蔵したチャンバ10、チャンバ10の下流側に配置されチャンバ10内に流れる気体流量を一定量に制御するマスフローコントローラ(以下、MFCという。)15、MFC15の下流側に配置されチャンバ10内に流れる気体を吸引するポンプ16、キャリアガス(清浄された空気)を発生させる図示を省略したキャリアガス発生ユニット、及び、これらを接続する外径3mm、内径2mmのPTFE製チューブで構成されている。
【0017】
サンプル管5の他端側は電磁弁18のCOMポートに接続されており、電磁弁18のNOポートはチューブ17で電磁弁19のNCポートに接続されている。電磁弁19のNOポートはチューブ9でキャリアガス発生ユニットに接続されており、電磁弁19のCOMポートはチューブでチャンバ10の一側に接続されている。チャンバ10の他側はチューブでMFC15の一側に接続されており、MFC15の他側はチューブでポンプ16の一側(吸引側)に接続されている。ポンプ16の他側(排出側)はチューブで電磁弁20のCOMポートに接続されており、電磁弁20のNOポートはチューブで筺体2に形成された排気口(不図示)まで導出されている。また、電磁弁18及び電磁弁20のNCポート同士は、チューブ14で接続されている。なお、チャンバ10やMFC15の接続では、気密性を確保するために、フェラルを有するコネクタジョイントが用いられている。
【0018】
キャリアガス発生ユニットは、筒状のカラム内に活性炭とシリカゲルとが充填されており、その両端面にはチューブ9内への異物の侵入を防止するためのメッシュが配設されている。キャリアガス発生ユニットの一端面側は、筺体2から若干外側に突出(露出)しており、他端面側の外周には雄ねじが螺設されている。電磁弁19のNOポートから導出されたチューブ9は筺体2に固定された円盤状の装着フランジの中央部に接続されている。装着フランジは側周面を有した断面コ字状の形状を有しており、側周面には雌ねじが螺設されている。このため、装着フランジの側周面に螺設された雌ねじにキャリアガス発生ユニットの雄ねじを羅合させることで、筺体2の外部からキャリアガス発生ユニットの装着ないし交換が可能である。キャリアガス発生ユニットが装着フランジに装着された状態でポンプ16の吸引力で吸引されると、キャリアガス発生ユニットの一端面側から外気が取り込まれ、取り込まれた外気が活性炭とシリカゲルとで清浄され、キャリアガスを他端面側から排出する。
【0019】
本実施形態では、ポンプ16に、KNF社製の型式番号830KNDCを使用した。このポンプの概略仕様は、定格電圧12V、流量(気体吸引量)3.1リットル/分、サイズ77×30.7×53.5mmである。MFC15には、ESTEC社製の型式番号E40を使用した。このMFCの概略仕様は、定格電圧±15V、流量レンジ0〜400ミリリットル/分、流量精度±1%である。また、電磁弁18、19、20には、CKD社製の型式番号AG31−01−2を使用した。この電磁弁の応答速度は数十ミリ秒であり、内部はPTFE加工が施されている。
【0020】
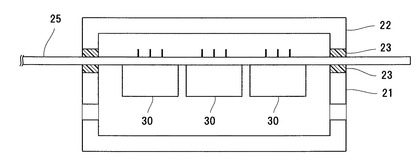
図3に示すように、チャンバ10は、ステンレス製で箱形のチャンバ下蓋21、チャンバ上蓋22、枠状のゴムパッキン23及びステンレス製ボルト(不図示)で構成されており、基板25にマウントされた複数の半導体ガスセンサ30をチャンバ内に密閉した構造が採られている。すなわち、半導体ガスセンサ30がマウントされた基板25を、ゴムパッキン23を介して上下両側から挟み、気密性を保持するために、チャンバ上蓋22側及びチャンバ下蓋21側の両側から、それぞれチャンバ下蓋21及びチャンバ上蓋22に達する長さのステンレス製ボルトで締め付けられている。なお、チャンバ下蓋21及びチャンバ上蓋22は、半導体ガスセンサ30等に対しチャンバ10の外部で発生するノイズを遮断するために、筺体2に電気的に接続されたシールド構造を有している。
【0021】
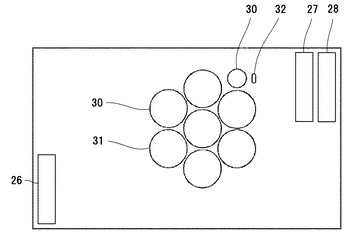
図4に示すように、チャンバ10内には、7個の半導体ガスセンサ30、1個の湿度センサ31、1個の温度センサ(サーミスタ)32の合計9個のセンサが収容されている。一般に、チャンバ10の内容積はセンサの応答性を高めるために、小さい方が好ましい。本実施形態では、9個のセンサを基板25上に密集配置することで、チャンバ下蓋21と基板25(基板25上にマウントされたセンサ等の部品を除く。)とが画定する内容積を約35ミリリットルとした(図3も参照)。なお、チャンバ上蓋22と基板25とが画定する空間は、センサから導出されたピンや基板25の裏面側(図3の上側)にマウントされた回路素子を収容するために形成されたものである。
【0022】
本実施形態では、半導体ガスセンサ30として、メタンに感応するTGS2611、アミン系ガスに感応するTGS826、エタノールに感応するTGS822、主に調理臭や空気の汚れに感応するTGS2600、有機ハロゲンに感応するTGS832、メタノールに感応するTGS2620、イオウ系ガスに感応するTGS2602(いずれも、フィガロ技研(株)の型式番号)を使用した。
【0023】
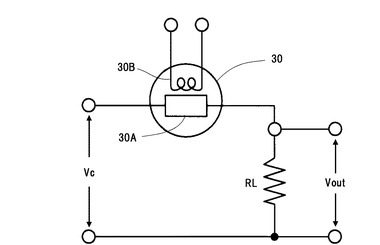
図5に示すように、半導体ガスセンサ30は、例えば、アルミナセラミックチューブの周部に酸化スズ(SnO2)の微粒子を焼結した円筒状のn型酸化物半導体30Aを有している。アルミナセラミックチューブは中空とされており、アルミナセラミックチューブ内にヒータコイル30Bが挿入されている。n型酸化物半導体30Aの両端にはそれぞれ2個の電極がプリントされており、これらの電極にリードの一端が接合されている。リードの他端及びヒータコイル30Bのリードの両端は円柱状の樹脂成形ベースの上面周縁部にプリントされたパッドにワイヤボンディングされている。樹脂成形ベースの上部には樹脂成形ベースと同外径で円筒状の樹脂成形筒が樹脂成形ベースに接着されており、n型酸化物半導体30Aは樹脂成形ベースの上面に接触しないように樹脂成形筒の中央部に配置されている。樹脂成形ベース及び樹脂成形筒の外周部には筒状の樹脂カバーの内周が接着されており、樹脂カバーの上部には図示しないステンレス製のメッシュがはめ込まれた開口が形成されている。また、樹脂成形ベースの各パッドからはピンが立設されている。
【0024】
n型酸化物半導体30Aはヒータコイル30Bにより感応気体に応じて200°C〜400°Cに加熱され還元性ガスを検出する。大気中で酸素はn型酸化物半導体30Aの表面に負イオン吸着しており、還元性ガスが存在するとn型酸化物半導体30A表面で還元性ガスによる酸化反応が起こる。このとき、吸着酸素に捕捉されていた電子が半導体へ移行しn型酸化物半導体30Aに導電率の変化が生じ、この導電率の変化を検出することにより還元性ガスの存在や濃度を検出することができる。
【0025】
各半導体ガスセンサ30は、n型酸化物半導体30Aに、半導体ガスセンサ30からの出力電圧Voutを取り出すための検出抵抗RLを直列に挿入し作動電圧Vcが印加されると共に、ヒータ30Bにヒータ電圧が印加される。出力電圧Voutは検出抵抗RLの両端電圧とされている。なお、作動電圧Vc及び出力電圧Voutの低電位側はグランドとされている。
【0026】
本実施形態のニオイ測定装置1では、半導体ガスセンサ30の出力電圧Voutをサンプリングレート100Hzで取得する。n型酸化物半導体30Aの抵抗値をR0(Ω)、検出抵抗RLの抵抗値をRL(Ω)、作動電圧Vcの電圧値をVc(V)、出力電圧Voutの電圧値をVout(V)とすると、抵抗値R0は、R0={(Vc−Vout)/Vout}×RLで与えられる。従って、n型酸化物半導体30Aの初期値に対する比抵抗値をRiとすると、比抵抗値Riは、Ri=(R0/Rs)−1で与えられる。
【0027】
図4に示すように、基板25の一側には、(湿度センサ31や温度センサ32を含む)全てのセンサへの作動電圧を供給するための作動電圧コネクタ27及び各半導体ガスセンサ30のヒータ30Bへのヒータ電圧を供給するためのヒータ電圧コネクタ28がマウントされており、他側には、各検出抵抗RL両端の出力電圧Voutを出力するための出力電圧コネクタ26がマウントされている。なお、チャンバ10の外側で、かつ、出力電圧コネクタ26側の基板25の領域には、検出抵抗RLがマウントされている(図4では不図示)。
【0028】
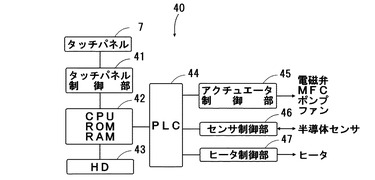
図6に示すように、ニオイ測定装置1の制御部は、ニオイ測定装置1全体を制御するコンピュータ42を有している。コンピュータ42は、中央演算装置として機能するCPU、コンピュータ42の基本動作プログラム及びニオイ解析エンジン(後述するニオイ感応投影マップ)やプログラムデータを格納したROM、CPUのワークエリアとして機能するRAM及びインターフェース等を含んで構成されている。
【0029】
コンピュータ42の外部バスには、タッチパネル7の表示や操作命令を制御するタッチパネル制御部41及び検体に対するニオイ測定結果等を記憶するハードディスク(HD)43が接続されている。なお、タッチパネル制御部41は、タッチパネル7に接続されている。また、コンピュータ42には、インターフェースを介してプログラマブルロジックコントローラ(PLC)44に接続されている。
【0030】
PLC44は、CPU、ROM、RAMの他に、D/Aコンバータ、A/Dコンバータ及びI/Oを有して構成されている。本実施形態では、PLC44に、KEYENCE社製の型式番号KV−700を使用した。PLC44は、電磁弁18〜20、MFC15、ポンプ16等のアクチュエータを制御するアクチュエータ制御部45、各半導体ガスセンサ30に応じて作動電圧Vcを供給し、上述したように100Hzで各検出抵抗RLの出力電圧Voutのサンプリングを行うセンサ制御部46、及び、各半導体ガスセンサ30に応じて独立してヒータ電圧を供給するヒータ制御部47に接続されている。なお、PLC44は、センサ制御部46から出力(サンプリング)された各出力電圧Voutのアナログ電圧をA/Dコンバータによりデジタル電圧に変換した後、イーサネット(Ethernet)(登録商標)を介してコンピュータ42に送出する。従って、PLC44は、コンピュータ42からの命令によりアクチュエータ制御部45、センサ制御部46、ヒータ制御部47を制御すると共に、コンピュータ42に出力電圧Voutを送出するスレーブコンピュータとして機能する。
【0031】
ニオイ測定装置1の電源部(不図示)は、100V、400W商用交流電源から24V直流電源に変換する第1電源ユニット、24V直流電源から12V直流電源に降圧する第2電源ユニット、レギュレータを備え商用交流電源から定格±15Vの電源に変換する第3電源ユニット、3端子レギュレータを備え12V直流電源から5V直流電源に降圧する第4電源ユニットを有している。なお、本実施形態のニオイ測定装置1は、PLC44、タッチパネル7が第1電源ユニットから供給される電圧、コンピュータ42、ポンプ16、電磁弁18〜20が第2電源ユニットから供給される電圧、MFC15が第3電源ユニットから供給される電圧、各センサが第4電源ユニットから供給される電圧でそれぞれ作動する。
【0032】
また、ニオイ測定装置1は、MFC15、ポンプ16、制御部40等の発熱部を有しているため、これらを冷却するための図示しない複数のファンユニットを備えている。これらのファンユニットは、筺体2の裏面側(フロントパネルの反対側)近傍に配置されており、筺体2の裏面には排気用の開口が形成されている。
【0033】
次に、ROMに格納されたニオイ解析エンジン(ニオイ感応投影マップ)の作成手順について説明する。
【0034】
<ニオイ感応マップの作成>
(1)被検者30人に静寂な室温(25°C)環境下で特定のニオイガスを嗅がせ、脳波データを測定した。このとき、脳波データから基礎律動波を取り出すためのフィルタに通した。脳波データの取得には、頭皮上に配設した2つの電極間の電位差を増幅して取り出す双極導出法を用い、頭皮上の電極配置部位は国際式10−20法を用いた。
【0035】
(2)フィルタ出力に定電位クロス法を適用して変動する波の周期を捉えた。このとき、クロス電位(閾値電位幅)の設定はフィルタ波の振幅をモニタしながら調整した。フィルタ波の電位が設定した片側閾値電位(+)以上の波を閾値電位を越えた時点をチェックし、個々のチェック間隔(周期に対応した時間幅を持つ)を瞬間の周波数に変換した。
【0036】
(3)瞬時周波数の時系列データに高速フーリエ変換法を適用し、スペクトルを抽出した。1つのスペクトルを算出する時間は25.6sで、サンプル点数512点を計算に用いた(50ms刻みのタイムテーブルを作り、算出した周期を50ms(20Hz)毎に再サンプリングした周波数データを使用した。)。スペクトル表示上の最低周波数は1/25.6s、最高周波数は10Hzとなる。計4単位時間(102.4s)の平均スペクトルを求め、これをゆらぎスペクトルとした。
【0037】
(4)次に、横軸にゆらぎスペクトルの周波数、縦軸に各ゆらぎスペクトルの周波数に対応したスペクトル密度をとって、ゆらぎ特性を両軸常用対数グラフ上に表示した。スペクトルの傾斜度を数値化するために、変曲点を検出して低周波数領域と高周波数領域とに二分し、各領域でゆらぎ周波数の対数変換値を独立変数、スペクトル密度の対数変換値を従属変数にとって直線回帰式を算出し、その傾き係数で傾斜度を代表させた。
【0038】
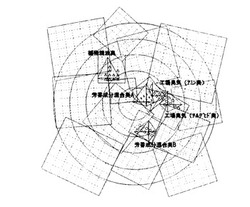
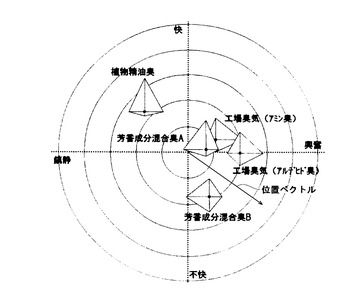
(5)公知のヘラー(Heller,w)の2次元モデル、又は、上述した非特許文献1の快適度ベクトルモデルと同様、図7に示すように、興奮、沈静の程度を表す座横軸標系と、快、不快の程度を表す縦軸座標系とで定義される2次元座標系を準備し、被検者の脳波データについて当該2次元座標の原点Oからの位置ベクトルを算出した。すなわち、左前頭部の周波数ゆらぎの傾斜度をFp1slope、右前頭部の周波数ゆらぎの傾斜度をFp2slopeとすると、位置ベクトルの角度及び大きさは次式(1)で与えられる。なお、角度は原点Oと興奮座標系とを結ぶ方向を0°とした。
【0039】
【数1】

【0040】
図7は、上記(1)〜(5)に従って、被検者30人に5種類のニオイ(植物精油臭、アミン臭、アルデヒド臭、芳香成分混合臭A、芳香成分混合臭B)を嗅がせたときの位置ベクトルをマップ化したニオイ感応マップを表している。図7において、各四角形の中心(対角線交点)は被検者集団の平均値を表し、各四角形の中心から各四角形の頂点までの距離が標準偏差に比例している。本実施形態では、ニオイ感応マップの全方向が埋まるように、被検者30人に数十種のニオイを嗅がせたときの位置ベクトルを表したニオイ感応マップを用いた。
【0041】
<自己組織化マップの構築>
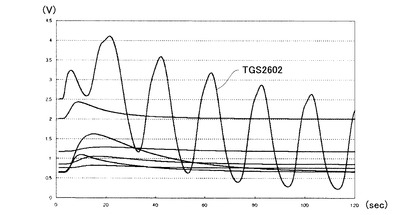
(6)上述した数十種のニオイガスについて、室温環境下で、ニオイ測定装置1の機構部(図2参照)を清浄した後、ポンプ15及びMFC15を作動させ、各ニオイガスをチャンバ10内に導入し、1分間、各半導体ガスセンサ30の出力電圧Voutをサンプリングレート100Hzで取得して、時系に従ってメモリに記憶した。このとき、TGS2602を除く、TGS2611、TGS826、TGS822、TGS2600、TGS832、TGS2620の6個の半導体ガスセンサのヒータコイル30Bには5Vの定電圧を印加し、TGS2602のヒータコイル30Bには1.5Vから5.2Vまでの余弦波を20秒周期(動的非線形信号)で印加した。図8は、7個の半導体ガスセンサ30の出力電圧を模式的に示したものである。
【0042】
(7)メモリに時系に従って記憶した各半導体ガスセンサ30の出力電圧Voutのうち、TGS2602を除く6個の半導体ガスセンサの出力電圧の最大値、その最大値をとるときの時刻、10msを単位時間としたとき(サンプリングレート100Hz)の時間による微分最大値、その微分最大値をとるときの時刻を、当該検体のガスに対する特徴値として算出した。各特徴値は半導体ガスセンサについて4個取得されるため、半導体ガスセンサ6個分では24個取得される。また、TGS2602の出力電圧を高速フーリエ変換して得られた第1成分、第2成分、第3成分の値も特徴値とした。このため、本実施形態では、各半導体ガスセンサの出力電圧Voutから27次元の特徴値を得ることができる。なお、温度センサ32及び湿度センサ31は、各半導体ガスセンサ30のガス感応性が温度及び湿度に依存することから、測定した温度及び湿度により予め設定された温度−湿度補正テーブルで各半導体ガスセンサ30の出力電圧Voutを補正した。
【0043】
(8)次に、100×100のノードからなる自己組織化マップ(Self-Organizing Map、以下、SOMと略称する。)を作成し、各ノードに適当(ランダム)な初期値を与え、各ノード間距離が最適となるように、コホーネン学習則に従い、各ノードの結合重みを計算した。
【0044】
ここで、SOM及びコホーネン学習則について簡単に説明する。なお、両者は上述した非特許文献2の通り公知であり、例えば、インターネット等により更なる詳細事項を把握することができる。
【0045】
SOMは、コホーネン(Kohonen)によって開発された2層型ニューラルネットワークの一種である。一般に、ニューロンの基本的なモデルは、mi(t+1)=mi(t)+hci(t){x(t)−mi(t)}で表され、多数の入力xiの線形加重和Σxiwiがある閾値より大きい場合に「1」、そうでない場合に「0」を出力する。図9に示すように、SOMの第1層はn次元の入力層x(t)であり、第2層は競合層と呼ばれ一般に2次元配列となっている。競合層のベクトルは、参照ベクトルmi(t)で表され、入力層のn次元と同様にn個の要素を持つ。
【0046】
コホーネン学習則では、以下の手順により、SOMに対して教師なしの競合学習が行われる。(A)すべての参照ベクトルmiの要素をランダムに決定する。(B)入力ベクトルX(t)を与える。このとき、x(t)とのユークリッド距離(x−miの絶対値)が最小となるニューロンiを探す。このニューロンをcとすると、abs(x−mc)=min{abs(x−mi)}と表すことができる。(C)参照ベクトルmcを持つニューロンを勝者ユニットとする。(D)勝者ユニット及びその周辺の近傍Nc内のユニットは次式に従って入力ベクトルを学習する:mi(t+1)=mi(t)+hci(t){x(t)−mi(t)}。ただし、hciは近傍関数であり、i∈Ncならhci=α(t)、そうでないならhci=0と定義する(α(t)は学習率係数)。(E)上記(B)〜(D)をT回繰り返し、学習を行う。近傍サイズはNc=Nc(t)という時間の関数で表され、学習とともにそのサイズを小さくしていく。(F)すべての入力ベクトルに対して、上記(B)〜(E)を繰り返し行うことにより、各入力ベクトルに類似したユニットが集まるようになる。
【0047】
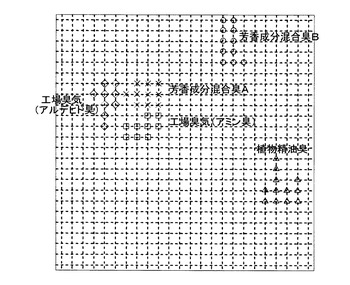
図10は、上記手順により、上述した5種類のニオイガスの特徴値に基づいて構築したSOMを模式的に表したものである。ノードに配置された△、○、□、×、◇の各点には27次元特徴値が対応しており(図9参照)、各点の数がニオイガスに対して半導体ガスセンサ30で測定したおおよその回数を示している(同一ノードに配置され場合の測定回数は現れていない)。
【0048】
<ニオイ感応投影マップの構築>
(9)構築したSOMを分割し、それぞれの分割平面をニオイ感応マップに非線形投影を行った。この非線形投影は、以下の変換行列で表される平行移動、回転、拡大・縮小によって行ったが、更に変形するようにしてもよい。
【0049】
【数2】
【0050】
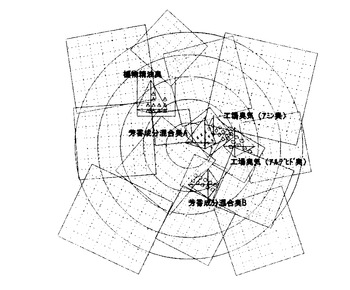
図11は、分割平面をニオイ感応マップに平行移動したときの概念を表している。本実施形態では、ノードに配置された各点がニオイ感応マップの四角形内にほぼ入るように平行移動、回転、拡大・縮小を行った。図12は、以上の手順で構築したニオイ感応投影マップの模式図である。このように、ROMに格納されたニオイ感応投影マップは、ニオイ感応マップにSOMの分割平面が非線形投影されたものであるが、本実施形態では、ニオイ感応投影マップの全方向でニオイ感応マップとSOMとが対応するように、上述した数十種のニオイガスについてニオイ感応投影マップが作成されている。
【0051】
(動作)
次に、本実施形態のニオイ測定装置1の動作について、コンピュータ42のCPU(以下、CPUと略称する。)を主体として説明する。
【0052】
ニオイ測定装置1に電源が投入されると、ROMに格納された基本動作プログラムやニオイ解析エンジンがRAMに展開され、タッチパネル制御部41を介してタッチパネル7にニオイ測定の準備中である旨の初期画面を表示させる初期設定処理を実行する。次いで、CPUは、PLC44からPLC44の初期設定処理終了のステータスを受信すると、検体に対するニオイの測定を行うためのニオイ測定ルーチンを実行する。
【0053】
ニオイ測定ルーチンでは、まず、PLC44、アクチュエータ制御部45を介して電磁弁18〜20をオフ状態(非通電状態)とさせると共に、PLC44、センサ制御部46、ヒータ制御部47を介して、全センサに作動電圧を印加させ半導体ガスセンサ30にヒータ電圧を印加させる(上述したようにTGS2602のヒータコイル30Bには1.5〜5.2Vの余弦波電圧を20秒周期で印加し、それ以外の6個の半導体ガスセンサには5.0Vの定電圧を印加させる。)。次いで、MFC15は安定作動のために電源投入後5分間の暖気と0点補正とが必要なため、ニオイ測定ルーチンの開始からMFC15の安定動作が確保される5分が経過するまで待機する。
【0054】
ニオイ測定ルーチンの開始から5分が経過すると、CPUは、アクチュエータ制御部45にポンプ16を作動させチャンバ10内を清浄するチャンバ清浄処理を実行させる。MFC15により、チャンバ10やチューブ内を流れるキャリアガスの流量は400ミリリットルの一定量に制御されている。キャリアガスは、キャリアガス発生ユニット(→チューブ9)→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部へ排出される。これにより、チャンバ10内及び電磁弁19とチャンバ10とを接続するチューブ内がキャリアガスで清浄されると共に、チャンバ10内に内蔵された各半導体ガスセンサ30が一定温度に維持(冷却)される。ポンプ16を作動させてから更に5分が経過すると、CPUは、タッチパネル7にニオイ測定が可能である旨を表示させ、タッチパネル7に表示されたニオイ測定開始ボタンがタッチされるまで待機する。
【0055】
ニオイ測定開始ボタンがタッチ(押下)されると、CPUは、PLC44に、電磁弁19をオン状態(通電状態)とさせ、検体からのニオイガスを8個の半導体ガスセンサ30で1分間測定したときの出力電圧Voutをデジタル電圧としてCPUに出力させるニオイ測定処理を実行する。このとき、CPUは、出力電圧Voutを上述した温度−湿度補正テーブルで補正し補正後の出力電圧をハードディスク43内に時系列的に格納する。検体からのニオイガスは、サンプル管5→電磁弁18(→チューブ17)→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部へ排出される。CPUは、1分が経過すると、PLC44に後述する清浄処理を実行させると共に、ニオイ測定が終了した旨をタッチパネル7に表示させる。
【0056】
CPUは、ニオイガスの吸引が終了した時点で、PLC44に機構部の清浄処理を実行させる。PLC44は、CPUから清浄処理の実行命令を受けると、電磁弁19をオフ状態とさせ、5分間、チャンバ10内及び電磁弁19とチャンバ10とを接続するチューブ内を清浄する。
【0057】
続いて、PLC44は、電磁弁19をオン状態とさせ、30秒間、外気でチューブ17内を清浄する。サンプル管5には外気が流入し、外気は、サンプル管5→電磁弁18→チューブ17→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部に排出される。
【0058】
次いで、PLC44は、電磁弁18をオン状態、電磁弁19をオフ状態、電磁弁20をオン状態とさせ、30秒間、サンプル管5内を清浄する。この状態では、キャリアガスが、チューブ9→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20→チューブ14→電磁弁18→サンプル管5の順に流れ、サンプル管5の一端側(先端側)から外気に排出される。
【0059】
次に、PLC44は、電磁弁18をオフ状態、電磁弁19をオフ状態、電磁弁20をオフ状態とさせ、5分間、チャンバ10に内蔵された各半導体ガスセンサ30が安定状態となるまで待機する。以上の清浄処理には、合計11分を要するため、この11分の間、タッチパネル7には、清浄中である旨が表示される。PLC44は、清浄処理が終了すると、CPUに清浄処理の終了を報知する。この報知を受けたCPUは、タッチパネル7に機構部の清浄が完了した旨を表示させる。これにより、ニオイ測定装置1は、再度、上述したニオイ測定処理が可能な状態となる。
【0060】
また、CPUは、PLC44による機構部の清浄処理に並行して、ハードディスク43内に格納した7個の半導体ガスセンサ30の出力電圧Voutから、上述した27個の特徴値を算出してニオイ感応投影マップに入力し(SOM上の位置を求め)、SOMが非線形投影されたニオイ感応マップの2次元座標上の座標値、すなわち、原点からの位置ベクトルを得る。次いで、CPUは、ニオイ感応マップ及び得られた位置ベクトルを、タッチパネル制御部41を介してタッチパネル7に表示させる(図7参照)。上述したように、この位置ベクトルの方向及び大きさが、人が測定対象のニオイガスを嗅いだときのニオイ及びその程度に対応するため(上記(5)参照)、オペレータはディスプレイ7を参照することで、ニオイガスのニオイ及びその程度を把握することができる。
【0061】
次に、CPUは、2次元座標上の原点からの位置ベクトルを、オペレータが分かる言葉に翻訳する。図7に示すように、本実施形態では、2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置ベクトルがそれぞれ位置するときに、「わくわくするニオイ」、「かいてきなニオイ」、「たいくつなニオイ」、「いらいらするニオイ」に対応させ、その程度を表す位置ベクトルの大きさ(絶対値)を算出する。上述した式(1)から、位置ベクトルの大きさはパーセントで表される。従って、CPUは、位置ベクトルから、上述した述語と数値とにより、例えば、「いらいらするニオイ70%」等の人が分かる言葉に対応させ(翻訳し)、タッチパネル制御部41を介してタッチパネル7に、ニオイ感応マップに検体のニオイを表すベクトル及び対応させた言葉を表示する。
【0062】
次いで、CPUは、検体に対するニオイ測定が終了した旨をタッチパネル7に表示させると共に、ハードディスク43内に測定結果を格納させてニオイ測定ルーチンを終了する。このとき、測定を行った日付や検体名、検体の位置等の検体の属性情報を併せて記憶させることが好ましい。なお、インターフェースを介して接続されたパーソナルコンピュータを操作することで、プリンタからニオイ測定結果を出力するようにしてもよい。
【0063】
(作用等)
次に、本実施形態のニオイ測定装置1の作用等について説明する。
【0064】
本実施形態のニオイ測定装置1は電磁弁18、20をオフ状態、電磁弁19をオン状態に制御することでニオイガスをチャンバ10内に導入(採取)し、半導体ガスセンサ30でニオイガスの測定を行うことができる。また、電磁弁18〜20を制御することにより、チャンバ10内、電磁弁19とチャンバ10とを接続するチューブ内、チューブ17内、及び、サンプル管5内を清浄することができる。従って、シーケンス制御によりサンプル管5内に残留したニオイガスを含めニオイガスの流路の清浄を行うことができるので、複数の検体に対して精度良くかつ安定してニオイ測定を行うことができる。更に、ポンプ16及びMFC15によりチャンバ10内の気体を一定量(400ミリリットル/分)で吸引するため、ニオイ測定処理で、ニオイガスは吸引されチャンバ10に充たされるので、安定定常状態で半導体ガスセンサ30によりニオイガスを測定することができると共に、装置内にバッファや装置外に呼気だめを設ける必要がない。従って、ニオイ測定装置1のダウンサイジングを図ることができると共に、筺体2外の構成部材を極力小さくすることができる。
【0065】
また、本実施形態のニオイ測定装置1では、ROMに、図12に示したように、快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義されたニオイ感応マップに、半導体ガスセンサ30の出力電圧Voutから算出された27個の特徴値によるSOMを分割し非線形投影したニオイ感応投影マップが格納されている。ニオイ測定装置1は、半導体ガスセンサ30の出力電圧Voutからニオイガスの特徴値を算出して、ニオイ感応投影マップに算出された特徴値を入力して、ニオイ感応マップの2次元座標上の原点からの位置ベクトルを算出し、ディスプレイ7上にニオイ感応マップと位置ベクトルとを表示する。この位置ベクトルの方向及び大きさは測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応するため、ニオイガスを人の感覚で表現することができる。すなわち、本実施形態のニオイ測定装置1は、2次元座標上の位置ベクトルで表現するようにしたので、従来技術のように1つの座標系のメモリを調整する技術に対して、ニオイガスについて包括的(定性的かつ定量的)に捉えることが可能である。
【0066】
また、算出した位置ベクトルからオペレータの分かる言葉に対応させて(翻訳して)タッチパネル7上に表示するので(例えば、「いらいらするニオイ70%」)、ガスのニオイを人の感覚で表現することができる。更に、ニオイ感応投影マップは、ニオイ感応マップの2次元座標の全方向についてSOMに対応しているため、悪臭に限らず、良いニオイに対しても、人の感覚で表現することが可能である。
【0067】
なお、本実施形態では、2つの電磁弁18、19を用いてキャリアガスとニオイガスとを選択的にチャンバ10に導入する例を示したが、本発明はこれに限定されるものではない。例えば、電磁(3方)弁18、19に代えて、1つの電磁4方弁を用いるようにしてもよい。このような構成の場合には、アクチュエータ制御部45の小型化も図ることができ、ひいては、ニオイ測定装置1全体を更に小型化することができる。
【0068】
また、本実施形態では、発明者らが実際に試作したニオイ測定装置1を例示したが、量産化を図る場合には、コンピュータ42とPLC44とを一体化させ制御部の小型化を図るようにしてもよく、また、各部の作動電圧を12V、5Vに統一し、電源部を構成するユニット数を少なくするようにしてもよい。
【0069】
更にまた、本実施形態では、ヒータ制御部47が独立して各半導体ガスセンサ30のヒータコイル30Bにヒータ電圧を供給する構成を採用しているので、ヒータ制御部47は、温度センサ32で計測したチャンバ10内の温度情報をセンサ制御部46から受け取り、例えば、予め設定したテーブルや数式に従って、各半導体ガスセンサ30のガス感応温度が好適な範囲となるように制御するようにしてもよい。
【0070】
また、本実施形態では、ニオイ感応投影マップ(ニオイ感応マップ)上の位置ベクトルが2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、それぞれ、わくわく、かいてき、たいくつ、いらいらすると対応させる例を示したが、より細かく(例えば、30°毎に)人の感覚に対応させるようにしてもよい。
【0071】
そして、本実施形態では、ニオイ測定装置1に搭載された半導体ガスセンサ30で特徴値を算出してニオイ感応投影マップを作成した例を示したが、量産では、半導体ガスセンサ30と同一仕様の半導体ガスセンサで特徴値を演算して作成したニオイ感応投影マップをROMに移植(格納)してよいことは云うまでもない。
【産業上の利用可能性】
【0072】
本発明は、ガスのニオイを人の感覚で表現することが可能なニオイ測定装置を提供するものであるため、ニオイ測定装置の製造、販売に寄与するので、産業上の利用可能性を有する。
【図面の簡単な説明】
【0073】
【図1】本発明が適用可能な実施形態のニオイ測定装置の外観斜視図である。
【図2】実施形態のニオイ測定装置の機構部の概略構成を示すブロック図である。
【図3】ニオイ測定装置の機構部を構成するチャンバの断面図である。
【図4】一部がチャンバ内に密閉される基板の平面図である。
【図5】半導体ガスセンサの作動原理を示す回路図である。
【図6】ニオイ測定装置の制御部の概略構成を示すブロック図である。
【図7】快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義された2次元座標を有するニオイ感応マップ及び位置ベクトルを示すと共に、被検者30人にそれぞれ5種類のニオイガスを嗅がせたときの偏差を模式的に示したニオイ感応マップの説明図である。
【図8】半導体ガスセンサの出力電圧を模式的に示す説明図である。
【図9】一般的な自己組織化マップの入力層と競合層との関係を示す説明図である。
【図10】5種類のニオイガスを実施形態の半導体ガスセンサで測定し特徴値を対応させた自己組織化マップの説明図である。
【図11】自己組織化マップを分割しニオイ感応マップ上に平行移動するときの概念を示す説明図である。
【図12】ニオイ感応マップに自己組織化マップを分割して非線形投影したニオイ感応投影マップの説明図である。
【符号の説明】
【0074】
1 ニオイ測定装置
7 タッチパネル(表示手段)
10 チャンバ
15 マスフローコントローラ(ガス導入手段の一部)
16 ポンプ(ガス導入手段の一部)
30 半導体ガスセンサ
41 タッチパネル制御部(表示手段の一部)
42 コンピュータ(記憶手段、特徴値算出手段、ニオイ算出手段、翻訳手段)
44 プログラマブルロジックコントローラ(測定手段の一部)
46 センサ制御部(測定手段の一部)
【技術分野】
【0001】
本発明はニオイ測定装置に係り、特に、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置に関する。
【背景技術】
【0002】
我国の悪臭防止法で規定されている嗅覚測定法は、臭気判定士により管理され、一定の嗅覚試験に合格したパネルにより実際の官能試験が行われる。しかしながら、1検体あたりの測定時間は20〜40分程度必要であり、嗅覚疲労等のパネルの疲労を考えると、1日に測定できる検体数は10試料に満たない。従って、安定してニオイを測定可能なニオイ測定装置で予備的にニオイを測定して、問題のあるニオイについて、パネルによる官能試験を行う方が効率的である。
【0003】
このため、従来、半導体ガスセンサによりニオイ(臭気)ガスの濃度に応じた抵抗値変化と、パネラによるニオイガスの示す臭気強度との対応関係を表した検量線を作成し、この検量線に基づいて測定した検体のニオイ強度を算出する技術が開示されている(例えば、特許文献1参照)。また、半導体ガスセンサとニオイ強度との関係を、人の感覚強度に合わせて予め設定しておき、半導体ガスセンサからの出力をニオイ強度に変換することで、ニオイ強度の診断を行う方法が開示されている(例えば、特許文献2参照)。更に、小型化を図るために、一つの半導体ガスセンサを用いて複数のニオイ物質を検出する場合に、半導体ガスセンサからの出力が同一となるように調整する技術も開示されている(例えば、特許文献3参照)。
【0004】
なお、本発明に関連する技術として、人の快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標上の快適度ベクトルモデルが開示されている(例えば、非特許文献1参照)。また、コホーネン(Kohonen)によって開発された自己組織化マップが知られている(例えば、非特許文献2参照)。
【0005】
【特許文献1】特開平05−188027号公報
【特許文献2】特開平08−320316号公報
【特許文献3】特開2004−233326号公報
【非特許文献1】「快適度の客観的評価と脳波計測」JASE SYMPOSIUM No.06−04,13−22 2004 吉田 倫幸
【非特許文献2】「自己組織化マップ(Self-OrganizingMap)の基礎」ISDL Report No.20050822007 2006年1月8日 伊藤 冬子、廣安 知之、三木 光範
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した特許文献1〜3の技術では、半導体ガスセンサの出力を人のニオイ感覚に合うようにニオイ強度を調整する一次元的な処理を行い、悪臭に対するニオイ測定を主題としているため、人のニオイ感覚を総合的に測定し、その感覚を表現することは難しい。つまり、従来技術では、例えば、快適なニオイや、わくわくするニオイに対して、人の感覚と同じように測定することは難しかった。
【0007】
本発明は上記事案に鑑み、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は、測定対象のニオイガスをチャンバ内に導入するガス導入手段と、前記チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサと、前記ガス導入手段で前記チャンバ内にニオイガスが導入された状態で前記半導体ガスセンサの出力を測定する測定手段と、前記測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値を算出する特徴値算出手段と、種々のニオイガスに対し前記特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、前記種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップを予め記憶した記憶手段と、前記記憶手段に記憶されたニオイ感応投影マップに前記特徴値算出手段で算出された複数の特徴値を入力して、前記ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが前記測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルを算出するニオイ算出手段と、を備える。
【0009】
本発明のニオイ測定装置は、チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサを備えており、ガス導入手段により測定対象のニオイガスがチャンバ内に導入され、チャンバ内にニオイガスが導入された状態で測定手段により半導体ガスセンサの出力が測定される。特徴値算出手段により測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値が算出される。記憶手段には、種々のニオイガスに対し特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップが予め記憶されている。ニオイ算出手段により、記憶手段に記憶されたニオイ感応投影マップに特徴値算出手段で算出された複数の特徴値を入力して、ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルが算出される。
【0010】
本発明において、ニオイ算出手段で算出された位置ベクトルをニオイ感応マップの2次元座標上に表示する表示手段を更に備えていれば、オペレータが表示手段を参照することによりニオイを視覚的に把握することができる。自己組織化マップは、該自己組織化マップを構成する各ノードにランダムな初期値を与え、各ノード間距離が最適になるようにノード結合重みが算出されていることが好ましい。また、ニオイ感応投影マップは、複数に分割された自己組織化マップが平行移動、回転、及び変形されることによりニオイ感応マップに非線形投影されていることが望ましい。更に、特徴値は、半導体ガスセンサの出力電圧の最大値、該最大値をとる時間、半導体ガスセンサの出力電圧の時間による微分最大値、該微分最大値をとる時間、及び、半導体ガスセンサのうち少なくとも1の半導体ガスセンサのヒータ電圧に動的非線形信号を印加し、該少なくとも1つの半導体センサの出力電圧を高速フーリエ変換したときの主成分を含むようにしてもよい。また、ニオイ算出手段で算出された位置ベクトルが、2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、測定対象のニオイガスを人が嗅いだとき、それぞれ、わくわく、かいてき、たいくつ、いらいらするニオイと翻訳する翻訳手段を更に備えるようにしてもよい。このとき、翻訳手段は、位置ベクトルの大きさを数値化し、該数値を含む述語を組み合わせた文章によって、ニオイガスを人が嗅いだときの感覚として翻訳すれば、装置に不慣れなオペレータでも測定対象のニオイガスのニオイを把握することができる。このとき、翻訳手段で組み合わされた文章を表示手段で表示することが望ましい。
【発明の効果】
【0011】
本発明によれば、ニオイ算出手段により、方向及び大きさがニオイガスを人が嗅いだときのニオイ及びその程度として対応する、ニオイ感応マップの2次元座標上の位置ベクトルが算出されるので、測定対象のガスのニオイを人の感覚で表現可能なニオイ測定装置を実現することができる、という効果を得ることができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明に係るニオイ測定装置の最良の実施の形態について説明する。
【0013】
(構成)
図1に示すように、本実施形態のニオイ測定装置1は、正面にフロントパネル3と、他の5面を覆い後述するように機構部、制御部及び電源部を内蔵した箱状の筺体2を有している。フロントパネル3の上部には、情報を表示すると共に、オペレータから操作命令を受けるためのタッチパネル7が配置されている。
【0014】
フロントパネル3の下部からは、ニオイ測定対象の検体周囲のガス(以下、ニオイガスという。)を後述するチャンバ内に導くためのサンプル管5が導出されている。サンプル管5には、外径4mm、内径3mmで、比較的ガス成分の吸着が少ないポリテトラフルオロエチレン(PTFE)製チューブが用いられている。サンプル管5の一端側(先端側)には、ニオイガス測定の際にオペレータが検体に向けて把持するためのグリップ6が固着されている。オペレータが外径4mmのサンプル管5を安定して把持することは難しいため、グリップ6には、最大直径φ25mm、長さ150mmの樹脂製のものが用いられている。なお、グリップ6は、ニオイガス測定時以外は、フロントパネル3の上部側面に配置されたグリップホルダ4内に収容される(図1に示す状態)。
【0015】
グリップ6内にはサンプル管5が埋設されており、フロントパネル3からのグリップ6の端部までのサンプル管5の長さは90cmに設定されている。すなわち、サンプル管5の長さは、オペレータが検体にグリップ6を向けると共に、タッチパネル7にタッチし易い長さとされている。
【0016】
図2に示すように、ニオイ測定装置1の機構部は、3つの電磁3方弁(以下、電磁弁という。)18、19、20、複数の半導体ガスセンサ等を内蔵したチャンバ10、チャンバ10の下流側に配置されチャンバ10内に流れる気体流量を一定量に制御するマスフローコントローラ(以下、MFCという。)15、MFC15の下流側に配置されチャンバ10内に流れる気体を吸引するポンプ16、キャリアガス(清浄された空気)を発生させる図示を省略したキャリアガス発生ユニット、及び、これらを接続する外径3mm、内径2mmのPTFE製チューブで構成されている。
【0017】
サンプル管5の他端側は電磁弁18のCOMポートに接続されており、電磁弁18のNOポートはチューブ17で電磁弁19のNCポートに接続されている。電磁弁19のNOポートはチューブ9でキャリアガス発生ユニットに接続されており、電磁弁19のCOMポートはチューブでチャンバ10の一側に接続されている。チャンバ10の他側はチューブでMFC15の一側に接続されており、MFC15の他側はチューブでポンプ16の一側(吸引側)に接続されている。ポンプ16の他側(排出側)はチューブで電磁弁20のCOMポートに接続されており、電磁弁20のNOポートはチューブで筺体2に形成された排気口(不図示)まで導出されている。また、電磁弁18及び電磁弁20のNCポート同士は、チューブ14で接続されている。なお、チャンバ10やMFC15の接続では、気密性を確保するために、フェラルを有するコネクタジョイントが用いられている。
【0018】
キャリアガス発生ユニットは、筒状のカラム内に活性炭とシリカゲルとが充填されており、その両端面にはチューブ9内への異物の侵入を防止するためのメッシュが配設されている。キャリアガス発生ユニットの一端面側は、筺体2から若干外側に突出(露出)しており、他端面側の外周には雄ねじが螺設されている。電磁弁19のNOポートから導出されたチューブ9は筺体2に固定された円盤状の装着フランジの中央部に接続されている。装着フランジは側周面を有した断面コ字状の形状を有しており、側周面には雌ねじが螺設されている。このため、装着フランジの側周面に螺設された雌ねじにキャリアガス発生ユニットの雄ねじを羅合させることで、筺体2の外部からキャリアガス発生ユニットの装着ないし交換が可能である。キャリアガス発生ユニットが装着フランジに装着された状態でポンプ16の吸引力で吸引されると、キャリアガス発生ユニットの一端面側から外気が取り込まれ、取り込まれた外気が活性炭とシリカゲルとで清浄され、キャリアガスを他端面側から排出する。
【0019】
本実施形態では、ポンプ16に、KNF社製の型式番号830KNDCを使用した。このポンプの概略仕様は、定格電圧12V、流量(気体吸引量)3.1リットル/分、サイズ77×30.7×53.5mmである。MFC15には、ESTEC社製の型式番号E40を使用した。このMFCの概略仕様は、定格電圧±15V、流量レンジ0〜400ミリリットル/分、流量精度±1%である。また、電磁弁18、19、20には、CKD社製の型式番号AG31−01−2を使用した。この電磁弁の応答速度は数十ミリ秒であり、内部はPTFE加工が施されている。
【0020】
図3に示すように、チャンバ10は、ステンレス製で箱形のチャンバ下蓋21、チャンバ上蓋22、枠状のゴムパッキン23及びステンレス製ボルト(不図示)で構成されており、基板25にマウントされた複数の半導体ガスセンサ30をチャンバ内に密閉した構造が採られている。すなわち、半導体ガスセンサ30がマウントされた基板25を、ゴムパッキン23を介して上下両側から挟み、気密性を保持するために、チャンバ上蓋22側及びチャンバ下蓋21側の両側から、それぞれチャンバ下蓋21及びチャンバ上蓋22に達する長さのステンレス製ボルトで締め付けられている。なお、チャンバ下蓋21及びチャンバ上蓋22は、半導体ガスセンサ30等に対しチャンバ10の外部で発生するノイズを遮断するために、筺体2に電気的に接続されたシールド構造を有している。
【0021】
図4に示すように、チャンバ10内には、7個の半導体ガスセンサ30、1個の湿度センサ31、1個の温度センサ(サーミスタ)32の合計9個のセンサが収容されている。一般に、チャンバ10の内容積はセンサの応答性を高めるために、小さい方が好ましい。本実施形態では、9個のセンサを基板25上に密集配置することで、チャンバ下蓋21と基板25(基板25上にマウントされたセンサ等の部品を除く。)とが画定する内容積を約35ミリリットルとした(図3も参照)。なお、チャンバ上蓋22と基板25とが画定する空間は、センサから導出されたピンや基板25の裏面側(図3の上側)にマウントされた回路素子を収容するために形成されたものである。
【0022】
本実施形態では、半導体ガスセンサ30として、メタンに感応するTGS2611、アミン系ガスに感応するTGS826、エタノールに感応するTGS822、主に調理臭や空気の汚れに感応するTGS2600、有機ハロゲンに感応するTGS832、メタノールに感応するTGS2620、イオウ系ガスに感応するTGS2602(いずれも、フィガロ技研(株)の型式番号)を使用した。
【0023】
図5に示すように、半導体ガスセンサ30は、例えば、アルミナセラミックチューブの周部に酸化スズ(SnO2)の微粒子を焼結した円筒状のn型酸化物半導体30Aを有している。アルミナセラミックチューブは中空とされており、アルミナセラミックチューブ内にヒータコイル30Bが挿入されている。n型酸化物半導体30Aの両端にはそれぞれ2個の電極がプリントされており、これらの電極にリードの一端が接合されている。リードの他端及びヒータコイル30Bのリードの両端は円柱状の樹脂成形ベースの上面周縁部にプリントされたパッドにワイヤボンディングされている。樹脂成形ベースの上部には樹脂成形ベースと同外径で円筒状の樹脂成形筒が樹脂成形ベースに接着されており、n型酸化物半導体30Aは樹脂成形ベースの上面に接触しないように樹脂成形筒の中央部に配置されている。樹脂成形ベース及び樹脂成形筒の外周部には筒状の樹脂カバーの内周が接着されており、樹脂カバーの上部には図示しないステンレス製のメッシュがはめ込まれた開口が形成されている。また、樹脂成形ベースの各パッドからはピンが立設されている。
【0024】
n型酸化物半導体30Aはヒータコイル30Bにより感応気体に応じて200°C〜400°Cに加熱され還元性ガスを検出する。大気中で酸素はn型酸化物半導体30Aの表面に負イオン吸着しており、還元性ガスが存在するとn型酸化物半導体30A表面で還元性ガスによる酸化反応が起こる。このとき、吸着酸素に捕捉されていた電子が半導体へ移行しn型酸化物半導体30Aに導電率の変化が生じ、この導電率の変化を検出することにより還元性ガスの存在や濃度を検出することができる。
【0025】
各半導体ガスセンサ30は、n型酸化物半導体30Aに、半導体ガスセンサ30からの出力電圧Voutを取り出すための検出抵抗RLを直列に挿入し作動電圧Vcが印加されると共に、ヒータ30Bにヒータ電圧が印加される。出力電圧Voutは検出抵抗RLの両端電圧とされている。なお、作動電圧Vc及び出力電圧Voutの低電位側はグランドとされている。
【0026】
本実施形態のニオイ測定装置1では、半導体ガスセンサ30の出力電圧Voutをサンプリングレート100Hzで取得する。n型酸化物半導体30Aの抵抗値をR0(Ω)、検出抵抗RLの抵抗値をRL(Ω)、作動電圧Vcの電圧値をVc(V)、出力電圧Voutの電圧値をVout(V)とすると、抵抗値R0は、R0={(Vc−Vout)/Vout}×RLで与えられる。従って、n型酸化物半導体30Aの初期値に対する比抵抗値をRiとすると、比抵抗値Riは、Ri=(R0/Rs)−1で与えられる。
【0027】
図4に示すように、基板25の一側には、(湿度センサ31や温度センサ32を含む)全てのセンサへの作動電圧を供給するための作動電圧コネクタ27及び各半導体ガスセンサ30のヒータ30Bへのヒータ電圧を供給するためのヒータ電圧コネクタ28がマウントされており、他側には、各検出抵抗RL両端の出力電圧Voutを出力するための出力電圧コネクタ26がマウントされている。なお、チャンバ10の外側で、かつ、出力電圧コネクタ26側の基板25の領域には、検出抵抗RLがマウントされている(図4では不図示)。
【0028】
図6に示すように、ニオイ測定装置1の制御部は、ニオイ測定装置1全体を制御するコンピュータ42を有している。コンピュータ42は、中央演算装置として機能するCPU、コンピュータ42の基本動作プログラム及びニオイ解析エンジン(後述するニオイ感応投影マップ)やプログラムデータを格納したROM、CPUのワークエリアとして機能するRAM及びインターフェース等を含んで構成されている。
【0029】
コンピュータ42の外部バスには、タッチパネル7の表示や操作命令を制御するタッチパネル制御部41及び検体に対するニオイ測定結果等を記憶するハードディスク(HD)43が接続されている。なお、タッチパネル制御部41は、タッチパネル7に接続されている。また、コンピュータ42には、インターフェースを介してプログラマブルロジックコントローラ(PLC)44に接続されている。
【0030】
PLC44は、CPU、ROM、RAMの他に、D/Aコンバータ、A/Dコンバータ及びI/Oを有して構成されている。本実施形態では、PLC44に、KEYENCE社製の型式番号KV−700を使用した。PLC44は、電磁弁18〜20、MFC15、ポンプ16等のアクチュエータを制御するアクチュエータ制御部45、各半導体ガスセンサ30に応じて作動電圧Vcを供給し、上述したように100Hzで各検出抵抗RLの出力電圧Voutのサンプリングを行うセンサ制御部46、及び、各半導体ガスセンサ30に応じて独立してヒータ電圧を供給するヒータ制御部47に接続されている。なお、PLC44は、センサ制御部46から出力(サンプリング)された各出力電圧Voutのアナログ電圧をA/Dコンバータによりデジタル電圧に変換した後、イーサネット(Ethernet)(登録商標)を介してコンピュータ42に送出する。従って、PLC44は、コンピュータ42からの命令によりアクチュエータ制御部45、センサ制御部46、ヒータ制御部47を制御すると共に、コンピュータ42に出力電圧Voutを送出するスレーブコンピュータとして機能する。
【0031】
ニオイ測定装置1の電源部(不図示)は、100V、400W商用交流電源から24V直流電源に変換する第1電源ユニット、24V直流電源から12V直流電源に降圧する第2電源ユニット、レギュレータを備え商用交流電源から定格±15Vの電源に変換する第3電源ユニット、3端子レギュレータを備え12V直流電源から5V直流電源に降圧する第4電源ユニットを有している。なお、本実施形態のニオイ測定装置1は、PLC44、タッチパネル7が第1電源ユニットから供給される電圧、コンピュータ42、ポンプ16、電磁弁18〜20が第2電源ユニットから供給される電圧、MFC15が第3電源ユニットから供給される電圧、各センサが第4電源ユニットから供給される電圧でそれぞれ作動する。
【0032】
また、ニオイ測定装置1は、MFC15、ポンプ16、制御部40等の発熱部を有しているため、これらを冷却するための図示しない複数のファンユニットを備えている。これらのファンユニットは、筺体2の裏面側(フロントパネルの反対側)近傍に配置されており、筺体2の裏面には排気用の開口が形成されている。
【0033】
次に、ROMに格納されたニオイ解析エンジン(ニオイ感応投影マップ)の作成手順について説明する。
【0034】
<ニオイ感応マップの作成>
(1)被検者30人に静寂な室温(25°C)環境下で特定のニオイガスを嗅がせ、脳波データを測定した。このとき、脳波データから基礎律動波を取り出すためのフィルタに通した。脳波データの取得には、頭皮上に配設した2つの電極間の電位差を増幅して取り出す双極導出法を用い、頭皮上の電極配置部位は国際式10−20法を用いた。
【0035】
(2)フィルタ出力に定電位クロス法を適用して変動する波の周期を捉えた。このとき、クロス電位(閾値電位幅)の設定はフィルタ波の振幅をモニタしながら調整した。フィルタ波の電位が設定した片側閾値電位(+)以上の波を閾値電位を越えた時点をチェックし、個々のチェック間隔(周期に対応した時間幅を持つ)を瞬間の周波数に変換した。
【0036】
(3)瞬時周波数の時系列データに高速フーリエ変換法を適用し、スペクトルを抽出した。1つのスペクトルを算出する時間は25.6sで、サンプル点数512点を計算に用いた(50ms刻みのタイムテーブルを作り、算出した周期を50ms(20Hz)毎に再サンプリングした周波数データを使用した。)。スペクトル表示上の最低周波数は1/25.6s、最高周波数は10Hzとなる。計4単位時間(102.4s)の平均スペクトルを求め、これをゆらぎスペクトルとした。
【0037】
(4)次に、横軸にゆらぎスペクトルの周波数、縦軸に各ゆらぎスペクトルの周波数に対応したスペクトル密度をとって、ゆらぎ特性を両軸常用対数グラフ上に表示した。スペクトルの傾斜度を数値化するために、変曲点を検出して低周波数領域と高周波数領域とに二分し、各領域でゆらぎ周波数の対数変換値を独立変数、スペクトル密度の対数変換値を従属変数にとって直線回帰式を算出し、その傾き係数で傾斜度を代表させた。
【0038】
(5)公知のヘラー(Heller,w)の2次元モデル、又は、上述した非特許文献1の快適度ベクトルモデルと同様、図7に示すように、興奮、沈静の程度を表す座横軸標系と、快、不快の程度を表す縦軸座標系とで定義される2次元座標系を準備し、被検者の脳波データについて当該2次元座標の原点Oからの位置ベクトルを算出した。すなわち、左前頭部の周波数ゆらぎの傾斜度をFp1slope、右前頭部の周波数ゆらぎの傾斜度をFp2slopeとすると、位置ベクトルの角度及び大きさは次式(1)で与えられる。なお、角度は原点Oと興奮座標系とを結ぶ方向を0°とした。
【0039】
【数1】
【0040】
図7は、上記(1)〜(5)に従って、被検者30人に5種類のニオイ(植物精油臭、アミン臭、アルデヒド臭、芳香成分混合臭A、芳香成分混合臭B)を嗅がせたときの位置ベクトルをマップ化したニオイ感応マップを表している。図7において、各四角形の中心(対角線交点)は被検者集団の平均値を表し、各四角形の中心から各四角形の頂点までの距離が標準偏差に比例している。本実施形態では、ニオイ感応マップの全方向が埋まるように、被検者30人に数十種のニオイを嗅がせたときの位置ベクトルを表したニオイ感応マップを用いた。
【0041】
<自己組織化マップの構築>
(6)上述した数十種のニオイガスについて、室温環境下で、ニオイ測定装置1の機構部(図2参照)を清浄した後、ポンプ15及びMFC15を作動させ、各ニオイガスをチャンバ10内に導入し、1分間、各半導体ガスセンサ30の出力電圧Voutをサンプリングレート100Hzで取得して、時系に従ってメモリに記憶した。このとき、TGS2602を除く、TGS2611、TGS826、TGS822、TGS2600、TGS832、TGS2620の6個の半導体ガスセンサのヒータコイル30Bには5Vの定電圧を印加し、TGS2602のヒータコイル30Bには1.5Vから5.2Vまでの余弦波を20秒周期(動的非線形信号)で印加した。図8は、7個の半導体ガスセンサ30の出力電圧を模式的に示したものである。
【0042】
(7)メモリに時系に従って記憶した各半導体ガスセンサ30の出力電圧Voutのうち、TGS2602を除く6個の半導体ガスセンサの出力電圧の最大値、その最大値をとるときの時刻、10msを単位時間としたとき(サンプリングレート100Hz)の時間による微分最大値、その微分最大値をとるときの時刻を、当該検体のガスに対する特徴値として算出した。各特徴値は半導体ガスセンサについて4個取得されるため、半導体ガスセンサ6個分では24個取得される。また、TGS2602の出力電圧を高速フーリエ変換して得られた第1成分、第2成分、第3成分の値も特徴値とした。このため、本実施形態では、各半導体ガスセンサの出力電圧Voutから27次元の特徴値を得ることができる。なお、温度センサ32及び湿度センサ31は、各半導体ガスセンサ30のガス感応性が温度及び湿度に依存することから、測定した温度及び湿度により予め設定された温度−湿度補正テーブルで各半導体ガスセンサ30の出力電圧Voutを補正した。
【0043】
(8)次に、100×100のノードからなる自己組織化マップ(Self-Organizing Map、以下、SOMと略称する。)を作成し、各ノードに適当(ランダム)な初期値を与え、各ノード間距離が最適となるように、コホーネン学習則に従い、各ノードの結合重みを計算した。
【0044】
ここで、SOM及びコホーネン学習則について簡単に説明する。なお、両者は上述した非特許文献2の通り公知であり、例えば、インターネット等により更なる詳細事項を把握することができる。
【0045】
SOMは、コホーネン(Kohonen)によって開発された2層型ニューラルネットワークの一種である。一般に、ニューロンの基本的なモデルは、mi(t+1)=mi(t)+hci(t){x(t)−mi(t)}で表され、多数の入力xiの線形加重和Σxiwiがある閾値より大きい場合に「1」、そうでない場合に「0」を出力する。図9に示すように、SOMの第1層はn次元の入力層x(t)であり、第2層は競合層と呼ばれ一般に2次元配列となっている。競合層のベクトルは、参照ベクトルmi(t)で表され、入力層のn次元と同様にn個の要素を持つ。
【0046】
コホーネン学習則では、以下の手順により、SOMに対して教師なしの競合学習が行われる。(A)すべての参照ベクトルmiの要素をランダムに決定する。(B)入力ベクトルX(t)を与える。このとき、x(t)とのユークリッド距離(x−miの絶対値)が最小となるニューロンiを探す。このニューロンをcとすると、abs(x−mc)=min{abs(x−mi)}と表すことができる。(C)参照ベクトルmcを持つニューロンを勝者ユニットとする。(D)勝者ユニット及びその周辺の近傍Nc内のユニットは次式に従って入力ベクトルを学習する:mi(t+1)=mi(t)+hci(t){x(t)−mi(t)}。ただし、hciは近傍関数であり、i∈Ncならhci=α(t)、そうでないならhci=0と定義する(α(t)は学習率係数)。(E)上記(B)〜(D)をT回繰り返し、学習を行う。近傍サイズはNc=Nc(t)という時間の関数で表され、学習とともにそのサイズを小さくしていく。(F)すべての入力ベクトルに対して、上記(B)〜(E)を繰り返し行うことにより、各入力ベクトルに類似したユニットが集まるようになる。
【0047】
図10は、上記手順により、上述した5種類のニオイガスの特徴値に基づいて構築したSOMを模式的に表したものである。ノードに配置された△、○、□、×、◇の各点には27次元特徴値が対応しており(図9参照)、各点の数がニオイガスに対して半導体ガスセンサ30で測定したおおよその回数を示している(同一ノードに配置され場合の測定回数は現れていない)。
【0048】
<ニオイ感応投影マップの構築>
(9)構築したSOMを分割し、それぞれの分割平面をニオイ感応マップに非線形投影を行った。この非線形投影は、以下の変換行列で表される平行移動、回転、拡大・縮小によって行ったが、更に変形するようにしてもよい。
【0049】
【数2】
【0050】
図11は、分割平面をニオイ感応マップに平行移動したときの概念を表している。本実施形態では、ノードに配置された各点がニオイ感応マップの四角形内にほぼ入るように平行移動、回転、拡大・縮小を行った。図12は、以上の手順で構築したニオイ感応投影マップの模式図である。このように、ROMに格納されたニオイ感応投影マップは、ニオイ感応マップにSOMの分割平面が非線形投影されたものであるが、本実施形態では、ニオイ感応投影マップの全方向でニオイ感応マップとSOMとが対応するように、上述した数十種のニオイガスについてニオイ感応投影マップが作成されている。
【0051】
(動作)
次に、本実施形態のニオイ測定装置1の動作について、コンピュータ42のCPU(以下、CPUと略称する。)を主体として説明する。
【0052】
ニオイ測定装置1に電源が投入されると、ROMに格納された基本動作プログラムやニオイ解析エンジンがRAMに展開され、タッチパネル制御部41を介してタッチパネル7にニオイ測定の準備中である旨の初期画面を表示させる初期設定処理を実行する。次いで、CPUは、PLC44からPLC44の初期設定処理終了のステータスを受信すると、検体に対するニオイの測定を行うためのニオイ測定ルーチンを実行する。
【0053】
ニオイ測定ルーチンでは、まず、PLC44、アクチュエータ制御部45を介して電磁弁18〜20をオフ状態(非通電状態)とさせると共に、PLC44、センサ制御部46、ヒータ制御部47を介して、全センサに作動電圧を印加させ半導体ガスセンサ30にヒータ電圧を印加させる(上述したようにTGS2602のヒータコイル30Bには1.5〜5.2Vの余弦波電圧を20秒周期で印加し、それ以外の6個の半導体ガスセンサには5.0Vの定電圧を印加させる。)。次いで、MFC15は安定作動のために電源投入後5分間の暖気と0点補正とが必要なため、ニオイ測定ルーチンの開始からMFC15の安定動作が確保される5分が経過するまで待機する。
【0054】
ニオイ測定ルーチンの開始から5分が経過すると、CPUは、アクチュエータ制御部45にポンプ16を作動させチャンバ10内を清浄するチャンバ清浄処理を実行させる。MFC15により、チャンバ10やチューブ内を流れるキャリアガスの流量は400ミリリットルの一定量に制御されている。キャリアガスは、キャリアガス発生ユニット(→チューブ9)→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部へ排出される。これにより、チャンバ10内及び電磁弁19とチャンバ10とを接続するチューブ内がキャリアガスで清浄されると共に、チャンバ10内に内蔵された各半導体ガスセンサ30が一定温度に維持(冷却)される。ポンプ16を作動させてから更に5分が経過すると、CPUは、タッチパネル7にニオイ測定が可能である旨を表示させ、タッチパネル7に表示されたニオイ測定開始ボタンがタッチされるまで待機する。
【0055】
ニオイ測定開始ボタンがタッチ(押下)されると、CPUは、PLC44に、電磁弁19をオン状態(通電状態)とさせ、検体からのニオイガスを8個の半導体ガスセンサ30で1分間測定したときの出力電圧Voutをデジタル電圧としてCPUに出力させるニオイ測定処理を実行する。このとき、CPUは、出力電圧Voutを上述した温度−湿度補正テーブルで補正し補正後の出力電圧をハードディスク43内に時系列的に格納する。検体からのニオイガスは、サンプル管5→電磁弁18(→チューブ17)→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部へ排出される。CPUは、1分が経過すると、PLC44に後述する清浄処理を実行させると共に、ニオイ測定が終了した旨をタッチパネル7に表示させる。
【0056】
CPUは、ニオイガスの吸引が終了した時点で、PLC44に機構部の清浄処理を実行させる。PLC44は、CPUから清浄処理の実行命令を受けると、電磁弁19をオフ状態とさせ、5分間、チャンバ10内及び電磁弁19とチャンバ10とを接続するチューブ内を清浄する。
【0057】
続いて、PLC44は、電磁弁19をオン状態とさせ、30秒間、外気でチューブ17内を清浄する。サンプル管5には外気が流入し、外気は、サンプル管5→電磁弁18→チューブ17→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20の順に流れ、筺体2の外部に排出される。
【0058】
次いで、PLC44は、電磁弁18をオン状態、電磁弁19をオフ状態、電磁弁20をオン状態とさせ、30秒間、サンプル管5内を清浄する。この状態では、キャリアガスが、チューブ9→電磁弁19→チャンバ10→MFC15→ポンプ16→電磁弁20→チューブ14→電磁弁18→サンプル管5の順に流れ、サンプル管5の一端側(先端側)から外気に排出される。
【0059】
次に、PLC44は、電磁弁18をオフ状態、電磁弁19をオフ状態、電磁弁20をオフ状態とさせ、5分間、チャンバ10に内蔵された各半導体ガスセンサ30が安定状態となるまで待機する。以上の清浄処理には、合計11分を要するため、この11分の間、タッチパネル7には、清浄中である旨が表示される。PLC44は、清浄処理が終了すると、CPUに清浄処理の終了を報知する。この報知を受けたCPUは、タッチパネル7に機構部の清浄が完了した旨を表示させる。これにより、ニオイ測定装置1は、再度、上述したニオイ測定処理が可能な状態となる。
【0060】
また、CPUは、PLC44による機構部の清浄処理に並行して、ハードディスク43内に格納した7個の半導体ガスセンサ30の出力電圧Voutから、上述した27個の特徴値を算出してニオイ感応投影マップに入力し(SOM上の位置を求め)、SOMが非線形投影されたニオイ感応マップの2次元座標上の座標値、すなわち、原点からの位置ベクトルを得る。次いで、CPUは、ニオイ感応マップ及び得られた位置ベクトルを、タッチパネル制御部41を介してタッチパネル7に表示させる(図7参照)。上述したように、この位置ベクトルの方向及び大きさが、人が測定対象のニオイガスを嗅いだときのニオイ及びその程度に対応するため(上記(5)参照)、オペレータはディスプレイ7を参照することで、ニオイガスのニオイ及びその程度を把握することができる。
【0061】
次に、CPUは、2次元座標上の原点からの位置ベクトルを、オペレータが分かる言葉に翻訳する。図7に示すように、本実施形態では、2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置ベクトルがそれぞれ位置するときに、「わくわくするニオイ」、「かいてきなニオイ」、「たいくつなニオイ」、「いらいらするニオイ」に対応させ、その程度を表す位置ベクトルの大きさ(絶対値)を算出する。上述した式(1)から、位置ベクトルの大きさはパーセントで表される。従って、CPUは、位置ベクトルから、上述した述語と数値とにより、例えば、「いらいらするニオイ70%」等の人が分かる言葉に対応させ(翻訳し)、タッチパネル制御部41を介してタッチパネル7に、ニオイ感応マップに検体のニオイを表すベクトル及び対応させた言葉を表示する。
【0062】
次いで、CPUは、検体に対するニオイ測定が終了した旨をタッチパネル7に表示させると共に、ハードディスク43内に測定結果を格納させてニオイ測定ルーチンを終了する。このとき、測定を行った日付や検体名、検体の位置等の検体の属性情報を併せて記憶させることが好ましい。なお、インターフェースを介して接続されたパーソナルコンピュータを操作することで、プリンタからニオイ測定結果を出力するようにしてもよい。
【0063】
(作用等)
次に、本実施形態のニオイ測定装置1の作用等について説明する。
【0064】
本実施形態のニオイ測定装置1は電磁弁18、20をオフ状態、電磁弁19をオン状態に制御することでニオイガスをチャンバ10内に導入(採取)し、半導体ガスセンサ30でニオイガスの測定を行うことができる。また、電磁弁18〜20を制御することにより、チャンバ10内、電磁弁19とチャンバ10とを接続するチューブ内、チューブ17内、及び、サンプル管5内を清浄することができる。従って、シーケンス制御によりサンプル管5内に残留したニオイガスを含めニオイガスの流路の清浄を行うことができるので、複数の検体に対して精度良くかつ安定してニオイ測定を行うことができる。更に、ポンプ16及びMFC15によりチャンバ10内の気体を一定量(400ミリリットル/分)で吸引するため、ニオイ測定処理で、ニオイガスは吸引されチャンバ10に充たされるので、安定定常状態で半導体ガスセンサ30によりニオイガスを測定することができると共に、装置内にバッファや装置外に呼気だめを設ける必要がない。従って、ニオイ測定装置1のダウンサイジングを図ることができると共に、筺体2外の構成部材を極力小さくすることができる。
【0065】
また、本実施形態のニオイ測定装置1では、ROMに、図12に示したように、快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義されたニオイ感応マップに、半導体ガスセンサ30の出力電圧Voutから算出された27個の特徴値によるSOMを分割し非線形投影したニオイ感応投影マップが格納されている。ニオイ測定装置1は、半導体ガスセンサ30の出力電圧Voutからニオイガスの特徴値を算出して、ニオイ感応投影マップに算出された特徴値を入力して、ニオイ感応マップの2次元座標上の原点からの位置ベクトルを算出し、ディスプレイ7上にニオイ感応マップと位置ベクトルとを表示する。この位置ベクトルの方向及び大きさは測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応するため、ニオイガスを人の感覚で表現することができる。すなわち、本実施形態のニオイ測定装置1は、2次元座標上の位置ベクトルで表現するようにしたので、従来技術のように1つの座標系のメモリを調整する技術に対して、ニオイガスについて包括的(定性的かつ定量的)に捉えることが可能である。
【0066】
また、算出した位置ベクトルからオペレータの分かる言葉に対応させて(翻訳して)タッチパネル7上に表示するので(例えば、「いらいらするニオイ70%」)、ガスのニオイを人の感覚で表現することができる。更に、ニオイ感応投影マップは、ニオイ感応マップの2次元座標の全方向についてSOMに対応しているため、悪臭に限らず、良いニオイに対しても、人の感覚で表現することが可能である。
【0067】
なお、本実施形態では、2つの電磁弁18、19を用いてキャリアガスとニオイガスとを選択的にチャンバ10に導入する例を示したが、本発明はこれに限定されるものではない。例えば、電磁(3方)弁18、19に代えて、1つの電磁4方弁を用いるようにしてもよい。このような構成の場合には、アクチュエータ制御部45の小型化も図ることができ、ひいては、ニオイ測定装置1全体を更に小型化することができる。
【0068】
また、本実施形態では、発明者らが実際に試作したニオイ測定装置1を例示したが、量産化を図る場合には、コンピュータ42とPLC44とを一体化させ制御部の小型化を図るようにしてもよく、また、各部の作動電圧を12V、5Vに統一し、電源部を構成するユニット数を少なくするようにしてもよい。
【0069】
更にまた、本実施形態では、ヒータ制御部47が独立して各半導体ガスセンサ30のヒータコイル30Bにヒータ電圧を供給する構成を採用しているので、ヒータ制御部47は、温度センサ32で計測したチャンバ10内の温度情報をセンサ制御部46から受け取り、例えば、予め設定したテーブルや数式に従って、各半導体ガスセンサ30のガス感応温度が好適な範囲となるように制御するようにしてもよい。
【0070】
また、本実施形態では、ニオイ感応投影マップ(ニオイ感応マップ)上の位置ベクトルが2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、それぞれ、わくわく、かいてき、たいくつ、いらいらすると対応させる例を示したが、より細かく(例えば、30°毎に)人の感覚に対応させるようにしてもよい。
【0071】
そして、本実施形態では、ニオイ測定装置1に搭載された半導体ガスセンサ30で特徴値を算出してニオイ感応投影マップを作成した例を示したが、量産では、半導体ガスセンサ30と同一仕様の半導体ガスセンサで特徴値を演算して作成したニオイ感応投影マップをROMに移植(格納)してよいことは云うまでもない。
【産業上の利用可能性】
【0072】
本発明は、ガスのニオイを人の感覚で表現することが可能なニオイ測定装置を提供するものであるため、ニオイ測定装置の製造、販売に寄与するので、産業上の利用可能性を有する。
【図面の簡単な説明】
【0073】
【図1】本発明が適用可能な実施形態のニオイ測定装置の外観斜視図である。
【図2】実施形態のニオイ測定装置の機構部の概略構成を示すブロック図である。
【図3】ニオイ測定装置の機構部を構成するチャンバの断面図である。
【図4】一部がチャンバ内に密閉される基板の平面図である。
【図5】半導体ガスセンサの作動原理を示す回路図である。
【図6】ニオイ測定装置の制御部の概略構成を示すブロック図である。
【図7】快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義された2次元座標を有するニオイ感応マップ及び位置ベクトルを示すと共に、被検者30人にそれぞれ5種類のニオイガスを嗅がせたときの偏差を模式的に示したニオイ感応マップの説明図である。
【図8】半導体ガスセンサの出力電圧を模式的に示す説明図である。
【図9】一般的な自己組織化マップの入力層と競合層との関係を示す説明図である。
【図10】5種類のニオイガスを実施形態の半導体ガスセンサで測定し特徴値を対応させた自己組織化マップの説明図である。
【図11】自己組織化マップを分割しニオイ感応マップ上に平行移動するときの概念を示す説明図である。
【図12】ニオイ感応マップに自己組織化マップを分割して非線形投影したニオイ感応投影マップの説明図である。
【符号の説明】
【0074】
1 ニオイ測定装置
7 タッチパネル(表示手段)
10 チャンバ
15 マスフローコントローラ(ガス導入手段の一部)
16 ポンプ(ガス導入手段の一部)
30 半導体ガスセンサ
41 タッチパネル制御部(表示手段の一部)
42 コンピュータ(記憶手段、特徴値算出手段、ニオイ算出手段、翻訳手段)
44 プログラマブルロジックコントローラ(測定手段の一部)
46 センサ制御部(測定手段の一部)
【特許請求の範囲】
【請求項1】
測定対象のニオイガスをチャンバ内に導入するガス導入手段と、
前記チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサと、
前記ガス導入手段で前記チャンバ内にニオイガスが導入された状態で前記半導体ガスセンサの出力を測定する測定手段と、
前記測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値を算出する特徴値算出手段と、
種々のニオイガスに対し前記特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、前記種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップを予め記憶した記憶手段と、
前記記憶手段に記憶されたニオイ感応投影マップに前記特徴値算出手段で算出された複数の特徴値を入力して、前記ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが前記測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルを算出するニオイ算出手段と、
を備えたニオイ測定装置。
【請求項2】
前記ニオイ算出手段で算出された位置ベクトルを前記ニオイ感応マップの2次元座標上に表示する表示手段を更に備えた請求項1に記載のニオイ測定装置。
【請求項3】
前記自己組織化マップは、該自己組織化マップを構成する各ノードにランダムな初期値を与え、各ノード間距離が最適になるようにノード結合重みが算出されていることを特徴とする請求項1に記載のニオイ測定装置。
【請求項4】
前記ニオイ感応投影マップは、前記複数に分割された自己組織化マップが平行移動、回転、及び変形されることにより前記ニオイ感応マップに非線形投影されていることを特徴とする請求項1に記載のニオイ測定装置。
【請求項5】
前記特徴値は、前記半導体ガスセンサの出力電圧の最大値、該最大値をとる時間、前記半導体ガスセンサの出力電圧の時間による微分最大値、該微分最大値をとる時間、及び、前記半導体ガスセンサのうち少なくとも1の半導体ガスセンサのヒータ電圧に動的非線形信号を印加し、該少なくとも1つの半導体センサの出力電圧を高速フーリエ変換したときの主成分を含むことを特徴とする請求項1に記載のニオイ測定装置。
【請求項6】
前記ニオイ算出手段で算出された位置ベクトルが、前記2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、前記測定対象のニオイガスを人が嗅いだとき、それぞれ、わくわく、かいてき、たいくつ、いらいらするニオイと翻訳する翻訳手段を更に備えたことを特徴とする請求項2に記載のニオイ測定装置。
【請求項7】
前記翻訳手段は、前記位置ベクトルの大きさを数値化し、該数値を含む述語を組み合わせた文章によって、前記ニオイガスを人が嗅いだときの感覚として翻訳することを特徴とする請求項6に記載のニオイ測定装置。
【請求項8】
前記翻訳手段で組み合わされた文章を前記表示手段で表示することを特徴とする請求項7に記載のニオイ測定装置。
【請求項1】
測定対象のニオイガスをチャンバ内に導入するガス導入手段と、
前記チャンバ内に配置され異なるガス感応性を有する複数の半導体ガスセンサと、
前記ガス導入手段で前記チャンバ内にニオイガスが導入された状態で前記半導体ガスセンサの出力を測定する測定手段と、
前記測定手段で測定された半導体ガスセンサの出力から予め定められた複数の特徴値を算出する特徴値算出手段と、
種々のニオイガスに対し前記特徴値算出手段で算出された複数の特徴値に基づいて予め構築された自己組織化マップを複数に分割し、該分割した自己組織化マップをそれぞれ、前記種々のニオイガスに対する人の脳波データを快、不快の程度を表す座標系及び興奮、沈静の程度を表す座標系で定義される2次元座標で表したニオイ感応マップに投影したニオイ感応投影マップを予め記憶した記憶手段と、
前記記憶手段に記憶されたニオイ感応投影マップに前記特徴値算出手段で算出された複数の特徴値を入力して、前記ニオイ感応マップの2次元座標上の原点からの位置ベクトルであって、その方向及び大きさが前記測定対象のニオイガスを人が嗅いだときのニオイ及びその程度に対応する位置ベクトルを算出するニオイ算出手段と、
を備えたニオイ測定装置。
【請求項2】
前記ニオイ算出手段で算出された位置ベクトルを前記ニオイ感応マップの2次元座標上に表示する表示手段を更に備えた請求項1に記載のニオイ測定装置。
【請求項3】
前記自己組織化マップは、該自己組織化マップを構成する各ノードにランダムな初期値を与え、各ノード間距離が最適になるようにノード結合重みが算出されていることを特徴とする請求項1に記載のニオイ測定装置。
【請求項4】
前記ニオイ感応投影マップは、前記複数に分割された自己組織化マップが平行移動、回転、及び変形されることにより前記ニオイ感応マップに非線形投影されていることを特徴とする請求項1に記載のニオイ測定装置。
【請求項5】
前記特徴値は、前記半導体ガスセンサの出力電圧の最大値、該最大値をとる時間、前記半導体ガスセンサの出力電圧の時間による微分最大値、該微分最大値をとる時間、及び、前記半導体ガスセンサのうち少なくとも1の半導体ガスセンサのヒータ電圧に動的非線形信号を印加し、該少なくとも1つの半導体センサの出力電圧を高速フーリエ変換したときの主成分を含むことを特徴とする請求項1に記載のニオイ測定装置。
【請求項6】
前記ニオイ算出手段で算出された位置ベクトルが、前記2次元座標上の快−興奮象限、快−沈静象限、不快−興奮象限、不快−沈静象限に位置するときに、前記測定対象のニオイガスを人が嗅いだとき、それぞれ、わくわく、かいてき、たいくつ、いらいらするニオイと翻訳する翻訳手段を更に備えたことを特徴とする請求項2に記載のニオイ測定装置。
【請求項7】
前記翻訳手段は、前記位置ベクトルの大きさを数値化し、該数値を含む述語を組み合わせた文章によって、前記ニオイガスを人が嗅いだときの感覚として翻訳することを特徴とする請求項6に記載のニオイ測定装置。
【請求項8】
前記翻訳手段で組み合わされた文章を前記表示手段で表示することを特徴とする請求項7に記載のニオイ測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−248352(P2007−248352A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−74291(P2006−74291)
【出願日】平成18年3月17日(2006.3.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(経済産業省関東経済産業局が実施する「平成17年度地域新生コンソシアム研究開発事業」の適用を受ける特許出願)
【出願人】(801000038)よこはまティーエルオー株式会社 (31)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月17日(2006.3.17)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(経済産業省関東経済産業局が実施する「平成17年度地域新生コンソシアム研究開発事業」の適用を受ける特許出願)
【出願人】(801000038)よこはまティーエルオー株式会社 (31)
【Fターム(参考)】
[ Back to top ]